Как рассчитывается КПД синхронного двигателя. Какие основные виды потерь возникают в синхронных машинах. Как различные факторы влияют на эффективность работы синхронных двигателей. Способы повышения КПД синхронных электродвигателей.
Виды потерь энергии в синхронных двигателях
В процессе работы синхронного двигателя неизбежно возникают различные виды потерь энергии, снижающие его эффективность. Основные виды потерь включают:
- Электрические потери в обмотках статора и ротора
- Магнитные потери в стали статора и ротора
- Механические потери на трение и вентиляцию
- Добавочные потери
Рассмотрим подробнее каждый вид потерь и факторы, влияющие на их величину.
Электрические потери
Электрические потери возникают из-за нагрева проводников обмоток при прохождении по ним тока. Они пропорциональны квадрату тока и активному сопротивлению обмоток:
- В обмотке статора: Pэл1 = m1I12R1
Где m1 — число фаз статора, I — ток, R — активное сопротивление обмотки.
Магнитные потери
Магнитные потери возникают в стальных сердечниках статора и ротора из-за перемагничивания и вихревых токов. Они зависят от частоты перемагничивания и величины магнитной индукции:
Pмаг = Pг + Pв
Где Pг — потери на гистерезис, Pв — потери на вихревые токи.
Механические потери
Механические потери включают потери на трение в подшипниках и вентиляционные потери. Они зависят от частоты вращения двигателя:
Pмех = Pтр + Pвент
Добавочные потери
Добавочные потери обусловлены пульсациями магнитного поля в зазоре, высшими гармониками и др. Они обычно принимаются равными 0.5-1% от подводимой мощности.
Расчет КПД синхронного двигателя
Коэффициент полезного действия синхронного двигателя определяется как отношение полезной механической мощности на валу к подводимой электрической мощности:
η = P2 / P1 = P2 / (P2 + ΣP)
Где P2 — полезная мощность, ΣP — сумма всех потерь.
КПД современных синхронных двигателей достигает 95-98% в номинальном режиме работы. Однако при неполной нагрузке КПД снижается.

Факторы, влияющие на КПД синхронного двигателя
На величину КПД синхронного двигателя оказывают влияние следующие основные факторы:
- Нагрузка двигателя — при снижении нагрузки КПД уменьшается
- Напряжение питания — отклонение от номинального снижает КПД
- Частота питающего напряжения — влияет на магнитные потери
- Температура обмоток — повышение температуры увеличивает потери
- Качество активных материалов — влияет на магнитные и электрические потери
Способы повышения КПД синхронных двигателей
Для повышения энергоэффективности синхронных двигателей применяются следующие основные методы:
- Использование высококачественных магнитных и проводниковых материалов
- Оптимизация геометрии магнитной системы
- Применение эффективных систем охлаждения
- Снижение воздушного зазора между статором и ротором
- Оптимизация режимов работы двигателя
Комплексное применение данных мер позволяет создавать современные высокоэффективные синхронные двигатели с минимальными потерями энергии.
Сравнение КПД синхронных и асинхронных двигателей
Синхронные двигатели имеют ряд преимуществ по сравнению с асинхронными в плане энергоэффективности:

- Более высокий КПД, особенно при неполной нагрузке
- Возможность работы с опережающим коэффициентом мощности
- Отсутствие потерь на скольжение в роторе
- Меньшие потери в обмотках статора
Это делает синхронные двигатели более предпочтительными для применений, требующих высокой энергоэффективности.
Влияние нагрузки на КПД синхронного двигателя
Зависимость КПД синхронного двигателя от нагрузки имеет характерный вид:
- При малых нагрузках (менее 25-30% от номинальной) КПД резко снижается
- Максимум КПД достигается при нагрузке 75-90% от номинальной
- При перегрузке свыше номинальной КПД также снижается
Поэтому для обеспечения высокой энергоэффективности важно правильно выбирать мощность двигателя под конкретную нагрузку.
Заключение
Анализ потерь и КПД синхронных двигателей позволяет оценить их энергетическую эффективность и выявить пути ее повышения. Комплексный подход к оптимизации конструкции и режимов работы дает возможность создавать современные высокоэффективные синхронные электродвигатели с минимальными потерями энергии.

7.11 Потери и кпд синхронных машин
Преобразование энергии в синхронной машине связано с потерями энергии. Все виды потерь в синхронной машине разделяются на основные и добавочные. Основные потери слагаются, в свою очередь, из электрических потерь в обмотке статора, потерь на возбуждение, магнитных и механических потерь.
Электрические потери в обмотке статора определяются
, | (7.12) |
где r1 – активное сопротивление одной фазы обмотки статора.
Потери на возбуждение зависят от типа возбудителя и определяются как:
, | (7. |
 13)
13)где =2 В – падение напряжения в щеточном контакте.
Магнитные потери происходят в сердечнике статора, который подвергается перемагничиванию вращающимся магнитным полем. Эти потери состоят из потерь на гистерезис и потерь от вихревых токов:
(7.14) |
Механические потери равны сумме потерь на трение в подшипниках и вентиляцию.
Добавочные потери в синхронных машинах делятся на два вида: пульсационные потери в полюсных наконечниках ротора и потери при нагрузке. Добавочные пульсационные потери
 Добавочные потери при
нагрузке Рдоб определяются
в процентах (≈0,5%) от подводимой мощности
двигателей или от полезной мощности
генераторов.
Добавочные потери при
нагрузке Рдоб определяются
в процентах (≈0,5%) от подводимой мощности
двигателей или от полезной мощности
генераторов.Суммарные потери в синхронной машине
. | (7.15) |
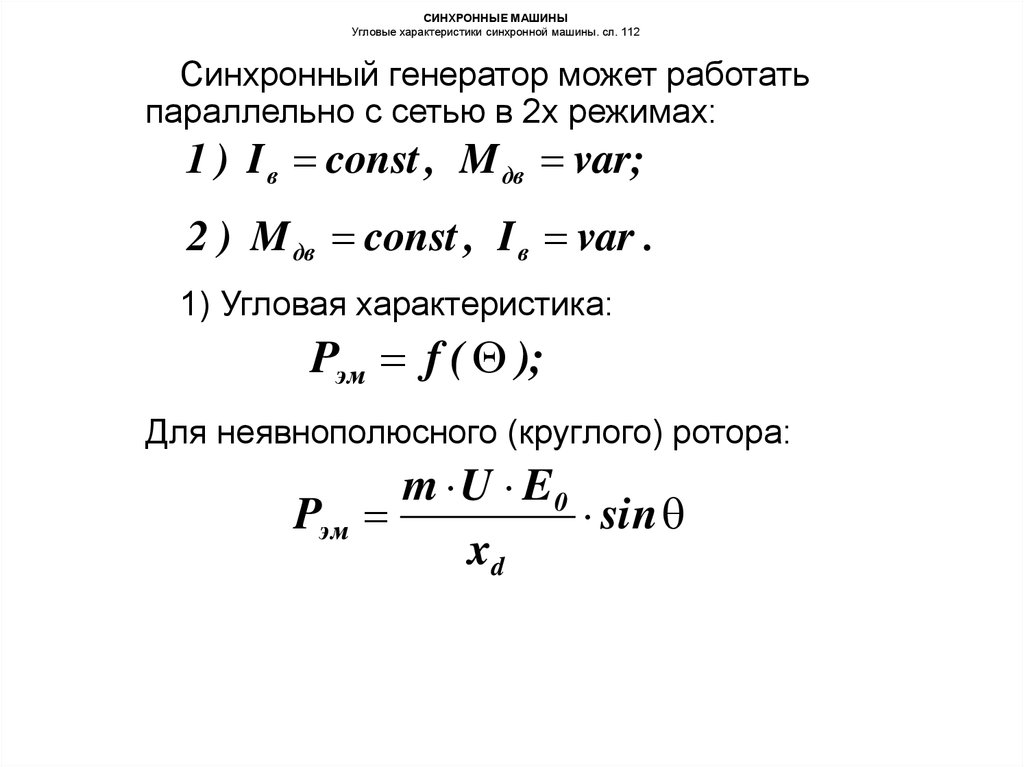
Коэффициент полезного действия для синхронного генератора
, | (7.16) |
где Рном – активная мощность, отбираемая от генератора при его номинальной нагрузке.
Коэффициент полезного действия для синхронного двигателя
. | (7.17) |

Если обмотка возбуждения неподвижного ротора синхронного двигателя подключена к источнику постоянного тока, то она создает основной магнитный поток, который определяет полярность полюсов ротора (рисунок 7.7). При включении обмотки статора его трехфазная система токов создает вращающийся магнитный поток, частота вращения которого определяется формулой 7.11. При числе пар полюсов р=1 и f=50 Гц частота вращения будет равна
Основными
способами пуска в ход синхронных
двигателей являются асинхронный
пуск и пуск с помощью
разгонного двигателя.
Для осуществления асинхронного пуска на роторе синхронного двигателя располагают специальную пусковую обмотку, которая является короткозамкнутой. При подключении обмотки статора к сети создается вращающийся магнитный поток статора. Короткозамкнутая обмотка ротора в результате взаимодействия с вращающимся потоком статора создает асинхронный вращающийся момент, под действием которого ротор трогается с места и разгоняется до частоты вращения, близкой к синхронной частоте. После этого обмотку возбуждения переключают на источник постоянного тока, и полюсы ротора приобретают собственную полярность.
n
Рисунок 7.7 – Основной магнитный поток синхронного двигателя
При
незначительном различии в частотах
вращения полюсов статора и ротора
разноименные полюсы притягиваются
друг к другу, а одноименные – отталкиваются.
В результате ротор получает ускорение
и после нескольких качаний ротора его
частота вращения достигает синхронной
и двигатель «втягивается в синхронизм».
Пуск с помощью разгонного двигателя осуществляют только при холостом ходе двигателя. При этом его ротор приводят во вращение разгонным двигателем (асинхронным или постоянного тока). Мощность разгонного двигателя небольшая, необходимая для вращения ротора синхронного двигателя.
С помощью синхроскопа проверяют выполнение условий параллельной работы синхронных машин, и когда они выполнены, статор синхронного двигателя подключают к сети. После этого разгонный двигатель отключают, а синхронный – вращается с синхронной частотой.
КПД и стоимость синхронного реактивного двигателя
В статье приводится сравнение синхронного реактивного двигателя (СРД), разработанного ООО «ЭМАШ», с другими типами серийно производимых двигателей для регулируемого привода: асинхронным (АД) и синхронным двигателем с постоянными магнитами (ПМ) (рис. 1). Параметрами сравнения являются энергоэффективность, масса и стоимость активных материалов, необходимых для производства машины.
Рис. 1. Эскизы конструкции
Асинхронные двигатели (рис. 1а) широко применяются в самых различных приложениях благодаря низкой стоимости и высокой надежности. Тем не менее к настоящему времени они уже достигли предела своего конструктивного и технологического совершенствования. Дальнейшее улучшение КПД этих двигателей возможно лишь экстенсивными методами: использование большего количества меди и стали, а также использование медной беличьей клетки ротора вместо алюминиевой, применяемой традиционно.
Основным недостатком таких решений является увеличение размеров АД и его стоимости. Более того, наличие медной беличьей клетки ротора приводит к значительному усложнению и удорожанию технологии производства этих двигателей из-за высокой температуры плавления меди. Оставаясь приемлемыми по стоимости, они могут соответствовать лишь классу эффективности IE3. Классы энергоэффективности (IE-классы) здесь и далее определены, согласно стандарту IEC 60034-30-2 Rotating electrical machines – Part 30-2:Efficiency classes of variable speed AC motors (IE-code).
Будем знакомы |
Научно-исследовательская компания ООО “ЭМАШ” (г. Екатеринбург) специализируется на разработке энергоэффективных электрических двигателей и генераторов для производителей электрических машин. Основные электромашины, проектируемые компанией, — синхронные реактивные двигатели, высокоскоростные двигатели и многополюсные безредукторные высокомоментные двигатели. |
Традиционно самым энергоэффективным типом двигателя считается синхронный двигатель с ПМ. Многие производители (например, WEG, Yaskawa, Emerson и др.) предлагают комплектные электроприводы на базе двигателя с магнитами в роторе (англ. interior permanent magnet synchronous motor, рис. 1в). Основным недостатком такого решения является высокая стоимость по причине применения в конструкции двигателя дорогостоящих редкоземельных магнитов.
Цены на редкоземельные магниты не только высокие, но и нестабильные, так как монополией на добычу сырья для них владеет Китай.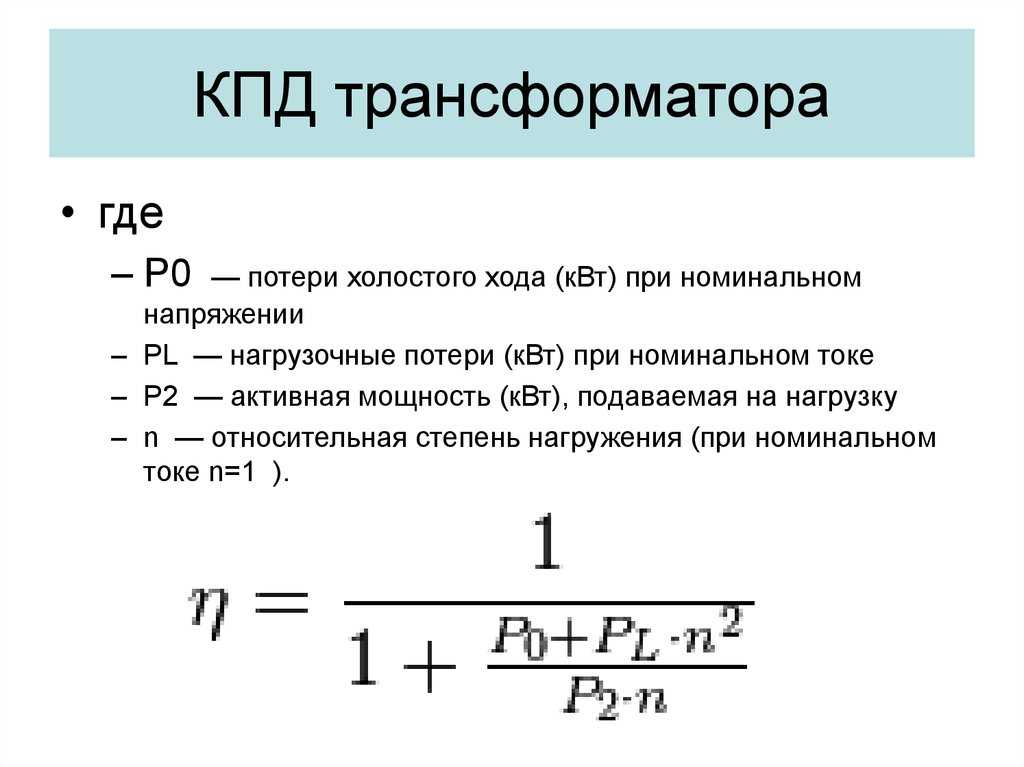 Из-за этого стоимость магнитов может измениться в 2–3 раза в течение нескольких лет. Для примера, рис. 2 демонстрирует динамику цен на некоторые редкоземельные металлы за 2008–2014 годы [1].
Из-за этого стоимость магнитов может измениться в 2–3 раза в течение нескольких лет. Для примера, рис. 2 демонстрирует динамику цен на некоторые редкоземельные металлы за 2008–2014 годы [1].
Рис. 2. История цен на редкоземельные металлы на мировом рынке [1].
Наряду с вышеупомянутыми типами двигателей все большее распространение получает синхронный реактивный двигатель (СРД, рис. 1б). Он отличается отсутствием в конструкции постоянных магнитов, что обуславливает значительно большую надежность конструкции и намного меньшую стоимость производства, в сравнении с двигателями с ПМ. В настоящее время СРД с классами энергоэфективности IE3 и IE4 производятся рядом европейских производителей (ABB, Siemens, KSB, Sicme Motori и др.). Кроме того, можно отметить отечественные компании – «РУСЭЛПРОМ» и ПАО «НИПТИЭМ» разработали несколько синхронных реактивных двигателей, а предприятие «Автоматизированные системы и комплексы» начало разработку алгоритма управления для СРД в своем преобразователе частоты (ПЧ). На выставке Hannover messe-2018 китайская компания Shenzhen Best Motion Technology Limited продемонстрировала 15 кВт СРД, а корейская компания Hyosung разместила на своем сайте информацию о своих СРД.
На выставке Hannover messe-2018 китайская компания Shenzhen Best Motion Technology Limited продемонстрировала 15 кВт СРД, а корейская компания Hyosung разместила на своем сайте информацию о своих СРД.
Многими компаниями также производятся преобразователи частоты, поддерживающие работу с СРД без датчика положения ротора (ABB, Siemens, KSB, Danfoss, Invertek, KEB, Delta Electronics, Yaskawa, Schneider Electric и др.).
Компанией ООО «ЭМАШ» был разработан СРД оригинальной запатентованной конструкции, соответствующий классу энергоэффективности IE5 (на рис. 3а изображен лист ротора).
Рис.3
Типичными приложениями регулируемого привода являются насосные установки систем отопления, вентиляции и кондиционирования, а также промышленные центробежные насосы. В таких приложениях двигатель большую часть времени работает с нагрузкой меньше, чем номинальная. Поэтому в этом случае требуется высокий КПД двигателя не только в номинальном режиме, но и в широком диапазоне скоростей и моментов. Зависимость механического момента на валу T от скорости вращения двигателя n в таких приложениях в первом приближении можно считать квадратичной.
Зависимость механического момента на валу T от скорости вращения двигателя n в таких приложениях в первом приближении можно считать квадратичной.
Рис. 4 и рис. 5 демонстрируют сравнение КПД приводов (показан суммарный КПД «двигатель + ПЧ») мощностью 1,1 кВт/3000 об/мин для насосной нагрузки (T ~ n2). КПД СРД оказывается существенно выше, чем у других приводов, во всем диапазоне скоростей и нагрузок. В диапазоне от 175 Вт до 1,1 кВт КПД СРД привода, по крайней мере, на 10 % выше, чем у асинхронного двигателя. В режиме номинальной нагрузки КПД выше, чем у двигатель с ПМ на 4,6 %. Однако в режиме малых нагрузок эта разница составляет уже около 18 %. Рассматриваемому диапазону мощности соответствует диапазон скорости вращения от 1500 до 2950 об/мин.
Рис. 4. КПД в зависимости от механической мощности для приводов 1,1 кВт, 3000 об/мин (T ~ n2)
Рис. 5 КПД в зависимости от скорости вращения для приводов 1,1 кВт, 3000 об/мин (T ~ n2)
Основным фактором низких потерь СРД при малой нагрузке в сравнении с асинхронным двигателем является отсутствие электрических потерь в беличьей клетке ротора.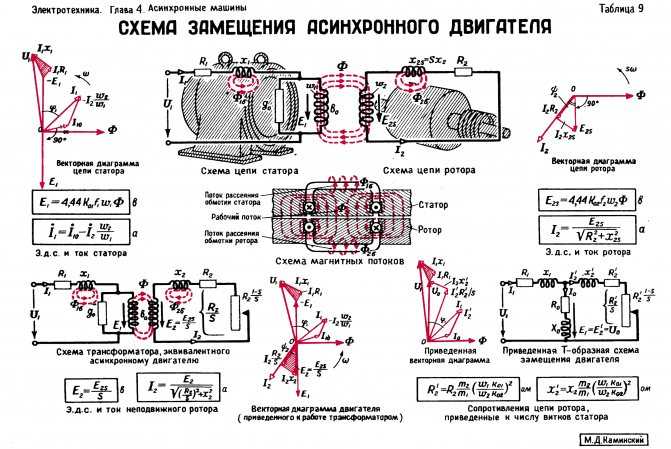 Если сравнивать СРД с ПМ двигателем – здесь основным фактором становится отсутствие нерегулируемого потока постоянных магнитов, который вызывает в машинах такого типа большие потери холостого хода.
Если сравнивать СРД с ПМ двигателем – здесь основным фактором становится отсутствие нерегулируемого потока постоянных магнитов, который вызывает в машинах такого типа большие потери холостого хода.
Результаты по КПД для СРД (производитель «ЭМАШ») и двигателя с ПМ были измерены, согласно IEC 60034-30-2:2016 Rotating electrical machines – Part 2-3: Specific test methods for determining losses and efficiency of converter-fed AC induction motors, при применении «прямого» метода 2-3-C (Input-output) (рис. 3б).
Результаты по КПД для АД (модель M2BAX 80 MB 2, класс IE2, производитель ABB) были получены с использованием программы ABB DriveSize Simulation Tool.
Таблица 1 показывает оценку массы и стоимости активных материалов, необходимых для производства рассматрива- емых двигателей. При расчете были приняты следующие цены: 1 $/кг для стали, 7 $/кг для меди, 2 $/кг для алюминия, 98 $/кг для постоянных магнитов.
Табл. 1. Масса и стоимость активных материалов двигателей 1,1 кВт, 3000 об/мин
СРД | АД | Двигатель с ПМ | |
Медь, кг | 1,85 | 1,45 | 0,323 |
Электротехническая сталь, кг | 3,75 | 5,34 | 1,29 |
Алюминий (беличья клеть), кг | — | 0,37 | — |
Магниты (Nd-Fe-B), кг | — | — | 0,184 |
Масса активных материалов, кг | 5,60 | 7,16 | 1,80 |
Масса двигателя с учетом корпуса, кг | 9,5 | 11,0 | 5,2 |
Медь, $ | 12,95 | 10,13 | 2,261 |
Электротехническая сталь, $ | 3,75 | 5,34 | 1,29 |
Алюминий (беличья клеть), $ | — | 0,74 | — |
Магниты (Nd-Fe-B), $ | — | — | 18,03 |
Общая стоимость активных материалов, $ | 16,70 | 16,22 | 21,58 |
Можно отметить, что синхронный двигатель с постоянными магнитами будет еще более проигрывать по стоимости производства при учете усложнения технологии производства по сравнению с СРД и АД.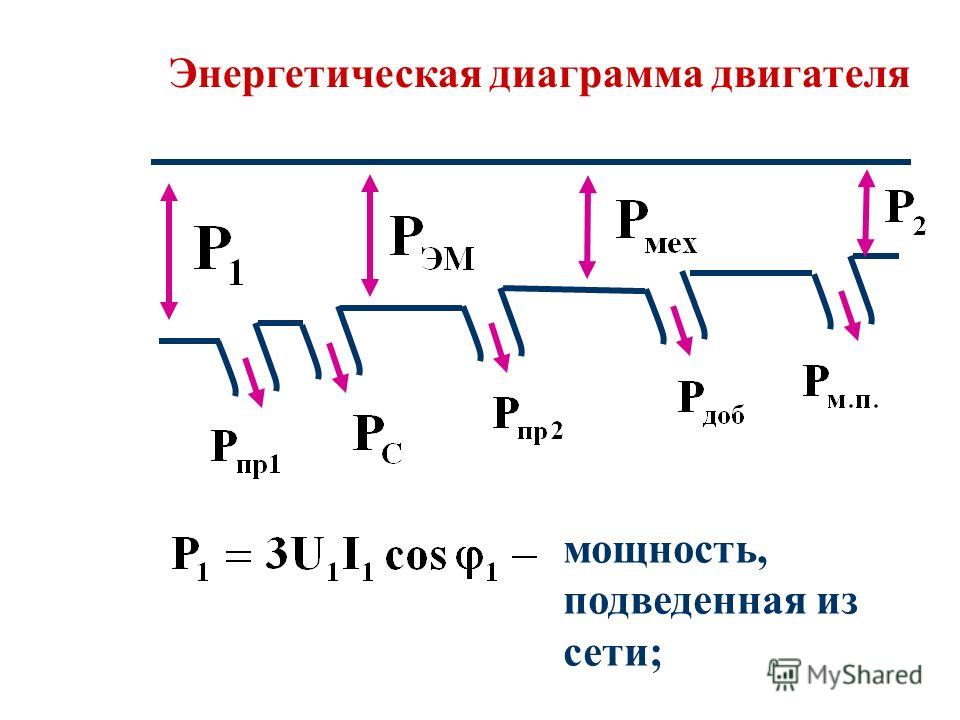 В то же время синхронный реактивный двигатель, не имеющий литой клетки и магнитов в роторе, обеспечивает самую простую среди рассматриваемых вариантов технологию производства.
В то же время синхронный реактивный двигатель, не имеющий литой клетки и магнитов в роторе, обеспечивает самую простую среди рассматриваемых вариантов технологию производства.
По результатам проведенного сопоставления можно заключить, что если решающими являются КПД и стоимость двигателя (например, в таких приложениях, как насосы, вентиляторы, компрессоры), то применение СРД в регулируемом электроприводе является более предпочтительным, чем использование асинхронного двигателя или двигателя с ПМ. Применение же дорогих синхронных двигателей с постоянными магнитами более оправданно в тех случаях, когда требуется снизить габариты машины (например, электротранспорт, мотор-колеса, авиация, сервосистемы и т. д.).
В. А. Прахт, к. т. н.,
директор ООО «ЭМАШ», заведующий лабораторией
«Электрических машин» Уральского федерального университета
Источники:
1. J. Widmer, R. Martin, M.Kimiabeigi, “Electric vehicle traction motors without rare earth magnets”, in Sustainable Materials and Technologies, Volume 3, Pages 7-13, DOI: 10. 1016/j. susmat.2015.02.001, April 2015.
1016/j. susmat.2015.02.001, April 2015.
Синхронные двигатели против асинхронных двигателей
Электродвигатели бывают сотен размеров, форм и разновидностей, и огромное количество вариантов может парализовать поиск лучшего варианта.
Первым шагом в поиске любого двигателя является определение его источника питания; он питается от переменного тока или постоянного? Это разделит варианты на две широкие категории: двигатели переменного тока и двигатели постоянного тока, а также исключит любые двигатели, которые не будут работать с вашим источником питания. Тем не менее, обе эти категории по-прежнему содержат множество типов машин, поэтому эта статья поможет еще больше дифференцировать класс двигателей переменного тока (наша статья о бесщеточных и щеточных двигателях постоянного тока посвящена широким типам двигателей постоянного тока). Двигатели переменного тока можно разделить на синхронные двигатели и асинхронные двигатели, и в этой статье будет дано краткое объяснение обоих, а также сравнение их рабочих характеристик и областей применения.
Асинхронные двигатели
Асинхронные двигатели считаются одними из, если не самыми распространенными двигателями переменного тока, используемыми сегодня в промышленности. Они были одними из первых изобретенных электродвигателей, поэтому у них было достаточно времени для оптимизации для работы во многих приложениях. Они имеют относительно простую конструкцию, состоящую из внешнего статора и внутреннего ротора, которые взаимодействуют посредством эффекта электромагнитной индукции, создавая механическое вращение. Определенные типы асинхронных двигателей достигают этого вращения по-разному, и, пожалуйста, не стесняйтесь читать наши статьи о двигателях с короткозамкнутым ротором, двигателях с фазным ротором и однофазных промышленных двигателях, чтобы узнать больше. Однако, вообще говоря, цель асинхронных двигателей состоит в том, чтобы пропускать переменный ток через катушки в статоре, которые будут создавать магнитное поле, а частота колебаний источника переменного тока заставит это магнитное поле вращаться.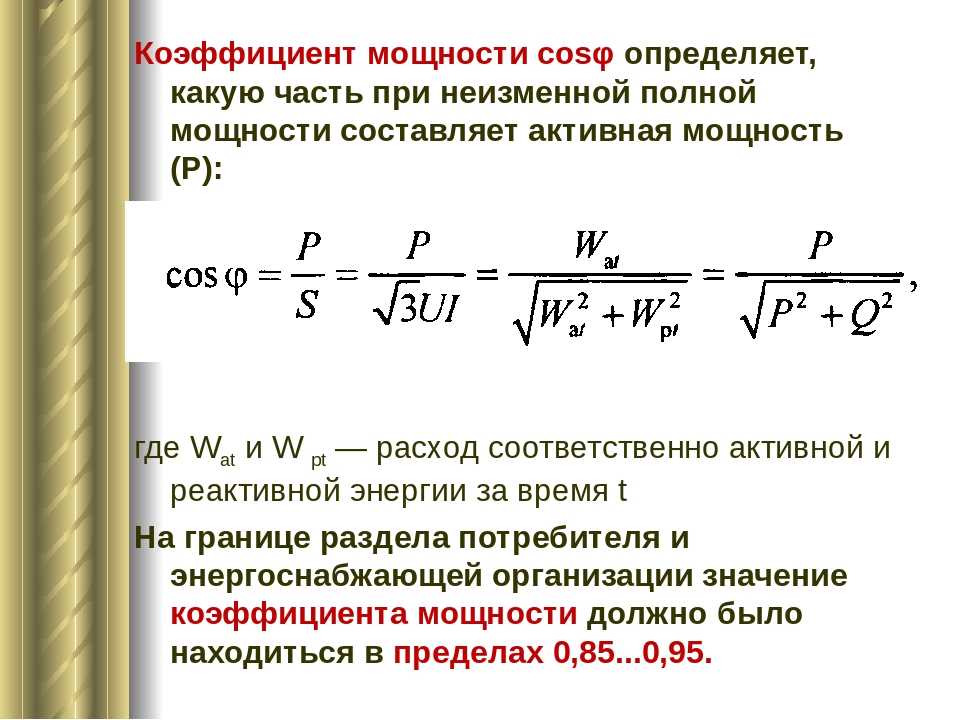 Затем это вращающееся магнитное поле (RMF) индуцирует противоположные магнитные поля в роторе — свободно движущемся якоре, прикрепленном к выходному валу, — и вызывает полезное вращение.
Затем это вращающееся магнитное поле (RMF) индуцирует противоположные магнитные поля в роторе — свободно движущемся якоре, прикрепленном к выходному валу, — и вызывает полезное вращение.
Эти двигатели также известны как асинхронные двигатели, поскольку частота их переменного тока напрямую не соответствует числу оборотов выходного вала. Это явление известно как «проскальзывание» и возникает из-за того, что ротор всегда играет в магнитную игру «догоняющего» с RMF. Существование скольжения означает, что точная синхронизация с асинхронными двигателями затруднена. Как было сказано ранее, эти двигатели можно найти в бытовой технике, электромобилях и даже в крупном механизированном промышленном оборудовании, поскольку они имеют сотни скоростей, крутящих моментов, напряжений, размеров и форм. Подробнее об этих машинах читайте в нашей статье все об асинхронных двигателях.
Синхронные двигатели
Синхронные двигатели включают в себя то, чего не могут сделать асинхронные двигатели, а именно их «асинхронный» характер. Синхронные двигатели согласовывают выходную частоту вращения с входной частотой переменного тока, что позволяет разработчикам использовать эти двигатели в точно синхронизированных приложениях, таких как часы, прокатные станы, проигрыватели и многое другое. Они достигают этого, связывая магнитные полюса (пары север-юг в каждом магнитном поле) статора и ротора, так что RMF статора будет вращать ротор с точной синхронной скоростью. Есть много способов блокировки этих полюсов, и в наших статьях о реактивных двигателях и бесщеточных двигателях постоянного тока приведены конкретные примеры этих механизмов. Обратите внимание, что бесщеточный двигатель постоянного тока не является двигателем переменного тока; это связано с тем, что синхронные конструкции по своей сути не должны питаться от сети переменного тока, тогда как асинхронные двигатели обычно всегда питаются от сети переменного тока.
Синхронные двигатели согласовывают выходную частоту вращения с входной частотой переменного тока, что позволяет разработчикам использовать эти двигатели в точно синхронизированных приложениях, таких как часы, прокатные станы, проигрыватели и многое другое. Они достигают этого, связывая магнитные полюса (пары север-юг в каждом магнитном поле) статора и ротора, так что RMF статора будет вращать ротор с точной синхронной скоростью. Есть много способов блокировки этих полюсов, и в наших статьях о реактивных двигателях и бесщеточных двигателях постоянного тока приведены конкретные примеры этих механизмов. Обратите внимание, что бесщеточный двигатель постоянного тока не является двигателем переменного тока; это связано с тем, что синхронные конструкции по своей сути не должны питаться от сети переменного тока, тогда как асинхронные двигатели обычно всегда питаются от сети переменного тока.
Синхронные двигатели по своей природе не являются самозапускающимися, то есть этим двигателям часто требуются пускатели для возбуждения их роторов до полной скорости. Эти пускатели не часто применяются с асинхронными двигателями, потому что они могут запускаться из состояния покоя без начального «толчка». Чтобы узнать больше, не стесняйтесь читать нашу статью о типах пускателей двигателей. Кроме того, несмотря на то, что их скорость является синхронной, скорость синхронных двигателей трудно изменить, и для этого требуется контроллер двигателя переменного тока, чтобы разработчики могли регулировать скорость двигателя (дополнительную информацию можно найти в нашей статье о контроллерах двигателей переменного тока). Синхронные двигатели, как правило, более дорогие, чем асинхронные двигатели, имеют более высокий КПД (>90%) и являются отличным выбором для дробилок, мельниц, измельчителей и других низкоскоростных мощных приложений.
Эти пускатели не часто применяются с асинхронными двигателями, потому что они могут запускаться из состояния покоя без начального «толчка». Чтобы узнать больше, не стесняйтесь читать нашу статью о типах пускателей двигателей. Кроме того, несмотря на то, что их скорость является синхронной, скорость синхронных двигателей трудно изменить, и для этого требуется контроллер двигателя переменного тока, чтобы разработчики могли регулировать скорость двигателя (дополнительную информацию можно найти в нашей статье о контроллерах двигателей переменного тока). Синхронные двигатели, как правило, более дорогие, чем асинхронные двигатели, имеют более высокий КПД (>90%) и являются отличным выбором для дробилок, мельниц, измельчителей и других низкоскоростных мощных приложений.
Сравнение асинхронных и синхронных двигателей
Поскольку эти два типа двигателей переменного тока все еще довольно широко распространены, в этой статье будет дано общее сравнение рабочих характеристик каждого типа, чтобы разработчики могли использовать эту информацию для дальнейшего определения машины, наиболее подходящей для их спецификаций. Ниже, в Таблице 1, показано качественное сравнение некоторых общих характеристик асинхронных и синхронных двигателей, а также визуализированы преимущества и недостатки каждой конструкции двигателя переменного тока.
Ниже, в Таблице 1, показано качественное сравнение некоторых общих характеристик асинхронных и синхронных двигателей, а также визуализированы преимущества и недостатки каждой конструкции двигателя переменного тока.
Таблица 1: Сравнение асинхронных и синхронных двигателей.
Характеристики | Асинхронные двигатели | Синхронные двигатели |
Сложность | Простой дизайн | Комплекс |
Самозапуск | Обычно да | Обычно нет |
Плотность мощности | В среднем | Высокий |
Эффективность | В среднем | Высокий |
Контроль коэффициента мощности | Нет (всегда с запаздыванием) | Да (может опережать и отставать) |
Стоимость | Низкий | Высокий |
Сложность (или ее отсутствие) асинхронных двигателей является их лучшим преимуществом перед синхронными конструкциями. Их очень просто производить, эксплуатировать и обслуживать, поэтому асинхронные двигатели в целом дешевле синхронных двигателей. И наоборот, реализация синхронной машины требует более сложного ротора, который труднее изготовить/ремонтировать, а также требует покупки и установки дополнительных цепей, чтобы эти двигатели могли работать эффективно.
Их очень просто производить, эксплуатировать и обслуживать, поэтому асинхронные двигатели в целом дешевле синхронных двигателей. И наоборот, реализация синхронной машины требует более сложного ротора, который труднее изготовить/ремонтировать, а также требует покупки и установки дополнительных цепей, чтобы эти двигатели могли работать эффективно.
Как указывалось ранее, асинхронные двигатели обычно запускаются самостоятельно, а синхронные двигатели — нет. Это означает, что для эффективной работы асинхронных двигателей требуется меньше внешних периферийных устройств, что снижает их стоимость и сложность.
Удельная мощность — это количество энергии (обычно измеряемой в лошадиных силах, л.с. или киловатт-кВт), вырабатываемой на единицу объема двигателя. Синхронные двигатели обычно имеют более высокую удельную мощность, чем асинхронные двигатели сопоставимого размера, что позволяет им обеспечивать большую мощность при меньшем объеме. Это отлично подходит для приложений с ограниченными размерами и является причиной выбора синхронного двигателя вместо асинхронного двигателя.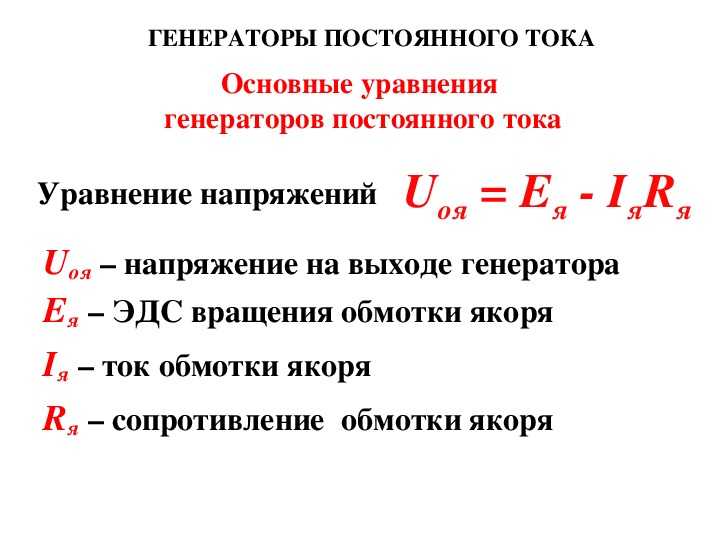
Синхронные двигатели в некоторых случаях могут достигать КПД >90% и, как правило, более энергоэффективны, чем асинхронные двигатели. КПД зависит от конкретного типа и размера двигателя, но отсутствие скольжения в синхронных двигателях означает меньше потерь энергии при преобразовании электрической энергии в механическую.
Коэффициент мощности представляет собой отношение рабочей мощности к полной мощности и выражается в процентах, чтобы показать эффективность распределения мощности и связанные с ней потери. Например: Фабрика должна работать на 1000 кВт (рабочая мощность), а электрический счетчик, подключенный к источнику питания, показывает 1250 кВА (полная мощность, которая имеет единицы киловольт-ампер, или кВА, и составляет используется для передачи энергии индуктивным нагрузкам, таким как катушки двигателей, провода и т. д.). Таким образом, коэффициент мощности для этой фабрики составляет 1000/1250 = 0,8 или 80 %, что означает, что только 80 % тока, подаваемого на фабрику, совершает полезную работу, а 20 % теряется из-за нагрева и других неэффективных действий.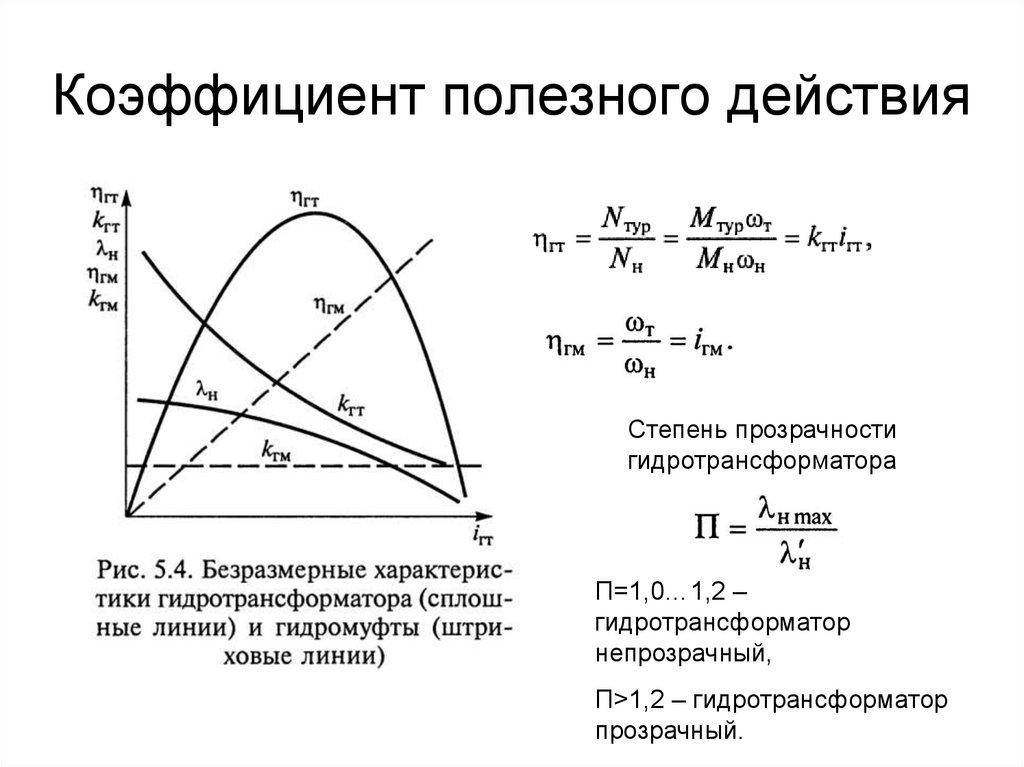 Инженеры могут помочь компенсировать эти потери, используя синхронные двигатели, чтобы «опережать» коэффициент мощности или генерировать энергию обратно в систему (помните, что двигатели также могут работать как электрические генераторы, если им дается входное вращение). Часто синхронные двигатели работают в паре с асинхронными двигателями для компенсации индуктивных потерь мощности асинхронного двигателя, что представляет собой еще одно огромное преимущество синхронных двигателей.
Инженеры могут помочь компенсировать эти потери, используя синхронные двигатели, чтобы «опережать» коэффициент мощности или генерировать энергию обратно в систему (помните, что двигатели также могут работать как электрические генераторы, если им дается входное вращение). Часто синхронные двигатели работают в паре с асинхронными двигателями для компенсации индуктивных потерь мощности асинхронного двигателя, что представляет собой еще одно огромное преимущество синхронных двигателей.
Наконец, общей чертой синхронных и асинхронных двигателей является их ценовое разделение. По ранее объясненным причинам синхронные двигатели дороже в производстве, реализации, обслуживании и ремонте, чем асинхронные двигатели. Однако можно сделать вывод, что их возможности энергосбережения и коррекции коэффициента мощности могут компенсировать их более высокие первоначальные затраты. Верно ли это или нет, в конечном итоге зависит от конкретных приложений, но это следует учитывать, поскольку общая стоимость жизненного цикла всегда должна быть минимизирована в любом проекте.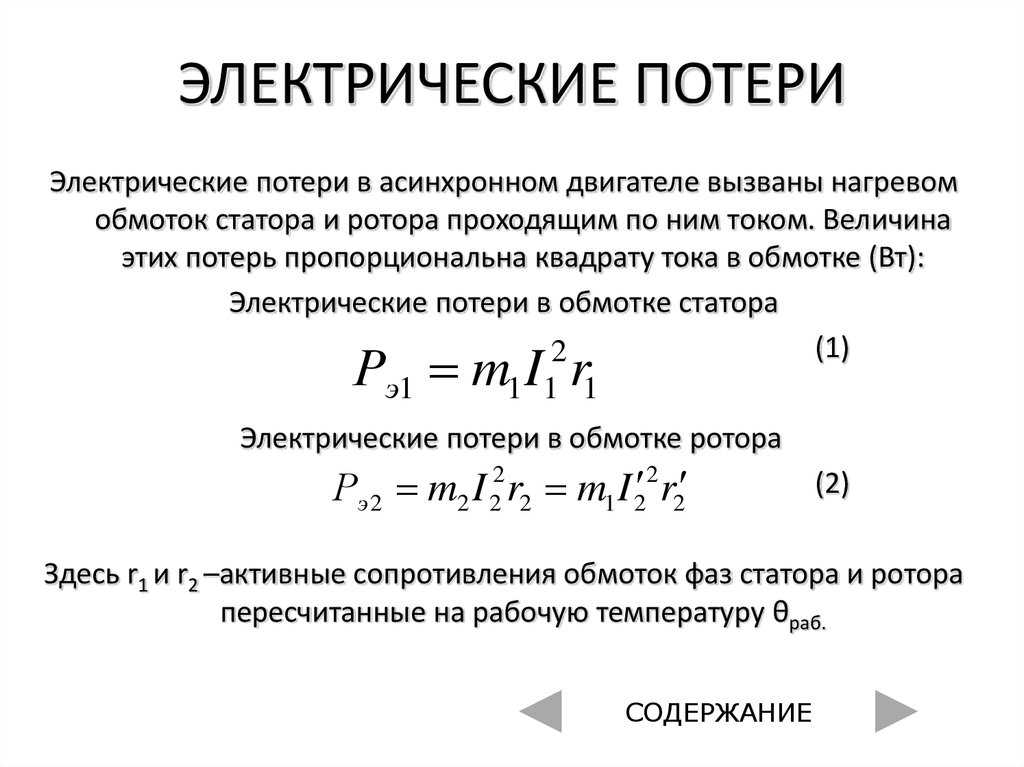
Резюме
В этой статье представлено краткое сравнение асинхронных двигателей переменного тока и синхронных двигателей. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://nit-edu.org/wp-content/uploads/2019/06/ch-38-Synchronous-motor.pdf
- http://www.egr.unlv.edu/~eebag/Synchronous%20Generator%20I.pdf
- http://hyperphysics.phy-astr.gsu.edu/hbase/magnet/indmot.html
- http://electricalacademia.com/induction-motor/torque-speed-characteristics-induction-motor/
Другие товары для двигателей
- Типы катушек индуктивности и сердечников
- Типы контроллеров двигателей и приводов
- Типы двигателей постоянного тока Двигатели переменного тока
- и двигатели постоянного тока — в чем разница?
- Все об асинхронных двигателях — что это такое и как они работают
- Типы двигателей переменного тока
- Все о синхронных двигателях — что это такое и как они работают
- Понимание двигателей Однофазные промышленные двигатели
- — как они работают?
- Что такое двигатель с короткозамкнутым ротором и как он работает?
- Что такое двигатель с фазным ротором и как он работает?
- Все о реактивных двигателях — что это такое и как они работают
- Все о бесщеточных двигателях постоянного тока — что это такое и как они работают
- Все о двигателях с постоянными магнитами — что это такое и как они работают
- Все о двигателях постоянного тока с обмоткой — что это такое и как они работают
- Все о шунтирующих двигателях постоянного тока — что это такое и как они работают
- Все о шаговых двигателях — что это такое и как они работают Шаговые двигатели
- и серводвигатели — в чем разница?
- Все о контроллерах двигателей переменного тока — что это такое и как они работают Бесщеточные двигатели
- и щеточные двигатели — в чем разница?
Больше из Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Потери в синхронном двигателе — Силовые каскады и КПД
Синхронный двигатель и генератор переменного тока (или синхронный генератор) — это одна и та же машина, за исключением того, что они имеют разные ступени потока мощности. Когда машина используется для получения выходной мощности переменного тока (путем преобразования входной механической мощности в выходную электрическую мощность), она называется генератором переменного тока или синхронным генератором. Когда одна и та же машина используется для получения механической энергии (путем преобразования входной электрической энергии в выходную механическую энергию), она называется синхронным двигателем. То же самое относится и к потерям в этих машинах, т. Е. Потери в синхронном двигателе и синхронном генераторе (генераторе переменного тока) почти одинаковы, если не считать ступени потока мощности.
Когда машина используется для получения выходной мощности переменного тока (путем преобразования входной механической мощности в выходную электрическую мощность), она называется генератором переменного тока или синхронным генератором. Когда одна и та же машина используется для получения механической энергии (путем преобразования входной электрической энергии в выходную механическую энергию), она называется синхронным двигателем. То же самое относится и к потерям в этих машинах, т. Е. Потери в синхронном двигателе и синхронном генераторе (генераторе переменного тока) почти одинаковы, если не считать ступени потока мощности.
Похожие сообщения:
- Синхронный двигатель: конструкция, работа, типы и применение
- Разница между синхронным и асинхронным двигателем
Содержание
Потери в синхронном двигателе Выходная механическая мощность двигателя всегда меньше входной электрической мощности. Энергия расходуется в различных частях машины в виде тепла. Это снижает КПД двигателя.
Энергия расходуется в различных частях машины в виде тепла. Это снижает КПД двигателя.
Потери в синхронном двигателе можно разделить на следующие категории
- Потери в меди
- Потери в железе и сердечнике
- Потери от вращения и трения
Потери в меди (также известные как электрические потери ) представляют собой потери, возникающие в медных обмотках из-за тока и сопротивления обмотки. Вот почему он также известен как I 2 Р потери. Если происходит как в статоре, так и в роторе синхронного двигателя.
Потери в статоре: Возникают из-за входного переменного тока и сопротивления обмотки статора в виде тепла.
P статор = (I статор ) 2 (R статор )
Потери ротора: потери ротора относительно меньше, чем потери статора из-за малого постоянного тока ротора, протекающего через обмотку возбуждения. Это определяется как
Это определяется как
P ротор = (I ротор ) 2 (R ротор )
Где
- P ротор0 = 1 дюйм ротора0 Потери мощности
- I ротор = постоянный ток ротора (обмотка возбуждения)
- R ротор = сопротивление ротора (обмотка возбуждения)
Потери щеток: Аналогично, потери щеток также считаются медными.
Related Posts:
- Потери в двигателе постоянного тока – силовые каскады и эффективность двигателя постоянного тока
- Потери в генераторе постоянного тока – силовые каскады и эффективность генератора постоянного тока
Потери в сердечнике или потери в сердечнике (также известные как магнитные потери) свойство материала. Эти потери подразделяются на два типа:
- Гистерезисные потери
- Потери на вихревые токи
Магнитные потери = P hys + P eddy
Гистерезисная потеря: возникает из-за намагничивания и размагничивания ферромагнитного сердечника из-за изменения магнитного поля. Ферромагнитный материал не имеет возможности внезапно изменить свою намагниченность. Во время перемагничивания он постепенно размагничивается, тогда как приложенное магнитное поле быстро меняет направление. Часть приложенной мощности используется для размагничивания сердечника. Это известно как потеря гистерезиса, определяемая
Ферромагнитный материал не имеет возможности внезапно изменить свою намагниченность. Во время перемагничивания он постепенно размагничивается, тогда как приложенное магнитное поле быстро меняет направление. Часть приложенной мощности используется для размагничивания сердечника. Это известно как потеря гистерезиса, определяемая
P hys = ηB max 1,6 fV
Где
- P hys = гистерезисные потери
- η = коэффициент гистерезиса
- B макс. = максимальная плотность потока
- f = Частота питания
- В = Объем магнитного материала
Потери на вихревые токи: Потери на вихревые токи возникают из-за тока, индуцируемого в сердечнике синхронного двигателя. Как мы знаем, переменное магнитное поле индуцирует ток в проводнике, а сердечник сделан из железа, которое является хорошим проводником. Индуцированный ток называется вихревым током, который циркулирует в сердечнике, таким образом теряя энергию в виде тепла, известного как потеря вихревого тока. Это дается
Это дается
P вихревые = k e B 2 f 2 t 2 В
Где
- P 8 вихревые потери 5
- 8 Eddy потери
- K e = коэффициент вихревых токов
- B макс. = максимальная плотность потока
- f = Частота питания
- t = Толщина ламинирования
- В = Объем магнитного материала
Потери на вихревые токи уменьшаются за счет ламинирования сердечника. Сердечник выполнен из тонких листов с ламинированием между ними для уменьшения наведенного (вихревого) тока.
Related Posts:
- Потери в асинхронном двигателе – Силовые каскады в асинхронных двигателях
- Потери в генераторе – силовые каскады и КПД синхронного генератора
Потери на вращение и трение (также известные как механические потери ) происходят между неподвижными и подвижными частями машины.
 Это постоянные потери, поскольку скорость вращения ротора в синхронном двигателе постоянна. В синхронном двигателе есть два типа механических потерь.
Это постоянные потери, поскольку скорость вращения ротора в синхронном двигателе постоянна. В синхронном двигателе есть два типа механических потерь.Потери на трение: В синхронном двигателе потери на трение происходят в подшипниках из-за трения между вращающейся частью и неподвижным телом. Он определяется как
P трение = k N
Где «k» — константа, а «N» — скорость в об/мин.
Потери на ветер: воздуха. Он определяется как
P парусность = k N 3
Потери на парусность увеличиваются с кубом скорости, а также зависят от конструкции ротора. Ротор с явно выраженными полюсами имеет более высокие потери на ветер из-за выступающих полюсов. Поэтому скорость учитывается при проектировании ротора.
Случайные потериРазница между общими потерями и фактическими потерями называется случайными потерями. Это различные небольшие потери, которые возникают в синхронном двигателе по разным причинам, но их трудно учесть, например, искажение потока, неравномерное распределение тока в якоре и т.
 д. Принимается за 1% или 0,01 от общего потери.
д. Принимается за 1% или 0,01 от общего потери.P рассеянный = 1% P общие_потери = 0,01 x P общие_потери
Похожие сообщения:
- Потери в электрических машинах – формулы и уравнения
- Потери в трансформаторе – различные типы потерь в трансформаторе
В синхронном двигателе имеются различные ступени мощности, где мощность на каждой ступени уменьшается из-за потерь, как показано на диаграмме.
Входная электрическая мощность P в подается на синхронный двигатель, выходная механическая мощность P из представляет собой фактическую мощность, выдаваемую синхронным двигателем. Электрические и механические потери тратят энергию впустую и уменьшают фактическую мощность, выдаваемую двигателем.
Давайте посмотрим на векторную диаграмму, чтобы лучше понять ее.
 Ниже приведена векторная диаграмма синхронного двигателя.
Ниже приведена векторная диаграмма синхронного двигателя.Где
- В = напряжение питания на фазу
- I a = ток якоря на фазу
- R a = сопротивление якоря на фазу
- E b = противоэдс
- E r = результирующее напряжение, В – E b
- Z s = синхронное полное сопротивление
- θ = внутренний угол, между I a и E r
- α = Угол нагрузки
- φ = угол коэффициента мощности
Потребляемая мощность по фазам определяется как
P ph = VI a cosφ
Полная 3-фазная входная мощность синхронного двигателя, соединенного звездой 9003, определяется как P в = √3 V L I L COS φ
P в = 3 V PH I PH COS φ
, где
- 6681 VH
, где
- 66681.
- I L = Линейный ток
- В ф. = Фазное напряжение
- I ph = фазный ток
Полная механическая мощность Pm — это мощность, вырабатываемая ротором. Он рассчитывается путем вычитания потерь в обмотках статора из входной мощности, как указано ниже.
P статор = 3 I a 2 R a
Где «Ia» и «Ra» — ток и сопротивление якоря.
P M = P в — P Статор
P M = √3 I L V L COS φ — 3 I A L COS φ φ — 3 I A L COS φ — 3 I A L COS φ — 3 I A L . Или
P м = противоЭДС x ток якоря x косинус угла между ними = E b I a cos(α + φ) для ведущих p.f
Выходная механическая мощностьВыходная мощность — это фактическая механическая мощность, передаваемая на вал и, в конечном счете, на нагрузку.
 Он рассчитывается путем вычитания магнитных, механических и паразитных потерь из механической мощности, например
Он рассчитывается путем вычитания магнитных, механических и паразитных потерь из механической мощности, напримерP out = P м – P магнитного -P механического
такое КПД двигателя и как его улучшить?
- Эффективность трансформатора, эффективность в течение всего дня и условия для максимальной эффективности
КПД синхронного двигателя представляет собой отношение выходной механической мощности P или t к входной электрической мощности P в . Он определяется как
Эффективность, η = P из / P в
Эффективность, η = (P в – P потери ) / P в
% КПД, η = (P в – P потери ) / P в x 100%
КПД синхронного двигателя зависит от потерь. Поскольку скорость постоянна, то и магнитные потери постоянны.
