Как собрать беспилотник в домашних условиях. Какие компоненты нужны для создания дрона. Как настроить и запрограммировать беспилотный летательный аппарат. Как научиться управлять самодельным дроном.
Компоненты для сборки беспилотника
Для создания беспилотного летательного аппарата (БПЛА) потребуются следующие основные компоненты:
- Рама — основа конструкции дрона
- Двигатели — обычно используются бесщеточные электромоторы
- Пропеллеры — создают подъемную силу
- Регуляторы оборотов (ESC) — управляют скоростью вращения двигателей
- Полетный контроллер — «мозг» дрона, отвечает за стабилизацию и управление
- Аккумулятор — источник питания
- Приемник — принимает сигналы с пульта управления
- Пульт дистанционного управления
Дополнительно могут понадобиться GPS-модуль, камера, подвес для камеры и другие компоненты в зависимости от назначения дрона.
Выбор и сборка рамы дрона
Рама является основой конструкции беспилотника. Существует несколько вариантов:

- Готовая рама из магазина — наиболее простой вариант для начинающих
- Самодельная рама из доступных материалов (дерево, пластик, карбон)
- 3D-печатная рама по готовой модели или собственному дизайну
При выборе рамы учитывайте:
- Размер — от него зависят летные характеристики
- Количество лучей — определяет число моторов (обычно 4, 6 или 8)
- Материал — влияет на прочность и вес конструкции
- Компоновку — возможность удобного размещения компонентов
Соберите раму согласно инструкции или чертежу, обеспечив надежное крепление всех элементов.
Установка моторов и пропеллеров
Выбор моторов и пропеллеров — важный этап создания дрона. Как правильно подобрать и установить эти компоненты:
- Рассчитайте требуемую тягу моторов исходя из массы дрона
- Подберите бесщеточные моторы подходящего размера и мощности
- Выберите пропеллеры, совместимые с моторами по размеру и шагу
- Надежно закрепите моторы на лучах рамы с помощью винтов
- Подключите провода моторов к регуляторам оборотов
- Установите пропеллеры на валы моторов, соблюдая направление вращения
Убедитесь, что все крепления надежны, а пропеллеры сбалансированы для уменьшения вибраций.

Подключение электроники дрона
Правильное подключение электронных компонентов критически важно для работоспособности беспилотника. Основные этапы:
- Установите полетный контроллер в центре рамы на амортизирующие стойки
- Подключите регуляторы оборотов к соответствующим выходам контроллера
- Присоедините приемник к порту для приема сигналов с пульта
- Подключите GPS-модуль, если он используется
- Соедините силовые провода регуляторов с платой распределения питания
- Подключите аккумулятор через силовой разъем
Тщательно изолируйте все соединения и аккуратно уложите провода, чтобы они не мешали движущимся частям.
Настройка полетного контроллера
Полетный контроллер требует правильной настройки для обеспечения стабильного полета дрона. Основные шаги:
- Установите на компьютер программное обеспечение для настройки (например, Betaflight)
- Подключите контроллер к компьютеру по USB
- Выберите прошивку, соответствующую вашей модели контроллера
- Настройте параметры PID-регулятора для стабилизации
- Откалибруйте акселерометр и гироскоп
- Настройте режимы полета (например, стабилизация, удержание высоты)
- Проверьте направление вращения моторов и при необходимости исправьте
Не забудьте сохранить настройки в памяти контроллера перед отключением от компьютера.

Программирование автономного полета
Для выполнения автономных полетов дрон необходимо запрограммировать. Основные этапы:
- Выберите среду программирования (например, ArduPilot или PX4)
- Установите необходимое программное обеспечение на полетный контроллер
- Настройте параметры автопилота (высота, скорость, точки маршрута)
- Запрограммируйте желаемый маршрут и действия дрона
- Настройте функции безопасности (возврат домой, аварийная посадка)
- Протестируйте автономный полет в безопасных условиях
Всегда соблюдайте законодательство при выполнении автономных полетов беспилотников.
Тестирование и калибровка дрона
Перед первым полетом необходимо тщательно протестировать и откалибровать все системы беспилотника:
- Проверьте надежность всех креплений и соединений
- Выполните калибровку компаса и акселерометра
- Протестируйте работу моторов на малых оборотах
- Проверьте отклик дрона на команды с пульта управления
- Откалибруйте гироскоп в горизонтальном положении
- Настройте чувствительность стиков пульта управления
- Выполните пробный взлет на небольшую высоту
Первые полеты рекомендуется проводить на открытой местности вдали от препятствий и людей.
Обучение управлению беспилотником
Управление дроном требует определенных навыков. Как научиться пилотировать свой беспилотник:
- Изучите основы аэродинамики и принципы полета квадрокоптеров
- Освойте базовые маневры: взлет, зависание, посадка
- Тренируйтесь выполнять простые фигуры пилотажа
- Научитесь ориентировать дрон в пространстве при разных положениях
- Отработайте полеты в ручном режиме без вспомогательных систем
- Освойте технику FPV-полетов от первого лица
- Регулярно практикуйтесь для поддержания навыков
Техника безопасности при эксплуатации дрона
При использовании беспилотника важно соблюдать правила безопасности:
- Изучите местное законодательство о полетах дронов
- Проводите предполетный осмотр и проверку систем
- Летайте только в разрешенных зонах на безопасном расстоянии от людей
- Соблюдайте ограничения по высоте и дальности полета
- Не теряйте визуальный контакт с дроном
- Избегайте полетов при сильном ветре и осадках
- Следите за уровнем заряда аккумулятора
- Будьте готовы к аварийной посадке в любой момент
Помните, что безопасность окружающих и сохранность имущества важнее любых полетных заданий.

как создать свой дрон и управлять его движением
Дроны нужны не только для развлечений и съемок красивых видов, они способны на большее. Исследователи уже делают беспилотники, которые общаются друг с другом и ищут тонущих людей. Они же представляют устройства, которые доставляют товары быстрее любого курьера. Летающее беспилотное такси — тоже не фантазия ученых, а транспорт будущего. Что нам ждать и какие устройства разрабатывают в Иннополисе — в своей лекции рассказал Роман Федоренко, экс-доцент Лаборатории специальной робототехники Университета Иннополис.
Читайте «Хайтек» в
Кто такие роботы?
Несколько лет назад на Reddit появилась классная штука — ученые описывали сложные исследования одной простой фразой. Если бы меня попросили так сделать, я бы сказал, что робототехника — область, где можно увидеть, как двигается код.
Робототехника — это синергетическая прикладная сфера деятельности. Она состоит из программирования, мехатроники и кибернетики. Мехатроника — это то, что взаимодействует с реальным миром. А кибернетика — многозвенная наука, которая включает в себя, прежде всего, управление созданными программами.
А кибернетика — многозвенная наука, которая включает в себя, прежде всего, управление созданными программами.
Что такое робот? 15 лет назад многие бы сказали, что это робот-манипулятор, который работает на заводе и занимается сваркой или покраской. Другой популярный ответ — это робот-андроид из мира кино. Но является ли роботом подвижная тележка или беспилотный автомобиль? Да, это тоже одна из областей роботехники. Летательные аппараты — тоже роботы, одни из самых последних разработок включают в себя интеллектуальные технологии и являются, по сути, автономными роботами.
Подвижная тележка — это тоже роботЕще есть такая область робототехники как field robotics — «мобильная робототехника». Сюда включают всех роботов, которые двигаются в поле, здании или под водой. Самое интересное применение, на мой взгляд, — это сельское хозяйство.
История летательных аппаратовИстория летательных аппаратов началась в прошлом веке. До этого летали только воздушные шары без двигателя, и их сложно было назвать роботами.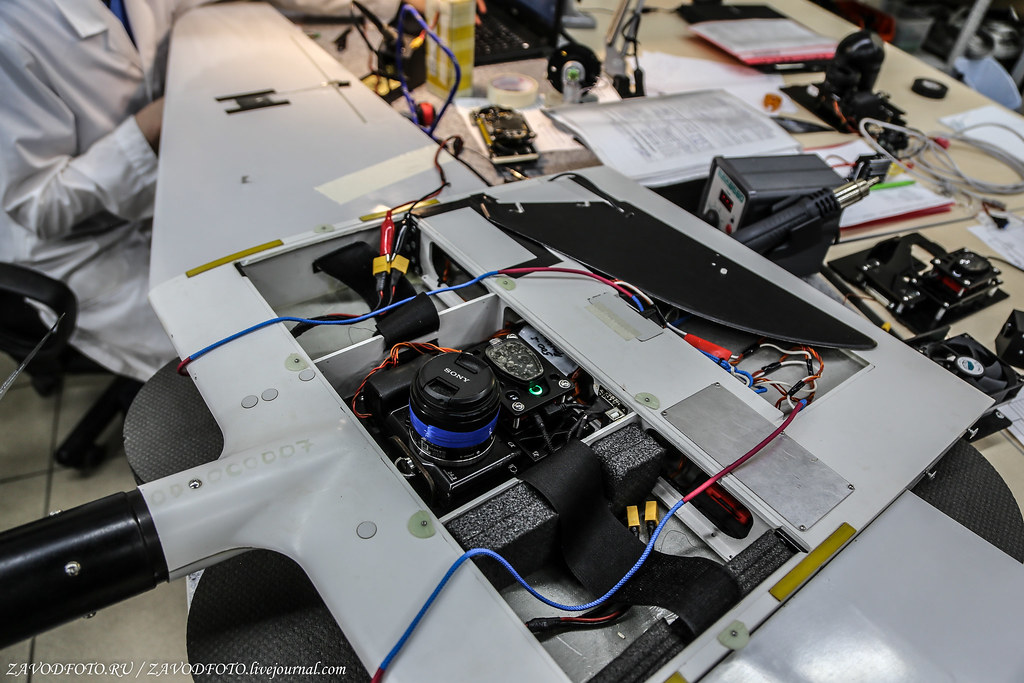 В начале прошлого века функционировали два типа летательных аппаратов — дирижабли и самолеты. Первый управляемый полет совершили братья Райт. Причем первый автопилот появился довольно быстро, практически через 10 лет после этого, он помогал стабилизировать полет.
В начале прошлого века функционировали два типа летательных аппаратов — дирижабли и самолеты. Первый управляемый полет совершили братья Райт. Причем первый автопилот появился довольно быстро, практически через 10 лет после этого, он помогал стабилизировать полет.
Текущее направление робототехники связано с развитием и доступностью новых открытых автопилотов, таких как PixHawk (PixHawk — открытое аппаратное обеспечение для контроллеров, дронов и других БПЛА. Его используют для академических, любительских и профессиональных целей). Пример прихода дронов в жизнь каждого человека — доставка пиццы компанией «Додо Пицца» совместно с «Коптр экспресс» — это произошло в 2014 году.
История летальных аппаратовКак управляется дронСовременные летательные аппараты используют один из трех принципов создания подъемной силы — аэростатический, реактивный или аэродинамический. Аэродинамический принцип полета и создания подъемной силы (отбрасывание вниз части воздуха) можно реализовать либо за счет движения всего аппарата, снабженного неподвижной несущей поверхностью (крыло), либо за счет движения отдельных несущих частей аппарата (несущий винт, вентилятор) относительно воздушной среды.
У дрона есть винт, который создает подъемную тягу. Оторвавшись от земли, устройство начинает двигать винтом быстрее и поднимается вверх. Но сила действия равна силе противодействия. При вращении винта создается момент в другую сторону — с этим связана конструкция вертолетов и коптера. Если у вертолета будет один винт — он не будет стабильным. Поэтому устройство использует либо схему с двумя винтами, либо хвостовой винт.
В квадрокоптере очень простая конструкция — у него обычно четыре винта, два из которых вращаются в одну сторону, а два — в другую. Если пользователю нужно двигаться вперед, то одни винты вращаются медленнее, а другие — быстрее. А если пользователь хочет повернуть, то одни винты, размещенные по диагонали, ускоряются, а другие — замедляются.
Как летает квадрокоптерДвижения коптера по углам связаны с движением по координатам. Если пилот хочет двигаться вперед, нужно сначала наклонить дрон вперед, а затем, когда устройство на электротяге потянется вперед, стабилизировать его в той точке, где мы хотим остаться.
Это схема одного из самых популярных автопилотов, на базе которого можно сделать новые устройства. Он подключается ко всем моторам и датчикам. Причем у моторов есть свой блок управления, регулятор ESC — Electronic Speed Controller, управляющий оборотами мотора.
Из сенсоров здесь есть GPS, чтобы дрон мог работать вне помещений, летать по точкам и стабилизировать положение. Но внутри самого автопилота также есть IMU — модуль инерциальных датчиков, который позволяет ему определять углы ориентации. Также есть канал связи, наземный пункт управления и батарея.
Устройство БПЛАКак говорилось выше, существует некий уровень управления двигателем — мы, уже не задумываясь, можем задать скорость вращения. По тому же принципу работают и остальные уровни: следующий — это управление ориентацией.
Но прежде нам нужно управлять скоростью вращения — на этом уровне летают FPV-коптеры (устройства, которые позволяют наблюдать за картинкой с камеры дрона в режиме реального времени от первого лица (FPV – First Person View). Опытные пилоты задают скорость вращения и постоянно подруливают джойстиком. Следующий этап — когда пользователь может стабилизировать угол, но при этом дрон все равно будет двигаться. Дальше — контроль скорости, а самый высокий — это позиционное управление, маневры для движения в точку или движение по заданной траектории.
Опытные пилоты задают скорость вращения и постоянно подруливают джойстиком. Следующий этап — когда пользователь может стабилизировать угол, но при этом дрон все равно будет двигаться. Дальше — контроль скорости, а самый высокий — это позиционное управление, маневры для движения в точку или движение по заданной траектории.
Те, кто хотят программировать, собирать и управлять дронами — должны обратить внимание на opensource-автопилот PIX4. Вокруг воздушной роботехники есть целое сообщество (ROS — robotic operating system, или Open robotics), есть симуляторы для дронов. Поэтому многие эксперименты можно совершить в симуляторе, не имея самого дрона.
Стадии разработки дронаИсследователи начинают с концептуального моделирования, а затем им нужно построить точную модель аппарата. Не углубляясь в формулу, модель коптера — это, по сути, модель твердого тела. Это второй закон Ньютона, расширенный на системы частиц. Он имеет поступательное и вращательное движение, есть кинематика и динамика движения, а чтобы описать модель конкретного аппарата, мы должны добавить сюда уравнение сил, действующих на конкретный дрон.
Следующим этапом является разработка системы управления. Если идти классическим способом: сначала мы узнаем точную математическую модель и на ее основе уже синтезируем алгоритм управления или новые формулы. В систему управления можно включать все уровни: планирование движения, восприятие среды, оценивание состояния с помощью датчиков. Алгоритмы позволяют уточнять наши координаты и данные.
Система управления дронамиКогда есть алгоритм управления, его можно сразу применять, но делать это довольно затратно. Устройства падают при малейшей ошибке — это надо учитывать и делать резервные копии. Для тестирования используются симуляторы.
Ниже показана виртуальная экскурсия по Иннополису — продукт нашего университета, он доступен для скачивания на GitHub. Это не только визуальная составляющая, но и данные всех датчиков аппарата. У него есть все позиционные датчики, им управляют как дроном и могут отлаживать все алгоритмы управления.
Так дроны учатся в симуляцииКогда на основе опыта с симулятором появляется больше уверенности — можно переходить к аппаратной реализации. Здесь показаны ее составляющие: изготовление аппарата из карбона и композита, создание электроники, размещение двигателей, их крепление.
Здесь показаны ее составляющие: изготовление аппарата из карбона и композита, создание электроники, размещение двигателей, их крепление.
Тесты начинаются не на улице: сначала устройства тестируются на подвесе или специальном стенде. На них можно отлаживать элементы функционирования беспилотного летательного аппарата. Например, здесь показан самолет вертикального взлета и посадки — это гибрид коптера и самолета, на видео можно увидеть, как он справляется со внешними возмущениями и держит угол. Справа показан довольно безумный эксперимент, когда запускают пять двигателей одновременно и смотрят, как система управления справляется с этим.
Так строят дроныПосле тестирования переходят к подлетам — небольшие взлеты на небольших скоростях, управляемое движение с пилотом, который может перехватить контроль. Финальным аккордом является полностью беспилотный полет.
Устройство взлетает вертикально — «по-коптерному», потом у него включается маршевый двигатель, беспилотник разгоняется, переходит в самолетный режим, развивает достаточную скорость, чтобы работало крыло. Затем контурные винты выключаются, и он летит по-самолетному — процесс посадки осуществляется в обратной последовательности.
Затем контурные винты выключаются, и он летит по-самолетному — процесс посадки осуществляется в обратной последовательности.
Одна из задач, над которой работают современные ученые — обход препятствий при полете. Некоторые дроны уже умеют это, но задача стоит чуть шире — надо научить устройства как можно быстрее двигаться в среде с препятствиями. И тут по-прежнему есть куда стремиться и улучшать алгоритмы.
Еще один пример такого тестирования — полет в лесу. Есть очень интересный подход — здесь применяются не только новые алгоритмы, но и сенсорика — ивенткамера. Это очень высокочастотная камера, которая передает разницу между кадрами в каждую единицу времени: это позволяет быстро осуществлять управление и реагировать на препятствия.
В области планирования движения дрона проводятся соревнования: кто быстрее это сделает. Задача состоит в том, чтобы картографировать неизвестную область, построить ее трехмерное представление, найти на ней объекты. Мы летали в университете, но тоже решали задачу поиска объектов. Наши результаты были даже лучше, чем у известных опубликованных алгоритмов.
Мы летали в университете, но тоже решали задачу поиска объектов. Наши результаты были даже лучше, чем у известных опубликованных алгоритмов.
Существуют соревнования и по гонке дронов. Они делаются на устройствах с камерой, когда у пилота есть очки и он управляет дроном, чтобы максимально быстро пролететь через ворота. Довольно зрелищное мероприятие, где ту же задачу надо выполнить и в автоматическом режиме. К сожалению, пока компьютеру удалось победить человека только в шахматы, а робот-дрон не смог обогнать человека-пилота, хотя прогресс уже довольно серьезный. Дрон с помощью алгоритма машинного зрения может выполнять такие задачи, работа идет только на увеличение скорости.
Еще одно соревнование — Microsoft Games of drones, оно проводится в симуляторе. В этой же области проводится одно из известных ведущих соревнований в Саудовской Аравии. Участники там набираются на три года вперед.
Беспилотные устройства используют для шоу дронов — это зрелищные мероприятия, которые сегодня стали заменой салютам. Но это не единственное групповое применение — они могут инспектировать большую область.
Но это не единственное групповое применение — они могут инспектировать большую область.
Чтобы это не выглядело как исключительно научные разработки, ниже — демо дрона Skydio. Сейчас это самое совершенное устройство по части автономности. Это пример того, как современные технологии — картография, обход препятствий, планирование движения используются совместно в уже доступном для пользователя продукте.
Еще одно направление — это новые конструкции летательных аппаратов. Одно из них — складные дроны. Одно такое устройство может залетать в узкие пространства для инспекции после аварии. Другой пример — дрон, который может раскладываться. Например, он умеет вылетать из узкой пневматической трубы и дальше лететь в обычном режиме.
У нас тоже есть проект в этой области — это мягкий Tensodrone. Это первый дрон мягкой конструкции, который летает. Удовольствие заключается в том, что его можно ронять и он останется целым. Кроме того, можно изменить длины балок, натяжение тросов.
Два примера, которые воплотятся в жизнь в ближайшее время. Во-первых, доставка с помощью дронов. Сейчас есть очень интересная реализация, когда мы совмещаем почтомат и посадочную станцию дрона — в этом случае не нужно заботиться о том, когда дрон прилетит, куда он сядет, чтобы мы к нему вышли вовремя, забрали груз, пока его не украли. Второй пример — летающее такси. Это самая впечатляющая область разработок, уже есть работающие прототипы. Но это произойдет только в ближайшее десятилетие.
Какие разработки в области летающих такси появлялись за последние 6 лет:
— Компания «Ховер» представила аппарат с малошумным электродвигателем и компактными габаритами — как у автомобиля. Он взлетает на высоту 150 м и садится на стандартное парковочное место. Дрон рассчитан на двух пассажиров, максимальная грузоподъемность — 300 кг, а скорость — 200 км/ч.
— В 2016 году российская компания Hoversurf показала ховербайк, который можно носить с собой и в любой момент взлететь с обычного городского парковочного места. Он развивает скорость до 100 км/ч, а высота подъема принудительно ограничена 5 метрами в целях безопасности.
— В 2018 году разработанный Airbus пассажирский VTOL-самолет Alpha One поднялся на высоту 5 метров и продержался в воздухе 53 секунды. Пользователь сможет вызвать БПЛА через приложение и добраться из одной точки в другую как в черте города, так и за его пределами.
— В 2020 году аэротакси CityAirbus совершило первый свободный полет. Тестирование состоялось в пригороде Парижа, городе Иль-де-Франс.Летательный аппарат CityAirbus способен передвигаться со скоростью до 120 км/час на расстояние до 30 км. Вес летающего такси — более 2,2 т, CityAirbus оборудован тремя пассажирскими местами и одним водительским.
Тестирование состоялось в пригороде Парижа, городе Иль-де-Франс.Летательный аппарат CityAirbus способен передвигаться со скоростью до 120 км/час на расстояние до 30 км. Вес летающего такси — более 2,2 т, CityAirbus оборудован тремя пассажирскими местами и одним водительским.
— В 2022 году китайский стартап Pantuo Aviation представил T1 — это демонстратор летающего такси с воздуховодом. Он будет летать со скоростью более 300 км/ч, а дальность полета составит 250 км.
Читать далее:
Космический зонд пролетел в 200 км от Меркурия. Посмотрите, что он увидел
Ученые раскрыли, как витамины влияют на заболеваемость раком
Китайский шлем для «чтения мыслей» бьет тревогу, когда человек видит порноконтент
Собираем свой маленький беспилотник / Хабр
Будем делать вот такой, маленький, как на картинке, беспилотный автомобиль.
Вот так выглядят маленькие беспилотникиКак я дошёл до этого
Мне всегда были интересны темы беспилотников и роботов, но руки до такого не доходили — боялся слишком большого объёма навыков, которые потребуются для этого.
В марте-апреле 2020го года, когда сидение дома уже порядком поднадоело, понял, что я созрел для беспилотников. И, вдохновлённый статьёй Беслана, принялся изучать вопрос и заказывать необходимые комплектующие на Али и в других магазинах.
Приезжали заказы в разное время, поэтому, из всего, что попадало под руку, собирал первые версии беспилотника (тогда ещё ни разу не беспилотного).
Первые шагиНачиналось всё с черепахоподобного поделия из картона, котому требовался сетевой провод. Провода от двух веб камер были перетянуты кабельными стяжками. А машинка не была соединена с компьютером, и я управлял ей с радиопульта от RC машинки.
В качестве мозга для беспилотника я выбрал Nvidia Jetson Nano Developer kit, а в качестве тачки — Remo Hobby S-Max — это то немногое, что осталось в беспилотнике по сей день.
Рабочий прототип из картона и макетных платЗатем машинка стала обрастать новыми компонентами: появились беспроводная сеть, лидар, IMU и остальные.
В процессе добавления я осваивал кучу нового:
ROS
Вспоминал/изучал C++
Учился работать с разными устройствами
Осваивал нейронные сети и машинное обучение
Узнавал про алгоритмы, специфичные для роботов и беспилотников
Паял, резал, клеил и всячески работал руками и головой
Когда картон и макетные платы стали слишком замедлять процесс — приобрёл недорогой, но большой 3D принтер, а провода спаял с нужными разъёмами.
Сперва спроектировал всё из картона и соплей (но с котиком)
Почти рабочий прототипА потом уже сделал корпус из пластика. В процессе пришлось освоить проектирование в CAD (использовал FreeCAD) и разобраться с настройкой принтера.
Потом писал алгоритмы, исправлял баги и добавлял датчики.
Что получилось
Платформа, для которой вы можете писать различные алгоритмы по исследованию, картографированию, распознаванию и другие — датчиков для этого хватает, а код можно писать на питоне прямо в браузере.
Тут есть:
камера (ночного видения), чтобы смотреть и распознавать объекты
однолучевой лидар и лазерные датчики расстояния, чтобы строить карту стен и других препятствий
управление машинкой, чтобы ехать, куда хочется
колёсная одометрия и IMU, чтобы понимать куда вы заехали
Уже есть несколько готовых скриптов (Jupyter notebook’ов):
чтобы просто поуправлять машинкой с джойстика, глядя при этом на картинку с камеры и на вид сверху, построенный по лидару
беспилотный режим: машинка сама исследует помещение, строит его карту и ищет
жертвуживность (людей, кошек и собак), а, найдя такой объект, — следует за ним
Я потратил много времени и оттоптал много разных граблей и велосипедов, и теперь хочется поделиться своим опытом и наработками с сообществом.
Что требуется (список компонентов)
RC машинка Remo Hobby Smax 1:16 Rh2635
Контроллер мотора, у меня такой: SURPASS HOBBY KK 35A ESC Waterproof Electric Speed Controller for 1/16 RC Car Brushless Motor Power system
Одноплатный компьютер Nvidia Jetson Nano Developer Kit
Микро SD карта на 64 GB (возможно, влезет и на 32)
wi-fi карточка типа такой и пара антен с IPEX разъёмом (USB свистки с wi-fi показали себя очень плохо)
Два датчика Холла типа KY-003 для Arduino
магнит примерно такого размера: 20x3x2 мм
камера, работающая с Jetson Nano; у меня IMX219 8MP Infrared Night Vision 160 Degree FOV + 2 Infrared LED Lights
система питания для jetson’а типа T208 или T200 на 18650 акумуляторах и сами аккумуляторы или повербанк (но тут нужно брать с хорошим током и нужно будет stl модельку для корпуса под него исправить)
однолучевой лидар типа YDLIDAR X2L
IMU типа Bosh BNO055
ШИМ плата PCA9685 для соединения контроллера двигателя и Jetson’а
Конвертер логических уровней для преобразования из 5V в 3.
 3V и обратно
3V и обратнокороткий USB — USB-C дата кабель (чтобы заменить слишком длинный кабель от лидара)
(опционально) два датчика расстояния; у меня VL53L0X (6 pin)
доступ к 3D принтеру
провода, коннекторы, стяжки, инструменты и т.д.
руки, которые смогут всё это соединить
Более подробно и со ссылками есть на github проекта.
Как собрать
Сделал туториал по сборке в виде нескольких видео.
Там же видео проездов и обсуждение задач и проблем.
Часть 1. Рассказываю, что и зачем делаю, соединяю основные компоненты.
Часть 2. Паяю, соединяю компоненты проводами.
Часть 3. Гоняю, рассказываю про софт и алгоритмы.
Часть 4. Запускаю два беспилотника вместе; добавляю лазерные сенсоры, чтобы они друг друга видели
Ссылки
Код, STL модели для печати, описание и ссылки есть на github проекта.
Видео есть на моём канале, там же будут выходить новые серии.
Обсуждение этого и других интересных проектов роботов и беспилотников в telegram канале.
Что дальше
Буду дорабатывать алгоритмы:
дотюню/улучшу текущие
добавлю лидарную одометрию (ранее не успел допилить NDT, а теперь можно будет доделать)
добавлю салки/прятки с кошкой
другие алгоритмы исследования и детекции
Добавлю манипулятор, чтобы можно было собирать с пола игрушки в ящик.
Попробую другие датчики для колёсной одметрии: магнитный датчик угла.
Как построить дрон | Пошаговые инструкции
Итак, вы хотите построить свой собственный дрон, а не покупать его. Не бойся; мы создали руководство, которое проведет вас через все, что вам нужно, и каждый шаг, который вам нужно сделать, чтобы построить свой дрон и поднять его в воздух.
Прежде всего, вот подробный список всего, что вам нужно для начала работы.
Если вас больше интересуют дроны с видом от первого лица, ознакомьтесь с нашим руководством по сборке собственного дрона с видом от первого лица.
Необходимые предметы для создания собственного дрона
Рама:
Рама — это основа вашего дрона. У вас есть возможность либо построить его самостоятельно, либо купить раму у продавца.
Рама также имеет решающее значение для размеров вашего дрона; количество рычагов у вашей рамы будет определять, сколько моторов вам понадобится. Quadcopter, беспилотники с четырьмя двигателями, безусловно, самые популярные.
Другое измерение вашего дрона — размер; размеры рамы указывают самое дальнее расстояние, на котором два двигателя находятся друг от друга.
Двигатели:
Двигатели дронов делятся на два основных типа: щеточные и бесщеточные. Мы рекомендуем бесщеточные двигатели.
Несмотря на то, что они более дорогие, они также служат дольше, имеют меньше поломок и потребляют меньше энергии, а значит, больше времени в эфире.
ESC или электронный регулятор скорости:
Неотъемлемая часть вашего дрона, так как он подает электроэнергию от аккумулятора к вашим двигателям. Вам понадобится по одному для каждого двигателя вашего дрона.
Вам понадобится по одному для каждого двигателя вашего дрона.
Пропеллеры:
При покупке пропеллеров вам нужно найти те, которые подходят к раме и двигателям вашего дрона.
Когда вы создаете свой собственный дрон, вы должны убедиться, что все работает вместе.
Распределительный щит:
Здесь подключаются основные электрические компоненты. Аккумулятор прикреплен к плате распределения питания, откуда электродвигатели и регуляторы получают питание.
Разъемы:
Разъемы необходимы для сварки двигателей и ESC друг с другом и с распределительным щитом.
Контроллер полета:
Контроллер полета — это аппаратный узел вашего дрона. Здесь вы подключаете такие вещи, как ESC, вход RC, GPS, телеметрия и многие другие компоненты, которые вы можете подключить к своему дрону. По сути, это мозг вашего дрона.
Обычно они оснащены гироскопом и акселерометром, которые автоматически помогают балансировать дрон.
Полетные контроллеры управляются своей прошивкой, которая может быть либо с закрытым исходным кодом, где вы не можете видеть код или вносить изменения, либо с открытым исходным кодом, где вы можете вносить свои модификации.
Аккумуляторы:
При покупке аккумуляторов необходимо снова учитывать емкость и тип аккумулятора, чтобы он подходил для вашего дрона. Наиболее часто используемыми аккумуляторами являются аккумуляторы Li-Po.
Монитор батареи:
Монитор батареи не является предметом первой необходимости. Тем не менее, это очень полезно, поскольку позволяет узнать, сколько сока у вас осталось.
RC Controller:
Используется пилотом дрона для управления дроном.
Приемник RC:
Принимает входные данные, когда вы или кто-либо еще использует контроллер.
Монтажная площадка:
Снижает вибрации и, следовательно, улучшает полет. Это удобно при съемке видео.
Подвес:
Подвес — это система поддержки вашей камеры. Он удерживает вашу камеру под одним и тем же углом, независимо от движения, и уменьшает вибрации. Это важно, если вы хотите превратить свои кадры из любительских в профессиональные.
Камера:
Необходима для записи видео. Лучшие камеры дронов могут снимать в качестве 4K.
USB-ключ/карта Micro SD:
Если вы используете камеру, вам нужно где-то хранить отснятый материал.
Далее! Теперь у вас есть все детали, давайте посмотрим, как собрать собственный дрон.
9 простых шагов: сборка дрона
Шаг 1: Соберите раму.
Если вы делаете раму самостоятельно, вам необходимо ее собрать. В зависимости от того, насколько прочным должен быть ваш дрон, вы можете использовать различные материалы, такие как металл, пластик или дерево.
Ваша рама должна иметь форму буквы X, и каждый пропеллер должен располагаться в каждой точке этой буквы.
Шаг 2: Соберите двигатели и пропеллеры для вашего дрона.
Если вы собираете раму, вам нужно будет сделать отверстия для двигателей и прикрепить их к раме.
Если у вас есть готовая рама, вы можете обнаружить, что она поставляется с креплениями для ваших двигателей.
Шаг 3: Установите электронные регуляторы скорости.

Когда вы прикрепите двигатели, вам нужно будет подключить регуляторы скорости к нижней части рамы вашего дрона.
Шаг 4: Подсоедините разъем аккумулятора к PDB.
Прикрепите PDB к нижней части дрона и подключите разъемы аккумулятора.
Шаг 5: Прикрепите шасси.
На дроне должно быть шасси, чтобы поглощать удары при приземлении на твердую поверхность.
Сделайте посадочный материал из чего-то твердого и гибкого, так как это поможет вам не повредить дрон при его установке.
Шаг 6: Выберите и добавьте свой полетный контроллер.
Установите контроллер полета на свой дрон. Убедитесь, что вы добавили губку или какой-нибудь мягкий материал под контроллер, чтобы уменьшить вибрации.
Тогда ваш дрон должен быть в состоянии оставаться стабильным в воздухе и чувствовать сдвиги и изменения ветра.
Шаг 7: Подключите дрон к GCS и откалибруйте датчики.
Убедитесь, что все работает правильно. Вы можете проверить это, используя GCS и откалибровав различные датчики на вашем дроне.
Шаг 8. Перепроверьте и протестируйте.
Проверьте и перепроверьте, все ли работает и откалибровано. Выберите безопасное место, медленно увеличьте скорость своего дрона и летите на малой высоте в первый раз, когда вы тестируете свой дрон.
Шаг 9: Подготовьтесь к взлету.
Теперь осталось только выяснить, где вам разрешено летать на вашем дроне, и убедиться, что все в порядке, прежде чем отправляться туда и управлять своим новеньким дроном.
Арендуйте или подпишитесь на свой следующий дрон
Теперь вы знаете, как собрать дрон и подготовить его к полету, но если вы только начинаете, как насчет аренды или подписки на ваш следующий дрон?
Вам не нужно беспокоиться о значительных инвестициях и иметь точные технические знания в области пайки и калибровки. Просто рискните и попробуйте дрон.
А если в вашем арсенале снаряжения еще не все, ознакомьтесь с необходимой камерой здесь.
Часто задаваемые вопросы о том, как собрать дрон
Как собрать дрон с нуля?
Чтобы собрать дрон, нужно подобрать нужные детали и соединить их в свой собственный дрон.
Трудно ли построить дронов?
Создание дрона требует некоторых технических знаний.
Дорого ли построить собственный дрон?
Создание дрона требует правильных деталей и может потребовать значительных инвестиций, а также зависит от того, сколько вы хотите и можете сделать сами.
Арендуйте дрон у местных создателей.
Сэкономьте до 40%.
Включено глобальное покрытие.
Пробная аренда
https://www.wedio.com/en/drones
10 €
Аренда для владения
20 €
https://images.wedio.com/images/listing_images/images/1949796/300×215/rent-dji-mavic-mini-on-wedio.jpg
https://www.wedio.com/en/drones
https://images.wedio.com/images/listing_images/images/1915165/300×215/lej_mavic_2_pro_med_pilot_p__wedio.jpg
https://www.wedio.com/en/dji-mavic-2-pro
https://images.wedio.com/images/listing_images/images/1915115151515151515151515151515151515151515151515151515151515151515 года. lej_mavic_2_pro_med_pilot_p__wedio.jpg
lej_mavic_2_pro_med_pilot_p__wedio.jpg
https://www.wedio.com/en/drones
https://images.wedio.com/images/listing_images/images/1934651/300×215/DSC05493-kopi.jpg
90 002 https:/ /www.wedio.com/en/dji-mavic-airПопулярные объявления об аренде
Как собрать собственный дрон
Если вы хотите отточить свои навыки робототехники, вы можете построить свой собственный дрон. Этот проект подходит для энтузиастов, которые хотят освоить новые навыки. Сборка дронов также является хорошим первым шагом для новичков, так как для завершения этого проекта вам не нужны дополнительные знания. Продолжайте читать это руководство, чтобы узнать несколько важных советов о том, как создать собственный дрон с нуля.
Читая эту статью, вы найдете материалы, которые вам понадобятся, а также пошаговое руководство по созданию собственного дрона. Вы также узнаете о нескольких способах заработать деньги с помощью новых навыков робототехники.
Найди свой учебный лагерь
- Career Karma подберет для тебя лучшие технологические учебные курсы
- Доступ к эксклюзивным стипендиям и подготовительным курсам
Разработка программного обеспеченияДизайнОбработка и анализ данныхАналитика данныхUX-дизайнКибербезопасностьИмя
Фамилия
Электронная почта
Номер телефона
Продолжая, вы соглашаетесь с нашими Условиями обслуживания и Политикой конфиденциальности, а также соглашаетесь получать предложения и возможности от Career Karma по телефону, текстовым сообщениям и электронной почте.
Почему вы должны построить свой собственный дрон
Если вы любитель или студент инженерного факультета, вам следует рассмотреть возможность создания собственного дрона, следуя основным шагам. Поскольку этот проект сочетает в себе аппаратное и программное обеспечение, он идеально подходит для отработки навыков программирования, базовой электроники, аналитических и творческих навыков. Дрон — одна из лучших идей инженерного проекта для студентов и людей, которым нравятся инновации и технологии.
Существует несколько типов дронов, и вы можете настроить свой проект в соответствии с вашими потребностями. Некоторые фотографы используют дроны для съемки с высоты птичьего полета. Коммерческие дроны могут использоваться в спасательных операциях для спасения жизней и помощи правоохранительным органам в наблюдении. Дроны стоят дорого, поэтому создание проекта «сделай сам» может сэкономить вам много денег, улучшая ваши технические навыки.
Насколько сложно собрать собственный дрон?
Чтобы собрать собственный дрон, вам нужно изучить основы электроники, такие как пайка проводов. Вы также должны уметь программировать прошивку. Однако все знания и навыки, необходимые для создания дрона, доступны онлайн. Это также требует настойчивости, целеустремленности и страсти. Вы можете построить свой собственный дрон, даже если у вас нет передовых технических навыков, но вы хотите учиться.
Вы также должны уметь программировать прошивку. Однако все знания и навыки, необходимые для создания дрона, доступны онлайн. Это также требует настойчивости, целеустремленности и страсти. Вы можете построить свой собственный дрон, даже если у вас нет передовых технических навыков, но вы хотите учиться.
Если вы новичок, вы можете сделать проект максимально простым. Вы можете попробовать сделать мини-дрон или изучить некоторые из различных комплектов дронов, доступных в Интернете, которые могут дать вам больше рекомендаций.
Сколько времени нужно, чтобы построить дрон?
Это может занять месяц или больше, в зависимости от некоторых факторов. Одним из них является доступность запчастей. Если вы новичок, вам также нужно будет потратить время на изучение, прежде чем создавать свой дрон.
Вы должны узнать о его механических компонентах, электрической системе и других аспектах, прежде чем принимать решение о конструкции вашего дрона. Благодаря учебным онлайн-ресурсам, таким как видеоуроки и онлайн-сообщества, теперь стало проще научиться собирать собственный дрон своими руками.
Сколько стоит построить собственный дрон?
Самодельные дроны могут стоить от 200 до 500 долларов. Это может отличаться в зависимости от компонентов, которые вы хотите включить в свой собственный дрон. Контроллер полета стоит от 70 до 100 долларов, а четыре бесколлекторных двигателя — от 30 до 60 долларов. Более продвинутый дрон с более сложными функциями также может быть дороже.
Насколько дешевле построить собственный дрон?
Готовые дроны, как правило, дороги, хотя их стоимость может варьироваться от менее 100 до более 10 000 долларов. Сумма, которую вы сэкономите, будет полностью зависеть от того, какие компоненты вы хотите включить в свой дрон. Увеличение мощности аккумулятора, повышенное качество видеопотока и дорогие инструменты увеличат ваши общие расходы.
Что нужно для создания собственного дрона?
Аппаратные компоненты, необходимые для создания собственного дрона, просты и часто недороги. Вы можете приобрести их на нескольких авторитетных веб-сайтах в Интернете. Перед покупкой этих компонентов убедитесь, что вы указали правильную стоимость и количество каждого из них.
Перед покупкой этих компонентов убедитесь, что вы указали правильную стоимость и количество каждого из них.
- Рама квадрокоптера. Это самый распространенный тип рамы дрона. Дрон-квадрокоптер — лучший вариант для недорогого проекта «сделай сам». Еще одним фактором, который следует учитывать, является размер. Размер рамы относится к диагональному расстоянию между двумя двигателями.
- Двигатели. В дронах используются двигатели двух основных типов: коллекторные и бесколлекторные. Коллекторный двигатель обычно дешевле, но бесколлекторный работает намного дольше и является лучшим выбором для самодельного дрона. В этом проекте вам нужно четыре бесколлекторных двигателя. Для продвинутого дрона предпочтительнее моторы с высоким КВ.
- Электронный регулятор скорости (ESC). ESC помогает контроллеру полета контролировать скорость двигателя. Для бесщеточных двигателей требуется ESC, который питается от постоянного напряжения.

- Пропеллеры. В этом проекте используются пропеллеры из углеродного волокна, но вы также можете использовать пластиковые пропеллеры. Они представлены четырехзначным числом, которое указывает размер реквизита.
- Липо-аккумулятор. Литий-полимерный аккумулятор будет источником питания. Вы должны убедиться, что емкость аккумулятора соответствует требованиям по напряжению двигателя.
- Контроллер полета. Он служит мозгом дрона. Прошивка управляет полетным контроллером. Он использует данные датчиков для управления движением дронов и моторов.
- Плата распределения питания (PDB). Используется для распределения питания на все компоненты дрона. Здесь крепятся Lipo батареи и ESC.
- Радиоконтроллер. RC состоит из передатчика и приемника. Передатчик подключен к полетному контроллеру.
- Плата Raspberry Pi. Здесь написана программа. Программа представляет собой набор инструкций, которые сообщают дрону, что и когда выполнять определенную команду.
 Есть множество проектов Raspberry Pi, которые вы можете сделать, если хотите еще больше улучшить свои навыки.
Есть множество проектов Raspberry Pi, которые вы можете сделать, если хотите еще больше улучшить свои навыки.
Создание дрона с нуля: пошаговое руководство
Создание собственного дрона — сложный, но очень полезный проект.Сборка беспилотника своими руками требует тщательного планирования и работы. Вы должны знать каждую деталь, чтобы ничего не упустить. Это шаги, необходимые для завершения всего проекта и создания собственного работающего дрона.
Создай свой дрон
Собери четырехъядерную раму своего дрона. Дроны-квадрокоптеры имеют форму буквы «X» с упорами на концах каждого рычага. Выберите материал, способный поддерживать конструкцию дрона, например пластик или металл.
Выбирайте лучшие компоненты
Выбор лучших компонентов — один из самых важных аспектов сборки дрона. Вы должны знать все характеристики ваших компонентов, такие как характеристики датчика и напряжение батареи.
Загрузите спецификацию для каждого компонента, чтобы узнать больше о его значениях и функциях. Вы можете купить эти аппаратные части в Интернете в таких магазинах, как Micro Center и Newegg, или вы также можете посетить веб-сайт Amazon.
Вы можете купить эти аппаратные части в Интернете в таких магазинах, как Micro Center и Newegg, или вы также можете посетить веб-сайт Amazon.
Создание программы
После того, как все аппаратные компоненты установлены, вы можете запрограммировать программу. Даже абсолютные новички могут научиться программировать Raspberry Pi. Он поддерживает широкий спектр языков программирования, которые просты в изучении и имеют множество онлайн-ресурсов. Программа, написанная на этом микрокомпьютере, скажет дрону выполнить определенную команду на основе входных данных.
Сборка и соединение
Для соединения всех деталей вам понадобится паяльник и провода. Подключите батареи и ESC к вашей PDB. Вкрутите моторы в каждую руку вашего дрона. Вы можете закрепить модуль RC с помощью липкой ленты. Контроллер полета и плата Raspberry Pi размещаются в середине вашего дрона.
Тестируйте и летайте
Когда все будет исправлено и ваш дрон готов к полету, вы можете проверить его работоспособность. Вы можете проверить движения дрона и убедиться, что все функции работают. Если вы правильно подключили все аппаратные компоненты и запрограммировали прошивку, дрон должен работать плавно и без ошибок.
Вы можете проверить движения дрона и убедиться, что все функции работают. Если вы правильно подключили все аппаратные компоненты и запрограммировали прошивку, дрон должен работать плавно и без ошибок.
Как заработать на своем дроне
Есть несколько способов заработать на создании дронов. Как только вы освоите этот проект, вы сможете использовать его для оказания услуг или продажи своих дронов. Вы можете использовать дроны для продажи привлекательных изображений, потому что это один из самых простых способов сделать снимок с воздуха. Вы можете загружать и продавать свои фотографии на таких сайтах, как Shutterstock.
Вы также можете использовать свои дроны для предоставления таких услуг, как фото- и видеосъемка на мероприятии. Дрон можно использовать для продвижения курортов, отелей и любого другого вида бизнеса. Вид с воздуха, который он захватывает, идеально подходит для съемки рекламных видеороликов или фотографий для брошюр и журналов.
Нужны ли вам навыки программирования, чтобы создать дрон?
Для создания дрона необходимы навыки программирования. Скорость, движение и управление двигателем дрона запрограммированы с помощью прошивки, также известной как низкоуровневое программирование. Наиболее популярными IDE, используемыми для программирования дронов, являются Arduino и Raspberry Pi. В этом проекте используется Raspberry Pi, который поддерживает Python, C и C++. Raspberry Pi — это микрокомпьютер, работающий под управлением операционной системы Linux.
Скорость, движение и управление двигателем дрона запрограммированы с помощью прошивки, также известной как низкоуровневое программирование. Наиболее популярными IDE, используемыми для программирования дронов, являются Arduino и Raspberry Pi. В этом проекте используется Raspberry Pi, который поддерживает Python, C и C++. Raspberry Pi — это микрокомпьютер, работающий под управлением операционной системы Linux.
Сможете ли вы научиться собирать дрон на курсах по программированию?
Вы можете научиться создавать дрон в учебном лагере по программированию. Учебные курсы обучают языкам программирования, обычно используемым при создании дронов, таким как программирование на Python и C. Некоторые буткемпы также предлагают программы для ОС Linux, которая является средой, используемой в этом проекте. Также доступны онлайн-курсы по Raspberry Pi, что является отличным способом приобрести навыки, необходимые для создания дрона.
Сбор отзывов, анализ и итерация
Любой, кто увлекается технологиями и любит строить, может построить дрон. Вам не нужно быть экспертом в программировании или электронике. Вы можете построить свой собственный дрон, если хотите учиться и изобретать что-то новое. В Интернете есть множество ресурсов, которые помогут вам научиться создавать дроны.
Вам не нужно быть экспертом в программировании или электронике. Вы можете построить свой собственный дрон, если хотите учиться и изобретать что-то новое. В Интернете есть множество ресурсов, которые помогут вам научиться создавать дроны.
Вы вкладываете не только свои деньги, но и свое время. Чтобы успешно построить свой собственный дрон, вы должны быть терпеливы. Поскольку технология — это постоянно развивающийся процесс, разработка дрона на этом не заканчивается. Вы по-прежнему можете улучшать и улучшать свой дрон, добавляя более эффективные функции и интересные функции.
Часто задаваемые вопросы о том, как собрать дрон
Сложно ли собрать дрон своими руками? Создание собственного дрона может показаться пугающим, но это может быть проще, чем вы думаете, учитывая столько информации, доступной в Интернете. Вам могут помочь несколько учебных пособий, и многие люди успешно создают свои собственные дроны, просто следуя инструкциям. Существуют также онлайн-сообщества, где вы можете задавать вопросы, если у вас возникнут проблемы при создании собственного дрона.