Как собрать робота-автомобиль на Arduino с нуля. Какие компоненты потребуются. Как подключить моторы и драйвер. Как запрограммировать движение робота. Какие датчики можно добавить для расширения функционала.
Необходимые компоненты для сборки робота-автомобиля на Arduino
Для создания базовой версии робота-автомобиля на Arduino понадобятся следующие компоненты:
- Плата Arduino Uno или совместимая
- Шасси автомобиля с двумя моторами
- Драйвер двигателей L298N
- Колеса (2 шт)
- Батарейный отсек на 4 AA батарейки
- Провода для подключения
- Отвертка и другие инструменты для сборки
Дополнительно можно приобрести различные датчики для расширения функционала робота, например:
- Ультразвуковой дальномер HC-SR04 для обнаружения препятствий
- ИК-датчики линии для движения по заданной траектории
- Энкодеры для измерения скорости вращения колес
Сборка шасси робота-автомобиля
Процесс сборки шасси робота-автомобиля включает следующие этапы:
- Прикрепить моторы к шасси с помощью винтов и гаек
- Установить колеса на валы моторов
- Закрепить Arduino и драйвер L298N на шасси
- Прикрепить батарейный отсек
- Соединить все компоненты проводами согласно схеме
При сборке важно надежно закрепить все детали, чтобы избежать их отсоединения во время движения робота. Также следует обеспечить свободное вращение колес.
Подключение компонентов робота-автомобиля
Схема подключения основных компонентов робота-автомобиля выглядит следующим образом:
- Моторы подключаются к выходам драйвера L298N
- Входы драйвера L298N соединяются с цифровыми пинами Arduino:
- IN1 — пин 5
- IN2 — пин 6
- IN3 — пин 9
- IN4 — пин 10
- Питание драйвера L298N подключается к батарейному отсеку
- Arduino питается от USB или от батарейного отсека через пин Vin
При подключении важно соблюдать полярность и не допускать короткого замыкания. Рекомендуется использовать разноцветные провода для удобства.
Программирование движения робота-автомобиля
Базовый скетч для управления движением робота-автомобиля на Arduino выглядит следующим образом:
«`cpp // Определение пинов для подключения драйвера моторов int in1 = 5; int in2 = 6; int in3 = 9; int in4 = 10; void setup() { // Настройка пинов как выходов pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); } void loop() { // Движение вперед digitalWrite(in1, HIGH); digitalWrite(in2, LOW); digitalWrite(in3, HIGH); digitalWrite(in4, LOW); delay(2000); // Остановка digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); delay(1000); // Поворот направо digitalWrite(in1, HIGH); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); delay(1000); // Остановка digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); delay(1000); } «`Расширение функционала робота-автомобиля
Для расширения возможностей робота-автомобиля можно добавить различные датчики и функции:
- Ультразвуковой дальномер для обнаружения препятствий и их объезда
- ИК-датчики линии для движения по заданной траектории
- Bluetooth-модуль для дистанционного управления со смартфона
- Сервопривод для поворота ультразвукового дальномера
- LCD-дисплей для отображения информации
Каждый из этих компонентов потребует дополнительного программирования и может значительно расширить функционал робота.
Отладка и тестирование робота-автомобиля
После сборки и программирования робота-автомобиля необходимо провести его тестирование и отладку:
- Проверить правильность всех соединений
- Убедиться, что батареи заряжены
- Загрузить скетч в Arduino и запустить робота
- Проверить работу всех функций движения
- При необходимости откалибровать датчики
- Устранить возможные проблемы с балансировкой или трением
В процессе отладки может потребоваться корректировка программы или механической части робота для достижения оптимальной работы.
Возможные проблемы при создании робота-автомобиля и их решения
При сборке и программировании робота-автомобиля могут возникнуть следующие проблемы:
- Робот не двигается:
- Проверить подключение и заряд батарей
- Убедиться в правильности подключения моторов к драйверу
- Проверить корректность программного кода
- Робот движется неравномерно:
- Проверить балансировку робота
- Убедиться в одинаковой мощности моторов
- Откалибровать скорость вращения колес в программе
- Датчики работают некорректно:
- Проверить правильность подключения
- Откалибровать датчики программно
- Убедиться в отсутствии помех от других компонентов
Большинство проблем решается путем тщательной проверки соединений и корректировки программного кода.
Дальнейшие направления развития проекта робота-автомобиля
После создания базовой версии робота-автомобиля можно рассмотреть следующие направления для его усовершенствования:
- Добавление камеры и алгоритмов компьютерного зрения для навигации
- Создание группы взаимодействующих роботов
- Интеграция с облачными сервисами для удаленного управления и мониторинга
- Добавление манипулятора для выполнения различных задач
- Реализация алгоритмов машинного обучения для автономного поведения
Каждое из этих направлений открывает новые возможности для экспериментов и обучения в области робототехники.
Заключение
Создание робота-автомобиля на Arduino — увлекательный проект, который позволяет на практике изучить основы робототехники, электроники и программирования. Начав с простой модели, вы можете постепенно усложнять конструкцию и функционал робота, добавляя новые компоненты и возможности. Это отличная платформа для экспериментов и развития навыков в области технического творчества.
Робот-художник на Arduino||Arduino-diy.com
Данный проект рассчитан на начинающих ардуинщиков и даст хорошую базу для дальнейшего освоения Arduino, Matlab, программирования и механики.
Электроники в проекте немного. Робот представляет из себя манипулятор с 2-мя степенями свободы, в качестве рабочего органа у которого используется карандаш. В проекте решена обратная задача кинематики и задача определение положения рабочего органа в плоскости в зависимости от углов поворота сервоприводов.
Необходимые элементы
- Механика
- Mechanix kit — железный конструктор
- Болты и гайки
- Держатель для карандаша (в данном случае — прищепка)
- 2 колеса для опор
- Электроника
- Плата Arduino uno
- Макетная плата
- Источник питания (адаптер на 5 вольт 2 ампера)
- USB Кабель
- Двигатели
- 3 серводвигателя
- Инструменты
- Отвертка
- Ключ
- Дрель
- Программное обеспечение
- Matlab (с установленным Arduino IO)
- Половина из перечисленного выше у вас вполне может найтись дома.
 Остальное можно приобрести за небольшие деньги.
Остальное можно приобрести за небольшие деньги. - Можно использовать любые серводвигатели с крутящим моментом более 7 кг*см (например, дешевый и сердитый вариант вроде MG995). Да, кстати, для любителей макеток — вам, конечно же пригодятся коннекторы.
 Остальное можно приобрести за небольшие деньги.
Остальное можно приобрести за небольшие деньги.Разработка механической части
На рисунках сверху приведена исчерпывающая информация о механической части манипулятора и его сборке. В общем-то, при наличии конструктора, возвращаемся на уровень 5-6 лет и собираем все это вместе. Теперь пошагово.
- Просверлите два отверстия в качалках от привода. При этом необходимо выдержать расстояние, приведенное на рисунке.
- Следующая наша задача — сделать крепеж для основания с приводом. Просверлите 4 отверстия на расстоянии, равном расстоянию между винтами привода и установите его на основание. Мы используем этот привод в качестве неподвижного основания для нашей механической руки.
- Прикрепите алюминиевые звенья из конструктора к качалкам приводов.
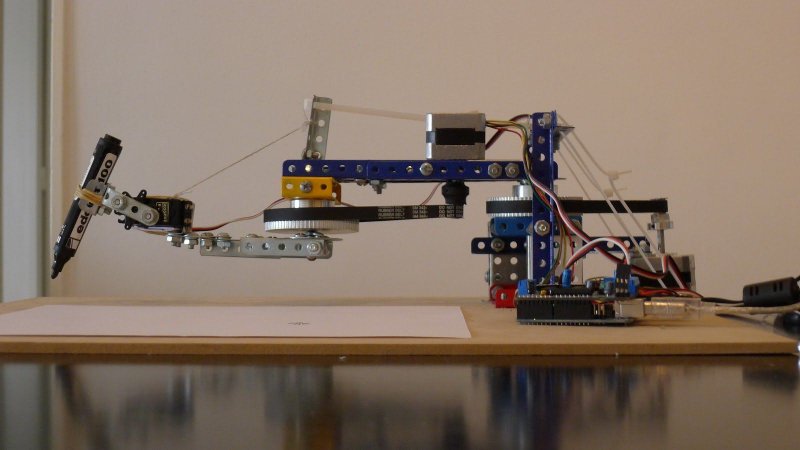 Желательно, чтобы расстояние между двумя качалками примерно было равно 20 сантиметрам.
Желательно, чтобы расстояние между двумя качалками примерно было равно 20 сантиметрам. - Прикрепите качалку к неподвижному сервоприводу основания, вторую качалку — ко второму приводу. Перед фиксацией качалок, откалибруйте сервопривода. Установите их таким образом, чтобы положение вала соответствовало 90 градусам, серводвигатель у основания был установлен параллельно звеньям, а серводвигатель на свободном конце — перпендикулярно.
- После этого возьмите еще звенья из конструктора и прикрепите их параллельно к свободному концу и серве.
- Прикрепите колеса к нижней части механической руки для балансировки и обеспечения поддержки нашей конструкции
- Последний серводвигатель должен быть подключен к концу второго звена из 5 пункта.
Подберите подходящую прищепку (или другой схват) и прикрепите ее к серве так, чтобы расстояние от второй сервы до рабочего органа составляло около 20 сантиметров.
При разработке механической части важно выдерживать указанные расстояния — 20, 15 сантиметров и правильно проводить калибровку двигателей.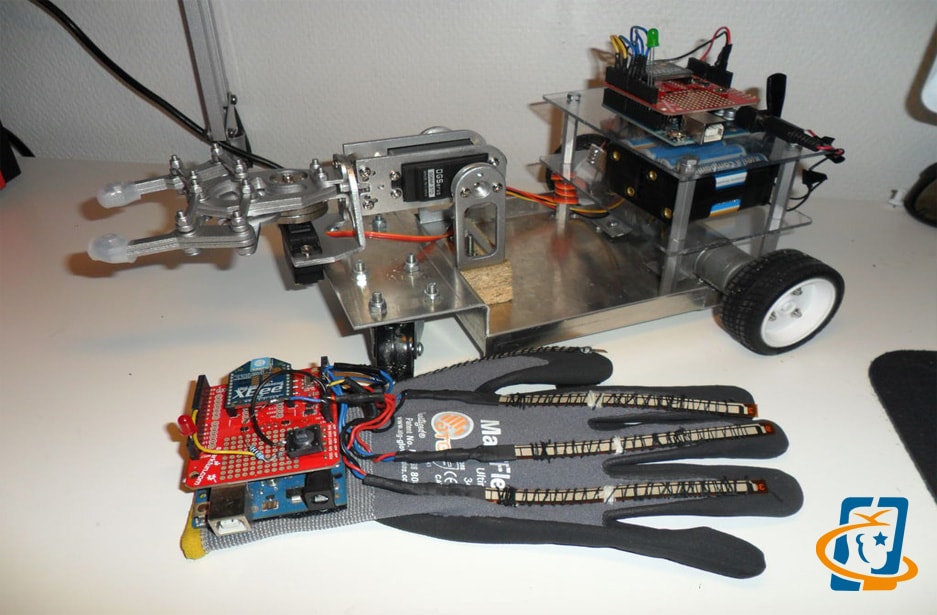 Естественно, доработка конструкции возможна и зависит того, какие именно узлы у вас еще есть в наличии. Например, вместо алюминиевых звеньев из набора конструктора можно использовать обычные линейки, куски пластика и т.п.
Естественно, доработка конструкции возможна и зависит того, какие именно узлы у вас еще есть в наличии. Например, вместо алюминиевых звеньев из набора конструктора можно использовать обычные линейки, куски пластика и т.п.
Электрическая часть проекта
На рисунке сверху приведена схема подключения платы Arduino. Можно использовать макетную плату, можно распаять шилд, на ваше усмотрение.
Программирование платы Arduino для манипулятора
Эта часть проекта самая интересная и, наверное, самая важная.
Давайте вкратце разберемся, что именно происходит в программной части.
Сначала мы берем изображение и находим его границы. После начинаем рисовать. Процесс рисования состоит из двух частей.
Часть первая. Сначала мы находим пиксель, который соответствует 1, так как наш рисунок теперь представлен в виде 0 и 1. Проходит проверка того, не являются ли пиксели рядом тоже 1, после чего ручка перемещается на выбранный пиксель и удаляет предыдущую 1. Функция повторяется по кругу и позволяет создавать плавные линии.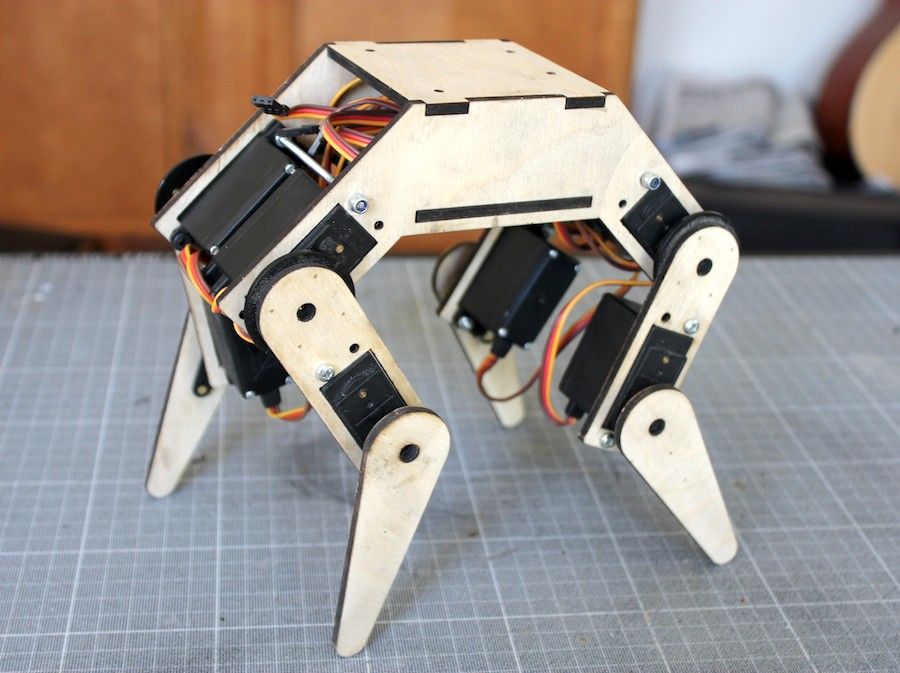
Вторая часть. Решение обратной задачи кинематики для перемещения рабочего органа к определенному пикселю. При расчете берутся координаты пикселя и вычисляются соответствующие углы приводов. Как именно решается эта задача можно увидеть на рисунке выше.
Теперь перейдем к настройке Matlab и Arduino для отрабатывания кода.
Для начала установите Arduino IO плагин в Matlab.
После этого замените файл arduino.m тем, что прикреплен к проекту под тем же именем.
Скачайте и сохраните finaldraw.m и draw.m в директорию с матлабом.
Загрузите файл adioes.ino на плату Arduino.
Проверьте, к какому порту подключена ваша плата Arduino, после чего откройте finaldraw.m и измените COM3 на ваш порт.
Измените расширение рисунка, который вы хотите нарисовать на .png. Это можно сделать с посощью большинстве графических редакторов. Сохраните полученный файл в директорию с Matlab. Откройте finaldraw.m и измените emma.png на название вашего рисунка с рисширением .png. Схраните файл emma.png.
Схраните файл emma.png.
По молчанию в проекте загружена фотография Эммы Уотсон, которую вы можете использовать для тестирования. Конечно же, вы можете настроить параметры определения положения рабочего органа в соответствии с вашими габаритами конструкции.
На этом все. Подключите вашу плату Arduino к персональному компьютеру, пропишите в командной строке Matlab слово finaldraw и играйтесь.
finaldraw.m — 735 bytes
draw.m 1 KB
arduino.m 96 KB
adioes.ino 25 KB
Программирование продолжается
Алгоритм работы нашего манипулятора достаточно простой. Давайте немного разберемся в этом вопросе.
Сначала мы конвертируем изображение, которое хотим нарисовать в формат png и сохраняем его в папке с Matlab. После этого наш алгоритм преобразовывает рисунок в формат ч/б пикселей, как это показано на рисунке выше. Самая интересная часть — это прорисовка полученных пикселей.
Начинается проверка пикселей конвертированного рисунка. Когда находится 1, которая соответствует белому пикселю на рисунке, рабочий орган перемещается в это положение и опускает ручку. После этого проверяются ближайшие 8 пикселей и, если находится хоть один, ручка перемещается на него, не отрываясь от плоскости. При этом предыдущий пиксель заменяется на 0, чтобы избежать повторов. Таким образом продолжается работа, пока не исчезнут все 1. После этого, рабочий орган перемещается в новое положение проверяет новый массив пикселей. Данный алгоритм позволяет постепенно воспроизвести весь рисунок.
После этого проверяются ближайшие 8 пикселей и, если находится хоть один, ручка перемещается на него, не отрываясь от плоскости. При этом предыдущий пиксель заменяется на 0, чтобы избежать повторов. Таким образом продолжается работа, пока не исчезнут все 1. После этого, рабочий орган перемещается в новое положение проверяет новый массив пикселей. Данный алгоритм позволяет постепенно воспроизвести весь рисунок.
Результат всех приведенных выше пунктов приведен на видео ниже:
CARduino – самодельный робот на Arduino « схемопедия
Как понятно из названия, это робот на контроллере Arduino UNO. К нему разработаны собственные библиотеки для простого и удобного использования. В обычной комплектации робот содержит два двигателя, два колеса и дальномер, установленный на передней панели.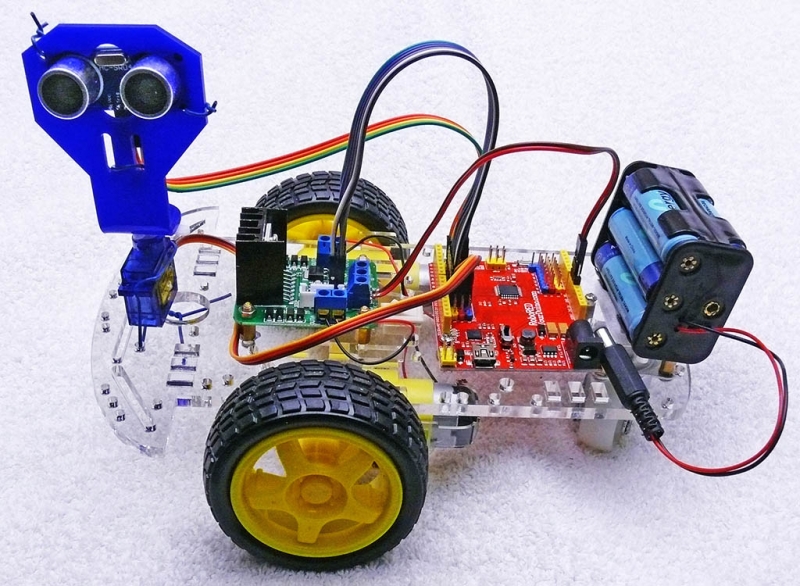 Также сверху на нём есть макетная плата для добавления разнообразных устройств на ваше усмотрение. Он работает и управляется автономно, однако к нему можно добавить радиоуправление. В этой статье описана работа с ним и библиотеками и есть несколько примеров.
Также сверху на нём есть макетная плата для добавления разнообразных устройств на ваше усмотрение. Он работает и управляется автономно, однако к нему можно добавить радиоуправление. В этой статье описана работа с ним и библиотеками и есть несколько примеров.
Что такое библиотека?
Библиотека облегчает управление CARduino. Этот проект рассчитан на людей с небольшим опытом в программировании, которые хотят делать простых роботов. Вам даже не нужно знать, как управлять мотором. Библиотека сводит программу до простых команд «Повернуть направо и проехать 1 секунду» или «Ехать вперед 3 секунды, а затем ускориться». Библиотека также содержит примеры программ, которые помогут вам. Более подробная информация о библиотеке содержится в конце статьи.
Если у меня нет таких же материалов, я могу использовать другие?
Конечно, вы можете собирать робота как вам угодно. Библиотека будет работать практически независимо от сборки. Например, вы можете использовать другой материал для шасси. Я использовал дерево, потому что смог найти только его.
Например, вы можете использовать другой материал для шасси. Я использовал дерево, потому что смог найти только его.
Что может сделать робот?
Он может делать все что угодно. Даже без дополнительных устройств его возможности практически не ограничены. При помощи библиотеки CARduino, писать программу для Arduino очень легко. Дополнительная макетная плата позволяет добавлять разнообразные датчики.
Какая стоимость робота?
Если собирать его с нуля, то около 100$. У меня были почти все части, поэтому он обошелся мне примерно в 30$. Все компоненты достаточно распространены и должны у вас быть.
Детали
1х Arduino Uno.
1х Макетная плата.
1х Разъёмы для Arduino и макетной платы.
1х Дальномер Sharp.
2х Микро мотора.
Пара колес 49×19мм.
Пара кронштейнов для двигателя.
Пара шариковых колёс .
Драйвер моторов для Arduino.
1х Кусок дерева 15×10. 75 см.
75 см.
12х Шурупов.
1х 9В батарея
Подготовка шасси робота
Перед началом сборки необходимо вырезать кусок дерева необходимых размеров, прикрепить шариковые колёса как описано ниже, прикрепить основные колёса, установит макетную плату и Arduino на основу.
Установка шариковых колёс
Установите оба колеса сзади, с обеих сторон. Отметить места, на которые попадают их крепёжные отверстия и просверлите их. Используйте шурупы для крепления.
Установка моторчиков
Это довольно просто. Все, что вам нужно сделать – это вставить двигатели в кронштейн и прикрепить их на углах доски. Вы можете припаять провода к ним. Не перепутайте положительные и отрицательные контакты.
Установка Arduino и макетной платы
Вы должны начать с центрирования Arduino и макетной платы на шасси. Отметьте отверстия держателя и просверлите их. Потом прикрепите основу с макетной платой и Arduino шурупами.
Установка датчика
Расположите датчик спереди и посередине, отметьте крепёжные отверстия и просверлите их. Вы должны использовать отверстия на обоих сторонах датчика. Используйте шурупы для крепежа. Убедитесь, что при установке JST выводы находится вверху. Вставьте JST провода в датчик.
Вы должны использовать отверстия на обоих сторонах датчика. Используйте шурупы для крепежа. Убедитесь, что при установке JST выводы находится вверху. Вставьте JST провода в датчик.
Красный провод присоедините к + макетной платы, черный к GND, а желтый в любую другую точку. После этого подключите драйвер моторов к Arduino.
Подключение двигателей колес к драйверу
Подключите положительный контакт правого двигателя к отрицательному контакту А драйвера.
Подключите отрицательный контакт правого двигателя к отрицательному контакту А драйвера.
Подключите положительный контакт левого двигателя к отрицательному контакту В драйвера.
Подключите отрицательный контакт левого двигателя к отрицательному контакту В драйвера.
Подключение питания и датчика
Подключите 5В к + макетной платы, а GND к GND макетной платы. Желтый провод датчика подключите ко второму контакту АЦП.
Установка батареи
Просто приклейте её супер клеем на задней панели CARduino.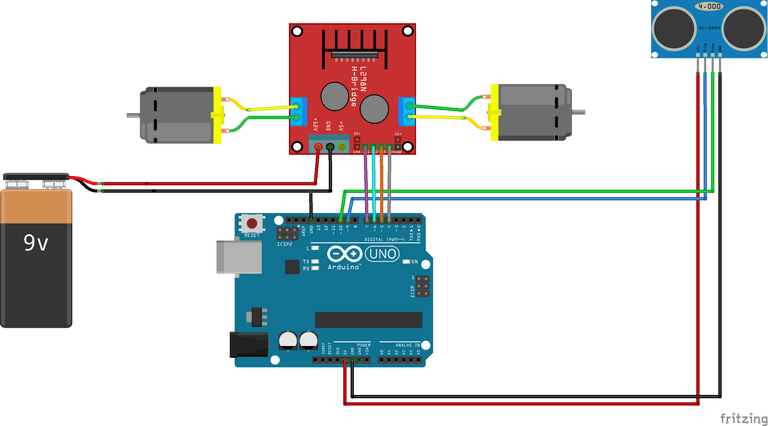 Затем присоедините + и GND к + и GND Carduino.
Затем присоедините + и GND к + и GND Carduino.
Вы закончили сборку робота! На нем без изменений будет работать библиотека и тестовые программы. Подробнее о этом написано ниже.
Библиотека
Для установки библиотеки скачайте Carduino.zip ниже. Найдите / arduino-1.0/libraries. Извлеките содержимое архива в эту папку.. Чтобы использовать её, откройте Arduino IDE и последуйте по пути -> import library -> Carduino.
Значение функций:
void mycarduino.begin ()
Инициализация CARduino. Напишите эту команду в начале программы.
void mycarduino.goforward (время в секундах, скорость)
Эта функция перемещает CARduino вперед в течении указанного времени с указанной скоростью. Скорость может быть любым числом от 1 до 1023, 1023 – максимальная скорость.
void mycarduino.goback (время в секундах, скорость)
То же самое, только назад.
void mycarduino.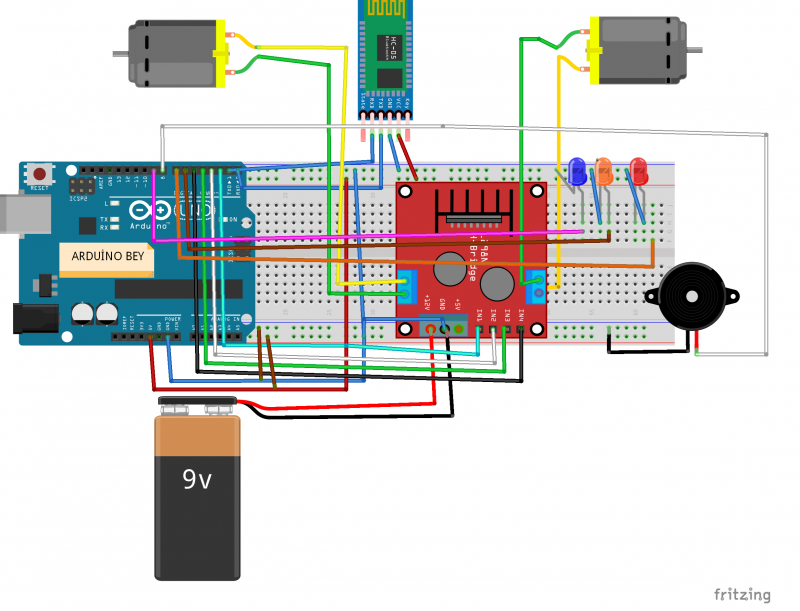 turnright (время)
turnright (время)
Поворот направо в течении указанного в времени(в миллисекундах).
void mycarduino.turnleft (время)
Тоже самое налево.
Int mycarduino.proximity
Возвращает значение с датчика в сантиметрах
Примеры:
Перейдите по адресу File -> Examples -> Carduino -> [имя на ваш вкус]
Blink – CARduino секунду двигается вперед, на секунду останавливается, секунду движется вперёд, и т.д.
Object Avoid – CARduino постоянно движется вперед, пока объект находится на расстоянии более 25 сантиметров. Затем он случайным образом выбирает сторону и поворачивает в неё на 800 или 2300 миллисекунд.
Cautious Driving – работает как предыдущая программа, но замечая объект на расстоянии 40 см замедляет скорость.
Вы полностью закончили проект!
Вот видео робота в действии (из-за проблем с дальномером он отключен, но робот работал):
Скачать исходный код программы и библиотеку
Оригинал статьи на английском языке (перевод: Александр Касьянов для сайта cxem. net)
net)
Категория: Аппаратура радиоуправления моделями
Метки: взято с сайта http://cxem.net
Arduino против Raspberry Pi для робототехники
Раскрытие информации: Некоторые ссылки ниже являются партнерскими ссылками. Это означает, что без каких-либо затрат для вас я буду получать партнерскую комиссию, если вы перейдете по ссылке и совершите покупку. Learn Robotics является участником партнерской программы Amazon Services LLC, партнерской рекламной программы, предназначенной для предоставления веб-сайтам возможности получать доход от рекламы за счет рекламы и ссылок на Amazon.com.
Какой контроллер следует использовать для вашего следующего проекта: Arduino или Raspberry Pi? Если вы изо всех сил пытаетесь определить, использовать ли Arduino или Raspberry Pi для робота, IoT или прототипа электроники, то вы попали в нужное место.
В этой статье я помогу вам разобраться, какой контроллер вам нужен. К концу этого поста вы должны быть на пути к созданию своего следующего проекта с помощью Arduino или Raspberry Pi.
Готовы начать?
Давайте сначала посмотрим на Arduino и Raspberry Pi.
Таблица сравнения Arduino и Raspberry Pi
Из таблицы видно, что Raspberry Pi имеет целый ряд дополнительных функций по сравнению с Arduino Uno. Эти функции могут потребоваться вашему проекту, а могут и не потребоваться.
Если вам не нужна операционная система и функции, которые может предложить Raspberry Pi, то Arduino Uno — более экономичный вариант. Однако, если вам нужна гибкость программирования на разных языках, то выбор Raspberry Pi имеет смысл.
| Arduino Uno
| Raspberry Pi 3 B+
| ||
|---|---|---|---|
| Цена | Имя бренд: $ 20 : <$ 15 | .0037 | |
| Operating System | None N/A | Linux-Based | |
| Processor | 8-bit microcontroller | 64-bit microprocessor | |
| RAM | 2 KB RAM | 1 ГБ ОЗУ | |
| Список характеристик | USB-B Штекер постоянного тока 20 контактов ввода/вывода на 40 мА Аналоговые входы Цифровой ввод/вывод | 7 Порт HDMI SD-карта Аудиоразъем Порт камеры CSI Порт дисплея DSI 4 порта USB 2. 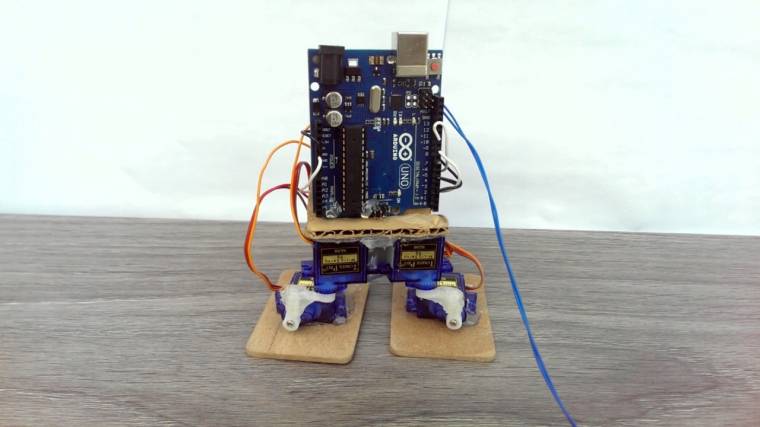 0 0 Разъем Gigabit Ethernet Беспроводная локальная сеть Bluetooth 4.2 8 контактов ввода-вывода при 16 мА | Потребляемая мощность |
| ~ 50 мА | ~ 700+ MA | ||
| Языки программирования | Limited C ++ / Arduino-C | Практически | .0034 Купить на Amazon |
Теперь давайте подробно рассмотрим как Arduino Uno, так и Raspberry Pi.
Arduino
Существует множество разновидностей плат Arduino и Arduino-совместимых плат (Nano, Mega, ESP8266 и т. д.). Однако в этой статье мы сосредоточимся конкретно на Arduino Uno.
Arduino Uno — это микроконтроллер на основе микрочипа ATmega328P, предназначенный для запуска одной программы на C++. Он имеет 20 контактов ввода/вывода: 6 аналоговых входов и 14 цифровых входов/выходов. Его легко создать, потому что он имеет встроенные разъемы и USB-порт для удобного программирования.
Преимущества Arduino
Помимо доступной стоимости, с Arduino Uno очень легко создавать прототипы. Все, что вам нужно сделать, это загрузить Arduino IDE, создать простую программу и загрузить ее на свою плату. Вам не нужно создавать низкоуровневый встроенный код. Это экономит время и делает быстрое прототипирование доступным для всех.
Кроме того, Arduino имеет низкое энергопотребление (~50 мА), что делает его лучшим выбором для портативных проектов с питанием от батареи.
Почему вы должны использовать Arduino
Вам следует использовать Arduino, если вы хотите создать прототип быстро и по доступной цене. Поскольку у Arduino небольшая кривая обучения, это отличная плата для начинающих, желающих программировать электронику и роботов.
С другой стороны, вы можете получить больше возможностей и вычислительной мощности, выбрав Raspberry Pi.
Raspberry Pi
Raspberry Pi — одноплатный компьютер, созданный Raspberry Pi Foundation.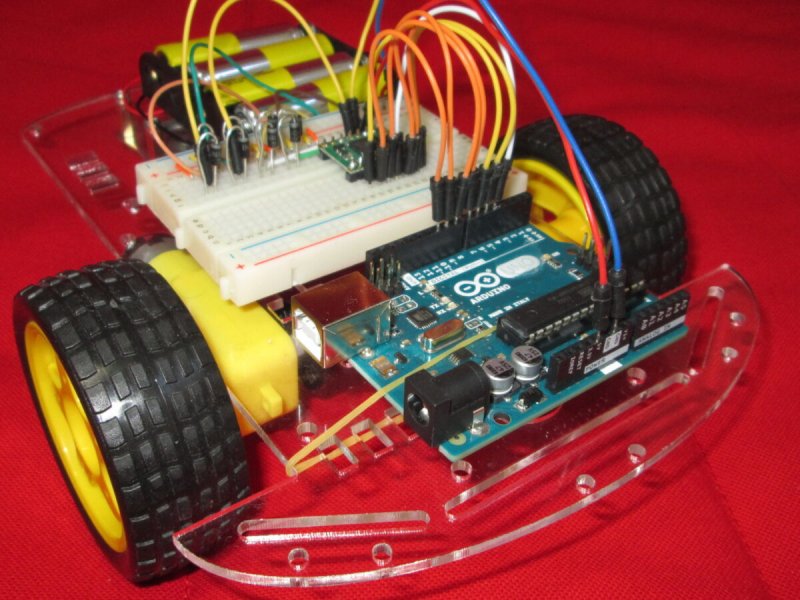 Он имеет множество функций, включая 4 USB-порта, встроенную локальную сеть, WiFi, Bluetooth, устройство чтения SD-карт, порт HDMI и многое другое! Он также имеет в полмиллиона раз больше оперативной памяти, чем Arduino Uno. Сумасшедший, да?!
Он имеет множество функций, включая 4 USB-порта, встроенную локальную сеть, WiFi, Bluetooth, устройство чтения SD-карт, порт HDMI и многое другое! Он также имеет в полмиллиона раз больше оперативной памяти, чем Arduino Uno. Сумасшедший, да?!
Преимущества Raspberry Pi
Одним из самых больших преимуществ Raspberry Pi является то, что это компьютер под управлением операционной системы на базе Linux. Это означает, что вы можете использовать Raspberry Pi так же, как настольный компьютер. Вы можете устанавливать программы, графические интерфейсы, просматривать веб-страницы и программировать на любом языке, который вам нравится. Это делает его превосходным вариантом для медиацентров, «умных» роботов и пользовательских систем домашней автоматизации.
Если вы хотите создать собственный киоск или изображение, вы можете сделать это с помощью Raspberry Pi. Это достаточно компактное устройство с достаточной мощностью для создания реальных систем.
Кроме того, теперь вы можете получить Raspberry Pi 4, который предлагает больше оперативной памяти, лучшую обработку и поддержку двух дисплеев 4K. Это законно.
Это законно.
Почему вы должны использовать Raspberry Pi
Вам следует использовать Raspberry Pi, если у вас есть проект, который слишком сложен для Arduino, или если у вас больше опыта создания систем поверх операционной системы. Я также рекомендую использовать Raspberry Pi, если вы производитель среднего уровня и хотите получить более продвинутые навыки робототехники. Raspberry Pi позволит вам разрабатывать алгоритмы распознавания лиц, запускать OpenCV, кодировать на Python и разрабатывать приложения в Node-RED. Вы не можете сделать это в Arduino.
Теперь давайте углубимся в цену Arduino и Raspberry Pi, их применение в робототехнике и какой контроллер лучше для Интернета вещей (IoT).
1. Цена Arduino и Raspberry Pi
Начнем с того, что подлинный Arduino стоит около 20 долларов, а клон — около 10-15 долларов. Raspberry Pi стоит около 40 долларов. Разница в цене на Raspberry Pi соответствует целому ряду других функций, включая операционную систему на базе Linux, в 500 000 раз больше оперативной памяти, видеовыход, вход для камеры и возможности подключения (LAN, Ethernet и Bluetooth).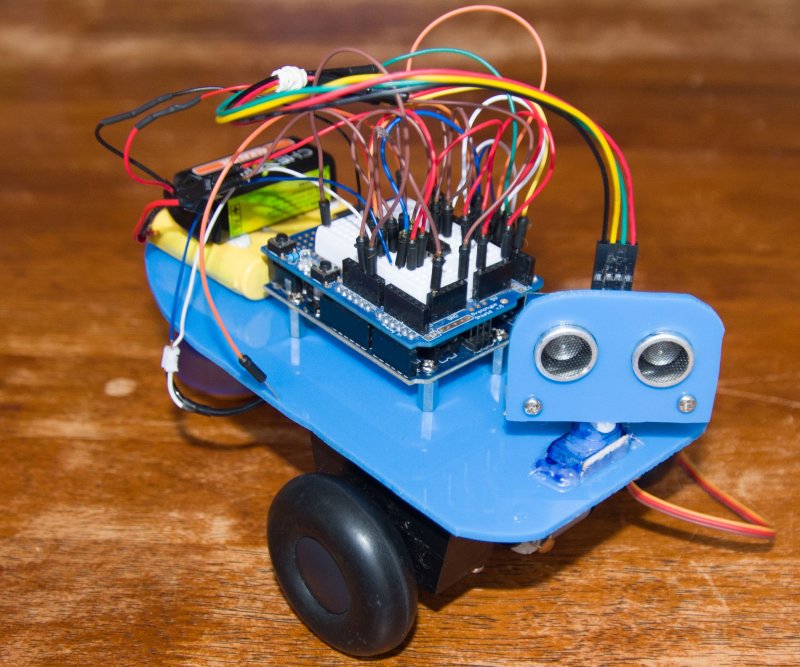
С другой стороны, у Arduino меньше возможностей обработки, но больше ввода-вывода, включая как аналоговые, так и цифровые входы и выходы, которые могут управлять током до 40 мА. Ценность обеих этих плат бесценна, потому что они обеспечивают бесшовный способ создания прототипов.
Прежде чем выбрать контроллер только по цене, подумайте, что вы собираетесь с ним делать. Хотя Arduino может показаться экономичным вариантом, вы будете ограничены одной программой, работающей на C++.
Теперь давайте рассмотрим некоторые приложения, использующие Arduino и Raspberry Pi для робототехники.
2. Arduino или Raspberry Pi для робототехники
Если вы пытаетесь решить, использовать ли Arduino или Raspberry Pi для робототехники, вам нужно сначала рассмотреть свой уровень программирования и способностей к электронике. Если вы на 100% новичок в робототехнике, то Arduino — это менее запутанный способ начать работу. Однако, если у вас есть опыт работы с Linux или Python, но вы новичок в робототехнике, Raspberry Pi может быть немного проще сначала попробовать.
Я разработал эту инфографику, чтобы помочь вам решить, нужна ли вам Arduino или Raspberry Pi для вашего робототехнического проекта.
Хотите эту диаграмму? Введите адрес электронной почты ниже, чтобы загрузить бесплатную копию в формате PDF!
Вот ваша загрузка!
Инфографика Arduino и Raspberry Pi (PDF)
Кроме того, если у вас нет опыта в робототехнике или программировании, Arduino — лучший вариант. Это меньше запутанный способ изучить части робота и то, как работают моторы и датчики. Освоив основы, вы сможете научиться проектировать более сложные системы с помощью Raspberry Pi.
Теперь, если вы начинаете с более продвинутого уровня, вы можете использовать Raspberry Pi, чтобы воспользоваться преимуществами программирования на различных языках, ROS, управления FPV и распознавания объектов с OpenCV. Есть гораздо больше библиотек и возможностей обработки, которые вы можете сделать с Raspberry Pi, которые вы не можете сделать с Arduino.
3. Arduino против Raspberry Pi для IoT
Проекты Интернета вещей (IoT) становятся все более популярными из-за тенденций домашней автоматизации. Если вы пытаетесь решить, использовать ли Arduino или Raspberry Pi для IoT, вам следует учитывать следующее: 9.0003
- Что вы пытаетесь сделать с устройством?
- Какие данные вы собираете?
- Какие действия вы предпримете с данными?
- Как вы будете питать свое устройство?
Если вы хотите создать устройство для измерения температуры, вам подойдет Arduino. Если вы хотите создать полноценную систему домашней автоматизации, вам понадобится Raspberry Pi. Важно выбрать контроллер в зависимости от того, сколько вводов-выводов вам потребуется, на каком языке вы хотите программировать и насколько сложна система.
Как правило, чем сложнее проект IoT, тем больше вероятность того, что вам понадобится Raspberry Pi в качестве главного контроллера. С другой стороны, если у вас есть простой или однопрограммный IoT-проект, то Arduino, вероятно, будет лучшим вариантом.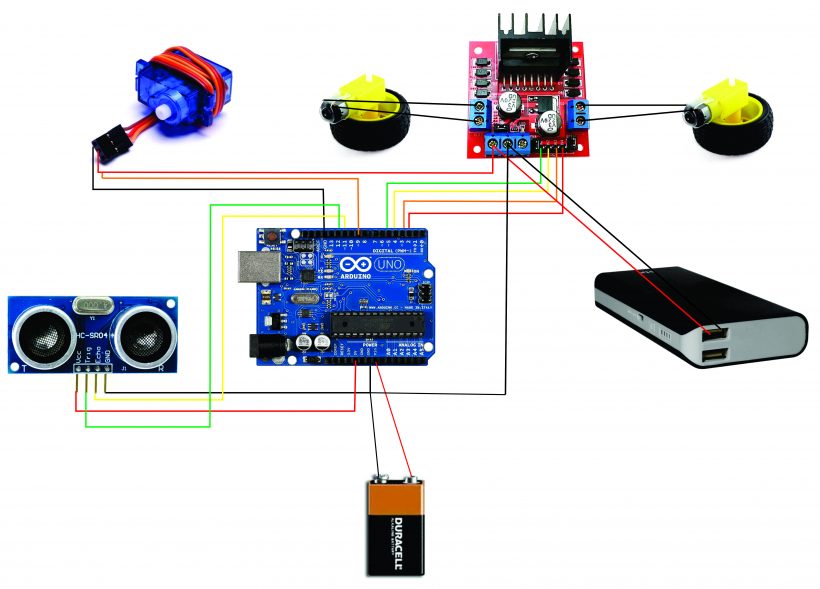 Вы не хотите выбирать контроллер, у которого слишком много или слишком мало опций или функций для того, что вы пытаетесь сделать.
Вы не хотите выбирать контроллер, у которого слишком много или слишком мало опций или функций для того, что вы пытаетесь сделать.
И победителем становится…
…барабанная дробь…пожалуйста…
Для начинающих и простых проектов – Arduino
В большинстве случаев вы захотите использовать Arduino. Я знаю, кто-то скажет, что вы можете использовать Raspberry Pi для простых проектов. И да, вы, безусловно, можете. Если все, что у вас есть, это Raspberry Pi, и вы хотите создать простое доказательство концепции, то, во что бы то ни стало, используйте то, что у вас есть.
Низкая цена и более короткая кривая обучения Arduino делают ее привлекательной для большинства начинающих и простых проектов. Вы не можете превзойти создание робота или научиться считывать показания датчиков менее чем за 30 долларов. Если вы учитель или студент, желающий заняться робототехникой, то я не могу рекомендовать Arduino в достаточной степени.
Для продвинутых учащихся и сложных проектов — Raspberry Pi
С другой стороны, если у вас есть более продвинутые навыки или у вас есть сложный проект, Raspberry Pi, вероятно, будет вашим лучшим выбором. Конечно, вы можете добавить щиты и аксессуары к Arduino; однако, если вам нужна возможность выполнять расширенную обработку или иметь подключение к Интернету, Raspberry Pi предоставляет эту возможность из коробки.
Конечно, вы можете добавить щиты и аксессуары к Arduino; однако, если вам нужна возможность выполнять расширенную обработку или иметь подключение к Интернету, Raspberry Pi предоставляет эту возможность из коробки.
Независимо от того, какой контроллер вы выберете, вам необходимо тщательно взвесить свои технические навыки в сравнении с масштабностью проекта, который вы делаете.
Примеры проектов для Arduino и Raspberry Pi
Наконец, если вам понравилась эта статья и вы хотите начать работу с Arduino или Raspberry Pi, вот несколько статей, которые я рекомендую прочитать дальше.
Учебники и проекты по Arduino
Вот несколько популярных руководств по Arduino:
- Четыре шага для написания любой программы для Arduino
- Простое руководство по Arduino
- Arduino для начинающих (курс)
Если вы ищете проекты для Arduino, попробуйте эти:
- 7 Погодная станция Arduino 6 робот Arduino с Bluetooth-клавиатурой
- Рабочая тетрадь по проектам Arduino (электронная книга)
Учебные пособия и проекты по Raspberry Pi
Вот несколько популярных учебных пособий по Raspberry Pi:
- Руководство по началу работы с Raspberry Pi
- Программирование GPIO на Raspberry Pi
- Безголовое программирование на Raspberry Pi
Если вы ищете проекты Raspberry Pi, попробуйте эти:
Программирование Raspberry Pi с помощью Node-REDКакой контроллер вы собираетесь использовать для своего следующего робототехнического проекта? Оставьте комментарий ниже, и дайте мне знать, что вы делаете!
Соберите роботизированную машину 2WD с помощью Arduino — codemahal
Учебники по Arduino Uno
🕑 Этот урок займет около 20 минут
В этом уроке вы узнаете, как использовать Arduino для сборки автомобиля-робота с полным приводом. Вы можете расширить этот проект, используя ультразвуковые датчики для обнаружения препятствий и их обхода, линейные датчики для отслеживания пути или датчики для измерения скорости вращения колес (для повышения точности при рулевом управлении или движении по прямой).
Вы можете расширить этот проект, используя ультразвуковые датчики для обнаружения препятствий и их обхода, линейные датчики для отслеживания пути или датчики для измерения скорости вращения колес (для повышения точности при рулевом управлении или движении по прямой).
Необходимые детали
Вот что вам понадобится:
-
1 плата Arduino Uno
-
1 комплект роботизированной машины 2WD (2 колеса, 2 двигателя и шасси) 920007 9003 90 Батарейки AA
-
1 x L298P Shield R3 DC Motor Shield
-
6 x проводов для подключения двигателей и аккумуляторов к моторному щиту (2 провода должны быть припаяны к каждому двигателю)
-
Программное обеспечение Arduino ID (бесплатно на http://www.arduino.cc)
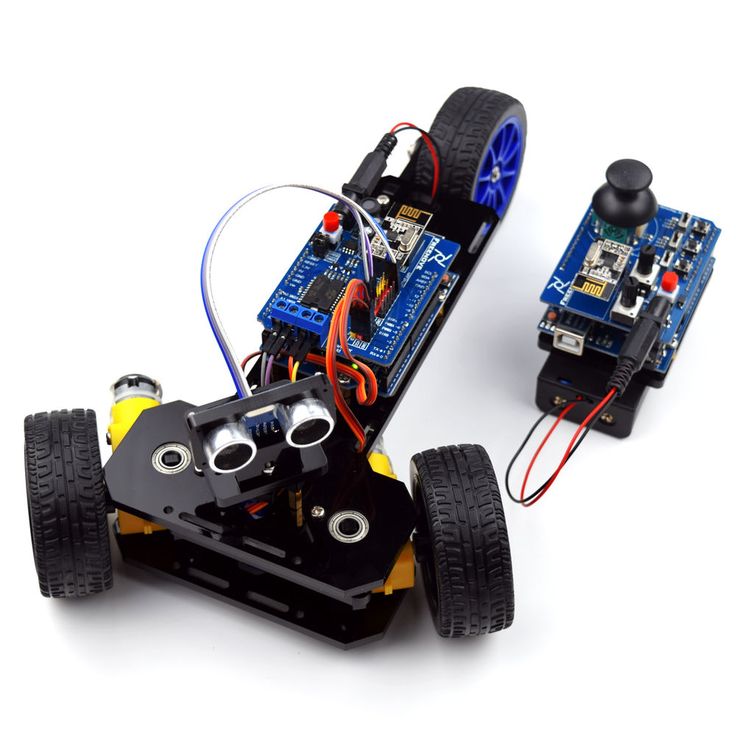
На трех изображениях ниже показаны автомобильный комплект 2WD перед сборкой, плата Arduino Uno, моторный щит L298P и собранный автомобиль.
Сборка автомобильного комплекта
Соберите все детали шасси, припаяйте два провода к двигателям постоянного тока и прикрепите двигатели к колесам (если они еще не собраны).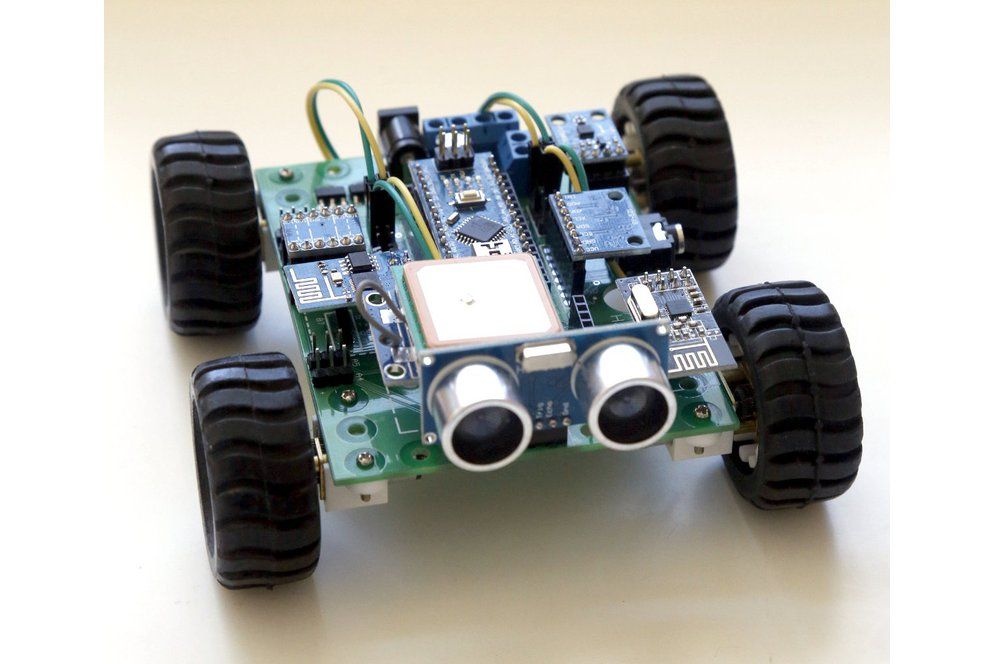
-
Аккуратно установите Motor Shield на Arduino Uno, убедившись, что контакты совпали в правильном положении и не погнулись и не повредились.
-
Вставьте красный провод от батарейного отсека в гнездо VIN на моторном шилде. Используйте маленькую отвертку, чтобы зажать провод в слоте.
-
Вставьте черный провод от батарейного отсека в гнездо GND на моторном шилде. Используйте маленькую отвертку, чтобы зажать провод в слоте.
-
Вставьте красный провод от мотора А в слот A+ на моторном щитке, а черный провод от мотора А к A- слот на Motor Shield. Используйте маленькую отвертку, чтобы зажать провода в пазах.
-
Подсоедините красный провод от двигателя B к разъему B+ на защитной панели двигателя, а черный провод от двигателя B к разъему B- на защитной панели двигателя. Используйте маленькую отвертку, чтобы зажать провода в пазах.
-
Подключите плату Arduino Uno к компьютеру через USB-кабель и загрузите приведенный ниже код с помощью программного обеспечения Arduino IDE.
-
Вставьте четыре батарейки типа АА в батарейный отсек и смотрите, как едет ваша машина!
Если ваш робот движется в неправильном направлении или не двигается, проверьте правильность расположения штифтов двигателя и убедитесь, что штифты не ослаблены.
Дополнительные задачи
-
Управляйте своим роботизированным автомобилем с помощью приложения Android на смартфоне через Bluetooth (см. Arduino (используйте код в нижней части этой страницы урока и измените его, чтобы получать строковые команды, такие как «вперед», «назад», «влево» и «вправо», для управления автомобилем. Вы можете использовать бесплатное приложение, такое как Приложение LearnThruTech RC CarController в iOS App Store для удаленного управления автомобилем.0003
-
Используйте линейные датчики, чтобы автомобиль следовал по траектории, или ультразвуковые датчики, чтобы автомобиль самостоятельно избегал препятствий.

