Что представляют собой стабилизаторы напряжения КРЕН. Какие бывают типы стабилизаторов КРЕН. Каковы основные характеристики стабилизаторов КРЕН. Где применяются стабилизаторы напряжения КРЕН. Как правильно выбрать и использовать стабилизатор КРЕН.
Что такое стабилизаторы напряжения КРЕН
Стабилизаторы напряжения КРЕН представляют собой интегральные микросхемы, предназначенные для стабилизации напряжения в электронных устройствах. Аббревиатура КРЕН расшифровывается как «Компенсационный Регулятор Напряжения».
Основные особенности стабилизаторов КРЕН:
- Обеспечивают стабильное выходное напряжение при колебаниях входного напряжения и тока нагрузки
- Имеют встроенную защиту от короткого замыкания и перегрева
- Выпускаются в различных корпусах для монтажа в отверстия и поверхностного монтажа
- Доступны модели с фиксированным и регулируемым выходным напряжением
- Не требуют большого количества внешних компонентов
Стабилизаторы КРЕН широко применяются в бытовой и промышленной электронике для питания различных устройств стабильным напряжением.
Основные типы стабилизаторов КРЕН
Существует несколько основных типов стабилизаторов напряжения КРЕН:
1. Стабилизаторы с фиксированным выходным напряжением
Обеспечивают на выходе фиксированное стабилизированное напряжение. Наиболее распространенные модели:
- КР142ЕН5 — выходное напряжение 5 В
- КР142ЕН8 — выходное напряжение 8 В
- КР142ЕН12 — выходное напряжение 12 В
- КР142ЕН15 — выходное напряжение 15 В
2. Стабилизаторы с регулируемым выходным напряжением
Позволяют регулировать выходное напряжение в определенном диапазоне с помощью внешних элементов. Популярные модели:
- КР142ЕН1 — диапазон выходных напряжений 1,2-37 В
- КР142ЕН12А — диапазон выходных напряжений 1,2-32 В
- КР142ЕН19 — диапазон выходных напряжений 1,25-35 В
3. Стабилизаторы с малым падением напряжения (LDO)
Имеют низкое минимальное падение напряжения между входом и выходом. Например:
- КР1157ЕН501 — падение напряжения до 0,2 В
- КР1158ЕН5.0 — падение напряжения до 0,4 В
Ключевые характеристики стабилизаторов КРЕН
При выборе стабилизатора КРЕН следует учитывать следующие основные характеристики:
Выходное напряжение
Определяет номинальное напряжение на выходе стабилизатора. Для фиксированных стабилизаторов это конкретное значение (5 В, 12 В и т.д.), для регулируемых — диапазон возможных напряжений.
Максимальный выходной ток
Показывает максимальный ток, который способен обеспечить стабилизатор на выходе. Обычно находится в диапазоне от 100 мА до 3 А для разных моделей.
Минимальное падение напряжения
Минимальная разница между входным и выходным напряжением, необходимая для нормальной работы стабилизатора. Для обычных линейных стабилизаторов составляет 2-3 В, для LDO-стабилизаторов может быть менее 0,5 В.
Точность стабилизации
Характеризует отклонение выходного напряжения от номинального значения. Обычно составляет ±2-5% для большинства моделей.
Области применения стабилизаторов КРЕН
Стабилизаторы напряжения КРЕН находят широкое применение в различных областях электроники:
Бытовая техника
Используются в блоках питания телевизоров, аудио- и видеотехники, бытовых приборов для обеспечения стабильного питания электронных схем.

Компьютерная техника
Применяются в материнских платах, видеокартах, жестких дисках и других компонентах для стабилизации питающих напряжений.
Автомобильная электроника
Используются в автомобильных магнитолах, навигаторах, видеорегистраторах для защиты от перепадов напряжения бортовой сети.
Промышленная автоматика
Применяются в датчиках, контроллерах, источниках питания промышленного оборудования для обеспечения стабильной работы.
Как правильно выбрать стабилизатор КРЕН
При выборе стабилизатора напряжения КРЕН следует учитывать несколько ключевых факторов:
1. Требуемое выходное напряжение
Определите, какое напряжение необходимо для питания вашего устройства. Выберите модель с фиксированным напряжением или регулируемую в зависимости от потребностей.
2. Максимальный ток нагрузки
Рассчитайте максимальный ток, потребляемый вашим устройством. Выберите стабилизатор с запасом по току 20-30% от расчетного значения.
3. Входное напряжение
Учтите диапазон входных напряжений, в котором будет работать стабилизатор. Убедитесь, что выбранная модель способна работать при минимальном и максимальном значениях входного напряжения.

4. Тепловой режим
Оцените условия охлаждения стабилизатора в вашем устройстве. При необходимости выберите модель с возможностью установки радиатора или с низким тепловыделением.
Особенности монтажа стабилизаторов КРЕН
При монтаже стабилизаторов напряжения КРЕН следует соблюдать некоторые правила для обеспечения их надежной работы:
1. Установка входных и выходных конденсаторов
Для улучшения стабильности работы рекомендуется устанавливать керамические или электролитические конденсаторы на входе и выходе стабилизатора. Типовые значения: 0,1-1 мкФ на входе и 1-10 мкФ на выходе.
2. Обеспечение теплоотвода
При работе с большими токами нагрузки необходимо обеспечить эффективный отвод тепла от корпуса стабилизатора. Для этого используются радиаторы, которые крепятся к корпусу микросхемы с помощью теплопроводящей пасты.
3. Правильная разводка печатной платы
Для минимизации помех и улучшения стабильности работы следует соблюдать следующие правила разводки:
- Размещать входные и выходные конденсаторы как можно ближе к выводам стабилизатора
- Использовать широкие дорожки для силовых цепей
- Применять отдельные «земляные» полигоны для входных и выходных цепей
Преимущества и недостатки стабилизаторов КРЕН
Стабилизаторы напряжения КРЕН имеют ряд преимуществ и недостатков по сравнению с другими типами стабилизаторов:

Преимущества:
- Простота применения — требуют минимум внешних компонентов
- Низкая стоимость
- Хорошая помехозащищенность
- Встроенная защита от перегрузки и короткого замыкания
- Широкий выбор моделей с различными параметрами
Недостатки:
- Относительно низкий КПД (особенно при большой разнице между входным и выходным напряжением)
- Значительное тепловыделение при больших токах нагрузки
- Необходимость в достаточно большом перепаде напряжений между входом и выходом (кроме LDO-моделей)
Альтернативы стабилизаторам КРЕН
Помимо линейных стабилизаторов КРЕН существуют и другие типы стабилизаторов напряжения, которые могут быть более эффективными в определенных применениях:
1. Импульсные стабилизаторы
Обеспечивают более высокий КПД, особенно при большой разнице между входным и выходным напряжением. Однако они сложнее в реализации и могут создавать высокочастотные помехи.
2. Параметрические стабилизаторы

3. Компенсационные стабилизаторы
Обеспечивают высокую точность стабилизации, но требуют большего количества компонентов и сложнее в настройке.
Выбор типа стабилизатора зависит от конкретных требований к устройству, включая необходимую точность стабилизации, допустимое тепловыделение, стоимость и сложность реализации.
Стабилизаторы КРЕН 142
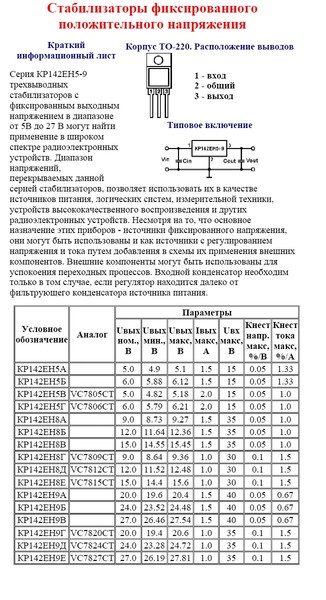
Стабилизаторы КРЕН серии КР142ЕН5-9 с постоянным положительным напряжением на выходе в диапазоне 5-27В широко применяются в самых различных электронных устройствах. Те напряжения, которые можно получить применяя данные стабилизаторы КРЕН 142, позволяют использовать их в блоках питания бытовой радиоэлектроники, промышленных устройств, измерительной техники и т.д.
Схема КРЕН 142
Типовая схема КРЕН 142 стабилизатора, а также цоколевка КРЕН показаны на рисунках.
Стабилизаторы КРЕН (с фиксированным напряжением)
| Условное обозначение | Аналог | Параметры | ||||||
|---|---|---|---|---|---|---|---|---|
| Uвых. ном. В | Uвых. мин. В | Uвых. макс. В | Iвых. макс. А | Uвх. макс. В | Кнест. напр. макс. %/В | Кнест. тока макс. %/А |
||
| КР142ЕН5А | 7805 | 5.0 | 4.9 | 5.1 | 2.0 | 15 | 0.05 | 1.33 |
| КР142ЕН5Б | 6.0 | 5.88 | 6.12 | 2.0 | 15 | 0.05 | 1.33 | |
| КР142ЕН5В | 5.0 | 4.82 | 5.18 | 1.5 | 15 | 0.05 | 1.33 | |
| КР142ЕН5Г | 7806 | 6.0 | 5.79 | 6.21 | 1.5 | 15 | 0.05 | 1.33 |
| КР142ЕН8А | 9.0 | 8.73 | 9.27 | 1.5 | 35 | 0.05 | 1.0 | |
| КР142ЕН8Б | 12.0 | 11.64 | 12.36 | 1.5 | 35 | 0.05 | 1.0 | |
| КР142ЕН8В | 15.0 | 14.55 | 15.45 | 1.5 | 35 | 0.05 | 1.0 | |
| КР142ЕН8Г | 7809 | 9.0 | 8.64 | 9.36 | 1.0 | 0.1 | 1.5 | |
| КР142ЕН8Д | 7812 | 12.0 | 11.52 | 12.48 | 1.0 | 30 | 0.1 | 1.5 |
| КР142ЕН8Е | 7815 | 15.0 | 14.4 | 15.6 | 1.0 | 30 | 0.1 | 1.5 |
| КР142ЕН9А | 20.0 | 19.6 | 20.4 | 1.5 | 40 | 0.05 | 0.67 | |
| КР142ЕН9Б | 24.0 | 23.52 | 24.48 | 1.5 | 40 | 0.05 | 0.67 | |
| КР142ЕН9В | 27.0 | 26.46 | 27.54 | 1.5 | 40 | 0.05 | 0.67 | |
| КР142ЕН9Г | 7820 | 20.0 | 19.4 | 20.6 | 1.0 | 35 | 0.1 | 1.5 |
| КР142ЕН9Д | 7824 | 24.0 | 23.28 | 24.72 | 1.0 | 35 | 0.1 | 1.5 |
| КР142ЕН9Е | 7827 | 27.0 | 26.19 | 27.81 | 1.0 | 35 | 0.1 | 1.5 |
| КР142ЕН9К | 7827 | 27.0 | — | — | 1.5 | 40 | — | — |
Сверх-компактная распайка обвязки стабилизатора «КРЕН»
Возникла необходимость в источнике постоянного фиксированного 9-вольтового напряжения (для питания мультиметра и транзистор-тестера), а адаптеры в наличии все сплошь 12-ти 5-ти-вольтовые. Что делать? Старинная многажды проверенная технология — использовать линейный стабилизатор напряжения типа «крен» (LM317, LM7805 и т. д.) в качестве переходника-адаптера с 12В на нужное более низкое напряжение. Почему-то LM7809 (с фиксированным выходным напряжением 9 вольт) тоже не нашлось… Зато нашлась куча КР142ЕН12А (в простонародье КРЕН12), которые регулируемые и на выходе резисторами обвязки можно задать любое напряжение (на 1.3В меньше входного, не менее 1.25В). Кроме того, нашёлся вот такой странный адаптер:
Фото 1. Адаптер питания с AC 9V на выходе. Внутри просто проволочный трансформатор
На выходе даёт переменные (AC) 9В. Внутри просто проволочный трансформатор, который довольно плотно занимает всё внутреннее пространство.
Фото 2. В коробочку с трансформатором может влезь несколько деталей
Идея запихнуть туда выпрямитель (диодный мост + большой ёмкости электролитический конденсатор), который создаст постоянное напряжение +12.7В (в реальности оказалось 13.2) и «кренку» для понижения и стабилизации напряжения обратно до 9В, но уже DC.
Диодный мост W04G (на 400В, 1.5А), как видим, современный, довольно таки мелок. Конденсатор тоже можно подобрать достаточно мелким. А вот КРЕН12 (= LM317) сама довольно большая, плюс ей нужен радиатор (в идеале, в пределе 100 см2 — рассеит 10Вт; без радиатора рассеиваемая мощность этой микросхемы 1Вт), плюс ей нужна обвязка из двух резисторов и двух конденсаторов. Т. е. нужно всё как-то миниатюризировать.
Вот как я сделал:
Фото 3. Обвязка КРЕ12. Схема с LM317
Припаиваем чип-детали прямо на ноги микросхемы, «навесным» монтажом. Резистор R1 на 240 Ом между первым и вторым выводами. Потом стоймя припаиваем одинакового размера резистор R2 (на 1.5 кОм для организации на выходе 9В) на 1-й вывод, и конденсаторы по 1 мкФ на 2-й и 3-й. На эти три торчка сверху припаиваем провод — это будет «общий», «минус» провод. Всё, вся схема реализована.
Тут надо отметить, что у старых (советских) КРЕН12 выход был на 3-ей ноге, а вход на 2-ой, так что если будете ориентироваться на старые (сканированные) даташиты на неё [типа этого], то у вас в руках должен быть именно советский вариант микросхемы. На фото выше — современная [даташит], и цоколёвка у неё в точности как у LM317T (и во всём остальном она теперь точная копия LM317T).
В макро:
Фото 4. КРЕН12А и 4 чип-детали на ней
Упаковываем в коробочку:
Фото 5. Все 3 детали уместились в свободном пространстве коробки адаптера
Провод на выход припаян так, чтобы его витки оказались между оголёнными контактами трансформатора и диодного моста, и кренкой, чтобы эффективно разделить их без дополнительной изоляции.
В верхней половинке коробки детали разместились на пределе:
Фото 6. Упаковано. Компактно. Влезло
Вот и всё, готов адаптер для питания
Фото 7. Мультиметр и транзистор-тестер, которым нужны 9 вольт питания
мультиметра Mastech MS8222H, которому я уже запарился менять батарейки, и новоприобретённого транзистор-тестера GM328A.
Еще возник интерес протестировать полученный адаптер питания на выдерживание нагрузки, результаты такие:
- Без нагрузки напряжение на выходе 9.25В.
- Нагрузка 13.6 Ом: напряжение просаживается до 6.9В, ток 0.51А. КРЕН-ка с радиатором (пластмассовый корпус адаптера открыт) нагревается до 63ºС.
- Нагрузка 22 Ом: напряжение 7.9В, ток 0.36А.
- Нагрузка 51 Ом: напряжение 9.0В, ток 0.18А
Выводы:
- Этот стабилизатор особо-то и не стабилизирует напряжение, в отличие от современных импульсных вариантов. Жуткая просадка под нагрузкой.
- Из-за ужасно низкого КПД (процентов 50, наверное, в данном случае) из исходной заявленной мощности 9Vx0.8А остаётся… жалких 0.2А, если важны 9 вольт. Хотя, конечно, да запитывания мультиметров больше и не надо.
- Под хорошей нагрузкой сильно греется. Вообще говоря, нужен такой радиатор:
Фото 8. Адаптер питания с регулируемым выходным напряжением на КРЕН12А
Это мой первый (и последний за особой ненадобностью) самодельный регулируемый (от 1.25 до 33 вольт) БП, сделанный 15 лет назад. Благодаря этому радиатору (от транзистора П203Б), который, к тому же, снаружи корпуса (внутри которого проволочный трансформатор, который на выходе выпрямителя выдаёт 35.4 вольта), КРЕН-ка тут ни разу не сгорела, не отключалась, вообще легко переносит любые нагрузки сколь угодно долго. Но радиатор и здесь иногда греется весьма сильно, особенно когда мотор заклинивает.
Как узнать, что пора менять стойки стабилизатора
Теория крена
Задача стоек стабилизатора – держать сам стабилизатор. Поэтому начнём с него.
Логично, что в повороте машина вынуждена крениться (центр тяжести у неё расположен всё-таки не в точке контакта колёс с дорогой, а значительно выше, так что от центробежной силы никуда не деться). Сам по себе крен – штука не самая приятная. И не из-за того, что в салоне качающейся машины всех быстро начнёт тошнить, а из-за того, что во время крена сильно изменяется нагрузка на внутренние и наружные по отношению к центру поворота колёса. А это влияет не столько на комфорт, сколько на управляемость. Стабилизатор поперечной устойчивости должен эту проблему решать.
Особенно актуально это для самой распространённой передней подвески типа МакФерсон. Теоретически углы развала колёс у неё постоянные, но как раз в крене, при большой разнице нагрузки на колёса, угол развала меняется. Вроде бы ничего с этим сделать нельзя – такая особенность конструкции, но стабилизатор всё-таки делает. Если возникает крен, противоположные концы стабилизатора начинают перемещаться в противоположных же направлениях. В средней части возникает момент, который препятствует относительному перемещению колёс. В итоге не только перестаёт расти крен, но и более равномерно распределяется нагрузка на внутреннее и внешнее колесо. Так что стабилизатор полностью соответствует понятию гениальности: очень простая, но эффективная железка. Конечно, бывают и сложные стабилизаторы, жёсткость которых регулируется автоматически или по команде ЭБУ, но это другая история. Сегодня речь идёт об обычных «стабах».
Стойки стабилизатора – это детали, которые крепят его к кузову. Конечно, приварить его было бы проще, но стабилизатор не может быть неподвижным. Его задача – шевелить концами для создания вращающего момента, который прижимал бы отрывающееся колесо обратно к дороге. Поэтому сам он стоит во втулках (чтобы немного вращаться), а его стойки имеют подвижные соединения. Иначе они бы просто отломились, а сама конструкция не смогла бы работать. Соединения бывают разными: с шаровыми шарнирами или со втулками. С одного конца у них может быть резьба, но с другого обязательно будет что-то подвижное. Наиболее распространённое крепление – шаровое соединение. Штука очень подходящая по своим возможностям, но, к сожалению, не вечная. Особенно в случае со стойкой, которая постоянно испытывает переменные нагрузки. Со временем шаровое соединение начинает люфтить, скрипеть и стучать. И это неизбежно.
Смазка, пыльник, но не ШРУС
Понятно, что именно это соединение и становится со временем причиной появления непотребных звуков. А конструкция здесь абсолютно типичная для многих других автомобильных шаровых соединений: стальной шаровый палец стоит в пластиковом посадочном месте, всё это обмазано смазкой и закрыто пыльником. Ничего нового. Нечто подобное есть и в наконечниках рулевых тяг, и в ШРУСах (кроме самого пальца), и во многих других местах. Основное преимущество такого соединения – дешевизна конструкции.
Почему стойка разваливается? Первая причина, конечно, обусловлена особенностью работы стойки. Стабилизатор её постоянно пытается то сжать, то растянуть. И при этом немного проворачивает. Само собой, во временем пластик стачивается, и шаровая начинает скрипеть (как, например, и шаровая опора колеса – тут тоже много общего).
Вторая причина – это естественное старение смазки. Тут объяснять нечего.
Третья – это порванный пыльник. Смазка из соединения вымывается, зато вместо неё туда попадают пыль, песок и вся остальная дорожная грязь.
Четвёртая причина – это наши дороги, помноженные на особенность управления автомобилем некоторыми личностями. Нет в ходовой части машины такой детали, которая относилась бы благосклонно к ямам и ухабам. И стойка стабилизатора – не исключение. Интересно, что часто мы их убиваем специально. Например, когда переезжаем рельсы или лежачие полицейские под углом. Это, конечно, бережёт другие детали, более дорогие, но заметно снижает ресурс стоек стабилизатора. Потому что они изнашиваются сильнее всего именно при диагональной нагрузке, которую пытаются всеми силами компенсировать. Кстати, именно поэтому на некоторых серьёзных внедорожниках стабилизатор можно отключать: это позволяет увеличить ходы подвески, ограниченные именно этим стабилизатором.
Разумеется, к этой же опере относится и скоростное прохождение поворотов. С одной стороны, стабилизатор со стойками для этого нужен, с другой, нагрузка при таком манёвре максимальная. С этим надо просто смириться.
Что и как?
Каждый владелец, который проехал на своей машине достаточно много, знает, как распознать износ стоек стабилизатора. Они издают такие неповторимые звуки, что перепутать их с чем-то другим очень сложно. А вот если пришлось сесть в незнакомую машину (например, после покупки на вторичном рынке), можно немного растеряться. Поэтому напомню, как понять, что стойки придётся менять.
Скажу сразу: определить износ стойки по поведению машины достаточно сложно. Часто говорят о том, что машина начинает сильнее крениться в поворотах, становится хуже управляемость, на трассе машина начинает рыскать. По-моему, это всё не так однозначно и может быть последствием очень разнообразных поломок, так что полагаться на эти признаки я бы не стал. Тем более что есть более однозначные – звуки.
Сильнее всего стойки стабилизатора реагируют на поперечные нагрузки (стабилизатор не зря называется стабилизатором поперечной устойчивости). Чаще всего они начинают скрипеть и стучать при попытке диагонального вывешивания. Если в машине ничего не стучит, но при медленном проезде глубоких ям слышен скрип или даже стук – это стойки стаба. Звук бывает довольно громким, но глухим. Его локализация изнутри салона часто затруднительна, но если покачать машину, источник выдаст себя скрипом в районе колеса. Похожим образом может скрипеть и шаровая опора, но обычно она ведёт себя тише (если ещё не совсем раздолбана).
Хороший способ убедиться в том, что источник звука определён верно – это не торопясь дважды проехать через «лежачего полицейского». Сначала это надо сделать строго перпендикулярно, потом – под углом. Если в первом случае ходовая молчала, а во втором заскрипела – это точно стойки стабилизатора.
Если рядом есть верный товарищ, можно пойти другим путём: вывернуть колеса в сторону и взяться за стойку рукой. Товарищ (не только верный, но и сильный) должен машину покачать. Чувствуете люфт – меняете стойки. Исправные стойки люфтить не должны.
Другой хороший способ поможет, если слышен только скрип. Можно попробовать брызнуть на шаровое соединение «вэдэшкой». Если звук после этой операции пропадёт или станет тише, то это опять-таки стойка. Кстати, звук может пропасть и на неделю, так что если он бесит, но менять стойки пока некогда, можно протянуть некоторые время на «вэдэшке».
Большого повода бояться стуков стоек нет. Машина может ездить вообще без них (и без самого стабилизатора тоже). Хуже, конечно, но может. Ломаются окончательно стойки тоже редко. Чаще они ломаются в самом тонком и, соответственно, слабом месте стержня стойки. Но и это тоже нестрашно, хотя стук будет сводить с ума. Кстати, сам стабилизатор тоже может сломаться. Но такое бывает у совсем старых машин, где в силу возраста стабилизатор просто сгнивает.
Жаль, но срок службы стоек действительно ограничен. Где-то они служат вообще по 20-30 тысяч километров, где-то могут прослужить и сто. В любом случае при первых звуках, которые начнут раздаваться из-под днища новой машины, первым делом нужно проверить именно стойки – деталь с наименьшим ресурсом.
Ну и последнее: стойка стабилизатора – не та деталь, которую можно ставить только оригинальной. Обычно есть большой выбор аналогов, которые ничем не уступают оригиналу, но стоят намного дешевле. И это прекрасно.
Опрос
Изнашивались когда-нибудь стойки стабилизатора?
Всего голосов:
Стабилизатор напряжения и стабилизатор тока
В обсуждениях электрических схем часто встречаются термины «стабилизатор напряжения» и «стабилизатор тока». Но какая между ними разница? Как работают эти стабилизаторы? В какой схеме нужен дорогой стабилизатор напряжения, а где достаточно простого регулятора? Ответы на данные вопросы вы найдёте в этой статье.Рассмотрим стабилизатор напряжения на примере устройства LM7805.В его характеристиках указано: 5В 1,5А. Это значит стабилизирует он именно напряжение и именно до 5В. 1,5А — это максимальный ток, который может проводить стабилизатор. Пиковая сила тока. То есть от может отдать и 3 миллиампера, и 0,5 ампер, и 1 ампер. Столько, сколько тока требует нагрузка. Но не больше полутора. Это главное отличие стабилизатора напряжения от стабилизатора тока.
Виды стабилизаторов напряжения
Различают всего 2 основных типа стабилизаторов напряжения:
- линейные
- импульсные
Линейные стабилизаторы напряжения
Например, микросхемы КРЕН или LM7805, LM1117, LM350.
Кстати, КРЕН — это не аббревиатура, как многие думают. Это сокращение. Советская микросхема-стабилизатор, аналогичная LM7805 имела обозначение КР142ЕН5А. Ну а ещё есть КР1157ЕН12В, КР1157ЕН502, КР1157ЕН24А и куча других. Для краткости всё семейство микросхем стали называть «КРЕН». КР142ЕН5А тогда превращается в КРЕН142.
Советский стабилизатор КР142ЕН5А. Аналог LM7805.
Стабилизатор LM7805
Наиболее распространенный вид. Недостаток их в том, что они не могут работать на напряжении ниже, чем заявленное выходное напряжение. Если LM7805 стабилизирует напряжение на 5 вольтах, то на вход ему подать нужно как минимум на полтора вольта больше. Если подать меньше 6,5 В, то выходное напряжение «просядет», и мы уже не получим 5 В. Еще один минус линейных стабилизаторов — сильный нагрев при нагрузке. Собственно, в этом и заключается принцип их работы — всё, что выше стабилизируемого напряжения, просто превращается в тепло. Если мы на вход LM7805 подадим 12 В, то 7 потратятся на нагрев корпуса, а 5 пойдут потребителю. Корпус при этом нагреется настолько сильно, что без радиатора микросхема просто сгорит. Из всего этого вытекает ещё один серьёзный недостаток — линейный стабилизатор не стоит применять в устройствах с питанием от батареек. Энергия батареек будет тратиться на нагрев стабилизатора. Всех этих недостатков лишены импульсные стабилизаторы.
Импульсные стабилизаторы напряжения
Импульсные стабилизаторы — лишены недостатков линейных, но и стоят дороже. Это уже не просто микросхема с тремя выводами. Выглядят они, как плата с детальками.
Один из вариантов исполнения импульсного стабилизатора.
Импульсные стабилизаторы бывают трех видов: понижающие, повышающие и всеядные. Наиболее интересные — всеядные. Независимо от напряжения на входе, на выходе будет именно то, которое нам нужно. Всеядному импульснику все равно, что на входе напряжение ниже или выше нужного. Он сам автоматом переключается в режим повышения или понижения напряжения и держит заданное на выходе. Если в характеристиках заявлено, что стабилизатору на вход можно подать от 1 до 15 вольт и на выходе будет стабильно 5, то так оно и будет. Кроме того, нагрев импульсных стабилизаторов настолько незначителен, что в большинстве случаев им можно пренебречь. Если ваша схема будет питаться от батареек или размещаться в закрытом корпусе, где сильный нагрев линейного стабилизатора недопустим — ставьте импульсный. Я использую настраиваемые импульсные стабилизаторы напряжения за копейки, которые заказываю с Aliexpress. Купить можно здесь.
Хорошо. А что со стабилизатором тока?
Не открою Америку, если скажу, что стабилизатор тока стабилизирует ток.
Токовые стабилизаторы ещё иногда называют светодиодным драйвером. Внешне они похожи на импульсные стабилизаторы напряжения. Хотя сам стабилизатор — маленькая микросхема, а всё остальное нужно для обеспечения правильного режима работы. Но обычно драйвером называют всю схему сразу.
Примерно так выглядит стабилизатор тока. Красным кружком обведена та самая схема, которая и является стабилизатором. Всё остальное на плате — обвязка.
Итак. Драйвер задаёт ток. Стабильно! Если написано, что на выходе будет ток в 350мА, то будет именно 350мА. А вот напряжение на выходе может меняется в зависимости от требуемого потребителем напряжения. Не будем пускаться в дебри теории о том. как всё это работает. Просто запомним, что вы напряжение не регулируете, драйвер сделает все за вас исходя из потребителя.
Ну так и зачем всё это нужно то?
Теперь вы знаете, чем стабилизатор напряжения отличается от стабилизатора тока и можете ориентироваться в их многообразии. Возможно, вам так и не стало понятно, зачем эти штуки нужны.
Пример: вы хотите запитать 3 светодиода от бортовой сети автомобиля. Как вы можете узнать из статьи о светодиоде, для светодиода важно контролировать именно силу тока. Используем самый распространенный вариант соединения светодиодов: последовательно соединены 3 светодиода и резистор. Напряжение питания — 12 вольт.
Резистором мы ограничиваем ток на светодиоды, чтобы они не сгорели. Падение напряжения на светодиоде пусть будет у нас 3.4 вольта.
После первого светодиода остается 12-3.4= 8.6 вольт.
Нам пока хватает.
На втором потеряется еще 3.4 вольта, то есть останется 8.6-3.4=5.2 вольта.
И для третьего светодиода тоже хватит.
А после третьего останется 5.2-3.4=1.8 вольта.
При желании добавить четвёртый светодиод — уже не хватит.
Если напряжение питания поднять до 15В, то тогда хватит. Но тогда и резистор тоже надо будет пересчитать. Резистор — простейший стабилизатор (ограничитель) тока. Их часто ставят на те же ленты и модули. У него есть минус — чем ниже напряжение, тем меньше будет и ток на светодиоде (закон Ома, с ним не поспоришь). Значит, если входное напряжение нестабильно (в автомобилях обычно так и есть), то предварительно нужно стабилизировать напряжение, а потом можно ограничить резистором ток до необходимых значений. Если используем резистор, как токовый ограничитель там, где напряжение не стабильно, нужно стабилизировать напряжение.
Стоит помнить, что резисторы имеет смысл ставить только до определенной силы тока. После некоторого порога резисторы начинают сильно греться и приходится ставить более мощные резисторы (зачем резистору мощность рассказано в статье о этом приборе) . Тепловыделение растёт, КПД падает.
Импульсный стабилизатор тока
Импульсный стабилизатор тока тоже называют светодиодным драйвером. Часто те, кто не сильно разбирается в этом, стабилизатор напряжения называют просто драйвером светодиодов, а импульсный стабилизатор тока — хорошим светодиодным драйвером. Он выдаёт сразу стабильное напряжение и ток. И почти не нагревается. Вот так он выглядит:
Импульсный стабилизатор тока
МИКРОСХЕМНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ ШИРОКОГО ПРИМЕНЕНИЯ (КРЕН И АНАЛОГИ)
МИКРОСХЕМЫ ИНТЕГРАЛЬНЫЕ СЕРИИ 1334
ОТКРЫТОЕ АКЦИОНЕРНОЕ ОБЩЕСТО «ОРОНЕЖСКИЙ ЗАОД ПОЛУПРООДНИКОЫХ ПРИБОРО СБОРКА» СЕРИЙНООСОЕННЫЕ НОЫЕ ИЗДЕЛИЯ МИКРОСХЕМЫ ИНТЕГРАЛЬНЫЕ СЕРИИ 4 Микросхемы интегральные серии 4 с фиксированным выходным напряжением
ПодробнееТИРИСТОРЫ СИММЕТРИЧНЫЕ ( СИМИСТОРЫ ) ТС106-10, ТС112-10, ТС112-16, ТС122-20, ТС122-25, ТС13240, ТС132-50, ТС , ТС142-80
ТИРИСТОРЫ СИММЕТРИЧНЫЕ ( СИМИСТОРЫ ) ТС106-10, ТС112-10, ТС112-16, ТС122-20, ТС122-25, ТС13240, ТС132-50, ТС-132-63, ТС142-80 Симметричные тиристоры (симисторы) изготовлены на основе пятислойной кремниевой
ПодробнееIL78XX СЕРИЯ СТАБИЛИЗАТОРОВ НАПРЯЖЕНИЯ
СЕРИЯ СТАБИЛИЗАТОРОВ НАПРЯЖЕНИЯ ПОЛОЖИТЕЛЬНОЙ ПОЛЯРНОСТИ Микросхемы серии IL78XX представляют собой ряд стабилизаторов напряжения положительной полярности с выходным напряжением 5В, 6В, 8В, 9В, 12В, 15В,
ПодробнееОАО «Интеграл» филиал «Транзистор»
ОАО «Интеграл» филиал «Транзистор» «Темп-17ПЗ» Разработка микросхемы регулятора напряжения положительной полярности с низким остаточным напряжением для источников питания (функциональный аналог AMS1117)»
ПодробнееIL1501, IL , IL , IL
СЕРИЯ МИКРОСХЕМ ПОНИЖАЮЩЕГО DC/DC КОНЕРТЕРА (Функциональный аналог AP1501 ф. Anachip) Микросхемы IL1501, IL1501-33, IL1501-50, IL1501-12 — являются понижающими DC/DC конвертерами. Назначение микросхем
ПодробнееТИРИСТОРЫ СИММЕТРИЧНЫЕ ( СИМИСТОРЫ ) ТС106-10, ТС112-10, ТС112-16, ТС122-20, ТС122-25, ТС13240, ТС132-50, ТС , ТС142-80
модуль тиристорный Минск т.80447584780 www.fotorele.net www.tiristor.by радиодетали, электронные компоненты email [email protected] tel.+375 29 758 47 80 мтс каталог, описание, технические, характеристики,
ПодробнееУниверсальный интерфейс 4-20мА
Универсальный интерфейс — ма Возможности Токовый выход — ма для двухпроводной системы Общая ошибка преобразования.% (после калибровки) Нелинейность.% Точная установка защиты по выходному току. Независимая
ПодробнееОсновные характеристики
ЕУ(7У-0У) Диапазон напряжения питания, В Рабочая частота до 00 кгц Диапазон рабочих температур + С Металлокерамический корпус Н0.-В Категория качества «ВП» Технические условия АЕЯР.000.79-0 ТУ Предназначены
Подробнеезависящая от нагрузки.
Микросхема маломощного стабилизатора напряжения 5 В/150мАс низким остаточным напряжением (аналог TLE4268G ф. Siemens) ILE4268G (аналог TLE4268G ф. Siemens) — однокристальная интегральная микросхема маломощного
Подробнее1453УД1АС, 1453УД1БС, 1453УД2АС, 1453УД2БС, 1453УД1АС1, 1453УД1БС1, 1453УД2АС1, 1453УД2БС1
OAO «Экситон» 142500 г. Павловский Посад Московской обл., ул. Интернациональная, д.34а Тел. 8-(49643)-7-03-56 www.fabexiton.ru E-mail: [email protected] 1453УД1АС, 1453УД1БС, 1453УД2АС, 1453УД2БС,
Подробнее1309ЕН1.2Т, 1309ЕН1.8Т, 1309ЕН2.5Т, 1309ЕН3.3Т, 1309ЕР1Т, К1309ЕН1.2Т, К1309ЕН1.8Т, К1309ЕН2.5Т, К1309ЕН3.3Т, К1309ЕР1Т, К1309ЕР1Н4
Спецификация Линейный регулятор напряжения с малым падением напряжения 1309ЕН1.2Т, 1309ЕН1.8Т, 1309ЕН2.5Т, 1309ЕН3.3Т, 1309ЕР1Т, NC Vo FB GND Ключ 2 4 6 8 1309ЕР1Т XXYY 17 15 13 11 NC Vin EN NC Основные
ПодробнееКорпус микросхемы TDA1562Q
TDA1562Q мостовой усилитель мощности класса H Микросхема TDA1562Q представляет собой мостовой монофонический усилитель сигнала ЗЧ с максимальной выходной мощностью до 70 Вт на нагрузке сопротивлением 4
ПодробнееОсновные типономиналы
Одноканальные DC/DC ИВЭП Серия МП Вт, 10 Вт, 1 Вт, 2 Вт, 0 Вт Предназначены для применения в аппаратуре специального назначения наземного и морского базирования, авиационной, ракетной и космической техники
ПодробнееТС106-10, TC112-10, TC112-16, ТС122-20, ТС122-25, TC132-40, TC132-50, TC142-63, TC142-80
модуль тиристорный Минск т.80447584780 www.fotorele.net www.tiristor.by радиодетали, электронные компоненты email [email protected] tel.+375 29 758 47 80 мтс каталог, описание, технические, характеристики,
Подробнее1350НК3У, 1350НК3Т, 1350НК3Т1
OAO «ОКБ «Экситон» 142500 г. Павловский Посад Московской обл., ул. Интернациональная, д.34а Тел. 8-(49643)-2-31-07 www.okbexiton.ru E-mail: [email protected] 1350НК3У, 1350НК3Т, 1350НК3Т1 (Предварительная
ПодробнееОсновные типономиналы
Предназначены для применения в аппаратуре специального назначения наземного и морского базирования, авиационной, ракетной и космической техники классы 1-5 по ГОСТ РВ 20.39.304. Входное напряжение: 18 3
ПодробнееЛекция 9 СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
84 Лекция 9 СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ План 1. Введение 2. Параметрические стабилизаторы 3. Компенсационные стабилизаторы 4. Интегральные стабилизаторы напряжения 5. Выводы 1. Введение Для работы электронных
ПодробнееУниверсальный интерфейс 4-20мА /0-5мА
Универсальный интерфейс 4 — ма / — 5мА Возможности Токовый выход 4- ма для двухпроводной системы и -5 ма для четырехпроводной системы. Общая ошибка преобразования.5% (после калибровки) Нелинейность.% Точная
ПодробнееDC/DC преобразователи ВИПД100-ИР
DC/DC преобразователи ВИПД100-ИР Преимущества Внешняя синхронизация Без вентилятора Низкопрофильная 9,6 мм конструкция Рабочие температуры корпуса: -60 С +125 С Выходной ток до 20 А, мощность до 100 Вт,
ПодробнееСТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ К817ЕН2
ОКП 42 4512 СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ К817ЕН2 ПАСПОРТ 6ПИ.387.275 ПС 1. НАЗНАЧЕНИЕ 1.1. Стабилизаторы напряжения К817ЕН2 (в дальнейшем стабилизаторы) предназначены для питания стабилизированным напряжением
ПодробнееBстатье приведены основные
НОВЫЕ ЛОГИЧЕСКИЕ МИКРОСХЕМЫ КОМПАНИИ NXP СО СВЕРХНИЗКИМИ НАПРЯЖЕНИЕМ ПИТАНИЯ И ЭНЕРГОПОТРЕБЛЕНИЕМ Bстатье приведены основные характеристики и назначение логических элементов новой серии ИМС, выпускаемых
ПодробнееКАК ПРОВЕРИТЬ МИКРОСХЕМУ СТАБИЛИЗАТОР
Понадобилось собрать входные стабилизирующие цепи по питанию для устройства на основе микроконтроллера PIC16F628 стабильно работающего при напряжении от 5 вольт. Это не сложно. Взял интегральную микросхему PJ7805 и на её основе в соответствии со схемой из даташита сделал. Подал напряжение и на выходе получил 4,9 вольта. Всего скорей, что этого вполне достаточно, но упрямство, замешанное на педантичности, взяло верх.
Достал коробушку с интегральными стабилизаторами и вознамерился перемерить все соответствующего достоинства. А чтобы вдруг не ошибиться даже соответствующую схемку выложил перед собой. Однако энтузиазм закончился уже на первом же компоненте. Этот «ёжик без ручек, без ножек» из соединительных проводов с крокодилами желал жить своей жизнью и воли радиолюбителя подчинялся с большим трудом. Да к тому же проверяемый стабилизатор на выходе показал 4,86 вольта, чем поверг мой оптимизм в уныние.
Нет тут нужно что-то более существенное, например какой-то пусть и простой но, тем не менее, пробник что ли. Забил в поисковик яндекса и получил то, что видите на фото «Комплекс контроля интегральных стабилизаторов напряжения». Ну, это не для средних радиолюбительских умов. Стало ясно, что велосипед придётся изобретать.
Схема испытателя КРЕН
Составленная схема явно уступает верхней картинке, ну тут уж ничего не поделаешь, что можем. Конденсатор С1 устраняет генерацию при скачкообразном включении входного напряжения, С2 служит для защиты от переходных помеховых импульсов. Их ёмкость решил взять 100 мкФ. Вольтаж в соответствии с напряжением проверяемого стабилизатора. Ставить конденсаторы как можно ближе к корпусу интегрального стабилизатора. Диод VD1 1N4148 не позволит конденсатору на выходе стабилизатора разрядится через него после выключения (это чревато выходом стабилизатора из строя). U Вх. интегрального стабилизатора должно быть выше U Вых. минимум на 2,5 вольта. Нагрузку подбирать так же в соответствии с возможностями тестируемого стабилизатора.
На роль корпуса был выбран самодельный вариант оборудованный контактными штырями для соединения с мультиметром (минус в гнездо «сom», плюс в «V»). В качестве соединительного элемента выводов проверяемого компонента со схемой можно приспособить вот такой тройной штыревой контакт. В мою задачу входит проверка трёхвыводных интегральных стабилизаторов рассчитанных на напряжение не более 12 вольт поэтому в схему поставлю два конденсатора 100 мкф х 16 В. Диод согласно схемы.
В просверленные точно в соответствии с диаметром штыревых контактов отверстия их и вставляем, с внутренней стороны надеваем на каждый штырь по соответствующей (махонькой) металлической шайбочке, смочив активным флюсом и плотно прижав припаиваем каждую шайбу к соответствующему штырю не допуская соединения пар штырь – шайба между собой. Для этого шайбы нужно подточить, центральную с обеих сторон, крайние с одной. Отверстия по месту установки нужно
именно просверлить, если проколоть шилом образуется внутренняя неровность краёв отверстия и ровно + плотно установить шайбу не выйдет. Штыри, для прочности, также обязательно должны находится на общем твёрдом основании из диэлектрика.
Контактные площадки образованные местом пайки штырей и шайб становятся местом установки компонентов схемы. Получается компактно, также выполняется рекомендация минимального расстояния конденсаторов от выводов проверяемого интегрального стабилизатора. С соединительными проводами всё просто, главное взять их соответствующего цвета (для «+» красный, для «-» чёрный) и никакой путаницы не будет.
Подумав, установил кнопку включения нажимного действия, поставлена в разрыв плюсового (красного) провода на входе питания. Всё таки это удобство из разряда необходимых. Тройной штыревой контакт понадобилось «доработать» — немного согнуть, тут так, либо один раз подогнать контакты под выводы компонентов, либо перед каждым соединением ножки стабилизаторов гнуть под контакты.
Пробник – приставка к мультиметру готов. Вставляю в соответствующие гнёзда мультиметра штыри пробника, предел измерения выставляю 20 вольт постоянного напряжения, провода подвода электрического тока подсоединяю к лабораторному блоку питания в соответствии с их расплюсовкой, устанавливаю для проверки стабилизатор (попался на 10 вольт), выставляю соответственно на БП напряжение 15 вольт и нажимаю кнопку включения на пробнике. Устройство сработало, на дисплее 9,91 В. Далее в течении минуты разобрался со всеми трёхвыводными стабилизаторами на напряжение до 12 вольт включительно. Несколько, из числа бережно хранимых, оказались негодными.
Итого
Давно понятно, что вот такие простенькие пробники – приставки в радиолюбительском деле так же необходимы, как и весьма серьёзные измерительные приборы, но вот делать их (возиться с их изготовлением) попросту лень, а напрасно, и понимание этого приходит каждый раз когда это простенькое устройство всё же было собрано и оказало неоценимую помощь в творческих начинаниях. Автор — Babay iz Barnaula.
Форум
Форум по обсуждению материала КАК ПРОВЕРИТЬ МИКРОСХЕМУ СТАБИЛИЗАТОР
Устройство стабилизатора поперечной устойчивости
Одним из способов уменьшения крена кузова и улучшение показателей управляемости автомобиля является применение упругих дополнительных элементов, называемых стабилизаторами поперечной устойчивости. Применяются они в подвесках легковых автомобилей и автобусах. Стабилизатор поперечной устойчивости представляет собой упругое специальное устройство торсионного типа, которое устанавливается поперек автомобиля.
Устройство стабилизатора поперечной устойчивости: П-образного стержня круглого сечения, изготовленного из пружинной стали и плечей (стоек). Стержень подвижно (во втулках) крепится на раме или кузове, а плечами шарнирно соединяется с мостом или рычагами подвески.
При боковых кренах и поперечных угловых колебаниях кузова концы (плечи) стержня стабилизатора перемешаются в разные стороны один опускается, другой поднимается. Вследствие этого средняя часть стержня закручивается и частично изгибается, уменьшая тем самым крен и поперечное раскачивание кузова автомобиля. Создавая сопротивление крену и поперечным колебаниям кузова, стабилизатор в то же время не препятствует его вертикальным и продольным угловым колебаниям. При вертикальных перемещениях кузова прогибы подвесок одинаковы, перемещения плеч стабилизатора также одинаковы и скручивания стержня не происходит: он только проворачивается в опорных втулках. В этом случае стабилизатор практически не влияет на характеристику подвески.
Устройство стабилизатора поперечной устойчивости автомобиля ГАЗ-24 «Волга»:
б — конструкция; 1— штанга ; 2 — втулка; 3 и 5 — подушки; 4 — стойка.
На практике стабилизатор поперечной устойчивости представляет собой штангу П образной формы, круглого сечения. Изготавливают стабилизатор поперечной устойчиости из пружинной стали. Он устаналвивается поперек автомобиля и крепится к кузову автомобиля в двух местах с помощью хомутов и резиновых втулок. Наличие втулок созлает возможность вращения стабилизатора. Концы стабилизатора соединены с рычагами и амортизационными стойками.
Как работает стабилизатор поперечной устойчивостиРабота стабилизатора поперечной устойчивости основывается на перераспределении нагрузки между упругими элементами подвески. При боковом крене, когда взникают поперечные угловые колебания концы стабилизатора перемещаются в разные стороны (один поднимается, другой опускается). В это же время его средняя часть закручивается. Со стороны крена стабилизатор как–бы приподнимает кузов, а с другой – опускает. Если крен кузова увеличивается, сопротивление стабилизатора становится еще сильнее. Это оказывает эффект выравнивания автомобиля по отношению к плоскости дороги. Благодаря действию стабилизатора мы не только снижаем крен, но и улучшаются сцепные свойства шин при повороте.
различных типов систем стабилизации крена, используемых для судов
Представьте себя одним из первых пассажиров Royal Caribbean International — «Quantum of the Seas». Как только вы входите в корабль, вы слышите, как капитан просит всех пассажиров и членов экипажа пристегнуть ремни безопасности и оставаться в своих комнатах до завершения рейса!
Определенно, это то, что не хотел бы слышать ни один пассажир, который потратил целое состояние на то, чтобы насладиться прекрасными удобствами, едой и исключительной красотой такого чудесного корабля.
Однако это могло бы стать реальностью, если бы корабль не был оснащен оборудованием или был спроектирован таким образом, чтобы преодолевать все различные типы движений, ощущаемых на море.
Зачем брать только круизные лайнеры и океанские лайнеры, подумайте о грузовых судах, таких как балкеры, суда Ro-Ro или даже танкеры и газовозы. Только представьте, насколько сложно было бы безопасно перевозить груз (жидкий или навалочный), если бы у нас не было какой-либо технологии, позволяющей контролировать различные движения во время рейса.
В этой статье мы сосредоточимся на том, как мы можем контролировать «крен» корабля, и на различных принципах, лежащих в основе различных типов систем стабилизации крена.
Дополнительная литература: Электронные книги премиум-класса, написанные профессионалами морского дела
Качание действительно самая большая проблема среди всех других движений на море. Технологические достижения в проектировании кораблей уже дали нам, морским архитекторам, преимущество в изучении волновых движений вокруг корпуса корабля и разработке наилучшего возможного дизайна для минимизации таких эффектов и обеспечения комфортного и безопасного плавания для пассажиров и экипажа.
Кредиты изображений: Джордж / Викимедиа
Стабилизация крена может быть достигнута на обычных судах путем изменения формы их корпуса, однако уменьшение амплитуды крена возможно и другими способами. Системы стабилизации можно в целом классифицировать на —
- Пассивные системы: В которых не требуется отдельный источник энергии и специальная система управления, такая как трюмный киль, баки для предотвращения опрокидывания (пассивные), фиксированные плавники и система пассивных движущихся грузов.
- Активные системы: В которых момент, противоположный крену, создается движущимися массами или управляющими поверхностями с помощью силы, такой как активные плавники, баки против качения (активные), активный движущийся груз и гироскоп.
Трюмные кили
Bilge Keels — самые популярные и устанавливаемые на подавляющем большинстве судов. Это пластины, выступающие из поворота трюма и простирающиеся от средней половины до двух третей длины судна.
Во избежание повреждений они обычно не выступают за борт судна или линии киля, но им необходимо проникать через пограничный слой вокруг корпуса.
Они заставляют водный объект двигаться вместе с кораблем и создавать турбулентность, таким образом гася движение и вызывая увеличение периода и уменьшение амплитуды.
Несмотря на то, что они относительно небольшие по размеру, они имеют большие рычаги вокруг оси качения, и силы, действующие на них, создают большой момент, противодействующий качению.
Их эффект обычно усиливается за счет скорости движения вперед. Они выровнены с потоком воды, проходящей мимо корпуса в неподвижной воде, чтобы уменьшить их сопротивление в этом состоянии. Когда корабль катится, сопротивление увеличивается и немного замедляет корабль.
Конструктивный элемент трюмного киля (Источник: INA — Эрик Таппер)
Пассивная танковая система (Источник: Basic Ship Theory, BST)
Противоскользящие баки (активные)
Они аналогичны принципу пассивной системы резервуаров, но движение воды регулируется насосами или давлением воздуха над поверхностью воды.Цистерны с обеих сторон корабля могут быть соединены нижней конечностью или могут использоваться два отдельных бака.
Воздуховод содержит клапаны, управляемые устройством измерения крена. В этой концепции используется насос с осевым потоком, который направляет воду в резервуаре с одной стороны судна на другую, вместо того, чтобы заставлять ее плескаться под действием естественных сил крена, раскачивания и рыскания, как это происходит в пассивном резервуаре.
Система активного резервуара (Источник: www.hoppe-marine.com)
В упрощенной версии активной системы акселерометр определяет качательные движения, и сигналы от этого устройства измерения крена передаются на насос с переменным шагом, который регулирует поток жидкости между резервуарами.
Устройство может быть либо простым акселерометром, либо сложной гироскопической сенсорной системой, которая обнаруживает даже небольшой угол крена по гироскопической прецессии.
Таким образом, устройство можно использовать для управления движением корабля из-за каждой отдельной волны. Было обнаружено, что в зависимости от сложности системы активные стабилизаторы танка оставляют эффективность 80% или более при стабилизации движения.
Активные ласты
С активными плавниками чувствительная гироскопическая система определяет качение корабля и посылает сигнал в исполнительную систему, которая, в свою очередь, заставляет плавники двигаться в таком направлении, которое вызывает силы, противодействующие качению.Приводной механизм обычно электрогидравлический.
Киль, которые могут втягиваться в корпус, размещаются около поворота трюма, чтобы обеспечить максимальное воздействие сил, действующих на них.
Откидная створка задней кромки может использоваться для увеличения создаваемой подъемной силы. Мощность системы плавников обычно выражается в терминах устойчивого угла крена, который он может вызвать, когда корабль движется вперед в стоячей воде с заданной скоростью.
Сила на плавнике изменяется пропорционально квадрату скорости корабля, тогда как кривая GZ для корабля не зависит от скорости.Однако система плавников вряд ли будет очень эффективной на скорости ниже 10 узлов.
Расположение ребер в системе активированных плавников
Система стабилизатора плавников (источник: alibaba.com)
В следующей таблице показаны некоторые из основных аспектов стабилизаторов валков, о которых говорилось выше:
Таблица 1: Сравнение различных стабилизаторов крена (Источник: BST)
Из приведенного выше наблюдения можно сделать вывод, что каждая система стабилизации имеет свои преимущества и недостатки.Следовательно, необходимо приложить больше усилий к гидростатике и гидродинамике движения корпуса судна на волнах, чтобы избежать необходимости в какой-либо системе стабилизации крена или использовать ее до минимума.
Ссылки по теме: Загрузите 12 БЕСПЛАТНЫХ морских электронных книг — Щелкните здесь.
Кроме того, в принципе методы, используемые для стабилизации по крену, могут использоваться для стабилизации по тангажу, но задействованные мощности слишком велики, чтобы оправдать их использование.
К вам ..
Знаете ли вы о каких-либо других типах систем стабилизации крена, используемых для судов?
Сообщите об этом в комментариях ниже.
Заявление об ограничении ответственности: Мнения авторов, выраженные в этой статье, не обязательно отражают точку зрения Marine Insight. Данные и диаграммы, если они используются в статье, были получены из доступной информации и не были подтверждены каким-либо установленным законом органом. Автор и компания «Марин Инсайт» не заявляют об их точности и не берут на себя ответственность за них.Взгляды представляют собой только мнения и не представляют собой каких-либо руководящих принципов или рекомендаций относительно какого-либо курса действий, которым должен следовать читатель.
Данная статья или изображения не могут быть воспроизведены, скопированы, переданы или использованы в любой форме без разрешения автора и Marine Insight.
Роликовые стабилизаторы— WESMAR
Тихая и точная стабилизация
Система стабилизации, адаптированная для вашего судна, а также для того, как и где вы путешествуете!
Важно понимать, что существует множество факторов, влияющих на выбор оптимальной системы стабилизатора.Характеристики судна, такие как длина судна, вес, водоизмещение, парусность, период крена и метацентрическая высота, являются критическими факторами при выборе наилучшей системы стабилизатора. То, как и где вы путешествуете, также являются важными факторами при выборе системы стабилизации.
WESMAR DSP5000 Wave-Smart использует технологию прогнозирования вместе с фактическим движением судна для улучшения стабилизации судна. Он обеспечивает более быструю реакцию, более плавные остановки и заменяет погоню и потери энергии при минимальном уровне шума.
DSP5000 использует интегрированный процессор, который сочетает в себе ключевые элементы взаимодействия положения плавника, скорости и ускорения с характеристиками судна. Добавьте к этому легендарные прочные и надежные гидродинамические ласты WESMAR с нейтральной плавучестью, и вы получите совершенно новый уровень комфорта и контроля. Этот новый метод стабилизации обеспечивает максимальный комфорт, плавность хода и бесшумную работу, основанный на более чем 50-летнем опыте морской истории WESMAR.
Система управления DSP5000 проста и интуитивно понятна с бесшовными интерфейсами с современными передовыми технологиями, такими как GPS, CANBUS, комплекты сигнализации и многое другое.Активация системы осуществляется одним нажатием кнопки и доступна по запросу без времени на прогрев.
Комбинированный дисплей / контроллер с простым и интуитивно понятным интерфейсом пользователя
Стабилизатор WESMAR Характеристики
- Программируемый и расширяемый дисплей / контроллер с простым в использовании меню настроек
- Графическое отображение реакции плавника на перекатывание в реальном времени, которое может отслеживать пользователь
- Возможность добавления пользовательских экранов для конкретного судна Система управления Wave-Smart®
- WESMAR обеспечивает быстрый отклик и управление гидравлической системой, что обеспечивает бесшумное и плавное позиционирование стабилизаторов.
- Все данные о работе системы могут быть загружены на флэш-накопитель через встроенный порт USB, если это необходимо для устранения неполадок системы.
- Расширенный дисплей с простым и интуитивно понятным пользовательским интерфейсом
- Два режима для луча и преследования Интерфейс
- NMEA 2000 для судовых систем GPS автоматически подстраивается под скорость и положение судна.
- Совместимость с CANBUS
- Усовершенствованный внутренний электронный гироскоп обеспечивает контрольную обратную связь для крена и горизонта, работая вместе, чтобы поддерживать уровень судна в широком диапазоне условий
- Система остается стабильной при поворотах и остается стабильной при ускорении или замедлении судна
- Прочная трехслойная конструкция ребра состоит из прочной и легкой структурной пены, которая придает плавучесть плавучесть.
- Доступен с одинарными или двойными приводами в зависимости от размера ребер и конфигурации системы
- Может повысить топливную эффективность и сократить время в пути (ETE)
Модернизация электронного гироскопа
- Уникальный пакет модернизации WESMAR позволяет верфям и владельцам лодок модернизировать старые системы стабилизации до современного электронного гироскопа и органов управления DSP5000.
- Модернизация стабилизатора не требует замены существующих приводов и ребер; поэтому дорогостоящая вывозка не требуется.
- Модернизация WESMAR DSP5000 работает со всеми моделями стабилизаторов с плавными ребрами WESMAR, а также с стабилизаторами большинства других производителей.
- Обновление DSP5000 обычно можно выполнить менее чем за день.
Стабилизация ребер в сравнении со стабилизацией инерционного гироскопа?
В настоящее время обычно используются два типа систем стабилизации: стабилизация киля и инерционная гиростабилизация.У обоих есть достоинства и недостатки.
Стабилизация плавников наиболее эффективна для стабилизации «на скорости», обычно стоит меньше, добавляет немного веса судну, занимает минимум места, имеет низкое энергопотребление, бесшумна и может быть активирована мгновенно одним нажатием кнопки. Системы стабилизации плавников не так эффективны для стабилизации «на якоре».
Стабилизация инерционного гироскопа — это новинка и новинка, которая хорошо справляется «на якоре» для яхтсменов, которые часто бросают якорь в бурном море; однако они не так эффективны для стабилизации «на скорости».Они занимают большую площадь, потребляют больше энергии, требуют длительного цикла прогрева и выключения и, как правило, дороже в приобретении, установке и обслуживании.
Звоните в ВЕСМАР!
WESMAR предлагает широкий спектр систем стабилизаторов плавников, которые наиболее эффективны для стабилизации «на скорости» для судов размером от 30 футов до 200 футов с размерами плавников от 2 ½ квадратных футов до 33 квадратных футов (см. Матрицу продукции). Наши инженеры по применению и сеть авторизованных заводов, прошедших обучение и сертифицированных сервисных центров, готовы помочь в выборе наиболее эффективной системы стабилизации для вашего судна.
Галерея изображений [щелкните фото для увеличения]
Мореплаватель | Устранение крена лодки
Войдите в список, чтобы получать новости о
новых продуктах Seakeeper, эксклюзивных продажах и многом другом.
Имя
Фамилия
Адрес электронной почты
Страна Выберите CountryAfghanistanAlbaniaAlgeriaAmerican SamoaAndorraAngolaAnguillaAntarcticaAntigua и BarbudaArgentinaArmeniaArubaAustraliaAustriaAzerbaijanBahamasBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBermudaBhutanBoliviaBosnia и HerzegowinaBotswanaBouvet IslandBrazilBritish Индийский океан TerritoryBrunei DarussalamBulgariaBurkina FasoBurundiCambodiaCameroonCanadaCape VerdeCayman IslandsCentral Африканский RepublicChadChileChinaChristmas IslandCocos Килинг IslandsColombiaComorosCongoCongo, Демократическая Республика theCook IslandsCosta RicaCote d’IvoireCroatia HrvatskaCubaCyprusCzech RepublicDenmarkDjiboutiDominicaDominican RepublicEast TimorEcuadorEgyptEl SalvadorEquatorial GuineaEritreaEstoniaEthiopiaFalkland острова MalvinasFaroe IslandsFijiFinlandFranceFrance, MetropolitanFrench GuianaFrench PolynesiaFrench Южный TerritoriesGabonGambiaGeorgiaGermanyGhanaGibraltarGreeceGreenlandGrenadaGuadeloupeGuamGuatemalaGuineaGuinea-BissauGuyanaHaitiJamaicaHoly Престол (Ватикан Город-государство) Гондура Shong KongHungaryIcelandIndiaIndonesiaIran, Исламская Республика ofIraqIrelandIsraelItalyJapanJordanKazakhstanKenyaKiribatiKorea, Корейская Народно-Демократическая Республика ofKorea, Республика ofKuwaitKyrgyzstanLao Народная Демократическая RepublicLatviaLebanonLesothoLiberiaLibyan Арабская JamahiriyaLiechtensteinLithuaniaLuxembourgMacauMacedonia, бывшая югославская Республика ofMadagascarMalawiMalaysiaMaldivesMaliMaltaMarshall IslandsMartiniqueMauritaniaMauritiusMayotteMexicoMicronesia, Федеративные Штаты ofMoldova, Республика ofMonacoMongoliaMontserratMoroccoMozambiqueMyanmarNamibiaNauruNepalNetherlandsNetherlands AntillesNew CaledoniaNew ZealandNicaraguaNigerNigeriaNiueNorfolk IslandNorthern Mariana IslandsNorwayOmanPakistanPalauPanamaPapua Новый GuineaParaguayPeruPhilippinesPitcairnPolandPortugalPuerto RicoQatarReunionRomaniaRussian FederationRwandaSaint Киттс и NevisSaint LUCIASaint Винсент и ГренадиныСамоаСан-МариноСао-Томе и ПринсипиСаудовская АравияСенегалСейшельские островаСьерра-ЛеонеСингапурСловакия (Словацкая Республика lic) СловенияСоломоновы острова СомалиЮжная АфрикаЮжная Грузия и Южные Сандвичевы острова Испания Шри-ЛанкаSt.Елена Пьер и MiquelonSudanSurinameSvalbard и Ян Майен IslandsSwazilandSwedenSwitzerlandSyrian Arab RepublicTaiwan, провинция ChinaTajikistanTanzania, Объединенная Республика ofThailandTogoTokelauTongaTrinidad и TobagoTunisiaTurkeyTurkmenistanTurks и Кайкос IslandsTuvaluUgandaUkraineUnited арабских EmiratesUnited KingdomUnited StatesUnited Штаты Экваторияльная IslandsUruguayUzbekistanVanuatuVenezuelaViet NamVirgin острова (Британские) Виргинские острова (США) Уоллис и Футуна IslandsWestern SaharaYemenYugoslaviaZambiaZimbabwe
Подписываясь, я подтверждаю, что согласен получать маркетинговые сообщения от Seakeeper.
Нет, спасибо.
Экспериментальная проработка формы управления стабилизатором киля на нулевой скорости
Abstract
Стабилизатор киля на нулевой скорости используется для стабилизации крена судна на полной скорости. Он имеет два рабочих режима: нормальный режим предотвращения качения на основе подъемной силы и режим предотвращения перекатывания при нулевой скорости на основе сопротивления. Различные механизмы создания силы вызывают разные методы контроля, особенно в форме контроля. Стабилизатор ребра нулевой скорости работает синусоидальным образом в нормальном режиме, так же, как и обычный стабилизатор ребра.Однако форма его управления на нулевой скорости не особенно ясна. Эта статья направлена на исследование формы управления стабилизатором киля на нулевой скорости с помощью комбинированного метода теоретического анализа и экспериментальных исследований. На основе установленной модели силы реакции сравниваются и анализируются силы, возникающие на гребне, имеющем синусоидальную и трапециевидную формы. Обнаружено, что колебание трапециевидной формы с малым коэффициентом полупериода генерирует большую силу, чем форма синусоидального колебания, когда амплитуда колебания одинакова.Проведены испытания цистерны принудительной прокатки при взмахе ребер синусоидальной и трапециевидной формы. Результаты испытаний согласуются с результатами теоретического анализа, и для стабилизаторов плавников на нулевой скорости рекомендуется использовать трапециевидную форму с подходящим малым полупериодом. Стратегия управления стабилизатором киля на нулевой скорости получена на основе дальнейшего анализа силовых характеристик трапециевидной формы махания и ограничений реальной системы срабатывания стабилизатора киля.Были проведены модельные и полномасштабные испытания на обжатие на нулевой скорости, в результате которых было достигнуто более 70% и 60% эффекта предотвращения качения соответственно. Результаты испытаний дополнительно подтверждают эффективность, применимость и практичность полученной формы управления и стратегии для стабилизаторов плавников в условиях стоянки, и могут быть справочными для инженерной практики и других подобных исследований.
Образец цитирования: Zhang S, You P, Zhao P, Liang L, Li R (2019) Экспериментальное исследование формы управления стабилизатором киля на нулевой скорости.PLoS ONE 14 (5): e0216395. https://doi.org/10.1371/journal.pone.0216395
Редактор: Мауро Вильярини, Universita degli Studi della Tuscia, ИТАЛИЯ
Поступила: 20.10.2018; Принят в печать: 21 апреля 2019 г .; Опубликован: 17 мая 2019 г.
Авторские права: © 2019 Zhang et al. Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Доступность данных: Все соответствующие данные находятся в рукописи.
Финансирование: Автор (ы) не получил специального финансирования для этой работы.
Конкурирующие интересы: Авторы заявили об отсутствии конкурирующих интересов.
1 Введение
Судно, плывущее по морскому пути, неизбежно генерирует движение с шестью степенями свободы с нарушением морской среды, будь то на якоре, на низкой скорости или в условиях средней / высокой скорости [1].Креновое движение оказывает значительное влияние на безопасность судна по сравнению с другими пятью степенями свободы. Большой крен может повлиять на мореходные качества и безопасность корабля, надежность и работу бортового оборудования, сохранность груза, комфорт и эффективность экипажа, а также степень поражения вооружения военно-морского корабля [2 , 3]. Поскольку демпфирование крена уменьшается с уменьшением скорости движения, крен судов на нулевой скорости становится более сильным [4]. С увеличением масштабов морской эксплуатации и использования все больше и больше операций на борту необходимо выполнять на низкой и даже нулевой скорости, например, спуск и подъем рабочей лодки, взлет и посадка бортового вертолета [5, 6].Поэтому, кроме нормальной скорости, необходимо также уменьшить крен корабля на нулевой скорости.
Обычными устройствами уменьшения крена на полной скорости являются трюмный киль, бак, препятствующий качению, движущийся груз и гиростабилизатор [7]. Трюмный киль представляет собой пассивное устройство предотвращения опрокидывания. Он ограничен сопротивлением плаванию и маневренностью и не может удовлетворять требованиям стабилизации. Обычно используется вместе с другими активными устройствами стабилизации поперечной устойчивости [8]. Бак для предотвращения перекатывания должен занимать ценное пространство в кабине для достижения удовлетворительного эффекта уменьшения крена [9].Движущийся вес должен потреблять большое количество энергии [10]. Гиростабилизатор создает восстанавливающий момент за счет высокой скорости вращения ротора. Обычно он устанавливается на судах водоизмещением в сто или двести тонн из-за его небольшой способности гасить крен [11].
Ребристый стабилизатор является наиболее эффективным и наиболее часто используемым устройством для активного уменьшения крена [12]. Его эффект предотвращения перекатывания при высокой скорости плавания может достигать 90% [13]. Однако, ограниченный механизмом создания силы на основе подъемной силы, его способность демпфирования крена на низкой и нулевой скорости оставляет желать лучшего [14].Для решения проблемы улучшен режим работы стабилизатора киля и предложен новый механизм создания силы, который получил название «лопасть» [15–17]. Усовершенствованный стабилизатор киля называется стабилизатором киля с нулевой скоростью, поскольку он не только обеспечивает снижение крена при нормальной скорости судна, но также уменьшает крен судна при нулевой скорости. Таким образом, он имеет два рабочих режима: нормальный режим предотвращения качения на основе подъемной силы и режим предотвращения перекатывания при нулевой скорости на основе сопротивления [18, 19].
Стабилизатор ребра с нулевой скоростью движется синусоидальным образом в соответствии с вызванным волной креном в нормальном режиме предотвращения качения, точно так же, как обычные стабилизаторы ребра [20]. Пока не особо понятен способ его работы в якорных условиях. В существующей литературе описаны различные методы управления плавником на нулевой скорости. Даллинга и др. предложили метод управления ударами, который заключается в повороте ребра от максимального угла одной стороны к максимальному углу противоположной стороны в каждом цикле прокатки [21].Себастьяни и др. разработал метод управления типа MM, основанный на многомерной теории оптимального управления, целью которого является достижение максимального уменьшения крена при минимальной активности плавников [22]. Jin et al. разработан нечеткий регулятор с минимальным энергопотреблением на основе генетического алгоритма [23]. Ван предложил двухступенчатый закон управления «ведущий-ведомый» для решения нелинейной проблемы между движением плавника и силой, создаваемой на плавнике [24]. Song et al. разработал адаптивный контроллер на основе радиальной базисной функции и нейронной сети общей регрессии [25].Su et al. использовал нечеткий регулятор режима скольжения для уменьшения крена при нулевой скорости [26]. Liang et al. достигли стратегии управления стабилизатором плавников на нулевой скорости, основанной на согласовании фаз между возмущением и компенсацией в условиях стоянки [27]. По результатам моделирования и испытаний, приведенных в приведенной выше литературе, можно сделать вывод, что управляющий сигнал стабилизатора плавников нулевой скорости можно грубо разделить на два типа: трапециевидный и синусоидальный сигналы угла плавника. Результаты моделирования и испытаний показывают, что две формы управляющих сигналов обладают удовлетворительным эффектом предотвращения качения.Однако не приводятся плюсы и минусы этих двух форм управляющих сигналов. Эта статья направлена на исследование формы управляющего сигнала стабилизатора плавников нулевой скорости в условиях стоянки на якоре посредством испытания резервуара с водой с использованием масштабированной модели корабля с двумя парами стабилизаторов плавников нулевой скорости. Структура статьи организована следующим образом. Раздел 2 устанавливает модель силы реакции, создаваемой машущим плавником при нулевой скорости, а также сравнивает и анализирует силы реакции синусоидальной и трапециевидной форм машущего крыла.В разделе 3 подробно описана система управления уменьшением крена на нулевой скорости, используемая для испытания водяного бака. Раздел 4 дает подробную информацию о результатах тестирования и обсуждениях. Наконец, дается вывод.
2 Теоретический анализ
Подобно веслам или лопастям лягушки, сила реакции может быть создана на плавнике при нулевой скорости за счет активного захлопывания [14]. Сила в основном состоит из силы сопротивления давления, силы сопротивления вихря и дополнительной силы инерции. Для упрощения анализа для моделирования гидродинамических сил выбрано симметричное ребро, показанное на рис. вал соответственно.
Когда ребро вращается, жидкость, выпускаемая ребром, создает силу реакции на ребро, которая перпендикулярна поверхности ребра и пропорциональна количеству жидкости, выпускаемой в единицу времени. Сила, тесно связанная с формой и движением ребра, называется сопротивлением давления и может быть рассчитана как [20]: (1) Где C D — коэффициент лобового сопротивления, ρ — плотность жидкости, ω f — угловая скорость ребра.
Вихревое сопротивление создается движением жидкости в пограничном слое по поверхности ребра и может быть рассчитано как [14]: (2) Где k 2 — длина вихря задней кромки в направлении хорды.
Определенная масса жидкости ускоряется или замедляется, когда плавник взмахивает вверх и вниз, и придает ему силу из-за своей инерции. Сила называется добавленной силой инерции и может быть рассчитана как [27]: (3) Где ka — коэффициент, связанный с угловой скоростью ребра, — угловое ускорение ребра.
Таким образом, общая гидродинамическая сила, создаваемая плавником, может быть выражена как: (4)
Из приведенного выше анализа видно, что реакционная гидродинамическая сила, создаваемая на ребре при нулевой скорости, может рассматриваться в некоторой степени как состоящая из двух различных типов сил, то есть добавленной силы инерции, пропорциональной угловому ускорению плавника. плавник и сила сопротивления, пропорциональная квадрату угловой скорости плавника. С учетом направления силы и угловой скорости ребра заменить на ω f | ω f | и перепишем уравнение (4) как: (5) Где K 1 и K 2 — коэффициенты, относящиеся к параметрам ребра.
Из уравнения (5) видно, что гидродинамическая сила реакции увеличивается с увеличением угловой скорости и ускорения ребра. Следовательно, чтобы добиться лучшего эффекта уменьшения крена при нулевой скорости, сила, создаваемая на ребре, должна быть как можно большей. Однако угловая скорость и ускорение ребра ограничены физическими ограничениями исполнительной системы. Следовательно, сила, создаваемая на плавнике, также ограничена. Когда максимальный угол ребра фиксирован, то, как он движется, определяет угловую скорость и ускорение ребра.Следовательно, важно определить оптимальную форму управления стабилизатором ребра на нулевой скорости для увеличения силы реакции и улучшения эффекта предотвращения качения. Как упоминалось выше, формы управления в литературе можно условно разделить на синусоидальное и трапециевидное управление углом ребра. Целью данной статьи является исследование оптимальной формы управляющего сигнала стабилизатора киля в якорных условиях.
Чтобы получить большую силу реакции, плавник обычно взмахивает из одного крайнего положения в другое и обратно.Без ограничения общности, синусоидальный и трапециевидный углы ребра с максимальным углом ребра ± 40 ° и периодом взмахов 8 с, обозначенные как S-тип и T-тип соответственно, показаны на рис. 2. λ в легенде к На рис. 2 представлен коэффициент полупериода. Как показано на рис. 3, коэффициент полупериода определяется как λ = a / b . Зеленая пунктирная линия — это касательная к синусоидальному угловому сигналу оребрения в точке пересечения нуля, соответствующая коэффициенту полупериода 2/ π .
Следует отметить, что трапециевидный угол ребра, показанный на рис. 2, на самом деле не существует. На практике кривая угла ребра аналогична трапецеидальному типу, включая ускорение, переход с постоянной скоростью, замедление и отдых. Для удобства сравнения и анализа кривая угла трапецеидального ребра упрощена. При движении ребра от -40 ° до + 40 ° по синусоиде угловая скорость ребра сначала увеличивается, а затем уменьшается, и максимальное значение достигается в точке перехода через ноль.При этом угловая скорость ребра остается неизменной при движении по трапециевидной форме. Угловая скорость плавника при движении по трапеции с λ <2/ π больше, чем при движении по синусоиде при движении оребрения. Большая угловая скорость ребра означает большую силу гидродинамической реакции.
Поскольку за любой фазой ускорения в начале хода ребра всегда должна следовать противоположная фаза замедления в конце хода, два вклада инерции, связанные с угловым ускорением плавника, более или менее компенсируют друг друга.Для удобства анализа, без учета добавленной силы инерции, силы сопротивления двух форм управления даны, как показано на рис. 4. Силы рассчитываются с использованием уравнения (5) с ρ = 1000 кг / м 3 , K 1 = 20,58 и K 2 = 4,974 из [28]. Амплитуда и продолжительность силы приведены в таблице 1. Видно, что амплитуда силы реакции увеличивается, а продолжительность уменьшается с уменьшением отношения полупериодов соответственно.Хотя сила реакции, создаваемая на плавнике, перемещающемся в синусоидальной форме, существует на протяжении всего движения, ее амплитуда велика только вблизи точки пересечения нуля угла ребра. В общем, сила реакции, создаваемая на лопасти, закрывающем трапециевидную форму, с коэффициентом полупериода менее 2/ π больше, чем в синусоидальной форме, что означает, что плавник имеет больший эффект предотвращения качения, когда он колеблется в трапециевидной формы с надлежащим передаточным числом полупериода при нулевой скорости. Однако малый полупериод требует не только большой мощности, но и приводит к неприятным рывкам.Следовательно, важно выбрать правильное соотношение полупериода в пределах ограничений системы срабатывания. Дальнейший проверочный анализ проводится путем испытания резервуара для воды, указанного в Разделе 4.
3 Описание системы
Система управления стабилизацией по крену на нулевой скорости, как показано на рис. 5, спроектирована и изготовлена Институтом исследований по стабилизации и управлению судов Харбинского инженерного университета. Вся система состоит из резервуара для воды, масштабной модели корабля, модуля датчика ориентации, двух пар моделей стабилизаторов плавников и их рулевых механизмов с электроприводом, системы принудительного крена и ее приводной системы, нескольких грузиков и двух ПК (один используется для запуска программы управления приводом устройства принудительного крена, а другой используется для управления плавниками и сбора данных).
3.1 Модель корабля
В качестве объекта исследования выбрано рыболовное судно длиной 84 метра. Масштабированная модель рыболовного судна с масштабным соотношением 1:25 построена для проведения испытания резервуара с водой. Основные параметры корабля и масштабной модели приведены в таблице 2.
3.2 Ребро модели
Как показано на рис. 5, уменьшенная модель корабля оснащена двумя парами параллелограммных стабилизаторов оперения. Как упоминалось в разделе 2, гидродинамическая сила, создаваемая на плавнике с использованием «лопастного» режима, в основном состоит из сопротивления давления, сопротивления вихря и силы добавленной массы [14, 19, 20, 27].Сопротивление давления и сопротивление вихря пропорционально квадрату угловой скорости ребра, а добавленная массовая сила пропорциональна угловому ускорению ребра [22, 28–30]. Следовательно, когда определяется движение ребра, гидродинамическая сила, создаваемая на ребре, может быть увеличена за счет оптимизации параметров формы ребра. Согласно результатам моделирования и испытаний Jin et al. [20] и Song et al. [31], положение вала, соотношение сторон и задняя форма имеют наиболее значительное влияние на гидродинамическую силу, когда площадь ребра постоянна.
3.2.1 Положение вала ребра.
Под воздействием специального режима работы при нулевой скорости гидродинамические силы, возникающие на передней и задней сторонах вала оребрения, имеют противоположное направление. Сила, создаваемая на передней стороне вала оребрения, снижает общую силу, препятствующую качению. Следовательно, это эффективный способ перемещения вала оребрения вперед для увеличения силы, создаваемой при нулевой скорости. Однако движение вала оребрения вперед значительно увеличивает крутящий момент на средних и высоких скоростях.Следовательно, положение вала ребра в практических приложениях должно определяться на основе конкретного типа судна, условий эксплуатации и индикаторов предотвращения качения, а рекомендуемое положение вала ребра составляет 1/6 ~ 1/5 хорды ребра от передней кромки [ 31].
3.2.2 Соотношение сторон.
Когда площадь и положение вала ребра определены, чем меньше соотношение сторон, тем больше площадь на задней стороне вала ребра и, следовательно, тем больше гидродинамическая сила, создаваемая на машущем ребре.Однако меньшее удлинение не способствует уменьшению крена корабля на средних и высоких скоростях. Следовательно, определение соотношения сторон нулевой скорости в стабилизаторе должно быть всесторонне рассмотрено на основе реальных условий, и рекомендуемое соотношение сторон составляет 0,35 ~ 0,6 [20].
3.2.3 Ребро параллелограмма.
Из приведенного выше анализа можно видеть, что цель изменения положения вала ребра и соотношения сторон состоит в том, чтобы увеличить генерируемую эффективную демпфирующую силу за счет увеличения площади задней стороны вала ребра.Однако как изменения положения вала ребра, так и соотношения сторон имеют противоречия в приложениях с нулевой / низкой скоростью и средней / высокой скоростью. Один из способов разрешить это противоречие — заменить обычное трапециевидное или прямоугольное ребро на ребро в форме параллелограмма. В случае, когда площадь ребра, положение вала и соотношение сторон фиксированы, увеличенная площадь задней кромки на задней стороне вала ребра может значительно увеличить усилие, препятствующее качению; Между тем, уменьшение площади передней кромки на передней стороне вала ребра снижает потерю эффективного усилия, препятствующего качению.Более того, это изменение мало влияет на крутящий момент на средней и высокой скорости и увеличивает коэффициент подъемной силы на средних и высоких скоростях. Внутренний острый угол ребра параллелограмма может использоваться для описания изменения, и рекомендуемое значение составляет 60 ° ~ 80 ° [31].
3.2.4 Параметры плавников.
На основании вышеизложенного анализа были разработаны две пары стабилизаторов с параллелограммными ребрами, которые удовлетворяют требованиям к уменьшению крена на полной скорости. Основные параметры модели киля и киля приведены в таблице 3.Расстояние между валом ребра и передней кромкой ребра составляет 1/5 хорды. Внутренний острый угол 80 °. Модель стабилизатора плавников и его драйверный модуль показаны на рис. 6. Ребра приводятся в движение цифровым сервоприводом Dynamixel MX-64 от BJROBOT. Крутящий момент в состоянии покоя и частота вращения холостого хода при рабочем напряжении 12 В составляют 6,0 Нм и 63 об / мин соответственно. Следует отметить, что для исследования эффекта трапециевидной формы махания с различными амплитудами махов и коэффициентами полупериода максимальная амплитуда махов модели стабилизатора киля установлена на ± 60 °, а частота плавания модели не равна ограничено.
3.3 Система с принудительным валком
Как показано на Рис. 7, система принудительного крена используется, чтобы заставить модель корабля вращаться вокруг своей продольной оси в соответствии с командным сигналом. Система принудительной прокатки состоит из управляющего компьютера, приводного двигателя, местного блока управления и устройства принудительной прокатки. Частоту и амплитуду движения принудительной крены модели корабля можно изменить, регулируя скорость вращения устройства принудительной крены и положение груза на поворотном рычаге, соответственно.По соображениям безопасности груз прикреплен к середине поворотного рычага, чтобы ограничить амплитуду принудительного крена. Приводным двигателем системы принудительного крена является серия S-FLAG компании Sankyo, а максимальная скорость вращения, соответствующая входному напряжению 10 В, может достигать 3000 об / мин.
3.4 Противовес
Связь между моделью корабля и реальным кораблем должна удовлетворять не только геометрическому сходству и подобию распределения массы, но и подобию центра тяжести [32].Таким образом, модель корабля должна быть взвешена с использованием комков, чтобы соответствовать принципу подобия. Подвесной метод используется для выполнения противовеса модели корабля. Здесь используются четыре гирьки. Три из них находятся на палубе, а четвертый закреплен в кабине за устройством принудительной перекатывания. Состояние модели корабля после противовеса показано на рис. 5.
3.5 Программа для ПК
Человеко-машинный интерфейс программы для ПК, показанный на рис. 8, написан на C #.Основными функциями программы для ПК являются сбор, отображение и хранение данных, выбор режима управления, настройка параметров управления и так далее. Программа для ПК работает на компьютере с процессором Intel Core i5 650 @ 3,2 ГГц и 4 ГБ ОЗУ, на котором установлена 64-разрядная версия Win 7.
.4 Эксперименты и обсуждения
4.1 Испытание на распад свободного качения
Испытание на затухание свободного крена проводится для получения естественного периода качения и безразмерного коэффициента демпфирования масштабированной модели корабля.Поместите модель корабля в воду и приложите направленную вниз силу к одной стороне модели корабля, чтобы наклонить ее до определенного угла крена. Затем быстро снимите силу после того, как поверхность воды успокоится. Модель корабля катится вокруг своей продольной оси под действием восстанавливающего момента и момента инерции. Амплитуда качения постепенно снижается до нуля под действием демпфирующего действия воды. Движение затухания крена измеряется датчиком скорости крена, записывается и сохраняется программой ПК.Всего было проведено 8 серий испытаний на распад свободного валка. Типичный набор кривой затухания валка и его аппроксимирующая кривая исключения показаны на рис. 9. Результаты 8 наборов испытаний на затухание свободного валка показаны в таблице 4, где T P представляет собой размах от пика до максимума. период пика, T Z — период пересечения нуля, а n u — безразмерный коэффициент затухания.
Из-за размера резервуара для воды, движение затухания валка нарушается эхом от стены.Из рисунка 9 видно, что движение затухания валка после 4 периодов испытывает большее возмущение. Следовательно, расчет периода качения и коэффициента демпфирования выполняется с использованием данных первых четырех периодов. Естественный период качки модели корабля, 1,6964 с, получается путем усреднения T P и T Z . Из таблицы 1 видно, что полученный естественный период качки модели корабля практически совпадает с теоретическим значением 1.7 с. Безразмерный коэффициент демпфирования 0,1658 получается усреднением n u 1 ∼ n u 8 .
4.2 Испытание на принудительную качку только с стабилизатором ребра
Для изучения потенциала предотвращения качения разработанного стабилизатора с параллелограммным ребром при различных формах управления углом наклона ребра были проведены испытания принудительной качения со стабилизатором ребра, работающим по синусоидальной и трапециевидной формах.Период махания установлен на 1,6964 с, что совпадает с периодом естественного качения модели корабля.
4.2.1 Испытание принудительным качением с синусоидальным сигналом угла ребра.
Амплитуда сигнала синусоидального угла ребра составляет от 10 ° до 60 ° с интервалом 10 °. Результаты испытания принудительной прокаткой с синусоидальным сигналом управления углом наклона ребра разной амплитуды показаны на рис. 10.
Для наглядного сравнения в таблице 5 показаны максимальные углы принудительного крена при синусоидальных сигналах управления углом ребра разной амплитуды.Из таблицы 5 видно, что максимальный угол вынужденного крена увеличивается с увеличением амплитуды сигнала угла ребра. Максимальный угол принудительного крена может достигать 4,17 ° при амплитуде сигнала угла ребра 60 °.
4.2.2 Испытание принудительным качением с сигналом угла трапециевидного ребра.
Амплитуда сигнала угла трапециевидного ребра устанавливается равной 10 ° ∼60 ° с интервалом 10 °. Чтобы исследовать влияние коэффициента полупериода сигнала угла трапециевидного ребра на движение крена, коэффициент полупериода устанавливается равным 0 ~ 0.5 с интервалом 0,1. Таким образом, всего было проведено 36 наборов тестов с различными комбинациями амплитуды сигнала и отношения полупериодов. Результаты испытания принудительной прокаткой с сигналом угла трапециевидного ребра показаны в таблице 6. Ограниченные длиной, результаты испытания принудительной прокаткой с коэффициентом полупериода 0,2 и различными амплитудами сигнала показаны на рис. 11.
4.2.3 Обсуждение и анализ.
Для сравнения результаты испытаний принудительной прокаткой с синусоидальными и трапециевидными сигналами угла ребра суммированы, как показано на Рис. 12.Из рисунка 12 видно, что максимальный угол принудительного крена увеличивается с увеличением амплитуды сигнала угла ребра, когда коэффициент полупериода остается постоянным. Когда амплитуда сигнала угла ребра фиксирована, угол принудительного крена существенно уменьшается по мере увеличения передаточного числа полупериода. Также можно видеть, что углы принудительного крена почти одинаковы, когда амплитуда угла ребра больше 30 °, а коэффициент полупериода меньше 0,2. В основном это связано с тем, что требуемая скорость плавников превышает предел сервопривода привода.Когда амплитуда угла ребра меньше 20 °, а коэффициент полупериода больше 0,3, результирующие углы принудительного крена также относительно близки. Небольшая амплитуда угла оперения ограничивает доступность максимальной скорости оперения и создаваемой силы реакции для качения модели корабля. Из общей тенденции результатов можно сделать вывод, что при той же амплитуде колебания угол принудительного крена с лопастями, машущими трапециевидной формой, с надлежащим малым коэффициентом полупериода больше, чем при перемещении в синусоидальной форме, что подтверждает результаты. полученные теоретическим анализом в разделе 2.Таким образом, рекомендуется иметь трапециевидную форму крыльев при нулевой скорости с малым коэффициентом полупериода и большой амплитудой взмахов, чтобы создать большую силу реакции и улучшить эффект предотвращения перекатывания. Похоже, что следующие две стратегии управления обжатием на нулевой скорости могут быть получены путем анализа результатов испытания принудительной прокаткой:
- Зафиксируйте коэффициент полупериода и измените амплитуду взмахов плавника в соответствии с информацией о крене судна;
- Зафиксируйте амплитуду взмахов плавника и измените коэффициент полупериода в соответствии с информацией о крене судна.
Однако следует отметить, что испытание на принудительную качку не ограничивает максимальный угол ребра и скорость ребра в соответствии с реальной системой для целей разведки. Вышеупомянутые два метода по существу одинаковы после учета фактического максимального угла ребра и предела скорости ребра. Когда максимальный угол оребрения и частота оребрения фиксированы, минимальный коэффициент полупериода также определяется в соответствии с определением коэффициента полупериода. Также можно определить максимальную силу реакции, создаваемую машущими крыльями.Следовательно, противодействие качению стабилизаторов киля при нулевой скорости уменьшается по мере увеличения морских условий, что является таким же, как и полученное в литературе.
Согласно Конолли [33], крен корабля, оснащенного стабилизаторами плавников, может быть выражен следующим линейным уравнением как: (6) Где ϕ — угол крена, I x и Δ I x — момент инерции и добавленный момент инерции, соответственно, 2 N u — вал момент демпфирования на единицу угловой скорости качения, D — водоизмещение корабля, h — поперечная метацентрическая высота, K W — момент волнового возмущения и K C — противодействие. — управляющий момент качения, создаваемый плавниками.
Из уравнения (6) видно, что судно прекратит качение, если момент волнового возмущения будет полностью компенсирован управляющим моментом, препятствующим качению плавником. Хотя механизм принудительной генерации на нулевой скорости отличается от механизма для скорости, он очень эффективен для уменьшения крена судна путем увеличения демпфирования крена в обоих случаях. Простым способом увеличения эквивалентного демпфирования крена является создание большой силы реакции в момент наибольшей скорости крена.На основе анализа характеристик силы реакции, создаваемой на гребне, имеющем трапециевидную форму, принят метод управления «удар-удар». То есть управлять плавниками, чтобы они быстро перемещались из одного крайнего положения в другое, когда угловая скорость судна по крену наибольшая. Известно, что скорость крена достигает наибольшего значения в точке пересечения нуля угла крена. Следовательно, команда угла киля может быть получена на основе обратной связи от угла крена и скорости крена, чтобы уменьшить крен корабля.Как показано на рис. 13, принцип управления уменьшением крена при нулевой скорости аналогичен принципу управления скоростью.
Когда период крена и максимальный угол ребра фиксированы, коэффициент полупериода обратно пропорционален частоте вращения ребер согласно его определению. Следовательно, в этом случае минимальный коэффициент полупериода достигается при взмахе ребра с максимальной скоростью. Чтобы повысить эффективность работы на нулевой скорости, стабилизаторы ребер должны иметь максимальные углы ребер и минимальный коэффициент полупериода для создания наибольшей силы реакции.Это верно для большого крена. Однако из-за случайности волн корабль в какой-то момент имеет небольшую амплитуду качения. Если по-прежнему управлять крыльями, чтобы они хлопали с максимальной амплитудой и минимальным коэффициентом полупериода, возникнет явление чрезмерного предотвращения перекатывания. В этом случае может оказаться практичным и экономичным уменьшить амплитуду взмахов лопастей, что эквивалентно увеличению коэффициента полупериода при одновременном обеспечении скорости взмахов лопастей. Следующая формула может использоваться для расчета амплитуды взмахов ласт как: (7) Где — амплитуда взмахов ребра, α max — максимальный угол ребра, α 0 — нижний предел амплитуды колебания для обеспечения эффективности работы на нулевой скорости, K — весовой коэффициент, определяющий амплитуда взмахов плавника, и ее значение составляет от 0 до 1 в зависимости от величины крена корабля.Здесь используется фильтр Калмана для прогнозирования следующего пика крена для вычисления весового коэффициента на основе скорости крена в точке пересечения нуля угла крена. На основе приведенного выше анализа может быть получена следующая логика управления, как показано на фиг. 14. RRC на фиг. 14 означает управление уменьшением крена. Скорость крена, когда судно качается влево, определяется как положительная скорость крена. Конечное положение взмаха плавника для переката корабля в левый борт определяется как положительное.Плавники должны быть быстро переведены в крайнее положительное или отрицательное положение, чтобы подготовиться к следующему маханию, предотвращающему перекатывание, в соответствии с информацией о качении при включении RRC.
4.3 Испытание на обжатие
4.3.1 Испытание модели резервуара.
Модель танка с уменьшением крена была проведена для изучения влияния стабилизаторов на нулевой скорости в соответствии со стратегией управления, полученной в разделе 4.2.3. Устройство принудительной прокатки используется для создания момента возмущения крена, чтобы катить модель корабля.Амплитудно-частотная характеристика крена модели корабля под действием устройства принудительной качки представлена на рис. 15. Видно, что максимальная характеристика крена имеет место при частоте крена около 3,7 Гц. Соответствующий период качения можно легко вычислить как 2 π / 3,7 = 1,698 с, что дополнительно подтверждает результаты испытания на затухание при свободном качении. На этой частоте проводились испытания модели бака для уменьшения крена.
Результаты отклика на крен без и с контролем уменьшения крена (RRC) показаны на рисунках 16 и 17 соответственно.Видно, что крен модели корабля с RRC значительно уменьшен. Среднеквадратичные значения угла крена без и с RRC составляют 6,27 ° и 1,87 ° соответственно. Соответствующий эффект предотвращения перекатывания составляет около 70,18%, что вполне удовлетворительно. Таким образом, форма и стратегия управления, полученные в данной статье, предварительно проверяются. Ребристые стабилизаторы, имеющие трапециевидную форму под действием предложенной стратегии управления, перспективны и эффективны для уменьшения крена при нулевой скорости.
4.3.2 Полномасштабное испытание на обжатие.
Полномасштабное испытание на обжатие на якоре было проведено после завершения модификации системы стабилизатора киля с полученной формой контроля и методом, упомянутым выше, на основе испытания модели резервуара. Во время полномасштабного испытания на уменьшение крена море оставалось примерно в состоянии 4. Типичные наблюдаемые крены показаны на рис. 18. Среднеквадратичное значение угла крена без RRC составляет около 3,15 °. Рис. 19 показывает реакцию крена и действие ласт после включения RRC.Видно, что амплитуда крена с RRC сильно уменьшилась. Соответствующее среднеквадратичное значение угла крена можно рассчитать как 1,13 °. Среднеквадратичное значение угла крена с RRC уменьшается на 2,02 ° по сравнению с этим без RRC, а эффект предотвращения качения составляет около 64,13%, что вполне удовлетворительно для полномасштабного испытания на уменьшение крена. Результаты полномасштабных испытаний дополнительно подтверждают эффективность и применимость полученной формы управления и стратегии для стабилизаторов плавников в условиях стоянки.
4 Заключение
В данной статье исследуется форма управления стабилизаторами плавникового типа на нулевой скорости. Два вида форм контроля угла наклона ребра, встречающиеся в существующей литературе, синусоидальная и трапецеидальная формы, изучаются с помощью комбинированного метода теоретического анализа и экспериментального исследования. Сделаны выводы:
- На основе установленной модели силы реакции для стабилизатора ребра при нулевой скорости, силы реакции, создаваемые на ребре под двумя формами управления, сравниваются и анализируются.Предложена концепция коэффициента полупериода для регулирования угла ребра трапецеидальной формы. Установлено, что при одинаковой амплитуде махов сила реакции, создаваемая на лопасти, махнувшем трапециевидной формой с малым коэффициентом полупериода, больше, чем в синусоидальной форме. Хотя время действия силы реакции, создаваемой на лопасти, взмахивающей синусоидальной формой, больше, чем в трапециевидной форме, ее общий эффект меньше, чем трапециевидный, поскольку она создает большую силу только при максимальном наклоне.Таким образом, предварительный результат состоит в том, что форма управления углом трапециевидного ребра с надлежащим малым передаточным числом полупериода больше подходит для стабилизаторов ребра на нулевой скорости.
- Масштабная модель рыболовного судна длиной 84 метра с двумя парами параллелограммных стабилизаторов оперения выбрана в качестве объекта исследования для проведения испытания резервуара с водой для проверки результатов, полученных в результате теоретического анализа. Испытания на принудительную прокатку с ребристыми стабилизаторами имели синусоидальную и трапециевидную формы (с коэффициентом полупериода 0 ~ 0.5) разной амплитуды. Обнаружено, что способность к принудительному качению трапецеидального маховика обычно выше, чем у синусоидального маховика, что согласуется с теоретическим анализом. Способность к принудительному качению возрастает с увеличением амплитуды взмахов лопастей и уменьшением передаточного числа полупериода. Следовательно, ребра должны иметь трапециевидную форму с большой амплитудой взмахов и малым полупериодом для создания большой силы реакции для улучшения демпфирующей способности крена в условиях стоянки.
- На основе результатов испытаний резервуара получены два вида стратегий управления стабилизаторами плавников при нулевой скорости. Однако обнаружено, что эти два метода управления по существу одинаковы с учетом физических ограничений системы приведения в действие стабилизатора плавника. Наконец, стратегия управления для изменения амплитуды взмахов плавников в соответствии с величиной крена корабля получена посредством дальнейшего анализа. Фильтр Калмана используется для прогнозирования следующего пика крена в соответствии со скоростью крена в точке пересечения нуля угла крена для определения следующей амплитуды колебания ребер.В соответствии с полученной логикой управления было проведено испытание модельного бака для уменьшения крена. При выбранной форме и стратегии управления достигается эффект предотвращения перекатывания 70,14%, а эффективность предложенного метода проверяется предварительно. Также было проведено полномасштабное испытание обжатия валков на нулевой скорости. Эффект предотвращения опрокидывания достигает 64,13% в море 4, что дополнительно подтверждает применимость и осуществимость полученной формы и стратегии управления стабилизаторами киля в условиях стоянки на якоре.
Ссылки
- 1. Перес Т., Бланке М. Управление демпфированием крена корабля. Ежегодные обзоры под контролем. 2012. 36 (1): 129–147. https://doi.org/10.1016/j.arcontrol.2012.03.010
- 2. Мартин Г. Стабилизаторы плавников как поверхность управления маневром. Военно-морская аспирантура. 2003.
- 3. Перес Т. Управление движением корабля: выдерживание курса и стабилизация по крену с помощью руля направления и киля. Лондон: Спрингер-Верлаг; 2005.
- 4.Liang LH, Zhao P, Zhang ST. Исследование гидродинамических характеристик крыла винта Magnus на средних / малых скоростях. Международная конференция IEEE по мехатронике и автоматизации, ICMA, 2016 г. 2016: 2413–2418.
- 5. Фанг MC, Ло JH. На отслеживании и уменьшении крена корабля на случайных волнах с помощью различных контроллеров скользящего режима. Океанская инженерия. 2007. 34: 479–488. https://doi.org/10.1016/j.oceaneng.2006.03.004
- 6. Лян Л.Х., Чжао П., Чжан С.Т., Юань Дж., Вэнь Ю.Моделирование и анализ стабилизатора вращающихся валков Magnus на низкой скорости. Океанская инженерия. 2017; 142: 491–500. https://doi.org/10.1016/j.oceaneng.2017.07.012
- 7. Кошкуэй А.Дж., Новак Л. Стабилизация крена корабля с помощью переключаемых контроллеров. Океанская инженерия. 2012; 49: 66–75. https://doi.org/10.1016/j.oceaneng.2012.04.002
- 8. Цзинь Х.З., Яо Х.Л. Теория управления кораблем. 2-е изд. Харбин: издательство Харбинского инженерного университета; 2013.
- 9. Моаледжи Р., Грейг А.Р.О разработке корабельных стабилизаторов поперечной устойчивости. Океанская инженерия. 2007. 34: 103–121.
- 10. Льюис Э.В. Принципы военно-морской архитектуры. 2-е изд. Нью-Джерси: SNAME; 1989.
- 11. Талха М, Асгар Ф, Ким Ш. Разработка нечетко настроенного ПИД-регулятора для стабилизатора гироскопа (ARG) на кораблях. Международный журнал нечетких и интеллектуальных систем. 2017; 17 (3): 210–220. https://doi.org/10.5391/IJFIS.2017.17.3.210
- 12. Fang MC, Zhuo YZ, Lee ZY.Применение самонастраивающегося ПИД-регулятора нейронной сети для уменьшения крена корабля на случайных волнах. Океанская инженерия. 2010; 37: 529–538. https://doi.org/10.1016/j.oceaneng.2010.02.013
- 13. Лян Л.Х., Сан MX, Ши Х.Й., Луан ТТ. Разработайте и проанализируйте новое измерительное подъемное устройство для ребристых стабилизаторов, используя матрицу жесткости балки Эйлера-Бернулли. PLOS ONE. 2017; 12 (1): e0168972. https://doi.org/10.1371/journal.pone.0168972 pmid: 28046122
- 14. Ван Ф, Цзинь Х.З., Ци Ц.Моделирование активных стабилизаторов плавников на нулевой скорости. Океанская инженерия. 2009. 36: 1425–1437. https://doi.org/10.1016/j.oceaneng.2009.07.013
- 15. Даллинга Р.П. Стабилизация крена моторных яхт: использование стабилизаторов плавников в условиях постановки на якорь. 1999.
- 16. Оомс Дж. Использование стабилизаторов крена на нулевой скорости. 2002.
- 17. Джаннини М., Себастьяни Л. Руководство по проектированию активных стабилизаторов поперечной устойчивости в условиях стоянки. 2005 г.
- 18. Джин Х.З., Ван Ф., Ма Л. Метод оценки размеров плавников без использования стабилизаторов плавников. Судостроение Китая. 2011; 52 (2): 1–7.
- 19. Лян Л.Х., Чжао П., Чжан С.Т., Юань Дж. Стратегия управления стабилизатором плавников при нулевой скорости на основе согласования фаз. Журнал Харбинского инженерного университета. 2018; 39 (9): 1539–1545.
- 20. Jin HZ, Qi ZG, Song JG. Устройство и система предотвращения опрокидывания корабля на нулевой скорости. Пекин: Национальная пресса оборонной промышленности; 2015 г.
- 21. Даллинга Р.П., Рапук С. Достоинства ламелей стабилизатора качения. 2014.
- 22. Себастьяни Л., Рускелли Д., Певереро М., Крупи С., Скьяффино Дж., Муцио А., Джаннини М. Проектирование систем стабилизации якоря для мегаяхт на основе расчетов и модельных испытаний. 2005.
- 23. Цзинь Х.З., Чжан XF, Ло Ю.М., Ли Д.С. Разработка адаптивной системы управления для стабилизации плавников на нулевой скорости с использованием улучшенных генетических алгоритмов. Журнал Харбинского инженерного университета.2008. 29 (4): 368–373.
- 24. Ван Ф. Ключевые технологии бионического механизма и управления стабилизатором плавников на нулевой скорости. Харбинский инженерный университет, 2010.
- 25. Сонг Дж. Г., Лян Л. Х., Цзинь Х. З., Ци З. Г.. Адаптивный контроллер ведущий-ведомый для стабилизатора плавникового хода на нулевой скорости. Теория управления и приложения. 2015; 32 (5): 703–708.
- 26. Су XY, Гао Ю.Н., Чжао Р.Х. Конструкция контроллера ориентации по крену для судов на нулевой скорости. Международный журнал нечетких систем.2018; 20 (2): 611–620. https://doi.org/10.1007/s40815-017-0402-2
- 27. Liang LH, Zhao P, Zhang ST, Ji M, Song JG, Yuan J. Моделирование и экспериментальное исследование стратегии управления стабилизатором плавников с нулевой скоростью на основе возмущений и компенсации. PLOS ONE. 2018; 13 (10): e0204446. https://doi.org/10.1371/journal.pone.0204446 pmid: 30273372
- 28. Джи М., Йе Цюй, Ан Н, Ван РВ, Тан Ю.С. Формула динамической подъемной силы, подходящая для низкоскоростного плавника. 2014 Международная конференция IEEE по мехатронике и автоматизации, ICMA.2014: 1757–1761.
- 29. Kong XJ. Исследование стратегии предотвращения перекатывания стабилизатора киля на полной скорости на основе многорежимной технологии. Харбинский инженерный университет. 2017.
- 30. Ji M, Ye QY, Yuan C. Численное моделирование пригодности стабилизаторов киля и корпуса. Китайский журнал корабельных исследований. 2014; 9 (3): 8–19 + 42.
- 31. Song JG, Jin HZ, Meng LW. Оптимальная конструкция крыла стабилизатора киля на всем диапазоне скоростей.Судостроение Китая. 2013; 54 (2): 1–10.
- 32. Toxopeus S, van Walree F, Hallmann R. Испытания на маневрирование и мореходность для 5415M. 2011.
- 33. Конолли Дж. Э. Качание и его стабилизация активными плавниками. Сделка Королевского института военно-морских архитекторов. 1969; 111: 21–48.
(PDF) Обзор стабилизаторов валков и систем для их управления
413
Действия рулевого управления азимутирующие подруливающие устройства и fin
Блоктребует двумерной системы управления
(TITO).«Номинальная» установка и «взвешенный» линейно-квадратичный регулятор частоты
LQR применяются »
для« уменьшения »движения рулона в нерегулярных» волнах. roll
Движение кораблей эффективно уменьшается, когда плавник
и под гребной винт
используются как контрольные приводы на
low скорости.
Нерегулярные волныbyu = 7knплавникикомпенсированы
вращениедвижениедо25%, подпропеллерыдо38% и
оба они достигли 52% амплитуды несущей
стабилизированного
4 РЕЗЮМЕ
Выбор стабилизатора зависит от
«много кораблей» и
рассмотрение миссии.«Большое количество существующих» стабилизаторов
позволяет «найти» стабилизатор для
практически для любой возможной трансмиссии, даже на низкой скорости.
траление на «высокоскоростное преследование». «Вопрос»
, есть ли «стабилизатор» или «нет», зависит «не от»
от «наличия» стабилизаторов. , Однако «Оперативность»
относительно »критерия« некоторого »движения. «Широкое» применение «адаптивного» управления
. Однако явление резонанса
требует, чтобы классический линейныйконтроллерпо теории Минорского
был настроен на частоту. к
естественнойчастоты корабля.
Апотенциальная исследовательская деятельность имеетсистемуконтроля
дизайнсвободныхповерхностных резервуаров, которых «Может» реализовать »адаптацию»
к «изменениям» в «морской» среде, но
«эффективность» этих Относительно низкий.
Посредством «адаптации» настроек PI / PIDконтроллера
может оказаться возможным, что стабилизирующий момент
по этой частоте волны противодействует момент возбуждения
.
Для некоторых судов с изменяющимся в широком диапазоне диапазоном
динамических, это может быть желательно для адаптации
. «Контроллер»
для «новой» собственной частоты »корабля. Для этого значительное количество из
трудностей.
Исследователи в работах посвятили синтезу
систем стохастической стабилизации несмотря на
символов доминирующих нарушений редко прихода
в рамках вероятностного
подхода управления. Похоже, что
использование, например, минимальной дисперсии стратегии
, которая цель состоит в том, чтобы минимизировать
устойчивых выходных отклонений будетоправдано.
можно
использоватьвпредсказательнойформе .
Для управления движением корабля для определенных рабочих условий
, конкретный контроллер
может дать наиболее подходящую производительность. Набор различных
типов контроллеров должен разрабатываться в зависимости от
отразличных скоростей, окружающей средыи морских условий
так, чтобы контроллеры выбираются в
соответствии этимусловиям. Еслиэто
получить удовлетворительные результаты с использованием одного контроллера, он может
превратить
в методы коммутируемого управления, что такое
, реализованное, например, в некоторых устройствах и
интегрированных стабилизаторах вала и руля
Как показывают результаты испытаний, представленные в цитируемых
документах, в «контроле» систем стабилизаторов также могут быть успешно использованы
различных моделей. на базеконтроллеров
например, модельные предсказывающие контроллеры,
, нечеткая логика
и контроллеры искусственных нейронных сетей.В
последних лет были протестированы Линейный Квадратичный Гауссовский
(LQG), а также Цикл Передача Восстановление (LTR)
процедура.
ССЫЛКИ
Agarwal, A.1997. H∞robustcontrolтехнология применялась к
конструкция комбинированной системы рулевого управления / стабилизатора для
военных кораблей. .ShipControlSystemssymposium: 85‐99.
Akaike, H.1994. Статистический анализ и управление динамическими системами
.KluwerAcademicPublishers.
Alarçin, F. 2007. Внутренняя модель управления с использованием нейронной сети
для стабилизации судового поворота
. Journal of Marine
scienceandTechnology .Vol.15, No. 2pp.141-147.
Alarçin, F. & Gulez K. 2007. Стабилизация крена руля для
рыболовных судов с использованием Подход «нейронные» сети. параметры модели корабля основаны на «испытании» поворота
и процедуре «возврата»
. Ocean
Engineering32.: 1350‐1369.
Chadwick, J.1955. О «стабилизации» рулона. SnameTrans.
Vol.63: 234-280.
Холодин, & А.Н., Шмырев, AN 1972. Мореходность I
стабилизациясудовнаволнения.Судостроение
Cowley, JB & LambertTH1972. Использованиерука как
rollstabilize. Протоколы
3-й Системы управления судном
Симпозиум Том 2 Ванна.
Crossland, P. 2003. Эффект стабилизации крена
контроллеровна боевые эксплуатационные характеристики. Control
EngineeringPractice11: 423-431 .
Fang, M. ‐ C. & Luo, J. ‐ H. 2006. «Применение» контроллера
скользящего режима на корабле «Уменьшение» в & Luo, J.K.2007.Натреке ведениеи рулона
сокращение корабля в случайных волнахиспользовании различных
контроллеров скользящегорежимаОкеанИнжиниринг 34: 479–488.
Fang, MC & ZhuoYZ & LeeZY2010. Приложение
самонастраивающаяся нейронная сеть ПИД-регулятор на корабле
, сокращение на случайных волнах. Океанское инженерное дело
37: 529–538.
Frahm, H. «Судебные испытания» противокатковых танков на море.
Транзакции Учреждения Военно-морской архитектуры, 53: 193-
201
Jin, H. & QiZ. и Zhou T. &
LiD. 2008. Исследования on roll
стабилизации для судов на якоре. Journal Marine Sci.
Applications, 7: 248‐254.
Klugt, P. G. M. van der. 1987 стабилизация крена руля …
PhD Thesis. VanRietschoten and Houwens BV,
Rotterdam .
Кула, К. 2014. «Каскадная система управления» стабилизаторами плавников.
19-я Международная конференция по методам и
Модели в
Автоматизация и Робототехника. IEEE
10.11109 / MMAR2014: 868-873.
Law, Y. & Koshkouei AJ & Burnham KJ 2005. A
сравнение систем управления для корабль рулон
стабилизация. SystemsScience Vol.31, no2: 77-87.
Lee, S. & Rhee K.P. & Choi JW 2011. Конструкция контроллера стабилизации
, с использованием плавниковых стабилизаторов и подса
гребных винтов ПрикладныеОкеанскиеИсследования33 : 229 – 239.
Minorski, N.1922.Направленнаяустойчивостьавтоматически управляемых
кузовов.NavalEng.Journal34 (2): 280– 309.
Идеальное решение для уменьшения качения!
VETUS с гордостью представляет РОЛИК-СТАБИЛИЗАТОР
- Установка Plug and Play для стальных, георадарных и алюминиевых емкостей
- Значительно уменьшает тангаж и крен
- Доступен как отдельная система
- Простота установки в существующую гидравлическую систему
- Автоматическое центрирование
- Полностью автоматический режим
- Движение плавников автоматически регулируется в зависимости от выбранной степени демпфирования, скорости судна и состояния моря
- Все электронные компоненты твердотельные
- Также подходит для проектов переоборудования
Что такое стабилизаторы плавников?
Стабилизаторы плавников — это плавники, установленные под ватерлинией яхты, которые устанавливаются с обеих сторон судна под углом вниз.Ребра стабилизатора VETUS управляются компьютером и имеют возможность изменять свой угол с помощью гидравлической системы, чтобы противодействовать крену, вызванному волнами или ветром.
Что делают стабилизаторы?
Стабилизаторы VETUS значительно снижают перекатываемость, что обеспечивает комфорт, стабильное рулевое управление даже при использовании автопилота и снижает риск морской болезни.
Моторные яхты длиной более 10 метров часто используются в открытых водах. Стабилизаторы VETUS — идеальное решение для значительного уменьшения качения этих судов в плохую погоду или при сильных волнах.
СтабилизаторыVETUS состоят из пары стабилизаторов с гидравлическим приводом, которые устанавливаются на левую и правую части миделя судна под водой. Они управляются бортовым гироскопом и автоматически реагируют на качение судна, создавая эффект демпфирования.
Основные преимущества
- Повышение комфорта, устойчивости на автопилоте и снижение риска морской болезни
- В дождь или в ясную погоду, вы будете использовать лодку чаще
- Более высокая стоимость лодки
Могу ли я добавить к моей лодке стабилизаторы VETUS?
СтабилизаторыVETUS разработаны для лодок длиной от 10 до 23 м для уменьшения качения в плохую погоду или при сильных волнах.Член группы поддержки клиентов VETUS доступен для вас по электронной почте бесплатно, чтобы обсудить конфигурацию вашего судна и варианты.
Вы получите наши рекомендации по вашей системе стабилизатора в течение 48 часов после получения и окончательной обработки всей информации.
VETUS также может спроектировать и поставить полную гидравлическую систему, если это необходимо.
Загрузите полную брошюру ЗДЕСЬ!
Варианты установки
Доступен как отдельная система
— Подключен к гидравлическому насосу с ременным приводом с опорой подшипника и шкивом
или
— Подключен к гидравлическому насосу, установленному на валу отбора мощности SAE-A на двигателе или коробке передач
Наши стабилизаторы также легко интегрируются в существующие системы
— Добавив гидравлический блок управления VETUS (HT1024) между текущей гидравлической системой
и стабилизаторами VETUS
Как выбрать правильный стабилизатор для вашей лодки
За последние несколько лет стабилизация крена стала обязательной для владельцев лодок из-за впечатляющего повышения комфорта, которое она обеспечивает.Современные системы резкого уменьшения крена также повышают безопасность на борту и, как следствие, позволяют многим семьям более эффективно использовать свои лодки.
Основные моменты, которые следует учитывать при выборе стабилизатора
Не всегда так ясно, какой тип системы стабилизации выбрать, потому что две ведущие технологии (плавники и гироскопы) имеют значительные функциональные различия, а это означает, что ни один тип не подходит для всех лодок или всех крейсерских приоритетов владельцев.
- Выберите подходящую технологию стабилизации, соответствующую типу вашей лодки.
- Проверьте практические ограничения вашей лодки — не все системы подходят ко всем лодкам, в основном из-за нехватки места.
- Подумайте, что лучше всего подходит для вашей лодки и что, вероятно, сохранит наибольшую ценность, когда придет время продавать — лодки некоторых размеров и стиля больше склоняются к одной технологии, чем к другой.
Подробнее: Что такое морские стабилизаторы и для чего они нужны? →
Основные сведения
Стабилизация — сложная тема, которая часто не до конца понимается даже профессионалами судостроительной отрасли.Чтобы убедиться, что вы получите правильную технологию стабилизации для вашей лодки, самое важное, что нужно понимать, — это то, что производительность любой системы всегда ограничена. Он ограничен фактическими силами, которые стабилизатор может создать для «борьбы» с силой крена, которую волна прилагает к лодке.
Также помните, что силы крена зависят не только от высоты волны, но и от времени, в течение которого они воздействуют на лодку (длины волны). Еще один важный фактор — скорость лодки из-за фундаментального закона физики; force = speed2.Число, которое следует искать, — это Ньютон-метр-секунда, поскольку оно отражает общую силу по всей волне и крену с любой скоростью.
Подробнее: Стабилизаторы векторных ребер в сравнении с стабилизаторами с плоскими ребрами →
Стабилизаторы гироскопического типа устанавливаются внутри лодки и получают свою общую силу уменьшения крена за счет прецессионного движения, которое они создают для сопротивления крену лодки. Это также означает, что они имеют одинаковую общую силу независимо от периода волн и скорости лодки; когда прецессионное движение достигает конца своего пути, в этом направлении больше нет силы.
Ребристые стабилизаторы действуют в воде и имеют два способа создания силы уменьшения крена в зависимости от скорости лодки. При нулевой скорости или режиме «на якоре» плавники быстро вращаются (закрылки) для создания силы и, как гироскоп, имеют определенный предел и останавливаются, когда достигают конца своего пути.
Однако, когда лодка движется вперед, плавники также создают силы уменьшения крена за счет угла, под которым они проходят через воду, как регулируемые крылья самолета или подводные крылья.Эта сила увеличивается пропорционально квадрату скорости, поэтому чем быстрее движется лодка, тем больше силы она создает. Что особенно важно, они могут удерживать эту силу, пока лодка движется вперед.
Сила, создаваемая на разных скоростях гироскопом, плоскими килями и изогнутыми плавниками Vector в стандартной 75-футовой глиссирующей моторной яхте, ясно показана на приведенном выше графике.
Какая система вам подходит?
Если ваш единственный приоритет — стабилизация на нулевой скорости, при выборе этого размера гироскоп будет устранять большее кренение, чем плавники при закреплении.Однако, если вы также используете свою лодку в более длительных круизах и хотите иметь отличную стабилизацию при плавании в открытом море между защищенными якорными стоянками, ласты имеют колоссальное преимущество по силе. Они могут во много раз уменьшить или устранить высоту волны и длину гироскопа такого размера.
Вы, конечно, можете выбрать гироскоп побольше (или несколько меньших), чтобы увеличить крейсерские возможности, но тогда размер и вес действительно начинают оказывать влияние — чтобы соответствовать плавникам на восьми узлах, вам нужно более чем в четыре раза увеличить размер гироскопа.В качестве альтернативы вы можете выбрать плавники большего размера, чтобы соответствовать характеристикам гироскопа на нулевой скорости. Исторически причиной того, что этого не делали, было дополнительное сопротивление со стороны больших плавников, вызывающее потерю скорости и повышенный расход топлива, но теперь это изменилось с введением изогнутых плавников Vector.
