Что такое магнитный энкодер. Как работают магнитные энкодеры различных типов. Для чего используются магнитные энкодеры. Каковы преимущества магнитных энкодеров перед оптическими.
Что такое магнитный энкодер и как он устроен
Магнитный энкодер — это устройство для определения положения и скорости вращения, использующее изменение магнитного поля. Основные компоненты магнитного энкодера:
- Постоянный магнит, прикрепленный к вращающемуся валу
- Магнитный датчик (обычно на эффекте Холла), установленный неподвижно
- Электронная схема обработки сигнала
При вращении вала магнит создает переменное магнитное поле, которое регистрируется датчиком и преобразуется в электрический сигнал. Этот сигнал обрабатывается и выдается в виде информации о положении и скорости.
Принцип работы магнитных энкодеров
Существует несколько типов магнитных энкодеров, работающих на разных принципах:
1. Энкодеры с переменным магнитным сопротивлением
Простейший тип, состоящий из зубчатого колеса и магнитного датчика. При прохождении зубьев мимо датчика генерируются импульсы напряжения. Имеют ограниченное разрешение, обычно 120-240 импульсов на оборот.

2. Магниторезистивные энкодеры
Используют массив тонкопленочных резисторов и кольцо с магнитными доменами. При вращении кольца сопротивление резисторов меняется, формируя синусоидальный сигнал. Обеспечивают более высокое разрешение.
3. Энкодеры на эффекте Холла
Наиболее современный тип. Датчик Холла генерирует напряжение при прохождении магнитных доменов кольца. Компактны, имеют высокое разрешение, могут объединяться в массивы для повышения точности.
Преимущества магнитных энкодеров
По сравнению с оптическими энкодерами магнитные имеют ряд важных преимуществ:
- Высокая устойчивость к загрязнениям, влаге, вибрациям
- Работоспособность в широком диапазоне температур
- Нечувствительность к электромагнитным помехам
- Длительный срок службы без обслуживания
- Компактные размеры
Области применения магнитных энкодеров
Магнитные энкодеры широко используются в промышленности и робототехнике, особенно в сложных условиях эксплуатации:
- Станки с ЧПУ и промышленные роботы
- Подъемно-транспортное оборудование
- Нефтегазовое и горнодобывающее оборудование
- Сельскохозяйственная техника
- Двигатели и приводы
- Медицинское оборудование
Как выбрать магнитный энкодер
При выборе магнитного энкодера следует учитывать следующие параметры:

- Требуемое разрешение и точность
- Условия эксплуатации (температура, влажность, вибрации)
- Диапазон скоростей вращения
- Тип выходного сигнала
- Габаритные размеры
- Совместимость с системой управления
Правильно подобранный магнитный энкодер обеспечит надежную работу системы управления движением в самых сложных условиях эксплуатации.
Новые тенденции в технологии магнитных энкодеров
Развитие технологии магнитных энкодеров продолжается по нескольким направлениям:
- Повышение разрешения и точности измерений
- Уменьшение габаритных размеров
- Снижение энергопотребления
- Интеграция с другими датчиками в единые модули
- Расширение функциональности за счет встроенных микропроцессоров
Эти улучшения позволяют применять магнитные энкодеры в еще более широком спектре задач управления движением и позиционирования.
Сравнение магнитных и оптических энкодеров
Хотя магнитные энкодеры имеют ряд преимуществ, в некоторых приложениях оптические энкодеры могут быть предпочтительнее. Сравним их основные характеристики:

| Параметр | Магнитные энкодеры | Оптические энкодеры |
|---|---|---|
| Устойчивость к загрязнениям | Высокая | Низкая |
| Максимальное разрешение | Среднее | Очень высокое |
| Диапазон рабочих температур | Широкий | Ограниченный |
| Стоимость | Средняя | Высокая |
| Долговечность | Высокая | Средняя |
Выбор между магнитным и оптическим энкодером зависит от конкретных требований приложения и условий эксплуатации.
Заключение
Магнитные энкодеры являются надежным и эффективным решением для измерения положения и скорости в промышленных системах управления движением. Их устойчивость к неблагоприятным воздействиям, долговечность и широкий диапазон рабочих условий делают их незаменимыми во многих областях применения. С развитием технологий магнитные энкодеры продолжают совершенствоваться, открывая новые возможности для точного и надежного управления движением в самых сложных условиях эксплуатации.
MRV: энкодеры магнитные абсолютные OPKON. КИП-Сервис: промышленная автоматика
Главная Датчики положения OPKON Угловые энкодеры MRV
Муфта и кронштейн в комплекте
Защита от пыли и брызг воды
Рабочая температура -20…+80 °C
Аналоговый выход 0…5 В
Диаметр корпуса 50 мм
| Наименование | Тип документа | Размер | Тип файла |
|---|---|---|---|
| Паспорт OPKON | Паспорт | 86 KB | |
| ТО к MRV50 (ENG) | Техническое описание | 697 KB | |
| ТО к MRV50 (RUS) | Техническое описание | 115 KB |
Документация и ПО
3 файла, 898 KB
| Наименование | Наличие | Цена с НДС | |
|---|---|---|---|
|
MRV 50AR8 ANL 5V45 VO V2 2M5R SL Абсолютный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=8мм, выходной сигнал 0…5В/45°, Uпит. =8…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 8×8 и кронштейн в комплекте) |
В наличии | 9 401 | Купить |
|
MRV 50AR8 ANL 5V360 VO V2 2M5R SL Абсолютный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=8мм, выходной сигнал 0…5В/360°, Uпит. =8…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 8×8 и кронштейн в комплекте) |
В наличии | 9 401 | Купить |
Абсолютные магнитные энкодеры (датчики угла поворота) предназначены для преобразования угла поворота в аналоговый сигнал.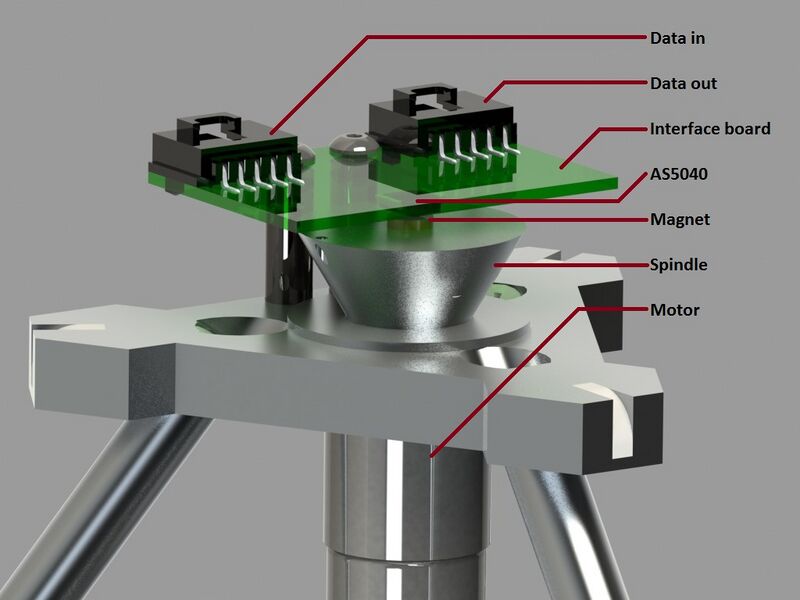 Энкодеры MRV измеряют абсолютное положение вала в пределах рабочего диапазона (от 45° до 360° ). С помощью выходного аналогового сигнала 0…5 В информация о текущем положение вала передается в систему управления (например, в ПИД-регулятор ECD2-M).
Энкодеры MRV измеряют абсолютное положение вала в пределах рабочего диапазона (от 45° до 360° ). С помощью выходного аналогового сигнала 0…5 В информация о текущем положение вала передается в систему управления (например, в ПИД-регулятор ECD2-M).
Совместно с абсолютными магнитными энкодерами широко используются энкодеры других серий:
- Серия оптических энкодеров PRI
Универсальные инкрементальные энкодеры с разрешением до 5000 имп/об. - Энкодеры OPKON PRI 50H с полым валом
Для установки на вал механизма, занимают минимум пространства. - Линейные энкодеры
Для измерения линейного перемещения, с удобным монтажом.
Абсолютные магнитные энкодеры предназначены для измерения угла поворота. Энкодер MRV преобразует угол поворота (от 45° до 360°) в сигнал 0…5 В. Отличительной особенностью серии MRV является отсутствие необходимости в начальной инициализации (в пределах одного оборота) — энкодер отслеживает положение вала без источника питания.
- Рабочая температура: -20…+80 °C
- Диаметр корпуса 50 мм
- Выходной сигнал =0…5 В / 360°, 180°, 90° и 45°
- Модификации с угловым и осевым кабельным вводом
- Защита от пыли и брызг воды IP54
Принцип действия энкодеров OPKON MRI основан на эффекте Холла: под действием внешнего магнитного поля в проводнике с постоянным током возникает холловское напряжение (поперечная разность потенциалов). В энкодерах OPKON серии MRI роль источника магнитного поля выполняет постоянный магнит, установленный на валу энкодера. А измерение напряжения осуществляется с помощью интегральной микросхемы со встроенным датчиком магнитного поля.
В энкодерах OPKON серии MRI роль источника магнитного поля выполняет постоянный магнит, установленный на валу энкодера. А измерение напряжения осуществляется с помощью интегральной микросхемы со встроенным датчиком магнитного поля.
При повороте вала формируется выходной сигнал энкодера, он представляет собой разность потенциалов. Величина сигнала изменяется от 0 до 5 В. Благодаря аналоговому сигналу всегда может быть определено положение вала энкодера.
В зависимости от модификации энкодер MRV может выдавать 4 типа сигналов:
- 5 В / 360°.
Сигнал 0…5 В изменяется линейно, в диапазоне от 0 до 360°. При возврате в начальную точку, значение сигнала становится равно 0 В.
- 5 В / 180°.
Сигнал 0…5 В изменяется линейно, в диапазоне от 0 до 180°. При нахождении вала в положении 180…270° сигнал соответствует 5 В, в положении 270…360° — 0 В.
- 5 В / 90°.
Сигнал линейно изменяется в диапазоне 0…90° и 180…270°.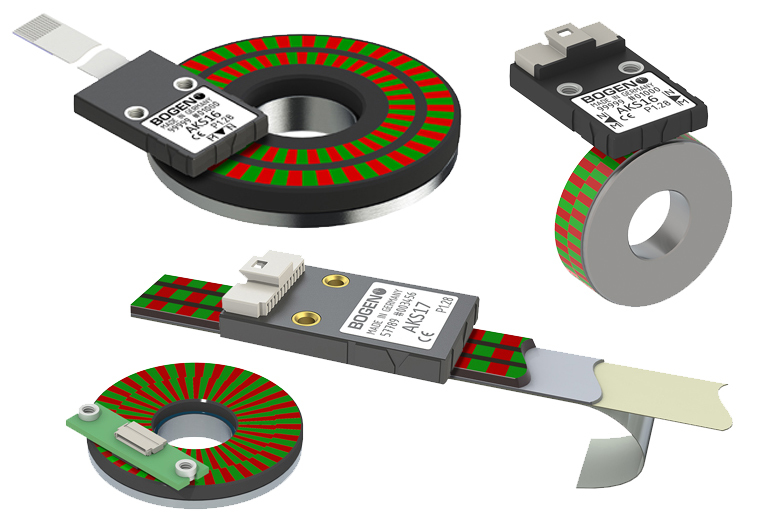 В положении 90…180° и 270…360° сигнал равен 5 В и 0 В соответственно.
В положении 90…180° и 270…360° сигнал равен 5 В и 0 В соответственно.
- 5 В / 45°.
Сигнал линейно изменяется в диапазоне 0…45° и 180…225°. В положении 45…180° и 225…360° сигнал равен 5 В и 0 В соответственно.
| Параметр | Значение |
|---|---|
| Разрешение | 10 бит, =5 В 45° / 90° / 180° / 360° |
| Выходной сигнал | =0…5 В |
| Напряжение питания | =5 В, =8…24 В |
| Потребляемый ток | не более 40 мА при =24 В |
| Способ подключения | кабель 2,5…10 м |
| Максимальная скорость вращения | 1000 об/мин |
| Максимальная радиальная нагрузка на вал | 100 Н |
| Максимальная осевая нагрузка на вал | 60 Н |
| Диаметр корпуса | 50 мм |
| Материал корпуса | алюминий, сталь |
| Диаметр вала | 8 мм |
| Материал вала | нержавеющая сталь |
| Степень защиты | IP54 |
| Рабочая температура | -20…+80 °C |
| Температура хранения | -30…+90 °C |
| Комплект поставки | Г-образный кронштейн, муфта |
Абсолютный магнитный энкодер OPKON MRV50
Габаритные размеры инкрементального оптического энкодера OPKON MRV50, мм
| R | D |
|---|---|
| ∅ 8 мм | 7,3 мм |
| Контакт | Обозначение | Описание |
|---|---|---|
| Коричневый | V+ | Питание, =5 В, =8…24 В |
| Белый | V- | Питание, 0 В |
| Желтый | A | Выходной сигнал, фаза А |
| Экран | GND | Заземление |
| MRV | ANL | VO | SL | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 50 мм | 50 | |||||||||
| Стандартное исполнение | A | |||||||||
| Защищенное исполнение | AW | |||||||||
| 8 мм | R8 | |||||||||
| Масштабирование сигнала =0…5 В на угол 360° | 5V360 | |||||||||
| Масштабирование сигнала =0…5 В на угол 180° | 5V180 | |||||||||
| Масштабирование сигнала =0…5 В на угол 90° | 5V90 | |||||||||
| Масштабирование сигнала =0…5 В на угол 45° | 5V45 | |||||||||
| = 5 В | V1 | |||||||||
| = 8…24 В | V2 | |||||||||
| Кабель, 2,5 метра | 2M5 | |||||||||
| Угловой | R | |||||||||
Пример: MRV 50AR8 ANL 5V45 VO V2 2M5R SL.
Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-Pull, разрешение 500имп/об, выход ABZ, Uпит. =8…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте)
Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-Pull, разрешение 500имп/об, выход ABZ, Uпит. =8…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте) — цена, купить в интернет-офисе КИП-Сервис-
Техническая поддержка
- Видео
- Статьи
- Библиотеки EPLAN
- Цены и документация
- Контакты
Документация и ПО
4 файла, 1 MB
Инкрементальный магнитный энкодер (Цельный вал, Dкорп.=50мм, Dвала=6мм, выходной сигнал Push-Pull, разрешение 500имп/об, выход ABZ, Uпит. =8…24В, IP54, кабель 2,5 метра, угловой ввод, муфта 6×6 и кронштейн в комплекте)
Товар снят с продажи
Характеристики товара
Энкодеры
| Размер корпуса | 50 |
| Тип вала | Цельный вал 6мм мм |
| Тип выходного сигнала | Push-Pull (Инкрементальный) |
| Разрешение | 500 |
| Напряжение питания |
=8. ..24В ..24В |
| Подключение | Угловой кабельный ввод |
| Тип | Магнитный |
Аксессуары к этому товару
| Фото | Описание | Цена с НДС | Кол-во | Наличие |
|---|---|---|---|---|
| Plastic Coupling 6*6 Муфта присоединительная (пластик, D1=6мм, D2=6мм) | 531 |
|||
| Plastic Coupling 6*8 Муфта присоединительная (пластик, D1=6мм, D2=8мм) | 531 |
|||
| Plastic Coupling 6*10 Муфта присоединительная (пластик, D1=6мм, D2=10мм) | 531 |
|||
| Metal Spring Coupling 6*6 Муфта присоединительная (пружина, D1=6мм, D2=6мм) | 1 594 |
|||
| Metal Coupling 6*6 Муфта присоединительная (металл, D1=6мм, D2=6мм) | 1 063 |
|||
| Metal Coupling 6*8 Муфта присоединительная (металл, D1=6мм, D2=8мм) | 1 063 |
Показано 10 из 6
Наверх
При добавлении товара возникла ошибка. Пожалуйста, повторите попытку чуть позже.
Пожалуйста, повторите попытку чуть позже.
OK
#05 Принцип и преимущества магнитного энкодера | Учебники | Датчики угла поворота | Продукция
5-1. Структура магнитного энкодера
Рисунок 5-1. Схема магнитного энкодера
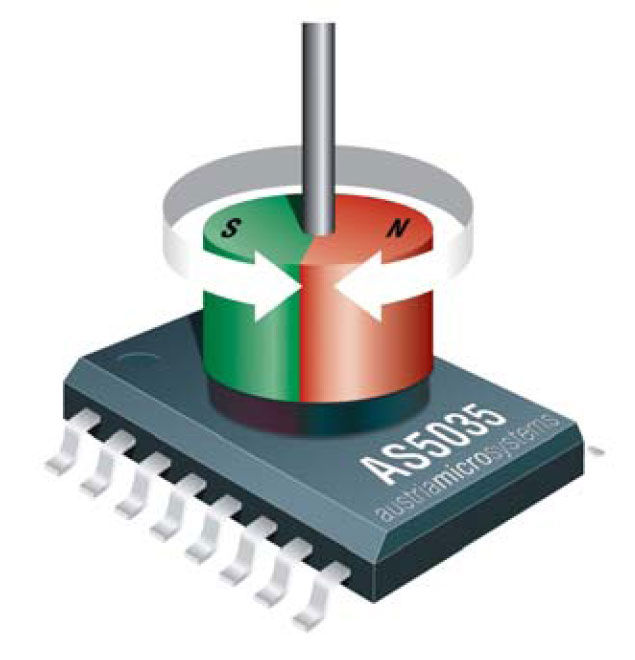
Магнитный энкодер определяет информацию о положении вращения как изменение магнитного поля, преобразует ее в электрические сигналы и выводит. Простейший магнитный энкодер состоит из постоянного магнита и магнитного датчика. Постоянный магнит прикреплен к наконечнику вращающегося тела, такого как вал двигателя, а магнитный датчик фиксируется в состоянии, когда он установлен на печатной плате в положении, в котором он принимает магнитное поле, создаваемое постоянным магнитом. Когда постоянный магнит, прикрепленный к валу двигателя, вращается, направление магнитного поля, определяемое магнитным датчиком, изменяется, в результате чего энкодер определяет положение вращения и скорость вала двигателя.
Далее мы подробно объясним принцип работы до тех пор, пока изменение распределения магнитного поля не будет преобразовано в угловую информацию, с использованием магнитного энкодера, состоящего из магнитного датчика, называемого элементом Холла, и постоянного магнита. Элемент Холла представляет собой магнитный датчик, использующий явление эффекта Холла для вывода напряжения, пропорционального напряженности магнитного поля.
Элемент Холла
Элементы Холла, используемые в магнитных энкодерах, изготовлены из полупроводниковых материалов.
Полупроводниковые материалы, используемые в элементах Холла, в основном представляют собой составные полупроводники, такие как высокочувствительный индий-сурьма (InSb), арсенид галлия (GaAs) со стабильными температурными характеристиками и арсенид индия (InAs) с хорошо сбалансированными чувствительностью и температурными характеристиками. Также используется кремний (Si), который можно установить на микросхему.
Кроме того, существует два типа элементов Холла, которые могут определять напряженность магнитного поля в вертикальном направлении, и тип, который может определять напряженность магнитного поля в горизонтальном направлении.
(Для получения подробной информации об элементе Холла см. «Основные сведения о магнитных датчиках», если вас это интересует.)
Постоянный магнит
В магнитных энкодерах обычно используются цилиндрические постоянные магниты. Существует два типа направлений намагничивания постоянных магнитов: радиальное направление и плоское направление (или осевое направление).
Пока выполняются условия плотности магнитного потока, необходимые для работы в качестве энкодера, можно свободно выбирать магнитный материал и размеры.
Как правило, в соответствии с цель.
Рисунок 5-2а. Радиально намагниченный магнит
Рисунок 5-2а. Радиально намагниченный магнит
Конфигурация постоянных магнитов и элементов Холла
Идеальным положением магнитного энкодера является то, что центр вращающегося вала, постоянный магнит и элемент Холла выровнены на одной линии. Такая конфигурация называется «конфигурация «конец вала».
Такая конфигурация называется «конфигурация «конец вала».
Тем не менее, даже с конфигурацией «Конец вала» на самом деле возникает небольшая ошибка позиционирования, называемая «смещением». Когда элемент Холла смещен, сила магнитного поля, обнаруженного элементом Холла, изменяется, что приводит к ошибке точности определения угла. Полностью устранить несоосность очень сложно.
Однако в конфигурации «вал-конец» элемент Холла размещается в области, где горизонтальное магнитное поле является однородным, так что эффект рассогласования может быть уменьшен, если элемент Холла определяет силу горизонтального магнитного поля.
Таким образом, элемент Холла, определяющий напряженность горизонтального магнитного поля, может уменьшить угловую ошибку из-за смещения по сравнению с элементом Холла, определяющим напряженность вертикального магнитного поля.
Рисунок 5-3а. Комбинация радиально намагниченного магнита и элемента Холла, определяющего силу горизонтального магнитного поля.
Рисунок 5-3б. Комбинация радиально намагниченного магнита и элемента Холла, определяющего силу вертикального магнитного поля.
Если вы хотите уменьшить рассеяние магнитного поля, поскольку рассеяние магнитного поля в боковом направлении неблагоприятно влияет на окружающее оборудование, используйте постоянный магнит, намагниченный в плоском направлении.
Однако по сравнению с магнитом, намагниченным в радиальном направлении, область однородного магнитного поля в горизонтальном направлении сужается, поэтому угловая ошибка из-за смещения относительно велика.
Рисунок 5-4а. Комбинация магнита, намагниченного в плоском направлении, и элемента Холла, определяющего силу горизонтального магнитного поля.
Рисунок 5-4б. Комбинация магнита, намагниченного в плоском направлении, и элемента Холла, определяющего силу вертикального магнитного поля.
Таким образом, преимущество конфигурации на конце вала заключается в том, что можно легко реализовать энкодер, устойчивый к смещению, путем объединения магнита, намагниченного в радиальном направлении, и элемента Холла, определяющего силу горизонтального магнитного поля. поле. На самом деле, также используется конфигурация Off-Axis, в которой элемент Холла размещается в положении, отличном от конца вала, но это будет подробно объяснено в следующей части.
Далее мы объясним принцип работы магнитного энкодера, состоящего из магнита, намагниченного в радиальном направлении, и элемента Холла, определяющего силу горизонтального магнитного поля.
Магнитные энкодеры | Dynapar
Сердцем энкодера является то, как он предоставляет информацию — это механизм энкодера . Механизм кодировщика принимает информацию о положении и скорости, а затем передает сигнал, который отправляется приложению.
Тип двигателя классифицируется по методу определения управляющей информации. Существует две основные категории:
- Оптические энкодеры, как маскированные, так и с фазированной решеткой
- Двигатель магнитного энкодера
Различия в способах сбора информации магнитным энкодером и оптическим энкодером приводят к различиям в производительности в разных операционных средах. Понимание того, как работают оптические и магнитные энкодеры, может помочь определить, какой тип энкодера лучше всего подходит для вашего приложения. Посмотреть все модели магнитных энкодеров можно здесь.
Что такое магнитные энкодеры?
Магнитные энкодеры представляют собой тип угловых энкодеров, в которых используются датчики для определения изменений магнитных полей от вращающегося намагниченного колеса или кольца.
Магнитный энкодер состоит из 3 основных компонентов:
- Цепь датчика
- Вращающееся колесо или кольцо
- Ряд магнитных полюсов по окружности колеса или кольца
Когда колесо или кольцо вращаются вокруг магнитного датчика, полюса вызывают предсказуемую реакцию датчика в зависимости от силы магнитного поля. Магнитный отклик подается через электрическую цепь формирования сигнала и выводится в виде цифрового сигнала на управляющее устройство.
Магнитный отклик подается через электрическую цепь формирования сигнала и выводится в виде цифрового сигнала на управляющее устройство.
Количество пар намагниченных полюсов на полюсе колеса, количество датчиков и тип электрической цепи вместе определяют разрешение магнитного энкодера. Ключ к использованию магнетизма в качестве элемента для генерации сигнала заключается в том, что на него не влияют очень сложные условия, включая пыль, влажность, экстремальные температуры и удары.
Как работают магнитные поворотные энкодеры?
Оптический энкодер использует свет (оптику) для определения уникальных положений энкодера. Магнитный энкодер использует тот же принцип для определения положения, что и оптический энкодер, но делает это с использованием магнитных полей, а не света. Существует 3 основных типа магнитных энкодеров:
Магнитный датчик зубчатой передачи или датчик
Простейшая форма магнитного энкодера представляет собой поворотный датчик с переменным магнитным сопротивлением или магнитный датчик, который состоит из магнитного датчика и ферромагнитной шестерни с зубьями.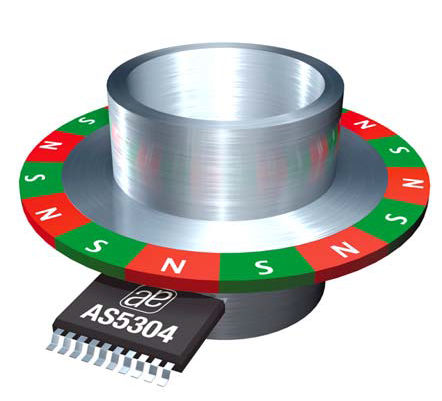 Когда зубья проходят мимо датчика, изменяющееся магнитное поле генерирует импульс напряжения, который можно преобразовать в скорость.
Когда зубья проходят мимо датчика, изменяющееся магнитное поле генерирует импульс напряжения, который можно преобразовать в скорость.
Несмотря на то, что этот тип магнитного поворотного энкодера прост и доступен по цене, выходное разрешение механически ограничено количеством зубьев шестерни, ограничивая обычное разрешение до 120 или 240 импульсов на оборот (PPR).
Магниторезистивный энкодер
Магниторезистивный датчик состоит из массива узорчатых тонкопленочных резисторов, закрепленных вдоль колеса или кольца с чередующимися магнитными доменами. Когда колесо вращается, домены проходят мимо массива датчиков, и выходное сопротивление изменяется, что создает синусоидальный сигнал.
Магниторезистивные энкодеры могут достигать значительно более высокого разрешения по сравнению с магнитными энкодерами с переменным магнитным сопротивлением. Однако магниторезистивные датчики представляют собой дискретные датчики, обычно они крупнее и их сложно интегрировать, что увеличивает стоимость и сложность.
Магнитные энкодеры на эффекте Холла
Датчик на эффекте Холла состоит из слоя полупроводникового материала, подключенного к источнику питания. Когда магнитный домен на колесе или кольце проходит мимо датчика Холла, взаимодействие генерирует всплеск напряжения. Амплитуда и частота магнитного возмущения могут быть использованы для определения скорости и перемещения.
Магнитные энкодеры на эффекте Холла объединяют датчик и процессор в один и тот же чип и поэтому намного компактнее, чем магниторезистивные энкодеры. Они предлагают более высокое разрешение и могут быть изготовлены в виде массива для распределения сбора данных по нескольким детекторам, усреднения ошибок и повышения чувствительности.
Узнайте больше о энкодерах на эффекте Холла здесь
Для чего используются магнитные энкодеры?
Магнитный энкодер предназначен для вывода надежной цифровой обратной связи в самых требовательных и суровых условиях эксплуатации. В отличие от оптических энкодеров, в которых оптический кодовый диск может быть загрязнен грязью или влагой, магнитные энкодеры используют в качестве метода обнаружения изменения в магнитных полях, что делает их гораздо более надежными в загрязненной среде.