Что такое робот-манипулятор и как он работает. Какие виды роботов-манипуляторов существуют. Где применяются роботы-манипуляторы в промышленности. Каковы преимущества использования роботов-манипуляторов. Как выбрать подходящий робот-манипулятор для предприятия.
Что такое робот-манипулятор и его основные характеристики
Робот-манипулятор — это автоматическое устройство, состоящее из манипулятора с несколькими степенями подвижности и перепрограммируемого устройства управления для выполнения двигательных и управляющих функций в производственном процессе. Основные характеристики роботов-манипуляторов:
- Количество степеней свободы (обычно от 4 до 6)
- Грузоподъемность (от нескольких кг до тонн)
- Рабочая зона (радиус действия манипулятора)
- Точность позиционирования
- Скорость перемещения
- Тип привода (электрический, гидравлический, пневматический)
Виды роботов-манипуляторов по конструкции и назначению
Существует несколько основных видов роботов-манипуляторов:

По типу кинематической схемы:
- Декартовые (линейные перемещения по осям X, Y, Z)
- Цилиндрические (вращение вокруг вертикальной оси + линейные перемещения)
- Сферические (вращение вокруг 2-х осей + линейное перемещение)
- Ангулярные/шарнирные (несколько вращательных сочленений)
По назначению:
- Универсальные промышленные роботы
- Сборочные роботы
- Сварочные роботы
- Паллетайзеры
- Покрасочные роботы
- Фрезерные роботы
Основные производители роботов-манипуляторов
На рынке промышленной робототехники выделяются следующие крупные производители роботов-манипуляторов:
- KUKA (Германия)
- FANUC (Япония)
- ABB (Швейцария)
- Yaskawa (Япония)
- Kawasaki Robotics (Япония)
- Universal Robots (Дания)
Каждый производитель предлагает широкую линейку моделей с различными техническими характеристиками под разные задачи автоматизации.
Применение роботов-манипуляторов в промышленности
Роботы-манипуляторы нашли широкое применение в различных отраслях промышленности:
Автомобилестроение:
- Сварка кузовов
- Покраска автомобилей
- Сборка узлов и агрегатов
Машиностроение:
- Обслуживание станков с ЧПУ
- Фрезерная и токарная обработка
- Сборка изделий
Электроника:
- Монтаж электронных компонентов
- Тестирование устройств
- Упаковка готовой продукции
Пищевая промышленность:
- Фасовка и упаковка продуктов
- Паллетирование
- Сортировка
Преимущества использования роботов-манипуляторов
Внедрение роботов-манипуляторов в производство дает ряд важных преимуществ:
- Повышение производительности и скорости работы
- Улучшение качества и стабильности процессов
- Возможность работы 24/7 без перерывов
- Снижение влияния человеческого фактора
- Повышение безопасности производства
- Экономия на оплате труда в долгосрочной перспективе
Как выбрать подходящий робот-манипулятор
При выборе робота-манипулятора для предприятия следует учитывать несколько ключевых факторов:
- Тип и сложность выполняемых операций
- Требуемая грузоподъемность
- Необходимая рабочая зона
- Требования к точности позиционирования
- Скорость работы
- Условия эксплуатации (в т.ч. класс защиты IP)
- Возможности интеграции с другим оборудованием
- Стоимость робота и его обслуживания
Правильно подобранный робот-манипулятор позволит максимально эффективно решить задачи автоматизации на конкретном производстве.
Программирование и управление роботами-манипуляторами
Современные роботы-манипуляторы программируются и управляются несколькими способами:
- Программирование на специализированных языках (например, KRL для роботов KUKA)
- Обучение методом перемещения (lead-through programming)
- Оффлайн-программирование в CAD/CAM системах
- Управление через промышленные ПЛК
- Использование готовых программных модулей для типовых задач
Большинство производителей предлагают удобные графические интерфейсы для программирования своих роботов, не требующие глубоких знаний в области программирования.

Коллаборативные роботы-манипуляторы
Отдельным классом являются коллаборативные роботы (коботы), разработанные для безопасной совместной работы с людьми. Их ключевые особенности:
- Датчики столкновений для немедленной остановки при контакте
- Ограниченная мощность и скорость движений
- Закругленные формы без острых углов
- Простота программирования и переналадки
- Мобильность и легкость перемещения
Коботы позволяют автоматизировать операции, где требуется тесное взаимодействие робота и человека.
Робот-манипулятор: роботизированный
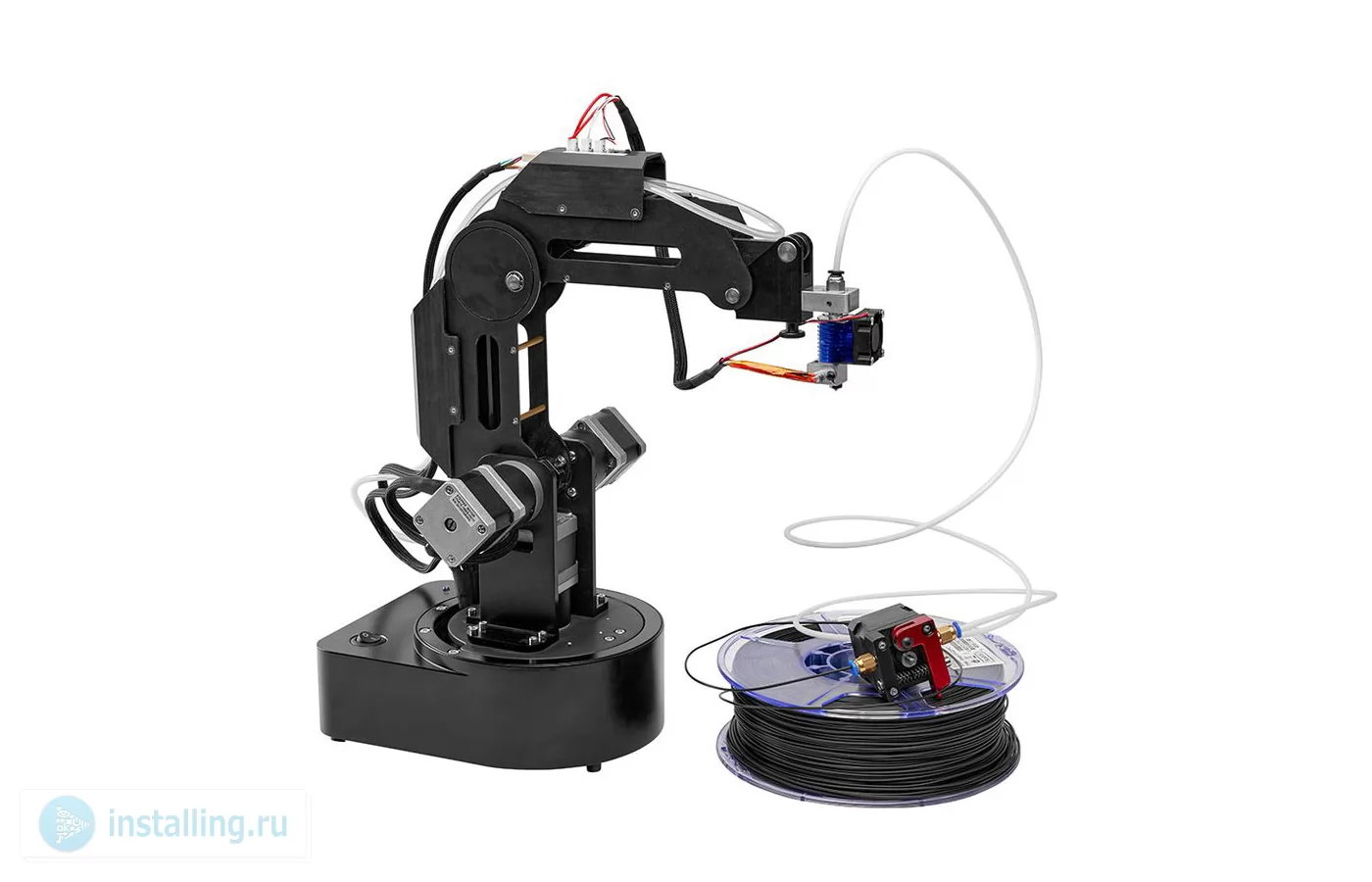
Роботы-манипуляторы – высокотехнологичные приборы, созданные, чтобы перемещать, вращать или иным образом воздействовать на объект путем выполнения тех или иных операций. Такие устройства были созданы, чтобы заменить монотонный, опасный или сложный технический человеческий труд.
Что такое роботы манипуляторы: назначение
Роботами-манипуляторами называют промышленные устройства, основной функционал которых имеет параметры с руками человека. Такие манипуляторы могут быть как автономными устройствами, так и входить в состав сложнейшего роботизированного комплекса. Фрагментарные части манипуляторов отличаются наличием узлов, которые делают возможными вращательные или поступательные движения.
Основной силой, которая приводит к развитию сферы робототехники, является потребность промышленности в сокращении затрат. Применение роботов-манипуляторов позволяет существенно снизить количество ошибок, допущенных в ходе производства, сократить количество произведенного брака, нецелесообразные потери сырья и числа травм среди персонала. Также применение робототехники позволяет сделать предприятие более гибким в вопросе применяемых технологий, улучшить условия труда работников и поднять безопасность в цехах на новый уровень.
Также применение робототехники позволяет сделать предприятие более гибким в вопросе применяемых технологий, улучшить условия труда работников и поднять безопасность в цехах на новый уровень.
Виды роботизированных манипуляторов
Единой классификации среди существующих роботов-манипуляторов на сегодняшний день нет. Устройства группируются по их технологическому назначению, конструктивным особенностям и другим параметрам.
По типу монтажа роботизированного оборудования
Мобильные
Приборы этого типа не имеют привязки к конкретному месту установки и предназначены для выполнения задач в любой точке производства или за его пределами. Они могут иметь разные источники питания – автономные или постоянные, разные условия, в которых допустимо их применение – для любой погоды, в воде, жестких или опасных условиях, например, разминирования и др. Мобильные устройства отличаются сравнительно небольшой массой и размерами, занимают мало места при транспортировке, а их возможности позволяют успешно преодолевать препятствия, возникающие на их пути.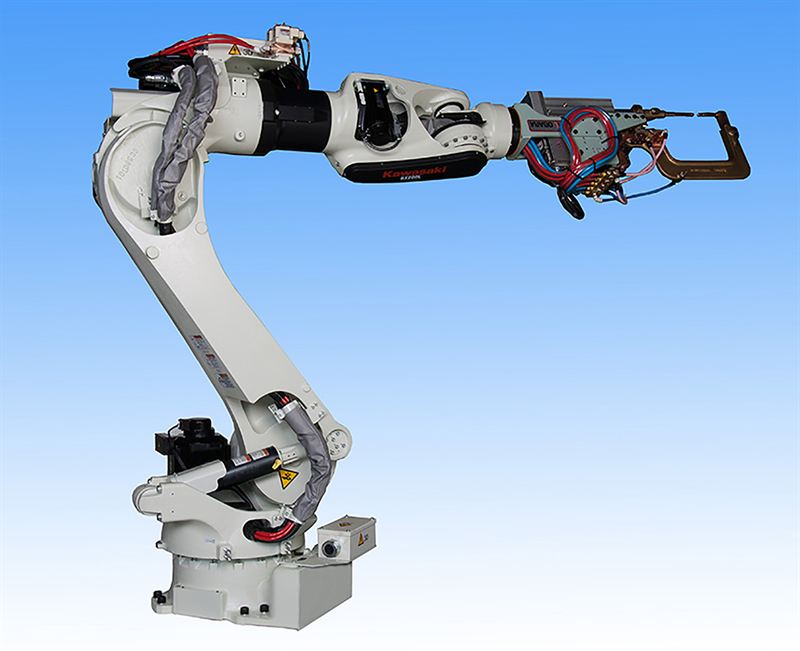 Нередко мобильные манипуляторы имеют блоки, отвечающие за наличие искусственного интеллекта. Недостатками являются высокая цена и небольшую полезную нагрузку (за редким исключением).
Нередко мобильные манипуляторы имеют блоки, отвечающие за наличие искусственного интеллекта. Недостатками являются высокая цена и небольшую полезную нагрузку (за редким исключением).
Стационарные
Самые распространенные роботы-манипуляторы. Могут отличаться в зависимости от выбранного типа крепления (напольный, потолочный, настенный). Основной характеристикой является повышенная грузоподъемность и широкий радиус действия.
Горизонтальные
Их длина может достигать нескольких десятков метров. Применяются в тех случаях, когда необходимо единовременное обслуживание нескольких участков.
Вертикальные — используются в условиях ограниченного пространства.
По типу применения
- Автономные роботы-манипуляторы (программируемые).
Такие манипуляторы могут быть расположены максимально близко от объектов, которые должны быть обработаны, и прочими роботизированными устройствами. Это позволяет планировать гибкие линии производства и максимально плотно использовать рабочую площадь помещений.
- Автономный робот-манипулятор с колесами всенаправленного движения.
Роботы, оснащенные колесами всенаправленного движения, могут перемещаться самостоятельно в любом выбранном направлении. Это позволяет применять устройства в условиях, куда невозможен доступ человека по тем или иным причинам.
- С ручным управлением.
Роботы-манипуляторы, которые управляются вручную, позволяют создать максимально точные детали.
- Коллаборативные.
Коллаборативные манипуляторы или коботы – роботизированная техника, которая предназначена для успешного взаимодействия с работниками в общем производственном пространстве. К таким приборам применимы максимально жесткие требования по безопасности конструкций и программному обеспечению, которые призваны исключить возможность нанесения травм сотрудникам.
По типу выполняемых функций
- Сборочные роботы-манипуляторы (сборка/разборка). Такая техника применяется во время промышленной сборки изделий любых размеров.
 Во время работы с деталями больших размеров вывод человеческого труда за рамки процесса позволяет ускорить производственный процесс и сократить область применения больших грузоподъемных устройств. В процессе производства мелких деталей увеличивается не только скорость, но и точность, а также качество работы.
Во время работы с деталями больших размеров вывод человеческого труда за рамки процесса позволяет ускорить производственный процесс и сократить область применения больших грузоподъемных устройств. В процессе производства мелких деталей увеличивается не только скорость, но и точность, а также качество работы. - Пайка и сварка. Сварочные работы, которые выполняются с помощью роботов, позволяют обеспечивать высочайшее качество сварных швов и стабильность имеющихся дуг. Также отличительной чертой является высокие скорости сварных работ и применение крайне низкого тока, что невозможно при ручной аппаратной сварке. Роботы-манипуляторы, предназначенные для выполнения сварных работ, часто дополнительно оборудуются вращающимся столом, который позволяет выполнять действия в любом положении.
- Обработка материалов. Применение манипуляторов в этой сфере позволяет получить идеально гладкие поверхности, сопровождая процесс обработки укреплением стенок металла и повышения его твердости более чем на 30 % за счет холодной ковки.
 Автоматизированный процесс позволяет полностью исключить ручной труд по шлифовке и полировки деталей.
Автоматизированный процесс позволяет полностью исключить ручной труд по шлифовке и полировки деталей. - Очистка, покраска, дозирование. Приборы используются для очистки поверхностей струями воды, подающимися под большим давлением, пескоструйной обработке или нанесения новых лакокрасочных слоев на готовые изделия. Один оператор при этом может успешно управлять сразу всем робототехническим комплексом.
- Резка и обработка. Процедура, сопровождающаяся травмами для живых работников, полностью безопасна для роботизированной техники. Помимо этого, манипуляторы могут производить операции по резке и обработке материала с максимально возможной точностью, снизив при этом до минимума потерю материала и сократив врем, затраченное на обработку.
- Строительные. Роботы-манипуляторы, применяемые в области строительства, способны возводить объекты с максимально возможной скоростью, предельно точно соблюдая заложенный программой план. Кроме того, машины могут работать и днем, и ночью, не завися от погодных условий и технологических особенностей производственного процесса.
- Прочие. Роботы-манипуляторы используются во всех сферах жизни человека, от военных операций по разминированию, до высокотехнологичных операций, связанных с медициной.
По типу привода
- Гидравлические роботы-манипуляторы. Используются в тех случаях, когда требуется работать с грузами, масса которых превышает 100 кг. Роботы этого типа оснащаются двигателями, в которых для приведения исполнительного органа в движение используется жидкость. Принцип работы заключается в наличии насоса, создающего давление рабочей жидкости в напорной магистрали, соединенной непосредственно с двигателем прибора. Он предназначен для преобразования давления жидкости в механическое. Такие манипуляторы чаще всего используются в тяжелой промышленности и автомобилестроении. Их преимуществами являются сравнительно небольшие размеры и вес установки, высокая производительность и возможность равномерного регулирования силы воздействия.
- Электрические. Могут быть разделены в зависимости от типа двигателя: синхронные и асинхронные; шаговые, а также серводвигатели.
 Манипуляторы приводятся в движение электрическим током и обладают большой производительностью и точностью операций.
Манипуляторы приводятся в движение электрическим током и обладают большой производительностью и точностью операций. - Пневматические. Рабочий инструмент приводится в движение через энергию, получаемую из сжатого воздуха. Основным компонентом системы является компрессор, который накачивает воздух в пневмолинии. Отсутствие вязкой среды позволяет применять приборы этого типа там, где требуется высокая скорость вращения пневмомотора. Обладают сравнительно более низкой производительностью, но гораздо менее чувствительны к воздействию внешних факторов.
По полезной нагрузке
- 0–20 кг. Роботы этого типа компактны, обладают высокой скоростью и точностью при небольшой грузоподъемности и маленькой рабочей зоне. Нередко используются в «чистых помещениях».
- 20–80 кг. Отличаются высокой производительностью и универсальностью в вопросах области применения. Такие манипуляторы оптимизированы для исполнения многократно повторяющихся быстрых операций. Роботы этого типа могут создавать компактные производственные цеха с повышенными показателями плотности в вопросе монтажа устройств при высоком качестве исполнения операций.

- 80–300 кг. Используются в сложных условиях производства. Отличаются высокой износостойкостью, высокой надежностью, а также простотой в вопросах настройки и управления.
- 300–1000 кг. Предназначены для использования в тяжелых условиях. Часто используются в автомобилестроении для поворачивания автомобильных кузовов, операций в кузнечных или литейных цехах.
- 1000–3000 кг. Могут легко манипулировать грузами с самой большой массой. Применяются на погрузо-разгрузочных работах благодаря своим возможностям с высокой точностью перемещать самые тяжелые грузы.
Области применения роботов-манипуляторов
Развитие современных технологий достигло небывалых высот, а роботы повсеместно заменяют человека. Они способны выполнять управляющие и двигательные функции на самых сложных участках производственного процесса. Каждый робот-манипулятор способен успешно заменить собой несколько десятков специалистов.
На сегодняшний день манипуляторы успешно применяются в следующих сферах:
- Строительная отрасль.

- Расфасовка и упаковка готовой продукции.
- Производства пищевых продуктов.
- Строительство автомобилей.
- Обработка деталей.
- Литейное производство.
- Транспортировка готовой продукции.
- Химическая промышленность.
- Производство крупногабаритной мебели.
- Обработка материалов и др.
Перспектива применения и преимущества
Робототехника из года в год становится все более доступной, в том числе и за счет стремительной автоматизации работы предприятий. Себестоимость устройств снижается (за последнее десятилетие их цена в среднем уменьшилась на 30 %), а эксперты в области промышленного производства делают прогнозы, что в ближайшее время их стоимость упадет еще не менее чем на 20 %. Также стоит отметить, что применение роботов-манипуляторов все чаще отмечается не только в крупных производственных концернах, но и в мелкой промышленности.
Применение современной робототехники в промышленности позволяет увеличить производственные мощности предприятий и их рентабельность, при этом существенно сократив затраты на возможный брак, обслуживание другой техники и повысив безопасность производства. Роботы-манипуляторы успешно применяются в самых разных отраслях экономики, позволяя снизить себестоимость продукции без снижения ее качества.
Роботы-манипуляторы успешно применяются в самых разных отраслях экономики, позволяя снизить себестоимость продукции без снижения ее качества.
- 18 декабря 2020
- 11801
Получите консультацию специалиста
Обзор роботов-манипуляторов Universal Robots / Хабр
Здравствуйте! Рассказываем о линейке коллаборативных роботов-манипуляторов Universal Robots.
Компания Юниверсал-роботс родом из Дании, занимается выпуском коллаборативных роботов-манипуляторов для автоматизации циклических производственных процессов. В этой статье приведем их основные технические характеристики и рассмотрим области применения.
Что это?
Продукция компании представлена линейкой из трех облегченных промышленных манипуляционных устройств с разомкнутой кинематической цепью: UR3, UR5, UR10.
Все модели имеют 6 степеней подвижности: 3 переносные и 3 ориентирующие. Устройства от Юниверсал-роботс производят только угловые перемещения.
Устройства от Юниверсал-роботс производят только угловые перемещения.
Роботы-манипуляторы разделены на классы, в зависимости от предельно допустимой полезной нагрузки. Другими отличиями являются — радиус рабочей зоны, вес и диаметр основания.
Характеристики:
Чем интересны
Простота программирования
Специально разработанная и запатентованная технология программирования позволяет операторам, не владеющим специальными навыками, быстро выполнить настройку роботов-манипуляторов UR и управлять ими с помощью интуитивной технологии 3D-визуализации.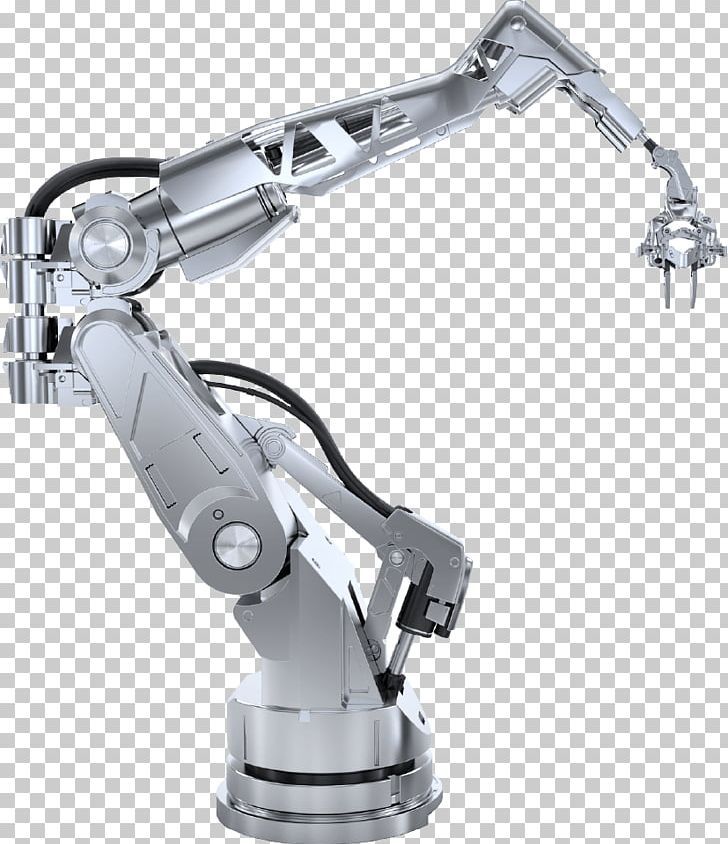 Программирование происходит путем серии простых передвижений рабочего органа манипулятора в необходимые положения, либо нажатием стрелок в специальной программе на планшете.
Программирование происходит путем серии простых передвижений рабочего органа манипулятора в необходимые положения, либо нажатием стрелок в специальной программе на планшете.
UR3:
UR5:UR10:
Быстрая настройка
Оператору, выполняющему первичный запуск оборудования, потребуется менее часа для распаковки, монтажа и программирования первой простой операции.
UR3:
UR5:
UR10:
Коллаборативность и безопасность
Манипуляторы UR способны заменить операторов, выполняющих рутинные задачи в опасных и загрязненных условиях. В системе управления ведется учет внешних возмущающих воздействий, оказываемых на робот-манипулятор в процессе работы. Благодаря этому, манипуляционные системы UR можно эксплуатировать без защитных ограждений, рядом с рабочими местами персонала. Системы безопасности роботов одобрены и сертифицированы TÜV – Союзом работников технического надзора Германии.
Системы безопасности роботов одобрены и сертифицированы TÜV – Союзом работников технического надзора Германии.
UR3:
UR5:
UR10:
Многообразие рабочих органов
На конце промышленных манипуляторов UR предусмотрено стандартизированное крепление для установки специальных рабочих органов. Между рабочим органом и конечным звеном манипулятора можно установить дополнительные модули силомоментных сенсоров или камер.
Возможности применения
С промышленными роботами-манипуляторами UR открываются возможности автоматизации практически всех циклических рутинных процессов. Устройства компании Юниверсал-роботс отлично зарекомендовали себя в различных областях применения.
Перекладка
Установка манипуляторов UR на участках перекладки и упаковки позволяет увеличить точность и уменьшить усадку.
Полировка, буферовка, шлифовка
Встроенная система датчиков позволяет контролировать точность и равномерность прикладываемого усилия на криволинейных и неровных поверхностях.
Литье под давлением
Высокая точность повторяющихся движений позволяет применять роботы UR для задач переработки полимеров и инжекционного литья.
Обслуживание станков с ЧПУ
Класс защиты оболочки обеспечивает возможность установки манипуляционных систем для совместной работы со станками ЧПУ.
Упаковка и штабелирование
Традиционные технологии автоматизации отличаются громоздкостью и дороговизной. Легко настраиваемые роботы UR способны работать без защитных экранов рядом с сотрудниками или без них 24 часа в сутки, обеспечиваю высокую точность и производительность.
Контроль качества
Роботизированный манипулятор с видеокамерами пригоден для проведения трехмерных измерений, что является дополнительной гарантией качества выпускаемой продукции.
Сборка
Простое устройство крепления рабочего органа позволяет оснащать роботы UR подходящими вспомогательными механизмами, необходимыми для сборки деталей из дерева, пластика, металла и других материалов.
Свинчивание
Система управления позволяет контролировать развиваемый момент во избегании избыточной затяжки и обеспечения требуемого натяжения.
Склеивание и <a href=»»>сварка
Высокая точность позиционирования рабочего органа позволяет сократить количество отходов при выполнении операций склейки или нанесения веществ.
Промышленные роботы-манипуляторы UR могут выполнять различные типы сварки: дуговую, точечную, ультразвуковую и плазменную.
Итого:
Промышленные манипуляторы от Юниверсал-роботс компактны, легки, просты в освоении и обращении. Роботы UR – гибкое решение для широкого круга задач. Манипуляторы можно запрограммировать на любые действия присущие движениям человеческой руки, а вращательные движения им удаются намного лучше. Манипуляторам не свойственны усталость и боязнь получить травму, не нужны перерывы и выходные.
Решения от Юниверсал-роботс позволяют автоматизировать любой рутинный процесс, что увеличивает скорость и качество производства.
Обсудите задачи автоматизации производственных процессов с помощью манипуляторов от Юниверсал-роботс с официальным дилером — в Top 3D Shop.
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:
Подписывайтесь на наш телеграм-канал с отборными кейсами роботизации и автоматизации со всего мира: https://tglink.ru/easy_robotics
Robotic Arms
Главная > Robotic Arms
Манипуляторы Interbotix X-Series предназначены для обучения и исследований с поддержкой ROS + ROS2 (Melodic, Noetic и Galactic), Moveit, Gazebo и MATLAB®, а также демо и обучающие видеоролики, которые помогут вам начать работу с вашей платформой менее чем за час. Серия X предлагает на выбор множество различных моделей с вариантами 4, 5 и 6 степеней свободы и полезной нагрузкой от 50 до 750 г. Все руки серии X работают в одном и том же центральном репозитории с открытым исходным кодом. Эти платформы идеально подходят для использования в классе и для таких приложений, как выбор и размещение на основе технического зрения, машинное обучение и искусственный интеллект.
Серия X предлагает на выбор множество различных моделей с вариантами 4, 5 и 6 степеней свободы и полезной нагрузкой от 50 до 750 г. Все руки серии X работают в одном и том же центральном репозитории с открытым исходным кодом. Эти платформы идеально подходят для использования в классе и для таких приложений, как выбор и размещение на основе технического зрения, машинное обучение и искусственный интеллект.
Робот-манипулятор ViperX 300, 6 степеней свободы
Цена: $5 695,95
Робот-манипулятор ViperX 300
Цена: 4895,95 долларов США
Робот-манипулятор ViperX 250
Цена: 4 295,95 долларов США
Робот-манипулятор WidowX 250, 6 степеней свободы
Цена: 3295,95 долларов США
Робот-манипулятор WidowX 250
Цена: 2895,95 долларов США
Рука робота WidowX 200
Цена: 2595,95 долларов США
Робот-манипулятор ReactorX 200
Цена: 1949,95 долларов США
Робот-манипулятор ReactorX 150
Цена: 1549,95 долларов США
Робот-манипулятор PincherX 150
Цена: $1049,95
Рука робота PincherX 100
Цена: $649,95
Мобильный робот-манипулятор WidowX 250, 6 степеней свободы
Цена: $3249,95
Interbotix ROS Arm Vision Kit
Цена: $379,95
Серия высокоточных 6-осевых коботов DOBOT CR с полезной нагрузкой до 16 кг. идеальный
для сред, где люди находятся поблизости, со встроенным обнаружением и предотвращением столкновений. Серия CR это
также предназначен для гораздо более простого развертывания. Физически позируйте и фиксируйте движения одним прикосновением
кнопку и записывать последовательности движений без каких-либо знаний в области программирования. Потенциал для многих различных
конечные эффекты делают серию CR универсальной платформой автоматизации. Интерфейсы визуального программирования также делают
Настройка автоматизации доступна для тех, у кого нет опыта программирования.
идеальный
для сред, где люди находятся поблизости, со встроенным обнаружением и предотвращением столкновений. Серия CR это
также предназначен для гораздо более простого развертывания. Физически позируйте и фиксируйте движения одним прикосновением
кнопку и записывать последовательности движений без каких-либо знаний в области программирования. Потенциал для многих различных
конечные эффекты делают серию CR универсальной платформой автоматизации. Интерфейсы визуального программирования также делают
Настройка автоматизации доступна для тех, у кого нет опыта программирования.
Коллаборативный робот DOBOT CR серии CR3
Цена: $19 990,00
Коллаборативный робот DOBOT CR серии CR5
Цена: $22 990,00
Коллаборативный робот DOBOT CR серии CR10
Цена: $31 990,00
Коллаборативный робот DOBOT CR серии CR16
Цена: $34 990,00
Промышленный настольный робот DOBOT MG400
Цена: $2,699. 00
00
Захваты и концевые рабочие органы, предназначенные для работы с новейшими коботами, представленными на рынке, отличаются высокой точностью с точностью до миллиметра и доступны в широком ассортименте опций. Стандартные протоколы включают Modbus, RTU (RS485), цифровой ввод-вывод, TCP/IP, USB 2.0, CAN 2.0, PROFINET и EtherCAT. Если вы ищете что-то более индивидуальное, сообщите нам об этом, и мы поможем найти правильный конечный эффектор для вашего проекта.
Захват для пальцев RG2
Цена: 4 963,00 долларов США
Захват для пальцев RG6
Цена: $5945,00
Захват пальцев RG2-FT
Цена: $10 317,00
2FG7 Захват для пальцев
Цена: 4 201,00 долл.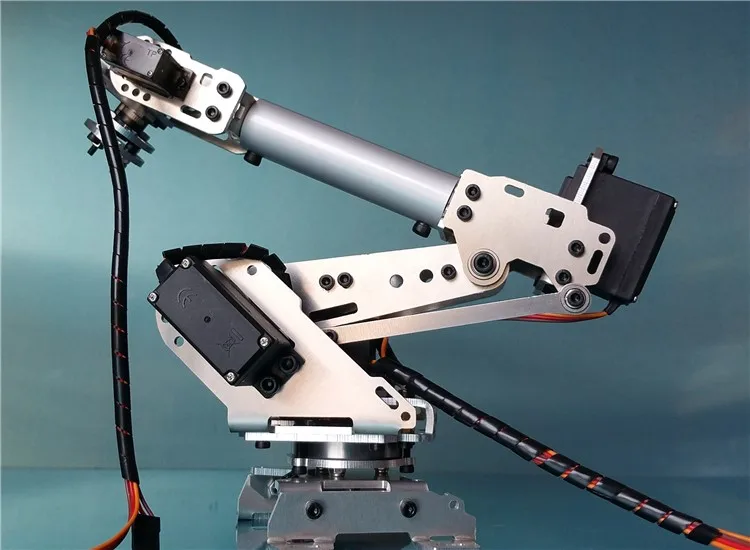 США
США
2FGP20 Захват паллетизатора
Цена: $11 589,00
Магнитный захват MG10
Цена: $2780,00
Gecko Single Pad Gripper
Цена: $773,00
3FG15 Захват для пальцев
Цена: $5 231,00
Вакуумный захват VG10
Цена: $5 462,00
Вакуумный захват VGC10
Цена: $3 364,00
Вакуумный захват VGP20
Цена: $6009,00
Мягкий захват
Цена: $4916,00
OnRobot Eyes
Цена: $6 519,00
Отвертка OnRobot
Цена: $7753,00
OnRobot Sander
Цена: $3557,00
Роботизированный лифт LIFT100
Цена: $14 663,00
Устройство быстрой смены
Цена: $1138,00
Устройство двойной быстрой замены
Цена: 2 522,00 долл.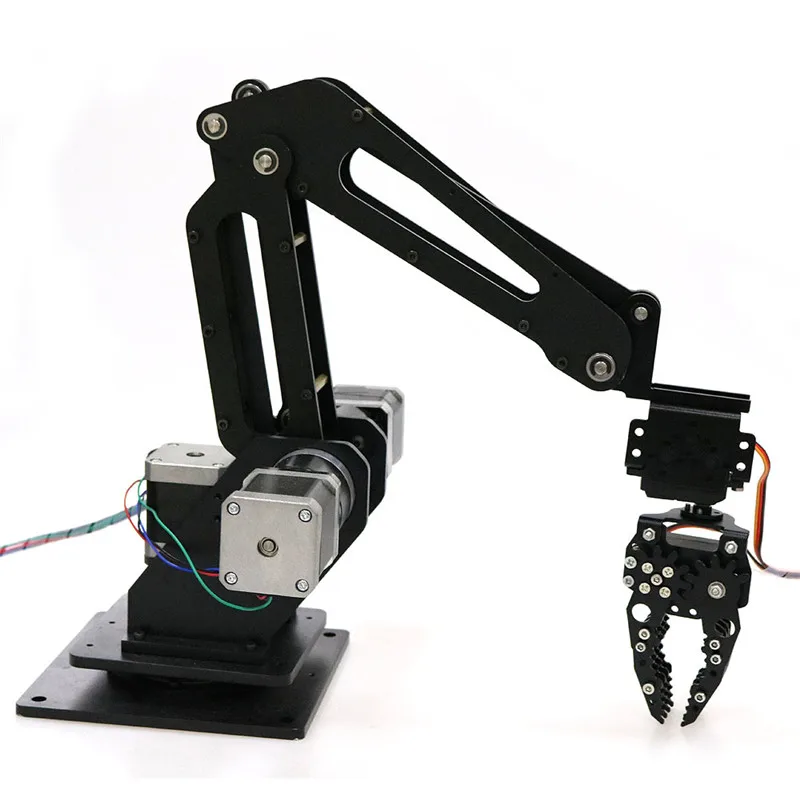 США
США
Адаптивный параллельный захват AG-145
Цена: 4099,95 долларов США
Адаптивный параллельный захват AG-95
Цена: $3899,95
Параллельный захват PGC 140 для совместной работы
Цена: 2 599,95 долл. США
Параллельный захват для совместной работы PGC 300
Цена: 3 299,95 долл. США
Параллельный захват для совместной работы PGC 50
Цена: 2399,95 долларов США
PGE-15 Тонкий параллельный захват
Цена: $849,95
Тонкий параллельный захват PGE-5
Цена: $849,95
Тонкий параллельный захват PGE-50
Цена: $849,95
Тонкий параллельный захват PGE-8
Цена: $849,95
Роторный захват для коботов RGI-14
Цена: 2349,95 долларов США
Роторный захват для коботов RGI-30
Цена: 2 499,95 долларов США
Конечные эффекторы и захваты для коботов
Главная > Роботы-манипуляторы > Промышленные рабочие органы
Захваты и рабочие органы, предназначенные для работы с новейшими коботами, представленными на рынке, отличаются высокой точностью с точностью до миллиметра и доступны в широком ассортименте вариантов.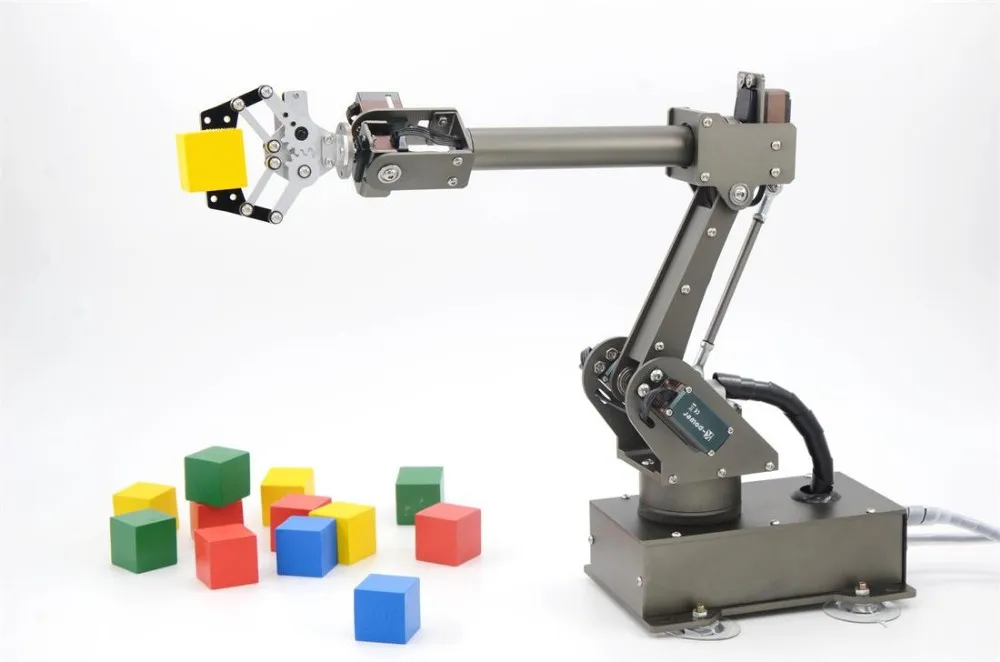 Стандартные протоколы включают Modbus, RTU (RS485), цифровой ввод-вывод, TCP/IP, USB 2.0, CAN 2.0, PROFINET и EtherCAT. Если вы ищете что-то более индивидуальное, сообщите нам об этом, и мы поможем найти правильный конечный эффектор для вашего проекта.
Стандартные протоколы включают Modbus, RTU (RS485), цифровой ввод-вывод, TCP/IP, USB 2.0, CAN 2.0, PROFINET и EtherCAT. Если вы ищете что-то более индивидуальное, сообщите нам об этом, и мы поможем найти правильный конечный эффектор для вашего проекта.
Захват для пальцев RG2
Цена: 4 963,00 долл. США
Захват для пальцев RG6
Цена: $5945,00
Захват для пальцев RG2-FT
Цена: $10 317,00
2FG7 Захват для пальцев
Цена: $4 201,00
2FGP20 Захват паллетизатора
Цена: $11 589,00
Магнитный захват MG10
Цена: $2780,00
Односторонний захват Gecko
Цена: $773,00
3FG15 Захват для пальцев
Цена: $5 231,00
Вакуумный захват VG10
Цена: $5 462,00
Вакуумный захват VGC10
Цена: $3 364,00
Вакуумный захват VGP20
Цена: $6009,00
Мягкий захват
Цена: $4916,00
OnRobot Eyes
Цена: 6 519,00 долларов США
Отвертка OnRobot
Цена: $7753,00
OnRobot Sander
Цена: $3557,00
Роботизированный лифт LIFT100
Цена: $14 663,00
Устройство быстрой смены
Цена: $1138,00
Двойной быстросменный блок
Цена: 2 522,00 долл.
