Как работают линейные стабилизаторы напряжения. Каковы их основные характеристики. Какие особенности нужно учитывать при выборе и применении линейных стабилизаторов. На что обратить внимание при проектировании схем с линейными стабилизаторами.
Принцип работы линейных стабилизаторов напряжения
Линейные стабилизаторы напряжения (также называемые LDO — Low Dropout Regulators) — это электронные устройства, предназначенные для преобразования нестабильного входного напряжения в стабильное выходное напряжение. Их основная задача — поддерживать постоянное выходное напряжение независимо от колебаний входного напряжения и тока нагрузки.
Как работает линейный стабилизатор напряжения?
- На вход подается нестабильное напряжение, превышающее требуемое выходное
- Внутри стабилизатора есть регулирующий элемент (транзистор), который работает как переменное сопротивление
- Схема отрицательной обратной связи постоянно измеряет выходное напряжение
- При отклонении выходного напряжения система управления меняет сопротивление регулирующего элемента
- Это поддерживает выходное напряжение на заданном уровне
Таким образом, линейный стабилизатор напряжения работает как «автоматический делитель напряжения», подстраивающийся под изменения входного напряжения и тока нагрузки.

Основные характеристики линейных стабилизаторов
При выборе линейного стабилизатора напряжения важно учитывать следующие ключевые параметры:
- Входное напряжение — максимально допустимое и минимально необходимое
- Выходное напряжение — фиксированное или регулируемое
- Максимальный выходной ток
- Падение напряжения (dropout voltage) — минимальная разница между входным и выходным напряжением
- КПД — обычно не превышает 50-60%
- Точность стабилизации выходного напряжения
- Уровень пульсаций и шумов на выходе
- Температурный диапазон работы
Какие из этих параметров наиболее критичны? Это зависит от конкретного применения. Для маломощных устройств с батарейным питанием важен низкий ток потребления и малое падение напряжения. Для прецизионных схем критичны точность и уровень шумов.
Особенности применения линейных стабилизаторов
При использовании линейных стабилизаторов напряжения в реальных схемах нужно учитывать ряд важных моментов:
Тепловой режим работы
Линейные стабилизаторы рассеивают значительную мощность в виде тепла. Как рассчитать рассеиваемую мощность?

- P = (Vвх — Vвых) * Iнагр
- Где P — рассеиваемая мощность, Vвх и Vвых — входное и выходное напряжение, Iнагр — ток нагрузки
При большой разнице между входным и выходным напряжением и высоком токе нагрузки может потребоваться радиатор для отвода тепла. Иначе возможен перегрев и выход стабилизатора из строя.
Выбор внешних компонентов
- Емкость и тип конденсаторов указываются в документации на стабилизатор
- Важно использовать качественные конденсаторы с низким ESR
- Неправильный выбор может привести к самовозбуждению и нестабильной работе
Кроме того, может потребоваться входной защитный диод и выходной LC-фильтр для дополнительного подавления помех.
Особенности поведения линейных стабилизаторов
При проектировании схем с линейными стабилизаторами напряжения важно учитывать некоторые особенности их поведения в различных режимах:
Поведение при запуске
Как ведет себя линейный стабилизатор при включении питания? На что обратить внимание?

- Время выхода на режим может составлять от десятков микросекунд до единиц миллисекунд
- Возможен выброс напряжения на выходе в момент запуска
- Функция плавного запуска (soft-start) помогает избежать перегрузки при включении
Для ответственных применений рекомендуется проверить поведение стабилизатора при запуске осциллографом.
Реакция на изменение нагрузки
Как реагирует линейный стабилизатор на резкое изменение тока нагрузки? Это важно для импульсных нагрузок.
- При сбросе нагрузки возможен выброс напряжения на выходе
- При набросе нагрузки возможна кратковременная просадка выходного напряжения
- Время восстановления может составлять от единиц до сотен микросекунд
Для критичных нагрузок может потребоваться дополнительный выходной конденсатор большой емкости.
Шумовые характеристики линейных стабилизаторов
Для прецизионных аналоговых схем важно обеспечить низкий уровень шумов и пульсаций на выходе стабилизатора. На что обратить внимание?
- Собственный шум стабилизатора (обычно указывается в мкВ RMS)
- Коэффициент подавления пульсаций (PSRR) на разных частотах
- Уровень пульсаций входного напряжения
Как улучшить шумовые характеристики? Можно использовать дополнительный LC-фильтр на выходе или каскадное включение двух стабилизаторов.
Защитные функции линейных стабилизаторов
Современные линейные стабилизаторы напряжения обычно имеют встроенные схемы защиты. Какие виды защиты могут быть реализованы?
- Защита от короткого замыкания на выходе
- Защита от перегрева
- Защита от обратного напряжения
- Защита от перенапряжения на входе
Наличие этих защитных функций повышает надежность работы стабилизатора в реальных условиях. Однако нужно внимательно изучить документацию, чтобы понять особенности работы защиты.
Выбор линейного стабилизатора для конкретного применения
При выборе оптимального линейного стабилизатора напряжения для вашего проекта рекомендуется следующий алгоритм:
- Определите требуемые входные и выходные напряжения
- Рассчитайте максимальный ток нагрузки
- Выберите стабилизаторы с подходящими параметрами
- Проверьте тепловой режим работы
- Учтите дополнительные требования (шумы, защита и т.д.)
- Сравните стоимость и доступность вариантов
- Проведите практическое тестирование выбранных моделей
Правильный выбор линейного стабилизатора напряжения поможет обеспечить стабильную и надежную работу вашего устройства.

Что такое линейный стабилизатор напряжения?
Добавлено 15 февраля 2020 в 22:04
Сохранить или поделиться
Рассмотрим основы линейных стабилизаторов напряжения в этом кратком учебном обзоре.
Электронные системы обычно получают напряжение питания, превышающее напряжение, которое требуется для схемы системы. Например, батарея 9 В может использоваться для питания усилителя, которому требуется напряжение в диапазоне от 0 до 5 В, или две последовательно соединенные батареи по 1,5 В могут обеспечивать питание для цепи, которая включает в себя цифровую логику с уровнями 1,8 В. В таких случаях нам необходимо отрегулировать подаваемое питания, используя компонент, который принимает более высокое напряжение и выдает более низкое напряжение.
Одним из наиболее распространенных способов достижения такого типа регулирования является использование линейного стабилизатора напряжения.
Рисунок 1 – Схема линейного стабилизатора с фиксированным выходным напряжениемКак работает линейный стабилизатор напряжения?
Линейные стабилизаторы напряжения, также называемые LDO (low-dropout linear regulator) или линейными стабилизаторами с малым падением напряжения, используют транзистор, управляемый цепью отрицательной обратной связи, для создания заданного выходного напряжения, которое остается стабильным, несмотря на изменения тока нагрузки и входного напряжения.
Базовый линейный стабилизатор с фиксированным выходным напряжением представляет собой трехвыводное устройство, как показано на схеме выше. Некоторые линейные стабилизаторы позволяют регулировать выходное напряжение с помощью внешнего резистора.
Недостатки линейных регуляторов напряжения
Серьезным недостатком линейных стабилизаторов является их низкая эффективность во многих применениях. Транзистор внутри стабилизатора, который подключен между входном и выходным выводами, работает как переменное последовательное сопротивление; таким образом, высокая разность входного и выходного напряжений в сочетании с высоким током нагрузки приводят к значительному рассеиванию мощности. Ток, необходимый для работы внутренней схемы регулятора, обозначенный на схеме IGND, также способствует увеличению итогового рассеивания мощности.
Возможно, наиболее вероятный режим отказа в схемы линейного стабилизатора обусловлен еще и тепловыми, а не только электрическими факторами. Мощность, рассеиваемая микросхемой стабилизатора, приведет к повышению температуры компонентов, и без соответствующих путей, позволяющих отводить тепло от стабилизатора, температура в конечном итоге может стать достаточно высокой, чтобы серьезно ухудшить его рабочие характеристики или вызвать отключение при перегреве. Эта важная тема освещена в статье о тепловом проектировании для линейных стабилизаторов.
Мощность, рассеиваемая микросхемой стабилизатора, приведет к повышению температуры компонентов, и без соответствующих путей, позволяющих отводить тепло от стабилизатора, температура в конечном итоге может стать достаточно высокой, чтобы серьезно ухудшить его рабочие характеристики или вызвать отключение при перегреве. Эта важная тема освещена в статье о тепловом проектировании для линейных стабилизаторов.
Применение линейных стабилизаторов напряжения
Хотя линейные стабилизаторы обычно уступают по эффективности импульсным стабилизаторам, они всё ещё широко используются по нескольким причинам. Основными преимуществами являются простота использования, низкий уровень шума на выходе и низкая стоимость. Единственными внешними компонентами, которые требуются большинству линейных стабилизаторов, являются входной и выходной конденсаторы, а требования к их емкости достаточно гибкие, чтобы сделать задачу проектирования очень простой.
Заключение
Данная статья предназначена для быстрого получения информации. Что нужно знать о линейных стабилизаторах напряжения? Дайте нам знать в комментариях ниже.
Что нужно знать о линейных стабилизаторах напряжения? Дайте нам знать в комментариях ниже.
Оригинал статьи:
Теги
LDO (low-dropout linear regulator) / Линейный стабилизатор с малым падением напряженияЛинейный стабилизаторЛинейный стабилизатор напряженияОбучениеСтабилизатор напряженияСохранить или поделиться
Нужен стабилизатор тока? Используйте стабилизатор напряжения!
Добавлено 9 ноября 2020 в 03:11
Сохранить или поделиться
В данной статье показано, как линейные стабилизаторы напряжения могут быть полезны и в приложениях стабилизации тока.
Линейные стабилизаторы напряжения, также (несколько неточно) называемые LDO, являются одними из наиболее распространенных электронных компонентов. Например, LM7805 приобрел почти легендарный статус и непременно был бы включен в зал славы интегральных микросхем, если бы такой зал существовал.
Действительно, линейные стабилизаторы удобны, эффективны и универсальны. И на самом деле они могут быть даже более универсальными, чем вы думаете. Схемы линейных стабилизаторов построены на использовании отрицательной обратной связи, как показано на следующей диаграмме, взятой из того же примечания к применению:
Рисунок 1 – Схема линейного стабилизатора напряженияВ предыдущей статье (исследование преобразователя напряжения в ток) мы исследовали использование отрицательной обратной связи в преобразователях напряжения в ток, которые могут точно контролировать яркость светодиода. Если вы знакомы с этими методами, для вас не будет сюрпризом, что для получения стабилизированного тока мы можем использовать стабилизатор напряжения, такой как LT3085.
Если вы знакомы с этими методами, для вас не будет сюрпризом, что для получения стабилизированного тока мы можем использовать стабилизатор напряжения, такой как LT3085.
В данной статье мы рассмотрим простой светодиодный драйвер на базе LT3085.
Линейный стабилизатор против операционного усилителя
Прежде чем мы проанализируем саму схему, мы должны обсудить преимущества подхода с линейным стабилизатором для получения стабилизированного тока. Методы с операционным усилителем, представленные в предыдущих статьях, несомненно, эффективны, так зачем возиться с новым методом?
Вот некоторые моменты, которые следует учитывать:
- Большинство операционных усилителей не рассчитано на высокий выходной ток, поэтому схема на основе линейного стабилизатора позволяет избежать ограничений по выходному току типовых операционных усилителей.
- Микросхема стабилизатора имеют защиту от перегрева.
- Линейные стабилизаторы обеспечивают бо́льшую устойчивость к большим входным напряжениям и высокой рассеиваемой мощности.
- Возможно, вы сможете найти один компонент, который подойдет практически для всех ваших требований по стабилизации напряжения и получения тока. Моим наименее любимым аспектом проектирования схем/печатных плат является создание запасов новых компонентов, поэтому я стараюсь использовать детали, которые могут пригодиться для будущих проектов.
LT3085 как стабилизатор напряжения
Давайте вкратце рассмотрим работу стабилизации напряжения LT3085. Эта информация поможет нам понять реализацию источника тока.
Ниже типовая конфигурация стабилизатора напряжения:
Рисунок 3 – Схема взята из технического описания LT3085Источник тока (10 мкА) создает напряжение на Rнастр. Это напряжение появляется на неинвертирующем входе усилителя. Действие отрицательной обратной связи гарантирует, что напряжение на инвертирующем входе равно напряжению на неинвертирующем входе; другими словами, выходное напряжение равно напряжению на Rнастр. Выходной конденсатор необходим для обеспечения стабильности, а транзистор, подключенный к выходу усилителя, будет выглядеть очень знакомым, если вы читали мою статью «Как буферизовать выход операционного усилителя для получения более высокого тока».
От напряжения к току
Назначение стабилизатора напряжения – обеспечить неизменное выходное напряжение независимо от сопротивления нагрузки. Другими словами, идеальный стабилизатор будет выдавать напряжение, которое (например) равно 3,3 В при подключении к нагрузке 100 кОм и ровно 3,3 В при подключении к нагрузке 5 Ом. Что, конечно, меняется, так это ток нагрузки, который полностью определяется сопротивлением нагрузки (потому что напряжение на нагрузке не изменяется).
Что же произойдет, если мы дадим идеальному стабилизатору напряжения фиксированное сопротивление нагрузки? Если напряжение нагрузки не меняется и сопротивление нагрузки не меняется, и если закон Ома всё еще действует, то ток тоже не изменится.
Вуаля: источник тока.
На следующей диаграмме показано, как использовать LT3085 для решения задач, связанных с управлением светодиодами.
Рисунок 4 – Схема взята из технического описания LT3085Вот как это работает:
- Внутренний источник тока посылает 10 мкА через R1, генерируя напряжение, которое будет равно выходному напряжению (т.
 е. напряжению на R2).
е. напряжению на R2). - Это выходное напряжение постоянно (потому что сопротивление R1 и значение силы тока внутреннего источника тока постоянны).
- Это постоянное выходное напряжение будет создавать неизменный ток через R2, потому что сопротивление R2 постоянно.
- Инвертирующий вход усилителя не выдает ток, поэтому почти весь ток R2 идет от положительного источника питания через транзистор, подключенный к выходу усилителя. (Я говорю «почти», потому что ток эмиттера биполярного транзистора представляет собой сумму тока базы и тока коллектора, но ток базы намного меньше тока коллектора.)
- Светодиод включен последовательно с коллектором биполярного транзистора, и поэтому ток через светодиод фиксирован и (почти) равен току, протекающему через R2.
Ток через светодиод можно изменить, изменив значение R1 или R2; как показано в следующем уравнении, ток через светодиод – это просто значение силы тока внутреннего источника тока, умноженное на отношение R1 к R2.
\[I_{LED}=\frac{((10 \ мкА)\times R1)}{R2}=10 \ мкА \times \frac{R1}{R2}\]
Я бы назвал это довольно удобной схемой: процесс проектирования чрезвычайно прост, и требуется лишь несколько компонентов. Если вы замените один из резисторов потенциометром, результатом станет высокоточный светодиодный драйвер с регулируемым током с широким диапазоном входных напряжений и защитой от перегрева, который может обеспечивать ток до 500 мА.
И, конечно, эта схема не ограничивается светодиодами; вы могли бы так же легко использовать ее, скажем, с резистивным нагревательным элементом. Это позволит вам, несмотря на колебания напряжения питания, генерировать постоянное тепло (потому что P = I2R).
Заключение
Мы обсудили простой, но высокопроизводительный источник тока на базе микросхемы стабилизатора напряжения от Linear Tech. Я предполагаю, что аналогичные схемы на стабилизаторах доступны и у других производителей.
Мне нравится всегда включать моделирование SPICE в статьи, но в данном случае это казалось действительно ненужным. Однако прежде чем я написал статью, я проверил, что в LTspice действительно есть компонент LT3085 (в папке «[PowerProducts]«). Поэтому, если вы захотите исследовать эту схему дальше, то сможете легко это сделать.
Однако прежде чем я написал статью, я проверил, что в LTspice действительно есть компонент LT3085 (в папке «[PowerProducts]«). Поэтому, если вы захотите исследовать эту схему дальше, то сможете легко это сделать.
Оригинал статьи:
Теги
LED / СветодиодLED драйвер / Светодиодный драйверЛинейный стабилизаторСтабилизатор напряженияСтабилизатор токаСтабилизация токаСхемотехникаСохранить или поделиться
Тепловое проектирование для линейных стабилизаторов напряжения
Добавлено 12 октября 2019 в 21:39
Сохранить или поделиться
Будет ли ваш линейный стабилизатор работать правильно при всех возможных условиях эксплуатации? Чтобы это выяснить, нужно учитывать рассеиваемую мощность и тепловое сопротивление.
Вспомогательная информация
Разработчик, будь осторожен
На первый взгляд линейные стабилизаторы напряжения кажутся такими простыми. В техническом описании на деталь указаны максимальное входное напряжение, максимальный выходной ток и выходное напряжение (если выходной сигнал является фиксированным, а не переменным). Если ваши требования к проектированию немного выше, вы также можете проверить точность выходного напряжения, падение напряжения, выходной шум и диапазон рабочих температур окружающей среды. Если все эти характеристики выглядят хорошо, вы можете взять эту деталь, и всё будет хорошо, верно? Ну, в большинстве случаев, да, всё будет хорошо, но также возможно, что проект полностью провалится.
В техническом описании на деталь указаны максимальное входное напряжение, максимальный выходной ток и выходное напряжение (если выходной сигнал является фиксированным, а не переменным). Если ваши требования к проектированию немного выше, вы также можете проверить точность выходного напряжения, падение напряжения, выходной шум и диапазон рабочих температур окружающей среды. Если все эти характеристики выглядят хорошо, вы можете взять эту деталь, и всё будет хорошо, верно? Ну, в большинстве случаев, да, всё будет хорошо, но также возможно, что проект полностью провалится.
Ток против мощности
Первое, что нужно понять, это то, что максимальный выходной ток детали не является изолированным параметром. Выходной ток влияет на рассеиваемую мощность, а рассеиваемая мощность влияет на температуру PN переходов, и если температура PN переходов становится слишком высокой, деталь перестает работать как нужно. Возможно необратимое повреждение, хотя большинство (возможно, все) современных линейных стабилизаторов включают в себя схемы тепловой защиты, которые просто ограничивают выходной ток в попытке снизить внутреннюю температуру. В любом случае, ваш проект будет работать со сбоями; что еще хуже, это может привести к неисправностям, возникающим странным или прерывистым образом, что может привести к потенциально высоким уровням разочарований, вызванных устранением неисправностей. Лучшее лекарство, как обычно, это профилактика.
В любом случае, ваш проект будет работать со сбоями; что еще хуже, это может привести к неисправностям, возникающим странным или прерывистым образом, что может привести к потенциально высоким уровням разочарований, вызванных устранением неисправностей. Лучшее лекарство, как обычно, это профилактика.
Две температуры
Подтверждая, что конкретный компонент совместим с температурными требованиями системы, мы обычно смотрим на диапазон рабочих температур окружающей среды, указанный в техническом описании детали. Это подходит для большинства ситуаций, но, тем не менее, довольно неточно. Строго говоря, температура окружающей среды не определяет, будет ли компонент работать правильно, точно так же, как температура воздуха на улице напрямую не определяет, удобно ли вам находиться в вашем доме. Что действительно важно, так это внутренняя температура, то есть температура, при которой находятся полупроводники – в конце концов, именно транзисторы регулируют напряжение, а не пластиковый корпус. Эта внутренняя температура называется температурой перехода (PN перехода).
Эта внутренняя температура называется температурой перехода (PN перехода).
Обычно мы можем рассматривать только диапазон температур окружающей среды потому, что температура PN перехода часто аналогична температуре окружающей среды. Если вы живете в продуваемой деревянной лачуге и готовите на открытом воздухе на открытом огне, температура внутри лачуги не будет сильно отличаться от температуры на улице. Это просто тепловое равновесие в действии. То же самое происходит со многими электронными компонентами, потому что многие электронные компоненты не рассеивают значительное количество энергии. Это критически важный момент. Датчики, преобразователи данных, микроконтроллеры, логические элементы и т. д. имеют склонность рассеивать небольшие количества энергии, и, следовательно, температура PN перехода не сильно отличается от температуры окружающей среды. Но линейные стабилизаторы напряжения это отдельная история. Представьте, что вы пекли хлеб в этой деревянной лачуге целый день. Это более или менее то, что делает стабилизатор напряжения, и в результате получается температура перехода, которая может значительно превышать температуру окружающей среды. Следовательно, одним из ключей к надежной конструкции линейного стабилизатора является обеспечение того, чтобы температура перехода оставалась в допустимом диапазоне даже при наихудших условиях эксплуатации.
Это более или менее то, что делает стабилизатор напряжения, и в результате получается температура перехода, которая может значительно превышать температуру окружающей среды. Следовательно, одним из ключей к надежной конструкции линейного стабилизатора является обеспечение того, чтобы температура перехода оставалась в допустимом диапазоне даже при наихудших условиях эксплуатации.
Во-первых, рассчитаем мощность
Двумя факторами, определяющими разницу между температурой окружающей среды и температурой перехода, являются рассеиваемая мощность и тепловое сопротивление. Сначала давайте рассмотрим рассеивание мощности.
Рисунок 1 – Определение мощности, рассеиваемой линейным стабилизатором напряженияНа этой диаграмме показаны два пути протекания тока в линейном стабилизаторе; путь от входного вывода непосредственно к земле называется током на землю (IGND), а путь от входного вывода к земле через питаемую цепь – ток нагрузки (Iнагр). Внутреннее рассеивание мощности в результате протекания этих двух токов
\[P_{I_{GND}}\ \ =I_{GND}\times V_{вх}\]
\[P_{I_{нагр}}\ \ \ =I_{нагр}\times\left(V_{вх}-V_{вых}\right)\]
Таким образом, общая рассеиваемая мощность внутри стабилизатора будет равна:
\[P_{общ}=\left(I_{GND}\times V_{вх}\right)+\left(I_{нагр}\times\left(V_{вх}-V_{вых}\right)\right)\]
Ток на землю, то есть ток, потребляемый внутренней схемой регулятора в процессе генерации регулируемого выходного напряжения, обычно будет намного меньше, чем ток нагрузки. Поэтому, если вы не хотите проверять технические спецификации тока на землю, вы можете просто проигнорировать этот параметр, и результат всё равно будет довольно близок к реальности.
Поэтому, если вы не хотите проверять технические спецификации тока на землю, вы можете просто проигнорировать этот параметр, и результат всё равно будет довольно близок к реальности.
Тепловое сопротивление
Мощность, рассеиваемая внутри стабилизатора, приводит к постоянному различию между температурой перехода и температурой окружающей среды. Итак, мы знаем, что внутренняя схема стабилизатора всегда будет горячее окружающей среды; вопрос в том, насколько горячее? Здесь в игру вступает тепловое сопротивление. Как следует из названия, эта величина соответствует тому, насколько сильное сопротивление оказывается потоку тепла. В контексте конструкции стабилизатора более высокое тепловое сопротивление означает, что существует более высокое сопротивление к теплу, которое хочет перетекать из внутренней части стабилизатора в окружающую среду. Более высокое сопротивление означает меньший тепловой поток, а меньший тепловой поток означает бо́льшую разницу температур в установившемся режиме. Это соотношение отражено в следующей формуле, где тепловое сопротивление обозначено, как θ, и имеет единицы измерения °C/Вт.
Это соотношение отражено в следующей формуле, где тепловое сопротивление обозначено, как θ, и имеет единицы измерения °C/Вт.
\[\Delta T_{переход-окр.среда}=P_{общ}\times\theta_{переход-окр.среда}\]
Таким образом, если вам известны рассеиваемая мощность стабилизатор (Pобщ) и тепловое сопротивление от внутренней схемы к окружающей среде (θпереход-окр.среда), вы можете рассчитать разницу между температурой окружающей среды и температурой перехода (ΔTпереход-окр.среда). К сожалению, определить θпереход-окр.среда не совсем не так просто.
Первое, что нужно понять, это то, что θпереход-окр.среда не является фиксированной величиной. Оно зависит от вашего проекта печатной платы. На самом деле, это важный момент: вы не можете предполагать, что диапазон температуры окружающей среды, указанный в техническом описании стабилизатора, действителен для всех вариантов компоновки печатных плат. Другими словами, если вы подвергаете стабилизатор максимальному входному напряжению и максимальному выходному току, компоновка печатной платы с высоким тепловым сопротивлением может вызвать перегрев детали, даже если температура окружающей среды остается в допустимом диапазоне.
Тщательное тепловое проектирование может быть решающим моментом!
Давайте рассмотрим пример, чтобы продемонстрировать важность учета теплового сопротивления в ваших проектах со стабилизаторами напряжения. Этот пример использует стабилизатор напряжения ADP3338 с низким падением напряжения от Analog Devices. Его необходимые технические параметры приведены ниже:
| Максимальный ток нагрузки | 1000 мА |
| Максимальный ток на землю | 30 мА |
| Выходное напряжение | 3,3 В |
| Максимальное входное напряжение | 8 В |
| Максимальная температура перехода | 150°C |
| Максимальная температура окружающей среды | 85°C |
Итак, сначала нам нужно ответить на следующий вопрос: если устройство подвергается наихудшим условиям эксплуатации, насколько низким должно быть тепловое сопротивление? Мы можем изменить приведенную выше формулу следующим образом:
\[\theta_{переход-окр. {\circ}C}{Вт}\]
{\circ}C}{Вт}\]
Всё идет нормально… кроме того, что такое низкое тепловое сопротивление невозможно обеспечить! Рассмотрим следующую диаграмму из технического описания ADP3338:
Рисунок 2 – Значения теплового сопротивления при различных вариантах компоновки печатной платыЭта диаграмма предназначена для того, чтобы дать вам представление о том, какое тепловое сопротивление следует ожидать от различных вариантов компоновки печатных плат. Так что, если вы просто припаяете этот регулятор к вашей плате, не предоставляя никакой дополнительной меди для рассеивания тепла, тепловое сопротивление будет выше примерно в десять раз. Даже самая правая схема, включающая в себя довольно большую медную площадку, дает всё еще намного большее тепловое сопротивление, чем 13,2°C/Вт, необходимые для работы в худшем случае. Вы можете дополнительно уменьшить тепловое сопротивление, расширив площадь медной площадки и используя многочисленные переходные отверстия, чтобы обеспечить теплу путь к другим слоям печатной платы, но даже в этом случае вы никогда не достигнете 13,2°C/Вт. Это связано с тем, что тепловое сопротивление «переход – окружающая среда» является суммой теплового сопротивления «корпус – окружающая среда» (зависит от компоновки) и теплового сопротивления «переход – корпус» (зависит только от корпуса микросхемы). Тепловое сопротивление «переход – корпус» у ADP3338 составляет 26,8°C/Вт – уже в два раза больше, чем общее тепловое сопротивление, необходимое для наихудших условий эксплуатации. Конечно, это крайний пример. На практике вы не доводите деталь до предела, подобного этому. Обычно требуемое тепловое сопротивление достижимо, но вам может потребоваться что-то, гораздо большее, чем минимальные медные площадки.
Это связано с тем, что тепловое сопротивление «переход – окружающая среда» является суммой теплового сопротивления «корпус – окружающая среда» (зависит от компоновки) и теплового сопротивления «переход – корпус» (зависит только от корпуса микросхемы). Тепловое сопротивление «переход – корпус» у ADP3338 составляет 26,8°C/Вт – уже в два раза больше, чем общее тепловое сопротивление, необходимое для наихудших условий эксплуатации. Конечно, это крайний пример. На практике вы не доводите деталь до предела, подобного этому. Обычно требуемое тепловое сопротивление достижимо, но вам может потребоваться что-то, гораздо большее, чем минимальные медные площадки.
Заключение
Правильное тепловое проектирование линейных стабилизаторов легко упустить из виду, поскольку во многих случаях рабочие условия настолько далеки от наихудших, поэтому проект будет работать, даже если вы никогда не вспомните про тепловое сопротивление. Но процесс на самом деле довольно прост, и он может спасти вашу плату от печального выхода из строя при высокой температуре окружающей среды. Вы просто рассчитываете рассеивание мощности в худшем случае, а затем на основе информации из технического описания компонента (или аналога) оцениваете тепловое сопротивление. После этого вы можете рассчитать максимальную температуру окружающей среды, при которой температура перехода устройства будет ниже указанного максимума.
Вы просто рассчитываете рассеивание мощности в худшем случае, а затем на основе информации из технического описания компонента (или аналога) оцениваете тепловое сопротивление. После этого вы можете рассчитать максимальную температуру окружающей среды, при которой температура перехода устройства будет ниже указанного максимума.
Оригинал статьи:
Теги
PCB (печатная плата)Линейный стабилизаторПроектирование печатных платСтабилизатор напряженияТемпература переходаТепловое сопротивлениеТермическое сопротивлениеСохранить или поделиться
Пять особенностей линейных стабилизаторов, о которых нужно знать
16 января 2019
С первого взгляда линейные регуляторы (LDO) кажутся достаточно простыми компонентами, однако очень часто возникают ситуации, когда они работают нештатно. В данной статье рассматриваются пять особенностей стабилизаторов: поведение LDO при запуске, потребление LDO при малых входных напряжениях, особенности отклика LDO при изменении нагрузки, влияние собственного шума и PSRR стабилизатора на общий выходной шум, а также реализация входной защиты LDO. Понимание этих особенностей делает выбор стабилизатора более осознанным и упрощает процесс отладки. Приводятся примеры
Понимание этих особенностей делает выбор стабилизатора более осознанным и упрощает процесс отладки. Приводятся примеры
В настоящий момент выбор подходящего линейного стабилизатора зачастую заключается в просмотре бесконечных таблиц с применением параметрических фильтров. Какое выходное напряжение нужно? Каков максимальный нагрузочный ток? Каково предельно допустимое входное напряжение? Какой диапазон входных напряжений требуется? Какое следует выбрать корпусное исполнение? Какие габариты будут у компонентов обвязки? Перечень подходящих регуляторов может быть уменьшен с учетом дополнительных параметров. Например, что если нагрузка чувствительна к колебаниям напряжения питания? Тогда стабилизатор должен обладать очень малым собственным шумом и высоким коэффициентом подавления нестабильности питания (PSRR). Если же разрабатывается устройство с батарейным питанием, то потребуется регулятор со сверхмалым уровнем потребления.
С учетом перечисленных требований исходный список стабилизаторов сократится до нескольких подходящих моделей. Но это еще не все. Перед тем как сделать окончательный выбор, нужно ответить еще на пять вопросов:
- Как регулятор ведет себя при запуске?
- Останется ли ток потребления малым, если входное напряжение окажется на нижней границе рабочих напряжений (или даже меньше)?
- Как ведет себя стабилизатор при изменении нагрузки?
- Что является основным источником выходного шума: собственный шум стабилизатора или внешний шум из-за малого значения PSSR?
- Как стабилизатор ведет себя при выключении?
Эти вопросы могут показаться не такими важными, пока не возникнут проблемы. Но когда проблемы появятся вы, скорее всего, почувствуете себя обманутым или, по крайней мере, недостаточно осведомленным. Придется потратить дополнительное время на устранение неполадок и, возможно, на доработку своей платы.
Попробуем пролить свет на эти вопросы. Возможно, предложенная информация будет полезна в ближайшем будущем при очередном выборе линейного регулятора.
Возможно, предложенная информация будет полезна в ближайшем будущем при очередном выборе линейного регулятора.
Запуск
Многие стабилизаторы имеют вход разрешения, с помощью которого можно включать и выключать регулятор при необходимости экономии энергии. Обычно в таких стабилизаторах есть также функция плавного запуска (Soft Start). Плавный запуск предотвращает перегрузку регулятора при включении. Данная функция может быть реализована двумя способами.
Плавный запуск с ограничением тока
Первый способ – плавный запуск с ограничением тока (Current Soft Start). В большинстве регуляторов существует ограничение выходного тока. Функция плавного запуска заключается в плавном или пошаговом увеличении тока ограничения при запуске (рисунок 1). При этом выходное напряжение будет плавно нарастать, так как ток заряда выходного конденсатора оказывается меньше, чем максимально допустимый нагрузочный ток стабилизатора. Преимущество данного подхода заключается в том, что входной ток регулятора будет плавно увеличиваться согласно заданному шаблону, и помехи от пускового тока нагрузки не будут передаваться на вход стабилизатора.
Рис. 1. Временные диаграммы режимов плавного запуска с ограничением тока и напряжения
Анализируя переходные процессы при включении стабилизатора, можно обнаружить, что на осциллограмме выходного напряжения есть точки перелома, в которых напряжение начинает уменьшаться. Рассмотрим эту особенность подробнее. После включения линейного регулятора происходит заряд выходного конденсатора и питание нагрузки. Если выходной ток превышает значение тока ограничения, напряжение на нагрузке падает ниже определенного уровня и происходит его возврат в состояние сброса. Далее цикл повторяется, и нагрузка то включается, то выключается. В конце концов, значение тока ограничения становится достаточно высоким, чтобы обеспечить необходимый ток, и схема начинает работать в штатном режиме.
Плавный запуск с ограничением напряжения
Второй способ – плавный запуск с ограничением напряжения (Voltage Soft Start). При таком подходе выходное напряжение увеличивается плавно и линейно, без каких-либо скачков при включении (рисунок 1). Подобное поведение также защищает нагрузку от повторных сбросов, так как напряжение пересекает пороговую точку сброса один раз.
Подобное поведение также защищает нагрузку от повторных сбросов, так как напряжение пересекает пороговую точку сброса один раз.
В данном случае пусковой ток определяется выходной емкостью, скоростью нарастания выходного напряжения и током, потребляемым нагрузкой. Как правило, скорость нарастания выходного напряжения устанавливается на уровне, который обеспечивает пусковой ток в диапазоне 1…10% от максимального выходного тока (при использовании рекомендованного минимального выходного конденсатора). Установка пускового тока на уровне менее 10% позволяет использовать выходные конденсаторы большей емкости и компенсировать повышенный ток нагрузки. Недостатком системы запуска с ограничением напряжения является то, что входной ток зависит от нагрузки и не контролируется напрямую. А ее преимущество заключается в отсутствии множественных переходов нагрузки в состояние сброса.
На рисунке 1 представлено сравнение временных диаграмм режимов плавного запуска с ограничением тока и с ограничением напряжения.
Увеличение тока потребления при работе с малыми входными напряжениями
Если схема питается от аккумулятора, то величина собственного потребления стабилизатора имеет большое значение. Нагрузка может находиться в активном состоянии в течение краткого интервала времени, а потом надолго переходить в режим ожидания, экономя энергию. В этом случае время автономной работы будет в значительной степени определяться собственным потреблением регулятора. Если это так, вы, скорее всего, выберете линейный регулятор с минимальным питающим током.
Теперь представьте, что ваша аккумуляторная батарея разряжена до такой степени, что разница между входным и выходным напряжением стабилизатора становится минимальной. При работе в таком режиме стабилизатор старается как можно сильнее открыть внутренний силовой транзистор, чтобы обеспечить минимальное падение напряжения, даже если выходной ток нагрузки очень мал. Проблема заключается в том, что «усиленное» открывание транзистора приведет к увеличению потребления схемы управления затвором (рисунок 2). В результате режим ожидания превращается в режим быстрой разрядки батареи.
В результате режим ожидания превращается в режим быстрой разрядки батареи.
Рис. 2. Увеличение тока потребления при работе с малыми входными напряжениями из-за роста потребления схемы управления затвором силового транзистора
Подобное увеличение тока при работе с малыми входными напряжениями – не редкость даже для самых лучших стабилизаторов. Двукратный рост потребления не является чем-то необычным, а некоторые регуляторы характеризуются увеличением потребления в 10 раз и более. Иногда информация об увеличении потребляемого тока при работе с малыми входными напряжениями приводится в документации в виде таблиц и графиков. Однако чаще всего эта информация отсутствует.
Если в конкретном приложении величина тока потребления имеет большое значение, следует выбирать стабилизатор, для которого в документации приведена подробная информация об этом параметре или самостоятельно измерять уровень тока, чтобы убедиться, что регулятор отвечает предъявляемым требованиям.
Отклик стабилизатора на изменение нагрузки
Линейные регуляторы имеют возможность стабилизации выходного напряжения при изменении нагрузки. Когда происходит изменение нагрузки, напряжение на затворе встроенного силового транзистора также должно измениться. Время, необходимое для того чтобы напряжение на затворе достигло нового значения, обычно определяет уровень перерегулирования и недорегулирования.
Когда происходит изменение нагрузки, напряжение на затворе встроенного силового транзистора также должно измениться. Время, необходимое для того чтобы напряжение на затворе достигло нового значения, обычно определяет уровень перерегулирования и недорегулирования.
Обычно быстрый переход к полной нагрузке является худшим случаем с недорегулированием выходного напряжения. Перед сравнением динамических характеристик регуляторов всегда следует проверять значения начальных токов. Переход от нагрузки 10% к нагрузке 100% будет более быстрым, чем переход от начальной нагрузки 1% к нагрузке 100%, так как в первом случае выходное напряжение будет ближе к конечному значению. Гораздо труднее добиться хороших показателей при переходе от состояния с нулевой нагрузкой к полной нагрузке.
Можно предположить, что поддержание некоторого минимального тока нагрузки поможет избежать значительной задержки при включении максимальной нагрузки. Да, поможет, но это не всегда является хорошим решением. Дело в том, что при обратном переходе от полной нагрузки к минимальной часто возникает перерегулирование выходного напряжения. При этом регулятор находится в наиболее уязвимом состоянии, в котором его внутренний силовой транзистор полностью отключен. Если в этот момент нагрузка вновь увеличится, то будет наблюдаться недорегулирование, которое окажется еще более значительным, чем при первоначальном переходе.
Дело в том, что при обратном переходе от полной нагрузки к минимальной часто возникает перерегулирование выходного напряжения. При этом регулятор находится в наиболее уязвимом состоянии, в котором его внутренний силовой транзистор полностью отключен. Если в этот момент нагрузка вновь увеличится, то будет наблюдаться недорегулирование, которое окажется еще более значительным, чем при первоначальном переходе.
Если работа схемы предполагает наличие быстрых перепадов нагрузки, следует проверять динамические характеристики стабилизаторов с использованием описанного выше алгоритма. На рисунке 3 показано ухудшение отклика регулятора при повторном быстром увеличении нагрузки.
Рис. 3. Ухудшение отклика регулятора при повторном быстром увеличении нагрузки
Собственный шум стабилизатора и коэффициент подавления помех по питанию (PSRR)
Регуляторы, предназначенные для создания малошумящих приложений, как правило, обладают и высоким значением коэффициента подавления нестабильности питания (PSRR). Это логично, так как чувствительность нагрузки к помехам не зависит от причины их возникновения.
Это логично, так как чувствительность нагрузки к помехам не зависит от причины их возникновения.
Если стабилизатор подключен к импульсному регулятору, то малый коэффициент PSRR может создать больше проблем, чем собственный выходной шум стабилизатора. Рассмотрим случай совместного использования стабилизатора с понижающим импульсным регулятором для питания чувствительной к шуму нагрузки. Если на частоте 100 кГц пульсации выходного напряжения импульсного преобразователя составляют 50 мВ (от пика до пика), а величина PSRR линейного регулятора на той же частоте 100 кГц равна 60 дБ, то на выходе стабилизатора будут наблюдаться пульсации 50 мкВ (от пика до пика), что эквивалентно среднеквадратичному выходному шуму 15 мкВ. Допустим, выбран малошумящий стабилизатор, для которого в полосе частот 10 Гц…100 кГц собственный выходной шум составляет менее 5 мкВ (среднеквадратичное значение). Тогда окажется, что шум из-за входных пульсаций от DC/DC-преобразователя и малого PSRR будет в три раза выше собственного шума стабилизатора (рисунок 4).
Рис. 4. Общий выходной шум определяется вкладом PSRR
При работе с высокими выходными напряжениями собственный шум линейного регулятора может преобладать над PSRR. Это связано с тем, что собственный шум увеличивается в соответствии с делителем обратной связи. Рассмотрим схему, в которой линейный регулятор используется для преобразования зашумленного напряжения 17 В от повышающего DC/DC-преобразователя в напряжение 16 В с уровнем пульсацией менее 100 мВ. Если PSRR стабилизатора на частоте переключений составляет 60 дБ, то пульсации 50 мВ (от пика до пика) от повышающего преобразователя будут ослаблены до 50 мкВ (от пика до пика) или 15 мкВ (ср.кв.) на выходе. Шум 5 мкВ (ср.кв.) встроенного опорного источника может показаться малым и не представляющим опасности. Однако если сигнал обратной связи уменьшается до 1,25 В, а напряжение на резисторе обратной связи 16 В, то выходной шум составит 5 мкВ × (16 В/1,25 В) или 64 мкВ (ср.кв). Таким образом, собственный шум стабилизатора будет вносить основной вклад в общий выходной шум (рисунок 5).
Рис. 5. Увеличение выходного шума при работе с высокими напряжениями
При поиске оптимального стабилизатора для чувствительной нагрузки следует учитывать как выходной шум, так и PSRR.
Защита входа
Обычно в линейных регуляторах присутствует обратный диод, встроенный в силовой МОП-транзистор. Из-за этого диода выходное напряжение не может превышать входное напряжение больше, чем на 0,7 В. В большинстве случаев этот диод не влияет на работу стабилизатора, но есть два случая, когда он может создать проблемы.
Защита от обратного напряжения
Иногда возникают ситуации, когда на вход устройства подается напряжение питания обратной полярности, например, при использовании стандартных батареек. Хотя разъем для установки батареек в отсеке питания имеет особую формовку выводов и защищает от неправильного подключения, тем не менее, он не гарантирует полную защиту и допускает возможность ошибки с возникновением кратковременных обратных напряжений.
Защита от обратной полярности позволяет напряжению на входе быть меньше напряжения на выводе земли без существенного увеличения тока. Для этого необходимо отключить встроенный диод силового транзистора с помощью дополнительного последовательного ключа. У большинства регуляторов на входе есть диоды, защищающие от обратной полярности и электростатических разрядов (ESD). Их также необходимо исключить и использовать специализированную схему защиты (рисунок 6).
Рис. 6. Защита от обратного напряжения
Примером стабилизатора с защитой от обратной полярности является MAX1725, который способен выдерживать обратные напряжения до -12 В без значительного увеличения входного тока.
Защита от обратного тока
Очень часто защиту от обратного тока в линейных регуляторах путают с защитой от обратного напряжения. Хотя для ее реализации также требуется блокировка встроенного диода силового транзистора, тем не менее, механизм защиты имеет значительные отличия. На рисунке 7 показано как работает схема защиты от обратного тока.
Рис. 7. Защита от обратного тока
Рассмотрим случай, когда значительная емкостная нагрузка, например, аудиосистема со множеством развязывающих конденсаторов, питается от линейного регулятора. Предположим также, что линейный регулятор, в свою очередь, питается от мощного понижающего преобразователя. Кроме того, при выключении выход импульсного преобразователя замыкается на землю. Вполне ожидаемо, что при первом же выключении линейный регулятор выйдет из строя, так как конденсаторы нагрузки начнут одновременно разряжаться, и ток будет протекать через встроенный диод силового транзистора стабилизатора.
В линейных регуляторах с защитой от обратного тока эта проблема решена. В них внутренний диод отключается, если уровень входного напряжения падает ниже выходного. Если до этого стабилизатор находился в рабочем состоянии, то силовой транзистор отключится не сразу, и некоторое время ток будет течь в обратном направлении. Стоит отметить, что данная функция защищает от протекания тока от выхода ко входу, и не ограничивает входной ток при приложении входного напряжения обратной полярности.
Примером стабилизатора с защитой от обратного тока является MAX8902, который блокирует обратный разрядный ток выходных конденсаторов нагрузки, если вход закорочен на землю.
Заключение
Рассмотренные в статье особенности линейных регуляторов могут оказаться чрезвычайно важными для многих приложений. К сожалению, они редко учитываются в параметрическом поиске. Кроме того, по предоставляемой документации не всегда удается определить, какой набор функций имеет тот или иной стабилизатор. Тем не менее, знание возможных потенциальных проблем делает выбор оптимального регулятора более осознанным.
Оригинал статьи
•••
Наши информационные каналы
Мощный линейный стабилизатор напряжения
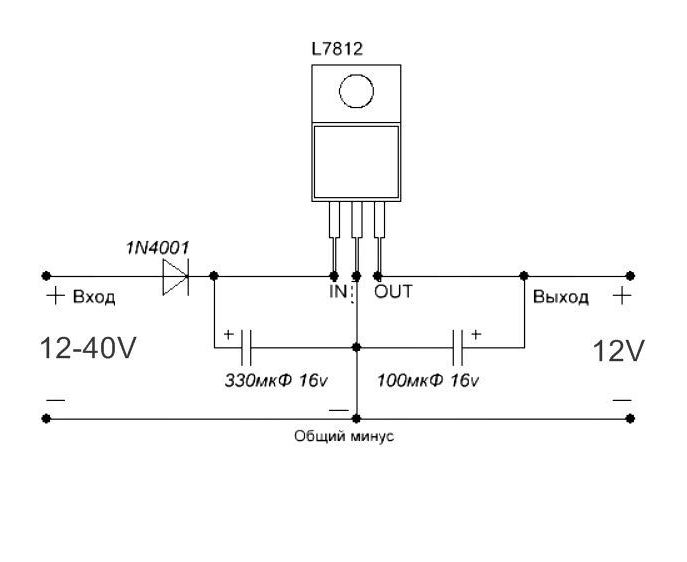
Для питания различных электронных устройств и схем, сделанных своими руками нужен такой источник питания, напряжение на выходе которого можно регулировать в широких пределах. С его помощью можно наблюдать, как ведёт себя схема при том или ином напряжении питания. При этом он должен иметь возможность выдавать большой ток, чтобы питать мощную нагрузку, и минимальные пульсации на выходе. На роль такого источника питания отлично подойдёт линейный стабилизатор напряжения – микросхема LM338, она обеспечивает ток до 5 А, имеет защиту от перегрева и короткого замыкания на выходе. Схема её включения достаточно проста, она представлена ниже.
Схема
Микросхема LM338 имеет три вывода – вход (in), выход (out) и регулирующий (adj). На вход подаём постоянное напряжение определённой величины, а с выхода снимаем стабилизированное напряжение, величина которого задаётся переменным резистором Р2. Напряжение на выходе регулируется от 1,25 вольт до величины входного, с вычетом 1,5 вольт. Проще говоря, если на входе, например, 24 вольта, то на выходе напряжение будет меняться в пределах от 1,25 до 22,5 вольт. Подавать на вход более 30 вольт не следует, микросхема может уйти в защиту. Чем больше ёмкость конденсаторов на входе, тем лучше, ведь они сглаживают пульсации. Ёмкость конденсаторов на выходе микросхемы должна быть небольшой, иначе они будут долго сохранять заряд и напряжение на выходе будет регулироваться неверно. При этом каждый электролитический конденсатор должен быть зашунтирован плёночным или керамическим с малой ёмкостью (на схеме это С2 и С4). При использовании схемы с большими токами микросхему обязательно нужно установить на радиатор, ведь она будет рассеивать на себе всё падение напряжения. Если токи небольшие – до 100 мА, радиатор не потребуется.
Сборка стабилизатора
Вся схема собирается на небольшой печатной плате размерами 35 х 20 мм, изготовить которую можно методом ЛУТ. Печатная плата полностью готова к печати, отзеркаливать её не нужно. Ниже представлены несколько фотографий процесса.
Дорожки желательно залудить, это уменьшит их сопротивление и защитит от окисления. Когда печатная плата готова – начинаем запаивать детали. Микросхема запаиваться прямо на плату, спинкой в сторону края. Такое расположение позволяет закрепить на радиаторе всю плату с микросхемой. Переменный резистор выводится от платы на двух проводках. Можно использовать любой переменный резистор с линейной характеристикой. При этом средний его вывод соединяется с любым из крайних, полученные два контакта идут на плату, как видно на фото. Для подключения проводов входа и выхода удобнее всего использовать клеммник. После сборки необходимо проверить правильность монтажа.
Запуск и испытания
Когда плата собрана, можно переходить к испытаниям. Подключаем на выход маломощную нагрузку, например, светодиод с резистором и вольтметр для контроля напряжения. Подаём напряжение на вход и следим за показаниями вольтметра, напряжение должно меняться при вращении ручки от минимума до максимума. Светодиод при этом будет менять яркость. Если напряжение регулируется, значит схема собрана правильно, можно ставить микросхему на радиатор и тестировать с более мощной нагрузкой. Такой регулируемый стабилизатор идеально подойдёт для использовании в качестве лабораторного блока питания. Особое внимание стоит уделить выбору микросхемы, ведь её очень часто подделывают. Поддельные микросхемы стоят дёшево, но легко сгорают при токе уже 1 – 1,5 Ампера. Оригинальные стоят дороже, но зато честно обеспечивают заявленный ток до 5 Ампер. Удачной сборки.
Смотрите видео
На видео наглядно показана работа стабилизатора. При вращении переменного резистора напряжение плавно меняется от минимума к максимуму и наоборот, светодиод при этом меняет яркость.
Введение в теорию линейных стабилизаторов
Линейный стабилизатор является исходной формой стабилизирующих источников питания. Для понижения уровня входного напряжения до стабилизированного выходного в нем используется переменная проводимость активного электронного элемента. При этом линейный стабилизатор теряет много энергии в виде тепла и потому нагревается.
Линейные источники питания занимают значительную нишу в приложениях, где невысокий КПД таких источников не играет особой роли. К таким приложениям относится стационарное наземное оборудование, для которого принудительное воздушное охлаждение — не проблема. Сюда же относятся приборы, в которых измеритель настолько чувствителен к электрическому шуму, что требует электрически «тихого» источника питания. Среди таких приборов можно назвать аудио- и видеоусилители, радиоприемники и т.п. Линейные стабилизаторы популярны также в качестве локальных, встроенных в плату стабилизаторов. В данном случае плате требуется лишь несколько ватт, поэтому еще несколько ватт, ушедших в тепло, могут быть нейтрализованы с помощью простого радиатора. Если требуется диэлектрическая изоляция от входного источника переменного тока, то она обеспечивается трансформатором переменного тока или магистральной системой электроснабжения.
Обычно линейные стабилизаторы особенно полезны для приложений источников питания, требующих не более 10 Вт выходной мощности. При выходной мощности более 10 Вт обязательный теплоотвод становится столь громоздким и дорогостоящим, что более привлекательными становятся импульсные источники питания.
Принцип работы линейного стабилизатора
Все источники питания — будь то линейные или более сложные импульсные — работают по одному и тому же базовому принципу. Все источники питания имеют в своей основе замкнутый контур отрицательной обратной связи. Единственное назначение этого контура — удерживать постоянное значение выходного напряжения. На рис. 2.1 показаны главные составляющие последовательного линейного стабилизатора.
Рис. 2.1. Базовый линейный стабилизатор
Линейные стабилизаторы бывают только понижающими. Это означает, что входное напряжение источника должно быть выше, чем требуемое выходное напряжение. Существует два типа линейных стабилизаторов: параллельные (shunt) и последовательные (series-pass). Параллельный стабилизатор (стабилизатор с параллельным включением регулирующего элемента) — это стабилизатор напряжения, подключенный параллельно нагрузке. Источник нерегулируемого тока соединен с источником более высокого напряжения, параллельный стабилизатор принимает выходной ток для поддержания постоянного напряжения на нагрузке с учетом переменного входного напряжения и тока нагрузки. Распространенным примером такого стабилизатора является стабилизатор на стабилитроне. Последовательный линейный стабилизатор более эффективен, чем параллельный, и в качестве последовательно включенного регулирующего элемента использует активный полупроводник между входным источником и нагрузкой.
Последовательно включенный проходной элемент работает в линейном режиме. Это означает, что он не проектировался для работы в полностью включенном (ON) или полностью выключенном (OFF) режиме, а работает в «частично включенном» режиме. Контур отрицательной обратной связи определяет степень электропроводности, которую должен принимать проходной элемент для обеспечения требуемого уровня выходного напряжения.
Основой контура отрицательной обратной связи является операционный усилитель с большим коэффициентом усиления, называемый усилителем напряжения ошибки. Его назначение— постоянно сравнивать разницу между высокостабильным опорным напряжением и выходным напряжением. Если эта разница составляет хотя бы милливольты, то выполняется корректировка электропроводности проходного элемента. Стабильное опорное напряжение подается на неинверсный вход операционного усилителя и обычно ниже, чем выходное напряжение. Выходное напряжение делится до уровня опорного и подается на инверсный вход операционного усилителя. Таким образом, при номинальном выходном напряжении центральная точка делителя выходного напряжения идентична опорному напряжению.
Усиление усилителя отклонения обеспечивает напряжение, соответствующее сильно увеличенной разнице между опорным и выходным напряжениями (напряжение ошибки). Напряжение ошибки непосредственно управляет электропроводностью проходного элемента, поддерживая тем самым номинальное выходное напряжение. С увеличением нагрузки выходное напряжение падает, что приводит к повышению выходной мощности усилителя, а это обеспечивает больший ток к нагрузке. Аналогично, при уменьшении нагрузки выходное напряжение будет расти, на что усилитель ошибки ответит снижением тока через проходной элемент на нагрузку.
Скорость, с которой усилитель ошибки отвечает на любые изменения на выходе, и насколько точно поддерживается требуемый уровень выходного напряжения, зависит от компенсации контура обратной связи усилителя ошибки. Компенсация обратной связи управляется размещением элементов внутри делителя напряжения и между отрицательным входом и выходом усилителя ошибки. Его конструкция диктует, насколько выполняется усиление при постоянном токе, что, в свою очередь, определяет точность выходного напряжения. Он также определяет степень усиления при повышенной частоте и полосе пропускания, что в свою очередь определяет время, затрачиваемое на реакцию на изменения выходной нагрузки, или продолжительность переходных процессов.
Как видите, принцип действия линейного стабилизатора очень прост. Точно такая же цепь присутствует во всех стабилизаторах, включая более сложные импульсные стабилизаторы. Контур обратной связи по напряжению выполняет конечную функцию источника питания: поддерживает уровень выходного напряжения.
AN-140: Основные понятия линейного регулятора и импульсных источников питания
Аннотация
В этой статье объясняются основные концепции линейных регуляторов и импульсных источников питания (ИИП). Он предназначен для системных инженеров, которые могут не очень хорошо разбираться в конструкции и выборе источников питания. Объясняются основные принципы работы линейных регуляторов и SMPS, а также обсуждаются преимущества и недостатки каждого решения. Понижающий понижающий преобразователь используется в качестве примера для дальнейшего объяснения конструктивных особенностей импульсного регулятора.
Введение
Современные конструкции требуют все большего количества шин питания и решений питания в электронных системах с нагрузками от нескольких мА для резервных источников питания до более 100 А для стабилизаторов напряжения ASIC. Важно выбрать подходящее решение для целевого приложения и удовлетворить заданные требования к производительности, такие как высокая эффективность, ограниченное пространство на печатной плате, точное регулирование мощности, быстрая переходная характеристика, низкая стоимость решения и т. Д.Проектирование управления питанием становится все более частой и сложной задачей для проектировщиков систем, многие из которых могут не иметь серьезного опыта в области питания.
Преобразователь мощности генерирует выходное напряжение и ток для нагрузки от заданного источника входного питания. Он должен соответствовать требованиям регулирования напряжения или тока нагрузки в установившихся и переходных режимах. Он также должен защищать нагрузку и систему в случае отказа компонента. В зависимости от конкретного применения разработчик может выбрать либо линейный регулятор (LR), либо импульсный источник питания (SMPS).Чтобы сделать лучший выбор решения, проектировщикам важно знать достоинства, недостатки и конструктивные особенности каждого подхода.
Эта статья посвящена приложениям с неизолированными источниками питания и дает представление об их работе и основах проектирования.
Линейные регуляторы
Как работает линейный регулятор
Начнем с простого примера. Во встроенной системе от внешнего источника питания доступна шина 12 В. На системной плате 3.Напряжение 3 В необходимо для питания операционного усилителя (ОУ). Самый простой способ генерировать 3,3 В — использовать резисторный делитель от шины 12 В, как показано на рисунке 1. Хорошо ли он работает? Обычно ответ отрицательный. Ток на выводе V CC операционного усилителя может изменяться в зависимости от условий эксплуатации. Если используется делитель с постоянным резистором, напряжение IC V CC зависит от нагрузки. Кроме того, вход шины 12 В может плохо регулироваться. В той же системе может быть много других нагрузок, использующих шину 12 В.Из-за импеданса шины напряжение на шине 12 В меняется в зависимости от условий загрузки шины. В результате резистивный делитель не может подавать стабилизированное напряжение 3,3 В на операционный усилитель, чтобы гарантировать его правильную работу. Следовательно, необходим специальный контур регулирования напряжения. Как показано на рисунке 2, контур обратной связи должен регулировать значение верхнего резистора R1 для динамического регулирования напряжения 3,3 В на V CC .
Рисунок 1. Резисторный делитель генерирует 3,3 В DC от входа шины 12 В
Рисунок 2.Контур обратной связи регулирует значение последовательного резистора R1 для регулирования 3,3 В
Этот вид переменного резистора может быть реализован с помощью линейного регулятора, как показано на рисунке 3. Линейный регулятор работает с биполярным или полевым силовым транзистором (FET) в его линейном режиме. Таким образом, транзистор работает как переменный резистор последовательно с выходной нагрузкой. Концептуально для создания контура обратной связи усилитель ошибки измеряет выходное напряжение постоянного тока через цепь резисторов выборки R A и R B , затем сравнивает напряжение обратной связи V FB с опорным напряжением V REF .Выходное напряжение усилителя ошибки управляет базой последовательного силового транзистора через усилитель тока. Когда либо входное напряжение V BUS уменьшается, либо увеличивается ток нагрузки, выходное напряжение V CC падает. Напряжение обратной связи V FB также уменьшается. В результате усилитель ошибки обратной связи и усилитель тока генерируют больший ток в базе транзистора Q1. Это уменьшает падение напряжения V CE и, следовательно, возвращает выходное напряжение V CC , так что V FB равно V REF .С другой стороны, если выходное напряжение V CC повышается, аналогичным образом цепь отрицательной обратной связи увеличивает V CE , чтобы обеспечить точное регулирование выхода 3,3 В. Таким образом, любое изменение V O поглощается напряжением V CE транзистора линейного стабилизатора. Таким образом, выходное напряжение V CC всегда постоянно и хорошо регулируется.
Рис. 3. В линейном регуляторе реализован переменный резистор для регулирования выходного напряжения
Зачем нужны линейные регуляторы?
Линейный регулятор уже очень давно широко используется в промышленности.Он был основой для отрасли электроснабжения до тех пор, пока импульсные источники питания не стали преобладающими после 1960-х годов. Даже сегодня линейные регуляторы все еще широко используются в широком спектре приложений.
Помимо простоты использования, линейные регуляторы имеют и другие преимущества в производительности. Поставщики систем управления питанием разработали множество интегрированных линейных регуляторов. Типичный интегрированный линейный регулятор требует только V IN , V OUT , FB и дополнительные контакты GND. На рисунке 4 показан типичный трехконтактный линейный стабилизатор LT1083, разработанный более 20 лет назад.Для установки выходного напряжения требуется только входной конденсатор, выходной конденсатор и два резистора обратной связи. Практически любой инженер-электрик может спроектировать источник питания с этими простыми линейными регуляторами.
Рис. 4. Пример интегрированного линейного регулятора: линейный регулятор 7,5 А только с тремя контактами
Один недостаток — линейный регулятор может сжечь много энергии
Основным недостатком использования линейных регуляторов может быть чрезмерное рассеивание мощности последовательного транзистора Q1, работающего в линейном режиме.Как объяснялось ранее, транзистор линейного регулятора концептуально представляет собой переменный резистор. Поскольку весь ток нагрузки должен проходить через последовательный транзистор, его рассеиваемая мощность составляет P Loss = (V IN — V O ) • I O . В этом случае эффективность линейного регулятора можно быстро оценить по:
Итак, в примере на Рисунке 1, когда на входе 12 В и на выходе 3,3 В, эффективность линейного регулятора составляет всего 27,5%. В этом случае 72,5% входной мощности просто тратится впустую и выделяет тепло в регуляторе.Это означает, что транзистор должен иметь тепловую способность, чтобы справиться с рассеянием мощности / тепла в худшем случае при максимальном напряжении IN и полной нагрузке. Таким образом, размер линейного регулятора и его радиатора могут быть большими, особенно когда V O намного меньше, чем V IN . На рисунке 5 показано, что максимальная эффективность линейного регулятора пропорциональна соотношению V O / V IN .
Рисунок 5. Максимальный КПД линейного регулятора в зависимости от соотношения V O / V IN
С другой стороны, линейный регулятор может быть очень эффективным, если V O близко к V IN .Однако линейный регулятор (LR) имеет другое ограничение, а именно минимальную разницу напряжений между V IN и V O . Транзистор в LR должен работать в линейном режиме. Таким образом, требуется определенное минимальное падение напряжения на коллекторе до эмиттера биполярного транзистора или от стока до истока полевого транзистора. Когда V O слишком близко к V IN , LR может больше не регулировать выходное напряжение. Линейные регуляторы, которые могут работать с малой высотой потолка (V IN — V O ), называются регуляторами с малым падением напряжения (LDO).
Также ясно, что линейный стабилизатор или LDO может обеспечить только понижающее преобразование DC / DC. В приложениях, которые требуют, чтобы напряжение V O было выше, чем напряжение V IN , или требуется отрицательное напряжение V O от положительного напряжения V IN , линейные регуляторы, очевидно, не работают.
Линейный регулятор с разделением тока для высокой мощности [8]
Для приложений, требующих большей мощности, регулятор должен быть установлен отдельно на радиаторе, чтобы отводить тепло.В системах, предназначенных только для поверхностного монтажа, это не вариант, поэтому ограничение рассеиваемой мощности (например, 1 Вт) ограничивает выходной ток. К сожалению, непросто установить прямое параллельное соединение линейных регуляторов для распределения выделяемого тепла.
Замена опорного напряжения, показанного на рисунке 3 с источником тока точности, позволяет линейный регулятор, чтобы быть непосредственно подключены параллельно для распространения тока нагрузки и, таким образом, тепло рассеивается спрэд между ИС. Это делает возможным использование линейных регуляторов при высоком выходном токе, в приложениях, предназначенных для поверхностного монтажа, где только ограниченное количество тепла может рассеиваться в любом месте на плате.LT3080 — первый регулируемый линейный стабилизатор, который можно использовать параллельно для увеличения тока. Как показано на рисунке 6, он имеет внутренний источник тока с прецизионным нулевым TC 10 мкА, подключенный к неинвертирующему входу операционного усилителя. С помощью внешнего резистора настройки одиночного напряжения R SET выходное напряжение линейного регулятора можно регулировать от 0 В до (V IN — V DROPOUT ).
Рис. 6. Настройка одиночного резистора LDO LT3080 с прецизионным источником тока Ссылка
На рис. 7 показано, насколько легко подключить LT3080 к параллельному току.Просто связать SET штифты LT3080s вместе, два регулятора один и то же опорное напряжение. Поскольку операционные усилители точно настроены, напряжение смещения между регулировочным штифтом и выходом составляет менее 2 мВ. В этом случае требуется только балластное сопротивление 10 мОм, которое может быть суммой небольшого внешнего резистора и сопротивления проводов печатной платы, чтобы сбалансировать ток нагрузки с более чем 80% выравниваемым распределением. Нужна еще больше мощности? Разумно даже параллельное соединение от 5 до 10 устройств.
Рисунок 7. Параллельное подключение двух линейных регуляторов LT3080 для увеличения выходного тока
Области применения, где предпочтительны линейные регуляторы
Существует множество приложений, в которых линейные регуляторы или LDO обеспечивают превосходные решения для переключения источников питания, в том числе:
- Простые / недорогие решения. Решения с линейным стабилизатором или LDO просты и удобны в использовании, особенно для маломощных приложений с низким выходным током, где термическое напряжение не критично.Внешний силовой индуктор не требуется.
- Применения с низким уровнем шума / малой пульсации. Для чувствительных к шуму приложений, таких как устройства связи и радио, минимизация шума источника питания очень важна. Линейные регуляторы имеют очень низкую пульсацию выходного напряжения, потому что нет элементов, которые часто включаются и выключаются, а линейные регуляторы могут иметь очень широкую полосу пропускания. Так что есть небольшая проблема с EMI. Некоторые специальные LDO-стабилизаторы, такие как семейство LDO Analog Devices LT1761, имеют на выходе напряжение шума всего 20 мкВ RMS .Для SMPS практически невозможно достичь такого низкого уровня шума. SMPS обычно имеет выходную пульсацию в мВ даже с конденсаторами с очень низким ESR.
- Приложения с быстрым переходным процессом. Контур обратной связи линейного регулятора обычно является внутренним, поэтому никакой внешней компенсации не требуется. Как правило, линейные регуляторы имеют более широкую полосу пропускания контура управления и более быстрый переходный отклик, чем у SMPS.
- Приложения с низким отсевом. Для приложений, где выходное напряжение близко к входному, LDO могут быть более эффективными, чем SMPS.Существуют LDO с очень низким падением напряжения (VLDO), такие как Analog Devices LTC1844, LT3020 и LTC3025, с выпадающим напряжением от 20 до 90 мВ и током до 150 мА. Минимальное входное напряжение может составлять 0,9 В. Поскольку в LR нет потерь переключения переменного тока, эффективность малой нагрузки LR или LDO аналогична его эффективности при полной нагрузке. SMPS обычно имеет более низкую эффективность при легкой нагрузке из-за потерь на переключение переменного тока. В приложениях с батарейным питанием, в которых эффективность малой нагрузки также важна, LDO может обеспечить лучшее решение, чем SMPS.
Таким образом, разработчики используют линейные регуляторы или LDO, потому что они просты, имеют низкий уровень шума, низкую стоимость, просты в использовании и обеспечивают быстрый переходный отклик. Если V O близко к V IN , LDO может быть более эффективным, чем SMPS.
Основы импульсного источника питания
Зачем нужен импульсный источник питания?
Быстрый ответ — высокая эффективность. В SMPS транзисторы работают в режиме переключения, а не в линейном режиме. Это означает, что когда транзистор включен и проводит ток, падение напряжения на его пути питания минимально.Когда транзистор выключен и блокирует высокое напряжение, в его пути питания почти нет тока. Итак, полупроводниковый транзистор похож на идеальный переключатель. Таким образом, потери мощности в транзисторе сводятся к минимуму. Высокая эффективность, низкое рассеивание мощности и высокая плотность мощности (небольшой размер) являются основными причинами, по которым разработчики используют SMPS вместо линейных регуляторов или LDO, особенно в сильноточных приложениях. Например, в настоящее время синхронный понижающий понижающий источник питания 12 В IN , 3,3 В OUT в режиме переключения обычно может достигать КПД> 90% против менее 27.5% от линейного регулятора. Это означает потерю мощности или уменьшение размеров как минимум в восемь раз.
Самый популярный импульсный блок питания — понижающий преобразователь
На рис. 8 показан простейший и наиболее популярный импульсный стабилизатор — понижающий преобразователь постоянного тока в постоянный. Он имеет два режима работы, в зависимости от того, включен или выключен транзистор Q1. Чтобы упростить обсуждение, все силовые устройства считаются идеальными. Когда переключатель (транзистор) Q1 включен, напряжение коммутационного узла V SW = V IN и ток L индуктора заряжается на (V IN — V O ).На рисунке 8 (а) показана эквивалентная схема в этом режиме зарядки индуктора. Когда переключатель Q1 выключен, ток индуктора проходит через диод свободного хода D1, как показано на Рисунке 8 (b). Напряжение коммутационного узла V SW = 0 В и ток L индуктора разряжается нагрузкой V O . Поскольку идеальная катушка индуктивности не может иметь постоянного напряжения в установившемся состоянии, среднее выходное напряжение V O может быть задано как:
, где T ON — временной интервал включения в пределах периода TS переключения.Если соотношение T ON / T S определяется как рабочий цикл D, выходное напряжение V O составляет:
Когда значения катушки индуктивности L фильтра и выходного конденсатора C O достаточно высоки, выходное напряжение V O представляет собой постоянное напряжение с пульсацией только в мВ. В этом случае для входного понижающего источника 12 В концептуально рабочий цикл 27,5% обеспечивает выходное напряжение 3,3 В.
Рисунок 8. Рабочие режимы понижающего преобразователя и типичные формы сигналов
Помимо описанного выше подхода к усреднению, существует другой способ вывести уравнение рабочего цикла.Идеальный индуктор не может иметь постоянное напряжение в устойчивом состоянии. Таким образом, он должен поддерживать вольт-секундный баланс катушки индуктивности в течение периода переключения. Согласно форме кривой напряжения на катушке индуктивности на рисунке 8 для баланса вольт-секунд требуется:
Уравнение (5) совпадает с уравнением (3). Такой же подход баланса вольт-секунда может использоваться для других топологий постоянного / постоянного тока для получения рабочего цикла по уравнениям V IN и V O .
Потери мощности в понижающем преобразователе
Потери проводимости постоянного тока
С идеальными компонентами (нулевое падение напряжения во включенном состоянии и нулевые потери при переключении) идеальный понижающий преобразователь имеет 100% КПД.На самом деле рассеивание мощности всегда связано с каждым силовым компонентом. В ИИП есть два типа потерь: потери проводимости постоянного тока и потери переключения переменного тока.
Потери проводимости понижающего преобразователя в основном возникают из-за падений напряжения на транзисторе Q1, диоде D1 и катушке индуктивности L, когда они проводят ток. Чтобы упростить обсуждение, в следующем расчете потерь проводимости не учитываются пульсации переменного тока тока индуктора. Если MOSFET используется в качестве силового транзистора, потери проводимости MOSFET равны I O 2 • R DS (ON) • D, где R DS (ON) — сопротивление MOSFET в открытом состоянии. Q1.Потери мощности проводимости диода равны I O • V D • (1 — D), где V D — прямое падение напряжения на диоде D1. Потери проводимости индуктора равны I O 2 • R DCR , где R DCR — сопротивление меди обмотки индуктора. Следовательно, потери проводимости понижающего преобразователя примерно равны:
Например, вход 12 В, 3,3 В / 10 А MAX выходной понижающий источник питания может использовать следующие компоненты: полевой МОП-транзистор R DS (ВКЛ.) = 10 мОм, индуктор R DCR = 2 мОм, прямое напряжение диода В D = 0.5В. Следовательно, потеря проводимости при полной нагрузке составляет:
Учитывая только потери проводимости, КПД преобразователя составляет:
Приведенный выше анализ показывает, что диод свободного хода потребляет 3,62 Вт потерь мощности, что намного выше, чем потери проводимости полевого МОП-транзистора Q1 и катушки индуктивности L. Для дальнейшего повышения эффективности диод D1 можно заменить на полевой МОП-транзистор Q2, как показано на Рисунок 9. Этот преобразователь называется синхронным понижающим преобразователем. Строб Q2 требует сигналов, дополнительных к затвору Q1, т.е.е., Q2 горит только тогда, когда Q1 выключен. Потери проводимости синхронного понижающего преобразователя:
Если полевой МОП-транзистор R DS (ON) 10 мОм также используется для Q2, потери проводимости и эффективность синхронного понижающего преобразователя будут:
Приведенный выше пример показывает, что синхронный понижающий преобразователь более эффективен, чем обычный понижающий преобразователь, особенно для приложений с низким выходным напряжением, где рабочий цикл мал, а время проводимости диода D1 велико.
Рисунок 9.Синхронный понижающий преобразователь и его транзисторные сигналы затвора
Потери при переключении переменного тока
В дополнение к потерям проводимости постоянного тока существуют другие потери мощности, связанные с переменным током / переключением, из-за неидеальных силовых компонентов:
- Коммутационные потери MOSFET. Настоящему транзистору требуется время для включения или выключения. Таким образом, во время переходных процессов при включении и выключении происходит перекрытие напряжения и тока, что приводит к потерям при переключении переменного тока. На рисунке 10 показаны типичные формы сигналов переключения полевого МОП-транзистора Q1 в синхронном понижающем преобразователе.Зарядка и разрядка паразитного конденсатора C GD верхнего полевого транзистора Q1 с зарядом Q GD определяют большую часть времени переключения Q1 и связанных потерь. В синхронном понижающем преобразователе потери переключения нижнего полевого транзистора Q2 малы, потому что Q2 всегда включается после того, как его основной диод проводит ток, и выключается до того, как его основной диод проводит ток, в то время как падение напряжения на основном диоде невелико. Однако заряд обратного восстановления основного диода Q2 может также увеличить коммутационные потери верхнего полевого транзистора Q1 и может вызвать звон напряжения переключения и шум электромагнитных помех.Уравнение (12) показывает, что потери переключения управляющего полевого транзистора Q1 пропорциональны частоте переключения преобразователя f S . Точный расчет потерь энергии E ON и E OFF для Q1 непрост, но его можно найти в примечаниях к применению поставщиков MOSFET.
- Потери в сердечнике индуктора P SW_CORE . Настоящая катушка индуктивности также имеет потери переменного тока, которые зависят от частоты коммутации. Потери переменного тока в индукторе в основном связаны с потерями в магнитном сердечнике. В высокочастотном ИИП материалом сердечника может быть железный порошок или феррит.Обычно сердечники из порошкового железа насыщаются мягко, но имеют высокие потери в сердечнике, тогда как ферритовый материал насыщается более резко, но имеет меньшие потери в сердечнике. Ферриты — это керамические ферромагнитные материалы, которые имеют кристаллическую структуру, состоящую из смесей оксида железа с оксидом марганца или цинка. Потери в сердечнике в основном связаны с потерями на магнитный гистерезис. Производитель сердечника или катушки индуктивности обычно предоставляет данные о потерях в сердечнике разработчикам источников питания для оценки потерь в катушке индуктивности переменного тока.
- Прочие потери, связанные с переменным током.Другие потери, связанные с переменным током, включают потери драйвера затвора P SW_GATE , что равно V DRV • Q G • f S , и мертвое время (когда оба верхнего полевого транзистора Q1 и нижний полевой транзистор Q2 выключены) основной диод потеря проводимости, которая равна (ΔT ON + ΔT OFF ) • V D (Q2) • f S . Таким образом, потери, связанные с переключением, включают: Расчет потерь, связанных с переключением, обычно непросто. Потери, связанные с переключением, пропорциональны частоте переключения f S .В синхронном понижающем преобразователе 12 В IN , 3,3 В O / 10A MAX потери переменного тока приводят к потере эффективности от 2% до 5% при частоте переключения 200–500 кГц. Таким образом, общий КПД составляет около 93% при полной нагрузке, что намного лучше, чем у источников LR или LDO. Нагревание или уменьшение размера могут быть близки к 10x.
Рис. 10. Типичная форма сигнала переключения и потери в верхнем полевом транзисторе Q1 понижающего преобразователя
Конструктивные особенности компонентов коммутируемой мощности
Оптимизация частоты коммутации
Как правило, более высокая частота переключения означает меньшие размеры компонентов выходного фильтра L и C O .В результате можно уменьшить размер и стоимость блока питания. Более широкая полоса пропускания также может улучшить переходные характеристики нагрузки. Однако более высокая частота переключения также означает более высокие потери мощности, связанные с переменным током, что требует большего пространства на плате или радиатора для ограничения теплового напряжения. В настоящее время для приложений с выходным током ≥10A большинство понижающих источников работают в диапазоне от 100 кГц до 1 МГц ~ 2 МГц. При токе нагрузки <10А частота переключения может достигать нескольких МГц. Оптимальная частота для каждой конструкции является результатом тщательного выбора размера, стоимости, эффективности и других рабочих параметров.
Выбор выходного индуктора
В синхронном понижающем преобразователе пиковый ток пульсации катушки индуктивности можно рассчитать как:
При заданной частоте коммутации низкая индуктивность дает большие пульсации тока и приводит к большим пульсациям выходного напряжения. Большой ток пульсации также увеличивает среднеквадратичный ток полевого МОП-транзистора и потери проводимости. С другой стороны, высокая индуктивность означает большой размер индуктора и возможные высокие DCR индуктивности и потери проводимости. Как правило, при выборе катушки индуктивности выбирается 10% ~ 60% пульсаций размаха пульсаций по отношению к максимальному коэффициенту постоянного тока.Поставщики индукторов обычно указывают номинальные значения DCR, RMS (нагрева) и тока насыщения. Важно рассчитать максимальный постоянный ток и пиковый ток катушки индуктивности в пределах максимальных номиналов производителя.
Выбор силового полевого МОП-транзистора
При выборе полевого МОП-транзистора для понижающего преобразователя сначала убедитесь, что его максимальное значение V DS выше, чем напряжение питания V IN (MAX) с достаточным запасом. Однако не выбирайте полевой транзистор со слишком высоким номинальным напряжением.Например, для источника питания IN (MAX) 16 В хорошо подойдет полевой транзистор с номинальным напряжением 25 или 30 В. Полевой транзистор с номинальным напряжением 60 В может быть чрезмерным, поскольку сопротивление полевого транзистора в открытом состоянии обычно увеличивается с увеличением номинального напряжения. Далее, два наиболее важных параметра — это сопротивление полевого транзистора R DS (ON) в открытом состоянии и заряд затвора Q G (или Q GD ). Обычно существует компромисс между зарядом затвора Q G и сопротивлением в открытом состоянии R DS (ON) . Как правило, полевой транзистор с малым кремниевым кристаллом имеет низкий Q G , но высокое сопротивление в открытом состоянии R DS (ON) , тогда как полевой транзистор с большим кремниевым кристаллом имеет низкий R DS (ON) , но большой Q . G .В понижающем преобразователе верхний полевой МОП-транзистор Q1 принимает как потери проводимости, так и потери переключения переменного тока. Для Q1 обычно требуется полевой транзистор Q G FET, особенно в приложениях с низким выходным напряжением и небольшим рабочим циклом. Синхронный полевой транзистор Q2 с нижней стороны имеет небольшие потери переменного тока, поскольку он обычно включается или выключается, когда его напряжение V DS близко к нулю. В этом случае низкий R DS (ON) более важен, чем Q G для синхронного полевого транзистора Q2. Когда один полевой транзистор не может справиться с полной мощностью, несколько полевых МОП-транзисторов могут использоваться параллельно.
Выбор входного и выходного конденсатора
Во-первых, следует выбирать конденсаторы с достаточным снижением номинального напряжения.
Входной конденсатор понижающего преобразователя имеет пульсирующий ток переключения с большой пульсацией. Следовательно, входной конденсатор следует выбирать с достаточным среднеквадратичным значением пульсационного тока, чтобы обеспечить его срок службы. Обычно на входе параллельно используются алюминиевые электролитические конденсаторы и керамические конденсаторы с низким ESR.
Выходной конденсатор определяет не только пульсации выходного напряжения, но и характеристики переходных процессов нагрузки.Пульсации выходного напряжения можно рассчитать по уравнению (15). Для высокопроизводительных приложений важны как ESR, так и общая емкость, чтобы минимизировать пульсации выходного напряжения и оптимизировать переходные характеристики нагрузки. Обычно хорошим выбором являются танталовые конденсаторы с низким ESR, полимерные конденсаторы с низким ESR и многослойные керамические конденсаторы (MLCC).
Замкнуть контур регулирования обратной связи
Существует еще один важный этап проектирования импульсного источника питания — замыкание регулирующего контура с помощью схемы управления с отрицательной обратной связью.Обычно это гораздо более сложная задача, чем использование LR или LDO. Это требует хорошего понимания поведения контура и конструкции компенсации для оптимизации динамических характеристик с помощью стабильного контура.
Малосигнальная модель понижающего преобразователя
Как объяснено выше, переключающий преобразователь меняет свой рабочий режим в зависимости от состояния переключателя ON или OFF. Это дискретная и нелинейная система. Для анализа контура обратной связи с помощью метода линейного управления необходимо линейное моделирование малых сигналов [1] [3].Из-за выходного фильтра L-C линейная передаточная функция малого сигнала от рабочего цикла D до выхода V O фактически является системой второго порядка с двумя полюсами и одним нулем, как показано в уравнении (16). На резонансной частоте выходной катушки индуктивности и конденсатора расположены двойные полюса. Есть ноль, определяемый выходной емкостью и ESR конденсатора.
Управление в режиме напряжения и управление в режиме тока
Выходное напряжение может регулироваться замкнутой системой, показанной на рисунке 11.Например, когда выходное напряжение увеличивается, напряжение V FB обратной связи увеличивается, а выходной сигнал усилителя ошибки отрицательной обратной связи уменьшается. Так рабочий цикл уменьшается. В результате выходное напряжение снижается до V FB = V REF . Схема компенсации ошибок операционного усилителя может быть схемой усилителя с обратной связью типа I, типа II или типа III [3] [4]. Есть только один контур управления для регулирования выхода. Эта схема называется контролем режима напряжения.Analog Devices LTC3775 и LTC3861 — типичные понижающие контроллеры в режиме напряжения.
Рис. 11. Блок-схема понижающего преобразователя с управлением по напряжению
На рис. 12 показан синхронный понижающий источник питания от 5 до 26 В на входе и на выходе 1,2 В / 15 А с использованием понижающего контроллера режима напряжения LTC3775. Благодаря передовой архитектуре ШИМ-модуляции LTC3775 и очень низкому (30 нс) минимальному времени включения источник питания хорошо работает для приложений, которые преобразуют высоковольтный автомобильный или промышленный источник питания до уровня 1.Низкое напряжение 2 В, необходимое для современных микропроцессоров и программируемых логических микросхем. Для приложений высокой мощности требуются многофазные понижающие преобразователи с разделением тока. При управлении в режиме напряжения требуется дополнительная петля распределения тока для балансировки тока между параллельными понижающими каналами. Типичным методом разделения тока для управления режимом напряжения является метод ведущего ведомого. LTC3861 является таким контроллером режима напряжения PolyPhase ® . Его очень низкое (± 1,25 мВ) смещение считывания тока делает разделение тока между параллельно включенными фазами очень точным, чтобы сбалансировать тепловую нагрузку.[10]
Рис. 12. Синхронный понижающий блок питания LTC3775 в режиме напряжения обеспечивает высокий коэффициент понижения
Управление в режиме тока использует два контура обратной связи: внешний контур напряжения, аналогичный контуру управления преобразователей, управляемых в режиме напряжения, и внутренний контур тока, который возвращает сигнал тока в контур управления. На рисунке 13 показана концептуальная блок-схема понижающего преобразователя с управлением в режиме пикового тока, который непосредственно измеряет выходной ток индуктора. В режиме управления по току ток катушки индуктивности определяется ошибочным выходным напряжением операционного усилителя.Катушка индуктивности становится источником тока. Следовательно, передаточная функция от выхода операционного усилителя V C к выходному напряжению V O становится однополюсной системой. Это значительно упрощает компенсацию петли. Компенсация контура управления в меньшей степени зависит от нуля ESR выходного конденсатора, поэтому можно использовать все керамические выходные конденсаторы.
Рис. 13. Блок-схема понижающего преобразователя с управлением по току
Есть много других преимуществ от текущего управления режимом.Как показано на Рисунке 13, поскольку пиковый ток индуктора ограничивается операционным усилителем V C по циклу, система с контролем режима тока обеспечивает более точное и быстрое ограничение тока в условиях перегрузки. Пусковой ток индуктора также хорошо контролируется во время запуска. Кроме того, ток катушки индуктивности не изменяется быстро при изменении входного напряжения, поэтому источник питания имеет хорошие характеристики переходных процессов в линии. Когда несколько преобразователей подключены параллельно, с контролем режима тока, также очень легко распределять ток между источниками, что важно для надежных приложений с высоким током, использующих понижающие преобразователи PolyPhase.В общем, преобразователь, управляемый режимом тока, более надежен, чем преобразователь, управляемый режимом напряжения.
Решение схемы управления текущим режимом должно точно определять ток. Сигнал измерения тока обычно представляет собой слабый сигнал с уровнем в несколько десятков милливольт, чувствительный к шуму переключения. Следовательно, необходима правильная и тщательная разводка печатной платы. Токовая петля может быть замкнута путем измерения тока катушки индуктивности через чувствительный резистор, падения напряжения DCR катушки индуктивности или падения напряжения проводимости MOSFET.Типичные контроллеры текущего режима включают в себя Analog Devices LTC3851A, LTC3855, LTC3774 и LTC3875.
Постоянная частота и постоянный контроль времени
Типовые схемы режима напряжения и режима тока в разделе «Управление в режиме напряжения по сравнению с управлением в режиме тока» имеют постоянную частоту переключения, генерируемую внутренними часами контроллера. Эти контроллеры с постоянной частотой коммутации можно легко синхронизировать, что является важной особенностью понижающих контроллеров PolyPhase с высоким током. Однако, если переходный процесс повышения нагрузки происходит сразу после выключения затвора управляющего полевого транзистора Q1, преобразователь должен ждать все время выключения Q1 до следующего цикла, чтобы отреагировать на переходный процесс.В приложениях с небольшими рабочими циклами задержка в наихудшем случае близка к одному циклу переключения.
В таких приложениях с малым рабочим циклом управление режимом постоянного тока впадины по времени имеет более короткий конец
Базовые знания регулятора напряжения (1/4)
Обзор линейного регулятора CMOS
История линейных стабилизаторов CMOS относительно нова. Они разработали портативные электронные устройства с батарейным питанием. Поскольку процессы CMOS использовались в крупномасштабных интегральных схемах, таких как LSI и микропроцессоры, они постоянно уменьшались.Используя все преимущества технологии миниатюризации, линейные КМОП-регуляторы превратились в ИС управления питанием, которые широко используются в портативной электронике для реализации низкопрофильного, низкого падения напряжения и низкого тока питания.
Чем они отличаются от биполярных линейных регуляторов?
Как правило, линейный стабилизатор CMOS обеспечивает более низкий ток питания по сравнению с биполярным линейным регулятором. Это связано с тем, что биполярный процесс управляется током, а процесс CMOS — напряжением.[См. Рисунок 1]
[Рисунок 1] Устройство, управляемое током и устройство, управляемое напряжением
Транзистор биполярный
Ток проходит между эмиттером и коллектором, когда ток базы включен. Чтобы получить выходной ток, должен быть включен базовый ток.
МОП-транзистор
Ток проходит между истоком и стоком, когда напряжение заряжается на затворе. Когда электрический заряд заряжен, ток для включения не требуется.
Линейные регуляторы, которые не требуют работы часов, особенно подходят для достижения низкого тока питания, поскольку рабочий ток регуляторов может быть почти нулевым в цепях, отличных от аналоговых рабочих цепей.
Примером биполярных линейных регуляторов являются многоцелевые 3-контактные регуляторы серии 78. Поскольку диапазон входного напряжения этой серии достигает 30 В ~ 40 В, а серия может потреблять ток более 1 А, серия используется в различной бытовой технике и промышленном оборудовании.Тем не менее, ряды не имеют низкого отсева, потому что структура вывода ряда — NPN Darlington Output. В таблице 1 приведены некоторые основные характеристики серии.
| Серия продуктов | Максимальный выходной ток |
Номинальное входное напряжение Напряжение |
Рабочий Ток |
Падение напряжения |
|---|---|---|---|---|
| 78xx | 1A | 35 В, 40 В | 4 ~ 8 мА | 2 В при 1 А |
| 78Mxx | 500 мА | 35 В, 40 В | 6 ~ 7 мА | 2 В при 350 мА |
| 78Nxx | 300 мА | 35 В, 40 В | 5 ~ 6 мА | 1.7 В при 200 мА
2 В при 300 мА |
| 78Lxx | 100 мА | 30В, 35В, 40В | 6 ~ 6,5 мА | 1,7 В при 40 мА |
Тем не менее, количество процессов, необходимых для биполярных линейных регуляторов, составляет примерно половину или две трети процесса CMOS, и поэтому биполярный линейный регулятор более рентабелен, чем стабилизатор CMOS, даже если его размер матрицы больше. Таким образом, биполярный линейный регулятор лучше подходит для использования с большим током или высоким напряжением.С другой стороны, технологии миниатюризации КМОП-процесса хорошо разработаны и имеют такие преимущества, как низкое напряжение, малое падение напряжения, небольшой размер и низкое энергопотребление.
Где и как используется CMOS?
Линейные стабилизаторы КМОПшироко используются в портативных электронных устройствах с батарейным питанием из-за их низкого падения напряжения и низких характеристик тока питания. Регуляторы LDO (Low Dropout) позволяют использовать аккумулятор до предела, и поэтому регуляторы теперь являются важными ИС управления питанием для таких устройств, как мобильные телефоны, цифровые камеры и портативные компьютеры, чтобы иметь длительный срок службы батареи.Поскольку стабилизаторы LDO обеспечивают большой ток с малым перепадом входного и выходного напряжения при минимальных тепловых потерях, они могут удовлетворить широкий диапазон требований к току каждого устройства.
Некоторые типы регуляторов с низким потреблением тока используют ток собственного питания менее 1 мкА. Благодаря этой особенности, эти типы регуляторов могут поддерживать ток питания электронных устройств и беспроводных приложений, таких как мобильные телефоны, на максимально низком уровне, когда эти устройства находятся в спящем режиме.Поскольку эти регуляторы также могут обеспечить преимущества технологии миниатюризации КМОП, они открывают большой потенциал для мобильных электронных устройств, которым требуется низкий профиль и высокая точность.
Пакеты
Стандартные пакеты, используемые для линейных стабилизаторов CMOS: SOT-23 и SOT-89. В последнее время также стали доступны сверхмалые пакеты, такие как CSP (пакет масштабирования микросхемы). Поскольку разработка ИС управления питанием обусловлена развитием мобильных устройств, они обычно помещаются в небольшие корпуса для поверхностного монтажа.На рисунке 1 показаны типичные упаковки.
[Рисунок 1] Примеры пакетов регуляторов CMOS
SOT-89: Стандартный комплект мини-пресс-формы
SOT-23: Стандартный пакет мини-пресс-форм
USP-6C: Стандартная упаковка типа USP
USPQ-4B04: Стандартная упаковка типа USP
USP-6B06: Стандартная упаковка типа USP
WLP-5-02: Стандартный пакет типа WLP
Особенности: Что умеет CMOS?
Идея линейных регуляторов в качестве ИС управления питанием заключается в том, что они напрямую подключаются к батарее или адаптеру переменного тока, поэтому вы должны обращать внимание на максимальное входное напряжение.Правила проектирования ИС для процессов CMOS меняются в зависимости от максимального входного напряжения, а максимальное входное напряжение и технология микроминиатюризации находятся в обратной зависимости; они не действуют взаимно, как «большее служит меньшему». Если вы выберете высокое входное напряжение, тогда размер ИС будет больше, а производительность снизится, а если вы выберете ИС небольшого размера, вам нужно будет осторожно относиться к максимальному входному напряжению. Существуют различные стабилизаторы CMOS с различным максимальным входным напряжением для различных приложений.Вы должны выбрать наиболее подходящие, внимательно изучив типы источников питания и желаемые характеристики вашего устройства [см. Таблицу 2].
| Рабочее напряжение | Серия продуктов | Пакет | ||||
|---|---|---|---|---|---|---|
| USP-3 | СОТ-23 | СОТ-89 | СОТ-223 | К-252 | ||
| 1.5 В ~ 6 В | XC6218 | ○ | ||||
| 1,8 В ~ 6 В | XC6206 | ○ | ○ | |||
| 2 В ~ 10 В | XC6201 | ○ | ||||
| 2 В ~ 20 В | XC6202 | ○ | ○ | ○ | ||
| 2В ~ 28В | XC6216 | ○ | ○ | ○ | ||
можно разделить на категории с низким потребляемым током, большим током, высоким напряжением, высокоскоростным, LDO и т. Д.Для этих категорий нет строгого определения, но обычно «низкий ток питания» — это те, у которых ток питания составляет несколько мкА, «большой ток» — те, которые могут тянуть 500 мА или более, «высокое напряжение» — те, которые имеют напряжение от 15 В до 20 В или более, а «высокоскоростные» — это те, у которых частота подавления пульсаций составляет приблизительно 60 дБ при 1 кГц. «LDO» также не имеет точного определения. Первоначально это относилось к низкому выпадению выхода PNP и выхода P-ch MOSFET, по сравнению с падением выхода эмиттерного повторителя NPN и выхода NPN Дарлингтона биполярного линейного регулятора.На рисунке 2 показаны типы выходных транзисторов. В наши дни значение менее 2 Ом при 3,3 В при преобразовании сопротивления во включенном состоянии становится одним из стандартов определения.
[Рисунок 2] Модели выходного драйвера
Выход повторителя эмиттера NPN
Цепь управления должна быть на 0,6 В (базовое напряжение) выше, чем выходной контакт, чтобы протекать базовый ток. Схема управления работает от источника входного питания, поэтому необходимо падение напряжения 0,6 В.
NPN Выход Дарлингтона
1.Требуется падение напряжения 2 В или более, поскольку схема состоит из 2 цепей эмиттерных повторителей. Схема может выводить большой ток, потому что базовый ток нагрузочного транзистора может быть усилен предварительным драйвером.
Транзисторный выход PNP
PMOS транзисторный выход
Транзистор включается, когда входное напряжение ниже, чем напряжение базы и / или подается напряжение затвора. Нет ограничений на входное напряжение источника питания относительно выходного напряжения.Падение напряжения невелико, потому что схема работает, если есть базовое напряжение или напряжение затвора и входное напряжение питания, которое может управлять схемой управления.
Кроме вышеуказанных типов регуляторов, существуют регуляторы с функцией ВКЛ / ВЫКЛ с помощью контакта Chip Enable в зависимости от потребности, композитные регуляторы с 2 или 3 каналами, регуляторы со встроенным детектором напряжения и многое другое. Такое разнообразие — еще одна особенность CMOS. Это связано с тем, что процесс CMOS может легко масштабировать схемы и снизить ток питания, поскольку он может полностью отключать определенные блоки ИС, когда схемы выключаются отдельно.На рисунке 3 показана блок-схема двухканальных выходных регуляторов серии XC6415. Этот продукт может включать и выключать VR1 и VR2 независимо.
[Рисунок 3] Блок-схема 2-канального регулятора (серия XC6415)
Внутренняя схема и основная структура
Внутренняя схема состоит из источника опорного напряжения, усилитель ошибки, с предварительно установленной резистором выходного напряжения, и выходной Р-канальный МОП-транзистор транзистора.В некоторых схемах также есть ограничитель постоянного тока, схема возврата и функция теплового отключения для защиты. Так как трудно построить опорные схемы запрещенной зоны, которые используются для биполярных процессов в качестве источника опорного напряжения, как правило, источники опорного напряжения, используемые являются уникальными для процесса CMOS. По этой причине температурные характеристики выходного напряжения, как правило, немного хуже, чем у биполярных линейных регуляторов.
Кроме того, внутренняя фазовая компенсация и схемы различаются в зависимости от типов регуляторов, таких как малый ток питания, высокая скорость и совместимость с конденсаторами с низким ESR.Например, в то время как регулятор низкого тока питания обычно использует два усилителя, высокоскоростной регулятор иногда содержит три усилителя. На рисунке 4 показана принципиальная блок-схема высокоскоростного регулятора.
Добавляя буферный усилитель между предусилителем и выходным P-канальным MOSFET-транзистором, буферный усилитель может управлять нагрузочным P-ch MOSFET транзистором с более высокой скоростью, несмотря на большую емкость затвора. Выходное напряжение может определяться номиналами разделенных резисторов R1 и R2, а предельное значение тока определяется номиналами разделенных резисторов R3 и R4.Каждое значение точно устанавливается обрезкой. Многие регуляторы быстродействующего типа совместимы с конденсаторами с низким ESR, такими как керамические конденсаторы, потому что они в основном используются для беспроводных приложений и портативных электронных устройств, и поэтому необходимо их уменьшение.
[Рисунок 4] Принципиальная принципиальная блок-схема регулятора быстродействующего типа
Следующая страница
Важные особенности линейного регулятора CMOS
Цепи пререгуляторадля линейных источников питания — электронные проекты для развлечения
Линейные источники питания могут быть действительно хорошими в отношении шума и пульсаций, но обычно они не являются энергоэффективными.При маломощных рычагах это можно игнорировать, но большой лабораторный источник питания с широким диапазоном напряжения может сжечь огромное количество тепла при коротком замыкании. Конечно, с этим справятся большие кулеры и вентиляторы. Тем не менее, это не удовлетворительное решение.
Есть несколько способов решить проблему низкой эффективности. Вы могли:
Выключатель трансформатора ответвлений . Это часто делается с помощью коммерческих настольных источников питания. Это может быть сделано с использованием полупроводников (лучше) или реле (хуже) для переключения.Преимущество заключается в отсутствии дополнительных шумов и пульсаций, но у вас есть некоторая схема «переключения диапазонов», которая гарантирует, что для линейного регулятора всегда остается достаточный запас по напряжению. Не так эффективно, как импульсный источник питания, но все же хорошо, поскольку максимальное рассеивание можно сократить вдвое или даже меньше с большим диапазоном.
Используйте предварительные регуляторы SCR . В прошлом они часто использовались в коммерческих целях для более высоких мощностей, они могут работать в асинхронном режиме (включать их, если дифференциал входа / выхода становится слишком низким, независимо от времени в линейном цикле) или путем регулирования задержки срабатывания с помощью пропорционального регулятора. петля.В принципе, время реакции растворов SCR всегда составляет, по крайней мере, половину цикла частоты линии, поэтому необходимо следить за тем, чтобы в буферных крышках всегда было достаточно заряда, чтобы выдержать это в случае изменения нагрузки без провала выходного напряжения. SCR обычно медленные и не создают так много RFI, особенно когда вы правильно фильтруете и демпфируете свою схему. Старые руководства HP могут показать вам, как это делается. Для низковольтных источников питания тиристоры обычно располагаются перед сетевым трансформатором.
Используйте переключатель включения / выключения MOSFET .Может быть выполнено аналогично решению SCR, но теперь вы можете включать и выключать их даже в течение сетевого цикла при необходимости. Логика более сложная и создает больше всплесков, чем решение SCR из-за более быстрого переключения.
Используйте импульсный стабилизатор с более высокой частотой , чтобы снизить входное напряжение линейного регулятора всего на несколько вольт выше выходного напряжения. Импульсный стабилизатор имеет высокий КПД, поэтому мощность, рассеиваемая на проходном транзисторе линейного регулятора, представляет собой просто разницу напряжений между его входом и выходом, умноженную на ток нагрузки.С точки зрения тепловыделения это очень эффективно, проблема здесь в том, чтобы избавиться от скачков полосы пропускания и шума, вносимого схемой переключения.
Ответвители с переключающим трансформатором
Это можно сделать с помощью реле (я не буду описывать их, потому что считаю, что в настоящее время этого недостаточно из-за износа контактов, вызванного постоянным переключением «искрящихся» индуктивных нагрузок и высоких пусковых токов в конденсаторы фильтра), тиристорами или даже полевыми МОП-транзисторами.
В статье HP Journal объясняется, как переключение диапазона осуществляется с помощью симисторов:
Симисторы запускаются с использованием последовательности импульсов 18 кГц.Страницы журнала HP можно увидеть здесь:
Щелкните здесь для получения информации по применению HP, описывающей широкий диапазон источников питания компактных размеров…
Используя эту схему, вы можете выбрать одно из 4 входных напряжений в ваш линейный регулятор (все симисторы выключены, N1 включены, N2 включены, все включены).
Здесь представлена элегантная схема из старой книги Elektor:
Вам нужен трансформатор с центральным отводом, и он работает с входами логического уровня.
Предварительные регуляторы SCR
Схема того, как это делается, показано ниже (посмотрите на середину слева, из старого руководства по обслуживанию блоков питания HP):
Щелкните здесь для увеличения изображения…
Другой пример пререгулятора непрерывного действия SCR на первичной стороне показан ниже:
Щелкните здесь, чтобы увидеть источник питания с первичным регулированием SCR от SGS…
Микросхема генерирует пусковые импульсы и управляет синхронизацией.
Пример регулятора непрерывного действия для вторичной обмотки показан здесь (из лабораторного источника питания Delta с конца 70-х годов):
Пример прерывистого регулятора показан ниже. Если разница между выходным и входным напряжениями линейного регулятора становится слишком большой, симистор не срабатывает.
Несколько слов предупреждения для регуляторов SCR:
- Ток нагрузки может стать серией узких импульсов вместо синусоидального тока.Номинал трансформатора необходимо соответственно увеличить (на 50,100%), в противном случае возможно насыщение.
- В зависимости от конструкции трансформатора «неровные» шумы являются нормальным явлением для источников SCR при работе с переменными большими нагрузками.
- Не все комбинации настроек напряжения и нагрузок приводят к срабатыванию триггера тиристора с постоянным фазовым углом. Это хаотический контур управления, поэтому при определенных настройках нагрузки можно ожидать «рычащего» шума.
- Используйте демпферы и надлежащую линейную фильтрацию на входе блока питания, чтобы избежать перегрузки электросети радиочастотными помехами.
Предварительные регуляторы MOSFET
Вместо SCR вы можете использовать полевые МОП-транзисторы в качестве переключателей предварительного регулятора, как показано на рисунке ниже:
В случае, если дифференциал входного выхода становится слишком большим, SCR (может быть эмулирован двумя транзисторами) срабатывает и отключает полевые МОП-транзисторы с P-каналом. Пока дифференциал достаточно мал, полевые МОП-транзисторы полностью проводящие и заряжают входной конденсатор линейного регулятора. Это опять же прерывистый регулятор, как и SCR.
Высокочастотные пререгуляторы переключения
Хороший пример такого зверя — это дизайн ChangPuak, показанный здесь:
Щелкните здесь, чтобы увидеть импульсный регулятор с линейным форсажем от ChangPuak…
В нем используется микросхема переключателя Linear Tech, которая имеет очень простой дизайн.
Литература
Некоторые принципы поясняются в примечаниях по применению HP, см. Ниже:
Щелкните здесь, чтобы просмотреть примечания по применению HP о работе линейного источника питания…
Линейный стабилизатор LDO
07.03.2011. Схема применения линейного регулятора (LDO) Блок-диаграмма.
Презентация на тему: «Линейный стабилизатор LDO 03.07.2011. Схема применения линейного регулятора (LDO) Блочная диаграмма.» — стенограмма презентации:
1 Линейный стабилизатор LDO 07.03.2011
2 Схема применения линейного регулятора (LDO) Блок-диаграмма
3 Зачем использовать LDO и проблемы. Простая конструкция. Простая структура и низкая стоимость. Отсутствие пульсаций и меньшее количество шумов. Быстрый переходный отклик. Зачем использовать: Проблемы: Низкая эффективность. Выходное напряжение должно быть ниже, чем входное.
4 Нижнее падение напряжения (Vdo) Нижний ток покоя (ток заземления) Переходная характеристика линии и нагрузки PSRR (коэффициент отклонения источника питания) Ограничение тока и тепловая защита Основные характеристики выходного напряжения шума (LDO)
5 Для поддержания выходного напряжения в пределах заданного напряжения требуется минимальное различное напряжение между входами и выходами.например, Vin_min = 2,8 В (типичное Vo) + 0,3 В (Vdo) = 3,1 В более высокая эффективность для меньшего Vin-Vo более длительный срок службы батареи. Батарея разряжается до Vbat = Vo + Vdo Dropout Voltage (LDO)
6 Ток покоя (LDO) Ток покоя (Iq): ниже Iq, выше эффективность. Особенно важно в режиме ожидания
8 Переходная характеристика (LDO) Переходная характеристика нагрузки: Нагрузка Vin Vo Cout esr Cb LDO INOUT GND Cin
9 Указывается в дБ при 100, 1 кГц или 10 кГц.PSRR (LDO) Коэффициент подавления мощности: -66 дБ при 10 кГц
10 Стабильность LDO требует правильного значения Cout esr для создания нуля и достаточного запаса по фазе для поддержания стабильности контура управления. Обычно стабильная область ESR указывается в таблицах данных. RL Vin Vo Cout esr Cb LDO INOUT GND Cin Стабильный диапазон Нестабильный диапазон V IN = 4,3 В C IN = C OUT = 1 мкФ
11 В основном вызвано опорным напряжением внутренней запрещенной зоны.Для ВЧ-приложений (Wifi, Wimax, MP) требуется LDO с низким напряжением шума <100 мкВ (среднеквадратичное значение), чтобы шумовое напряжение не мешало РЧ-сигналам. Низкий выходной шум (LDO) Выходное шумовое напряжение: В IN = 3,3 В OUT = 1,8 В / 10 мА θnθn Выходное шумовое напряжение = 28,4 мкВ среднеквадр.
12 Эффективность и тепловая проблема (LDO) Эффективность: Рассеиваемая мощность (Pd): рассеиваемая мощность устройства должна быть ниже номинальной мощности корпуса Pd = (Vi –Vo) * Io Температурная проблема: типовая номинальная мощность корпуса ниже для справки (см. таблицы данных JA, данные для расчета для каждого LDO) SOT23 / 25/26: Pw = 0.35 Вт SOT89: Pw = 0,5 Вт SOT223: Pw = 0,8 Вт TO252: Pw = 1,2 Вт TO263: Pw = 2 Вт SOP8: Pw = 0,6 Вт JA: тепловое сопротивление от перехода к окружающей среде JC = тепловое сопротивление от перехода (температура матрицы) к делу
разница между импульсным регулятором и линейным регулятором?
Добро пожаловать на EDAboard.com
Добро пожаловать на наш сайт! EDAboard.com — это международный электронный дискуссионный форум, посвященный программному обеспечению EDA, схемам, схемам, книгам, теории, статьям, asic, pld, 8051, DSP, сети, RF, аналоговому дизайну, печатным платам, руководствам по обслуживанию… и многое другое! Для участия вам необходимо зарегистрироваться. Регистрация бесплатна. Нажмите здесь для регистрации.
регистр АвторизоватьсяJavaScript отключен. Для большего удобства включите JavaScript в своем браузере, прежде чем продолжить.
- Статус
- Закрыто для дальнейших ответов.
- Зарегистрирован
- 30 мая 2006 г.
- Сообщения
- 1
- Помогли
- 0
- Репутация
- 0
- Оценка реакции
- 0
- Трофейные очки
- 1,281
- Очки активности
- 1,294
В чем основное отличие импульсного регулятора от линейного регулятора? для преобразователя постоянного тока в постоянный, какой регулятор используется? отправить, если имеется подтверждающая документация
- Зарегистрирован
- 11 июля 2002 г.
- Сообщения
- 1 014
- Помогли
- 192
- Репутация
- 384
- Оценка реакции
- 180
- Трофейные очки
- 1,343
- Расположение
- Южная Африка
- Очки активности
- 4,515
Низкий КПД линейного регулятора (<20%).(дифференциал входного и выходного напряжения преобразуется в тепло)
Импульсный стабилизатор имеет высокий КПД. (90%)
Planet Analog — Построение высоковольтного линейного регулятора
Примечание редактора: Наши гостевые блоггеры:
Дональд Шелле (Donald Schelle) — инженер по аналоговым полевым приложениям в компании Texas Instruments и имеет более десяти лет инженерного опыта.Он получил степень бакалавра электротехники в Лейкхедском университете, Тандер-Бей, Онтарио, Канада. С Дональдом можно связаться по адресу [email protected].
Джаред Беккер — инженер по приложениям в Texas Instruments. Он получил степень бакалавра электротехники в Университете штата Аризона. С Джаредом можно связаться по адресу [email protected].
Введение
Регулировка от очень высокого напряжения (> 200 В) до уровня, пригодного для использования современной электроникой (например, 3.3 V) — трудное предложение. Для приложений, требующих тока более 1-2 мА, разработчики избегают простой комбинации резистора / стабилитрона в пользу более сложного решения. Управление рассеиваемой мощностью при сохранении недорогой схемы также может быть сложной задачей. Схема на рис. 1 Рисунок 1 — это простой недорогой регулятор, который обеспечивает высокие коэффициенты понижения при выходных токах 5 мА при минимальной стоимости; менее 0,50 доллара США в небольшом объеме.
Рисунок 1
Создайте простой высоковольтный линейный стабилизатор, используя несколько недорогих компонентов.
В этой статье мы представляем подробные проектные расчеты и компромиссы, необходимые для удовлетворения требований широкого диапазона входного напряжения. Для нашего примера регулятора мы выбрали следующие конструктивные параметры:
- В ВХОД (МАКС.) = 250 В
- В ВЫХ = 3,3 В
- I ВЫХ = 5 мА
- T A (МАКС.) = 60 o C (максимальная температура окружающей среды)
Управление рассеиваемой мощностью
Управление расчетными тепловыми характеристиками является центральным элементом функционального прототипа с первым проходом.Увеличение диапазона входного напряжения требует тщательного выбора компонентов.
Рассеиваемая мощность проходного транзистора ограничивает выходной ток. Уравнение 1 рассчитывает максимальный ток как функцию рассеиваемой мощности проходного транзистора:
Когда транзистор подключен к куску меди весом 1 унцию (который действует как теплоотвод) с размерами 15 x 15 мм, выбранный транзистор (FCX458) определяется как Θ JA = 125 o C / W. При этих параметрах транзистор достигнет максимальной температуры перехода 150 o ° C, когда выходной ток равен 2.92 мА. Увеличение меди, присоединенной к транзистору, до 50 x 50 мм снижает Θ JA до 60 o C / W и дает максимальный выходной ток 6,08 мА. Это находится в пределах проектной спецификации 5 мА.
Рассеяние мощности в шунтирующем резисторе R SH также будет максимальным, когда входное напряжение находится на пике. Уравнение 2 рассчитывает минимальное значение сопротивления R SH на основе максимальной рассеиваемой мощности резистора:
Ограничение мощности, рассеиваемой в резисторе, до 350 мВт дает сопротивление шунта 174 кОм, что является стандартным значением резистора 1% Управления энергетической информации (EIA).Большая часть мощности, рассеиваемой в цепи, происходит либо в шунтирующем резисторе R SH , либо в проходном транзисторе Q P . Таблица 1 показывает рассеиваемую мощность в минимальной и максимальной расчетных рабочих точках.
Таблица 1
Рассеиваемая мощность переключается между шунтирующим резистором и проходным транзистором в зависимости от рабочей точки схемы.
Как правило, потери мощности минимальны при минимальном входном напряжении.Потери мощности в резисторе максимальны при максимальном входном напряжении. Потери мощности в транзисторе максимальны, когда выходной ток и входное напряжение максимальны.
Оптимизация для минимального входного напряжения
Вы можете оптимизировать конструкцию для самого широкого диапазона входных источников питания, выбрав транзистор с высоким бета, β и шунтирующий стабилизатор с низким минимальным катодным током, I K (MIN) . Несколько популярных вариантов шунтирующих регуляторов включают TL431 и TLV431.Эти устройства имеют значения I K (MIN) , равные 1 мА и 80 мкА соответственно. Усовершенствованный ATL431 снижает минимальный катодный ток до 40 мкА. Уравнение 3 вычисляет минимальное входное напряжение как функцию минимального катодного тока:
Уменьшение I K (MIN) путем выбора подходящего устройства TL431 и увеличения β транзистора играет решающую роль в максимальном увеличении диапазона входного напряжения. Рисунок 2 отображает минимальное входное напряжение как функцию от β.Уменьшение минимального тока регулирования устройства TLV431 на 50 процентов снижает требования к транзистору β в равной степени. В качестве альтернативы вы можете сохранить бета-коэффициент и получить дополнительный диапазон входного напряжения. Если подходящие компоненты недоступны для соответствия целевому диапазону входного напряжения, увеличение мощности, рассеиваемой в шунтирующем резисторе, снизит минимальное входное напряжение за счет большего количества тепла, рассеиваемого в конструкции.
Рисунок 2
Минимальное входное напряжение резко меняется в зависимости от минимального рабочего тока шунтирующего регулятора.Усовершенствованный ATL431 снижает требования к бета-версии транзисторов почти на 50 процентов.
Проверка схемы
При тестировании цепей, работающих под высоким напряжением, важно обращать особое внимание на соответствующие меры безопасности. Высокое напряжение может быть опасным, и вы должны относиться к нему осторожно, уважительно и разумно. Если вы не знакомы с соответствующими мерами безопасности, обратитесь за квалифицированной помощью, прежде чем включать питание.
Тестирование схемы дало хорошие результаты.Выходной конденсатор необходим для предотвращения колебаний регулируемого напряжения. Схема в Рис. 1 показывает 10 мкФ, но мы смогли добиться стабильности с емкостью всего 4,7 мкФ. Переходные характеристики от холостого хода к полной нагрузке также были в пределах допуска. Захват осциллографа на рис. 3 (кривая № 2) показывает пульсацию примерно 200 мВ во время переходного процесса. Ключевым моментом также является то, что схема предназначена для работы вне пределов полупроводникового процесса для ATL431.Поскольку типичное значение I K (MIN) намного ниже максимального, измеренное минимальное входное напряжение было намного ниже расчетного.
Рисунок 3
При входном напряжении 200 В (желтая кривая) выходное напряжение (синяя кривая) поддерживает регулирование во время переходного процесса нарастания нагрузки 0–5 мА, начинающегося после выхода триггера (фиолетовая кривая).
