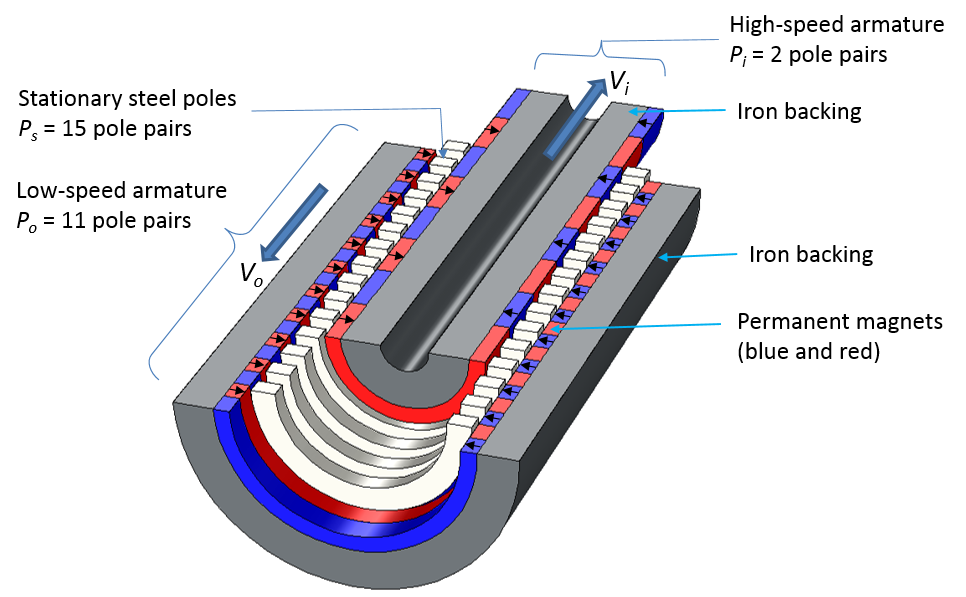
Как устроен линейный асинхронный двигатель. Каков принцип его работы. Где применяются линейные асинхронные двигатели. Каковы их преимущества и недостатки.
Что такое линейный асинхронный двигатель
Линейный асинхронный двигатель (ЛАД) — это электрическая машина, преобразующая электрическую энергию в механическое линейное перемещение. В отличие от обычных асинхронных двигателей, создающих вращательное движение, ЛАД обеспечивает прямолинейное перемещение подвижной части.
Основные части линейного асинхронного двигателя:
- Первичная часть (индуктор) — неподвижная часть с обмотками, создающими бегущее магнитное поле
- Вторичная часть (якорь) — подвижная часть, взаимодействующая с магнитным полем индуктора
При подаче трехфазного переменного тока на обмотки индуктора создается бегущее магнитное поле. Оно индуцирует токи во вторичной части, которые взаимодействуют с полем индуктора, создавая тяговое усилие.
Принцип работы линейного асинхронного двигателя
Принцип действия ЛАД основан на взаимодействии бегущего магнитного поля индуктора с токами, наведенными в проводящей вторичной части. Рассмотрим основные этапы работы:
- На обмотки индуктора подается трехфазный переменный ток
- Возникает бегущее магнитное поле, перемещающееся вдоль индуктора
- Магнитное поле пересекает проводники вторичной части и индуцирует в них токи
- Взаимодействие индуцированных токов с магнитным полем создает тяговое усилие
- Под действием силы вторичная часть начинает движение
Скорость движения вторичной части всегда меньше скорости бегущего магнитного поля. Разность этих скоростей называется скольжением.
Устройство линейного асинхронного двигателя
Конструктивно линейный асинхронный двигатель состоит из следующих основных элементов:
- Магнитопровод индуктора — набор стальных пластин с пазами для укладки обмоток
- Обмотка индуктора — медные или алюминиевые проводники, уложенные в пазы
- Вторичный элемент — металлическая полоса или пластина (сплошная или шихтованная)
- Система охлаждения — для отвода тепла от обмоток
- Каркас и крепежные элементы
Существуют различные конструктивные исполнения ЛАД:
- Односторонние — индуктор расположен с одной стороны от вторичного элемента
- Двусторонние — два индуктора по обе стороны от вторичного элемента
- Цилиндрические — индуктор выполнен в виде цилиндра
Преимущества линейных асинхронных двигателей
Линейные асинхронные двигатели обладают рядом важных достоинств:
- Простота конструкции и надежность
- Отсутствие механических передач для преобразования вращения в линейное движение
- Высокие скорости перемещения (до 100 м/с и более)
- Плавность хода и точность позиционирования
- Возможность работы в агрессивных средах
- Бесконтактная передача усилия
- Высокий КПД и коэффициент мощности
Эти преимущества обуславливают широкое применение ЛАД в различных отраслях.
Недостатки линейных асинхронных двигателей
Несмотря на множество достоинств, ЛАД имеют и некоторые недостатки:
- Сложность изготовления индуктора большой длины
- Повышенные потери в стали из-за краевых эффектов
- Низкий коэффициент мощности при большом воздушном зазоре
- Сложность обеспечения равномерного воздушного зазора
- Повышенное магнитное рассеяние
- Необходимость экранирования магнитного поля
Однако современные технологии позволяют в значительной степени компенсировать эти недостатки.
Области применения линейных асинхронных двигателей
Благодаря своим уникальным свойствам, ЛАД нашли широкое применение в различных отраслях:

- Высокоскоростной наземный транспорт (поезда на магнитной подушке)
- Подъемно-транспортные механизмы (конвейеры, подъемники)
- Металлургическое оборудование (прокатные станы, дозаторы металла)
- Станкостроение (приводы подач станков с ЧПУ)
- Робототехника и автоматизация производства
- Аттракционы и тренажеры
- Космическая техника (системы запуска космических аппаратов)
Сфера применения ЛАД постоянно расширяется по мере совершенствования их конструкции и характеристик.
Перспективы развития линейных асинхронных двигателей
Основные направления совершенствования ЛАД:
- Повышение удельной мощности и КПД
- Улучшение массогабаритных показателей
- Снижение потерь и повышение коэффициента мощности
- Разработка новых магнитных материалов
- Совершенствование систем управления
- Интеграция с другими типами линейных двигателей
Развитие технологий производства и новых материалов открывает широкие перспективы для создания более эффективных линейных асинхронных двигателей.
цилиндрический линейный двигатель / Хабр
Источник картинки
Мы привыкли к тому, что в различных механических устройствах, требующих для своей работы электродвигатель, преобразование вращательного движения в необходимое рабочее — происходит с использованием множества промежуточных частей, что усложняет конструкцию, и уменьшает надёжность. Однако существует альтернатива и именно об этом мы и поговорим в этой статье.
Научно-технический прогресс, охватывающий одну сферу человеческой жизни за другой, постепенно видоизменял и способ передачи движения от электродвигателя. Если на станках начала прошлого века электродвигатель был один на всех и движение от него передавалась по валу через весь цех, с которого отдельные станки забирали необходимый вращательный момент с помощью ремённой передачи, —
то с ускорением прогресса, двигатель сначала переместился как можно ближе к конкретному станку, а потом и вовсе перешёл на каждый станок.
Претерпевали изменения и передаточные звенья от двигателя к станку. Например, широко распространились шарико-винтовые пары.
Источник: 3d-diy.ru
Причём шарико-винтовые пары только относительно недавно стали широкодоступными, их технология производства была достаточно отработана, а стоимость стала доступной для широкого круга потребителей. В свою очередь, разнообразные зубчатые передачи всегда были относительно доступными и широко применялись в различных схемах передачи движения. У зубчатых передач всегда была одна отрицательная сторона — довольно большой шум в работе и физический износ при трении зубьев друг о друга. Конечно, это можно несколько нивелировать тщательной смазкой, однако она притягивает к себе пыль, соринки, загрязняет рабочий редуктор (особенно если этот редуктор установлен на металлообрабатывающем станке).
Поэтому инженерная мысль искала какие-то другие решения, которые бы позволили избавиться от промежуточных звеньев. И такое решение было найдено — линейный электродвигатель!
Линейный двигатель — это электродвигатель, у которого статор и ротор «развёрнуты», таким образом, что вместо создания крутящего момента (вращения) — он создаёт линейную силу по всей своей длине.
Автор: Schnibbi678 — Own work, CC BY-SA 3.0, Источник
Однако линейные двигатели не обязательно прямые:
Автор: Lutex (talk) — собственная работа, CC BY-SA 3.0, Источник
Характерно, что активная часть линейного двигателя имеет концы, в то время как более традиционные двигатели устроены в виде непрерывного контура.
Было предложено множество конструкций линейных двигателей, которые можно разделить на две основные категории:
- линейные двигатели с малым ускорением;
- линейные двигатели с высоким ускорением.

Линейные двигатели с высоким ускорением обычно довольно короткие и предназначены для ускорения объекта до очень высокой скорости, например, рельсотрон:
Линейные двигатели с высоким ускорением предлагались для ряда применений. Их рассматривали для использования в качестве оружия, поскольку современные бронебойные боеприпасы, как правило, состоят из небольших снарядов с очень высокой кинетической энергией, для которых подходят именно такие двигатели. Многие американские горки, запущенные в парках развлечений, теперь используют линейные асинхронные двигатели для движения поезда на высокой скорости.
Обычно они имеют конструкцию линейного асинхронного двигателя переменного тока (LIM) с активной трёхфазной обмоткой на одной стороне воздушного зазора и пластиной пассивного проводника на другой стороне. Тем не менее рельсотрон постоянного тока с униполярным линейным двигателем является ещё одной конструкцией линейного двигателя с высоким ускорением.
Высокоскоростные линейные двигатели сложно проектировать по ряду причин. Они требуют большого количества энергии в очень короткие промежутки времени. Одна конструкция ракетной установки требует 300 ГДж для каждого запуска в период менее секунды.
Обычные электрические генераторы не предназначены для такой нагрузки, но можно использовать методы краткосрочного накопления электроэнергии. Конденсаторы громоздки и дороги, но могут быстро поставить большое количество энергии. Униполярные генераторы можно использовать очень быстрого преобразования кинетической энергии маховика в электрическую энергию.
Линейные двигатели с высоким ускорением также требуют очень сильных магнитных полей и магнитные поля часто слишком сильны, чтобы можно было использовать сверхпроводники. Однако при тщательном проектировании это не должно быть серьёзной проблемой.
В данный момент применение линейных электродвигателей ещё не до конца отработано и поэтому их технологии изготовления, и стоимость оставляет желать лучшего. Однако, использование линейного двигателя позволяет реализовать такие заманчивые опции, как движение с высочайшей скоростью ( до 1,8 м/с и более!), практически без механического износа:
Однако, использование линейного двигателя позволяет реализовать такие заманчивые опции, как движение с высочайшей скоростью ( до 1,8 м/с и более!), практически без механического износа:
Однако не все двигатели так хороши, например, плоские линейные двигатели (схема которого приведена несколько выше).
Кроме сложности изготовления, они отличаются повышенным нагревом, причиной чего являются вихревые токи Фуко, что ещё усугубляется ограниченными возможностями по охлаждению двигателя, потому что, как правило, на них сверху смонтирован рабочий стол обрабатывающего станка. Так как многие промышленные станки, особенно металлообрабатывающие, имеют повышенные требования к жёсткости и точности конструкции (для обеспечения требуемой точности обработки), — такие двигатели вносят искажения в работу из-за температурного расширения конструкции благодаря нагреву в процессе, причём нагрев может достигать даже 100 градусов Цельсия!
Альтернативой плоскими линейным двигателям являются цилиндрические линейные двигатели. Они устроены следующим образом: цилиндрическая обмотка расположена вокруг сердечника, образованного из магнитов. То есть, катушка может перемещаться по этому сердечнику.
Они устроены следующим образом: цилиндрическая обмотка расположена вокруг сердечника, образованного из магнитов. То есть, катушка может перемещаться по этому сердечнику.
В отличие от плоского двигателя линейный двигатель достаточно эффективно охлаждается и поэтому не требует сложных и проблемных конструкций для охлаждения, а так как у него отсутствует сердечник, — отсутствует и потенциальный источник тепла под воздействием вихревых токов.
Благодаря отсутствию сердечника в конструкции цилиндрического двигателя,— он может работать очень плавно, без скачков скорости:
Другими словами, на основе линейных электрических двигателей возможно построение ультрапрецизионного оборудования.
Кроме того, из-за симметричной конструкции происходит более эффективное использование магнитного потока, что позволяет добиться большей эффективности, за счёт использования в 2 раза меньшего количества редкоземельных магнитов.
Как было уже сказано выше, износ двигателя такого типа при работе весьма несущественный, так как непосредственный физический контакт катушки и цилиндра-оси при работе практически отсутствует.
Принцип, на котором базируется работа линейных двигателей, заключается в проявлении силы, которая воздействует на проводник с током в магнитном поле, то есть на законе Ампера (исходя из которого можно сказать, что максимальное усилие, которое может развить двигатель – является произведением силы тока в обмотках на векторное произведение магнитной индукции поля на вектор длины провода в обмотках).
Источник: www.abamet.ru
Другими словами, можно сказать, что у обычного линейного двигателя примерно от 30 до 80% длины обмоток служит для протекания тока под прямым углом к вектору индукции поля, а оставшаяся часть обмоток, по сути, только тормозит движение. Но это касается только плоского двигателя! В отличие от него, устройство цилиндрического линейного двигателя позволяет практически на всей длине обмоток протекать току под оптимальным углом в 90 градусов.
Для тех, кто хочет попробовать собрать подобный двигатель для собственных нужд, — я прикладываю ниже ссылку на диссертацию «Конструкция и сборка прецизионного линейного двигателя и контроллера» (Design and Construction of a Precision Tubular Linear Motor and Controller, — Bryan Craig Murphy), где достаточно подробно разобрана теоретическая база такого двигателя: Ссылка на диссертацию.
Согласно пункту 1.4 этой диссертации «Предлагаемая конструкция» (Proposed Design), автор рассматривает устройство, в котором движется шток, а блок катушек остаётся неподвижным (хотя это не суть, вы понимаете, что при желании можно двигать или то или то, или «всё сразу и много» © 🙂 ): устройство состоит из массива магнитов внутри массива электромагнитных катушек.
Катушки разделены на три фазы: A, B и C. В каждой фазе по три катушки; центральная катушка каждой фазы обращена в направлении, противоположном двум внешним. Таким образом, когда ток проходит через фазу катушек, центральная катушка будет генерировать магнитное поле равное по величине каждой из других катушек в этой фазе, но в противоположном направлении.
Источник картинки: Диссертация «Design and Construction of a Precision Tubular Linear Motor and Controller, — Bryan Craig Murphy»
Как показано на рисунке выше, в двигателе используются цилиндрические постоянные магниты. Пары магнитов ориентированы в том же направлении и расположены напротив соседних пар магнитов. Алюминиевая прокладка помещается между парами противоположных магнитов для облегчения конструкции. Когда ток течёт по трём фазам катушек, катушки генерируют силы на постоянные магниты в соответствии с уравнением силы Лоренца.
Алюминиевая прокладка помещается между парами противоположных магнитов для облегчения конструкции. Когда ток течёт по трём фазам катушек, катушки генерируют силы на постоянные магниты в соответствии с уравнением силы Лоренца.
Самодельная конструкция, похожая на описанную (только всё наоборот — движется блок катушек) показана тут:
В своём нынешнем состоянии двигатель имеет время нарастания 55 мс, время установления 600 мс и перерегулирование 65 % при вводе с шагом в 1 см. Мотор способен выдержать максимальную осевую нагрузку в 26,4 Н. Эта максимальная сила значительно меньше, чем у коммерческих двигателей сопоставимого размера, однако эта конструкция позволяет более плавное позиционирование без эффекта «зубчатого колеса».
Работа заводского аппарата, примерно аналогичной конструкции, как в этой диссертации — показана на видео ниже:
Подытоживая, можно сказать, что широкое использование линейных двигателей только начинает свою жизнь, и каждый может попробовать собрать свою конструкцию. Тем более что благодаря своей простоте, — такой двигатель собирают даже энтузиасты. Для высокоточного движения в конструкции можно использовать датчики положения.
Тем более что благодаря своей простоте, — такой двигатель собирают даже энтузиасты. Для высокоточного движения в конструкции можно использовать датчики положения.
Как часть сервомеханизма, цилиндрические линейные двигатели могут обеспечить одновременное сочетание высокой тяги, высокой скорости и высокой точности, — далеко за пределами возможностей большинства других типов приводов.
Например, такие двигатели с некоторого времени стали устанавливать на 3d принтеры:
Теоретически, на цилиндрических линейных двигателях можно реализовать FDM 3d принтер, работающий на поразительных скоростях, очень точный, без вносимых стандартным передаточным трактом (зубчатые ремни, ШВП, винт/гайка и т.д) ошибок, если соответствующим образом позаботиться о высокопроизводительном экструдере и экстремально хорошем охлаждении — например, с применением охлаждающего потока воздуха в -50°C (используя трубку Ранка-Хилша).
Цилиндрические линейные двигатели на постоянных магнитах не следует путать с цилиндрическими линейными асинхронными двигателями, которые работают по другому принципу.
Линейный двигатель | это… Что такое Линейный двигатель?
Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит.
Поезда Московской монорельсовой транспортной системы используют для движения асинхронный линейный двигатель. Статор расположен на подвижном составе, а вторичным элементом служит монорельс.
Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) линейных электродвигателей, например, линейные асинхронные электродвигатели (ЛАД), линейные синхронные электродвигатели, линейные электромагнитные двигатели, линейные магнитоэлектрические двигатели, линейные магнитострикционные двигатели, линейные пьезоэлектрические (электрострикционные) двигатели и др.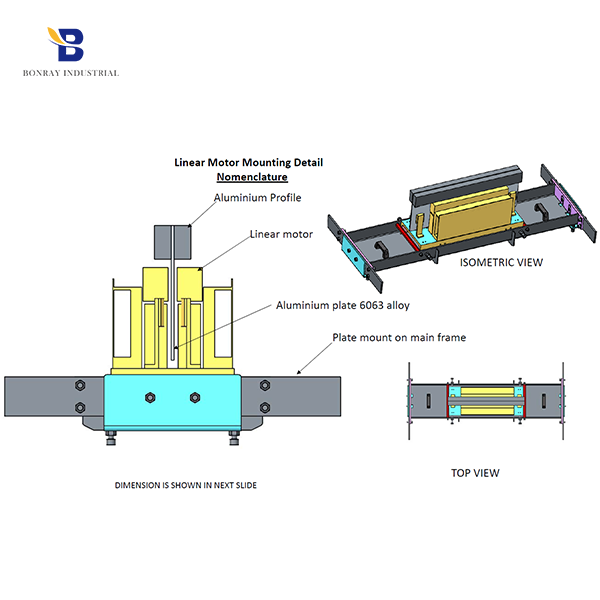 Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающая энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, т.к. слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет). Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающая энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, т.к. слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет). Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
|
Содержание
|
Асинхронный линейный двигатель
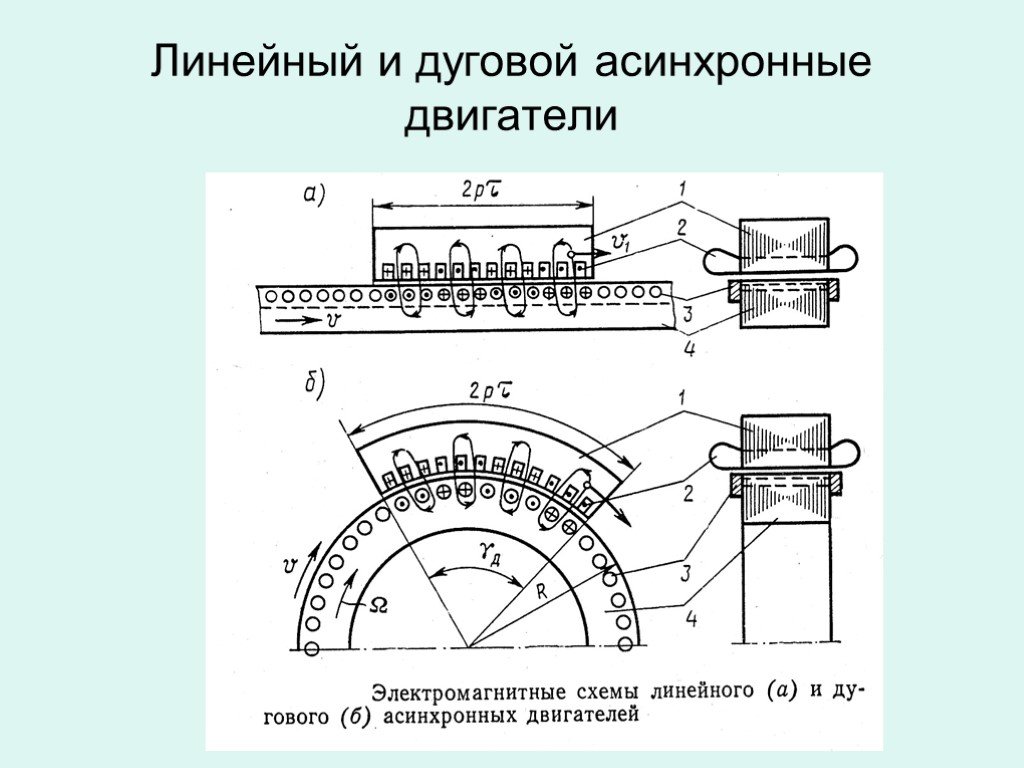
Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки статора такого двигателя подключить к сети трехфазного переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2tf. Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V — v)/V, где v — скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%. [1] Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы.
Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V — v)/V, где v — скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%. [1] Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы. Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока. Линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы. Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода.
Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока. Линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы. Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Синхронный линейный двигатель
Схема синхронного линейного двигателя.
Основной областью применения синхронных двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице, и высоким КПД, достигающем 96%. Применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице, и высоким КПД, достигающем 96%. Применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Применение линейных двигателей
- Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей: прямолинейность движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств, простота конструкции, отсутствие трущихся частей (энергия магнитного поля непосредственно преобразуется в механическую), что позволяет добиться высокой надежности и КПД.
 Еще одно преимущество связано с независимостью силы тяги от силы сцепления колес с рельсовым путем, что недостижимо для обычных систем электрической тяги. При использовании линейных двигателей исключается буксование колес электрического транспорта (именно этой причиной был обусловлен выбор линейного двигателя для ММТС), а ускорения и скорости движения средств транспорта могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, и динамической устойчивостью ходовой части транспорта и пути.
Еще одно преимущество связано с независимостью силы тяги от силы сцепления колес с рельсовым путем, что недостижимо для обычных систем электрической тяги. При использовании линейных двигателей исключается буксование колес электрического транспорта (именно этой причиной был обусловлен выбор линейного двигателя для ММТС), а ускорения и скорости движения средств транспорта могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, и динамической устойчивостью ходовой части транспорта и пути.
- Линейные асинхронные двигатели применяются для привода механизмов транспортировки грузов различных изделий. Такой конвейер имеет металлическую ленту, которая проходит внутри статоров линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
- Линейный двигатель может применяться для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Статор линейного двигателя располагается на стреле молота и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки. Ударная часть молота является одновременно вторичным элементом двигателя. Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.

- Разновидностью линейного двигателя можно считать магнитогидродинамический насос. Такие насосы применяются для перекачки электропроводящих жидкостей и в том числе жидких металлов, и широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя. Магнитогидродинамические насосы могут быть постоянного или переменного тока. Для насоса постоянного тока первичным элементом — статором двигателя постоянного тока — является С-образный электромагнит. В воздушный зазор электромагнита помещается трубопровод с жидким металлом. С помощью электродов, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле.
 Под действием этой силы металл начнет перемещаться по трубопроводу. Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла. [2]
Под действием этой силы металл начнет перемещаться по трубопроводу. Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла. [2]
Линейные двигатели высокого и низкого ускорения
Все линейные двигатели их можно разделить на две категории:
- двигатели низкого ускорения
- двигатели высокого ускорения
Двигатели низкого ускорения используются в общественном транспорте (маглев, монорельс, метрополитен) как тяговые, а также в станках (лазерных, водорезных, сверлильно-фрезерных) и другом технологическом оборудовании в промышленности. Двигатели высокого ускорения весьма небольшие по длине, и обычно применяются, чтобы разогнать объект до высокой скорости, а затем выпустить его (см. пушка Гаусса). Они часто используются для исследований гиперскоростных столкновений, а также в специальных устройствах, таких, как оружие[источник не указан 308 дней] или пусковые установки космических кораблей[каких?].
Линейные двигатели широко используются также в приводах подачи металлорежущих станков и в робототехнике. Для повышения точности позиционирования часто используются линейные датчики положения.
Источники
- ↑ Линейные асинхронные двигатели — Принцип действия
- ↑ Линейные электродвигатели
Ссылки
- Построение модели линейного асинхронного двигателя с помощью программы «ELCUT» и «FEMLAB»
- Современное программное обеспечение для моделирования линейных асинхронных двигателей
- Создание уточненной математической модели линейного асинхронного электродвигателя
- Конструкции электрических машин
Линейный асинхронный двигатель: как это работает
Что за шумиха вокруг Hyperloop? Как он движется? Какая технология делает это возможным? Ответ: линейные асинхронные двигатели.
Как работает линейный асинхронный двигатель?
Теорию линейного асинхронного двигателя (ЛИД) проще всего понять как роторный двигатель, который был разрезан и развернут для создания линейного движения вместо вращательного. Он состоит из двух частей, первичной и вторичной, которые взаимодействуют друг с другом только при подаче питания. Либо первичный, либо вторичный могут быть зафиксированы, пока другой перемещается.
Он состоит из двух частей, первичной и вторичной, которые взаимодействуют друг с другом только при подаче питания. Либо первичный, либо вторичный могут быть зафиксированы, пока другой перемещается.
При подаче трехфазного переменного тока на первичную обмотку индуцируется бегущая волна электромагнитного потока, которая перемещается относительно первичной обмотки. Волна индуцирует электрический ток в проводящей реакционной пластине. Индуцированный электрический ток взаимодействует с магнитным потоком, создавая линейную силу. Скорость двигателя можно изменять, изменяя входную частоту с помощью преобразователя частоты.
Первичная обмотка состоит из трехфазной катушки, эквивалентной статору роторного двигателя. Трехфазные катушки наматываются и вставляются в стопку стальных пластин вместе с компонентами тепловой защиты. Затем обмотки катушки и пакет заливаются теплопроводной эпоксидной смолой.
Вторичная обмотка, известная как ротор в традиционном роторном асинхронном двигателе, представляет собой реактивную пластину. Эта пластина может состоять из алюминия или меди и стальной подложки. Длина реактивной пластины равна длине катушки плюс ход. Система подшипников необходима для поддержания воздушного зазора между первичным и вторичным.
Эта пластина может состоять из алюминия или меди и стальной подложки. Длина реактивной пластины равна длине катушки плюс ход. Система подшипников необходима для поддержания воздушного зазора между первичным и вторичным.
Линейные асинхронные двигатели могут производиться с широким диапазоном мощности, скорости и занимаемой площади. Для односторонних сборок реакционная пластина состоит из алюминия толщиной 1/8 дюйма, на которую опирается стальная пластина толщиной 1/4 дюйма, а для двусторонних сборок реакционная пластина изготавливается только из алюминия или меди толщиной 1/8 дюйма. Если реакционная пластина круглая и имеет центральный вал с вращающимися подшипниками, система будет производить вращательное движение. .
Зачем использовать линейный асинхронный двигатель?
Линейные асинхронные двигатели идеально подходят для приложений, требующих быстрого перемещения больших грузов. Линейные асинхронные двигатели могут развивать скорость свыше 1800 дюймов в секунду (45 м/с) и ускорение в диапазоне от 3 до 4 g. Стандартные LIM могут создавать силы в диапазоне 720 фунтов (3200 Н) при рабочем цикле 3%. Несколько двигателей могут использоваться в сочетании друг с другом для создания больших усилий.
Линейные асинхронные двигатели могут развивать скорость свыше 1800 дюймов в секунду (45 м/с) и ускорение в диапазоне от 3 до 4 g. Стандартные LIM могут создавать силы в диапазоне 720 фунтов (3200 Н) при рабочем цикле 3%. Несколько двигателей могут использоваться в сочетании друг с другом для создания больших усилий.
Применение линейных асинхронных двигателей
LIM можно найти в аттракционах тематических парков, водных аттракционах, системах перемещения людей, высокоскоростном транспорте и двигателях на магнитной подвеске. Вот несколько хорошо известных примеров:
Hyperloop
Hyperloop — это высокоскоростная транспортная система для пассажиров и грузов, включающая в себя трубы пониженного давления, капсулы под давлением, линейные асинхронные двигатели и воздушные компрессоры. Линейные асинхронные двигатели используются для приведения в движение и замедления контейнеров по рельсам и по трубам. LIM являются реверсивными, поэтому тот же двигатель, который двигает капсулу в одном направлении по дорожке, можно использовать для движения капсулы обратно в исходное положение. Капсулы потенциально могут «плавать» на воздушном подшипнике, чтобы устранить трение.
Капсулы потенциально могут «плавать» на воздушном подшипнике, чтобы устранить трение.
Горная железная дорога Большого Грома в Диснейленде
Горная железная дорога Большого Грома — одна из первых американских горок, в которой используются линейные асинхронные двигатели для ускорения автомобилей на выезде со станции. Это позволяет автомобилям начинать движение на высоких скоростях из стационарного состояния без типичного старта в гору и цепью. LIM также используются для парковки автомобилей на складе.
California Screamin в Диснейленде
California Screamin использует LIM для запуска автомобилей американских горок. Они снова используются в дальнейшем для ускорения автомобилей, когда они едут по холмам.
Tomorrowland Transit Authority в Walt Disney World, Magic Kingdom Park
Линейные асинхронные двигатели приводят в действие Tomorrowland Transit Authority (ранее известное как People Mover), перемещая большие автомобили на плавных, медленных скоростях по Tomorrowland.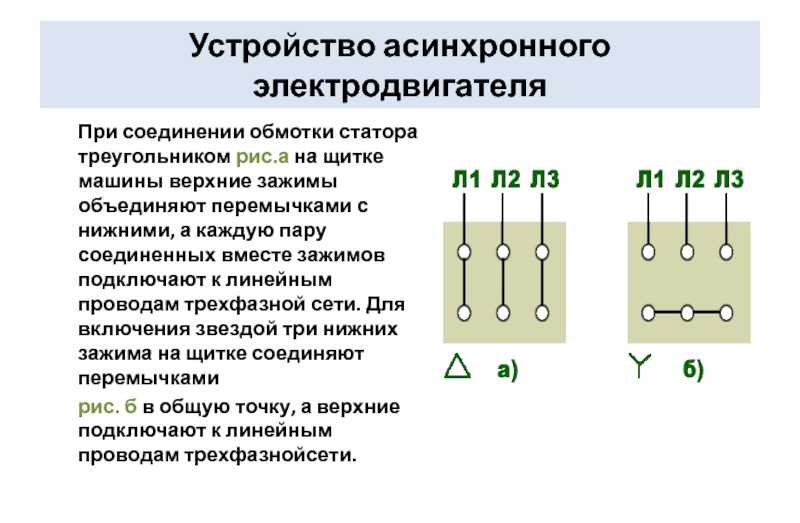
Даввама в аквапарке Yas Waterworld Абу-Даби, остров Яс
Первая часть водных горок Dawwama на острове Яс питается от LIMS. На каждом холме линейные асинхронные двигатели запускают трубы через подъемные участки. Этот способ движения водных горок называется гидромагнитной технологией.
Thunder Rapids в заливе Уайт-Уотер, Six Flags Fiesta Texas
Thunder Rapids, который откроется в 2017 году, станет первым водным каботажным судном в США, использующим гидромагнитную технологию. Линейные асинхронные двигатели в сочетании с турбинной технологией поддерживают скорость трубы вдоль горки и по холмам.
Что такое линейные асинхронные двигатели?
By Danielle Collins Оставить комментарий
Асинхронный двигатель — это двигатель, в котором ток в роторе индуцируется электромагнитным полем в статоре, что исключает использование магнитов. Линейный асинхронный двигатель — это тип линейного двигателя, основанный на вращающемся асинхронном двигателе переменного тока.
Как и линейные двигатели с постоянными магнитами (обычно обозначаемые как без железа, и с железным сердечником, типы ), линейные асинхронные двигатели состоят из первичной части (аналог статора в вращающемся асинхронном двигателе) и вторичной части (аналогично двигателю). ротор в поворотном варианте). Первичная обмотка состоит из трехфазной обмотки, собранной на пакете стальных пластин и залитого эпоксидной смолой.
Изображение предоставлено Кейтом Гиббсом.Вторичная обмотка состоит из того, что обычно называют «реакционной пластиной» — проводящей алюминиевой или медной пластины, обычно со стальной подложкой. (Сталь можно не использовать, но мощность двигателя будет значительно снижена.)
Для линейных асинхронных двигателей первичная обмотка состоит из пакета стальных пластин с обмотками, а вторичная обмотка представляет собой проводящую пластину (обычно из алюминия или меди) со стальной подложкой.Изображение предоставлено: Circuit Globe
Когда питание подается на первичную обмотку, магнитный поток развивается и распространяется по всей длине первичной обмотки. Вихревые токи индуцируются (отсюда и термин «асинхронный двигатель») в токопроводящем материале вторичной обмотки. Магнитный поток первичной обмотки и индуцированные токи вторичной обмотки взаимодействуют, создавая линейную силу.
Вихревые токи индуцируются (отсюда и термин «асинхронный двигатель») в токопроводящем материале вторичной обмотки. Магнитный поток первичной обмотки и индуцированные токи вторичной обмотки взаимодействуют, создавая линейную силу.
Линейные подшипники необходимы в линейных асинхронных двигателях для поддержания надлежащего воздушного зазора между первичной и вторичной частями. Линейные подшипники также поддерживают силы притяжения, возникающие между первичным и вторичным подшипниками при включении двигателя.
Распространенным вариантом является двухсторонний линейный асинхронный двигатель (DSLIM или DLIM), в котором реактивная пластина проходит между двумя первичными обмотками, обращенными друг к другу. В конструкциях DLIM реакционная пластина изготавливается только из проводящего материала (алюминий или медь) и не имеет стальной подложки. Двусторонняя конструкция создает более высокие усилия тяги и устраняет силы притяжения между первичной и второстепенной частями.
Изображение предоставлено: Circuit Globe
Линейные асинхронные двигатели могут быть подключены непосредственно к 3-фазному источнику переменного тока, если приложение будет работать на одной скорости. Для плавного и точного управления скоростью можно использовать частотно-регулируемый привод или векторный привод. (Обратите внимание, что однофазное питание переменного тока также можно использовать для линейных асинхронных двигателей, но КПД будет снижен.)
Линейная скорость первичной обмотки пропорциональна частоте питающего напряжения и шагу полюсов пластин первичной части.
Где:
В с = скорость статора (первичная) (м/с)
t = шаг полюсов (м)
с = частота мощности питание (Гц) Но линейные асинхронные двигатели являются асинхронными, что означает, что вторичная обмотка движется со скоростью, меньшей, чем магнитное поле первичной обмотки. Разница в скорости называется «скольжением».
Разница в скорости называется «скольжением».
Где:
В r = скорость ротора (вторичная) (м/с)
с = скольжение и размер воздушного зазора, а также влияние торцевых эффектов. А поскольку линейные асинхронные двигатели имеют более низкий КПД, охлаждение может оказывать заметное влияние на способность двигателя создавать тягу. По этой причине производители обычно предоставляют диаграммы циклов сила-скорость и сила-нагрузка для выбора двигателя.
На производство силы влияют несколько факторов, в том числе подаваемое напряжение, воздушный зазор и скорость двигателя.Изображение предоставлено: h3W Technologies
Конечные эффекты вызваны относительным движением между первичной и вторичной частями и вызывают неравномерное распределение потока в воздушном зазоре с более слабым потоком на передней кромке первичного и более сильным потоком на задний край. Это может привести к эффекту торможения (противодействию движению), особенно при малом скольжении.
