Как установить и настроить CoIDE для разработки под ARM Cortex-M. Какие компоненты входят в состав среды разработки CoIDE. Как создать первый проект в CoIDE и загрузить его в микроконтроллер. Какие особенности имеет CoIDE по сравнению с другими IDE.
Что такое CoIDE и для чего она предназначена
CoIDE (CooCox IDE) — это бесплатная интегрированная среда разработки для микроконтроллеров с ядром ARM Cortex-M. Она предоставляет полный набор инструментов для разработки встраиваемых систем, включая редактор кода, компилятор, отладчик и программатор.
Основные возможности CoIDE:
- Поддержка микроконтроллеров STM32, LPC, Kinetis и других на базе Cortex-M
- Встроенный компилятор GCC
- Интегрированный отладчик
- Программатор для прошивки микроконтроллеров
- Менеджер библиотек и драйверов периферии
- Генератор кода инициализации периферии
Компоненты среды разработки CoIDE
В состав CoIDE входят следующие основные компоненты:

- IDE — интегрированная среда разработки с редактором кода
- GCC — компилятор GNU для ARM
- GDB — отладчик GNU
- OpenOCD — программа для внутрисхемной отладки
- CoFlash — утилита для программирования Flash-памяти микроконтроллеров
- CoCenter — менеджер библиотек и обновлений
Все эти компоненты интегрированы в единую среду, что упрощает процесс разработки.
Как установить CoIDE на Windows
Процесс установки CoIDE включает следующие шаги:
- Скачать установщик CoIDE с официального сайта
- Запустить установщик и следовать инструкциям мастера установки
- Выбрать папку для установки (по умолчанию C:\CooCox\CoIDE)
- Выбрать компоненты для установки (рекомендуется устанавливать все)
- Дождаться завершения процесса установки
После установки CoIDE будет готова к использованию. Дополнительно может потребоваться установка драйверов для программатора ST-Link или J-Link.
Первый запуск и настройка CoIDE
При первом запуске CoIDE предложит выполнить начальную настройку:
- Выбор рабочей директории для проектов
- Настройка путей к компилятору и отладчику
- Выбор программатора (ST-Link, J-Link и др.)
- Установка дополнительных библиотек через CoCenter
Рекомендуется оставить настройки по умолчанию, если нет особых требований. Для работы с конкретным микроконтроллером может потребоваться установка соответствующих библиотек через менеджер CoCenter.
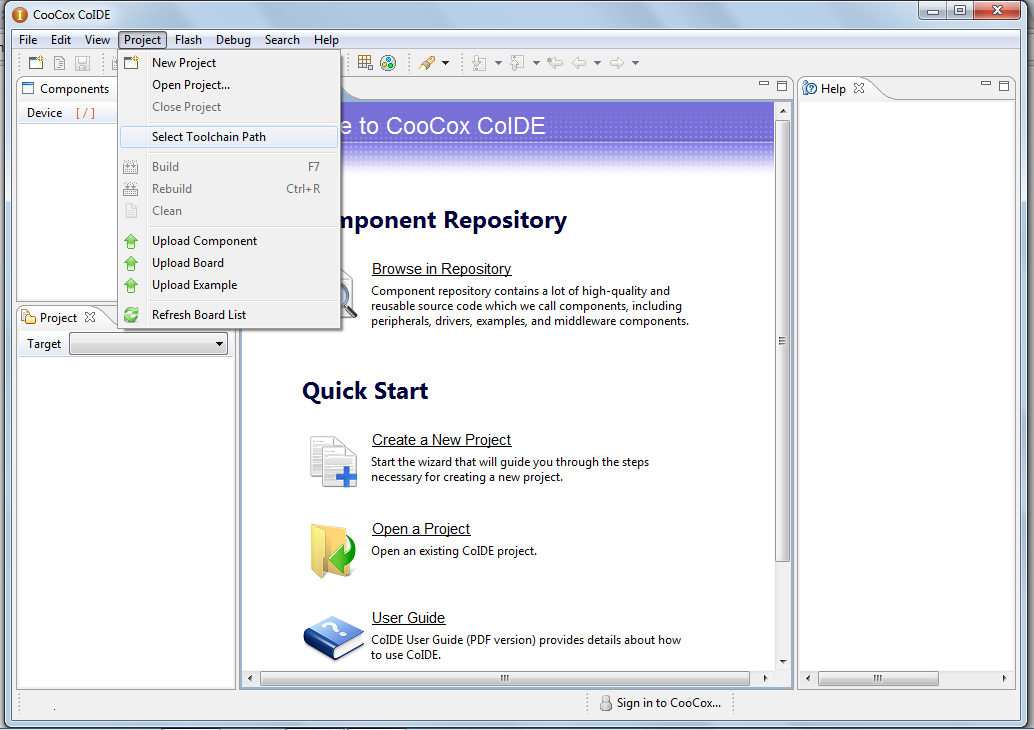
Создание первого проекта в CoIDE
Чтобы создать новый проект в CoIDE, нужно выполнить следующие шаги:
- Выбрать File -> New Project
- Указать имя и расположение проекта
- Выбрать целевой микроконтроллер
- Добавить необходимые библиотеки через CoCenter
- Сгенерировать код инициализации периферии
- Написать основной код программы
- Скомпилировать проект
После этого проект будет готов к отладке и загрузке в микроконтроллер.
Особенности отладки проектов в CoIDE
CoIDE предоставляет широкие возможности для отладки проектов:
- Пошаговое выполнение кода
- Установка точек останова
- Просмотр значений переменных и регистров
- Отладка в реальном времени
- Трассировка выполнения программы
Для отладки используется встроенный GDB-сервер, который взаимодействует с программатором. Это позволяет отлаживать код непосредственно на целевом устройстве.
Программирование микроконтроллеров через CoIDE
CoIDE имеет встроенный программатор CoFlash, который позволяет записывать прошивку в Flash-память микроконтроллера. Процесс программирования включает следующие этапы:

- Подключение программатора к микроконтроллеру
- Выбор файла прошивки (.hex или .bin)
- Настройка параметров программирования
- Запуск процесса записи в память
- Верификация записанных данных
CoFlash поддерживает большинство популярных программаторов, включая ST-Link, J-Link, CMSIS-DAP и др.
Преимущества CoIDE по сравнению с другими средами разработки
CoIDE имеет ряд преимуществ по сравнению с аналогичными IDE:
- Бесплатность и открытый исходный код
- Легкость установки и настройки
- Интуитивно понятный интерфейс
- Широкая поддержка микроконтроллеров
- Встроенный менеджер библиотек
- Генератор кода инициализации периферии
- Низкие системные требования
Это делает CoIDE отличным выбором для начинающих разработчиков и небольших проектов на микроконтроллерах ARM Cortex-M.
Ограничения и недостатки CoIDE
Несмотря на множество достоинств, у CoIDE есть и некоторые ограничения:
- Отсутствие поддержки микроконтроллеров не на базе Cortex-M
- Отсутствие встроенного симулятора
- Нерегулярные обновления и поддержка
- Отсутствие расширенных инструментов для командной разработки
Однако для большинства любительских и учебных проектов этих ограничений не будет заметно.

Альтернативы CoIDE для разработки под ARM
Существует несколько альтернативных сред разработки для микроконтроллеров ARM:
- Keil uVision — профессиональная IDE, но платная
- IAR Embedded Workbench — мощная среда, также платная
- Eclipse + GNU ARM Tools — бесплатная, но сложнее в настройке
- STM32CubeIDE — бесплатная IDE от STMicroelectronics
- Visual Studio Code + PlatformIO — современное решение для IoT
Выбор конкретной IDE зависит от требований проекта, бюджета и личных предпочтений разработчика.
Заключение
CoIDE представляет собой удобную и функциональную среду разработки для микроконтроллеров ARM Cortex-M. Она отлично подходит для обучения, прототипирования и небольших проектов. Простота установки и использования делает CoIDE хорошим выбором для начинающих разработчиков встраиваемых систем.
STM32:Основы — Установка ПО — Cybergnosis.su
Эта заметка посвящена иллюстрированному рассказу об установке программ, кратко описанных в предыдущей записи.
При описании дальнейших действий предполагается, что у Вас есть права Администратора для системы, в которой эти действия будут совершаться. Так же, одним из общих для установки всех программ шагом, является согласие на запуск приложения в диалоге Системы безопасности, появляющегося после запуске скачанных по сети файлов.
Установка CooCox CoIDE
Со страницы разработчика на момент написания этой заметки можно скачать как новую версию CoIDE-V2Beta-20160607.exe, так и предыдущую — CoIDE-1.7.8.exe. Установив новую версию я столкнулся с несколькими проблемами. Во первых — перестали нормально открываться мои проекты, созданные в предыдущих версиях. Не находилась информация с описанием используемого МК. Во вторых, новые проекты так же для используемого МК не удавалось создать. Поискав решения данной проблемы в Гугле, и опробовав их, я увидел, что они не дают результата, и что с подобными проблемами сталкиваюсь не я один. Поэтому, я решил не мучиться с настройкой бета-версии, а установить предыдущую и стабильную 1.7.8. Её можно было скачать со страницы приложения по ссылке http://www.coocox.org/download/Tools/CoIDE-1.7.8.exe, однако, проверив сейчас эту ссылку, я получил 404 Not Found. Не знаю, какими причинами это вызвано, и долго ли продлится, но проблему можно легко решить. (На момент публикации 27.09.2016 проблема решена и CoIDE версии 1.7.8 с сайта разработчика благополучно загружается.)
Поэтому, я решил не мучиться с настройкой бета-версии, а установить предыдущую и стабильную 1.7.8. Её можно было скачать со страницы приложения по ссылке http://www.coocox.org/download/Tools/CoIDE-1.7.8.exe, однако, проверив сейчас эту ссылку, я получил 404 Not Found. Не знаю, какими причинами это вызвано, и долго ли продлится, но проблему можно легко решить. (На момент публикации 27.09.2016 проблема решена и CoIDE версии 1.7.8 с сайта разработчика благополучно загружается.)
Идём на web.archive.org, копируем в верхнюю строку поиска http://www.coocox.org/software/coide.php, нажимаем BROWSE HISTORY, выбираем 2016 год, и в открывшемся окне с календарём 2016 года выбираем 5 марта. После этого открывается заархивированная страница, по ссылке с которой скачиваем предыдущую версию. Ссылка, по которой скачивал я — CoIDE-1.7.8, но не знаю, будет ли она работать в дальнейшем, как раз и проверим. Если же, по каким либо причинам версию CoIDE-1.7.8 не удастся скачать с заархивированной странице с указанной датой, можно попробовать поискать по другим архивным точкам.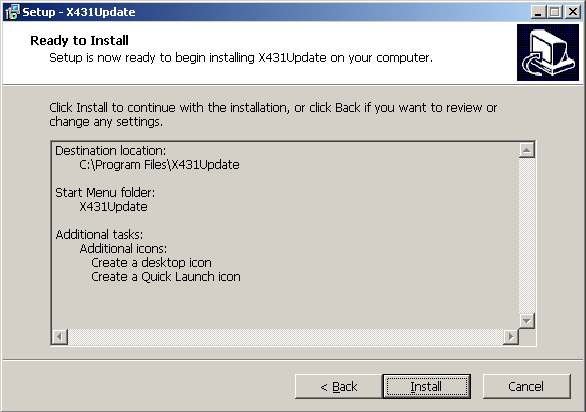
И так, установщик CoIDE-1.7.8 скачан. Запускаем его. Видим открывшееся диалоговое окно установщика:
Жмём Next. Мастер установки предлагает нам выбрать папку, в которую мы установим среду разработки. Если есть смысл менять, попробуйте изменить. И жмём опять Next.
На следующей странице установщик запрашивает имя для ярлыка стартового меню. Если надо — меняем, и жмём Next.
Далее предлагается сделать выбор — устанавливать или нет строго рекомендуемый для установки CoCenter, который является менеджером запуска, загрузок и обновлений. Для текущих целей изучения необходимости в нём нет. Поэтому галочку убираю. Если будет нужно — можно установить и потом.
Жмём опять Next. Появившаяся страница сообщает о выбранной установочной папке и имени для ярлыка меню. Здесь предлагается нажать Install. Жмём.
Начинается процесс установки, который может занять несколько минут.
По завершении установки, если всё прошло успешно, видим страницу установщика, с соответствующим сообщением, и предложением нажать Finish для выхода. Что и делаем.
Что и делаем.
Процесс установки CoIDE-1.7.8 завершён.
Установка GNU ARM Embedded Toolchain
Идём на страницу загрузки тулчейна и скачиваем установщик его последней версии. Прямая ссылка для загрузки последней версии на момент написания заметки — gcc-arm-none-eabi-5_4-2016q2-20160622-win32.exe.
Запускаем. Появляется сообщение с предложением выбрать язык для установщика. Можно попробовать выбрать русский, но, лично у меня, это вызвало появление в установочном диалоге крякозябров. Жмём ОК.
Появляется окно мастера установки, с предложением закрыть все работающие приложения, так как это может сделать возможным обновление всех затрагиваемых системных файлов без необходимости перезагрузки системы. Можно последовать совету и нажать Next.
Далее предлагается принять условия лицензионного соглашения, текст которого приводится. Если принимаем — жмём I Agree.
После этого будет предложено выбрать папку для установки, а так же показаны сведения о требуемом и доступном дисковом пространстве. Если есть необходимость — папку установки меняем, хотя, я с этим не экспериментировал, и не знаю, как поведёт себя CoIDE, если окажется, что в пути к компилятору будут содержаться кириллические символы, или будет превышена определённая длина пути. С другими средствами разработки подобные проблемы встречать приходилось. Жмём Install.
Если есть необходимость — папку установки меняем, хотя, я с этим не экспериментировал, и не знаю, как поведёт себя CoIDE, если окажется, что в пути к компилятору будут содержаться кириллические символы, или будет превышена определённая длина пути. С другими средствами разработки подобные проблемы встречать приходилось. Жмём Install.
Начинается процесс установки, который так же может занять несколько минут.
По завершении установки появляется страница мастера, сообщающая о завершении установки, предлагающая выбрать несколько действий, которые будут совершены после нажатия кнопки Finish. Можно оставить всё как есть и нажать Finish.
Установка тулчейна завершена. Можно просмотреть открывшийся файл readme на предмет того, о чём там, вообще, идёт речь.
Установка STM32 ST-LINK utility
Идём на страницу утилит. В верху, с левой стороны, видим надпись «STM32 ST-LINK utility». Прокручиваем к низу страницы, там находим раздел: GET SOFTWARE, а в нём, справа, кнопочка — Get Software. Нажимаем на неё, появляется листок с надписью — License Agreement и кнопкой Accept. Жмём на ней, если принимаем. Далее появляется листок с надписью: «Get Software». На нём можно нажать Login/Register, если зарегистрированы на сайте или хотите это сделать. Можно ниже просто ввести имя, фамилию, e-mail и нажать Download. После этого на указанный e-mail придёт письмо со ссылкой, по которой можно скачать архив с инсталлятором утилит.
Нажимаем на неё, появляется листок с надписью — License Agreement и кнопкой Accept. Жмём на ней, если принимаем. Далее появляется листок с надписью: «Get Software». На нём можно нажать Login/Register, если зарегистрированы на сайте или хотите это сделать. Можно ниже просто ввести имя, фамилию, e-mail и нажать Download. После этого на указанный e-mail придёт письмо со ссылкой, по которой можно скачать архив с инсталлятором утилит.
Итак, утилиты скачаны, открываем архив, запускаем их. Открывается окно с приветствием мастера установки. Жмём Next.
Появляется страница с лицензионным соглашением. Если согласны, жмём Yes.
Появляется страница с выбором установочной папки. Если надо — изменяем, и жмём Next.
Начинается процесс установки.
В ходе его дополнительно запускается мастер установки драйверов программатора/отладчика и переходника USB->UART. Жмём на нём Next.
Появляется страница, с сообщением о благополучной установке драйверов. Жмём Finish.
Жмём Finish.
Мастер установки утилит так же сообщает о благополучном завершении установки. Жмём Finish.
Утилиты программатора/отладчика и драйвера к нему благополучно установлены.
Установка Git.
Идём на страницу загрузки Git. Выбираем инсталлятор в соответствии с системой — 32 или 64. Можно выбрать и для переносной системы. Скачав — запускаем. Появляется окно мастера установки с лицензионным соглашением. Жмём Next.
Появляется страница с выбором установочной папки. Если нужно — выбираем и жмём Next.
Появляется страница с выбором дополнительных опций установки. Если что-то хотим — меняем. Next.
Появляется страница с выбором имени программы в стартовом меню. Next.
На появившейся странице предлагается выбор PATH окружения, от которого зависит, через какой командный интерпретатор Git будет вызываться, а так же возможность использования дополнительных Unix-утилит. Можно изменить. Я оставляю по умолчанию.
Далее предлагается выбрать используемый SSH клиент. Можно попробовать выбрать. Я оставляю без изменений. Next.
Появляется страница конфигурации стиля окончания строки. Изначально я выбрал первое значение, но потом изменил его на третье — Commit as is, checkout as is — через интерфейс командной строки:
git config --global core.autocrlf false
так как проект данный не кросс-платформенный, и преобразования для него ни к чему, только может приводить к выводу лишних предупреждений. Next.
На следующей странице предлагается выбрать эмулятор терминала для сессий Git Bash. Описываются преимущества и недостатки каждого способа. Можно изменить, я оставляю по умолчанию. Next.
Далее предлагается выбор дополнительных опций. Оставляю по умолчанию. После этого можно начать собственно процесс установки. Install.
Сам процесс установки довольно быстрый, по сравнению с предыдущими программами.
По завершении данного процесса появляется страница с сообщением об окончании установки и выбором дополнительных действий, после нажатия кнопки Finish. Можно все галочки снять. Finish.
Можно все галочки снять. Finish.
В следующей заметке цикла я планирую рассказать о дополнительной настройке IDE, создании локального репозитория Git и клонировании проектов из удалённого репозитория, а так же сборки первого проекта и загрузки его в устройство для проверки работоспособности установленного ПО и его настроек.
Кратко об используемом ПО
Настройка ПО и проверка конфигурации
Система обнаружения препятствий для мобильной роботизированной платформы
Когочев Антон Юрьевич1, Лекарев Алексей Олегович2, Гоноболев Александр Сергеевич3, Комендатенко Светлана Дмитриевна4
1Петрозаводский государственный университет, к.ф.-м.н., доцент кафедры информационно-измерительных систем и физической электроники
2Петрозаводский государственный университет, студент физико-технического факультета
3Петрозаводский государственный университет, студент физико-технического факультета
4Петрозаводский государственный университет, студент физико-технического факультета
Аннотация
В статье представлена система обнаружения препятствий для мобильной роботизированной платформы. Приведена общая схема работы системы, включающей в себя управляющий контроллер Flymaple v1.1 и набор ультразвуковых датчиков. Также описан алгоритм работы системы обнаружения препятствий.
Приведена общая схема работы системы, включающей в себя управляющий контроллер Flymaple v1.1 и набор ультразвуковых датчиков. Также описан алгоритм работы системы обнаружения препятствий.
Ключевые слова: автономный робот, датчики расстояния, микроконтроллерная плата, мобильная платформа, система обнаружения препятствий, система управления
Kogochev Anton Yurievich1, Lekarev Alexei Olegovych2, Gonobolev Alexander Sergeevich3, Komendatenko Svetlana Dmitrievna4
1Petrozavodsk State University, PhD, Assistant Professor of Department of Information Measuring Systems and Physical Electronics
2Petrozavodsk State University, student of Faculty of Physical Engineering
3Petrozavodsk State University, student of Faculty of Physical Engineering
4Petrozavodsk State University, student of Faculty of Physical Engineering
Abstract
Obstacle detection system for a mobile robotic platform is presented in the article.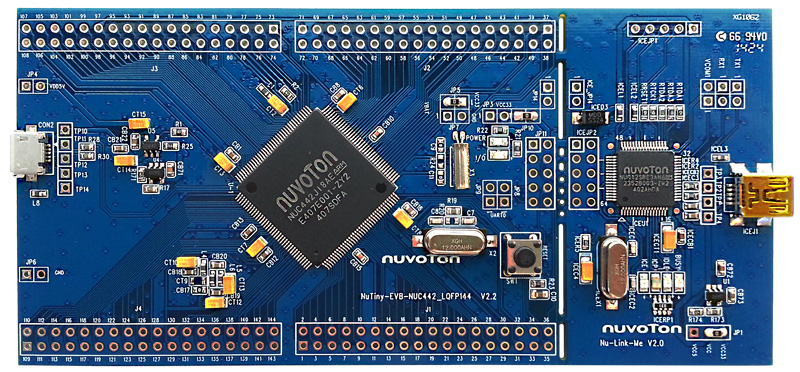
Keywords: autonomous robot, control system, microcontroller board, mobile platform, obstacle detection system, range sensors
Библиографическая ссылка на статью:
Когочев А.Ю., Лекарев А.О., Гоноболев А.С., Комендатенко С.Д. Система обнаружения препятствий для мобильной роботизированной платформы // Современная техника и технологии. 2015. № 12 [Электронный ресурс]. URL: https://technology.snauka.ru/2015/12/8799 (дата обращения: 14.09.2022).
Введение
Одной из главных задач в мобильной подвижной робототехнике является проблема обнаружения препятствий как неподвижных, так и движущихся. Решение такой задачи открывает пути к разработке систем маршрутизации роботов. Как правило, для передвижения по известному маршруту используются системы глобального позиционирования. Однако такой способ не всегда достаточно надёжен, поскольку имеет значительную погрешность по отношению к размерам самого робота, а в закрытых помещениях и вовсе может не работать. Для уточнения положения робота относительно других объектов используются в основном системы технического зрения в оптическом диапазоне на основе стандартных видеокамер и видеокамер, работающих в инфракрасной части спектра [1, 2]. Системы технического зрения позволяют получить больше информации об окружающих объектах, но в определённых условиях вполне достаточно знать лишь о присутствии того или иного предмета на пути движения робота. В таких ситуациях способом решения проблемы относительного позиционирования является использование датчиков разной физической природы.
Однако такой способ не всегда достаточно надёжен, поскольку имеет значительную погрешность по отношению к размерам самого робота, а в закрытых помещениях и вовсе может не работать. Для уточнения положения робота относительно других объектов используются в основном системы технического зрения в оптическом диапазоне на основе стандартных видеокамер и видеокамер, работающих в инфракрасной части спектра [1, 2]. Системы технического зрения позволяют получить больше информации об окружающих объектах, но в определённых условиях вполне достаточно знать лишь о присутствии того или иного предмета на пути движения робота. В таких ситуациях способом решения проблемы относительного позиционирования является использование датчиков разной физической природы.
В данной работе представлена разрабатываемая система определения препятствий на основе ультразвуковых датчиков для мобильной роботизированной платформы грузоподъёмностью до 80 кг для передвижения по пересечённой местности.
Система обнаружения препятствий
Разрабатываемая на кафедре информационно-измерительных систем и физической электроники Петрозаводского государственного университета система обнаружения препятствий для мультикоптера [3] использовалась в качестве основы при подготовке такого рода системы для наземного мобильного робота. Для этого в систему обнаружения препятствий был внесён ряд изменений, обусловленный снижением требований к массогабаритным показателям и ужесточением таковых вследствие увеличения числа ультразвуковых датчиков.
Для этого в систему обнаружения препятствий был внесён ряд изменений, обусловленный снижением требований к массогабаритным показателям и ужесточением таковых вследствие увеличения числа ультразвуковых датчиков.
Система состоит из:
- управляющей платы Flymaple v1.1 на основе микроконтроллера STM32F103RET6 фирмы STMicroelectronics [4];
- комплекта ультразвуковых датчиков расстояния [5].
Общая схема работы системы изображена на рисунке 1.
Рисунок 1. Схема работы системы обнаружения препятствий для мобильной роботизированной платформы
Для оценки окружающего пространства используется набор ультразвуковых датчиков. Дальномеры закрепляются на платформе, так чтобы перекрывать область передней и задней полусфер. Основной подход состоит в том, чтобы корректировать управляющее воздействие оператора платформы на основе информации о расстоянии до окружающих объектов. Для этого постоянно осуществляется измерение расстояния до окружающих объектов, а затем по мере необходимости в канал управления роботизированной платформой вносится корректирующий сигнал.
Результаты
Программное обеспечение для микроконтроллерной платы Flymaple v1.1 разработано в среде программирования CooCox CoIDE [6] и реализует следующие функции:
- перехват и фиксация параметров управляющего сигнала от оператора;
- измерение расстояний с помощью ультразвуковых датчиков;
- формирование управляющего сигнала для платы управления мобильной роботизированной платформой, провоцирующего остановку или движение платформы в сторону от препятствия.
Алгоритм работы программного обеспечения для управляющего контроллера на основе STM32F103RET6 выглядит следующим образом. Системный таймер платы Flymaple v1.1 раз в 20 мс осуществляет запуск процедуры захвата управляющего сигнала в двух каналах. Для этого используется система внешних прерываний микроконтроллера STM32F103RET6. Кроме того, одновременно запускается процесс измерения расстояния с помощью ультразвуковых дальномеров. После того как будет получена информация со всех дальномеров, осуществляется процедура сравнения результатов, и в случае обнаружения объекта в направлении движения на расстоянии меньше заданного, плата Flymaple v1.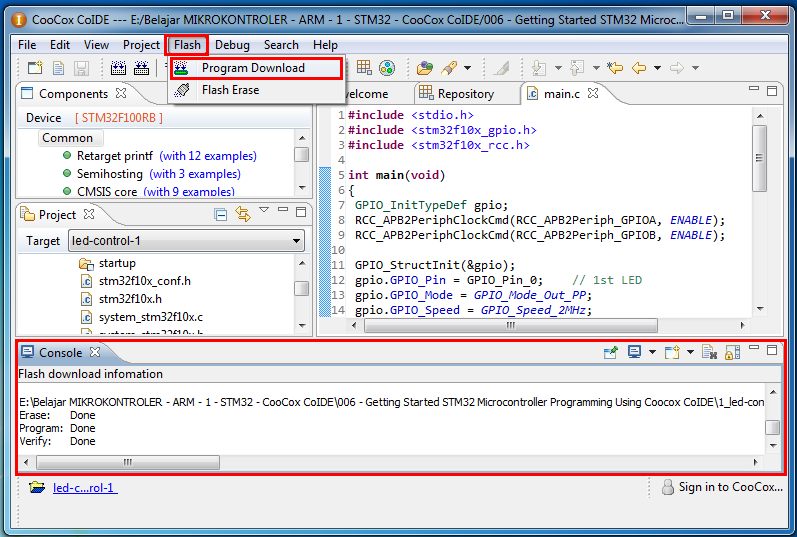 1 подаёт корректирующий сигнал плате управления роботизированной платформой. При этом управляющий сигнал от оператора не учитывается. Робот корректирует своё движение или останавливается, после чего сигнал от оператора снова беспрепятственно передаётся в контур управления.
1 подаёт корректирующий сигнал плате управления роботизированной платформой. При этом управляющий сигнал от оператора не учитывается. Робот корректирует своё движение или останавливается, после чего сигнал от оператора снова беспрепятственно передаётся в контур управления.
Расстояния до объектов в пространстве, полученные в результате измерений, сохраняются в отдельном буфере и могут быть переданы оператору с помощью средств телеметрии.
Заключение
В результате тестирования и отладки системы обнаружения препятствий при движении вдоль основных направлений подтверждена общая корректность выходного управляющего сигнала. Поведение роботизированной платформы соответствует ожидаемой безопасной реакции на наличие ограниченных или непреодолимых препятствий.
Отметим, что разработанная система может быть интегрирована в системы технического зрения на основе видеокамер. А подходы, использованные при её разработке, планируется использовать в проекте по созданию робота-гида для Петрозаводского государственного университета [7].
Работа выполнена в рамках проекта «Разработка опытного образца мобильной роботизированной платформы грузоподъёмностью до 80 кг для передвижения по пересечённой местности» программы стратегического развития ПетрГУ на 2012-2016 гг.
Библиографический список
- Соколов С. М., Платонов А. К., Богуславский А. А. Бесконтактная одометрия в составе бортовых навигационных систем // Известия Южного федерального университета. Технические науки. 2010. Т. 104. № 3. [Электронный ресурс]. URL: http://cyberleninka.ru/article/n/beskontaktnaya-odometriya-v-sostave-bortovyh-navigatsionnyh-sistem (дата обращения: 10.11.2015).
- Кий К. И., Серединский М. В.. Система технического зрения робота «Амур» для движения на ориентиры // Труды международной научно-технической конференции «Экстремальная робототехника». – СПб: Изд-во «Политехника-сервис». – 416 с.
- Гоноболев А.С., Когочев А.Ю., Лекарев А.О. Система обнаружения препятствий для мультикоптера // Resources and Technology.
 2014. Т. 11. № 2 [Электронный ресурс]. URL: http://rt.petrsu.ru/files/pdf/2902.pdf (дата обращения: 10.12.2015).
2014. Т. 11. № 2 [Электронный ресурс]. URL: http://rt.petrsu.ru/files/pdf/2902.pdf (дата обращения: 10.12.2015). - Flymaple V1.1 (SKU:DFR0188). [Электронный ресурс]. URL: http://www.dfrobot.com/wiki/index.php?title=Flymaple_V1.1(SKU:DFR0188) (дата обращения: 11.12.2015).
- Grove – Ultrasonic Ranger. [Электронный ресурс]. URL: http://www.seeedstudio.com/depot/Grove-Ultrasonic-Ranger-p-960.html?cPath=25_31 (дата обращения: 11.12.2014).
- CooCox Free/open ARM Cortex-M Development Tool-chain. [Электронный ресурс]. URL: http://www.coocox.org/software/coide.php (дата обращения: 12.12.2015).
- Щеголева Л. В., Когочев А. Ю. Подходы к построению робота-гида // Научные исследования: от теории к практике : материалы V Междунар. науч.-практ. конф. (Чебоксары, 06 нояб. 2015 г.) / редкол.: О. Н. Широков [и др.]. – Чебоксары: ЦНС «Интерактив плюс», 2015. – № 4 (5). – С. – ISSN 2413-3957. Режим доступа: https://interactive-plus.ru/e-articles/196/Action196-13464.pdf
Все статьи автора «antkg»
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте или через форму обратной связи.
Загрузка программного обеспечения CooCox | SourceForge.net
Прислано вам: honeyjime
Получить обновления
ФИО
Номер телефона
Название работы
Промышленность
Компания
Размер компании Размер компании: 1 — 2526 — 99100 — 499500 — 9991,000 — 4,9995,000 — 9,99910,000 — 19,99920,000 или более
Получайте уведомления об обновлениях для этого проекта. Получите информационный бюллетень SourceForge. Получайте информационные бюллетени и уведомления, содержащие новости сайта, специальные предложения и эксклюзивные скидки на ИТ-продукты и услуги.
Я понимаю, что нажав кнопку ниже, я соглашаюсь с Условиями и положениями SourceForge. Я согласен получать эти сообщения от SourceForge.net. Я понимаю, что могу отозвать свое согласие в любое время. Пожалуйста, ознакомьтесь с нашими Условиями использования и Политикой конфиденциальности или свяжитесь с нами для получения более подробной информации.
Я понимаю, что нажав кнопку ниже, я соглашаюсь с Условиями и положениями SourceForge. Я согласен получать эти сообщения от SourceForge.net. Я понимаю, что могу отозвать свое согласие в любое время. Пожалуйста, ознакомьтесь с нашими Условиями использования и Политикой конфиденциальности или свяжитесь с нами для получения более подробной информации.
Для этой формы требуется JavaScript.
Кажется, вы отключили CSS. Пожалуйста, не заполняйте это поле.
Кажется, вы отключили CSS. Пожалуйста, не заполняйте это поле.
Нет, спасибо
Поделись
CooCox-Cooperate on Cortex стремится предоставлять пользователям бесплатные и открытые инструменты разработки ARM Cortex M, включая бесплатный и открытый эмулятор, бесплатную и открытую ОС, бесплатную IDE, бесплатный отладчик, бесплатный Flash Programmer и бесплатный помощник по регистрации.
Деятельность по проекту
Просмотреть все действия >
{{ this.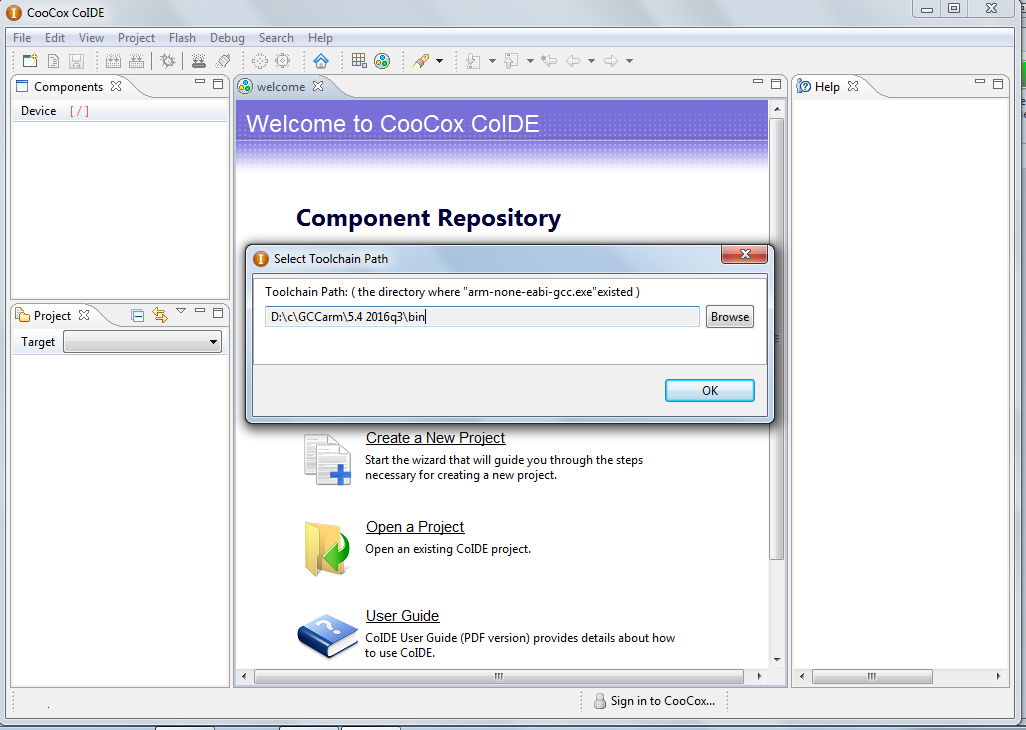 obj.activity_extras.summary }}
obj.activity_extras.summary }}
{{/каждый}}
Программное обеспечение CooCox
Веб-сайт программного обеспечения CooCox
Программное обеспечение для отслеживания проблем и проектов для Agile-команд | Jira
Средство разработки программного обеспечения №1, используемое agile-командами
Jira, которой доверяют тысячи команд, предлагает доступ к широкому спектру инструментов для планирования, отслеживания и выпуска программного обеспечения мирового класса, сбора и организации проблем, распределения задач, и после командной активности. Он также интегрируется с ведущими инструментами разработчиков для сквозной прослеживаемости.
Узнать больше
Оцените этот проект
Войдите, чтобы оценить этот проект
Рейтинг пользователей
5,0 из 5 звезд★★★★★
★★★★
★★★
★★
★
легкость 1 из 5 2 из 5 3 из 5 4 из 5 5 из 5 5 / 5
функции 1 из 5 2 из 5 3 из 5 4 из 5 5 из 5 5 / 5
дизайн 1 из 5 2 из 5 3 из 5 4 из 5 5 из 5 5 / 5
поддержка 1 из 5 2 из 5 3 из 5 4 из 5 5 из 5 1 / 5
Отфильтровать отзывы:
Все
-
Он мертв.
 .. Печаль
.. Печаль
Дополнительные сведения о проекте
2010-03-25Сообщить о неприемлемом содержимом
|
>>Модель: CoLinkEx >>Цена: ¥90.00 >> Руководство пользователя >> Драйверы >> Прошивка >> Программное обеспечение Обзор : CooCox CoLinkEx — аппаратная отладка Функция : — Отладка устройства Cortex M — Отладка ПО — Отладка JTAG — поддержка CoFlash, CoIDE, MDK и IAR Печатная плата HD : Плата разработки CoLinkEx Connect STM32 : Инструкции по обновлению прошивки : — Короткое замыкание JP1. Похожие записи
|