Что такое непрерывные и дискретные сигналы. Как выполняется дискретизация непрерывных сигналов. Какие существуют методы преобразования сигналов. Каковы основные параметры при дискретизации. Как выбрать оптимальную частоту дискретизации.
Понятие непрерывных и дискретных сигналов
Сигналы играют ключевую роль в передаче информации. Они могут быть двух основных видов:
- Непрерывные (аналоговые) сигналы
- Дискретные сигналы
В чем заключается основное различие между ними?
Непрерывный сигнал может принимать любые значения в заданном диапазоне. Его параметр (например, амплитуда) изменяется плавно, без разрывов. Примерами непрерывных сигналов являются речь, музыка, показания аналогового термометра.
Дискретный сигнал принимает только определенные фиксированные значения из конечного набора. Между соседними значениями существуют разрывы. К дискретным сигналам относятся цифровые данные, показания электронных часов, тексты.
Основные характеристики непрерывных сигналов
Каковы ключевые параметры, описывающие непрерывные сигналы?
- Амплитуда — максимальное отклонение сигнала
- Частота — число колебаний в единицу времени
- Фаза — смещение сигнала относительно начала отсчета
- Спектр — набор частотных составляющих сигнала
Непрерывные сигналы обладают рядом преимуществ:
- Высокая точность представления информации
- Отсутствие искажений при передаче
- Простота генерации и обработки аналоговыми устройствами
Однако они имеют и недостатки:
- Чувствительность к помехам и шумам
- Сложность хранения и обработки в цифровых системах
Особенности дискретных сигналов
Чем характеризуются дискретные сигналы?
- Конечное число возможных значений
- Привязка к определенным моментам времени
- Представление в виде последовательности чисел
Ключевые параметры дискретных сигналов:
- Частота дискретизации — число отсчетов в единицу времени
- Разрядность — количество бит для представления значения
- Динамический диапазон — отношение максимального значения к минимальному
Преимущества дискретных сигналов:
- Высокая помехоустойчивость
- Простота хранения, передачи и обработки в цифровых системах
- Возможность сжатия информации
Недостатки:
- Потеря части информации при дискретизации
- Ограниченная точность представления значений
Методы преобразования непрерывных сигналов в дискретные
Как осуществляется переход от непрерывного сигнала к дискретному? Существует два основных метода:
Дискретизация по времени
При дискретизации по времени непрерывный сигнал заменяется последовательностью его значений, взятых через равные промежутки времени. Основные параметры:
- Частота дискретизации Fd — число отсчетов в секунду
- Интервал дискретизации Δt = 1/Fd — промежуток между отсчетами
Квантование по уровню
Квантование по уровню заключается в округлении значений сигнала до ближайших фиксированных уровней. Важные характеристики:
- Шаг квантования — расстояние между соседними уровнями
- Число уровней квантования — зависит от разрядности представления
Обычно эти методы применяются совместно, что позволяет получить полностью дискретный цифровой сигнал.
Теорема Котельникова и выбор частоты дискретизации
Как определить оптимальную частоту дискретизации непрерывного сигнала? Ответ на этот вопрос дает теорема Котельникова (теорема отсчетов).
Основной вывод теоремы:
Для точного восстановления непрерывного сигнала частота дискретизации должна быть как минимум в 2 раза выше максимальной частоты в спектре сигнала:
Fd ≥ 2Fmax
где Fd — частота дискретизации, Fmax — максимальная частота в спектре сигнала.
Это условие позволяет избежать наложения спектров (эффекта элайзинга) и потери информации при дискретизации.
Практические рекомендации по выбору параметров дискретизации
Как применить теорему Котельникова на практике? Вот несколько полезных рекомендаций:
- Определите максимальную частоту Fmax в спектре исходного сигнала
- Выберите частоту дискретизации Fd > 2Fmax с запасом 10-20%
- Для речевых сигналов достаточно Fd = 8-16 кГц
- Для качественного звука используйте Fd = 44.1-96 кГц
- В измерительных системах применяйте Fd = (5-10)Fmax
При выборе разрядности квантования учитывайте требуемый динамический диапазон и точность представления значений сигнала.
Восстановление непрерывного сигнала из дискретного
Возможно ли восстановить исходный непрерывный сигнал из его дискретных отсчетов? Да, для этого используются следующие методы:
- Ступенчатая аппроксимация — простейший метод, дает грубое приближение
- Линейная интерполяция — соединение отсчетов прямыми линиями
- Восстановление рядом Котельникова — теоретически точный метод
- Использование сглаживающих фильтров — практичный подход
Качество восстановления зависит от частоты дискретизации и метода интерполяции. При соблюдении теоремы Котельникова возможно практически идеальное восстановление сигнала.
Применение дискретизации сигналов
Где используется преобразование непрерывных сигналов в дискретные?
- Цифровая обработка сигналов
- Системы цифровой связи
- Цифровая звукозапись
- Цифровое телевидение
- Измерительные системы
- Системы управления
Дискретизация позволяет применять цифровые методы обработки к исходно аналоговым сигналам, что дает ряд преимуществ в помехоустойчивости, гибкости алгоритмов, возможностях хранения и передачи информации.
Заключение
Понимание принципов и методов преобразования непрерывных сигналов в дискретные крайне важно для работы с цифровыми системами обработки информации. Правильный выбор параметров дискретизации позволяет сохранить всю значимую информацию исходного сигнала и избежать искажений при его восстановлении. Современные цифровые технологии во многом основаны на возможности представления реальных аналоговых процессов в виде дискретных цифровых данных.
какой из непрерывных сигналов 1)-3) более всего соответствует данному дискретному сигналу?
70 БАЛЛОВ СИРИУС PYTHON ВВЕДЕНИЕ: Палиндром Дано слово, состоящее только из заглавных и строчных латинских букв. Проверьте, верно ли, что это слово чи … тается одинаково как справа налево, так и слева направо (то есть является палиндромом), если считать заглавные и строчные буквы неразличающимися. Выведите слово YES, если слово является палиндромом, и слово NO, если не является. Решение необходимо сдать в виде функции IsPalindrome(S), возвращающей значение типа bool. При решении этой задачи нельзя пользоваться вспомогательными массивами или строками.
Умоляю ребят мне мне очень сложно решить помогите полностью с задачей пожалуйста Python Задача 2. Поступление Что нужно сделать Степан хочет поступить … на бюджет в престижный университет, но для этого ему нужно хорошо сдать три экзамена и набрать как минимум 270 баллов. Напишите программу, которалғзапрашивает у пользователя результаты ЕГЭ по трём экзаменам и проверяет, поступил он на бюджет или нет. Выведите соответствующее сообщение. Пример 1: Введите количество баллов по русскому языку: 90 Введите количество баллов по математике: 90 Введите количество баллов по информатике: 90 Поздравляю, ты поступил на бюджет!
Информационными моделями являются: таблицы карты диаграммы словесные описания компьютер ярлыки
Реши задачу с помощью таблицы. На завтрак Глеб может выбрать плюшку, бутерброд, пряник или кекс, а запить их он может кофе или соком. Из скольких вари … антов завтрака Глеб может выбирать?
помогите срочноНа одной дороге находятся поселения K и R, между которыми 76 км.Автомобиль выехал из поселения R в направлении, противоположном K, со с … коростью 51 км/ч.Необходимо составить математическую модель, которая будет описывать положение автомобиля относительно поселения K через t часов.
Задание 4 (40 баллов). Представьте ответы на вопросы в виде реферата. Отформатируйте реферат. Предусмотрите наличие титульной страницы, содержания, сп … иска использованной литературы (не менее 5 источников). 1) Что такое стиль в текстовом процессоре MS Word? 2) Каковы преимущества стилевого форматирования перед ручным? 3) Какие основные виды стилей существуют в MS Word? 4) Какова иерархия применения стилей к абзацу? 5) Какие способы для применения стилей существуют? 6) Как выделить все абзацы, имеющие один и тот же стиль? 7) Как создать новый стиль абзаца или стиль символа и применить его для оформления текстового документа? 8) В каком режиме просмотра документов следует применять стили? 9) Какие стандартные заголовочные стили существуют? Почему заголовки в любом случае необходимо оформлять с помощью стилей? 10) Как можно использовать стили для создания структуры документа? помогитее пожалуйста
Давайте воспользуемся знаниями о таблицах данных для хранения ваших персональных данных. Это будут баллы за все домашние задания за третий модуль. Зап … олните списки urok1, urok2, urok3 и urok4 вашими баллами за домашние задания. Если дз не было или вы его не выполнили, то вместо баллов напишите слово “нет”. После этого составьте таблицу данных, каждая строка таблицы — баллы за определенный урок. нужна таблица и обьясните
Написать код ТОЛЬКО НА С++ Последовательность состоит из различных натуральных чисел и завершается числом 0. Определите значение второго по величине э … лемента в этой последовательности. Числа, следующие за числом 0, считывать не нужно. Вводится последовательность целых чисел, оканчивающаяся числом 0 (само число 0 в последовательность не входит). Выведите ответ на задачу. ПРИМЕР Ввод: 1 7 9 0 Вывод: 7
С++ Степень! Даю 25 баллов, только на С++! есть код прошедший 12 тестов из 15(см. текстовый файл) Для того чтобы проверить, как её ученики умеют счита … ть, Мария Ивановна каждый год задаёт им на дом одну и ту же задачу — для заданного натурального A найти минимальное натуральное N такое, что N в степени N (N, умноженное на себя N раз) делится на A. От года к году и от ученика к ученику меняется только число A. Вы решили помочь будущим поколениям.9 — на всякий случай; вдруг Мария Ивановна задаст большое число, чтобы «завалить» кого-нибудь…).Выходные данныеВыведите число N.ПримерыВводВывод1184
INFOблог: Непрерывные и дискретные сигналы
В предыдущем посте мы рассматривали различные определения понятия «информация» и пришли к выводу, что информация может быть определена множеством разных способов в зависимости от выбранного подхода. Но об одном мы можем говорить однозначно: информация — знания, данные, сведения, характеристики, отражения и т.д. — категорияТогда материальный объект (или среда), с помощью которого представляется та или иная информация будет являться носителем информации, а изменение какой-либо характеристики носителя мы будем называть сигналом.
Например, представим равномерно горящую лампочку, она не передает никакой информации. Но, если мы будем включать и выключать лампочку (т.е. изменять ее яркость), тогда с помощью чередований вспышек и пауз мы сможем передать какое-нибудь сообщение (например, посредством азбуки Морзе). Аналогично, равномерный гул не дает возможности передать какую-либо информацию, однако, если мы будем изменять высоту и громкость звука, то сможем сформировать некоторое сообщение (что мы и делаем с помощью устной речи).
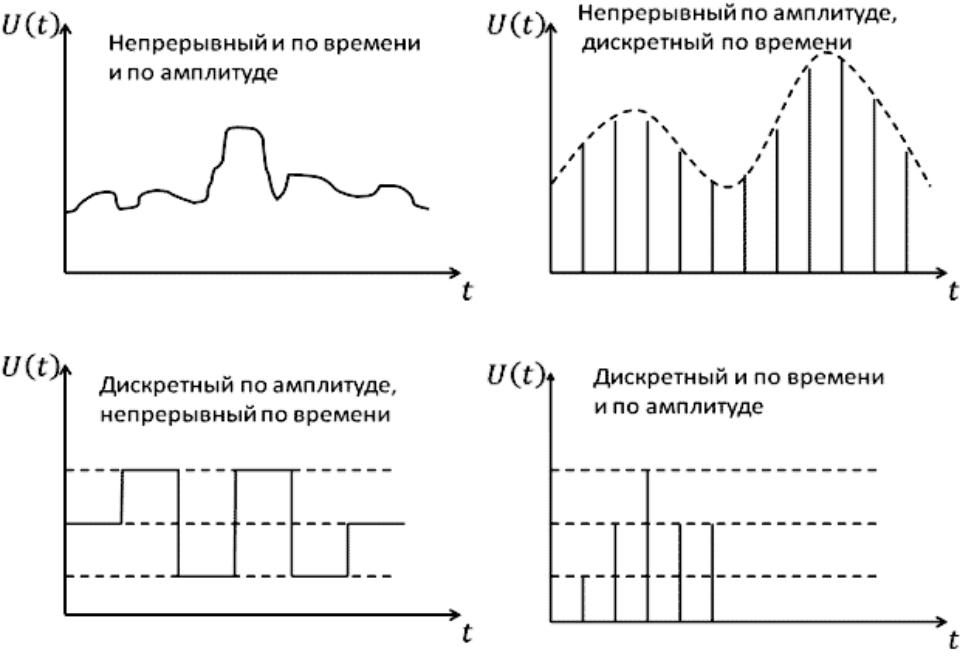
При этом сигналы могут быть двух видов: непрерывный (или аналоговый) и дискретный.
В учебнике даны следующие определения.
Непрерывный сигнал принимает множество значений из некоторого диапазона. Между значениями, которые он принимает, нет разрывов.
Дискретный сигнал принимает конечное число значений. Все значения дискретного сигнала можно пронумеровать целыми числами.
Немного уточним эти определения.
Сигнал называется непрерывным (или аналоговым), если его параметр может принимать любое значение в пределах некоторого интервала.
Сигнал называется дискретным, если его параметр может принимать конечное число значений в пределах некоторого интервала.
Графики этих сигналов выглядят следующим образом
Примерами непрерывных сигналов могут быть музыка, речь, изображения, показания термометра (высота столба ртути может быть любой и представляет собой ряд непрерывных значений).
Примерами дискретных сигналов могут быть показания механических или электронных часов, тексты в книгах, показания цифровых измерительных приборов и т.д.
Вернемся к примерам, рассмотренным в начале сообщения — мигающая лампочка и человеческая речь. Какой из этих сигналов является непрерывным, а какой дискретным? Ответьте в комментариях и аргументируйте свой ответ. Можно ли непрерывную информацию преобразовать в дискретную? Если да — приведите примеры.
1.3 Сигналы непрерывные и дискретные. Преобразование сигналов.
Информация (сообщения и сигналы) может существовать в двух формах: непрерывной и дискретной.
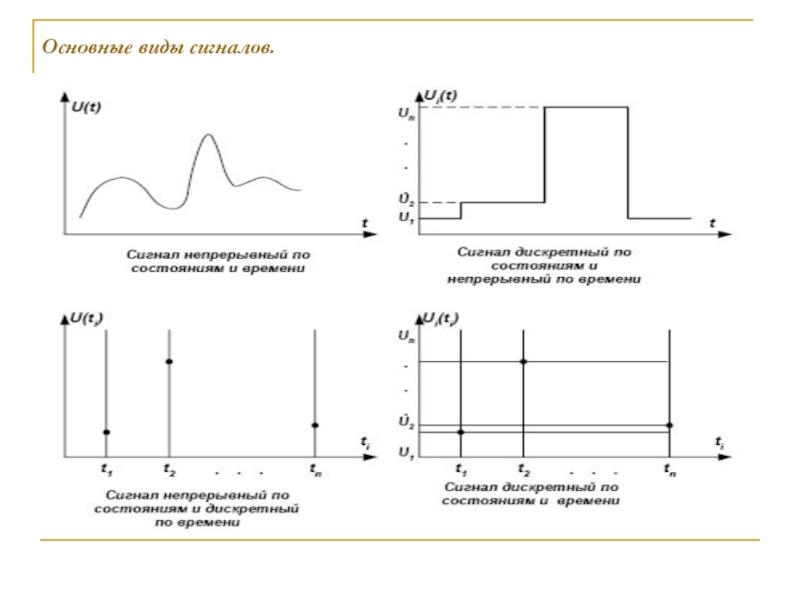
В большинстве случаев информация о протекании того или иного физического процесса вырабатывается соответствующими датчиками в виде сигналов, непрерывно изменяющихся во времени. Такой сигнал можно представить в виде непрерывной функции Х(t) непрерывного аргументаt– функции, которая может принимать любые вещественные значения в интервале (Xmin,Xmax) для любых значений аргументаtв интервале (0, Т) (рис. 1.10а). Множество значений непрерывной функции бесконечно.
Дискретные сообщения и сигналы состоят из конечного множества элементов, поступающих последовательно во времени. Набор элементов (символов) составляет алфавит источника дискретной информации. Обычно элементами дискретных сигналов являются последовательности чисел.
Для передачи информации по каналу связи и ее дальнейшей обработки средствами вычислительной техники непрерывный сигнал преобразуют в дискретный. Это преобразование осуществляется с помощью специальных устройств – преобразователей непрерывных сигналов и может быть выполнено дискретизацией во времени, квантованием по уровню или одновременно дискретизацией во времени и квантованием по уровню. При этом соответственно возможны три разновидности сигналов.
Дискретизация во временисостоит в преобразовании непрерывного сигнала Х(t) непрерывного аргументаt(рис. 1.10а) в непрерывный сигнал Х(ti) дискретного аргументаtiс шагом дискретизации ∆t(рис. 1.10б). Сигнала Х(ti) может принимать любые значения в интервале (Xmin,Xmax), но лишь на дискретном множестве значений аргументаti(t1,t2, …,tк) в интервале (0, Т). Какой бы малый шаг дискретизации не выбирался, множество значений дискретной функции будет конечно (ограничено). Примером такого сигнала может быть последовательность импульсов, модулированных по амплитуде. Рассмотренная дискретизации является равномерной, т.к. длительность шага дискретизации ∆ti=constна всем интервале (0, Т). Дискретизация может быть и неравномерной, если длительность шага ∆tiразлична (∆ti=var). Методы изменения шага ∆tiмогут быть адаптивными, когда он изменяется в зависимости от текущего изменения параметров сигнала, и программируемыми, когда он изменяется в соответствии с заранее установленной программой или оператором, на основе анализа поступающей информации. Очевидно, что каждый вид дискретизации имеет свои преимущества и недостатки. Все же в основном, применяется равномерная дискретизация, так как алгоритмы и аппаратура для ее реализации существенно проще. Однако очевидно, что при этом в случае медленно изменяющихся сигналов возможны «лишние» отсчеты, т.е. избыточность информации.
Квантование по уровнюсостоит в преобразовании непрерывных значений сигнала Х(ti) в дискретные значения. При этом образуется дискретный сигнал непрерывного аргумента; соседние значения сигнала различаются на элементарную величину ∆Х – квант (рис. 1.10в). Значения, которые может принимать сигнал Х(t), образуют дискретный ряд заранее заданных чисел Х1, Х2,…Хкили уровней 1, 2, 3, 4 и т.д.; значение аргументаtможет быть любым в интервале (0,Т). Примером такого сигнала может быть сигнал на выходе проволочного потенциометра, выходное напряжение которого квантуется за счет скачков сопротивления при перемещении движка с витка на виток. Можно отметить, что квантование по уровню может быть и неравномерным, если ∆Х=var. В основном, используется равномерное квантование — ∆Х=const.
С
Преобразование непрерывного сигнала в дискретный
овместное применение операции дискретизации во времени и квантования по уровнюпозволяет преобразовать непрерывный сигнал Х(t) в дискретный по координатам Х иt(рис. 1.10г). При этом образуется дискретный сигнал дискретного аргумента. Значения сигнала Х(t) и аргументаtобразуют дискретные ряды чисел Х1, Х2, …Хкиt1,t2, …tк, заполняющие интервалы (Хmin,Хmax) и (0,Т) соответственно.Первые две из рассмотренных разновидностей принадлежат дискретно-непрерывным сигналам, а третья – дискретному сигналу. Последний называется также цифровым, так как дискретные значения сигнала обычно представляются в цифровой форме.
Рассмотрим некоторые вопросы, связанные с точностью представления непрерывных сигналов Х(t) в результате дискретизации во времени и квантования по уровню.
В результате дискретизации во времени исходный непрерывный сигнал Х(t) представляется конечной последовательностью отдельных значений Х(ti), измеренных с шагом дискретизации ∆t=ti-ti-1. По значениям Х(ti) можно восстановить исходный сигнал Х(t) с некоторой погрешностью. Функцию Х(t), полученную в результате восстановления (интерполяции) по значениям Х(ti), называют воспроизводящей. При дискретизации возникает вопрос о точности преобразования, которая очевидно зависит от частоты отсчетов функцииfk=1/∆ti, т.е. от выбранного шага дискретизации ∆ti. С одной стороны, очевидно, что с уменьшением (увеличением) ∆tiточность преобразования будет расти (уменьшаться) за счет увеличения (уменьшения) количества отсчетов. С другой стороны, очевидно, что нет смысла стремиться всегда брать отсчеты как можно чаще, независимо от вида сигнала Х(t), так как в случае медленно изменяющегося сигнала Х(t) два соседних значения Х(ti) и Х(ti+1) могут быть настолько связаны (коррелированны) между собой, что по одному из них Х(ti) можно прогнозировать другое Х(ti+1), т.е. никакой новой информации о сигнале при его последующем восстановлении по отсчетам это не дает. Проблема обеспечении точности дискретизации может быть сформулирована следующим образом: с каким максимальным интервалом необходимо брать отсчеты значений сигнала Х(ti), чтобы не пропустить существенных его изменений или, другими словами, какое минимальное количество отсчетов необходимо брать для обеспечения заданной точности воспроизведения сигнала Х(t). От этого, в конечном счете, зависит количество информации, которую надо хранить и преобразовывать в вычислительном устройстве.
Возможны различные пути решения указанной проблемы.
В общем виде задача о представлении некоторого сигнала, являющегося непрерывной функцией времени, в виде конечного числа значений, взятых для дискретных значений времени, решена В.А. Котельниковым. В двух теоремах В.А. Котельников применительно к системе передачи сообщений по линии связи определил, как следует выбрать частоту дискретизации, обеспечивающую по полученным дискретным данным последующее воспроизведение исходного сигнала с заданной точностью.
Теорема 1. Любую функцию Х(t), имеющую спектр частот от 0 доfm, можно представить суммой функцииsinx/x, т.е. рядом:
, (1.51)
где K– целое число,
– отсчеты мгновенных значений функции Х(t) с шагом дискретизации ∆t,
ωm= 2πfm,fm– максимальная частота в спектре частот сигнала Х(t), Гц
ωm– круговая частота.
Из этой теоремы может быть сделан и обратный вывод: любая функция, представленная рядом Котельникова (1.51), имеет спектр, состоящий из частот от 0 до fm.
Теорема 2. Любая функция Х(t), содержащая частоты от 0 доfm, полностью определяется дискретными значениями этой функции, следующими друг за другом с частотой 2fm, т.е. через интервалсек. Таким образом, передачу непрерывного сигнала Х(t) с ограниченным спектром частот, поступающего от какого-либо датчика, можно свести к передаче последовательности дискретных чисел – значений этого сигнала, взятых через интервал времени 1/2fm; число этих значений равно 2fm. Через полученные значения ординат, при обработке результатов измерений, можно провести единственным способом воспроизводящую непрерывную функцию. Поэтому, проще говоря, нет смысла брать отсчеты чаще, чем интервал 1/2fm, так как никакой новой информации о функции при ее последующем восстановлении по отсчетам это не дает. Следует подчеркнуть, что сказанное справедливо только в том случае, если в получаемой информации действительно отсутствует частоты вышеfm.
Теоремы В.А. Котельникова, являющиеся основой современной теории передачи сообщений, очень удобны для исследования всевозможных линий связи, вследствие того, что для этих линий известны частотные характеристики, а спектр передаваемых сигналов ограничен. Другое дело – реальные сигналы, имеющие конечную длительность Т. Для их точного представления, в отличие от моделей сигналов с ограниченным спектром (1.51), необходим спектр, который простирался бы от нуля до бесконечности. Теоретически, чтобы избежать погрешности дискретизации, для такого спектра требуется бесконечно большая частота взятия отсчетов. Практически выбирают такую частоту дискретизации, при которой погрешность не превышает заданной величины В этой связи теорему 2 В.А. Котельникова можно рассматривать как приближенную для функций с неограниченным спектром. На практике частоту отсчетов часто определяют как 2fmk, т.е. интервал между отсчетами
(1.52)
где fm– максимальная допустимая частота в спектре сигнала Х(t)
k– коэффициент запаса (обычно). Так как безграничный частотный спектр заменяется ограниченным, вне которого спектральная плотность принимается равной нулю, то погрешность дискретизации будет определяться соотношением составляющих, лежащих внутри спектра и вне его.
Другой, практически легко реализуемый путь определения оптимального интервала дискретизации ∆tнепрерывного сигнала Х(t) заключается в построении автокорреляционной функции сигнала и нахождении интервала корреляции τк .Дискретные отсчеты, взятые через интервал ∆t=τк, будут независимыми и информативными; для их обработки могут быть использованы методы математической статистики.
В случае, когда непрерывный сигнал Х(t) представлен своими дискретными значениями, полученными при равномерной или неравномерной дискретизации, он может быть заменен некоторой приближающей (аппроксимирующей) зависимостью. В общем случае исходный сигнал может быть аппроксимирован специальной функцией или полиномом, график которого проходит через известные дискретные значения. Наиболее часто используются степенные алгебраические полиномы, но так как обычно исходный сигнал задается в графическом или табличном, а не в аналитическом виде, то проведение аппроксимации полиномами с порядком выше первого затруднительно. При аппроксимации полиномом первого порядка все точки кривой, соответствующие дискретным моментам времени, соединяются отрезками прямых (кусочно-линейная аппроксимация). Алгебраические полиномы удобны для программирования и обработки с помощью вычислительной техники
При квантовании исходного сигнала по уровню возникает погрешность квантования. Так как в процессе преобразования значение сигнала Х(t) обычно отображается ближайшим уровнем квантования Хm, то все значения, кроме кратныхХ, представляются с некоторой погрешностью, максимальное значение которой равно 0,5.
В заключение этого параграфа отметим, что дискретизация и квантование находят широкое применение в преобразователях информации, используемых для связи вычислительных устройств с реальными объектами.
5.3 Квантование непрерывных сигналов — СтудИзба
Квантование непрерывных сигналов и теорема прерывания
Процедура преобразования сигнала непрерывного времени x(t) к дискретному (квантованному по времени) виду называется квантованием (рис. 5.4). Такая процедура отражает как реальные процессы, происходящие в цифровых системах управления, так и математические операции, использующиеся в различных сферах теории информации.
Рис. 5.4. Квантование непрерывного сигнала
В результате квантования получается импульсная последовательность
x(kT) (решетчатая функция), которая при t = kT совпадает с исходным сигналом:
,
Рекомендуемые файлы
а в другие моменты времени она не определена. Потеря информации при квантовании зависит от величины интервала квантования Т или частоты квантования
.
Выбор интервала Т обычно осуществляется из соображений теоретической
возможности восстановления исходного сигнала по полученой в результате квантования импульсной последовательности (дискретной выборке), что отражает содержание известной теоремы прерывания (теоремы Котельникова – Шеннона).
Рассмотрим задачу нахождения сигнала x(t) по известной решетчатой функции x(kT), полагая, что спектр сигнала x(t) ограничен частотой .
Тогда в соответствии с теоремой прерывания, точное восстановление функции x(t) теоретически возможно при условии, что частота квантования
более чем в 2 раза превосходит наибольшую частоту :
,
а для интервала квантования выполняется
Вам также может быть полезна лекция «Критерии качества интерфейса (продолжение)».
.
Приведенный результат широко используется в задачах идентификации динамических систем и дискретизации непрерывных моделей.
Дискретизация непрерывных сигналов
Передача информации на значительные расстояния по дискретным (цифровым) каналам связи, широкое использование микропроцессоров и ЦВМ для обработки информации определяет необходимость преобразование непрерывных аналоговых сигналов в цифровую форму, т. е. их дискретизацию.
Важной задачей при таком преобразовании является выбор интервала дискретизации, поскольку при слишком малом интервале дискретизации может оказаться неоправданно большое число точек отсчета полученного дискретного сигнала и наоборот, при большом интервале дискретизации может иметь место потеря информации.
Поэтому при дискретизации непрерывных сигналов ставится задача определить такой интервал дискретизации (т. е. преобразовать непрерывный сигнал в последовательность дискретных значений, взятых через определенный интервал времени – интервал дискретизации (Δt=Δ), при котором погрешность восстановления исходного непрерывного сигнала по дискретным отсчетам (при последующей обработке) не будет превышать заданного значения.
Для решения этой задачи необходимо получить соотношения, связывающие величину интервала дискретизации Δ с погрешностью восстановления σ исходного сигнала при последующей обработке.
Эти соотношения наиболее просто получаются на основе рассмотрения спектральных свойств непрерывного и дискретного сигналов.
Если какой либо сигнал x(t) представлен в виде суммы гармонических составляющих с различными амплитудами и частотами, то говорят, что осуществляется спектральное разложение этого сигнала [9].
Сумма отдельных гармонических компонент периодического сигнала образуют его спектр
(4.44)
Спектральное представление непрерывного неслучайного сигнала x(t) можно получить, используя разложение в ряд Фурье. При этом сигнал x(t) и его спектральная плотность Sx(ω) взаимнооднозначны и связаны прямым и обратным преобразованием Фурье
(4.45)
Аналогичные соотношения имеют место и для спектральной плотности мощности случайного сигнала x(t)
(4.46)
Пусть x(t) – непрерывный сигнал, который имеет спектр или спектральную плотность, или спектральную плотность мощности Sx(ω), ограниченные частотой
Тогда спектр (спектральная плотность) дискретизированного сигнала Sxд(f) представляет собой результат суммирования бесконечного числа «копий» спектра исходного сигнала, которые располагаются на оси частот через равные промежутки равные значению частоты дискретизации F0, т. е.
(4.47)
Рис.4.6. Спектральные характеристики дискретного сигнала
Если Fmax – верхняя граничная частота в спектре исходного сигнала x(t), то при отдельные лепестки спектральной диаграммы дискретизированного сигнала перестают накладываться друг на друга. Поэтому такой непрерывный сигнал, подвергнутый импульсной дискретизации может быть восстановлен с помощью идеального фильтра нижних частот, если на его вход подать импульсную последовательность вида (4.47).
Наибольшее значение интервала дискретизации составит при этом величину
или (4.48)
что соответствует известной теореме Котельникова.
Если интервал дискретизации будет больше , то смещенные спектры будут перекрываться и точное восстановление исходного сигнала x(t) оказывается невозможным. В этом случае необходимо учитывать связь между интервалом дискретизации и погрешностью восстановления.
Здесь возможно несколько характерных случаев
1. Если сигнал x(t) детерминированный и имеет спектр Sx(f) и задана допустимая погрешность восстановления εmax, то необходимая частота дискретизации может быть определена не явно из соотношения
(4.49)
2. При случайном входном сигнале x(t) и заданном максимальном значении среднеквадратической погрешности восстановления σmax, то необходимая частота дискретизации , при которой может быть обеспечена требуемая точность восстановления, выбирается из условия
(4.50)
где – спектральная плотность мощности случайного сигнала x(t).
Реальные сигналы часто имеют ветви спектральных характеристик большой протяженности с убывающей интенсивностью. Если частоту дискретизации выбирать из полученных ранее зависимостей, то она окажется чрезвычайно высокой.
Как же в этом случае поступить?
Если спектр сигнала имеет бесконечную протяженность (рис. 4.7), то частоту дискретизации выбирают пропорционально Fэ, где Fэ – эффективная ширина спектра, выбираемая из условия
(4.51)
т. е. в предположении, что площадь, ограниченная кривой S(f), равна площади прямоугольника с высотой Sm и основанием Fэ.
Эффективная ширина спектра случайного сигнала Fэ связана с интервалом корреляции τ0 соотношениями
(4.52)
Если дискретизируемый сигнал x(t) представляет собой стационарный случайный процесс с дисперсией и корреляционной функции вида
(4.53)
то спектральная плотность мощности этого сигнала будет иметь вид
(4.54)
где — величина, обратная интервалу корреляции.
Тогда
(4.55)
При этом дисперсия γ2 относительной приведенной погрешности дискретизации для нормального закона распределения случайного сигнала x(t) определяется соотношением
(4.56)
где – дисперсия погрешности дискретизации.
Рис. 4.7. Выбор эффективной частоты спектра сигнала
Рис. 4.8. Связь относительной погрешности дискретизации с частотой дискретизации
Для равномерного закона распределения случайного сигнала x(t) соотношение (4.56) принимает вид
(4.57)
Полученные соотношения позволяют определить частоту дискретизации F0 при известных характеристиках случайного сигнала x(t) с допустимой погрешностью γдиск.
Связь среднеквадратического значения относительной приведенной погрешности дискретизации с частотой дискретизации F0 можно проиллюстрировать следующим графиком (рис. 4.8).
Расчеты показывают, что γдиск=10% достигается при F0=11Fэ, γ=1% — при F0=100Fэ.
Так как при восстановлении дискретизированного сигнала реальный фильтр будет отличаться от идеального, то на практике отношение частот необходимо выбирать больше расчетного.
Узнать еще:
Дискретизация изображения. Переход от непрерывных сигналов и преобразований к дискретным Дискретное изображение
Изображения, состоящие из дискретных элементов, каждый из которых может принимать лишь конечное число различимых значений, изменяющихся за конечное время, называют дискретными. Следует подчеркнуть, что элементы дискретного изображения, вообще говоря, могут иметь неравную площадь и каждый из них может иметь неодинаковое число различимых градаций.
Как было показано в первой главе, сетчатка передает в высшие отделы зрительного анализатора дискретные изображения.
Их кажущаяся непрерывность — лишь одна из иллюзий зрения. Это «квантование» первоначально непрерывных изображений определяется не теми ограничениями, которые связаны с разрешающей способностью оптической системы глаза и даже не морфологическими структурными элементами зрительной системы, а функциональной организацией нервных сетей.
Изображение разбивается на дискретные элементы рецептивными полями, объединяющими то или иное число фоторецепторов. Рецептивные поля производят первичное выделение полезного светового сигнала путем пространственной и временной суммации.
Центральная часть сетчатки (фовеа) занята только колбочками, на периферии вне фовеа имеются как колбочки, так и палочки. В условиях ночного зрения колбочковые поля в центральной части сетчатки имеют приблизительно одинаковую величину (порядка 5″ в угловой мере). Число таких полей в фовеа, угловые размеры которой порядка 90″, около 200. Основную роль в условиях ночного зрения играют палочковые поля, занимающие всю остальную поверхность сетчатки. Они имеют угловой размер порядка 1° по всей поверхности сетчатки. Число таких полей в сетчатке около 3 тыс. Не только обнаружение, но и рассматривание слабо освещенных объектов в этих условиях производится периферийными участками сетчатки.
При увеличении освещенности основную роль начинает играть другая система накопительных ячеек — колбочковые рецептивные поля. В фовеа увеличение освещенности вызывает постепенное уменьшение эффективной величины поля, пока при яркости порядка 100 асб оно не сократится до одной колбочки. На периферии с увеличением освещенности постепенно выключаются (затормаживаются) палочковые поля и вступают в действие колбочковые. Колбочковые поля на периферии подобно фовеальным обладают способностью уменьшаться в зависимости от падающей на них световой энергии. Наибольшее количество колбочек, которое могут иметь колбочковые рецептивные поля с увеличением освещенности, растет от центра к краям сетчатки и на угловом расстоянии 50-60° от центра достигает приблизительно 90.
Можно подсчитать, что в условиях хорошего дневного освещения число рецептивных полей достигает порядка 800 тыс. Эта величина примерно соответствует числу волокон в зрительном нерве человека. Различение (разрешение) объектов при дневном зрении осуществляется главным образом фовеа, где рецептивное поле может сократиться до одной колбочки, а сами колбочки расположены наиболее плотно.
Если число накопительных ячеек сетчатки может быть определено в удовлетворительном приближении, то для определения числа возможных состояний рецептивных полей еще нет достаточных данных. Могут быть сделаны лишь некоторые-оценки на основе изучения дифференциальных порогов рецептивных полей. Пороговый контраст в фовеальных рецептивных полях в определенном рабочем диапазоне освещенности имеет порядок 1. При этом число различимых градаций невелико. Во всем диапазоне перестройки колбочкового фовеального рецептивного поля различается 8-9 градаций.
Период накопления в рецептивном поле — так называемая критическая длительность — определяется в среднем величиной порядка 0.1 сек., но при высоких уровнях освещения может, по-видимому, значительно уменьшаться.
В действительности модель, описывающая дискретную структуру передаваемых изображений, должна быть еще сложнее. Следовало бы учесть взаимосвязь между размерами рецептивного поля, порогами и критической длительностью, а также статистический характер зрительных порогов. Но пока что в этом нет необходимости. Достаточно представить в качестве модели изображения совокупность одинаковых по площади элементов, угловые размеры которых меньше, чем угловые размеры наименьшей разрешаемой глазом детали, число различимых состояний которых больше, чем максимальное число различаемых градаций яркости, а время дискретного изменения которых меньше, чем период мельканий при критической частоте слияния мельканий.
Если заменить изображения реальных непрерывных объектов внешнего мира такими дискретными изображениями, глаз не заметит подмены.* Следовательно, дискретные изображения такого рода содержат по крайней мере не меньше информации, чем воспринимает зрительная система. **
* Цветовые и объемные изображения также можно заменить дискретной моделью.
** Проблема замены непрерывных изображений дискретными имеет важное значение для техники кино и телевидения. Временное квантование лежит в основе этой техники. В импульсно-кодовых телевизионных системах изображение, кроме того, разбивают на дискретные элементы и квантуют по яркости.
Рассмотрим непрерывное изображение – функцию двух пространственных переменных x 1 и x 2 f (x 1 , x 2) на ограниченной прямоугольной области (рисунок 3.1).
Рисунок 3.1 – Переход от непрерывного изображения к дискретному
Введем понятие шага дискретизации Δ 1 по пространственной переменной x 1 и Δ 2 по переменной x 2 . Например, можно представить, что в точках, удаленных друг от друга на расстояние Δ 1 по оси x 1 расположены точечные видеодатчики. Если такие видеодатчики установить по всей прямоугольной области, то изображение окажется заданным на двумерной решетке
Для сокращения записи обозначим
Функция f (n 1 , n 2) является функцией двух дискретных переменных и называется двумерной последовательностью. То есть дискретизация изображения по пространственным переменным переводит его в таблицу выборочных значений. Размерность таблицы (число строк и столбцов) определяется геометрическими размерами исходной прямоугольной области и выбором шага дискретизации по формуле
Где квадратные скобки […] обозначают целую часть числа.
Если область определения непрерывного изображения — квадрат L 1 = L 2 = L, и шаг дискретизации выбран одинаковым по осям x 1 и x 2 (Δ 1 = Δ 2 = Δ), то
и размерность таблицы составляет N 2 .
Элемент таблицы, полученной путем дискретизации изображения, называют «пиксель» или «отсчет» . Рассмотрим пиксель f (n 1 , n 2). Это число принимает непрерывные значения. Память компьютера способна хранить только дискретные числа. Поэтому для записи в памяти непрерывная величина f должна быть подвергнута аналогово-цифровому преобразованию с шагом Df (см. рисунок 3.2).
Рисунок 3.2 – Квантование непрерывной величины
Операцию аналого-цифрового преобразования (дискретизации непрерывной величины по уровню) часто называют квантованием . Число уровней квантования, при условии, что значения функции яркости лежат в интервале _____ _ ____ ___, равно
В практических задачах обработки изображений величина Q варьируется в широких пределах от Q = 2 («бинарные» или «черно-белые» изображения) до Q = 210 и более (практически непрерывные значения яркости). Наиболее часто выбираются Q = 28, при этом пиксель изображения кодируется одним байтом цифровых данных. Из всего вышеуказанного делаем вывод, что пиксели, хранящиеся в памяти компьютера, представляют собой результат дискретизации исходного непрерывного изображения по аргументам (координатам?) и по уровням. (Где и сколько, и всё дискретно) Ясно, что шаги дискретизации Δ 1 , Δ 2 должны выбираться достаточно малыми, для того, чтобы погрешность дискретизации была незначительна, и цифровое представление сохраняло основную информацию об изображении.
При этом следует помнить, что чем меньше шаг дискретизации и квантования, тем больший объем данных об изображении должен быть записан в память компьютера. Рассмотрим в качестве иллюстрации этого утверждения изображение на слайде размером 50×50 мм, которое вводится в память с помощью цифрового измерителя оптической плотности (микроденситометра). Если при вводе линейное разрешение микроденситометра (шаг дискретизации по пространственным переменным) составляет 100 микрон, то в память записывается двумерный массив пикселей размерности N 2 = 500×500 = 25∙10 4 . Если же шаг уменьшить до 25 микрон, то размеры массива возрастут в 16 раз и составят N 2 = 2000×2000 = 4∙10 6 . Используя квантование по 256 уровням, то есть кодируя найденный пиксель байтом, получаем, что в первом случае для записи необходим объем 0,25 мегабайт памяти, а во втором случае 4 мегабайта.
Аналоговый и дискретный способы представления изображений и звука
Человек способен воспринимать и хранить информацию в форме образов (зрительных, звуковых, осязательных, вкусовых и обонятельных). Зрительные образы могут быть сохранены в виде изображений (рисунков, фотографий и так далее), а звуковые — зафиксированы на пластинках, магнитных лентах, лазерных дисках и так далее.
Информация, в том числе графическая и звуковая, может быть представлена в аналоговой или дискретной форме. При аналоговом представлении физическая величина принимает бесконечное множество значений, причем ее значения изменяются непрерывно. При дискретном представлении физическая величина принимает конечное множество значений, причем ее величина изменяется скачкообразно.
Приведем пример аналогового и дискретного представления информации. Положение тела на наклонной плоскости и на лестнице задается значениями координат X и Y. При движении тела по наклонной плоскости его координаты могут принимать бесконечное множество непрерывно изменяющихся значений из определенного диапазона, а при движении по лестнице — только определенный набор значений, причем меняющихся скачкообразно (рис. 1.6).
Примером аналогового представления графической информации может служить, например, живописное полотно, цвет которого изменяется непрерывно, а дискретного — изображение, напечатанное с помощью струйного принтера и состоящее из отдельных точек разного цвета. Примером аналогового хранения звуковой информации является виниловая пластинка (звуковая дорожка изменяет свою форму непрерывно), а дискретного — аудиокомпакт-диск (звуковая дорожка которого содержит участки с различной отражающей способностью).
Преобразование графической и звуковой информации из аналоговой формы в дискретную производится путем дискретизации , то есть разбиения непрерывного графического изображения и непрерывного (аналогового) звукового сигнала на отдельные элементы. В процессе дискретизации производится кодирование, то есть присвоение каждому элементу конкретного значения в форме кода.
Дискретизация — это преобразование непрерывных изображений и звука в набор дискретных значений в форме кодов.
Вопросы для размышления
1. Приведите примеры аналогового и дискретного способов представления графической и звуковой информации.
2. В чем состоит суть процесса дискретизации?
В систему обработки информации сигналы поступают, как правило, в непрерывном виде. Для компьютерной обработки непрерывных сигналов необходимо, прежде всего, преобразовать их в цифровые. Для этого выполняются операции дискретизации и квантования.
Дискретизация изображений
Дискретизация – это преобразование непрерывного сигнала в последовательность чисел (отсчетов), то есть представление этого сигнала по какому-либо конечномерному базису. Это представление состоит в проектировании сигнала на данный базис.
Наиболее удобным с точки зрения организации обработки и естественным способом дискретизации является представление сигналов в виде выборки их значений (отсчетов) в отдельных, регулярно расположенных точках. Такой способ называют растрированием , а последовательность узлов, в которых берутся отсчеты – растром . Интервал, через который берутся значения непрерывного сигнала называется шагом дискретизации . Обратная шагу величина называется частотой дискретизации ,
Существенный вопрос, возникающий в ходе дискретизации: с какой частотой брать отсчеты сигнала для того, чтобы была возможность его обратного восстановления по этим отсчетам? Очевидно, что если брать отсчеты слишком редко, то в них не будет содержаться информация о быстро меняющемся сигнале. Скорость изменения сигнала характеризуется верхней частотой его спектра. Таким образом, минимально допустимая ширина интервала дискретизации связана с наибольшей частотой спектра сигнала (обратно пропорциональна ей).
Для случая равномерной дискретизации справедлива теорема Котельникова , опубликованная в 1933 году в работе “О пропускной способности эфира и проволоки в электросвязи”. Она гласит: если непрерывный сигнал имеет спектр, ограниченный частотой , то он может быть полностью и однозначно восстановлен по его дискретным отсчетам, взятым с периодом , т.е. с частотой .
Восстановление сигнала осуществляется при помощи функции . Котельниковым было доказано, что непрерывный сигнал, удовлетворяющий приведенным выше критериям, может быть представлен в виде ряда:
.
Эта теорема так же еще называется теоремой отсчетов. Функция называется еще функцией отсчетов или Котельникова , хотя интерполяционный ряд такого вида изучал еще Уитакер в 1915 году. Функция отсчетов имеет бесконечную протяженность по времени и достигает наибольшего значения, равного единице, в точке , относительно которой она симметрична.
Каждую из этих функций можно рассматривать как отклик идеального фильтра низких частот (ФНЧ) на дельта-импульс, пришедший в момент времени . Таким образом, для восстановления непрерывного сигнала из его дискретных отсчетов, их необходимо пропустить через соответствующий ФНЧ. Следует заметить, что такой фильтр является некаузальным и физически нереализуемым.
Приведенное соотношение означает возможность точного восстановления сигналов с ограниченным спектром по последовательности их отсчетов. Сигналы с ограниченным спектром – это сигналы, спектр Фурье которых отличен от нуля только в пределах ограниченного участка области определения. Оптические сигналы можно отнести к ним, т.к. спектр Фурье изображений, получаемых в оптических системах, ограничен из-за ограниченности размеров их элементов. Частоту называют частотой Найквиста . Это предельная частота, выше которой во входном сигнале не должно быть спектральных компонентов.
Квантование изображений
При цифровой обработке изображений непрерывный динамический диапазон значений яркости делится на ряд дискретных уровней. Эта процедура называется квантованием . Её суть заключается в преобразовании непрерывной переменной в дискретную переменную , принимающую конечное множество значений . Эти значения называются уровнями квантования . В общем случае преобразование выражается ступенчатой функцией (рис. 1). Если интенсивность отсчета изображения принадлежит интервалу (т.е., когда ) , то исходный отсчет заменяется на уровень квантования , где – пороги квантования . При этом полагается, что динамический диапазон значений яркости ограничен и равен .
Рис. 1. Функция, описывающая квантование
Основная задача при этом состоит в определении значений порогов и уровней квантования. Простейший способ решения этой задачи состоит в разбиении динамического диапазона на одинаковые интервалы. Однако такое решение не является наилучшим. Если значения интенсивности большинства отсчетов изображения сгруппированы, например, в «темной» области и число уровней ограничено, то целесообразно квантовать неравномерно. В «темной» области следует квантовать чаще, а в «светлой» реже. Это позволит уменьшить ошибку квантования.
В системах цифровой обработки изображений стремятся уменьшить число уровней и порогов квантования, так как от их количества зависит объем информации, необходимый для кодирования изображения. Однако при относительно небольшом числе уровней на квантованном изображении возможно появление ложных контуров. Они возникают вследствие скачкообразного изменения яркости проквантованного изображения и особенно заметны на пологих участках ее изменения.
1. Что такое объект?2. Что такое система?3. Что такое общее имя объекта? Приведите пример.4. Что такое единичное имя объекта? Приведите пример.5.Приведите пример природной системы.6. Приведите пример технической системы.7. Приведите пример смешанной системы.8. Приведите пример нематериальной системы.9. Что такое классификация?10. Что такое класс объектов?
1. 23 вопрос — перечислите режимы работы субд access:Создание таблицы в режиме конструктора;
-создание таблицы с помощью мастера;
-создание таблицы путем ввода данных.
2. что такое векторный формат?
3. можно ли отнести к сервисным программам следующее:
а) программы обслуживания дисков (копирование, лечение, форматирование и прочее)
б) сжатие файлов на дисках (архиваторы)
в) борьбы с комп-ми вирусами и многое другое.
сам думаю что тут ответ Б — прав или нет?
4. что относится к свойства алгоритма (а. дискретность, б. результативность в. массовость, г. определенность, г. выполнимость и понятность) — тут думаю, что все варианты правильные. Прав или нет?
тест 7 леких вопросов с выбором ответа13. Тактовая частота процессора – это:
A. число двоичных операций, совершаемых процессором в единицу времени
B. число вырабатываемых за одну секунду импульсов, синхронизирующих работу узлов компьютера
C. число возможных обращений процессора к оперативной памяти в единицу времени
D. скорость обмена информацией между процессором и устройствами ввода/вывода
14.Укажите минимально необходимый набор устройств, предназначенных для работы компьютера:
A. принтер, системный блок, клавиатура
B. процессор, ОЗУ, монитор, клавиатура
C. процессор, стриммер, винчестер
D. монитор, системный блок, клавиатура
15. Что такое микропроцессор?
A. интегральная микросхема, которая выполняет поступающие на ее вход команды и управляет
Работой компьютера
B. устройство для хранения тех данных, которые часто используются в работе
C. устройство для вывода текстовой или графической информации
D. устройство для вывода алфавитно-цифровых данных
16.Взаимодействие пользователя с программной средой осуществляется с помощью:
A. операционной системы
B. файловой системы
C. приложения
D. файлового менеджера
17.Непосредственное управление программными средствами пользователь может осуществлять с
Помощью:
A. операционной системы
B. графического интерфейса
C. пользовательского интерфейса
D. файлового менеджера
18. Способы хранения данных на физическом носителе определяет:
A. операционная система
B. прикладное программное обеспечение
C. файловая система
D. файловый менеджер
19. Графическая среда, на которой отображаются объекты и элементы управления системы Windows,
Созданная для удобства пользователя:
A. аппаратный интерфейс
B. пользовательский интерфейс
C. рабочий стол
D. программный интерфейс
20. Скорость работы компьютера зависит от:
A. тактовой частоты процессора
B. наличия или отсутствия подключенного принтера
C. организации интерфейса операционной системы
D. объема внешнего запоминающего устройства
Усилители непрерывных сигналов на лампах бегущей волны IFI cерии Т-20
Особенности усилителей- Широкий диапазон усиливаемых частот
- Прочная и надёжная модульная конструкция
- Принудительное воздушное охлаждение
- Экран с подсветкой
- Наличие схемы cамодиагностики
- Интерфейсы IEEE-488 и RS232 для пульта дистанционного управления
- Источник питания на полупроводниковых элементах
Микроволновые усилители на лампах бегущей волны серии T-20 они обеспечивают высокую производительность в РЧ диапазоне. Эти усилители имеют уже устоявшуюся конструкцию, но с добавлением новейших функций в области контроля и мониторинга. Усилители серии T-20 можно назвать лучшими в отрасли за их доказанную на практике надежность и непревзойденную производительность. Линейка усилителей Т-20 включает в себя изделия в широком диапазоне частот: от 2,0 до 18,0 ГГц при мощности усиления 20 Вт.
Безопасность эксплуатации и простота использования имеют первостепенное значение в конструкции изделий компании IFI. Усилители серии Т-20 включают в себя полный набор радиочастотных и аппаратных средств защиты цепей — это высокий КСВ, защита от перегрузок по току и перенапряжению, датчики избыточного теплового и воздушного потока для модуля и системы в целом. Кроме того, усилители серии Т-20 обладают самым современным встроенным интерфейсом, который является сложным, комплексным, но несмотря на это он прост в использовании. Данные РЧ усилители мощности имеют модульную конструкция. Эта конструкция сводит к минимуму внутренние утечки сигнала, электромагнитные помехи и обеспечивает легкий доступ для обслуживания на местах и в ремонтных мастерских.
ЖК-дисплей с подсветкой показывает состояние системы, индикацию питания и информацию самодиагностики. Все рабочие параметры усилителя отображаются на дисплее передней панели, а также на пульте дистанционного управления. Если устройство не работает удаленно, им можно управлять прямо на месте с помощью переключателей на корпусе усилителя.
Для компьютерной автоматизации интерфейсы RS-232 и IEEE-488 входят в стандартную комплектацию. Для удовлетворения индивидуальных потребностей, усилители серии Т-20 можно легко настроить с помощью фильтров гармоник и других опций. Благодаря этим возможностям, надежности и особенности конструкции усилители серии Т-20 являются идеальными микроволновыми усилителями. Различная комплектация и конфигурация данных усилителей может удовлетворить любые потребности.
Стандартные функциональные возможности РЧ микроволновых усилителей мощности на ЛБВ серии Т-20
- Защита системы от стоячих и отражённых волн; устройство нормально функционирует при колебаниях и любом значении величины, фазы и сопротивлении нагрузки; Защита от короткого замыкания
- * Доступны устройства другим значением исходной мощности (уточняйте при заказе)
- Пульт дистанционного управления на интерфейсах GPIB IEEE 488 и RS-232
- РЧ вход для образцов на передней панели и 112R на задней панели
- Внутреннее Предварительное усиление для получения номинальной выходной мощности при уровне входного сигнала 0 дБм или меньше
- Возможность контролировать усиление на месте или дистанционно (в диапазоне 30 дБ)
- РЧ Входной/выходной Разъемы на передней панели, 118R на задней панели
- Система Внутренней диагностики и наличие индикаторов состояния
- Замер общего времени и времени работы в часах
- Защитная блокировка РЧ
- Одновременная индикация бегущей и отраженной мощностей на дисплее, расположенном на передней панели
Технические характеристики РЧ микроволновых усилителей мощности на ЛБВ серии Т-20
- Входное/выходное сопротивление: 50 Ом
- РЧ вход / вход для образцов: тип N (мама), если не указано иное
- РЧ Выходной разъем: тип N (мама), если не указано иное
- Входной КСВ: 2,0: 1
- Выход КСВ: 2,5: 1
- Диапазон рабочих температур: от 0º до 50º C
- Диапазон допустимых температур: от -40º до70º C (макс. высота 15 000 м)
- Влажность: 95% без конденсата
- Высота: 3000 м
- Система охлаждения: воздушная, автономная
- Модуляции: Всех типов, АМ, ФМ, импульсная
- Конфигурация: для монтажа в стойку, как указано в таблице модели, или встраиваемые стойки /шкафы
- Побочная мощность: <-60 дБн ном.
- Стандартное напряжение питания:
- 100, 115, 120 В переменный ток ± 10% 50/60 Гц, одна фаза
- 220, 230, 240 В переменный ток ± 10% 50/60 Гц, одна фаза
- 100/200 В, 115/208 или 200/220/230/240 В ±10% 50/60 Гц, трёхфазное питание и/или 400 Гц;
- Доступны варианты с иным питанием, либо перечисленные в зависимости от наличия
| Усилители на ЛБВ Модель |
Частотный диапазон (ГГц) |
Номинальная мощность (ватт мин.) | P1dB мощность (ватт мин.) |
КУ (дБ мин.) |
Сеть (кВА) |
Вес (фунт.) |
Размеры (дюйм.) (Ш x Г x В) |
| T82-20 | 2.0 – 8.0 | 20 | 10 | 43 | 0.5 | 30 | 19 x 24 x 5.25 |
| T84-20 | 4.0 – 8.0 | 20 | 10 | 43 | 0.5 | 30 | 19 x 24 x 5.25 |
| T104-20 | 4.0 – 10.0 | 20 | 10 | 43 | 0.5 | 30 | 19 x 24 x 5.25 |
| T106-20 | 6.0 – 10.0 | 20 | 10 | 43 | 0.5 | 30 | 19 x 24 x 5.25 |
| T128-20 | 8.0 – 12.4 | 20 | 10 | 43 | 0.5 | 30 | 19 x 24 x 5.25 |
| T1812-20 | 12.0 – 18.0 | 20 | 10 | 43 | 0.5 | 30 | 19 x 24 x 5.25 |
| T184-20 | 4.0 – 18.0 | 20 | 10 | 43 | 0.5 | 30 | 19 x 24 x 5.25 |
| T186-20 | 6.0 – 18.0 | 20 | 10 | 43 | 0.5 | 30 | 19 x 24 x 5.25 |
| T188-20 | 8.0 – 18.0 | 20 | 10 | 43 | 0.5 | 30 | 19 x 24 x 5.25 |
Continuous-Time Signal — обзор
1.1 Введение
Достижения в области цифровых схем и системных технологий оказали огромное влияние на современное общество, связанное с использованием компьютерных технологий для многих приложений, которые влияют на нашу повседневную жизнь. Эти достижения позволили достичь соответствующих достижений в цифровой обработке сигналов (DSP), которые привели к использованию DSP для многих приложений, таких как цифровая фильтрация шума, частотный анализ сигналов, распознавание и сжатие речи, шумоподавление и анализ биомедицинских сигналов, улучшение изображения. и многие другие приложения, связанные с коммуникацией, телевидением, хранением и поиском данных, обработкой информации и т. д.[1].
Сигналом можно считать то, что передает информацию [2]. Например, сигнал может передавать информацию о состоянии или поведении физической системы или физических явлениях, или он может использоваться для передачи информации через среду связи. Сигналы могут использоваться для передачи информации между людьми, между людьми и машинами или между двумя или более машинами. Информация в сигнале представлена как вариации в шаблонах для некоторой величины, которой можно манипулировать, сохранять или передавать с помощью физического процесса [3].Например, речевой сигнал может быть представлен как функция времени, а изображение может быть представлено как функция двух пространственных переменных. Речевой сигнал можно рассматривать как одномерный сигнал, поскольку он имеет одну независимую переменную — время. Изображение можно рассматривать как двумерный сигнал, потому что он имеет две независимые переменные, такие как ширина и высота. Обычно используется соглашение о выражении независимой переменной для одномерных сигналов как время, хотя фактическая независимая переменная может не быть временем.Это соглашение обычно используется в этом тексте.
Независимые переменные для сигнала могут быть непрерывными или дискретными. Сигнал считается непрерывным временным сигналом, если он определен по континууму независимой переменной. Сигнал считается дискретным по времени, если независимая переменная имеет только дискретные значения. Для многих практических приложений значения дискретного сигнала времени часто квантуются, чтобы получить числа, которые могут быть представлены для использования в цифровой схеме или системе.Квантованный сигнал с дискретным временем считается цифровым сигналом. Таким образом, если и независимые, и зависимые переменные определены только в дискретных значениях, то сигнал считается цифровым. Цифровые сигналы могут быть представлены как последовательность чисел конечной точности.
Сигналы играют важную роль во многих действиях в нашей повседневной жизни. Обычно встречаются такие сигналы, как речь, музыка, видео и т. Д. Сигнал является функцией независимой переменной, такой как время, расстояние, положение, температура и давление.Например, речь и музыка, которые мы слышим, представляют собой сигналы, представленные давлением воздуха в определенной точке пространства как функцией времени. Ухо преобразует сигнал в форму, которую мозг может интерпретировать. Видеосигнал в телевизоре состоит из последовательности изображений, называемых кадрами, и каждый кадр можно рассматривать как изображение. Видеосигнал является функцией трех переменных: двух пространственных координат и времени.
Независимые переменные, такие как время, расстояние, температура и т. Д., Для многих сигналов, с которыми мы взаимодействуем ежедневно, можно считать непрерывными.Сигналы с непрерывными независимыми переменными считаются сигналами непрерывного времени. Достижения в области компьютерных технологий и технологий цифровых систем сделали возможным выборку и квантование многих из этих сигналов и их обработку с использованием цифровых схем и систем для практических приложений. Обработка сигналов с помощью компьютеров и других цифровых систем называется цифровой обработкой сигналов. Цифровая обработка сигналов включает в себя выборку, квантование и обработку этих сигналов для многих приложений, включая связь, обработку голоса, обработку изображений, цифровую связь, передачу данных через Интернет и различные виды сжатия данных.
Многие приложения, в которых используются сигналы непрерывного времени, реализованы с использованием цифровой обработки сигналов. Сигналы непрерывного времени квантуются и кодируются в цифровом формате для обработки цифровыми схемами и системами. Выходные данные этих цифровых систем затем либо сохраняются для дальнейшего использования, либо преобразуются в сигналы с непрерывным временем, чтобы соответствовать требованиям приложения. Существует множество причин, по которым цифровая обработка сигналов стала экономически эффективным подходом для реализации многих приложений, включая обработку речи, обработку и передачу видео, передачу сигналов по средствам связи, а также поиск и хранение данных.Некоторые из этих причин следуют [4]:
- 1.
-
Программируемая цифровая система обеспечивает гибкость для настройки системы для различных приложений. Алгоритм обработки можно изменить, изменив параметры системы или изменив порядок операций с помощью программного обеспечения. Реконфигурирование системы непрерывного времени часто означает перепроектирование системы и изменение или модификацию ее компонентов.
- 2.
-
Допуски для компонентов непрерывного времени или аналоговой системы затрудняют разработчикам контроль точности выходного сигнала.С другой стороны, точность выходного сигнала для цифровой системы предсказуема и управляема типом используемой арифметики и количеством битов, используемых в вычислениях.
- 3.
-
Цифровые сигналы могут храниться в цифровых компьютерах, на дисках или других носителях данных без потери точности, кроме той, которая достигается путем получения сигнала с помощью некоторого процесса, такого как преобразование непрерывного сигнала времени в цифровой сигнал . Носители данных для сигналов с непрерывным временем склонны к потере точности сигнала с течением времени и / или к добавлению шума из-за окружающей среды.
- 4.
-
Цифровая реализация позволяет легко разделять данный процессор между несколькими сигналами посредством разделения времени. Несколько цифровых сигналов могут быть объединены в один с помощью мультиплексирования. Затем мультиплексированный сигнал может обрабатываться одним процессором по мере необходимости для конкретного приложения. Соответствующие отдельные выходы затем могут быть отделены от выхода цифровой системы, при этом результаты будут такими же, как если бы сигналы обрабатывались разными системами.Это позволяет использовать одну высокоскоростную цифровую систему для обработки нескольких различных цифровых сигналов с относительно низкими частотами дискретизации.
- 5.
-
Цифровая обработка сигналов может использоваться для простой обработки очень низкочастотных сигналов, таких как сейсмические сигналы. Непрерывная временная обработка этих сигналов потребует очень больших компонентов, таких как большие конденсаторы и / или большие катушки индуктивности.
- 6.
-
Стоимость внедрения цифровых систем часто очень низкая из-за производства большого количества микропроцессоров или микрочипов единой конструкции.Это сделало очень рентабельным внедрение цифровых систем, которые могут быть изготовлены в больших количествах.
- 7.
-
Шифрование может использоваться для обеспечения безопасности цифровых сигналов. Это важно для безопасности в Интернете, а также для безопасности беспроводной связи и защиты личных данных.
Есть некоторые недостатки, связанные с цифровой обработкой сигналов:
- 1.
-
Система цифровой обработки сигнала для конкретного приложения часто более сложна, чем соответствующая система обработки аналогового сигнала.
- 2.
-
Верхняя частота, которая может быть представлена для цифровых систем, определяется частотой дискретизации. Таким образом, системы непрерывного времени все еще используются для многих высокочастотных приложений.
- 3.
-
Цифровые системы используют активные цепи, потребляющие энергию. Аналоговые системы могут быть спроектированы с использованием пассивных цепей, что может привести к созданию системы, потребляющей меньше энергии, чем соответствующая цифровая система.
Дискретная обработка сигналов времени используется во многих приложениях, относящихся к категории информационных технологий.Информационные технологии включают в себя такие разнообразные предметы, как обработка речи, обработка изображений, мультимедийные приложения, вычислительная техника, визуализация данных, управление базами данных, телеконференции, удаленное управление роботами, автономные транспортные средства, компьютерные сети, моделирование и моделирование физических систем и т. Д. Информационные технологии. , который в значительной степени основан на использовании концепций цифровой обработки сигналов, необходим для решения важнейших национальных проблем в таких областях, как фундаментальная наука и инженерия, окружающая среда, здравоохранение и правительственные операции.
В чем разница между непрерывным и дискретным сигналом
Этот пост отвечает на вопрос «В чем разница между непрерывным и дискретным сигналом?» С общей точки зрения сигналы являются функциями одной или нескольких независимых переменных. Есть два типа сигналов — дискретные и непрерывные. Сигналы дискретного времени определяются в дискретный момент времени, а математическая функция принимает дискретный набор значений.
Непрерывные сигналы характеризуются независимыми переменными, которые являются непрерывными и определяют непрерывный набор значений.Обычно переменная указывает сигналы непрерывного времени, а переменная n указывает систему дискретного времени. Также независимая переменная заключена в круглые скобки для сигналов с непрерывным временем и в скобки для систем с дискретным временем. Особенность сигналов с дискретным временем состоит в том, что они дискретизируют сигналы с непрерывным временем.
Сигналы, которые мы описываем, очевидно связаны с такими характеристиками системы, как мощность и энергия. Полная энергия непрерывного сигнала x (t) на интервале t∈ t1, t2 составляет ∫t1t2 | x (t) | 2dt.
Здесь x (t) — величина функции x (t) .
Здесь скобки описывают непрерывный во времени интервал t1≤t≤t2 . Скобки (t1, t2) могут использоваться для описания непрерывного во времени интервала t1
Полная энергия дискретного сигнала xn на интервале n∈n1, n2 равна сумме ∑n1n2 | x [n] | 2.
Где средняя мощность в указанном интервале может быть получена с помощью энергии, полученной с помощью n2 – n1 + 1.
Многие системы существуют на бесконечном интервале независимой переменной. Для этих систем E∞ = ∫ – ∞ + ∞ | x (t) | 2dt
для непрерывного времени и E∞ = ∑ – ∞ + ∞ | x [n] | 2 для дискретного времени.
Некоторые интегралы и суммы могут не сходиться. Эти системы характеризуются бесконечной энергией E∞ → ∞. Для сходящихся интегралов и сумм сигналы имеют конечную энергию E∞ <∞.
Средняя мощность для дискретных и непрерывных сигналов за бесконечный период времени составляет:
P∞ = limN → ∞ 12N + 1 ∑ – N + N | x [n] | 2 и P∞ = limT → ∞ 12T∫ – T + T | x (t) | 2dt.Сигналы с конечной полной энергией E∞ <∞ характеризуются нулевой средней мощностью P∞ = 0. Сигналы с бесконечной полной энергией E∞ = ∞ характеризуются P∞> 0.
Мы рассматриваем здесь наиболее простые и частые преобразования переменных, которые можно комбинировать, что приводит к сложным преобразованиям.
- Сдвиг по времени — это преобразование, когда два сигнала xn и xn – n0 одинаковы, но смещены относительно друг друга. То же самое для непрерывных во времени сигналов x (t) и x (t – t0).
- Инверсия времени — это , когда сигнал x – n получается из xn путем отражения сигнала относительно –n = 0. Для сигналов с непрерывным временем x (–t) является отражением x (t) над t = 0.
- Преобразование x (t) → x (at + b) , — где a и b заданы числами. Здесь преобразование зависит от значения и знака чисел, поэтому, если a> 0 и a> 1 , сигнал расширяется, если a> 0 и a <1, сигнал сжимается, если a <0, сигнал меняется на противоположный. и может быть расширен или сжат, в зависимости от величины и знака сигнала, сдвинутого вправо или влево.Для переменных с дискретным временем преобразования такие же: xn → xan + b.
На рисунке 1 показаны различные виды преобразований сигналов для переменных с непрерывным и дискретным временем.
Рисунок 1. а, б — преобразование временного сдвига для сигналов с непрерывным и дискретным временем; c, d — обратное преобразование для сигналов с непрерывным и дискретным временем; e, f — масштабное преобразование для сигналов с непрерывным и дискретным временем.Периодические сигналы.
Периодические сигналы дискретного времени xn с периодом N, , где N — положительное целое число, характеризуются признаком xn = xn + N для всех значений n .Это уравнение также работает для периода 2N ,… кН . Основной период N0 — это наименьшее значение периода, при котором это уравнение работает. На рисунке 2 показан пример периодического сигнала с дискретным временем.
Рис. 2. Периодический дискретный сигнал.Непрерывные периодические сигналы x (t) с периодом T, характеризуются признаком x (t) = x (t + T). Также мы можем вывести, что x (t) = x (t + mT) , где m — целое число.Основной период T0 — это наименьшее значение периода, при котором это уравнение работает. На рисунке 3 показан пример периодического сигнала с дискретным временем.
Рисунок 3. Периодический непрерывный сигнал.Четные и нечетные сигналы.
Сигнал дискретного времени xn и сигнал непрерывного времени x (t) , даже если они равны своим обратным во времени аналогам, xn = x – n и x (t) = x (–t) . А сигналы нечетные, если xn = –xn и x (t) = — x (–t) . Нечетные сигналы всегда равны 0 при n = 0 , или t = 0.
На рисунках 4 и 5 показаны четные и нечетные сигналы с дискретным и непрерывным временем.
Рисунок 4. Четные и нечетные сигналы с дискретным временем. Рисунок 5. Четные и нечетные сигналы с непрерывным временем.Любые сигналы с непрерывным или дискретным временем могут быть представлены как сумма нечетных и четных сигналов. Для сигналов с непрерывным временем:
Ev {x (t)} = 12 [x (t) + x (–t)] Od {x (t)} = 12 [x (t) — x (–t)]для сигналов с дискретным временем:
Evxn = 12 (xn + x – n) Odxn = 12 (xn + x – n)Дополнительные учебные руководства также можно получить через сообщество Reddit r / ElectronicsEasy .
Типы сигналов
Определение непрерывных и дискретных сигналов
Сигнал непрерывного времени:
Сигнал непрерывного времени — это «функция переменной непрерывного времени, которая имеет несчетный или бесконечный набор чисел в своей последовательности».
Сигнал непрерывного времени может быть представлен и определен в любой момент времени в своей последовательности. Сигнал непрерывного времени также называется аналоговым сигналом. Это непрерывная функция времени, определенная на реальной линии (или оси) R .Он имеет непрерывную амплитуду и время. То есть, сигналы непрерывного времени будут иметь определенное значение в любой момент времени.
Сигнал с непрерывным временем нарисован, как показано на рисунке 1.
Примерами сигналов с непрерывным временем являются синусоидальные волны, косинусные волны, треугольные волны и т. Д. Электрические сигналы также ведут себя как сигналы непрерывного времени, когда они выводятся пропорционально физическим параметрам, таким как давление, температура, звук и т. Д.
Сигнал дискретного времени:
Сигнал дискретного времени — это «функция переменной дискретного времени, которая имеет счетный или конечный набор чисел в своей последовательности».Это цифровое представление сигнала непрерывного времени.
Сигнал дискретного времени может быть представлен и определен в определенные моменты времени в его последовательности. То есть сигнал с дискретным временем может быть определен только в моменты дискретизации. Цифровой сигнал может быть получен из сигнала с дискретным временем путем квантования и кодирования значений выборки. Сигналы с дискретным временем представлены двоичными битами и хранятся на цифровом носителе.
Сигнал с дискретным временем отображается, как показано на рисунке 2.
Выходные данные компьютера являются одним из примеров сигналов с дискретным временем.
В чем разница между сигналами с непрерывным и дискретным временем?
Различия между непрерывными и дискретными сигналами заключаются в следующем:
В чем разница между дискретными и цифровыми сигналами?
Различия между дискретными и цифровыми сигналами заключаются в следующем:
Является ли цифровой сигнал сигналом с дискретным временем?
Цифровой сигнал может быть дискретным или непрерывным.То есть все цифровые сигналы не являются сигналами дискретного времени.
Цифровой сигнал — это электрический сигнал, который имеет дискретное значение в каждой точке выборки. Он используется для представления данных в виде последовательности дискретных значений.
В цифровом сигнале сигнал преобразуется в двоичные биты. Двоичные биты — это 0 и 1. Двоичный бит 1 используется для обозначения положительного значения цифрового сигнала, а бит 0 используется для представления нулевого значения или нулевого значения цифрового сигнала. Цифровые сигналы обычно обозначаются прямоугольной волной.Переход (или изменение состояния) цифрового сигнала от одного битового значения к другому происходит мгновенно. То есть цифровой сигнал изменяется мгновенно и в любой момент может принимать одно из конечного числа значений.
Запишите преимущества цифрового сигнала следующим образом:
- Влияние шума, искажений и помех для цифровых сигналов намного меньше, поскольку они менее подвержены влиянию.
- Цифровые данные сжимаются сравнительно легче, чем аналоговые.Следовательно, эффективность передачи больше для цифровых сигналов, чем для аналоговых сигналов.
- Цифровые сигналы обеспечивают лучшую защиту.
- Цифровые сигналы легко модернизируются.
- Цифровые сигналы можно легко сконструировать по сравнению с аналоговыми сигналами.
- Цифровые сигналы улучшают характеристики ошибок и, следовательно, улучшают качество сигнала.
- Цифровые сигналы имеют меньшую стоимость, чем аналоговый сигнал для передачи данных.
- Цифровые сигналы могут быть легко сохранены с меньшим объемом памяти за меньшую продолжительность, чем аналоговые сигналы.
Знакомство с сигналами
Знакомство с сигналами- Определение сигналов
- Типы сигналов
- Свойства сигнала
- Пример сигналов
- Различные сигналы
- Свойство периодичности
- Разница между системами CT и DT
- Дельта функция
- разворот времени
- сдвиг во времени
- замедление / сокращение времени
- Разница между CT и DT
Почему цифровая обработка сигналов?
Если вы работаете на компьютере или используете компьютер для манипулирования данными, вы почти наверняка работаете с цифровыми сигналами.Все манипуляции с данными являются примерами цифровой обработки сигналов (для наших целей обработка сигналов с дискретным временем как экземпляры цифровой обработки сигналов). Примеры использования DSP:- Фильтрация: устранение шума из сигналов, таких как речевые сигналы и другие аудиоданные, астрономические данные, сейсмические данные, изображения.
- Синтез и манипуляции: например, синтез речи, синтез музыки, графика.
- Анализ: сейсмические данные, атмосферные данные, анализ фондового рынка.
- Голосовая связь: обработка, кодирование и декодирование для хранения и пересылки.
- Кодирование голоса, звука и изображений для сжатия.
- Активное шумоподавление: наушники, глушители в автомобилях
- Обработка изображений, компьютерное зрение
- Компьютерная графика
- Промышленное применение: анализ вибрации, химический анализ
- Biomed: МРТ, сканирование кошек, визуализация, анализы, ЭКГ, ЭМГ и т. Д.
- Радар, Эхолот
- Сейсмология.
Определение сигналов
Что такое сигнал?
Сигнал — это способ передачи информации. Жесты, семафоры, изображения, звук — все это может быть сигналами.
Технически — функция времени, пространства или другой переменной наблюдения, которая передает информацию
Распишем 3 форм сигналов:- Непрерывный / аналоговый сигнал
- Сигнал дискретного времени
- Цифровой сигнал
Непрерывный (CT) / аналоговый сигнал
конечная , действительная , гладкая функция $ s (t) $ переменной t , которая обычно представляет время.И s , и t в $ s (t) $ являются непрерывными
Почему с действительной стоимостью ?
Обычно явления реального мира имеют реальную ценность.
Почему конечный ?
Реальные сигналы обычно имеют ограниченную энергию просто потому, что нам не доступен бесконечный источник энергии.
В качестве альтернативы, особенно когда они характеризуют долговременные явления (например, солнечное излучение), они будут ограничены по мощности.
Реальные сигналы также будут ограничены по амплитуде — их значения ни при каких условиях не будут бесконечными.
Чтобы утверждать, что сигнал «конечен», нам нужна некоторая характеристика его «размера». Утверждать, что сигнал конечен, значит утверждать, что размер сигнала ограничен — он никогда не стремится к бесконечности.2 (\ тау), д \ тау. $
Почему гладкий ?
Реальные сигналы никогда не меняются резко / мгновенно. Чтобы быть более техническим, у них конечная пропускная способность .Обратите внимание, что хотя мы сделали предположения о сигналах (конечность, реальные, гладкие), при фактическом анализе и разработке методов обработки сигналов эти соображения обычно игнорируются.
Дискретный сигнал (DT)
Сигнал с дискретным временем — это ограниченная последовательность с непрерывными значениями $ s [n] $. С другой стороны, его можно рассматривать как непрерывную функцию от дискретного индекса $ n $. 2 [n].$
Гладкость неприменима.
Цифровой сигнал
Мы будем работать с цифровыми сигналами, но будем развивать теорию в основном вокруг дискретных сигналов .
Цифровые компьютеры работают с цифровыми сигналами , а не с сигналами дискретного времени.Цифровой сигнал представляет собой последовательность $ s [n] $, где index значения $ s [n] $ не только конечны, но могут принимать только конечный набор значений. Например, в цифровом сигнале, где отдельные числа $ s [n] $ хранятся с использованием 16-битных целых чисел, $ s [n] $ может принимать одно из 2 16 значений.
В числовом ряду $ s [n] $ значения s могут принимать только фиксированный набор значений.
Цифровые сигналы — это сигналы с дискретным временем, полученные после «оцифровки». Цифровые сигналы также обычно получают путем измерения от явления реального мира. Однако, в отличие от принятой нормы для аналоговых сигналов, цифровые сигналы могут принимать комплексные значения.
Выше представлены некоторые критерии для реальных сигналов. Теоретические сигналы не ограничены
реальный — это часто нарушается; работаем с комплексными числами
конечное / ограниченное
энергия — ВСЕГДА нарушается. Сигналы, которые имеют бесконечную временную протяженность, , то есть , которые простираются от $ — \ infty $ до $ \ infty $, могут иметь бесконечную энергию.
мощность — почти никогда: почти все сигналы, с которыми мы столкнемся, имеют ограниченную мощность
гладкость — это часто нарушается многими из рассматриваемых нами сигналов непрерывного времени.
Примеры «стандартных» сигналов
Мы перечисляем некоторые основные типы сигналов, которые часто встречаются в DSP. Мы перечисляем их версии для непрерывного и дискретного времени. Обратите внимание, что аналоговые версии с непрерывным временем некоторых из этих сигналов являются искусственными конструкциями — они нарушают некоторые из условий, которые мы указано выше для сигналов реального мира и фактически не может быть реализовано.
Типы сигналов
Мы можем классифицировать сигналы по их свойствам, и все это повлияет на наш анализ этих сигналов позже.Периодические сигналы
Сигнал является периодическим, если он повторяется ровно через некоторый промежуток времени. Однако значение периодичности различается для сигналов с непрерывным и дискретным временем.Мы рассмотрим каждый из них по очереди.Сигналы непрерывного времени Таким образом, в непрерывном времени сигнал, если он называется периодическим, если существует какое-либо значение $ T $ такое, что \ [ s (t) = s (t + MT), ~~~~~ — \ infty \ leq M \ leq \ infty, ~~ \ text {integer} ~ M \] Наименьшее значение $ T $, для которого указанное выше соотношение удерживает период сигнала.
Дискретные сигналы времени
Определение периодичности для сигналов с дискретным временем аналогично определению для сигналов с непрерывным временем с одним ключевым отличием: период должен быть целым числом.Как мы увидим, это приводит к некоторым неинтуитивным выводам.
Дискретный сигнал времени $ x [n] $ называется периодическим, если существует положительное целое значение $ N $ такое, что \ [ x [n] = x [n + MN] \] для всех целых $ M $. Наименьшее значение $ N $, для которого справедливо указанное выше, является периодом сигнала.
Четные и нечетные сигналы
Симметический сигнал и даже — это сигнал, который зеркально отражается в момент времени $ t = 0 $.Сигнал считается, даже если он обладает следующим свойством: \ [ \ text {Непрерывное время:} ~ s (t) = s (-t) \\ \ text {Дискретное время:} ~ s [n] = s [-n] \]Сигнал является нечетным симметическим сигналом, если он имеет следующее свойство: \ [ \ text {Непрерывное время:} ~ s (t) = -s (-t) \\ \ text {Дискретное время:} ~ s [n] = -s [-n] \]
На рисунке ниже показаны примеры четных и нечетных симметричных сигналов.Например, косинус даже симметричен, поскольку $ \ cos (\ theta) = \ cos (- \ theta) $, что приводит к $ \ cos (\ omega t) = \ cos (\ omega (-t)) $ . С другой стороны, синус нечетно симметричен, поскольку $ \ sin (\ theta) = — \ sin (- \ theta) $, что приводит к $ \ sin (\ omega t) = — \ sin (\ omega (-t) ) $.
Разложение сигнала на четные и нечетные составляющие Любой сигнал $ x [n] $ может быть выражен как сумма четного и нечетного сигналов следующим образом. \ [ x [n] = x_ {четное} [n] + x_ {нечетное} [n] \] куда \ [ x_ {даже} [n] = 0.5 (х [п] + х [-n]) \\ x_ {odd} [n] = 0,5 (x [n] — x [-n]) \]
Управляющие сигналы
Сигналы могут быть составлены путем манипулирования и комбинирования других сигналов. Кратко рассмотрим эти манипуляции.
Масштабирование
Простое масштабирование сигнала вверх или вниз по коэффициенту усиления.
Непрерывное время: $ y (t) = a x (t) $Дискретное время: $ y [n] = a x [n] $
$ a $ может быть реальным / мнимым, положительным / отрицательным. Когда $ a отрицательно, сигнал переворачивается по оси y.
Разворот времени
Переворот сигнала слева направо.
Непрерывное время: $ y (t) = x (-t) $Дискретное время: $ y [n] = x [-n] $
Сдвиг во времени
Сигнал смещен вдоль оси индента на $ \ tau $ (или N для дискретного времени). Если $ \ tau $ положительно, сигнал задерживается, а если $ \ tau $ отрицательный сигнал продвигается.
Непрерывное время: $ y (t) = x (t- \ tau) $Дискретное время: $ y [n] = x [n — N] $
Расширение
Саму временную ось можно масштабировать на $ \ alpha $.
Непрерывное время: $ y (t) = x (\ alpha t) $Дискретное время: $ y [n] = x [/ alpha n] $
Расширение DT отличается от расширения CT, потому что $ x [n] $ определяется ТОЛЬКО для целого числа n, поэтому для существования $ y [n] = x [\ alpha n] $ «an» должно быть целым числом.
Однако $ x [\ alpha n] $ для $ a \ neq 1 $ проигрывает некоторым выборкам. Вы никогда не сможете полностью восстановить x [n] из него. Этот процесс часто называют дециминкацией .
Для сигналов DT $ y [n] = x [\ alpha n] $ для $ \ alpha интерполировать нули для неопределенных значений, если $ an $ не является целым числом.
Составные сигналы
Сигналы могут быть составлены путем манипулирования и комбинирования других сигналов. Есть несколько способов комбинирования сигналов, и мы рассматриваем следующие два:ПРИЛОЖЕНИЕ
Непрерывное время: $ y (t) = x_1 (t) + x_2 (t) $ Дискретное время: $ y [n] = x_1 [n] + x_2 [n] $
УМНОЖЕНИЕ
Непрерывное время: $ y (t) = x_1 (t) x_2 (t) $ Дискретное время: $ y [n] = y_1 [n] y_2 [n] $
$ x_1 [n] $ и $ x_2 [n] $ сами могут быть получены путем манипулирования другими сигналами.{\ alpha t} u (t) $ для $ \ alpha
На самом деле односторонние сигналы могут быть получены умножением на u [n] (или сдвинутые / обращенные во времени версии u [n] или u (t)).
Получение базовых сигналов друг от друга
Можно получить один сигнал из другого просто с помощью математических манипуляций.{\ infty} u [k] \ delta [n-k] $
На этом завершается введение в сигналы. В обзоре мы обсудили важность DSP, типы сигналов и их свойства, манипуляции с сигналами, и состав сигнала. Далее мы обсудим системы.
10.7: Дискретная обработка сигналов непрерывного времени
Структура процесса
С целью обработки сигналов непрерывного времени с использованием системы дискретного времени мы рассмотрим одну из наиболее распространенных структур технологий цифровой обработки сигналов.В качестве обзора принятого подхода исходный сигнал непрерывного времени \ (x \) дискретизируется в сигнал дискретного времени \ (x_s \) таким образом, что периоды спектра отсчетов \ (X_s \) будут как можно ближе к возможны по форме к спектру \ (X \). Затем применяется дискретный, линейный, инвариантный по времени фильтр \ (H_2 \), который изменяет форму спектра отсчетов \ (X_s \), но не может увеличить полосу пропускания \ (X_s \), чтобы произвести другой сигнал \ (y_s \ ). Он реконструируется с помощью подходящего фильтра восстановления для получения выходного сигнала с непрерывным временем \ (y \), таким образом эффективно реализуя некоторую систему с непрерывным временем \ (H_1 \).Этот процесс показан на рисунке \ (\ PageIndex {1} \), а спектры для конкретного случая показаны на рисунке \ (\ PageIndex {2} \).
Рисунок \ (\ PageIndex {1} \): показана блок-схема для обработки сигналов непрерывного времени с использованием систем дискретного времени.Необходимо дальнейшее обсуждение каждого из этих шагов, и мы начнем с обсуждения аналого-цифрового преобразователя, часто обозначаемого как ADC или A / D. Понятно, что для обработки сигнала с непрерывным временем с использованием методов дискретного времени мы должны дискретизировать сигнал в качестве начального шага.По сути, это цель ADC, хотя есть практические вопросы, которые будут обсуждены позже. АЦП принимает аналоговый сигнал с непрерывным временем в качестве входа и выдает цифровой сигнал с дискретным временем в качестве выхода, причем идеальный случай с бесконечной точностью соответствует дискретизации. Как указано в теореме выборки Найквиста-Шеннона, чтобы сохранить всю информацию об исходном сигнале, мы обычно желаем выборки выше частоты Найквиста \ (\ omega_s≥2B \), где исходный сигнал ограничен полосой до \ ((- B, Б) \).Когда невозможно гарантировать это условие, следует использовать фильтр сглаживания.
Дискретный временной фильтр — это место, где происходят преднамеренные модификации информации сигнала. Обычно это делается в цифровом компьютерном программном обеспечении после того, как сигнал был дискретизирован аппаратным АЦП, и до того, как он будет использован аппаратным ЦАП для создания выходного сигнала. Это позволяет описанной выше настройке быть довольно гибкой в фильтре, который она реализует. Если выборка выше частоты Найквиста, то.Любые модификации, которые дискретный фильтр вносит в эту форму, могут быть переданы непрерывному временному сигналу, предполагая идеальную реконструкцию. Следовательно, описанный процесс будет реализовывать непрерывный, линейный, инвариантный по времени фильтр. Это будет объяснено более математически в следующем разделе. Как обычно, есть, конечно, практические ограничения, о которых мы поговорим позже.
Наконец, мы обсудим цифро-аналоговый преобразователь, часто обозначаемый как DAC или D / A.Поскольку фильтры с непрерывным временем имеют входы с непрерывным временем и выходы с непрерывным временем, мы должны построить непрерывный сигнал времени из нашего отфильтрованного сигнала дискретного времени. Предполагая, что мы выбрали полосу, ограниченную с достаточно высокой частотой, в идеальном случае это будет сделано с использованием точной реконструкции по формуле интерполяции Уиттекера-Шеннона. Однако есть еще раз практические вопросы, которые мешают этому случиться, о чем мы поговорим позже.
Рисунок \ (\ PageIndex {2} \): Спектры показаны черным цветом на каждом этапе реализации непрерывного временного фильтра с использованием дискретного временного фильтра для конкретного сигнала.Частотные характеристики фильтра показаны синим цветом, и оба должны иметь максимальное значение 1, несмотря на вертикальную шкалу, которая предназначена только для спектров сигнала. Предполагаются идеальные АЦП и ЦАП.Дискретный временной фильтр
После некоторого начального обсуждения процесса, показанного на рисунке \ (\ PageIndex {1} \), завершена связь между непрерывным временем, линейным инвариантным фильтром \ (H_1 \) и дискретным временем, линейным инвариантным фильтром \ (H_2 \) можно изучить. Мы будем предполагать использование идеальных АЦП бесконечной точности и ЦАП, которые выполняют выборку и идеальную реконструкцию, соответственно, с использованием частоты дискретизации \ (\ omega_s = 2 \ pi / T_s≥2B \), где входной сигнал \ (x \) равен диапазон ограничен \ ((- B, B) \).{\ infty} H_ {1} \ left (\ frac {\ omega-2 \ pi k} {T_ {s}} \ right) (u (\ omega- (2 k-1) \ pi) -u (\ омега- (2 к + 1) \ пи)). \]
Проще говоря, \ (H_2 \) является \ (2 \ pi \) периодическим и \ (H_2 (\ omega) = H_1 (\ omega / T_s) \) для \ (\ omega \ in [- \ pi, \ Пи)\).
Для заданного непрерывного времени, линейно-инвариантного фильтра \ (H_1 \), приведенное выше уравнение решает проблему проектирования системы при условии, что мы знаем, как реализовать \ (H_2 \). Фильтр \ (H_2 \) должен быть выбран таким, чтобы он имел частотную характеристику, где каждый период имел ту же форму, что и частотная характеристика \ (H_1 \) на \ (\ left (- \ pi / T_ {s}, \ пи / T_ {s} \ right) \).Это проиллюстрировано частотными характеристиками, показанными на рисунке \ (\ PageIndex {2} \).
Мы могли бы также захотеть рассмотреть проблему системного анализа, в которой задан конкретный дискретный временной, линейный инвариантный фильтр \ (H_2 \), и мы хотим описать фильтр \ (H_1 \). Таких фильтров много, но мы можем описать их частотные характеристики на \ (\ left (- \ pi / T_ {s}, \ pi / T_ {s} \ right) \), используя приведенное выше уравнение. Выделение одного периода \ (H_2 (\ omega) \) приводит к выводу, что \ (H_ {1} (\ omega) = H_ {2} \ left (\ omega T_ {s} \ right) \) для \ (\ омега \ in \ left (- \ pi / T_ {s}, \ pi / T_ {s} \ right) \).Поскольку предполагалось, что \ (x \) ограничен полосой до \ (\ left (- \ pi / T_ {s}, \ pi / T_ {s} \ right) \), значение частотной характеристики в другом месте не имеет значения.
Дискретный и непрерывный сигнал — обмен стеком обработки сигналов
Непрерывный временной сигнал может быть оценен произвольно в любое время, по крайней мере теоретически, и может принимать значения в произвольных точках между любыми точками оценки. Преобразование Фурье, хотя и не всегда четко определено, может принимать значения на частотах от $ — \ infty $ до $ \ infty $, и это значение может быть нулевым, а сигнал в непрерывном времени также принимает значения в бесконечном интервале и те значения также могут быть нулевыми.
Дискретный сигнал времени принимает значения только в дискретных временных интервалах. Имеет смысл рассматривать значения, промежуточные во времени, промежуточные по отношению к этим выборкам, если, например, дискретный сигнал времени был выбран из непрерывного сигнала, или если у вас есть причина (обоснование). Как правило, промежуточные значения для выборок не определены. Вы можете учитывать цену акций или свиных брюк в дни, когда нет сделок. Никто не покупает и не продает. Цена не является последней торгуемой ценой и не равна нулю.У него есть преобразование Фурье, вычисляемое как бесконечное суммирование, а частота однозначно (непрерывно определена) ограничена $ — \ pi $ до $ \ pi $.
Таким образом, есть только подмножество дискретных сигналов времени, которые мы можем осмысленно сравнивать с их преобразованиями Фурье, и это сигналы, которые являются дискретными с помощью Найквиста. Ограничение диапазона и периодическая выборка изменяют исходный непрерывный временной сигнал, который изменяет частотный спектр, что почти отвечает на ваш вопрос.
Вопрос о том, имеет ли что-то значение в промежуточных точках между выборками как по времени, так и по частоте, является более тонким.
У меня может быть периодическая дискретная временная последовательность, и частоты в преобразовании Фурье также являются дискретными по частоте, но являются ли промежуточные значения по частоте равными нулю?
Самым популярным учебником по DSP является Оппенгейм и Шефер, а в самом последнем издании есть 3 интерпретации DFT, которые я интерпретирую как «да», «нет» и «возможно».
Я также могу интерполировать цены на свинину, но имеет ли это смысл?
Я думаю, ответ заключается в том, как вы хотите что-то изобразить.
Если вы хотите описать дискретный временной сигнал в непрерывной временной области, подходит последовательность дельта-функций Дирака, где промежуточные значения равны нулю. В других контекстах это может быть бессмысленным.
Еще один достойный внимания пример — реализация процесса Пуассона. У вас есть набор «времен прибытия», который вы можете сохранить на компьютере, ограниченный объемом памяти и числовой точностью, доступной на машине. Это список чисел, и промежуточные значения означают отсутствие «прибытий» в это промежуточное время.Пуассоновский процесс — это непрерывное время. Обычно анализ Фурье пуассоновского процесса не проводят. В компьютерном представлении есть некоторая дискретизация, поэтому можно придраться к тому, что оно не является строго непрерывным, но это практическое представление непрерывного сигнала. Это также пример непрерывного сигнала, для которого выборка Найквиста не имеет значения.
Понятия, связанные с сигналами
Сигналы являются функциями одного или нескольких независимые переменные и обычно содержат информацию о поведение или характер какого-либо явления.Системы обычно реагируют на определенные сигналы, производя другие сигналы. Представление сигнал в виде графика зависимости амплитуды от времени составляет форму волны . Образец вариаций, содержащихся в формах сигналов, дает нам информация о сигнале; например, человеческий голосовой механизм воспроизводит речь, создавая колебания акустического давления.
Детерминированные сигналы : сигнал детерминированный, если он точно предсказуем на период времени интерес.Детерминированные сигналы можно описать математическими моделями. Синусоидальный сигнал описывается следующим образом:
В (t) = A * sin (w * т),
, где V (t) — сигнал во времени
A (= амплитуда) и w
— параметры модели (2pf = w).
f — частота синусоидальной волны.
л
— период синусоидальной волны, обратный частоте (1 / f)
Итак: V (t) = A sin (2pft)
|
|
Стохастические или случайные сигналы : a сигнал, значение которого связано с некоторым элементом случайности, поэтому его нельзя точно предсказать.Следовательно, статистические свойства и вероятности должны использоваться для описания стохастических сигналы. На практике биологические сигналы часто имеют как детерминированные и стохастические компоненты.
Статистика амплитуды сигнала
Ряд статистических данных может использоваться как мера местоположения или
«центр» случайного сигнала:
- среднее значение — средняя амплитуда сигнала во времени
- медиана — значение, при котором половина наблюдений в выборке значения меньше медианы, а половина имеют значения больше, чем медиана.Медиана часто используется как мера «центра» сигнал, потому что он менее чувствителен к выбросам.
- режим является наиболее часто встречающимся значением сигнала
- максимальная и минимальная амплитуда максимальное и минимальное значение сигнала за заданное время интервал
- диапазон: диапазон или размах амплитуды — это разница между минимальное и максимальное значения сигнала.
Сигналы непрерывного времени в сравнении с
сигналы дискретного времени
Сигналы являются непрерывными сигналами времени, когда независимая переменная
непрерывно, поэтому сигналы определены для континуума значений
независимой переменной X (t). аналог
signal — это непрерывный сигнал времени. Сигналы дискретного времени только
определяется в дискретное время; независимая переменная принимает только
дискретный набор значений X (n).A цифровой
signal — это сигнал дискретного времени.
Дискретный сигнал времени может представлять собой явление, для которого
независимая переменная по своей сути дискретна (например, количество калорий
в сутки на диете). С другой стороны, дискретный сигнал может представлять
последовательные образцы основного явления, для которого независимые
переменная непрерывна (например, визуальное изображение, полученное цифровым
камера состоит из отдельных пикселей, которые могут принимать разные цвета).
Измерение частоты сигнала с помощью
спектральный анализ
Существуют количественные методы измерения частоты и амплитуды
форма волны.
