Как подключить L293D Motor Shield к Arduino. Как запрограммировать управление двигателями через L293D. Какие возможности предоставляет драйвер L293D для работы с моторами.
Особенности и возможности драйвера моторов L293D
L293D Motor Shield представляет собой плату расширения для Arduino, предназначенную для управления электродвигателями. Основные характеристики и возможности этого драйвера:
- Позволяет одновременно управлять до 4 коллекторных DC моторов или 2 шаговых двигателей
- Имеет 2 микросхемы L293D для управления моторами
- Обеспечивает ток до 600 мА на канал (пиковый до 1.2 А)
- Диапазон напряжения питания моторов: 4.5-36 В
- Встроенные защитные диоды для подавления выбросов напряжения
- Возможность управления скоростью моторов с помощью ШИМ
- Дополнительные разъемы для подключения 2 сервоприводов
Таким образом, L293D Motor Shield значительно упрощает подключение различных типов двигателей к Arduino и позволяет реализовать сложные алгоритмы управления моторами в проектах робототехники.
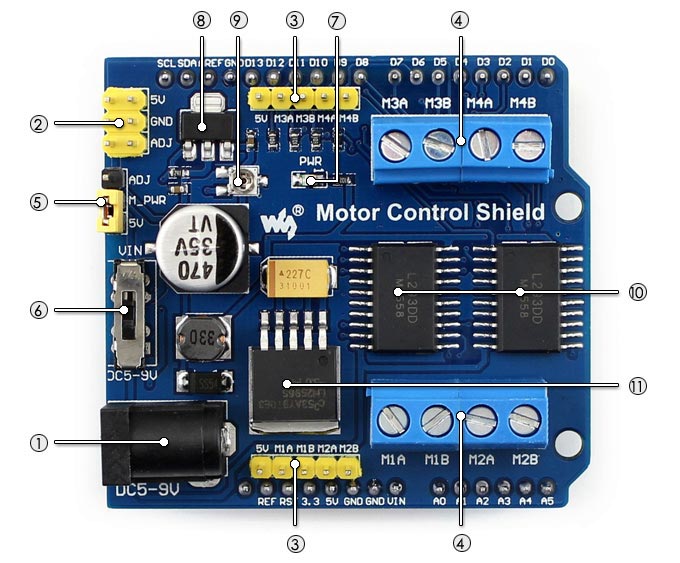
Схема подключения L293D Motor Shield к Arduino
Подключение L293D Motor Shield к Arduino осуществляется очень просто — плата устанавливается сверху на Arduino, совмещая соответствующие контакты. При этом важно учитывать следующие моменты:
- Питание силовой части (моторов) может осуществляться двумя способами:
- От одного источника через разъем питания Arduino (6-12 В)
- От отдельного источника питания 4.5-36 В, подключенного к клеммам Vs и GND на Motor Shield
- Для питания от отдельного источника необходимо снять перемычку (джампер) рядом с клеммами питания на Motor Shield
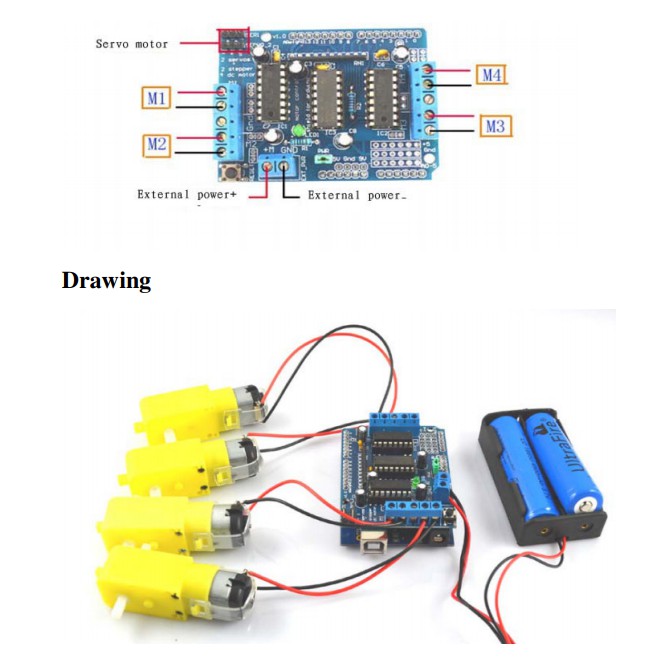
- Двигатели постоянного тока подключаются к клеммам M1, M2, M3, M4
- Шаговые двигатели подключаются к клеммам M1-M2 и M3-M4
- Сервоприводы подключаются к специальным 3-пиновым разъемам на плате
Такая схема подключения обеспечивает надежное соединение и позволяет легко управлять различными типами моторов с помощью Arduino.
Программирование L293D Motor Shield на Arduino
Для программирования L293D Motor Shield удобно использовать библиотеку AFMotor. Она предоставляет простой программный интерфейс для управления моторами. Основные шаги по работе с библиотекой:
- Установка библиотеки AFMotor через менеджер библиотек Arduino IDE
- Подключение библиотеки в скетче: #include <AFMotor.h>
- Создание объектов моторов: AF_DCMotor motor1(1); // Мотор 1
- Управление скоростью: motor1.setSpeed(200); // Скорость 0-255
- Управление направлением: motor1.run(FORWARD); // Вперед
Пример простого скетча для управления DC мотором:
#include <AFMotor.h> AF_DCMotor motor(1); void setup() { motor.setSpeed(200); } void loop() { motor.run(FORWARD); delay(1000); motor.run(BACKWARD); delay(1000); }
Этот код будет вращать мотор попеременно вперед и назад с интервалом в 1 секунду. Библиотека AFMotor значительно упрощает программирование сложных алгоритмов управления моторами.
Управление скоростью моторов с помощью ШИМ
Одно из главных преимуществ L293D Motor Shield — возможность плавного управления скоростью моторов с помощью широтно-импульсной модуляции (ШИМ). Как это работает?
- ШИМ-сигнал подается на выводы EN (Enable) микросхем L293D
- Частота ШИМ по умолчанию составляет около 1 кГц
- Скорость задается в диапазоне 0-255 методом setSpeed()
- 0 соответствует остановке мотора, 255 — максимальной скорости
- Промежуточные значения позволяют плавно регулировать скорость
Пример кода с плавным изменением скорости:
AF_DCMotor motor(1);
void setup() {
motor.run(FORWARD);
}
void loop() {
for (int i = 0; i < 255; i++) {
motor.setSpeed(i);
delay(20);
}
for (int i = 255; i > 0; i--) {
motor.setSpeed(i);
delay(20);
}
}
Этот код будет плавно увеличивать и уменьшать скорость мотора. Такое управление позволяет реализовать более сложные и точные алгоритмы движения в робототехнических проектах.
Подключение и управление шаговыми двигателями
L293D Motor Shield также позволяет легко подключать и управлять шаговыми двигателями. Основные моменты при работе с шаговыми моторами:
- Шаговый двигатель подключается к двум парам выходов: M1+M2 или M3+M4
- В библиотеке AFMotor используется класс AF_Stepper для управления
- Можно задавать скорость вращения в оборотах в минуту
- Доступны различные режимы шага: SINGLE, DOUBLE, INTERLEAVE, MICROSTEP
- Точное позиционирование с помощью метода step(steps, direction, style)
Пример кода для управления шаговым двигателем:
#include <AFMotor.h>
AF_Stepper motor(200, 2);
void setup() {
motor.setSpeed(100); // 100 оборотов в минуту
}
void loop() {
motor.step(100, FORWARD, SINGLE);
delay(500);
motor.step(100, BACKWARD, DOUBLE);
delay(500);
}
Этот код будет вращать шаговый двигатель на 100 шагов вперед в режиме одиночного шага, затем на 100 шагов назад в режиме двойного шага. Такое управление позволяет реализовать точное позиционирование в различных механизмах.
Особенности работы с сервоприводами на L293D Motor Shield
Хотя основное назначение L293D Motor Shield — управление DC и шаговыми моторами, он также предоставляет возможность подключения сервоприводов. Особенности работы с сервоприводами:
- На плате есть два 3-пиновых разъема для подключения сервоприводов
- Питание сервоприводов осуществляется от 5V линии Arduino
- Для управления используется стандартная библиотека Servo.h
- Сервоприводы подключаются к пинам 9 и 10 Arduino
- Можно управлять положением сервопривода в диапазоне 0-180 градусов
Пример кода для управления сервоприводом:
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(9); // Подключаем сервопривод к пину 9
}
void loop() {
myservo.write(0); // Поворот в 0 градусов
delay(1000);
myservo.write(90); // Поворот в 90 градусов
delay(1000);
myservo.write(180); // Поворот в 180 градусов
delay(1000);
}
Этот код будет поворачивать сервопривод последовательно в положения 0, 90 и 180 градусов. Важно помнить, что при использовании мощных сервоприводов может потребоваться дополнительный источник питания, так как линия 5V Arduino может не обеспечить достаточный ток.
Советы по оптимизации работы с L293D Motor Shield
При работе с L293D Motor Shield следует учитывать некоторые особенности для обеспечения оптимальной и надежной работы:
- Используйте отдельный источник питания для моторов при работе с мощными двигателями
- Обеспечьте хорошее охлаждение микросхем L293D при длительной работе на высоких токах
- Используйте конденсаторы для сглаживания пульсаций напряжения питания моторов
- При работе с индуктивной нагрузкой (например, реле) используйте защитные диоды
- Не превышайте максимально допустимый ток через каналы L293D (600 мА постоянно, 1.2 А пиково)
Соблюдение этих рекомендаций поможет избежать перегрева, нестабильной работы и выхода из строя компонентов при реализации проектов с использованием L293D Motor Shield.
Статьи о роботах » Драйвер моторов четырехканальный на двух микросхемах L293D
Статья о четырехканальном драйвере моторов RKP-MDS-L293D на двух микросхемах L293D. Электрическая схема, функциональная диаграмма, подключение к Ардуино, подключение DC-моторов, примеры программного кода.
Подключение драйвера RKP-MDS-L293D Motor Shield L293D к Arduino UNO
Модуль управления моторами RKP-MDS-L293D на микросхемах L293D предназначен для управления различными типами двигателей — постоянного тока (до 4-х шт.), сервомоторов (до 2-х шт.) и шаговых двигателей (до 2-х шт.) совместно с Arduino.
Электрическая схема драйвера.
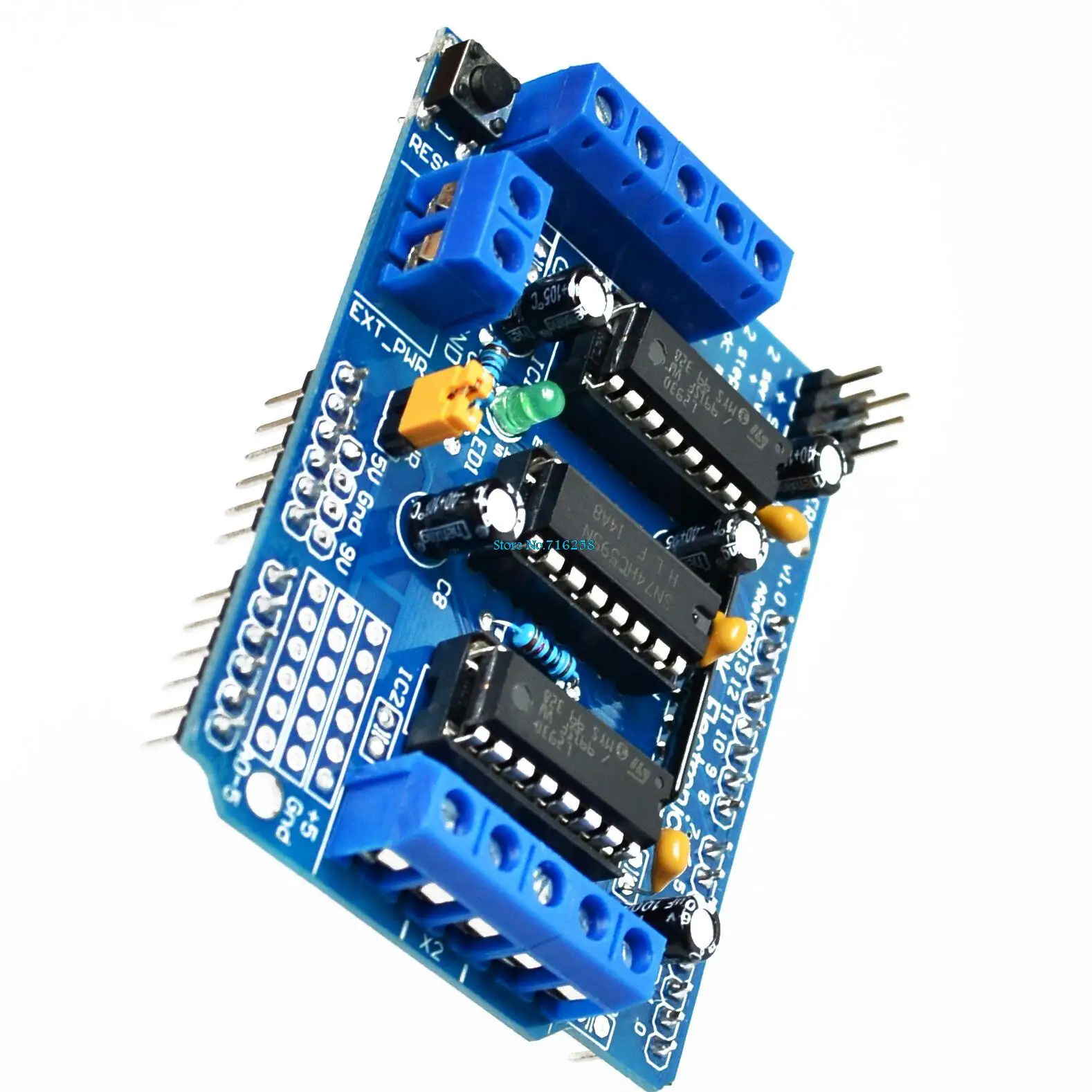
На электрической схеме драйвера RKP-MDS-L293D Motor Driver L293D видно, что режимы управление двигателями постоянного тока и шаговыми двигателями осуществляется через микросхему 74HCT595N (см. рис. 1).
Функциональная диаграмма микросхемы 74HCT595N
Рис. 1Это регистр последовательного сдвига с защелкой.
Скачать библиотеку AFMotor Motor shield =>>
В библиотеке AFMotor Motor shield определены pin для драйвера RKP-MDS-L293D по которым осуществляется установка режимов управление моторами:
// Arduino pin names for interface to 74HCT595 latch #define MOTORLATCH 12 = DIR_LATCH // pin 12 Arduino #define MOTORCLK 4 = DIR_CLK // pin 4 Arduino #define MOTORENABLE 7 = DIR_EN // pin 7 Arduino #define MOTORDATA 8 = DIR_SER // pin 8 Arduino
За изменение скорости вращения двигателей отвечаю цепи PWM0A, PWM0B, PWM1A, PWM1B, PWM2A и PWM2B микросхем драйверов двигателей L293D (см. рис. 2).
Рис. 2Соответствие pin драйвера моторов L293D и pin Arduino Uno приведены в таблице 1.
Таблица. 1А назначение управляющих битов регистра 74HCT595N для моторов 1- 4 в таблице 2.
Таблица. 2Из таблицы 2 видно, чтобы заставить Мотор 1 работать на max скорости нужно в регистр передать byte у которого bit 2 = 1 и bit 3 = 0, а чтобы поменять вращение на противоположное – bit 2 = 0 и bit 3 = 1.
Питание сервомоторов осуществляется от платы Arduino 5 Вольт. Если сервомоторы потребляют больший ток чем может выдать источник питания Arduino, то всё устройство начинает «глючить».
Это может случиться даже с небольшими серводвигателями, если их где-то заклинит. Тогда ток потребления может возрасти до 0,8-1А. Поэтому питать серводвигатели лучше от дополнительного источника питания.
Подключение питания
Питание моторов подключенных к драйверу RKP-MDS-L293D может осуществляется не сколькими способами:
1. От одного источника питания.
В этом случае питание подается на разъем Arduino 6-12В и с выхода линейного стабилизатора происходит питание цифровых схем Arduino и сервомоторов. Далее питание 6-12В через контакт Vin и установленный джампер, подается на драйвер RKP-MDS-L293D для питания остальных типов моторов.
2. От двух источников питания.
Для этого необходимо снять джампер источника питания.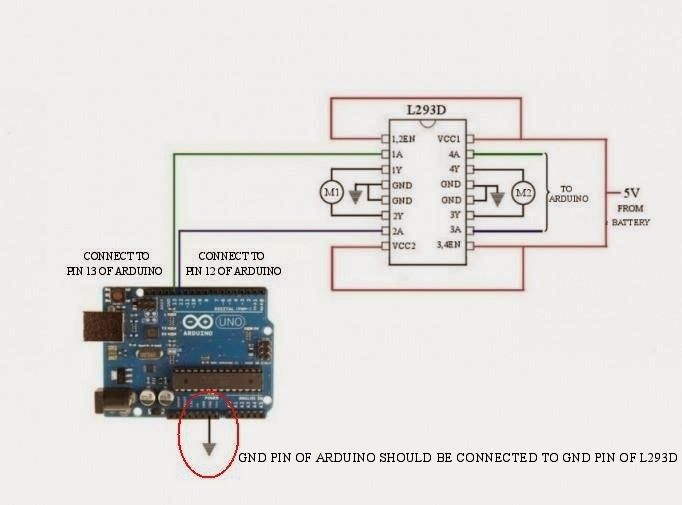
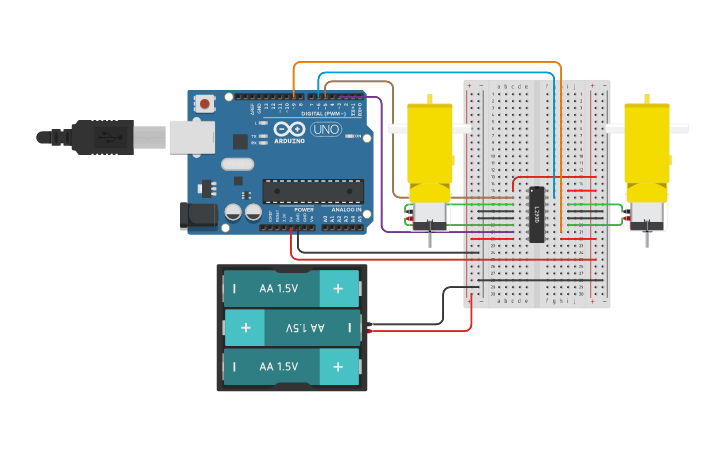
Схема подключения двигателей к драйверу RKP-MDS-L293D Motor Driver L293D
Подключение моторов постоянного тока (4 DC Motors)
Драйвер RKP-MDS-L293D позволяет одновременно подключить до 4-х двигателей постоянного тока (см. рис. 4).
Рис. 4
Подключение шаговых двигателей к драйверу RKP-MDS-L293D Motor Driver L293D
Драйвер Motor Shield L293D позволяет одновременно подключить до 2-х шаговых двигателей (см. рис. 5).
Рис. 5Плата расширения для двигателей L293D для Arduino — RadioMart.kz
> Двигатели>Драйверы двигателей>Плата расширения для двигателей L293D для Arduino
Артикул 10111
Данная плата позволит подключить одновременно к Arduino до четырех коллекторных DC двигателей, либо до двух биполярных шаговых двигателей. К тому же на плате имеются разъемы для подключения двух сервоприводов.
К тому же на плате имеются разъемы для подключения двух сервоприводов.
Подробнее
- Скачать коммерческое предложение
Подробнее
На борту данного шилда имеется две микросхемы L293D (1). L-ка позволяет управлять слаботочными двигателями с током потребления до 600 мА на канал. На двух пятипиновых клеммниках (2) можно насчитать 4 разъема для подключения двигателей (M1, M2, M3, M4),центральные выводы на пятипиновых клеммниках соединены с землей и служат для удобствапри подключении пятипроводных шаговый двигателей. Использование двух микросхем L293D позволяет одновременно подключить 4 моторчика постоянного тока либо 2 шаговых моторалибо два моторчика и шаговый. Для управления на прямую выводами L-ки (IN1, IN2, IN3, IN4),отвечающимими за выбор направления вращения, необходимо 4 вывода, а для двух микросхем целых 8. Для уменьшения количества управляющих выводов используется сдвиговый регистр74НС595 (3). Благодаря регистру управление сводится с 8-ми пинов к 4-ем.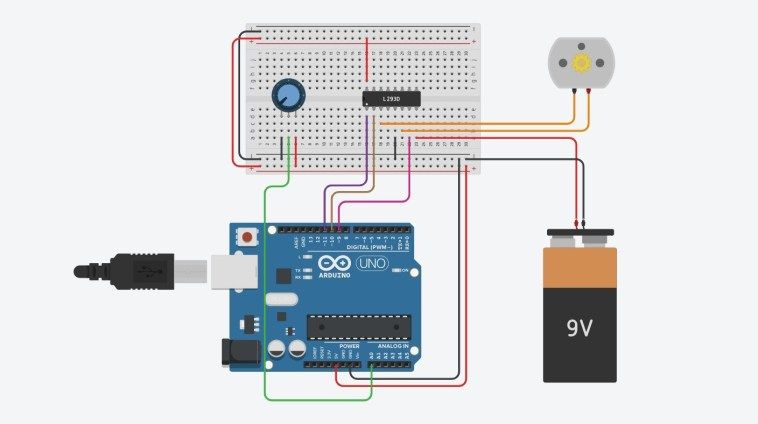 Также, на плату выведены 2 разъема для подключения сервоприводов (4). Управление сервоприводами стандартное с помощью библиотеки Servo.h Питание силовой части производится либо от внешнего клеммника (6) либо замыканием джампера (5) (питание от клеммника моторов +M соединяется с выводом Vin Arduino).
Также, на плату выведены 2 разъема для подключения сервоприводов (4). Управление сервоприводами стандартное с помощью библиотеки Servo.h Питание силовой части производится либо от внешнего клеммника (6) либо замыканием джампера (5) (питание от клеммника моторов +M соединяется с выводом Vin Arduino).
При замкнутом джампере напряжение для объединенного питания должно лежать в пределах от 6 до 12Вольт
К минусам данного шилда можно отнести то, что он задействует практически все цифровые пины:
Выводы, отвечающие за скорость вращения двигателей:
- Цифровой вывод 11- DC Мотор №1 / Шаговый №1.
- Цифровой вывод 3- DC Мотор №2 / Шаговый №1.
- Цифровой вывод 5- DC Мотор №3 / Шаговый №2.
- Цифровой вывод 6- DC Мотор №4 / Шаговый №2.
Выводы, отвечающие за выбор направления вращения двигателей:
- Цифровые выводы 4, 7, 8 и 12.

Выводы для управления сервоприводами (выведены на штырьки на краю платы):
- Цифровой вывод 9- Сервопривод №1
- Цифровой вывод 10- Сервопривод №2
В итоге незадействованными цифровыми выводами остаются только пины 2, 13 и пины интерфейса UART- 0, 1. Однако есть выход из данной ситуации. У нас остались незадействованные аналоговые входы A0-A6, их можно использовать как цифровые. В коде они будут записываться как цифровые с 14 по 19.
Комплект поставки и внешний вид данного товара могут отличаться от указанных на фотографиях в каталоге интернет-магазина.
Файлы для загрузки
Отзывы
Сопутствующие товары
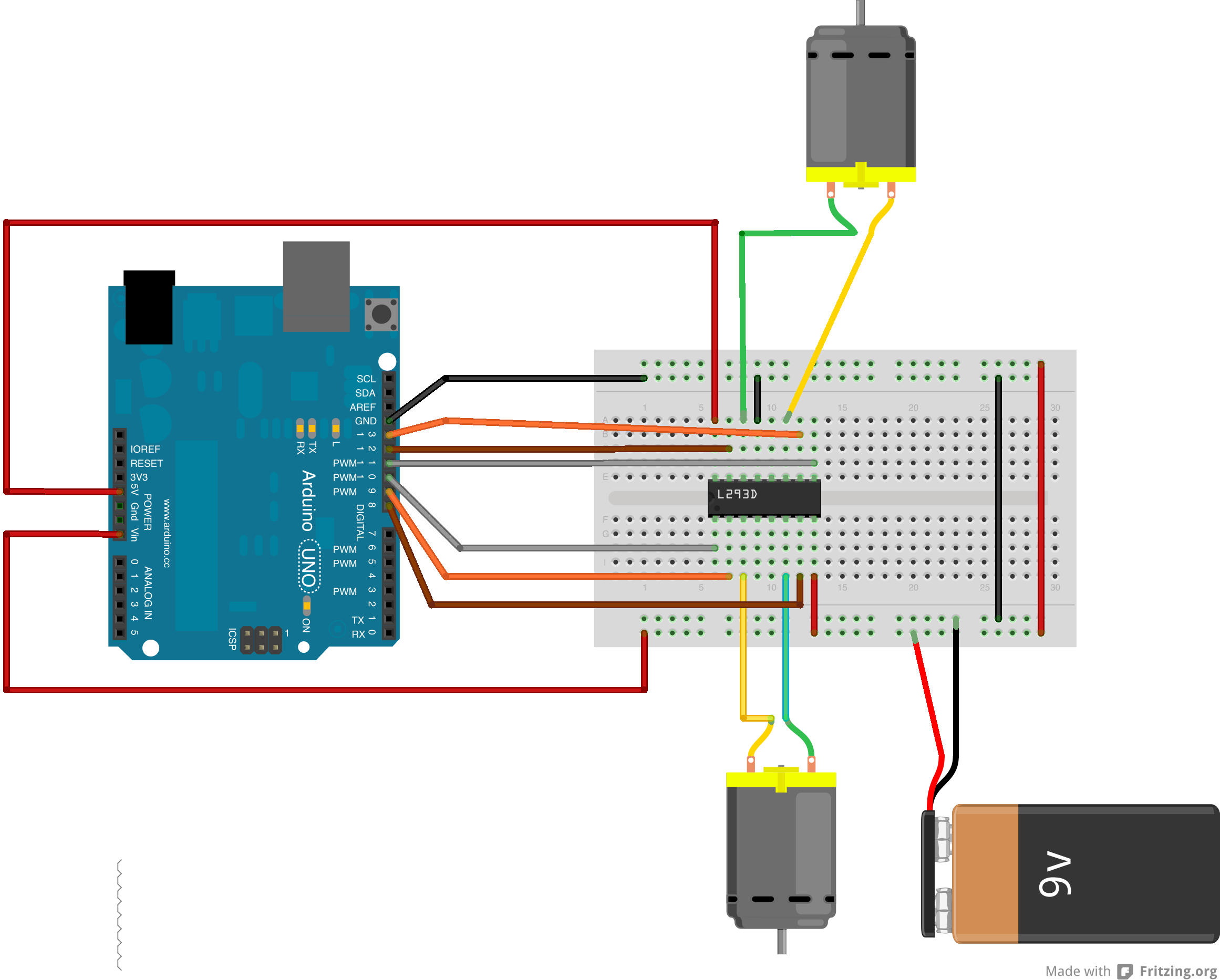
Управление двигателем постоянного тока с помощью платы драйвера двигателя L293D
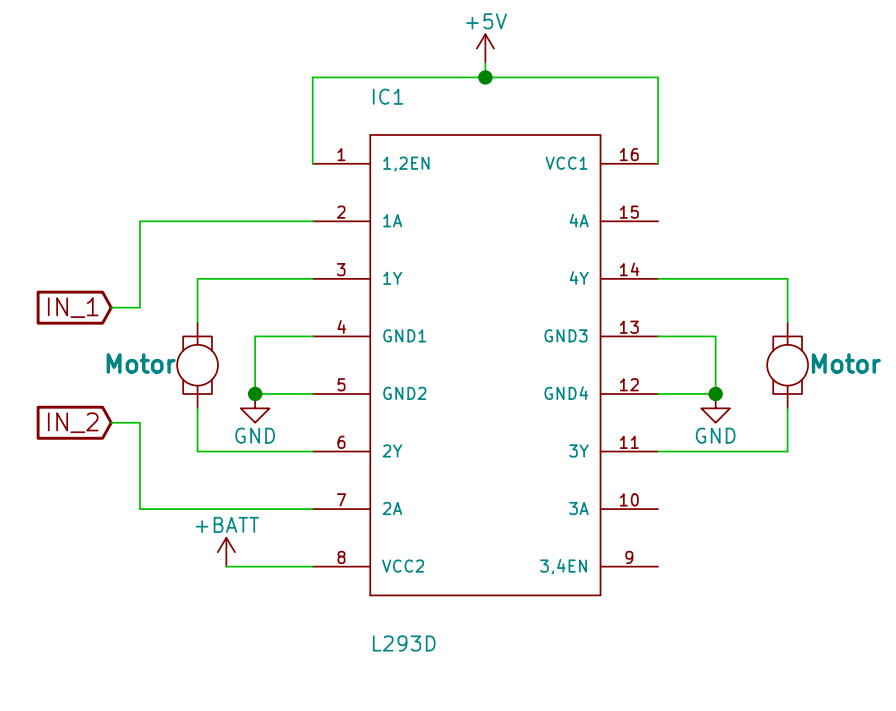
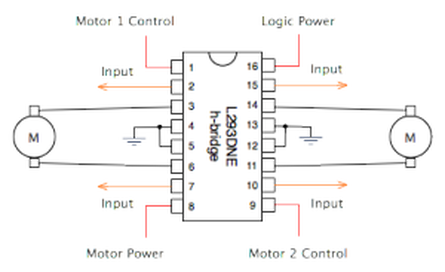
| Теория — Я использовал плату драйвера двигателя для управления двигателем постоянного тока, который использует логику L293D IC. Контакт 1 (Включить 1,2) — Этот контакт установлен в ВЫСОКИЙ уровень, чтобы включить выход на контактах 3 и 4, т.е. ВЫХОД 1 и ВЫХОД 2. +5 В должно быть подано на этот контакт для включения выходов . Контакт 2 (вход 1) – . Контакт GPIO от RaspberryPi должен быть подключен к этому контакту на микросхеме для управления направлением вращения двигателя постоянного тока. Контакт 3 (выход 1) — Для запуска этого контакта этот контакт следует подключить к одной из клемм двигателя постоянного тока. Контакт 4 (Земля) — Это 0 В микросхемы, которая подключена к GND Pi или -ve 9-вольтовой батареи. Контакт 5 (Земля) — . Этот контакт используется для той же цели, что и контакт 4. Контакт 6 (выход 2) — . Этот контакт должен быть подключен ко второй клемме того же двигателя, к которому подключен контакт 3. подключен. Контакт 7 (Вход 2) — К этому контакту следует подключить GPIO Pi для управления направлением вращения двигателя. Контакт 8 (Vcc 2) — Этот контакт обеспечивает питание двигателей постоянного тока. К этому контакту должен быть подключен положительный контакт 9-вольтовой батареи. Контакт 9 (Включить 3, 4) — Если на этом контакте установлен ВЫСОКИЙ уровень, активируются выходы 3 и 4, которые можно подключить ко второму двигателю постоянного тока. Контакт 10 (вход 3) — Этот контакт подключен к GPIO на Pi, чтобы обеспечить ввод для второго двигателя. Контакт 11 (выход 3) — . Этот контакт должен быть подключен к одной из клемм второго двигателя, чтобы управлять им. Контакт 12 (Земля) – . Этот контакт используется для тех же целей, что и контакты 4 и 5. Контакт 14 (выход 4) — Этот контакт подключен ко второй клемме двигателя, к которой подключен контакт 11. Контакт 15 (вход 4) — . Этот контакт должен быть подключен к GPIO на Pi для управления направлением второго двигателя. Контакт 16 (Vcc 1) — Этот контакт обеспечивает питание микросхемы. он может быть подключен к +5В Pi или +9В батареи. Motor rotation based on different inputs —
Требуется компоненты — 1. 2. Прыжковые провода 3. L293D Плата двигателя с IC 4. 9 -V Батарея 5. Двигатель DC 6. Доска Процедура. — Примечание — В этом проекте я использую нумерацию контактов GPIO на плате. 1. Подключите контакт 2 GPIO (+5 В) от RaspberryPi к красной горизонтальной направляющей в нижней части макетной платы. Вся эта шина теперь несет +5v. 2. Подключите контакт 6 GPIO (GND) от RaspberryPi к синей горизонтальной направляющей в нижней части макетной платы. Весь этот рельс теперь несет 0v. 3. Подсоедините красную горизонтальную шину (+5В) на макетной плате к контакту +ve на стороне платы L293D, отмеченной как +5В. Это устанавливает для Enable 1,2 и Enable 3, 4 значение HIGH. 4. Соедините синюю горизонтальную шину (0 В) на макетной плате с клеммой -ve на стороне платы L293D, отмеченной как +5 В. 5. Теперь подключите +ve, если 9-вольтовая батарея, к клемме +ve на стороне платы L293D, обозначенной как +12v. 6. Подключите -ve 9-вольтовой батареи к клемме -ve на стороне платы L293D, обозначенной как +12v. 7. Подключите контакт 13 GPIO от RaspberryPi к одному из двух контактов, помеченных как D0. 8. Подключите контакт 15 GPIO от RaspberryPi ко второму контакту, отмеченному как D0. 9. Подсоедините один из двух контактов, помеченных как M0, к одной из клемм двигателя постоянного тока. 10. Подсоедините второй контакт, помеченный как M0, ко второй клемме двигателя постоянного тока. Соединения см. на этой схеме 11. Включите RaspberryPi. 12. Загрузите и скопируйте сценарий motor_test.py на RaspberryPi из следующего репозитория GitHub: https://github.com/hamzatariqkhan/JamiaHamdard_rpi-basics 13. Чтобы запустить двигатель в противоположном направлении, измените строки 11 и 12. в сценарии — GPIO.output( 13, 1 ) gpio.output (15, 0) Посмотрите видео для этого проекта — |
 Плата обычно используется для одновременного управления двумя двигателями постоянного тока. Микросхема L293D имеет 16 контактов, которые используются для разных целей. Чтобы использовать плату драйвера двигателя L293D, вы должны сначала понять основы работы ИС. Вот краткое описание функциональности каждого вывода в IC —
Плата обычно используется для одновременного управления двумя двигателями постоянного тока. Микросхема L293D имеет 16 контактов, которые используются для разных целей. Чтобы использовать плату драйвера двигателя L293D, вы должны сначала понять основы работы ИС. Вот краткое описание функциональности каждого вывода в IC — 

 Raspberry Pi
Raspberry Pi  Это обеспечивает питание двигателей постоянного тока.
Это обеспечивает питание двигателей постоянного тока. L293D Модуль двигателя и IC Pinouts, Dataheet & Arduino Connection модуль драйвера двигателя и конфигурация контактов L293D IC, технические характеристики, работа и соединения Arduino.
Модуль драйвера мотора L293D
Почему в телефонах несколько камер?
Включите JavaScript
Почему в телефонах несколько камер?
L293D — это базовая интегрированная микросхема (ИС) драйвера двигателя, которая позволяет нам управлять двигателем постоянного тока в любом направлении, а также контролировать скорость двигателя. L293D — это 16-контактная микросхема, по 8 контактов на каждой стороне, что позволяет нам управлять двигателем. Это означает, что мы можем использовать один L293D для запуска до двух двигателей постоянного тока. L293D состоит из двух мостовых Н-образных схем. Н-мост — простейшая схема смены полярности подключенной к нему нагрузки.
Имеется 2 контакта OUTPUT, 2 контакта INPUT и 1 контакт ENABLE для управления каждым двигателем. Он предназначен для управления индуктивными нагрузками, такими как соленоиды, реле, двигатели постоянного тока и биполярные шаговые двигатели, а также другими сильноточными/высоковольтными нагрузками.
Модуль привода двигателя L293D
Выводы модуля привода двигателя L293D
Выводы модуля привода двигателя L293DНа приведенном выше рисунке показаны выводы модуля привода двигателя L293D. Функция каждого контакта и порта также указана на рисунке.
IN1, IN2 и IN3, IN4 — это входные контакты, используемые для подачи управляющего сигнала от контроллера для запуска двигателя в разных направлениях.
EN1 и EN2 — контакты включения.
Мощность двигателя. Если используется редукторный двигатель на 12 В постоянного тока, подайте 12 В. |
 Подключите 5 В постоянного тока к контактам EN1 и EN2, чтобы двигатель работал на нормальной скорости
Подключите 5 В постоянного тока к контактам EN1 и EN2, чтобы двигатель работал на нормальной скорости
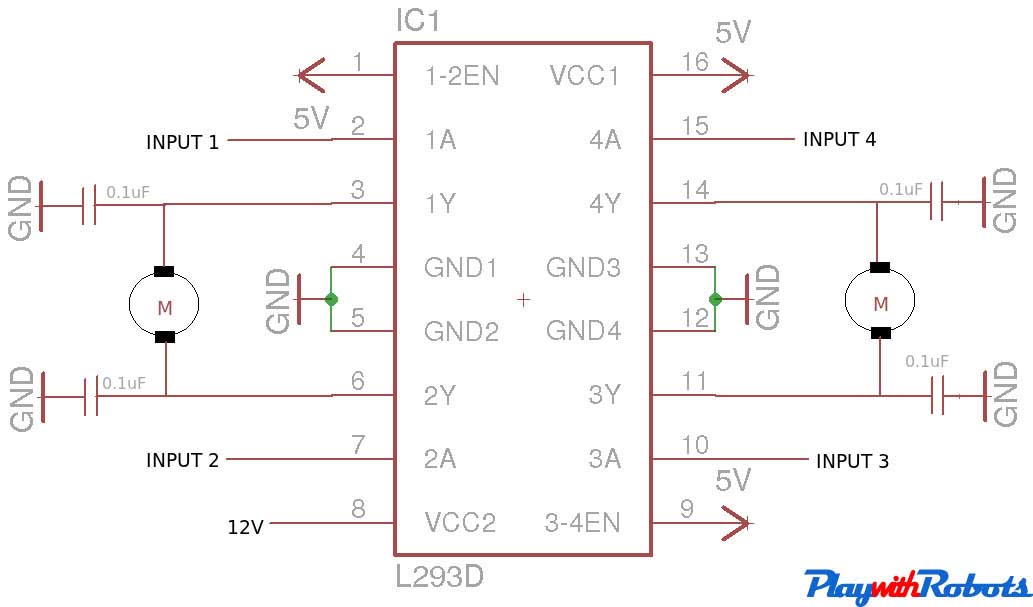
Выводы микросхемы драйвера двигателя L293D
Выводы микросхемы L293D
| Номер контакта | Имя | Функция |
| 1 | Включить 1-2 | Когда на этот вывод подается ВЫСОКИЙ уровень или Логическая 1, левая сторона микросхемы работает, а когда он низкий, левая сторона не работает. |
| 2 | ВХОД 1 | Когда на этот вывод подается ВЫСОКИЙ уровень или логическая 1, выход 1 становится ВЫСОКИМ. |
| 3 | ВЫХОД 1 | Этот контакт подключен к одной из клемм двигателя 1. |
| 4,5 | ЗЕМЛЯ | Должен быть подключен к заземлению цепи. |
| 6 | ВЫХОД 2 | Этот контакт подключен к одной из клемм двигателя 1. |
| 7 | ВХОД 2 | Когда на этот вывод подается ВЫСОКИЙ уровень или Логическая 1, выход 2 становится ВЫСОКИМ. |
| 8 | ВКК2 | Это напряжение, необходимое для работы двигателя. Оно может быть больше, чем напряжение IC (VCC1). |
| 16 | ВКК1 | Обеспечивает питание микросхемы l293D. Значит, на этот пин нужно подать 5 В. |
| 15 | ВХОД 4 | Когда на этот контакт подается ВЫСОКИЙ уровень или логическая 1, выход 4 становится ВЫСОКИМ. |
| 14 | ВЫХОД 4 | Этот контакт подключен к одной из клемм двигателя 2.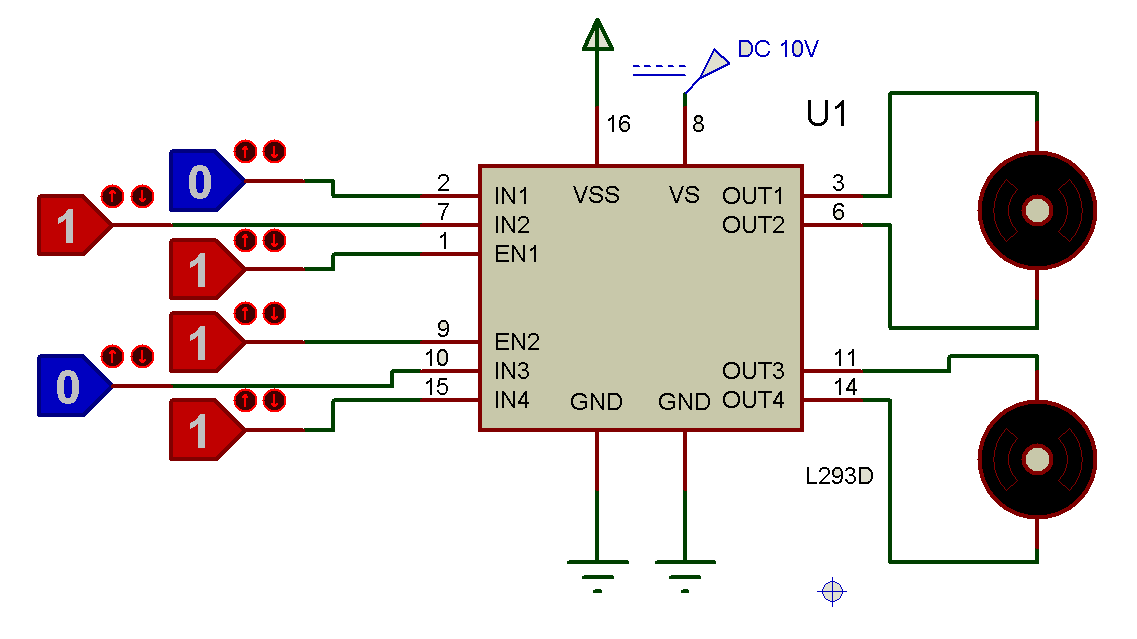 |
| 13,12 | ЗЕМЛЯ | Должен быть подключен к заземлению цепи. |
| 11 | ВЫХОД 3 | Этот контакт подключен к одной из клемм двигателя 2. |
| 10 | ВХОД 3 | Когда на этот контакт подается ВЫСОКИЙ уровень или логическая 1, выход 3 становится ВЫСОКИМ. |
| 9 | Включить 3-4 | Когда на этот вывод подается ВЫСОКИЙ уровень или Логическая 1, правая часть микросхемы работает, а когда он низкий, правая сторона не работает. |
Примечание: В микросхеме L293D всего 4 контакта заземления, поскольку она должна работать с большими токами. Итак, нам нужен радиатор, чтобы уменьшить нагрев и защитить микросхему от повреждений. Когда мы припаиваем эти контакты к печатной плате, мы получаем большую металлическую область между основаниями, где может выделяться тепло.
L293D ИС драйвера двигателя Лист данных:
Нажмите на эту ссылку, чтобы просмотреть весь ТЕХНИЧЕСКИЙ СПЕЦИФИКАЦИЯ
Вы можете найти подробную информацию о L293D IC в таблице данных, приведенной выше.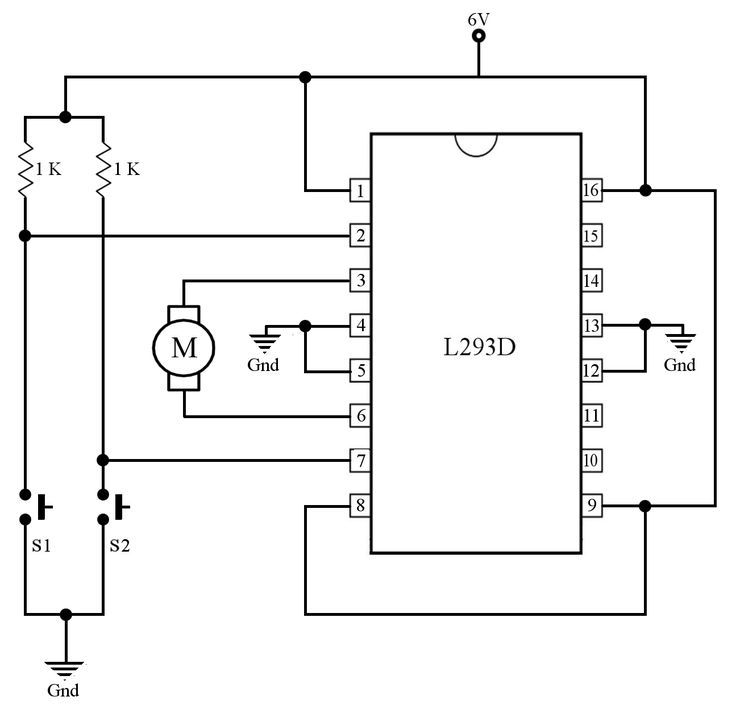 Спецификации и информацию, такую как абсолютные максимальные номиналы, блок-схему и рекомендуемые схемы, можно найти в техническом описании.
Спецификации и информацию, такую как абсолютные максимальные номиналы, блок-схему и рекомендуемые схемы, можно найти в техническом описании.
Технические характеристики интегральной схемы драйвера двигателя L293D:
- Широкий диапазон напряжения питания: от 4,5 В до 36 В
- Отдельный источник питания входной логики
- Внутренняя защита от электростатического разряда
- Входы с высокой помехоустойчивостью
- Выходной ток 600 мА на канал
- Пиковый выходной ток 1,2 А на канал
- Выходные фиксирующие диоды для подавления индуктивных переходных процессов
- Рабочая температура от 0°C до 70°C.
- Доступно автоматическое отключение при перегреве
Работа микросхемы драйвера двигателя L293D
В L293d имеется 4 входных контакта для управления направлением. Контакты 2,7 (1A и 2A) с левой стороны и контакты 15,10 (3A и 4A) с правой стороны микросхемы. Входные контакты с левой стороны регулируют вращение двигателя, подключенного к левому концу, а входные контакты с правой стороны регулируют двигатель с правой стороны. Двигатели вращаются в зависимости от входных сигналов, подаваемых на входные контакты в виде сигналов ВЫСОКОГО или НИЗКОГО уровня.
Входные контакты с левой стороны регулируют вращение двигателя, подключенного к левому концу, а входные контакты с правой стороны регулируют двигатель с правой стороны. Двигатели вращаются в зависимости от входных сигналов, подаваемых на входные контакты в виде сигналов ВЫСОКОГО или НИЗКОГО уровня.
Возьмем пример, двигатель подключен к выходным контактам левой стороны (контакты 3,6). Чтобы управлять этим двигателем, мы должны обеспечить входную логику на контакт 2,7 (1A, 2A).
Пример схемы для работы L293D IC
- Контакт 2 = ВЫСОКИЙ и контакт 7 = НИЗКИЙ | По часовой стрелке
- Контакт 2 = НИЗКИЙ и контакт 7 = ВЫСОКИЙ | Против часовой стрелки Направление
- Контакт 2 = НИЗКИЙ и контакт 7 = НИЗКИЙ | Холостой ход (без вращения)
- Контакт 2 = ВЫСОКИЙ и контакт 7 = ВЫСОКИЙ | Холостой ход (без вращения)
Аналогичным образом мы можем управлять двигателем с правой стороны, подключенным к контакту (11,14). Для этого нам нужно обеспечить входной сигнал ВЫСОКИЙ и НИЗКИЙ через контакты (10,15).