Что такое Arduino и для чего она нужна. Как использовать Arduino для создания электронных устройств. Какие проекты можно реализовать с помощью Arduino. Почему Arduino популярна среди разработчиков и любителей.
Что такое Arduino и зачем она нужна
Arduino — это универсальная аппаратная вычислительная платформа, представляющая собой печатную плату с микроконтроллером и средой разработки для написания программного обеспечения. По сути, Arduino — это компактный программируемый контроллер, который можно использовать для создания различных электронных устройств и проектов.
Основные особенности Arduino:
- Простота использования и программирования
- Открытая архитектура и исходный код
- Большое сообщество пользователей и разработчиков
- Широкий выбор совместимых модулей расширения
- Низкая стоимость базовых плат
Благодаря этим качествам Arduino стала очень популярной платформой для обучения электронике, разработки прототипов устройств и создания любительских проектов.
Области применения Arduino
Arduino может использоваться для реализации самых разнообразных проектов — от простых электронных поделок до сложных роботизированных систем. Вот некоторые популярные области применения Arduino:
- Умный дом и автоматизация
- Робототехника
- Интернет вещей
- Системы сбора данных и мониторинга
- Управление электроникой и механизмами
- Обучение программированию и схемотехнике
Рассмотрим подробнее некоторые типичные проекты на Arduino.
Примеры проектов на Arduino
Умный дом
Arduino отлично подходит для реализации элементов умного дома. С ее помощью можно создать:
- Системы управления освещением
- Автоматизацию штор и жалюзи
- Контроль климата (температура, влажность)
- Управление бытовыми приборами
- Системы безопасности и видеонаблюдения
Робототехника
Arduino — популярная платформа для создания роботов. С ее помощью можно разработать:
- Мобильных роботов на колесах или гусеницах
- Манипуляторы и роборуки
- Шагающих роботов
- Летающих дронов
- Подводных роботов
Системы мониторинга
Arduino позволяет создавать различные системы сбора данных и мониторинга параметров, например:
- Метеостанции
- Системы контроля окружающей среды
- Мониторинг энергопотребления
- Отслеживание местоположения объектов
Преимущества Arduino для разработки
Чем же Arduino так привлекает разработчиков и любителей электроники? Вот ключевые преимущества этой платформы:
Простота освоения
Arduino имеет низкий порог вхождения и проста в освоении даже для новичков. Язык программирования основан на C++ и интуитивно понятен. Среда разработки содержит множество готовых примеров.
Открытость и доступность
Arduino — это открытая платформа с доступными схемами и исходным кодом. Можно свободно модифицировать и дорабатывать как аппаратную часть, так и программное обеспечение.
Обширная экосистема
Вокруг Arduino сформировалась большая экосистема совместимых компонентов, модулей расширения, библиотек кода. Это позволяет быстро собирать сложные проекты из готовых блоков.
Кросс-платформенность
Среда разработки Arduino работает на Windows, MacOS и Linux. Сами платы совместимы с разными операционными системами. Это обеспечивает гибкость при разработке.

Аппаратная часть Arduino
Рассмотрим базовые компоненты аппаратной части платформы Arduino:
Микроконтроллер
Сердце Arduino — микроконтроллер, чаще всего семейства ATmega от Atmel. Он выполняет программу и управляет всей периферией.
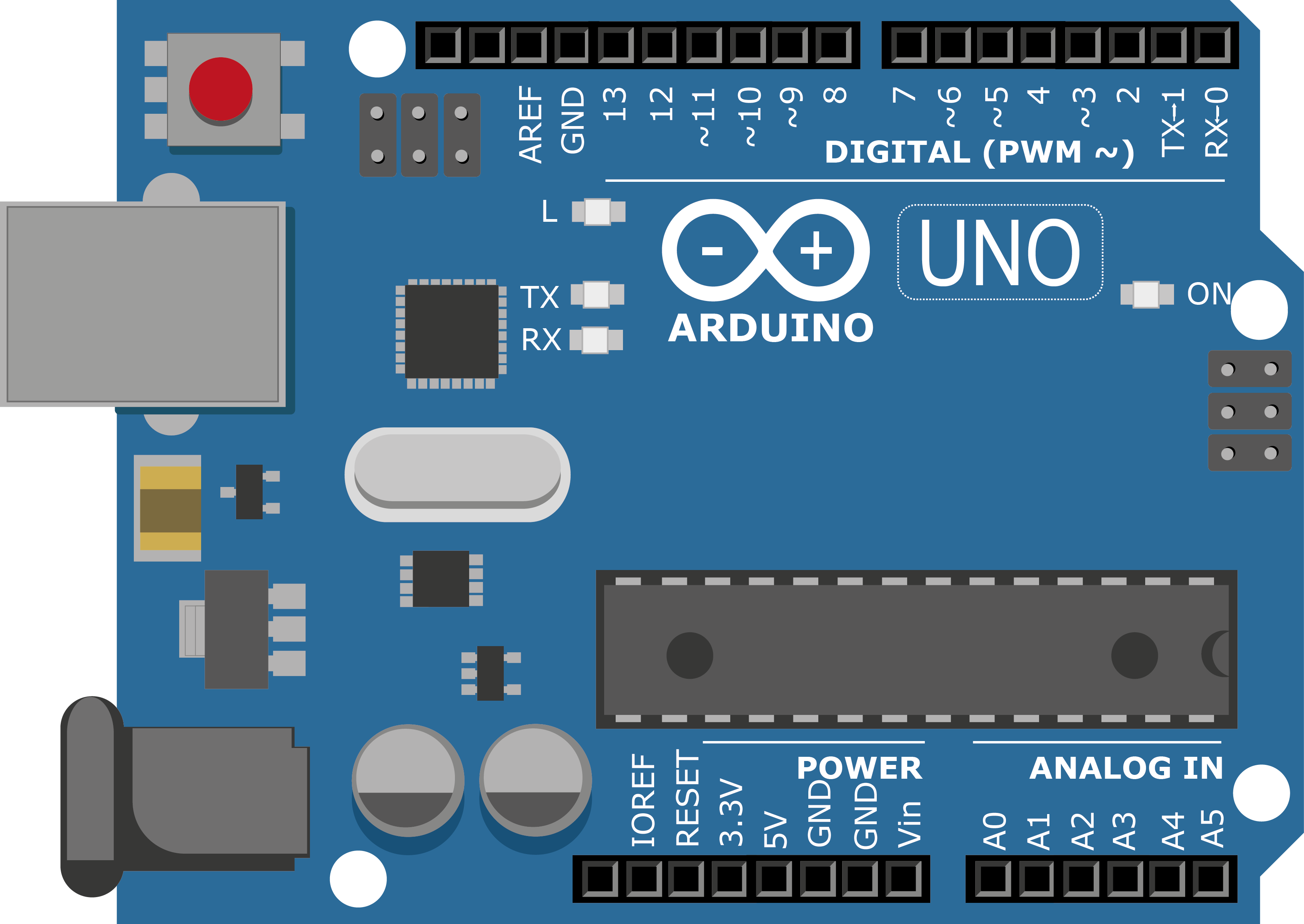
Порты ввода-вывода
Arduino имеет цифровые и аналоговые порты для подключения различных датчиков, кнопок, светодиодов и других компонентов.Питание
Платы Arduino могут питаться от USB, внешнего источника или батарей. Встроенный стабилизатор обеспечивает необходимое напряжение для работы.
Коммуникационные интерфейсы
Базовые платы имеют USB для связи с компьютером. Расширенные версии могут включать Ethernet, Wi-Fi, Bluetooth и другие интерфейсы.
Программирование Arduino
Для программирования Arduino используется специальная среда разработки Arduino IDE. Она позволяет писать код, компилировать его и загружать на плату. Основные особенности программирования Arduino:
- Язык программирования основан на C++
- Программы называются скетчами (sketch)
- Имеется большая библиотека стандартных функций
- Поддерживаются сторонние библиотеки
- Простая структура программы с функциями setup() и loop()
Такой подход позволяет быстро создавать работающие прототипы даже начинающим разработчикам.
Модули расширения для Arduino
Функциональность Arduino можно значительно расширить с помощью дополнительных модулей — шилдов (shields). Это платы расширения, которые устанавливаются сверху на Arduino и добавляют новые возможности. Вот примеры популярных шилдов:
- Ethernet Shield — для подключения к интернету
- Motor Shield — для управления двигателями
- GPS Shield — для работы с GPS
- LCD Shield — для подключения дисплея
- Relay Shield — для управления мощной нагрузкой
Использование готовых модулей позволяет быстро добавлять нужный функционал без пайки и сложных подключений.
Заключение
Arduino — это мощная и гибкая платформа для разработки электронных устройств. Она позволяет реализовывать самые разные проекты — от простых светодиодных мигалок до сложных роботов и систем автоматики. Благодаря простоте освоения, открытости и обширной экосистеме Arduino стала де-факто стандартом для обучения электронике и прототипирования. Эта платформа открывает широкие возможности для творчества и позволяет воплощать в жизнь самые смелые идеи.
Аппаратная часть платформы Arduino | Аппаратная платформа Arduino
Существует несколько версий платформ Arduino. Последняя версия Leonardo базируется на микроконтроллере ATmega32u4. Uno, как и предыдущая версия Duemilanove построены на микроконтроллере Atmel ATmega328 (техническое описание). Старые версии платформы Diecimila и первая рабочая Duemilanoves были разработаны на основе Atmel ATmega168 (техническое описание), более ранние версии использовали ATmega8 (техническое описание). Arduino Mega2560, в свою очередь, построена на микроконтроллере ATmega2560 (техническое описание).
Примечание: На всю документацию Arduino распространяется лицензия ShareAlike 3.0 Creative Commons Attribution. Обратитесь к странице «Вы хотите собрать Arduino?» (англ) за более подробной информацией по разработке собственной платформы.
Версии платформы Arduino:
Ниже представлены основные версии плат Arduino:
- Due — новая плата на базе ARM микропроцессора 32bit Cortex-M3 ARM SAM3U4E.
- Leonardo — последняя версия платформы Arduno на ATmega32u4 микроконтроллере . Отличается разъемом microUSB, по размерам совпадает с UNO.
- Yun (описание на англ.) — новая плата, с встроенной поддержкой WiFi на базе ATmega32u4 and the Atheros AR9331
- Micro — новое компактное решение на базе ATmega32u4.
- Uno — самая популяраня версия базовой платформы Arduino USB. Uno имеет стандартный порт USB. Arduino Uno во многом схожа с Duemilanove, но имеет новый чип ATMega8U2 для последовательного подключения по USB и новую, более удобную маркировку вход/выходов. Платформа может быть дополнена платами расширения, например, пользовательскими платами с различными функциями.
- Arduino Ethernet — контроллер со встроенной поддержкой работы по сети и с опциональной возможностью питания по сети с помощью модуля POE (Power over Ethernet).
- Duemilanove — является предпоследней версией базовой платформы Arduino USB. Подключение Duemilanove производится стандартным кабелем USB. После подключения она готова к использованию. Платформа может быть дополнена платами расширения, например, пользовательскими платами с различными функциями.
- Diecimila — предыдущая версия базовой платформы Arduino USB.
- Nano — это компактная платформа, используемая как макет. Nano подключается к компьютеру при помощи кабеля USB Mini-B.
-
- Mega2560 – новая версия платы серии Mega. Построена на базе Atmega2560 и с использованием чипа ATMega8U2 для последовательного соединения по USB порту.
- Mega – предыдущая версия серии Mega на базе Atmega1280.
- Arduino BT платформа с модулем Bluetooth для беспроводной связи и программирования. Совместима с платами расширения Arduino.
- LilyPad– платформа, пурпурного цвета, разработанная для переноски, может зашиваться в ткань.
- Fio – платформа разработана для беспроводных применений. Fio содержит разъем для радио XBee, разъем для батареи LiPo и встроенную схему подзарядки.
- Mini – самая маленькая платформа Arduino. Прекрасно работает как макетная модель, или, в проектах, где пространство является критическим параметром. Платформа подключается к компьютеру при помощи адаптера Mini USB.
- Адаптер Mini USB – плата, конвертирующая подключение USB в линии 5 В, GND, TX и RX для соединения с платформой Arduino Mini или другими микроконтроллерами.
- Pro – платформа, разработанная для опытных пользователей, может являться частью большего проекта. Она дешевле, чем Diecimila и может питаться от аккумуляторной батареи, но в тоже время требует дополнительной сборки и компонентов.
- Pro Mini – как и платформа Pro разработана для опытных пользователей, которым требуется низкая цена, меньшие размеры и дополнительная функциональность.
- Serial – базовая платформа с интерфейсом RS232 для связи и программирования. Плата легко собирается даже начинающими пользователями. (включает схемы и файлы CAD)
- Serial Single Sided – платформа разработана для ручной сборки. Она обладает чуть большим размером, чем Diecimila, но совместима с платами расширения Arduino.
- USB Serial Light Адаптер — адаптер, позволяющий подключать платы Arduino к компьютеру для обмена данными и заливки скетчей. Удобен для программирования таких плат, как Arduino Mini, Arduino Ethernet и других, не имеющих своего разъема USB
Платы расширения
Платы расширения, устанавливаемыми на платформы, являются платы, расширяющие функциональность Arduino для управления различными устройствами, получения данных и т.д.
- Плата расширения WiFi используется для соединения с беспроводными сетями стандарта 802.11 b/g.
- Плата расширения Xbee Shield обеспечивает при помощи модуля Maxstream Xbee Zigbee беспроводную связь нескольким устройствам Arduino в радиусе до 35 метров (в помещении) и до 90 метров (вне помещения).
- Плата расширения Motor Shield обеспечивает управление двигателями постоянного тока и чтение датчиков положения.
- Плата расширения Ethernet Shield обеспечивает подключение к интернету.
Рекомендуемые аппаратные средства других разработчиков
Испытанные и понравившиеся устройства других разработчиков, совместимые с программой Arduino:
Платформа Boarduino от Adafruit Industries. Предназначена для использования с кабелем FTDI USB-to-TTL-Serial или другим адаптером USB-to-serial. Доступна в виде пустой печатной платы или в комплекте.
Другие сопутствующие устройства
Проверьте список сопутствующего оборудования, составленный пользователями на площадке разработок.
Arduino Due (дополнено) | Аппаратная платформа Arduino
| Arduino Due, вид спереди | Arduino Due, вид сзади |
Общие сведения
Arduino Due — плата микроконтроллера на базе процессора Atmel SAM3X8E ARM Cortex-M3 (описание). Это первая плата Arduino на основе 32-битного микроконтроллера с ARM ядром. На ней имеется 54 цифровых вход/выхода (из них 12 можно задействовать под выходы ШИМ), 12 аналоговых входов, 4 UARTа (аппаратных последовательных порта), a генератор тактовой частоты 84 МГц, связь по USB с поддержкой OTG, 2 ЦАП (цифро-аналоговых преобразователя), 2 TWI, разъем питания, разъем SPI, разъем JTAG, кнопка сброса и кнопка стирания.
Внимание! В отличие от других плат Arduino, Arduino Due работает от 3,3 В. Максимальное напряжение, которое выдерживают вход/выходы составляет 3,3 В. Подав более высокое напряжение, например, 5 В, на выводы Arduino Due, можно повредить плату.
Плата содержит все, что необходимо для поддержки микроконтроллера. Чтобы начать работу с ней, достаточно просто подключить её к компьютеру кабелем микро-USB, либо подать питание с AC/DC преобразователя или батарейки. Due совместим со всеми платами расширения Arduino, работающими от 3,3 В, и с цоколевкой Arduino 1.0.
Расположение выводов Due повторяет цоколевку Arduino 1.0:
- TWI: Выводы SDA и SCL расположены рядом с выводом AREF.
- Вывод IOREF, который позволяет с помощью правильной конфигурации адаптировать присоединенную плату расширения к напряжению, выдаваемому Arduino. Благодаря этому платы расширения могут быть совместимы и с 3,3-вольтовыми платами типа Due и с платами на базе AVR, работающими от 5 В.
- Неподключенные выводы, зарезервированные для использования в будущем.
Преимущества ядра ARM
На Due установлено 32-битное ARM ядро, превосходящее по производительности обычные 8-битные микроконтроллеры. Наиболее значимые отличия:
32-битное ядро, позволяющее выполнять операции с данными шириной 4 байта за 1 такт (более подробную информацию смотри на странице int type).
- частота процессора (CPU) 84 МГц.
- 96 КБ ОЗУ.
- 512 КБ флеш-памяти для хранения программ.
- контроллер DMA, который разгружает центральный процессор от выполнения интенсивных операций с памятью.
Схема, исходные данные и расположение выводов
Файлы EAGLE: arduino-Due-reference-design.zip
Схема: arduino-Due-schematic.pdf
Расположение выводов: SAM3X Pin Mapping page
Характеристики
|
Микроконтроллер |
AT91SAM3X8E |
|
Рабочее напряжение |
3,3 В |
|
Входное напряжение (рекомендуемое) |
7-12 В |
|
Входное напряжение (предельное) |
6-20 В |
|
Цифровые Входы/Выходы |
54 (на 12 из которых реализуется выход ШИМ) |
|
Аналоговые входы |
12 |
| Аналоговые выходы | 2 (ЦАП) |
|
Общий выходной постоянный ток на всех входах/выходах |
50 мА |
| Постоянный ток через вывод 3,3 В | 800 мА |
| Постоянный ток через вывод 5 В | 800 мА |
| Флеш-память | 512 КБ доступно всего для пользовательских приложений |
| ОЗУ | 96 КБ (два банка: 64 КБ и 32 КБ) |
| Тактовая частота | 84 МГц |
Питание
Питание Arduino Due может осуществляться через USB соединитель или с помощью внешнего источника питания. Выбор источника питания выполняется автоматически.
Внешним (не USB) источником питания может быть либо AC/DC преобразователь («wall wart» — адаптер в одном корпусе с вилкой), либо батарея. Адаптер подключается к разъему питания платы 2,1 мм штепсельной вилкой с центральным положительным контактом. Выводы батареи подключаются к контактам Gnd и Vin разъема POWER. Плата может функционировать при внешнем питании от 6 до 20 В. Но если напряжение питания опускается ниже 7 В, на выводе 5 В может оказаться меньше пяти вольт, и плата будет работать нестабильно. Если же подается напряжение более 12 В, может перегреться стабилизатор напряжения, что приведет к повреждению платы. Рекомендуемый диапазон напряжений – от 7 до 12 В.
Ниже перечислены выводы питания:
- VIN. Это входное напряжение для платы Arduino, когда она питается от внешнего источника питания (в противоположность 5 вольтам, поступающим через USB соединение или от иного регулируемого источника питания). Напряжение питания может подаваться на этот вывод, или сниматься с этого вывода в случае питания через разъем питания.
- 5V. Данный вывод служит выходом регулируемого напряжения 5 В со встроенного стабилизатора на плате. Сама плата может питаться через разъем питания постоянного тока (7-12 В), либо через USB соединитель (5 В), либо через вывод VIN на плате (7-12V). Питающее напряжение через выводы 5 В и 3,3 В подается в обход стабилизатора и может повредить вашу плату. Мы не советуем так делать.
- 3.3V. Питание 3,3 В, вырабатываемое встроенным стабилизатором. Максимальный выходной ток 800 мА. Стабилизатор также обеспечивает питание микроконтроллера SAM3X.
- GND. Земляные выводы.
- IOREF. Данный вывод платы Arduino обеспечивает опорное напряжение, при котором работает микроконтроллер. Верно сконфигурированная плата расширения может считать напряжение на выводе IOREF и выбрать соответствующий источник питания, или разрешить использование выходных преобразователей напряжения для работы с 5 В или 3,3 В.
Память
Флеш-память SAM3X составляет 512 КБ (2 блока по 256 КБ) для хранения программ. Загрузчик (бутлодер) записывается Atmel при производстве и хранится в специально отведенном для него ПЗУ. Доступный объем ОЗУ составляет 96 КБ в двух смежных банках – 64 КБ и 32 КБ. Вся доступная память (флеш-память, ОЗУ и ПЗУ) может адресоваться напрямую как плоское адресное пространство.
Существует возможность стереть флеш-память SAM3X с помощью встроенной кнопки стирания. При этом из микропроцессора удалится текущая загруженная программа. Для стирания нажмите и несколько секунд удерживайте кнопку стирания при включенном питании платы.
Входы и Выходы
-
Цифровые входы/выходы: выводы с 0 по 53
Каждый из 54 цифровых выводов Due может использоваться в качестве входа или выхода, с помощью функций pinMode(), digitalWrite() и digitalRead(). Выводы работают от 3,3 В. Каждый вывод может выдавать (как источник) ток 3 мА или 15 мА, в зависимости от вывода, или получать (как приемник) ток 6 мА или 9 мА, в засимости от вывода. На них также имеются внутренние нагрузочные резисторы (по умолчанию они отключены) номиналом 100 кОм. Кроме этого, некоторым выводам назначены специализированные функции: - Последовательная линия: 0 (RX) и 1 (TX)
- Последовательная линия 1: 19 (RX) и 18 (TX)
- Последовательная линия 2: 17 (RX) и 16 (TX)
-
Последовательная линия 3: 15 (RX) и 14 (TX)
Эти выводы используются для приема (RX) и передачи (TX) последовательных данных TTL (с уровнем 3,3 В). Выводы 0 и 1 соединены с соответствующими выводами последовательного контроллера ATmega16U2 USB-to-TTL. -
ШИМ: выводы с 2 по 13
На них реализуется 8-битный выход ШИМ с помощью функции analogWrite(). Разрешение ШИМ можно менять, используя функцию analogWriteResolution(). -
SPI: разъем SPI (разъем ICSP на других платах Arduino)
Данные выводы служат для связи по SPI с использованием библиотеки SPI. Сигналы SPI выведены на центральный 6-контактный разъем, который физически совместим с Uno, Leonardo и Mega2560. Разъем SPI можно использовать только для связи с другими устройствами SPI, но не для программирования SAM3X по технологии внутрисхемного последовательного программирования (ICSP). SPI на Due также имеет расширенные функции, доступные при использовании Расширенных методов SPI для Due. -
CAN: CANRX и CANTX
На этих выводах поддерживается протокол связи CAN, но пока его не поддерживают программные интерфейсы (API) Arduino. -
«L» LED: 13
Встроенный светодиод, подключенный к цифровому выводу 13. При высоком уровне сигнала на данном выводе, светодиод включается, при низком – выключается. Возможно также убавить яркость светодиода, поскольку вывод 13 одновременно является выходом ШИМ. - TWI 1: 20 (SDA) и 21 (SCL)
-
TWI 2: SDA1 и SCL1
На данных выводах с использованием библиотеки Wire поддерживается связь по TWI. -
Аналоговые входы: выводы с A0 по A11
Плата Arduino Due имеет 12 аналоговых входов, каждый из которых может обеспечить разрешение 12 бит (т.е. 4096 различных значений). По умолчанию установлено разрешение 10 бит для совместимости с другими платами Arduino. Разрешение АЦП можно менять при помощи функции analogReadResolution(). Аналоговые ходы Due производят измерения от уровня земли до максимального значения 3,3 В. Приложение к этим выводам напряжения свыше 3,3 В вызовет повреждение кристалла SAM3X. Функция analogReference() на Due игнорируется.
Вывод AREF подключен к аналоговому выводу опорного напряжения SAM3X через резисторный мост. Для активации вывода AREF необходимо отпаять с печатной платы резистор BR1. -
DAC1 и DAC2
На выводах ЦАП DAC1 и DAC2 предоставляются достоверные аналоговые выходы с 12-битным разрешением (4096 уровней) при помощи функции analogWrite(). Данные выводы можно использовать для создания аудиовыхода, используя при этом библиотеку Audio.
Другие выводы:
-
AREF
Опорное напряжение для аналоговых входов. Используется с функцией analogReference(). - Reset
- По низкому уровню на этой линии происходит сброс микроконтроллера. Типичное применение вывода Reset – добавление кнопки сброса на плату расширения, которая перекрывает эту кнопку на микроконтроллере.
Связь
В Arduino Due есть ряд средств для взаимодействия с компьютером, платами Arduino и другими микроконтроллерами, а также различными устройствами, такими как телефоны, планшеты, фотокамеры и т.п. SAM3X имеет один аппаратный UART и три аппаратных USARTа для последовательной связи TTL-уровня (3,3 В).
Порт программирования соединен с ATmega16U2, предоставляющей виртуальный COM порт для программ на подключенном компьютере. (Для определения этого устройства компьютеру с ОС Windows потребуется файл .inf, на машинах же с OSX и Linux плата автоматически будет распознана как COM порт). Чип 16U2 также соединен с аппаратным UARTом SAM3X. Последовательная шина на выводах RX0 и TX0 предоставляет преобразование Serial-to-USB для программирования платы через микроконтроллер ATmega16U2. В программное обеспечение Arduino входит монитор последовательной шины, который дает плате возможность отправлять и принимать простые текстовые сообщения. Светодиоды RX и TX на плате будут мигать, когда идет передача данных через кристалл ATmega16U2 и через USB подключение к компьютеру (но не во время последовательного обмена по выводам 0 и 1).
Собственный USB порт (Native USB port) подключен к SAM3X. Это позволяет осуществлять последовательную связь (CDC) посредством USB. Таким образом обеспечивается подключение к монитору последовательной шины, или другим приложениям на вашем компьютере. Также это дает Due возможность эмулировать для присоединенного компьютера USB мышь или клавиатуру. Для использования этих возможностей смотрите справочные страницы Библиотека мыши и клавиатуры.
Собственный USB порт может также работать как USB хост для подключенных периферийных устройств: мыши, клавиатуры и смартфотонов. Чтобы использовать эти свойства, обратитесь к справочным страницам USB хост.
Контроллер SAM3X поддерживает, кроме того, связь по интерфейсам TWI и SPI. Программное обеспечение Arduino включает в себя библиотеку Wire для облегчения работы с шиной TWI; смотрите более детальное описание в документации. Для связи через SPI воспользуйтесь библиотекой SPI.
Программирование
Arduino Due можно запрограммировать с помощью программных средств Arduino (скачать). Более детальная информация содержится в справочнике.
Загрузка программ для SAM3X отличается от таковой для микроконтроллеров AVR, находящихся на других платах Arduino, поскольку необходимо стереть флеш-память перед тем как перепрограммировать её. Загрузка в кристалл управляется из ПЗУ контроллера SAM3X и запускается, только когда флеш-память кристалла пуста.
Плату можно программировать через оба USB порта, хотя рекомендуется использовать порт программирования, в связи с тем, что он поддерживает стирание кристалла:
- Порт программирования: Для использования этого порта выберите в Arduino IDE в качестве вашей платы «Arduino Due (Programming Port)». Подключите порт программирования платы Due (ближайший к разъему питания постоянного тока) к вашему компьютеру. Порт программирования использует микросхему 16U2 в качестве преобразователя USB-to-serial, соединенный с первым UARTом контроллера SAM3X (RX0 и TX0). Два вывода 16U2 подключены к выводам Reset и Erase SAM3X. Открытие и закрытие порта программирования, подключенного на скорости передачи 1200 бит в секунду, запускает процедуру «аппаратного стирания» чипа SAM3X, активирование выводов Erase и Reset на SAM3X перед установлением связи с UART. Это рекомендуемый порт для программирования Due. Аппаратное стирание более надежно, чем «программное стирание», которое происходит на собственном USB порте, и будет работать даже в случае повреждения главного микропроцессора.
- Собственный порт: Чтобы использовать этот порт, выберите в Arduino IDE тип вашей платы «Arduino Due (Native USB Port)». Собственный USB порт подсоединен напрямую к SAM3X. Подключите собственный USB порт Arduino Due (ближний к кнопке Reset) к вашему компьютеру. Открытие и закрытие собственного порта при скорости передачи 1200 бит в секунду запускает процедуру «программного стирания»: флеш-память стирается и плата перезапускается с помощью загрузчика. Если главный микроконтроллер по какой-либо причине поврежден, то, вероятно, программное стирание не будет работать, так как эта процедура на SAM3X происходит полностью программно. Открытие и закрытие собственного порта на других скоростях передачи не вызовет сброса SAM3X.
В отличие от других плат Arduino, использующих для загрузки avrdude, Due полагается на bossac.
Исходный код программы для ATmega16U2 доступен в архиве Arduino. К разъему ISP можно подключать внешний программатор (перезаписывая загрузчик DFU). Более подробную информацию можно найти в инструкциях для помощи пользователям.
Токовая защита разъема USB
На Arduino Due имеется самовосстанавливающийся предохранитель, назначение которого – защитить USB порты вашего компьютера от короткого замыкания и перегрузки по току. Несмотря на то, что в большинстве компьютеров есть встроенная защита по току, этот предохранитель дает дополнительную защиту. При токе через USB порт более 500 мА связь автоматически обрывается предохранителем до прекращения перегрузки или короткого замыкания.
Физические характеристики и совместимость с платами расширения
Максимальная длина печатной платы Arduino Due равна 4 дюйма, а ширина – 2,1 дюйма, без учета USB соединителей и разъема питания, которые выступают за приведенные габаритные размеры. Три отверстия под винты позволяют закрепить плату на поверхности или в корпусе. Обратите внимание, что расстояние между цифровыми выводами 7 и 8 составляет 160 мил (0.16″, 4,064 мм), не кратно промежуткам в 100 мил (2,54 мм) между остальными выводами.
Arduino Due сделан совместимым с большинством плат расширения, разработанных для Uno, Diecimila или Duemilanove. Цифровые выводы с 0 по 13 (и соседние выводы AREF и GND), аналоговые входы с 0 по 5, разъем питания, разъем «ICSP» (SPI) расположены одинаково на всех платах. Более того, основной UART (последовательный порт) находится на тех же выводах (0 и 1).
Пожалуйста, обратите внимание, что шина I2C расположена в Arduino Due на других выводах (20 и 21), не так как в Duemilanove / Diecimila (аналоговые входы 4 и 5).
Ардуино что это и зачем? / Arduino / RoboCraft. Роботы? Это просто!
Как мы узнали — это “аппаратная вычислительная платформа”, а по-русски — контроллер.А что такое контроллер?
Для тех кто немного в курсе: не путать с микроконтроллером — МК это atmega, PIC и прочие “микросхемы” – однокристальные микро-ЭВМ,а контроллер это плата такая, на которую этот самый МК запаян.
Для тех кто совсем не в курсе: контроллер это такое электронное устройство которое что- нибудь контролирует — то есть реагирует на изменения одних параметров изменением других. Ну вот например кондиционер на стене видишь? (я тоже не вижу, но у кого-то он наверняка есть) так вот там тоже стоит умная плата-контроллер включающая/выключающая подогрев/охлаждение/осушение/увлажнение воздуха когда нужно.
Кондиционер, mp3 плеер, велокомпьютер, сигнализация, мобильник, навигатор — всё это (грубо говоря) специализированные контроллеры. А вот комп настольный это контроллер универсальный, да ещё и расширяемый, и с его помощью всё вышеперечисленное можно реализовать. Нужны будут только соответствующие платы расширения и софт.
Ардуино
Так вот ардуино тоже универсальный контроллер, который можно заточить под какую-нибудь задачу и превратить в законченное электронное устройство произвольного назначения, от часов с будильником до робота. Или просто играться — собирая разбирая всякие приблуды=)
Радиоконструктор в общем.
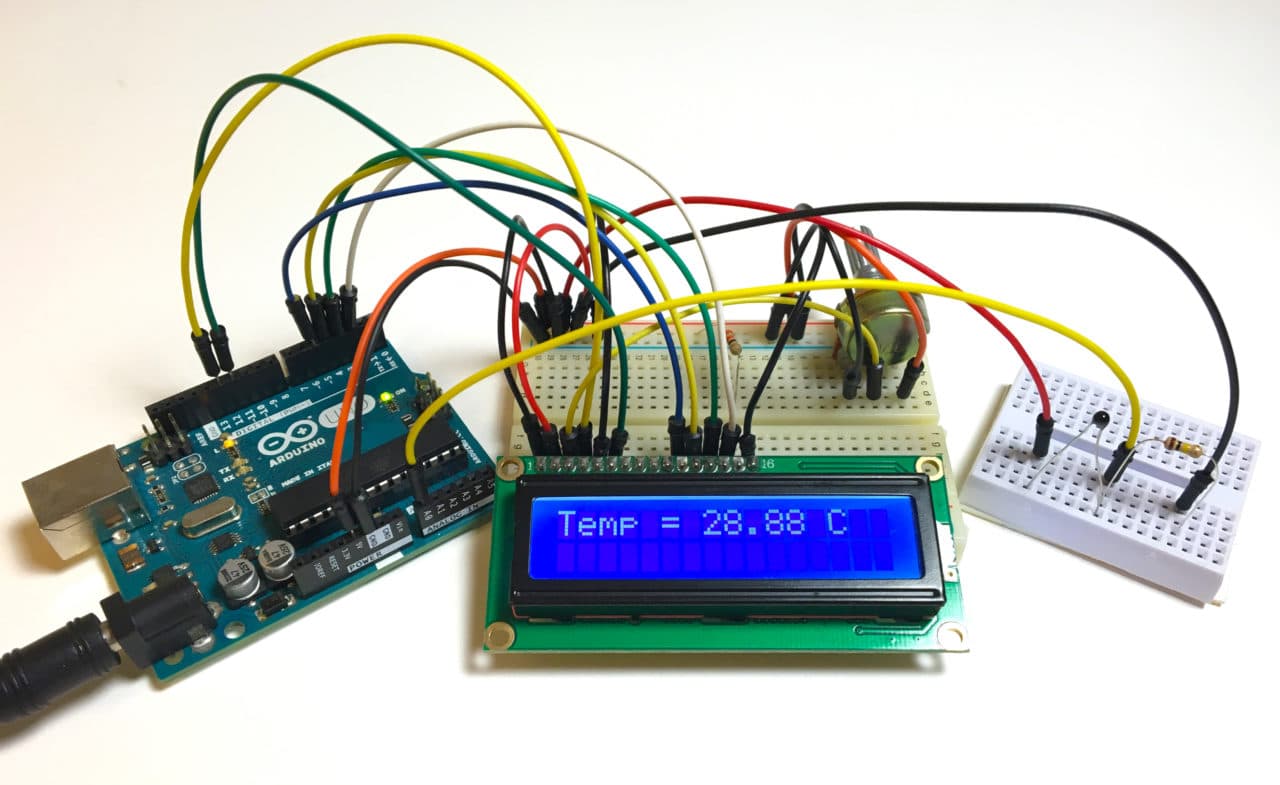
К самой плате можно подключать различную периферию – кнопки, некоторые виды датчиков (температуры, давления, освещённости, ускорения и т.п.), светодиоды, жидкокристаллические индикаторы (цифро-буквенные, а не LCD-монитор конечно =) написать программу и заставить взаимодействовать всё это как угодно. Масса применений кстати.
Системы сбора данных (чёрный ящик для аквариума – пишет температуру раз в 5 минут)
Таймеры-Счётчики событий (сколько раз и во сколько кот подходил к пустой миске)
Сигнализации-Извещатели (кот превысил разрешенное количество подходов к миске, температура в аквариуме ниже 0, кто-то покинул туалет не выключив свет/не смыв/не опустив стульчак =)
В таком духе. Cкучновато конечно. Прям как древний пустой комп — ну клава, ну моник, ну часы, ну пасьянс какой-нибудь… А вот если воткнуть звуковушку, модем, мышь с джойстиком, да тв-тюнер с веб-камерой присобачить… уже больший полёт фантазии можно наблюдать.
Так же подключая к ардуино различные устройства – шилды(shields) добавляем различные функции — так можно управлять всякими двигателями, сервомашинками, сетевой нагрузкой наконец (свет, обогреватель, чайник и т.п.). Можно подключить GPS или GSM модуль и получать координаты со спутника или отправлять данные на свой телефон – координаты своей машины которую кореш взял покататься, или угнали не дай бог, или в командировке узнать что твой любимый кактус никто не поливает. Можно воткнуть Ethernet-модуль и выпустить свой девайс в интернет — пусть шлёт данные на твой сайт, или пусть пишет всё на SD-карту воткнутую в соответствующий шилд. Можно добавить каналы связи – ИК, радиоканал, а то и вообще Bluetooth, со всеми вытекающими.
Ещё примеры что в голову приходит:
Автокормушка для домашних животных
Контроллер аквариума
Дебаггер для машины (все температуры, давления, обороты твоего жигуля на красивом экранчике, расшифровка блинк-кодов)
Системы удалённой телеметрии
Велокомпьютер
Элементы умного дома (управление светом, шторами, вентиляцией, кондиционированием, отоплением, прочими электроприборами)
Элементы хобби-чпу
Простые промышленные контроллеры
Ну и конечно робототехника! (для этого сайта — основное направление развития =)
И всё это в произвольных комбинациях — ограничивает только фантазия и владение железом/софтом.
Почему ардуино? Да, есть ещё немало универсальных контроллеров и плат развития позволяющих осуществлять и более амбициозные проекты. Но! Ардуино имеет ряд преимуществ:
Не нужен программатор
Не нужны особо глубокие познания в программирования микроконтроллеров
Проект ардуино полностью открытый
Платформа набирает популярность — куча сайтов с библиотеками, схемами и проектами
Стандартизация расположения выводов — это делает её привлекательной для производителей – появляются всё новые шилды
Кроссплатформенная среда разработки
Вообще полазив по интернету возникает ощущение что ардуино становится стандартом для целого класса хоум-мейдеров=)
далее: ХоумМейд Arduino — как сделать Arduino своими руками
По теме
Почему Arduino побеждает и почему он здесь, чтобы остаться?
Arduino, термины, начало работы
КМБ для начинающих ардуинщиков
Состав стартера (точка входа для начинающих ардуинщиков)
Возможные ошибки при работе с Arduino
Купить Arduino или CraftDuino — можно в нашем Магазине.
Контроллер ЛАРТ. Ардуино с винтовыми клеммами
Описание
Контроллер LART LM-AN
Особенности контроллера
Контроллер Arduino nano — один из самых популярных контроллеров в линейке контроллеров Arduino.
Модуль LART LM-AN выполнен по схеме полностью повторяющей схему Arduino nano с единственным отличием. Пины процессора Atmega328 выведены на винтовые клеммы.
Применение контроллеров на основе Arduino nano
В первую очередь это отладочная плата при разработке различных проектов.
Игровые устройства
— Светодиодный куб;
— Музыкальная шкатулка;
Учебное оборудование
— конструкторы роботов;
— конструкторы по основам схемотехники и программирования;
Устройства автоматики
— таймеры;
— регуляторы температуры, оборотов электродвигателей;
— кодовые замки;
— программируемые реле;
Бытовая электроника:
— электронные часы;
— метеостанция;
Характеристики контроллера| Микроконтроллер | Atmel ATmega328 |
| Рабочее напряжение (логический уровень) | 5 В |
| Входное напряжение (рекомендуемое) | 7-12 В |
| Входное напряжение (предельное) | 6-20 В |
| Цифровые Входы/Выходы | 14 (6 из которых могут использоваться как выходы ШИМ) |
| Аналоговые входы | 8 |
| Постоянный ток через вход/выход | 40 mAh с одного вывода и 500 mAh со всех выводов |
| Флеш-память | 32 Кб (ATmega328) при этом 2 Кб используются для загрузчика |
| Тактовая частота | 16 МГц |
| ОЗУ | 2 Кб |
| EEPROM | 1 Кб |
Существенным отличием модуля LM-AN является наличие винтовых клемм. Это упрощает подключение к контроллеру различных внешних модулей, устройств. Внешние модули подключаются проводами к клеммам модуля.
Расположение пинов в модуле
Выводные ножки контроллера подключены к винтовым клеммам и размещены так, как показано на картинке ниже:
GND — клеммы для подключения минусового провода источника питания.
D0 — клемма цифрового пина. Так же TX
D1 — клемма цифрового пина. Так же RX
D2 — D13 — клеммы цифровых пинов процессора.
A0 — A7 — клеммы аналоговых пинов процессора.
Vcc — клемма подключения внешнего источника стабилизированного напряжения 5В
BAT — клемма подключения внешнего источника нестабилизированного напряжения 7-12В
Первые два вывода используются либо для связи по классическому последовательному интерфейсу с другим устройством, либо как порты для двоичных данных. В arduino nano распиновка 5…16 выводов, кроме указанных, имеет дополнительные функции:
D5 – прерывание INT0;
D6 – прерывание INT1 / ШИМ / AIN0;
D7 – таймер-счетчик T0 / шина I2C SDA / AIN1;
D8 – таймер-счетчик T1 / шина I2C SCL / ШИМ;
D3, D5, D6, D9,D10, D11 – ШИМ;
AIN0 и AIN1 – это входы быстродействующего аналогового компаратора. Кроме того, имеется 6 каналов с выходом широтно-импульсного модулятора (ШИМ). К тому же имеется большее число пинов, на которые могут быть переведены запросы прерываний.
Программирование контроллера осуществляется в среде Arduino IDE
Контроллер ARDUINO Uno Rev3 A000066
Внимание! Для полноценной работы сайта необходимо включить в браузере поддержку JavaScript.Как это сделать? Москва Связаться с нами
Режим работы
9:00 — 21:00
- Код товара: 721136
- Артикул: ARDUINO UNO REV3
В избранное
Сравнить
В избранное
Сравнить
Контроллер ARDUINO Uno Rev3 A000066- Описание
- Характеристики
- Отзывы
- Описание
- Характеристики
- Отзывы
ARDUINO Uno Rev3 A000066 сертифицирован для продажи в России.
Контроллер ARDUINO Uno Rev3 A000066 – фото, технические характеристики, условия доставки по Москве и России. Для того, чтобы купить контроллер ARDUINO Uno Rev3 A000066 в интернет-магазине Xcom-shop.ru, достаточно заполнить форму онлайн заказа или позвонить по телефонам: +7 (495) 799-96-69, +7 (800) 200-00-69.
Изображения товара, включая цвет, могут отличаться от реального внешнего вида. Комплектация также может быть изменена производителем без предварительного уведомления. Данное описание и количество товара не является публичной офертой.
Стартовый набор. Уровень 2 (контроллеры Ардуино)
Набор включает в себя учебное пособие, содержащее первые 7 уроков, диск с примерами готовых программ и программным обеспечением для работы с платой (Arduino IDE), а также контроллер на платформе Ардуино, макетную плату и совместимые с контроллером электронные компоненты, необходимые для проведения учебных экспериментов.
В процессе сборки описанных в книге схем вы познакомитесь с особенностями электронной платы контроллера, научитесь подключать ее к компьютеру и получите первые навыки создания программ.
Рабочее напряжение питания контроллера и всей периферии составляет 5 В, что делает работу с платой абсолютно безопасной.
Благодаря простоте взаимодействия с контроллером и понятному учебному пособию, любой человек сможет собрать свою первую работоспособную электронную схему и написать первую управляющую программу уже через 20 минут после открытия коробки с конструктором.
В стартовом наборе присутствует первая часть учебного курса, включающая в себя первые 7 уроков:
- Урок 1. Основы программирования.
- Урок 2. Управление светодиодом.
- Урок 3. Управление серводвигателем.
- Урок 4. Управление RGB светодиодом.
- Урок 5. Работа с кнопкой.
- Урок 6. Схема светофора.
- Урок 7. Работа с датчиками: термодатчик.
Конструктор предназначен для знакомства с платформой Ардуино и выработки базовых навыков программирования. Если в процессе прохождения обучающих уроков появится желание более подробно изучить возможности контроллера, то с помощью переходных наборов всегда можно перейти от стартового набора к основному или даже расширенному наборам, отличающимся значительно более богатой комплектацией.
В состав набора входят более 100 компонентов и устройств, а именно:
|
|
|
|
|
|
|
|
||
|
|
|
||
|
|
|
||
|
|
|
||
|
|
|
||
|
|
|
Для данного товара еще нет отзывов, ваш отзыв может стать первым!
Производитель: Эвольвектор
Серия: Программируемые контроллеры
Страна производитель: Россия
Возраст: 12-14 лет,от 14 и старше
Контроллер для квадрокоптера на базе Arduino своими руками||Arduino-diy.com
Для того, чтобы ваш квадрокоптер на Arduino благополучно взлетел, надо обеспечить минимальный вес всей конструкции.
В нем важен каждый грамм. Именно по этой причине часто используют миниатюрную Arduino Nano, которую устанавливают на монтажной плате. В этом проекте предложена конструкция платы управления для квадрокоптера с минимально необходимой обвязкой и платами Arduino Nano и GY80.
Какого-то супер концепта в предложенной конструкции нет. Ее можно сделать и получше, но надеюсь, что благодаря этим материалам у кого-то появятся собственные идеи или же вы воспользуетесь предложенным решением.
Arduino-контроллер для квадрокоптера
Ниже представлена информация о конструкции контроллера. Свободное пространство в правом верхнем углу было оставлено специально, чтобы была возможность расширить модуль. Например, установить GPS или ультразвуковой датчик расстояния.
Предложенная конструкция контроллера для квадрокоптера на Arduino Nano имеет ряд недостатков. Некоторые размышления на этот счет приведены ниже.
Вход BEC для питания квадрокоптера
Все, кроме одного контакта питания BEC (cистема питания приемника и квадрокоптера от силовой батареи и отключении мотора при достижении порогового напряжения) должны быть отключены. Порой на форумах люди заявляют, что несколько источников питания может вызывать неполадки из-за разницы в напряжениях (что очень похоже на правду, так как на них действительно разные регуляторы напряжения, хоть и очень маленькие). Отделить подключение сзади невозможно, так как там припаяно. Так что приходится отделять контакты моторов 2,3 и 4, чтобы в результате оставались только контакты сигнала и земли.
По сути эти источники питания BEC 5 В надо убрать или использовать в других целях. Например, можно предусмотреть дополнительный источник питания для контроллера, если первый перестал работать. Остальные BEC можно использовать для серводвигателей видеокамеры.
Расположение контактов для мотора и ресивера
Контакты для моторов желательно разместить в четырех различных углах для более простого доступа к ним. Контакты для ресивера (приемника) желательно располагать неподалеку от контактов питания.
Сокет для микроконтроллера
Для того, чтобы передавать данные по GPS или использовать ультразвуковой датчик расстояния с Arduino Nano, UNO или Pro Mini, нам понадобится дополнительный микроконтроллер. Он будет обрабатывать данные с GPS или сонар модулей и передавать их на плату контроллера полета через I2C.
Очень удобная фича — встроенный сокет для легкого подключения по I2C для периферийных устройств.
2 дополнительных контакта для моторов (для гексакоптера) показаны на риунке ниже.
Другие проекты контроллеров для квадрокоптеров
Ниже приведены несколько других проектов контроллеров для квадрокоптеров на базе Arduino.
Плата контроллера может использоваться для три- и квадрокоптера с возможностью дополнительной установки камеры и стабилизацией тангажа.
Для питания сенсоров используется 3.3 В постоянный ток от Arduino Nano.
Контроллер, выполненный в круглом форм-факторе. Контроллер можно использовать на три- и квадрокоптерах.
Еще один круглый контроллер. Может использоваться для три- и квадрокоптеров. Можно подключить видеокамеру. Предусмотрена стабилизация тангажа и крен.
Предусмотрена проверка питания. Если питание отсутствует, подается сигнал на динамик. Можно запитать плату от отдельного BEC. На контроллере установлен светодиод для отслеживания состояния и питания.
Есть интересные серийные контроллеры для квадрокоптера на Arduino. Например, в пердставленом ниже тоже используется круглый форм-фактор плат. Этот контроллер можно использовать для три- квадро-, гексакоптера. Поддерживаются все фичи MultiWii версии 1.6. Кроме того, на плате есть встроенный регулятор 3.3 вольт.
Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже. В дискуссии часто рождаются новые идеи и проекты!
Программное обеспечение | Arduino
Arduino Web Editor
Начните кодирование онлайн и сохраните свои эскизы в облаке. Самая последняя версия IDE включает в себя все библиотеки, а также поддерживает новые платы Arduino.КОД НАЧАЛО РАБОТЫ
Arduino IDE 1.8.15
Программное обеспечение Arduino с открытым исходным кодом (IDE) позволяет легко писать код и загружать его на плату. Это программное обеспечение можно использовать с любой платой Arduino.
Инструкции по установке см. На странице «Начало работы».
ИСХОДНЫЙ КОД
Активная разработка программного обеспечения Arduino ведется на GitHub. См. Инструкции по созданию кода. Архивы исходного кода последней версии доступны здесь. Архивы подписаны PGP, поэтому их можно проверить с помощью этого ключа gpg.
Arduino с Chromebook
Чтобы запрограммировать Arduino с Chromebook, вы можете использовать веб-редактор Arduino в Arduino Cloud. Настольная версия среды IDE недоступна в Chrome OS.
Экспериментальное программное обеспечение
Arduino IDE 2.0 beta (2.0.0-beta.11)
Новый основной выпуск Arduino IDE стал быстрее и мощнее! В дополнение к более современному редактору и более отзывчивому интерфейсу он имеет автозаполнение, навигацию по коду и даже живой отладчик.
Примечание. Это программное обеспечение все еще находится в статусе beta , что означает, что оно почти завершено, но могут возникнуть незначительные проблемы. Помогите нам протестировать его и поделитесь своим мнением на форуме!
Вы также можете найти дополнительную информацию о выпуске здесь.
ИСХОДНЫЙ КОД
Arduino IDE 2.0 имеет открытый исходный код, и ее исходный код размещен на GitHub.
Другие загрузки
ARDUINO YÚN LINUX OSOpenWRT — Yún 1.5.3 Обновление образа
Загрузите последнюю стабильную ОС GNU / Linux для вашего Yún. Это делает ваш Yún более стабильным и многофункциональным.
Простая процедура установки (рекомендуется)
Следуйте инструкциям руководства Yún sysupgrade.
Расширенная процедура установки
Эта процедура рекомендуется только опытным пользователям, которые хотят полностью перепрограммировать Yún, включая его загрузчик U-Boot.Эти инструкции по перепрошивке базовых образов предназначены только для справки. Следование им приведет к аннулированию гарантии Yún.
Условия использования
Загружая программное обеспечение с этой страницы, вы соглашаетесь с указанными условиями.
Программное обеспечение Arduino предоставляется вам «как есть», и мы не даем никаких явных или подразумеваемых гарантий в отношении его функциональности, работоспособности или использования, включая, помимо прочего, любые подразумеваемые гарантии товарной пригодности, пригодности для конкретной цель или нарушение.Мы прямо отказываемся от какой-либо ответственности за любые прямые, косвенные, побочные, случайные или особые убытки, включая, помимо прочего, упущенную выгоду, упущенную прибыль, убытки, возникшие в результате прерывания бизнеса или потери данных, независимо от формы иска или правовой теории в соответствии с ответственность за которые может быть возложена, даже если было сообщено о возможности или вероятности такого ущерба.
Arduino Game Controller — Arduino Project Hub
ВИДЕОVersion1
Version2
INTRO
Итак, этот пост будет о «DIY Gaming USB Controller» , который у нас есть недавно работал в ElectroPunkz Labs.
идея состоит в том, чтобы сделать дешевый USB-контроллер на базе Atmega32U с кнопками и аналоговыми джойстиками, который можно использовать для игр
, таких как NFS, GTA, Half-Life, LITTLE FIGHTER 2! и т. Д.
Мы сделали наш контроллер в двух форм-факторах, первый основан на конфигурации PS1 или SNES, а другой — это обычный USB-контроллер Xbox с аналоговыми джойстиками и кнопками (еще не доработан)
Мы собираемся Сделайте V1 в этом посте, который является контроллером макета PS1!
Лучше, если вы посмотрите видео проекта First-
МАТЕРИАЛЫАппаратное обеспечение довольно просто и легко получить (за исключением печатной платы, вы можете сделать свою собственную с прикрепленным файлом PDF с печатной платой)
- Arduino Leonardo / Pro Micro / Atmega32U
- Кнопки (тиковые переключатели)
- Печатная плата с индивидуальной гравировкой (матрица кнопок в формате PDF прилагается)
- Резисторы 10K
- Перемычки
Спасибо UTSOURCE.net предложить электронные компоненты для этого проекта! , вы можете проверить UTSOURCE.net, они имеют дело со всеми видами электронных компонентов, например, со всеми компонентами, используемыми в этом проекте!
ПРОЦЕСС СОЗДАНИЯ (Проводка, сборка , и т. Д.)
Первое, что нам нужно сделать, это подготовить базовую настройку, которая в основном состоит из 12 кнопок, подключенных в выпадающем меню Config с Pro Micro, в основном это —
мы проверили это на макетной плате, а затем подготовили печатную плату в соответствии с приведенной выше схемой.
После изготовления печатной платы (в каденции OrCad) мы распечатали ее верхний слой в формате PDF на глянцевой бумаге.
Я вырезал глянцевую бумагу по форме печатной платы, поместил ее на пластину, плакированную медью, и нагрел ее для переноса чернил с глянцевой бумаги на картон, плакированный медью. (Основной метод передачи тона, посмотрите мое видео по этой теме)
После того, как печатная плата была готова, мы бросили ее в раствор для травления и протравили печатную плату, после этого мы просто просверлили отверстия для компонентов и наш ПЛАТА КОНТРОЛЛЕРА ИГРЫ DIY готова!
Потом мы просто поставили все по схеме и схема была готова.
После подготовки схемы мы спроектировали и напечатали на 3D-принтере корпус / корпус печатной платы для контроллера в Fusion360.
Теперь нам просто нужно загрузить код и поиграть с ним в игры.
КОДЗагрузите код, указанный на Pro Micro.
совет, сначала тщательно проверьте свою плату / настройку, проверьте сопротивление и возможность соединения дорожек печатной платы, потому что если чего-то не хватает, это может вызвать много ошибок клавиатуры, потому что отсутствующие линии заземления будут посылать нерегулярные сигналы на контакты и ваш профессиональный микроконтроллер. будет продолжать нажимать случайные клавиши, что очень затруднит перепрограммирование Pro micro.
ТЕСТИРОВАНИЕПервое, что вам нужно сделать, это открыть Блокнот, начать нажимать клавиши вашего контроллера и проверить, отображают ли клавиши на прессе правильные слова, назначенные
, или просто используйте любое приложение для тестирования клавиатуры или веб-приложение.
Если все работает по коду, то откройте любую игру и начните играть в нее с помощью этой ИГРОВОЙ КОНСОЛИ DIY!
посмотрите видео-
ДАЛЬНЕЙШИЕ УЛУЧШЕНИЯ
Ну, первое, что я собираюсь добавить в эту настройку, это аналоговые джойстики для правильных игр, которые используют мышь для навигации по игроку, вроде XBOX ONE CONSOLE. .
V2 будет иметь правильную печатную плату с XBOX One Controller Layout, так что следите за обновлениями.
Оставьте комментарий, если у вас возникли проблемы!
Микроконтроллеры, платы, датчики и контроллеры Arduino
Что такое Ардуино?
Плата Arduino — это мини-компьютер, а также платформа с открытым исходным кодом, используемая для создания проектов электроники. Arduino состоит как из физической программируемой печатной платы (часто называемой микроконтроллером, так и из части программного обеспечения или интегрированной среды разработки Arduino), которая работает на вашем обычном компьютере.IDE Arduino используется для создания и записи, а затем загрузки этого компьютерного кода на физическую плату.
Платформа Arduino стала очень популярной за последние 10 лет, потому что код довольно прост для изучения, к тому же вам не нужно отдельное оборудование (называемое программатором) для загрузки нового кода на плату — вы просто используете USB-кабель для подключения платы Arduino к компьютеру и передачи файлов прямо на плату.
Отличий в платах Arduino.
Вы заметите, что здесь доступны разные платы Arduino. Отличия — это просто дополнения. Например, если вы хотите управлять электродвигателем или линейным приводом, вам понадобится модуль драйвера двигателя. Каждое дополнение выполняет разные функции в зависимости от того, чего вы хотите достичь. У нас есть коллекция микроконтроллеров, плат, экранов и связанных с ними датчиков и контроллеров Arduino, которые специально связаны с функциями для работы двигателя или линейного привода. Ардуино чрезвычайно универсальны и могут использоваться для программирования широкого спектра приложений и проектов.Позвоните нам, если вам нужна помощь в выборе того, что вам нужно.
Ресурсы Arduino
На страницах нашего блога и руководств у нас есть несколько проектов, о которых мы написали, чтобы помочь вам понять, как можно использовать плату Arduino для подключения к двигателям и приводам для выполнения различных функций. Например, мы создали статью, чтобы «показать вам, как синхронизировать 2 линейных привода с помощью Arduino». Эта статья, включающая код для вас, будет особенно полезна для людей, которым необходимо управлять двумя исполнительными механизмами одновременно и поддерживать работу обоих исполнительных механизмов с одинаковой скоростью.Это лишь один из миллионов способов, которыми Arduino может быть чрезвычайно полезен.
Arduino multiwii полетный контроллер
Помогите мне, поделившись этим постомЭто руководство разделено на 3 части: конструкция корпуса, радиоконтроллер и полетный контроллер.
Корпус дрона
Радиоуправление
Управление полетом
Полетный контроллер
Немного информации …
Полетный контроллер — это нервный центр дрона.Систем управления полетом дронов много и они разнообразны. От систем автопилота с поддержкой GPS, управляемых через двусторонние телеметрические каналы, до базовых систем стабилизации, использующих оборудование для радиоуправления любительского уровня, для вас есть проект с открытым исходным кодом.
Современные контроллеры полетов дронов могут проследить свои корни до радиоуправляемых вертолетов. Исторически сложилось так, что радиоуправляемые самолеты управлялись непосредственно по радио пилота. Вертолеты добавили в эту смесь новую морщину: хвостовые винты. Вертолеты используют свой хвостовой (или противовращающий) винт, чтобы противодействовать крутящему моменту несущего винта, пытающемуся вращать весь корпус вертолета.Все это прекрасно работает, когда вертолет парит, но как насчет того, чтобы пилот выбрал газ, чтобы вылететь? Когда пилот набирает обороты, крутящий момент увеличивается, что заставляет весь вертолет делать один или два пируэта, пока крутящий момент снова не выровняется. Эффект привел к тому, что более одного пилота-новичка столкнулись лицом к лицу со своим R / C вертолетом.
Решением этой проблемы были гироскопы, тяжелые латунные вращающиеся гири, которые наклонялись в ответ на движение вертолета. Датчик на эффекте Холла обнаружит этот наклон и даст команду рулевому винту противодействовать вращению вертолета.Шли годы, механические гироскопы были заменены твердотельными гироскопами MEMS. На сцену вышли микроконтроллеры, которые принесли с собой передовые технологии обработки. Затем были введены гироскопы удержания курса. В то время как старые гироскопы «только для скорости» дрейфовали, флюгеры и покачивались, гироскопы удержания курса блокировали нос вертолета, пока пилот не дал команду на поворот. Эти одноосные контроллеры полета были быстро приняты сообществом радиоуправляемых вертолетов.
В современных системах управления полетом доступно множество датчиков — GPS, датчики атмосферного давления, датчики воздушной скорости, список можно продолжить.Основной вклад в расчет полета по-прежнему вносят гироскопы в сочетании с акселерометрами. Как следует из названия, акселерометры измеряют ускорение — будь то сила тяжести, большой угол поворота или тормозная сила. Однако акселерометров недостаточно — акселерометр в свободном падении будет измерять 0 G. Поворачивающая сила сбивает с толку систему, пытающуюся работать исключительно с данными акселерометра. Вот тут-то и пригодятся гироскопы. Гироскопы измеряют скорость вращения вокруг оси. Так же, как в нашем примере с вертолетом, описанном выше, с закрытым рысканием, гироскопы можно использовать для измерения тангажа и крена самолета.Отличное сравнение гироскопов и акселерометров представлено в этом видео от InvenSense.
Часть 1: Схема гироскопа
Мы будем использовать модуль гироскопа и акселерометра MPU6050. У него есть связь i2c, и это удивительно, потому что ему нужны только 2 контакта от Arduino, часы и данные. Также вы можете подключить несколько модулей i2c к одному порту. Итак, если вы думаете о добавлении еще нескольких измерительных модулей, таких как барометр или магнитометр.
Так зачем нам гироскоп?
Что ж, дрон не сможет оставаться в прямом положении сам по себе, и управлять им без полетного контроллера было бы невозможно.Гиромодули обнаруживают любое движение по каждой из 3 осей. Обычно он возвращает микроконтроллеру значения числа оборотов в секунду. Используя эти значения, мы могли рассчитать угол полета дрона в каждый момент. Если мы знаем угол, мы всегда можем дать двигателям разную мощность для стабилизации и противодействия нежелательным силам.
Прежде чем мы рассмотрим схему полетного контроллера, давайте сначала разберемся, какой тип дронов мы собираемся построить. Мы построим дрон в форме квадроцикла, а это значит, что у него будет 4 двигателя, расположенных в форме крестовины.Для этого мы должны определить переднюю часть самолета. У нас будет два двигателя спереди и два сзади, как видно на рисунке ниже.
Теперь, когда мы определили переднюю часть дрона, мы можем установить его ось. Слева направо будет ось «X», а сверху вниз — ось «Y». Мы должны разместить полетный контроллер по центру. Он обнаружит быстрое движение дрона и отрегулирует сигнал ШИМ для каждого из четырех двигателей, чтобы стабилизировать дрон.
Мы видим, что у каждого двигателя есть номер. Это число соответствует цифровому контакту Arduino. Каждый двигатель имеет один сигнальный контакт для ESC. Мы также можем видеть, что каждый двигатель вращается по-своему, создавая особый воздушный вихрь. И задняя, и передняя пара мягких двигателей вращаются внутри дрона. Мы говорили об этом в конструкции тела.
Итак, теперь мы знаем, что контроллеру полета требуется 4 выходных контакта для каждого двигателя и подключенный к нему IMU (блок инерционного движения).Также требуется ввод от каждого из 6 каналов радиоприемника.
Схема ШИМ-приемника
С такой конфигурацией наш дрон мог бы без проблем летать. Мы можем добавить больше модулей, таких как магнитометр или барометр, но с гироскопом и акселерометром это пока нормально. Итак, мы снова используем липовую батарею дрона для питания контроллера полета. Подключите заземление и 11.V непосредственно к выводу Vin. У arduino NANO уже есть 5 и 3.3 регулятора напряжения. Мы подключаем контакты D3, D9, D10 и D11 к ESC каждого из четырех двигателей. Каждый esc также должен иметь общий доступ к Arduino, чтобы понимать сигналы pwm.
Подайте 5 В на модуль MPU6050 и на землю. Подключите контакты SDA (A4) и SCL (A5) к аналоговым контактам Arduino A4 и A5, и все готово. Не забудьте также разделить землю между полетным контроллером и радиоприемником. Вы можете видеть, что IMU MPU6050 также имеет оси «X» и «Y». Поместите модуль как можно по центру на дрон и соблюдая эту ось.
Это своего рода полная схема полетного контроллера. Мы можем установить приемник с 6 каналами, 4 регуляторами скорости и бесщеточными двигателями. Все должно иметь одну и ту же основу. Подайте 11,1 вольт на каждый ESC и на полетный контроллер Arduino. Подключите модуль i2c MPU6050 и поместите его в середину дрона.
Схема приемника PPM
Пришло время загрузить код полетного контроллера.
Часть 2: Код полетного контроллера
Контроллер полета Multiwii с суммой PPM
Чтобы запрограммировать наш код, у нас есть два варианта.Один из них — создать весь код для Arduino и создать ПИД-регулятор с данными от IMU и приемника и управлять дроном. Другой вариант — использовать уже протестированный код. В этой части мы воспользуемся вторым вариантом. Платформа, которую мы будем использовать, называется Multiwii. Multiwii — это платформа управления полетом, которая может адаптироваться к большому количеству летательных аппаратов. Дроны, самолеты, вертолеты и так далее. Контроллер полета должен считывать данные об ускорении и гироскопе с MPU uint.Затем он должен рассчитать реальный угол полета дрона и, используя операцию PID, управлять 4 двигателями и перемещать дрон в желаемом направлении. Хорошо, так что загрузите zip-файл multiwii по ссылке ниже.
Вы можете скачать платформу Multiwii
Разархивируйте файл. Внутри распакованной папки вы найдете код Arduino, который мы должны загрузить на плату полетного контроллера, а также платформу Java / Procesing для настройки платы в реальном времени. Откройте IDE Arduino. Теперь перейдите в папку и откройте файл.ino файл. Это откроет кучу библиотек. Зайдите в библиотеку config.h. Здесь мы сделаем конфигурацию нашего дрона. Нам не нужно ничего менять в других библиотеках. Сначала прокрутите вниз до типа мультикоптера.
Чтобы активировать любую конфигурацию, вы должны удалить только строку с двойной косой чертой, которая комментирует эту часть кода. Тип дрона, который я создаю, — это квадроцикл X с 4 двигателями, расположенными в форме буквы X. Теперь давайте прокрутим еще немного вниз.
Здесь мы определяем минимальный дроссель. Чтобы управлять двигателями, мы должны отправить сигнал ШИМ на esc. ШИМ модулируется путем изменения ширины импульса сигнала. Эта ширина измеряется в микросекундах. Моторы, которые я использую, имеют диапазон дроссельной заслонки от 1000 мкс до 2000 мкс, где 1000 означает полное отсутствие скорости, а 2000 — полный дроссель. Мне нравится работать на дроне с минимальным дросселем 1150 или 1200, потому что это гарантирует, что у меня не будет задержки двигателей, когда я начну управлять своим дроном. Это также означает, что двигатели будут вращаться на низких оборотах в режиме ожидания.Хорошо, я живу с максимальным газом на уровне 2000. Минимальная команда — это минимальный диапазон, который может послать радиоконтроллер. В этом случае это будет 1000 мкс. Мы увидим это, когда будем строить радиоконтроллер. Теперь прокрутите вниз до плат IMU.
Раскомментирую тот, в котором есть модуль MPU 60 50. Я выбираю плату NANOwii, поскольку она предназначена для Arduino anno с платой MPU6050. Следующим шагом является установление связи PPM между приемником радиоконтроллера и полетным контроллером.Приемник, который мы создадим, будет посылать 8-канальный сигнал PPM со значениями газа, рыскания, тангажа и крена. Для этого типа контролируйте F, чтобы открыть вкладку поиска. Теперь введите PPM и щелкните поиск.
Здесь в приемнике суммы PPM добавьте эту строку.
#define SERIAL_SUM_PPM THROTTLE, YAW, PITCH, ROLL, AUX1, AUX2, AUX3, AUX4,8,9,10,11 // BELECTRONOOBS
Это порядок каналов PPM, которые мы будем получать. Теперь сохраните и скомпилируйте код. Подключите Arduino полетного контроллера к USB и загрузите код.Наш полетный контроллер готов. Теперь, чтобы проверить это, откройте приложение Java из другой папки. Оставьте Arduino подключенным к USB и выберите соответствующий com. Нажмите «Пуск» и переместите полетный контроллер.
Как видите, у нас есть приличный живой контроль над доской. Вы можете редактировать значения PID, откалибровать датчик или изменить команды.
Помогите мне, поделившись этим постомКонтроллер робота ArduPRO (с Arduino Nano) Jsumo
на базе ArduinoUltimate контроллер для проектов роботов на базе Arduino.Высокая эффективность, простая в использовании материнская плата для ваших проектов.
Наш идеальный контроллер для проектов роботов на базе Arduino. Мы настоятельно рекомендуем этот контроллер для проектов Sumo Robot.
Плата включает мозг как Arduino Nano (* Почти такой же, как контроллер Arduino Uno, только меньшие размеры).
Преимущества:
- Режим переключения Высокоэффективный регулятор 5 В. + Входное напряжение может быть от 7В до 32В.Регулятор имеет защиту от короткого замыкания. И может дать общий выход 500 мА.
- Легко прикрепить все датчики и дополнительные платы с помощью только шлицевой отвертки.
Характеристики:
- 2 x тримпа: подключаются к контактам A6-A7.
- 1 x кнопка пуска, пусковой вход (для пусковых модулей), подключенный к выводу D4.
- 1 пользовательский светодиод: подключен к контакту D13.
- 1 x переключатель Mosfet: N-канальный Mosfet логического уровня, подключенный к контакту A4.Может использоваться для переключения механизмов, флагов и т. Д.
- 3 x DIP-переключателя: подключены к контактам D0-D1-D2 (могут использоваться для режима запуска робота-сумо и выбора тактики)
- Перемычки выбора 2 x Vin-5V: используются для выбора напряжения на клеммах. Входное напряжение или регулируемое напряжение 5 В.
Свободные контакты в зеленых клеммах
ArduPRO имеет 13 свободных контактов, которые можно использовать для любых целей. (Arduino Nano имеет всего 22 ввода / вывода, 9-контактный используется внутри контроллера)
Пример сценария подключения контактов для Sumo Robot
- 5 датчиков противника: подключены от D8 к D12.
- 4 Edge (белая линия) датчика: подключены к A0 — A3.
- 4 контакта управления двигателем: 2 контакта PWM, 2 контакта направления. (D3, D5, D6, D7)
Кстати, с ArduPRO вы можете использовать кнопку «Пуск», тактический микропереключатель, светодиоды пользователя и переключатель MOSFET.
Как вы запрограммируете свой ArduPRO?
Легко! Просто используйте кабель micro USB, который мы отправляем с ArduPRO. Вы можете напрямую запрограммировать свой Arduino Nano, пока он находится на плате.
Что входит?
- Главный контроллер ArduPRO
- Плата Arduino Nano
- Кабель мини-USB
Прототипирование сети контроллеров
с помощью Arduino, Вильфрид Восс
Мягкая обложка: 44 страницы
Издатель: Copperhill Media Corporation (31 марта 2014 г.)
Язык: Английский
ISBN-10: 1938581164
ISBN-13: 978-1938581168
Размеры продукта: 7.4 x 0,1 x 9,7 дюйма
https://copperhilltech.com/controller-area-network-can-bus-prototyping-with-the-arduino-uno/
Несмотря на то, что Arduino не считается промышленным решением, благодаря своей низкой цене и простоте программирования он обеспечивает идеальную платформу для создания прототипов для всех видов приложений Controller Area Network (CAN).
Эта книга, написанная ведущим экспертом по технологиям CAN, проведет читателя через процесс приобретения всех необходимых аппаратных и программных компонентов, реализацию драйвера CAN и реализацию программ (эскизов Arduino) для чтения, отправки и обработки. , а также отображать данные из и в сеть CAN.Коллекция примеров программирования объединяется в полноценный шлюз USB-to-CAN, взаимодействующий с ПК с Windows / Linux.
Эта книга позволит вам достичь функциональности CAN буквально за несколько часов.
Темы включают:
- Введение в сеть контроллеров
- Оборудование для прототипирования и его варианты
- Экраны CAN для Arduino
- Реализация драйвера CAN и функции библиотеки
- Простые программы тестирования CAN
- Программа мониторинга, моделирования и диагностики сети CAN
- Отображение данных CAN через графический интерфейс пользователя Windows / Linux
Образцы проектов Arduino / Visual Studio Скачать
Следующие примеры программирования (доступны как.zip-файлы) являются бесплатными программами; вы можете распространять и / или изменять его в соответствии с условиями Стандартной общественной лицензии ограниченного применения GNU, опубликованной Free Software Foundation; либо версии 2.1 Лицензии, либо (по вашему выбору) любой более поздней версии. Образцы распространяются в надежде, что они будут полезны, но БЕЗ КАКИХ-ЛИБО ГАРАНТИЙ; даже без подразумеваемой гарантии ТОВАРНОЙ ПРИГОДНОСТИ или ПРИГОДНОСТИ ДЛЯ КОНКРЕТНОЙ ЦЕЛИ. Скачивая эти программы, вы подтверждаете, что эти образцы кода и проекты были созданы только для демонстрационных и образовательных целей.
Содержание
1. Введение в сеть контроллеров
2. Прототип оборудования и его варианты
2.1 Ардуино
2.2 Intel Galileo
2.3 Плата микроконтроллера LeafLabs Maple
3. Шилды Arduino CAN
3.1 Контроллер Microchip MCP2515 CAN
3.2 Arduino CAN-Bus Shield от SK Pang electronics
3.3 Экран CAN-BUS от Seeed Studio
4. Эскизы CAN Arduino
4.1 Библиотека MCP2515
4.1.1 Вызов функций
4.1.2 Реализация
4.2 Программирование CAN
4.2.1 Простой тест CAN Shield
4.2.2 Расширенный тест CAN Shield
4.2.3 Простая программа мониторинга и диагностики сети CAN
4.3 Мониторинг сети CAN под Windows
5 Заключение
Приложение — Рекомендуемая литература
Саймона Монка
Ясные, простые для понимания примеры показывают, как легко программировать Arduino! «Программирование Arduino: начало работы с эскизами» помогает вам понять программную сторону Arduino и объясняет, как писать хорошо продуманные эскизы (название, данное программам Arduino), используя язык C Arduino.Это практическое руководство предлагает простой и лаконичный подход для непрограммистов, который сразу же поможет вам приступить к работе.
Программирование Arduino: начало работы с набросками объясняет основные концепции и синтаксис C простым языком и наглядными примерами, разработанными для абсолютных новичков — предварительные знания программирования не требуются. Он проведет вас от базовых до продвинутых концепций программирования на C и содержит десятки конкретных примеров, которые иллюстрируют концепции и могут использоваться как есть или изменяться в соответствии с вашими целями.
- Весь код из книги доступен для скачивания.
- Помогает быстро разрабатывать рабочие эскизы.
Охват включает: основы языка C; Функции; Массивы, строки; Ввод, вывод; Полезности стандартной библиотеки; Место хранения; ЖК-дисплеи; Программирование для Интернета; Дизайн программы; C ++ и написание библиотек
Дополнительная информация …
Arduino Базовый контроллер УЦИ | Юрия Игрушки
Индекс страницы
| Arduino DRO Контроллер для весов iGaging |
Описание
Это базовая версия контроллера DRO, построенного на базе набора Arduino на базе ATMega168 или ATMega328, например Arduino UNO, Arduino Nano и др.Он может считывать до четырех шкал iGaging DigiMag и / или AccuRemote Remote DRO и направленного тахометра.
Рышард Малиновски внес существенные изменения в мой первоначальный эскиз Arduino v3. Его версия обрабатывает датчики HAL и низкие обороты намного лучше, чем оригинальная версия. Документацию и ссылки для скачивания можно найти на его сайте
По сравнению с контроллером MSP430 Basic DRO , стоимость сборки может быть немного выше, особенно при использовании фирменной марки. Плата Arduino.Тем не менее, главным преимуществом этого контроллера является широкая доступность запчастей. За исключением Модуль приемопередатчика Bluetooth все необходимые компоненты доступны [в США] в Radio Shack и многих других магазинах электроники. Более того, поскольку адаптер Arduino Serial-to-USB поддерживается TouchDRO, никаких дополнительных деталей для этого не требуется. Возможность подключения по USB.
Плюсы
- Детали, доступные в большинстве стран мира
- Прошивка, которую легко изменить и / или загрузить
- Может использоваться с USB-соединением без дополнительных деталей
Минусы
- Немного дороже, чем базовая версия MSP430
- Требуется больше деталей
- Только для весов iGaging / AccuRemote
Технические характеристики
- Микроконтроллер
- ATMega168 или ATMega328
- Тактовая частота
- 16 МГц (8 МГц при 3.3 В)
- Поддерживаемый формат шкалы
- 21 бит (Shahe / iGaging Remote DRO и AccuRemote)
- Поддерживаемые оси
- 4
- Опора тахометра
- Да (направленный)
- Частота обновления шкалы
- 24 Гц (такт 90 кГц)
- Частота обновления тахометра
- 2 Гц
- Частота обновления позиции
- 10 Гц
- Скорость UART
- 9600 бод
Список запчастей
* Комплект резисторов Sparkfun 500 1 / 4W от Amazon или Sparkfun.
