Что такое гироскоп и акселерометр в смартфоне. Как работают эти датчики. Чем отличается гироскоп от акселерометра. Где применяются гироскоп и акселерометр в мобильных устройствах. Какие функции выполняют эти датчики.
Что такое гироскоп и акселерометр в смартфоне
Гироскоп и акселерометр — это два важных датчика, которые присутствуют практически во всех современных смартфонах. Они отвечают за определение положения устройства в пространстве и его движения. Хотя эти датчики часто путают, они выполняют разные функции.
Что такое гироскоп
Гироскоп — это датчик, который определяет угловое положение и ориентацию устройства в пространстве. Он измеряет угловую скорость вращения смартфона вокруг трех осей:
- Ось X (крен) — поворот вокруг продольной оси
- Ось Y (тангаж) — поворот вокруг поперечной оси
- Ось Z (рыскание) — поворот вокруг вертикальной оси
Гироскоп позволяет точно определить, как именно повернут смартфон в данный момент. Это дает возможность использовать поворот устройства для управления в играх, просмотра панорамных фото и видео 360°, работы приложений виртуальной реальности.
Что такое акселерометр
Акселерометр — это датчик, который измеряет ускорение устройства по трем осям. Он определяет, с какой скоростью и в каком направлении двигается смартфон. Акселерометр реагирует на следующие типы движения:
- Линейное ускорение при перемещении устройства
- Ускорение свободного падения
- Вибрации и толчки
Благодаря акселерометру смартфон «понимает» свое положение относительно земли и определяет, когда его перевернули или наклонили. Это позволяет автоматически поворачивать экран при смене ориентации устройства.
Чем отличается гироскоп от акселерометра
Хотя гироскоп и акселерометр часто работают вместе, между ними есть важные отличия:
Принцип работы
Гироскоп измеряет угловую скорость вращения, а акселерометр — линейное ускорение. То есть гироскоп определяет повороты устройства, а акселерометр — прямолинейное движение.
Типы измерений
Гироскоп измеряет углы наклона и поворота в градусах. Акселерометр измеряет ускорение в м/с².
Точность определения ориентации
Гироскоп точнее определяет положение устройства в пространстве. Акселерометр дает менее точные данные об ориентации, так как на него влияет сила тяжести.
Чувствительность к движению
Акселерометр более чувствителен к резким движениям и вибрациям. Гироскоп менее подвержен влиянию внешних воздействий.
Где применяются гироскоп и акселерометр в смартфонах
Датчики гироскопа и акселерометра используются во многих функциях современных смартфонов:
Применение гироскопа
- Управление в мобильных играх наклоном устройства
- Просмотр панорамных фото и видео 360°
- Работа приложений виртуальной и дополненной реальности
- Стабилизация видео при съемке
- Навигация внутри помещений
Применение акселерометра
- Автоматический поворот экрана
- Подсчет шагов в фитнес-приложениях
- Определение свободного падения для защиты данных
- Управление жестами встряхивания
- Экономия энергии при положении экраном вниз
Как проверить работу гироскопа и акселерометра
Чтобы убедиться в корректной работе датчиков, можно воспользоваться специальными приложениями для тестирования. Они позволяют увидеть данные с гироскопа и акселерометра в реальном времени.
Для проверки гироскопа достаточно медленно поворачивать смартфон в разных плоскостях и следить за изменением значений углов наклона. Для теста акселерометра нужно двигать устройство по прямой и наблюдать за показаниями линейного ускорения.

Калибровка гироскопа и акселерометра
Иногда датчики могут начать работать некорректно и требуют перекалибровки. Как откалибровать гироскоп и акселерометр в смартфоне:
- Положите смартфон на ровную горизонтальную поверхность экраном вверх
- Запустите приложение для калибровки датчиков
- Следуйте инструкциям программы по поворотам и перемещению устройства
- Дождитесь завершения процесса калибровки
В некоторых смартфонах есть встроенные средства калибровки датчиков в настройках. Также можно попробовать перезагрузить устройство или сбросить его к заводским настройкам.
Нужен ли гироскоп в смартфоне
Гироскоп не является обязательным датчиком и часто отсутствует в бюджетных моделях смартфонов. Нужен ли гироскоп в телефоне? Это зависит от потребностей пользователя:
Когда гироскоп необходим:
- Для игр с управлением наклоном устройства
- Для приложений виртуальной реальности
- Для просмотра панорамных фото и видео
- Для точной навигации
Когда можно обойтись без гироскопа:
- Если вы не используете VR-приложения
- Если не играете в игры с управлением наклоном
- Если вам достаточно базовых функций смартфона
Отсутствие гироскопа можно частично компенсировать работой акселерометра, но некоторые возможности будут недоступны.

Заключение
Гироскоп и акселерометр — важные датчики в современных смартфонах, которые значительно расширяют их функциональность. Хотя эти сенсоры работают по разным принципам, вместе они обеспечивают точное определение положения и движения устройства в пространстве. Это позволяет реализовать множество полезных функций — от автоповорота экрана до работы VR-приложений.
При выборе смартфона стоит обратить внимание на наличие гироскопа, если вы планируете использовать продвинутые возможности устройства. Для базового функционала достаточно акселерометра, который есть в любом современном смартфоне.
Чем отличается гироскоп от акселерометра
Многие из современных мобильных гаджетов — смартфонов и планшетов — оснащены гироскопами и акселерометрами. Что это за аппаратные компоненты?
Что такое гироскоп?
Гироскоп, встраиваемый в мобильный гаджет, это небольшое устройство, способное определять собственный (а значит, и того девайса, на котором оно размещено) угол наклона относительно земной поверхности и передавать соответствующие координаты в то или иное приложение. Например — в игру, установленную на смартфоне либо планшете или иной вид ПО. Использование приложениями данных с гироскопа дает возможность пользователю эффективно управлять интерфейсом девайса или, например, игровыми персонажами.
Гироскопы — это девайсы, которые находят самое широкое применение не только в индустрии мобильных решений, но и в иных сегментах рынка электронных устройств, а также в автомобильной, аэрокосмической промышленности. Принцип их работы вне зависимости от сферы применения одинаковый — они используются для определения положения объекта относительно земной поверхности.
Что такое акселерометр?
Акселерометр в мобильном гаджете — это устройство, позволяющее измерять собственное (а значит, и того девайса, на котором оно размещено) ускорение. Даже если длина «разгона» составляет миллиметры. Как и гироскоп, акселерометр, инсталлированный на смартфоне или планшете, может передавать сведения об ускорении в игру или приложение. При этом соответствующий сигнал призван выполнять, в принципе, ту же функцию, что и в случае с задействованием гироскопа — он помогает программе, работающей на гаджете, определить свое положение относительно земной поверхности.
Вместе с тем у акселерометра есть одно важное преимущество — измерение ускорения позволяет устройству весьма точно вычислять расстояние, на которое оно перемещено в пространстве. Поэтому мобильный гаджет с акселерометром можно использовать, к примеру, как шагомер.
Способность акселерометра измерять ускорение исключительно полезна для работы систем защиты некоторых электронных устройств от последствий падения или неудачной «перепасовки» одним пользователем другому.
Сравнение
Главное отличие гироскопа от акселерометра — в принципах работы данных аппаратных компонентов. Первый вычисляет свой угол наклона относительно земли, второй подсчитывает собственное ускорение — но, опять же, относительно земной поверхности. На практике обе функции могут в ряде случаев заменять друг друга или же удачно дополнять. Поэтому многие мобильные девайсы оснащаются как акселерометром, так и гироскопом.
Вместе с тем у акселерометра есть ряд возможностей, недоступных для гироскопа. В частности — формирование сигналов, позволяющих определить расстояние, пройденное пользователем мобильного устройства.
Определив то, в чем разница между гироскопом и акселерометром, зафиксируем ее ключевые критерии в таблице.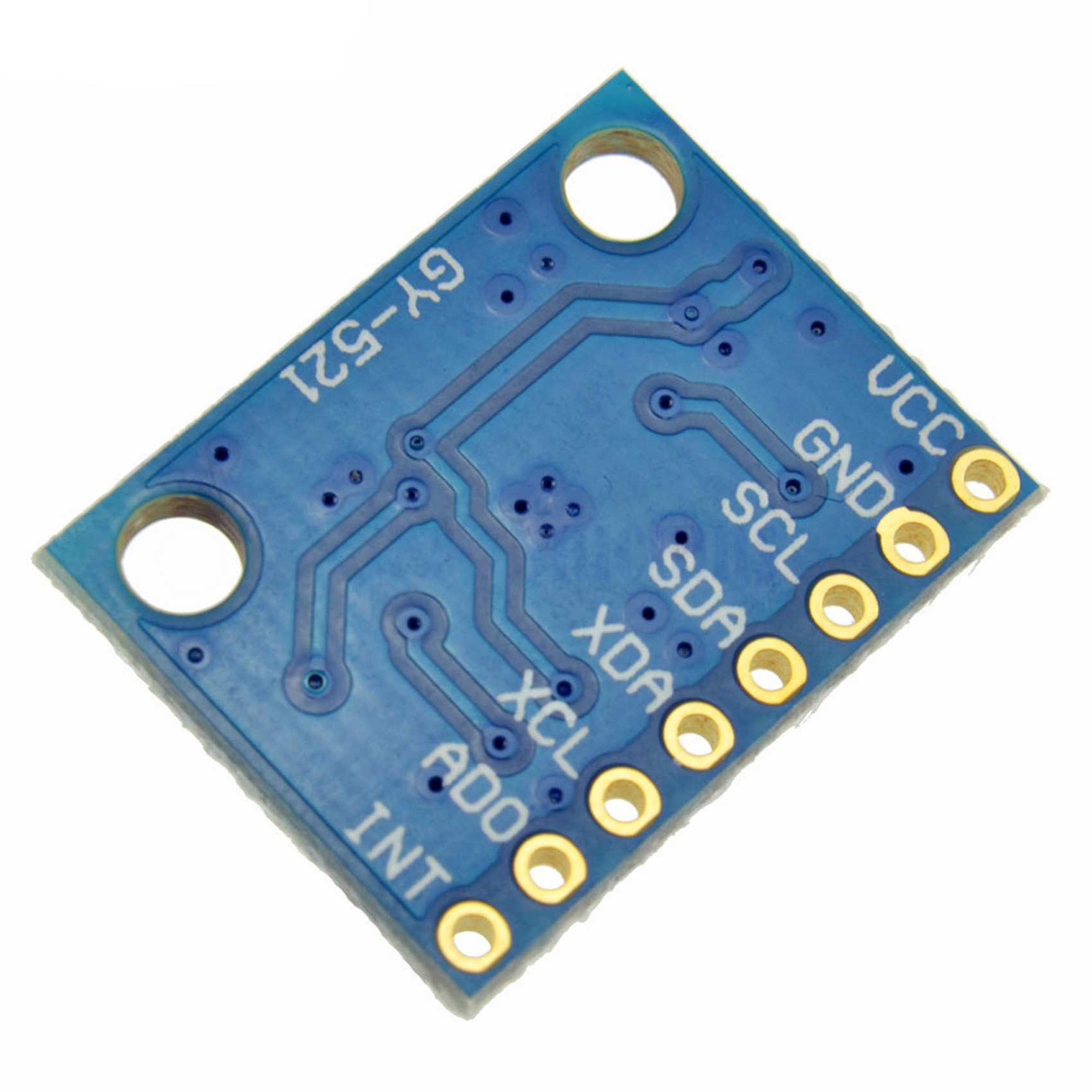
Таблица
| Гироскоп | Акселерометр |
| Что между ними общего? | |
| Оба устройства позволяют определить их положение относительно земли, а также того гаджета, в котором они инсталлированы, и могут задействоваться в этих целях одновременно | |
| В чем разница между ними? | |
| Определяет собственный угол наклона относительно земли | Определяет ускорение относительно земной поверхности |
| Не может использоваться в целях измерения длительности перемещения устройства | Может применяться для измерения длительности перемещения устройства |
что это, в чем разница, главные отличия
Положение в пространстве, направление движения и ускорение — наверное одни из тех факторов, которые попросту нужно знать логической части множества контролирующих устройств.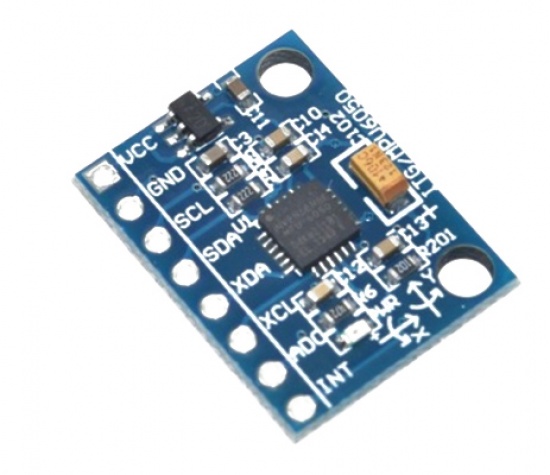 Речь идет не только о специфичной самолетной, вертолетной или морской технике, изменение ориентации которой важно в навигации и пилотировании.
Речь идет не только о специфичной самолетной, вертолетной или морской технике, изменение ориентации которой важно в навигации и пилотировании.
Применяются датчики определяющие перечисленные факторы и в быту. К примеру, в смартфонах, фитнес-браслетах, планшетах, ноутбуках, экранах TV или мониторах. Для первых трех — технология положения используется в нише создания шагомеров или в качестве управляющей функциями аппарата опции. Доступно и позиционирование с участием детектора отображаемых элементов мобильного устройства. Остальные перечисленные, довольствуются определением текущей ориентации выводящего изображение экрана. В случае ее изменения, соответственно будет подстроен и формат — книжный (широкий) или альбомный (узкий) тип подачи картинки на текущий дисплей.
Есть еще одна ниша в быту, где властвуют аппараты, определяющие ускорение и положение в пространстве. Речь идет об игровых контроллерах, которые, на современных приставках, осуществляют действие не только от нажатия на кнопку, но и по вибрации джойстика или его наклона.
Встречаются акселерометры и в автомобильных регистраторах. Они включают запись событий в моменты резких остановок, экстренного торможения или изменения положения кузова. Последнее актуально для тех случаев, когда машина вылетает с дороги, обо что-то ударяется, а также переворачивается на бок или крышу.
В любом варианте использования, для аппаратов, определяющих положение, применяют два вида сенсоров — акселерометр или гироскоп. Каждый из которых, обладает своими плюсами и минусами. В настоящее время, сама механика каждого из перечисленных датчиков, упакована внутрь небольших микросхем. Хотя, в своей основе, — принцип их действия остается неизменным еще с XIX века. Именно тогда, давно известные физические свойства, относящиеся к механизмам, определяющим положение в пространстве, получили свое официальное наименование.
Редко, но встречаются случаи, участия обоих типов сенсоров — гироскопа и акселерометра в схеме одного устройства. Чаще используется какой-либо один из них, так как он, почти в полном объеме, выполняет функции другого. Хотя есть и небольшие различия, делающие применение аналогичного по возможностям датчика, но работающего на других физических основах, — в некоторых случаях невозможным.
Гироскоп
Изобретение устройства приписывается Иоанну Бонненбергеру, как первому человеку, описавшему механический гироскоп. Но, еще задолго до него, люди обращали внимание на поведение обычного волчка (юлы) — вращаясь, он всегда сохраняет одно положение, вне зависимости от действия сторонних сил. То есть, единовременный наклон плоскости, на которой находится крутящийся маховик не оказывает на его положение никакого влияния. В основе работы механического гироскопа заложен тот же принцип. Ротор, закреплен в корпусе на две подвижные рамы, позволяющие изменять его положение в пространстве по всем осям ординат. Вращаясь, он будет сохранять свой изначальный наклон, вне зависимости от угла смещения основы, на которой закреплена конструкция. Обусловлен этот фактор действием кориолисовой силы.
Чем выше оборот маховика и его вес, тем более устойчив гироскоп к внешним факторам изменения положения. С другой стороны, тем больше его размер. Современные устройства настоящего типа миниатюрны и представляют собой относительно небольшую микросхему с гранями менее сантиметра длинной. Наклон в таких приборах выявляется уже не положением маховика в подвижной раме, а местонахождением миниатюрного вибрирующего грузика по трем осям. Описанная система более надежна, чем ее классический вариант. Кроме того, результирующий чувствительный прибор очень мал. Впервые, для рынка мобильных устройств, гироскоп в составе МЭМС микросхемы стал доступен в смартфоне Apple iPhone 4s.
С другой стороны, тем больше его размер. Современные устройства настоящего типа миниатюрны и представляют собой относительно небольшую микросхему с гранями менее сантиметра длинной. Наклон в таких приборах выявляется уже не положением маховика в подвижной раме, а местонахождением миниатюрного вибрирующего грузика по трем осям. Описанная система более надежна, чем ее классический вариант. Кроме того, результирующий чувствительный прибор очень мал. Впервые, для рынка мобильных устройств, гироскоп в составе МЭМС микросхемы стал доступен в смартфоне Apple iPhone 4s.
Акселерометр
Изначальным датчиком, определяющим положение в пространстве для устройств, был акселерометр, еще называемый G-сенсором. В состоянии покоя, он позволяет приблизительно, вычислить угол наклона детектора относительно вектора силы тяготения земли. Но основная функция устройства — определение ускорения движения.
В своей конструкции, акселерометр представлен грузом, закрепленным на подвижном основании и установленным вдоль пути возможного перемещения. При ускорении маятник будет смещаться на расстояние, зависящее от силы воздействия.
При ускорении маятник будет смещаться на расстояние, зависящее от силы воздействия.
Практическое применение прибора с одним определяемым вектором направления — бессмысленно. Обычно используют датчики акселерометров с тремя линиями чувствительности воздействия, упакованные, как, и в случае гироскопов внутрь МЭСМ микросхем.
Рассматривая детектор со стороны внутренних электрических принципов работы, можно заметить, что чаще встречаются сенсоры ускорения емкостного или пьезоэлектрического действия.
Недостатки и преимущества
Гироскоп и акселерометр похожи по возможностям, тем не менее, отличаются определяемой характеристикой. В первом случае — положение, для второго — направление воздействия силы. Поэтому функциональность их востребована немного в разных жизненных областях. Рассмотрим их возможности, в разрезе плюсов и минусов.
Акселерометр
Плюсы:
- Быстрое определение изменения действия вектора силы. Хорош в качестве датчика ускорения.
- Проще конструктивно и дешевле гироскопа.
Минусы:
- Положение относительно земли определяет неточно. Сильно зависит от воздействия гравитации. Дает показания, требующие введения коэффициента поправки в зависимости от текущего места и воздействия внешних факторов.
- Чувствителен к сторонней вибрации.
- Не может производить измерение угла наклона при ускорении. Требует для получения данных момент покоя.
Наиболее часто используется в обыденной жизни для автомобильных регистраторов, систем безопасности хрупкого оборудования, мобильных телефонов и планшетов, игровых контроллеров, фитнес-браслетов. Популярен за счет низкой цены, малого размера и надежности.
Гироскоп
Плюсы:
- Точен в определении углов наклона по всем трем осям XYZ, или как их еще называют — крена, тангажа и рысканья.
- Нулевое направление, от которого и выполняются измерения, не зависит от притяжения земли и может быть любым.
- Практически не подвержен влиянию внешних факторов или сторонних сил.
 К примеру, работа устройства полностью, или по большей части, игнорирует вектор и состояние окружающего магнитного поля.
К примеру, работа устройства полностью, или по большей части, игнорирует вектор и состояние окружающего магнитного поля.
Минусы:
- Не может определять ускорение.
- Сложность конструкции увеличивает конечную стоимость устройства.
- Время определения смены положения выше, чем в случае акселерометра.
Для гироскопов характерной нишей применения становятся системы равновесия транспортных средств, включая водные, воздушные и космические. Ими же оснащают качественные мобильные аппараты и всю электронику контролирующую изначальное положение в пространстве механизмов или производственных линий.
Как определить установленный тип датчика для мобильного устройства
В смартфоне или планшете определить, какой именно сенсор установлен — гироскоп или акселерометр очень просто, даже без использования специфичных программ. Достаточно включить «поворот экрана» и потрясти устройство вверх-вниз, влево-вправо, не переворачивая его в действительности. Если экран сменит ориентацию, значит детектором выступает акселерометр. Если нет — гироскоп. Все дело именно в отличии определяемых сил. Если ускорение без покоя в случае акселерометра – процессор устройства «решит», что произошел поворот. Гироскопу тряска безразлична.
Точно помогут определить вид детектора и его модель специальные программы. К примеру, Sensor Box For Android, AnTuTu Benchmark, AIDA64.
Использование акселерометра или гироскопа с микроконтроллерами
Отдельно стоит упомянуть датчики положения, используемые в DIY- проектах. Речь идет об их вариантах, разработанных для совместного использования с Arduino или Raspberry PI.
С помощью подобных сенсоров и контролера можно определять текущее положение роботов или подвижной техники в пространстве. Доступно и вычисление текущей скорости. Для чего берется за основу импульсы изначального ускорения и характеристики торможения. Далее математически вычисляется текущее значение параметра. Причем крайний вариант применения не требует установки механической связи с подвижными частями подвески аппарата.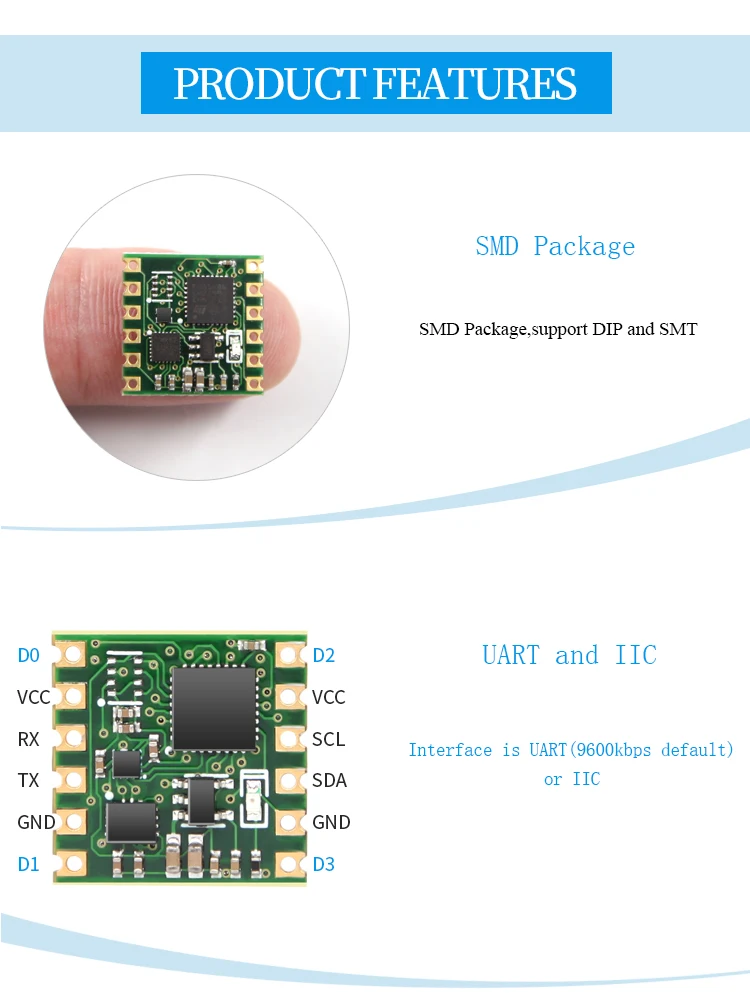 В некоторых случаях, настоящее действие может быть затруднено к исполнению.
В некоторых случаях, настоящее действие может быть затруднено к исполнению.
Резюмируя
Датчики положения для техники делятся на акселерометры и гироскопы. Первые определяют ускорение, воздействующее на сенсор, вторые его угол наклона в пространстве. Акселерометры можно использовать и в качестве гироскопа, вычисляя текущий поворот детектора относительно вектора земного притяжения. К сожалению, точность настоящих измерений будет низкой и сильно зависеть от сторонних факторов. Включая то, что для определения текущего положения датчика ускорения — под углом, стоя или лежа, требуется чтобы он находился в состоянии покоя. Для гироскопов последнее не критично.
Видео по теме
Хорошая реклама
Мобильная диагностика: как работают датчики уровня кислорода, пульса, ЭКГ и шума | Смарт-часы и фитнес-браслеты | Блог
Непростой 2020 год показал, что за здоровьем надо тщательно следить даже при самой невероятной занятости. Тем более, что развитие технологий позволяет делать это при помощи смартфона, умных часов или фитнес-браслета. Комбинация различных датчиков и софта может контролировать ряд важных параметров и делать выводы: все ли в порядке или стоит запланировать визит к врачу.
Тем более, что развитие технологий позволяет делать это при помощи смартфона, умных часов или фитнес-браслета. Комбинация различных датчиков и софта может контролировать ряд важных параметров и делать выводы: все ли в порядке или стоит запланировать визит к врачу.
Всплеск интереса к повседневному контролю здоровья случился после появления на рынке «умных» часов и браслетов. Разработчики с самого начала встраивали в них не только акселерометр и/или гироскоп с навигационным приемником, но и датчики контроля сердечных ритмов. Сейчас в такие устройства ставят несколько дополнительных чипов, позволяющих узнать о своем организме много полезного.
Давайте разберемся, какие датчики применяются в «умных» гаджетах, что они умеют и насколько точным получается результат измерений.
Акселерометр и гироскоп
Изначально эти датчики устанавливали в смартфоны. Когда появились «умные» часы и браслеты, их также оснастили такими чипами: на работе акселерометра, например, построена одна из основных задач всех «умных» гаджетов — подсчет количества шагов.
Сейчас все настолько привыкли к тому, что акселерометр и гироскоп есть в мобильных устройствах, что не видят между ними разницы. Тем более, что функции этих датчиков реализуются одной микросхемой. На самом деле разница есть. Если коротко, то акселерометр реагирует на ускорение предмета, а гироскоп — на изменение его положения в пространстве. Поэтому с помощью акселерометра можно, например, понять, нужно ли сменить ориентацию экрана смартфона или посчитать шаги. А с помощью гироскопа — точно определить положение тела.
Зачем это нужно в мобильной диагностике? С подсчетом шагов все ясно — это контроль здорового образа жизни. Но это больше относится к фитнесу. А как это помогает в плане наблюдений за своим самочувствием?
Дело в том, что связка акселерометра и гироскопа обеспечивает работу функции, способной определить, что владелец устройства упал. «Умный» гаджет на основании резкого изменения показаний датчиков делает вывод, что пользователю необходима помощь, и автоматически вызовет экстренные службы, например, скорую или полицию. Зачем это нужно? Например, гаджет оперативно вызовет врачей, если с вами случится какая-то неприятность на улице. А при инсульте и инфаркте очень важно, чтобы квалифицированная медицинская помощь была оказана как можно быстрее.
Зачем это нужно? Например, гаджет оперативно вызовет врачей, если с вами случится какая-то неприятность на улице. А при инсульте и инфаркте очень важно, чтобы квалифицированная медицинская помощь была оказана как можно быстрее.
К примеру, такая функция реализована в Apple Watch. По умолчанию она активируется у пожилых пользователей, также можно ее включить вручную.
Кстати, обратите внимание, что наличие акселерометра вместе с гироскопом позволяет получать более точные результаты тренировок: гироскоп точно распознает такие вещи, как бег на месте или прыжки, и понимает, когда вы идете пешком, а когда бежите.
Датчик пульса
Датчик пульса — первое устройство для мобильной диагностики, появившееся в носимых гаджетах. Он предназначен для контроля сердечных ритмов в состоянии покоя и при физической нагрузке. На основании собранной статистики можно оценить состояние здоровья и понять, оптимальны ли нагрузки на тренировках или, если имеются какие-либо заболевания, сориентироваться, не пора ли обратиться к специалисту.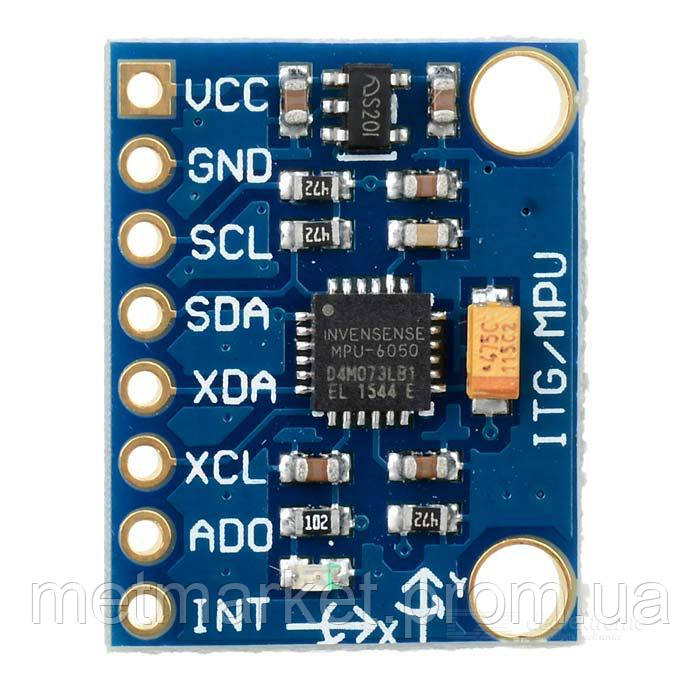
Измерения пульса
Датчики пульса, используемые в мобильных гаджетах, работают на основе оптической технологии — фотоплетизмографии (PPG). Смысл ее заключается в следующем. При сокращении сердечной мышцы в кровеносных сосудах изменяется кровяное давление и происходит изменение интенсивности капиллярного кровотока. Увеличившееся количество крови в сосуде поглощает больше поступающего света. Если подать поток света определенной интенсивности, то на основании прошедшего через ткань или отраженного сигнала можно сделать вывод об изменениях анализируемой среды: например, подсчитать количество «всплесков» кровотока в минуту и сделать вывод о частоте пульса.
В мобильных гаджетах подсчет пульса реализуется на основе как прошедшего через ткань света (в компактных пульсоксиметрах), так и отраженного — в «умных» часах и фитнес-браслетах. В них светодиод, размещенный на внутренней стороне устройства, испускает свет,который отражается от тканей запястья и поступает на фотодатчик, регистрирующий уровень отраженного сигнала.
Для подсветки используется светодиод зеленого цвета (525 нм). Зеленый цвет излучения выбран потому, что является наиболее контрастным к красному цвету крови, согласно цветовому кругу Иттена, а следовательно, лучше всего поглощается.
«Умные» гаджеты регистрируют пульс автоматически (по расписанию) или по желанию пользователя. На основании измеренных значений они построят красивые графики в мобильных или десктопных приложениях, которые помогут следить за уровнем пульса: контролировать выход за установленные пределы, наблюдать процесс в динамике за определенные интервалы времени. В целом с этой задачей мобильные устройства справляются хорошо.
Измерения артериального давления
Раз датчик пульса анализирует сердечные ритмы на основе изменений кровотока и давления, то логично предположить, что с его помощью можно не только посчитать пульс, но и измерить давление. Это на самом деле так. На основании данных, полученных от датчика пульса, программа может рассчитать величину артериального давления.
Но проблема заключается в том, что для того, чтобы получить близкий к реальному результат, необходимо выполнить калибровку устройства под конкретного пользователя. В противном случае измерение давления будет корректным только для тех, у кого оно находится на нормальном уровне, и еще не проявились возрастные изменения или проблемы, связанные с различными заболеваниями. Поэтому, если вы хотите с помощью «умных» гаджетов контролировать еще и давление, ищите модель с настройкой измерений под владельца.
Датчик ЭКГ
Еще более интересная вещь в плане контроля здоровья — датчик электрокардиографии (ЭКГ). Дело в том, что о работе сердца можно судить не только по изменениям кровотока в сосудах, но и по электрическим сигналам, которые возникают в процессе работы этого органа. И эта информация точнее и информативнее. Электрокардиограмма, полученная специалистом медицинского центра, позволяет сделать выводы о работе сердца и его здоровье. Для этого на руки, ноги и грудную клетку устанавливают электроды, а результат интерпретирует компьютер.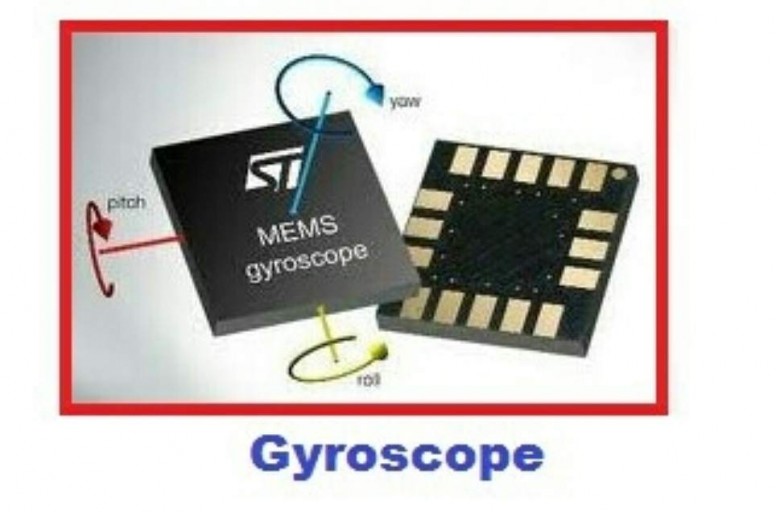
Точно такой же датчик ЭКГ, только миниатюрных размеров, сейчас устанавливают в ряд мобильных устройств. Например, начиная с 4-го поколения, датчик ЭКГ имеется в Apple Watch. Но с мобильными датчиками существует ряд проблем.
Дело в том, что в профессиональном медицинском оборудовании обычно используют 10-12 датчиков, минимум шесть из них размещают в области сердца. А носимое мобильное устройство крепится на запястье. То есть, оно удалено от сердца на большое расстояние. И датчиков в таких устройств
Как откалибровать датчики в смартфоне | Смартфоны | Блог
Производители редко об этом говорят, но в вашем смартфоне очень много датчиков. Зачем? Они экономят заряд аккумулятора, делают комфортной навигацию, избавляют от ошибочных нажатий и многое другое. Но случается так, что некоторые датчики начинают работать некорректно. Разбираемся, как откалибровать датчики смартфона вручную и возможно ли это вообще.
Какие бывают датчики в смартфоне и зачем они нужны?
Современные мобильные устройства обладают большим набором датчиков, и изредка среди них встречаются необычные варианты вроде измерения температуры и влажности окружающей среды, ультрафиолета и пульса, как это случилось со смартфоном Blackview BV9900.
Но стандартный набор включает в себя совсем другие, более привычные датчики.
Самым популярным из них можно смело назвать акселерометр. Предназначен для измерения ускорения по трем осям координат (X — поперечная, Y — продольная и Z — вертикальная) с учетом силы тяжести. Благодаря полученным данным смартфон словно начинает понимать свое положение в пространстве, и появляются такие функции, как автоповорот экрана или запуск приложений встряхиванием смартфона. Нашел себе применение акселерометр еще в некоторых играх и приложениях — за счет него при наклонах смартфона можно управлять чем-либо на экране. Такой способ управления станет хорошим дополнением сенсорному экрану.
Вторым по популярности идет датчик приближения (или приближенности), который отключает экран при телефонных разговорах, если смартфон находится возле уха (или любой другой части тела). А еще он может, наоборот, предотвратить включение дисплея, когда девайс находится в кармане. Почти все современные смартфоны оснащены отдельным датчиком приближения, но в некоторых устройствах реализован программный метод отключения экрана при разговоре, о котором в статье будет рассказано чуть позже.
Почти все современные смартфоны оснащены отдельным датчиком приближения, но в некоторых устройствах реализован программный метод отключения экрана при разговоре, о котором в статье будет рассказано чуть позже.
Датчик освещенности (освещения) тоже почти всегда используется за исключением редких бюджетных моделей. Он измеряет уровень внешнего освещения в люксах, и отвечает за автоматическую настройку яркости в зависимости от внешних условий. Более того, в некоторых смартфонах автояркость неотключаемая, а вместе с подсветкой может изменяться и насыщенность цветовых оттенков.
Через магнитометр (компас) измеряется внешнее магнитное поле, а точнее его напряженность по трем осям. Как нетрудно догадаться, компас нужен для определения сторон света, а также он упрощает работу с приложениями-навигаторами — на картах гораздо быстрее получается определить направление движения. Магнитометр, к сожалению, есть уже не во всех смартфонах, но вполне может обнаружиться в бюджетном устройстве.
Гироскоп, который иногда путают с акселерометром, на самом деле работает с ним в паре и пригодится для измерения скорости вокруг осей X, Y и Z. Без гироскопа невозможно смотреть 360-градусные видеоролики и пользоваться технологией VR, так как смартфон не сможет отследить и зафиксировать движения в трехмерном пространстве. Без гироскопа нельзя комфортно играть и в некоторые игры. Самым популярным примером является Pokemon Go, в которой пользователи с девайсами, у которых нет гироскопа, не могут включить режим дополненной реальности и ловить покемонов через камеру.
Частым гостем в смартфонах стал датчик под названием шагомер, который измеряет количество пройденных пользователем шагов. Без него некоторые приложения, предназначенные для отображения физической активности пользователя, либо вовсе не будут работать, либо у них станет доступна лишь часть функционала. При этом есть софт, который замеряет шаги только при помощи акселерометра, но такой метод подсчета будет менее точным.
Завершает список популярных датчиков барометр — он встречается обычно в дорогих смартфонах, либо в некоторых защищенных девайсах среднего ценового сегмента. Барометр измеряет атмосферное давление и высоту над уровнем моря, и в целом датчик, как и магнитометр, может стать полезным дополнением при навигации.
Полный список датчиков, доступных в смартфоне, можно посмотреть, установив на смартфон одно или несколько бесплатных приложений, среди которых выделяются Device Info, Датчикер и Senson Kinetics, но список достойных вариантов на этом вовсе не заканчивается. Интересно же то, что иногда в списках вы можете увидеть слово Virtual, что указывает на программное происхождение датчика, и давайте попробуем разобраться в том, что это такое.
Что такое виртуальные датчики?
рецепты приготовления для систем позиционирования / Блог компании RealTrac Technologies / Хабр
В этой заметке мы поговорим об инерциальных датчиках. О том, что они измеряют и о том, как эти физические величины можно использовать.
Большинство современных мобильных телефонов имеют на борту триады акселерометров, гироскопов и магнитометров, часто в дополнение к ним ставится и датчик атмосферного давления.
С последним датчиком все предельно ясно: почти у каждого из нас дома или на даче висит барометр и миллиметры его ртутного столба прочно связаны с дождем, непогодой и общим самочувствием любимой бабушки. А вот что измеряют акселерометр, гироскоп и магнитометр, и как использовать эту информацию для определения ориентации устройства в пространстве?
Акселерометр
В википедии сказано, что акселерометр — это прибор, измеряющий проекцию кажущегося ускорения. Типичный акселерометр состоит из трех взаимно перпендикулярных измерительных осей, регистрирующих гравитационное и линейные ускорения.
С помощью измерений трехосного акселерометра можно определить его ориентацию относительно опорного вектора, которым в данном случае является гравитационное ускорение. Тогда, однако, ориентация будет разрешена не полностью — останется неопределенность относительно угла поворота вокруг оси, параллельной направлению ускорения свободного падения.
Подробнее это пояснено на рисунке ниже. Представим, что в нашем распоряжении есть измерительное устройство с акселерометром, имеющим три оси X, Y и Z. На рисунке данные оси обозначены красным, зеленым и синим цветом и образуют левую тройку векторов. Очевидно, что если для определения ориентации доступен только вектор ускорения свободного падения, то будет существовать бесконечное число возможных ориентаций измерительного устройства, при которых ось Z акселерометра будет измерять значение ускорения свободного падения, но разрешить абсолютную ориентацию устройства мы не сможем.
Магнитометр
Чтобы разрешить ориентацию полностью, нужен второй базисный вектор, который не будет параллелен первому. Таким вектором может являться, например, вектор магнитного поля нашей планеты. Если известно его направление, то ориентация будет разрешена однозначно.
Зная ориентацию одной системы координат относительно другой становится возможным переводить измерения из системы координат устройства в глобальную. А знания об ускорениях в глобальной системе координат позволят путем интегрирования восстановить скорость и получить информацию об относительном местоположении.
Гироскоп
Гироскоп позволяет измерить скорость вращения устройства, соответственно для того, чтобы привести скорость к углу поворота мы должны её интегрировать. С этим положением связана основная проблема ориентации только при помощи гироскопа — из-за постоянного интегрирования не совсем точных измерений угловых скоростей, вызванных смещением нуля или температурными эффектами, мы получим дрейф ориентации, или, другими словами, она будет «уплывать» от истинного значения.
Преимущество использования всех трех датчиков в фильтре ориентации кроется в том, что:
- Благодаря измерениям гироскопа становится возможной одновременное подавление скачков ориентации с сохранением реактивности фильтра, фактически мы получаем аналог низкочастотного фильтра без какой-либо задержки, при визуализации наблюдается «плавность» при вращении объекта. Хороший фильтр для быстрого старта — фильтр Мадвика, но на мой взгляд, еще более интуитивным является фильтр Махони, так как в нем ошибка ориентации рассчитывается не с помощью градиента, а путем простого векторного умножения.
Подобные фильтры можно использовать и для объединения измерений пар датчиков. Например, на следующем рисунке показан результат оценки высоты с использованием фильтра Калмана, где в качестве измерений используются данные об атмосферном давлении, а в качестве внешнего воздействия — измерения акселерометра. Кстати на хабре есть подобное решение, там акселерометр и барометр используют для стабилизации высоты квадрокоптера. - Становится возможным включение в вектор состояния системы параметров датчиков: таких как смещение нуля акселерометра и гироскопа. Используемые фильтры, построенные на базе комплементарных или фильтра Калмана, постепенно сходятся к истинному значению смещения нуля датчика.
- Можно эффективно организовать сбор калибровочных данных. Так, при сборе калибровочных данных для магнитометра для максимально равномерного покрытия поверхности шара можно использовать данные об ориентации устройства и инициировать процесс калибровки только после того, когда все требуемые сегменты шара будут содержать как минимум одно измерение.
- Появляется возможность в той или иной мере разрешить основные проблемы при определении ориентации: оценить направление внешнего ускорения или определить, присутствует ли в данной точке локальное магнитное возмущение, а значит, не следует доверять измерениям магнитометра.
Как можно еще использовать данные от инерциальных датчиков?
Помимо традиционной и хорошо изученной задачи определения ориентации устройства, инерциальные датчики могут использоваться для:
- Сбора данных о магнитной карте помещения. Пример такой карты приведен на рисунке ниже. Видно, что в различных частях здания изменяется не только магнитуда магнитного поля (в мкТл), но и направление вектора магнитной индукции (обозначено розовой линией). Такую карту можно использовать для уточненного позиционирования объекта в дополнении к традиционным картам радиосигнала.
Восстановления траектории движения объекта. Таким объектом может быть пешеход или автомобиль. В отдельных случаях, например при креплении устройства на ноге и предварительной точной калибровке датчиков можно добиться ошибки возврата в точку начала движения, не превышающую десятков сантиметров для длины пути превышающей 100 метров. Пример восстановленной траектории методом ZUPT(при сбросе ошибки в периоды неподвижности), дополненным измерениями датчика атмосферного давления приведен на следующем рисунке (траектория движения включала в себя проход по коридору, спуск по лестнице, еще один проход и подъем на лифте). Подобный метод уже упоминался на хабре здесь.
При произвольном креплении устройства на теле человека ошибка возврата к исходной точке, как правило, куда больше и составляет 15-20% от пройденной дистанции. Такое её значение обусловлено, во-первых, ошибкой в определении длины шага, а во-вторых, ошибкой в определении направления движения.
Инициирования каких-либо событий или управления устройством. Это возможно сделать при помощи «рисования» устройством какой-либо фигуры или образа в воздухе, например символ ∞ может использоваться для запуска калибровки магнитометра, продольные взмахи устройством — для генерации экстренного сообщения, тройной «тап» — для выключения. Данные задачи решаются при помощи заранее обученных классификаторов.
- Определения текущей активности пользователя. Например, при использовании устройств в офисе может быть полезным знание о том, насколько много человек двигался в течение рабочего дня и типе движения — какую часть времени он провел стоя, сидя, сколько времени потратил на различные переходы по зданию.
В будущих статьях планируется раскрыть темы того, как работать с инерциальными датчиками — обсудить способы их калибровки (хотя это уже и обсуждалось на хабре), посмотреть на существующие способы восстановления траектории движения человека, изучить подходы к детектированию и устранению возмущений магнитного поля, а также обсудить архитектуру встроенного ПО для своевременного таймштампирования и обработки их измерений.
Автор — Александр Миков.
Что такое гироскоп в смартфоне, для чего нужен и отличие от акселерометра
Для каждого современного смартфона обычным делом является оснащение различными датчиками. К примеру, в смартфонах датчики отвечают за освещенность, приближение, магнитометрию, ускорение, приближение, измерение расстояния. Кроме того, смартфоны оснащаются акселерометрами и гироскопами. Вот о последнем мы и поговорим, поскольку многих интересует – что такое гироскоп, который зачастую работает в тандеме с акселерометром, а также – как им пользоваться?
Примечательно, что гироскоп был изобретен еще в середине XIX столетия французским ученым Леоном Фуко. С помощью изобретенного им гироскопа Фуко проводил наблюдения суточного вращения Земли. Что касается современных гироскопов, они применяются не только для того, чтобы определить вращение тела. Их основное предназначение – определить угол отклонения определенного тела по отношению к плоскости. Очень часто в смартфонах гироскоп работает в паре с акселерометром, благодаря чему можно отслеживать и фиксировать движение, причем в данном случае это касается трехмерного пространства.
Интересно, что первый смартфон, в спецификациях которого фигурировал гироскоп, стал «яблочный» гаджет iPhone 4. А, поскольку очень часто компания Apple выступает в роли законодателя моды, многие производители мобильных аппаратов подхватили идею и стали также оснащать свои смартфоны гироскопом. Справедливости ради стоит заметить, что применение гироскопа является не просто трендом, когда практическая польза вызывает сомнение. Применение гироскопа на самом деле привнесло пару совершенно новых и интересных возможностей. Как уже было сказано, в смартфонах гироскоп как правило применяется вместе с акселерометром, благодаря чему устройство становится более чувствительным к изменению положения, к примеру, это касается наклона, поворота и прочих даже самых незначительных движений. Такое оснащение с определенным программным обеспечением может обеспечить защиту смартфона во время его падения или удара.
Рентген гироскопа в iPhone 4
Кроме того, чтобы можно было полноценно взаимодействовать с гарнитурой виртуальной реальности гироскоп является просто незаменимой вещью, поскольку с его помощью происходит определение движения смартфона во всех направлениях. Иными словами, для того, чтобы нормально взаимодействовать с виртуальной реальностью, необходимо точное определение человека в пространстве, для чего собственно и нужен гироскоп. И, несмотря на то, что на сегодняшний день даже недорогие аппараты оснащена акселерометром, но для работы с приложениями виртуальной реальности его датчиков недостаточно по причине многих погрешностей и невозможности определения поворотов и движения в горизонтальной плоскости. Для наиболее эффективного погружения в виртуальную реальность требуется как акселерометр, так и гироскоп.
По своей сути, гироскоп в смартфоне является микроэлектромеханическим преобразователем угловых скоростей в электрический сигнал. Иными словами, в способность гироскопа входит расчет изменения угла наклона по отношению к оси в процессе поворота смартфона. Гироскоп относится к такому типу микроэлектромеханических систем (МЭМС), в которых присутствует как механическая, так и электронная часть. Размер такого чипа в среднем достигает нескольких миллиметров или даже меньше.
Между тем, современные мобильные аппараты оснащены гироскопом в основном для того, чтобы улучшить качество игры. Чтобы играть в гонку или другую игру на смартфоне уже не нужны виртуальные джойстики. Управление автомобилем или вертолетом можно осуществлять, просто изменяя положение смартфона в пространстве – наклоняя его вправо или влево, на себя или от себя, а также вперед или назад, держа его горизонтально. Гироскоп также умеет определять скорость, с которой аппарат перемещается. К примеру, для того, чтобы управлять игрой, можно воспользоваться не только поворотом смартфона, но и скоростью поворота. Благодаря этому не только играть, но и управлять смартфоном в целом можно более точно и удобно.
Вдобавок ко всему, гироскоп в смартфоне можно использовать для того, чтобы определить текущее местоположение на местности. С помощью смартфона, в оснащение которого входит гироскоп удобно определять направленность движения. В частности, это можно сделать с помощью GPS-навигации, когда карту можно повернуть в нужную сторону. Это можно сделать, просто повернувшись со смартфоном в руках в нужную сторону по отношению к искомому объекту, например, населенному пункту – карта также повернется в нужную вам сторону. Познавательную статью о том, какая разница между GPS и A-GPS вы найдете на нашем портале.
Чем отличается акселерометр от гироскопа
Между тем, раз уж мы упомянули об акселерометре, не вдаваясь в лишние подробности, коротко отметим, в чем заключается основное отличие акселерометра от гироскопа. Если коснуться основных отличий акселерометра и гироскопа, то стоит упомянуть о принципе их работы. В случае с гироскопом происходит вычисление угла наклона по отношению к земле, в то время как в возможности акселерометра входит подсчет собственного ускорения, также – относительно к земле. Как показывает практика, оба этих аппаратных компонента могут служить как поодиночке – хотя в некоторых случаях недостаточно эффективно – так и дополнять друг друга. Поэтому на сегодня подавляющее большинство смартфонов получают в оснащение как гироскоп, так и акселерометр.
В заключение стоит отметить, что некоторые пользователи предпочитают отключить гироскоп на смартфоне. Обусловлено это тем, что многие программы могут реагировать на изменение положение в пространстве с некоторым запозданием. Например, при просмотре картинок или фотографий, ориентация страницы может меняться при малейшем изменении положения тела, что может нервировать.
Что такое акселерометр и гироскоп и чем они отличаются?
Некоторые файлы cookie необходимы для безопасного входа в систему, но другие необязательны для функциональной деятельности. Сбор наших данных используется для улучшения наших продуктов и услуг. Мы рекомендуем вам принять наши файлы cookie, чтобы обеспечить максимальную производительность и функциональность нашего сайта. Для получения дополнительной информации вы можете просмотреть сведения о файлах cookie. Узнайте больше о нашей политике конфиденциальности.
Принять и продолжить Принять и продолжитьФайлы cookie, которые мы используем, можно разделить на следующие категории:
- Строго необходимые файлы cookie:
- Это файлы cookie, которые необходимы для работы аналога.com или предлагаемые конкретные функции. Они либо служат единственной цели передачи данных по сети, либо строго необходимы для предоставления онлайн-услуг, явно запрошенных вами.
- Аналитические / рабочие файлы cookie:
- Эти файлы cookie позволяют нам выполнять веб-аналитику или другие формы измерения аудитории, такие как распознавание и подсчет количества посетителей и наблюдение за тем, как посетители перемещаются по нашему веб-сайту. Это помогает нам улучшить работу веб-сайта, например, за счет того, что пользователи легко находят то, что ищут.
- Функциональные файлы cookie:
- Эти файлы cookie используются для распознавания вас, когда вы возвращаетесь на наш веб-сайт. Это позволяет нам персонализировать наш контент для вас, приветствовать вас по имени и запоминать ваши предпочтения (например, ваш выбор языка или региона). Потеря информации в этих файлах cookie может сделать наши службы менее функциональными, но не помешает работе веб-сайта.
- Файлы cookie для таргетинга / профилирования:
- Эти файлы cookie записывают ваше посещение нашего веб-сайта и / или использование вами услуг, страницы, которые вы посетили, и ссылки, по которым вы переходили.Мы будем использовать эту информацию, чтобы сделать веб-сайт и отображаемую на нем рекламу более соответствующими вашим интересам. Мы также можем передавать эту информацию третьим лицам с этой целью.
Разница между гироскопом и акселерометром Разница между
Гироскоп против акселерометра
Разница между гироскопом и акселерометром в том, что первый может определять вращение, а второй — нет. Трехосевой акселерометр может определять ориентацию неподвижной платформы относительно поверхности земли.Если платформа находится в свободном падении, ускорение будет равно нулю. Если он ускоряется только в определенном направлении, это ускорение будет неотличимо от ускорения, создаваемого гравитационным притяжением Земли. Таким образом, только акселерометр нельзя использовать для того, чтобы самолет сохранял определенную ориентацию.
Гироскоп, с другой стороны, может измерять скорость вращения вокруг определенной оси. Например, если гироскоп используется для измерения скорости вращения вокруг оси крена самолета, он будет давать ненулевое значение крена, пока самолет продолжает вращаться, но показывает ноль, если крен останавливается.
Еще один способ определить разницу между гироскопом и акселерометром — понять, что гироскоп помогает измерять или поддерживать ориентацию, используя принципы углового момента, тогда как акселерометр измеряет вибрацию. Другое отличие состоит в том, что гироскоп показывает угловую скорость, а акселерометр измеряет линейное ускорение.
2-осевой акселерометр показывает направление силы тяжести на балансировочном инструменте.Обычно гироскоп используется для измерения углового положения на основе принципа жесткости пространства гироскопа. Гироскоп имеет множество практических применений. Может использоваться для навигации, на беспилотных летательных аппаратах и радиоуправляемых вертолетах. С другой стороны, акселерометр находит широкое применение. Он используется в машиностроении, мониторинге оборудования, мониторинге зданий и сооружений, медицине, навигации, транспорте и бытовой электронике.
Использование акселерометров в бытовой электронике — относительно новое явление.Они используются в смартфонах и устройствах, таких как игровая приставка. Они также используются в ноутбуках и ноутбуках нового поколения.
Мы видим, что и гироскоп, и акселерометр имеют свои индивидуальные характеристики и функции. Любой из них может быть критически важным при правильном использовании.
Резюме:
1. Акселерометр для измерения поступательного движения и силы тяжести.
2. Акселерометр обнаруживает и измеряет электрический ток, возникающий в результате работы мышц.
3.Величина сигнала в случае акселерометра смещена под действием силы тяжести. С гироскопом дело обстоит иначе.
4. Информация относится к полосе пропускания и частоте, доступной в пределах нулевой частоты в случае гироскопа. С акселерометром это может быть не так.
5. Однократное интегрирование достаточно для достижения углового смещения в случае гироскопа, тогда как в случае акселерометра требуется сложное двухкратное интегрирование.
6. В случае гироскопа наблюдается высокое отношение сигнал / шум, тогда как в ускорителях обычно низкое отношение сигнал / шум.
гироскопов и акселерометров на чипе — Geek Mom Projects
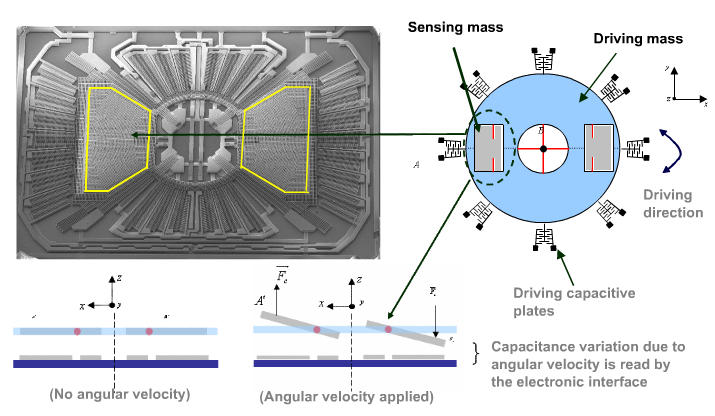
Внутренняя часть трехмерного датчика гироскопа MEMS сложна и крошечна (ширина этой структуры составляет всего около 0,08 см).
В моих последних двух записях в блоге обсуждались демонстрации гироскопов и сохранения углового момента на научной ярмарке в нашей школе. Одна из демонстраций, которые я собрал, показывает, как действительно маленькие гироскопические датчики, например, во многих смартфонах, пультах дистанционного управления для видеоигр или квадрокоптерах, предоставляют информацию об изменении их ориентации.Эта информация может использоваться в качестве обратной связи для самобалансировки (например, двухколесный самокат), навигации или в качестве входных данных для других приложений, таких как видеоигры.
Я не хотел жертвовать своим смартфоном ради этого эксперимента. К счастью, микросхемы, содержащие гироскопические датчики, относительно дешевы. При считывании данных с гироскопических чипов я обнаружил, что данные об ориентации от датчиков гироскопа склонны к значительному дрейфу со временем, поэтому гироскопические датчики часто комбинируются с дополнительными датчиками, такими как акселерометры или магнитометры, чтобы исправить этот эффект.Эту комбинацию датчиков часто называют IMU или «инерциальным измерительным блоком», и она используется в самолетах, космических кораблях, навигаторах GPS (для использования, когда сигналы GPS недоступны) и других устройствах. Количество входов датчиков в IMU обозначается как «DOF» (степени свободы), поэтому микросхема с 3-осевым гироскопом и 3-осевым акселерометром будет IMU с 6 степенями свободы.
Плата GY-521 содержит 3-осевой акселерометр и 3-осевой гироскоп в крошечной микросхеме MPU-6050 в центре.
MPU-6050 — это обычно используемый чип, который сочетает в себе гироскоп MEMS и акселерометр MEMS и использует стандартную шину I2C для передачи данных. Что еще более важно для меня, кто-то уже проделал тяжелую работу по обратному проектированию MPU-6050 и предоставил свободно доступный исходный код для использования микроконтроллера Arduino для получения данных MPU-6050. Существует ряд различных коммутационных плат, содержащих микросхему MPU-6050. Вы можете найти обзор многих из них на этой странице в разделе «Коммутационные платы».Заказал модуль GY-521 на Amazon.
Существует сложная библиотека под названием I2Cdevlib для доступа к MPU-6050 и другим устройствам I2C, написанная Джеффом Роубергом. Конкретный код находится в подпапке «MPU6050». Он использует аппаратный буфер на кристалле и возможности цифровой обработки движения MPU-6050 для преобразования данных между различными системами координат и объединяет данные от нескольких датчиков для получения большей точности и точности. Другая полезная библиотека под названием FreeIMU , написанная Фабио Варесано, специально предназначена для расчета ориентации с помощью IMU с несколькими датчиками, а также может выполнять сложную обработку данных.FreeIMU использует I2Cdevlib, но я обнаружил, что последняя версия I2Cdevlib, включенная в FreeIMU, конфликтует с версией I2Cdevlib от Rowberg, поэтому обязательно используйте правильную версию I2Cdevlib, если вы используете одну из этих библиотек.
Я искал быструю и грязную демонстрацию для нашей научной выставки, поэтому я адаптировал сокращенный код автора «Krodal» внизу этой страницы, чтобы читать необработанные данные с MPU-6050 и делать простые (ха-ха !) расчет углов поворота сам. Вернувшись, чтобы повторить свой эксперимент с упомянутыми ранее библиотеками, я понял, что было бы намного проще и точнее использовать вместо этого одну из предварительно написанных библиотек.Однако я многому научился в процессе преобразования необработанных данных датчика в углы поворота, так что стоило проделать это трудным путем.
GY-521 подключен к Arduino UNO. При использовании библиотек I2Clib и FreeIMU необходимы дополнительные подключения.
Чтобы установить оборудование, я припаял контакты разъема к GY-521 и подключил его к Arduino UNO через крошечную макетную плату. Электропроводка была тривиальной — требовалось всего четыре соединительных кабеля. Для питания подключите GND↔ GND и VCC↔ 3.3V (плата GY-521 имеет стабилизатор напряжения и может принимать 5 В или 3,3 В). Для передачи данных по шине I2C потребовалось всего два контакта: SDA (data) A4 и SCL (clock) ↔ A5 .
Получить необработанные данные было легко. Код Krodal сработал немедленно и сгенерировал результат, как показано ниже. Более сложный трюк — преобразовать эти необработанные числа в значимые данные.
[кодовая ячейка 1]
Я изменил код Кродала, чтобы начать с процедуры калибровки, которая усредняет первые 10 показаний для вычисления смещения датчика по умолчанию.Смещения вычитаются из необработанных значений датчика перед преобразованием значений в углы.
Теперь задача заключалась в том, чтобы вычислить углы поворота. Это может быть довольно сложно. Здесь довольно хорошо описана математика. Для GY-521 с плоской ориентацией, как показано, оси X и Y лежат в горизонтальной плоскости, а ось Z — вертикально.
Чтобы вычислить ориентацию с помощью акселерометра, мы полагаемся на тот факт, что существует постоянное гравитационное притяжение 1 g (9.2) вниз. Если на акселерометр не действуют никакие дополнительные силы (рискованное предположение, как мы увидим позже), величина обнаруженного ускорения всегда будет измеряться 1g, а вращение датчика может быть вычислено по очевидному положению вектора ускорения, как видно ниже. Если ось Z направлена вдоль вектора ускорения свободного падения, то невозможно вычислить вращение вокруг оси Z с помощью акселерометра.
На этой диаграмме показаны расчеты углов наклона по измеренным векторам ускорения.2) путем деления на коэффициент 16384. Однако, поскольку преобразование в углы использует отношения компонентов вектора ускорения, этот коэффициент делится. Я вычислил вращение вокруг оси X (φ) и оси Y (-ρ), используя формулы на изображении слева. Интерпретация диаграммы слева немного сложна, поскольку наклон оси X фактически показывает вращение вокруг оси Y, а наклон оси Y показывает (отрицательное) вращение вокруг оси X.
Важно отметить, что результаты акселерометра обеспечивают точные углы ориентации, если сила тяжести является единственной силой, действующей на датчик.Однако при перемещении и вращении датчика мы прикладываем к нему силы, что приводит к колебаниям измерений. В конечном итоге данные акселерометра имеют тенденцию быть очень зашумленными, с кратковременными, но значительными искажениями. Если их можно усреднить, акселерометр дает точные результаты в более длительных временных масштабах, чем возмущения.
Вычисление ориентации от датчика гироскопа отличается, поскольку гироскоп измеряет угловую скорость (скорость изменения угла ориентации), а — не угловую ориентацию.Чтобы вычислить ориентацию, мы должны сначала инициализировать положение датчика с известным значением (возможно, от акселерометра), затем измерить угловую скорость (ω) вокруг осей X, Y и Z через измеренные интервалы (Δt). Тогда ω × Δt = изменение угла. Новый угол ориентации будет исходным углом плюс это изменение. Проблема с этим подходом заключается в том, что мы интегрируем — складываем множество небольших вычисленных интервалов — чтобы найти ориентацию. Неоднократное добавление приращений ω × Δt приведет к тому, что небольшие систематические ошибки будут увеличиваться со временем.Это причина гироскопического дрейфа, и по прошествии длительного времени данные гироскопа будут становиться все более неточными.
Таблица данных MPU-6050 показывает, что деление необработанных значений гироскопа на 131 дает угловую скорость в градусах в секунду, которая, умноженная на время между показаниями датчика, дает изменение углового положения. Если мы сохраняем предыдущее угловое положение, мы просто добавляем вычисленное изменение каждый раз, чтобы найти новое значение.
Как объяснялось выше, данные акселерометра и гироскопа подвержены систематическим ошибкам.Акселерометр обеспечивает точные данные в течение длительного периода времени, но создает помехи в краткосрочной перспективе. Гироскоп предоставляет точные данные об изменении ориентации в краткосрочной перспективе, но необходимая интеграция приводит к смещению результатов в более длительных временных масштабах.
Решение этих проблем состоит в том, чтобы объединить данные акселерометра и гироскопа вместе таким образом, чтобы погрешности компенсировались. Стандартный метод объединения этих двух входных данных — использование фильтра Калмана , , что является довольно сложной методологией.К счастью, существует более простое приближение для объединения этих двух типов данных, которое называется дополнительным фильтром . Здесь (AVRFreaks) и здесь (Шейн Колтон) даются гораздо лучшие объяснения, чем я мог бы написать, но приблизительная формула для объединения данных акселерометра и гироскопа:
Угол фильтра = α × (угол гироскопа) + (1 — α) × (угол акселерометра) , где
α = τ / (τ + Δt) и (угол гироскопа) = (последний измеренный отфильтрованный угол) + ω × Δt
Δt = частота дискретизации, τ = постоянная времени больше, чем шкала типичного шума акселерометра
У меня была частота дискретизации около 0.04 секунды и выбрал постоянную времени около 1 секунды, получив α ≈ 0,96.
Итак, теперь у меня есть данные гироскопа, данные акселерометра и отфильтрованная комбинация этих двух. Чтобы визуализировать, как все эти данные сравниваются, я использовал Processing, язык программирования и среду с открытым исходным кодом (очень похожую на Arduino IDE), которая особенно хорошо подходит для визуализации данных. Я изменил эскиз Arduino, чтобы отправлять обработанный датчик и отфильтрованные данные через последовательный порт, и написал эскиз обработки, чтобы показать выходной сигнал датчика и фильтра применительно к трем трехмерным прямоугольникам.Обратите внимание, что вы должны использовать 32-разрядную версию Processing для получения доступа к последовательному порту. Для всех, кому интересно,
вот скетч Arduino:
и скетч обработки (15 января 2015 г. я обновил скетч обработки, чтобы исправить ошибку отображения, появившуюся в обработке 2.1.1):.Видео ниже демонстрирует различия в акселерометре, гироскопе и отфильтрованных данных:
Связанные
Акселерометр: что это и как работает
Акселерометр — это устройство, которое измеряет вибрацию или ускорение движения конструкции.Сила, вызванная вибрацией или изменением движения (ускорением), заставляет массу «сжимать» пьезоэлектрический материал, который производит электрический заряд, который пропорционален приложенной к нему силе. Поскольку заряд пропорционален силе, а масса постоянна, то заряд также пропорционален ускорению.Подробнее об акселерометрах
ДАТЧИК ПЬЕЗОЭЛЕКТРИЧЕСКОЙ СИЛЫ Пьезоэлектрический датчик силы почти такой же жесткий, как кусок твердой стали сопоставимых размеров.Такая жесткость и прочность позволяет вставлять эти датчики непосредственно в машины как часть их конструкции. Типы акселерометров
Существует два типа пьезоэлектрических акселерометров (датчиков вибрации). Первый тип — это акселерометр с выходом заряда с «высоким сопротивлением». В этом типе акселерометра пьезоэлектрический кристалл производит электрический заряд, который напрямую связан с измерительными приборами. Для вывода заряда требуются специальные приспособления и приборы, которые чаще всего встречаются в исследовательских центрах.Этот тип акселерометра также используется в высокотемпературных приложениях (> 120 ° C), где нельзя использовать модели с низким импедансом.
Второй тип акселерометра — это акселерометр с низким сопротивлением на выходе. Акселерометр с низким импедансом имеет акселерометр заряда в качестве переднего конца, но имеет крошечную встроенную микросхему и транзистор на полевом транзисторе, который преобразует этот заряд в напряжение с низким импедансом, которое может легко взаимодействовать со стандартными приборами. Этот тип акселерометра обычно используется в промышленности.Источник питания акселерометра, такой как ACC-PS1, обеспечивает надлежащее питание микросхемы от 18 до 24 В при постоянном токе 2 мА и снимает уровень смещения постоянного тока, они обычно вырабатывают выходной сигнал с нулевым значением до +/- 5 В в зависимости от Рейтинг акселерометра в мВ / г. Все акселерометры OMEGA (R) относятся к этому типу с низким импедансом.
Технические характеристики акселерометра
Динамический диапазон — это +/- максимальная амплитуда, которую акселерометр может измерить до искажения или ограничения выходного сигнала.Обычно указывается в g.
Частотная характеристика определяется массой, пьезоэлектрическими свойствами кристалла и резонансной частотой корпуса. Это частотный диапазон, в котором выходной сигнал акселерометра находится в пределах указанного отклонения, обычно +/- 5%. g 1g — ускорение свободного падения, которое составляет 32,2 фут / с2, 386 дюймов / с2 или 9,8 м / с2.
Заземление — В акселерометрах есть два типа сигнального заземления. У акселерометров с заземлением корпуса сторона низкого уровня сигнала подключена к корпусу.Поскольку корпус является частью пути прохождения сигнала и может быть прикреплен к проводящему материалу, при использовании акселерометра этого типа необходимо соблюдать осторожность, чтобы избежать шума от земли. У акселерометров с изоляцией от земли электрические компоненты изолированы от корпуса, и они гораздо менее восприимчивы к помехам, наводимым землей.
Верхний предел частоты — это частота, при которой выходной сигнал превышает указанное отклонение выходного сигнала. Обычно это определяется механическим резонансом акселерометра.
Отсечка по низкой частоте — это частота, при которой выходной сигнал начинает падать ниже заявленной точности. Выход не «отсекается», но чувствительность быстро уменьшается с понижением частоты.
Шум — Электронный шум генерируется схемой усиления. Шум может быть либо широкополосным (указанным в частотном спектре), либо спектральным — обозначенным на определенных частотах. Уровни шума указаны в g, т.е. 0,0025 g 2-25 000 Гц. Шум обычно уменьшается с увеличением частоты, поэтому шум на низких частотах является большей проблемой, чем на высоких частотах.
КАК ВЫБРАТЬ АКСЕЛЕРОМЕТР?- 1. Какую амплитуду вибрации следует контролировать?
- 2. Какой частотный диапазон нужно контролировать?
- 3. Каков температурный диапазон установки?
- 4. Каков размер и форма исследуемого образца?
- 5. Есть ли электромагнитные поля?
- 6. Имеется ли поблизости высокий уровень электрических шумов?
- 7. Заземлили ли поверхность, на которой должен быть установлен акселерометр?
- 8.Является ли окружающая среда агрессивной?
- 9. Требуются ли в данной зоне искробезопасные или взрывозащищенные приборы?
- 10. Область влажная или вымытая?
Частота резонанса — это частота, на которой датчик резонирует или звонит. Измерения частоты должны быть намного ниже резонансной частоты акселерометра.
Чувствительность — это выходное напряжение, создаваемое определенной силой, измеряемой в g. Акселерометры обычно делятся на две категории — производящие 10 мВ / г или 100 мВ / г.Частота выходного переменного напряжения будет соответствовать частоте колебаний. Уровень выходного сигнала будет пропорционален амплитуде колебаний. Акселерометры с низкой выходной мощностью используются для измерения высоких уровней вибрации, а акселерометры с высокой выходной мощностью используются для измерения вибраций с низким уровнем.
Температурная чувствительность — это выходное напряжение на градус измеренной температуры. Датчики имеют температурную компенсацию, чтобы поддерживать изменение выходного сигнала в указанных пределах при изменении температуры.
Диапазон температур ограничен электронной микросхемой, которая преобразует заряд в выходной сигнал с низким сопротивлением. Обычно диапазон составляет от -50 до 120 ° C.
Другие соображения при выборе акселерометра:
Масса акселерометров должна быть значительно меньше массы контролируемой системы. Динамический диапазон акселерометра должен быть шире, чем ожидаемый диапазон амплитуды колебаний образца. Частотный диапазон акселерометра должен соответствовать ожидаемому частотному диапазону.Чувствительность акселерометра должна обеспечивать электрический выходной сигнал, совместимый с существующими приборами. Используйте акселерометр с низкой чувствительностью для измерения вибраций с высокой амплитудой и, наоборот, используйте акселерометр с высокой чувствительностью для измерения вибраций с низкой амплитудой.
Выберите правильный акселерометр
Акселерометр премиум-класса
Эти акселерометры изготовлены из отборных кристаллов премиум-класса и используют малошумную схему для создания первоклассного малошумящего акселерометра.Их корпус из нержавеющей стали 316L герметично защищен от воздействия окружающей среды, поэтому они могут выдерживать суровые промышленные условия. У них также есть варианты искробезопасности FM и CSA. ACC793 — это стандартная конфигурация верхнего кабеля, а ACC797 — низкопрофильная конфигурация бокового кабеля.
ПОЧЕМУ ВАМ НУЖЕН ГИРОГРАФ ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ
Bowflex SelectTech 560® (ST560) — это «умная» гантель, тренажер со встроенными датчиками и обработкой, обеспечивающими обратную связь во время тренировки.ST560 имеет инерциальный измерительный блок (IMU) для определения движения устройства. Пользовательские алгоритмы преобразуют необработанные данные о движении в информацию о качестве и скорости повторения упражнения, а также позволяют устройству подсчитывать успешные повторения. Эти знания можно использовать для повышения эффективности тренировки, а также в качестве простого метода записи завершенных тренировок. Он также может сделать эту информацию доступной в социальных сетях для неформального соревнования с друзьями.Компания Simplexity Product Development активно участвовала в разработке ST560, владея большей частью встроенного программного обеспечения продукта, а также создавая все алгоритмы обработки данных, используемые для преобразования необработанных данных датчиков в ключевые показатели упражнений.
Чтобы точно объяснить, почему нужен гироскоп, я проработаю упрощенный двумерный пример движения ST560 для случая использования сгибания бицепса. В этом примере движение, которое мы рассматриваем, — это вращение устройства вокруг моего локтя.У меня длина предплечья около 14 дюймов (355 мм), и мы предположим, что я делаю повторение, которое перемещает гантель на 180 градусов чуть менее чем за одну секунду, скажем, за 800 миллисекунд (мс). Путь для анализа показан на изображении слева.
Распространенное заблуждение о таких продуктах, как ST560 и HSI Loop CPR Training Device®, состоит в том, что единственный требуемый датчик — это акселерометр. Чтобы создать жизнеспособный IMU для измерения положения устройства в свободном пространстве, критически важно иметь как 3-осевой акселерометр, так и 3-осевой гироскоп скорости.
В момент t = 0 моя рука прямо вниз. Я вращаю гантель вокруг локтя (красный кружок), пока она не поднимется прямо на t = 800 мс. Для простоты движения предположим, что я ускоряюсь половину времени (от t = 0 до t = 400 мс), а затем замедляю вторую половину (до t = 800 мс).
Основная концепция устройства ST560 заключается в том, что мы хотим использовать недорогой акселерометр для измерения этого движения. Для этого мы измеряем ускорение устройства в направлениях X и Z, а затем дважды интегрируем каждый из этих сигналов, чтобы преобразовать ускорение в положение в каждом направлении.
Следующие три диаграммы показывают положение, скорость и ускорение устройства в обоих направлениях X и Z. Это дает нам первое представление о сигналах акселерометра, с которыми мы будем иметь дело.
Обратите внимание, что я добавил смещение из-за гравитационного ускорения к данным ускорения по оси Z. Акселерометры улавливают это, поэтому важно добавить.
Если вы думаете о профиле движения и помните свои базовые вычисления (ускорение — это производная скорости по времени, скорость — производная по времени от положения), эти графики должны составлять смысл.
Чтобы получить измерение положения, нам просто нужно удалить гравитационное ускорение с акселерометра Z, дважды интегрировать, и у нас есть положение. Звучит просто, правда?
Вот где начинаются сложности. Графики работают в предположении, что канал X акселерометра измеряет ускорение X, а канал Z измеряет ускорение Z. Что произойдет, если пользователь повернет устройство во время движения? На самом деле, когда я сгибаю бицепс, я стараюсь крепко сжимать гантель, что заставляет все устройство вращаться в пространстве, чтобы оставаться на одной линии с моей рукой.Таким образом, вместо того, чтобы каналы акселерометра оставались выровненными с глобальной системой отсчета, используемой для измерения движения, они фактически измеряли во вращающейся системе отсчета. На рисунке слева показано, как оси X-Z вращаются (маленькие черные стрелки) во время движения.
На рисунке ниже показано, как вращение влияет на измеренные сигналы ускорения. Измерения без поворота показаны синим цветом, а измерения с повернутой системой координат — красным.
Понятно, что эти сигналы очень разные.Чтобы взглянуть на данные с другой стороны, диаграмма слева показывает вектор ускорения X-Z на снимках каждые 100 мс во время движения. И снова синие стрелки представляют собой измерения без поворота, а красные стрелки показывают измерения из повернутой системы координат. Число возле стрелки — время, когда было произведено измерение. Обратите внимание, что при t = 0 стрелки располагаются друг над другом, поскольку локальный опорный кадр выровнен с глобальным опорным кадром.
Как ясно видно на графике, когда устройство начинает вращаться, измеренный вектор ускорения начинает вращаться от значения, которое мы хотим измерить.Если бы мы интегрировали повернутые сигналы, мы бы в конечном итоге оценили совершенно неверное положение. Фактически, с повернутыми сигналами неясно, как убрать гравитацию из измерения, поскольку мы знаем, что сигнал гравитации не является 100% -ным в измерении Z. Какую часть силы тяжести в 1 G следует вычесть из каждого измерения?
Если бы мы знали точное движение заранее, у нас был бы шанс. Однако когда мы хотим измерить общее движение чего-то вроде гантели ST560, у нас просто не хватает информации.
ВОЙДИТЕ В ГИРОСКОП!
Как вы уже догадались, решение проблемы состоит во внедрении гироскопа в конструкцию. Гироскопы скорости — стандартные компоненты в недорогих IMU сотовых телефонов. Гироскоп измеряет скорость вращения тела. При использовании в сочетании с акселерометром вы теоретически имеете всю информацию, необходимую для оценки ориентации устройства. Я говорю «теоретически», потому что с этими устройствами есть несколько практических проблем, которые усложняют ситуацию.Я обращусь к ним в следующей публикации в блоге. А пока предположим, что у нас есть идеальные сенсоры.
Поскольку я для удобства отбросил немного реальности, мы можем использовать следующий высокоуровневый алгоритм для оценки положения нашего устройства в 2D-пространстве. Шаги следующие:
- Когда мы не в движении, устанавливаем базовую ориентацию.
- Мы можем сказать, не движемся ли мы, потому что величина вектора ускорения будет равна 1,0, в то время как на сигналах гироскопа в течение некоторого времени будут нули (вам нужно выяснить, сколько времени это для вашего применение).
- Когда вы не в движении, вы измеряете только силу тяжести, чтобы знать, где находится нижняя сторона. В случае 2D-изображения это все, что вам нужно для определения базовой ориентации.
- Начиная с базовой ориентации, начните интегрирование сигналов гироскопа. Интегрированный сигнал гироскопа представляет ориентацию устройства.
- Измерьте сигналы на каналах акселерометра.
- Используя информацию об ориентации из шага 2, поверните данные акселерометра, чтобы выровнять их с глобальной системой отсчета.
- Вычтите сигнал силы тяжести из глобально ориентированного сигнала ускорения Z.
- Дважды интегрируйте глобально ориентированные сигналы ускорения, чтобы получить ускорение и занять позицию.
ДОПОЛНИТЕЛЬНЫЙ КРЕДИТ!
В приведенном выше анализе и алгоритме мы сделали неявное предположение, которое может быть проблематичным в некоторых проектах. Все, что я представил до сих пор, предполагает, что акселерометр установлен в центре масс вашего устройства. Если это не так, то простое вращение устройства вызовет ускорение на датчике.Для небольших монтажных смещений и медленных вращений этот сигнал можно игнорировать. Если нет, вы можете использовать данные гироскопа, чтобы удалить этот сигнал ошибки. Для этого выполните следующие действия:
- Считайте сигналы гироскопа скорости напрямую (без интегрирования, мы после скорости вращения). Скорость вращения обозначена ω.
- Оцените угловое ускорение , взяв производную по времени сигналов гироскопа. Это можно оценить, просто вычтя предыдущее показание из текущего и разделив на время выборки.Это угловое ускорение обозначается как α.
- Рассчитайте линейные тангенциальные и центростремительные ускорения, вызванные вращением:
Acceltangental = α x r
, где r представляет собой расстояние от центра масс до датчика.
Accelcentripital = ω 2 / r
- Считайте показания акселерометров.
- Вычтите значения ускорения, вычисленные на шаге 3, из измеренных значений ускорения до выполнения любых вращений.
- Продолжайте обработку сигналов, как описано ранее.
Для Bowflex SelectTech 560 использование акселерометра и гироскопа было критически важным для создания пригодных для использования данных о местоположении. Описанный выше алгоритм лег в основу обработки наших данных. Конечно, реалии неидеальных датчиков и работы в трехмерной среде значительно усложняют ситуацию.
ПОЧЕМУ МОЖЕТ НУЖАТЬСЯ КОМПАС
Как это обычно бывает, в реальности все может быть немного сложнее.Гироскопы — не идеальные датчики. У них есть как смещение постоянного тока, так и шум в сигнале. Когда вы объединяете сигналы с такими типами ошибок, интегрированное значение дрейфует. При одновременном использовании нескольких датчиков вам понадобится какой-то алгоритм слияния датчиков (когда я это делал, я использовал расширенный фильтр Калмана). Алгоритм слияния датчиков отвечает за «стабилизацию» гироскопа. То есть оценка смещения и шума и их устранение, чтобы интегрированный сигнал не дрейфовал.
