Как уменьшить обороты электродвигателя 220В. Какие существуют способы регулирования скорости вращения. Какие устройства используются для изменения оборотов. На что обратить внимание при выборе регулятора оборотов.
Общие сведения об асинхронных электродвигателях
Асинхронные электродвигатели переменного тока широко применяются в промышленности и быту. Их главное назначение — преобразование электрической энергии в механическую. Термин «асинхронный» означает, что частота вращения ротора отличается от частоты переменного напряжения в статоре.
Существует два основных типа асинхронных двигателей:
- Однофазные — применяются в бытовой технике
- Трехфазные — используются в промышленном оборудовании
По конструкции ротора трехфазные асинхронные двигатели делятся на:
- С короткозамкнутым ротором (около 95% всех двигателей)
- С фазным ротором
Конструктивные особенности асинхронных двигателей
Основные конструктивные элементы асинхронного двигателя:
- Статор — неподвижная часть из листов электротехнической стали
- Ротор — вращающаяся часть в виде цилиндра с напрессованным сердечником
- Обмотки статора и ротора
- Подшипниковые щиты
- Вентилятор охлаждения на валу ротора
Статор не имеет явно выраженных полюсов. Число полюсов определяется количеством катушек в обмотках статора. Между статором и ротором имеется минимальный воздушный зазор.
Обмотка короткозамкнутого ротора выполняется в виде «беличьей клетки» из медных или алюминиевых стержней. В двигателях до 100 кВт применяется заливка алюминием.
Принцип работы асинхронного двигателя
Принцип работы асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с токами, наведенными этим полем в обмотке ротора. Рассмотрим основные этапы:
- При подаче трехфазного напряжения на обмотки статора создается вращающееся магнитное поле.
- Это поле пересекает проводники обмотки ротора и наводит в них ЭДС.
- Под действием ЭДС в обмотке ротора возникают токи.
- Взаимодействие токов ротора с магнитным полем статора создает вращающий момент.
- Ротор начинает вращаться вслед за полем статора, но с некоторым отставанием (скольжением).
Скольжение — это отношение разности скоростей вращения магнитного поля статора и ротора к скорости поля статора. При пуске скольжение максимально (около 100%), при работе на холостом ходу — минимально.
Способы регулирования оборотов асинхронного двигателя
Для уменьшения оборотов электродвигателя 220В или 380В применяются следующие способы:
- Изменение сопротивления в цепи ротора (для двигателей с фазным ротором)
- Изменение напряжения на обмотках статора
- Изменение частоты питающего напряжения
- Переключение числа пар полюсов обмотки статора
Рассмотрим подробнее каждый из этих способов регулирования скорости вращения:
Изменение сопротивления ротора
Этот способ применяется только для двигателей с фазным ротором. В цепь обмотки ротора включаются дополнительные резисторы, что приводит к снижению частоты вращения. Однако при этом снижается и мощность двигателя, что ведет к потерям энергии.
Изменение напряжения статора
При снижении напряжения на обмотках статора уменьшается магнитный поток и, соответственно, частота вращения ротора. Этот способ эффективен при вентиляторной нагрузке. Для плавного регулирования применяются автотрансформаторы или тиристорные регуляторы.
Изменение частоты питающего напряжения
Частота вращения магнитного поля статора прямо пропорциональна частоте тока: n = 60f/p, где f — частота тока, p — число пар полюсов. Изменяя частоту питающего напряжения, можно плавно регулировать обороты двигателя. Этот способ оптимален для двигателей с короткозамкнутым ротором.
Переключение числа пар полюсов
Изменение числа пар полюсов обмотки статора позволяет ступенчато регулировать скорость вращения. Существует два варианта реализации:
- Укладка в пазы статора двух обмоток с разным числом пар полюсов
- Использование обмотки, состоящей из двух частей с возможностью параллельного или последовательного соединения
Виды регуляторов оборотов электродвигателей
Для практической реализации описанных способов регулирования применяются различные устройства:
- Тиристорные (симисторные) регуляторы
- Транзисторные ШИМ-регуляторы
- Частотные преобразователи
Рассмотрим особенности каждого типа регуляторов:
Тиристорные регуляторы
Принцип действия основан на изменении угла открытия тиристоров или симисторов. Преимущества:
- Простота конструкции
- Низкая стоимость
- Компактность
Недостатки:
- Применимы только для двигателей небольшой мощности
- Возможны шумы и рывки при работе
- При использовании симисторов возможно попадание постоянной составляющей на двигатель
Транзисторные ШИМ-регуляторы
Работают по принципу широтно-импульсной модуляции напряжения. Преимущества:
- Малые габариты и вес
- Отсутствие шума на низких оборотах
- Возможность управления низковольтным сигналом
Основной недостаток — ограничение по длине кабеля до двигателя (не более 3-4 м).
Частотные преобразователи
Изменяют частоту питающего напряжения. Это наиболее универсальный и эффективный способ регулирования. Преимущества:
- Широкий диапазон регулирования
- Высокий КПД
- Плавность регулирования
- Возможность программного управления
Недостатки — высокая стоимость и сложность настройки.
Критерии выбора регулятора оборотов
При выборе регулятора оборотов электродвигателя необходимо учитывать следующие факторы:
- Тип двигателя (коллекторный, асинхронный)
- Мощность двигателя
- Диапазон регулирования скорости
- Характер нагрузки
- Условия эксплуатации
- Требования к точности поддержания скорости
Мощность регулятора должна быть на 20-30% выше мощности двигателя. Для двигателей с вентиляторной нагрузкой подойдут простые тиристорные регуляторы. Для более сложных применений оптимальным выбором будут частотные преобразователи.
Схемы простых регуляторов оборотов
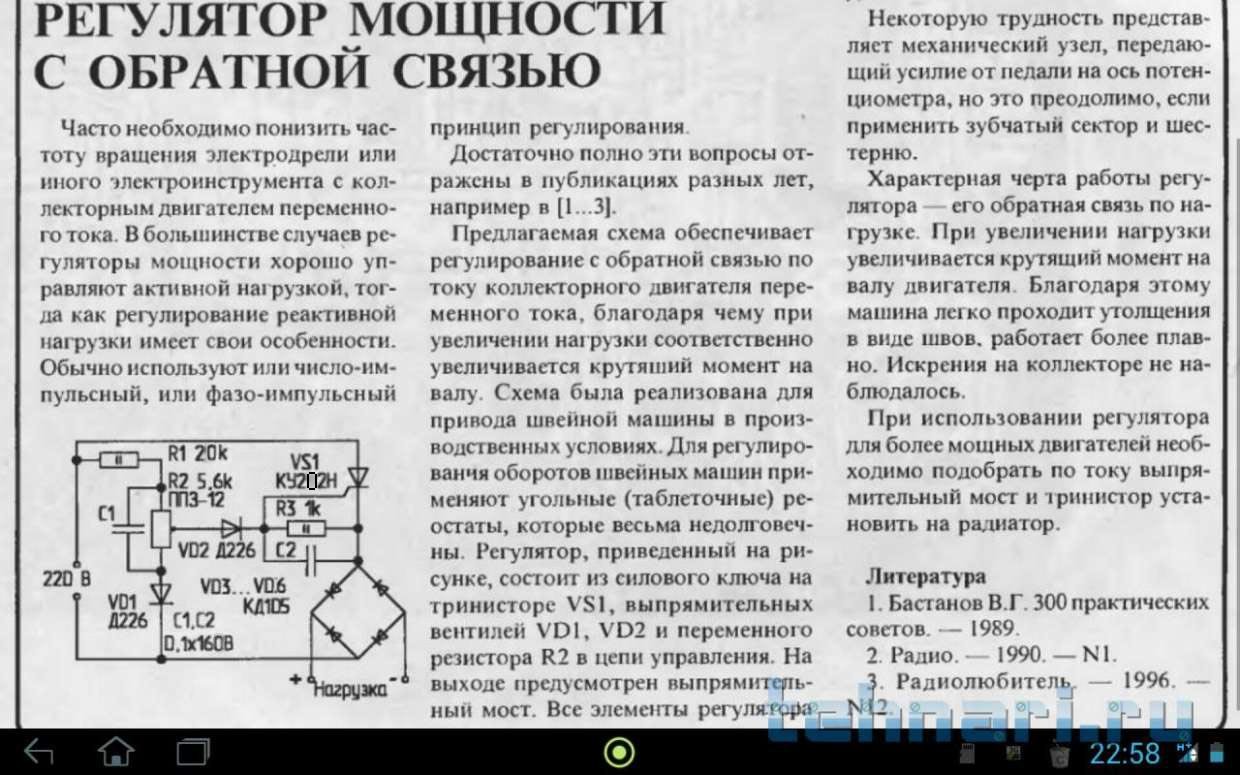
Для самостоятельного изготовления можно рекомендовать простые схемы на основе симисторов или транзисторов. Вот пример схемы симисторного регулятора для коллекторного двигателя:
«`text R1 = 100 кОм (потенциометр) R2 = 1 кОм R3 = 180 Ом C1 = 0.1 мкФ C2 = 0.01 мкФ VS1 = BT137 или аналогичный симистор D1 = 1N4007 VS1 AC o—/\/\—+—o M | | R1 —-+——| | | | R2 C1 | | | | GND GND | | R3—+——-+ | | C2 D1 | | GND GND «`Заключение и рекомендации
Выбор способа и устройства для регулирования оборотов электродвигателя зависит от конкретной задачи и типа двигателя. Для бытовых приборов и маломощных двигателей подойдут простые тиристорные или транзисторные регуляторы. В промышленных применениях оптимальным решением являются частотные преобразователи.
При самостоятельном изготовлении регуляторов необходимо соблюдать правила электробезопасности и учитывать особенности конкретного двигателя. В сложных случаях рекомендуется обратиться к специалистам для подбора и настройки оптимального устройства регулирования.
изменение скорости вращения и схемы на тиристорах • Мир электрики
Сейчас мы рассмотрим как управлять вращением мотора стиральной машины, скоростью и направлением. Этот материал является продолжением темы подключения моторов от СМА, поднятой по многочисленным просьбам посетителей сайта 2 Схемы.
Сразу заметим, что это коллекторный двигатель, для которого не нужен пусковой конденсатор. Этот двигатель, как правило, оснащен тахометром, который являясь частью обратной связи стабилизирует частоту вращения. Без него мотор может чрезмерно увеличить обороты, вплоть до отказа двигателя. Электродвигатели этого типа быстродействующие, могут выдавать даже несколько тысяч оборотов в минуту, что может быть помехой в некоторых устройствах.
Прежде всего по наклейке на корпусе двигателя необходимо прочитать, какая мощность у него. В качестве альтернативы проверьте ваттметром, вставленным в розетку электросети, чтобы узнать сколько энергии потребляет мотор. Эти типы двигателей обычно потребляют несколько сотен ватт мощности. В разных источниках указано энергопотребление от 120 до 360 Вт.
Эти типы двигателей обычно потребляют несколько сотен ватт мощности. В разных источниках указано энергопотребление от 120 до 360 Вт.
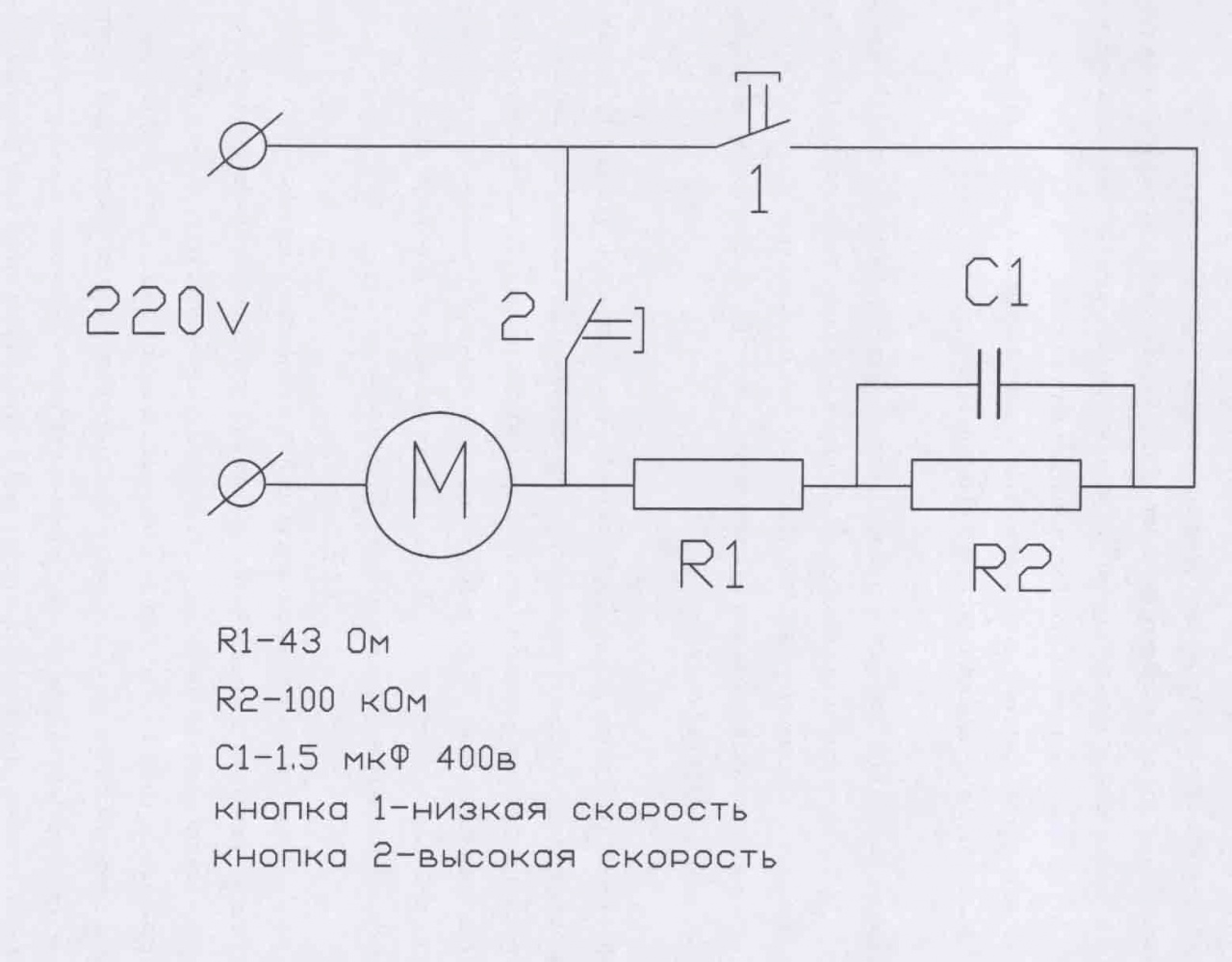
Двигатель имеет две скорости вращения. На холостом ходу (на стирке) мотор потребляет мощность 40 Вт. Вторая скорость вращения, при которой двигатель потребляет 300 Вт мощности (при отжиме). Эти скорости изменяются соответствующим переключением обмоток на статоре двигателя. Во время отжима обороты двигателя могут составлять даже несколько тысяч об/мин.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
- Однофазные.
- Трехфазные.
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору. Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора.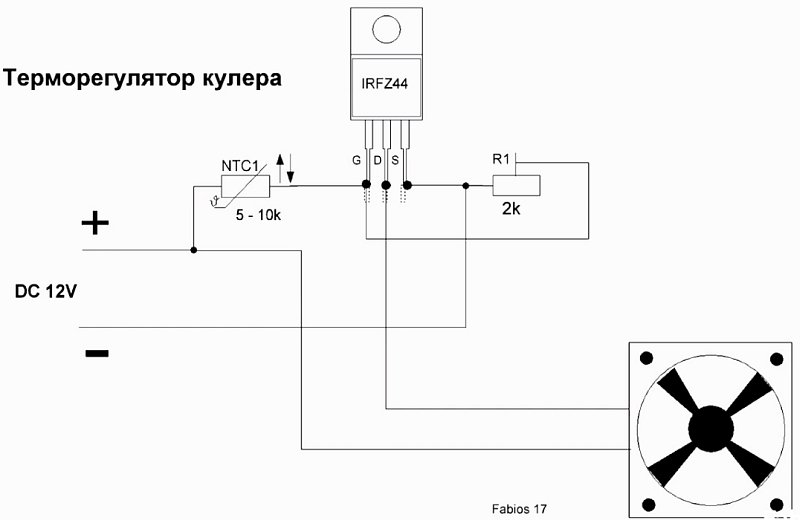 Переменные резисторы, используемые для регулирования Iп:
Переменные резисторы, используемые для регулирования Iп:
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Железняк или сердечник ротора напрессовывается непосредственно на вал.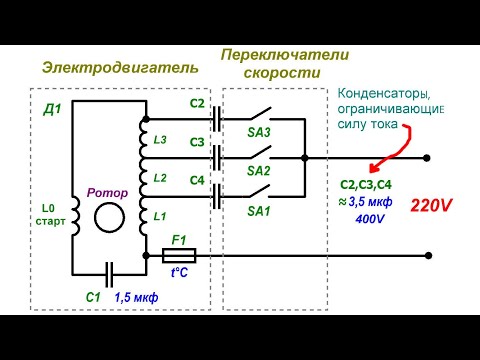 Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.

При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.

- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Прибор триак
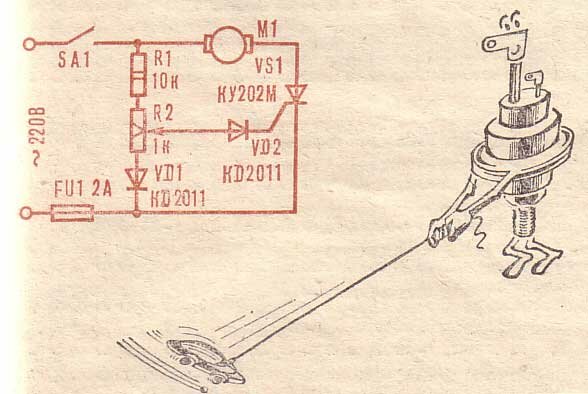
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
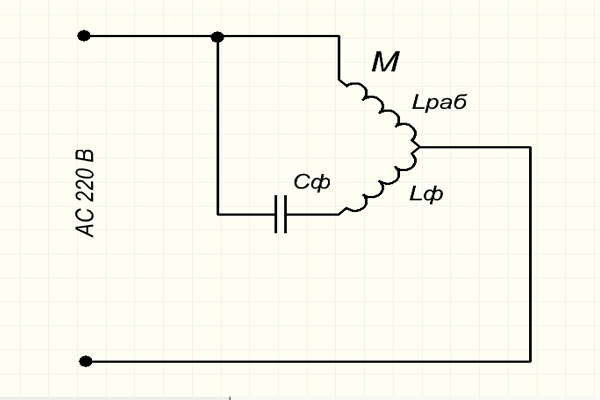
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
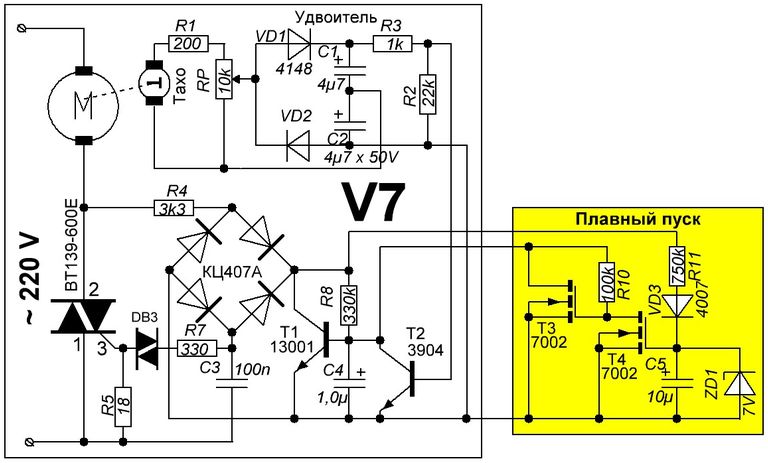
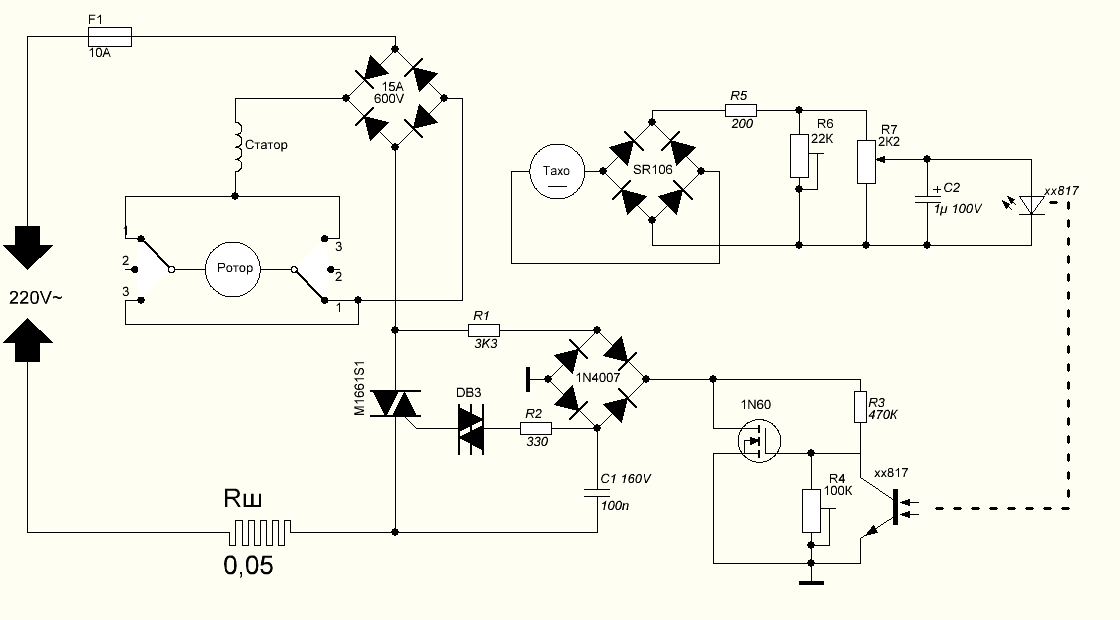
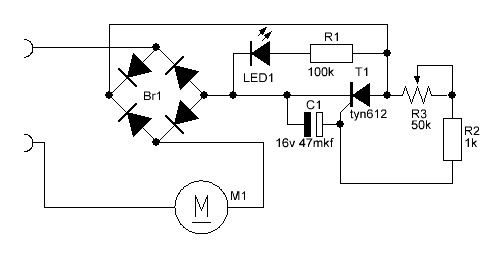
Схема простого регулятора скорости мотора
Конечно скорость лучше всего контролируется инвертором, но для несложных любительских устройств должно быть достаточно простых самодельных регуляторов.![]()
Полезное: Озонатор воздуха своими руками (для дома или авто)
Минимальные обороты получились с этой схемой 200 об / мин. С2 это плавный старт. Плавный пуск работает отлично на холостом ходу, хотя с нагрузкой на вал, при необходимости, подберите R5 = 0 – 3 кОм в зависимости от нагрузки; R6 = 18 – 51 Ом в зависимости от симистора; R4 = 3 – 10 кОм – это защита Т3; RR1 = 2 -10 кОм – регулятор скорости связан с сетью гальванически, требуется защита от сетевого напряжения. Есть потенциометры с пластиковой осью, желательно использовать именно их.
изменение скорости вращения и схемы на тиристорах • Мир электрики
Содержание
- Общие сведения
- Короткозамкнутый и фазный роторы
- Конструктивные особенности
- Принцип работы
- Методы настройки оборотов
- Виды и критерии выбора
- Устройство на тиристорах
- Транзисторный тип
- Регулирование за счет частоты
- Изготовление своими руками
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора.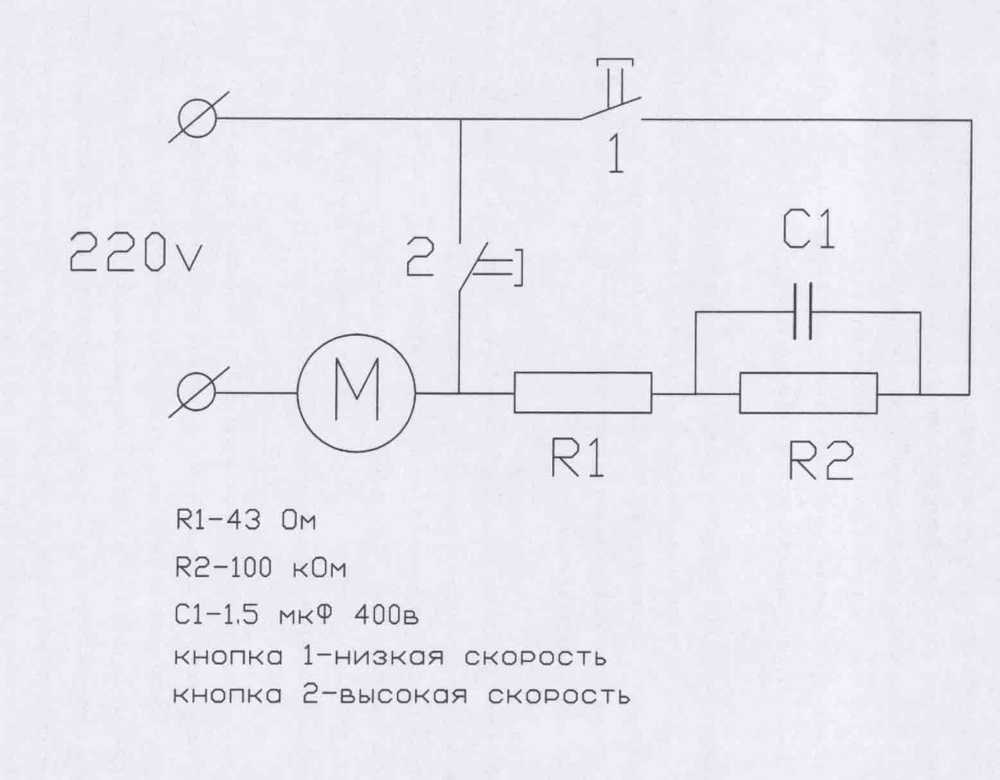 Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
- Однофазные.
- Трехфазные.
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору. Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.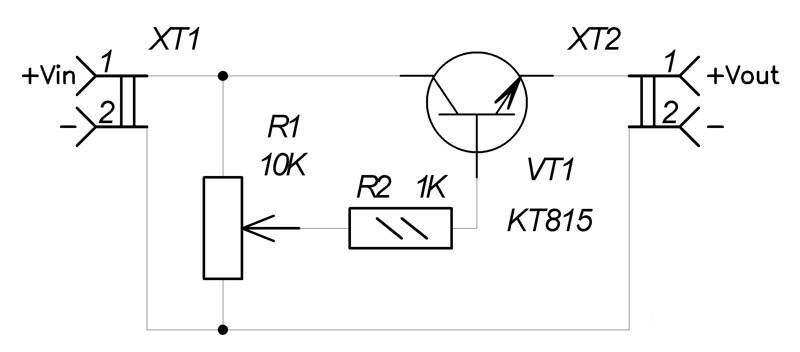
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Железняк или сердечник ротора напрессовывается непосредственно на вал. Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом.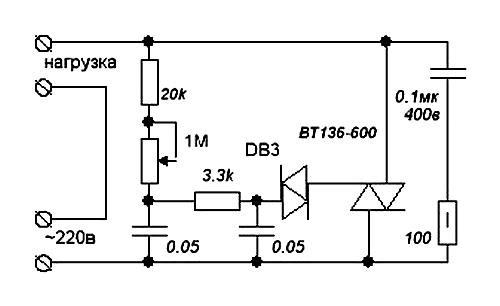 При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.

При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U.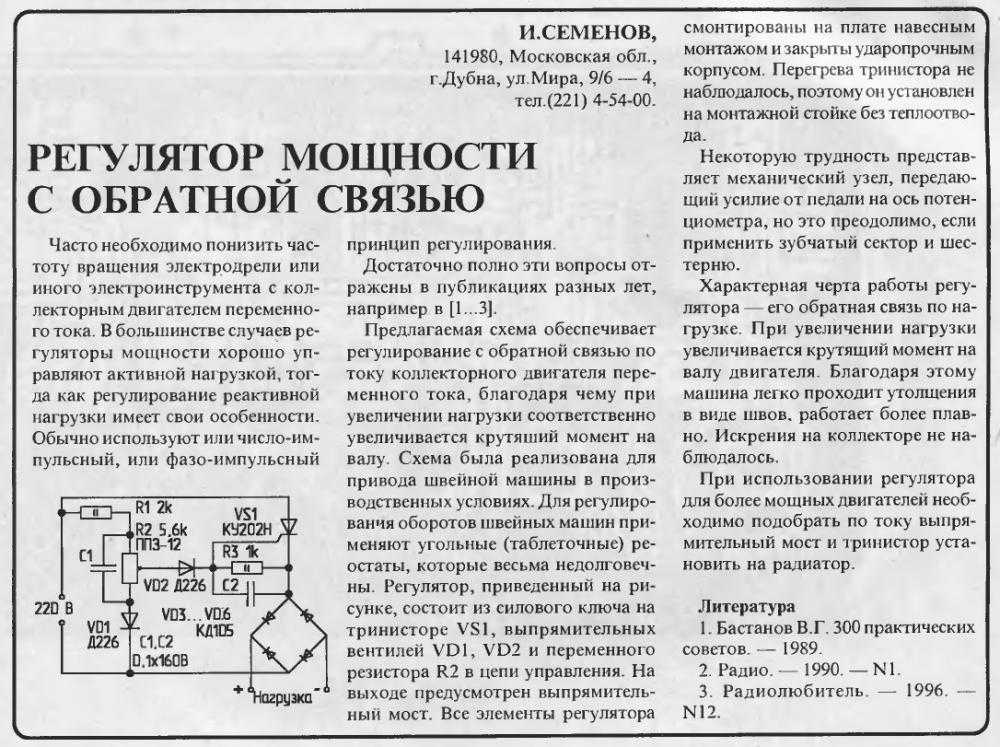 Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.

- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора.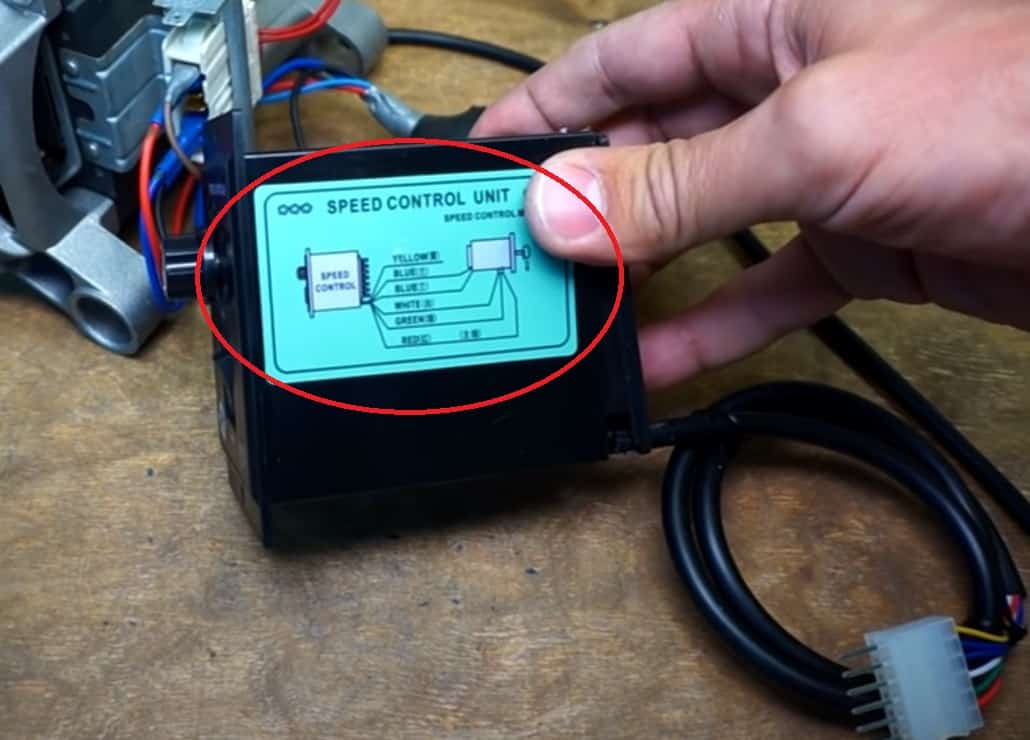 К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Изготовление своими руками
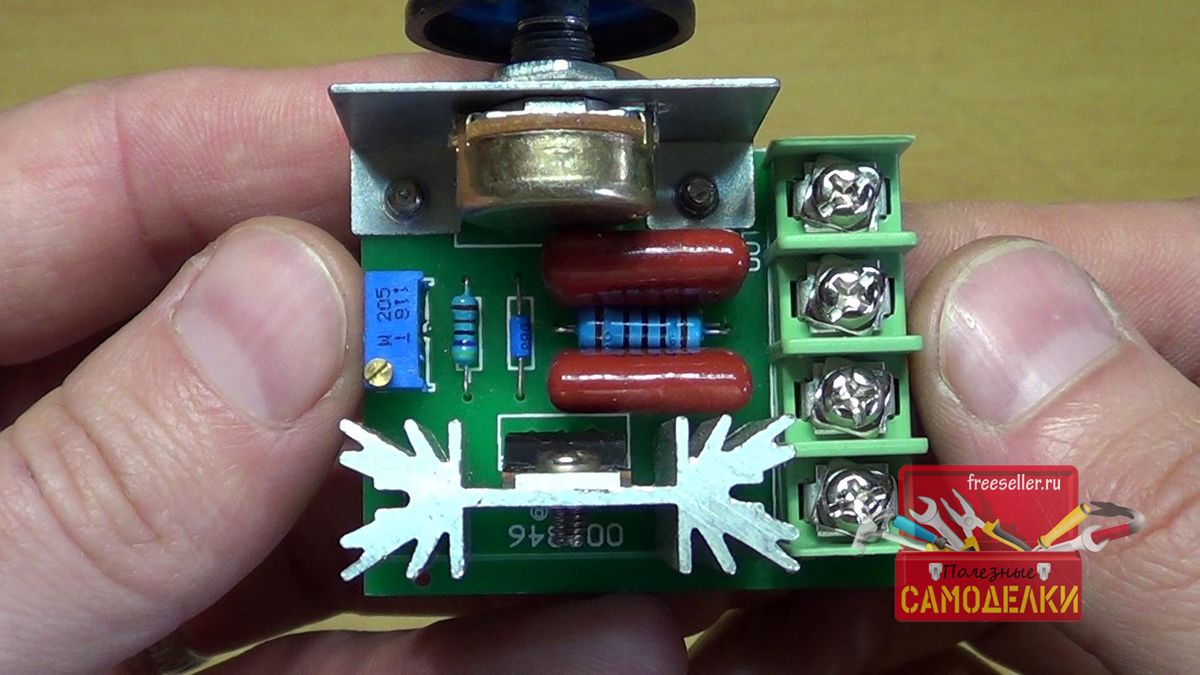
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Значительное снижение скорости однофазного двигателя переменного тока
\$\начало группы\$
У меня есть однофазный двигатель переменного тока мощностью 1/3 л.с., вращающий мой сверлильный станок. С максимальным уменьшением, доступным через шкивы, он по-прежнему работает в 10 раз быстрее для одного из моих приложений (т. Е. Патрон вращается со скоростью 360 об / мин, а мне нужно около 30 об / мин).
Я был бы рад уменьшить выходной крутящий момент пропорционально уменьшению скорости, но я читаю об этом часами и даже не могу определить:
- Для каких типов небольших двигателей переменного тока возможно устойчивое снижение скорости?
- Какими средствами? Триак? ШИМ? ЧРП?
- В какой степени? Возможно ли снижение скорости в 10 раз?
И тут такая проблема, что я даже не могу точно сказать, какой у меня асинхронный двигатель. Я вижу, что к нему прикручен конденсатор емкостью 16 мкФ (рабочий?). И вот картинка:
Я вижу, что к нему прикручен конденсатор емкостью 16 мкФ (рабочий?). И вот картинка:
Я еще больше сбит с толку, потому что типичные хаки для этой проблемы включают в себя сотни долларов на редуктор или специальные двигатели. Весь этот сверлильный станок стоит 100 долларов, поэтому мне трудно поверить, что нет решения дешевле 100 долларов. Например, я был бы рад заменить двигатель на такой, который работает от бытовой сети со скоростью около 200 об/мин вместо родных ~1800 об/мин. Но я не смог найти даже это.
Не упущено ли какое-то фундаментальное ограничение на создание крутящего момента от бытового переменного тока при очень низких скоростях вращения?
- двигатель
- переменный ток
- двигатель-контроллер
\$\конечная группа\$
4
\$\начало группы\$
Опыт: Используйте промежуточный вал и дополнительные ремни/шкивы и/или замените на другой двигатель (постоянный ток с регулятором скорости постоянного тока или 3-фазный + VFD (преобразователь частоты) с регулируемой скоростью.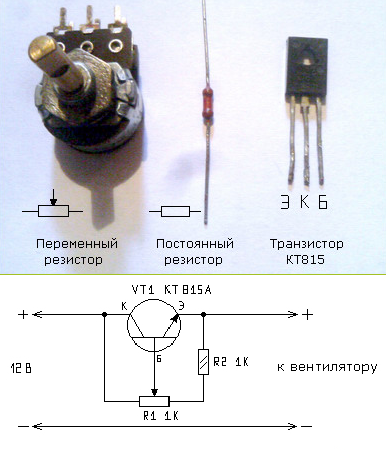 ) Двигатель постоянного тока и Контроль скорости часто можно восстановить бесплатно с беговой дорожки, которую кто-то отказался использовать.
) Двигатель постоянного тока и Контроль скорости часто можно восстановить бесплатно с беговой дорожки, которую кто-то отказался использовать.
Фундаментальное ограничение медленной работы асинхронных двигателей переменного тока (60 циклов в секунду, 3600 циклов в минуту) переменного тока заключается в том, что ваш тип двигателя имеет 4 полюса, если он работает на 1800 об/мин, поэтому вам потребуется 36 полюсов, чтобы повернуть на 200 об/мин. Об/мин при 60-тактном переменном токе. Это действительно была бы очень редкая птица. Вам на самом деле повезло, если ваш двигатель сверлильного станка не 3600 об/мин с самого начала…
Другие ограничения (которые относятся к «универсальным» двигателям, скорость которых легче регулировать, но они ужасно шумные по сравнению с ними)(и также к постоянному току и в несколько меньшей степени 3-фазный + ЧРП) ужасный (хуже, чем линейное уменьшение) крутящий момент и плохое охлаждение / перегрев, поскольку вентиляторы двигателя (встроенные) не работают на разумной скорости для охлаждения. это.
Вы можете найти мотор-редукторы (нормальная скорость двигателя 3600 или 1800 об/мин и прикрепленный редуктор), которые работают так медленно, но вам не понравится цена, особенно если вам нужна большая мощность/крутящий момент.
Первоначальная стоимость сверлильного станка, с которого вы начинаете, мало влияет на стоимость выполнения с ним нестандартных операций (и может сделать более дорогую модель с лучшими функциями, такими как двойное уменьшение или уже встроенный более широкий диапазон уменьшения). в конце концов выглядят дешевле.) С другой стороны, вы можете начать с совершенно не того инструмента — токарные станки для металлообработки не так уж сложно найти, используемые по доступной цене в умеренных размерах, и, как правило, они имеют стандарт настройки «задней передачи», который предлагает очень низкий скорость и высокий крутящий момент. Хорошо подходит для намотки катушек (наверное, так как вы не говорите, и это EE.)
\$\конечная группа\$
3
\$\начало группы\$
Вот что бывает, когда «хорошие» решения недостаточно дешевы: это серийный мотор-редуктор 12В 1А (предназначен для изготовления латунных гильз), закрепленный жесткой муфтой на приводном валу дрели. На самых высоких шкивах патрон вращается со скоростью около 50 об/мин. Красота в неряшливости?
На самых высоких шкивах патрон вращается со скоростью около 50 об/мин. Красота в неряшливости?
\$\конечная группа\$
3
\$\начало группы\$
Проблема на самом деле в типе однофазного двигателя, который у вас есть, версия с конденсаторным пуском / индукционным запуском (CS/IR). Он имеет центробежный переключатель внутри, который удаляет пусковой конденсатор и связанную с ним вспомогательную пусковую обмотку из цепи при скорости около 75%. Поэтому, как только ваша скорость падает ниже этого порога, этот переключатель снова включается и снова включает пусковую обмотку и пусковой конденсатор. Они не предназначены для непрерывного использования и сгорают (или, скорее, ваш двигатель отключится от перегрева, если вам повезет). Суть в том, что этот тип двигателя НЕ предназначен для работы и чего-либо, кроме полной скорости, независимо от того, как вы достигаете более низкой скорости.
Возможные варианты, помимо дополнительных механических, — заменить его на трехфазный двигатель и использовать частотно-регулируемый привод, который преобразует однофазный источник в трехфазный выход; перейти на однофазный двигатель PSC (постоянный разделительный конденсатор) и использовать специальный частотно-регулируемый привод, предназначенный для работы этого типа; или перейти на двигатель постоянного тока и привод постоянного тока. Вы ничего не можете сделать с , что конкретный двигатель будет работать, не разрушая его.
\$\конечная группа\$
\$\начало группы\$
Подход с лампочкой элегантен и сработает. Даже если у двигателя есть пусковой колпачок (в отличие от рабочего колпачка), он будет работать, потому что лампочка — это «устройство с отрицательным сопротивлением». Значит в момент включения он как оголенный кусок провода. Когда он нагревается (несколько секунд), его сопротивление увеличивается, поэтому напряжение, подаваемое на двигатель, уменьшается.
В отличие от двигателей постоянного тока, взаимодействие двигателя переменного тока с источником питания довольно сложное. Но лампочка очень универсальна и не будет мешать этим сложным реакциям. Поэтому я ставлю Externet пятерку.
\$\конечная группа\$
\$\начало группы\$
Попробуйте подключить лампочку ПОСЛЕДОВАТЕЛЬНО к шнуру питания. Попробуйте 200 Вт, 150 Вт, 100 Вт.
\$\конечная группа\$
1
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
резисторов — Как уменьшить скорость этого двигателя?
спросил
Изменено 3 года, 6 месяцев назад
Просмотрено 124 раза
\$\начало группы\$
У меня есть старый двигатель Siemens с этой спецификацией: 220В 80 Вт 0.65A
Мне нужно уменьшить скорость (замедлить) этого мотора.
Я знаю, что это легко с чем-то вроде инвертора, но мне просто интересно, как насчет одного резистора? Если можно, то каковы последствия? Это плохо для двигателя (повреждение или авария?)
Если нет, дайте мне знать, как замедлить с помощью резистора или что-то, что вы предложите, пожалуйста.
- резисторы
- двигатель
- скорость
\$\конечная группа\$
\$\начало группы\$
Вы не можете реально изменить скорость без изменения частоты переменного тока.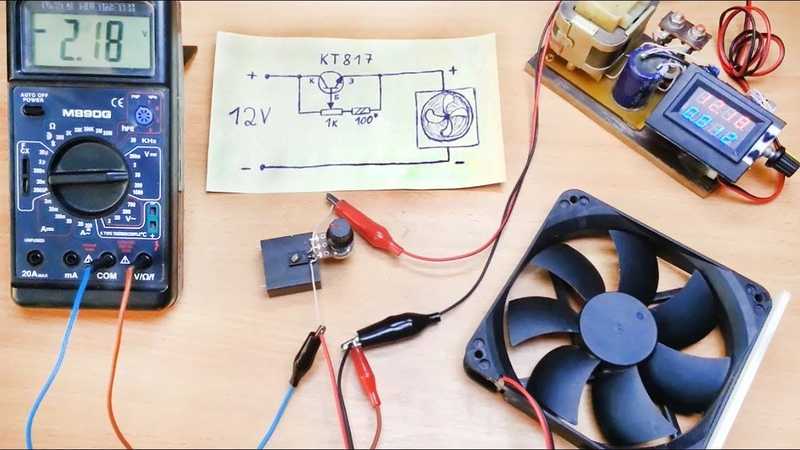 Это синхронный двигатель — он вращается с фиксированной частотой, кратной частоте сети.
Это синхронный двигатель — он вращается с фиксированной частотой, кратной частоте сети.
Если вы понизите напряжение (или уменьшите ток), но оставите нагрузку такой же, она будет вынуждена работать медленнее — у нее недостаточно мощности, чтобы заставить нагрузку вращаться с расчетной скоростью. это плохая вещь .
Если немного снизить напряжение, то под нагрузкой он будет работать медленнее, но перегреется и сгорит. Если опустить больше, то он остановится и сгорит под нагрузкой. Если его достаточно опустить, то он не сгорит, но и не будет вращаться.
Раньше я жил в доме с низким напряжением (напряжение на выходе было около 90В, хотя должно было быть 110В.) Синхронный двигатель в водяном насосе (у нас была своя скважина) сгорел раза три за год до этого мой отец мог бы убедить энергетическую компанию принять меры по поводу низкого напряжения.
\$\конечная группа\$
2
\$\начало группы\$
Двигатель почти наверняка представляет собой асинхронный двигатель с конденсатором, постоянно подключенным к вспомогательной обмотке, двигатель с постоянным разделенным конденсатором (PSC).
