Как работает регулятор оборотов электродвигателя. Какие бывают виды регуляторов оборотов. Как выбрать подходящую схему регулятора. Как сделать регулятор оборотов своими руками. Какие преимущества дает использование регуляторов оборотов.
Принцип работы регулятора оборотов электродвигателя
Регулятор оборотов электродвигателя позволяет изменять скорость вращения вала мотора. Основной принцип работы регулятора заключается в изменении напряжения или частоты тока, подаваемого на обмотки двигателя. Существует несколько основных способов регулировки:
- Изменение напряжения питания
- Изменение частоты питающего тока
- Изменение сопротивления в цепи ротора (для двигателей с фазным ротором)
- Переключение числа пар полюсов статора
При уменьшении напряжения или частоты снижаются обороты двигателя. Это позволяет плавно регулировать скорость вращения в широком диапазоне.
Основные виды регуляторов оборотов
Существует несколько основных типов регуляторов оборотов электродвигателей:
1. Тиристорные и симисторные регуляторы
Работают по принципу фазового управления — изменяют момент подачи напряжения на обмотки двигателя в каждом полупериоде сетевого напряжения. Просты и недороги, но могут вызывать помехи.
2. Транзисторные ШИМ-регуляторы
Используют широтно-импульсную модуляцию для изменения эффективного напряжения на двигателе. Обеспечивают плавную регулировку, но сложнее в изготовлении.
3. Частотные преобразователи
Изменяют частоту питающего напряжения. Позволяют регулировать скорость асинхронных двигателей в широком диапазоне. Дороги, но очень эффективны.
Как выбрать схему регулятора оборотов
При выборе схемы регулятора оборотов необходимо учитывать следующие факторы:
- Тип двигателя (коллекторный, асинхронный)
- Мощность двигателя
- Требуемый диапазон регулирования
- Плавность регулировки
- Наличие реверса
- Условия эксплуатации
Для маломощных коллекторных двигателей подойдут простые тиристорные схемы. Для мощных асинхронных двигателей оптимальны частотные преобразователи. ШИМ-регуляторы универсальны и подходят для большинства применений.
Изготовление регулятора оборотов своими руками
Простейший регулятор оборотов можно изготовить самостоятельно. Для этого потребуются:
- Симистор или мощный транзистор
- Потенциометр
- Резисторы и конденсаторы
- Печатная плата
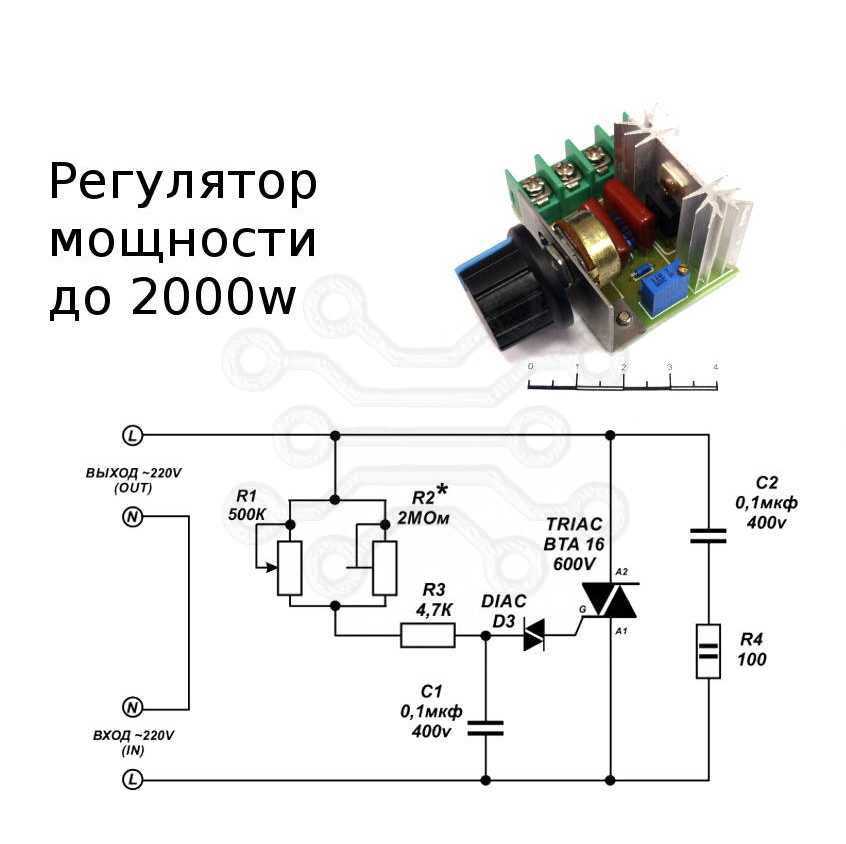
Схема простого симисторного регулятора приведена ниже:
«` «`Данная схема позволяет регулировать обороты двигателя мощностью до 1 кВт. Для более мощных двигателей потребуется использовать радиатор для симистора.
Преимущества использования регуляторов оборотов
Применение регуляторов оборотов электродвигателей дает ряд важных преимуществ:
- Экономия электроэнергии за счет оптимизации режимов работы
- Увеличение срока службы двигателя благодаря плавному пуску
- Расширение функциональных возможностей оборудования
- Повышение точности и качества технологических процессов
- Снижение уровня шума и вибраций
Поэтому использование регуляторов оборотов позволяет повысить эффективность работы электроприводов в различных отраслях промышленности и быту.

Особенности регулировки оборотов асинхронных двигателей
Регулировка оборотов асинхронных двигателей имеет свою специфику. Основные способы регулирования скорости асинхронных двигателей:
- Частотное регулирование — изменение частоты питающего напряжения
- Изменение числа пар полюсов статора
- Изменение напряжения, подводимого к статору
- Введение добавочного сопротивления в цепь ротора (для двигателей с фазным ротором)
Наиболее эффективным является частотное регулирование с помощью преобразователей частоты. Оно позволяет плавно изменять скорость в широком диапазоне.
Применение микроконтроллеров в регуляторах оборотов
Современные регуляторы оборотов часто строятся на базе микроконтроллеров. Это дает ряд преимуществ:
- Точное цифровое управление
- Реализация сложных алгоритмов регулирования
- Возможность программирования различных режимов работы
- Диагностика и защита двигателя
- Интеграция в системы автоматизации
Микроконтроллерное управление позволяет создавать интеллектуальные системы управления электроприводами с широкими возможностями.
Выбор мощности регулятора оборотов
При выборе регулятора оборотов важно правильно определить его мощность. Мощность регулятора должна быть больше мощности двигателя:
Pрег = 1,2-1,5 * Pдвиг
Где Pрег — мощность регулятора, Pдвиг — мощность двигателя.
Запас по мощности нужен для надежной работы регулятора при пусковых токах и перегрузках. Также следует учитывать режим работы — длительный или кратковременный.
изменение скорости вращения и схемы на тиристорах
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
- Однофазные.

- Трехфазные.
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору. Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.

Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп).
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов
определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Он приводит к массовому межвитковому замыканию.
Железняк или сердечник ротора напрессовывается непосредственно на вал. Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность.
Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.

- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.

- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.![]()
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
выполнение преобразователя своими руками, как правильно выбрать схему на 12В
При использовании электродвигателя в различных устройствах и инструментах неизменно возникает необходимость регулировки скорости вращения вала.
Самостоятельно сделать регулятор оборотов электродвигателя не составит труда. Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Использование частотных преобразователей
Для регулировки оборотов электрического двигателя, работающего от сети с напряжением в 220 и 380 Вольт, могут использоваться частотные преобразователи. Высокотехнологичные электронные устройства позволяют благодаря изменению частоты и амплитуды сигнала плавно регулировать частоту вращения электродвигателя.
В основе таких преобразователей лежат мощные полупроводниковые транзисторы с широкоимпульсными модуляторами.

Преобразователи с помощью соответствующего блока управления на микроконтроллере позволяют плавно изменять показатель оборотов двигателя.
Высокотехнологичные преобразователи частоты используются в сложных и нагруженных механизмах. Современные частотные регуляторы имеют сразу несколько степеней защиты, в том числе по нагрузке, показателю тока напряжения и другим характеристикам. Отдельные модели питаются от электросети с однофазным напряжением в 220 Вольт и могут переделывать напряжение в трехфазные 380 Вольт. Использование таких преобразователей позволяет в домашних условиях использовать асинхронные электрические двигатели без применения сложных схем подключения.
Применение электронных регуляторов
Использование мощных асинхронных двигателей невозможно без применения соответствующих регуляторов оборотов. Такие преобразователи используются для следующих целей:
Такие преобразователи используются для следующих целей:
- Ступенчатый разгон и возможность понижения оборотов двигателя при уменьшении нагрузки позволяет уменьшить потребление электроэнергии. Использование частотных преобразователей с мощными асинхронными двигателями позволяет вдвое сократить расходы на электроэнергию.
- Защита электронных механизмов. Преобразователи частоты позволяют контролировать показатели давления, температуры и ряд других параметров. При использовании двигателя в качестве привода насоса в емкости, в которую закачивается жидкость или воздух, может быть установлен датчик давления, отвечающий за управление механизмом и предотвращающий его выход из строя.
- Обеспечение плавного запуска. При запуске электродвигателя, когда мотор сразу начинает работать на максимальных оборотах, на привод приходится повышенная нагрузка. Использование регулятора оборотов обеспечивает плавность запуска, что гарантирует максимально возможную долговечность работы привода и отсутствие его серьезных поломок.

- Сокращаются расходы на техническое обслуживание насосов и самих силовых агрегатов. Наличие регуляторов оборотов снижает риск поломок отдельных механизмов и всего привода.
Используемая частотными преобразователями схема работы аналогична у большинства бытовых приборов. Похожие устройства также используются в сварочных аппаратах, ИБП, питании ПК и ноутбуков, стабилизаторах напряжения, блоках розжига ламп, а также в мониторах и жидкокристаллических телевизорах.
Несмотря на кажущуюся сложность схемы, сделать регулятор оборотов электродвигателя 220 В будет достаточно просто.
Принцип работы устройства
Принцип работы и конструкция регулятора оборотов двигателя отличается простотой, поэтому, изучив технические моменты, вполне по силам выполнить их самостоятельно. Конструктивно выделяют несколько основных компонентов, из которых состоят регуляторы вращения:
- Электрический двигатель.

- Блок преобразователя и микроконтроллерная схема управления.
- Механизмы и приводы.
Отличием асинхронных двигателей от стандартных приводов является вращение ротора с максимальными показателями мощности при подаче напряжения на обмотку трансформатора. На начальном этапе показатели потребляемого тока и мощность у двигателя возрастает до максимума, что приводит к существенной нагрузке на привод и его быстрому выходу из строя.
При запуске двигателя на максимальных оборотах выделяется большое количество тепла, что приводит к перегреву привода, обмотки и других элементов привода. Благодаря использованию частотного преобразователя имеется возможность плавно разгонять двигатель, что предупреждает перегрев и другие проблемы с агрегатом. Электромотор может при использовании частотного преобразователя запускаться на частоте оборотов 1000 в минуту, а в последующем обеспечивается плавный разгон, когда каждые 10 секунд прибавляется 100−200 оборотов двигателя.
Изготовление самодельных реле
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:
- Питание от сети направляется на конденсатор.
- Используемый конденсатор полностью заряжается.
- Нагрузка передается на резистор и нижний кабель.
- Электрод тиристора, соединенный с положительным контактом на конденсаторе, получает нагрузку.

- Передаётся заряд напряжения.
- Происходит открытие второго полупроводника.
- Тиристор пропускает полученную с конденсатора нагрузку.
- Конденсатор полностью разряжается, после чего повторяется полупериод.
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Для обеспечения качественной регулировки в схему включаются переменные резисторы, которые изменяют амплитуду входящего сигнала, обеспечивая плавное или ступенчатое изменение числа оборотов.
Схема на ШИМ-транзисторе
Регулировать скорость вращения вала у маломощных электродвигателей можно при помощи шин-транзистора и последовательного соединения резисторов в питании. Этот вариант отличается простотой реализации, однако имеет низкий КПД и не позволяет плавно изменять скорость вращения двигателя. Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Принцип работы регулятора на транзисторе:
- Используемые сегодня шин-транзисторы имеют генератор пилообразного напряжения частотой в 150 Герц.
- Операционные усилители используются в роли компаратора.
- Изменение скорости вращения осуществляется за счёт наличия переменного резистора, управляющего длительностью импульсов.

Транзисторы имеют ровную постоянную амплитуду импульсов, идентичную амплитуде напряжения питания. Это позволяет выполнять регулировку оборотов двигателя 220 В и поддерживать работу агрегата даже при подаче минимального напряжения на обмотку трансформатора.
Благодаря возможности подключения микроконтроллера к ШИМ-транзистору обеспечивается возможность автоматической настройки и регулировки работы электропривода. Такие схемы исполнения преобразователей могут иметь дополнительные компоненты, которые расширяют функциональные возможности привода, обеспечивая работу в полностью автоматическом режиме.
Внедрение автоматических систем управления
Наличие в регуляторах и частотных преобразователях микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может работать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет показатели частоты вращения агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют отличающееся число выходов и входов. К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
В продаже можно найти различные типы микроконтроллеров, которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
Сегодня в продаже имеются различные преобразователи и регуляторы электродвигателя. Впрочем, при наличии даже минимальных навыков работы с радиодеталями и умении читать схемы можно выполнить такое простейшее устройство, которое будет плавно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что позволит плавно изменять обороты, а наличие микроконтроллерного управления полностью автоматизирует использование электрических двигателей.
нужна ли функция и зачем, как работает, с обратной связью, внутренний и внешний, на симисторе и тиристоре, без потери мощности
Углошлифовальная машина Bosch GWS 9-125 S с регулировкой оборотов. Фото ВсеИнструменты.ру
Необходимость выполнения одним видом электроинструмента работ, требующих изменения установленных основных характеристик, приводит к оснащению его дополнительными устройствами. Так, например, болгарка с регулятором оборотов значительно повышает свои функциональные возможности. Более подробную информацию об особенностях эксплуатации УШМ с регулятором оборотов найдете в данном разделе.
Что из себя представляет регулировка скорости вращения, как работает, нужна ли и зачем
В простейшем варианте частоту вращения можно менять с помощью устройства регулировки мощности, в основе которого заложен принцип переменного сопротивления. То есть, по большому счету это обыкновенный реостат. Многие пользователи используют его на бытовых болгарках при проведении полировальных, шлифовальных работ с мягкими материалами, где на низких оборотах можно добиться качественного результата.
То есть, по большому счету это обыкновенный реостат. Многие пользователи используют его на бытовых болгарках при проведении полировальных, шлифовальных работ с мягкими материалами, где на низких оборотах можно добиться качественного результата.
Типовая электрическая схема регулятора оборотов. Источник фото здесь
Однако, применение такого устройства увеличивает риск перегрева болгарки, так как возникают перегрузки на пониженных оборотах. Целесообразность оснащения бытовых болгарок регулятором мощности по этой причине вызывает большие сомнения.
Профессиональные, мощные болгарки, комплектуются более сложным техническим устройством для регулировки оборотов, в основе которого заложена электронная схема. Наличие функции поддержки частоты вращения при изменении нагрузки является его отличительной чертой. Цены на такие болгарки намного выше, чем на обычные бытовые.
Полезное видео
С обратной связью
В систему поддержания оборотов болгарок профессионального типа при регулировании входит датчик, считывающий частоту вращения. Входящий в конструкцию датчика магнит подает сигнал на электронное регулирующее устройство, в котором сообщаются данные о величине частоты вращения. Электронный блок реагирует соответствующим образом, повышая силу тока в обмотках электропривода при увеличении нагрузки (уменьшении оборотов). Такая обратная связь таходатчика и электронного блока происходит непрерывно и поддерживает стабильную частоту вращения на разных режимах работы УШМ.
Устройство, электросхема болгарки с регулятором скорости вращения
Заводской регулятор оборотов находится внутри корпуса болгарки и встраивается в электрическую схему следующим образом:
Схема подключения регулятора. Источник здесь
Источник здесь
Схема подключения достаточно проста: красный провод соединяется с одним из контактов выключателя, синий провод через второй контакт пускового устройства подключается к одной из двух обмоток статора, а черный провод непосредственно замыкается на другой обмотке.
При подключении регулятора, изготовленного своими руками или готового, приобретенного в магазине к болгарке, где он не предусмотрен производителем, далеко не всегда возможно уместить его внутри корпуса. Практика показывает примеры выполнения регулятора отдельным блоком в разрыв сетевого кабеля. Пользователи выполняют его в виде мобильного универсального устройства, который применим для других видов электроинструмента (дрель, перфоратор).
Другие функции: плавный пуск и не только
УШМ (болгарка) MAKITA 9565CVK с плавным пуском и регулировкой оборотов. Фото 220Вольт
Кроме устройства регулировки оборотов и их электронной стабилизации, которые повышают спектр выполняемых работ, болгарка может оснащаться другими полезными опциями.
- Устройство плавного пуска позволяет уменьшить дополнительные усилия со стороны пользователя, так как динамические нагрузки, возникающие от резкого набора оборотов шпинделя, сильно этому способствуют. Особенно важна установка плавного пуска для мощных болгарок, обладающих большой инерционной массой. Повышение комфортности при работе, снижение риска получить травму, повышение надежности работы узлов и деталей обеспечивается данной опцией.
- Механизм автоматической балансировки снижает вибрацию и биение, которая возникает из-за неравномерного износа рабочего инструмента.
- Защита от заклинивания, которая отключает подачу тока к обмоткам болгарки во время непредвиденной принудительной остановки электропривода. Предотвращает перегрев мотора и выход его из строя.
- С целью снижения травматизма, например, при внезапном отключении электроэнергии, затем таком же неожиданном включении, устанавливается защита от повторного запуска.
 Болгарка после отключения снова войдет в рабочий режим только после нажатия пользователем на фиксатор защиты.
Болгарка после отключения снова войдет в рабочий режим только после нажатия пользователем на фиксатор защиты. - Если характер работ не позволяет долго дожидаться остановки вращающегося шпинделя, то дополнительная опция торможения поможет остановить его максимально быстро.
- Проблемы, возникающие при замене рабочего инструмента, даже при использовании специального ключа, решаются применением специальной быстрозажимной гайки. Она позволяет сменить оснастку за максимально короткое время.
Достоинства универсальных УШМ
УШМ (болгарка) METABO WEV 10-125 Quick 600388000 (в коробке). Фото 220Вольт
Не всегда обычной болгаркой без дополнительных опций удается решить задачу по обработке некоторых видов материалов, рабочий инструмент не приспособлен для эффективной работы на оборотах, которые выдает болгарка без регулятора скорости. Особенно остро проблема выбора нужных режимов стоит перед пользователями, занимающимися шлифовкой, зачисткой, полировкой различных материалов. Для выполнения работ иногда приходится искать другой инструмент с подходящими характеристиками.
Для выполнения работ иногда приходится искать другой инструмент с подходящими характеристиками.
Универсальность УШМ с регулировкой числа оборотов как раз состоит в возможности задавать самостоятельно скорость вращения, например, кордщеток при зачистке. При выполнении шлифовальных операций увеличивается пятно контакта между рабочим инструментом и обрабатываемой поверхностью, что требует применения болгарок повышенной мощности. Такие болгарки с установленными на них дополнительными опциями выполняют практически любой вид работ с различными материалами.
Критерии выбора УШМ с электронным регулятором частоты вращения
Болгарка с электронным регулятором оборотов далеко не дешевый вариант приобретения. Следует четко представлять объем работ, при выполнении которых понадобится изменение скорости вращения рабочего инструмента. Убедившись в обоснованности покупки болгарки с такой опцией, подбираются технические характеристики УШМ в сочетании с возможностями электронного блока регулирования влиять на подбор режима работы. Подробную информацию о критериях выбора можно найти по ссылке «Выбираем болгарку с регулировкой оборотов».
Подробную информацию о критериях выбора можно найти по ссылке «Выбираем болгарку с регулировкой оборотов».
Сделать своими руками внешний регулятор без потери мощности
Пользователи болгарок, на которых не установлен регулятор оборотов, сталкиваются с работами, качество которых можно улучшить обработкой на меньших, чем предусмотрено техническими данными частотах вращения. Расширить функционал болгарки можно установкой этой опции самостоятельно, своими руками.
В зависимости от характера выполняемых работ можно установить более простой регулятор мощности или сложный электронный прибор с обратной связью, которая обеспечит поддержку выбранной величины оборотов без потери мощности. Информацию о способах установки можно найти в статье по ссылке «Регулятор оборотов болгарки своими руками». В случае возникновения неисправностей в механизме следует ознакомиться с информацией, представленной в статье «Ремонт оборотов болгарок своими руками».
На симисторе ВТА-16-200 и тиристоре
Основными элементами регуляторов мощности являются полупроводниковые приборы – симисторы и тиристоры. Их легко купить в специализированных магазинах, также как и другие элементы, входящие в схему – резисторы и конденсаторы. Пользователь, имеющий навыки изготовления электронных плат, может сделать регулятор своими руками. Вариант покупки готового регулятора также популярен у желающих установить его на болгарку.
Их легко купить в специализированных магазинах, также как и другие элементы, входящие в схему – резисторы и конденсаторы. Пользователь, имеющий навыки изготовления электронных плат, может сделать регулятор своими руками. Вариант покупки готового регулятора также популярен у желающих установить его на болгарку.
Схема регулятора на микросхеме U2010B. Источник фото здесь
Некоторые микросхемы, выступающие в качестве основного компонента электронного блока регулировки оборотов, работая совместно с датчиком, считывающим величину оборотов, обеспечивают поддержание нужных оборотов без потери мощности. Такую схему выполнить своими руками без знаний электроники достаточно сложно. Однако существуют микросхемы, например, U2010B, где для работы наличие таходатчика не требуется. Такое устройство можно пробрести в магазине и вставить в электрическую схему болгарки не представит большого труда.
Где купить кнопку регулировки двигателя
Приобрести механизм регулировки оборотов для установки или замены возможно у сотрудников компании, собранные в отдельном разделе нашего сайта. Кроме этого, посетителей сайта могут заинтересовать предприятия, предлагающие широкий выбор электроинструмента с регулировкой оборотов. Универсальные устройства реализуются специалистами компаний, которые собраны в разделе «Где купить УШМ с регулировкой оборотов».
Кроме этого, посетителей сайта могут заинтересовать предприятия, предлагающие широкий выбор электроинструмента с регулировкой оборотов. Универсальные устройства реализуются специалистами компаний, которые собраны в разделе «Где купить УШМ с регулировкой оборотов».
Электродвигатель крутящего момента с лучшим соотношением цены и качества с регулятором скорости — Отличные предложения по крутящему моменту электродвигателя с регулятором скорости от глобальных электродвигателей крутящего момента с регулятором скорости
Отличные новости !!! Вы попали в нужное место для моментного электродвигателя с регулятором скорости. К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях.Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене.Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, поскольку этот электродвигатель с максимальным крутящим моментом и регулятором скорости скоро станет одним из самых востребованных бестселлеров. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели на AliExpress свой крутящий электродвигатель с регулятором скорости. Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не уверены в крутящем моменте электродвигателя с регулятором скорости и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов. Мы поможем вам разобраться, стоит ли доплачивать за высококачественную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь. И, если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. , а также ожидаемую экономию.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца. Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг, и предыдущие клиенты часто оставляют комментарии, описывающие свой опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз.Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца. Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг, и предыдущие клиенты часто оставляют комментарии, описывающие свой опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз.Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет. Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, вы сможете приобрести электродвигатель с крутящим моментом и регулятором скорости по самой выгодной цене.
Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, вы сможете приобрести электродвигатель с крутящим моментом и регулятором скорости по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы. На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
Методы управления скоростью различных типов двигателей с регулировкой скорости
Казуя ШИРАХАТА
Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулировкой скорости. Наши пакеты двигателей с регулировкой скорости включают двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы продукции для двигателей с регулировкой скорости.«Блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсаторным приводом, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Блок инвертора», который объединяет трехфазный асинхронный двигатель с небольшой инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
Существует три группы продукции для двигателей с регулировкой скорости.«Блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсаторным приводом, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Блок инвертора», который объединяет трехфазный асинхронный двигатель с небольшой инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении, от домашнего оборудования до станков на промышленных предприятиях.Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Эти двигатели имеют самые разные функции и характеристики. Если сосредоточить внимание на сегменте регулирования скорости на рынке двигателей, серводвигатели и шаговые двигатели управляют своей скоростью с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и / или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и особенности следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Электродвигатель и мотор-редукторы с регулятором скорости переменного тока
- Бесщеточные двигатели постоянного тока и мотор-редукторы
- Инверторный блок
2. Методы регулирования скорости различных двигателей с регулировкой скорости
Метод управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис.1 Классификация двигателей с регулировкой скорости
2.1. Двигатели с регулировкой скорости переменного тока
2.1.1. Конструкция Motor
Как показано на рис. 2, конструкция однофазного и трехфазного асинхронных двигателей включает статор, на котором намотана первичная обмотка, и цельный алюминиевый ротор в форме корзины, отлитый под давлением. Ротор недорогой, потому что конструкция проста и не использует магнит.
Ротор недорогой, потому что конструкция проста и не использует магнит.
Рис. 2 Конструкция асинхронного двигателя
Когда необходимо контролировать скорость этого двигателя, для определения скорости используется тахогенератор, который присоединяется к двигателю, как показано на рис.3. Тахогенератор состоит из магнита, подключенного непосредственно к валу двигателя, и обмотки статора, которая определяет магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис.3 Система электродвигателя с регулировкой скорости переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя может быть выражена выражением (1). Когда напряжение, прикладываемое к двигателю, увеличивается и уменьшается, скольжение и изменяется, а затем изменяется частота вращения N.
Когда напряжение, прикладываемое к двигателю, увеличивается и уменьшается, скольжение и изменяется, а затем изменяется частота вращения N.
N = 120 · f · (1- s ) / P · · · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, показанного на рис. 4, на кривой «Скорость вращения — крутящий момент» существует стабильный диапазон и нестабильный диапазон.Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление разомкнутым контуром) ограничивается регулированием скорости в узком диапазоне, например N1 ~ N3 на рис. 5. Чтобы обеспечить надежную работу даже в вышеупомянутый нестабильный диапазон, необходимо определить скорость вращения двигателя и использовать механизм регулирования напряжения (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
Рис. 4 Частота вращения — крутящий момент асинхронных двигателей
Фиг.5 Простое управление напряжением
Доступные методы управления напряжением включают управление трансформатором или управление фазой. На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так-то просто сделать с двигателем, регулирующим скорость переменного тока. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время включения / выключения каждого полупериода переменного напряжения (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжение, как показано на рис.7 и 8. Регулирование скорости достигается методом фазового регулирования путем управления среднеквадратичным значением. значение переменного напряжения.
Рис.6 Изменение напряжения трансформатором
Рис.7 Изменение напряжения с помощью фазового управления
Рис.8 Цепь управления симистором
Этот метод управления скоростью переменного тока может обеспечить устойчивое управление скоростью за счет регулирования фазы с обратной связью даже в нестабильном диапазоне.
На рис. 9 показана конфигурация системы управления скоростью для электродвигателя переменного тока в виде блок-схемы.
Рис. 9 Блок-схема системы электродвигателя с регулировкой скорости переменного тока
Рис.10 Форма сигнала для каждого блока
На рис. 10 показаны формы сигналов каждого блока. Установленное значение d скорости и обнаруженное напряжение e скорости, генерируемое тахогенератором, сравниваются в блоке усилителя сравнения. Затем определяется уровень сигнала напряжения , .
Затем определяется уровень сигнала напряжения , .
Сигнал напряжения а, низкий, когда обнаруженное значение скорости до заданного значения скорости увеличивается, и выше, когда заданное значение скорости уменьшается. Поскольку триггерный сигнал выводится в точке, где треугольная волна b, пересекается с сигналом a, напряжения, определяется синхронизация (фазовый угол), когда симистор включен, с уровнем сигнала a напряжения. Когда это время является медленным, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается.Пониженная скорость вращения возвращается снова, и управление повторяется, так что разница между определенным значением скорости и установленным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид упомянутого выше регулятора скорости. На рис. 11 рабочая точка двигателя образует петлю Q-R-S-T-Q с центром на O, и скорость вращения поддерживается между N1 и N2. Этот цикл максимально сокращен за счет увеличения точности определения скорости.
Этот цикл максимально сокращен за счет увеличения точности определения скорости.
Фиг.11 Работа регулятора скорости
Двигатель с регулировкой скорости переменного тока имеет следующие особенности при использовании этого регулирования фазы с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть настроена просто, поскольку в схеме сглаживания нет необходимости, что позволяет получить компактную конструкцию по низкой цене.
2) Таким же образом возможна долговечная конструкция, поскольку нет необходимости в большом алюминиевом электролитическом конденсаторе.
3) Переключение выполняется только один раз в течение каждого полупериода промышленного источника переменного тока, что снижает уровень генерируемого шума.
2.1.3. Характеристики
Двигатели с регулировкой скорости вращения электродвигателя переменного тока обычно имеют характеристики «Скорость вращения — крутящий момент», показанные на рис. 12.
12.
Рис.12 Частота вращения и крутящего момента
«Строка безопасной эксплуатации» приведена на рис. 12. «Строка безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный регулятор скорости постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, катушка соединена звездой (Y-разводкой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагничены в многополюсной конфигурации, как показано на Рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов при каждом повороте ротор.
Рис.14 Конструкция бесщеточного двигателя постоянного тока
2. 2.2. Принцип управления скоростью
2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики вращательной скорости-момента бесщеточного двигателя постоянного тока показывают отрицательную наклонную характеристику, когда его скорость не контролируется, что аналогично таковой у щеточного двигателя постоянного тока.
Рис.15 Характеристики скорости вращения бесщеточного двигателя постоянного тока
Когда нагрузка не приложена и входное напряжение установлено на V2 на Рисунке 15, рабочая точка двигателя становится P, а скорость вращения равна N1.Когда прикладывается крутящий момент T1 нагрузки, рабочая точка смещается на Q, а скорость вращения уменьшается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизму управления скоростью нужно будет только изменять входное напряжение всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Этот контроль напряжения реализуется инвертором в выходной части схемы управления (драйвер).Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как в последовательности, показанной на рис. 16 (b), с использованием шести переключающих элементов (полевых транзисторов или IGBT), показанных на рис. 16 (а).
Рис. 16 (a) Выходная часть схемы управления (драйвер)
Рис.16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на рис. 16 (a), и состояние ВКЛ / ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка становится полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется ИС Холла, и соответствующий переключающий элемент включается или выключается, как показано на Рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включаются, и ток течет из U-фазы в W-фазу. В это время U-фаза возбуждается как полюс N, а фаза W становится S-полюсом, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (Шаг 1 ~ 12).
16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включаются, и ток течет из U-фазы в W-фазу. В это время U-фаза возбуждается как полюс N, а фаза W становится S-полюсом, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (Шаг 1 ~ 12).
На рис. 17 представлена блок-схема конфигурации для управления скоростью бесщеточного двигателя постоянного тока.
Рис.17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от ИС Холла в части определения положения блок-схемы, и двигатель вращается.
Затем сигнал от ИС Холла отправляется на датчик скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом установки скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения.Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами и вторичные потери небольшие.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость реакции.
3) Двигатель можно уменьшить, поскольку он очень эффективен.
4) Колебания скорости при изменении нагрузки незначительны.
Фиг.16 показана типичная последовательность переключения (метод подачи напряжения на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод возбуждения синусоидальной волны, получая информацию о положении ротора с высоким разрешением из программного обеспечения из сигнала IC Холла. Результатом этого метода является метод управления с низким уровнем шума, поскольку ток, протекающий к двигателю, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, прикладываемых при использовании метода возбуждения синусоидальной волны и метода возбуждения 120 градусов
2. 2.3. Характеристики
2.3. Характеристики
Характеристики скорости вращения и крутящего момента бесщеточного двигателя постоянного тока имеют ограниченную область нагрузки в дополнение к области непрерывной работы.
Ограниченная рабочая зона очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме продолжается в течение пяти или более секунд, функция защиты водителя от перегрузки активируется, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок управляет скоростью трехфазного асинхронного двигателя, изменяя частоту f напряжения, подаваемого на двигатель. Инверторный блок изменяет частоту f, изменяя цикл ВКЛ / ВЫКЛ шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120 · f · (1- с ) / P ·· · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл ВКЛ / ВЫКЛ, как показано на рис. 21. Время включения / выключения регулируется таким образом, чтобы среднее напряжение, приложенное к двигателю, приобретало форму синусоиды, путем сравнения треугольной волны, называемой несущим сигналом, с формой волны синусоидального сигнала. Этот метод называется ШИМ-управлением.
21. Время включения / выключения регулируется таким образом, чтобы среднее напряжение, приложенное к двигателю, приобретало форму синусоиды, путем сравнения треугольной волны, называемой несущим сигналом, с формой волны синусоидального сигнала. Этот метод называется ШИМ-управлением.
Рис.19 Дежурный контроль ВКЛ / ВЫКЛ
Метод управления скоростью наших инверторных блоков подразделяется на два типа: управление с обратной связью, которое просто изменяет скорость, и управление с обратной связью, которое уменьшает изменение скорости при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация управления без обратной связи в виде блок-схемы.
Рис.20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и позволяет получить высокие скорости (частоту можно установить до 80 Гц) просто тогда, когда регулирование скорости с изменяющейся нагрузкой не представляет особой важности.
Создаваемый крутящий момент T двигателя показан формулой (2).Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если сделать постоянным V / f, отношение напряжения V к частоте f.
= K ・ I ・ V / f ・ ・ ・ (2)
T : Крутящий момент [Н · м]
V : Напряжение источника питания [В]
I : Ток двигателя [A]
f : Частота [Гц]
K : Постоянная
Однако чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f.Следовательно, чтобы получить постоянный крутящий момент от низкой скорости к высокой скорости, необходимо отрегулировать отношение V / f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рисунке 23.
Рис.21 V / f Control
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис.22 Блок-схема управления по замкнутому контуру
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, с использованием таблицы данных характеристик (рис.25), подготовленный заранее, и регулирует частоту инвертора без необходимости в датчике скорости на двигателе.
Рис.23 Таблица характеристик и данных
Используя эту таблицу характеристик и время t обнаруженной разности фаз, инвертор вычисляет выходную частоту инвертора, которая соответствует команде Nset скорости вращения, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления U / f вычисляет напряжение, приложенное к двигателю, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM. В результате при приложении нагрузки выходная частота инвертора повышается, так что уменьшение скорости вращения может быть компенсировано. (3)
В результате при приложении нагрузки выходная частота инвертора повышается, так что уменьшение скорости вращения может быть компенсировано. (3)
2.3.2. Характеристика с
Характеристики скорости вращения-момента инверторного блока показаны на рис. 26 и 27. Как объяснено в разделе «Двигатель, регулирующий скорость переменного тока», на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет предел для непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис.24 Характеристики скорости вращения и момента для управления без обратной связи
Рис.25 Характеристики скорости вращения и момента для замкнутого контура управления
3. Резюме
Oriental Motor предлагает три группы продуктов (двигатели с регулированием скорости переменного тока, бесщеточные двигатели с регулировкой скорости постоянного тока и инверторные блоки) для использования в широком диапазоне приложений регулирования скорости. Подходящий продукт для регулирования скорости можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, которые требуются для вашего приложения.
Подходящий продукт для регулирования скорости можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, которые требуются для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, наилучшим образом отвечающую различным потребностям наших клиентов.
Список литературы
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998).
(2) Казуо Абэ: «Технология бесшумного привода бесщеточного двигателя», RENGA № 163, стр. 19-25 (2003)
(3) Кодзи Намихана, Масаёши Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA No.159, стр. 23-28 (1999)
| Кадзуя Сирахата Завод Цуруока, Операции ACIX Подразделение схемотехники Секция разработки схем |
Лучшие и важные методы контроля
В период 18 -го и -го века произошла эволюция двигателей постоянного тока. Развитие двигателей постоянного тока значительно расширилось, и они широко применяются во многих отраслях промышленности.В начале 1800-х годов и с усовершенствованиями, сделанными в 1832 году, двигатели постоянного тока были первоначально разработаны британским исследователем Стердженом. Он изобрел начальный коммутаторный двигатель постоянного тока, в котором он также может моделировать механизмы. Но можно задаться вопросом, каковы функциональные возможности двигателя постоянного тока и почему важно знать об управлении скоростью двигателя постоянного тока. Итак, эта статья четко объясняет его работу и различные методы контроля скорости.
Развитие двигателей постоянного тока значительно расширилось, и они широко применяются во многих отраслях промышленности.В начале 1800-х годов и с усовершенствованиями, сделанными в 1832 году, двигатели постоянного тока были первоначально разработаны британским исследователем Стердженом. Он изобрел начальный коммутаторный двигатель постоянного тока, в котором он также может моделировать механизмы. Но можно задаться вопросом, каковы функциональные возможности двигателя постоянного тока и почему важно знать об управлении скоростью двигателя постоянного тока. Итак, эта статья четко объясняет его работу и различные методы контроля скорости.
Что такое двигатель постоянного тока?
Двигатель постоянного тока работает от постоянного тока, преобразуя полученную электрическую энергию в механическую.Это вызывает изменение вращения в самом устройстве, таким образом обеспечивая питание для работы различных приложений в нескольких областях.
Управление скоростью двигателя постоянного тока — одна из наиболее полезных функций двигателя. Контролируя скорость двигателя, вы можете изменять скорость двигателя в соответствии с требованиями и получать необходимую работу.
Контролируя скорость двигателя, вы можете изменять скорость двигателя в соответствии с требованиями и получать необходимую работу.
Механизм контроля скорости применим во многих случаях, например, для управления движением роботизированных транспортных средств, движением двигателей на бумажных фабриках и движением двигателей в лифтах, где используются различные типы двигателей постоянного тока.
Принцип работы двигателя постоянного тока
Простой двигатель постоянного тока работает по принципу: когда токопроводящий проводник помещается в магнитное поле, на него действует механическая сила. В практическом двигателе постоянного тока якорь является проводником по току, а поле создает магнитное поле.
Когда на проводник (якорь) подается ток, он создает собственный магнитный поток. Магнитный поток либо суммируется с магнитным потоком из-за обмоток возбуждения в одном направлении, либо компенсирует магнитный поток, обусловленный обмотками возбуждения.Накопление магнитного потока в одном направлении по сравнению с другим оказывает давление на проводник, и поэтому он начинает вращаться.
Согласно закону электромагнитной индукции Фарадея вращательное действие проводника создает ЭДС. Эта ЭДС, согласно закону Ленца, имеет тенденцию противодействовать причине, то есть подаваемому напряжению. Таким образом, двигатель постоянного тока имеет особую характеристику регулирования своего крутящего момента в случае изменения нагрузки из-за обратной ЭДС.
Почему важно регулировать скорость двигателя постоянного тока?
Контроль скорости в машине показывает влияние на скорость вращения двигателя, где это прямое влияние на функциональность машины и так важно для производительности и результатов работы.Во время сверления каждый материал имеет свою скорость вращения, которая также меняется в зависимости от размера сверла.
В сценарии с насосными установками будет изменение производительности, поэтому конвейерная лента должна быть синхронизирована с функциональной скоростью устройства. Эти факторы прямо или косвенно зависят от скорости двигателя. Из-за этого следует учитывать скорость двигателя постоянного тока и соблюдать различные типы методов управления скоростью.
Управление скоростью двигателя постоянного тока осуществляется либо вручную рабочим, либо с помощью любого инструмента автоматического управления.Похоже, что это контрастирует с ограничением скорости, когда должно быть регулирование скорости, противодействующее естественному изменению скорости из-за изменения нагрузки на вал.
Принцип управления скоростью
Из приведенного выше рисунка уравнение напряжения для простого двигателя постоянного тока:
В = Eb + IaRa
В — подаваемое напряжение, Eb — обратная ЭДС, Ia — якорь ток, Ra — сопротивление якоря.
Мы уже знаем, что
Eb = (PøNZ) / 60A.
P — количество полюсов,
A — постоянное
Z — количество проводников
N — частота вращения двигателя
Подставляя значение Eb в уравнение напряжения, получаем
V = ( (PøNZ) / 60A) + IaRa
Или, V — IaRa = (PøNZ) / 60A
, то есть N = (PZ / 60A) (V — IaRa) / ø
. записывается как:
записывается как:
N = K (V — IaRa) / ø, K — постоянная величина
Это подразумевает три вещи:
- Скорость двигателя прямо пропорциональна напряжению питания.
- Скорость двигателя обратно пропорциональна падению напряжения на якоре.
- Скорость двигателя обратно пропорциональна потоку из-за полевых выводов.
Таким образом, скорость двигателя постоянного тока можно контролировать тремя способами:
- Изменяя напряжение питания.
- Изменяя поток, и изменяя ток через обмотку возбуждения
- Изменяя напряжение якоря и изменяя сопротивление якоря
Различные методы управления скоростью двигателя постоянного тока
Поскольку существует два типа двигателей постоянного тока, здесь мы четко обсудим методы управления скоростью как последовательных, так и параллельных двигателей постоянного тока.
Управление скоростью двигателя постоянного тока серийных типов
Его можно разделить на два типа, а именно:
- Техника управления якорем
- Техника управления полем
Техника управления якорем далее подразделяется на три типа
- Якорь контролируемое сопротивление
- Управление шунтированным якорем
- Напряжение на клеммах якоря
Регулируемое сопротивление якоря
Этот метод наиболее широко используется, когда регулирующее сопротивление последовательно соединено с сопротивлением питания двигателя. Изображение ниже объясняет это.
Изображение ниже объясняет это.
Потери мощности, которые происходят в управляющем сопротивлении двигателя постоянного тока, можно игнорировать, поскольку этот метод регулирования в основном используется в течение длительного периода времени для снижения скорости во время сценариев легкой нагрузки. Это рентабельный метод получения постоянного крутящего момента, который в основном применяется в приводных кранах, поездах и других транспортных средствах.
Управление шунтированным якорем
Здесь реостат будет иметь как последовательное, так и шунтирующее соединение с якорем.Будет изменяться уровень напряжения, подаваемого на якорь, и это зависит от изменения последовательного реостата. Тогда как изменение тока возбуждения происходит за счет смены шунтирующего реостата. Этот метод управления скоростью в двигателе постоянного тока не так дорог из-за значительных потерь мощности в сопротивлениях регулирования скорости. Скорость можно до некоторой степени регулировать, но не выше нормального уровня.
Напряжение на клеммах якоря
Скорость двигателя постоянного тока также может быть достигнута путем подачи питания на двигатель с использованием индивидуального переменного напряжения питания, но этот подход является дорогостоящим и широко не применяется.
Техника с полевым управлением далее подразделяется на два типа:
- Полевой дивертер
- Управление задействованным полем (управление полевым полем)
Техника полевого дивертора
В этом методе используется дивертор. Скорость потока, проходящего через поле, можно уменьшить, шунтировав некоторую часть тока двигателя через последовательное поле. Чем меньше сопротивление дивертора, тем меньше ток возбуждения. Этот метод используется не только для нормального диапазона скоростей, но и для электрических приводов, где скорость увеличивается при уменьшении нагрузки.
Регулировка скорости двигателя постоянного тока с дивертором поляУправление отводным полем
Здесь также, с уменьшением магнитного потока, скорость будет увеличиваться, и это достигается за счет уменьшения количества витков обмотки возбуждения, откуда протекает ток. Здесь убирают количество ответвлений в обмотке возбуждения и этот прием используется в электрических тягах.
Здесь убирают количество ответвлений в обмотке возбуждения и этот прием используется в электрических тягах.
Управление скоростью параллельного двигателя постоянного тока
Его можно разделить на два типа, а именно:
- Метод управления полем
- Метод управления якорем
Метод управления полем шунтирующего двигателя постоянного тока
В этом методе магнитный магнитный поток, создаваемый обмотками возбуждения, варьируется для изменения скорости двигателя.
Поскольку магнитный поток зависит от тока, протекающего через обмотку возбуждения, его можно изменять, изменяя ток через обмотку возбуждения. Это может быть достигнуто путем использования переменного резистора последовательно с резистором обмотки возбуждения.
Первоначально, когда переменный резистор находится в минимальном положении, номинальный ток течет через обмотку возбуждения из-за номинального напряжения питания, и в результате скорость остается нормальной. При постепенном увеличении сопротивления ток через обмотку возбуждения уменьшается.Это, в свою очередь, снижает создаваемый поток. Таким образом, скорость двигателя увеличивается сверх своего нормального значения.
При постепенном увеличении сопротивления ток через обмотку возбуждения уменьшается.Это, в свою очередь, снижает создаваемый поток. Таким образом, скорость двигателя увеличивается сверх своего нормального значения.
Метод управления сопротивлением якоря для шунтирующего двигателя постоянного тока
С помощью этого метода можно управлять скоростью двигателя постоянного тока, управляя сопротивлением якоря, чтобы контролировать падение напряжения на якоре. В этом методе также используется переменный резистор, включенный последовательно с якорем.
Когда переменный резистор достигает минимального значения, сопротивление якоря становится нормальным, и, следовательно, напряжение якоря падает.Когда значение сопротивления постепенно увеличивается, напряжение на якоре снижается. Это, в свою очередь, приводит к снижению скорости двигателя.
С помощью этого метода достигается скорость двигателя ниже его нормального диапазона.
Метод управления напряжением якоря для шунтирующего двигателя постоянного тока (метод Уорда Леонарда)
Метод Уорда Леонарда для схемы управления скоростью двигателя постоянного тока показан следующим образом:
На приведенном выше рисунке M — это главный двигатель, скорость которого равна должен регулироваться, а G соответствует индивидуально возбужденному генератору постоянного тока, который приводится в действие трехфазным двигателем, и он может быть синхронным или асинхронным. Эта комбинация генератора постоянного тока и двигателя переменного тока называется набором M-G.
Эта комбинация генератора постоянного тока и двигателя переменного тока называется набором M-G.
Напряжение генератора изменяется путем изменения тока возбуждения генератора. Этот уровень напряжения, когда он подается на секцию якоря двигателя постоянного тока, а затем M изменяется. Чтобы поддерживать постоянным поток поля двигателя, ток возбуждения двигателя должен поддерживаться постоянным. Когда скорость двигателя регулируется, ток якоря двигателя должен быть таким же, как и номинальный уровень.
Поставляемый ток возбуждения будет другим, поэтому уровень напряжения якоря изменяется от «0» до номинального уровня. Поскольку регулирование скорости соответствует номинальному току и постоянному потоку поля двигателя и магнитному потоку поля до достижения номинальной скорости. И поскольку мощность является продуктом скорости и крутящего момента, она прямо пропорциональна скорости. При этом при увеличении мощности скорость увеличивается.
Оба вышеупомянутых метода не могут обеспечить регулирование скорости в желаемом диапазоне. Более того, метод управления потоком может повлиять на коммутацию, тогда как метод управления якорем включает огромные потери мощности из-за использования резистора, включенного последовательно с якорем. Поэтому часто желателен другой метод — тот, который регулирует напряжение питания для управления скоростью двигателя.
Более того, метод управления потоком может повлиять на коммутацию, тогда как метод управления якорем включает огромные потери мощности из-за использования резистора, включенного последовательно с якорем. Поэтому часто желателен другой метод — тот, который регулирует напряжение питания для управления скоростью двигателя.
Следовательно, с помощью метода Уорда Леонарда регулируемый силовой привод и постоянное значение крутящего момента достигаются от минимального уровня скорости до уровня базовой скорости. Техника регулирования потока поля в основном используется, когда уровень скорости больше, чем базовая скорость.
Здесь, в этой функциональности, ток якоря поддерживается на постоянном уровне при заданном значении, а значение напряжения генератора поддерживается на постоянном уровне. В таком методе обмотка возбуждения получает фиксированное напряжение, а якорь — переменное напряжение.
Один такой метод управления напряжением включает использование механизма распределительного устройства для подачи переменного напряжения на якорь, а другой использует генератор переменного тока с приводом от двигателя для подачи переменного напряжения на якорь (система Уорда-Леонарда) .
Преимущества и недостатки Ward Leonard Metho d:
Преимущества использования метода Ward Leonard для управления скоростью двигателя постоянного тока следующие:
- В обоих направлениях можно управлять скоростью устройства. плавным образом для расширенного диапазона
- Этот метод обладает внутренней тормозной способностью
- Задние реактивные вольт-амперы уравновешиваются посредством привода, а синхронный двигатель с сильным возбуждением действует как привод, поэтому коэффициент мощности будет увеличиваться
- Когда есть импульсная нагрузка, приводным двигателем является асинхронный двигатель с маховиком, который используется для уменьшения мгновенной нагрузки до минимального уровня.
Недостатки метода Уорда Леонарда:
- As, потому что этот метод имеет комплект двигателя и генератора, стоимость более
- Устройство сложное по конструкции и имеет большой вес
- Требуется больше места e для установки
- Требуется регулярное техническое обслуживание и фундамент не рентабельно
- Будут огромные потери, поэтому эффективность системы снизится
- Возникает больше шума
И применение метода Уорда Леонарда плавное управление скоростью в двигателе постоянного тока.Некоторые из примеров — шахтные подъемники, бумажные фабрики, подъемники, прокатные станы и краны.
Помимо этих двух методов, наиболее широко используемым методом является управление скоростью двигателя постоянного тока с помощью ШИМ для управления скоростью двигателя постоянного тока. ШИМ включает в себя приложение импульсов переменной ширины к драйверу двигателя для управления напряжением, подаваемым на двигатель. Этот метод оказался очень эффективным, поскольку потери мощности сведены к минимуму, и он не требует использования какого-либо сложного оборудования.
Метод управления напряжениемНа приведенной выше блок-схеме представлен простой регулятор скорости электродвигателя. Как показано на приведенной выше блок-схеме, микроконтроллер используется для подачи сигналов ШИМ на драйвер двигателя. Драйвер двигателя представляет собой микросхему L293D, которая состоит из H-мостовых схем для управления двигателем.
ШИМ достигается путем изменения импульсов, подаваемых на разрешающий вывод микросхемы драйвера двигателя, для управления приложенным напряжением двигателя.
