Что такое шаговый двигатель. Как устроен шаговый электродвигатель. Какие бывают типы шаговых двигателей. Как работает шаговый двигатель. Где применяются шаговые двигатели. Каковы преимущества и недостатки шаговых моторов.
Что такое шаговый двигатель и как он устроен
Шаговый двигатель — это электромеханическое устройство, преобразующее электрические импульсы в дискретные механические перемещения. В отличие от обычных электродвигателей, вал шагового двигателя вращается не непрерывно, а пошагово.
Основные компоненты шагового двигателя:
- Статор с обмотками
- Ротор (может быть с постоянными магнитами или без них)
- Корпус
- Подшипники
- Вал
Принцип работы шагового двигателя основан на взаимодействии магнитных полей статора и ротора. При подаче импульсов тока на обмотки статора создается вращающееся магнитное поле, которое поворачивает ротор на определенный угол — шаг.
Типы шаговых двигателей
Существует несколько основных типов шаговых двигателей:

1. С переменным магнитным сопротивлением
В этом типе ротор выполнен из магнитомягкого материала в виде зубчатого колеса. Магниты отсутствуют. Принцип работы основан на стремлении ротора занять положение с минимальным магнитным сопротивлением.
2. С постоянными магнитами
Ротор содержит постоянные магниты. Взаимодействие магнитных полей ротора и статора обеспечивает вращение. Отличаются высоким крутящим моментом.
3. Гибридные
Сочетают особенности первых двух типов. Ротор содержит зубцы и постоянные магниты. Обеспечивают высокую точность позиционирования и крутящий момент.
Принцип работы шагового двигателя
Работа шагового двигателя основана на следующих принципах:
- При подаче импульса тока на одну из обмоток статора создается магнитное поле.
- Это поле взаимодействует с полем ротора (постоянных магнитов или зубцов).
- В результате ротор поворачивается, чтобы занять положение с минимальным магнитным сопротивлением.
- Угол поворота зависит от конструкции двигателя и способа управления.
- Последовательная подача импульсов на обмотки вызывает пошаговое вращение вала.
Величина шага может составлять от долей градуса до нескольких градусов, в зависимости от конструкции. Типичные значения — 1.8° и 0.9° на шаг.

Режимы управления шаговым двигателем
Существует несколько основных режимов управления шаговыми двигателями:
1. Полношаговый режим
В этом режиме на каждом шаге активны все обмотки двигателя. Обеспечивает максимальный крутящий момент, но меньшую плавность хода.
2. Полушаговый режим
Чередуются состояния с одной и двумя активными обмотками. Позволяет удвоить разрешение, но снижает крутящий момент.
3. Микрошаговый режим
Ток в обмотках изменяется плавно, что обеспечивает очень маленький шаг и плавное вращение. Снижает вибрации и шум двигателя.
Преимущества и недостатки шаговых двигателей
Каковы основные плюсы и минусы использования шаговых двигателей?
Преимущества:
- Высокая точность позиционирования без обратной связи
- Стабильность на низких скоростях
- Быстрый старт/остановка/реверс
- Высокая надежность благодаря отсутствию щеток
- Невысокая стоимость при массовом производстве
Недостатки:
- Возможность пропуска шагов при перегрузках
- Сложность работы на высоких скоростях
- Склонность к резонансным явлениям
- Относительно высокое энергопотребление
Применение шаговых двигателей
Где наиболее часто используются шаговые двигатели?
- Станки с ЧПУ (фрезерные, токарные, лазерные)
- 3D-принтеры и сканеры
- Робототехника
- Точные измерительные приборы
- Офисная техника (принтеры, сканеры)
- Автомобильная электроника
- Системы позиционирования в астрономии
Шаговые двигатели идеально подходят для задач, требующих точного позиционирования и контроля скорости вращения.
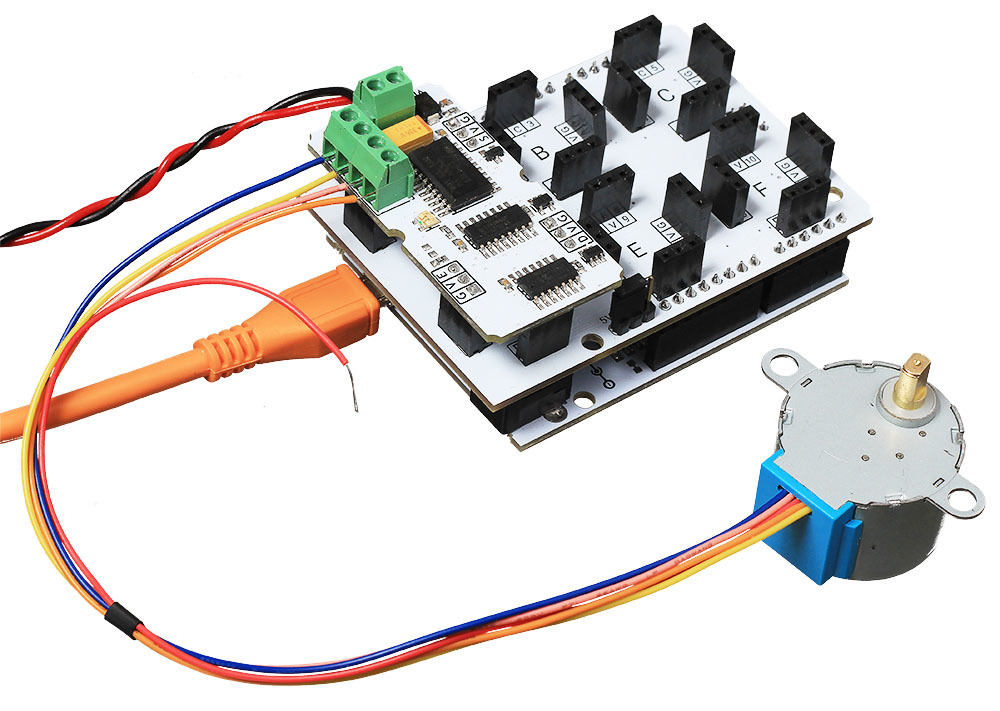
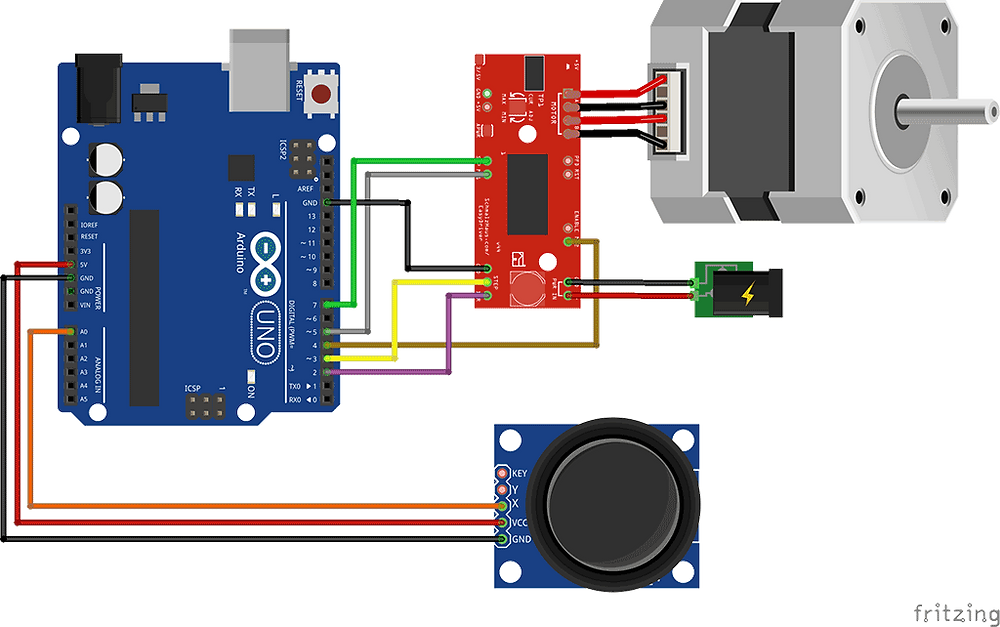
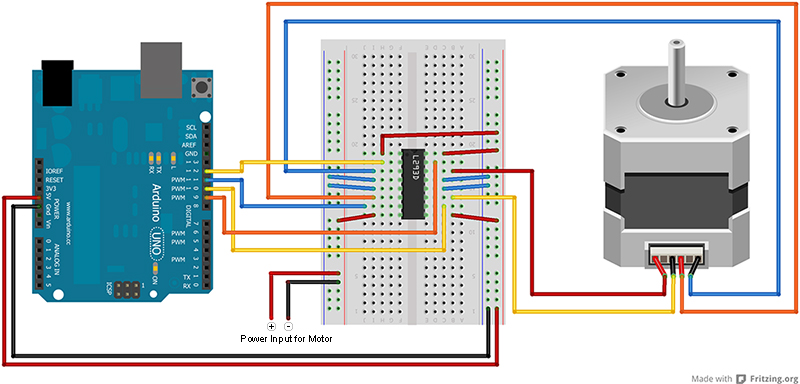
Подключение и управление шаговым двигателем
Для работы шагового двигателя необходимы следующие компоненты:
- Источник питания
- Контроллер (драйвер) шагового двигателя
- Микроконтроллер или компьютер для управления
Драйвер шагового двигателя преобразует управляющие сигналы низкого напряжения в импульсы тока, необходимые для работы двигателя. Он также позволяет реализовать различные режимы управления, включая микрошаговый режим.
Управление шаговым двигателем обычно осуществляется с помощью двух сигналов:
- STEP — каждый импульс вызывает поворот на один шаг
- DIR — определяет направление вращения
Для более сложных применений могут использоваться дополнительные сигналы управления режимами работы и микрошагового деления.

Как работают шаговые двигатели | РОБОТОША
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования.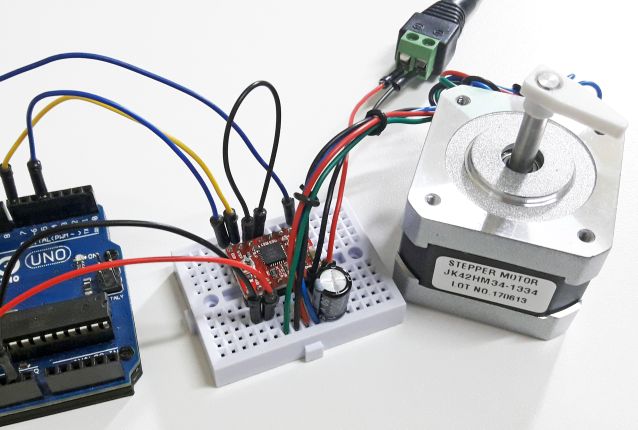 Например, этот мотор даст 8 шагов на оборот!
Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита.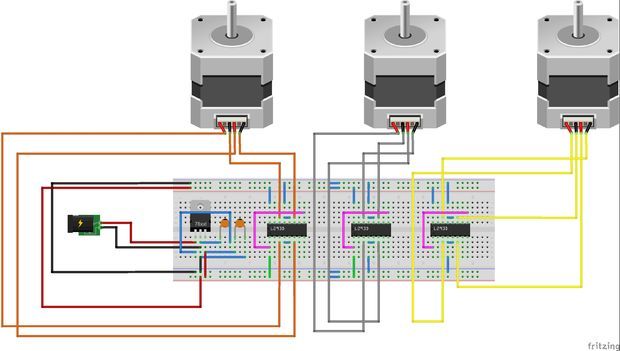 Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.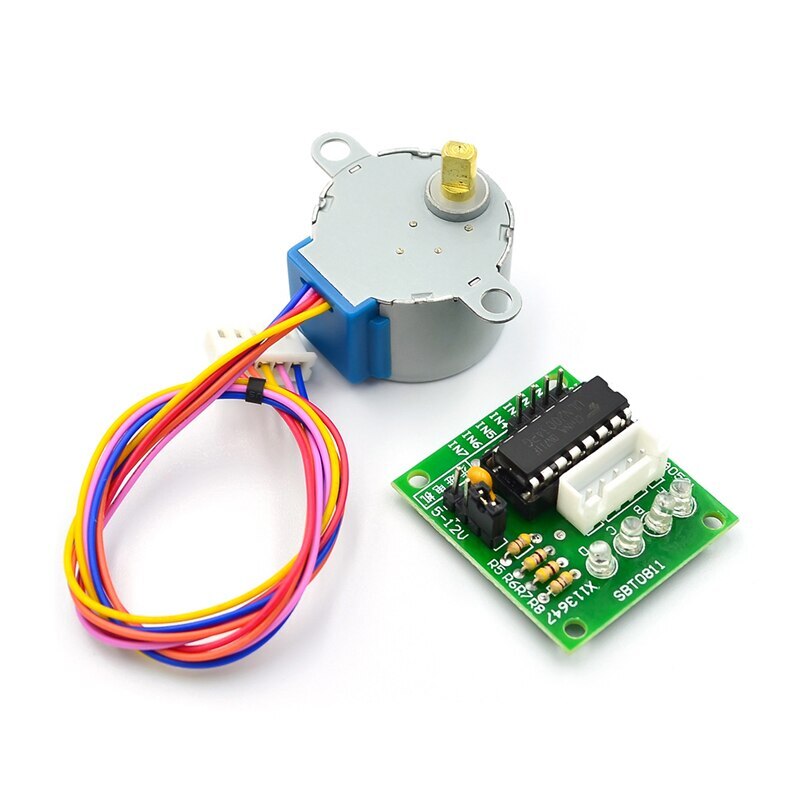
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления.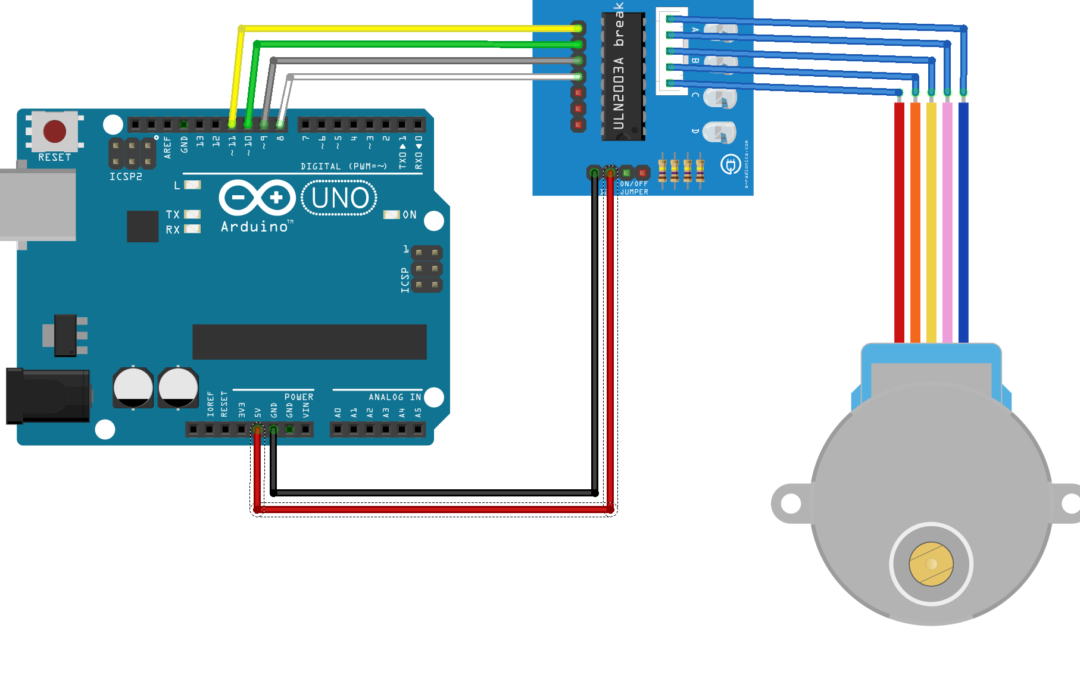 Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
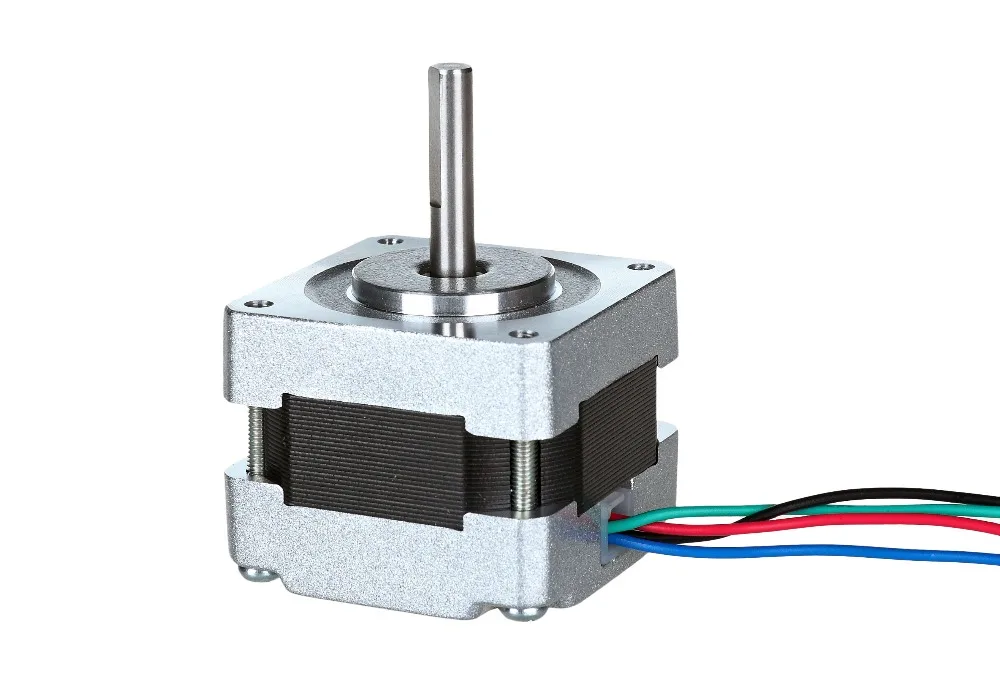
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.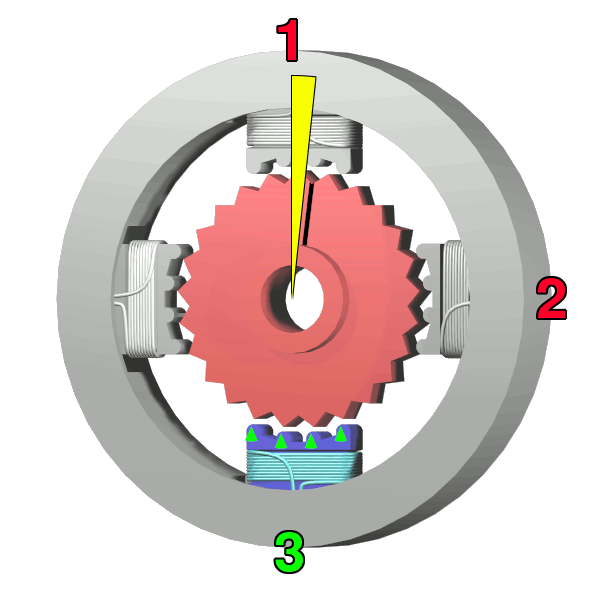
устройство, принцип работы, типы, схемы подключения
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота.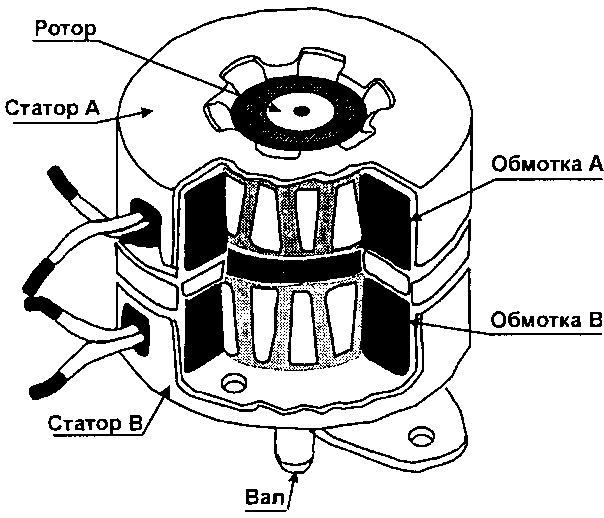 Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
Рис. 1. Принцип действия шагового двигателяНа рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
С постоянным магнитомГибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом.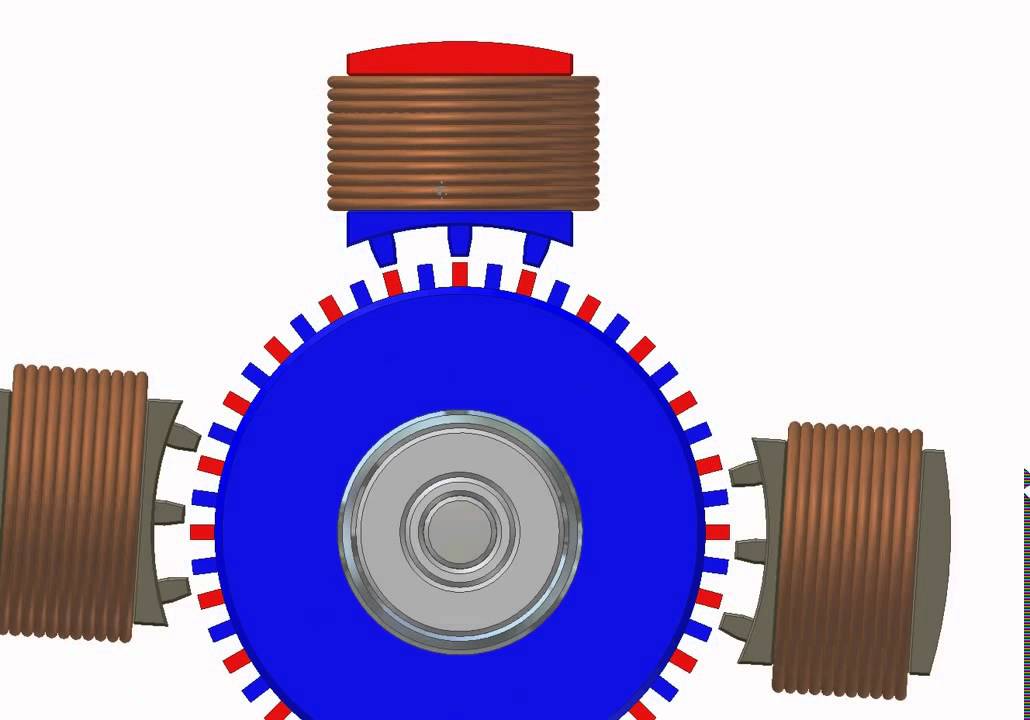 Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
Расположение пазов гибридникаИз-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
Униполярный ШДДля использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Схема а) с различными, б) с одним выводомБиполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата.
При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.

- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.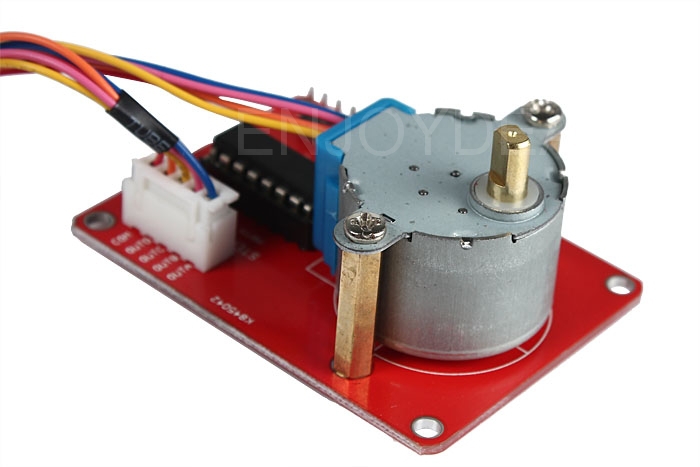
Полношаговый – в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Полношаговое управлениеПолушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
Полушаговое управлениеДля более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-мостаКак видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Популярные схемы управления ШД
Схема управления от контроллера с дифференциальным выходомЯвляется одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
Схема управления от контроллера с выходом типа «открытый коллектор»В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Полезное видео
Принцип работы шагового двигателя — ООО «СЗЭМО Электродвигатель»
Шаговые двигатели широко используются в бытовых приборах, транспортных средствах, фрезерных и шлифовальных станках и других производственных механизмах. Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов (это обеспечивается благодаря контроллеру). Главное его отличие от моторов других типов – отсутствие щеточного механизма. Шаговый двигатель оснащен блоком управления (приборной панелью), передатчиками и сигнализаторами.
Как работает шаговый электродвигатель
Зная принцип работы шагового двигателя, вы сможете самостоятельно установить его или произвести ремонт. Он функционирует следующим образом:
- После подачи напряжения на клеммы начинается непрерывное вращение специальных щеток. Входные импульсы устанавливают ведущий вал в положение, которое заранее определено.
- Под воздействием импульсов вал перемещается под фиксированным углом.
- Внешняя цепь управления, чаще всего представленная микроконтроллером, возбуждает электромагниты зубчатого типа. Один из них (тот, к которому приложена энергия) притягивает к себе зубья шестерни, вследствие чего вал движка делает поворот.
- Будучи выровнены по отношению к ведущему электромагниту, остальные магниты смещаются по направлению к следующей магнитной детали.
- Вращение шестеренки обеспечивается отключением первого электромагнита и включением следующего.
- Шестеренка выравнивается по отношению к предыдущему колесу, после чего весь процесс повторяется столько раз, сколько необходимо.
Данные вращения являются постоянным шагом. Для определения скорости мотора нужно подсчитать количество шагов, требуемых для его полного оборота. Точность работы обеспечивается благодаря микропроцессорным системам управления шаговых двигателей.
Виды шаговых двигателей
Существует несколько разных моделей шаговых двигателей. Если конструкция устройства предусматривает наличие постоянного магнита, принцип работы основан на притяжении или отталкивании статором и ротором электромагнитного мотора. В переменно-шаговом движке ротор изготавливается из железа. Минимально допустимое отталкивание в нем происходит при наименьшем зазоре, что обеспечивает притяжение точек ротора к полюсам магнитного статора. В механизмах гибридного типа оба вышеприведенных принципа сочетаются и дополняют друг друга. Из-за сложности конструкции и изготовления такие приборы стоят дороже, чем остальные модели.
Чаще всего в быту и на производстве применяются двухфазные шаговые двигатели. В зависимости от типа обмотки электромагнитных катушек они подразделяются на:
- униполярные;
- биполярные.

Механизмы первого типа оснащены одной обмоткой. Каждая фаза определяется центральным магнитным краном. При включении определенной секции обмотки обеспечивается нужное направление магнитного поля. Такая конструкция предусматривает работу магнитного полюса без дополнительного переключения, что обеспечивает предельно простую коммутацию цепи, равно как и направления тока. Для работы движка (с учетом фазного переключения) обычно достаточно трех проводов на фазу и шести для выходного сигнала. Микроконтроллер используется для активирования транзистора в нужной последовательности (она определяется программой).
Для подключения обмоток соединительные провода должны прикасаться к постоянным магнитам двигателя. При соединении клемм катушки вал проворачивается с трудом. Поскольку общий провод длиннее, чем провод, соединяющий катушки, сопротивление между торцами проводов и торцами катушек в два раза больше сопротивления между торцом катушки и общим проводом.
В механизмах второго типа есть только одна фазовая обмотка. Управляющая схема такого движка обычно сложнее, так как ток в обмотку поступает при помощи магнитного полюса переломным образом. Два провода на фазу не являются общими.
Управляющая схема такого движка обычно сложнее, так как ток в обмотку поступает при помощи магнитного полюса переломным образом. Два провода на фазу не являются общими.
Трехфазный шаговый двигатель устанавливается на фрезерных станках с ЧПУ, запускаемых с компьютера, и транспортных средствах, в которых используется дроссельная заслонка.
Подключение шагового двигателя
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам. В первом случае используется один центр-кран каждой обмотки и один конец провода. Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
В первом случае используется один центр-кран каждой обмотки и один конец провода. Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу. Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Благодаря высокой степени защиты шаговые двигатели успешно работают в тяжелых условиях.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой бесщеточный синхронный электродвигатель, который преобразует цифровые импульсы в механическое вращение вала. Его нормальное движение вала состоит из дискретных угловых движения практически одинаковой величины при управлении от последовательно переключаемого постоянного тока источник питания.
Шаговый двигатель представляет собой цифровое устройство ввода-вывода. Он особенно хорошо подходит для типа
приложение, в котором управляющие сигналы появляются в виде цифровых импульсов, а не аналоговых напряжений.
Один цифровой импульс на привод шагового двигателя или транслятор заставляет двигатель увеличивать одно точное значение.
угол движения. По мере увеличения частоты цифровых импульсов шаговое движение меняется на
непрерывное вращение.
Некоторые промышленные и научные приложения шаговых двигателей включают робототехнику, станки, машины для захвата и размещения, автоматические машины для резки и соединения проводов и даже устройства для точного контроля жидкости.
Как работает шаговый двигатель?
Каждый оборот шагового двигателя делится на дискретное количество шагов, во многих случаях 200 шагов, и для каждого шага двигателю должен посылаться отдельный импульс. Шаговый двигатель может делать только один шаг за раз, и каждый шаг имеет одинаковый размер.
Поскольку каждый импульс заставляет двигатель поворачиваться на точный угол, обычно 1,8°, положением двигателя можно управлять без какого-либо механизма обратной связи. По мере увеличения частоты цифровых импульсов шаговое движение превращается в непрерывное вращение со скоростью вращения, прямо пропорциональной частоте импульсов.
Шаговые двигатели ежедневно используются как в промышленности, так и в коммерческих целях благодаря их низкой стоимости, высокой надежности, высокому крутящему моменту на низких скоростях и простой прочной конструкции, способной работать практически в любых условиях.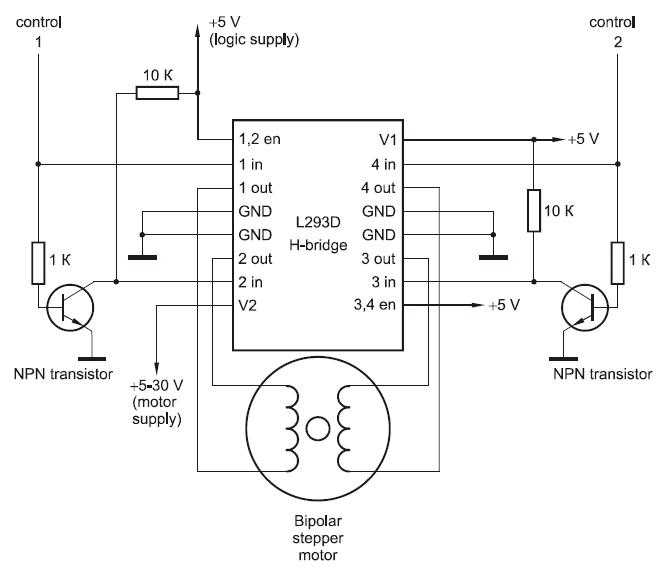
- Угол поворота двигателя пропорционален входному импульсу.
- Двигатель имеет полный крутящий момент в состоянии покоя (если обмотки находятся под напряжением).
- Точное позиционирование и повторяемость движения, так как хорошие шаговые двигатели имеют точность от 3 до 5% шага, и эта ошибка не накапливается от одного шага к другому.
- Отличный отклик на запуск/остановку/реверс.
- Очень надежен, так как в двигателе нет контактных щеток. Поэтому срок службы шагового двигателя просто зависит от срока службы подшипника.
- Реакция шаговых двигателей на цифровые входные импульсы обеспечивает управление без обратной связи, что делает управление двигателем более простым и менее затратным.
- Можно добиться синхронного вращения на очень низкой скорости с нагрузкой, которая непосредственно связана с валом.
- Может быть реализован широкий диапазон скоростей вращения, поскольку скорость пропорциональна частоте входных импульсов.
Выбор шагового двигателя и контроллера
Выбор шагового двигателя зависит от требований к крутящему моменту и скорости приложения. Используйте кривую крутящего момента двигателя (находится в технических характеристиках каждого привода), чтобы выбрать двигатель, который будет выполнять эту работу.
Каждый контроллер шагового двигателя в линейке Omegamation показывает кривые момент-скорость для двигателей, рекомендуемых для данного привода. Если ваши требования к крутящему моменту и скорости могут быть удовлетворены с помощью нескольких шаговых двигателей, выберите контроллер в зависимости от потребностей вашей системы движения (шаг/направление, автономное программирование, аналоговые входы, микрошаговый режим), а затем выберите один из рекомендуемых двигателей для этого контроллера. .
.
Список рекомендуемых двигателей основан на всесторонних испытаниях, проведенных производителем для обеспечения оптимальной работы комбинации шагового двигателя и контроллера.
Шаг и направление
Эти приводы принимают шаговые импульсы и сигналы направления/разрешения от контроллера шагового двигателя, такого как ПЛК или ПК. Каждый импульс шага заставляет двигатель поворачиваться на точный угол, а частота импульсов определяет скорость вращения. Сигнал направления определяет направление вращения (по часовой стрелке или против часовой стрелки), а сигнал разрешения включает или выключает двигатель.
Осциллятор
Приводы с шаговым двигателем со встроенным цифровым генератором принимают аналоговый вход или джойстик для управления скоростью. Эти системы обычно используются в приложениях, требующих непрерывного движения, а не управления положением, таких как миксеры, блендеры и диспенсеры.
Эти системы обычно используются в приложениях, требующих непрерывного движения, а не управления положением, таких как миксеры, блендеры и диспенсеры.
Автономный Программируемый
Все эти контроллеры шаговых двигателей могут быть запрограммированы для автономной работы; программа управления движением создается с помощью простого интерфейса программного обеспечения высокого уровня с функцией перетаскивания (поставляется бесплатно), а затем загружается и выполняется при включении питания. Программа управления движением обычно ожидает ввода, такого как замыкание переключателя или нажатие кнопки, прежде чем выполнять запрограммированное движение.
Высокопроизводительные шаговые двигатели
Эти цифровые приводы с шаговыми двигателями предлагают расширенные функции, такие как самодиагностика, защита от сбоев, автонастройка, сглаживание пульсаций крутящего момента, сглаживание командных сигналов и антирезонансные алгоритмы. Некоторые приводы программируются автономно, в то время как другие предлагают шаг/направление и аналоговые входы. Высокопроизводительные приводы обеспечат наилучшую возможную производительность вашей системы управления перемещением.
Некоторые приводы программируются автономно, в то время как другие предлагают шаг/направление и аналоговые входы. Высокопроизводительные приводы обеспечат наилучшую возможную производительность вашей системы управления перемещением.
- Активный ротор: шаговый двигатель с постоянными магнитами (PM)
- Реактивный ротор: шаговый двигатель с переменным сопротивлением (VR)
- Комбинация VR и PM: гибридный шаговый двигатель (HY)
Это бесщеточные электрические машины, вращающиеся под фиксированным углом. увеличивается при подключении к последовательно коммутируемому постоянному току. При использовании переменного тока вращение существенно непрерывный.
Шаговый двигатель с постоянными магнитами
Этот тип шагового двигателя имеет ротор с постоянными магнитами. статор
может быть таким же, как у обычного 2- или 3-фазного индукционного
двигатель или конструкция, аналогичная штампованному двигателю. Последнее является
Самый популярный тип шагового двигателя.
статор
может быть таким же, как у обычного 2- или 3-фазного индукционного
двигатель или конструкция, аналогичная штампованному двигателю. Последнее является
Самый популярный тип шагового двигателя.
a.) Обычный тип с постоянными магнитами. На рис. 1 показана схема обычного шаговый двигатель с ротором на постоянных магнитах. 2-фазная обмотка иллюстрируется. На рис. 1а показана фаза А. под напряжением с положительной клеммой «А». Поле находится под углом 0°. С катушкой, намотанной, как показано, северный полюс ротор также находится в положении 0°.
Вал совершает один оборот за каждый полный оборот электромагнитного поля в этом двигателе. На рис. 2 показан тот же шаговый двигатель с обеими обмотками под напряжением. Важный разница здесь в том, что результирующее электромагнитное поле находится между два полюса. На рис. 2 поле сместилось на 45° от поле на рис. 1.
Как и в схеме однофазного включения, вал завершает один
оборот за каждый полный оборот электромагнитного поля. Должно быть очевидно, что этот двигатель может работать на полшага; т. е. шаг в малом
ступенчатые приращения. Это возможно за счет объединения питания
показанный на рисунке 1 с показанным на рисунке 2. На рисунке 3 показаны схемы
Шаговый двигатель с ПМ с полушаговым движением ротора.
Должно быть очевидно, что этот двигатель может работать на полшага; т. е. шаг в малом
ступенчатые приращения. Это возможно за счет объединения питания
показанный на рисунке 1 с показанным на рисунке 2. На рисунке 3 показаны схемы
Шаговый двигатель с ПМ с полушаговым движением ротора.
Как и на предыдущих схемах, ротор и вал движутся через под тем же углом, что и поле. Обратите внимание, что каждый шаг приводил к повороту на 45°. вместо 90° на предыдущей диаграмме. Шаговый двигатель с постоянными магнитами можно намотать бифилярно. обмотки, чтобы избежать необходимости менять полярность обмотка. На рис. 4 показана бифилярная обмотка при В Таблице IV показана последовательность подачи питания.
Бифилярные обмотки проще коммутировать с помощью транзисторного контроллера.
Требуется меньше переключающих транзисторов.
b.) Штампованный или может штабелироваться шаговый двигатель с постоянными магнитами.
Наиболее популярным типом шагового двигателя с постоянными магнитами является так
называется штампованным типом, когтевым зубом, листовым металлом, жестяной банкой или просто
недорогой мотор.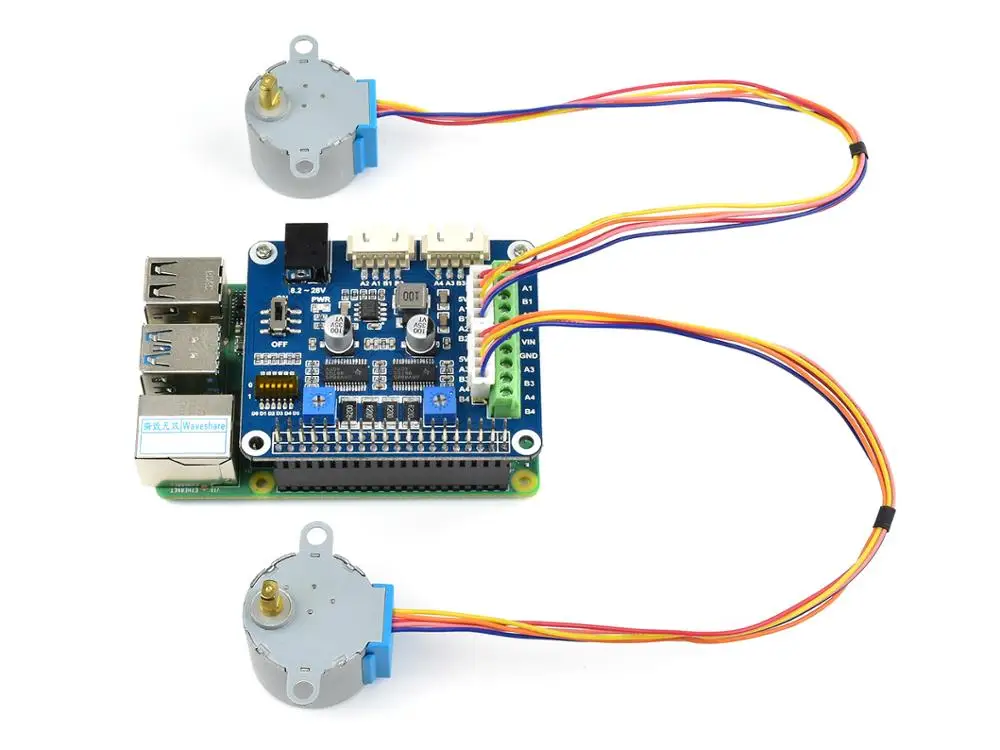 Этот мотор трудно проиллюстрировать ясно
из-за того, как он устроен.
Этот мотор трудно проиллюстрировать ясно
из-за того, как он устроен.
Этот двигатель имеет пару катушек, окружающих ротор с постоянными магнитами. Катушки заключены в корпус из мягкого железа с зубьями на внутри взаимодействует с ротором. Каждый корпус катушки имеет одинаковый количество зубьев равно количеству полюсов ротора. Корпуса радиально смещены друг относительно друга на половину шага зубьев.
Шаговый двигатель с переменным сопротивлением
Этот тип шагового двигателя имеет электромагнитный статор с ротор из магнитомягкого железа с зубьями и пазами, похожими на ротор индукторного генератора. В то время как двигатели с постоянными магнитами в основном 2-фазные машины, двигатели VR требуют как минимум 3 фазы. Большинство VR шаговые двигатели имеют 3 или 4 фазы, хотя 5-фазные двигатели VR доступный.
В шаговом двигателе VR поле движется с другой скоростью, чем ротор.
Обратите внимание, что катушка фазы А имеет два
южные полюса и отсутствие северных полюсов для пути возврата потока.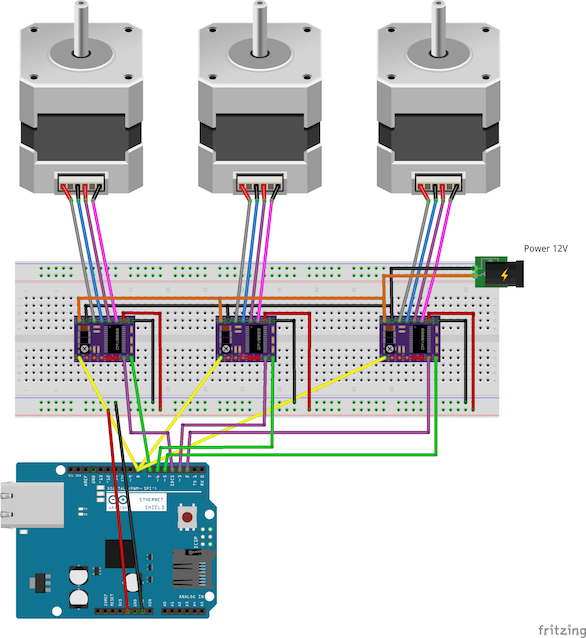 Вы можете отдохнуть
заверил, что будет. Поток вернется по пути
наименьшего нежелания, а именно через пары полюсов, которые являются ближайшими
на два зуба ротора. Это зависит от положения ротора. Поток вызывает
напряжение в катушках, намотанных на полюс. Это индуцирует ток в
обмотка, замедляющая ротор. Величина тока определяется
напряжение на катушке. Катушка с диодной фиксацией будет иметь больше
ток, чем обмотка с резисторным диодом или стабилитроном.
Вы можете отдохнуть
заверил, что будет. Поток вернется по пути
наименьшего нежелания, а именно через пары полюсов, которые являются ближайшими
на два зуба ротора. Это зависит от положения ротора. Поток вызывает
напряжение в катушках, намотанных на полюс. Это индуцирует ток в
обмотка, замедляющая ротор. Величина тока определяется
напряжение на катушке. Катушка с диодной фиксацией будет иметь больше
ток, чем обмотка с резисторным диодом или стабилитроном.
Гибридный шаговый двигатель
Этот тип двигателя часто называют двигателем с постоянным магнитом. мотор. Он использует комбинацию постоянного магнита и переменного Структура нежелания. Его конструкция аналогична конструкции Индукционный двигатель.
Ротор имеет два
наконечники (хомуты) с выступающими полюсами, расположенными на равном расстоянии друг от друга, но радиально
со смещением друг от друга на половину шага зубьев. Круглый перманент
магнит разделяет их. Ярма имеют практически равномерный поток
противоположной полярности. Статор изготовлен из многослойной стали.
Некоторые двигатели имеют 4 катушки.
в две группы по 2 катушки последовательно. Одна пара катушек называется фазой А и
другая Фаза B.
Ярма имеют практически равномерный поток
противоположной полярности. Статор изготовлен из многослойной стали.
Некоторые двигатели имеют 4 катушки.
в две группы по 2 катушки последовательно. Одна пара катушек называется фазой А и
другая Фаза B.
Количество полных шагов за оборот может быть определено из по следующей формуле:
SPR = NR x Ø
Где: SPR = количество шагов на оборот
NR = общее количество зубьев ротора (всего для оба ярма)
Ø = количество фаз двигателя
или: NR = SPR/Ø
Они имеют многозубчатые полюса статора и ротор с постоянными магнитами. Стандартные гибридные двигатели имеют 200 зубьев ротора и угол поворота 1,8º. Поскольку они демонстрируют высокий статический и динамический крутящий момент и работают с очень высокой частотой шагов, гибридные шаговые двигатели используются в самых разных коммерческих приложениях, включая компьютерные дисководы, принтеры/плоттеры и проигрыватели компакт-дисков.
Пошаговые режимы
«Шаговые режимы» шагового двигателя включают полный, половинный и микрошаг.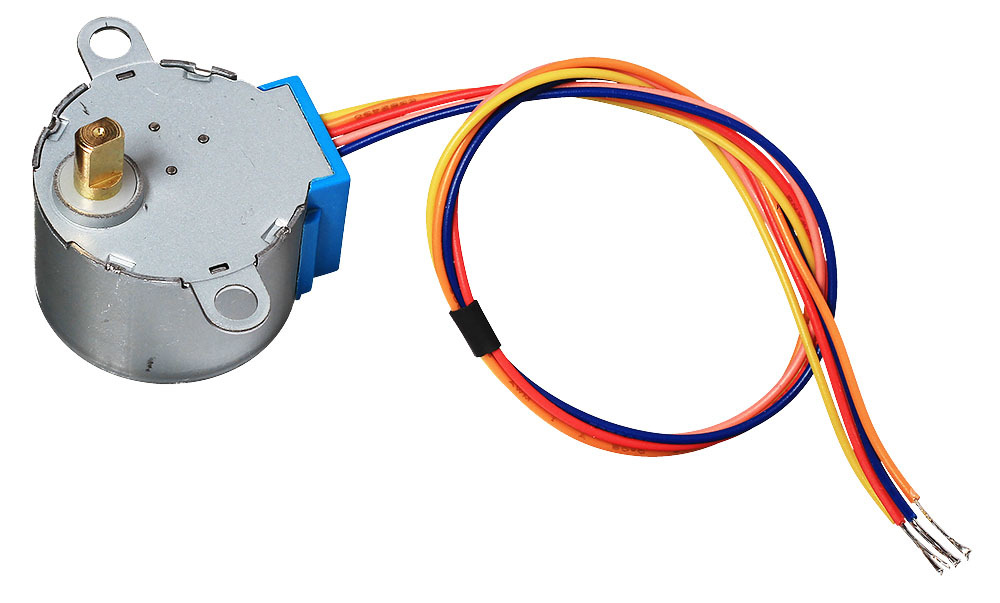 Тип выхода шагового режима любого шагового двигателя зависит от конструкции контроллера. Omegamation™ предлагает приводы с шаговыми двигателями с выбираемыми переключателем полными и полушаговыми режимами, а также микрошаговые приводы с разрешающей способностью, выбираемой переключателем или программно.
Тип выхода шагового режима любого шагового двигателя зависит от конструкции контроллера. Omegamation™ предлагает приводы с шаговыми двигателями с выбираемыми переключателем полными и полушаговыми режимами, а также микрошаговые приводы с разрешающей способностью, выбираемой переключателем или программно.
Полный шаг
Стандартные гибридные шаговые двигатели имеют 200 зубьев ротора или 200 полных шагов на один оборот вала двигателя. Разделение 200 шагов на 360° вращения равно 1,8° полного угла шага. Обычно полношаговый режим достигается за счет подачи питания на обе обмотки с попеременным изменением направления тока. По сути, один цифровой импульс от драйвера эквивалентен одному шагу.
Полушаг
Половина шага просто означает, что шаговый двигатель вращается со скоростью 400 шагов за оборот. В этом режиме на одну обмотку подается питание, а затем поочередно подается питание на две обмотки, в результате чего ротор вращается на половине расстояния, или 0,9 °.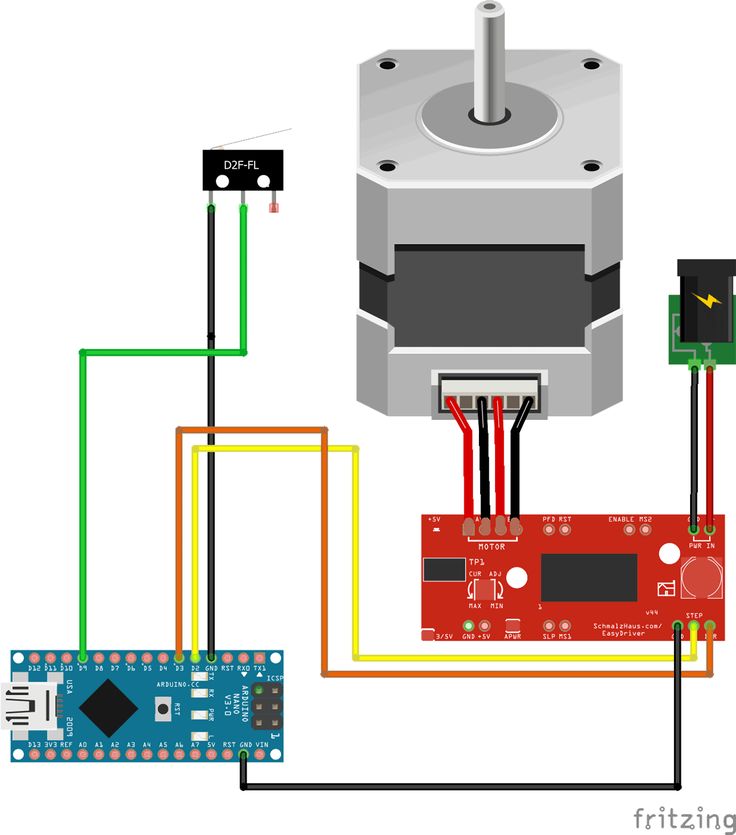 Хотя он обеспечивает примерно на 30% меньший крутящий момент, полушаговый режим обеспечивает более плавное движение, чем полношаговый режим.
Хотя он обеспечивает примерно на 30% меньший крутящий момент, полушаговый режим обеспечивает более плавное движение, чем полношаговый режим.
Микросте
Микрошаг — это относительно новая технология шагового двигателя, которая регулирует ток в обмотке двигателя до такой степени, что количество позиций между полюсами далее подразделяется.
Микрошаговые приводы Omegamation способны делить полный шаг (1,8°) на 256 микрошагов, что дает 51 200 шагов на оборот (0,007°/шаг). Микрошаг обычно используется в приложениях, требующих точного позиционирования и более плавного движения в широком диапазоне скоростей. Как и полушаговый режим, микрошаг обеспечивает примерно на 30% меньший крутящий момент, чем полношаговый режим.
Линейный шаговый двигатель Управление
Вращательное движение шагового двигателя можно преобразовать в поступательное с помощью системы привода с ходовым винтом и червячной передачей (см. рис. B). Ход или шаг ходового винта — это линейное расстояние, пройденное за один оборот винта. Если ход равен одному дюйму на оборот, а на один оборот приходится 200 полных шагов, то разрешение системы ходового винта составляет 0,005 дюйма на шаг. Еще более высокое разрешение возможно при использовании системы шагового двигателя/привода в микрошаговом режиме.
рис. B). Ход или шаг ходового винта — это линейное расстояние, пройденное за один оборот винта. Если ход равен одному дюйму на оборот, а на один оборот приходится 200 полных шагов, то разрешение системы ходового винта составляет 0,005 дюйма на шаг. Еще более высокое разрешение возможно при использовании системы шагового двигателя/привода в микрошаговом режиме.
Серия против параллельного соединения
Существует два способа подключения шагового двигателя последовательно или параллельно. Последовательное соединение обеспечивает высокую индуктивность и, следовательно, больший крутящий момент на низких скоростях. Параллельное соединение снизит индуктивность, что приведет к увеличению крутящего момента на более высоких скоростях.
Контроллер шагового двигателя Обзор технологии
Драйвер получает сигналы шага и направления от индексатора или контроллера шагового двигателя и преобразует их в электрические сигналы для запуска шагового двигателя.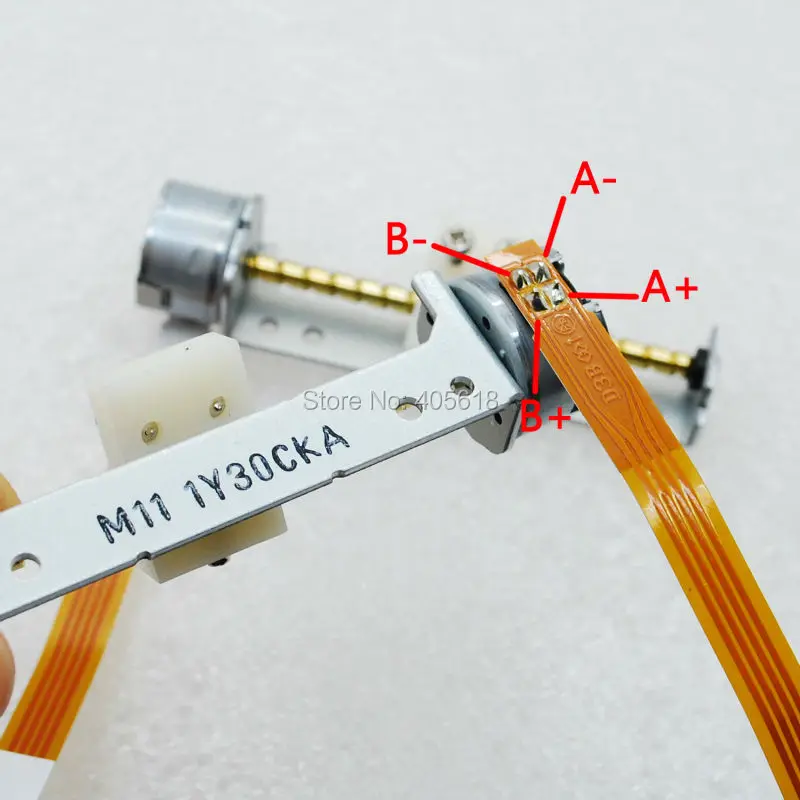 Для каждого шага вала двигателя требуется один импульс.
Для каждого шага вала двигателя требуется один импульс.
В полношаговом режиме со стандартным 200-шаговым двигателем для совершения одного оборота требуется 200 импульсов шага. Скорость вращения прямо пропорциональна частоте импульсов. Некоторые системы управления имеют встроенный генератор, который позволяет использовать внешний аналоговый сигнал или джойстик для установки скорости двигателя.
Характеристики скорости и крутящего момента шагового двигателя основаны на протекании тока от драйвера к обмотке двигателя. Фактор, который препятствует потоку или ограничивает время, необходимое току для возбуждения обмотки, известен как индуктивность. Эффекты индуктивности, большинство типов цепей управления рассчитаны на подачу большего напряжения, чем номинальное напряжение двигателя.
Чем выше выходное напряжение контроллера, тем выше уровень отношения крутящего момента к скорости. Как правило, выходное напряжение драйвера (напряжение шины) должно быть в 5-20 раз выше, чем номинальное напряжение двигателя. Чтобы защитить двигатель от повреждения, ток привода шагового двигателя должен быть ограничен номинальным током шагового двигателя.
Чтобы защитить двигатель от повреждения, ток привода шагового двигателя должен быть ограничен номинальным током шагового двигателя.
Контроллер шагового двигателя Обзор
Индексатор, или контроллер шагового двигателя, обеспечивает шаг и направление для драйвера. Для большинства приложений требуется, чтобы индексатор также управлял другими функциями управления, включая ускорение, замедление, количество шагов в секунду и расстояние. Индексатор также может взаимодействовать со многими другими внешними сигналами и управлять ими.
Связь с системой управления осуществляется через последовательный порт RS-232 и, в некоторых случаях, через порт RS485. В любом случае контроллер шагового двигателя способен получать высокоуровневые команды от главного компьютера и генерировать необходимые импульсы шага и направления для драйвера.
Контроллер включает вспомогательный ввод/вывод для контроля входов от внешних источников, таких как переключатель «Пуск», «Толчок», «Домой» или концевой выключатель. Он также может инициировать другие функции машины через выходные контакты ввода-вывода.
Он также может инициировать другие функции машины через выходные контакты ввода-вывода.
Автономная работа
В автономном режиме контроллер может работать независимо от главного компьютера. После загрузки в энергонезависимую память программы движения можно запускать с различных типов интерфейсов оператора, таких как клавиатура или сенсорный экран, или с переключателя через вспомогательные входы/выходы.
Автономная система управления шаговым двигателем часто комплектуется драйвером и источником питания, а также опциональной обратной связью энкодера для приложений с «замкнутым контуром», требующих обнаружения остановки двигателя и точной компенсации положения двигателя.
Многоосевое управление
Многие приложения управления движением имеют более одного шагового двигателя для управления. В таких случаях доступен многоосевой контроллер шагового двигателя.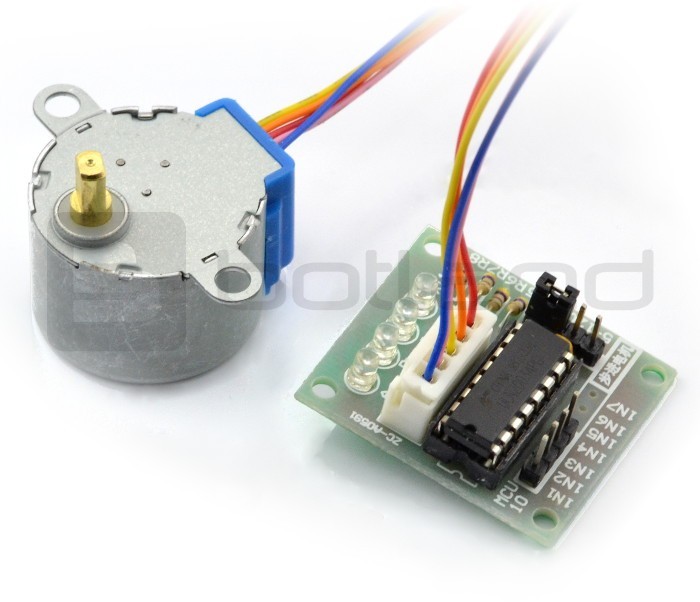 К сетевому концентратору HUB 444, например, может быть подключено до четырех шаговых приводов, причем каждый привод подключен к отдельному шаговому двигателю. Сетевой концентратор обеспечивает скоординированное движение для приложений, требующих высокой степени синхронизации, таких как круговая или линейная интерполяция.
К сетевому концентратору HUB 444, например, может быть подключено до четырех шаговых приводов, причем каждый привод подключен к отдельному шаговому двигателю. Сетевой концентратор обеспечивает скоординированное движение для приложений, требующих высокой степени синхронизации, таких как круговая или линейная интерполяция.
Двигатели | Сопутствующие товары
Подробнее ДвигателиКак работает шаговый двигатель? – Интеллектуальные решения для дома
Шаговый двигатель — это бесщеточный двигатель постоянного тока , который преобразует электрические импульсы в механическое движение. Каждый импульс представляет собой поворот РОТОРА (подвижной части двигателя) на небольшой угол ( шаг ). Например, если степпер имеет 200 шагов на оборот, то после подачи 50 импульсов он сделает четверть оборота. Частота и последовательность влияют на направление вращения и его скорость.
Введение
Шаговые двигатели часто используются в устройствах, требующих высокой точности. Вы можете найти их в фрезерных станках с ЧПУ, 3D-принтерах, роботах на фабриках, сканерах или CD/DVD-приводах (если вы достаточно взрослый, чтобы помнить это 🙂). Степперы — это действительно благодарные и приятные устройства, которые обязательно найдут место во многих ваших проектах. Их также очень легко контролировать, как я постараюсь показать вам в этой статье.
Вы можете найти их в фрезерных станках с ЧПУ, 3D-принтерах, роботах на фабриках, сканерах или CD/DVD-приводах (если вы достаточно взрослый, чтобы помнить это 🙂). Степперы — это действительно благодарные и приятные устройства, которые обязательно найдут место во многих ваших проектах. Их также очень легко контролировать, как я постараюсь показать вам в этой статье.
Что такое шаговый двигатель?
Шаговый двигатель — это бесщеточный двигатель постоянного тока. Как я упоминал ранее, он питается от электрических импульсов, которые преобразуются во вращательное движение. Вращение не плавное, как у классических двигателей постоянного тока. Полный поворот на 360 градусов состоит из определенного (в зависимости от конструкции) количества шагов. Это позволяет валу вращаться точно без какой-либо обратной связи. Так что энкодер не нужен.
В мире хобби наиболее популярны шаговые двигатели с 200 шагами на 360°. Это означает, что вал (ротор) будет поворачиваться на 1,8° каждый раз, когда мы подаем импульс (360° / 200 = 1,8°).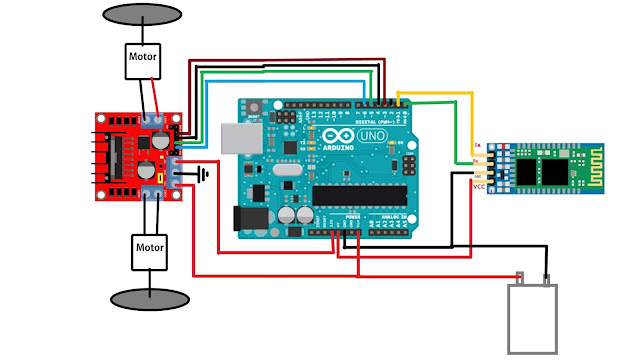
Направление вращения и его скорость в зависимости от последовательности и частоты импульсов.
Как устроен шаговый двигатель?
Шаговый двигатель, как и классический двигатель постоянного тока, состоит из РОТОРА и СТАТОРА . Статор является неподвижной частью, а ротор, установленный на двух подшипниках, вращается с помощью магнитного поля. Статор – из стали или другого металла, представляет собой каркас для набора электромагнитов, которые представляют собой катушки, установленные в определенных местах вокруг ротора. Когда ток течет по катушкам, вокруг них создается магнитное поле. Отдельные магнитные поля имеют направление и интенсивность в зависимости от интенсивности и направления тока, протекающего через данную катушку.
Типы шаговых двигателей
Шаговые двигатели можно разделить по конструкции статора и ротора, которая влияет на преобразование импульсов в движение. И из-за способа соединения катушек.
Я опишу эти два фактора отдельно, так как они совершенно не зависят друг от друга. Любой тип соединения может использоваться с любым типом двигателя.
Любой тип соединения может использоваться с любым типом двигателя.
В зависимости от конструкции различают:
- Шаговый двигатель с переменным сопротивлением
- Шаговый двигатель с постоянными магнитами
- Гибридный шаговый двигатель
По способу намотки мы различаем:
- Униполярный шаговый двигатель
- Биполярный шаговый двигатель
Как работает шаговый двигатель?
Каждый тип работает немного по-разному, поэтому я опишу их отдельно. Пуск с двигателем с переменным сопротивлением.
Шаговый двигатель с переменным сопротивлением
Двигатели этого типа не имеют хороших параметров и были вытеснены из отрасли шаговыми двигателями других типов. Расскажу о них в ознакомительных целях. И чтобы помочь вам понять общий принцип работы.
ПОЛНЫЙ ШАГ
Сопротивление также известно как магнитное сопротивление. Если мы поместим проводник в магнитное поле электромагнита, он будет притягиваться. Чем ближе он подходит, тем меньше будет сопротивление.
Чем ближе он подходит, тем меньше будет сопротивление.
На анимации показан пример шагового двигателя с переменным сопротивлением и четырьмя катушками. Они намотаны попарно и на противоположных сторонах статора. Это дает нам восемь полюсов. Ротор сделан из некоторого проводника, и количество плеч отличается от количества катушек. Поскольку направление полюса в данном случае не имеет значения, я решил его не отмечать.
Как видите, при подаче питания на соответствующую пару катушек ближайшие плечи ротора притягиваются больше всего. Таким образом, будет сделан один шаг. В случае с этим шагом это будет:
6 Руки * 4 Катушки = 24 Шаги
360 ° / 24 Шаги = 15 °
9004 15 15 15 ° IS IS IS IS IS IS IS IS IS IS IS IS IS IS IS . ПОЛНЫЙ ШАГ для данного шагового двигателя. Звучит не очень впечатляюще, я знаю.
ПОЛНЫЙ ШАГ для данного шагового двигателя. Звучит не очень впечатляюще, я знаю. ПОЛУШАГ
К счастью, увеличить разрешение можно очень легко. Чтобы удвоить количество шагов, мы будем использовать ПОЛУШАГ вместо ПОЛНЫЙ ШАГ . Звучит интуитивно, не так ли? 🙂
Для этого нужно изменить последовательность включения катушек. В предыдущем случае мы использовали только одну пару за раз. На этот раз мы будем использовать две соседние пары, чтобы сделать промежуточный шаг. Теперь у нас есть 8 комбинаций (а не 4) активных катушек. Это означает, что мы удвоили разрешение до 9.0045 48 шагов и 7,5° для одного шага.
Якобы картинка говорит больше, чем миллион слов, поэтому я думаю, что простая анимация объяснит это еще лучше.
МИКРОШАГ
Но это еще не конец! Мы можем увеличить разрешение еще больше. Для этого нам нужно иметь возможность регулировать ток, протекающий через катушки. Чтобы его можно было запитать, например, вдвое меньшим током. Благодаря этому мы удваиваем количество возможных состояний по сравнению с ПОЛУШАГ метод. Снова анимация 🙂
Чтобы его можно было запитать, например, вдвое меньшим током. Благодаря этому мы удваиваем количество возможных состояний по сравнению с ПОЛУШАГ метод. Снова анимация 🙂
Теперь у нас есть 96 шагов , и 3.25° на один шаг.
Таким образом, мы можем увеличивать разрешение все больше и больше. К сожалению, кроме очевидных достоинств, у него есть и большие недостатки. Чем больше количество микрошагов, тем чаще происходит переключение катушек, следовательно, меньше крутящий момент.
Описанные выше методы управления (ПОЛНЫЙ, ПОЛОВИННЫЙ и МИКРОШАГ) основаны на шаговом двигателе с переменным сопротивлением, поскольку он самый простой. Тем не менее, он будет работать таким же образом для любого последующего типа. Следовательно, для постоянный магнит и гибридные шаговые двигатели , я буду описывать только метод FULL STEP .
Шаговый двигатель с постоянными магнитами
Шаговый двигатель с постоянными магнитами работает за счет взаимодействия полюсов магнитов. Не так, как в предыдущем случае – столб и проводник. Каждый из магнитов имеет два полюса:
Не так, как в предыдущем случае – столб и проводник. Каждый из магнитов имеет два полюса:
С – Север
Ю – Юг
Разные полюса (Ю – С) притягиваются, а одинаковые (С – Ю и Н – Н) отталкиваются друг друга. В результате степперы этого типа имеют гораздо больший крутящий момент.
В отличие от шагового двигателя с переменным сопротивлением, ротор с постоянным магнитом не имеет зубцов. Он построен как бы из нескольких магнитов, попеременно и радиально намагниченных. От их количества зависит разрешение мотора. Однако чем больше этих магнитов, тем они меньше, поэтому меньше взаимодействуют с электромагнитами в статоре. В результате двигатель имеет меньший крутящий момент.
В следующем простом примере используется ротор с шестью магнитными полюсами. С двумя полюсами электромагнитов это дает 12 ПОЛНЫХ ШАГОВ за оборот. В реальном мире двигатели этого типа имеют 24 или даже 48 ступеней.
Гибридный шаговый двигатель
Гибридные шаговые двигатели в настоящее время являются наиболее популярным типом, особенно в промышленности. Они сочетают в себе преимущества двигателей с постоянными магнитами и двигателей с переменным сопротивлением. Благодаря этому у них лучшие параметры, такие как крутящий момент и разрешение. Разрешение типичного гибридного степпера составляет от 0,9° до 3,6°, что дает 100-400 ПОЛНЫХ ШАГОВ за оборот (и давайте не будем забывать, что мы также можем применить МИКРОШАГИ тоже).
Ротор изготовлен из постоянных магнитов, однако, в отличие от описанного выше двигателя, магниты размещены аксиально, а не радиально. Кроме того, как вы можете видеть на картинке, ротор разделен на два (иногда четыре) кольца. У каждого из них есть маленькие зубы. Чем их больше, тем больше разрешение.
Зубья на обоих концах (кольцах) ротора сдвинуты на ползуба. У статора тоже есть зубья, но они на одной линии. Благодаря этому, когда зубья одного кольца имеют разные полюса и притягиваются друг к другу, то зубья второго кольца (имеющего тот же полюс, что и катушка) будут точно между ними. Это улучшает характеристики двигателя и увеличивает его крутящий момент.
Это улучшает характеристики двигателя и увеличивает его крутящий момент.
Статор такого двигателя обычно имеет две катушки и восемь полюсов. После подачи питания на одну катушку два противоположных полюса будут СЕВЕР , а два — ЮГ . Затем ротор будет вращаться, чтобы совместить его намагниченные зубья с разными ( S и N ) полюсами статора.
Поскольку ротор имеет два кольца с разными полюсами, на каждом шаге его «удерживают» четыре катушки, что увеличивает его крутящий момент.
Ротор этого шагового двигателя имеет 50 зубьев, и для поворота на одно деление требуется ровно 4 шага. Таким образом, легко подсчитать, что ротору нужно сделать 200 шагов, чтобы совершить оборот. Что составляет 1,8° на шаг ( ПОЛНЫЙ ШАГ ).
Униполярный и биполярный шаговый двигатель
Термин униполярный или биполярный шаговый двигатель не совсем точен. Это относится не ко всему двигателю, а только к обмотке его катушек. Хотя на практике очень часто можно однозначно определить, является ли данный степпер однополярным или биполярным . Но вы также можете встретить шаговый двигатель, который может быть как: «bi» , так и «uni» . Вам решать, как вы хотите относиться к нему.
Это относится не ко всему двигателю, а только к обмотке его катушек. Хотя на практике очень часто можно однозначно определить, является ли данный степпер однополярным или биполярным . Но вы также можете встретить шаговый двигатель, который может быть как: «bi» , так и «uni» . Вам решать, как вы хотите относиться к нему.
Поэтому для дальнейших рассуждений предположим, что речь идет о шаговом методе управления, а не о его типе.
Биполярный шаговый двигатель
Биполярный шаговый двигатель имеет четыре провода. Они работают с двумя обмотками, полностью изолированными друг от друга.
Этими шаговыми двигателями довольно сложно управлять. Потому что, чтобы изменить магнитный полюс, мы должны изменить направление тока, протекающего в обмотке. И делается это двумя Н-мостами (восемь транзисторов).
Но на этом недостатки заканчиваются, а дальше одни достоинства 🙂
Мы можем использовать всю длину катушки в каждой фазе, что дает высокий крутящий момент. Кроме того, их конструкция достаточно проста.
Кроме того, их конструкция достаточно проста.
Униполярный шаговый двигатель
Униполярный шаговый двигатель имеет пять проводов. Они работают с одной обмоткой с центральным отводом на фазу. Общий провод ( COM ) постоянно соединен с землей (чаще всего). Мы можем обратить магнитное поле, поставив разъемы А или А’ ( В или В’ ).
Благодаря такой конструкции для управления этим двигателем достаточно четырех транзисторов (а не восьми, как в биполярных шаговых двигателях).
Но поскольку мы можем использовать только половину катушки в каждой фазе, эти шаговые двигатели имеют относительно низкий крутящий момент.
Биполярный или униполярный шаговый двигатель
Этот тип шагового двигателя имеет шесть проводов. Как вы можете видеть на картинке, это комбинация униполярных и биполярных двигателей. Он имеет две обмотки, отделенные друг от друга, но они разделены пополам и выведены в виде двух дополнительных проводов. Это решение позволяет управлять обоими способами. Вам решать, предпочитаете ли вы больший крутящий момент или более простое управление.
Это решение позволяет управлять обоими способами. Вам решать, предпочитаете ли вы больший крутящий момент или более простое управление.
Что нужно учитывать при выборе шагового двигателя?
Недостатки
- скорость шаговых двигателей не очень впечатляет – от нескольких до дюжины оборотов в секунду
- по мере увеличения скорости его удерживающий момент (Нм) уменьшается
- относительно высокое энергопотребление
- высокий нагрев эмиссия
- при слишком высокой нагрузке возможны пропуски шагов
Преимущества
- высокая точность позиционирования, без обратной связи
- простота управления – количество импульсов определяет положение вала, а частота определяет скорость
- возможность работы на малых скоростях (не нужны передачи)
- срок службы шаговых двигателей достаточно долгий, благодаря отсутствие фрикционных элементов
Резюме
В этой статье я не рассмотрел все типы шаговых двигателей. Но их так много, что я мог бы написать книгу. И я предполагаю, что вы здесь, потому что просто хотели узнать, как работают эти двигатели. Поэтому я сосредоточился только на самых популярных типах, которые вы можете встретить ежедневно.
Но их так много, что я мог бы написать книгу. И я предполагаю, что вы здесь, потому что просто хотели узнать, как работают эти двигатели. Поэтому я сосредоточился только на самых популярных типах, которые вы можете встретить ежедневно.
Надеюсь, эти знания пригодятся вам при выборе шагового двигателя для вашего следующего проекта 🙂
Статьи по теме
Что такое Умный дом?
Имею дело с Умным Домом уже пару …
Как спроектировать вольер с помощью фотограмметрии? — Полное руководство
В этой статье я покажу вам шаг за шагом…
Как запустить Умный дом – пошаговое иллюстрированное руководство
Это первая статья из серии, в которой …
Как работают шаговые двигатели
На рисунках ниже показаны два поперечных сечения 5-фазного шагового двигателя. Шаговый двигатель состоит в основном из двух частей: статора и ротора. Ротор состоит из трех компонентов: ротора 1, ротора 2 и постоянного магнита.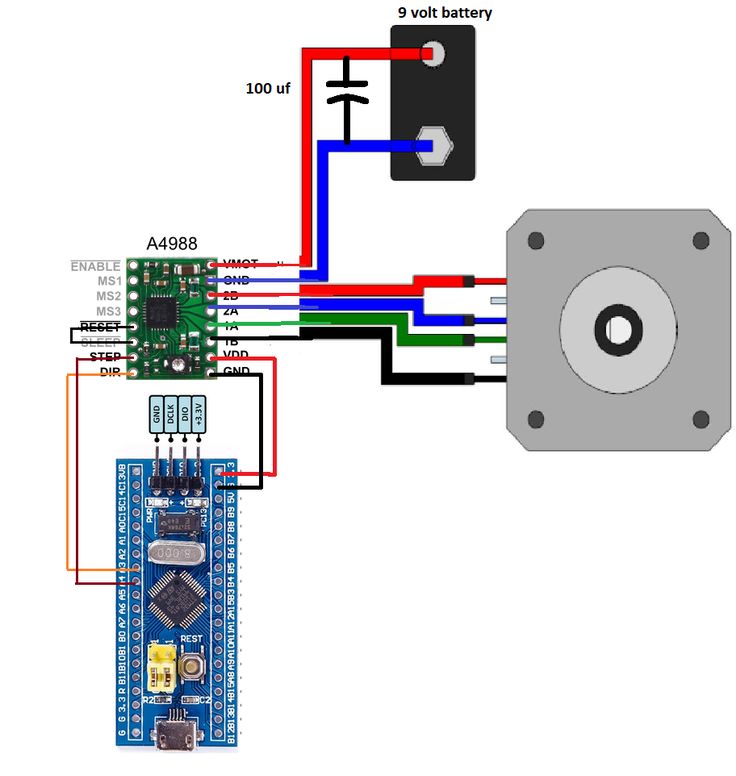 Ротор намагничен в осевом направлении, так что, например, если ротор 1 поляризован на север, ротор 2 будет поляризован на юг.
Ротор намагничен в осевом направлении, так что, например, если ротор 1 поляризован на север, ротор 2 будет поляризован на юг.
Статор имеет десять магнитных полюсов с маленькими зубьями, каждый полюс снабжен обмоткой. Каждая обмотка соединена с обмоткой противоположного полюса, так что оба полюса намагничиваются с одинаковой полярностью, когда ток проходит через пару обмоток. (Пропускание тока через данную обмотку намагничивает противоположную пару полюсов той же полярности, то есть северной или южной.)
Противоположная пара полюсов составляет одну фазу. Поскольку имеется пять фаз от A до E, двигатель называется «5-фазным шаговым двигателем».
По внешнему периметру каждого ротора имеется 50 маленьких зубьев, при этом маленькие зубья ротора 1 и ротора 2 механически смещены друг относительно друга на половину шага зубьев.
Возбуждение: Для подачи тока через обмотку двигателя
Магнитный полюс: Выступающая часть статора, намагниченная возбуждением
Мелкие зубья: Зубья на роторе и статоре 9003
Ниже приводится пояснение взаимосвязи между малыми зубьями намагниченного статора и малыми зубьями ротора.
При возбуждении фазы «А»
При возбуждении фазы А ее полюса поляризованы на юг. Это притягивает зубья ротора 1, поляризованные на север, и отталкивает зубья ротора 2, поляризованные на юг. Следовательно, силы, действующие на весь блок в равновесии, удерживают ротор в неподвижном состоянии. В это время зубцы полюсов фазы В, которые не возбуждены, смещены с южнополяризованными зубьями ротора 2 так, что они смещены на 0,72˚. Это суммирует взаимосвязь между зубьями статора и зубьями ротора при возбужденной фазе А.
При возбуждении фазы «B»
Когда возбуждение переключается с фазы A на B, полюса фазы B поляризованы на север, притягивая южную полярность ротора 2 и отталкивая северную полярность ротора 1.
Другими словами, при переключении возбуждения с фазы А на В ротор поворачивается на 0,72˚. Когда возбуждение переходит от фазы A к фазам B, C, D и E, а затем обратно к фазе A, шаговый двигатель вращается точно с шагом 0,72˚. Чтобы вращаться в обратном направлении, измените последовательность возбуждения на фазы A, E, D, C, B, а затем обратно на фазу A.
Чтобы вращаться в обратном направлении, измените последовательность возбуждения на фазы A, E, D, C, B, а затем обратно на фазу A.
Высокое разрешение 0,72˚ присуще механическому смещению между статором и ротором, что обеспечивает достижение точного позиционирования без использования энкодера или других датчиков. Достигается высокая точность остановки }3 угловых минуты (без нагрузки), поскольку единственными факторами, влияющими на точность остановки, являются различия в точности обработки статора и ротора, точности сборки и сопротивлении обмоток постоянному току.
Драйвер выполняет роль переключателя фаз, а его синхронизация управляется импульсно-сигнальным входом в драйвер. В приведенном выше примере показано, что возбуждение продвигается вперед по одной фазе за раз, но в реальном шаговом двигателе эффективное использование обмоток достигается за счет одновременного возбуждения четырех или пяти фаз.
Основные характеристики шаговых двигателей
Важным моментом, который следует учитывать при применении шаговых двигателей, является соответствие характеристик двигателя условиям эксплуатации.
В следующих разделах описываются характеристики, которые необходимо учитывать при применении шаговых двигателей.
Двумя основными характеристиками производительности шагового двигателя являются:
- Динамические характеристики: Это пусковые и вращательные характеристики шагового двигателя, в основном влияющие на движение механизма и время цикла.
- Статические характеристики: Это характеристики, относящиеся к изменениям угла, которые происходят, когда шаговый двигатель находится в режиме покоя, влияя на уровень точности оборудования.
Динамические характеристики
Скорость – Характеристики крутящего момента На рисунке выше представлен график характеристик, показывающий взаимосвязь между скоростью и крутящим моментом приводимого шагового двигателя. Эти характеристики всегда учитываются при выборе шагового двигателя. Горизонтальная ось представляет скорость на выходном валу двигателя, а вертикальная ось представляет крутящий момент.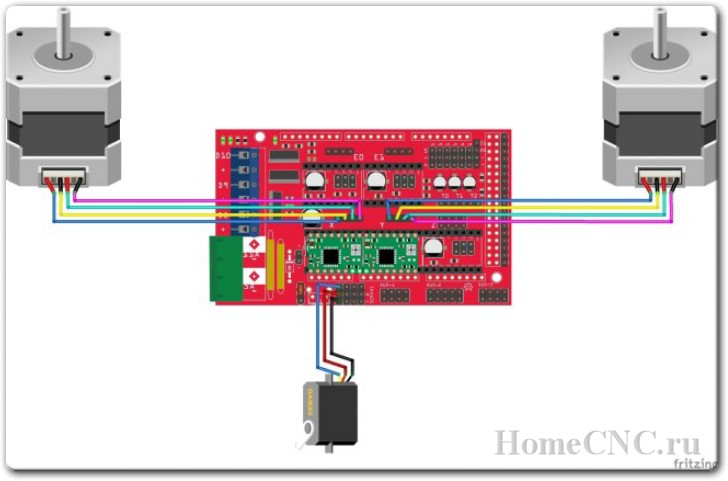 Характеристики скорость-крутящий момент определяются двигателем и приводом, и на них сильно влияет тип используемого привода.
Характеристики скорость-крутящий момент определяются двигателем и приводом, и на них сильно влияет тип используемого привода.
- Максимальный удерживающий момент (TH) Максимальный удерживающий момент — это максимальная удерживающая мощность (крутящий момент) шагового двигателя при подаче питания (при номинальном токе), когда двигатель не вращается.
- Момент отрыва Момент отрыва – это максимальный крутящий момент, который может быть выдан при заданной скорости. При выборе двигателя убедитесь, что требуемый крутящий момент находится в пределах этой кривой.
- Максимальная начальная частота (fS) Это максимальная импульсная скорость, при которой двигатель может запускаться или останавливаться мгновенно (без времени разгона/торможения), когда фрикционная и инерционная нагрузка шагового двигателя равны 0. Привод двигателя на импульсной скорости, превышающей эту скорость, потребует постепенное ускорение или замедление.
 Эта частота будет уменьшаться, когда к двигателю добавляется инерционная нагрузка. См. характеристики инерционной нагрузки – пусковой частоты ниже.
Эта частота будет уменьшаться, когда к двигателю добавляется инерционная нагрузка. См. характеристики инерционной нагрузки – пусковой частоты ниже.
Максимальная частота отклика (fr) Это максимальная импульсная скорость, при которой двигатель может работать посредством постепенного ускорения или замедления, когда нагрузка трения и инерционная нагрузка шагового двигателя равны 0. На рисунке ниже показаны характеристики скорость-крутящий момент 5-фазного шагового двигателя и комплекта драйвера. .
Инерционная нагрузка – характеристики пусковой частоты Эти характеристики показывают изменения пусковой частоты, вызванные инерцией нагрузки. Поскольку ротор шагового двигателя и нагрузка имеют свой собственный момент инерции, на оси двигателя возникают задержки и опережения во время мгновенного пуска и остановки. Эти значения изменяются в зависимости от скорости импульса, но двигатель не может следовать скорости импульса за пределами определенной точки, что приводит к ошибкам.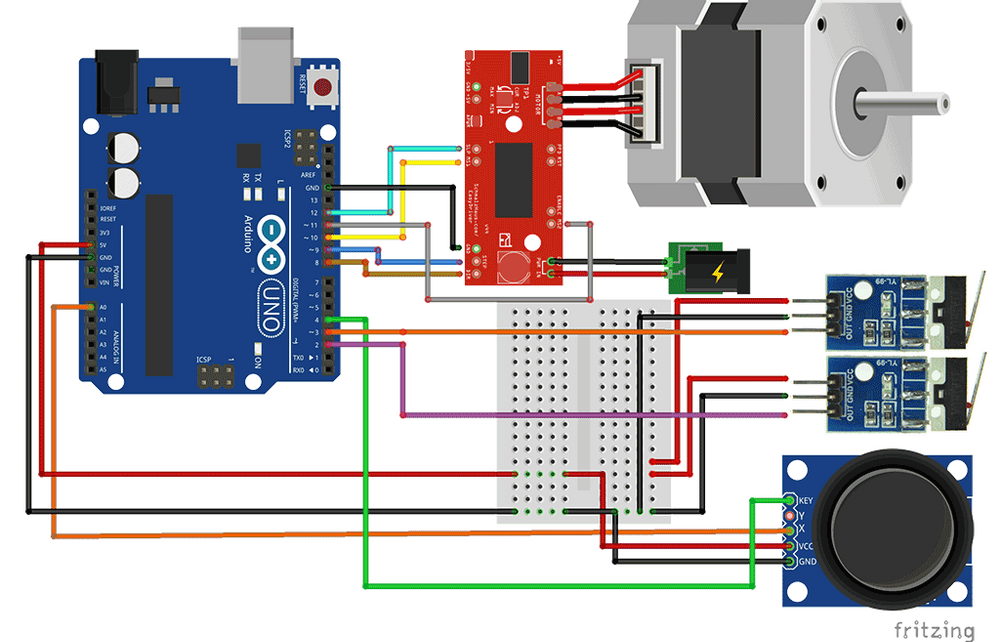 Скорость импульса непосредственно перед возникновением оплошности называется начальной частотой.
Скорость импульса непосредственно перед возникновением оплошности называется начальной частотой.
Изменения максимальной пусковой частоты при инерционной нагрузке могут быть аппроксимированы следующей формулой:
Характеристики вибрации
Шаговый двигатель вращается посредством серии шаговых движений. Шаговое движение может быть описано как одношаговая реакция, как показано ниже:
1. Одиночный импульс, поступающий на шаговый двигатель в состоянии покоя, ускоряет двигатель до следующего положения остановки.
2. Ускоренный двигатель вращается через положение остановки, вылетает на определенный угол и отводится назад в обратном направлении.
3. Двигатель останавливается в заданном положении после демпфирующих колебаний.
Вибрация на низких скоростях вызвана ступенчатым движением, которое создает этот тип демпфирующих колебаний. На приведенном ниже графике характеристик вибрации представлена величина вибрации двигателя при вращении. Чем ниже уровень вибрации, тем плавнее будет вращение двигателя.
Чем ниже уровень вибрации, тем плавнее будет вращение двигателя.
Статические характеристики
Угол – Характеристики крутящего момента: Характеристики «угол-крутящий момент» показывают взаимосвязь между угловым смещением ротора и крутящим моментом, приложенным извне к валу двигателя, когда двигатель возбуждается номинальным током. Кривая для этих характеристик показана ниже:
На следующих рисунках показано положение зубьев ротора и статора в пронумерованных точках на приведенной выше диаграмме. При устойчивом положении в точке (1) внешнее приложение силы к валу двигателя создаст крутящий момент T (+) в левом направлении, пытаясь вернуть вал в устойчивую точку (1). Вал остановится, когда внешняя сила сравняется с крутящим моментом в точке (2).
При приложении дополнительной внешней силы существует угол, при котором создаваемый крутящий момент достигает своего максимума в точке (3). Этот крутящий момент называется максимальным удерживающим крутящим моментом TH.
Приложение внешней силы, превышающей это значение, приведет ротор в неустойчивую точку (5) и выше, создав крутящий момент T (-) в том же направлении, что и внешняя сила, так что он переместится в следующую стабильную точку ( 1) и останавливается.
Стабильные точки: точек, где ротор останавливается, при этом зубья статора и зубья ротора точно выровнены. Эти точки чрезвычайно стабильны, и ротор всегда будет останавливаться там, если не будет приложена внешняя сила.
Нестабильные точки: Точки, в которых зубья статора и ротора смещены на полшага. Ротор в этих точках будет двигаться к следующей устойчивой точке влево или вправо даже при малейшей внешней силе.
Угловая точность
В условиях отсутствия нагрузки шаговый двигатель имеет угловую точность в пределах ±3 угловых минуты (±0,05˚). Небольшая ошибка возникает из-за разницы в механической точности статора и ротора, а также из-за небольшой разницы в сопротивлении постоянного тока обмотки статора. Как правило, угловая точность шагового двигателя выражается в терминах точности положения остановки.
Как правило, угловая точность шагового двигателя выражается в терминах точности положения остановки.
Точность положения остановки: Точность положения остановки — это разница между теоретическим положением остановки ротора и его фактическим положением остановки. За исходную точку принимается заданная точка остановки ротора, тогда точность положения остановки представляет собой разницу между максимальным (+) значением и максимальным (-) значением в совокупности измерений, выполненных для каждого шага полного оборота.
Точность положения остановки составляет ±3 угловых минуты (±0,05˚), но только при отсутствии нагрузки. В реальных приложениях всегда присутствует одна и та же величина фрикционной нагрузки. Угловая точность в таких случаях обеспечивается угловым смещением, вызванным характеристикой «угол-крутящий момент», основанной на фрикционной нагрузке. Если нагрузка трения постоянна, угол смещения будет постоянным для однонаправленной работы.
Однако при двунаправленной работе угол смещения увеличивается вдвое за круговорот. Когда требуется высокая точность остановки, всегда устанавливайте в одном и том же направлении.
Последовательность возбуждения шагового двигателя и комплекты драйверов
Каждый 5-фазный двигатель и комплект драйверов, представленные в нашем каталоге, состоят из двигателя New Pentagon с пятивыводным проводом и драйвера со специальной последовательностью возбуждения. Эта комбинация, являющаяся собственностью Oriental Motor, предлагает следующие преимущества:
- Простые соединения для пяти проводов
- Низкая вибрация
В следующих разделах описывается последовательность проводки и возбуждения.
New Pentagon, 4-фазное возбуждение: система полного шага (0,72˚/шаг)
Это уникальная система для 5-фазного двигателя, в которой возбуждаются четыре фазы. Угол шага составляет 0,72˚ (0,36˚). Он обеспечивает отличный демпфирующий эффект и, следовательно, стабильную работу.
New Pentagon, 4-5-фазное возбуждение: полушаговая система (0,36˚/шаг)
Пошаговая последовательность чередования 4-фазного и 5-фазного возбуждения обеспечивает вращение на 0,36˚ за шаг. Один оборот можно разделить на 1000 шагов.
Драйверы шаговых двигателей
Существуют две распространенные системы привода шагового двигателя: привод постоянного тока и привод постоянного напряжения. Схема привода с постоянным напряжением проще, но добиться характеристик крутящего момента на высоких скоростях относительно сложнее.
Привод постоянного тока, с другой стороны, в настоящее время является наиболее часто используемым методом привода, поскольку он обеспечивает отличные характеристики крутящего момента на высоких скоростях. Все водители Oriental Motor используют систему привода постоянного тока.
Обзор системы привода постоянного тока
Шаговый двигатель вращается за счет последовательного переключения тока, протекающего через обмотки.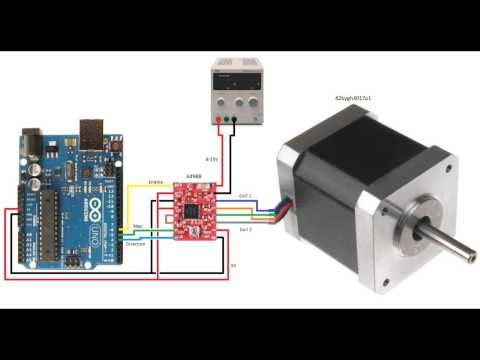 Когда скорость увеличивается, скорость переключения также становится выше, а рост тока отстает, что приводит к потере крутящего момента. Прерывание постоянного напряжения, намного превышающего номинальное напряжение двигателя, гарантирует, что номинальный ток достигнет двигателя даже на более высоких скоростях.
Когда скорость увеличивается, скорость переключения также становится выше, а рост тока отстает, что приводит к потере крутящего момента. Прерывание постоянного напряжения, намного превышающего номинальное напряжение двигателя, гарантирует, что номинальный ток достигнет двигателя даже на более высоких скоростях.
Ток, протекающий по обмоткам двигателя, определяемый как напряжение через резистор обнаружения тока, сравнивается с эталонным напряжением. Управление током осуществляется путем удержания переключающего транзистора Tr2 во включенном состоянии, когда напряжение на детектирующем резисторе ниже опорного напряжения (когда оно не достигло номинального тока), или отключения Tr2, когда значение выше опорного напряжения ( когда он превышает номинальный ток), тем самым обеспечивая постоянный расход номинального тока.
Различия между входными характеристиками переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В комплектах двигателей и драйверов Oriental Motor с входным напряжением 24 В постоянного тока к двигателю подается 24 В постоянного тока. В двигателях и драйверах на 100-115 В переменного тока вход выпрямляется до постоянного тока, а затем на двигатель подается примерно 140 В постоянного тока. (Некоторые продукты являются исключением из этого правила.)
В комплектах двигателей и драйверов Oriental Motor с входным напряжением 24 В постоянного тока к двигателю подается 24 В постоянного тока. В двигателях и драйверах на 100-115 В переменного тока вход выпрямляется до постоянного тока, а затем на двигатель подается примерно 140 В постоянного тока. (Некоторые продукты являются исключением из этого правила.)
Эта разница в напряжениях, подаваемых на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает подачу номинального тока на более высоких скоростях.
Таким образом, двигатель переменного тока и блок драйвера имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких скоростей, предлагая большое передаточное число. Рекомендуется, чтобы для ваших приложений рассматривались двигатели с входом переменного тока и комплекты драйверов, совместимые с более широким диапазоном условий эксплуатации.
Технология привода Microstep
Технология привода Microstep используется для разделения основного угла шага (0,72˚) 5-фазного шагового двигателя на более мелкие шаги (максимум до 250 делений) без использования редуктора скорости механизм.
◇ Технология микрошагового привода
Шаговый двигатель перемещается и останавливается с шагом, равным углу шага, определяемому конструкцией явно выраженных полюсов ротора и статора,
легко достигая высокой степени точности позиционирования. С другой стороны, шаговый двигатель вызывает изменение скорости вращения ротора, поскольку
двигатель вращается с шагом шага, что приводит к резонансу или большей вибрации на заданной скорости.
Микрошаговая технология — это технология, обеспечивающая низкий резонанс и низкий уровень шума при чрезвычайно низких скоростях за счет управления потоком
электрический ток, подаваемый на обмотку двигателя и тем самым разделяющий основной угол шага двигателя на более мелкие шаги.
- Основной угол шага двигателя (0,72˚/полный шаг) можно разделить на более мелкие шаги в диапазоне от 1/1 до 1/250. Таким образом, микрошаг обеспечивает плавную работу.
- Благодаря технологии плавного изменения тока привода двигателя вибрация двигателя может быть сведена к минимуму для обеспечения малошумной работы.
◇ До 250 микрошагов
Благодаря драйверу микрошагов можно установить различные углы шага (16 шагов до 250 делений) с помощью двух переключателей настройки угла шага. Управляя входным сигналом для переключения угла шага через внешний источник, можно переключать угол шага между уровнями, установленными для соответствующих переключателей.
Особенности привода Microstep
● Низкая вибрация
Технология привода Microstep электронно разделяет угол шага на более мелкие шаги, обеспечивая плавное пошаговое движение на низких скоростях и значительно снижая вибрацию. В то время как демпфер или аналогичное устройство обычно используется для снижения вибрации, конструкция с низким уровнем вибрации, используемая для самого двигателя, вместе с технологией микрошагового привода более эффективно минимизирует вибрацию. Антивибрационные меры могут быть значительно упрощены, поэтому он идеально подходит для большинства приложений и оборудования, чувствительных к вибрации.
В то время как демпфер или аналогичное устройство обычно используется для снижения вибрации, конструкция с низким уровнем вибрации, используемая для самого двигателя, вместе с технологией микрошагового привода более эффективно минимизирует вибрацию. Антивибрационные меры могут быть значительно упрощены, поэтому он идеально подходит для большинства приложений и оборудования, чувствительных к вибрации.
● Низкий уровень шума
Технология привода Microstep эффективно снижает уровень шума, связанного с вибрацией, на низких скоростях, обеспечивая низкий уровень шума. Двигатель демонстрирует выдающуюся производительность даже в самых чувствительных к шуму условиях.
● Улучшенная управляемость
Новый микрошаговый драйвер Pentagon с превосходными характеристиками демпфирования сводит к минимуму перерегулирование и недорегулирование в ответ на ступенчатые изменения, точно следуя последовательности импульсов и обеспечивая улучшенную линейность. Кроме того, можно уменьшить ударную нагрузку, обычно возникающую при трогании с места и остановке.
Кроме того, можно уменьшить ударную нагрузку, обычно возникающую при трогании с места и остановке.
Шаговый двигатель и драйвер
Обзор системы управления
◇ Датчик для определения положения ротора
Датчик определения положения ротора встроен в противоположный конец выходного вала двигателя
:
Обмотка датчика обнаруживает изменения магнитного сопротивления из-за углового положения ротора.
Инновационная система управления с обратной связью
Счетчик отклонений вычисляет отклонение (запаздывание/опережение) фактического углового положения ротора относительно команды положения с помощью импульсного сигнала. Результат расчета используется для обнаружения «области ошибочного шага» и управления двигателем путем переключения между режимами разомкнутого и замкнутого контура.
- Если отклонение позиционирования меньше }1,8˚, двигатель работает в режиме разомкнутого контура.

- Если отклонение позиционирования составляет }1,8˚ или более, двигатель работает в режиме замкнутого контура.
В режиме замкнутого контура возбуждение обмотки двигателя регулируется таким образом, чтобы при заданном угловом положении ротора развивался максимальный крутящий момент. Этот метод управления устраняет нестабильные точки (зоны неточностей) в характеристике «угол-крутящий момент».
Особенности AlphaStep
◇ Улучшенная производительность шагового двигателя
- На высоких скоростях не будет «ошибок». Поэтому, в отличие от обычных шаговых двигателей, работа будет свободна от следующих ограничений:
- Ограничения скорости разгона/торможения и коэффициента инерции, обусловленные профилем импульсов контроллера.
- Ограничения скорости пускового импульса, вызванные «ошибкой».
- Используйте фильтр скорости для настройки отклика при запуске/остановке.
 Реагирование на пуск/остановку можно настроить с помощью 16 настроек без изменения данных контроллера (пусковой импульс, коэффициенты ускорения/торможения). Эта функция предназначена для уменьшения ударов при работе и вибрации при работе на низкой скорости.
Реагирование на пуск/остановку можно настроить с помощью 16 настроек без изменения данных контроллера (пусковой импульс, коэффициенты ускорения/торможения). Эта функция предназначена для уменьшения ударов при работе и вибрации при работе на низкой скорости.
Возврат в исходное положение механической части Работа с использованием сигнала синхронизации возбуждения
● Сигнал синхронизации возбуждения
Сигнал синхронизации возбуждения (TIM.) выводится, когда драйвер первоначально возбуждает шаговый двигатель (шаг «0»). 5-фазный шаговый двигатель и драйверы Oriental Motor выполняют начальное возбуждение при включении питания и продвигают последовательность возбуждения
каждый раз, когда поступает импульсный сигнал, завершая один цикл, когда вал двигателя поворачивается на 7,2˚.
Используйте эти сигналы синхронизации, когда необходимо выполнить высоковоспроизводимый возврат к механическому домашнему режиму. В следующих разделах описывается возврат шагового двигателя к механическому исходному режиму и использование сигналов синхронизации.
● Возврат к механическому домашнему режиму работы шаговых двигателей
При включении питания для запуска автоматизированного оборудования или перезапуске оборудования после сбоя питания необходимо вернуть шаговые двигатели в исходное положение. Эта операция называется «возврат к механическому домашнему режиму».
Возврат к механическому исходному режиму шаговых двигателей использует датчики исходного положения для обнаружения механического компонента, используемого для операции позиционирования. Когда обнаруженные сигналы подтверждаются, контроллер прекращает подачу импульсного сигнала, и шаговый двигатель останавливается. Точность исходного положения при таком возврате к механическому исходному положению зависит от эффективности обнаружения датчиков исходного положения. Поскольку эффективность обнаружения датчиков исходного положения зависит от таких факторов, как температура окружающей среды и скорость приближения к зоне обнаружения механизма, необходимо уменьшить эти факторы для приложений, требующих точно воспроизводимого механического определения исходного положения.
● Улучшенная воспроизводимость с использованием сигнала синхронизации возбуждения
Метод обеспечения того, чтобы механическое исходное положение не менялось из-за различий в характеристиках обнаружения датчиков исходного положения, заключается в остановке импульсного сигнала путем логического умножения на временной сигнал. Так как синхронизирующий сигнал выводится при начальном возбуждении, если импульсный сигнал останавливается, когда выводится синхронизирующий сигнал, механическое исходное положение всегда будет определяться при начальном возбуждении.
Зависимость между длиной кабеля и частотой передачи
По мере увеличения длины кабеля импульсной линии максимальная частота передачи уменьшается. В частности, резистивная составляющая и паразитная емкость кабеля вызывают формирование цепи CR, тем самым задерживая время нарастания и спада импульса. Блуждающая емкость в кабеле возникает между электрическими проводами и плоскостями заземления.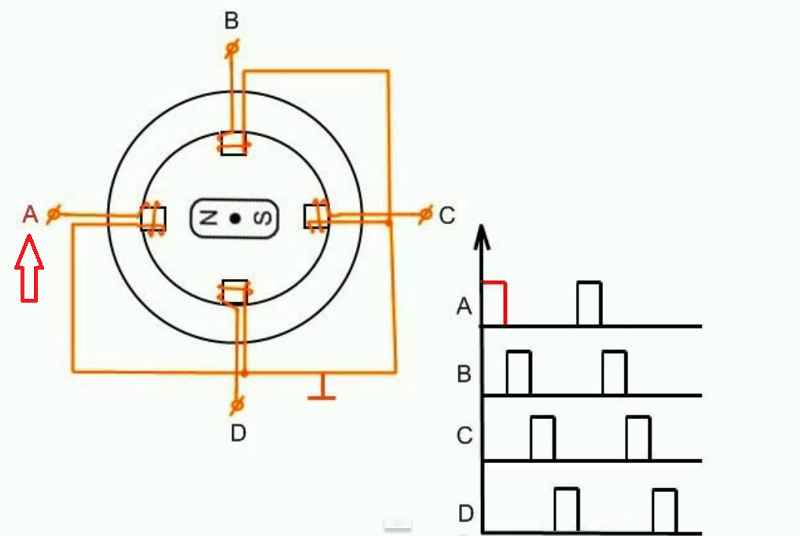 Однако трудно предоставить четкие числовые данные, поскольку условия различаются в зависимости от типа кабеля, его разводки, прокладки и других факторов.
Однако трудно предоставить четкие числовые данные, поскольку условия различаются в зависимости от типа кабеля, его разводки, прокладки и других факторов.
Частота передачи при работе с нашей продукцией (фактические измеренные эталонные значения) показана ниже:
Влияние жесткости муфты на оборудование
Технические характеристики муфты включают допустимую нагрузку, допустимую скорость, жесткость пружины при кручении, люфт (люфт) в муфте и допустимое смещение. На практике при выборе муфт для оборудования, требующего высокой эффективности позиционирования или низкой вибрации, основным критерием выбора будет «жесткость без люфта». Однако в некоторых случаях жесткость муфты лишь незначительно влияет на общую жесткость оборудования.
В этом разделе приводится пример сравнения общей жесткости оборудования, состоящего из шарико-винтовой передачи, в двух приложениях, где используются кулачковая муфта, такая как MCS, и сильфонная муфта, обеспечивающая более высокую жесткость.