Какие основные различия между гироскопом и акселерометром. Как устроены и работают эти инерционные датчики. Для чего применяются гироскопы и акселерометры в современных устройствах. Какие преимущества дает использование гироскопов по сравнению с акселерометрами.
Акселерометр: принцип работы и характеристики
Акселерометр — это инерционный датчик, предназначенный для измерения проекции кажущегося ускорения. Название происходит от латинских слов «accelero» (ускоряю) и «metreo» (измеряю).
Простейшая модель акселерометра представляет собой груз на пружине. При воздействии ускорения груз смещается, сжимая или растягивая пружину. По величине этого смещения можно определить величину действующего ускорения.
В мобильных устройствах акселерометры реагируют на изменение вектора ускорения свободного падения. На основе этих данных определяется ориентация устройства в пространстве.
Ключевые характеристики акселерометров:
- Измеряют линейное ускорение
- Реагируют на силу тяжести
- Позволяют определить наклон устройства
- Имеют относительно низкую точность измерения угла поворота
Гироскоп: принцип действия и особенности
Гироскоп — это устройство, способное измерять угловую скорость. Название ввел Леон Фуко для прибора, с помощью которого он наблюдал вращение Земли.
Классический механический гироскоп представляет собой быстро вращающееся твердое тело, ось которого может менять направление в пространстве. При этом ось сохраняет неизменное положение независимо от движения основания.
В современной электронике применяются микромеханические вибрационные гироскопы — датчики угловой скорости (ДУС). Их принцип действия основан на возникновении силы Кориолиса при попытке поворота чувствительного элемента.
Основные характеристики гироскопов:
- Измеряют угловую скорость вращения
- Не зависят от силы тяжести
- Позволяют точно определить угол поворота устройства
- Обеспечивают высокую точность измерений
Сравнение гироскопа и акселерометра
Хотя оба устройства относятся к инерционным датчикам, между ними есть существенные различия:
| Параметр | Акселерометр | Гироскоп |
|---|---|---|
| Измеряемая величина | Линейное ускорение | Угловая скорость |
| Зависимость от гравитации | Зависит | Не зависит |
| Точность определения угла поворота | Низкая | Высокая |
| Стабильность показаний | Менее стабильны | Более стабильны |
Применение гироскопов и акселерометров в современных устройствах
Инерционные датчики нашли широкое применение в различных сферах:
- Мобильные устройства (смартфоны, планшеты)
- Системы стабилизации изображения в фото- и видеокамерах
- Навигационные системы
- Системы управления беспилотными аппаратами
- Игровые контроллеры
- Системы безопасности автомобилей
Преимущества использования гироскопов в мобильных устройствах
Замена акселерометров на гироскопы в современных смартфонах и планшетах обеспечивает ряд преимуществ:
- Более точное определение ориентации устройства в пространстве
- Улучшенное управление в играх и приложениях виртуальной реальности
- Снижение количества ложных срабатываний при повороте экрана
- Возможность реализации более сложных жестов управления
- Повышение точности работы навигационных приложений
Комбинирование гироскопа и акселерометра
В современных устройствах часто используется комбинация гироскопа и акселерометра. Это позволяет компенсировать недостатки каждого из датчиков и получить более точные данные о движении и ориентации устройства.
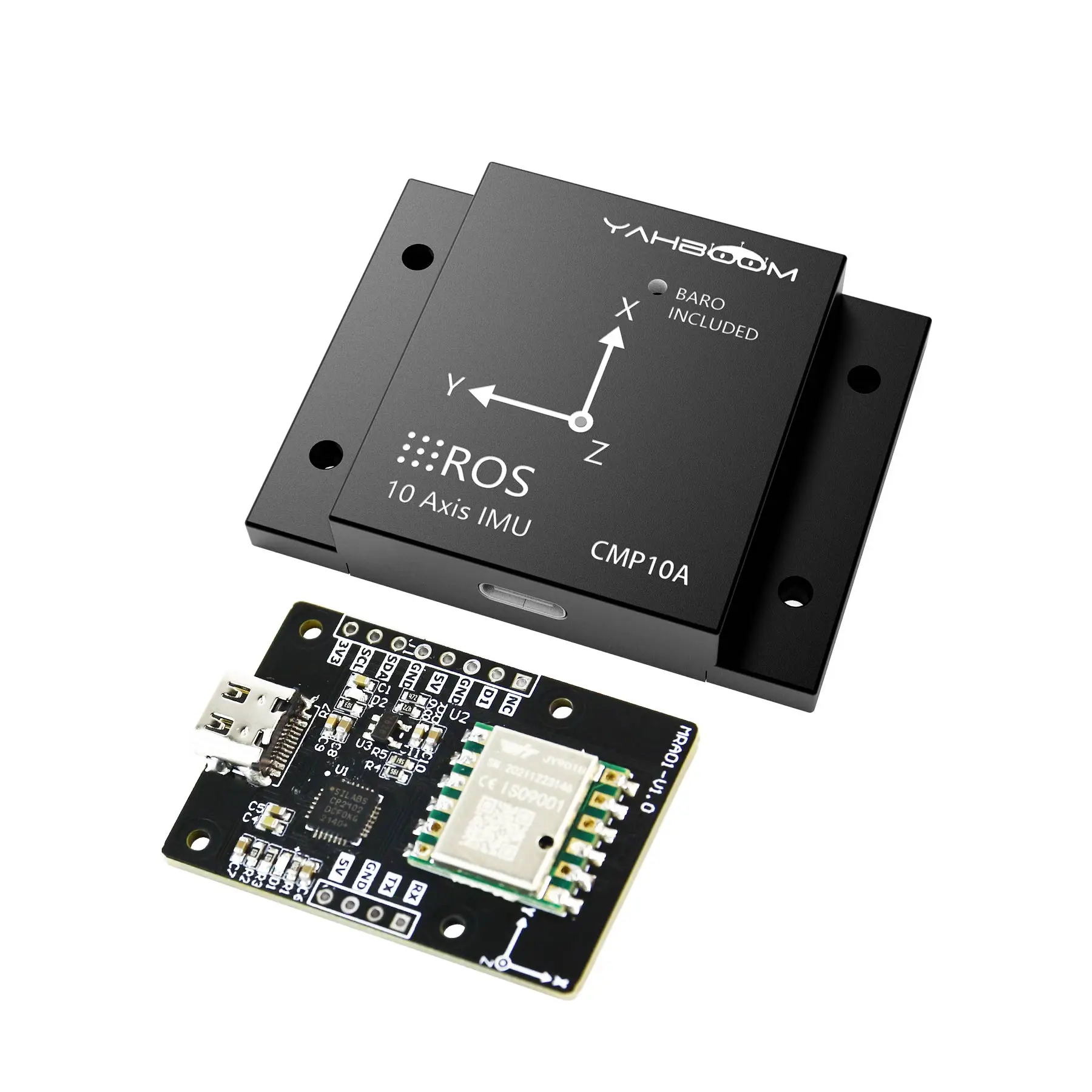
Такая комбинация датчиков называется инерциальным измерительным модулем (IMU — Inertial Measurement Unit). IMU обеспечивает высокую точность измерений в широком диапазоне движений и условий использования.

Преимущества использования IMU:
- Повышенная точность определения положения устройства
- Устойчивость к вибрациям и кратковременным ускорениям
- Возможность работы в условиях отсутствия сигналов GPS
- Быстрая реакция на изменение ориентации устройства
Технологии производства современных гироскопов
Современные гироскопы для мобильных устройств изготавливаются по технологии MEMS (Micro-Electro-Mechanical Systems). Это позволяет создавать миниатюрные датчики с высокими характеристиками.
Ведущим производителем MEMS-гироскопов является компания Analog Devices. Их датчики имеют размеры около 10x10x2 мм и легко интегрируются в печатные платы мобильных устройств.
Ключевые характеристики современных MEMS-гироскопов:
- Миниатюрные размеры (менее 10 мм³)
- Низкое энергопотребление
- Высокая чувствительность
- Широкий диапазон измерений (до нескольких тысяч градусов в секунду)
- Устойчивость к механическим воздействиям
Перспективы развития инерционных датчиков
Технологии инерционных датчиков продолжают активно развиваться. Основные направления развития включают:
- Дальнейшую миниатюризацию
- Повышение точности измерений
- Снижение энергопотребления
- Интеграцию нескольких типов датчиков в одном корпусе
- Разработку новых алгоритмов обработки данных
Эти разработки позволят создавать еще более совершенные системы определения положения и навигации для мобильных устройств, робототехники, беспилотных аппаратов и других применений.
Заключение: роль инерционных датчиков в современной электронике
Гироскопы и акселерометры стали неотъемлемой частью современных мобильных устройств и многих других электронных систем. Они обеспечивают точное определение ориентации и движения, открывая новые возможности для взаимодействия человека с электронными устройствами.
Комбинация этих датчиков в инерциальных измерительных модулях позволяет добиться высокой точности и надежности измерений в самых разных условиях. Дальнейшее развитие технологий инерционных датчиков будет способствовать созданию еще более совершенных и функциональных электронных устройств.
MEMS-акселерометры и гироскопы — разбираемся в спецификации / Хабр
“Хьюстон, у нас проблемы”, — устало раздалось в мозгу, пытающемся в ночи продраться сквозь Datasheet IMU MPU-9250 от InvenSense. Когда все слова в отдельности понятны, но взаимосвязь их запутана до невозможности. Началось всё с параметра LSB, про который я только смутно помнила, что в переводе это Least Significant Bit. Дальше пошли “Resolution”, “Sensitivity”, а ещё дальше я поняла, что получающийся текст уже можно озаглавить “Datasheet для чайников”.
Немного об основных блоках инерционного модуля.
MEMS-гироскоп
MPU-9250 состоит из трёх независимых одноосных вибрационных датчиков угловой скорости (MEMS гироскопов), которые реагируют на вращение вокруг X-, Y-, Z- осей. Две подвешенные массы совершают колебания по противоположным осям. С появлением угловой скорости эффект Кориолиса вызывает изменение направления вибрации (, которое фиксируется емкостным датчиком. Измеряемая дифференциальная емкостная составляющая пропорциональна углу перемещения [Время Электроники]. Получившийся сигнал усиливается, демодулируется и фильтруется, давая в итоге напряжение, пропорциональное угловой скорости вращения. Данный сигнал оцифровывается с помощью встроенного в плату 16-битного АЦП. Скорость оцифровки (sample rate) может программно варьироваться от 3.9 до 8000 выборок в секунду (samples per second, SPS), а задаваемые пользователем фильтры низких частот (LPF) предоставляют широкий диапазон возможных частот среза. ФНЧ нужен, в том числе, чтобы убирать вибрации от моторов (как правило, выше 20-25 Гц).
Измеряемая дифференциальная емкостная составляющая пропорциональна углу перемещения [Время Электроники]. Получившийся сигнал усиливается, демодулируется и фильтруется, давая в итоге напряжение, пропорциональное угловой скорости вращения. Данный сигнал оцифровывается с помощью встроенного в плату 16-битного АЦП. Скорость оцифровки (sample rate) может программно варьироваться от 3.9 до 8000 выборок в секунду (samples per second, SPS), а задаваемые пользователем фильтры низких частот (LPF) предоставляют широкий диапазон возможных частот среза. ФНЧ нужен, в том числе, чтобы убирать вибрации от моторов (как правило, выше 20-25 Гц).
Трёхосевой MEMS-акселерометр
Использует для каждой оси отдельную пробную массу, которая смещается при возникновении ускорения вдоль данной оси (фиксируются емкостными датчиками). Архитектура MPU-9250 снижает подверженность температурному дрейфу и вариациям электропараметров. При расположении устройства на плоской поверхности оно измерит 0g по X- и Y-осям и +1g по Z-оси.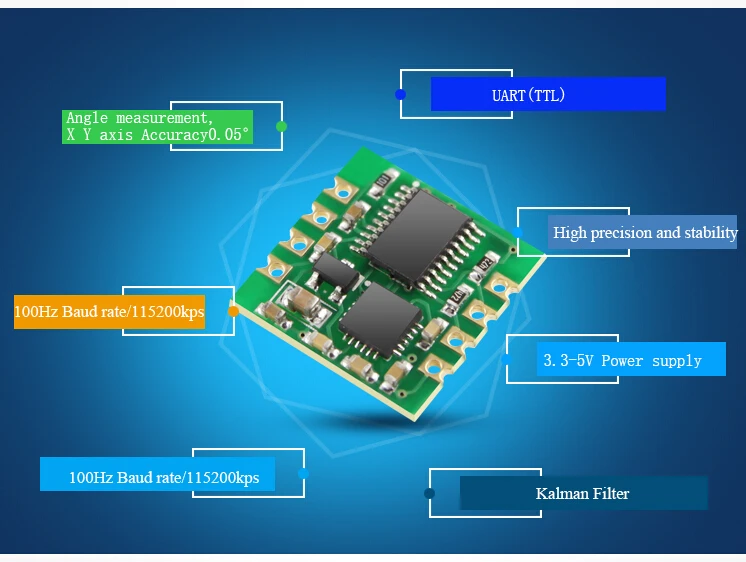 Масштабный коэффициент (scale factor — отношение изменения выходного сигнала к изменению выходного измеряемого сигнала) калибруется на заводе и не зависит от напряжения питания. Каждый сенсор снабжен индивидуальным сигма-дельта АЦП (состоит из модулятора и цифрового фильтра низких частот, подробнее про устройство в [Easyelectronics]), выходной цифровой сигнал которого имеет настраиваемый диапазон измерений.
Масштабный коэффициент (scale factor — отношение изменения выходного сигнала к изменению выходного измеряемого сигнала) калибруется на заводе и не зависит от напряжения питания. Каждый сенсор снабжен индивидуальным сигма-дельта АЦП (состоит из модулятора и цифрового фильтра низких частот, подробнее про устройство в [Easyelectronics]), выходной цифровой сигнал которого имеет настраиваемый диапазон измерений.
И сразу про трёхосевой MEMS-магнетометр
Основан на высокоточной технологии эффекта Холла. Включает в себя магнитные сенсоры, определяющие напряжённость магнитного поля земли по осям, схему управления, цепь усиления сигнала и вычислительную схему для обработки сигналов с каждого датчика. Каждый АЦП имеет разрешение 16 бит, диапазон измерений . Для измерения слабых магнитных полей применяют либо единицу в системе СИ микротесла (мкТл), либо гаусс (Гс, система СГС): , [Радиолоцман]).
Итак, что такое LSB и как его посчитать? Инструкция по добыче
Допустим, наш акселерометр сейчас работает в диапазоне измерений , то есть полный размах возможных значений будет .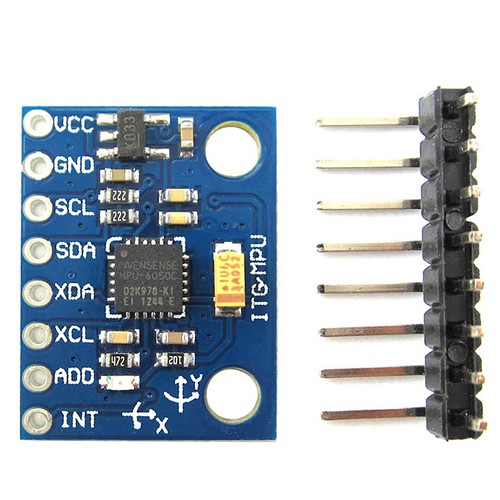 Соответствующие им значения напряжений оцифровываются 16-битным АЦП, который может разбить весь интервал максимально на ступеней. Минимальный инкремент, который можно засечь, — это как раз одна ступенька . Тут надо помнить, что счёт ведётся с нуля, так что на самом деле максимально измеряемое значение будет . То есть, чем больше бит в цифровом слове АЦП или ЦАП, тем меньше будет расхождение. При этом
чувствительность (иногда называется масштабным коэффициентом, sensitivity scale factor) датчика на конкретном диапазоне будет определяться как соотношение электрического выходного сигнала и механического воздействия. Традиционно указывается для частоты сигнала 100 Гц и температуры Для MPU-9250 чувствительность составляет ступеней на каждые g или (, ), для другого IMU, BMI088 от Bosch Sensortec, чувствительность гироскопа высчитывается так же, а для акселерометра используется ступеней на каждое g.
Соответствующие им значения напряжений оцифровываются 16-битным АЦП, который может разбить весь интервал максимально на ступеней. Минимальный инкремент, который можно засечь, — это как раз одна ступенька . Тут надо помнить, что счёт ведётся с нуля, так что на самом деле максимально измеряемое значение будет . То есть, чем больше бит в цифровом слове АЦП или ЦАП, тем меньше будет расхождение. При этом
чувствительность (иногда называется масштабным коэффициентом, sensitivity scale factor) датчика на конкретном диапазоне будет определяться как соотношение электрического выходного сигнала и механического воздействия. Традиционно указывается для частоты сигнала 100 Гц и температуры Для MPU-9250 чувствительность составляет ступеней на каждые g или (, ), для другого IMU, BMI088 от Bosch Sensortec, чувствительность гироскопа высчитывается так же, а для акселерометра используется ступеней на каждое g.
Варианты FS вытаскиваем из спецификации на гироскопы и, чтобы дважды не вставать, акселерометры.
FS для акселерометров я брала ещё и из документации на BMI088 (см. ниже).
| Гироскоп, 16 бит | Акселерометр, 16 бит | ||
|---|---|---|---|
| Диапазон (FS), (dps) | LSB, (dps) | Диапазон (FS), g | LSB, mg |
| (FS = 250) | 0,004 | (FS = 4) | 0,06 |
| (FS = 500) | 0,008 | (FS = 6) | 0,09 |
| (FS = 1000) | 0,0015 | (FS = 8) | 0,12 |
| (FS = 2000) | 0,03 | (FS = 12) | 0,18 |
| (FS = 4000) | 0,06 | (FS = 16) | 0,24 |
| (FS = 24) | 0,37 | ||
| (FS = 32) | 0,48 | ||
| (FS = 48) | 0,73 | ||
Всё, вроде бы, встало на свои места, можно идти дальше. В некоторых случаях (ниже, например, вырезка из документации на BMI088) отдельно указывается такой параметр, как разрешение (Resolution).
В некоторых случаях (ниже, например, вырезка из документации на BMI088) отдельно указывается такой параметр, как разрешение (Resolution).
По факту, вроде бы, получается, что это должен быть LSB. Но почему тогда мы видим одно значение вместо нескольких, завязанных на конкретные диапазоны? Пришлось расширять список исследуемых источников в поисках ответов.
Что такое разрешение (Resolution)?
Минимальная величина, которую достоверно видит датчик, крайне важная при попытке соблюсти баланс между ценой и производительностью. Это не точность — сенсор с высоким разрешением может быть не особо точным, равно как и сенсор с малым разрешением в определённых областях может обладать достаточной точностью. К сожалению, LSB определяет лишь теоретическое минимально-различимое значение при условии, что мы можем использовать все 16 бит АЦП. Это разрешение в цифровом мире. В аналоговом какая-то часть ступеней будет зашумлена и число эффективных бит будет меньше.
Какие бывают характеристики шума и откуда что берётся?
Источники шума можно в общем разбить на электронный шум схемы, преобразующей движение в сигнал напряжения (джонсоновский тепловой шум, дробовой шум, розовый 1/f фликкер-шум и т.д.), и тепловой механический (броуновский, обусловленный наличием мелких подвижных частей) от самого сенсора. Характеристики последнего будут зависеть от резонансной частоты механической части системы (собственной частоты колебаний сенсора ).
Среднеквадратичное значение шумов во всём спектральном диапазоне — Total RMS (Root mean square) Noise
Уровни шума можно определять несколькими способами. Можно рассматривать их во временной или частотной области (после преобразования Фурье). В первом случае берут остаточный шум как среднеквадратичное значение сигналов от неподвижного датчика (по факту это стандартное отклонение для выборки при ) за некоторый промежуток времени:
Ускорения или угловые скорости вращения меньше уровня широкополосного шума будут неразличимы — вот и фактическое разрешение.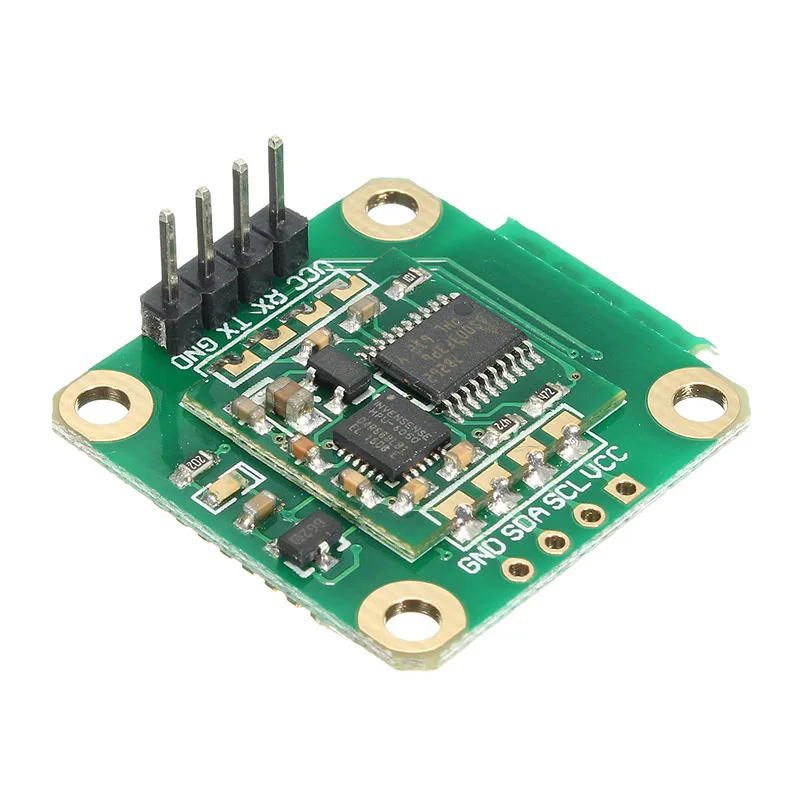 Среднеквадратичное значение переменного напряжения или тока (часто называется действующим или эффективным) равно величине постоянного сигнала, действие которого произведёт такую же работу в активной (резистивной) нагрузке за время периода. Наиболее эффективен такой подход при оценке широкополосного шума, где доминирует белый шум.
Среднеквадратичное значение переменного напряжения или тока (часто называется действующим или эффективным) равно величине постоянного сигнала, действие которого произведёт такую же работу в активной (резистивной) нагрузке за время периода. Наиболее эффективен такой подход при оценке широкополосного шума, где доминирует белый шум.
Для белого шума отношение амплитуды (мгновенного пикового значения) к среднеквадратчному с вероятностью 99.9% составляет Называется такое отношение крест-фактором (crest factor, cross ratio). Можно выбрать вероятность 95.5% — крест фактор будет равен 4.
На деле же сигналы шума ведут себя не так хорошо и могут выдавать пики, увеличивающие крест-фактор до 10 раз. В некоторых спецификациях можно найти значения или сам множитель.
В узкой низкочастотной полосе 0.1-10 Гц основную роль играет фликкер-шум “1/f”, для оценки которого используют значение размаха шумового сигнала (peak-to-peak).
Спектральная плотность
Иногда сигнал удобнее рассматривать в частотной области, где его описание называется спектром (зависимость амплитуды и фазы от частоты).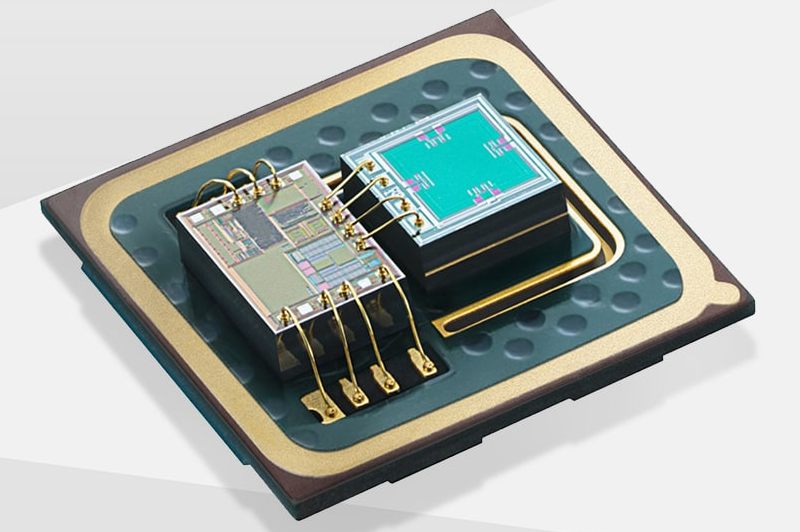 Одна из возможных характеристик шума в спецификациях зовётся power spectral density of noise (PSD), noise spectral density, noise power density, или попросту noise density). Описывает распределение мощности шума по диапазону частот. Вне зависимости от представления электрического сигнала через ток или напряжение мгновенную рассеиваемую на нагрузке мощность можно нормировать (R = 1 Ом) и выразить её как Средняя мощность, рассеиваемая сигналом в течение промежутка времени
Одна из возможных характеристик шума в спецификациях зовётся power spectral density of noise (PSD), noise spectral density, noise power density, или попросту noise density). Описывает распределение мощности шума по диапазону частот. Вне зависимости от представления электрического сигнала через ток или напряжение мгновенную рассеиваемую на нагрузке мощность можно нормировать (R = 1 Ом) и выразить её как Средняя мощность, рассеиваемая сигналом в течение промежутка времени
Мощность – скорость поступления энергии. Через энергию определяются детерминированные и непериодические сигналы. Периодические и случайные сигналы выражаются через мощность, поскольку они не ограничены по времени и, соответственно, энергии, при этом в любой момент времени их средняя мощность отлична от нуля
Можно вспомнить [Sklyar], что произвольный периодический сигнал выражается через комбинацию бесконечного числа гармоник с возрастающими частотами:
что после представления косинуса и синуса в экспоненциальной форме
и замены можно записать в виде
где комплексные коэффициенты (спектральные компоненты) ряда Фурье для ,
В общем случае эти коэффициенты представимы следующим образом:
Амплитудным и фазовым спектром называют графики зависимости и от частоты.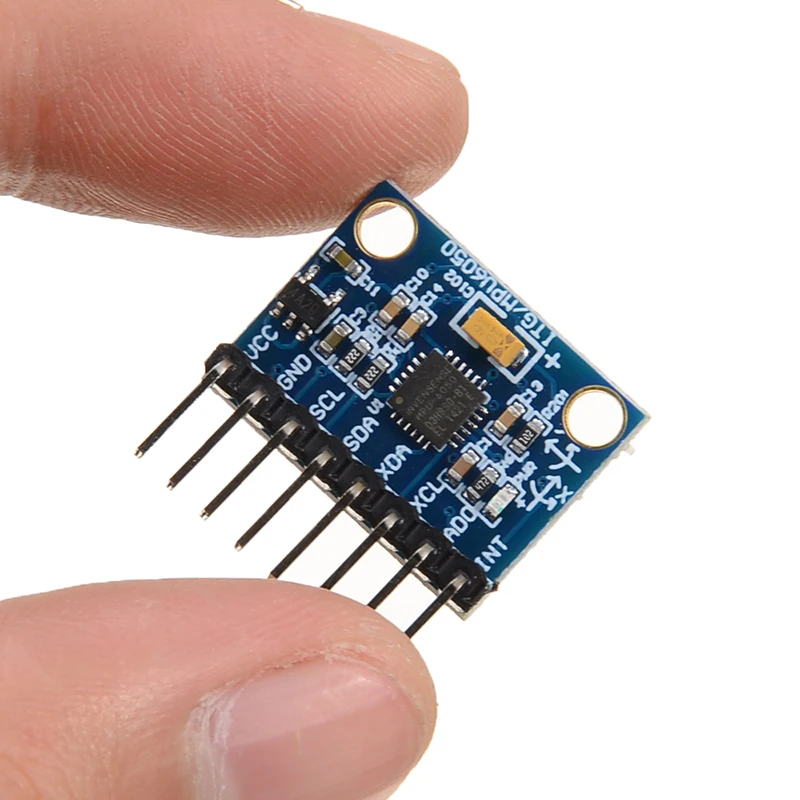 Спектральная плотность мощности периодического сигнала даёт распределение мощности сигнала по диапазону частот:
Спектральная плотность мощности периодического сигнала даёт распределение мощности сигнала по диапазону частот:
и имеет размерность Средняя нормированная мощность действительного сигнала будет
Непериодические случайные сигналы (в частности, шум) можно описать как периодические в предельном смысле. Если стремится к бесконечности, последовательность импульсов превращается в отдельный импульс , число спектральных линий стремится к бесконечности, график спектра превращается в гладкий спектр частот Для данного предельного случая можно определить пару интегральных преобразований Фурье
и
где — Фурье-образ.
Спектральная плотность мощности случайного сигнала определяется через предел
и описывает распределение мощности сигнала в диапазоне частот.
Поскольку мы предполагаем, что среднее для белого шума датчиков в неподвижном состоянии равно нулю (), то квадрат среднеквадратического значения равен дисперсии и представляет собой полную мощность в нормированной нагрузке:
Смотрим в спецификации — там на самом деле под именем спектральной плотности указан квадратный корень из неё с соответствующей размерностью или То есть значение RMS шума без указания полосы частот, на которой он считался (Bandwidth), бессмысленно.
Чуть подробнее про выбор полосы пропускания
На выходе MEMS-датчика мы получаем сигналы разной частоты. Предполагается, что мы заранее имеем некое представление об измеряемых нами процессах. К примеру, при определении вектора ускорения дрона шумом являются вибрации аппарата. Отделить их от полезного сигнала можно с помощью фильтра низких частот, который обрежет все частоты выше указанной (к примеру, 200 Гц). MPU-9250 предоставляет возможность настроить частоту среза фильтра низких частот с помощью параметра с магическим названием DLPFCFG. Расшифровывается он как Digital Low Pass Filter Configuration. Далее в спецификации там и тут всплывали не менее загадочные выражения типа (DLPFCFG = 2, 92Hz), но за расшифровкой пришлось лезть в другой документ, “Register Map and Descriptions”. Там показано, какие наборы битов в какие регистры надо записать для достижения желаемых эффектов:
Опуская технические подробности конфигурирования, можно сказать следующее. В данном датчике осуществляется настраиваемая фильтрация показаний не только акселерометров, гироскопов, но и температурного датчика. Для каждого существует в общей сложности от 7 до 10 режимов, характеризующихся такими понятиями, как полоса пропускания (Bandwidth) в Гц, задержка в мс, частота дискретизации (sampling frequency, Fs) в кГц.
В данном датчике осуществляется настраиваемая фильтрация показаний не только акселерометров, гироскопов, но и температурного датчика. Для каждого существует в общей сложности от 7 до 10 режимов, характеризующихся такими понятиями, как полоса пропускания (Bandwidth) в Гц, задержка в мс, частота дискретизации (sampling frequency, Fs) в кГц.
В таблицу режимов фильтра акселерометра добавилась колонка «Плотность шума» в , а “Bandwidth” колонка дополнилась значением “3dB”.
Легче не стало, так что пройдёмся прямо по списку.
Наследие Древнего Рима
Частота дискретизации + децимация -АЦП = скорость обновления данных (digital output data rate, ODR)
С частотой дискретизации (она же частота семплирования) всё понятно — это количество взятых за секунду точек непрерывного по времени сигнала при его дискретизации АЦП. Измеряется в герцах.
Для того, чтобы в выборку попало значение, приближенное к пиковой амплитуде сигнала, важно брать частоту дискретизации минимум в 10 раз больше частоты полезного сигнала. MPU-9250 предлагает три варианта Fs = 32kHz, 8kHz, 1kHz.
MPU-9250 предлагает три варианта Fs = 32kHz, 8kHz, 1kHz.
Но это абсолютно не значит, что сигнал на выходе акселерометра или гироскопа появляется с тем же периодом.
Если взять те же дроны, тут всё упирается в борьбу за снижение энергопотребления, повышение скорости вычислений и снижение шума выходных данных. Можно понизить частоту обновления данных на выходе, позволив внутренним алгоритмам интегрировать входную информацию в течение некоторого периода времени. Среднеквадратичный понизится, но также сузится и полоса пропускания (датчик сможет засечь лишь те процессы, частота которых будет меньше 50% скорости обновления данных).
Тут лучше сразу вспомнить теорему Котельникова. Она обещает, что при дискретизации аналогового сигнала можно избежать потерь информации (то есть восстановить сигнал без искажений), если частота полезного сигнала будет не больше половины частоты дискретизации, называемой также частотой Найквиста. На практике классический антиалайзинговый фильтр (фильтр низких частот, уменьшающий вклад побочных частотных компонентов в выходном сигнале до пренебрежимо малых уровней — ГОСТ Р 8. 714-2010) требует в большинстве случаев разницу минимум в 2.5 раза [Siemens].
714-2010) требует в большинстве случаев разницу минимум в 2.5 раза [Siemens].
Для Fs = 32kHz частота Найквиста будет 16kHz. При этом полезный сигнал вряд ли выйдет за полосу fa = 20Hz (мало кто может менять направление движения чаще 20 раз в секунду). Итого, частота дискретизации значительно превышает частоту, требуемую для сохранения информации, содержащейся в полосе fa (40Hz, в 400 раз превышает), то есть полезный сигнал избыточно дискретизирован. Полоса между частотами fa и fs-fa не содержит никакой полезной информации. Можно уменьшить частоту дискретизации (на диаграмме это сделано с коэффициентом М, [7]), проредив последовательность семплов (отсчётов). Этот процесс и называется децимацией.
Согласно спецификации на MPU-9250, акселерометры снабжены сигма-дельта АЦП. Схемы на его основе потребляют минимальную мощность. Надо отметить, что полоса пропускания у данных преобразователей весьма узкая, не превышает звукового диапазона [Easyelectronics], но для штатного квадрокоптера больше и не нужно. Состоят они из двух блоков: -модулятора и цифрового децимирующего фильтра низких частот.
Состоят они из двух блоков: -модулятора и цифрового децимирующего фильтра низких частот.
Зачем объединять фильтр низких частот и децимацию?
Честная выдержка из Вики:
Если исходный сигнал не содержит частот, превышающих частоту Найквиста децимированного сигнала, то форма спектра полученного (децимированного) сигнала совпадает с низкочастотной частью спектра исходного сигнала. Частота дискретизации, соответствующая новой последовательности отсчётов, в N раз ниже, чем частота дискретизации исходного сигнала.
Если исходный сигнал содержит частоты, превышающие частоту Найквиста децимированного сигнала, то при децимации будет иметь место алиасинг (наложение спектров).
Таким образом, для сохранения спектра необходимо до децимации удалить из исходного сигнала частоты, превышающие частоту Найквиста децимированного сигнала. В спецификации на MPU-9250 не очень много информации о характеристиках DLPF, но можно найти исследования энтузиастов [9].
Bandwidth, она же frequency response (частотный отклик)
диапазон частот, в котором датчик обнаруживает движение и выдает действительный выходной сигнал. В некоторых спецификациях приводится частотная характеристика датчика — зависимость электрического выходного сигнала акселерометра от внешних механических воздействий с фиксированной амплитудой, но различными частотами. В пределах полосы пропускания неравномерность частотной характеристики не превышает заданной. В случае применения цифрового фильтра низких частот выбор полосы пропускания как раз позволяет изменять частоту среза, неизбежно оказывая влияние на скорость отклика датчика на изменения положения в пространстве. Частота среза обязана быть меньше половины скорости оцифровки (digital output data rate, ODR), называемой также частотой Найквиста.
Для акселерометров MPU-9250 границы полосы пропускания определяются так, чтобы внутри диапазона спектральная плотность сигнала отличалась от пиковой (на частоте 0 Гц) не больше, чем на -3дБ.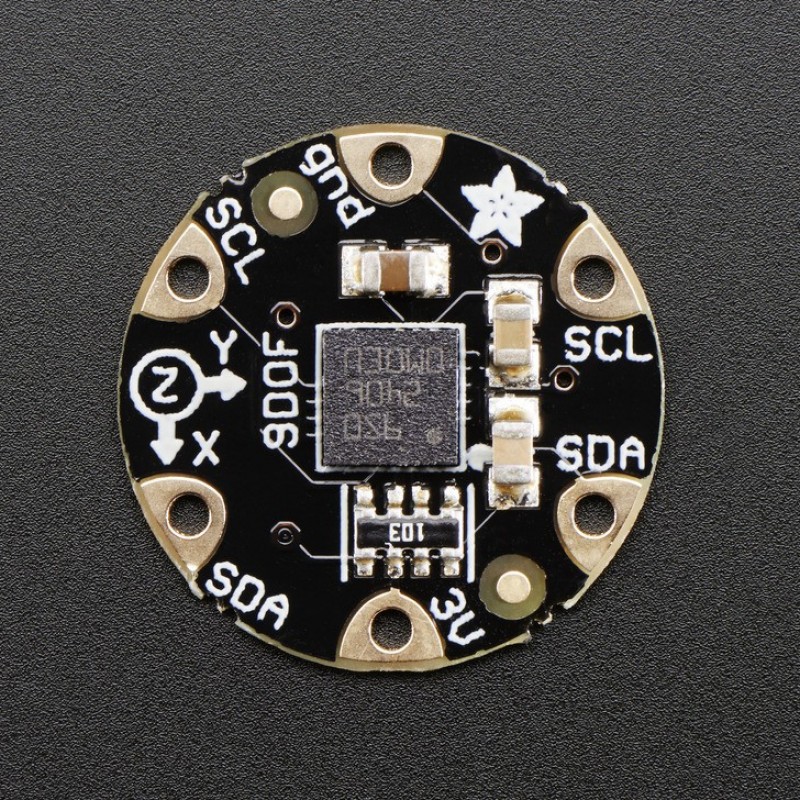 Этот уровень примерно соответствуют падению до половины спектральной плотности (или 70.7% от пиковой спектральной амплитуды). Напомню, для энергетических величин (мощность, энергия, плотность энергии), пропорциональных квадратам силовых величин поля, выраженное в децибелах отношение
Этот уровень примерно соответствуют падению до половины спектральной плотности (или 70.7% от пиковой спектральной амплитуды). Напомню, для энергетических величин (мощность, энергия, плотность энергии), пропорциональных квадратам силовых величин поля, выраженное в децибелах отношение
.
Итог: сигналы, прошедшие через ФНЧ, менее зашумлены, у них лучшее разрешение, но при этом меньшая полоса пропускания. Поэтому указание разрешения в спецификации без привязки к полосе пропускания смысла не имеет.
Вернёмся к разрешению
В спецификации на MPU-9250 сведений о разрешении в принципе нет, для BMI088 под именем «Разрешение» представлены цифровое разрешение (LSB) и чувствительность»:
Оценить разрешение для каждой полосы пропускания можно по пиковому шуму Среднеквадратичная величина шума на выходе связана с указанной в спецификации спектральной плотностью (а вернее, корнем из неё) и эквивалентной шумовой полосой пропускания (equivalent noise bandwidth, ENBW, — полоса пропускания эквивалентной системы, имеющей прямоугольную АЧХ и одинаковые с исходной системой значение на нулевой частоте и дисперсию на выходе, при воздействии на входы систем белого шума):
А шумовая полоса пропускания связана с 3dB полосой коэффициентами, соответствующим порядку низкочастотного фильтра:
Судя по исследованию в [MPU9250_DLPF], наш выбор 1.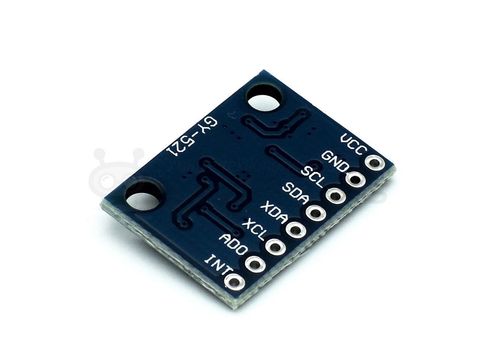 57. Полученное среднеквадратическое значение учитывает вклад белого шума (ни шума квантования, ни механического шума там нет). Например, для акселерометра расчётное значение для получается . При этом в спецификации отдельно указан полный среднеквадратичный шум Расхождение значительное. К сожалению, он указан лишь для одной полосы, а для акселерометра BMI088 в спецификации указано только PSD. Так что будем использовать что есть. Кросс-фактор возьмём 4. Теперь самое интересное. Отношение даст примерный порядок эффективных бит на данном диапазоне измерений, который прилично меньше 16-битного разрешения АЦП.
57. Полученное среднеквадратическое значение учитывает вклад белого шума (ни шума квантования, ни механического шума там нет). Например, для акселерометра расчётное значение для получается . При этом в спецификации отдельно указан полный среднеквадратичный шум Расхождение значительное. К сожалению, он указан лишь для одной полосы, а для акселерометра BMI088 в спецификации указано только PSD. Так что будем использовать что есть. Кросс-фактор возьмём 4. Теперь самое интересное. Отношение даст примерный порядок эффективных бит на данном диапазоне измерений, который прилично меньше 16-битного разрешения АЦП.
| MPU-9250 | BMI088 | ||||
|---|---|---|---|---|---|
| Гироскоп | |||||
| 523 | 0. 41 41 |
1.6 | |||
| 250 | 0.2 | 0.8 | 230 | 0.27 | 1.1 |
| 184 | 0.17 | 0.69 | 116 | 0.19 | 0.76 |
| 92 | 0.12 | 0.49 | 64 | 0.14 | 0.57 |
| 41 | 0.08 | 0.32 | 47 | 0.12 | 0.49 |
| 20 | 0.06 | 0.23 | 32 | 0.1 | 0.4 |
| 10 | 0.04 | 0.16 | 23 | 0.09 | 0.34 |
| 5 | 0.03 | 0.11 | 12 | 0.06 | 0.25 |
| Акселерометр | |||||
218. 1 1 |
5.6 | 22 | 280 | 3.4 | 14 |
| 99 | 3.8 | 15 | 145 | 2.4 | 10 |
| 44.8 | 2.5 | 10 | 80 | 1.8 | 7 |
| 21.2 | 1.7 | 7 | 40 | 1.3 | 5 |
| 10.2 | 1.2 | 4.9 | 20 | 0.9 | 4 |
| 5.05 | 0.9 | 3.4 | 10 | 0.6 | 2.6 |
| 420 | 7.8 | 31 | 5 | 0.5 | 1.8 |
| 1046 | 12.3 | 49 | |||
Delay (ms), или откуда берётся задержка
Из необходимости сохранять во внутреннем буфере переменные для деления фильтром сигнала на разные частоты
Итого. Чем ниже частота обрезания фильтра, тем меньше шума в сигнале. Но тут надо быть осторожным, потому что одновременно с этим вырастает и задержка. Кроме того, можно пропустить полезный сигнал [8].
Чем ниже частота обрезания фильтра, тем меньше шума в сигнале. Но тут надо быть осторожным, потому что одновременно с этим вырастает и задержка. Кроме того, можно пропустить полезный сигнал [8].
| MPU-9250 | BMI088 | ||
|---|---|---|---|
| Гироскоп, 16 бит | |||
| Диапазон (FS), (dps) | Разрешение, бит (BW=92Hz) | Диапазон (FS), (dps) | Разрешение, бит (BW=64Hz) |
| 8 | |||
| 9 | 9 | ||
| 10 | 10 | ||
| 11 | 11 | ||
| 12 | 12 | ||
| Акселерометр | |||
| Диапазон (FS), g | Разрешение, бит | Диапазон (FS), g | Разрешение (по X,Y), бит |
| 6 | 8 | ||
| 7 | 9 | ||
| 8 | 10 | ||
| 9 | 11 | ||
И это лишь самые основные параметры.
Откуда что бралось:
- Самый приятный документ от Freescale Semiconductor — «How Many Bits are Enough?»
- [EE] — «Resolution vs Accuracy vs Sensitivity Cutting Through the Confusion»
- [Время электроники] — «МЭМС-датчики движения от STMicroelectronics: акселерометры и гироскопы»
- [LSB] — «An ADC and DAC Least Significant Bit (LSB)»
- [Measurement Computing] — «TechTip: Accuracy, Precision, Resolution, and Sensitivity»
- [KIT] — «Акселерометры Analog Devices — устройство и применение»
- [Easyelectronics] — «Сигма-дельта АЦП»
- [Радиолоцман] — «Магнитометры: принцип действия, компенсация ошибок»
- [SO] — «Noise Measurement»
- [Mide] — «Accelerometer Specifications: Deciphering an Accelerometer’s Datasheet»
- [CiberLeninka] — Delta-Sigma ADC Filter
- [SciEd] — «Особенности реализации цифровой фильтрации с изменением частоты дискретизации»
- [MPU6050] — «Using the MPU6050’s DLPF»
- [MPU9250_DLPF] — MPU9250 Gyro Noise DLPF work investigation
- Understanding Sensor Resolution Specifications
- Siemens Digital Signal Processing
- МЭМС-датчики движения от STMicroelectronics
- [TMWorld] — «Evaluating inertial measurement units»
- [Sklyar] – Скляр Б.
 Цифровая связь. Теоретические основы и практическое применение.
Цифровая связь. Теоретические основы и практическое применение.
Гироскоп или акселерометр? — ITC.ua
После выхода iPhone 4 многие много внимания было уделено новому дисплею, корпусу и прочим важным вещам. И лишь мимоходом отметили замену акселерометров на гироскопы для улучшения управления в играх. В своей статье для «Компьютерного обозрения» я отметил этот момент, в следствие чего даже консультировал одного из читателей. Почему бы не уделить этому моменту внимание и не разобраться зачем одни датчики были заменены на другие и чем они собственно отличаются?
Начнем с того, что и акселерометры и гироскопы являются инерционными датчиками. Акселерометры (лат. accelero — ускоряю и μετρέω — измеряю) — приборы, предназначенные для имерения проекции кажущегося ускорения.
Простейшая модель акселлерометра
Курс
Розробка на Java
Опануйте популярну мову програмування Java у зручний для вас час, та заробляйте від $1000 на початку кар’єри
РЕЄСТРУЙТЕСЯ!
В данном случае русская Википедия дает на удивление неплохое определение.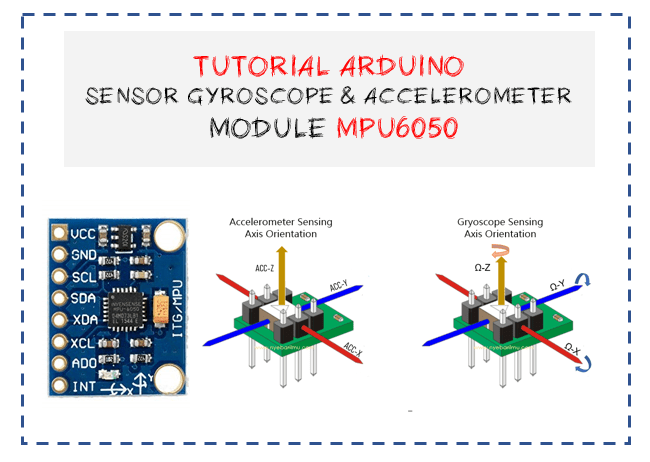 В случае с мобильными телефонами датчики реагировали на изменение вектора ускорения свободного падения и все последующие действия исходили из этого.
В случае с мобильными телефонами датчики реагировали на изменение вектора ускорения свободного падения и все последующие действия исходили из этого.
Условная схема определения положения устройства в пространстве с применением двух акселлерометров
Точность в результате была довольно низкой, так как угол поворота устройства в пространстве напрямую измерить таким образом невозможно, лишь примерно оценить. На практике это выражалось в задумчивости поворота экранов, ложных срабатываниях и т.д. Какие же преимущества дает гироскоп и чем он собственно отличается?
Определение на Вики настолько далеко от общего, что обратимся к первоисточнику.
Впервые определение гироскопу дал Леон Фуко, назвавший так свой прибор, с помощью которого он наблюдал суточное вращение Земли. В Большой Советской Энциклопедии приводится следующее «Гироскоп — быстро вращающееся твердое тело, ось которого может изменять свое направление в пространстве». В современных гироскопах могут происходить разнообразные физические процессы, не обязательно основанные на вращении твердого тела.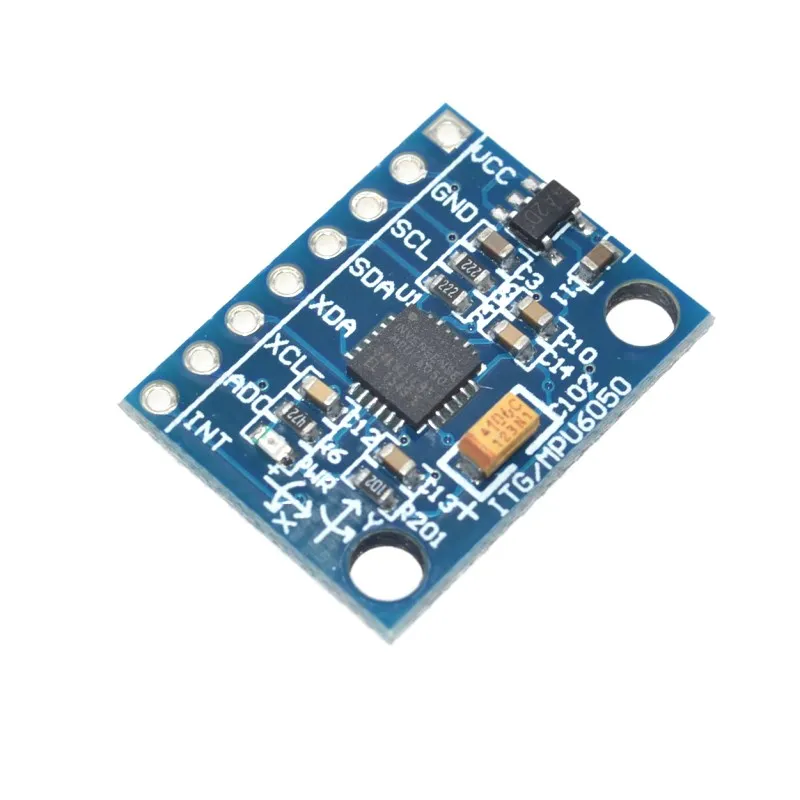 Хотя и классические гироскопы все еще применяются.
Хотя и классические гироскопы все еще применяются.
Примеры гироскопов. Банальный волчок по своей природе является гироскопом.
Примером классического гироскопа является ротор в кардановом подвесе. При вращении ротора он будет сохранять неизменным свое положение в пространстве независимо от движения основания. Таким образом можно измерять угол поворота основания, а соответственно и корабля/самолета etc. Именно по гирокомпасам ходят суда и летают самолеты, не полагаясь на примерные показания магнитного компаса, особенно в полярных широтах, а данные о положении самолета в пространстве получаются с гировертикали и гирогоризонта.
Естественно, классический гироскоп не может применяться в электронике. Для этого используются вибрационные микромеханические гироскопы — датчики угловой скорости. Чувствительный элемент таких приборов закреплен, при попытке его поворота возникает кориолисова сила, пропорциональная угловой скорости. Не вдаваясь в подробности работы, которые вряд ли будут кому-то интересны скажем, что выходным сигналом ДУС является напряжение, пропорциональное угловой скорости. Такие датчики имеют небольшие габариты (около 10x10x2 мм) и могут быть легко интегрированы в печатную плату.
Такие датчики имеют небольшие габариты (около 10x10x2 мм) и могут быть легко интегрированы в печатную плату.
Мировым лидером в производстве таких датчиков является компания Analog Devices, датчик которой изображен на рисунке. Можно с большой долей вероятности утверждать, что именно датчики этой компании установлены в iPhone 4.
Преимущества очевидны. В любой момент времени можно знать положение телефона в пространстве. В играх для управления можно использовать не только поворот устройства, но и скорость поворота, что позволяет организовать более точное и реалистичное управление.
Надеюсь, этот небольшой экскурс в теорию и практику гироскопов вас не утомил, а лишь еще раз подчеркнул, что современный мобильный телефон крайне сложное устройство, в котором применяются технологии ранее доступные только авиационной и космической промышленности. А мы тем временем не брезгуем ими открывать пивные бутылки.
Изображения датчиков взяты с сайта представительства Analog Devices в СНГ и странах Балтии
Смартфоны
Акселерометр против датчика гироскопа и IMU, как выбрать один?
С ростом популярности МЭМС-акселерометров и гироскопических датчиков для определения движения Arduino многие рассматривают возможность выбора одного из них для запуска своего следующего проекта.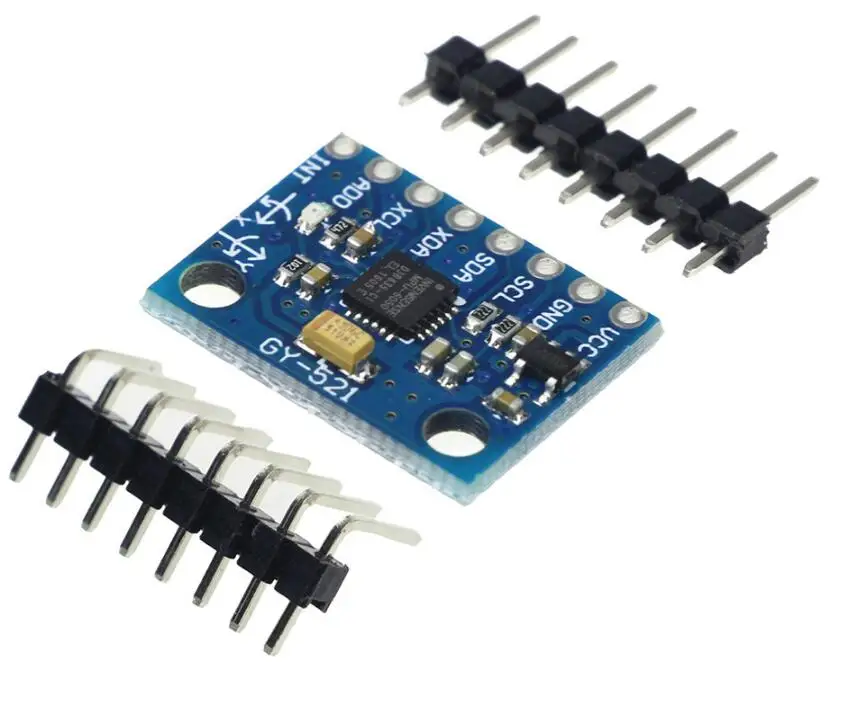 Тем не менее, при наличии множества доступных вариантов выбрать подходящий может оказаться сложной задачей.
Тем не менее, при наличии множества доступных вариантов выбрать подходящий может оказаться сложной задачей.
Прежде чем ломать голову над тем, как выбрать акселерометр и гироскоп, сначала нужно узнать разницу между ними.
В этом руководстве я расскажу вам следующее:
- Что такое акселерометр?
- Что такое гироскоп?
- В чем разница между акселерометром и гироскопом?
- Как выбрать акселерометр?
- Как выбрать гироскоп?
- Почетные упоминания IMU
Что такое акселерометр?
Акселерометры представляют собой электромеханические устройства, измеряющие ускорение, скорость изменения скорости объекта. Другими словами, это устройства, используемые для реагирования на любые вибрации, связанные с движением.
Как работает акселерометр?
Акселерометры работают двумя способами. Пьезоэлектрический эффект и изменение емкости. Звучит запутанно? Это относительно просто, вот как:
Пьезоэлектрический эффект: Ref
- Акселерометры содержат микроскопические кристаллические структуры, генерирующие напряжения при возникновении вибрации0010
Изменение емкости: ref
Этот метод использует формулу для определения ускорения.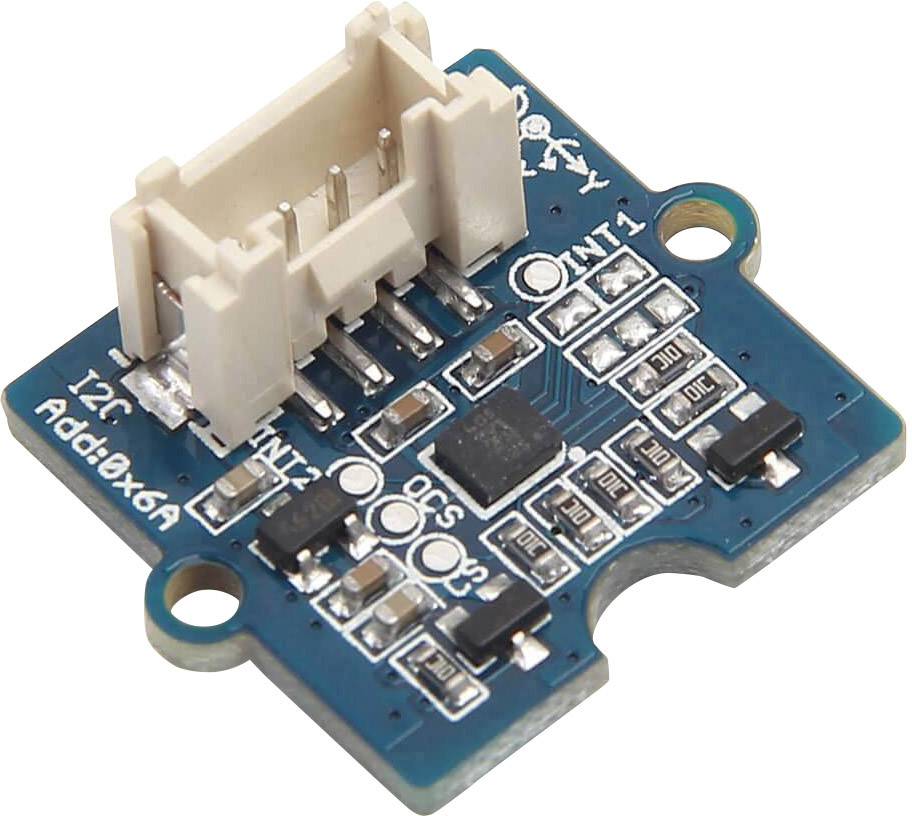 Поскольку мы знаем, что Сила = Масса х Ускорение, чтобы найти ускорение, потребуется Сила / Масса объекта.
Поскольку мы знаем, что Сила = Масса х Ускорение, чтобы найти ускорение, потребуется Сила / Масса объекта.
Вот как работает эффект емкости в МЭМС-акселерометре:
- Присутствуют 2 емкостные пластины
- Масса объекта давит на одну из пластин конденсатора, изменяя емкость и позволяя измерить силу
- Зная силу и массу объекта, можно измерить ускорение.
Акселерометры МЭМС
Акселерометры могут быть основаны на других принципах работы, например, акселерометры на основе микрочипов. В наши дни акселерометры Mems разработаны для простой интеграции с Arduino или другими микроконтроллерами, наиболее распространенными из которых являются датчики серии ADXL (популярными являются ADXL345, ADXL335).
Благодаря своим миниатюрным датчикам акселерометры Mems применимы для приложений IoT, маломощных, промышленных и автомобильных приложений, здравоохранения и т. д.
Приложения акселерометров
Теперь, когда мы поняли, как работает акселерометр, мы рассмотрим, для чего он обычно используется. Вот основной список приложений:
Вот основной список приложений:
- Приложения для компаса/карты на ваших смартфонах (iPhone, Andriod и т. д.) посредством определения оси
- Определение наклона; iPhone использует акселерометр, чтобы определить, находится ли телефон в книжной или альбомной ориентации
- Обнаружение землетрясения
- Датчик падения
- Медицинские устройства, такие как искусственные части тела
- Фитнес-трекеры/носимые устройства
- Игры/приложения, требующие обнаружения движения (Wii, Kinect и т. д.)
, скорость, вибрация и определение ориентации.
Что такое гироскоп?
Прежде чем мы коснемся различий, нам нужно сначала понять, что такое гироскоп. Гироскоп — это устройство, используемое для измерения изменений вращения или поддержания ориентации. Он основан на принципе сохранения углового момента.
Как работает гироскоп? ref
Типичный гироскоп содержит ротор, подвешенный внутри трех колец, называемых карданами.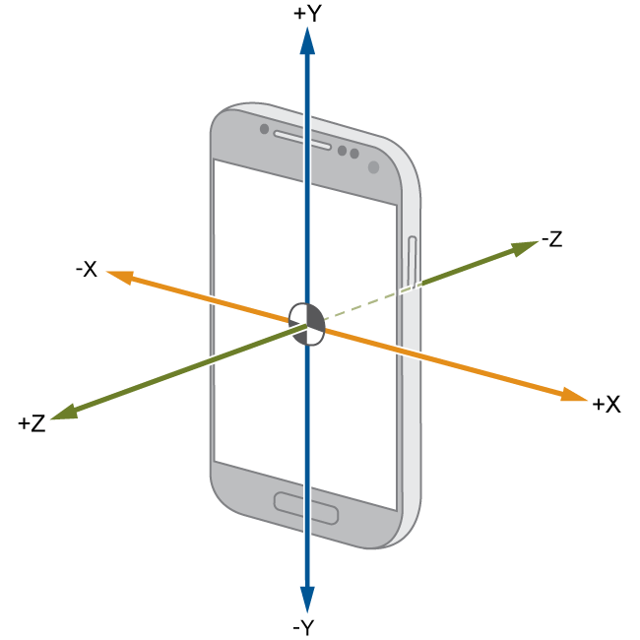
Работает за счет эффекта прецессии, позволяя гироскопам игнорировать гравитацию при вращении оси вращения. Это означает, что вместо того, чтобы упасть под действием силы тяжести, он автоматически отклоняется в сторону.
Чтобы узнать больше о том, как работают гироскопы, вы можете прочитать эту статью!
Приложения гироскопа
Понять, как он работает, это одно, но для чего он используется? Хотя гироскопы появились еще в 18 веке, они все еще используются и сейчас, став неотъемлемой частью навигационных систем, которые мы обычно видим в наши дни:
- Самолеты
- Космические станции
- Стабильность в транспортных средствах; мотоциклы, корабли
- Инерциальные системы наведения
- Бытовая электроника с помощью МЭМС-гироскопов (большинство телефонов Andriod среднего и высокого класса)
Гироскоп MEMS
Вам может быть интересно, что такое гироскопы MEMS? Разве гироскопы не просто гироскопы?
МЭМС-гироскопы представляют собой небольшие миниатюрные датчики, разработанные за счет интеграции в них технологии МЭМС (микроэлектромеханической системы). Это позволяет использовать функциональность гироскопов в меньшем корпусе!
Это позволяет использовать функциональность гироскопов в меньшем корпусе!
Подобно акселерометрам MEMS, с такой технологией он обеспечивает меньшую стоимость, меньшее энергопотребление и применимость к вашим Arduino, Raspberry Pi и многим другим!
Акселерометр и гироскоп
Разница между акселерометром и гироскопом:
Для простоты понимания разницы между акселерометром и гироскопом я привел сравнительную таблицу для иллюстрации:
Невозможно отличить вращение от ускорения
Не подвержено влиянию ускорения
В целом, несмотря на то, что оба устройства имеют свои заметные отличия, многие устройства по-прежнему выигрывают от наличия обоих датчиков.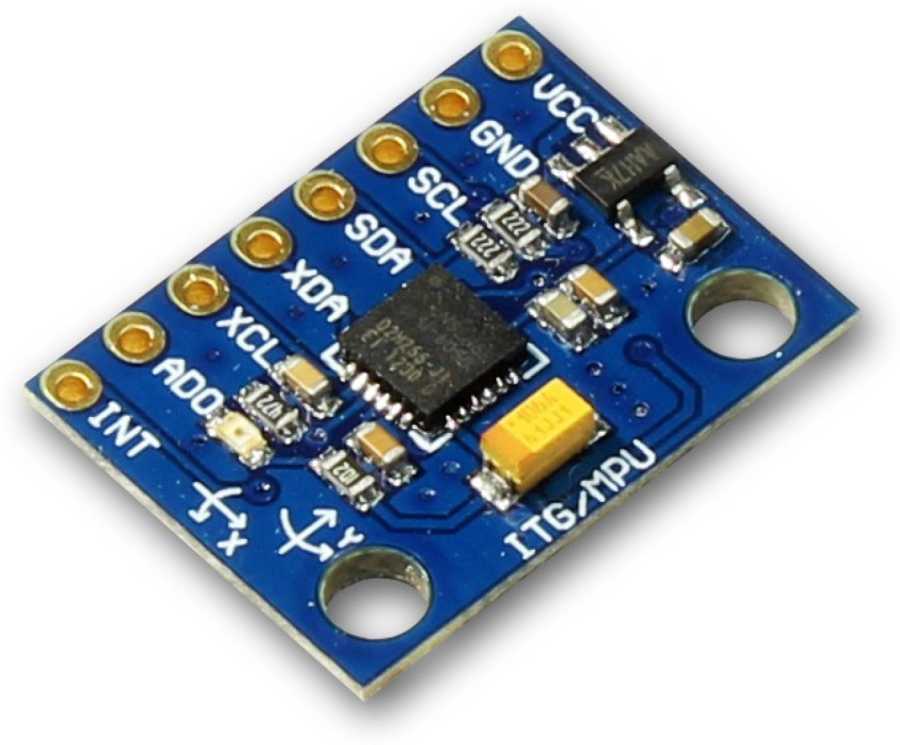 В конечном итоге все сводится к тому, какие приложения вы ищете.
В конечном итоге все сводится к тому, какие приложения вы ищете.
Как выбрать акселерометр и гироскоп?
Как выбрать акселерометр?
Чтобы помочь вам выбрать подходящий акселерометр MEMS для вашего Arduino, вот важные критерии, которые вы должны учитывать!
| Критерии | Рекомендации/Соображения |
|---|---|
| Диапазон | Для точных показаний: Выберите меньший диапазон полной шкалы, так как это даст вам более точные показания благодаря более чувствительному выходному сигналу. Рассмотрите диапазоны ускорения, подходящие для ваших проектов. |
| Интерфейс | Самый простой интерфейс для работы: Аналоговый интерфейс, так как аналого-цифровые преобразователи (АЦП) реализованы в большинстве микроконтроллеров Для создания фиксированной частоты: |
| Оси | Трехосевые акселерометры, наиболее распространенные и ненамного более дорогие по сравнению с одно- или двухосевыми акселерометрами |
| Энергопотребление | Требуемый ток потребления акселерометра обычно находится в диапазоне сотен мкА. Учитывайте требуемую мощность. |
| Бонусные функции | Выбор более новых моделей акселерометров может быть лучшим выбором, поскольку они включают в себя больше бонусных функций, таких как: Выбираемые диапазоны измерения Контроль сна Обнаружение 0-g Обнаружение постукивания |
Какой акселерометр купить?
Исходя из вышеперечисленных критериев, я рекомендую эти акселерометры, доступные в Seeed!
Grove — 3-осевой цифровой акселерометр со сверхнизким энергопотреблением ±16g (BMA400) функции триггерного прерывания. Обнаружение позы движения, такой как ходьба, бег, стоя на месте с легкостью!
Оценка критериев:
| Criteria | Evaluation |
| Range | ±2g, ±4g, ±8g, ±16g |
| Interface | I2C |
| No Из топов | 3-осевая |
| Использование мощности | 18UA @5V, 14UA @3,3V |
. 0166 Активность/бездействие 0166 Активность/бездействие Счетчик шагов Распознавание активности (ходьба, бег, стояние) Определение ориентации Касание/двойное касание |
Хотите узнать больше? Более подробная информация наряду с этим руководством по акселерометру Arduino доступна на нашей вики-странице здесь!
Серия 3-осевых акселерометров ADXL
Помимо вышеупомянутого акселерометра на базе BMA400, популярная серия ADXL также доступна для покупки здесь, в Seeed! Предлагаем вашему вниманию следующие 3-осевые акселерометры ADXL:
| Product | Measurement Range | Interface | Power Consumption | Bonus Features | |||||||||||||||||||||||||||||||||||
| Grove – 3-Axis Analog Accelerometer ±20g (ADXL356B) | ±10 ±20g | Analog | measurement режим: 150 мкА Режим ожидания: 21 мкА | Низкий, дрейф, низкий уровень шума; идеально подходит для беспроводного мониторинга состояния Герметичный корпус, обеспечивающий превосходную долговременную стабильность Смещение 0 г относительно температуры (по всем осям): 0,75 мг/°C максимум | |||||||||||||||||||||||||||||||||||
| Grove – 3-Axis Analog Accelerometer ±40g (ADXL356C) | ±10g ±40g | Analog | measurement mode:150 μA standby mode:21 μA | Low, drift, low noise; идеально подходит для беспроводного мониторинга состояния Герметичный корпус, обеспечивающий превосходную долговременную стабильность Смещение 0g в зависимости от температуры (по всем осям): максимум 0,75 мг/°C | |||||||||||||||||||||||||||||||||||
| Grove – 3-осевой цифровой акселерометр ±40g (ADXL357) | ±[email protected] LSB/g ±[email protected] LSB/g ±[email protected] LSB/g | Цифровой I2C | режим измерения: 200 мкА | Низкий дрейф, низкий уровень шума, малое энергопотребление временная стабильность Смещение 0g относительно температуры (все оси): максимум 0,75 мг/°C 200 г | Цифровой I2C | режим измерения: 22 мкА | Глубокий встроенный FIFO для минимизации нагрузки на хост-процессор (ADXL372) в настоящее время нет в наличии, но следите за их пополнением, подписавшись или рассмотрев ADXL356C и ADXL357! Как выбрать гироскоп? Теперь, когда вы поняли, как выбрать подходящий акселерометр, вот критерии, которые помогут вам с легкостью выбрать гироскоп!
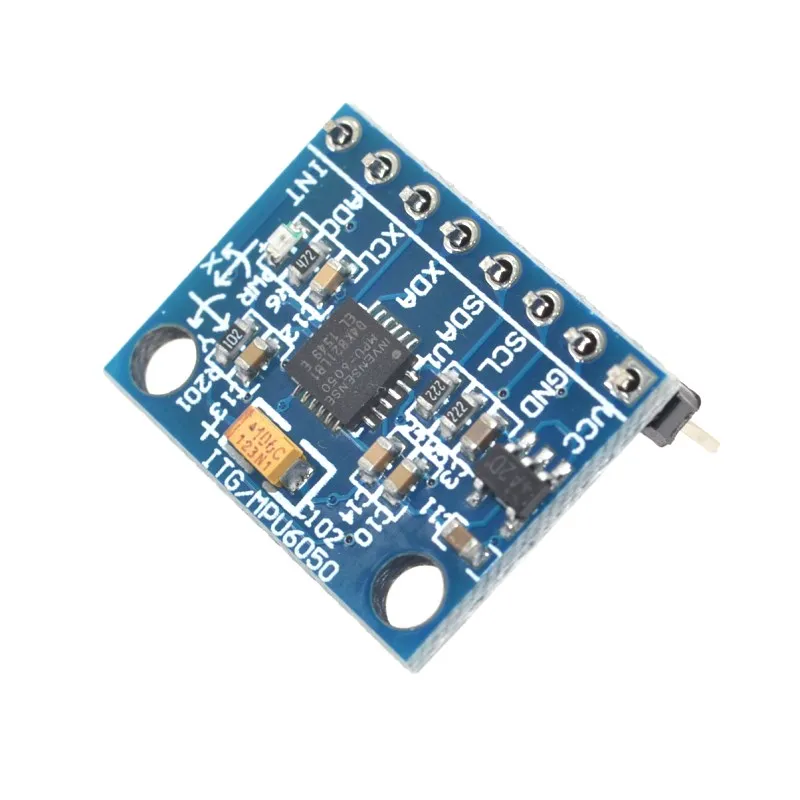
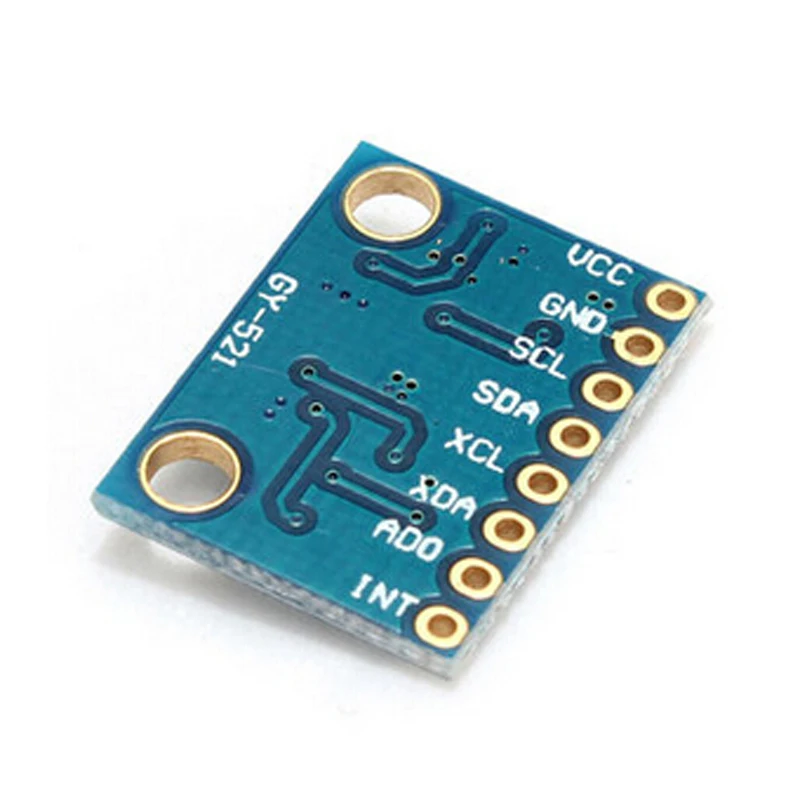
Какие гироскопы купить?Основываясь на вышеуказанных критериях, я рекомендую эти гироскопы к покупке! Примечание. Grove — 6-осевой акселерометр и гироскопОснованный на чипе LSM6DS3, этот 6-осевой акселерометр и гироскоп представляет собой экономичный вариант с подробным SDK для более простого программирования с помощью Arduino! Оценка критериев:
|
 Следующие рекомендации относятся к гироскопам, интегрированным вместе с акселерометром, что позволяет использовать их функции в одном модуле!
Следующие рекомендации относятся к гироскопам, интегрированным вместе с акселерометром, что позволяет использовать их функции в одном модуле! 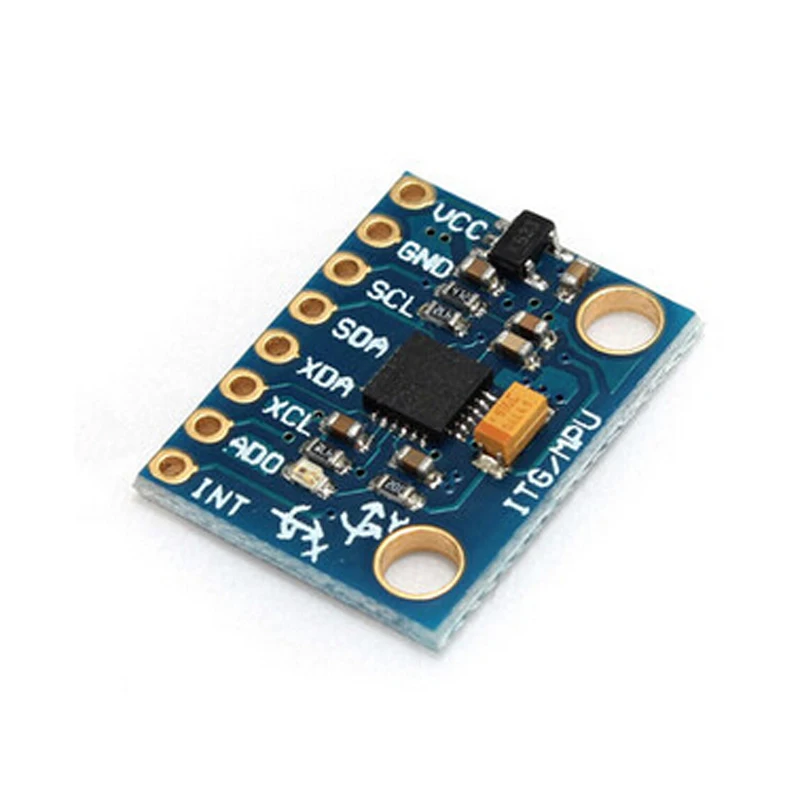 0163
0163 
 0 предоставляет вам в общей сложности 10 осей данных, гораздо больше приложений и лучшую производительность!
0 предоставляет вам в общей сложности 10 осей данных, гораздо больше приложений и лучшую производительность!  С ростом популярности обоих, действительно пришло время выбрать один для себя! Подходящий!
С ростом популярности обоих, действительно пришло время выбрать один для себя! Подходящий!  Вы знаете… как быстро что-то ускоряется или замедляется. Вы увидите ускорение, отображаемое либо в метрах в секунду в квадрате (м/с 2 ), либо в перегрузке (g), что составляет около 9,8 м/с 2 (точное значение зависит от вашей высоты и масса планеты, на которой вы находитесь).
Вы знаете… как быстро что-то ускоряется или замедляется. Вы увидите ускорение, отображаемое либо в метрах в секунду в квадрате (м/с 2 ), либо в перегрузке (g), что составляет около 9,8 м/с 2 (точное значение зависит от вашей высоты и масса планеты, на которой вы находитесь).  Наконец, акселерометр также можно использовать для определения того, находится ли устройство в состоянии свободного падения. Эта функция реализована в нескольких жестких дисках: при обнаружении падения жесткий диск быстро отключается для защиты от потери данных.
Наконец, акселерометр также можно использовать для определения того, находится ли устройство в состоянии свободного падения. Эта функция реализована в нескольких жестких дисках: при обнаружении падения жесткий диск быстро отключается для защиты от потери данных.  Большинство наших акселерометров настроены на жесткий максимальный/минимальный диапазон, однако некоторые из более сложных акселерометров имеют выбираемые диапазоны.
Большинство наших акселерометров настроены на жесткий максимальный/минимальный диапазон, однако некоторые из более сложных акселерометров имеют выбираемые диапазоны.  В зависимости от вашего опыта, их может быть труднее всего интегрировать с вашим микроконтроллером. Тем не менее, цифровые акселерометры популярны, потому что они обычно имеют больше функций и менее подвержены шуму, чем их аналоговые аналоги.
В зависимости от вашего опыта, их может быть труднее всего интегрировать с вашим микроконтроллером. Тем не менее, цифровые акселерометры популярны, потому что они обычно имеют больше функций и менее подвержены шуму, чем их аналоговые аналоги.  Эти более новые акселерометры могут включать в себя такие функции, как выбираемые диапазоны измерения, контроль сна, обнаружение 0-g и определение касания.
Эти более новые акселерометры могут включать в себя такие функции, как выбираемые диапазоны измерения, контроль сна, обнаружение 0-g и определение касания. 


 Диапазон акселерометра измеряется в перегрузках или кратно ускорению силы тяжести на Земле. Диапазон гироскопа, который измеряет угловое ускорение, выражается в градусах вращения в секунду.
Диапазон акселерометра измеряется в перегрузках или кратно ускорению силы тяжести на Земле. Диапазон гироскопа, который измеряет угловое ускорение, выражается в градусах вращения в секунду. 
