Что такое инкрементальный энкодер. Как устроен инкрементальный энкодер. Какие бывают типы инкрементальных энкодеров. Где применяются инкрементальные энкодеры. Каковы преимущества инкрементальных энкодеров.
Что такое инкрементальный энкодер и как он работает
Инкрементальный энкодер — это устройство, которое преобразует угловое или линейное перемещение в последовательность электрических импульсов. Основной принцип его работы заключается в следующем:
- На вращающемся диске энкодера нанесены метки (обычно это прорези или отражающие участки)
- При вращении диска эти метки проходят мимо неподвижного датчика
- Датчик генерирует электрический импульс при прохождении каждой метки
- Количество импульсов пропорционально углу поворота вала энкодера
Таким образом, подсчитывая импульсы, можно определить величину перемещения. А по частоте следования импульсов — скорость вращения.
Устройство инкрементального энкодера
Основными компонентами инкрементального энкодера являются:

- Кодовый диск с нанесенными метками
- Источник света (светодиод)
- Фотоприемник
- Электронная схема обработки сигналов
- Корпус с подшипниками
- Вал для соединения с контролируемым механизмом
В оптических энкодерах свет проходит через прорези диска и попадает на фотоприемник. В магнитных энкодерах вместо оптической системы используются магниты и датчики Холла.
Основные типы инкрементальных энкодеров
По принципу действия инкрементальные энкодеры делятся на следующие основные типы:
Оптические энкодеры
Используют оптическую систему из светодиода и фотоприемника. Обеспечивают высокое разрешение, но чувствительны к загрязнениям.
Магнитные энкодеры
Работают на основе эффекта Холла. Более устойчивы к загрязнениям и вибрациям по сравнению с оптическими.
Механические энкодеры
Простейший тип, использующий механические контакты. Имеют низкое разрешение и ограниченный срок службы.
Области применения инкрементальных энкодеров
Инкрементальные энкодеры широко используются в различных отраслях промышленности и техники:

- Станки с ЧПУ — для контроля положения рабочих органов
- Робототехника — определение положения звеньев манипуляторов
- Лифты — контроль скорости и положения кабины
- Конвейерные линии — измерение скорости ленты
- Упаковочное оборудование — синхронизация движений
- Измерительные приборы — точное позиционирование
Преимущества инкрементальных энкодеров
Основными достоинствами инкрементальных энкодеров являются:
- Простота конструкции
- Невысокая стоимость
- Высокое разрешение (до десятков тысяч импульсов на оборот)
- Возможность определения направления вращения
- Высокая скорость работы
- Широкий диапазон рабочих температур
Эти преимущества обеспечивают широкое применение инкрементальных энкодеров в системах автоматизации и управления движением.
Как выбрать инкрементальный энкодер
При выборе инкрементального энкодера следует учитывать следующие основные параметры:
- Разрешение (количество импульсов на оборот)
- Максимальная скорость вращения
- Тип выходного сигнала (TTL, HTL и др.)
- Степень защиты корпуса (IP)
- Диаметр вала и способ крепления
- Рабочая температура
- Устойчивость к вибрациям и ударам
Правильный выбор этих параметров позволит подобрать энкодер, оптимально соответствующий конкретной задаче.

Основные производители инкрементальных энкодеров
На рынке представлено множество производителей инкрементальных энкодеров. Среди наиболее известных можно выделить:
- Heidenhain (Германия)
- Renishaw (Великобритания)
- Sick (Германия)
- Kubler (Германия)
- Pepperl+Fuchs (Германия)
- Encoder Products Company (США)
- Dynapar (США)
Эти компании предлагают широкий ассортимент энкодеров для различных применений и условий эксплуатации.
Перспективы развития инкрементальных энкодеров
Основные направления совершенствования инкрементальных энкодеров включают:
- Повышение разрешающей способности
- Улучшение точностных характеристик
- Расширение диапазона рабочих температур
- Увеличение устойчивости к внешним воздействиям
- Миниатюризация конструкции
- Интеграция дополнительных функций (диагностика, самокалибровка)
Это позволит расширить области применения инкрементальных энкодеров и повысить эффективность систем автоматизации.
Принцип работы инкрементальных (инкрементных) энкодеров
Инкрементальные энкодеры применяются на серводвигателях в качестве устройства обратной связи для определения положения и направления вращения вала. Кроме того контроллеры двигателей могут использовать данные от энкодеров для расчета скорости и ее контроля. Инкрементальный энкодер является критическим компонентом, который передает важные данные необходимые для автоматического управления различными системами движения от автономных транспортных средств до торговых автоматов.
Двухканальный инкрементальный энкодер на выходе имеет два сигнала, которые обычно обозначаются как канал А и канал В. Данные сигналы называются квадратурными, потому что между ними существует смещение фазы в 90 градусов (см. рис.1)
Рис.1
Разработчики могут использовать эту разницу фаз для определения направления вращения. В случае вращения в одном направлении сигнал в канале А изменяется от низкого уровня к высокому раньше чем в канале В, то есть канал А ведет канал В. При вращении в противоположном направлении канал В ведет канал А. Направление вращения серводвигателя определяется при помощи датчиков установленных на валу двигателя (см. рис.2 ниже).
При вращении в противоположном направлении канал В ведет канал А. Направление вращения серводвигателя определяется при помощи датчиков установленных на валу двигателя (см. рис.2 ниже).
Рис. 2 Использование сигналов каналов А и В для определения вращения
Сигналы каналов А и В также используются для определения положения ротора. При регистрации квадратурного сигнала выполняется подсчет переходов сигнала от низкого уровня к высокому и от высокого к низкому, в обоих каналах. Такой подсчет дает четыре отсчета для каждого цикла сигнала. Таким образом, по количеству отсчетов на оборот, можно определить положение вала с точностью большей, чем базовое разрешение энкодера, который определяет положение по количеству отсчетов на один оборот (которое иногда называют количеством линий на оборот — в случае оптического энкодера), см. рис. 3 ниже.
Рис. 3
Трехканальный инкрементальный энкодер состоит из каналов А и В, и дополнительного опорного канала, обозначаемого как индекс. Индексный канал генерирует один отсчет на оборот при прохождении вала определенного положения. Импульс индексного канала может быть стробированным или не стробированным. Фронты не стробированного импульса индексного канала не совпадают с фронтами импульсов в каналах А и В. Фронты стробированного импульса индексного канала будут совпадать с высоким или низким уровнем в одном или обоих каналах А и В. Обычно используют стробированный канал индекс, который совпадает с сигналом в каналах А и В. См. рис.4
Индексный канал генерирует один отсчет на оборот при прохождении вала определенного положения. Импульс индексного канала может быть стробированным или не стробированным. Фронты не стробированного импульса индексного канала не совпадают с фронтами импульсов в каналах А и В. Фронты стробированного импульса индексного канала будут совпадать с высоким или низким уровнем в одном или обоих каналах А и В. Обычно используют стробированный канал индекс, который совпадает с сигналом в каналах А и В. См. рис.4
Рис. 4. Временная диаграмма трехканального инкрементального энкодера с сравнением синхронизированного и не синхронизированного импульса в индексном канале.
Индексный сигнал обычно используется для определения центрального положения, исходного положения точки обнуления или нулевой отметки. Он часто используется в сочетании с некоторым типом датчика приближения, который обеспечивает определение приближения к начальному положению. Все три выхода энкодера: А, В и индекс могут быть как с несимметричными, так и с симметричными выходами.
Выходы дифференциальной линии драйвера более невосприимчивы к электрическим помехам, чем сигналы несимметричных линий, потому дифференциальные линии могут быть большей длины. Эти выходы являются комплементарными сигнальными парами, когда сигнал имеет высокий уровень, а другой низкий, как это показано на рисунке 6. Каждый дифференциальный выход требует двух проводов; обычно используют витые пары для увеличения помехоустойчивости. Драйверы дифференциальной линии имеют низкий импеданс, что делает устойчивыми к помехам.
Рис. 5. Схема подключения трехканального энкодера с несимметричным выходом
Выходы дайвера дифференциальных линий, как правило, более устойчивы в отношении электрических помех в сравнении с однопроводными линиями. Эти выходы являются комплементарными, потому, когда сигнал в одной линии высокого уровня, в другой линии он низкого уровня, как это показано на рис.6. Каждая дифференциальная пара состоит из двух проводов; обычно витые пары используются для повышения помехоустойчивости сигнальных линий. Дифференциальные линейные драйверы имеют низкий импеданс, что делает устойчивыми к помехам.
Рис.6. Временная диаграмма драйвера дифференциальной линии энкодера
Рис. 7. Обработка дифференциального сигнала линейным драйвером
Принцип действия инкрементального энкодера на примере Baumer
07.02.2022
Содержание:
- Определение
- Конструкция
- Принцип действия
- Технические характеристики
- Преимущества
- Сфера применения
- Как выбрать инкрементальный энкодер
Энкодер представляет собой специальный датчик, преобразующий угловое перемещение в электрический сигнал. Существует 2 основных типа энкодеров: инкрементальные и абсолютные. В этой статье разберем принцип действия инкрементальных энкодеров, а также их конструкцию, виды, сферы применения и преимущества.
Существует 2 основных типа энкодеров: инкрементальные и абсолютные. В этой статье разберем принцип действия инкрементальных энкодеров, а также их конструкцию, виды, сферы применения и преимущества.
Энкодер
Инкрементальный энкодер также называется импульсным или пошаговым. Связано это с тем, что при вращении он формирует на выходе последовательность электрических импульсов. Подсчитывая сигналы с помощью вторичного-счетного устройства, можно делать выводы о скорости и направлении вращения, количестве полных оборотов, угловом перемещении.
Конструкция инкрементального энкодера
Рассмотрим основные элементы любого инкрементального энкодера на примере BAUMER BDK 06.24K200-L5-5:
- Вал — подразделяется на полый и сплошной. Например, энкодер Baumer, представленный на рисунке, имеет сплошной вал.
- Фланец — может быть квадратным, синхронным и зажимным. На приведенном примере датчик имеет зажимной фланец.
- Кодовый диск — располагается внутри датчика и имеет на своей поверхности специальные метки.
 Количество этим меток называют дискретностью устройства — от этого параметра зависит, сколько импульсов будет на выходе за один полный оборот. Диск датчика, рассмотренного в качестве примера, имеет 200 рисок и соответственно дискретность его равна 200 импульсам за один оборот.
Количество этим меток называют дискретностью устройства — от этого параметра зависит, сколько импульсов будет на выходе за один полный оборот. Диск датчика, рассмотренного в качестве примера, имеет 200 рисок и соответственно дискретность его равна 200 импульсам за один оборот. - Измерительный датчик — сенсор, который срабатывает при попадании в его чувствительную зону метки кодового диска. Датчики подразделяются по типу действия. Самыми популярными являются магнитные и оптические. В рассматриваемом энкодере используется оптический датчик.
Также любой датчик имеет в своей конструкции подшипники, электрическую плату, разъем для подключения кабеля.
Принцип действия инкрементального энкодера
Рассмотрим работу оптического энкодера на примере модели RVI50N-09B от PEPPERL+FUCHS. Диск датчика имеет 2500 меток, которые представляют собой сквозные отверстия. Датчик состоит из оптического излучателя и фотоприемника, установленных четко друг напротив друга.
Когда диск находится в движении, то происходит постоянное прерывание оптического луча. Это приводит к срабатыванию датчика и формированию электрических импульсов на выходе.
У рассматриваемого энкодера на выходе формируются следующие типы сигналов:
- А и В — два смещенных относительно друг друга сигнала, по ним можно определить направление вращения. Например, если фаза В отстоит от А, то вращение происходит в одну сторону, а если наоборот, то в другую.
- А и В – инвертированные сигналы, также их называют дифференциальными. Используются в качестве контрольного канала для улучшения ка
чества передачи сигнала и снижения возможности ошибки. - Референтная метка 0 или Z – это нулевая точка, сигнал для которой формируется только 1 раз за полный оборот. Считывая сигналы с канала А или В относительно этой точки, можно вычислять точное угловое положение вала.
У магнитных энкодеров, например ELTRA EMI38F100S5/28P6X6PR, на диске нанесена магнитная шкала, на которой попеременно располагаются разноименные полюса. Считывающий элемент реагирует на изменение полюса, за счет чего формируется последовательность сигналов на выходе.
Считывающий элемент реагирует на изменение полюса, за счет чего формируется последовательность сигналов на выходе.
Основные технические параметры
Любой инкрементальный энкодер обладает следующим набором характеристик:
- Питающее напряжение — обычно используется от 4 до 30 VDC.
- Принцип действия — оптический и магнитный. Преимущества каждого из видов рассмотрено ниже.
- Дискретность или разрешение — количество оборотов за импульс. Чем больше оборотов, тем энкодер точнее. Например, датчик BAUMER BHF 1P.05A80000-B2-5 имеет разрешение 80000 имп/оборот.
- Максимальная скорость вращения — количество полных оборотов в минуту, при которых энкодер выдает импульсы без пропусков.
- Защитное исполнение корпуса — защита от влаги и пыли. В международной классификации IP.
- Присоединительные размеры — диаметр вала и его тип: полый или сплошной.
- Тип электрического подключения — встроенный кабель или разъем.

- Эксплуатационные характеристики — диапазон рабочей температуры, влажность, допустимые механические нагрузки и т.п.
Все вышеперечисленные параметры можно найти в документации на энкодеры или у нас на сайте в разделе “характеристики”.
Например, инкрементальный энкодер Pepperl+Fuchs RVI50N-09BK0A3TN-2500 имеет следующие параметры:
- Питающее напряжение: 5 VDC.
- Принцип действия: Оптический.
- Разрешение: 2500 импульсов на оборот.
- Максимальная скорость вращения: 10000 оборотов в минуту.
- Защитное исполнение корпуса: IP 50.
- Присоединительные размеры: сплошной вал длинной 15 мм и диаметром 8 мм.
- Тип электрического подключения: встроенный 5-ти жильный кабель длиной 0.5 м.
- Эксплуатационные характеристики:
- Рабочая температура: -20 … 70 ° C для кодового диска из стекла.
- Нагрузка на вал: радиальная 50 Н и осевая 30 Н.
Преимущества инкрементальных энкодеров
Инкрементальный энкодер — это отличное решение для задач контроля угловых скоростей и перемещений.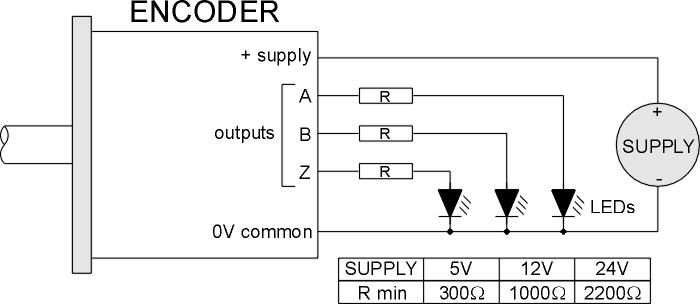 Разберем ключевые преимущества каждого из типов:
Разберем ключевые преимущества каждого из типов:
Оптические
- Высокое разрешение.
- Простая конструкция.
- Низкая стоимость.
- Достаточно высокая точность.
Магнитные
- Высокое разрешение.
- Прочная и долговечная конструкция.
- Высокая точность.
- Надежность.
- Устойчивость к механическим воздействиям и вибрации.
- Менее требовательны к соосности при монтаже
При этом не стоит забыть про ограничение инкрементальных энкодеров, которое заключается в узком рабочем диапазоне температур. Так, оптические устройства работают в диапазоне от -20 до +70 °C. Магнитные устройства имеют более широкий диапазон от -100 до + 125 ° C. Также оптические устройства менее прочны, и могут выйти из строя из-за сильного механического внешнего воздействия или постоянной вибрации.
Сферы применения знкодеров инкрементального типа
Чтобы понять, где применяется инкрементальный тип энкодеров, следует помнить, что эти устройства выдают последовательность импульсов при вращении. Это вводит одно важное условие: в момент включения инкрементальный энкодер не может показать текущее положении вала. В этом заключается главное его отличие от абсолютного типа датчика.
Это вводит одно важное условие: в момент включения инкрементальный энкодер не может показать текущее положении вала. В этом заключается главное его отличие от абсолютного типа датчика.
С нюансом разобрались, теперь определимся какие задачи может решать инкрементальный энкодер и в каких сферах деятельности человека это востребовано.
Энкодер решает выполняет следующие функции:
- Измеряет скорость вращения — чем больше импульсов приходит на вторичное устройство, тем выше скорость. Чтобы вычислить число оборотов в минуту необходимо подсчитать количество импульсов за одну минуту и разделить его на разрешение датчика. Для более точных измерений необходимо производить расчет от нулевой точки.
- Контроль правильности вращения — при наличии двух смещенных сигналов А и В.
- Угловое перемещение — для этого в начале работы требуется установить вал на нулевую точку. Например, для энкодера с разрешение 1000 об/мин, поворот на 180° будет равняться 500 импульсам от нулевой точки.

Решение вышеперечисленных задач востребовано в отраслях, где требуется высокоточное позиционирование, перемещение и регулирование скорости вращения различных устройств, например:
- Станочное оборудование.
- Робототехнические комплексы.
- Лифтовое оборудование.
- Грузоподъемные сооружения и краны.
- Фасовочные и производственные линии.
И многое другое.
Как подобрать инкрементальный энкодер
Подбор оптимальной модели энкодера для решения вашей задачи следует доверить профессионалам с многолетним опытом в сфере обеспечения производств средствами контроля и измерения. Для этого вы можете обратиться за бесплатной консультацией к нашим специалистам. Они ответят на все вопросы и подберут модель датчика, точно подходящую под ваше применение, без лишнего функционала, который только увеличивает стоимость устройства.
Если вы осуществляете подбор датчика самостоятельно, то следует учесть следующее:
- Точность измерений — этот параметр зависит от разрешения энкодера.
 При этом следует учитывать максимально возможную частоту считывания сигнала устройствами, имеющимися у вас на предприятии.
При этом следует учитывать максимально возможную частоту считывания сигнала устройствами, имеющимися у вас на предприятии. - Скорость вращения контролируемого оборудования — должна быть меньше, чем максимальная скорость энкодера. Иначе показания будут недостоверными, а подшипниковый узел датчика быстро выйдет из строя.
- Условия эксплуатации — наличие вибраций в рабочей зоне, пыли и влаги, температура. Ответы на эти вопросы определят тип инкрементального энкодера и его защитное исполнение.
- Определить способ технологического присоединения — энкодеры могут поставляться вместе с аксессуарами, которые заметно упрощают монтаж устройства.
- Типы выходных сигналов — это зависит от решаемой задачи, если требуется лишь контроль скорости, то хватит одного сигнала А.
Подписывайтесь на наши обновления:
Инкрементальный энкодер (принцип работы, типы, области применения, преимущества)
В этом тексте мы объясним общее определение энкодеров и их первого подмножества, инкрементальные энкодеры, классификацию инкрементальных энкодеров и их применение, разницу между инкрементальными и абсолютные энкодеры, а также особенности и преимущества инкрементных энкодеров.
Энкодер представляет собой электрическое механическое устройство, которое преобразует 9От 0006 вращательного или линейного движения до цифрового или даже аналогового импульса или бита в ответ на вращательное движение вала (для использования в различных системах управления и АРН).
Таким образом, для каждого полного оборота вала энкодера на 360 градусов формируется цифровой пакет, который затем декодируется другим оборудованием или декодером.
Этот пакет содержит важную информацию, такую как скорость, перемещение, ускорение скорости, угловая скорость или угол поворота, пройденное расстояние и…
Инкрементальный энкодер известен как один из наиболее часто используемых поворотных энкодеров и наиболее распространенный метод измерения положения и скорости в процессорных системах.
Инкрементальный энкодер – это тип энкодера, который создает информацию о положении, угле и числе поворотов и преобразует эту информацию, такую как угловое движение или положение вала , в аналоговый или цифровой код с помощью оптического диск для определения положения или движения.
Инкрементный энкодер может измерять только относительное перемещение вала или ползуна , а для измерения абсолютного положения необходимо использовать другие средства , а требуется источник питания для обнаружения перемещения .
При каждом включении инкрементного энкодера импульс отсчитывается от 0 , что означает, что положение не сохраняется, и до того, как энкодер начнет отсчет, необходимо получить сброс или исходное положение.
Типы инкрементных энкодеров
Инкрементальные поворотные энкодеры имеют разную конструкцию с разными технологиями, каждая из которых имеет свои преимущества и недостатки. Наиболее распространены следующие технологии:
Квадратурный инкрементный энкодер : Квадратурный энкодер, также известный как инкрементный угловой энкодер, измеряет скорость и направление вращающегося вала. Квадратурные энкодеры могут использовать различные типы датчиков, обычно используются оптические датчики и датчики Холла.
Оптический инкрементальный энкодер : Оптический инкрементный энкодер — один из наиболее широко используемых энкодеров. Эти энкодеры доступны в двух основных типах. Один тип имеет один детектор, а другой — два детектора, также известные как волоконно-оптические энкодеры.
Они экономичны и обеспечивают высокое разрешение. Однако при наличии риска загрязнения пылью, маслом и т. д. система оптического сканирования может работать со сбоями.
Магнитный инкрементальный энкодер : В этом энкодере импульсы генерируются магнитами. Эта технология также широко используется в промышленности, поскольку магнитные энкодеры менее подвержены риску загрязнения.
Как работает инкрементальный энкодер?
Инкрементальный энкодер — это устройство, которое генерирует электрические импульсы, если его вал вращается. После перемещения инкрементного энкодера поток двоичных импульсов пропорционален вращению генерируемого вала.
Разность фаз генерируемых импульсов показывает направление движения, а подсчет этих импульсов дает нам положение вала. Инкрементный поворотный энкодер состоит из вращающейся прорези черного цвета и фиксированной прорези между элементами передатчика и приемника.
Инкрементный поворотный энкодер состоит из вращающейся прорези черного цвета и фиксированной прорези между элементами передатчика и приемника.
При вращении вала энкодера свет, излучаемый передатчиком, проходит через эти зазоры и преобразуется приемником в токовый сигнал. Этот сигнал генерирует прямоугольную волну на выходе. Инкрементный энкодер имеет как минимум 1 выход A или обычно 2 выхода, называемых B и A.
Эти 2 сигнала сдвинуты по фазе друг относительно друга на 90°, что необходимо для обнаружения вращения энкодера. Вращение энкодера создает импульс А, а вращение вала двигателя генерирует импульс В.
Перемещение энкодера по часовой стрелке, импульс А и вращение вала по часовой стрелке, импульс В идет 90° впереди импульса A.
Кроме того, некоторые инкрементальные энкодеры имеют третий выходной канал, называемый Z, нулевой или опорный сигнал, который обеспечивает один импульс на оборот. Этот одиночный импульс используется для точного определения исходного положения.
| Инкрементальный | Абсолютный | ||||||||||||
| Функция | При отключении питания импульс отсчитывается от нуля и требует опорного положения | Положение сохраняется, даже если энкодер не включается, и измеряйте абсолютную позицию | |||||||||||
| Сложность | Проще | Более сложная | |||||||||||
| Выход | Speed, Displomation, Velocity и Districe | , | , | , | , | , | , | , | , | , | , | . Позиция | |
| Разрешение | До 10k PPR | До 22 бит | |||||||||||
| Связь по протоколу? | Нет | Да | |||||||||||
| Стоимость | Обычно ниже | Обычно выше |
Импульсов на оборот (PPR)
Импульсов на оборот или PPR представляет разрешение энкодера . Это количество высоких импульсов, которые энкодер будет иметь на любом из своих прямоугольных выходных сигналов A или B за один оборот, и оно показывает, скольким механическим градусам соответствует каждый импульс и период.
Инкрементальный энкодер выдает определенное количество импульсов за цикл. Если это число PPR велико, угол между каждым импульсом меньше.
Приложения
Инкрементальный энкодер разработан таким образом, чтобы быть универсальным и настраиваемым для использования в самых разных приложениях. Существует три широких категории приложений в зависимости от окружающей среды:
Heavy Duty : суровые условия окружающей среды с высокой вероятностью загрязнения и влажности, высокой температуры, ударов и вибрации, такие как целлюлоза, бумага, сталь и центры производства древесины.
Промышленная служба : В пищевой промышленности и производстве напитков, текстиле, общей автоматизации производства для общих условий эксплуатации, которые требуют стандартных рейтингов IP, умеренной устойчивости к ударам, вибрации и температуре.
Light Duty/Servo : В робототехнике, электронике и полупроводниках для управления средами с высокими требованиями к точности и температуре.
Одно из применений этих кодировщиков используется в производстве компьютерного оборудования. Например, в новой мыши с трекболом этот энкодер используется для определения положения мыши. Кодер в этой системе дает нам текущую позицию мыши, подсчитывая позиционные изменения.
- Авиация, оборона, железная дорога, медицина, разведка нефти, телекоммуникации
- Резка
- Домкраты для железнодорожных вагонов
- Вращение бутылок для нанесения этикеток
- Краны и строительные конструкции
- Точное управление положением токарного станка в автоматическом промышленном станке
- Точное измерение площади слоя древесины
- Определение скорости в лифтах
- Автоматические сборочные линии
- Упаковочные машины
Особенности и преимущества
- Подходит для подсчета простых импульсов или контроля частот, таких как скорость, направление и положение
- Простота интеграции и простота обслуживания16 90
- Высокое разрешение
- Простой и недорогой
- Магнитные измерения
- Компактный размер
- Применения в лифтовом режиме
- Прочный и гибкий
- Точное определение положения и скорости даже в сложных условиях
- Высокая помехозащищенность
Все еще любопытно? Щелкните по ссылкам ниже, чтобы узнать больше:
Угадайте доминирующий бренд на Ближнем Востоке для поворотного энкодера
Линейный энкодер (типы, области применения, преимущества)
Абсолютный энкодер (принцип работы, типы, области применения, преимущества)
An Полное руководство по энкодеру [принцип работы, объяснение всех типов, терминология, глоссарий, плюсы и минусы]
3 -й апрель 2022 Saeed Abd
2.
 Как работают инкрементные кодеры
Как работают инкрементные кодеры 2.1 Инкрементные кодеры измерения. принцип измерения энкодеров
При инкрементном принципе измерения градуировка состоит из периодической решетчатой структуры, производящей определенное количество синусоидальных сигналов при вращении вала энкодера. Эти синусоидальные сигналы могут быть преобразованы в другие форматы сигналов и использованы двумя различными способами. Либо для относительного позиционирования, либо, чаще, в качестве устройств обратной связи по скорости. Информацию об относительном местоположении можно получить путем подсчета отдельных приращений (шагов измерения) от некоторой исходной точки. Когда такой полуабсолютный эталон требуется для определения позиций, градуированные диски снабжены дополнительной дорожкой, на которой есть референтная метка.
Текст изображения: Диск с инкрементным градуированным кодом.
Скорость вращения вала энкодера можно определить путем расчета частоты синусоидальных сигналов. Инкрементальные энкодеры обычно используются в замкнутом контуре, контурах управления скоростью или в качестве устройств обратной связи по скорости.
Инкрементальные энкодеры обычно используются в замкнутом контуре, контурах управления скоростью или в качестве устройств обратной связи по скорости.
2.2 Разрешение, количество строк и частота импульсов
Разрешение, количество строк или частота импульсов — это просто разные обозначения количества периодов сигнала на канал и на один оборот инкрементального энкодера. Названия этих сигналов различаются у разных производителей энкодеров, но Leine Linde обычно использует S00, S9.0 и Sref. Сигналы S00 и S90 смещены друг от друга на 90°. S00 появляется на 90 градусов раньше S90, когда вал энкодера поворачивается по часовой стрелке. A, B и N или K1, K2 и K0 являются другими примерами номиналов, используемых в инкрементальных сигналах.
Текст изображения: выходные сигналы от инкрементного энкодера.
Для абсолютных энкодеров разрешение указывается как количество битов. Количество битов (или уникальных позиций на оборот) рассчитывается как 2n, где n равно количеству битов. Общее разрешение многооборотных энкодеров также включает количество различимых оборотов.
Общее разрешение многооборотных энкодеров также включает количество различимых оборотов.
2.3 Шаги измерения
Для получения более высокого разрешения от инкрементного энкодера можно контролировать оценку всех нарастающих и спадающих фронтов импульса. Обычно это выполняется последующей электроникой в виде четырехкратной, двойной или одинарной оценки. Шаг измерения – это определение максимального количества фронтов, полученных, когда последующая электроника поддерживает четырехкратную оценку, т. е. максимальное количество шагов измерения = 4 x количество строк. В приведенном ниже примере показано, к чему приводит оценка различных шагов измерения с точки зрения последующей электроники. В примере используется диск с числом строк 1024 стр/об.
Текст изображения: Шаги измерения.
2.4 Точность
Точность измерений с помощью энкодеров в основном определяется:
- Направленное отклонение радиальной решетки
- Эксцентриситет градуированного диска относительно подшипника
- Радиальное отклонение подшипника
- Ошибка механической установки
- Ошибка интерполяции при обработке сигнала во встроенной или внешней электронике интерполяции и оцифровки
Когда речь идет о точности инкрементальных энкодеров, обычно используется единица измерения el° (электрические градусы). Для одного сигнала период выходного сигнала эквивалентен 360 эл°. Один оборот энкодера равен 360 * N эл°, где N равно количеству штрихов на градуированном диске (ppr).
Для одного сигнала период выходного сигнала эквивалентен 360 эл°. Один оборот энкодера равен 360 * N эл°, где N равно количеству штрихов на градуированном диске (ppr).
Инкрементальные энкодеры от Leine & Linde имеют максимально допустимую точность ±50 el° (ошибка деления), что означает, что каждый фронт импульса сигнала энкодера имеет отклонение от его теоретического углового положения не более 50/N°. Например, для энкодера с 5000 имп/об ±50 el° соответствует максимальному механическому угловому отклонению 0,01° от теоретического положения для каждого из 20 000 фронтов импульса. (В этом случае максимальное разрешение энкодера составляет 360/(5000*4) или 0,018°).
Ошибка деления всегда синусоидальная. Одна половина оборота импульсов будет иметь более короткий период сигнала, тогда как период сигнала будет немного больше для другой половины оборота. Если инкрементный энкодер используется в контуре управления скоростью и имеет высокую ошибку деления, это может рассматриваться как пульсация скорости.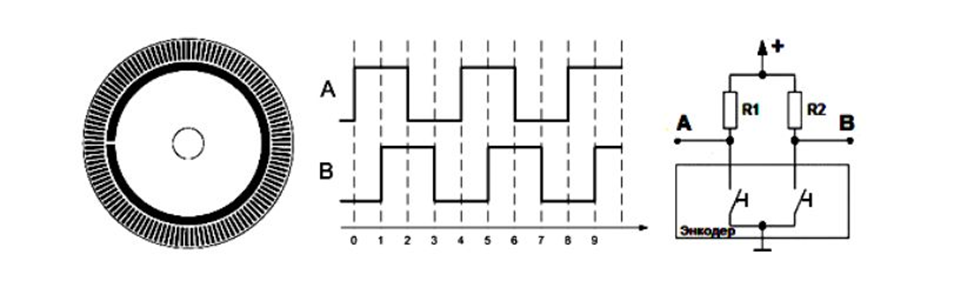
Текст изображения: Ошибка деления инкрементального энкодера.
Для абсолютных энкодеров термин точность относится к отклонению от оптимального теоретического положения абсолютных энкодеров. Единицей, используемой для точности абсолютного энкодера, является LSB, Least Significant Bit. На абсолютном энкодере с 13-битным однооборотным разрешением (2 13 = 8192 положения) точность составляет ±1LSB, что означает, что максимальное механическое угловое отклонение составляет:
360° / 8192 = ±0,04°
Таблицы точности и калибровки для каждого поставляемого энкодера могут быть предоставлены по запросу.
2.5 Разделение каналов в инкрементальных энкодерах
Спецификация точности также включает термин разделение каналов, которое представляет собой расстояние между соседними фронтами импульсов выходных сигналов S00 и S90. Во время окончательных настроек это настроено на 90 эл.° и должно лежать в пределах 90 ± 25 эл.° для стандартных энкодеров.
