Как работает инфракрасный дальномер Sharp GP2Y0A02YK0F. Каковы его основные характеристики и диапазон измерения. Для чего используется этот датчик в робототехнике и электронных проектах. Как подключить и запрограммировать ИК-дальномер с Arduino.
Принцип работы инфракрасного дальномера Sharp GP2Y0A02YK0F
Инфракрасный дальномер Sharp GP2Y0A02YK0F — это компактный датчик для измерения расстояния в диапазоне от 20 до 150 см. Он работает по принципу триангуляции с использованием инфракрасного излучения:
- Датчик испускает импульс ИК-излучения
- Луч отражается от препятствия и возвращается на приемник
- По углу приема отраженного луча определяется расстояние до объекта
Этот метод обеспечивает высокую точность измерений независимо от цвета и фактуры поверхности объекта. Дальномер выдает аналоговый сигнал напряжения, пропорциональный измеренному расстоянию.
Основные характеристики датчика Sharp GP2Y0A02YK0F
Ключевые параметры инфракрасного дальномера Sharp GP2Y0A02YK0F:

- Диапазон измерения: 20-150 см
- Напряжение питания: 4.5-5.5 В
- Потребляемый ток: около 33 мА
- Время отклика: 39 мс
- Размеры: 29.5 x 13 x 21.6 мм
- Вес: 3.5 г
Датчик имеет компактные размеры и малый вес, что позволяет легко интегрировать его в различные устройства. Низкое энергопотребление делает его подходящим для автономных и мобильных систем.
Применение ИК-дальномера в робототехнике и электронных проектах
Инфракрасный дальномер Sharp GP2Y0A02YK0F широко используется в следующих областях:
- Мобильная робототехника — для обнаружения препятствий и навигации
- Системы безопасности — для детектирования движения и присутствия объектов
- Автоматизация — для контроля положения и расстояния до объектов
- Интерактивные инсталляции — для взаимодействия с пользователем
- IoT-устройства — для сбора данных об окружающей среде
Благодаря простоте использования и надежности этот датчик часто применяется в любительских и образовательных проектах на базе Arduino и других микроконтроллеров.

Подключение и программирование ИК-дальномера с Arduino
Для работы с датчиком Sharp GP2Y0A02YK0F и Arduino необходимо:
- Подключить питание датчика к выводам 5V и GND Arduino
- Соединить сигнальный вывод датчика с аналоговым входом Arduino (например, A0)
- Загрузить скетч для считывания и обработки данных с датчика
Пример простого кода для Arduino:
const int sensorPin = A0; // Аналоговый вход для датчика void setup() { Serial.begin(9600); } void loop() { int sensorValue = analogRead(sensorPin); float distance = 27.86 * pow(sensorValue * 0.0048828125, -1.15); Serial.print("Расстояние: "); Serial.print(distance); Serial.println(" см"); delay(500); }
Этот код считывает аналоговое значение с датчика, преобразует его в расстояние в сантиметрах и выводит результат в Serial Monitor. Формула преобразования может потребовать калибровки для конкретного экземпляра датчика.
Преимущества и недостатки ИК-дальномера по сравнению с ультразвуковыми датчиками
Инфракрасный дальномер Sharp GP2Y0A02YK0F имеет ряд преимуществ и недостатков по сравнению с популярными ультразвуковыми датчиками расстояния:
Преимущества:
- Более высокая точность измерений на малых расстояниях
- Меньшее время отклика
- Нечувствительность к акустическим помехам
- Компактные размеры
Недостатки:
- Меньший диапазон измерения (до 150 см против 400+ см у ультразвуковых)
- Зависимость от отражающих свойств поверхности
- Более высокая стоимость
Выбор между ИК и ультразвуковым дальномером зависит от конкретных требований проекта. ИК-датчик лучше подходит для точных измерений на малых дистанциях, а ультразвуковой — для обнаружения препятствий на большем расстоянии.
Калибровка и повышение точности измерений ИК-дальномера
Для повышения точности измерений инфракрасного дальномера Sharp GP2Y0A02YK0F можно выполнить следующие шаги:
- Провести серию измерений на известных расстояниях
- Построить график зависимости выходного напряжения от расстояния
- Подобрать наиболее подходящую аппроксимирующую функцию
- Использовать полученную функцию в коде для преобразования напряжения в расстояние
Пример улучшенной функции преобразования для Arduino:

float getDistance(int sensorValue) { float voltage = sensorValue * (5.0 / 1023.0); return 60.374 * pow(voltage, -1.16); }
Регулярная калибровка позволяет компенсировать изменения характеристик датчика со временем и повысить точность измерений в различных условиях эксплуатации.
Альтернативные модели ИК-дальномеров для различных диапазонов измерения
Компания Sharp предлагает несколько моделей инфракрасных дальномеров для различных диапазонов измерения:
- GP2Y0A21YK0F: диапазон 10-80 см, подходит для малых расстояний
- GP2Y0A02YK0F: диапазон 20-150 см, универсальный вариант
- GP2Y0A710K0F: диапазон 100-550 см, для измерений на большом расстоянии
Выбор конкретной модели зависит от требуемого диапазона измерений в проекте. Все эти датчики имеют схожий принцип работы и могут использоваться с Arduino и другими микроконтроллерами.
Интеграция ИК-дальномера в проекты умного дома и IoT
Инфракрасный дальномер Sharp GP2Y0A02YK0F может быть эффективно использован в проектах умного дома и интернета вещей (IoT) для следующих задач:

- Автоматическое открывание дверей и ворот при приближении человека
- Контроль заполнения мусорных баков и контейнеров
- Измерение уровня жидкости в резервуарах
- Определение присутствия человека в помещении
- Системы безопасности и охраны периметра
Для интеграции датчика в IoT-систему можно использовать платформы типа Arduino IoT Cloud, Blynk или ThingSpeak. Это позволит удаленно мониторить данные с датчика и настраивать автоматические действия на основе измеренных расстояний.
Заключение: перспективы применения ИК-дальномеров в современной электронике
Инфракрасные дальномеры, такие как Sharp GP2Y0A02YK0F, играют важную роль в современной электронике и робототехнике благодаря своей точности, компактности и простоте использования. Основные тенденции и перспективы их применения включают:
- Интеграцию в системы компьютерного зрения и машинного обучения
- Использование в автономных дронах и роботах для навигации
- Применение в носимых устройствах для отслеживания движений
- Развитие многолучевых систем для 3D-сканирования объектов
С развитием технологий ИК-дальномеры становятся все более точными, энергоэффективными и доступными, что открывает новые возможности для их применения в различных областях электроники и робототехники.

3.2. Инфракрасный дальномер — Цель обнаружена
На протяжении тысячелетий люди усовершенствовали орудия труда, изучали силы природы и подчиняли их себе, использовали их энергию для работы машин, а в прошлом веке создали машины, которые могут управлять другими машинами. Теперь создание устройств, которые взаимодействуют с физическим миром, доступно даже школьнику.
Наш курс состоит из серии практических задач про создание вещей, которые работают сами: изучают мир, принимают решения и действуют – двигаются, обмениваются данными друг с другом и с человеком, управляют другими устройствами. Мы покажем, как собирать эти устройства и программировать их, используя в качестве основы платформу Arduino.
Пройдя этот курс, вы сможете создавать устройства, которые считывают данные о внешнем мире с разнообразных датчиков, обрабатывают информацию, получают и отправляют данные на ПК, в Интернет, на мобильные устройства, управляют индикацией и движением. Создание устройств будет включать проектирование, изучение компонентов, сборку схем, написание программ, диагностику.
Инфракрасный дальномер GP2Y0A02YK0F | 2 Схемы
Самым распространенным датчиком для измерения расстояния в диапазоне от десятков сантиметров до единиц метров для Arduino проектов является ультразвуковой локатор HC-SR04. Однако, этот вариант не является единственным. Альтернативой ультразвуковому локатору может служить инфракрасный дальномер SHARP GP2Y0A02YK0F. Данный локатор может измерять расстояние в диапазоне от 20 до 150 см. В частности примеры работы с подобными устройствами можно найти в классической книге [1] или в [2-3]. Данное устройство приобретено на aliexpress.ru всего за 4 доллара.
Однако, этот вариант не является единственным. Альтернативой ультразвуковому локатору может служить инфракрасный дальномер SHARP GP2Y0A02YK0F. Данный локатор может измерять расстояние в диапазоне от 20 до 150 см. В частности примеры работы с подобными устройствами можно найти в классической книге [1] или в [2-3]. Данное устройство приобретено на aliexpress.ru всего за 4 доллара.
Датчик поставляется в антистатическом пакете
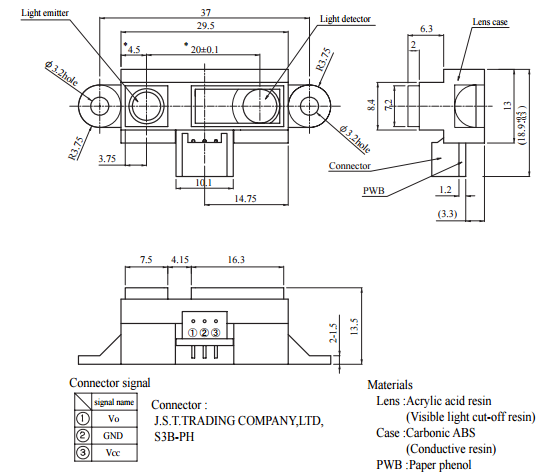
Датчик имеет пластмассовый корпус с габаритами 45 х 22 х 18 мм, масса 5 г без кабеля.
На корпусе имеются два крепежных отверстия, диаметром 3 мм с межцентровым расстоянием 37 мм.
Вместе с датчиком поставляют соединительный кабель длиной 190 мм.
- В кабеле красный провод – питание 5 В,
- черный – общий,
- желтый – сигнальный.
Ток, потребляемый устройством 33 мА [4-5], согласно измерениям автора обзора, ток потребления составил 26 мА.
Дальномер имеет нелинейную зависимость между измеренным расстоянием и напряжением на информационном выходе.
Как видно, напряжение питания и диапазон изменения напряжения на информационном выходе позволяют без проблем подключить данное устройство к Arduino. Для работы с этим дальномером энтузиастами уже написаны демонстрационные программы, например [4]. Данная программа рассчитывает расстояние до препятствия в сантиметрах и передает результаты расчета по последовательному порту.
В целом первое впечатление о данном датчике положительное, в рамках заявленного диапазона расстояний датчик работает, на яркие источники света (светодиодная лампа) аномальной реакции замечено не было. К недостаткам, по сравнению с ультразвуковым локатором HC-SR04, можно отнести более высокую стоимость и меньшую дальность. Так что если радиолюбителя по какой-то причине не устраивает ультразвуковой дальномер вроде HC-SR04, то датчик SHARP GP2Y0A02YK0F может стать альтернативой.
Литература и ссылки
- Блум Д. Изучаем Arduino: инструменты и методы технического волшебства: Пер. с англ. — СПб.: БХВ-Петербург, 2015. — 336 с.
- robocraft.ru/blog/electronics/748.html
- mysku.ru/blog/aliexpress/29357.html
- robocraft.ru/blog/electronics/783.html
- zelectro.cc/SHARP_GP2Y0A02YK0F
Прошивку и даташит на датчик скачайте в архиве. Специально для сайта 2Схемы — Denev.
Мини 30 м USB Перезаряжаемый инфракрасный дальномер карманная ручная ИК электронная линейка с подсветкой ЖК дисплей измерение по пифагору|Лазерные дальномеры|
Пункты маркированного списка:1. Высокая точность: Этот цифровой ИК-дальномер обеспечивает точные и быстрые результаты измерений, чтобы удовлетворить ваши требования к измерениям. Цифровой измерительный измерительные рулетки с 0,1 футов до 100 футов с точностью до 3 мм, что очень быстро, точной и эффективной.
2. Различные функции и режимы: портативная измерительная лента с уровнем поддерживает функцию непрерывного измерения, функцию измерения по пифагору, функцию измерения площади, функцию измерения объема, функцию сложения и вычитания, широко используется цифровой инструмент ранжирования.
 Подходит для дома, строительства, промышленности, больших площадей, таких как комнаты, квартиры, здания, недвижимость, фабрики, склады и т. д.
Подходит для дома, строительства, промышленности, больших площадей, таких как комнаты, квартиры, здания, недвижимость, фабрики, склады и т. д.3. ЖК-дисплей: ИК-измерительные инструменты широко используются в домашнем и инженерном оформлении, строительстве, недвижимости, садоводстве, городском проектировании, гидравлическом инженерном мониторинге и так далее. Большой ЖК-дисплей с подсветкой и многоуровневым дисплеем обеспечивает большую видимость в темных областях.
4. Экономьте деньги: 15 секунд без автоматического ИК-выключения, 45 секунд без автоматического выключения, наш ручной дальномер имеет перезаряжаемый литиевый аккумулятор 200 мАч с usb-кабелем, готов к зарядке
5. 100% гарантия соответствия: мы стремимся к тому, чтобы каждый уровень измерения электронной ленты был тщательно протестирован перед упаковкой. Если у Вас возникли какие-либо проблемы, пожалуйста, свяжитесь с нами, чтобы решить вашу проблему.
Параметры:
Точность измерения: ± 3 мм *
Единица измерения: m/in/ft
Диапазон измерения (без отражателя): D30: 0,03-30 м ** D35: 0,03-35 м **
Время измерения: 0,3-4 секунды
Тип ИК: 620 ~ 670нм,Автоматическое выключение ИК: 15 секунд
Автоматическое выключение: 45 секунд
Подсветка дисплея: Белый светодиодный
Переключение на параметры: √
Батарея дисплей: √
Тип батареи: D30: 200 мАч перезаряжаемая литиевая батарея
Вес нетто: около 20 г
Диапазон рабочих температур: 0 C ° ~ 40 C °
Диапазон температур хранения: -20 C ° ~ 60 C °
Размер продукта: около 62*21*15 мм/2,44*0,82 * 0.
 59in
59inРазмер упаковки: около 120*40*30 мм
Комплектация:
1 * измерительный инструмент
1 * ремешок на руку
1 * USB кабель для зарядки
| Позиция | Дополнительная информация | Кол-во | Ед. изм. |
|---|---|---|---|
| 1. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик линии цифровой | 15 | шт |
| 2. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик освещенности | 15 | шт |
| 3. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик паров спирта | 15 | шт |
4. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Датчик наклона | 15 | шт |
| 5. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик приближения и освещенности | 15 | шт |
| 6. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик природного газа | 15 | шт |
| 7. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик пульса | 15 | шт |
| 8. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик сжиженного углеводородного газа | 15 | шт |
9. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Датчик аналоговый термометр | 15 | шт |
| 10. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик температуры | 15 | шт |
| 11. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик температуры и влажности | 10 | шт |
| 12. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик тока | 13 | шт |
| 13. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик уровня воды (прямой) | 15 | шт |
14. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Датчик Холла | 15 | шт |
| 15. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик шума | 15 | шт |
| 16. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик ИК-приемник | 15 | шт |
| 17. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик инфракрасный дальномер 10-80 см | 15 | шт |
| 18. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик инфракрасный дальномер 20-150 см | 15 | шт |
19. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Датчик инфракрасный дальномер 4-30 см | 15 | шт |
| 20. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик аудиовход mini-jack | 15 | шт |
| 21. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик движения инфракрасный | 15 | шт |
| 22. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик клавиатура 4х3 кнопки | 15 | шт |
| 23. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик клавиатура 4х4 кнопки | 10 | шт |
24. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Датчик кнопка | 15 | шт |
| 25. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик магнетометр | 15 | шт |
| 26. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик потенциометр | 15 | шт |
| 27. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик резистор давления | 15 | шт |
| 28. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик резистор изгиба | 9 | шт |
29. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Датчик вибрации | 15 | шт |
| 30. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик оттенка цвета | 15 | шт |
| 31. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик барометр | 15 | шт |
| 32. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик сканер | 15 | шт |
| 33. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик термистор | 15 | шт |
34. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Датчик фоторезистор | 15 | шт |
| 35. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик ультразвуковой дальномер | 15 | шт |
| 36. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик ультразвуковой дальномер | 14 | шт |
| 37. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик температуры и влажности | 10 | шт |
| 38. Наборы конструкторские и игрушки для конструирования прочие | Набор компонентов Матрёшка | 13 | шт |
39. Наборы конструкторские и игрушки для конструирования прочие Наборы конструкторские и игрушки для конструирования прочие |
Набор компонентов Йодо | 13 | шт |
| 40. Наборы конструкторские и игрушки для конструирования прочие | Электронный конструктор Малина | 5 | шт |
| 41. Наборы конструкторские и игрушки для конструирования прочие | Образовательный набор для обучения прикладному программированию | 10 | шт |
| 42. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик гироскоп | 15 | шт |
| 43. Инструменты и приборы прочие для измерения, контроля и испытаний | Драйвер шагового двигателя | 13 | шт |
44. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Пьезодинамик | 13 | шт |
| 45. Инструменты и приборы прочие для измерения, контроля и испытаний | Повышающий стабилизатор напряжения | 5 | шт |
| 46. Инструменты и приборы прочие для измерения, контроля и испытаний | Часы реального времени | 11 | шт |
| 47. Инструменты и приборы прочие для измерения, контроля и испытаний | Модуль Bluetooth | 13 | шт |
| 48. Инструменты и приборы прочие для измерения, контроля и испытаний | Плата расширения | 5 | шт |
49. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
ИК-передатчик | 5 | шт |
| 50. Инструменты и приборы прочие для измерения, контроля и испытаний | Беспроводной приемник | 13 | шт |
| 51. Инструменты и приборы прочие для измерения, контроля и испытаний | Беспроводной передатчик | 13 | шт |
| 52. Инструменты и приборы прочие для измерения, контроля и испытаний | Модуль Wi-Fi | 13 | шт |
| 53. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик влажности почвы | 15 | шт |
54. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Понижающий DC-DC преобразователь | 5 | шт |
| 55. Инструменты и приборы прочие для измерения, контроля и испытаний | Плата расширения | 13 | шт |
| 56. Инструменты и приборы прочие для измерения, контроля и испытаний | Плата расширения | 5 | шт |
| 57. Инструменты и приборы прочие для измерения, контроля и испытаний | Плата расширения | 5 | шт |
| 58. Инструменты и приборы прочие для измерения, контроля и испытаний | Микросервопривод | 40 | шт |
59. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Сервопривод | 30 | шт |
| 60. Инструменты и приборы прочие для измерения, контроля и испытаний | Привод постоянного вращения | 30 | шт |
| 61. Наборы конструкторские и игрушки для конструирования прочие | Электронный конструктор Робот | 2 | шт |
| 62. Батареи и аккумуляторы | Зарядное устройство | 3 | шт |
| 63. Батареи и аккумуляторы | Аккумулятор 2500 мАч | 48 | шт |
64. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Датчик температуры герметичный | 15 | шт |
| 65. Инструменты и приборы прочие для измерения, контроля и испытаний | Плата макетная беспаечная | 20 | шт |
| 66. Инструменты и приборы прочие для измерения, контроля и испытаний | Патч-корд | 10 | шт |
| 67. Батареи и аккумуляторы | Импульсный блок питания | 7 | шт |
| 68. Инструменты и приборы прочие для измерения, контроля и испытаний | Патч-корд | 10 | шт |
69. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Плата | 18 | шт |
| 70. Инструменты и приборы прочие для измерения, контроля и испытаний | Плата | 18 | шт |
| 71. Инструменты и приборы прочие для измерения, контроля и испытаний | Плата | 18 | шт |
| 72. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик вибрации | 15 | шт |
| 73. Наборы конструкторские и игрушки для конструирования прочие | Образовательный набор для обучения прикладному программированию | 13 | шт |
74. Наборы конструкторские и игрушки для конструирования прочие Наборы конструкторские и игрушки для конструирования прочие |
Lego базовый набор | 13 | шт |
| 75. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик водорода | 15 | шт |
| 76. Наборы конструкторские и игрушки для конструирования прочие | Ресурсный набор Lego | 14 | шт |
| 77. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик горючих газов | 15 | шт |
| 78. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик акселерометр | 15 | шт |
79. Инструменты и приборы прочие для измерения, контроля и испытаний Инструменты и приборы прочие для измерения, контроля и испытаний |
Датчик кислотности жидкости | 15 | шт |
| 80. Инструменты и приборы прочие для измерения, контроля и испытаний | Датчик линии аналоговый | 15 | шт |
Лазерный дальномер ADA Shooter 400 А00331 — цена, отзывы, характеристики, фото
Лазерный дальномер ADA Shooter 400 А00331 с шестикратным увеличением служит для измерения расстояний до объектов от 6 до 400 метров и скорости их передвижения до 300 км/ч. В поле зрения окуляра располагаются визирные линии по типу оптического прицела для легкости наведения, индикаторы готовности, режима измерения и заряда батареи. В цифровом виде также отображаются результаты измерений. Управление дальномером осуществляется всего двумя кнопками — одна для включения/выключения, измерения, а вторая для переключения между режимами измерения расстояний и скорости. Для маскировки наблюдателя в приборе используется ИК-лазер — отсутствует лазерная точка-маркер, что весьма полезно для охотников.
Для маскировки наблюдателя в приборе используется ИК-лазер — отсутствует лазерная точка-маркер, что весьма полезно для охотников.
- Для охоты и туризма да
- Поверка нет
- Внесен в госреестр да
- Мах дальность измерения (без пластины), м 400
- Кол-во точек начала отсчета 1
- Встроенный прицел да
- Bluetooth нет
 org/PropertyValue»> Ударопрочный корпус нет
org/PropertyValue»> Ударопрочный корпус нет - Функция Пифагора нет
- Функция сложения/вычитания нет
- Вычисление углов нет
- Функция расчета объема нет
- Непрерывное измерение нет
- Вычисление площади нет
- Определение mах и min значений нет
- Встроенная память нет
- Резьба под штатив, дюйм нет
- Элементы питания CR2
- Количество и напряжение элементов питания 1х3B
- Упаковка коробка
- Габариты, мм 104х72х41
- Дальность измерения с/без отражателем, м -/6-400
- Длина волны, нм 905
- Погрешность, мм ±1000
- Рабочая температура, °С от -20 до +50
- Вес, кг 0,185
- Показать еще
Наша компания не проводит поверку измерительного инструмента. Но вы можете обратиться в специальную метрологическую службу, у которой есть лицензия на эту услугу.
Этот товар из подборок
Комплектация *
- Чехол;
- Ремешок;
- Салфетка;
- Инструкция;
- Картонная коробка.
Параметры упакованного товара
Единица товара: Штука
Вес, кг: 0,27
Длина, мм: 129
Ширина, мм: 87
Высота, мм: 69
Особенности дальномера ADA Shooter 400
| ||||||
Преимущества
|
Произведено
- Гонконг — родина бренда
- Китай — страна производства*
- Информация о производителе
Указанная информация не является публичной офертой
На данный момент для этого товара нет расходных материаловСервис от ВсеИнструменты.ру
Мы предлагаем уникальный сервис по обмену, возврату и ремонту товара!
Обратиться по обмену, возврату или сдать инструмент в ремонт вы можете в любом магазине или ПВЗ ВсеИнструменты.ру.
Гарантия производителя
Гарантия производителя 2 года (на бензотехнику — 1 год)Гарантийный ремонт
Здесь вы найдете адреса расположенных в вашем городе лицензированных сервисных центров.
| Лицензированные сервисные центры | Адрес | Контакты |
|---|---|---|
| СЦ «Гео Тотал» МСК Средний срок ремонта — 13 дней | ул. 1-й Дорожный пр-д, д. 6, стр. 2 | +7 (800) 100-41-76 |
Продукция
Образовательный робототехнический модуль включает в себя:Базовый робототехнический набор – 1шт, предназначенные для индивидуального и группового применения в рамках специализированных робототехнических соревнований, образовательном процессе и исследовательских задачах.
Состоит из пластиковых деталей и крепежных элементов, а так же специализированного инструмента для их сборки. В состав набора входит: 120 деталей, представляющих собой различные пластины и скобы из высококачественного пластика; корпусные элементы из прозрачного пластика 4шт; различные втулки в кол-ве 60шт для реализации фиксированных и подвижных соединений; фиксирующие скобы для кабелей и шлейфов в кол-ве 20шт; комплект втулок и заклепок в кол-ве 28шт. Крепежные элементы представляют собой: комплект винтов и шурупов различной длины в кол-ве 640шт; комплект гаек различного номинального размера в кол-ве 410шт.
Содержит следующие основные элементы:
— Сервопривод на базе двигателя постоянного тока и понижающего редуктора — 18шт. Привод представляет собой электромеханическую сборку двигателя постоянного тока, а так же редуктора. Сервопривод обладает сетевым интерфейсом для управления посредством цифровых пакетов и возвращения параметров обратной связи по шине TTL.
— ИК – датчик — 2шт., обладает аналоговым выходом для выдачи результатов измерений.
-ИК – дальномер — 1шт. ИК-дальномер предназначен для измерения расстояния и обладает аналоговым выходным сигналом.
— Двухосевой гироскоп – 1шт. Датчик обладает аналоговым выходом для возврата результата измерений.
— Пульт дистанционного управления – 1шт. Пульт представляет собой ИК-джойстик с программируемыми кнопками в кол-ве 10 шт, а так же кнопкой включения/выключения и переключения режимов. Питание пульта осуществляется от аккумуляторов типа АА. Конструкция пульта предусматривает возможность замены ИК-модуля передачи данных на модуль типа ZigBee или Bluetooth.
— ИК-передатчик — 1шт. Устройство предназначено для подключения к управляющему контроллеру и приема сигналов от пульта дистанционного управления.
— Управляющий контроллер – 1шт. Управляющий контроллер представляет собой блок управления конструктивно и электрически совместимый со всеми элементами базового набора. На корпусе контроллера установлены 6 кнопок, 6 индикационных светодиодов, а так же переключатель питания управляющего контроллера. Внутри корпуса контроллера расположен микрофон для детектирования внешних звуков, а так же датчик уровня бортового питания. Контроллер содержит: 6 портов для подключения внешних цифровых и аналоговых устройств, 5 портов для подключения устройств по шине TTL.
— Комплект модулей ZigBee — 1шт., для беспроводной передачи данных. Каждый комплект состоит из 3х устройств, позволяющих организовать передачу данных между элементами базового набора и персональным компьютером.
— Модуль USB для преобразования интерфейсов в кол-ве 1шт. Модуль обеспечивает преобразование интерфейсов TTL,RS-232,RS-485 в последовательный интерфейс персонального компьютера.
— Универсальный сенсорный модуль — 1шт. Устройство содержит: 3 ИК-сенсора, позволяющих измерять дальность до объекта или яркость поверхности; ИК-порт для установления беспроводного канала связи между устройствами управления; микрофон; динамик; датчик температуры. Управление устройством и считывание показание сенсорных устройств осуществляется по шине TTL.
— Универсальный модуль на базе CMOS камеры — 1шт. Устройство обладает последовательным коммуникационным интерфейсом для подключения к управляющему контроллеру.
— Аккумуляторная батарея (LiPo) – 1шт. Аккумуляторная батарея установлена в пластиковом корпусе, совместимым с корпусными элементами и деталями комплекта.
— Адаптер для зарядки аккумуляторной батареи от сети 220В. – 1шт.
— Комплект сетевых кабелей -1шт., для зарядки аккумуляторной батареи.
— USB интерфейсный кабель для программирования базового робототехнического набора – 1шт.
Ресурсный робототехнический набор -1 шт.
Ресурсный робототехнический набор состоит из пластиковых деталей и крепежных элементов, а так же специализированного инструмента для их сборки. Набор содержит: 81 детали, представляющих собой перфорированные пластины из высококачественного пластика; 30 элементов различных подвижных передач и шарниров; 53 детали, представляющих собой конструктивные элементы и переходные фланцы между различными компонентами набора; 102 детали, представляющие собой компоненты для сборки гусеничных траков; пассивная опора – 1шт; 10 зубчатых колес; 2 резиновых колес с дисками из высококачественного пластика; 14 шкивов и 6 круглых фланца. Крепежные элементы представляют собой: комплект винтов различной длины в кол-ве 135 шт; комплект специализированных крепежных элементов в кол-ве 230 шт, представляющих собой пластиковые втулки и заклепки. Крепежные элементы позволяют реализовывать как фиксированные соединения деталей и фланцев, так и подвижные вращающиеся соединения шарниров и различных передач.
Набор содержит следующие основные элементы:
— Сервопривод на базе двигателя постоянного тока и понижающего редуктора — 2шт. Привод представляет собой электромеханическую сборку двигателя постоянного тока, а так же редуктора. Сервопривод обладает сетевым интерфейсом для управления посредством цифровых пакетов и возвращения параметров обратной связи по шине TTL.
— ИК – датчик — 3шт. ИК-сенсор обладает аналоговым выходом для выдачи результатов измерений.
— Массив ИК-сенсоров — 1шт. Устройство представляет единый модуль с общим кол-во ИК сенсоров 7шт. В состав устройства входит динамик, воспроизводящий звуки различной нотной тональности. Устройство обладает сетевым интерфейсом для управления посредством цифровых пакетов и возвращения параметров обратной связи по шине TTL.
— Интерфейсный кабель USB – 1шт., для программирования управляющего контроллера.
— Комплект шлейфов – 1шт., для соединения основных элементов базового робототехнического набора.
— Отсек для установки источника питания типа АА – 6шт.
— Управляющий контроллер – 1шт. Управляющий контроллер представляет собой блок управления конструктивно и электрически совместимый со всеми элементами базового набора. На корпусе контроллера установлены 6 кнопок, 6 индикационных светодиодов, а так же переключатель питания управляющего контроллера. Внутри корпуса контроллера расположен микрофон для детектирования внешних звуков, а так же датчик уровня бортового питания. Контроллер содержит: 6 портов для подключения внешних цифровых и аналоговых устройств, 5 портов для подключения устройств по шине TTL.
Образовательный робототехнический модуль включает в себя:
Методические рекомендации для преподавателя – 1шт.
содержат материалы для подготовки к проведению занятий; теоретические аспекты по основам робототехники; рекомендации по сборке не менее 30 различных подвижных моделей, инструкции и рекомендации по программированию.
Методические рекомендации для ученика – 1шт.
содержат руководства по сборке не менее 30 различных моделей на базе базового набора, поясняющие теоретические материалы.
Оптический диск с лицензионным программным обеспечением (на русском языке) – 1шт.
для программирования управляющего контроллера базового робототехнического набора.
Оптический диск для преподавателя – 1шт.
содержит программное обеспечение для настройки, калибровки и управления универсальным модулем на базе CMOS камеры, инструкции, методические рекомендации, рабочие материалы в цифровом формате для удобства проведения учебного процесса. Методические рекомендации включают в себя инструкции по программированию базового робототехнического комплекта; примеры базовых программ и комментарии к ним; описание теоретических основ по проектированию роботов и робототехнических систем, а так же описание оборудования и принципов его применения, входящего в состав базового модуля. Методические рекомендации содержат инструкции по управлению подвижными моделями роботов с помощью беспроводного интерфейса, а так же описание процесса разработки систем управления с помощью среды разработки LabView. Описание содержит информацию, необходимую для создания программы управления в среде LabView, а так же описание процесса передачи управляющих команд роботу так и различной информации и показаний бортовых датчиков от робота на компьютер пользователя по беспроводному каналу. Методические рекомендации содержат инструкции по управлению подвижными моделями роботов с помощью мультимедийных устройств на базе ОС Android посредством канала связи на базе интерфейса Bluetooth.
Все содержимое образовательного робототехнического блока помещено в пластиковый бокс с крышкой, для обеспечения сохранности при перевозке и хранении оборудования.
Робототехнический модуль «Исследовательский уровень» —
Образовательный робототехнический модуль «Исследовательский уровень» способствует освоению навыков в области проектирования и моделирования объектов с целью их использования для исследования явлений и процессов, формированию логического мышления и выявления причинно-следственных связей, а так же формирование навыков инженерно-технического программирования.
Модуль способствует построению индивидуальной траектории в профессиональных предпочтениях, формированию представлений о современном уровне развития науки и практического применения научного знания в решениях исследовательских задач в области робототехники.Модуль предназначен для проведения занятий в классах углубленного изучения робототехники, а так же в рамках изучения информатики и досугового образования. Модуль программно, аппаратно и конструктивно совместим с модулями «Начальный уровень», «Базовый уровень» и «Профессиональный уровень» и обладать расширенным функционалом.
СОСТАВ МОДУЛЯ
- Базовый робототехнический набор – 1шт.; для применения в образовательном процессе и исследованиях.
- Ресурсный робототехнический набор – 1шт.; для применения в специализированных соревнованиях.
- Методические рекомендации для преподавателя — 1шт.
- Методические рекомендации для ученика — 1шт.
- Оптический диск с лицензионным ПО (на русском) — 1шт.; для программирования управляющего контроллера.
- Оптический диск с инструкциями и рабочими материалами — 1шт.
Модуль содержит программное обеспечение для настройки, калибровки и управления универсальным модулем на базе CMOS камеры, инструкции, методические рекомендации, рабочие материалы вцифровом формате для удобства проведения учебного процесса.Содержит инструкции по управлению подвижными моделями роботов с помощью мультимедийных устройств на базе ОС Androidпосредством канала связи на базе интерфейса Bluetooth.
Все содержимое образовательного робототехнического модуля помещено в пластиковый бокс с крышкой, для обеспечения сохранности при перевозке и хранении оборудования.
СОСТАВ БАЗОВОГО РОБОТОТЕХНИЧЕСКОГО НАБОРА
Набор состоит из пластиковых деталей и крепежных элементов, а так же специализированного инструмента для их сборки:
- 120 деталей, представляющих собой различные пластины и скобы из качественного пластика; корпусные элементы из прозрачного пластика 4шт; различные втулки в кол-ве 60шт для реализации фиксированных и подвижных соединений; фиксирующие скобы для кабелей и шлейфов в кол-ве 20шт; комплект втулок и заклепок в кол-ве 28шт.
- Крепежные элементы представляют собой: комплект винтов и шурупов различной длины в кол-ве 640шт; комплект гаек различного размера в кол-ве 410шт.
Набор содержит следующие основные элементы:
- Сервопривод на базе двигателя постоянного тока и понижающего редуктора — 18шт. Сервопри-водобладает сетевым интерфейсом для управления посредством цифровых пакетов и возвращенияпараметров обратной связи по шине TTL. —
- ИК – датчик — 2шт., обладает аналоговым выходом для выдачи результатов измерений.
- ИК – дальномер — 1шт. ИК-дальномер.
- Двухосевой гироскоп – 1шт. Датчик с аналоговым выходом для возврата результата измерений.
- Пульт дистанционного управления – 1шт. Пульт представляет собой ИК-джойстик с програм-мируемыми кнопками в кол-ве 10 шт. Питание пульта осуществляется от аккумуляторов типа АА. Конструкция пульта предусматривает возможность замены ИК-модуля передачи данных на модуль типа ZigBee или Bluetooth.
- ИК-передатчик — 1шт. Устройство предназначено для подключения к управляющему контроллеру иприема сигналов от пульта дистанционного управления.
- Управляющий контроллер – 1шт. Управляющий контроллер представляет собой блок управленияконструктивно и электрически совместимый со всеми элементами базового набора. Внутри корпусаконтроллера расположен микрофон, а так же датчик уровня бортового питания. Контроллер содержит: 6 портов для подключения внешних цифровых устройств, 5 портов для подключения устройств по TTL.
- Комплект модулей ZigBee — 1шт., для беспроводной передачи данных. Каждый комплект состоит из 3хустройств, позволяющих организовать передачу данных между элементами базового набора иперсональным компьютером.
- Модуль USB для преобразования интерфейсов в кол-ве 1шт. Модуль обеспечивает преобразованиеинтерфейсов TTL,RS-232,RS-485 в последовательный интерфейс персонального компьютера.
- Универсальный сенсорный модуль — 1шт. Устройство содержит: 3 ИК-сенсора, позволяющих измерятьдальность до объекта или яркость поверхности; ИК-порт; микрофон; динамик; датчик температуры.Управление устройством и считывание показание сенсорных устройств осуществляется по шине TTL.
- Универсальный модуль на базе CMOS камеры — 1шт. Устройство обладает последовательнымкоммуникационным интерфейсом для подключения к управляющему контроллеру.
- Аккумуляторная батарея (LiPo) – 1шт. Аккумуляторная батарея установлена в пластиковом корпусе,совместимым с корпусными элементами и деталями комплекта.
- Адаптер для зарядки аккумуляторной батареи от сети 220В. – 1шт.— Комплект сетевых кабелей -1шт., для зарядки аккумуляторной батареи.
- USB интерфейсный кабель для программирования базового набора – 1шт.
СОСТАВ РЕСУРСНОГО НАБОРА
Набор состоит из пластиковых деталей и крепежных элементов, а так же специализированного инструмента для их сборки:
- 81 детали, представляющих собой перфорированные пластины из прочного пластика;
- 30 элементов различных подвижных передач и шарниров;
- 53 детали, представляющих собой конструктивные элементы и переходные фланцы между различными компонентами набора;
- 102 детали, представляющие собой компоненты для сборки гусеничных траков;пассивная опора – 1шт; 10 зубчатых колес; 2 резиновых колес с дисками из качественного пластика; 14 шкивов и 6 круглых фланцев.Крепежные элементы представляют собой: комплект винтов различной длины в кол-ве 135 шт; комплект специализированных крепежных элементов в кол-ве 230 шт, представляющих собой пластиковые втулки и заклепки. Крепежные элементы позволяют реализовывать как фиксированные соединения деталей и фланцев, так и подвижные вращающиеся соединения шарниров и различных передач.
Набор содержит следующие основные элементы:
- Сервопривод на базе двигателя постоянного тока и понижающего редуктора — 2шт. Приводпредставляет собой электромеханическую сборку двигателя постоянного тока, а так же редуктора. Сервопривод обладает сетевым интерфейсом для управления посредством цифровых пакетов ивозвращения параметров обратной связи по шине TTL.
- ИК – датчик — 3шт. ИК-сенсор обладает аналоговым выходом для выдачи результатов измерений.
- Массив ИК-сенсоров — 1шт. Устройство представляет единый модуль с общим кол-во ИК сенсоров 7шт.
В состав устройства входит динамик, воспроизводящий звуки различной нотной тональности.Устройство обладает сетевым интерфейсом для управления посредством цифровых пакетов ивозвращения параметров обратной связи по шине TTL.
- Интерфейсный кабель USB – 1шт., для программирования управляющего контроллера. — Комплект шлейфов – 1шт., для соединения основных элементов базового робото-технического набора.
- Отсек для установки источника питания типа АА – 6шт.
- Управляющий контроллер – 1шт. Управляющий контроллер представляет собой блок управленияконструктивно и электрически совместимый со всеми элементами базового набора. микрофон длядетектирования внешних звуков, а так же датчик уровня бортового питания. Контроллер содержит: 6портов для подключения внешних цифровых и аналоговых устройств, 5 портов для подключенияустройств по шине TTL.
Все элементы каждого базового робототехнического набора, входящего в комплект поставки конструктивно и электрически совместимы друг с другом.
ПРЕИМУЩЕСТВА МОДУЛЯ
- Возможность проведения лабораторных работ по разработке 34 робототехнических систем.
- Наличие учебных материалов по программированию роботов в базовой среде программирования.
- Возможность проектирования систем управления на базе сетей из устройств управления, приводов, и т.д.
- Расширяемость базового робототехнического набора. Возможность комбинирования комплектующих базовых робототехнических наборов и подключения дополнительных приводов и сенсорных устройств.
- Наличие уникальной возможности разработки человекоподобного робота.
- Наличие модуля камеры чтобы находить объекты, распознавать их и манипулировать ими.
Pololu — Датчики резкого расстояния
| Разнообразные датчики расстояния Sharp. Слева направо: GP2Y0A02, GP2Y0A21 или GP2Y0A41, GP2Y0A51 и GP2Y0D8xx. |
|---|
| Тип выхода | Датчик | Дальность обнаружения | Типичный Выборка Частота |
Рабочее Напряжение Диапазон |
Среднее значение Предложение Текущее |
Размер |
|---|---|---|---|---|---|---|
| аналоговое напряжение (обеспечивает измерение расстояния ) |
GP2Y0A60, 5 В | 10 см — 150 см | 60 Гц | 2.7 В — 5,5 В | 33 мА | 1,30 ″ × 0,41 ″ × 0,40 ″ * |
| GP2Y0A60, 3 В | 10 см — 150 см | 60 Гц | 2,7 В — 3,6 В | 33 мА | 1,30 ″ × 0,41 ″ × 0,40 ″ * | |
| GP2Y0A02 | 20 см — 150 см | 26 Гц | 4,5 В — 5,5 В | 33 мА | 1,75 ″ × 0,75 ″ × 0,85 ″ | |
| GP2Y0A21 | 10 см — 80 см | 26 Гц | 4.5 В — 5,5 В | 33 мА | 1,75 ″ × 0,75 ″ × 0,53 ″ | |
| GP2Y0A41 | 4 см — 30 см | 60 Гц | 4,5 В — 5,5 В | 12 мА | 1,75 ″ × 0,75 ″ × 0,53 ″ | |
| GP2Y0A51 | 2 см — 15 см | 60 Гц | 4,5 В — 5,5 В | 12 мА | 1,06 ″ × 0,52 ″ × 0,56 ″ | |
| цифровой (не обеспечивает измерение расстояния ) |
GP2Y0D815 | 0.5 см — 15 см | 390 Гц | 2,7 В — 6,2 В | 5 мА | 0,85 ″ × 0,35 ″ × 0,41 ″ * |
| GP2Y0D810 | 2 см — 10 см | 390 Гц | 2,7 В — 6,2 В | 5 мА | 0,85 ″ × 0,35 ″ × 0,41 ″ * | |
| GP2Y0D805 | 0,5 см — 5 см | 390 Гц | 2,7 В — 6,2 В | 5 мА | 0,85 ″ × 0.35 ″ × 0,41 ″ * |
* Размеры включают несущую плату Pololu.
Сравнить все товары в этой категории
Товаров в категории «Датчики резкого расстояния»
Датчик расстояния GP2Y0A60SZ от Sharp предлагает широкий диапазон обнаружения от 4 ″ до 60 ″ (от 10 см до 150 см) и высокую частоту обновления 60 Гц. Расстояние указывается аналоговым напряжением, поэтому для взаимодействия с модулем требуется только один аналоговый вход. Датчик поставляется установленным на нашей компактной несущей плате, что позволяет легко интегрировать этот отличный датчик в ваш проект, и настроен для , режим 5V .
Датчик расстояния GP2Y0A60SZ от Sharp предлагает широкий диапазон обнаружения от 4 ″ до 60 ″ (от 10 см до 150 см) и высокую частоту обновления 60 Гц. Расстояние указывается аналоговым напряжением, поэтому для взаимодействия с модулем требуется только один аналоговый вход. Датчик поставляется установленным на нашей компактной несущей плате, что позволяет легко интегрировать этот отличный датчик в ваш проект, и настроен для режима 3V .
Эта компактная несущая плата позволяет легко интегрировать аналоговый датчик расстояния Sharp GP2Y0A60SZLF (не входит в комплект) в ваш проект, предоставляя все необходимые внешние компоненты и 0.Шаг 1 ″, четырехконтактный интерфейс для датчика. Эта версия несущей платы настроена для режима 5V .
Эта компактная несущая плата позволяет легко интегрировать аналоговый датчик расстояния Sharp GP2Y0A60SZLF (не входит в комплект) в ваш проект, предоставляя все необходимые внешние компоненты и четырехконтактный интерфейс с шагом 0,1 дюйма для датчика. Эта версия несущей платы настроена для режима 3V .
Датчик расстояния GP2Y0A60SZ от Sharp предлагает широкий диапазон обнаружения от 4 ″ до 60 ″ (от 10 см до 150 см) и высокую частоту обновления 60 Гц. Для этого датчика требуются дополнительные компоненты , которые можно найти на нашем носителе для датчиков Sharp GP2Y0A60SZLF.
GP2Y0A02 — это оптический датчик дальнего действия с наибольшим радиусом действия, который мы носим, с диапазоном обнаружения от 8 ″ до 60 ″ (от 20 см до 150 см). Высокая максимальная дальность обнаружения делает этот датчик жизнеспособной альтернативой гидролокатору в некоторых приложениях. Расстояние указывается аналоговым напряжением, что делает этот датчик очень простым в использовании.
Датчик расстояния GP2Y0A21 Sharp — отличный способ добавить предотвращение препятствий или обнаружение движения вашему роботу или любому другому проекту.Благодаря диапазону обнаружения от 4 до 32 дюймов (от 10 до 80 см) и аналоговому напряжению, указывающему расстояние, этот датчик очень прост в использовании.
Аналоговый датчик расстояния GP2Y0A41SK0F Sharp имеет диапазон обнаружения от 1,5 ″ до 12 ″ (от 4 см до 30 см). Более короткий диапазон обеспечивает более высокое разрешение измерений, а меньшее минимальное расстояние обнаружения делает этот датчик отличным средством обнаружения очень близких объектов. Расстояние указывается аналоговым напряжением, что делает этот датчик очень простым в использовании.
GP2Y0A51SK0F — это аналоговый датчик расстояния Sharp с самым коротким радиусом действия, который у нас есть, с диапазоном обнаружения от 0,8 ″ до 6 ″ (от 2 см до 15 см). Более короткий диапазон обеспечивает более высокое разрешение измерений, а низкое минимальное расстояние обнаружения делает этот датчик отличным решением для обнаружения очень близких объектов. Расстояние указывается аналоговым напряжением, что делает этот датчик очень простым в использовании.
Этот небольшой цифровой датчик расстояния обнаруживает объекты размером от 2 см до 10 см (0.8 ″ и 4 ″) прочь. Благодаря быстрому времени отклика, небольшому размеру и низкому потреблению тока этот датчик является хорошим выбором для бесконтактного обнаружения объектов, а наша компактная несущая печатная плата позволяет легко интегрировать его в ваш проект.
Этот небольшой цифровой датчик расстояния обнаруживает объекты на расстоянии от 0,5 см до 5 см, на расстоянии от (0,2 ″ до 2 ″). Благодаря быстрому времени отклика, небольшому размеру, низкому потреблению тока и короткому минимальному расстоянию срабатывания этот датчик является хорошим выбором для бесконтактного обнаружения объектов в непосредственной близости, а наша компактная несущая печатная плата позволяет легко интегрировать его в ваш проект.
Этот небольшой цифровой датчик расстояния обнаруживает объекты на расстоянии от 2 см до 10 см, на расстоянии (0,8–4 дюйма). Благодаря быстрому времени отклика, небольшому размеру и низкому потреблению тока этот датчик является хорошим выбором для бесконтактного обнаружения объектов.
Этот небольшой цифровой датчик расстояния обнаруживает объекты на расстоянии от 0,5 см до 5 см, на расстоянии от (0,2 ″ до 2 ″). Благодаря быстрому времени отклика, небольшому размеру, низкому потреблению тока и короткому минимальному расстоянию срабатывания этот датчик является хорошим выбором для бесконтактного обнаружения объектов, а его короткое минимальное расстояние обнаружения позволяет ему видеть объекты очень близко к лицевой стороне датчика. .
Эта крошечная несущая плата позволяет легко интегрировать цифровой датчик расстояния Sharp GP2Y0D815Z0F, GP2Y0D810Z0F или GP2Y0D805Z0F в ваш проект, предоставляя все необходимые внешние компоненты, светодиод для обратной связи о состоянии выхода и шаг 0,1 дюйма, три -штырьковый интерфейс к датчику.
Как собрать робота Учебные пособия
ДАТЧИКИ — ОСТРЫЙ ИК-ДИАПАЗОН
Инфракрасный дальномер Sharp , вероятно, самый мощный датчик на рынке. обычному роботу-любителю.Он чрезвычайно эффективен, прост в использовании, очень доступный (10-20 долларов), очень маленький, хороший диапазон (дюймы в метры) и низкое энергопотребление.
Как это работает
ИК-дальномер Sharp работает на основе процесса триангуляции .
Импульс света (диапазон длин волн 850 нм +/- 70 нм)
испускается, а затем отражается обратно (или не отражается вообще).
Когда свет возвращается, он возвращается под углом, который зависит от
расстояние до отражающего объекта. Триангуляция работает путем обнаружения
этот угол отраженного луча — зная угол, расстояние может
тогда определитесь.
Приемник ИК-дальномера оснащен специальной прецизионной линзой, которая передает
отраженный свет на замкнутую линейную ПЗС-матрицу на основе триангуляции
угол. Затем ПЗС-матрица определяет угол и заставляет дальномер
чтобы затем дать соответствующее аналоговое значение * для
быть прочитанным вашим микроконтроллером .
В дополнение к этому, в схеме инфракрасного дальномера Sharp применяется модулированный
частота излучаемого ИК-луча. Этот метод ранжирования практически невосприимчив к
помех от окружающего света, и предлагает удивительное безразличие к цвету
обнаруживаемого объекта.Другими словами, датчик способен обнаруживать
черная стена при полном солнечном свете с почти нулевым шумом.
(ОБНОВЛЕНИЕ: несмотря на распространенное мнение, прямые и непрямые солнечные лучи могут существенно повлиять на результаты. Я усвоил это на собственном горьком опыте!)
Ширина балки
Основная проблема / преимущество дальномера Sharp IR — это ширина луча.
В отличие от гидролокатора, он довольно тонкий —
Это означает, что для обнаружения объекта ваш датчик должен в основном указывать прямо на этот объект.Остерегайтесь ножек стула! хе-хе. . .
Так насколько же тонок излучаемый ИК-луч? Ну, достаю мой верный ИК-детектор, он примерно такой большой:
Детектор изменяет инфракрасный свет на оранжевый. Хорошо, это изображение частично подделано, потому что моя цифровая камера по какой-то причине не могла видеть оранжевый свет, поэтому я нарисовал его заново, чтобы вы могли его увидеть. Ширина луча такого же диаметра как линза слева от дальномера Sharp IR. Поскольку ИК-детектор был удален, луч тускнеет, а диаметр увеличивается.
Нелинейный выход
Sharp IR имеет нелинейный выход. Это означает, что по мере линейного увеличения расстояния
(с заданными приращениями) аналоговый выход увеличивается / уменьшается нелинейно. Изображение выше — это
типичный ожидаемый результат от вашего дальномера. Обратите внимание на странный излом в начале
графа. Это связано с тем, что дальномер не может обнаруживать очень короткие
расстояния. Обратитесь к конкретному дальномеру, который вы используете, чтобы определить диапазон
что ваш дальномер способен.
Для эффективного использования инфракрасного дальномера Sharp у вас должен быть выход напряжения. в зависимости от диаграммы расстояний до ссылки. В руководствах теперь есть график «типичной кривой отклика». для использования, но вы должны проверить, чтобы убедиться, что он точен. Если у вас нет диаграммы или вы хотите чтобы проверить диаграмму, запустите эксперимент, который измеряет расстояние в зависимости от выходного аналогового значения. Для этого поместите объект перед датчиком, измерьте расстояние, затем посмотрите на чтение вывода printf.Постройте график ваших данных. Рекомендую прочитать мою статью на расширенная интерпретация датчика в помощь вы лучше понимаете данные. Обычно люди либо создают таблицу поиска, либо создать репрезентативное уравнение функции расстояния.
Чтобы свести к минимуму шум, проведите этот эксперимент в среду, в которой вы хотите, чтобы ваш робот работал. Например, если вы хотите, чтобы ваш робот чтобы работать в заводском цехе, запустите этот эксперимент в заводском цехе — это будет убедитесь, что все условия окружающей среды одинаковы для максимальной точности.Это должно быть хорошее практическое правило для калибровки любого датчика.
Недостатки / проблемы
Одна из основных проблем с дальномером Sharp IR: идет ниже
минимальный диапазон датчика . Это когда объект находится так близко, что датчик не может добраться до него.
точные показания, и они говорят вашему роботу, что действительно близкий объект действительно далеко.
Это плохо, так как ваш робот затем начинает набирать скорость из-за неприятного столкновения.
У сонара также есть проблема с минимальной дальностью.Решение этой проблемы — НЕ ставить датчик заподлицо с передней частью робота.
но вместо этого вернуть датчик в робота так, чтобы передняя часть робота находилась
перед минимальным диапазоном датчика (см. изображение).
Это изображение ниже является хорошим примером этой концепции в САПР. Проверить это сообщение на форуме для получения дополнительной информации.
Другой проблемой является узость ИК-луча. В прочтении острых деталей и получении высокая точность, идеален тонкий луч.Но проблема с тонким лучом в том, что если он направлен не точно на объект, поэтому объект невидим. В робототехнике распространена шутка о том, что стул — главный соперник. маленького робота. Почему? Потому что ножки стульев действительно тонкие, и датчик их легко не заметить.
В отличие от ИК-дальномера будет гидролокатор. У сонара действительно низкая точность, но, поскольку он имеет широкий луч, он может легко обнаружить ножки стула. К сожалению, вы не можете определить размер или форму объекта с помощью дешевого гидролокатора для хобби.Сонар также имеет луч конической формы (расходящийся от исходной точки), а датчик Sharp Луч ИК-дальномера больше футбольный мяч формы (самая широкая часть в средняя ширина около 16 см).
Общая проблема этих дальномеров и гидролокатора — перекрестная помеха . Это означает, что сигнал, излучаемый одним датчиком, потенциально может быть прочитан другим. датчик и, следовательно, дают плохие показания. Однако, в отличие от гидролокатора, у которого есть звук сигналы, которые могут отражаться от нескольких стен, вам просто нужно убедиться, что ваш ИК-лучи не пересекаются параллельно (широкие части луча в форме футбольного мяча не перекрываются).Это имеет смысл, потому что у вас есть избыточные датчики, если два луча пересекаются.
Методы работы с ИК-дальномером Sharp
Переключатель бампера
Sharp IR можно использовать как быстрый и простой передний бесконтактный бампер для робота на вашем роботе.
Просто поместите два ИК-устройства перед роботом и перекрестите лучи, как показано. В идеале ты
предпочтительнее использовать рейнджеров с более широкими лучами. Примечание. С этой задачей справится и одиночный гидролокатор.
Примеры моих роботов с Sharp IR
|
Нечеткое
3 сервосканирующих ИК-дальномера Sharp 3 гидролокатора в качестве амортизатора столкновения скорость всенаправленного колеса 1 фут в секунду |
|
Гипер Белка
Моя первая попытка использовать дальномеры Sharp IR Сверхбыстрое реактивное 2D-отображение |
Обнаружение края Обнаружение объекта слежение
Использование острого ИК-излучения с обнаружением краев позволяет вашему роботу активно отслеживать
движущиеся объекты.Для получения дополнительной информации, исходного кода и примера ознакомьтесь с моими
сумо робот.
В этом видео ниже показано, как я устанавливаю Sharp IR на сервопривод:
Базовое двухмерное картирование дальномера
Еще один вариант использования дальномера Sharp IR Range Finder — это картографирование. Для этого вам понадобится
хотя бы один дальномер и хотя бы один немодифицированный сервопривод .
Общая теория заключается в том, что вы помещаете дальномер на движущийся сервопривод.Затем поверните сервопривод
в какой-то степени возьмите дистанционное чтение и запишите его. Затем перейдите к следующему углу, сделайте еще одно показание,
а затем запишите это. Продолжайте делать это, пока у вас не будет массива , расстояний до объектов и
соответствующие углы. После первого цикла обратите внимание, что теперь ваш сервопривод должен повернуть назад другой
направлении, поэтому вы должны сохранять значения в массиве в обратном порядке.
Поначалу этот метод массива может быть несколько сложным по нескольким причинам. Нужно понимать, как хранить и манипулировать значениями в массиве на вашем микроконтроллере.Если вы не знаете, как это сделать, найдите «массивы» на предпочитаемом языке программирования, чтобы понять его, затем найдите правила синтаксиса в своем руководство микроконтроллера для его программирования.
Теперь, когда вы знаете, как это сделать, теперь следующий шаг — осмысление всех этих данных. Первый вам нужно понять несколько вещей. Этот массив содержит числа, которые соответствуют расстояниям, которые соответствуют соседним углам.
Например, коробка перед вашим роботом может выглядеть так:
0 0 0 0 0 106 120 124 121 109 0 0 0 0 0
Цифры 0 означают, что луч уходит в бесконечность, а числа обозначают некоторое расстояние.Вы уже должны знать угол между каждым показанием (потому что вы запрограммировали сервопривод под этим углом, да). У вас также должна быть справочная таблица или уравнение, чтобы знать какому расстоянию соответствует каждое из чисел. Итак, занимаясь простой школьной геометрией, потому что вы знаете расстояние и углы, вы можете математически определить ширину этого поля. Аккуратно, а? Вы также можете легко определите, на какой угол повернуть вашего робота, чтобы избежать этого ящика — это то же самое угол, под которым находится 0 после показания 109 (или 0 перед 106).
А что, если вы получите такое чтение:
108 120 206 12 0 0 0 0 0 57 103 120 111 9 0
Если бы вы обратили внимание, вы бы знали, что это чтение показывает, что существует не один, а два объекта. перед вашим роботом. Один слева и один справа. Так что здесь все становится сложнее. Видите пространство между двумя объектами? Достаточно ли велик ваш робот, чтобы пройти? Возможно, вам просто нужно немного повернуть вашего робота, чтобы он указывал на центральный ноль, чтобы пройти через него.Или, если нет, увидеть этот 0 справа? Возможно, вашему роботу следует развернуться и просканировать там, чтобы найти лучший выход или способ обойти.
И еще один пример, теперь, когда вы это понимаете:
20 33 57 74 8810311211244 157 168 176
Не вижу нулей, а? Это показание показывает, что перед вашим роботом есть стена. Обратите внимание, как кажется, что числа увеличиваются при движении вправо? Это означает, что ваш робот обращен к стене под углом.Эта информация полезна, если вы хотите своего робота. сделать стену после , так как вы всегда знаете, под каким углом вы находитесь к стене. Если здесь были нули в вашем чтении, это может означать, что ваш робот смотрит в коридор, или, возможно, в дверной проем. Расчет угла к стене легко даст вам Информация.
Это тест 3D-сканирования и картографии для моей ERP. Это в основном отображение препятствий, а затем выбор наиболее свободного пути. Он сканирует всего по 30 точкам, поэтому разрешение у него довольно низкое.Это только первый шаг к более продвинутому алгоритму в будущем.
Методы измерения времени с базовым 2D-отображением
Есть несколько временных проблем , на которые вы должны обратить внимание при выполнении 2D-сопоставления.
Имейте в виду, что сервопривод требует времени, чтобы повернуться на определенный угол, имейте в виду, что есть небольшой
временная задержка между моментом, когда ваш датчик снимает показания, а затем отправляет это показание в
ваш микроконтроллер, и имейте в виду, что ваш робот, вероятно, движется, принимая эти
чтения.Если не учитывать эти факторы, ваш робот, несомненно, примет
ошибка и, возможно, сбой. Убедитесь, что вы проверили спецификации вашего сервопривода и датчика, чтобы знать
эта задержка. Распространенный способ обойти эту задержку — попросить вашего робота прекратить движение, пока
сканирование. Но остановка и запуск робота хромает, вы можете сделать лучше. Ты бы выглядел круто, если бы ты
не мог ходить с открытыми глазами? Точно.
Если вы создали робота, который может отображать 2D, вы, вероятно, уже поняли, что сервопривод вращается довольно медленно (условно говоря).И если у тебя сумасшедший пост робот (например, мой робот Hyper Squirrel) вам нужно делать карты достаточно быстро, чтобы не отставать от этих скоростей. Решение? Несколько дальномеров! Да, два дальномера на одном сервоприводе, каждый вращается на под углом друг к другу, ваш робот может отображать карту в два раза быстрее! Это потому, что ваш сервопривод теперь должен повернуть только половину расстояния. Обратите внимание, что сохранение значений расстояния в ваш массив становится немного сложнее, но не намного.
Реверс сервопривода , когда сервопривод возвращается в исходное положение, должен нельзя сбрасывать со счетов.Ваш робот должен записывать значения данных, когда ваш сервопривод поворачивается от 0 до 180 градусов, и он должен записывать значения данных в обратном порядке, когда он идет от 180 до 0 градусов. Этот эффективно удваивает скорость картографирования. Это также отличный способ проверить ошибок синхронизации . Если вы не учли время должным образом, вы заметите небольшое смещение в объекты перед вашим роботом, когда ваш сервопривод переключает направление вращения — даже когда ваш робот неподвижен ( см. изображение выше)! Вероятно, это означает, что вы не допустили паузы несколько миллисекунд, когда вы сказали сервоприводу перейти в новое положение, а затем еще одна пауза через несколько миллисекунд до того, как вы получите показания с помощью ИК-дальномера Sharp.Опять же, точное время паузы зависит от конкретного сервопривода и дальномера, который вы используете.
Резкий ИК-шум
Четкий ИК-датчик на самом деле очень шумный датчик. Когда у меня появляется больше времени, я пишу об этом здесь.
А пока ознакомьтесь с этим сообщением на форуме
и лучшее на сегодняшний день решение для этого.
Расширенное двухмерное картографирование
Хотите, чтобы ваш робот запомнил созданные карты и смог вернуться в записанные места? Какие
вам нужно сделать это довольно сложно и на самом деле является активной областью
исследования в области робототехники сегодня.Самый эффективный и популярный метод называется
SLAM, или
Одновременная локализация и отображение . Для новичков есть
алгоритм волнового фронта.
Щелкните это изображение, чтобы увидеть, как выглядит картирование роботов:
По сути, пусть ваш робот записывает 2D-массив (для позиций X и Y) позиций, когда он перемещается на фиксированные расстояния. Затем, используя данные датчика и геометрию, попросите его вычислить расположение стен и записать эти стены в ваш массив.Но тогда у вас будут проблемы с ошибками и дрейфом, и вы должны сравнить с предыдущими показаниями, чтобы проверить на точность. Поправка на этот дрейф — еще одна огромная область современного исследования в области робототехники. Ой так сложно. Удачи!
Вы также можете разместить маяков в своем мире и использовать другие датчики. Это самый распространенный метод с более дешевыми более простыми роботами. Но это требует большой ранней настройки и запрограммированных знаний. в вашего робота.
Это пример видео сопоставления, выполненного на моем модифицированном iRobot Create. который использует дальномер Sharp IR:
Лазерные дальномеры
Если вы любитель, у вас никогда не будет достаточно денег, чтобы позволить себе лазерный дальномер.Он работает в аналогичном
способ к Sharp IR, за исключением того, что он намного быстрее и извлекает значительно больше данных. Ниже видео
лазерного дальномера, используемого для транспортного средства-робота, которое следует за поездкой для первого DARPA Grand Challenge.
Если присмотреться, можно даже разглядеть ровную дорогу в центре, в то время как грубая грязь сбоку выделяется.
* Существуют также двоичные цифровые дальномеры , которые имеют одно фиксированное расстояние при котором они посылают сигнал.Если все, что вам нужно, это переключатель включения / выключения, вам не нужен диапазон данные. Цифровой сигнал легче обрабатывать вашей электроникой, поэтому цифровой дальномер был бы лучшим вариантом. Другие цифровые дальномеры по-прежнему возвращают данные о дальности, но только тогда, когда вы им сообщаете. через сигнальную линию. Аналоговые дальномеры непрерывно собирают данные о дальности независимо от того, хочет этого ваш робот или нет, тратить время автономной работы.
Дополнительная литература
Sharp IR — загадочный датчик, если вдаваться в подробности.Сообщество SoR расследует
способы настройки, улучшения и лучшего понимания датчика. Вот различные ссылки на форумы, которые могут вас заинтересовать:
Теория: солнечный свет влияет на Sharp IR только тогда, когда датчик движется
графики ошибок отображения времени
15-494 Весна 2009 г. Заключительный проект: ИК-дальномер
15-494 Окончательный проект, весна 2009 г.: ИК-дальномерДжин Су Ким и Чарльз Руланд
Введение и цели
Роботы Chiara оснащены датчиком Dynamixel AX-S1. Модуль, который устанавливается на головку прямо под камера.Модуль обеспечивает ориентацию влево, вправо и вперед. инфракрасные дальномеры. Целью нашего проекта было исследовать свойства этих дальномеров и реализовать поведение роботов для демонстрации тех характеристики. В частности, мы разработали метод определения расстояние до стен и их ориентация в поле зрения робота, и использовал эти данные для создания препятствия на пути к стенам. поведение.
Подход
Предварительное расследование
Дальномеры работают очень просто: они просто испустить луч инфракрасного света и измерить количество, которое возвращается.Таким образом, каждый дальномер выводит одно значение, которое Теккоцу нормализуется до значения с плавающей запятой от нуля до один включительно. Нулевое значение датчика указывает на отсутствие отражения; а значение датчика, равное единице, не очень полезно, так как это означает, что много падающего света для точного считывания. Чтобы дальномеры были полезны, нам нужно было установить соответствие между свойствами объекта измеренные и значения, возвращаемые измерением датчик.К сожалению, вскоре мы узнали, что это не так просто, как наведение сенсора на объекты на разном расстоянии и запись значение датчика вернулось. Несколько факторов могут повлиять на значение датчика:
- Состав объекта: Цвет, текстура и материал объектов может повлиять на количество инфракрасного света. отраженный или поглощенный. Например, можно было бы ожидать темная шероховатая поверхность, которая сильно впитывает и / или рассеивает больше света и дает более низкое значение датчика, чем светлая, гладкая поверхность.
- Расстояние до объекта: Интуитивно понятно, что чем дальше объект, тем меньшее количество света будет возвращать к датчику, из-за рассеяния света от объекта, поглощается или распространяется и никогда не достигает объекта.
- Ориентация объекта: Если поверхность объекта не примерно перпендикулярно пути света испускаемый датчиком, большая часть света будет отражаться от объект в другом направлении, чем датчик, и наблюдаемое значение датчика будет небольшим.
Выбор материала стены
Как упоминалось в Первоначальном исследовании, состав объекта влияет на работу ИК-датчика. Материалы, которые мы тестировали как стена включает:
- Стандартная белая бумага 8½ «× 11»
- Белая доска для плакатов
- Черная доска для плакатов
- Картон
- Гипсокартон, окрашенный в белый цвет (из лаборатории)
Установление эталона расстояния
Теперь, когда мы определили материал объекта для обнаружения с дальномером осталась проблема нахождения расстояние до стены и угол наклона стены, используя всего одну значение датчика.Наше решение состояло в том, чтобы записывать значения датчиков для объект на разном расстоянии от дальномера, но имеющий фиксированный угол относительно него.
Лента, обозначенная каждые 2 см, кладется прямо от центр переднего ИК-датчика Кьяры. Мы разместили белый плакат доска на разных расстояниях (4 см — 72 см) ориентирована перпендикулярно на ленте, и записали значение датчика на каждом расстоянии. Мы повторил этот процесс несколько раз и усреднил результаты.
Затем мы импортировали данные в Matlab, чтобы выяснить функцию значения, возвращаемые показаниями ИК-датчика, и расстояния от датчик к цели. Используя инструмент аппроксимации кривой в Matlab, мы в итоге получилось примерно соотношение обратных квадратов (показано ниже).
Функция, обратная показанной выше, обеспечивает то, что мы были ищу: учитывая значение датчика v , вернуть расстояние d до наблюдаемого объекта (при условии объект расположен перпендикулярно инфракрасному лучу).Это обратное задается формулой:
Где a = 34,26, b = -1,616, и c = -0,03016.
Определение расстояния до стены и угла
С функцией вычисления расстояния до перпендикулярного объекта
учитывая значение инфракрасного датчика, мы могли бы использовать тригонометрию и
поведение робота для вычисления расстояния до объекта в любом
угол. Во-первых, мы добавили код в Lookout .
класс в Tekkotsu, который сканирует произвольную линию и возвращает
серия точек данных, собранных во время сканирования.Каждые данные
точка содержит углы поворота и наклона головы, а также необработанный датчик
значение для переднего ИК-датчика. Затем мы написали класс поведения
который сканировал горизонтально перед роботом, примерно с
Угол 70 ° по обе стороны от корпуса. Максимальный датчик
значение было выбрано из данных сканирования, и его соответствующее панорамирование
Угол был принят как угол, на который голова должна поворачиваться, чтобы быть
перпендикулярно стене (так как максимальное значение датчика будет
происходят в этом положении).Используя этот перпендикулярный угол, мы
можно было бы вычислить расстояние до стены, если бы инфракрасный луч
указывал прямо вперед от точки Кьяры
Посмотреть. См. Схему и уравнение для получения дополнительной информации. Ниже
это скриншоты из режима сканирования, показывающие вычисленное
результат расстояния и график точек данных, собранных во время
сканирование.
Результаты
Мы смогли использовать описанный выше подход для реализации поведение при обнаружении стен, которое демонстрирует, как мы можем определить расстояние до ближайших стен и угол наклона.Робот движется по прямой, чередуя ходьбу и останавливаясь, чтобы выполнить ИК-сканирование перед ним. Когда он обнаруживает что он расположен слишком близко к стене, он вращается параллельно стене стена, а затем обстреливает ее, пока она не окажется близко к стене, таким образом демонстрируя, что он нашел как расстояние, так и угол стена. Наконец, он вращается так, чтобы он был перпендикулярен и лицом от стены; затем поведение начинается заново.
Демонстрационное видео
Неизведанные идеи
Мы не использовали левый или правый ИК-сенсор в нашем поведение.Мы подумали о двух вариантах поведения, в которых можно было бы использовать хотя их. Первый будет использовать необработанные значения датчика из левый и правый ИК-датчики, чтобы Chiara могла измерить расстояние от стен по обе стороны от него. Поведение будет пытаться поддерживать значения датчиков в определенном диапазоне, чтобы робот будет следовать за стенами, но не подходить к ним слишком близко. Второй поведение будет использовать все три датчика для сканирования стен вокруг робота и используйте информацию о расстоянии и угле для построения графика их в локальном пространстве формы.Он может использовать тот же алгоритм, что и MapBuilder для объединения повторяющихся экземпляров одних и тех же стен и устранить несуществующие стены.
Тактический лазерный дальномер TruPulse— ночное видение США
*** Только военные и правоохранительные органы ***
Тактический лазерный дальномер TruPulse
TruPulse Tactical — это самый продвинутый лазерный дальномер, доступный в отрасли, и представляет собой идеальный переносной инструмент LRF для спецназа и снайперов правоохранительных органов.
Обеспечивая быструю и точную информацию с помощью современной лазерной системы, TruPulse Tactical предлагает превосходную оптику и содержит решатель баллистики, который обеспечивает точный выстрел каждый раз. Он помещается в карман жилета, он прочен и водонепроницаем, а также предлагает превосходную оптику с семикратным увеличением. Технология TruTargeting автоматически обеспечивает максимальную точность и дальность обнаружения заданной цели. Он также имеет модификаторы измерения, чтобы отличить желаемую цель наблюдателя от окружающих препятствий, таких как кусты или ветви деревьев, в режимах Ближайший, Самый дальний и Непрерывный.
Просто введите баллистические коэффициенты и дульную скорость для создания до пяти индивидуальных баллистических профилей. Совместите это с данными о атмосферном давлении, температуре, диапазоне и наклоне, и вы получите нужные результаты за считанные секунды. Точечно-матричный ЖК-дисплей с черной маской покажет расчетное баллистическое удержание и поправку на скорость ветра от 5 до 50 миль в час и отобразит их прямо в поле зрения оптики.
TruPulse Tactical избавляет от необходимости вручную рассчитывать текущие погодные условия или использовать баллистическое программное обеспечение на третьем устройстве.Просто загрузите информацию о патроне с помощью нашего фирменного программного обеспечения для ПК для точного программирования и получите мгновенный доступ к вашим индивидуальным баллистическим профилям.
TruPulse Tactical, разработанный с учетом потребностей современных снайперов правоохранительных органов, представляет собой доступное по цене, хорошо продуманное устройство, исключающее использование другого оборудования, экономя деньги и время вашего отдела.
Тактические возможности:
- Измеряет дальность до цели с точностью +/- 1 ярд или +/- 1 м
- Рассчитывает и отображает поправку, необходимую для компенсации падения пули
- Предлагает капельные решения для MOA, MIL, BDC, IN / CM
- Рассчитывает и отображает поправку, необходимую для компенсации ветра
- Предоставляет таблицу поправок на величину ветра с шагом 5 миль в час
- Измеряет и отображает значения датчиков
- Отображает давление, температуру, наклон
Показатели тактического лазерного дальномера TruPulse:
Когда время критично, вам не нужно беспокоиться о ручном вычислении условий, повторной проверке точек данных или записи измерений.Этот универсальный лазер быстро рассчитает баллистическое решение для любых условий, чтобы вы не пропустили выстрел.
Вы сможете четко и уверенно обнаруживать цели с 7-кратным объективом TruPulse Tactical. Большой регулируемый наглазник в сочетании с четкой и четкой оптикой позволяет легко настроить этот лазерный дальномер для достижения оптимальной производительности.
TruPulse Tactical будет единственным оборудованием, которое вам нужно, независимо от того, какую систему прицела вы используете. Индикатор угла, баллистический вычислитель и метеостанция удобно объединены, поэтому вы можете рассчитать дальность и получить баллистическое решение одним нажатием кнопки.
TruPulse Tactical Технические характеристики:
| Диапазон | |
| Диапазон измерения | 10–2500 ярдов * (10–2285 м) * |
| Макс. Компенсированный диапазон | 1400 ярдов (1280 м) |
| Диапазон наклона | ± 90 ° |
| Точность | |
| Диапазон | ± 1 ярд (± 1 м) |
| Точность наклона | ± 1 ° в пределах ± 60 ° |
| Температура | +/- 1 ° обычно ± 2 ° F (± 2 ° C) |
| Давление | ± о.5 дюймов рт. Ст. (± 1,7 кПа) |
| Системы | |
| Измерительная система | Инфракрасный импульсный лазер 905 нм |
| Система отображения | Матричный ЖК-экран с черной маской и точечной проекцией |
| Целевая система | Пространственная проекция прицельной сетки |
| Оптическая система | Монокуляр, вид через объектив, совпадающий с выходным лазерным лучом |
| Увеличение | 7x |
| Поле зрения | 110 ярдов на 1000 ярдов (100 м на 915 м) |
| Пределы баллистических расчетов | |
| Макс.Угол наклона | ± 90 ° |
| Диапазон температур | от -17 до 50 ° C (от 0 до 122 ° F) |
| Диапазон давления | 4 дюйма рт. Ст. (13,5 кПа) — 36 дюймов рт. Ст. (121 кПа) |
| Разное | |
| Варианты удержания | Компенсатор дальности стрельбы или падения пули (BDC), угловые минуты (MOA), миллирадиан (MIL), дюймы (IN) / сантиметры (XM) |
| Размеры Д x Ш x В | 5.2 x 4,5 x 2,1 дюйма (13,2 x 11,4 x 5,3 см) |
| Масса (с аккумулятором) | 14,4 унций (408 г) |
| Структура | Стеклонаполненный поликарбонатный композит |
| Режимы TruTargeting | Стандартный, Ближний, Дальний, Непрерывный |
| Окружающая среда | Водо- и пыленепроницаемость IP55 |
| Класс лазера | FDA, класс 1 (CFR 21) |
| Температура хранения | от -20 до 158 ° F (от -29 до 70 ° C) |
| Источник питания | CR123A |
| Срок службы батареи | Интенсивное использование / яркость: 4-5 часов Среднее использование: 8-10 часов |
* На захват цели могут влиять атмосферные условия, такие как тепловое излучение, пыль, коэффициент отражения цели, угол наклона к цели и распространение луча.
ПРИМЕЧАНИЕ. Все характеристики могут быть изменены без предварительного уведомления.
10-кратный оптический зум 1080P HD EO + IR Двойные датчики с лазерным дальномером Камера с подвесом для отслеживания объектов для дрона БПЛА
SEEKER-10 TIRM — это оптимизированная 3-осевая камера с подвесом, которая объединяет камеру с 10-кратным оптическим зумом , тепловизионную камеру 640 * 480 и лазерный дальномер с дальностью действия 3000 м .
Он разработан на основе технологии FOC, отличается высокой стабильностью, точностью, чувствительностью и низким энергопотреблением.Подвес имеет 2 интеллектуальных режима скорости: FAST speed и LOW speed . Режим высокой скорости используется для малого диапазона масштабирования, режим низкой скорости используется для большого диапазона масштабирования.
Высокоточный лазерный дальномер может точно анализировать долготу и широту , а также расстояние до объекта в пределах 3000 метров . Информация будет отображаться на экране, что сделает камеру более применимой. Кроме того, SEEKER-10 TIRM поддерживает двойные датчики EO + IR слежения за объектом .Скорость отслеживания — до 32 пикселей / кадр, диапазон размеров объекта — от 32 * 32 пикселей до 128 * 128 пикселей с минимальным отношением сигнал / шум (SNR) 4 дБ и среднеквадратичным значением импульсного шума. в положении объекта менее 0,5 пикселя камеры видимого света, что значительно повышает точность и эффект отслеживания.
SEEKER-10TIRM может быть загружен на гексакоптер RHEA 160 и может применяться во многих областях, таких как полицейский надзор и сбор доказательств, проверка линий электропередач, предотвращение стихийных бедствий, мониторинг и инспекция чрезвычайных ситуаций, правоохранительные органы, поисково-спасательные операции и т. Д.
Основные характеристики :
— камера с 10-кратным оптическим зумом
— 640 * 480 ИК-тепловизор с объективом 25 мм
-3000м лазерный дальномер
— Определение местоположения по GPS
— слежение за объектами как для ЭО, так и для ИК-камер
-Два режима управления карданом: БЫСТРАЯ скорость и НИЗКАЯ скорость
-PWM / TTL / S.BUS / TCP несколько методов управления
Технические характеристики:
Вес: 716 г
Размер: 109.2 * 128,1 * 170,1 мм
Рабочее напряжение: 12 В
Динамический ток: 1100 мА при 12 В
Ток холостого хода: 950 мА при 12 В
Температура рабочей среды: -20 ℃ ~ + 60 ℃
Локальное хранилище: TF-карта (до 128 ГБ, класс 10, формат FAT32 или ex FAT)
Характеристики кардана :
Механический диапазон: шаг / наклон: -50 ° ~ 105 °, крен: ± 60 °, рыскание / панорамирование: ± 300 °
Регулируемый диапазон: шаг / наклон: -45 ° ~ 90 °, рыскание / панорамирование: ± 290 °
Угол вибрации: Шаг / Крен: ± 0.02 °, рыскание : ± 0,02 °
Один ключ к центру: поддерживается
Visible Light Camera Spec:
Датчик: 1/3 «CMOS-датчик Panasonic
Всего пикселей: 2,48 M
Разрешение изображения: Full HD 1080 (1920 * 1080)
Оптический зум: 10x, f = 5,1 мм ~ 51 мм
Видеовыход: 1080p / 60, 1080p / 50, 1080p / 30, 1080p / 25
Sync. Система: внутренняя
Отношение сигнал / шум: более 50 дБ
Противотуман: есть
OSD: Да
Тепловизор Технические характеристики:
Размер линзы: 25 мм
Цифровой зум: 1x ~ 4x
Пиксель детектора: 640 * 480
Размер пикселя: 17 мкм
Детектив Дистанция (Мужчина: 1.8×0,5 м): 735 метров
Расстояние распознавания (мужчина: 1,8×0,5 м): 184 метра
Подтвержденное расстояние (человек: 1,8×0,5 м): 92 метра
Детектив Дистанция (Автомобиль: 4,2×1,8 м): 2255 метров
Расстояние распознавания (автомобиль: 4,2×1,8 м): 564 метра
Подтвержденное расстояние (автомобиль: 4,2×1,8 м): 282 метра
Улучшение изображения: автоматическая регулировка яркости и контрастности изображения
Поправка на коэффициент излучения: 0,01 ~ 1
Цветовая палитра: белый, красный как железо, псевдоцвет
ИК-лазерный дальномер Технические характеристики:
Длина волны лазера: 1550 нм
Оптическая апертура: 13 мм на передачу / 17 мм на прием
Измерение способности: 3000 м
Частота измерения: 2 Гц
Измерение нескольких целей: макс.3 значения расстояния до цели, возвращающие
Разрешение объекта (типичное значение): 30 м
В вашу покупку входят:
1x SEEKER-10TIRM Двухсенсорная камера с 10-кратным зумом и 3-осевым стабилизатором
1x Наборы принадлежностей
Демпфирующий шар 4X
4 медных цилиндра
Типы датчиков расстояния и как их выбрать?
Что касается датчиков расстояния, существует много типов; ультразвуковой, ИК-приближение, лазерное расстояние и т. д.и выбор подходящего для вашего следующего проекта Arduino или Raspberry Pi может оказаться сложной задачей. Поэтому сегодня мы рассмотрим множество датчиков расстояния, их типы и ответим, какой из них лучше всего подходит для вас!
Я расскажу следующее:
- Что такое датчики расстояния и как они работают?
- Типы датчиков расстояния
- Сравнение датчиков расстояния: Как выбрать датчик расстояния?
Что такое датчики расстояния?
Как следует из названия, чтобы легко определить датчики расстояния, это датчики, используемые для определения близости объекта без какого-либо физического контакта.
Как работает датчик расстояния?
Обычно ассоциируется с ультразвуковыми датчиками, он функционирует путем вывода сигнала (в зависимости от технологии; ультразвуковые волны, ИК, светодиоды и т. Д.) И измерения изменений при возврате сигнала.
- Измерение изменения может быть в форме:
- Время, необходимое для возврата сигнала
- Интенсивность возвращенного сигнала
Датчик расстояния и датчики приближения
Поскольку датчики расстояния могут быть обычно связаны с датчиками приближения из-за аналогичной корреляции, функциональность любого датчика может быть легко неправильно понята.Поэтому вот краткое сравнение между ними, чтобы помочь вам понять, в чем разница между датчиками расстояния и датчиками приближения.
- Датчики приближения определяют, находится ли объект в зоне обнаружения, в которой датчик предназначен для работы. Следовательно, необязательно указывать расстояние между датчиком и объектом.
- Узнайте больше о датчиках приближения здесь!
- Датчики расстояния определяют расстояние от объекта и измерительного устройства, подавая ток.Токи могут быть в форме ультразвуковых, лазерных, инфракрасных волн и т. Д.
Типы датчиков расстояния
Теперь, когда у нас есть понимание того, что такое датчики расстояния, мы рассмотрим различные датчики измерения расстояния, представленные на рынке, каждый со своими собственными сенсорными технологиями.
Вот краткое изложение различных типов датчиков расстояния!
Ультразвуковой датчик
Что такое ультразвуковой датчик?
Пожалуй, наиболее распространенным типом датчика измерения расстояния является ультразвуковой датчик, также известный как датчик сонара, он определяет расстояние до объектов путем излучения высокочастотных ультразвуковых волн.
Принцип работы ультразвукового датчика
- Ультразвуковой датчик излучает высокочастотные звуковые волны по направлению к целевому объекту
- Целевой объект улавливает звуковые волны
- Затем звуковые волны отражаются и отражаются обратно к ультразвуковому датчику
- Время, необходимое звуковой волне возврат используется как измерение расстояния между
Основные области применения ультразвукового датчика
Теперь, когда мы поняли, как это работает, давайте посмотрим, для чего он используется.Вот общие области применения ультразвуковых датчиков расстояния:
- Измерение расстояния
- Роботизированные датчики
- Умные автомобили
- Да, Tesla использует ультразвуковые датчики как часть своей программы автопилота!
- Беспилотные летательные аппараты (БПЛА)
Преимущества ультразвуковых датчиков
- Не зависит от цвета и прозрачности объекта, поскольку он определяет расстояние посредством звуковых волн
- Хорошо работает в темных местах
- Имеет тенденцию потреблять меньший ток / мощность
- Несколько вариантов интерфейса для сопряжения с микроконтроллером и т. Д.
Недостатки ультразвуковых датчиков
- Ограниченный диапазон обнаружения
- Низкое разрешение и низкая частота обновления, что делает его непригодным для обнаружения быстро движущихся целей
- Невозможно измерить расстояние до объектов с экстремальной текстурой / поверхностью
Grove — ультразвуковой датчик: Улучшенная версия HC-SR04
Чтобы ультразвуковой датчик был похож на Arduino, вам понадобится модуль ультразвукового датчика.Я рекомендую использовать Grove — ультразвуковой датчик, который обладает значительными преимуществами по сравнению с популярным HC-SR04!
Интересно, почему это лучший вариант, чем HC-SR04? Вот сравнительная таблица!
| Grove — Ультразвуковой датчик расстояния | HC-SR04 | |
|---|---|---|
| Рабочее напряжение | Совместимость с 3,3 В / 5 В Широкий уровень напряжения: 3,2 В — 5,2 В |
5 В |
| Диапазон измерения | 3–350 см | 2–400 см |
| Требуются контакты ввода / вывода | 3 | 4 |
| Рабочий ток | 8 мА | 15 мА |
| Размеры | 50 мм x 25 мм x 16 мм | 45 мм x 20 мм x 15 мм |
| Простота сопряжения с Raspberry Pi | Легко, прямое подключение к вводу / выводу Raspberry Pi | Требуется схема преобразования напряжения |
Из таблицы видно, что ультразвуковой датчик Grove — более универсальный вариант:
- Поддерживает более широкий уровень напряжения
- Требуется меньше контактов ввода / вывода
- Более простое сопряжение с Raspberry Pi
Хотите узнать больше? Вы можете ознакомиться со следующими ресурсами:
ИК-датчики расстояния
На втором месте в этом списке находятся инфракрасные датчики расстояния, сокращенно инфракрасные.Чаще всего ассоциируется с Sharp GP2Y0A21YK0F, он определяет расстояние или приближение за счет излучения ИК-луча и вычисления угла отражения.
Инфракрасные датчикипоставляются с двумя линзами:
- Линза излучателя ИК-светодиода, излучающая световой луч
- Фотодетектор с чувствительностью к положению (PSD), где отраженный луч падает на
Принцип работы ИК-датчиков расстояния Датчики расстояния
работают по принципу триангуляции; измерение расстояния на основе угла отраженного луча.
Вот иллюстрация того, как инфракрасные датчики расстояния работают через триангуляцию:
- Инфракрасный свет излучается ИК-излучателем светодиода
- Луч света попадает на объект (P1) и отражается под определенным углом
- Отраженный свет достигает PSD (U1)
- Датчик в PSD будет затем определите положение / расстояние до отражающего объекта
Основные области применения ИК-датчиков
- Телевизоры, компьютеры, ноутбуки
- Измерение расстояния
- Системы безопасности, такие как наблюдение, охранная сигнализация и т. Д.
- Приложения для мониторинга и управления
Преимущества ИК-датчиков
- Малый форм-фактор; Обычные ИК-датчики, такие как датчики Sharp, обычно меньше по размеру. Недостатки ИК-сенсоров
- Ограниченный диапазон измерения
- Под влиянием условий окружающей среды и твердых предметов; невозможно использовать через стены или двери
Рекомендуемые ИК-датчики
Grove — Инфракрасный датчик приближения 80 смЭтот ИК-датчик приближения, созданный на основе SHARP gp2y0a21yk0f, является популярной рекомендацией для всех, кто ищет простое определение расстояния Arduino.
Этот инфракрасный датчик приближения, выполненный в компактном форм-факторе с низким энергопотреблением, обеспечивает непрерывное считывание расстояния в диапазоне от 10 до 80 см!
Хотите узнать больше? Вы можете ознакомиться со следующими ресурсами:
ИК и ультразвуковойТеперь, когда мы разобрались как с инфракрасными, так и с ультразвуковыми датчиками, вам может быть интересно, в чем разница между инфракрасными и ультразвуковыми датчиками? Вот сравнительная таблица, которая демонстрирует различия:
ИК-датчик расстояния Ультразвуковой датчик Что он делает Измерение расстояния в отраженных световых волнах Измерение расстояния через отраженные звуковые волны Как это измеряет Триангуляция: измеряется угол отраженного ИК-луча Регистрируется время между передачей и приемом звуковых волн Человеческие отношения Невидимый невооруженным глазом Невыносимое Требования к объекту Подходит для измерения сложных объектов Не подходит для измерения объектов со сложной поверхностью
Лазерные датчики расстояния: датчики LIDARLiDAR, сокращенно от Light Detection and Ranging, можно рассматривать как лазерный датчик расстояния.Он измеряет дальность до цели с помощью световых волн лазера, а не радио- или звуковых волн.
Принцип работы LIDARЕсть несколько способов объяснить, как работает лидар (например, триангуляция, база импульсов и т. Д.), Но самый простой способ:
ref- Передатчик на устройстве LiDAR излучает лазерный свет на целевой объект
- Затем импульс лазера улавливается целью и отражается назад
- Расстояние затем вычисляется с использованием отношения между постоянной скоростью света в воздухе и время между отправкой / получением сигнала
Ключевые приложения LiDAR
- Экологический мониторинг; лесное хозяйство, картографирование и др.
- Измерение расстояния
- Управление машиной и безопасность
- Робототехника
Преимущества LiDAR
- Высокий диапазон измерения и точность
- Возможность измерения трехмерных структур
- Высокая частота обновления; подходит для быстро движущихся объектов
- Малые длины волн по сравнению с сонаром и радаром; хорошо обнаруживает мелкие объекты
- Подходит для использования днем и ночью
Недостатки LiDAR
- Более высокая стоимость по сравнению с ультразвуком и ИК.
- Вредно для невооруженного глаза; LiDAR-устройства более высокого уровня могут использовать более сильные LiDAR-импульсы, которые могут повлиять на человеческий глаз
Рекомендуемые датчики LiDARНе бойтесь высокой стоимости, которую приносит LiDAR, так как здесь, в Seeed, мы предлагаем миниатюрный датчик приближения LiDAR, который очень доступен по цене и легко сочетается с вашим Arduino!
Хотите узнать об этом больше? Вы можете перейти на страницу нашего продукта!
Светодиодные времяпролетные датчики расстояния
Наконец, мы рассмотрим светодиодные датчики времени пролета.Чаще всего ассоциируется с VL53L0X, это часть более широкого спектра LIDAR, в котором для измерения расстояний используется времяпролетная технология.
Что такое времяпролетные датчики и принцип их работы ДатчикиTime-of-Flight — это датчики, которые измеряют время, необходимое волновому импульсу, чтобы отразиться от объекта и вернуться к датчику. Он способен создавать трехмерное изображение по осям X, Y, Z с помощью одного снимка, измеряя время, которое требуется свету, чтобы пройти от излучателя к приемнику.
Благодаря технологии времени пролета он обеспечивает значительные преимущества по сравнению с другими используемыми методами определения расстояния:
- Более широкий диапазон
- Более быстрые показания
- Более высокая точность
Датчики времени пролета работают аналогично датчикам LiDAR, где:
- Передатчик на времяпролетном устройстве излучает свет ИК-светодиода на целевой объект
- Затем импульс светодиода улавливается целью и отражается обратно
- Затем рассчитывается расстояние с использованием соотношения между постоянными скорость света в воздухе и время между отправкой / получением сигнала
Ключевые области применения времяпролетных датчиков:
- Промышленное применение
- Машинное зрение
- Робототехника
- Подсчет людей
- Дроны
Преимущества датчиков времени полета:
- Такая технология обеспечивает высокий диапазон измерений с точностью
- Возможность создания трехмерных изображений
- Используется в широком спектре приложений благодаря своей способности распознавать крупные объекты
Недостатки времяпролетных датчиков
- Более высокая стоимость
- Разрешение по глубине по оси Z все еще низкое с обычными системами, предлагающими разрешение по оси Z 1 см
Рекомендуемый датчик времени пролета
Grove — Датчик времени полета (VL53L0X)Поддерживая свою популярность, VL53L0X включает в себя передовой массив SPAD и запатентованную технологию FlightSense второго поколения компании ST.Это позволяет измерять абсолютные расстояния до 2 м!
Вышеуказанная рекомендация также является частью нашей системы Grove, что упрощает сопряжение с вашим Arduino!
Хотите узнать об этом больше? Вы можете ознакомиться со следующими ресурсами:
Сравнение датчиков расстояния
Теперь, чтобы помочь вам выбрать подходящий датчик расстояния, я привел сводную таблицу ниже, в которой указано, на что вы должны обратить внимание при выборе.
Однако, поскольку у всех четырех из них есть свои плюсы и минусы, вам нужно сначала определить вашу предполагаемую цель / приложение, прежде чем выбирать одно!
Ультразвуковые датчики ИК-датчик Датчики LiDAR Время пролета Пригодность для дальнего обнаружения Нет Нет Да Да Нет Нет Да Да Стоимость Низкая Низкая Высокая Умеренная Возможность использования для сложных объектов Да Чувствительность к внешним условиям Да Нет Нет Нет Совместимость с 3D-изображениями Нет Нет Да Да Из таблицы мы можем сделать вывод, что как ультразвуковые, так и инфракрасные датчики расстояния больше подходят для проектов Arduino, которые требуют более короткого расстояния.В то время как датчики LiDAR и Time-of-flight будут рекомендованы для тех, кто ищет более высокие возможности зондирования и 3D-изображения!
СводкаЭто все, что касается сегодняшнего руководства по датчикам расстояния. Я надеюсь, что это помогло вам лучше понять и принять лучшее решение о покупке!
Для совместимости с датчиком расстояния Arduino вы можете рассмотреть рекомендуемые продукты Seeed для каждого типа! Это сэкономит ваше время, пытаясь сделать датчик расстояния самостоятельно!
- Рекомендация ультразвукового датчика:
- Рекомендация ИК-датчика:
- Рекомендация лазерного датчика расстояния:
- Рекомендация датчика времени полета:
Для получения дополнительной информации о датчиках приближения вы можете проверить моя предыдущая статья здесь!
Следите за нами и ставьте лайки:
Теги: датчик расстояния, датчик расстояния arduino, определение датчика расстояния, сравнение датчиков расстояния, расстояние и приближение, инфракрасный датчик, ИК-датчик расстояния, ИК-датчик, лазерный датчик расстояния, лидар, приближение, время полета, типы датчиков расстояния, ультразвуковой датчик , что такое датчик расстоянияПродолжить чтение
Teradek TOF.1 дальномер со следящим автофокусом
Teradek анонсировала дальномер TOF.1 для беспроводных систем управления объективами RT. TOF.1 рекламируется как доступный и легкий инфракрасный дальномер, совместимый с беспроводными системами управления объективами RT Teradek.
Дальномер с AF
TOF.1 дает съемникам фокусировки точные измерения расстояния в реальном времени между фокальной плоскостью камеры и снимаемым объектом. Дальномеры существуют уже давно, но одна из функций, которые выглядят интересными в TOF.1 — это новая функция автофокусировки, которая может непрерывно отслеживать объект и мгновенно настраивать двигатель объектива.
После того, как TOF.1 правильно откалиброван с помощью MDR.X, автофокусировка активируется простым переключением включения / выключения. Оператор выбирает конкретную точку слежения за фокусировкой, а информация о близости объекта из TOF.1 используется для мгновенной регулировки с помощью мотора объектива для поддержания постоянной критической фокусировки. Утверждается, что запатентованный алгоритм сглаживания предотвращает чрезмерное дрожание в двигателе объектива.
Это довольно впечатляющая функция, и будет интересно посмотреть, насколько хорошо она работает в полевых условиях.
Особенности продукта
- Точность прямой видимости до 25,4 м (80 футов)
- ИК-датчик с полем зрения 3 °
- Частота обновления 60 измерений в секунду
- Показания расстояния на MDR.X, CTRL.1 и CTRL .3
- Функция автофокуса с Teradek RT
- Один кабель для Power + Control
- Съемный лазерный прицел для максимальной точности
- Настраиваемые наложения расстояния на мониторах SmallHD
Функции
TOF.1 оснащен массивом ИК-датчиков, который может обнаруживать объекты в пределах прямой видимости на расстоянии до 80 футов (25,4 м). Входящий в комплект съемный лазерный прицел можно центрировать по полю зрения датчика для достижения очень хорошей точности. Светодиодные инфракрасные лучи измеряют расстояние до объектов в поле зрения датчика приближения TOF.1 с углом обзора 3 градуса при прямой видимости на расстоянии до 100 футов. Общий радиус поля зрения сенсора будет сужаться или расширяться по мере того, как объект движется к / от камеры, что обеспечивает широкий диапазон фокусного обнаружения от макросъемки до больших расстояний.
И питание, и управление обеспечиваются одним кабелем управления к приемнику управления объективами MDR.X, а показания расстояния TOF.1 отображаются на парных беспроводных портативных контроллерах объектива CTRL.1 или CTRL.3, а также на подключенных мониторах SmallHD. . Частота обновления датчика составляет 60 измерений в секунду, что означает, что каждое движение объекта регистрируется, а показания приближения предоставляются в режиме реального времени.
Вы можете подключить любой контроллер объектива к любому совместимому монитору SmallHD и активировать PageOS 4 RT Overlays для просмотра показаний расстояния на экране, размер которых можно регулировать для индивидуального рабочего процесса мониторинга.
Маленький и легкий
TOF.1 имеет точку крепления ¼ ”-20 и весит всего 125 г (4,5 унции). Он имеет физические размеры 58 мм x 58 мм x 34 мм (2,3 дюйма x 2,3 дюйма x 1,3 дюйма).
Дополнение к уже впечатляющей системе
В прошлом году я рассмотрел комплект Teradek RT CTRL.3 Deluxe Kit. Этот комплект состоял из приемника MDR.X, трех двигателей MOTR.X и CTRL.3 с наложением данных объектива и данных объектива на мониторы SmallHD.
Цена и наличие
TOF.1 уже отправляется по цене 3 490 долларов США.
Мэтью Аллард ACSМэтью Аллард — аккредитованный ACS внештатный директор по фотографии, удостоенный множества наград, с 30-летним опытом работы в более чем 50 странах мира.
Он является редактором Newsshooter.com и пишет на сайте с 2010 года.
Мэтью получил 41 награду ACS, в том числе четыре престижных Золотых треноги. В 2016 году он получил премию за лучшую операторскую работу на 21-й азиатской телевизионной премии.
Похожие записи
 .
.