Как собрать робота с дистанционным управлением в домашних условиях. Какие компоненты нужны для создания радиоуправляемого робота. Как подключить пульт и приемник к шасси робота. Какие есть варианты шасси для робота на радиоуправлении.
Компоненты для создания робота на радиоуправлении
Для сборки простейшего робота на пульте управления потребуются следующие основные компоненты:
- Шасси робота — платформа с колесами или гусеницами
- Двигатели для привода колес
- Аккумулятор для питания робота
- Пульт дистанционного управления (передатчик)
- Приемник радиосигнала
- Драйвер двигателей
Рассмотрим подробнее назначение и особенности выбора каждого компонента.
Шасси робота
Шасси — это основа робота, на которой крепятся все остальные компоненты. Какие варианты шасси можно использовать для радиоуправляемого робота.
- Готовые пластиковые или металлические шасси — самый простой вариант для начинающих. Стоят недорого, легко собираются.
- Самодельное шасси из подручных материалов — позволяет сделать уникальную конструкцию, но требует навыков.
- 3D-печатное шасси — можно спроектировать и напечатать любую форму, но нужен 3D-принтер.
Для первого робота рекомендуется использовать готовое шасси с колесами или гусеницами. Это позволит сосредоточиться на электронике и управлении.

Двигатели для робота
Для приведения робота в движение используются электродвигатели постоянного тока. Как выбрать подходящие моторы.
- Мощность — от 1 до 10 Вт для небольших роботов
- Напряжение питания — обычно 3-12 В
- Скорость вращения — 100-300 об/мин для колесных роботов
- Крутящий момент — чем больше, тем лучше проходимость
Оптимальный вариант — моторы-редукторы с крутящим моментом 1-2 кг*см и скоростью 200-250 об/мин при напряжении 6-12 В.
Аккумулятор для питания робота
Аккумулятор обеспечивает автономную работу робота. На что обратить внимание при выборе:- Напряжение — должно соответствовать напряжению двигателей
- Емкость — от 1000 до 5000 мАч для небольших роботов
- Ток разряда — минимум 2C для стабильной работы
- Тип — лучше использовать LiPo или Li-Ion
Рекомендуемый вариант — LiPo аккумулятор 7,4 В емкостью 2000-3000 мАч.
Выбор системы дистанционного управления
Для управления роботом на расстоянии используется радиоканал. Основные компоненты системы радиоуправления:
Пульт управления (передатчик)
Пульт формирует управляющие сигналы и передает их по радиоканалу. На что обратить внимание при выборе пульта:

- Количество каналов — минимум 2 для управления движением
- Частота — 2.4 ГГц для стабильной связи
- Дальность действия — от 50 до 500 м
- Эргономика — удобство использования органов управления
Для первого робота подойдет простой 2-х канальный пульт пистолетного типа.
Приемник радиосигнала
Приемник принимает сигналы от пульта и преобразует их в управляющие импульсы. Как выбрать совместимый приемник:
- Должен работать на той же частоте, что и пульт
- Количество каналов не меньше, чем у пульта
- Напряжение питания 5-6 В
- Небольшие размеры для компактного размещения
Обычно приемник входит в комплект с пультом управления, что гарантирует их совместимость.
Подключение компонентов робота
После выбора всех компонентов необходимо правильно соединить их между собой. Рассмотрим основные этапы сборки:
Монтаж компонентов на шасси
Компоненты крепятся на шасси в следующем порядке:
- Двигатели — в специальные крепления или на двусторонний скотч
- Аккумулятор — в центре платформы для баланса
- Приемник — в защищенном от вибраций месте
- Драйвер двигателей — рядом с моторами
Все компоненты должны быть надежно закреплены, чтобы избежать отключений при движении робота.
Электрическое подключение
Схема подключения компонентов робота:
- Аккумулятор → драйвер двигателей
- Драйвер двигателей → двигатели
- Приемник → драйвер двигателей
- Аккумулятор → приемник (через стабилизатор напряжения)
Все соединения выполняются проводами соответствующего сечения. Силовые цепи питания желательно защитить предохранителем.
Настройка и тестирование робота
После сборки необходимо настроить систему управления и провести тестирование робота:
- Включить пульт управления
- Подключить аккумулятор к роботу
- Настроить направление вращения двигателей
- Отрегулировать нейтральное положение органов управления
- Проверить работу всех функций робота
- Провести тестовые заезды, отрегулировать чувствительность управления
При возникновении проблем с управлением нужно проверить все соединения и настройки пульта.
Варианты улучшения робота на радиоуправлении
Собрав базовую модель, можно улучшить ее функциональность:
- Добавить сервопривод для поворота колес
- Установить FPV-камеру для вида от первого лица
- Оснастить робота манипулятором на сервоприводах
- Добавить датчики препятствий и автономные функции
- Улучшить ходовую часть для повышения проходимости
Робот на радиоуправлении — отличная платформа для экспериментов и изучения робототехники. Со временем его можно превратить в сложную автономную систему.

Инфракрасный маяк и датчик ка пульт управления для Lego EV3
Главная » Основы робототехники
Содержание
- Пульт управления
- Режимы пульта управления Lego EV3
- Как управлять EV3 без программирования
Пульт управления
Пульт управления Lego роботом можно достаточно быстро сделать на основе домашнего набора EV3. Часто бывает, что робот собран, а навыков программирования еще нет. Но есть желание заставить робота двигаться. Роботом можно управлять удаленно, не прибегая к программированию при помощи инфракрасного управления.
ик управление машинкаДля этого нужен инфракрасный датчик.
Датчик устанавливаем на робота и соединяем кабелем с четвертым портом. Затем левый большой мотор соединяем с портом B, а правый с портом C.
Нажав на центральную кнопку включаем микрокомпьютер EV3. После перехода в третье приложение IR Control третьего окна интерфейса модуля EV3 мы получаем возможность управлять прямым и обратным движением любого мотора, подключенного к любому порту. Пульт управления роботом EV3 практически готов.
Пульт управления роботом EV3 практически готов.
При этом инфракрасный датчик является приемником управляющих сигналов, а инфракрасный маяк служит для удаленного управления, то есть является передатчиком.
Режимы пульта управления Lego EV3
Есть два режима управления. Первый режим использует первый и второй канал для связи с инфракрасным маяком. Обозначается на экране модуля как Ch2+2. Второй режим использует третий и четвертый канал. Обозначается как Ch4+4. Если включить первый канал, то можно управлять моторами, подключенными к портам B и C.
инфракрасное управлениеПри этом первая и вторая кнопка управляет прямым и обратным движением мотора в порту B. Третья и четвертая кнопка управляет мотором в порту C. Если мотор из порта B подсоединить к порту A и мотор из порта C подключить к порту D, то нужно переключить канал на инфракрасном маяке с первого на второй. Первая и вторая кнопка будут управлять мотором в порту A, третья и четвертая мотором в порту D.
тележка Lego EV3- Нажимаем на центральную кнопку и переключаемся во второй режим.
 Моторы оставляем в портах A и D. Канал переключаем на четвертый. Управление моторами будет происходить так же как на втором канале первого режима управления.
Моторы оставляем в портах A и D. Канал переключаем на четвертый. Управление моторами будет происходить так же как на втором канале первого режима управления. - Переставив соединительные кабеля обратно в порты B и C, и переключившись на третий канал можно убедиться, что управление моторами аналогично первому режиму управления на первом канале. То есть левым мотором управляет кнопка один и два, правым три и четыре.
ИК маякЕсли одновременно нажать кнопку один и три, то робот будет двигаться вперед. При одновременном нажатии кнопки два и четыре – назад.
Теперь, произведя нужные настройки, можно дистанционно управлять роботом тележкой и задавать различные траектории движения. Для такого управления не нужны навыки программирования и можно получить быстрый и наглядный результат
Для создания более сложного пульта управления на базе инфракрасного датчика и маяка уже будут нужны навыки программирования. Как правило управление создается при помощи блока «Переключатель».
В этом случае на удаленном маяке можно использовать одиннадцать различных комбинаций кнопок и значительно расширить возможности пульта управления Lego EV3.
Как управлять EV3 без программирования
варианты управления, план уборки помещения
Управление роботом пылесосом
Кнопки на корпусе
Дистанционное управление при помощи пульта
Управление со смартфона по сети Wi-Fi
Способы построения карты помещения
Сенсорная камера
Умный робот-пылесос — мечта любой хозяйки. Он все делает сам. Экономятся силы, время и нервные клетки. Лучшие роботы могут сделать карту помещения. Что это такое и как они управляются, расскажем ниже.
Управление роботом-пылесосом
Управление можно рассмотреть на примере Polaris PVCR 3200 IQ Home Aqua. Этой моделью можно руководить при помощи:
Этой моделью можно руководить при помощи:
- Кнопок на корпусе пылесоса.
- Кнопок на пульте ДУ.
- Значков на экране смартфона (потребуется Wi-Fi 2,4 Гц и Bluetooth) или голосовых команд (через телефон умный робот совместим с Алисой Яндекса и Марусей Mail.ru).
Пылесос имеет несколько режимов работы и умеет строить карту помещения, используя инфракрасные датчики с гироскопом. Фирменное приложение — Polaris IQ Home.
Кнопки на корпусе
На корпусе пылесоса есть четыре кнопки управления. Сверху в центре находится главная «вкл – выкл (работа) – старт – стоп». Лампочки подсветки (красная, розовая, голубая) сигнализируют о состоянии аппарата. Ближе к краю две дополнительные: возврат на док-станцию и уборка по спирали. На нижней стороне — кнопка «вкл – выкл (питание)».
Дистанционное управление при помощи пульта
Для управления роботом на пульте предусмотрены ЖК дисплей и 13 кнопок. На экране показан режим работы в настоящее время и часы. С помощью навигационного круга можно направить пылесос в любую сторону. Питание пульта — батареи ААА (2 шт.).
На экране показан режим работы в настоящее время и часы. С помощью навигационного круга можно направить пылесос в любую сторону. Питание пульта — батареи ААА (2 шт.).
Управление со смартфона по сети Wi-Fi
Чтобы управлять PVCR 3200 с телефона по иконкам, надо:
- Скачать приложение Polaris IQ Home, установить его и зарегистрировать, то есть привязать персональный счет к номеру смартфона.
- Добавить пылесос в перечень домашних устройств, войти в Wi-Fi робота и ввести туда название домашней сети и пароль. На экране: «Дом» — «Добавить устройство» — «Все устройства» — выбрать PVCR-3200. Далее: открыть настройки Wi-Fi, подключить смартфон к сети PVCR-3200, вернуться в приложение.
- Нажать на корпусе пылесоса обе дополнительные кнопки и удерживать до звукового сигнала.
- Выбрать название и ввести пароль сети, потом «Подключить» и подождать до окончания процесса.

Подробно процесс подключения и настройки с указанием особенностей гарнитуры iOS и Android приведен в инструкции.
- Классическая. Это базовая опция, робот создает карту комнаты. Она сохраняется и во время каждой последующей уборки дополняется.
- Спираль. Для участков повышенной загрязненности. Аппарат работает локально 2 минуты.
- Максимум. Мощность всасывания возрастает.
- Вдоль стен.
- Случайный маршрут.
Следует помнить, что включение режима «Максимум» сопровождается ускоренным разрядом батареи.
Способы построения карты помещения
Зачем роботу-пылесосу нужна карта помещения? Чтобы это понять, достаточно вспомнить, какими несовершенными были первые разработки. Они перемещались по комнате хаотично, иногда вообще казалось непонятным «зачем он туда едет?».
Но аппараты со временем становились все лучше и вот, наконец, появился робот, способный не только обходить преграды, а еще и нарисовать карту комнаты. А с ее помощью — определять наилучший маршрут движения. Как он это делает? При помощи специального устройства анализирует обстановку, определяет конфигурацию и параметры, заносит данные в память и сохраняет их. После сбора сведений электронный блок вычисляет оптимальный маршрут. Что это за устройства? На данный момент применяется закрепленная на корпусе сенсорная камера или лазерный дальномер (датчик).
Сенсорная камера
Робот-пылесос с камерой работает так. Когда аппарат перемещается по комнате, сенсор «изучает» поверхности окон и дверей, стен и потолка, а также всех имеющихся препятствий. Собранные сведения отправляются в программный блок, где и анализируются. Затем по ним строится оптимальный маршрут.
Достоинством приборов данного типа, кроме разработки наилучшего маршрута, является возможность возобновлять работу автоматически.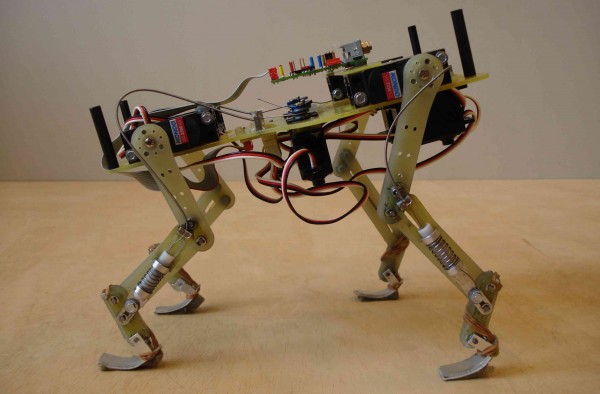
Недостаток — качество уборки не очень высокое. А если освещение недостаточное, то программа дает сбои.
Лазерный датчик
Лазерный датчик-дальномер располагается в стационарной башенке на верхней части аппарата. Как и камера, он «осматривает» все поверхности и все препятствия. Данные идут в процессорный блок и обрабатываются, после чего программа предлагает лучшую траекторию движения.
Преимущества роботов этого типа:
- Более высокое качество уборки. Аппарат проходит по всем участкам, ничего не пропускает.
- Пылесос «помнит» линии, по которым он уже проходил, и не повторяет их.
- Если освещение слабое, это не ухудшает работу, уборщик хорошо ориентируется в полумраке.
- Данный робот-пылесос, как и оборудование предыдущего типа, самостоятельно находит станцию подзарядки.

Вреден ли лазер для глаз владельцев квартиры и их домашних питомцев? Животные на него не реагируют (проверено на собаках и кошках), а человек вообще не видит.
Еще один маленький недостаток в том, что башенка несколько увеличивает высоту прибора. Из-за этого у него, возможно, не получится «залезть» под шкаф или тумбу. Так что перед покупкой этот параметр лучше измерить.
Умные роботы-пылесосы с функцией построения карты помещения выгодно отличаются от других моделей по качеству уборки. Умение находить док-станцию также способствует их популярности.
Как построить робота с дистанционным управлением с нуля
Когда я создаю что-то в области робототехники, приятно то, что я могу повторно использовать компоненты из одного проекта в другой. Несколько коробок с датчиками, драйверами двигателей и широким ассортиментом комплектов. Чего здесь не хватает, так это просто идеи и времени, чтобы собрать ее воедино. Итак, я решил построить что-то новое, что-то, что я никогда не строил раньше.
Итак, я решил построить что-то новое, что-то, что я никогда не строил раньше.
Я решил использовать пульт дистанционного управления с приемником, мобильную платформу и один из мощных драйверов двигателей на рынке и в то же время лучший из моей коллекции. В результате получился дистанционно управляемый робот.
Для такого проекта требуются базовые знания в области электроники (кое-что о напряжении, силе тока, использовании силовых проводов, пайке и т. д.). Кроме того, это простой проект, который можно выполнить за несколько часов.
В этой статье я описал используемые комплектующие, как собрать комплектующие, и наконец вы увидите как я тестировал робота на собственной кухне.
Аппаратные компоненты, используемые в проекте
- Пульт дистанционного управления Flysky FS-T6-RB6 2,4 ГГц FS
Я нашел пульт дистанционного управления 2,4 ГГц и приемник по хорошей цене на eBay где-то в начале этого года.
- Приемник с шестью радиоканалами
шел в комплекте с пультом.
- Алюминиевое шасси
Я купил шасси два года назад, чтобы использовать его на улице (в парке, на улице и т.д.). Пока что я не играл с ним очень долго и не вне дома. Причины следующие: плохая работа двигателей постоянного тока, колеса из бьющегося жесткого пластика, относительно мало места внутри шасси, поэтому большая открытость компонентов, которые крепятся снаружи платформы. - Драйвер двигателя Sabertooth 2x25A
Я приобрел его в прошлом году, и это мощный драйвер двигателя, способный управлять двигателями постоянного тока с высоким крутящим моментом. Двигатели постоянного тока, используемые в этом шасси, отличаются низким энергопотреблением и производительностью. - Аккумулятор LiPo
Аккумулятор Zippy 7,4 В с двумя элементами и скоростью разряда 20C. - Силовые провода и инструменты
Мне понадобились силовые провода, отвертка и паяльник.
Силовые провода и инструменты
Как собрать электронику
Как собрать электронику
Это, пожалуй, самая важная часть этого руководства. Здесь я даю описание соединений между 6-канальным приемником, драйвером двигателя и аккумулятором.
Как показано на предыдущем изображении, используются только два из шести каналов приемника. Один из них подключен к входному каналу S2, а второй канал подключен к входу S1 драйвера двигателя.
Приемник питается от драйвера двигателя, а именно от выходов 5В и 0В.
Выходы M1 подключены к двум двигателям постоянного тока, а выходы M2 подключены к двум другим двигателям.
Положительная клемма аккумулятора подключается к положительной клемме (+) привода двигателя, а отрицательная клемма аккумулятора подключается к отрицательной клемме привода двигателя.
Хм, наконец-то я закончил подключение. Все так, как я описал выше. Но есть некоторые детали, которые я должен упомянуть. К ним относятся драйвер двигателя, который имеет ряд переключателей, используемых для установки режима работы, и специальный переключатель для типа батареи LiPo.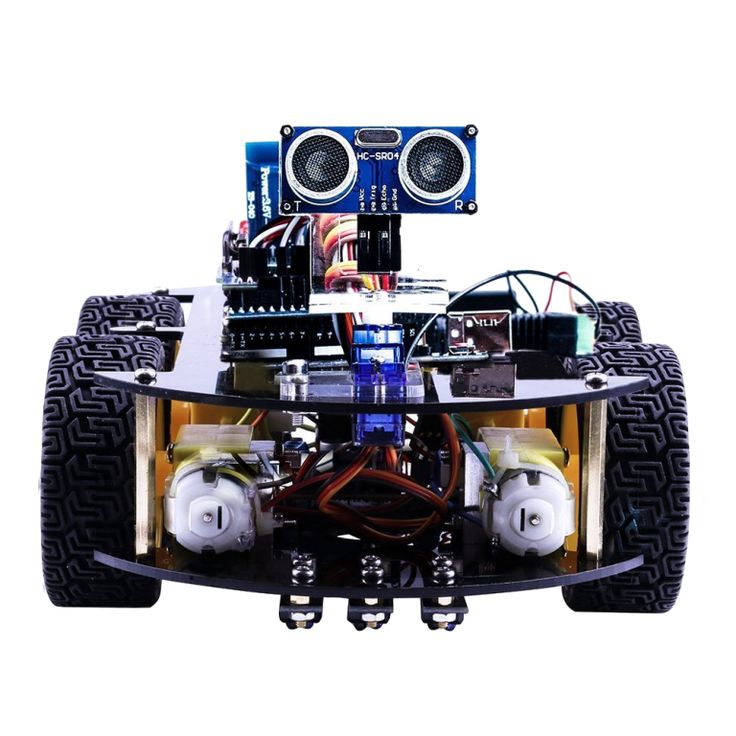
Как настроить драйвер двигателя Sabertooth
Любой привод Sabertooth поставляется с набором из шести переключателей. В зависимости от его использования, с помощью пульта дистанционного управления или микроконтроллера, пользователь должен установить переключатели в правильное положение.
Выключатель 3 для батареи и выключен. Когда используется батарея LiPo, драйвер двигателя заботится и защищает батарею, чтобы выдерживать большее количество циклов зарядки и разрядки.
Переключатели 2,4 и 6 включены
- Переключатель 2 в положении ON – входной сигнал аналоговый.
- Переключатель 4 в положении ON – режим дистанционного управления.
- Переключатель 6 в положении ON – если сигнал дистанционного управления прерывается, привод двигателей останавливает двигатели постоянного тока в качестве меры безопасности.
Драйвер Sabertooth подключается к приемнику и интерпретирует каждый полученный сигнал от пульта дистанционного управления. Это меняет направление двигателей в зависимости от полученного сигнала, другими словами, я могу управлять роботом, чтобы он двигался в любом направлении, которое я хочу.
Это меняет направление двигателей в зависимости от полученного сигнала, другими словами, я могу управлять роботом, чтобы он двигался в любом направлении, которое я хочу.
Тестирование робота
Учебные пособия по сборке робота
Робототехника с дистанционным управлением
Кто-то может возразить, что робот на самом деле не робот, если он не является автономным . Может быть, это или, может быть, это не так. Дело в том, что эти некоторые дебилы. Как научиться внедрить функции дистанционного управления в робота — очень важный навык в создании роботов. Чтобы оправдать это, я быстро пройдусь по интеллектуальному управлению роботом. методы . . .
Введение в интеллект роботов
На самом деле существует целый спектр интеллекта роботов. Полностью дистанционное управление
и полностью автономные — не единственные варианты.
Вместо этого вы должны решить, какой уровень интеллекта
вы хотите, чтобы ваш робот имел. Обычно предполагается, что чем умнее, тем
построить сложнее.
Обычно предполагается, что чем умнее, тем
построить сложнее.
Вот основные категории:
Автомат «Интеллект»
Низший уровень интеллекта робота — это простое автоматическое устройство.
Мое определение автомата — это устройство, в котором нет абсолютно никаких решений.
сделано независимо от данной среды.
Это простые устройства, действие которых повторяется автоматически.
Простая схема с двигателем или комбинацией шестерен и пружины может легко
быть автоматом. Вы когда-нибудь слышали о тех «роботах» 1800-х годов, которые, по-видимому,
может писать имена и стихи и прочую бесполезную чепуху? Им было очень хорошо
спроектированные зубчатые интеграции. Однако эти «роботы» продолжали бы писать, даже если бы чернила текли.
закончились чернила. . . Устройство просто не имеет отказоустойчивости и будет продолжать попытки выполнить действие.
У них не было даже способа ощутить окружающую среду, что требовалось для принятия решений.
BEAM «роботы» в основном попадают в ту же категорию,
за исключением того, что они сделаны из очень хорошо спроектированной электроники, а не из шестерен.
Пульт дистанционного управления «Интеллект»
Дистанционное управление — это следующий уровень интеллекта роботов. Наша текущая технология
способный построить так много машин, физически способных на гораздо большее, чем
любая форма жизни на нашей планете. Наши самолеты летают во много раз со скоростью звука,
наши повседневные автомобили могут пересечь пустыню Сахара за несколько дней, но наши
лучшие компьютеры не могут даже сравниться с мозгом тараканов с точки зрения автономности. Решение?
Поместите человеческий мозг на место водителя наших машин. Это позволяет
Лучшее обоих миров. Сила и расходимость машины, мозг человека.
Боевые роботы — прекрасный пример.
Телеоперация
Телеуправление на шаг выше дистанционного управления. Преимущество компьютера
над человеческим мозгом скорость. Типичный домашний компьютер сегодня может обрабатывать больше чисел за
на несколько секунд, чем человек может за всю жизнь. Но несмотря на эту скорость,
компьютер плохо понимает ситуацию.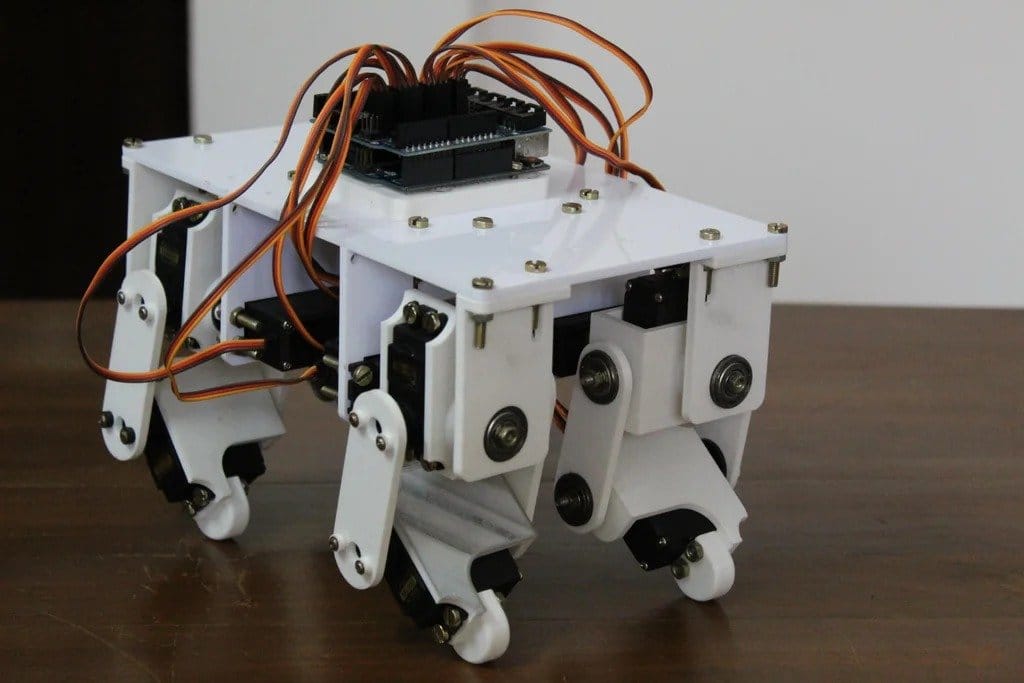 Кроме того, наш самый передовой
электронные датчики не могут сравниться с нашими человеческими глазами и ушами для наблюдения за ситуацией.
Решение? Пусть человек принимает решения, а компьютер их выполняет.
Идеальное использование для этого было бы роботом-пауком. Человек-оператор никоим образом не может контролировать
8 ножек с 3 суставами на каждой. Вместо этого человек будет отдавать команды типа «идти вперед».
или «повернуть», а компьютер сделает все остальное. Этот метод также очень распространен
с космическими роботами из-за большой задержки передачи.
Кроме того, наш самый передовой
электронные датчики не могут сравниться с нашими человеческими глазами и ушами для наблюдения за ситуацией.
Решение? Пусть человек принимает решения, а компьютер их выполняет.
Идеальное использование для этого было бы роботом-пауком. Человек-оператор никоим образом не может контролировать
8 ножек с 3 суставами на каждой. Вместо этого человек будет отдавать команды типа «идти вперед».
или «повернуть», а компьютер сделает все остальное. Этот метод также очень распространен
с космическими роботами из-за большой задержки передачи.
Полная автономия
Полностью автономные роботы пока остаются мечтой. Это огромная область в современном состоянии
исследования робототехники. Это касается искусственного интеллекта, сознания, передовых
чувственное восприятие. . . список можно продолжить. Огромный философский подтекст.
Но все это выходит за рамки данного урока. Если сделать робота
который может намеренно перемещаться с вашего дивана на кухню и обратно без каких-либо столкновений
сам по себе вы построили автономного робота.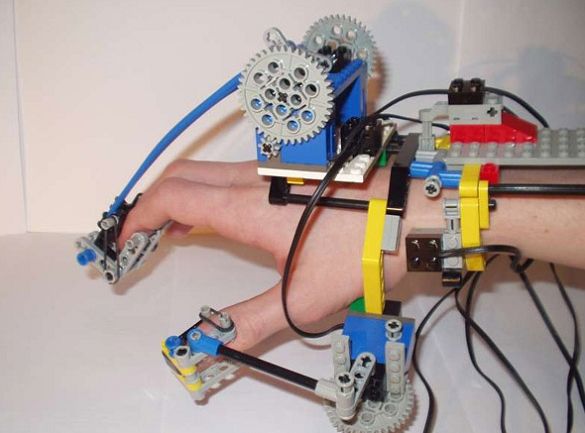 Но если это не принесет пива обратно, вы все еще новичок в моих глазах. . .
Но если это не принесет пива обратно, вы все еще новичок в моих глазах. . .
Как собрать робота с дистанционным управлением
Робот с дистанционным управлением, вероятно, самый простой из всех роботов, которые вы можете сделать.
Полный новичок, вероятно, может сделать базового робота с дистанционным управлением менее чем за час. Электронная часть
plug-n-play, шасси робота
быть то, что займет немного времени. Робототехника с дистанционным управлением отлично подходит для тех, кто хочет
построить робота — пока не имеет
достаточно времени, навыков и/или терпения, чтобы довести большой проект до конца.
Взгляните на пример робота для лазания по стенам с рукой.
Во-первых, видео, которое поможет вам начать работу:
Все, что вам нужно, это несколько дешевых доступных в продаже предметов:
Передатчик дистанционного управления
Передатчик дистанционного управления представляет собой портативную штуковину с ручками и кнопками и длинной антенной.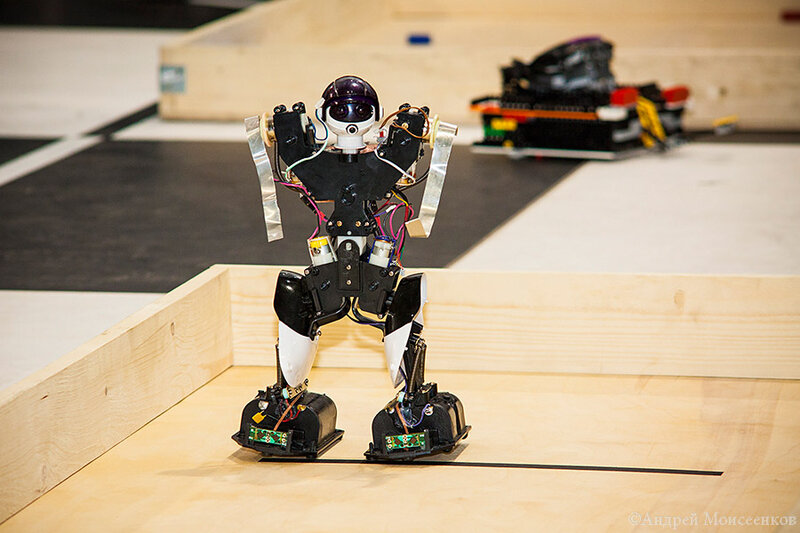 торчащие из него. Это будет самая дорогая часть, которую вам нужно купить, около 40-200 долларов.
Для этого потребуется собственный аккумулятор и зарядное устройство. Передатчик дистанционного управления обычно имеет
очень хороший ассортимент. Однажды в качестве теста я поставил своего робота
в подвале дома, поднялся на 10 этаж, потом эксплуатировал без проблем.
Если вы планируете когда-либо сделать USAR (Городской поиск и спасение) , это полезная функция.
Самая важная функция, о которой вам нужно беспокоиться, — это количество каналов, на которых он может работать.
Каждый канал позволяет вам управлять еще одним элементом вашего робота. Я рекомендую по крайней мере три,
но в прошлом я часто использовал до шести на одном роботе.
торчащие из него. Это будет самая дорогая часть, которую вам нужно купить, около 40-200 долларов.
Для этого потребуется собственный аккумулятор и зарядное устройство. Передатчик дистанционного управления обычно имеет
очень хороший ассортимент. Однажды в качестве теста я поставил своего робота
в подвале дома, поднялся на 10 этаж, потом эксплуатировал без проблем.
Если вы планируете когда-либо сделать USAR (Городской поиск и спасение) , это полезная функция.
Самая важная функция, о которой вам нужно беспокоиться, — это количество каналов, на которых он может работать.
Каждый канал позволяет вам управлять еще одним элементом вашего робота. Я рекомендую по крайней мере три,
но в прошлом я часто использовал до шести на одном роботе.
Ресивер
Приемник представляет собой небольшую коробочку, которую вы надеваете на своего робота. Он принимает сигнал
от вашего передатчика, обрабатывает его, а затем выводит сигнал готовности сервопривода. Это будет
вторая самая дорогая часть, обычно около 30-60 долларов. Это потребует
около ~ 5 В для его питания.
Это потребует
около ~ 5 В для его питания.
Приемники могут быть очень маленькими:
Если вы хотите использовать более высокое напряжение для сервоприводов, приобретите что-нибудь называется Y-образным жгутом (см. изображение ниже).
Вы просто подключаете его к порту сервопривода, а затем подключаете свой батареи более высокого напряжения и ваш сервопривод на другом конце. Прочтите инструкцию по питанию! Как и в случае с передатчиком, вы должны заботиться о том, сколько каналов вы хотели бы иметь.
Кристалл рабочей частоты
И для вашего передатчика, и для вашего приемника потребуется кристалл. Это необходимо
чтобы убедиться, что оба ваших устройства работают на одной и той же частоте (поэтому купите
оба кристалла с одинаковым каналом !!!). Для RC есть
две частоты, о которых вам нужно знать. Один для воздуха и один для поверхности .
Помните, что это незаконная и плохая практика — управлять автомобилем на дистанционном управлении с помощью радиочастоты. Вы можете случайно вызвать крушение чьего-то самолета с дистанционным управлением и убить бедную милую невинную белку!
Но вы это уже знали. . . Когда вы покупаете свой приемник/передатчик, они укажут, является ли он
следует использовать для воздушных или надводных RC. Еще одно замечание, кристалл хрупкий. Если ваш автомобиль с дистанционным управлением
много падает, кристалл может быть поврежден. Я когда-то делал робота для USAR-соревнований.
который был разработан, чтобы выдержать падение с высоты 7 футов. Но видимо кристалла не было.
Разбилось. Грусть. Решение?
Приемники часто поставляются с прокладка из пеноматериала штука для обертывания для амортизации . Если нет, найдите
немного поролона и используйте его. Кристаллы обычно входят в состав вашего передатчика и
приемник, но если нет, или если вы сломаете один, они будут стоить около 8 долларов плюс доставка для замены.
Вы можете случайно вызвать крушение чьего-то самолета с дистанционным управлением и убить бедную милую невинную белку!
Но вы это уже знали. . . Когда вы покупаете свой приемник/передатчик, они укажут, является ли он
следует использовать для воздушных или надводных RC. Еще одно замечание, кристалл хрупкий. Если ваш автомобиль с дистанционным управлением
много падает, кристалл может быть поврежден. Я когда-то делал робота для USAR-соревнований.
который был разработан, чтобы выдержать падение с высоты 7 футов. Но видимо кристалла не было.
Разбилось. Грусть. Решение?
Приемники часто поставляются с прокладка из пеноматериала штука для обертывания для амортизации . Если нет, найдите
немного поролона и используйте его. Кристаллы обычно входят в состав вашего передатчика и
приемник, но если нет, или если вы сломаете один, они будут стоить около 8 долларов плюс доставка для замены.
Приведенные выше материалы — это основы, необходимые для удаленного управления, но вы еще не закончили. Теперь вам нужно еще несколько вещей, чтобы построить шасси робота:
Теперь вам нужно еще несколько вещей, чтобы построить шасси робота:
- Дополнительно: Материал корпуса робота
HDPE и/или алюминий следует использовать для рамы. Хотите построить его за 5 минут? Простой квадратный лист HDPE с все части липучка на самом деле будет работать! Но вы должны прикрепить все более прочно для хорошо спроектированного робота.
Дополнительно: Сервоприводы
Сервоприводы, хотя и не обязательны, предназначены для
использоваться с автомобилями с дистанционным управлением. Все, что вам нужно сделать, это буквально подключить его прямо к
ваш приемник, и он мгновенно работает. Получите два сервопривода — по одному на каждую сторону вашего робота —
так что у вас есть дифференциал
водить машину. Установите колесико сзади для балансировки. Вы также можете использовать дополнительные
сервоприводы для других вещей, таких как вращение камеры, подъем лопаты или управление роботом-манипулятором.
Если у вас ограниченный бюджет, я настоятельно рекомендую Hitec HS-311 сервоприводы. Они только стоят
около 8 долларов и очень хорошо работают для того, что вам нужно. Но, конечно, сервоприводы за 30 долларов работают еще лучше. . .
А вот как установить сервоприводы на шасси робота.
Они только стоят
около 8 долларов и очень хорошо работают для того, что вам нужно. Но, конечно, сервоприводы за 30 долларов работают еще лучше. . .
А вот как установить сервоприводы на шасси робота.
Опционально: дистанционное управление
Теперь вам не нужен микроконтроллер для любого
базовый дистанционно управляемый робот. Но если вы хотите, чтобы это работало дистанционно, у вас должно быть что-то
для обработки ваших команд. Так, как это работает? Основная концепция
— отправить команду с передатчика на приемник
— приемник затем выводит прямоугольную волну сервопривода
— простая схема резисторного конденсатора изменяет эту прямоугольную волну на аналоговое значение
— а затем аналоговый порт на вашем микроконтроллере интерпретирует
это аналоговое значение в определенную команду, основанную на вашей написанной программе.
Схема преобразователя сервосигнала в аналоговый сигнал:
Дополнительно: драйвер двигателя высокой мощности / регулятор скорости
Если вам нужен мощный робот, который использует что-то гораздо более мощное, чем хобби
сервоприводы, вместо этого вам нужен драйвер двигателя. Большинство на рынке должны напрямую
принять сигнал, сделанный для сервопривода, и преобразовать его в то, что вам нужно для
двигатели постоянного тока. Просто подключите это устройство
к вашему приемнику, и прикрепите к нему ваши моторы и батарею, и, клянусь белками, вы
иметь мгновенного Battlebot. Имейте в виду, что это может быть немного дороже, и многие
способны работать только с одним двигателем, а это означает, что вам нужно будет купить два.
Большинство на рынке должны напрямую
принять сигнал, сделанный для сервопривода, и преобразовать его в то, что вам нужно для
двигатели постоянного тока. Просто подключите это устройство
к вашему приемнику, и прикрепите к нему ваши моторы и батарею, и, клянусь белками, вы
иметь мгновенного Battlebot. Имейте в виду, что это может быть немного дороже, и многие
способны работать только с одним двигателем, а это означает, что вам нужно будет купить два.
Дополнительно: регулятор скорости
Регулятор скорости представляет собой Н-мост.
который работает по сигналу дистанционного управления. Подключите один провод к приемнику, два к контактам аккумулятора,
и два на проводах двигателя — и все это управляется вашим передатчиком. Если вы хотите построить быстрый
автомобиль с дистанционным управлением, управляемый двигателем постоянного тока, или, возможно, вам нужен двигатель для привода оружия вашего
боевой бот, это путь.
Последний шаг: сборка робота с дистанционным управлением
Думаю, лучший способ объяснить это — показать пример. Этот конкретный робот был сделан
мной и моим другом менее чем за 5 часов в начале 2003 года. В нем используются довольно дорогие пластины lexan ,
лего кастор, и
суперклей, двусторонний скотч и липучка
чтобы соединить все вместе. Гетто, да. Но он очень хорошо держался вместе, и его было легко/быстро сделать.
Этот конкретный робот был сделан
мной и моим другом менее чем за 5 часов в начале 2003 года. В нем используются довольно дорогие пластины lexan ,
лего кастор, и
суперклей, двусторонний скотч и липучка
чтобы соединить все вместе. Гетто, да. Но он очень хорошо держался вместе, и его было легко/быстро сделать.
Он был предназначен для игры в футбол, но, поскольку я жил в то время в Питтсбурге, также было много снега лопатой. . . Вот видео его работы:
Пульт дистанционного управления, который я использовал, был Лазер 6.
А вот две команды дистанционно управляемых футбольных роботов
, сделанные в одной и той же моде:
Справочная таблица радиочастот
В редких случаях вам может понадобиться узнать, на какой частоте вы вещаете,
а не только какой это канал. Например, если ваш робот с дистанционным управлением
для подводной среды, вам нужна самая низкая возможная частота
свести к минимуму затухание (помехи).
72 мегагерца, каналы 11–60: это самый популярный выбор для летающих моделей. На этих каналах будет доступно большинство радиостанций, предназначенных для моделей самолетов и вертолетов. ЗАПРЕЩАЕТСЯ использовать эту частоту для чего-либо, кроме самолетов, так как вы можете непреднамеренно вызвать крушение чужого радиоуправляемого самолета неподалеку. Большое дело? Не так уж и много, когда проигрывают сотни в $$ от повреждения или, что еще хуже, от смерти или травмы в результате аварии. . .
75 мегагерц, каналы 61-90: автомобили, лодки и другие нелетающие модели должны использовать один из этих каналов. Радиостанции с пистолетной рукояткой доступны на 27 МГц, а также на 75 МГц.
27 мегагерц, каналы A1-A6 и 50 мегагерц, каналы 00-09: разрешены для использования в воздухе или на поверхности,
мы рекомендуем использовать частоту 27 МГц только для наземных моделей. Пилот и водитель вещают на одной и той же частоте 27 МГц.
частота вызовет помехи и может привести к аварии.
