Как подключить и запрограммировать гироскоп MPU6050 к Arduino. Что такое акселерометр и гироскоп. Как получать и анализировать данные с MPU6050 на высокой частоте. Как калибровать и смещать показания датчика.
Что такое MPU6050 и зачем он нужен
MPU6050 — это недорогой 6-осевой акселерометр и гироскоп, предназначенный для точного отслеживания движения в трехмерном пространстве. Он позволяет измерять ускорение и угловую скорость по трем осям X, Y и Z. Основные области применения MPU6050:
- Определение ориентации устройств (смартфоны, планшеты)
- Анализ вибраций в технике
- Стабилизация камер
- Отслеживание движений в виртуальной реальности
- Навигационные системы
MPU6050 имеет следующие ключевые характеристики:
- 3 16-битных АЦП для оцифровки показаний акселерометра
- 3 16-битных АЦП для оцифровки показаний гироскопа
- Диапазон измерения гироскопа: ±250, ±500, ±1000, ±2000°/сек
- Диапазон измерения акселерометра: ±2g, ±4g, ±8g, ±16g
- Интерфейс I2C для подключения к микроконтроллеру
- Напряжение питания: 3.3В
- Частота опроса: до 8 кГц
Подключение MPU6050 к Arduino
Для подключения MPU6050 к Arduino Uno потребуется следующее оборудование:
- Arduino Uno
- Модуль MPU6050
- Модуль SD-карты
- SD-карта 16 ГБ
- Аккумулятор LiPo 3.7В
- Повышающий преобразователь 3.7В в 5В
- Соединительные провода
Схема подключения:
- VCC MPU6050 -> 3.3В Arduino
- GND MPU6050 -> GND Arduino
- SCL MPU6050 -> A5 Arduino
- SDA MPU6050 -> A4 Arduino
- VCC SD модуля -> 5В от повышающего преобразователя
- GND SD модуля -> GND Arduino
- CS SD модуля -> 10 Arduino
- MOSI SD модуля -> 11 Arduino
- MISO SD модуля -> 12 Arduino
- SCK SD модуля -> 13 Arduino
Программирование Arduino для работы с MPU6050
Для получения данных с MPU6050 на высокой частоте (500 Гц) и их сохранения на SD-карту используется специальный скетч Arduino. Основные этапы работы программы:
- Инициализация MPU6050 и SD-карты
- Ожидание сигнала начала записи (высокий уровень на D3)
- Непрерывное считывание показаний акселерометра и гироскопа
- Запись данных в буфер в памяти
- При заполнении буфера — сброс на SD-карту
- При получении сигнала остановки — завершение записи
- Конвертация бинарных данных в CSV формат
Для работы с SD-картой используется библиотека SDFat. Она обеспечивает высокую скорость записи данных.

Получение и анализ данных с MPU6050
После записи данных на SD-карту их можно проанализировать с помощью Python. Основные этапы анализа:
- Чтение CSV файла с данными
- Преобразование временных меток в секунды
- Смещение данных для компенсации начального положения
- Калибровка с учетом гравитации
При анализе важно учитывать следующие моменты:
- Начальное смещение нуля акселерометра
- Влияние силы тяжести на показания по оси Z
- Дрейф нуля гироскопа со временем
- Шумы и вибрации, влияющие на измерения
Калибровка и смещение показаний MPU6050
Для получения точных данных необходимо выполнить калибровку MPU6050:
- Измерение начального смещения нуля в неподвижном состоянии
- Определение масштабных коэффициентов для каждой оси
- Компенсация влияния температуры на показания
- Учет неортогональности осей сенсора
- Калибровка с использованием прецизионного поворотного стола
Процедура простой калибровки:
- Расположить MPU6050 горизонтально
- Записать показания акселерометра и гироскопа в течение 10-20 секунд
- Вычислить среднее значение для каждой оси
- Использовать полученные значения для компенсации смещения нуля
Применение фильтра Калмана для улучшения данных
Фильтр Калмана позволяет объединить данные с акселерометра и гироскопа для получения более точной оценки ориентации. Основные преимущества:
- Снижение шумов измерений
- Компенсация дрейфа гироскопа
- Устранение влияния кратковременных ускорений
- Оптимальное слияние данных с разных сенсоров
Реализация фильтра Калмана требует знания теории оценивания и матричных вычислений. Для Arduino существуют готовые библиотеки, реализующие фильтр Калмана для MPU6050.
Примеры проектов с использованием MPU6050
MPU6050 можно применять во множестве интересных проектов:
- Стабилизация камеры для съемки
- Система контроля осанки
- Шагомер и трекер активности
- Управление квадрокоптером
- Датчик падения для пожилых людей
- Система виртуальной реальности
- Измеритель вибраций двигателя
При разработке проектов важно учитывать особенности работы с MPU6050 — необходимость калибровки, чувствительность к вибрациям, ограничения по частоте опроса.
Заключение и перспективы использования MPU6050
MPU6050 является доступным и функциональным датчиком движения, который находит широкое применение в различных проектах. Основные преимущества:
- Низкая стоимость
- Компактные размеры
- Высокая точность измерений
- Простота подключения по I2C
- Наличие готовых библиотек
В то же время при работе с MPU6050 необходимо учитывать ряд особенностей:

- Необходимость калибровки
- Чувствительность к температуре
- Дрейф показаний со временем
- Влияние вибраций на точность
Дальнейшее развитие датчиков движения идет в направлении повышения точности, снижения энергопотребления и интеграции дополнительных функций, таких как Bluetooth или Wi-Fi для беспроводной передачи данных.
Гироскоп ардуино в категории «Контрольно-измерительные приборы»
в Украине, в товарах / по продавцам
Акселерометры
Наборы и компоненты для самостоятельной сборки электроники
Развивающие и обучающие игрушки
Запчасти и комплектующие для 3D устройств
Микросхемы
- Uno R3
- Внешние датчики
- Звуковой датчик
- Ардуино нано
- Гироскопический шар
Акселерометр и гироскоп 3х осевой MPU6050 GY521 Arduino
На складе в г. Умань
Доставка по Украине
100 грн
Купить
Интернет-магазин «FreeBuy.in.ua»
Модуль акселерометр + гироскоп MPU-6050 GY-521
На складе
Доставка по Украине
77.90 грн
Купить
Магазин «Солдер»
3-х осьовий гіроскоп, акселерометр MPU-6050
Доставка по Украине
154 грн
Купить
«DiyLab» — інтернет-магазин електронних модулів та компонентів
Акселерометр 3-х осьовий ADXL345
Доставка по Украине
154 грн
Купить
«DiyLab» — інтернет-магазин електронних модулів та компонентів
АКСЕЛЕРОМЕТР И ГИРОСКОП MPU-6050
Доставка по Украине
108. 39 грн
39 грн
Купить
Интернет магазин «MICRO-TEXHИK»
MPU-6050 GY-521 акселерометр + гироскоп (3х осевой) для Ардуино MPU6050 I2C Module 3 Axis Gyroscope and Accele
Недоступен
75 грн
Смотреть
ФОП Носуль С. А. работает nosul.com.ua
Акселерометр и гироскоп модуль для Ардуино MPU-6050 (GY-521)
Недоступен
89 грн
Смотреть
«SashaMika»
3-осевой гироскоп акселерометр GY-521 MPU-6050 для Arduino
Недоступен
136 грн
Смотреть
ІНТЕРНЕТ-МАГАЗИН «ЗАКУПИСЬ»
Акселерометр и гироскоп MPU-6050 модуль GY-521
Недоступен
42 грн
Смотреть
РадиоВольт — лучшие товары для радиолюбителя
GY-521 Arduino акселерометр гироскоп 3-осевой на MPU-6050
Недоступен
65 грн
Смотреть
Double-Shop
Гироскоп акселерометр GY-521, MPU-6050 Arduino [#4-8]
Недоступен
54 грн
Смотреть
Ardu.prom.ua (наложка НП от 150 грн!)
Акселерометр и гироскоп MPU-6050 модуль GY-521
Недоступен
42 грн
Смотреть
RadioCron — магазин для радиолюбителя
GY-521 MPU-6050 датчик ускорения, 3-осевой гироскоп и трехосевой акселерометр для ARDUINO
Недоступен
84. 40 грн
40 грн
Смотреть
Інтернет-магазин «Електроніка»
GY-521 Акселерометр и гироскоп MPU-6050 модуль 6DOF
Недоступен
52 грн
Смотреть
Интернет-магазин «3D-CNC.PRO»
Модуль датчик акселерометр и гироскоп для Ардуино GY-9255
Недоступен
241 грн
Смотреть
Ником радио-маркет
Смотрите также
Іграшка ГІРОСКОП
Недоступен
550 грн
Смотреть
Головолом
Акселерометр и гироскоп MPU-6050 модуль GY-521
Недоступен
43 грн
Смотреть
307wat — электроника в каждый дом!
Продавцы
Смотрите также
Гироскопический шар
Звуковой датчик
Внешние датчики
Ардуино нано
Uno R3
Гироскопы юлы волчки
Эспандер кистевой гироскопический
Кистевой тренажер powerball повербол
Arduino Nano
Набор датчиков
Гироскопический тренажер
Power Ball
Ик датчики
Гироскоп ардуино оптом
Популярные категории
Контрольно-измерительные приборы
Радиоизмерительные приборы
Акселерометры
Техника и электроника
Запчасти для техники и электроники
Наборы и компоненты для самостоятельной сборки электроники
Товары для детей
Игрушки
Развивающие и обучающие игрушки
Компьютерная техника и ПО
Комплектующие для компьютерной техники
Микросхемы
3D устройства
Запчасти и комплектующие для 3D устройств
Акселерометр и гироскоп 3х осевой MPU6050 GY521 Arduino
Акселерометр и гироскоп 3х осевой MPU6050 GY521 ArduinoО магазине Условия заказов Оптовикам Дропшиппинг Статус заказа Контакты
613
Описание
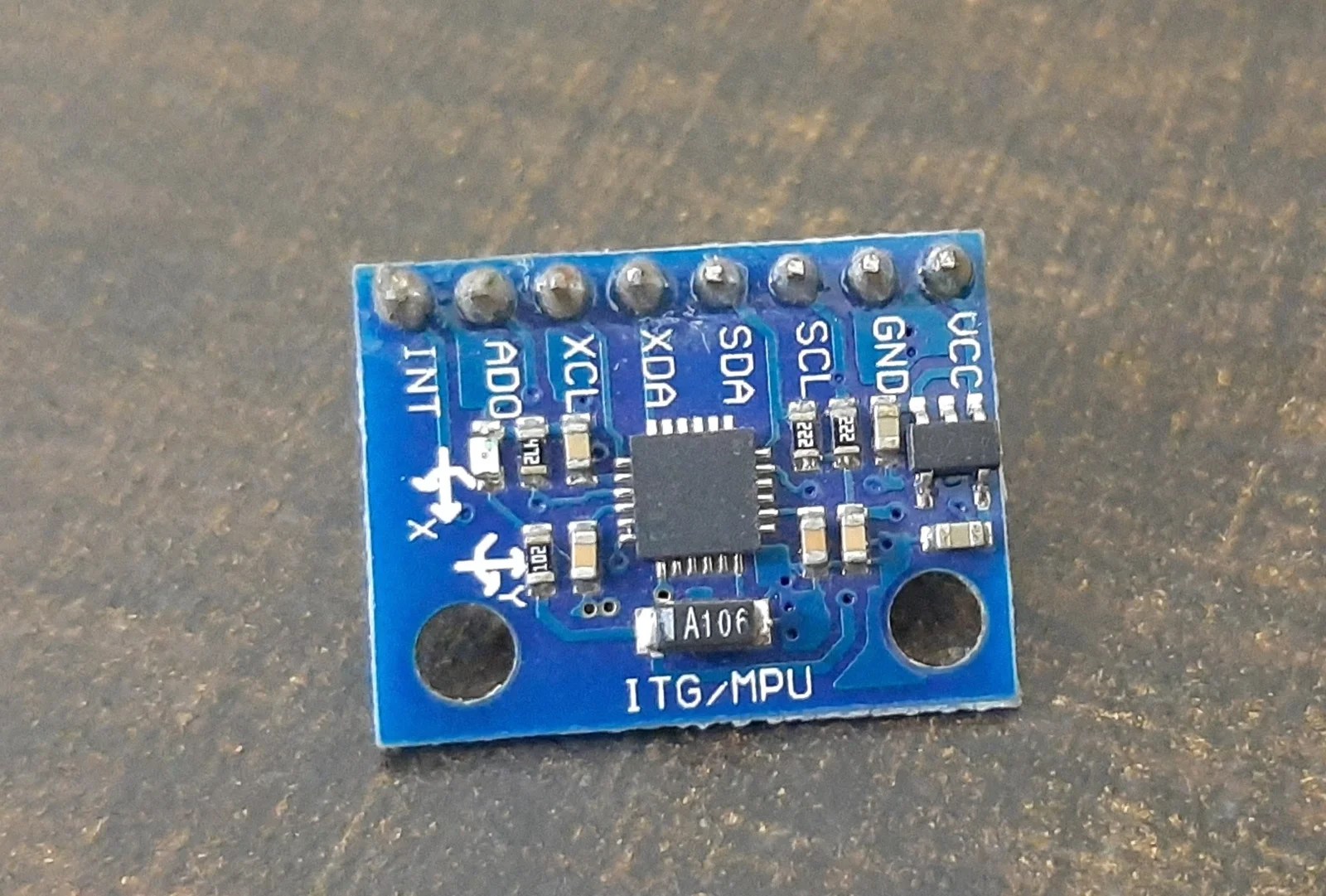
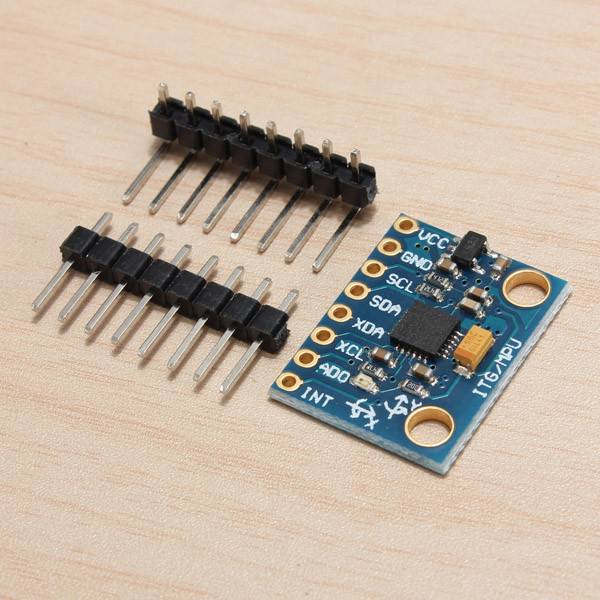
Акселерометр и гироскоп MPU-6050 3-х осевой гироскоп + акселерометр.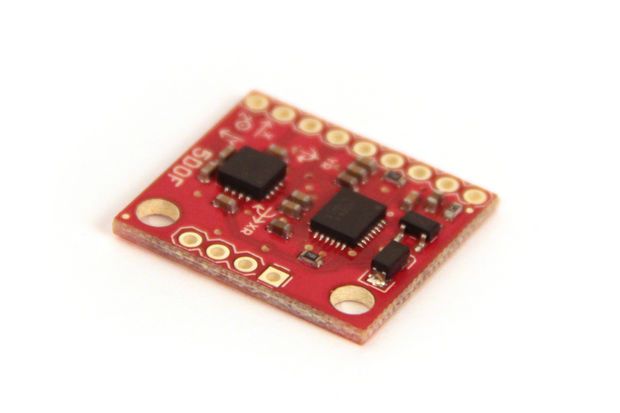 Модуль на микросхеме MPU-6050 это 3-осевой гироскоп и акселерометр на три координаты. На плате модуля размещены все необходимые для ее надежного функционирования, в том числе и подтягивающие резисторы. Обмен данными с контроллером осуществляется по шине I2C. Необходимое напряжение питания для модуля MPU-6050 регулирует встроенный стабиллизатор напряжения 3,3V. Сердцем модуля является микросхема MPU-6050. Можно использовать с любми микропроцессорными системами — MCU/ARM/PIC/AVR/MSP430/PLC/STM32/Arduino.
Модуль на микросхеме MPU-6050 это 3-осевой гироскоп и акселерометр на три координаты. На плате модуля размещены все необходимые для ее надежного функционирования, в том числе и подтягивающие резисторы. Обмен данными с контроллером осуществляется по шине I2C. Необходимое напряжение питания для модуля MPU-6050 регулирует встроенный стабиллизатор напряжения 3,3V. Сердцем модуля является микросхема MPU-6050. Можно использовать с любми микропроцессорными системами — MCU/ARM/PIC/AVR/MSP430/PLC/STM32/Arduino.
Технические характеристики
- Напряжение питания: 3-5 В
- Связь: I²C протокол
- Встроенный 16-битный АЦП интерфейс обмена данных
- Диапазон измерений гироскопа: ±250/500/1000/2000 °/с
- Диапазон измерений акселерометра: ±2/4/8/16 g
- Шаг между контактами: 2.54 мм
- Размер платы: 2 х 1.6 см
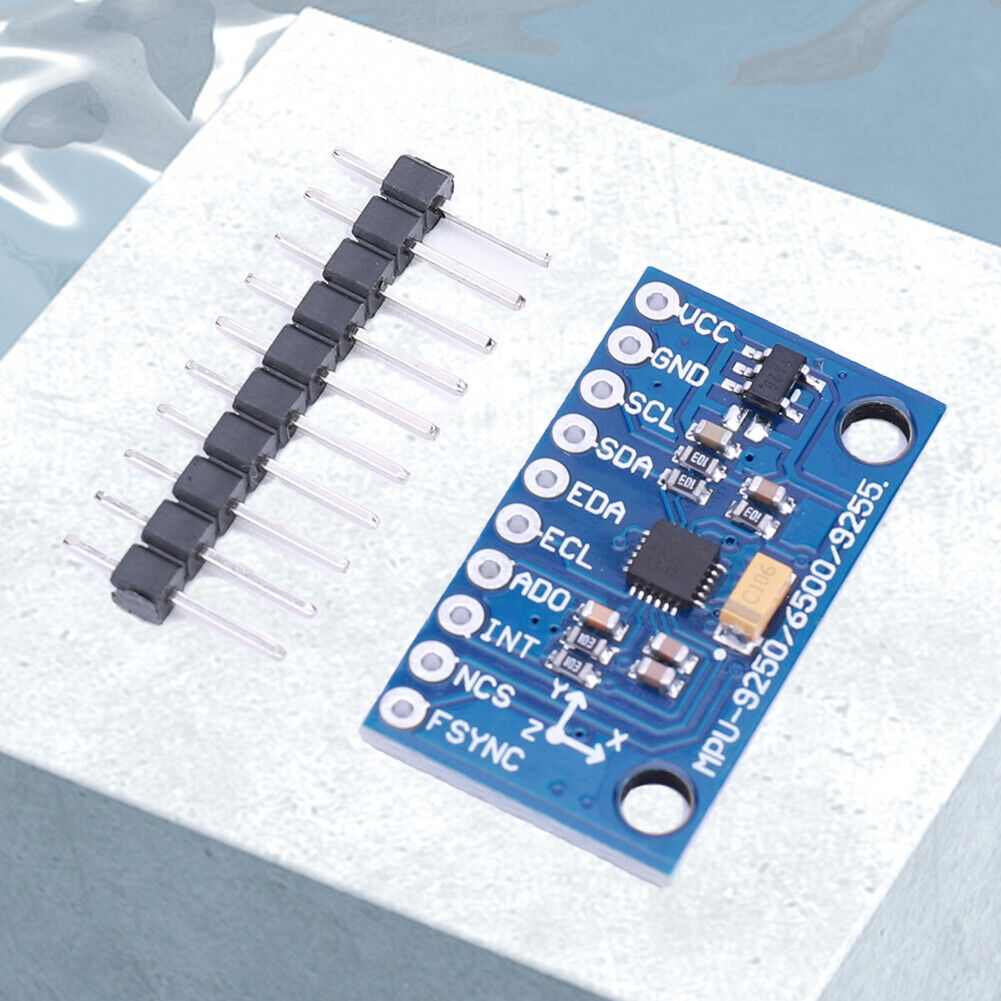
* в комплекте пара контактов (прямой и изогнутый)
Дополнительно
| Материал корпуса | Пластик + металл |
| Совместимость | Windows |
| Страна регистрации бренда | Китай |
| Страна-производитель товара | Китай |
| Тип | Аксессуары для Роботов |
 org/PropertyValue»>
org/PropertyValue»>
Комментарии
0Пока не было комментариев.
Прокомментировать
Уважаемые покупатели!
|
 На период войны с россией – предоставляем скидки 10% для покупок на военные нужды.
На период войны с россией – предоставляем скидки 10% для покупок на военные нужды.MPU6050 Высокочастотный акселерометр и гироскоп Arduino для сохранения данных — Портал производителя
«Как участник программы Amazon Associates, переход по ссылкам может привести к тому, что Maker Portal получит небольшую комиссию, которая поможет поддержать будущие проекты».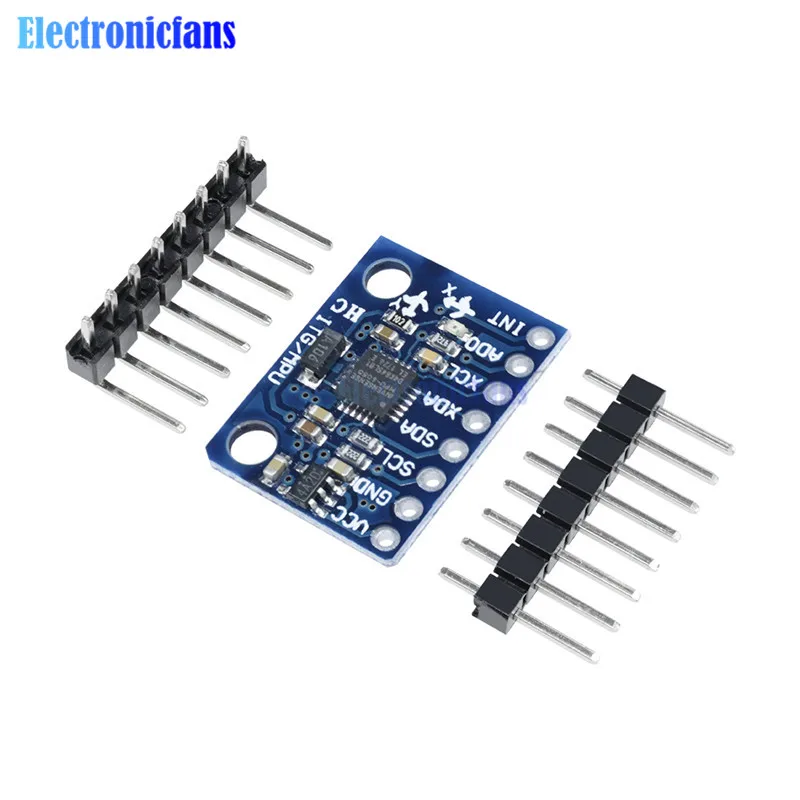
Введение
Список деталей Arduino и проводка
Получение и понимание данных MPU6050
Калибровка и смещение MPU6050
Заключение
MPU6050 — это акселерометр и гироскоп с 6 степенями свободы, предназначенный для недорогого, мелкомасштабного и эффективного приближения движения. Акселерометры и гироскопы используются в смартфонах для определения ориентации, анализа вибрации в транспортных средствах и машинах и даже для стабилизации камеры и отслеживания движения. Существует бесчисленное множество приложений для акселерометров и гироскопов, и с такими доступными устройствами, как MPU6050, мы действительно можем проверить пределы технологии.
MPU6050 имеет три 16-разрядных аналого-цифровых преобразователя (АЦП) для оцифровки выходных сигналов гироскопа и три 16-разрядных АЦП для оцифровки выходных сигналов акселерометра. Для этого конкретного руководства диапазон гироскопа составляет ±250°/сек, а диапазон акселерометра — ±2g. MPU6050 использует последовательную связь I2C, которую можно подключить с помощью контактов A4/A5 (SDA/SCL) на плате Arduino Uno.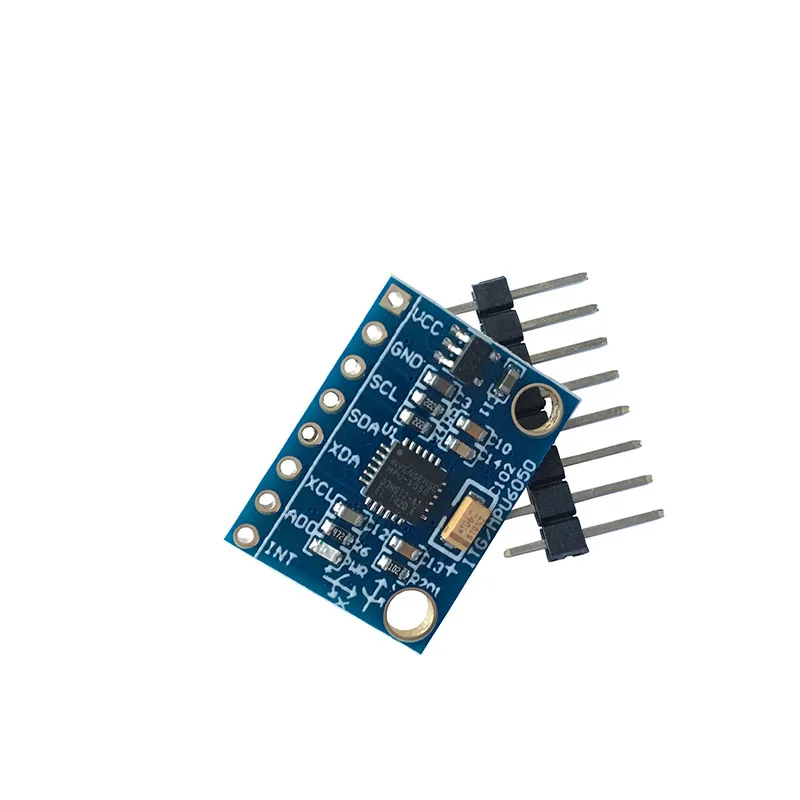
Список деталей и проводка Arduino
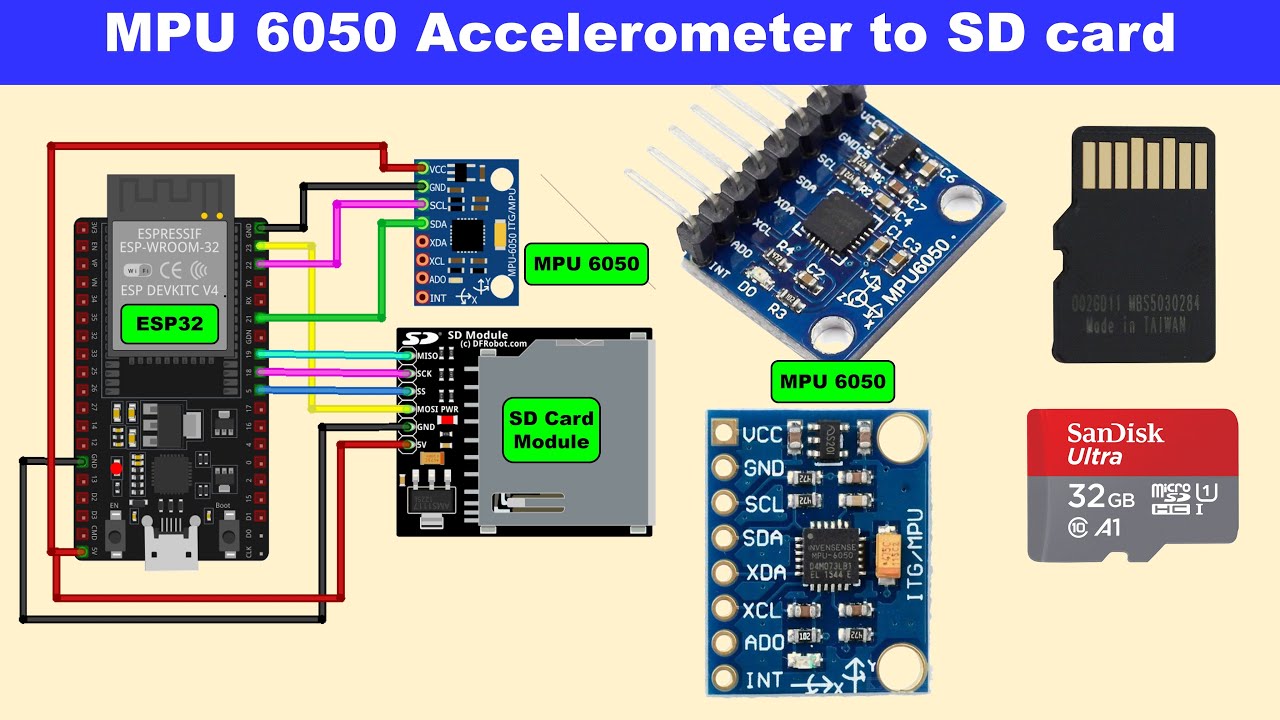
Плата Arduino Uno будет использоваться в качестве контроллера для получения данных от MPU6050 на высоких скоростях. Модуль SD также будет использоваться для сохранения данных в режиме реального времени для анализа и постобработки. Это сделает анализ более гибким, а также позволит использовать портативные приложения, такие как отслеживание и анализ вибрации (что было бы очень сложно с платой Arduino). Детали, необходимые для воспроизведения экспериментов в этом руководстве, перечислены ниже:
-
Arduino Uno — $13.00 [Our Store]
-
MPU6050 Accelerometer + Gyroscope — $7.00 [Our Store]
-
SD Module — $8.
 00 [Our Store]
00 [Our Store] -
16 GB SD Card + USB Reader — 10,00 $ [Наш магазин]
-
3,7 В LiPo аккумулятор — 18,99 $ (4 шт. + зарядное устройство) [Amazon]
-
Повышающий преобразователь 3,7 В в 5 В — 7,99 $ (2 шт.) [Amazon]
- Mini $3.00 [Наш магазин]
-
Соединительные провода — 5,99 долл. США (120 шт.) [Amazon]
-
Комплект Raspberry Pi 3B+ — 48,99 долл. США [Amazon]
MPU6050 Акселерометр и гироскоп с 6 степенями свободы (совместимость с Arduino и Raspberry Pi)
8,00 $
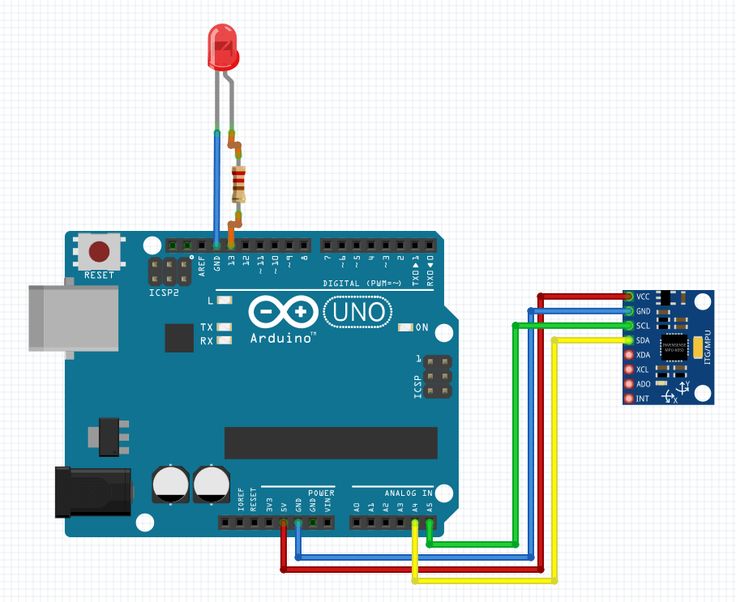
Проводка для экспериментов, проведенных в этом руководстве, очень минимальна и использует проводку I2C для акселерометра и гироскопа, а также проводку SPI для модуля SD-карты. . Схема подключения приведена ниже:
Таблица проводки также приведена ниже:
Одно замечание относительно проводки: проводка Arduino-to-Arduino от 5 В до контакта D3 используется для того, чтобы сообщить программе, когда начинать (ВЫСОКИЙ) и останавливать (НИЗКИЙ) запись. Это важно, потому что у нас не будет другого способа уведомить программу о запуске и остановке. Подтягивающий резистор будет использоваться на контакте D3 для ограничения входной мощности на этот контакт. В остальном разводка традиционна и ожидаема для MPU6050 (I2C) и SD-модуля (SPI). Модуль SD требует 5 В, поэтому мы используем повышающий преобразователь 3,7 В в 5 В LiPo. Светодиод предназначен для уведомлений о сборе данных и их обработке — это будет обсуждаться в следующем разделе.
Это важно, потому что у нас не будет другого способа уведомить программу о запуске и остановке. Подтягивающий резистор будет использоваться на контакте D3 для ограничения входной мощности на этот контакт. В остальном разводка традиционна и ожидаема для MPU6050 (I2C) и SD-модуля (SPI). Модуль SD требует 5 В, поэтому мы используем повышающий преобразователь 3,7 В в 5 В LiPo. Светодиод предназначен для уведомлений о сборе данных и их обработке — это будет обсуждаться в следующем разделе.
Получение и понимание данных MPU6050
Arduino Uno будет использоваться для получения данных ускорения и гироскопа от MPU6050. Ниже приведена программа Arduino, которая автоматически получает данные от MPU6050 с частотой дискретизации 500 Гц и сохраняет их на SD-карту. Код сбора данных основан на библиотеке SDFat и коде регистратора с малой задержкой MPU6050, за исключением того, что я вырезал раздел пользовательского интерфейса, что позволяет нам использовать код переносимым образом.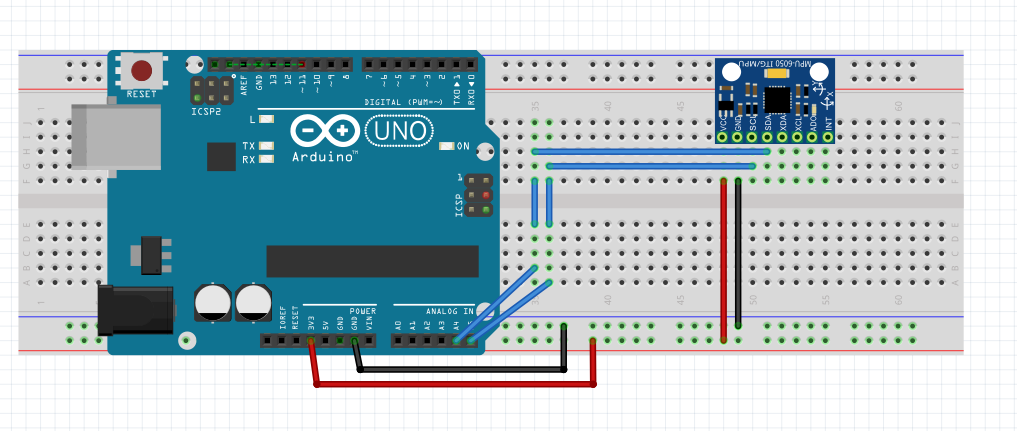 Чтобы использовать код, необходимо загрузить библиотеку SDFat в Arduino IDE:
Чтобы использовать код, необходимо загрузить библиотеку SDFat в Arduino IDE:
Полный код (более 500 строк!) приведен ниже:
Нечего сказать о коде, не написав целый пост об используемых в нем методах. Поэтому я оставляю анализ кода пользователю. Большинство из них не мои, скорее они были разработаны ребятами из SDFat, так что именно в этой степени я буду их исследовать. Однако я продолжу обсуждение уведомлений и выходных данных кода, которые будут необходимы для получения и анализа данных.
Общий процесс, за которым следует код, выглядит следующим образом:
Следующая последовательность должна быть для получения данных:
-
Установите PIN 3 LOW
-
Включите Arduino с батареей LiPo
- 90 ВЫСОКИЙ (получение данных)
-
PIN 3 НИЗКИЙ (преобразование данных в .csv)
-
Подождите, пока светодиод перестанет мигать и станет НИЗКИМ
-
Выключение питания Arduino
- 0005
ПРИМЕЧАНИЕ.

Светодиод может мигать столько же времени, сколько и время сбора данных. Arduino работает на максимально возможной частоте во время сбора данных, поэтому преобразование может быть длительным из-за высокой частоты дискретизации (500 Гц). Если MPU6050 собирает данные в течение десяти минут, преобразование может занять столько же времени, поэтому терпение является ключевым фактором.
Теперь мы готовы анализировать данные!
Выходной файл должен называться следующим образом:
mpu6050a00.csv
, где последние две цифры имени файла увеличиваются по мере создания большего количества файлов на одной SD-карте. Как только SD-карта вставлена в настольный компьютер через USB-накопитель, мы можем открыть один из файлов с помощью программы Python. Пример скрипта Python для этого приведен ниже:
Если MPU6050 не перемещается и остается на своей горизонтальной оси (с осью z, направленной к земле — в направлении силы тяжести), мы должны увидеть результат, аналогичный показанному ниже (построенному с использованием приведенного выше кода):
На рисунке видно, как направление z показывает 1 (указывая на то, что оно постоянно испытывает эффект гравитации). Остальные ускорения близки к нулю. Все значения x,y,z гироскопа равны нулю, потому что мы вообще не вращали устройство. Ближе к 13-секундной отметке на графике мы видим некоторое возмущение, которое является результатом переключения вывода сбора данных с LOW на HIGH и небольшого нарушения модуля. Ниже MPU6050 будет вращаться для проверки и идентификации каждой оси акселерометра и гироскопа, что даст нам лучшее представление о том, как работают данные оси.
Остальные ускорения близки к нулю. Все значения x,y,z гироскопа равны нулю, потому что мы вообще не вращали устройство. Ближе к 13-секундной отметке на графике мы видим некоторое возмущение, которое является результатом переключения вывода сбора данных с LOW на HIGH и небольшого нарушения модуля. Ниже MPU6050 будет вращаться для проверки и идентификации каждой оси акселерометра и гироскопа, что даст нам лучшее представление о том, как работают данные оси.
Калибровка и смещение MPU6050
После получения данных акслерометра и гироскопа мы должны создать метод смещения или калибровки, чтобы обеспечить правильное отслеживание ускорений и гироскопических движений с учетом физического мира. Наилучший метод смещения данных MPU6050 — предположить, что устройство запускается в состоянии покоя (что является хорошим предположением для пользователей, которые знают об этом). Следовательно, используя приведенные выше данные, мы можем компенсировать данные, вычитая неподвижные данные (я усредняю по нескольким точкам) из остальных данных.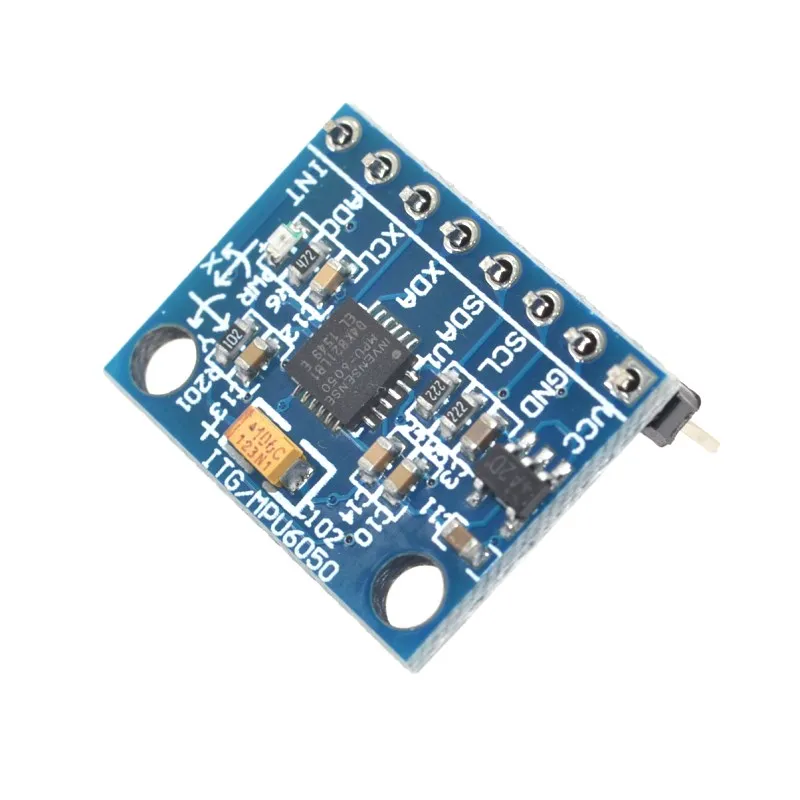 Мы также должны принять во внимание гравитационное влияние и направление гравитации (направление z в нашем случае, предполагая, что оно добавляется к 1).
Мы также должны принять во внимание гравитационное влияние и направление гравитации (направление z в нашем случае, предполагая, что оно добавляется к 1).
Теперь мы ожидаем, что все точки в начале графика данных будут центрированы относительно нуля:
Код смещения включен в приведенный ниже код Python:
Теперь мы можем начать анализ данных акселерометра и гироскопа. Будут изучены лучшие методы смещения и калибровки данных акселерометра, но в настоящее время нам необходимо получить более значимые данные и проанализировать ускорение и вращение с использованием соответствующих алгоритмов и более сложной математики.
Мы можем начать с проведения следующего эксперимента:
-
Кратковременно поверните и удерживайте MPU6050 по каждой из его осей (x, y и z) — это обеспечит лучший расчет смещения относительно силы тяжести
-
Поверните MPU6050 по часовой стрелке, а затем против часовой стрелки по каждой оси — это позволит нам определить угол поворота гироскопа
Результирующие выходные данные должны выглядеть следующим образом:
Это может показаться немного беспорядочным, но повороты и результирующие ускорения и углы дают нам информацию, необходимую для полной калибровки сенсора.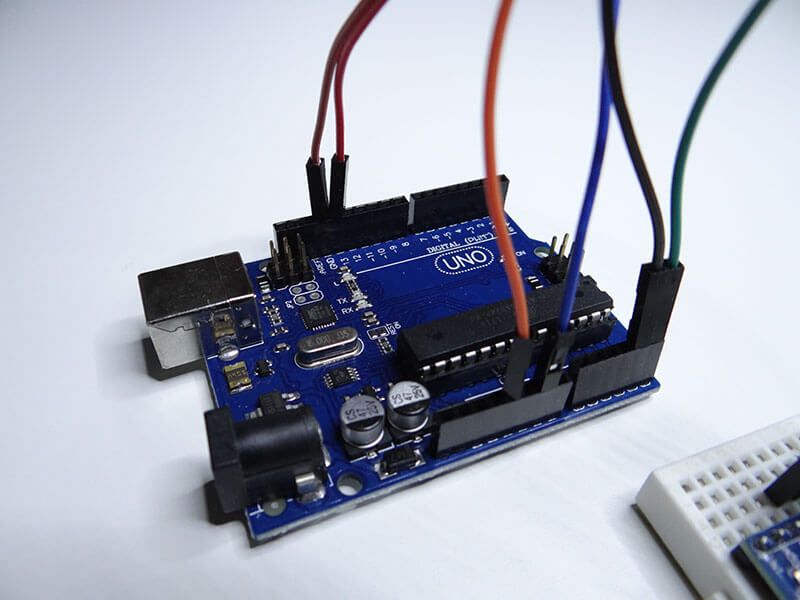
Во-первых, мы видим, что ускорения силы тяжести не совсем равны 1 в каждом направлении, а это означает, что наш датчик, вероятно, слегка наклонен. Это не проблема, поскольку мы можем внести поправку на это в предположении однородного поля гравитации (точно на Земле в стационарном положении). Мы можем сделать это, выбрав устойчивый участок во время вращения каждой оси в направлении силы тяжести, а затем найдя дефицит гравитационного ускорения для каждой оси.
Заключение и продолжение
Акселерометр и гироскоп MPU6050 с 6 степенями свободы были представлены и исследованы с использованием Arduino в качестве высокоскоростной системы сбора данных. Модуль SD использовался для сохранения информации об ускорении и гироскопе с частотой 500 Гц (с платой Arduino Uno). Я представил простой метод подключения для получения инерциальных измерений с 6 степенями свободы, которые позже были проанализированы с помощью программы Python. С Python мы смогли прочитать информацию об акселерометре и гироскопе, используя библиотеку чтения csv. Затем инерциальные данные были нанесены на график для визуализации и смещения с использованием метода калибровки, использующего ускорение под действием силы тяжести (для значений смещения акселерометра). В этом руководстве просто представлен датчик MPU6050 с 6 степенями свободы, который будет более подробно описан в следующей статье анализа с использованием Python.
Затем инерциальные данные были нанесены на график для визуализации и смещения с использованием метода калибровки, использующего ускорение под действием силы тяжести (для значений смещения акселерометра). В этом руководстве просто представлен датчик MPU6050 с 6 степенями свободы, который будет более подробно описан в следующей статье анализа с использованием Python.
Ссылка на эту страницу:
См. больше в Датчики и Python:
Arduino, анализ данных, инженерия, программированиеДжошуа Хриско Акселерометр, MPU6050, гироскоп, гироскоп, акселерометр, акселерометр Arduino, акселерометр MEMS, MEMS, MEMS Accel, Arduino MEMS, емкостный акселерометр MEMS, данные, анализ данных, Python Анализ данных, Акселерометр Python, Гироскоп Python, Анализ Python, Python, I2C, Угол, Arduino MPU6050, Arduino Accel, Python Serial, Pyserial, pyserial, Inclimometer, IMU, Инерциальная измерительная единица, Maker, IMU Maker, MPU6050 IMU8 Комментарии
0 лайковПоставщики беспроводных радиочастот и ресурсы
Веб-сайт RF Wireless World является домом для поставщиков и ресурсов RF и Wireless.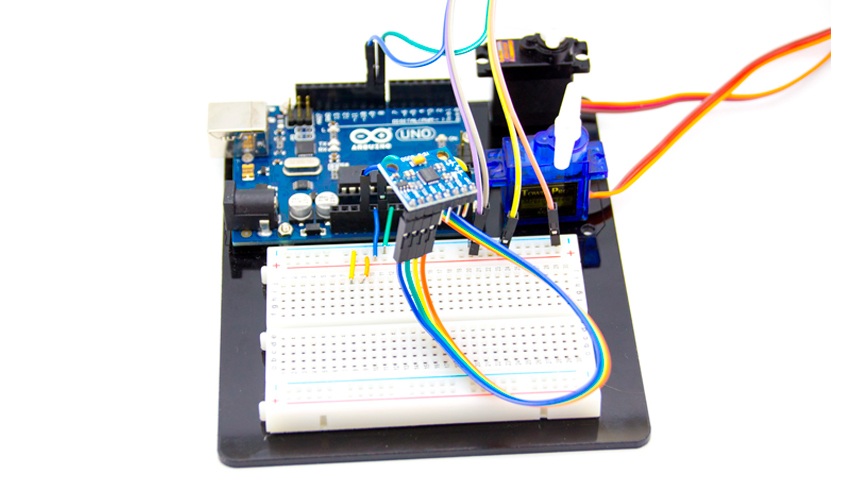 На сайте представлены статьи, учебные пособия, поставщики, терминология, исходный код (VHDL, Verilog, MATLAB, Labview), тесты и измерения,
калькуляторы, новости, книги, загрузки и многое другое.
На сайте представлены статьи, учебные пособия, поставщики, терминология, исходный код (VHDL, Verilog, MATLAB, Labview), тесты и измерения,
калькуляторы, новости, книги, загрузки и многое другое.
Сайт RF Wireless World охватывает ресурсы по различным темам, таким как RF, беспроводная связь, vsat, спутник, радар, оптоволокно, микроволновая печь, wimax, wlan, zigbee, LTE, 5G NR, GSM, GPRS, GPS, WCDMA, UMTS, TDSCDMA, Bluetooth, Lightwave RF, z-wave, Интернет вещей (IoT), M2M, Ethernet и т. д. Эти ресурсы основаны на стандартах IEEE и 3GPP. Он также имеет академический раздел, который охватывает колледжи и университеты по инженерным дисциплинам и дисциплинам MBA.
Статьи о системах на основе IoT
Система обнаружения падения для пожилых людей на основе IoT : В статье рассматривается архитектура системы обнаружения падения для пожилых людей.
В нем упоминаются преимущества или преимущества системы обнаружения падения IoT.
Подробнее➤
См. также другие статьи о системах на основе IoT:
• Система очистки туалетов AirCraft.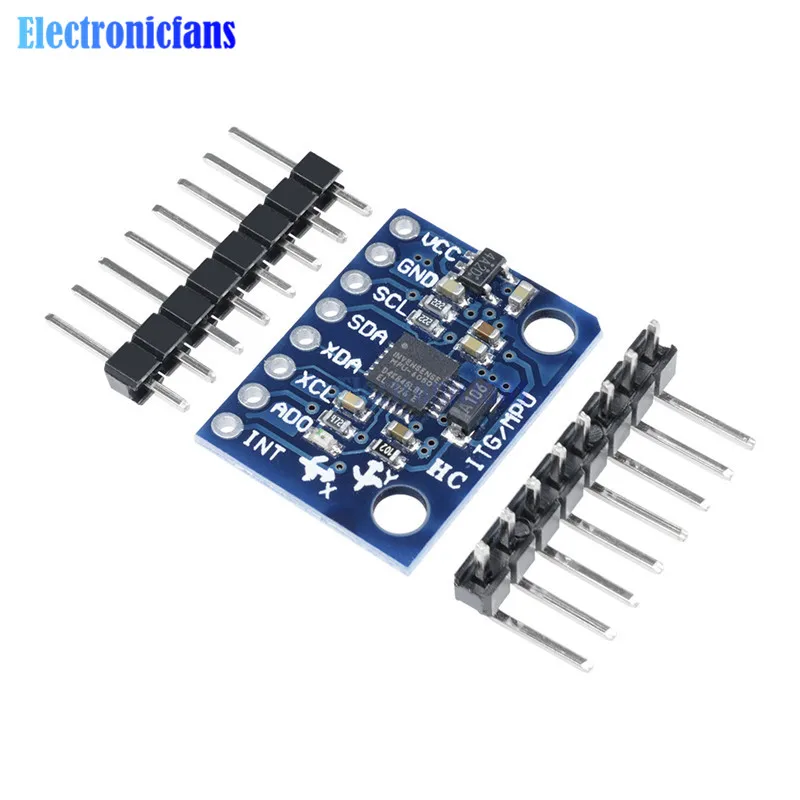 • Система измерения удара при столкновении
• Система отслеживания скоропортящихся продуктов и овощей
• Система помощи водителю
• Система умной розничной торговли
• Система мониторинга качества воды
• Система интеллектуальной сети
• Умная система освещения на основе Zigbee
• Умная система парковки на базе Zigbee
• Умная система парковки на базе LoRaWAN.
• Система измерения удара при столкновении
• Система отслеживания скоропортящихся продуктов и овощей
• Система помощи водителю
• Система умной розничной торговли
• Система мониторинга качества воды
• Система интеллектуальной сети
• Умная система освещения на основе Zigbee
• Умная система парковки на базе Zigbee
• Умная система парковки на базе LoRaWAN.
Беспроводные радиочастотные изделия
Этот раздел статей охватывает статьи о физическом уровне (PHY), уровне MAC, стеке протоколов и сетевой архитектуре на основе WLAN, WiMAX, zigbee, GSM, GPRS, TD-SCDMA, LTE, 5G NR, VSAT, Gigabit Ethernet на основе IEEE/3GPP и т. д. , стандарты. Он также охватывает статьи, связанные с испытаниями и измерениями, посвященные испытаниям на соответствие, используемым для испытаний устройств на соответствие RF/PHY. СМ. УКАЗАТЕЛЬ СТАТЕЙ >>.
Физический уровень 5G NR : Обработка физического уровня для канала 5G NR PDSCH и канала 5G NR PUSCH была рассмотрена поэтапно.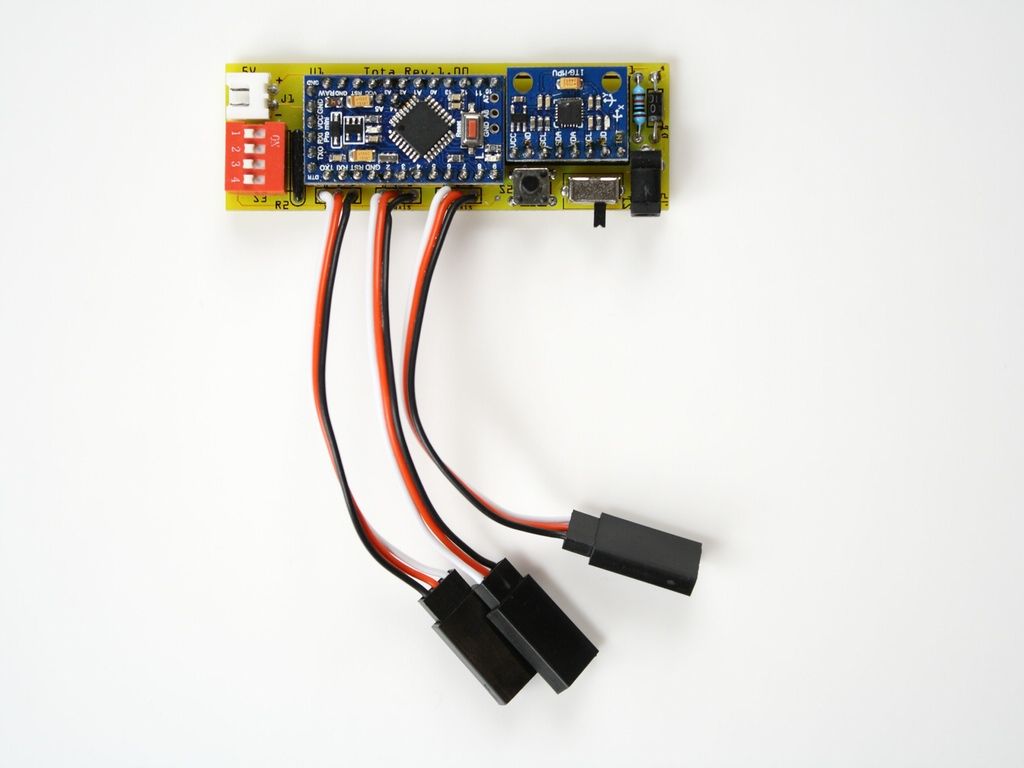 Это описание физического уровня 5G соответствует спецификациям физического уровня 3GPP.
Подробнее➤
Это описание физического уровня 5G соответствует спецификациям физического уровня 3GPP.
Подробнее➤
Основные сведения о повторителях и типы повторителей : В нем объясняются функции различных типов повторителей, используемых в беспроводных технологиях. Подробнее➤
Основы и типы замираний : В этой статье рассматриваются маломасштабные замирания, крупномасштабные замирания, медленные замирания, быстрые замирания и т. д., используемые в беспроводной связи. Подробнее➤
Архитектура сотового телефона 5G : В этой статье рассматривается блок-схема сотового телефона 5G с внутренними модулями 5G. Архитектура сотового телефона. Подробнее➤
Основы помех и типы помех: В этой статье рассматриваются помехи по соседнему каналу, помехи в Электромагнитные помехи, ICI, ISI, световые помехи, звуковые помехи и т. д. Подробнее➤
Раздел 5G NR
В этом разделе рассматриваются функции 5G NR (новое радио), нумерология, диапазоны, архитектура, развертывание, стек протоколов (PHY, MAC, RLC, PDCP, RRC) и т. д.
5G NR Краткий справочный указатель >>
д.
5G NR Краткий справочный указатель >>
• Мини-слот 5G NR
• Часть полосы пропускания 5G NR
• БАЗОВЫЙ НАБОР 5G NR
• Форматы 5G NR DCI
• 5G NR UCI
• Форматы слотов 5G NR
• IE 5G NR RRC
• 5G NR SSB, SS, PBCH
• 5G NR PRACH
• 5G NR PDCCH
• 5G NR PUCCH
• Опорные сигналы 5G NR
• 5G NR m-Sequence
• Золотая последовательность 5G NR
• 5G NR Zadoff Chu Sequence
• Физический уровень 5G NR
• MAC-уровень 5G NR
• Уровень 5G NR RLC
• Уровень PDCP 5G NR
Руководства по беспроводным технологиям
В этом разделе рассматриваются учебные пособия по радиочастотам и беспроводным сетям. Он охватывает учебные пособия по таким темам, как сотовая связь, WLAN (11ac, 11ad), wimax, bluetooth, zigbee, zwave, LTE, DSP, GSM, GPRS, GPS, UMTS, CDMA, UWB, RFID, радар, VSAT, спутник, беспроводная сеть, волновод, антенна, фемтосота, тестирование и измерения, IoT и т. д. См. ИНДЕКС УЧЕБНЫХ ПОСОБИЙ >>
Учебное пособие по 5G — В этом учебном пособии по 5G также рассматриваются следующие подтемы, посвященные технологии 5G:
Учебник по основам 5G
Диапазоны частот
учебник по миллиметровым волнам
Рамка волны 5G мм
Зондирование канала миллиметровых волн 5G
4G против 5G
Испытательное оборудование 5G
Архитектура сети 5G
Сетевые интерфейсы 5G NR
звучание канала
Типы каналов
5G FDD против TDD
Нарезка сети 5G NR
Что такое 5G NR
Режимы развертывания 5G NR
Что такое 5G ТФ
В этом учебнике по GSM рассматриваются основы GSM, сетевая архитектура, сетевые элементы, системные спецификации, приложения,
Типы пакетов GSM, структура кадров GSM или иерархия кадров, логические каналы, физические каналы,
Физический уровень GSM или обработка речи, вход в сеть мобильного телефона GSM или настройка вызова или процедура включения питания,
Вызов MO, вызов MT, модуляция VAMOS, AMR, MSK, GMSK, физический уровень, стек протоколов, основы мобильного телефона,
Планирование RF, нисходящая линия связи PS и восходящая линия связи PS.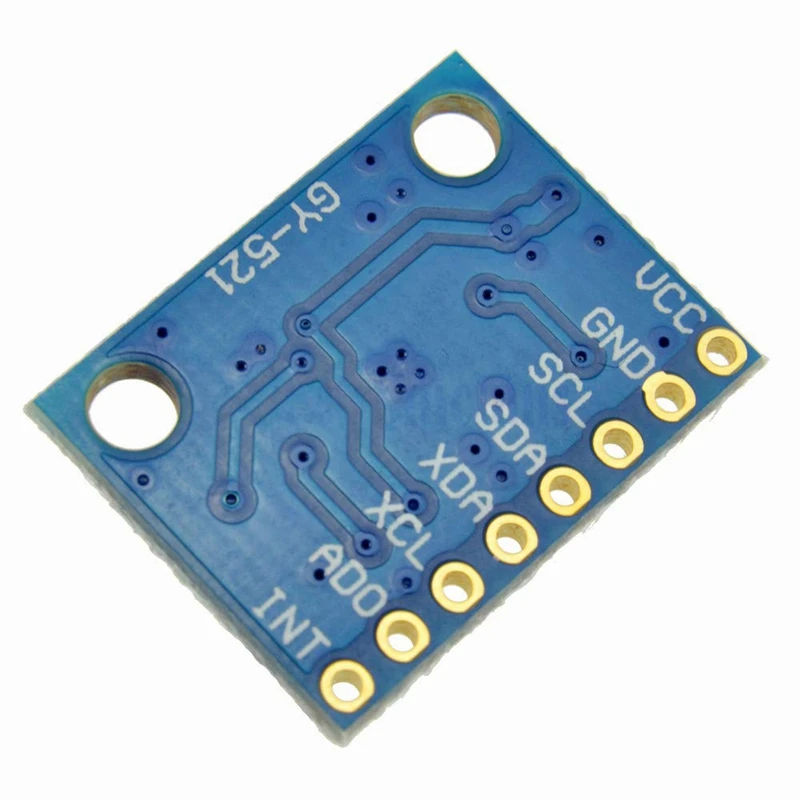
➤Читать дальше.
LTE Tutorial , описывающий архитектуру системы LTE, включая основы LTE EUTRAN и LTE Evolved Packet Core (EPC). Он предоставляет ссылку на обзор системы LTE, радиоинтерфейс LTE, терминологию LTE, категории LTE UE, структуру кадра LTE, физический уровень LTE, Стек протоколов LTE, каналы LTE (логические, транспортные, физические), пропускная способность LTE, агрегация несущих LTE, Voice Over LTE, расширенный LTE, Поставщики LTE и LTE vs LTE advanced.➤Подробнее.
Радиочастотные технологии Материалы
На этой странице мира беспроводных радиочастот описывается пошаговое проектирование преобразователя частоты на примере повышающего преобразователя частоты 70 МГц в диапазон C.
для микрополосковой платы с использованием дискретных радиочастотных компонентов, а именно. Смесители, гетеродин, MMIC, синтезатор, опорный генератор OCXO,
амортизирующие прокладки. ➤Читать дальше.
➤ Проектирование и разработка радиочастотного приемопередатчика
➤Дизайн радиочастотного фильтра
➤Система VSAT
➤Типы и основы микрополосковых
➤Основы волновода
Секция испытаний и измерений
В этом разделе рассматриваются ресурсы по контролю и измерению, контрольно-измерительное оборудование для тестирования тестируемых устройств на основе
Стандарты WLAN, WiMAX, Zigbee, Bluetooth, GSM, UMTS, LTE.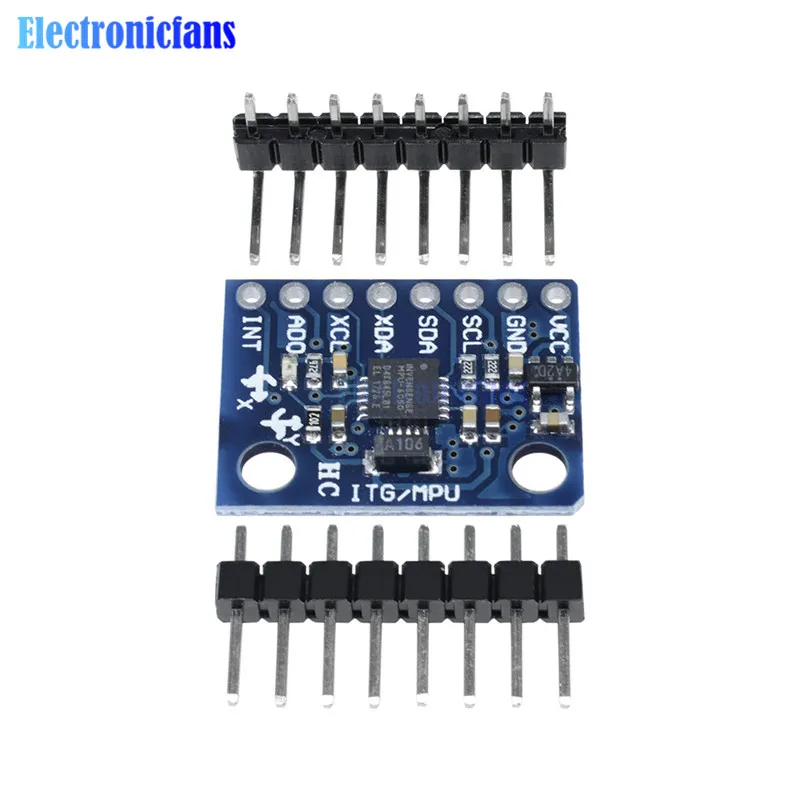 ИНДЕКС испытаний и измерений >>
ИНДЕКС испытаний и измерений >>
➤Система PXI для контрольно-измерительных приборов.
➤ Генерация и анализ сигналов
➤ Измерения физического уровня
➤ Тестирование устройства WiMAX на соответствие
➤ Тест на соответствие Zigbee
➤ Тест на соответствие LTE UE
➤ Тест на соответствие TD-SCDMA
Волоконно-оптические технологии
Волоконно-оптический компонент основы, включая детектор, оптический соединитель, изолятор, циркулятор, переключатели, усилитель,
фильтр, эквалайзер, мультиплексор, разъемы, демультиплексор и т. д. Эти компоненты используются в оптоволоконной связи.
ИНДЕКС оптических компонентов >>
➤Руководство по оптоволоконной связи
➤APS в SDH
➤Основы SONET
➤ Структура кадра SDH
➤ SONET против SDH
Поставщики беспроводных радиочастотных устройств, производители
Сайт RF Wireless World охватывает производителей и поставщиков различных радиочастотных компонентов, систем и подсистем для ярких приложений,
см. ИНДЕКС поставщиков >>.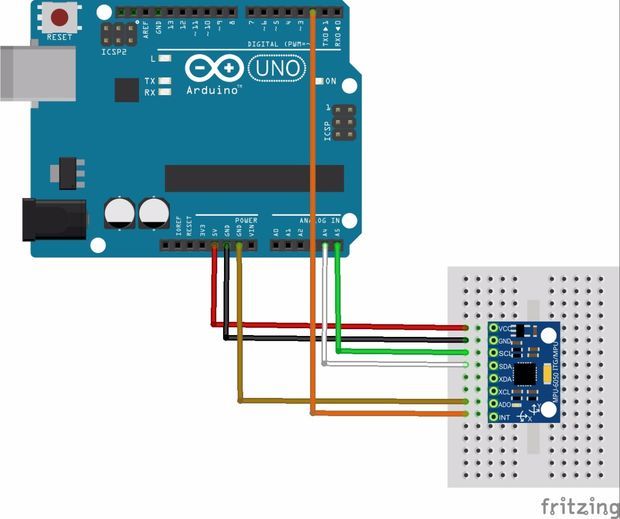
Поставщики ВЧ-компонентов, включая ВЧ-изолятор, ВЧ-циркулятор, ВЧ-смеситель, ВЧ-усилитель, ВЧ-адаптер, ВЧ-разъем, ВЧ-модулятор, ВЧ-трансивер, PLL, VCO, синтезатор, антенну, осциллятор, делитель мощности, сумматор мощности, фильтр, аттенюатор, диплексер, дуплексер, чип-резистор, чип-конденсатор, чип-индуктор, ответвитель, ЭМС, программное обеспечение RF Design, диэлектрический материал, диод и т. д.
Поставщики радиочастотных компонентов >>
➤Базовая станция LTE
➤ РЧ-циркулятор
➤РЧ-изолятор
➤Кристаллический осциллятор
MATLAB, Labview, Embedded Исходные коды
Раздел исходного кода RF Wireless World охватывает коды, связанные с языками программирования MATLAB, VHDL, VERILOG и LABVIEW.
Эти коды полезны для новичков в этих языках.
СМОТРИТЕ ИНДЕКС ИСТОЧНИКОВ КОДА >>
➤ 3–8 код декодера VHDL
➤Скремблер-дескремблер Код MATLAB
➤32-битный код ALU Verilog
➤ T, D, JK, SR коды лаборатории триггеров
*Общая медицинская информация*
Сделайте эти пять простых вещей, чтобы помочь остановить коронавирус (COVID-19).
СДЕЛАЙТЕ ПЯТЬ
1. РУКИ: Мойте их чаще
2. ЛОКОТЬ: кашляйте в него
3. ЛИЦО: Не прикасайтесь к нему
4. НОГИ: Держитесь на расстоянии более 3 футов (1 м) друг от друга
5. ЧУВСТВУЙТЕ: Болен? Оставайтесь дома
Используйте технологию отслеживания контактов >> , следуйте рекомендациям по социальному дистанцированию >> и установить систему наблюдения за данными >> спасти сотни жизней. Использование концепции телемедицины стало очень популярным в таких стран, как США и Китай, чтобы остановить распространение COVID-19так как это заразное заболевание.
Радиочастотные калькуляторы и преобразователи
Раздел «Калькуляторы и преобразователи» охватывает ВЧ-калькуляторы, беспроводные калькуляторы, а также преобразователи единиц измерения.
Они охватывают беспроводные технологии, такие как GSM, UMTS, LTE, 5G NR и т. д.
СМ. КАЛЬКУЛЯТОРЫ Указатель >>.
➤ Калькулятор пропускной способности 5G NR
➤ 5G NR ARFCN и преобразование частоты
➤ Калькулятор скорости передачи данных LoRa
➤ LTE EARFCN для преобразования частоты
➤ Калькулятор антенны Yagi
➤ Калькулятор времени выборки 5G NR
IoT-Интернет вещей Беспроводные технологии
В разделе, посвященном IoT, рассматриваются беспроводные технологии Интернета вещей, такие как WLAN, WiMAX, Zigbee, Z-wave, UMTS, LTE, GSM, GPRS, THREAD, EnOcean, LoRa, SIGFOX, WHDI, Ethernet,
6LoWPAN, RF4CE, Bluetooth, Bluetooth с низким энергопотреблением (BLE), NFC, RFID, INSTEON, X10, KNX, ANT+, Wavenis, Dash7, HomePlug и другие.