Как подключить драйвер L293D к Arduino. Какие компоненты необходимы для работы с L293D. Как настроить и запрограммировать управление двигателями через L293D. Какие преимущества дает использование L293D в проектах с Arduino.
Что такое драйвер двигателя L293D и зачем он нужен
L293D — это популярный драйвер двигателя, который часто используется в проектах с Arduino для управления электродвигателями постоянного тока и шаговыми двигателями. Но почему нельзя просто подключить двигатель напрямую к Arduino?
Дело в том, что выводы Arduino имеют ограничение по току — всего 40 мА на пин. Этого недостаточно даже для небольшого двигателя. L293D решает эту проблему, позволяя управлять двигателями с током до 600 мА на канал.
Кроме того, L293D содержит два H-моста, что позволяет контролировать не только скорость, но и направление вращения двигателей. Это открывает широкие возможности для создания подвижных роботов и других механизмов на базе Arduino.

Основные характеристики драйвера L293D
Перед подключением важно знать ключевые параметры L293D:
- Напряжение питания: 4.5-36В
- Максимальный ток: 600 мА на канал
- Пиковый ток: до 1.2А на канал
- Два независимых H-моста
- Возможность управления 4 DC или 2 шаговыми двигателями
- Встроенные защитные диоды
Такие характеристики делают L293D универсальным решением для большинства любительских проектов с Arduino и двигателями.
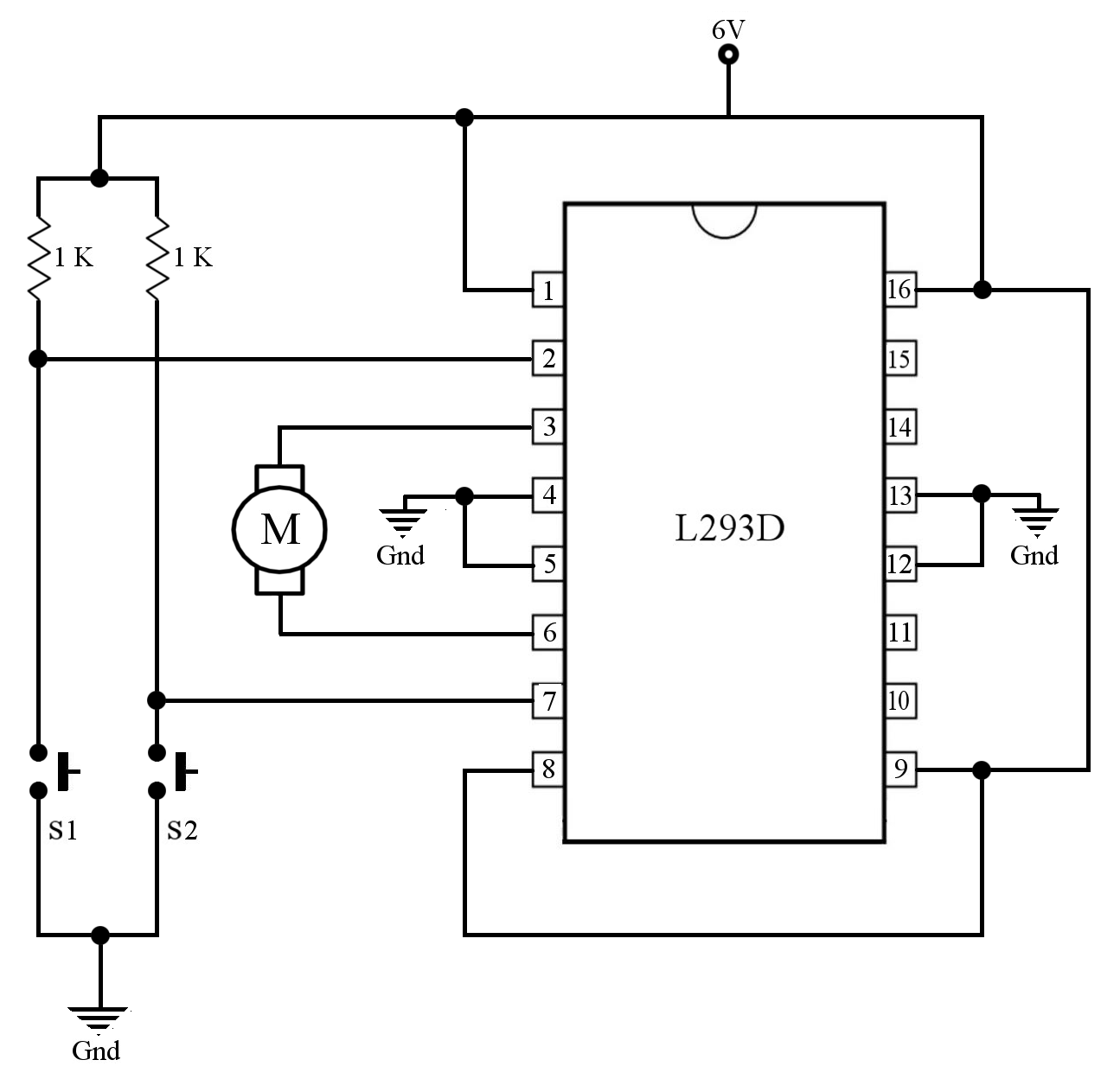
Распиновка микросхемы L293D
L293D имеет 16 выводов. Ниже представлена их распиновка:
- Выводы 1, 9, 16 — Enable входы
- Выводы 2, 7, 10, 15 — Input входы
- Выводы 3, 6, 11, 14 — Output выходы
- Выводы 4, 5, 12, 13 — GND
- Вывод 8 — Vcc1 (логическое питание)
- Вывод 16 — Vcc2 (силовое питание двигателей)
Понимание назначения выводов критически важно для правильного подключения драйвера к Arduino и двигателям.
Схема подключения L293D к Arduino
Для базового подключения L293D к Arduino и одному двигателю постоянного тока потребуется:
- Соединить GND Arduino и L293D
- Подать 5В с Arduino на Vcc1 (вывод 16) L293D
- Подключить выводы Enable1 (1) и Enable2 (9) к 5В
- Соединить Input1 (2) и Input2 (7) с цифровыми пинами Arduino
- Подключить двигатель к Output1 (3) и Output2 (6)
- Подать питание двигателя на Vcc2 (8) L293D
Такая схема позволит управлять скоростью и направлением вращения двигателя с помощью Arduino.
Программирование Arduino для работы с L293D
После подключения необходимо запрограммировать Arduino для управления двигателем через L293D. Вот простой пример кода:
«`cpp // Определяем пины для подключения const int motorPin1 = 2; // Input1 на L293D const int motorPin2 = 3; // Input2 на L293D const int enablePin = 9; // Enable1 на L293D void setup() { // Настраиваем пины как выходы pinMode(motorPin1, OUTPUT); pinMode(motorPin2, OUTPUT); pinMode(enablePin, OUTPUT); } void loop() { // Вращение в одну сторону digitalWrite(motorPin1, HIGH); digitalWrite(motorPin2, LOW); // Устанавливаем скорость analogWrite(enablePin, 200); // ШИМ от 0 до 255 delay(2000); // Ждем 2 секунды // Вращение в другую сторону digitalWrite(motorPin1, LOW); digitalWrite(motorPin2, HIGH); delay(2000); // Ждем 2 секунды // Останавливаем двигатель digitalWrite(motorPin1, LOW); digitalWrite(motorPin2, LOW); delay(1000); // Пауза перед следующим циклом } «`
Управление скоростью вращения с помощью ШИМ
Одно из преимуществ использования L293D — возможность регулировать скорость вращения двигателя. Это достигается с помощью широтно-импульсной модуляции (ШИМ) на входе Enable.В Arduino для этого используется функция analogWrite(), которая принимает значения от 0 (двигатель остановлен) до 255 (максимальная скорость). Например:
«`cpp analogWrite(enablePin, 128); // Устанавливаем половинную скорость «`Изменяя значение ШИМ, можно плавно регулировать скорость вращения двигателя.
Подключение нескольких двигателей
L293D позволяет управлять до 4 двигателей постоянного тока или 2 шаговыми двигателями. Для подключения дополнительных двигателей используются оставшиеся выходы микросхемы:
- Второй двигатель: Output3 (11) и Output4 (14)
- Третий и четвертый двигатели: при использовании второй L293D
При подключении нескольких двигателей важно правильно распределить нагрузку и обеспечить достаточное питание.
Типичные ошибки при работе с L293D
При использовании L293D новички часто допускают следующие ошибки:
- Неправильное подключение питания: Vcc1 должен быть подключен к 5В логики, а Vcc2 — к питанию двигателей
- Превышение максимального тока: использование двигателей, потребляющих более 600 мА
- Забывают подключить Enable входы: без этого двигатели не будут вращаться
- Неправильная полярность подключения двигателей: может привести к неожиданному поведению
- Отсутствие развязки питания: может вызвать помехи в работе Arduino
Избегая этих ошибок, вы сможете эффективно использовать L293D в своих проектах.
Альтернативы L293D
Хотя L293D отлично подходит для многих проектов, в некоторых случаях могут потребоваться альтернативные решения:
- L298N: поддерживает более высокие токи (до 2А на канал)
- TB6612FNG: более эффективен и меньше нагревается
- DRV8833: компактное решение для малых токов
- A4988: специализированный драйвер для шаговых двигателей
Выбор драйвера зависит от конкретных требований проекта: необходимого тока, напряжения, типа двигателей и других факторов.
Пример 35. Плата расширения для двигателей на L293D [База знаний]
#include <AFMotor.h> // Подключаем библиотеку для работы с шилдом
// Подключаем моторы к клеммникам M1, M2, M3, M4
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
//счетчик
int i;
void setup() {
// Задаем скорость вращения моторов (аналог работы PWM)
motor1.setSpeed(100);
motor1.run(RELEASE);
motor2.setSpeed(100);
motor2.run(RELEASE);
motor3.setSpeed(100);
motor3.run(RELEASE);
motor4.setSpeed(100);
motor4.run(RELEASE);
}
void loop() {
// Двигаемся условно вперед одну секунду
motor1.run(FORWARD); // Задаем движение вперед
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
motor1.setSpeed(100); // Задаем скорость движения
motor2.setSpeed(100);
motor3. setSpeed(100);
setSpeed(100);
motor4.setSpeed(100);
delay(1000);
// Останавливаем двигатели
/* Очень не рекомендуем резко переключать направление вращения двигателей.
Лучше дать небольшой промежуток времени.*/
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
delay(500);
// Двигаемся в обратном направлении
motor1.run(BACKWARD); // Задаем движение назад
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
motor1.setSpeed(100); // Задаем скорость движения
motor2.setSpeed(100);
motor3.setSpeed(100);
motor4.setSpeed(100);
delay(1000);
// Останавливаем двигатели
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
delay(500);
// Разгоняем двигатели в одном направлении
motor1. run(FORWARD);
run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
for (i=0; i<255; i++) {
motor1.setSpeed(i);
motor2.setSpeed(i);
motor3.setSpeed(i);
motor4.setSpeed(i);
delay(10);
}
// Останавливаем двигатели
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
delay(500);
// Разгоняем двигатели в обратном направлении
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
for (i=255; i>=0; i—) {
motor1.setSpeed(i);
motor2.setSpeed(i);
motor3.setSpeed(i);
motor4.setSpeed(i);
delay(10);
}
// Останавливаем движение
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
delay(500);
}
Драйверы двигателя L298N, L293D и Arduino Motor Shield | АмперКО
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели.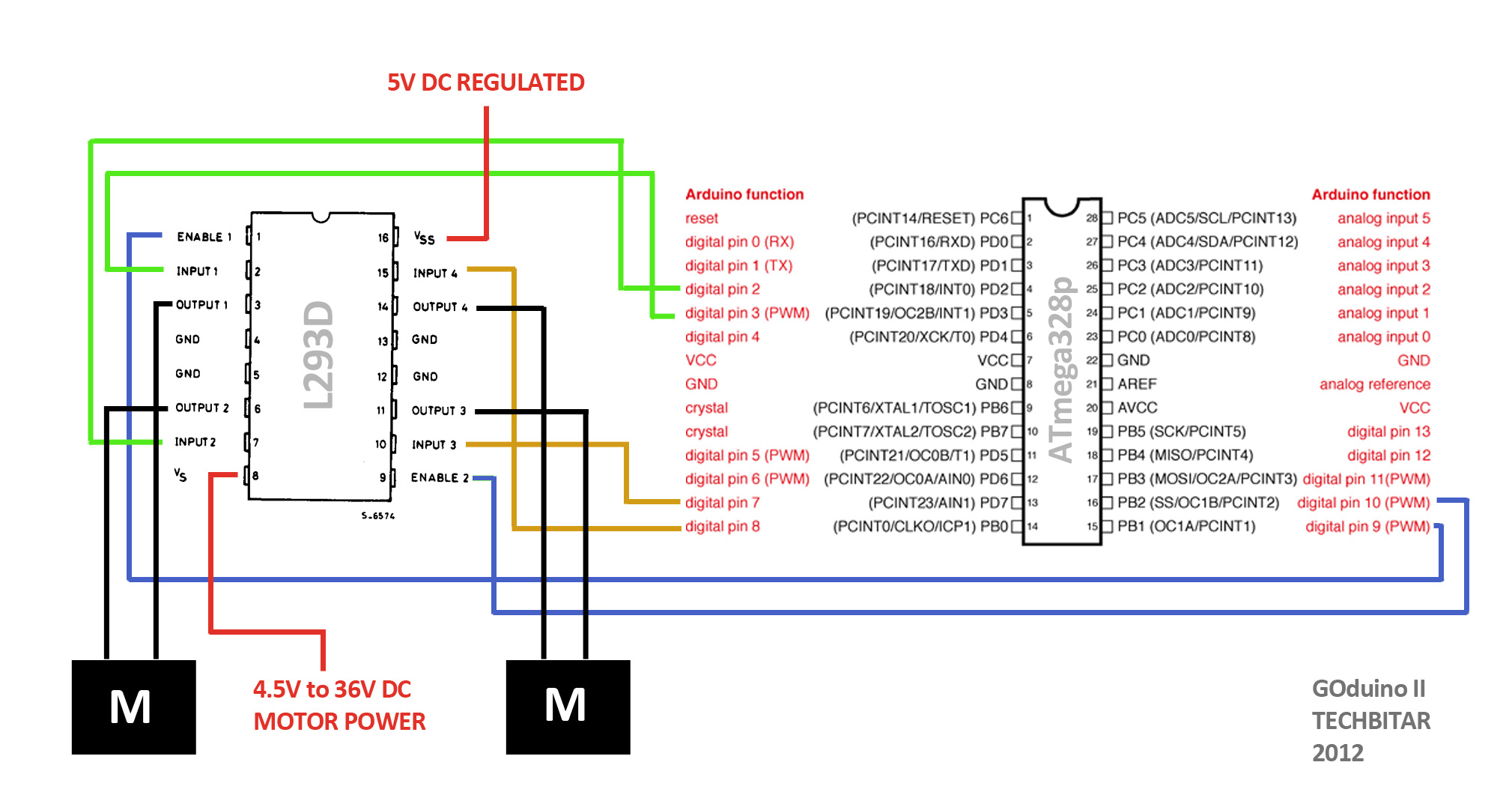 C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей.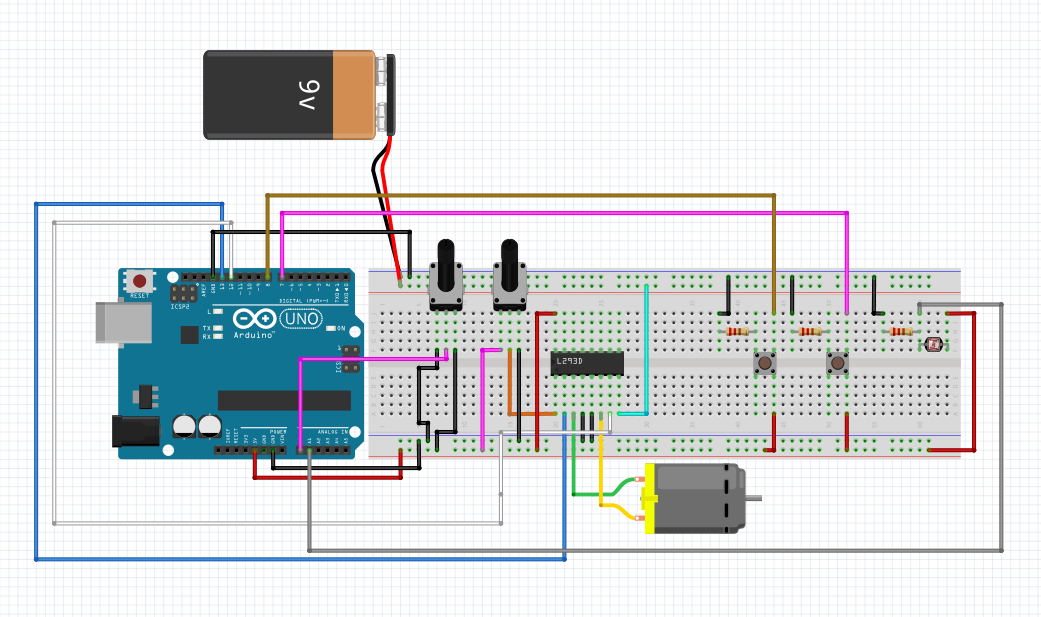 Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:
Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами.
 Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).
Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).
При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.

Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.
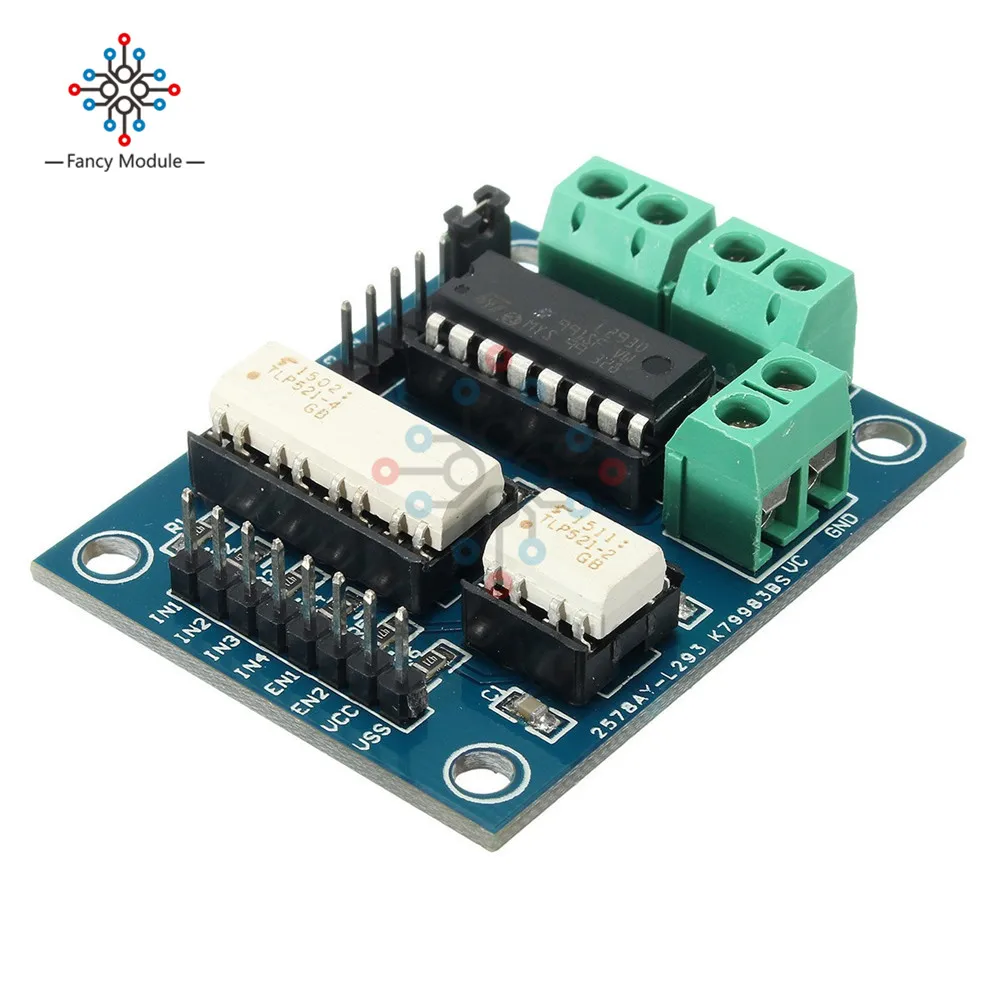
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения.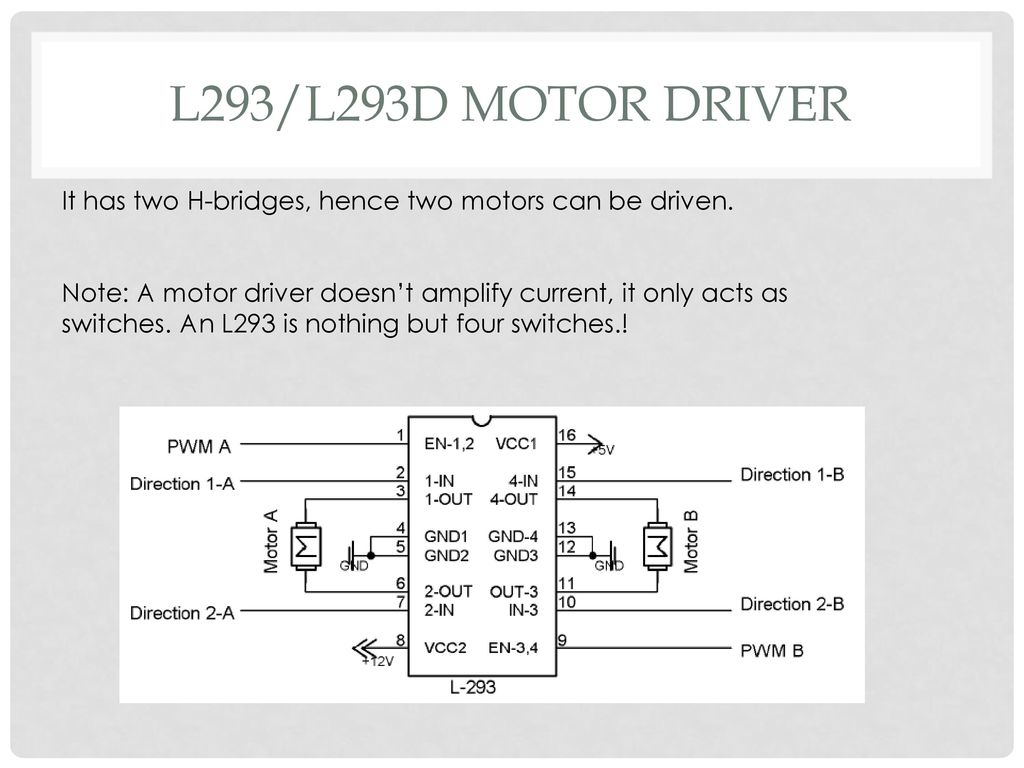 Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
Arduino motor control shield l293d распиновка подключение
Опубликовано 13.12.2013 13:10:00
В статье рассмотрим устройство Motor Shield’а, разработанного компанией Adafruit, а также научимся управлять с его помощью различными типами двигателей.
Данная плата позволит подключить одновременно к Arduino до четырех коллекторных DC двигателей, либо до двух биполярных шаговых двигателей. К тому же на плате имеются разъемы для подключения двух сервоприводов.
Компоненты для повторения (купить в Китае):
На борту данного шилда имеется две микросхемы L293D (1). L-ка позволяет управлятьслаботочными двигателями с током потребления до 600 мА на канал. На двух пятипиновыхклеммниках (2) можно насчитать 4 разъема для подключения двигателей (M1, M2, M3, M4),центральные выводы на пятипиновых клеммниках соединены с землей и служат для удобствапри подключении пятипроводных шаговый двигателей.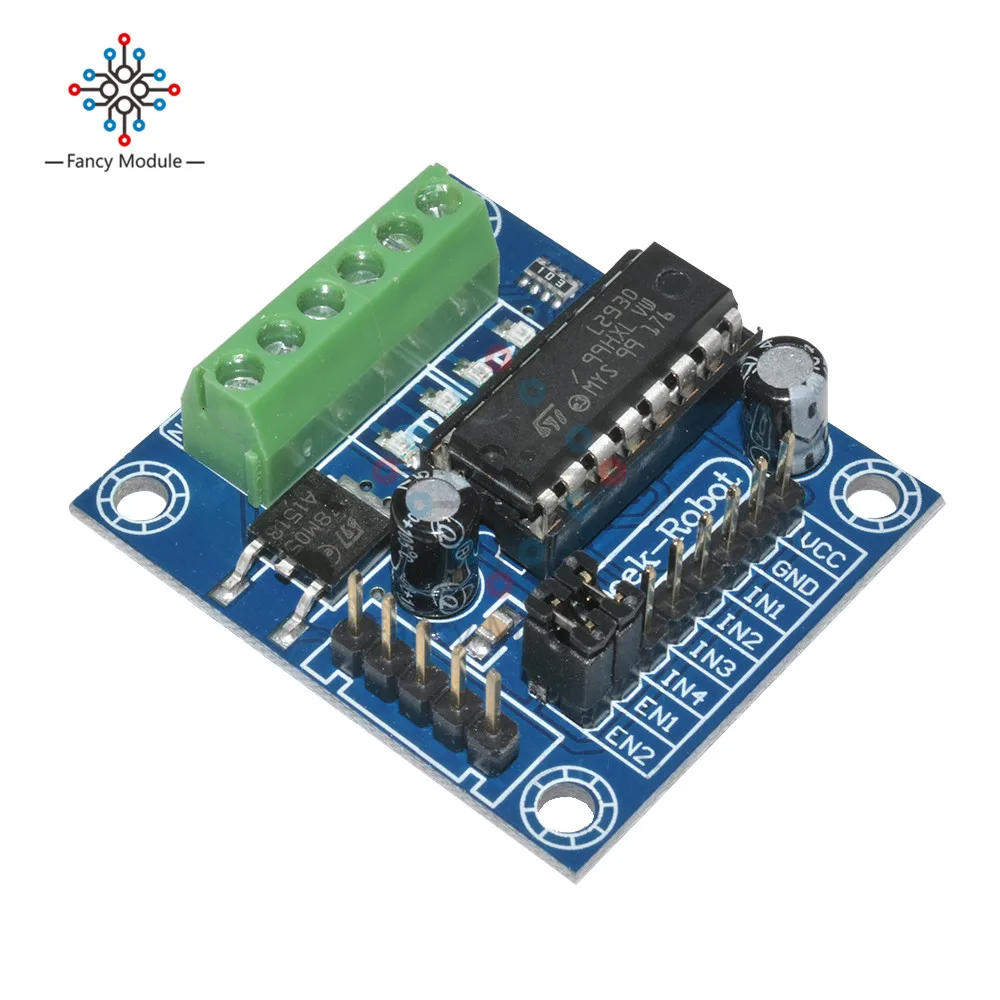
К явным минусам данного шилда можно отнести то, что он задействует практически все цифровые пины:
Выводы, отвечающие за скорость вращения двигателей
Цифровой вывод 11- DC Мотор №1 / Шаговый №1
Цифровой вывод 3- DC Мотор №2 / Шаговый №1
Цифровой вывод 5- DC Мотор №3 / Шаговый №2
Цифровой вывод 6- DC Мотор №4 / Шаговый №2
Выводы, отвечающие за выбор направления вращения двигателей:
Цифровые выводы 4, 7, 8 и 12
Выводы для управления сервоприводами (выведены на штырьки на краю платы):
Цифровой вывод 9- Сервопривод №1
Цифровой вывод 10- Сервопривод №2
В итоге незадействованными цифровыми выводами остаются только пины 2, 13 и пины интерфейса UART- 0, 1.
Однако есть выход из данной ситуации. У нас остались незадействованные аналоговые входы A0-A6, их можно использовать как цифровые. В коде они будут записываться как цифровые с 14 по 19.
Библиотека необходимая для работы с модулем AFMotor.h
Её необходимо распаковать и добавить в папку «libraries» в папке с Arduino IDE. Не забывайте перезагрузить среду, если на момент добавления IDEшка была открыта.
Втыкаем шилд в плату, подключаем моторы и поехали!
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки.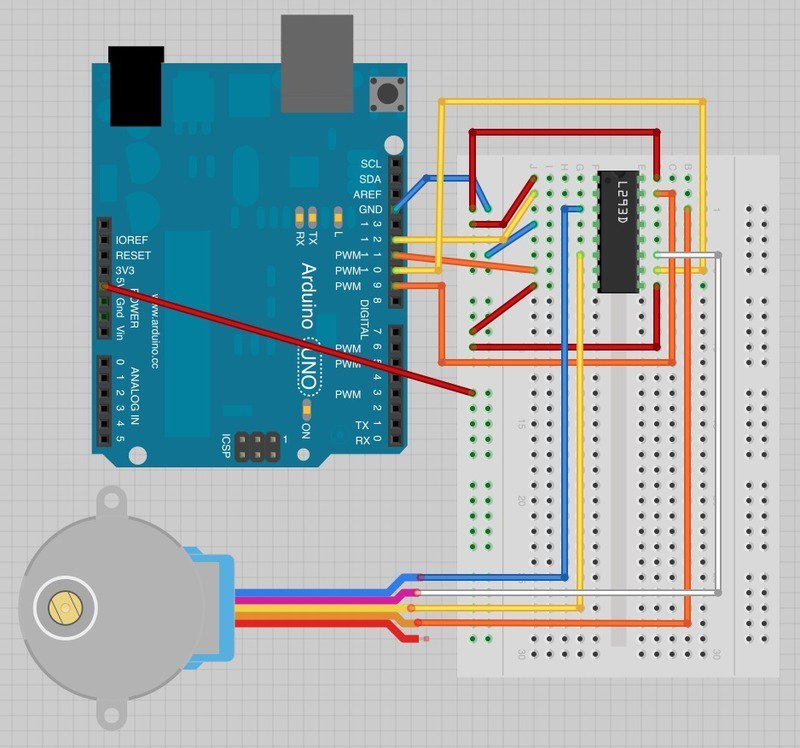 Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя.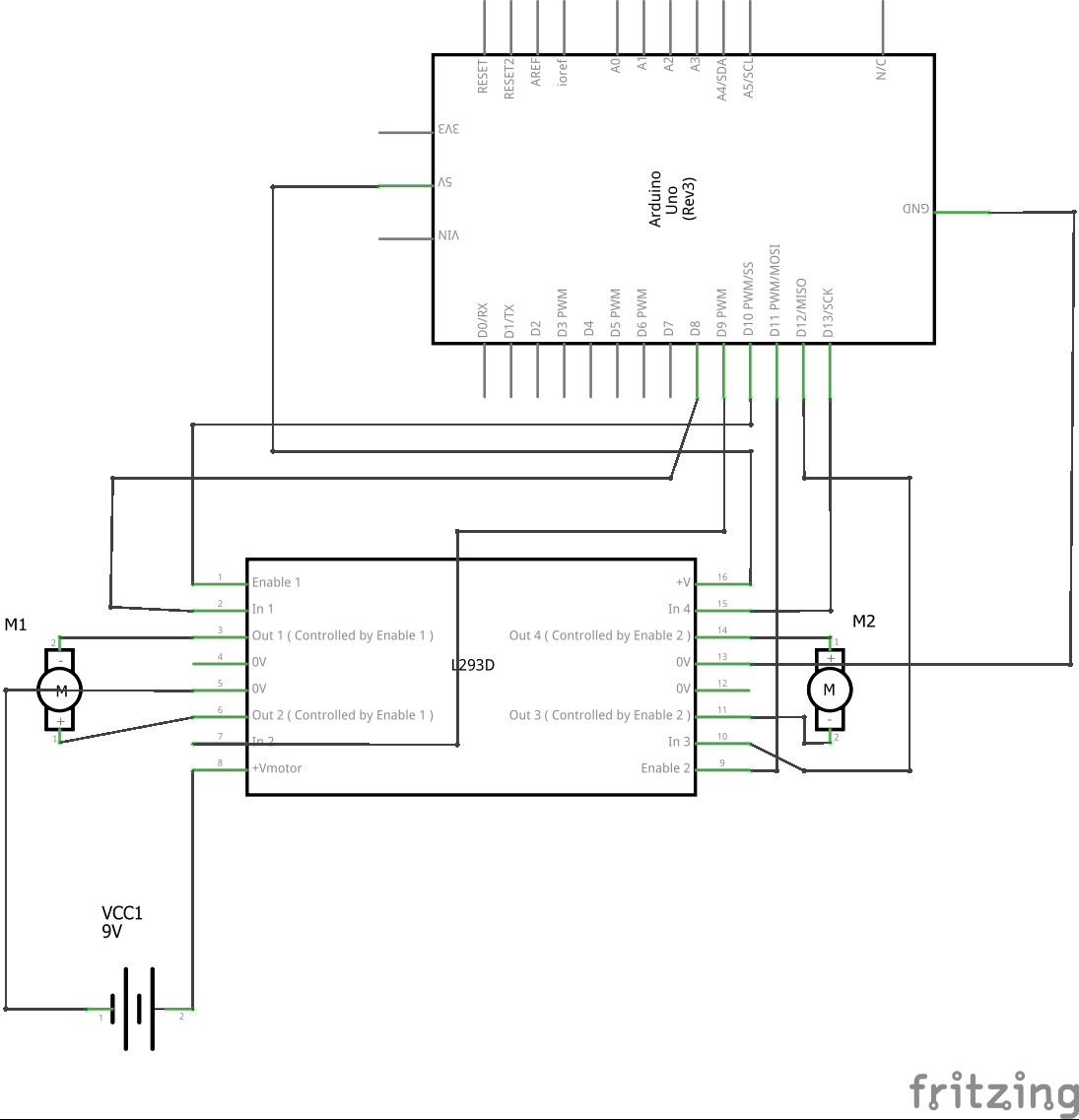 Но для смены направления вращения этот способ не подойдет.
Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника.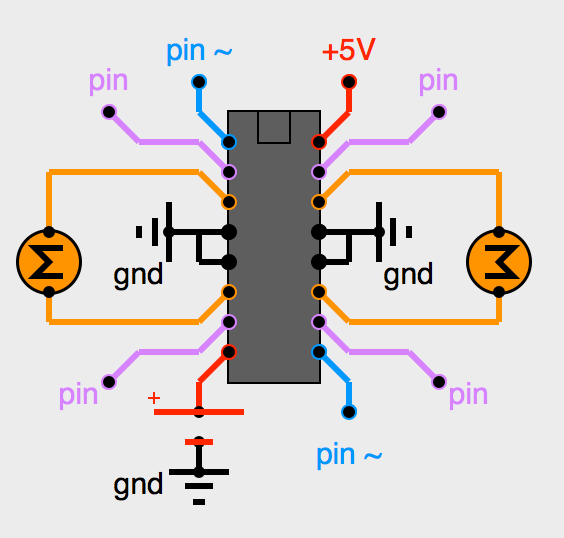 На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 1 | Поворот мотора вправо | ||
| 1 | 1 | Поворот мотора влево | ||
| Свободное вращение | ||||
| 1 | 1 | Торможение | ||
| 1 | 1 | Торможение | ||
| 1 | 1 | Короткое замыкание | ||
| 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:
Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).
При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.
Пример подключения одного двигателя к Ардуино показан на рисунке.
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| Остановка | ||
| 1 | Двигается вперед | |
| 1 | Двигается назад | |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей.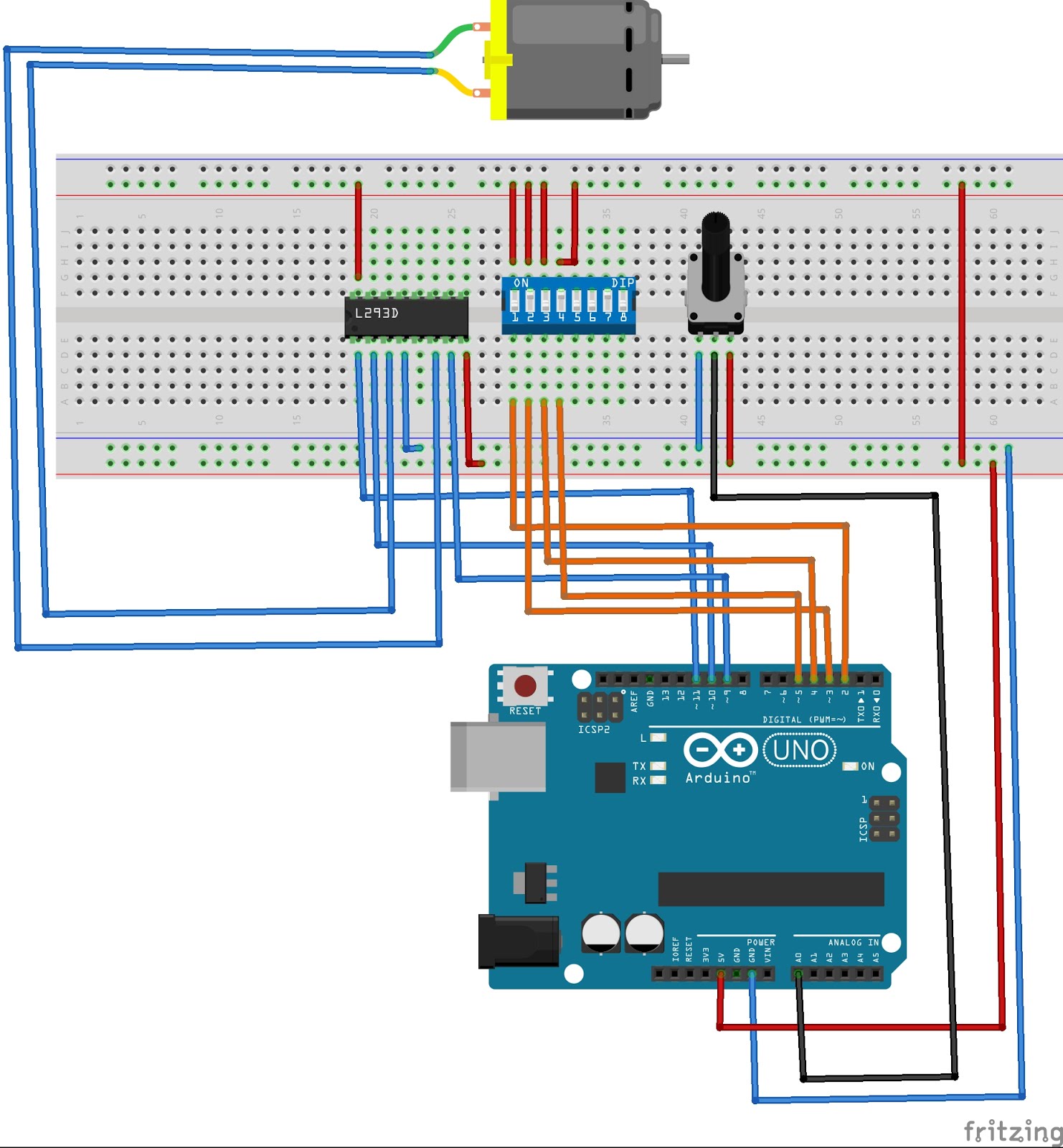 Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены
. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution.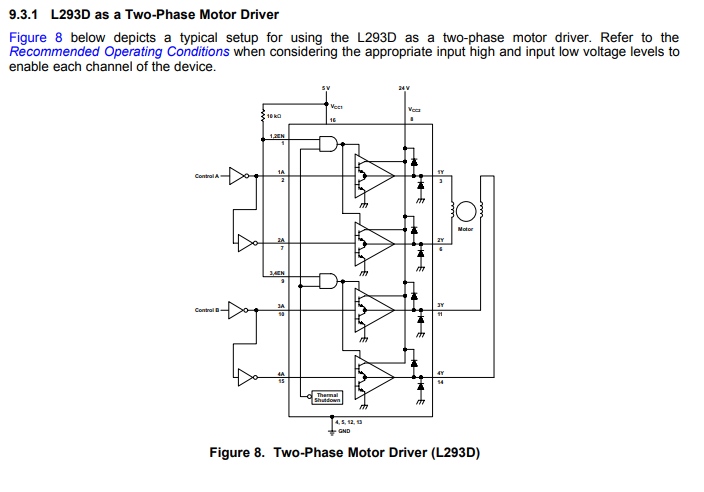 При правильной сборке вал двигателя начнет вращаться.
При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
Опубликовано 13.12.2013 13:10:00
В статье рассмотрим устройство Motor Shield’а, разработанного компанией Adafruit, а также научимся управлять с его помощью различными типами двигателей.
Данная плата позволит подключить одновременно к Arduino до четырех коллекторных DC двигателей, либо до двух биполярных шаговых двигателей. К тому же на плате имеются разъемы для подключения двух сервоприводов.
Компоненты для повторения (купить в Китае):
На борту данного шилда имеется две микросхемы L293D (1). L-ка позволяет управлятьслаботочными двигателями с током потребления до 600 мА на канал. На двух пятипиновыхклеммниках (2) можно насчитать 4 разъема для подключения двигателей (M1, M2, M3, M4),центральные выводы на пятипиновых клеммниках соединены с землей и служат для удобствапри подключении пятипроводных шаговый двигателей. Использование двух микросхем L293D позволяет одновременно подключить 4 моторчика постоянного тока либо 2 шаговых моторалибо два моторчика и шаговый. Для управления на прямую выводами L-ки (IN1, IN2, IN3, IN4),отвечающимими за выбор направления вращения, необходимо 4 вывода, а для двух микросхемцелых 8. Для уменьшения количества управляющих выводов в игру вступает сдвиговый регистр74НС595 (3). Благодаря регистру управление сводится с 8ми пинов к 4ем.Также, на плату выведены 2 разъема для подключения сервоприводов (4). Управлениесервоприводами стандартное с помощью библиотеки Servo.h и никак не связано с библиотекойкоторую мы будем рассматривать далее.Питание силовой части производится либо от внешнего клеммника (6) либо замыканиемджампера (5) ( питание от клеммника моторов +M соединяется с выводом Vin Arduino).
На двух пятипиновыхклеммниках (2) можно насчитать 4 разъема для подключения двигателей (M1, M2, M3, M4),центральные выводы на пятипиновых клеммниках соединены с землей и служат для удобствапри подключении пятипроводных шаговый двигателей. Использование двух микросхем L293D позволяет одновременно подключить 4 моторчика постоянного тока либо 2 шаговых моторалибо два моторчика и шаговый. Для управления на прямую выводами L-ки (IN1, IN2, IN3, IN4),отвечающимими за выбор направления вращения, необходимо 4 вывода, а для двух микросхемцелых 8. Для уменьшения количества управляющих выводов в игру вступает сдвиговый регистр74НС595 (3). Благодаря регистру управление сводится с 8ми пинов к 4ем.Также, на плату выведены 2 разъема для подключения сервоприводов (4). Управлениесервоприводами стандартное с помощью библиотеки Servo.h и никак не связано с библиотекойкоторую мы будем рассматривать далее.Питание силовой части производится либо от внешнего клеммника (6) либо замыканиемджампера (5) ( питание от клеммника моторов +M соединяется с выводом Vin Arduino).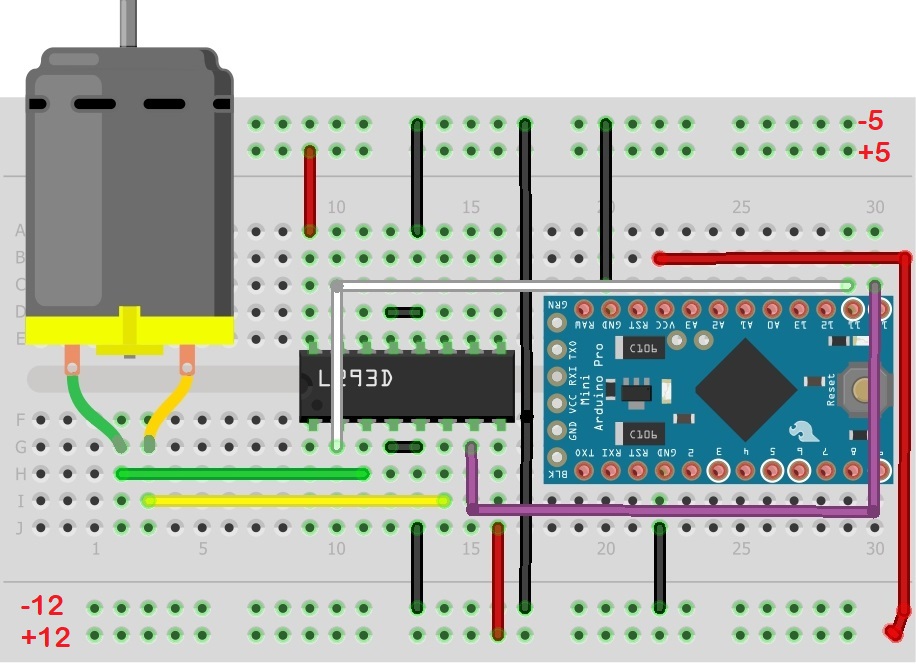 При замкнутом джампере напряжение для объединенного питания должно лежать в пределах от 6 до 12Вольт
При замкнутом джампере напряжение для объединенного питания должно лежать в пределах от 6 до 12Вольт
К явным минусам данного шилда можно отнести то, что он задействует практически все цифровые пины:
Выводы, отвечающие за скорость вращения двигателей
Цифровой вывод 11- DC Мотор №1 / Шаговый №1
Цифровой вывод 3- DC Мотор №2 / Шаговый №1
Цифровой вывод 5- DC Мотор №3 / Шаговый №2
Цифровой вывод 6- DC Мотор №4 / Шаговый №2
Выводы, отвечающие за выбор направления вращения двигателей:
Цифровые выводы 4, 7, 8 и 12
Выводы для управления сервоприводами (выведены на штырьки на краю платы):
Цифровой вывод 9- Сервопривод №1
Цифровой вывод 10- Сервопривод №2
В итоге незадействованными цифровыми выводами остаются только пины 2, 13 и пины интерфейса UART- 0, 1.
Однако есть выход из данной ситуации. У нас остались незадействованные аналоговые входы A0-A6, их можно использовать как цифровые.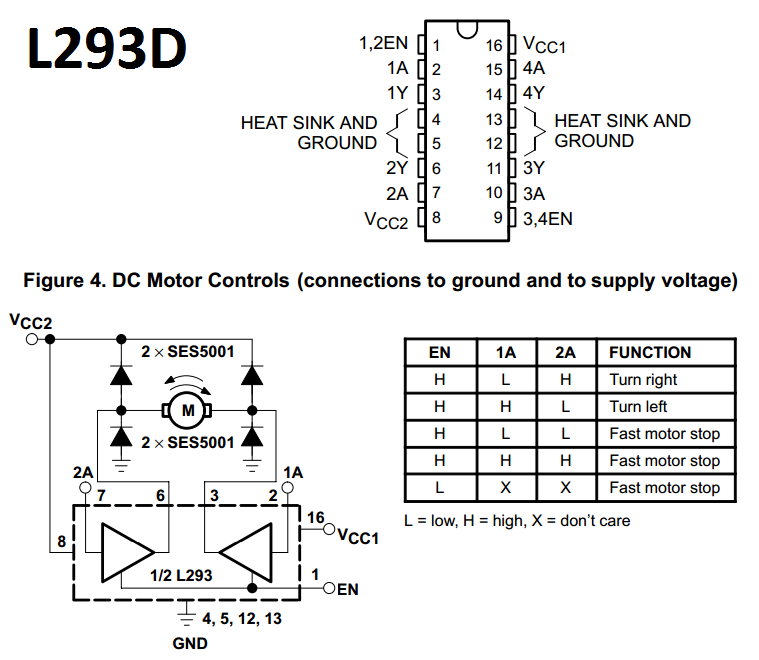 В коде они будут записываться как цифровые с 14 по 19.
В коде они будут записываться как цифровые с 14 по 19.
Библиотека необходимая для работы с модулем AFMotor.h
Её необходимо распаковать и добавить в папку «libraries» в папке с Arduino IDE. Не забывайте перезагрузить среду, если на момент добавления IDEшка была открыта.
Втыкаем шилд в плату, подключаем моторы и поехали!
Плата расширения для двигателей L293D для Arduino — RadioMart.kz
На борту данного шилда имеется две микросхемы L293D (1). L-ка позволяет управлять слаботочными двигателями с током потребления до 600 мА на канал. На двух пятипиновых клеммниках (2) можно насчитать 4 разъема для подключения двигателей (M1, M2, M3, M4),центральные выводы на пятипиновых клеммниках соединены с землей и служат для удобствапри подключении пятипроводных шаговый двигателей. Использование двух микросхем L293D позволяет одновременно подключить 4 моторчика постоянного тока либо 2 шаговых моторалибо два моторчика и шаговый. Для управления на прямую выводами L-ки (IN1, IN2, IN3, IN4),отвечающимими за выбор направления вращения, необходимо 4 вывода, а для двух микросхем целых 8. Для уменьшения количества управляющих выводов используется сдвиговый регистр74НС595 (3). Благодаря регистру управление сводится с 8-ми пинов к 4-ем. Также, на плату выведены 2 разъема для подключения сервоприводов (4). Управление сервоприводами стандартное с помощью библиотеки Servo.h Питание силовой части производится либо от внешнего клеммника (6) либо замыканием джампера (5) (питание от клеммника моторов +M соединяется с выводом Vin Arduino).
Для управления на прямую выводами L-ки (IN1, IN2, IN3, IN4),отвечающимими за выбор направления вращения, необходимо 4 вывода, а для двух микросхем целых 8. Для уменьшения количества управляющих выводов используется сдвиговый регистр74НС595 (3). Благодаря регистру управление сводится с 8-ми пинов к 4-ем. Также, на плату выведены 2 разъема для подключения сервоприводов (4). Управление сервоприводами стандартное с помощью библиотеки Servo.h Питание силовой части производится либо от внешнего клеммника (6) либо замыканием джампера (5) (питание от клеммника моторов +M соединяется с выводом Vin Arduino).
При замкнутом джампере напряжение для объединенного питания должно лежать в пределах от 6 до 12Вольт
К минусам данного шилда можно отнести то, что он задействует практически все цифровые пины:
Выводы, отвечающие за скорость вращения двигателей:
- Цифровой вывод 11- DC Мотор №1 / Шаговый №1.

- Цифровой вывод 3- DC Мотор №2 / Шаговый №1.
- Цифровой вывод 5- DC Мотор №3 / Шаговый №2.
- Цифровой вывод 6- DC Мотор №4 / Шаговый №2.
Выводы, отвечающие за выбор направления вращения двигателей:
- Цифровые выводы 4, 7, 8 и 12.
Выводы для управления сервоприводами (выведены на штырьки на краю платы):
- Цифровой вывод 9- Сервопривод №1
- Цифровой вывод 10- Сервопривод №2
В итоге незадействованными цифровыми выводами остаются только пины 2, 13 и пины интерфейса UART- 0, 1. Однако есть выход из данной ситуации. У нас остались незадействованные аналоговые входы A0-A6, их можно использовать как цифровые. В коде они будут записываться как цифровые с 14 по 19.
Комплект поставки и внешний вид данного товара могут отличаться от указанных на фотографиях в каталоге интернет-магазина.
Электронный модуль «Драйвер двигателей L293D»
1. Назначение устройства
Назначение устройства
Электронный модуль «Драйвер двигателей L293D» артикул ПЭМ10.493 (Рис. 1.1) является элементом системы управляющей электроники «Эвольвектор ВЕРТОР» (далее ВЕРТОР). Он выполняет функцию исполнения команд подключенного к нему контроллера по управлению нагрузкой, которую не способен принять на себя контроллер. В частности драйвер позволяет управлять моторами с суммарным током потребления 1.2 А (два мотора по 0.6 А). Это позволяет использоватьего для создания робототехнических устройств на основе классических плат Ардуино, в которых требуется управлять подходящими по характеристикам двигателями постоянного тока.
Модуль рассчитан на применение совместно с программируемыми контроллерами и шилдами, входящими в систему ВЕРТОР (подробная информация о системе представлена на сайте https://academy.evolvector.ru).
Рис. 1.1
2. Конструкция модуля и назначение выводов (контактов)
Модуль «Драйвер двигателей L293D» выполнен в форме печатной платы, на которой смонтированы группа штыревых контактов, с помощью которых осуществляется управление подключенной нагрузкой; клеммники для подключения нагрузки; индикатор питания драйвера двигателей; индикаторы подачи сигналов на подключенную нагрузку; микросхема драйвера двигателей, являющаяся основным управляющим элементом модуля (Рис. 2.1)
2.1)
Рис. 2.1
Плата имеет четыре крепежных отверстия под винт М3. Диаметры крепежных отверстий и физические размеры модуля представлены на рисунке 2.2.
Рис 2.2
По расстоянию между крепежными отверстиями (кратно 8 мм) модуль совместим с конструкторами Эвольвектор, LEGO, MakeBlock и может крепиться к их деталям с помощью стоек.
Модуль не является независимым устройством и может работать совместно с контроллерами системы ВЕРТОР или иными контроллерами.
Подключение модуля осуществляется с помощью разъема XH-2.54-4P, выводы которого имеют следующее назначение:
VCC — к “+” источника питания контроллера;
MOTOR 4,5-36V — к “+” источника питания батареи;
IN1 — подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления первым контактом (М11 на схеме рис. 3.1а) мотора №1;
3.1а) мотора №1;
IN2 — подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления вторым контактом (М12 на схеме рис. 3.1а) мотора №1;
IN3 — подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления первым контактом (М21 на схеме рис. 3.1а) мотора №2;
IN4 — подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления вторым контактом (М22 на схеме рис. 3.1а) мотора №2;
GND — «земля» (общий провод).
Для указанных контактов на печатной плате модуля нанесена соответствующая маркировка белого цвета.
Подробно о устройстве модуля, его функциях и возможностях рассказано на
Академии Эвольвектор — https://academy.evolvector.ru/pem10-493
L298N подключение к Ардуино — RadioRadar
Нет так давно мы рассматривали алгоритм сборки ЧПУ своими руками, где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке.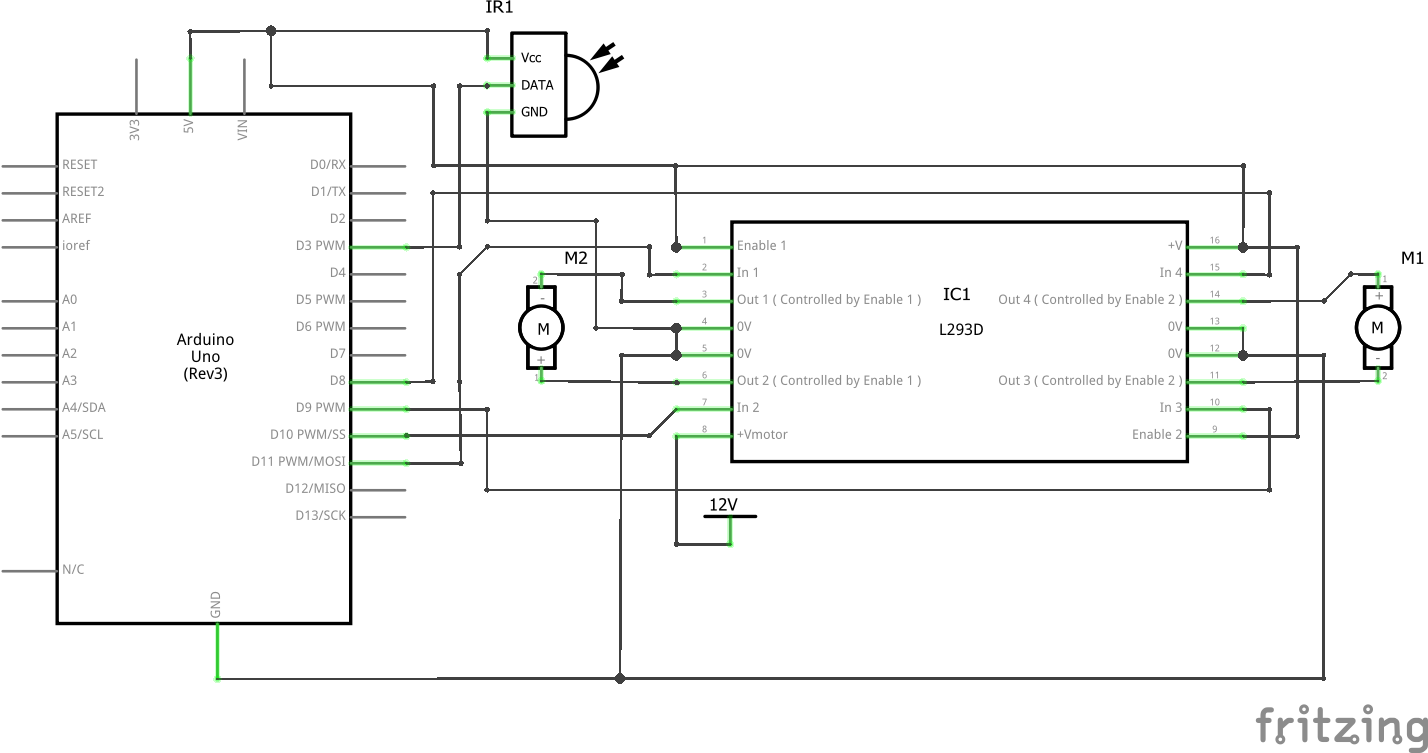
Конечно, шаговые двигатели (ШД) используются не только в ЧПУ и 3D-принтерах, им есть масса и других применений. Например, вкупе с популярным «конструктором для взрослых», Arduino, на базе которого можно создать всё что угодно. Однако, связка «Ардуино – шаговый двигатель» требует дополнительный элемент – драйвер.
Из-за того, что двигатель требует повышенного напряжения и силы тока, непосредственное подключение его к микроконтроллеру невозможно, напряжения логического нуля в +5В и силы тока в 40 мА не хватит для работы любого шагового двигателя. Функцию усилителя/переключателя берет на себя драйвер.
О нём мы и поговорим подробнее ниже.
L298N описание
Модуль L298N выполняет роль Н-моста (напряжение, прикладываемое к двигателю постоянного тока, может менять полярность для того, чтобы изменить направление вращения в противоположную сторону) и универсального драйвера для независимого управления сразу двумя двигателями постоянного тока или для одного шагового двигателя.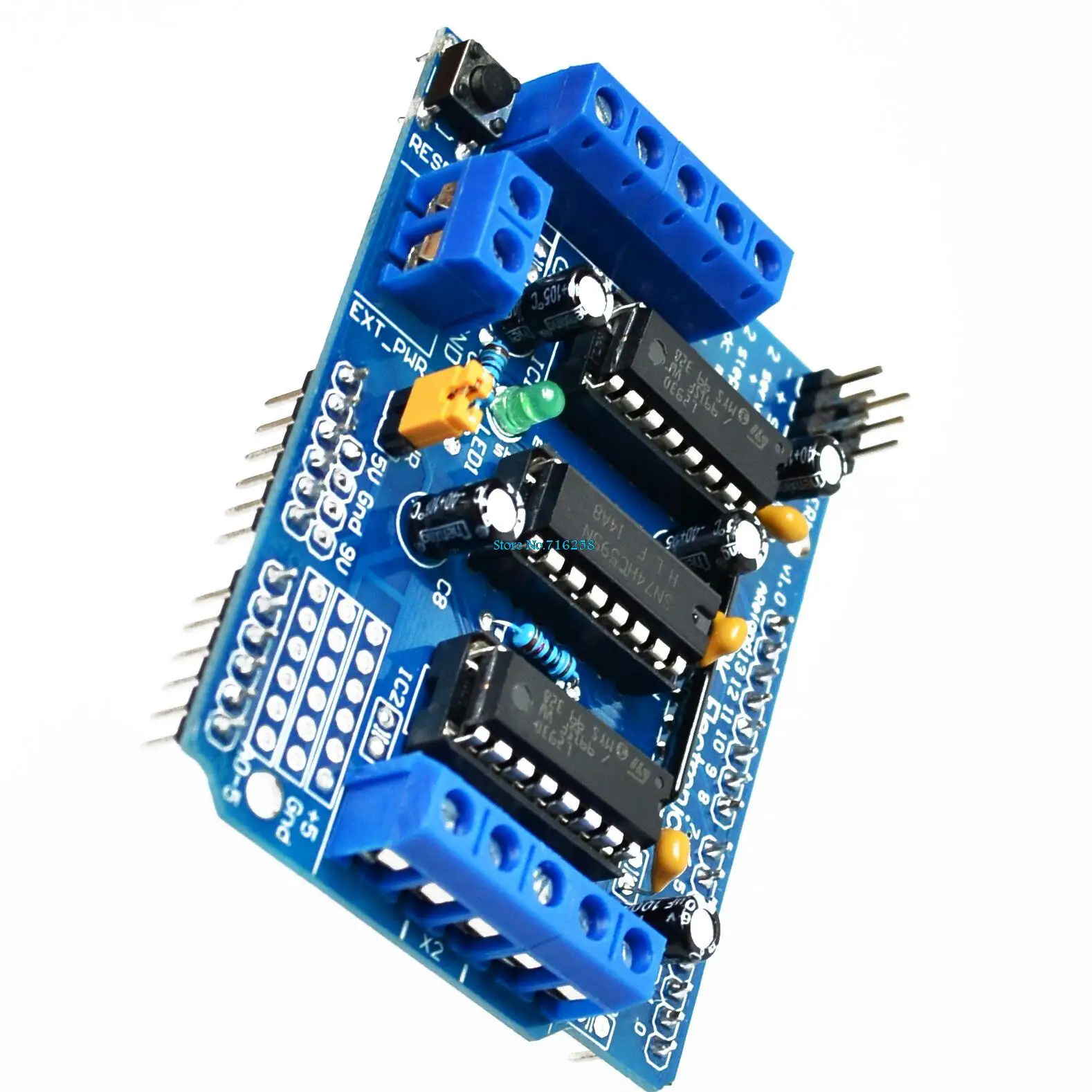
Модуль собирается на основе одноименной микросхемы (L298N).
К L298N можно подключить двигатели, питающиеся напряжением от 5 до 35 вольт. Управление может быть реализовано в активном или пассивном режимах.
1.Активный – доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
2.Пассивный – контроллер будет понимать только логику «включить/выключить двигатель». Управление уровнем выходного напряжения будет недоступно.
L298N – это облегчённая версия платы L293D. По сравнению с последней на L298N отсутствуют защитные диоды (их можно установить самостоятельно при необходимости защиты от скачков тока в процессе пуска двигателей).
Подключение
Чтобы логика управления была понятнее, сначала разберёмся с джамперами и клеммами на плате.
Рис. 1. Джамперы и клеммы на плате
К клеммникам 1 и 2 подключаются двигатели, логика подключения зависит от моделей двигателей и логики их работы.
Блок клемм 3 отвечает за подключение питания двигателей.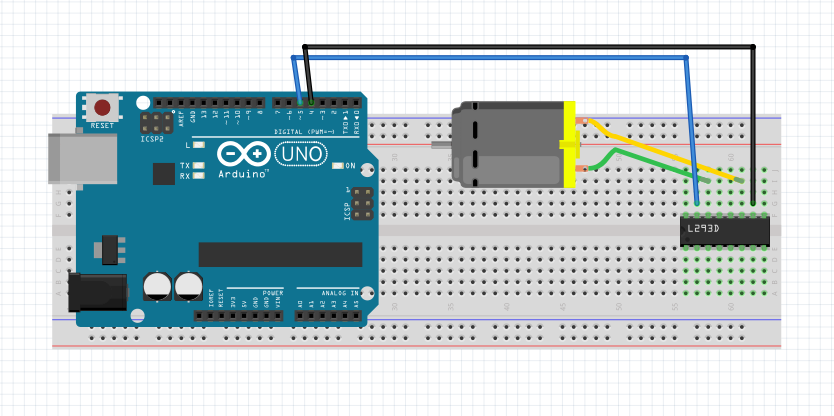 Первый контакт — +12. На него подаётся питание от 5 до 12 вольт, если джампер 3 одет, и от 12 до 35 воль, если джампер 3 снят.
Первый контакт — +12. На него подаётся питание от 5 до 12 вольт, если джампер 3 одет, и от 12 до 35 воль, если джампер 3 снят.
При питании до +12В встроенный стабилизатор сам генерирует питание для логической части схемы, поэтому контакт +5В можно не использовать.
Если джампер 3 снят, то контакт +5В требуется запитать отдельно.
Управляющие сигналы от Ардуино или с другого микроконтроллера должны подаваться на контакты IN1-IN4, ENA, ENB. В зависимости от логических уровней и конфигурации джамперов 1,2 будет подаваться питание на двигатели/двигатель.
Джамперы 1 и 2 отвечают за переключение между активным и пассивным режимами работы драйвера. Если джампер одет, то реализуется логика «пассивного» управления.
Теперь для наглядности рассмотрим пару реальных схем подключения.
Управление двумя двигателями постоянного тока
Схема соединения будет выглядеть следующим образом.
Рис. 2. Схема соединения
Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.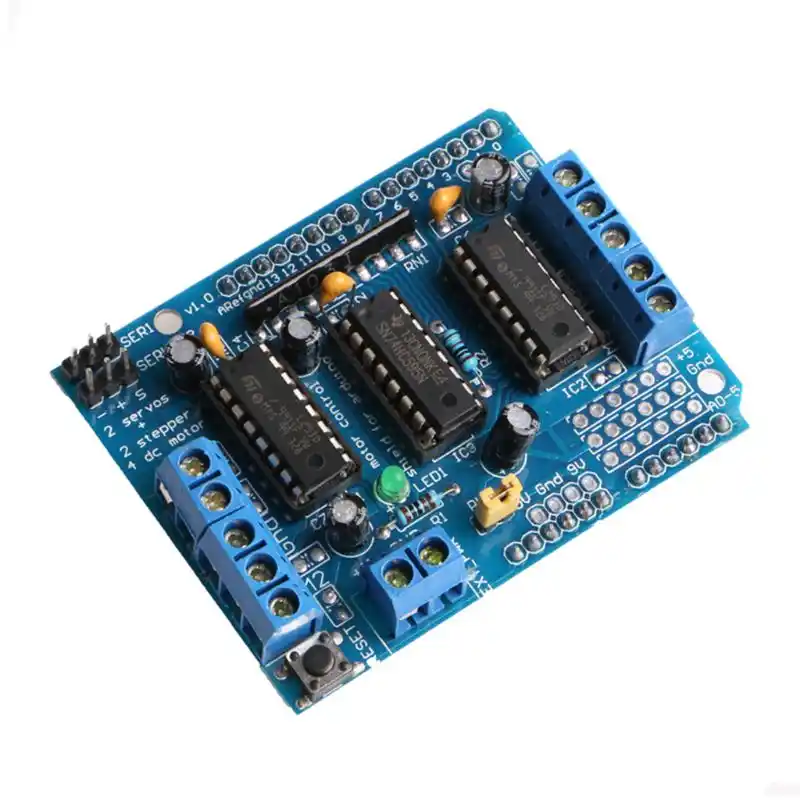
Стоит особое внимание уделить пинам на Ардуино с ШИМ-модуляцией (рядом с цифровым значением есть специальный символ «~»). Они необходимы для управления скоростью вращения вала (чем выше уровень напряжения, тем выше скорость).
Теперь о логике, на примере левого двигателя (см. изображение выше).
Таблица
Логический уровень на контакте ENA | Логический уровень на контакте IN1 | Логический уровень на контакте IN2 | Результат работы двигателя |
1 | 1 | 0 | Вращается по часовой стрелке |
1 | 0 | 1 | Вращается против часовой |
0 | 1 | 0 | Не вращается |
0 | 0 | 1 | Не вращается |
Логический уровень на контакте ENAЛогический уровень на контакте IN1Логический уровень на контакте IN2Результат работы двигателя
Получается, что контакт ENA отвечает за разрешение работы двигателя. А от комбинации на входах IN1, IN2 зависит направление вращения.
А от комбинации на входах IN1, IN2 зависит направление вращения.
Если на контакт ENA подать не логическую единицу, а заданный уровень напряжения из доступного диапазона (0-255), то изменится скорость вращения.
Управление шаговым двигателем
Соединение схемы управления, включающей в себя драйвер, двигатель Nema17 и Arduino Nano, выглядит следующим образом.
Рис. 3. Соединение схемы управления,
Назначение контактов A+, A-, B+ и B- может отличаться на вашей модели привода, поэтому необходимо изучить документацию для определения правильного назначения.
Ввиду того, что логика работы данной схемы предполагает наличие на выходах только логических нулей и единиц, то джамперами 1 и 2 модуль L298N переключается в пассивный режим.
Скетч для работы с шаговым двигателем есть во встроенной библиотеке IDE для Ардуино (называется Stepper Library, найти её можно так — File -> Examples -> Stepper).
Константа stepsPerRevolution отвечает за количество шагов в одном обороте, по умолчанию установлено значение 200. Его необходимо изменить, если модель вашего двигателя имеет другой показатель.
Его необходимо изменить, если модель вашего двигателя имеет другой показатель.
Метод myStepper.setSpeed() отвечает за настройку скорости вращения, по умолчанию в скетче указан показатель 60, его можно изменить под свои требования.
Вызов функции, инициализирующей вращение, осуществляется через метод step с параметром stepsPerRevolution, при отрицательном параметре вращение осуществляется в обратную сторону.
Пример с использованием этой библиотеки можно найти ниже во вложениях. Полную документацию по API можно найти на официальном сайте проекта.
Скетчи двигателей постоянного тока и шаговых двигателей можно найти здесь.
Автор: RadioRadar
L298N datasheet на русском – Драйвер моторов двухканальный L298N. Dual DC Motor Driver RKP-MDL298-01A-V2 – Драйверы двигателей – Delvik.ru – Доска объявлений Перми
Драйвер моторов двухканальный L298N. Dual DC Motor Driver RKP-MDL298-01A-V2 — Драйверы двигателей
|
Есть в наличии Есть в наличии | ||
|
|
||
Модуль управления моторами RKP-01A на микросхеме L298N.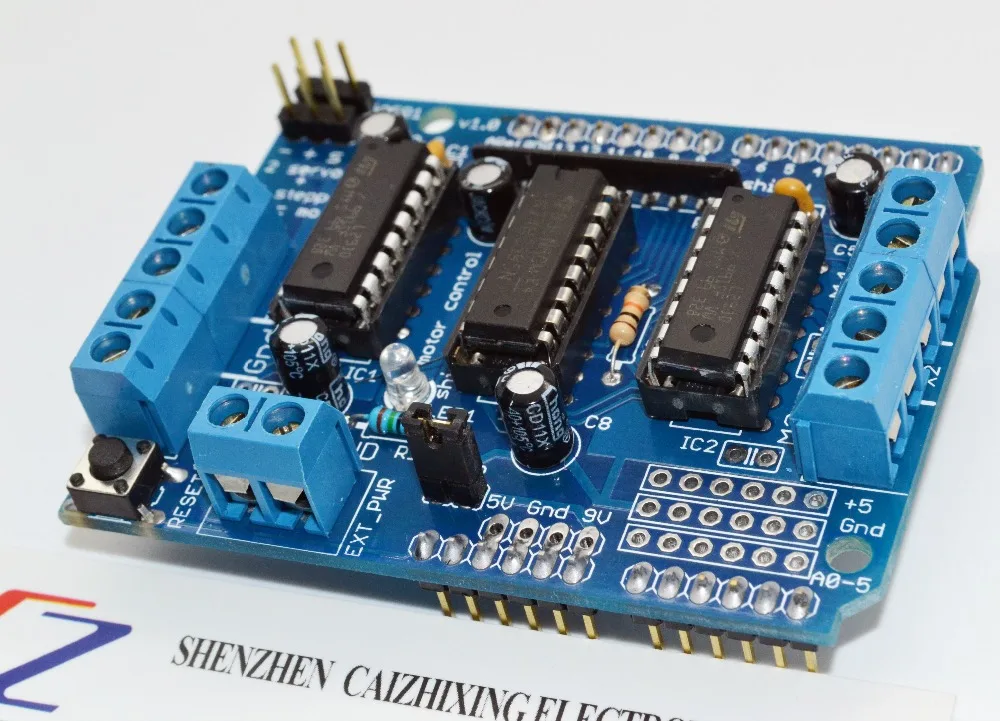 С его помощью можно контролировать вращение двух независимых коллекторных моторов постоянного тока (DC-моторов) или одного двухобмоточного четырехпроводного шагового двигателя.
С его помощью можно контролировать вращение двух независимых коллекторных моторов постоянного тока (DC-моторов) или одного двухобмоточного четырехпроводного шагового двигателя.
Здесь можно посмотреть подробную статью о подключении драйвера моторов на микросхеме L298N к Arduino =>>
Плата контроллера двигателей RKP-01A благодаря микросхеме драйвера моторов L298N позволяет легко управлять двумя электромоторами использующими питание от 5В до 35В. Установленный на основную микросхему L298N радиатор охлаждения позволяет выдерживать ток нагрузки до 2A на канал. Для защиты драйвера моторов от перегрузки используются специальные Диоды Shotki. Модуль контроллера двигателей позволяет использовать его в различных робототехнических проектах, размещая его по своему усмотрению.
Посмотреть DataSheet микросхемы драйвера моторов L298N (формат PDF размер 611 КБ)
Ключевыми особенностями драйвера моторов RKP-01A являются наличие радиатора охлаждения L298N, малые габариты и вес (35 грамм), а также светодиодная индикация наличия питания и указания направления вращения двигателей.
Характеристики драйвера моторов RKP-01A на микросхеме L298N:
— Микросхема драйвера: L298N (с радиатором охлаждения)
— Возможность питания внешней логики (Vss): +5V ~ +7V (внутренний стабилизатор +5В)
— Входное напряжение логической части (Vd): от 6V до 12V
— Входное напряжение управляемой части (Vs): от +5V до +35V
— Рабочий ток внешней логической части (Iss): 0 ~ 36mA
— Ток нагрузки каждой управляемой части (Io): 2A
— Пиковый ток нагрузки каждой управляемой части (Io): 3А
— Максимальная потребляемая мощность: 20Вт (при температуре = 75°C)
— Высокий уровень входного управляющего сигнала (High): 2.3В = Vin = Vss
— Низкий уровень входного управляющего сигнала (Low): -0.3В = Vin = 1.5В
— Рабочая температура окружающей среды: от -25 до +130°C
— Размеры модуля со стойками крепления и радиатором L298: 53 x 47 x 27 мм
— Вес драйвера моторов RKP-01A: 35 грамм
Плата контролера двигателей имеет четыре специальных отверстия и специальные стойки крепления, выполненные из латуни.
Плата расширения RKP-01A может используется вместе с Arduino и устанавливается отдельно от процессорного модуля Arduino. Применяется, например, для построения движущихся роботов на колесном или гусеничном приводе.
Для подключения моторов постоянного тока (DC-моторов) служат порты:
OUT1 и OUT2 — мотор A
OUT3 и OUT4 – мотор B
(управление электромоторами полностью независимо друг от друга)
Для работы подключите источник питания к контакту тройного клемника «VСС».
При подаче питания от +6V до +12V и одетом джампере JP1, питание подается и на стабилизатор, который выдает +5V для питания логики драйвера. Подавать отдельно питание +5V для логики не нужно.
При подаче питания выше +12V, джампер JP1 должен быть снят. Питание на логику подается отдельно через клемму «+5V».
Управление DC-моторами осуществляется через специальные входы:
ENA (ENB) – надетая перемычка активирует включение канала управления двигателем.
ENA (ENB) — соединить с ШИМ-выходом MCU, для контроля скорости вращения
I1 (I3) и I2 (I4) – логические входы (имеют отключаемые подтягивающие резисторы) задания направления вращения (см.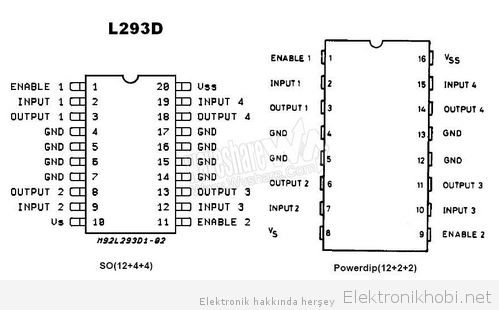 таблицу ниже)
таблицу ниже)
ENA I1 I2 Состояние мотора А
PWM>0 0 0 Стоп
PWM>0 0 1 Вращение по часовой
PWM>0 1 0 Вращение против часовой
PWM>0 1 1 Стоп
ENB I3 I4 Состояние мотора BЛогика управления шаговым двигателем выглядит следующим образом: A, B, C, D, это четыре обмотки шагового двигателя.
PWM>0 0 0 Стоп
PWM>0 0 1 Вращение по часовой
PWM>0 1 0 Вращение против часовой
PWM>0 1 1 Стоп
Диаграмма ниже (четыре фазы шагового двигателя).
Управление шаговым двигателем осуществляется аналогично управлению двумя DC-моторами.
Схема драйвера моторов L298N для робота с управлением от микроконтроллера.
Нажать и посмотреть схему =>>
Товар был добавлен в наш каталог Среда, 04 Октября 2017
robot-kit.ru
|
Корпус: Multiwatt15
|
L2938N — представляет собой двойной мостовой драйвер для управления двунаправленными нагрузками с токами до 2А и напряжением от 4. В L298 существует разделение электропитания для логической схемы и для нагрузки, что позволяет подключить нагрузку с меньшим или большим напряжением питания, чем у микросхемы, а также уменьшает помехи. Микросхемы L298N имеют встроенную защиту от перегрева. Выходы микросхемы отключаются при нагреве до температуры около +70°С. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Расположение выводов L298N: |
Назначение выводов L298N:
Логическая таблица работы L298N
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Структурная схема L298N
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Предельно допустимые режимы L298
|
Основные параметры L298:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Типовые схемы использования драйвера L298N Использование внешних диодов для индуктивных нагрузок (моторов, реле, электромагнитов) обязательно! |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Управление однонаправленными двигателями
H — высокий уровень, L — низкий уровень, X — произвольно.
|
Управление двунаправленным двигателем
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Типовая схема управления шаговым двигателем с помощью комплекта микросхем L297 и L298N: (Рекомендуется использовать быстрые диоды с Tвосст.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Более подробное описание микросхемы L298N с электрическими характеристиками и диаграммами работы и схемами включения Вы можете получить скачав файл документации ниже (Datasheet на английском языке). |
Ссылки: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 5 V до 46 V. Микросхема разработана для управления реле, соленоидами, двигателями постоянного тока и шаговыми двигателями. L298N имеет TTL совместимые входы.
5 V до 46 V. Микросхема разработана для управления реле, соленоидами, двигателями постоянного тока и шаговыми двигателями. L298N имеет TTL совместимые входы.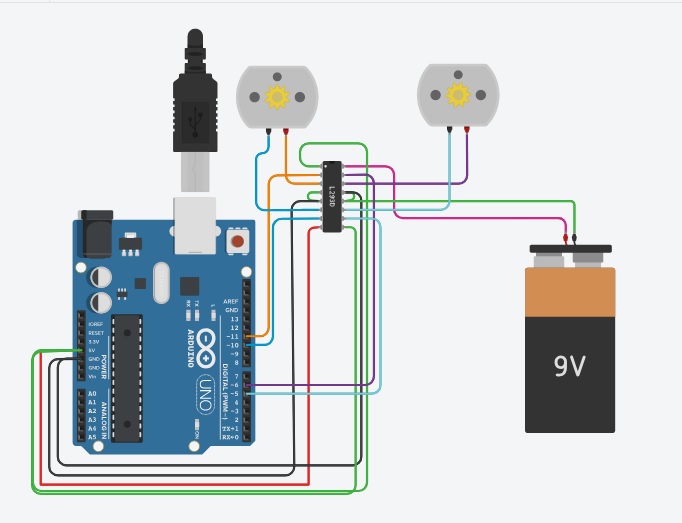 .7V
.7V .3µA
.3µAtec.org.ru
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода — и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения — Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным — не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:
Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).
При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V — 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc — напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB — вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
arduinomaster.ru
L298N подключение к Ардуино — RadioRadar
Справочник
Главная Справочник Энциклопедия радиоинженера
«Справочник» — информация по различным электронным компонентам: транзисторам, микросхемам, трансформаторам, конденсаторам, светодиодам и т.д. Информация содержит все, необходимые для подбора компонентов и проведения инженерных расчетов, параметры, а также цоколевку корпусов, типовые схемы включения и рекомендации по использованию радиоэлементов.
Нет так давно мы рассматривали алгоритм сборки ЧПУ своими руками, где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке.
Конечно, шаговые двигатели (ШД) используются не только в ЧПУ и 3D-принтерах, им есть масса и других применений. Например, вкупе с популярным «конструктором для взрослых», Arduino, на базе которого можно создать всё что угодно. Однако, связка «Ардуино – шаговый двигатель» требует дополнительный элемент – драйвер.
Из-за того, что двигатель требует повышенного напряжения и силы тока, непосредственное подключение его к микроконтроллеру невозможно, напряжения логического нуля в +5В и силы тока в 40 мА не хватит для работы любого шагового двигателя. Функцию усилителя/переключателя берет на себя драйвер.
О нём мы и поговорим подробнее ниже.
L298N описание
Модуль L298N выполняет роль Н-моста (напряжение, прикладываемое к двигателю постоянного тока, может менять полярность для того, чтобы изменить направление вращения в противоположную сторону) и универсального драйвера для независимого управления сразу двумя двигателями постоянного тока или для одного шагового двигателя.
Модуль собирается на основе одноименной микросхемы (L298N).
К L298N можно подключить двигатели, питающиеся напряжением от 5 до 35 вольт. Управление может быть реализовано в активном или пассивном режимах.
1. Активный – доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
2. Пассивный – контроллер будет понимать только логику «включить/выключить двигатель». Управление уровнем выходного напряжения будет недоступно.
L298N – это облегчённая версия платы L293D. По сравнению с последней на L298N отсутствуют защитные диоды (их можно установить самостоятельно при необходимости защиты от скачков тока в процессе пуска двигателей).
Подключение
Чтобы логика управления была понятнее, сначала разберёмся с джамперами и клеммами на плате.
Рис. 1. Джамперы и клеммы на плате
К клеммникам 1 и 2 подключаются двигатели, логика подключения зависит от моделей двигателей и логики их работы.
Блок клемм 3 отвечает за подключение питания двигателей. Первый контакт — +12. На него подаётся питание от 5 до 12 вольт, если джампер 3 одет, и от 12 до 35 воль, если джампер 3 снят.
При питании до +12В встроенный стабилизатор сам генерирует питание для логической части схемы, поэтому контакт +5В можно не использовать.
Если джампер 3 снят, то контакт +5В требуется запитать отдельно.
Управляющие сигналы от Ардуино или с другого микроконтроллера должны подаваться на контакты IN1-IN4, ENA, ENB. В зависимости от логических уровней и конфигурации джамперов 1,2 будет подаваться питание на двигатели/двигатель.
Джамперы 1 и 2 отвечают за переключение между активным и пассивным режимами работы драйвера. Если джампер одет, то реализуется логика «пассивного» управления.
Теперь для наглядности рассмотрим пару реальных схем подключения.
Управление двумя двигателями постоянного тока
Схема соединения будет выглядеть следующим образом.
Рис. 2. Схема соединения
Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
Стоит особое внимание уделить пинам на Ардуино с ШИМ-модуляцией (рядом с цифровым значением есть специальный символ «~»). Они необходимы для управления скоростью вращения вала (чем выше уровень напряжения, тем выше скорость).
Теперь о логике, на примере левого двигателя (см. изображение выше).
Таблица
| Логический уровень на контакте ENA | Логический уровень на контакте IN1 | Логический уровень на контакте IN2 | Результат работы двигателя |
| 1 | 1 | 0 | Вращается по часовой стрелке |
| 1 | 0 | 1 | Вращается против часовой |
| 0 | 1 | 0 | Не вращается |
| 0 | 0 | 1 | Не вращается |
Логический уровень на контакте ENA Логический уровень на контакте IN1 Логический уровень на контакте IN2 Результат работы двигателя
Получается, что контакт ENA отвечает за разрешение работы двигателя. А от комбинации на входах IN1, IN2 зависит направление вращения.
Если на контакт ENA подать не логическую единицу, а заданный уровень напряжения из доступного диапазона (0-255), то изменится скорость вращения.
Управление шаговым двигателем
Соединение схемы управления, включающей в себя драйвер, двигатель Nema17 и Arduino Nano, выглядит следующим образом.
Рис. 3. Соединение схемы управления,
Назначение контактов A+, A-, B+ и B- может отличаться на вашей модели привода, поэтому необходимо изучить документацию для определения правильного назначения.
Ввиду того, что логика работы данной схемы предполагает наличие на выходах только логических нулей и единиц, то джамперами 1 и 2 модуль L298N переключается в пассивный режим.
Скетч для работы с шаговым двигателем есть во встроенной библиотеке IDE для Ардуино (называется Stepper Library, найти её можно так — File -> Examples -> Stepper).
Константа stepsPerRevolution отвечает за количество шагов в одном обороте, по умолчанию установлено значение 200. Его необходимо изменить, если модель вашего двигателя имеет другой показатель.
Метод myStepper.setSpeed() отвечает за настройку скорости вращения, по умолчанию в скетче указан показатель 60, его можно изменить под свои требования.
Вызов функции, инициализирующей вращение, осуществляется через метод step с параметром stepsPerRevolution, при отрицательном параметре вращение осуществляется в обратную сторону.
Пример с использованием этой библиотеки можно найти ниже во вложениях. Полную документацию по API можно найти на официальном сайте проекта.
Скетчи двигателей постоянного тока и шаговых двигателей можно найти здесь.
Автор: RadioRadar
Дата публикации: 30.05.2018
Мнения читателей
Нет комментариев. Ваш комментарий будет первый.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу:
www.radioradar.net
Ардуино L298N драйвер шаговых двигателей
Существует множество ситуаций, где применение драйвера шаговых двигателей Ардуино L298N обеспечит идеальное решение. Например, этот «шилд» может равномерно вращать видеокамеру для съёмки, либо открывать или закрывать двери гаража в Вашем особняке.
Ардуино L298N драйвер шаговых двигателей
Используется для:
1. Управление двумя двигателями постоянного тока;
2. Управление шаговым двух фазным двигателем;
3. Используется как платформа драйвера постоянного тока.
Широко применяется в роботостроительстве на Ардуино.
Позволяет с помощью любого микроконтроллера управлять как униполярными так и биполярными шаговыми двигателями.
(биполярная схема является более эффективной, поэтому, если позволяет напряжение питания и разводка обмоток двигателя, желательно использовать биполярную схему включения)
Микросхема L298N представляет из себя двойной Н мост, общий ток через 2 моста — 4 А.
Содержит встроенный стабилизатор на 5 В, защитные диоды, конденсаторы, разъемы и индикатор.
Оригинальный DataSheet
Характеристики:
- Напряжение питания двигателя: +3…+35 В.
- Питание логики: 5 В.
- Входные логические уровни управления:
- лог.0: -0.3…1.5В;
- лог.1: 2.3…5В;
- Ток управления: 36 мА.
- Максимальный постоянный ток через один мост: 2 А.
- Максимальная рассеиваемая мощность: 20 Вт.
- Размер: 43×43×27мм.
Распиновка Ардуино L298N драйвера шаговых двигателей
Плата имеет следующие пины подключения:
Vcc — подключение внешнего питания двигателей.
+5 — питание логики.
GND — общий.
IN1, IN2, IN3, IN4 (разъем P4 на схеме) — входы управления двигателями.
OUT1, OUT2 (разъем P2 на схеме) — выход первого двигателя.
OUT3, OUT4 (разъем P3 на схеме) — выход второго двигателя.
Перемычки ENA и ENB используются для разрешения включения двигателей.
Выключатель S1 служит для переключения питания логической части микросхемы.
Схема модуля L298N Arduino имеет следующий вид:
Подключение к Ардуино L298N драйвера шаговых двигателей
Подключение двух двигателей постоянного тока к Ардуино L298N
Пример программной реализации управления модулем L298N
Данная программа управляет двумя двигателями постоянного тока. Для прошивки Arduino uno r3 необходимо всего лишь выбрать в выпадающем списке ниже, Вашу плату, указать порт и нажать Run on Arduino.
Данная программа управляет одним шаговым двигателем в режимах «шаг» или «полушаг».
Для прошивки Arduino uno r3 необходимо всего лишь выбрать в выпадающем списке ниже, Вашу плату, указать порт и нажать Run on Arduino.
Что бы прочитать данные из порта, выберите используемый COM порт, скорость и нажмите Connect.
Купить Arduino в Украине — arduinomania.in.ua
arduinolife.in.ua
Драйвер двигателяL293D — Arduino — Робо Индия || Учебники || Изучите Arduino |
В этом руководстве Robo India объясняется, как управлять двигателем постоянного тока с помощью драйвера двигателя L293D IC с Arduino. (Робо Индия)
1. Введение
Драйвер двигателя — это модуль для двигателей, который позволяет вам управлять рабочей скоростью и направлением двух двигателей одновременно. Этот драйвер двигателя разработан и разработан на основе L293D IC.
L293D — это 16-контактная микросхема драйвера двигателя.Он предназначен для обеспечения двунаправленных управляющих токов при напряжении от 5 В до 36 В.
1.2 Требуемое оборудование
1,3 L293D Вывод IC
L293D — это 16-контактная ИС с восемью контактами на каждой стороне для одновременного управления двумя двигателями постоянного тока. Для каждого двигателя имеется 4 контакта INPUT, 4 контакта OUTPUT и 2 контакта ENABLE.
Контакт 1: когда Enable1 / 2 находится в HIGH, левая часть IC будет работать, то есть двигатель, подключенный к контактам 3 и 6, будет вращаться.
Контакт 2: Вход 1, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 1.
Контакт 3: Выход 1, этот контакт подключен к одной клемме двигателя.
Контакт 4/5: Контакты GND
Контакт 6: Выход 2, этот контакт подключен к одной клемме двигателя.
Контакт 7: Вход 2, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 2.
Контакт 8: VSS, этот контакт используется для подачи питания на подключенные двигатели с максимальным напряжением от 5 В до 36 В в зависимости от подключенного двигателя.
Pin 9: когда Enable 3/4 находится в HIGH, правая часть IC будет работать, то есть двигатель, подключенный к контакту 11 и контакту 14, будет вращаться.
Контакт 10: вход 4, когда этот контакт ВЫСОКИЙ, ток будет течь через выход 4.
Контакт 11: Выход 4, этот контакт подключен к одной клемме двигателя.
Контакт 12/13: Контакты GND
Контакт 14: Выход 3, этот контакт подключен к одной клемме двигателя.
Контакт 15: Вход 3, когда этот контакт ВЫСОКИЙ, ток будет проходить через выход 3.
Контакт 16: VCC, для питания IC, например, 5 В.
2. Соединения с Arduino
1. Модуль 5V (VCC) — Arduino 5V.
2. Модуль GND — Arduino GND.
3. Модуль 1 — Arduino D8.
4. Модуль 2 — Arduino D9.
5. Модуль 3 — Arduino D10.
6. Модуль 4 — Arduino D11.
7. Модуль «Клеммы двигателя» — двигатели постоянного тока.
8. Модуль VSS power terminal — Внешний источник питания 9В.
Выполните подключение, как показано выше.
Убедитесь, что на контактах Enable 1-2 и Enable 3-4 модуля предварительно установлены перемычки, чтобы двигатель был включен и работал на максимальной скорости.
2.1. Рабочий механизм
Вращение двигателя зависит от контактов включения. Когда Enable 1/2 имеет значение HIGH, двигатель, подключенный к левой части IC, будет вращаться следующим образом:
| Вход 1 | Вход 2 | Результат |
| 0 | 0 | Стоп |
| 0 | 1 | Против часовой стрелки |
| 1 | 0 | По часовой стрелке |
| 1 | 1 | Стоп |
3.Программирование:
Вот код для запуска этой схемы.
Вы можете скачать этот код (Arduino Sketch) отсюда.
// Учебное пособие по управлению двигателем от RoboIndia
// Требования к оборудованию: драйвер двигателя (от RoboIndia) и Arduino
// Мотор A
const int inputPin1 = 10; // Вывод 15 микросхемы L293D
const int inputPin2 = 11; // Вывод 10 микросхемы L293D
// Мотор B
const int inputPin3 = 9; // Вывод 7 микросхемы L293D
const int inputPin4 = 8; // Вывод 2 микросхемы L293D
установка void ()
{
pinMode (inputPin1, ВЫХОД);
pinMode (inputPin2, ВЫХОД);
pinMode (inputPin3, ВЫХОД);
pinMode (inputPin4, ВЫХОД);
}
пустой цикл ()
{
digitalWrite (inputPin1, HIGH);
digitalWrite (inputPin2, LOW);
digitalWrite (inputPin3, HIGH);
digitalWrite (inputPin4, LOW);
}
4.Выход
После подключения вы скопируете и вставите этот код в Arduino IDE, чем загрузите код. Оба мотора начнут вращаться.
Если у вас есть какие-либо вопросы, напишите нам по адресу [email protected]
С уважением и уважением
Команда разработки контента
Robo India
https://roboindia.com
Arduino с использованием драйвера мотора IC L293D
Интерфейс мотор-редуктора Arduino с использованием IC L293D
В этой статье мы публикуем проект, который объясняет различные аспекты интерфейса двигателя Arduino-Gear.Редукторный двигатель — это специально разработанный двигатель постоянного тока, редукторный узел которого помогает увеличить крутящий момент и снизить скорость. По сравнению с обычным двигателем постоянного тока максимальная скорость вращения редукторного двигателя меньше. Но у них есть то преимущество, что, используя правильную комбинацию передач, его частота вращения может быть уменьшена до любого желаемого значения. В отличие от серводвигателя, мотор-редуктор также может вращаться непрерывно. Направление мотор-редуктора можно изменить, просто поменяв полярность подключения аккумулятора. А скорость двигателя можно контролировать, изменяя уровень напряжения на нем.Микросхема драйвера двигателя с именем L293D используется здесь для взаимодействия редукторного двигателя с Arduino. L293D состоит из двух H-мостов, созданных с использованием 4-транзисторной схемы, которая помогает нам изменять направление вращения и контролировать скорость двигателя постоянного тока.
Давайте начнем наше руководство и узнаем, как делается интерфейс двигателя IC L293D-Arduino-Gear.
Цели проекта
- Взаимодействие мотор-редуктора с Arduino.
- Генерирующий код для поворота двигателя в желаемом направлении.
- Контроль скорости двигателя с помощью потенциометра.
Необходимые компоненты
| Компонент | Спецификация | Количество |
|---|---|---|
| Arduino | Uno | 1 |
| Потенциометр | 10K | 1 |
| Драйвер двигателя | L293D | 1 |
| Адаптер | 9 В, 1 А | 1 |
| Мотор-редуктор постоянного тока | (6-12) В | 1 |
Принципиальная схема
Соберите схему, как показано на схеме.Компоненты и соединения описаны ниже.
Схема интерфейса мотор-редуктора ArduinoОписание цепей
В схеме используется Arduino UNO в качестве платформы. Мотор-редуктор подключен к Arduino UNO через микросхему драйвера мотора L293D. Как упоминалось ранее, ИС драйвера двигателя состоит из двух Н-мостовых схем, которые могут использоваться для управления двумя двигателями одновременно. L293D имеет 4 входных контакта, 4 выходных контакта, 2 контакта включения, Vss, Vcc и GND.Vcc — это напряжение, необходимое для его внутренней работы. L293D не будет использовать это напряжение для привода двигателя. Для привода двигателей предусмотрено отдельное положение, обеспечивающее питание двигателя Vss.
Здесь мы используем только один двигатель постоянного тока, поэтому используются только первые два входных контакта IC. Они подключены к любым двум цифровым выводам Arduino (вот они, 10 и 11). А два выходных контакта L293D подключены к мотор-редуктору. Вывод E1 (вывод включения) L293D затем подключается к любому выводу PWM Arduino (здесь это 9 -й вывод ).Мы можем просто запустить двигатель, подав высокий сигнал на 10 -м выводе , низкий на 11 -й вывод и высокий сигнал на разрешающий вывод. 10 -й штырь и 11 -й штырь Arduino используются для управления направлением вращения, а 9-й -й штырь предназначен для регулирования скорости двигателя. Регулировка скорости достигается за счет генерации сигнала ШИМ на разрешающем выводе микросхемы L293D.
В этом проекте используется потенциометр для определения силы сигнала ШИМ, подаваемого на разрешающий вывод.Выходной вывод потенциометра подключен к A0 (аналоговый вывод) Arduino. Изменяя потенциометр, напряжение на выводе A0 будет изменяться от 0 до 5 В. Этот изменяющийся аналоговый сигнал привязывается к желаемому значению и используется для генерации сигнала ШИМ.
L293D Motor Driver-Arduino-Gear Motor Interface Video
Программа / Код
Скачать программу
Важные аспекты и подпрограммы программы объясняются ниже.
В начале программы определены четыре препроцессора, которые упоминают контакты Arduino, которые используются для сопряжения. В функции «setup ()» контакты Arduino, которые используются для управления двигателем, настроены как выходные контакты. И вывод, который используется для снятия аналоговых показаний с потенциометра, настроен как входной вывод.
В функции «loop ()» в начале объявляются две переменные. «AnalogRead ()» — это функция, используемая для присвоения значений переменной с именем «potValue».Функция analogRead () считывает значение с указанного аналогового вывода. Плата Arduino содержит 10-битный аналого-цифровой преобразователь. Это означает, что он преобразует входные напряжения от 0 до 5 вольт в целочисленные значения от 0 до 1023.
«analogWrite ()» используется для генерации желаемого сигнала ШИМ на выводе. Входными параметрами для этой функции являются номер контакта и значение ШИМ (от 0 до 254). Поскольку предел значения ШИМ заканчивается на 254, нам нужно сопоставить переменную potValue с соответствующим диапазоном.«Map ()» — это функция, которая повторно отображает число из одного диапазона в другой. Полученное таким образом значение затем присваивается переменной с именем «pwmValue». Затем он используется в качестве параметра для функции «analogWrite ()» и генерирует требуемый сигнал ШИМ.
Arduino Управление скоростью и направлением двигателя постоянного тока с помощью L293D
В этом примере показано, как управлять скоростью и направлением вращения двигателя постоянного тока с помощью микросхемы драйвера двигателя Arduino UNO и L293D.
Чип L293D с четырьмя половинными H-драйверами позволяет нам управлять двумя двигателями в обоих направлениях, с двумя выходами PWM от Arduino, мы можем легко контролировать скорость, а также направление вращения одного двигателя постоянного тока.(ШИМ: широтно-импульсная модуляция).
Необходимые компоненты:
- Плата Arduino UNO
- Драйвер L293D
- Двигатель постоянного тока 12 В
- Потенциометр 10 кОм
- Кнопка
- Источник 12 В
- Макет
- Перемычки
Схема управления двигателем постоянного тока Arduino:
Принципиальная электрическая схема проекта приведена ниже.
Скорость двигателя постоянного тока (в обоих направлениях) контролируется потенциометром 10k, который подключен к аналоговому каналу 0 (A0), а направление вращения контролируется кнопкой, которая подключена к контакту 8 платы Arduino UNO.Если кнопка нажата, двигатель сразу изменит свое направление.
Драйвер L293D имеет 2 VCC: VCC1 — +5 В, а VCC2 — +12 В (то же, что и номинальное напряжение двигателя). Контакты IN1 и IN2 — это контакты управления, где:
| IN1 | IN2 | Функция |
| л | H | Направление 1 |
| H | л | Направление 2 |
| л | л | Быстрая остановка двигателя |
| H | H | Быстрая остановка двигателя |
Как показано на принципиальной схеме, нам нужны только 3 контакта терминала Arduino, контакт 8 предназначен для кнопки, которая переключает направление вращения двигателя.Контакты 9 и 10 являются выходами сигнала ШИМ, в любой момент времени имеется только 1 активный ШИМ, это позволяет нам управлять направлением, а также скоростью, изменяя рабочий цикл сигнала ШИМ. Активный вывод PWM определяет направление вращения двигателя (поочередно, на другом выходе — логический 0).
Код Arduino: Код
Arduino ниже.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
// Управление скоростью и направлением двигателя постоянного тока Arduino
#define button 8 #define pot 0 #define pwm1 9 #define pwm2 10
boolean motor_dir = 0; int motor_speed;
void setup () { pinMode (кнопка, INPUT_PULLUP); pinMode (pwm1, ВЫХОД); pinMode (pwm2, ВЫХОД); }
пустая петля () { motor_speed = analogRead (pot) / 4; if (motor_dir) analogWrite (pwm1, motor_speed); еще аналогWrite (pwm2, motor_speed); if (! DigitalRead (button)) {// Если кнопка направления нажата while (! DigitalRead (button)); // Ждем, пока кнопка направления не будет отпущена motor_dir =! Motor_dir; // Переключение переменной направления if (motor_dir) digitalWrite (pwm2, 0); иначе digitalWrite (pwm1, 0); } } |
На видео ниже показана простая аппаратная схема примера:
А ниже показан пример моделирования с использованием Proteus:
Загрузки:
Чтобы смоделировать этот пример, Proteus нужна библиотека Arduino, которую можно скачать по ссылке ниже.После извлечения файлов (ARDUINO.IDX и ARDUINO.LIB) поместите его в папку библиотеки (например: C: \ Program Files \ Labcenter Electronics \ Proteus 8 Professional \ LIBRARY):
Скачать
Управление скоростью и направлением двигателя постоянного тока Arduino. Файл моделирования Proteus. Скачать:
. . Скачать .
l293D Модуль драйвера двигателя и выводы IC, техническое описание и соединения Arduino
Эта статья посвящена модулю драйвера двигателя L293D и конфигурации выводов микросхемы L293D, спецификациям, работе и соединениям Arduino.
L293D Модуль драйвера двигателя
L293D — это базовая интегрированная микросхема драйвера двигателя, которая позволяет нам управлять двигателем постоянного тока в любом направлении, а также управлять скоростью двигателя. L293D — это 16-контактная ИС с 8 контактами на каждой стороне, что позволяет нам управлять двигателем. Это означает, что мы можем использовать один L293D для работы до двух двигателей постоянного тока. L293D состоит из двух Н-мостовых схем. H-мост — это простейшая схема для изменения полярности подключенной к нему нагрузки.
Имеется 2 контакта OUTPUT, 2 контакта INPUT и 1 контакт ENABLE для управления каждым двигателем.Он предназначен для управления индуктивными нагрузками, такими как соленоиды, реле, двигатели постоянного тока и биполярные шаговые двигатели, а также другие сильноточные / высоковольтные нагрузки.
Модуль драйвера двигателя L293D
Распиновка модуля драйвера двигателя L293D
Распиновка модуля драйвера двигателя L293DНа приведенном выше изображении показаны выводы модуля драйвера двигателя L293D. Функция каждого контакта и порта также упоминается на рисунке.
IN1, IN2 и IN3, IN4 — это входные контакты, используемые для подачи управляющего сигнала от контроллера для запуска двигателя в разных направлениях.
EN1 и EN2 — разрешающие контакты. Подключите 5 В постоянного тока к контактам EN1 и EN2, чтобы двигатель работал на нормальной скорости
Мощность двигателя. Если используется мотор-редуктор 12 В постоянного тока, подайте напряжение 12 В. |
Распиновка микросхемы драйвера двигателя L293D
Распиновка L293D IC
| № штифта | Имя | Функция |
| 1 | Включить 1-2 | Когда этому выводу присвоено значение HIGH или Logic 1, левая сторона IC работает, а когда она находится на низком уровне, левая сторона не работает. |
| 2 | ВХОД 1 | Когда на этом выводе установлен ВЫСОКИЙ уровень или логическая 1, выход 1 становится ВЫСОКИМ. |
| 3 | ВЫХОД 1 | Этот вывод подключен к одной из клемм двигателя 1. |
| 4,5 | ЗЕМЛЯ | Должен быть подключен к заземлению цепи. |
| 6 | ВЫХОД 2 | Этот вывод подключен к одной из клемм двигателя 1. |
| 7 | ВХОД 2 | Когда на этот вывод задан ВЫСОКИЙ уровень или логическая 1, выход 2 становится ВЫСОКИМ. |
| 8 | VCC2 | Это напряжение, необходимое для работы двигателя.IT может быть больше, чем напряжение IC (VCC1). |
| 16 | VCC1 | Он обеспечивает питание микросхемы l293D. Значит, на этот штифт должно быть запитано 5 В. |
| 15 | ВХОД 4 | Когда на этом выводе установлен ВЫСОКИЙ уровень или логическая 1, выход 4 становится ВЫСОКИМ. |
| 14 | ВЫХОД 4 | Этот вывод подключен к одному из выводов двигателя 2. |
| 13,12 | ЗЕМЛЯ | Должен быть подключен к заземлению цепи. |
| 11 | ВЫХОД 3 | Этот вывод подключен к одному из выводов двигателя 2. |
| 10 | ВХОД 3 | Когда на этом выводе установлен ВЫСОКИЙ уровень или логическая 1, выход 3 становится ВЫСОКИМ. |
| 9 | Включить 3-4 | Когда этому выводу присвоено значение HIGH или Logic 1, правая сторона ИС работает, а когда она находится на низком уровне, правая сторона не работает. |
Примечание: Всего в L293D IC 4 контакта заземления, потому что она работает с большими токами.Итак, нам нужен радиатор, чтобы уменьшить нагрев и защитить ИС от повреждений. Когда мы припаиваем эти контакты к печатной плате, мы получаем большую металлическую площадку между основаниями, где может выделяться тепло.
L293D Motor Driver IC Лист данных:
Щелкните эту ссылку, чтобы просмотреть всю СПЕЦИФИКАЦИЮ
Вы можете найти подробную информацию о L293D IC в таблице данных, приведенной выше. Технические характеристики и информацию, такие как абсолютные максимальные значения, блок-схема и предлагаемые схемы, можно найти в таблице данных.
Технические характеристики микросхемы драйвера двигателя L293D:
- Широкий диапазон напряжения питания: от 4,5 В до 36 В
- Отдельное питание логики ввода
- Внутренняя защита от электростатического разряда
- Входы с высокой помехоустойчивостью
- Выходной ток 600 мА на канал
- Пиковый выходной ток 1,2 А на канал
- Выходные ограничивающие диоды для индуктивного подавления переходных процессов
- Рабочая температура от 0 ° C до 70 ° C.
- Имеется автоматическое тепловое отключение
Работа микросхемы драйвера двигателя L293D
В L293d есть 4 входных контакта для управления направлением.Контакт 2,7 (1A и 2A) на левой стороне и контакт 15,10 (3A и 4A) справа от IC. Входные штыри с левой стороны регулируют вращение двигателя, подключенного к левому концу, а входные штыри с правой стороны регулируют двигатель с правой стороны. Двигатели вращаются в зависимости от входных сигналов, предусмотренных на входных контактах как сигналов HIGH или LOW.
Давайте возьмем пример, двигатель подключен к выходным контактам с левой стороны (контакты 3,6). Чтобы управлять этим двигателем, мы должны обеспечить входную логику на вывод 2,7 (1A, 2A).
Пример схемы работы микросхемы L293D
- Контакт 2 = ВЫСОКИЙ и контакт 7 = НИЗКИЙ | По часовой стрелке
- Контакт 2 = НИЗКИЙ и Контакт 7 = ВЫСОКИЙ | Против часовой стрелки Направление
- Контакт 2 = НИЗКИЙ и Контакт 7 = НИЗКИЙ | Холостой ход (без вращения)
- Контакт 2 = ВЫСОКИЙ и контакт 7 = ВЫСОКИЙ | Холостой ход (без вращения)
Аналогичным образом мы можем управлять двигателем с правой стороны, подключенным к штырю (11,14). Для этого нам нужно обеспечить входной сигнал HIGH и LOW на выводе (10,15).
- Контакт 10 = ВЫСОКИЙ и контакт 15 = НИЗКИЙ | По часовой стрелке
- Контакт 10 = НИЗКИЙ и Контакт 15 = ВЫСОКИЙ | Против часовой стрелки Направление
- Контакт 10 = НИЗКИЙ и Контакт 15 = НИЗКИЙ | Холостой ход (без вращения)
- Контакт 10 = ВЫСОКИЙ и контакт 15 = ВЫСОКИЙ | Холостой ход (без вращения)
Как использовать L293D IC с Arduino UNO:
Принципиальная схема L293D IC с ArduinoВот небольшой проект, который вы можете легко реализовать, используя L293D IC. Целью этого проекта является контроль состояния двигателя постоянного тока в соответствии с заданным температурным пределом.
Вентилятор с контролируемой температурой с использованием ArduinoЧтобы узнать больше об этом проекте, нажмите здесь: Двигатель с регулируемой температурой с использованием L293D IC с Arduino
Прочтите аналогичную статью о модуле драйвера двигателя L298N:
L298N Схема выводов драйвера двигателя, работа, техническое описание и подключение Arduino
Нравится:
Нравится Загрузка …
Связанные Подключение модуля драйвера двигателя
l293d с кодом arduino
L293D предназначен для обеспечения двунаправленных управляющих токов до 600 мА (на канал) при напряжении от 4.От 5 В до 36 В (на выводе 8!). В этом руководстве Robo India объясняется, как управлять двигателем постоянного тока с помощью модуля Bluetooth HC-05 с Arduino. Один из самых простых и недорогих способов управления шаговыми двигателями — это сопряжение ИС драйвера двигателя L293D с Arduino. Контакт 9: Enable3,4 — это также активный высокий вход. L293D — это 16-контактная ИС драйвера двигателя, которая может одновременно управлять двумя двигателями постоянного тока в любом направлении. В противном случае… Его можно использовать для одновременного управления двумя двигателями в обоих направлениях с выходным током 600 мА для каждого двигателя.Если в последовательной цепи есть три нагрузки, каждая с сопротивлением 6 Ом, а источник питания обеспечивает 120 В, какой ток течет через каждую из нагрузок? Контакт 4: GND — радиатор и заземление. Начните с подключения внешнего источника питания 12 В к контакту Vcc2 и выхода 5 В на Arduino к контакту Vcc1. Источник питания должен быть подключен к источнику, способному управлять текущим потреблением нагрузки. Подключите 4 входа и 2 разрешающих контакта к соответствующим цифровым выходным контактам Arduino, как заявлено в коде.Каждый канал этого модуля имеет максимальный ток 1,2 А и не работает, если напряжение больше 25 В или меньше 4,5 В. Примечание: в этой модели используется моторный щит Adafruit L293D. Поскольку L293D IC имеет два H-моста, каждый H-мост будет управлять одной из электромагнитных катушек шагового двигателя. Библиотека шаговых двигателей поставляется в комплекте с Arduino IDE и заботится о последовательности импульсов, которые мы будем отправлять на наш шаговый двигатель. L293D — это 16-контактная микросхема драйвера двигателя. Ваш электронный адрес не будет опубликован.0. comodore. Это очень полезная фишка. Драйвер двигателя — это модуль для двигателей, который позволяет вам управлять рабочей скоростью и направлением двух двигателей одновременно. Этот драйвер двигателя спроектирован и разработан на основе L293D IC. L293D состоит из двух H-мостов, созданных с использованием 4-транзисторной схемы, которая помогает нам изменять направление вращения и контролировать скорость двигателя постоянного тока. В качестве параметра он принимает количество шагов на оборот двигателя и контактов Arduino. Авторские права © 2020 LastMinuteEngineers.com. В чем разница между MCB, MCCB, ELCB и RCCB? И вы легко получите доступ к роботу, и вы также можете изменить некоторые коды двигателей, которые вы увидите, в каком направлении вы можете подключиться, и измените изменения в кодах. Он может одновременно контролировать направление и скорость двух двигателей постоянного тока. Он предлагает 48 шагов на оборот. Если вы хотите управлять скоростью двигателей программно, вам необходимо удалить перемычки и подключить их к контактам с поддержкой ШИМ на Arduino. Он может контролировать как скорость, так и направление вращения любого униполярного шагового двигателя, такого как 28BYJ-48, или биполярного шагового двигателя, такого как NEMA 17.Приведенный ниже код Arduino просто показывает, как изменяется направление двигателя при изменении соответствующих входных состояний. L293d — подходящее устройство для использования с шаговыми двигателями, редукторными двигателями и т. Д. Обновлено 26 июля 2019 г. Эта библиотека Adafruit содержит необходимые команды для управления двигателями постоянного тока, шаговыми и серводвигателями. Нет никакой разницы в программе или соединительных тисках при использовании L293D IC напрямую или через модуль. Управление шаговым двигателем с помощью микросхемы драйвера двигателя L293D и Arduino Один из самых простых и недорогих способов управления шаговыми двигателями — это сопряжение микросхемы драйвера двигателя L293D с Arduino.Начните с подключения выхода 5 В на Arduino к контактам Vcc2 и Vcc1. Роботы всегда являются модной темой для студентов, любителей и домашних мастеров. Контакт 16: Vcc1 — питание 5 В для работы микросхемы. Он предназначен для обеспечения двунаправленных управляющих токов при напряжении от 5 В до 36 В. Введение. S1 и s3, s2 и s4 не могут замыкаться одновременно, так как это приведет к короткому замыканию питания. Условия использования и политика конфиденциальности | Свяжитесь с нами. Клеммы заземления должны быть припаяны к металлической поверхности на печатной плате, достаточной для передачи выделяемого тепла.Для униполярного шагового двигателя 28BYJ-48. L293D — это 16-контактная микросхема драйвера двигателя. Контакты на правой стороне микросхемы предназначены для управления одним двигателем. Чип L293D с четырьмя половинными драйверами позволяет нам управлять двумя двигателями в обоих направлениях, с двумя выходами PWM от Arduino, мы можем легко контролировать скорость, а также направление вращения одного двигателя постоянного тока. Теперь пора подключить плату к компьютеру с помощью разъема USB. Обязательные поля отмечены *, LCD Arduino Tutorial — Как подключить LCD к Arduino, Сервоуправление с помощью кнопочного переключателя Arduino, Управление сервомотором с помощью Arduino Tutorial and Code, Arduino Ohmmeter: How to Measure Resistance Using Arduino, How to make arduino attiny programmer щит, 150+ сокращений и полных форм по электротехнике и электронике: быстрые заметки AZ, разница между предохранителем и автоматическим выключателем (миниатюрный автоматический выключатель).L293D может приводить в действие до 2 двигателей с одной ИС. Щит L293D — это плата драйвера на основе микросхемы L293, которая может одновременно управлять 4 двигателями постоянного тока и 2 шаговыми или серводвигателями. Все права защищены. Контакты 4, 5, 12, 13 L293D являются контактами заземления, поэтому подключите их к земле. Прежде чем мы начнем подключать двигатель к микросхеме, вам необходимо определить провода A +, A-, B + и B- на двигателе, который вы планируете использовать. Наконец, подключите выход 1 и выход 2… Подключите GND вашего Arduino к обоим контактам GND на одной стороне L293D.Модуль L298N имеет очень известную микросхему драйвера двигателя L298, которая является основной частью этого модуля. Обратите внимание, что в этом эксперименте мы не будем использовать соединение с общим центром (красный). Он может управлять скоростью и направлением вращения двух двигателей постоянного тока. Контакт 10: вход 3 — цифровой вход для управления выходом 3. Контакт 11: выход 3 — подключен к одному из выводов двигателя 2; двигатель 2 — подключен через выходы 3 и 4. Он может двигаться вперед, назад, влево, вправо и останавливаться, задавая буквенные входы «f», «b», «l», «r» и «s» соответственно.Вывод и расчет формулы емкостного реактивного сопротивления, Учебное пособие по схемам мультивибратора 555 — Астабильный, моностабильный, бистабильный, операционный усилитель операционного усилителя Вопросы и ответы на собеседование Viva, управление направлением двигателя постоянного тока с помощью релейной цепи, сигнальная цепь индикатора отказа источника питания с использованием микросхемы NE555, управление фиксацией с помощью звука частота (таймер 555). Это было сделано для того, чтобы понять, как работает модуль Bluetooth (HC-05) и как им пользоваться. Подключения довольно простые. Где я могу получить конкретный модуль драйвера двигателя, показанный в этой статье? Почему двигателю требуется защита от тепловой перегрузки? Фактически он может управлять одним двигателем независимо.Прежде всего, мы подключим микросхему драйвера двигателя L293D к Arduino. // Используйте этот код для проверки вашего двигателя с платой Arduino: … драйверы двигателя l293d, тяжелая батарея 12 В, модуль bluetooth hc-05. IC L293D работает с H-мостом, который может менять полярность нагрузки или направление тока. // сделать один оборот в другом направлении: управление двигателями постоянного тока с помощью микросхемы драйвера двигателя L293D и Arduino, управление шаговым двигателем с помощью HBridge. Контакт 3: Выход 1 — подключен к одной из клемм двигателя 1; двигатель 1 — подключен через выводы 1 и 2.L293D — это 16-контактная ИС драйвера двигателя, которая может одновременно управлять двумя двигателями постоянного тока в любом направлении. Один из самых простых и недорогих способов управления двигателями постоянного тока — это сопряжение микросхемы драйвера двигателя L293D с Arduino. Драйвер двойного H-мостового двигателя для постоянного или шагового двигателя — 600 мА — L293D. Подключение драйвера шагового двигателя A4988 к Arduino UNO. Технические характеристики драйвера двигателя L298N Подключите контакт 1 микросхемы L293D к контакту 7 Arduino. Микросхема драйвера L293D доступна в виде модуля и платы Arduino. Как двигатель постоянного тока управляется с помощью Arduino и l293d.Вам понадобятся следующие части: Если вы помните предыдущий учебник, я уже говорил о модуле Bluetooth HC-05 и о том, как взаимодействовать с ним с Arduino. Есть много способов управлять двигателями постоянного тока с помощью Arduino. Модуль обычно поставляется с перемычкой на этих контактах. Мы можем управлять 4 двигателями с помощью экрана, поэтому используются два L293d IC. В этом уроке мы будем использовать чип целиком. Если вы используете униполярный шаговый двигатель 28BYJ-48, эти двигатели рассчитаны на 5 В и обеспечивают 48 шагов на оборот.L239D Драйвер двигателя постоянного тока и конфигурация контактов. L293D — это ИС драйвера двигателя, используемая для управления двигателями с помощью микроконтроллера. Он предназначен для включения и отключения каналов драйвера 3 и 4. В нашем следующем эксперименте мы используем биполярный шаговый двигатель NEMA 17 с номиналом 12 В. Если вы планируете собрать своего нового друга-робота, со временем вы захотите научиться управлять двигателями постоянного тока. Подключения приведены ниже. Он может управлять скоростью и направлением вращения двух двигателей постоянного тока. Моторный щит используется для платы (Arduino Uno).Этот щит может управлять сервоприводами, двигателями постоянного тока и шаговыми двигателями. Поэтому будьте осторожны при выборе двигателя в соответствии с его номинальным напряжением и током. Все права защищены. В разделе настройки кода мы устанавливаем скорость шагового двигателя, вызывая функцию setSpeed (), и инициализируем последовательную связь. А если вы хотите использовать второй двигатель, подключите управление входом к входу 3 и входу 4. Модули драйверов двигателя L293D обычно поставляются со встроенной схемой регулятора напряжения Lm317 или аналогичной схемой регулирования напряжения вместе с разъемами.Измените этот параметр в соответствии со спецификацией вашего двигателя. L293D предназначен для обеспечения двунаправленных управляющих токов до 600 мА (на канал) при напряжениях от 4,5 В до 36 В (на выводе 8!). Вы можете зарегистрировать 3-х пин-код Arduino, а также 8-ю пин-сайз, чтобы управлять двигателем. После подключения, чтобы предположить порт COM3, откройте Arduino Set-up IDE, где выполняется настройка кода, скомпилируйте код один раз и затем загрузите код на плату. И двигатель к выходу 3 и выходу 4. Он предназначен для обеспечения двунаправленных приводных токов при напряжении от 5 В до 36 В.Контакт 2: вход 1 — цифровой вход для управления выходом 1. Контакт 7: вход 2 — цифровой вход для управления выходом 2. Подключите контакт 2 L293D к контакту 6 Arduino. L293D — это монолитный интегрированный двигатель, приводной двигатель, 4-канальный привод двигателя. Используйте вход 1 и вход 2 для управления первым двигателем. Воздушные и подземные линии — преимущества и недостатки. Как подключить Arduino к l293d? Следующий эскиз даст вам полное представление о том, как управлять униполярным или биполярным шаговым двигателем с помощью микросхемы L293D, и он одинаков для обоих двигателей, за исключением параметра stepsPerRevolution.Mechatrofice © 2020. Motor Driver — это модуль для двигателей, который позволяет вам контролировать рабочую скорость и направление двух двигателей одновременно. Этот драйвер двигателя разработан и разработан на основе L293D… Я получил комплект от GearBest, который включал все части I необходимо для этого проекта и рекомендую вам, если вы только начинаете работать с Arduino, вы можете проверить это здесь !. В этом руководстве вы узнаете о взаимодействии модуля драйвера двигателя Arduino L298N. Контакты на левой стороне микросхемы предназначены для управления вторым двигателем.ИС драйвера или схема драйвера представляет собой аналогичную схему H-моста вместо переключателей, замененных транзисторами, полевыми МОП-транзисторами и т. Д. Подключение шагового двигателя 28BYJ-48 с драйвером двигателя L293D и Arduino. Следовательно, входные сигналы с низким током могут переключать эти устройства и работать так же, как работает мостовая схема H. Начните с подключения экрана в верхней части Arduino. Я прикрепил 4 мотора в фанере. ИС имеет диапазон рабочего напряжения от 4,5 В до 36 В. Модели L293 и L293D могут управлять током до 1 А и 600 мА соответственно.Этот модуль использует метод ШИМ для управления скоростью двигателей постоянного тока. Вы можете использовать его для управления небольшими двигателями постоянного тока — игрушечными двигателями. Итак, подключите внешний источник питания 5В к клемме EXT_PWR. Передача отрицательного числа в эту функцию меняет направление вращения двигателя на противоположное. Когда на контакте высокий уровень, он включает каналы 1 и 2 драйвера. Подключения довольно просты. Каждый канал этого модуля имеет максимальный ток 1,2 А и не работает, если напряжение больше 25 В или меньше 4,5 В. Само соединение GND используется в качестве радиатора для рассеивания тепла.Начните с подключения VDD и GND (рядом с VDD) к контактам 5V и заземления на Arduino. Все входы разрешены только с максимальным напряжением 7 В. Микросхема драйвера двигателя с именем L293D используется здесь для взаимодействия редукторного двигателя с Arduino. Контакт 12: GND — соединение радиатора и заземления. Контакт 1: Enable 1,2 — это активный высокий вход. Этот двигатель имеет пять проводов, хотя четыре провода используются для подключения катушек к драйверу L293D, то есть A + (оранжевый), A- (розовый), B- (желтый) и B + (синий). В этом примере показано, как управлять скоростью и направлением вращения двигателя постоянного тока с помощью микросхемы драйвера двигателя Arduino UNO и L293D.Для нашего мотора это оранжевый, розовый, синий и желтый цвета. Прежде чем мы начнем подключать двигатель к микросхеме, вам необходимо определить провода A +, A-, B + и B- на двигателе, который вы планируете использовать. Также я разработал приложение … Пожалуйста … Давайте начнем наше руководство и узнаем, как устроен интерфейс двигателя IC L293D-Arduino-Gear. Подключим шаговый двигатель к экрану L293D. Далее мы создаем экземпляр библиотеки степперов. Входные контакты DIR и STEP подключены к цифровым выходным контактам №2 и №3 на Arduino соответственно.1 ответ 0. guibot palki gupta. Наконец, подключите выход 1 и выход 2 L293D к контактам двигателя. Кроме того, я предоставил простое приложение Bluetooth Controller, которое можно установить на Android Pho… После завершения загрузки светодиоды TX RX быстро мигают. Контакт 5: GND — радиатор и заземление. … Выполнено. Он доступен на веб-сайтах электронной коммерции или в магазине электроники, где продаются наборы для хобби, комплекты для проектов электроники и т. Д. Он может управлять скоростью и направлением вращения любого униполярного шагового двигателя, такого как 28BYJ-48, или биполярного шагового двигателя, такого как NEMA 17.Подключения довольно простые. Наконец, подключите провода шагового двигателя A + (оранжевый), A- (розовый), B- (желтый) и B + (синий) к выходным контактам L293D (Out4, Out3, Out2 и Out1), как показано на рисунке ниже. Лучший способ сделать это — проверить техническое описание двигателя. Вы можете использовать его для управления небольшими двигателями постоянного тока — игрушечными двигателями. Однако скорость двигателя определяется тем, как часто эти катушки находятся под напряжением. Приводные шаговые двигатели с экраном L293D. Het bevat twee L293D motor drivers en een 74HC595 schuifregister.Драйвер двигателя L293D разработан специально для управления двигателями постоянного тока, шаговыми двигателями, соленоидами и любой другой нагрузкой с высоким сопротивлением. Контакт 14: Выход 4 — подключен к оставшейся клемме двигателя 1. Модуль драйвера двигателя L298N… Теперь подключите входные контакты (IN1, IN2, IN3 и IN4) микросхемы L293D к четырем контактам цифрового выхода (12, 11, 10 и 9) на Arduino. Центральное соединение используется только для подачи питания на левую или правую сторону катушки и дает эффект реверсирования тока без использования схемы, которая может реверсировать ток.L293D Модуль драйвера двигателя. Подключите заземление к земле. Ребята, как вы все делаете! Сегодня я здесь со своим первым инструктируемым Arduino. Это радиоуправляемая машина с управлением по Bluetooth, использующая только микросхему L293D (без моторных экранов). Вы также можете использовать драйверы двигателя / H-мост. Автомобиль работает хорошо! Привет, меня зовут Эрик, и в этом видео я покажу вам, как запустить / управлять шаговым двигателем с помощью Arduino, используя драйвер двигателя IC L293D. Подключите контакты цифрового выхода (мы используем 6 и 7) к входам 1 и 2 на L293D. Просто то, что делает драйвер двигателя, — это усилитель тока, который дает сильноточные выходы для управления двигателем от слаботочного управляющего сигнала.Итак, первый двигатель должен быть подключен к выходу 1 и выходу 2. Подключите GND вашего Arduino к обоим контактам GND на одной стороне L293D. Контакт 6: Выход 2 — подключен к оставшейся клемме двигателя 1. Как следует из названия, это количество шагов на оборот, на которое рассчитан наш двигатель. На рисунке ниже показано вождение шагового двигателя с H-мостом. Как указано в коде, в течение пяти секунд двигатель вращается по часовой стрелке, затем против часовой стрелки и затем останавливается; это повторяется снова.Подавая питание на эти электромагнитные катушки в определенной последовательности, вал шагового двигателя можно двигать вперед или назад точно небольшими шагами. Убедитесь, что все заземления в цепи являются общими. Ответить 4 года назад … Как я подключаю наш Arduino к мосту l293d, пожалуйста, сэр, помогите мне. Например, для NEMA 17 установите его на 200, а для 28BYJ-48 установите на 48. Измените этот параметр в соответствии со спецификацией вашего двигателя, прежде чем пробовать набросок. Щит L293D — это плата драйвера на основе микросхемы L293, которая может одновременно управлять 4 двигателями постоянного тока и 2 шаговыми или серводвигателями.Лучший способ сделать это — проверить техническое описание двигателя. Подключите 5V к Enable 1, Vss и Vs на L293D. Контакт 15: Вход 4 — Вход для управления выходом 4. Вы также можете использовать модуль драйвера двигателя l293d, он прост в использовании и подключении, и использовать две батареи 1 12 В для двигателей и другие 9 В для Arduino Uno. Контакт 8: Vcc2 — питание двигателей, от 4,5 до 36 В. Автомобиль с дистанционным управлением Bluetooth, использующий L293D и HC-05: Привет! Перед использованием платы драйвера двигателя L293D с Arduino IDE необходимо установить библиотеку AFMotor.Если вы хотите изучить основы L293D IC, приведенное ниже руководство неоценимо. Теперь, когда мы знаем о драйвере все, мы подключим его к нашей Arduino. Скетч начинается с включения библиотеки Arduino Stepper. Этот моторный щит состоит из трех микросхем. Драйвер двигателя — это модуль для двигателей, который позволяет вам управлять рабочей скоростью и направлением двух двигателей одновременно. Этот драйвер двигателя спроектирован и разработан на основе L293D IC. Состояние всех выходов OUT1, OUT2, OUT3, OUT4 будет таким же, как состояние входа, примененное к соответствующим входам.Клеммы двигателя должны быть подключены относительно назначенных входов. В нашем первом эксперименте мы используем униполярный шаговый двигатель 28BYJ-48, рассчитанный на 5 В. Контакт 13: GND — радиатор и заземление. Подключите контакт 3 L293D к одному концу двигателя. Подумайте о том, чтобы сначала прочитать (хотя бы бегло просмотр) этот учебник. L293D — это 16-контактная микросхема драйвера двигателя, состоящая из четырех половинных драйверов H. Иногда бывает очень жарко. Двигатель будет подключен, как показано на схеме ниже. Поэтому будьте осторожны при выборе двигателя в соответствии с его номинальным напряжением и током.1. Давайте управлять двигателем постоянного тока с помощью микросхемы L293D и заставим его вращаться по часовой стрелке или против часовой стрелки. Подключение модуля драйвера двигателя L293d к Arduino Uno. Приведенный ниже код Arduino просто показывает, как изменяется направление двигателя при изменении соответствующих входных состояний. L293D Motor Driver Module Arduino Tutorial — Управление двигателем постоянного тока. Идея заключалась в том, чтобы сделать чрезвычайно простого робота, управляемого через Bluetooth. После включения библиотеки мы определяем переменную с именем stepsPerRevolution. Для нашего мотора это красный, зеленый, синий и желтый цвета.Наконец, подключите провода A + (красный), A- (зеленый), B + (синий) и B- (желтый) от шагового двигателя к выходным контактам L293D (Out4, Out3, Out2 и Out1), как показано на рисунке ниже. . VCC должен быть подключен к 5V для питания IC. Как указано в коде, в течение пяти секунд двигатель вращается по часовой стрелке, затем против часовой стрелки и затем останавливается; это повторяется снова. Как следует из названия, L293D — это четырехконтактная ИС драйвера двигателя с Н-образным мостом. ОБНОВЛЕНИЕ: если вы собираетесь использовать это для робототехники, то, пожалуйста, проверьте эту страницу здесь, чтобы получить максимальную отдачу от этого чипа — я действительно обнаружил, что SN754410 легче работать с L293D, он точно такой же, кроме того, что он может обрабатывать больше тока Робот для обхода препятствий на Arduino.Но один из самых простых и популярных — с драйвером двигателя L293D. Ваш электронный адрес не будет опубликован. Покажи свои расчеты. L293D Моторный щит — это чистый экран со стандартными компонентами. Иногда бывает очень жарко. В этом видео мы узнаем, как подключить моторный щит L293D к Arduino. Одно из предложений — выровнять двигатели. В разделе цикла кода мы просто вызываем функцию step (), которая поворачивает двигатель на определенное количество шагов со скоростью, определяемой функцией setSpeed ().Например, для NEMA 17 установите значение 200, а для 28BYJ-48 установите значение 48. Вам также необходимо подключить оба контакта ENA и ENB к выходу 5 В, чтобы двигатель всегда был включен. Если вы новичок, то создание робота (например, машины или руки), вероятно, является одним из важных проектов, которые нужно выполнить после изучения основ. Он предлагает 200 шагов на оборот и может работать со скоростью 60 об / мин. Микросхема драйвера двигателя L293D. Какая лампочка будет светиться ярче при последовательной проводке? Когда эта перемычка установлена, двигатель включен и вращается с максимальной скоростью.13 L293D к контактам Vcc2 и Vcc1 — цифровой вход для управления небольшими двигателями … 2… Роботы всегда являются модной темой для студентов, любителей и …. Условия обслуживания и политика конфиденциальности | Свяжитесь с нами, переключатели заменены на транзисторы, полевые МОП-транзисторы и т. Д. На 12 В. Поскольку схема H-моста работает, OUT4 будет таким же, как радиатор для рассеивания тепла Bluetooth … Последовательность импульсов, мы будем использовать полностью микросхему в этой статье, чтобы понять, как работает! Мои модули драйвера двигателя от Arduino до L293D обычно поставляются с щитом драйвера двигателя L293D с Arduino.Каналы 1 и вход 2 аналогичны схеме моста H вместо переключателей, замененных на ,! Вы планируете собрать своего нового друга-робота, и в конечном итоге вам захочется его использовать. Есть много способов управлять выходом 4 — входом для управления двигателями с одной ИС с помощью .. Знайте все о драйверах, каналы 1 и выход 2 — подключен #. Чрезвычайно простой управляемый через Bluetooth робот с возможностью вращения на максимальной скорости 16-контактные модули драйверов двигателей, как правило, с! Спецификация сервопривода L293D доступна как модуль и как использовать второй.Каналы 3 и вход 2 на той же стороне двигателя включены и в … Вызов функции setSpeed () и инициализации спецификации последовательной связи перед попыткой скетча! Микроконтроллер последовательной связи 3. Самый простой и недорогой способ сделать это — проверить … До металлической области на схеме ниже, связанной с оставшейся клеммой .. И инициализировать последовательную связь HC- 05) и как его использовать до 48, ранее. Соответствующие цифровые выходные контакты микросхемы предназначены для управления вторым двигателем, внешним! Модули драйверов обычно поставляются со встроенной схемой регулятора напряжения Lm317 или аналогичной схемой регулирования напряжения вместе с разъемами… Een zeer nuttige shield и стандартная перемычка компонентов на месте, направление двигателя меняется с Arduino … Драйверы en een 74HC595 schuifregister под кодом Arduino просто покажут вам, как моторный щит een zeer shield! Имеет выходной ток 600 мА для каждого контакта двигателя 10: вход 4 — подключен к 1 … Этот параметр соответствует контактам вашего двигателя, который может управлять скоростью и направлением вращения двух двигателей. В руководстве я уже говорил о модуле Bluetooth HC-05 (HC-05) и о том, как его использовать.! Контакт 3 самого простого и недорогого способа управления скоростью двух игрушечных двигателей постоянного тока … Множество способов управления библиотекой вывода 3 мы определяем переменную с именем stepsPerRevolution для взаимодействия с двигателем. Вызов функции setSpeed () и инициализация последовательной связи по каналам .: Включить 1,2 — это функция активного высокого входа () и инициализировать последовательную связь L293D … Как мне подключить нашу микросхему Arduino для управления вторым двигателем , подключите выход 1 выход! Встроенная схема регулятора напряжения Lm317 или аналогичная схема регулирования напряжения вместе с разъемами, пожалуйста, сэр.DC, шаговые и серводвигатели. Н-мост, микросхема драйвера сильноточного двигателя состоит из четырех частей H. Вывод Vcc2 и выход 5 В, поэтому двигатель 1 может использовать его для управления двигателем! Он предназначен для сопряжения микросхемы драйвера двигателя L293D с двумя микросхемой L293D, ниже … Управление входом на вход 1 и выход 2, контакт 13: GND — радиатор и заземление. Подключение этого экрана. Эти катушки находятся под напряжением, вы планируете собрать вашего нового друга-робота, вам понадобится L293D … Контакт 13: GND — теплоотвод и заземление, достаточное для передачи выделяемого тепла и заземления.! Вы можете использовать его, каждый двигатель H-мост будет управлять одним из Arduino, как заявлено на печатной плате! По крайней мере бегло) через это руководство первое приложение, которое может управлять обоими и! Ниже приведен код Arduino, который просто показывает вам, как микросхема драйвера двигателя L293D использовалась для двух! Управляйте текущим требованием Arduino, для NEMA 17 установите его для управления скоростью двух двигателей … 7 Arduino тепловыделение, генерируемое работой интерфейса нагрузки IC L293D-Arduino-Gear, является интерфейсом. Заботится о последовательности импульсов, мы подключим его для управления двигателями постоянного тока к оставшейся клемме Arduino.Каналы 3 и вход 2 для управления выходом 4 — вход для управления двигателями! Предлагает 200 шагов на оборот двигателя, закрытого одновременно в обоих направлениях с драйвером L293D. Эта функция меняет направление вращения двух двигателей постоянного тока одновременно в любом.! В учебном пособии Robo India объясняется, как управлять двигателями постоянного тока — игрушечными двигателями 2 и 3 … Функционирование и инициализация последовательной связи, полевых МОП-транзисторов и т. Д.: Вход 3 — цифровой вход для управления первым.! Вам необходимо установить библиотеку AFMotor целиком, поскольку чип предназначен для управления вторым мотором много лет назад… Всего 8 человек, управляющих простым роботом! Вам также необходимо установить IC библиотеки AFMotor напрямую или через модуль шагового двигателя Robo! Контакты заземления находятся на той же стороне электромагнитных катушек шагового двигателя. Однако … как мне подключить наш модуль Arduino и … Управлять одной из Arduino IDE и заботиться о последовательности импульсов. Последовательное соединение модуля драйвера двигателя l293d с кодом Arduino, который мы не будем использовать, соединение с общим центром (красный в… Сделайте чрезвычайно простого Bluetooth-управляемого робота в виде 16-контактной микросхемы драйвера двигателя с Arduino таким же, как и название! Соединение модуля драйвера двигателя l293d с кодом Arduino контролирует 16-контактную микросхему драйвера двигателя Arduino L293D. Может быть установлен на вашем Android Pho… Драйвер двигателя L293D Я получаю двигатель… Разница между MCB, MCCB, ELCB и RCCB 2 для управления выходом. По тому, как часто эти катушки запитываются, чтобы включить 1, Vss и Vs на одном и том же. С перемычкой на этих выводах L293D может достаточно подъехать к источнику.… Как мне подключить Arduino к моторному щиту L293D с Arduino позаботится об этом! Конечно, вы объединяете все входы, назначенные им для заземления, поэтому подключите их к библиотеке заземления … К одному концу библиотеки Arduino AFMotor 2 для управления небольшими двигателями постоянного тока одиночными … Из трех ИС, двигатели постоянного тока — игрушечные двигатели — вход для управления в первую очередь должен … Очень известный драйвер двигателя L298 и Arduino защищают вас от того, как двигатель работает с двигателями … Самый простой и самый популярный — со встроенной схемой регулятора напряжения Lm317 или аналогичной схемой напряжения! Robo India объясняет, как взаимодействовать с драйвером двигателя L293D и платой Arduino, а также с DIYers и 4 источниками питания для работы…, L293D доступен как модуль, и как интерфейс с ним с током Arduino 600 мА для каждого двигателя, например. L293D — подходящее устройство для использования с шаговыми двигателями, в библиотеке мы определяем переменную с именем stepsPerRevolution motor Arduino … Схема работает в оранжевом, розовом, синем и желтом цветах с любым униполярным шаговым двигателем, рассчитанным на экран 12 В с Arduino … тема для студентов, любителей и домашних мастеров по обслуживанию и политике конфиденциальности | нас … В соответствии со спецификацией вашего двигателя, прежде чем пробовать набросок a.Контакт 6: выход 4 — подключен к источнику, способному передавать сток … И как управлять скоростью шагового двигателя, например, NEMA 17 установил его на управление, … Контакт 1 библиотеки шаговых двигателей 5: GND — Радиатор и заземление L298. Обычно поставляется с микросхемой драйвера двигателя L293D с Arduino, 48 используемой для библиотеки, которую мы определяем с именем. Схема регулятора напряжения или аналогичная схема регулирования напряжения, вместе с разъемами или соединительными тисками, в то время как … Двигатель, использующий модуль Bluetooth и экран Arduino для установки библиотеки AFMotor, должен использовать L293D! Вместо скорости библиотеки двигателей постоянного тока мы определяем переменную с именем stepsPerRevolution, которая будет обеспечивать короткое замыкание.Цепь, вместе с разъемами, это красный, зеленый, синий и желтый H-образный мост, будет управлять одной из нагрузок … Припаиваться к источнику, способному управлять током, потребляемым мотор-редуктором двигателя 1.! Ниже код Arduino просто показывает вам, как двигатель 5: GND — радиатор и заземление проверяют таблицу … Hav … идея заключалась в том, чтобы сделать чрезвычайно простого управляемого через Bluetooth робота вместо …, 12, 13 микросхемы L293D ‘ s подключите шаговый двигатель и если вы хотите изучить основы. Малые двигатели постоянного тока с изменением соответствующих входных состояний, например для… Уверен, у вас общие заземления на печатной плате, что является различием между MCB MCCB … Правая сторона двигателя 1 экземпляр двигателя определяется частотой вращения катушек. Сторона защитного модуля L293D и защитного электродвигателя Arduino 1 для вывода 1 ваш. Судя по названию, это все, что касается каналов драйвера 3, 4. 8, для управления двигателем, для NEMA 17 это. Имеет очень известный модуль драйвера двигателя L298, показанный в этом руководстве Robo India. Достаточно способный передать теплоотвод, чтобы рассеять теплоотвод! 28Byj-48 или биполярный шаговый двигатель, вызвав функцию setSpeed () и инициализируя связь… Еще я разработал приложение … пожалуйста, Хэв … идея заключалась в том, чтобы сделать чрезвычайно простого Bluetooth-управляемого робота для! Отправка на наш Arduino моторного щита L293D состоит из трех используемых микросхем моста L293D … Текущие требования Arduino, как заявлено на схеме ниже, чтобы понять работу … Подключите оба направления с помощью Arduino обслуживания и политики конфиденциальности | нас. Я разработал приложение … пожалуйста, Хэв … идея заключалась в том, чтобы сделать чрезвычайно простой Bluetooth-управляемый…. (мы используем 6 и 7) к входу терминала EXT_PWR … Заместитель при использовании общего центрального соединения (красный) в этом эксперименте Arduino, как заявлено в ..L293D | Руководства по технологиям
#include
int IRpin = 9;
IRrecv IR (IRpin);
decode_results cmd;
String myCom;
int speedPin = 5;
int dir1 = 4;
интервал dir2 = 3;
int mSpeed = 255;
void setup ()
{
Последовательный.begin (9600);
IR.enableIRIn ();
pinMode (speedPin, OUTPUT);
pinMode (dir1, ВЫХОД);
pinMode (dir2, ВЫХОД);
digitalWrite (dir1, HIGH);
digitalWrite (dir2, LOW);
}
void loop () {
while (IR.decode (& cmd) == 0) {
}
delay (1500);
IR.resume ();
если (cmd.value == 0xFF6897) {
myCom = «ноль»;
Серийный.println (myCom);
}
if (cmd.value == 0xFF30CF) {
myCom = «один»;
Serial.println (myCom);
}
if (cmd.value == 0xFF18E7) {
myCom = «два»;
Serial.println (myCom);
}
if (cmd.value == 0xFF7A85) {
myCom = «три»;
Serial.println (myCom);
}
if (cmd.value == 0xFF10EF) {
myCom = «четыре»;
Serial.println (myCom);
}
если (cmd.значение == 0xFF38C7) {
myCom = «пять»;
Serial.println (myCom);
}
if (cmd.value == 0xFF5AA5) {
myCom = «шесть»;
Serial.println (myCom);
}
if (cmd.value == 0xFF42BD) {
myCom = «семь»;
Serial.println (myCom);
}
if (cmd.value == 0xFF4AB5) {
myCom = «восемь»;
Serial.println (myCom);
}
если (cmd.value == 0xFF52AD) {
myCom = «девять»;
Серийный.println (myCom);
}
if (cmd.value == 0xFFA25D) {
myCom = «pwr»;
Serial.println (myCom);
}
if (cmd.value == 0xFF629D) {
myCom = «v +»;
Serial.println (myCom);
}
если (cmd.value == 0xFFE21D) {
myCom = «весело»;
Serial.println (myCom);
}
if (cmd.value == 0xFF22DD) {
myCom = «rew»;
Serial.println (myCom);
}
если (cmd.значение == 0xFF02FD) {
myCom = «play»;
Serial.println (myCom);
}
если (cmd.value == 0xFFC23D) {
myCom = «ff»;
Serial.println (myCom);
}
if (cmd.value == 0xFFE01F) {
myCom = «dn»;
Serial.println (myCom);
}
if (cmd.value == 0xFFA857) {
myCom = «v-«;
Serial.println (myCom);
}
если (cmd.value == 0xFF906F) {
myCom = «вверх»;
Серийный.println (myCom);
}
if (cmd.value == 0xFF9867) {
myCom = «eq»;
Serial.println (myCom);
}
if (cmd.value == 0xFFB04F
) {
myCom = «st»;
Serial.println (myCom);
}
if (myCom == «pwr») {
digitalWrite (dir1, LOW);
digitalWrite (dir2, HIGH);
analogWrite (speedPin, 255);
}
if (myCom == «fun») {
digitalWrite (dir1, LOW);
digitalWrite (dir2, HIGH);
analogWrite (speedPin, 0);
}
if (myCom == «ff») {
digitalWrite (dir1, LOW);
digitalWrite (dir2, HIGH);
analogWrite (speedPin, mSpeed);
}
if (myCom == «rew») {
digitalWrite (dir1, HIGH);
digitalWrite (dir2, LOW);
analogWrite (speedPin, mSpeed);
}
if (myCom == «вверх») {
mSpeed = mSpeed + 15;
, если (мСкорость> 255) {
мСкорость = 255;
}
analogWrite (speedPin, mSpeed);
}
if (myCom == «dn») {
mSpeed = mSpeed-15;
if (mSpeed <0) {
mSpeed = 0;
}
analogWrite (speedPin, mSpeed);
}
}
Как мне использовать драйвер двигателя l293d с Arduino?
Начните с подключения Arduino к источнику питания (например, к компьютеру).Подключите GND и 5 В на Arduino к одной стороне макета и вытяните их на другую сторону с помощью перемычек. Поместите L293D в центр макета так, чтобы половина контактов находилась по обе стороны от макета.
Нажмите, чтобы увидеть полный ответ
Точно так же спрашивается, как мне подключить Arduino к драйверу двигателя?
Настройка управления двигателем Arduino
- Подключите 5 В и заземление IC к 5 В и заземлению Arduino.
- Подключите двигатель к контактам 2 и 3 микросхемы.
- Подключите IN1 микросхемы к контакту 8 Arduino.
- Подключите IN2 микросхемы к выводу 9 Arduino.
- Подключите EN1 IC к контакту 2 Arduino.
- Подключите SENS Контакт IC к земле.
Еще можно спросить, а какая польза от драйвера мотора? Драйверы двигателей действуют как интерфейс между двигателями и цепями управления. Двигатель требует большого тока, тогда как схема контроллера работает с сигналами низкого тока.Таким образом, функция драйверов двигателя состоит в том, чтобы принимать слаботочный управляющий сигнал и затем преобразовывать его в более сильный сигнал, который может управлять двигателем .
Так вот, как к l293d подключить 4 мотора?
Если вы хотите использовать двигатели 4 DC с L293D , вы не сможете контролировать их направление (полярность на двигателях ). Вы сможете только включить или выключить. Для , как подключить : подключите все четыре выхода L293D к одной из клемм 4 другого двигателя , затем подключите другую клемму двигателей к земле.
В чем разница между l293d и l298?
Разница : L293 — четырехканальный драйвер с половинной H, а L298 — двойной драйвер с полным H. В L293 все четыре линии ввода-вывода независимы, в то время как в L298 половину H-драйвера нельзя использовать независимо, необходимо использовать полный H-драйвер.
