Как работает импульсный металлоискатель на микроконтроллере. Какие преимущества у цифровых металлодетекторов. Как собрать простой металлоискатель своими руками. На каком принципе основана работа современных металлоискателей.
Принцип работы импульсного металлоискателя
Импульсный металлоискатель работает по следующему принципу:
- В поисковую катушку подается короткий импульс тока, создающий магнитное поле
- После окончания импульса магнитное поле начинает затухать
- Если рядом находится металлический предмет, он создает вихревые токи, замедляющие затухание поля
- Микроконтроллер анализирует скорость затухания поля и определяет наличие металла
Такой принцип позволяет эффективно обнаруживать металлические предметы на большой глубине. Импульсные металлоискатели менее чувствительны к минерализации почвы по сравнению с другими типами.
Преимущества цифровых металлодетекторов
Использование микроконтроллера в конструкции металлоискателя дает ряд преимуществ:
- Высокая точность измерений и обработки сигнала
- Возможность реализации сложных алгоритмов фильтрации помех
- Компактность и низкое энергопотребление
- Простота настройки и калибровки
- Расширенные функции индикации и управления
Цифровая обработка сигнала позволяет создавать более совершенные и функциональные металлодетекторы по сравнению с аналоговыми схемами.
Основные компоненты импульсного металлоискателя
В состав импульсного металлоискателя на микроконтроллере входят следующие ключевые компоненты:
- Микроконтроллер (например, ATmega8) — управляет работой устройства
- Поисковая катушка — создает магнитное поле и регистрирует его изменения
- Генератор импульсов — формирует короткие импульсы тока для катушки
- Усилитель — усиливает слабый сигнал с катушки
- АЦП — преобразует аналоговый сигнал в цифровой код
- Индикатор — отображает результаты поиска (светодиоды, дисплей)
- Элементы питания — обеспечивают автономную работу
Правильный выбор и настройка этих компонентов определяют эффективность работы металлоискателя.
Алгоритм работы микроконтроллера в металлодетекторе
Микроконтроллер в импульсном металлоискателе выполняет следующие основные функции:
- Генерирует импульсы для возбуждения поисковой катушки
- Запускает АЦП для оцифровки сигнала затухания поля
- Анализирует форму и длительность затухания сигнала
- Фильтрует помехи и выделяет полезный сигнал
- Определяет наличие металла и его тип (черный/цветной)
- Управляет индикацией результатов поиска
- Обрабатывает команды пользователя
Использование микроконтроллера позволяет реализовать сложные алгоритмы цифровой обработки сигнала для повышения чувствительности и точности обнаружения металла.
Конструкция поисковой катушки металлоискателя
Поисковая катушка — ключевой элемент металлоискателя, от которого во многом зависит эффективность поиска. Основные требования к конструкции катушки:
- Диаметр 20-30 см для оптимального баланса глубины и локализации
- Количество витков провода 100-150
- Использование провода диаметром 0.5-0.8 мм
- Жесткая и герметичная конструкция
- Наличие электростатического экрана
- Качественная изоляция обмотки
Катушку обычно изготавливают из фанеры или пластика, наматывая провод виток к витку. Готовую катушку покрывают эпоксидной смолой для защиты от влаги.
Настройка и калибровка металлоискателя
Для корректной работы импульсного металлоискателя требуется его настройка и калибровка:
- Регулировка длительности и амплитуды возбуждающего импульса
- Настройка усиления входного сигнала
- Калибровка по чистому воздуху (без металлов рядом)
- Установка порогов срабатывания для разных типов металлов
- Регулировка чувствительности под конкретные условия поиска
- Отстройка от помех (минерализация почвы, электромагнитные помехи)
Правильная настройка позволяет добиться максимальной глубины и точности обнаружения металлических предметов.
Сравнение импульсных и частотных металлоискателей
Рассмотрим основные отличия импульсных и частотных металлоискателей:
| Параметр | Импульсный | Частотный |
|---|---|---|
| Принцип работы | Анализ затухания магнитного поля | Изменение частоты генератора |
| Глубина поиска | Выше | Ниже |
| Чувствительность к минерализации | Низкая | Высокая |
| Различение металлов | Хуже | Лучше |
| Энергопотребление | Выше | Ниже |
Импульсные металлоискатели лучше подходят для поиска на сложных грунтах и большой глубине, а частотные — для точного определения типа металла.

Применение металлоискателей в различных сферах
Металлоискатели находят широкое применение в разных областях:
- Археология — поиск древних артефактов и кладов
- Строительство — обнаружение арматуры и коммуникаций
- Военное дело — разминирование территорий
- Промышленность — контроль качества изделий
- Безопасность — досмотр людей и багажа
- Геологоразведка — поиск рудных месторождений
- Поисково-спасательные работы — обнаружение людей под завалами
Развитие технологий позволяет создавать все более совершенные металлодетекторы для решения различных задач.
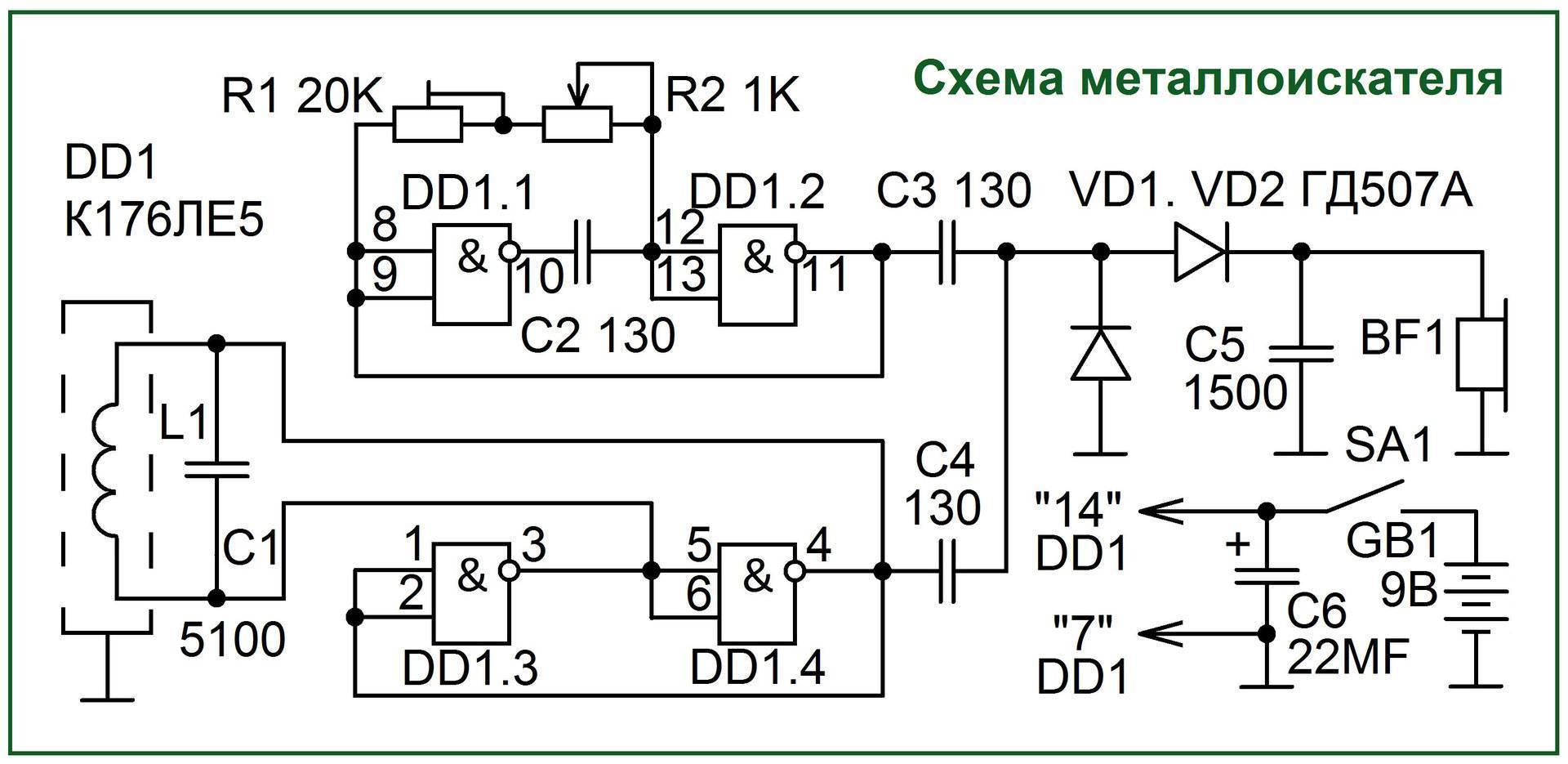
ИМПУЛЬСНЫЙ МЕТАЛЛОИСКАТЕЛЬ
Представляем новый упрощённый вариант импульсного металлодетектора ClonePI-W. Данный прибор очень прост в сборке и настройке, а некоторые функциональные особенности схемы допускают его использование для подводного поиска. Для упрощения и удешевления конструкции, вместо жидкокристаллического дисплея использована светодиодная индикация отклика от металла. Управление импульсного металлоискателя тоже максимально упрощено. Автор схемы — AndyF (fandy.vov.ru).1,2 — барьер — отстройка от грунта;
3,4 — громкость (+ и -) тут все ясно;
5 — если прошивка 1.2.1 — не используется;
6 — сброс.
Плата управления с разведёнными кнопками:
Настройка: в отсутствии металла, ставим прибор катушкой на грунт, загрубляем кнопочкой +барьер до свечения 3-4 светодиода, крутим переменный резистор до срыва (металлоискатель запоет), немного откручиваем назад — при этом писк прекратится и нажимаем сброс. Все, прибор готов к работе — идем, ищем и копаем.
Форум по импульсным металлоискателям
Форум по обсуждению материала ИМПУЛЬСНЫЙ МЕТАЛЛОИСКАТЕЛЬ
ЦИФРОВОЙ МЕТАЛЛОИСКАТЕЛЬ НА AVR МИКРОКОНТРОЛЛЕРЕ — 21 Декабря 2014 — Блог
ПРОСТОЙ ЦИФРОВОЙ МЕТАЛЛОИСКАТЕЛЬ НА AVR МИКРОКОНТРОЛЛЕРЕисточник: indikatop.ru
Начну с пред истории…Вскапывая огород, один знакомый человек нашел старинную монету 1600-сотого года. И говорит, мол «был бы металлоискатель…и т.д.» Я недолго думая и не капаясь в интернете в поисках истины начал делать свой проект, так сказать буквально на коленках. За основу взята задумка из набора Мастер КИТ, название: «Металлоискатель по принципу частотомера».
В этой статье хочу представить Вашему вниманию мой проект «Металлоискатель на микроконтроллере AVR». Данный проект несложен для самостоятельного изготовления и содержит минимум деталей для нормального функционирования устройства.
Схема простого маталлоискателя на микроконтроллере AVR показана на рисунке ниже:
Устройство имеет как звуковую индикацию обнаруживаемых предметов, так и цифровую. Принцип работы устройства заключается в подсчете периода нескольких десятков импульсов, фильтрация данного значения, проход через условности автоматической коррекции и сброса а затем вывод на дисплей. Устройство работает в динамическом и статическом режиме с возможностью переключения режимов и огрубления чувствительности в каждом из них. Метало детектор обеспечивает обнаружение по воздуху, на расстоянии от центра поисковой катушки:
* монета 1 копейка ————5см;
* монета 5 копеек ———— 10см;
* крышка от консервации — 25см;
* ведро металлическое —- ~45см;
Внешний вид цифрового металлоискателя на микроконтроллере AVR
Конструкция:
Печатная плата металлоискателя выполнена из одностороннего фольгированного стеклотекстолита методом ЛУТ (Лазерно-Утюжной технологии:). Разъем для внутрисхемного программирования я сделал прямо на плате, чтобы не изворачиваться с вытаскиванием микроконтроллера, во избежание погнутых и поломанных выводов. Транзистор КТ3102 с любым буквенным индексом, он работает в режиме ключа и коэффициент усиления неважен, так же возможна замена транзистора на другой аналогичный N-P-N. Микроконтроллер ATmega8-16Mhz можно тактировать от внутреннего RC-генератора на максимальной частоте, при этом быстродействие в динамическом режиме может заметно ухудшиться, поэтому рекомендую все-таки поставить кварцевый резонатор.
Светодиод VD1 — красный , служит для питания дисплея от 3-х вольт, хотя его можно не ставить, а подключить напрямую. Дисплей работает и от 5В, но при этом длительная работа не гарантируется. Если применить 4 пальчиковые аккумулятора с суммарным напряжением 4,8В , то стабилизатор 78L05 можно не ставить, конденсатор C1 естественно тоже. Конденсатор для поисковой катушки нужно использовать с малым ТКЕ, желательно поставить тантал. При не подходящем конденсаторе значения на дисплее будут сильно «скакать». Я использовал конденсатор типа «зеленый приплюснутый бочонок» залитый чем-то похожим на зеленый эпоксидный клей.
Выдрал его из китайского радиоприемника (по моему). Емкость данного конденсатора не критична, рекомендуемая 0.01-0.05 мкФ , от этого зависит поисковая частота датчика. Катушку я мотал на 3-х литровой банке 80-120 витков, проводом 0,2-0,5 (тоже не критично). После намотки катушки на банку, снял и туго замотал ее скотчем для жесткости. Затем обязательно сверху намотать экран из медной или алюминиевой фольги. Намотка должна быть без просветов, с плотно прилегающими к друг-другу витками. От экрана делается отвод из медной проволоки, который припаивается затем к минусу источника питания. Конструкция поисковой катушки должна быть максимально жесткой, поэтому я свою засунул в распиленную пластиковую водопроводную трубу, и дополнительно обмотал скотчем.
Прошивка:
Фьюз-биты микроконтроллера программируются на тактирование от внешнего кварцевого резонатора.
Скачать прошивку микроконтроллера AVR для этого металло-детектора
Металлоискатель на микроконтроллере AVR — Микроконтроллеры и Технологии
Дата публикации:
.С давних пор людей привлекают приборы для поиска скрытых металлических предметов. Причины этого интереса различны. Строителей интересует расположение металлической арматуры в стенах, искатели кладов мечтают найти в развалинах старого здания кувшин с золотыми монетами, саперы разыскивают неразорвавшиеся «подарки» прошлых войн. Всех этих людей объединяет желание иметь недорогой, компактный и экономичный прибор, который поможет им обнаружить через слой земли или бетона металлические предметы и, по возможности, определить из какого металла они состоят. Если исключить экзотические методы, вроде лозоискательства и экстрасенсов, то абсолютное большинство таких приборов строится на базе электронных приборов, реагирующих на изменение металлическими предметами электромагнитного поля возбуждаемого поисковым прибором. Наиболее часто в качестве катушки возбуждения и одновременно датчика прибора используется рамочная катушка, состоящая из нескольких сотен витков медного провода и включенная в контур автогенератора. В таких приборах используется тот эффект, что при приближении металлического предмета к катушке изменяется ее индуктивность и, как следствие, частота работы автогенератора. При этом, в общем случае, ферромагнитные предметы (железо, чугун) понижают частоту, а неферромагнитные (медь, золото, алюминий) повышают частоту генерации. Регистрируя величину и знак отклонения частоты, можно сделать заключение о типе металлического предмета, попавшего в зону поиска рамки. Основные различия между большинством типов таких металлоискателей заключаются в способах регистрации изменения частоты. Далее приводится краткое описание наиболее часто используемых способов.
Частотный детектор
Один из самых простых — это прибор, работающий по принципу «срыва резонанса» (OR — Off Resonance). Принцип действия этого прибора основан на использовании частотного детектора на основе колебательного контура. См. рис. 1.
Рисунок 1. Структурная схема OR металлоискателя
Колебательный контур частотного детектора имеет резонансную частоту, близкую к частоте поискового генератора. Изменение частоты генератора приводит к изменению амплитуды сигнала на контуре, что фиксируется помощью индикатора, например стрелочного прибора. Такие приборы не нашли широкого применения. Их недостатки — необходимость обеспечения стабильной амплитуды сигнала на выходе генератора, а также необходимость подстройки резонансной частоты контура из-за влияния дестабилизирующих факторов как на контур поискового генератора, так и на контур частотного детектора.
Метод биений
Другой прибор, — это металлоискатель на биениях (BFO — Beat Frequency Oscillation). Принцип действия такого металлоискателя основан на биениях частоты эталонного генератора и частоты поискового генератора. См рис. 2.
Рисунок 2. Структурная схема BFO металлоискателя
Измерительный и эталонный генераторы настраиваются на одинаковую частоту. При изменении частоты измерительного генератора на выходе смесителя появляется сигнал разностной частоты. Оператор воспринимает этот сигнал на слух или визуально – в зависимости от конструкции. Такие приборы производятся уже несколько десятилетий. Сейчас по такому принципу строятся, в основном, недорогие металлоискатели-игрушки и любительские металлоискатели. Такие приборы имеют ряд недостатков. Первый — это наличие паразитной взаимной синхронизации обоих генераторов. Это приводит к тому, что оказывается невозможным оценить очень малую разность частот и как следствие – существенно снижается чувствительность прибора. Второй недостаток — это отсутствие селекции по типам металлов. Ферромагнитные объекты вызывают понижение частоты, а металлические неферромагнитные – повышение частоты измерительного генератора. Однако после смесителя в BFO металлоискателе информация о знаке ухода частоты теряется.
Частотный детектор на основе ФАПЧ
Следующий прибор (PLL — Phase Locked Loop) — это прибор, в котором недостаток металлоискателя на биениях используется во благо. В таком приборе оба генератора, измерительный и эталонный, работают строго на одной частоте. Причем частота измерительного генератора подстраивается под частоту эталонного генератора с помощью системы ФАПЧ. См. рис. 3.
Рисунок 3. Структурная схема PLL металлоискателя
Сигнал напряжения подстройки используется для определения величины и знака изменения частоты. Такие металлоискатели обладают селекцией по типам металлов. Существует несколько радиолюбительских конструкций такого типа. К недостаткам таких приборов можно отнести следующее — наличие «полезной» ФАПЧ не исключает наличия паразитной взаимной синхронизации обоих генераторов, как и в приборе на биениях. Это приводит к тому, что уменьшается крутизна регулировочной характеристики, и как результат уменьшается дальность обнаружения.
Цифровой частотометр
Идея использования цифрового частотомера для регистрации ухода частоты измерительного генератора не нова. Такой металлоискатель (FM — Frequency Meter см. Рис.4.) свободен от большинства недостатков, присущих предыдущим схемам. Его принцип действия заключается в следующем:
Сначала электронный частотомер оценивает частоту измерительного генератора, когда датчик находится вдали от объектов поиска. Это значение заносится в запоминающий регистр. Затем, в процессе поиска, частотомер непрерывно измеряет текущую частоту измерительного генератора. Из полученных значений вычитается значение эталонной частоты, и результат подается на устройство индикации. Очевидно, что в такой конструкции эффект паразитной взаимной синхронизации генераторов будет выражен значительно слабее – ведь теперь частота измерительного генератора (единицы-десятки килогерц) на несколько порядков ниже частоты опорного генератора (десятки мегагерц). С помощью частотомера можно измерить не только величину ухода частоты измерительного генератора, но и ее знак, следовательно, такой металлоискатель обладает селективностью по типам металлов.
Рисунок 4. Структурная схема FM металлоискателя
Однако реализация этой идеи «в лоб», не позволяет получить реальную чувствительность, большую чем в приборе на биениях. Это связано с тем, что невозможно напрямую в реальном масштабе времени (20…40 мс на один отсчет) регистрировать очень малые уходы частоты (единицы и доли герц). Нам удалось решить эту проблему следующим образом — из теории радиоизмерений известен метод «быстрого» измерения низких частот — т.н. метод обратного счета. В этом методе измеряется период сигнала, а частота вычисляется как его обратная величина. Оставалась только задача практической реализации.
Практическая конструкция металлоискателя
Очевидно, что если реализовывать такое устройство на элементах средней степени интеграции, то получится сравнительно сложный и громоздкий прибор, что для мобильного исполнения нежелательно. Выходом из этой ситуации стало применение микроконтроллера. На микроконтроллер оказалось возможно возложить не только задачу по измерению периода, но и практически все функции по обработке результатов – вычисление разности частот, звуковую и световую индикацию результатов измерений. Наш металлоискатель реализован на микроконтроллере AT90S2313-10PI производства фирмы Atmel.
Это 8-битный экономичный RISC микроконтроллер. Имеет на частоте 10 MHz производительность 10 MIPS. Содержит: 2 кБ флэш памяти, 128 байт EEPROM, 15 линий ввода/вывода, 32 рабочих регистра, два таймера/счетчика, сторожевой таймер, аналоговый компаратор, универсальный последовательный порт. Более подробно с семейством AVR микроконтроллеров можно ознакомиться на сайте производителя.
Основные технические характеристики металлоискателя
Напряжение питания: 5,5-20 В
Потребляемый ток: 15 мА
Индикация: световая — 7 светодиодов и звуковая
Режимы поиска: статический и динамический
Дискриминация: ферромагнетики/неферромагнетики
Глубина обнаружения (на воздухе):
Монета диаметром 25 мм: 11 см
«Пистолет»: 17 см
«Каска»: 37 см
Принципиальная схема
Принципиальная схема металлоискателя по принципу частотомера изображена рис.5.
Рисунок 5. Принципиальная электрическая схема металлоискателя
Измерительный генератор построен на таймере D1 NE555. Она используется в несколько необычном включении — в качестве LC генератора. Колебательный контур генератора состоит из конденсаторов C1,C2 и катушки индуктивности датчика. Резонансная частота контура определяется как
где C — это последовательное соединение конденсаторов C1 и C2. Так как микроконтроллер автоматически подстраивается под частоту измерительного генератора, в схеме не предусмотрена подстройка частоты генератора. При использовании датчика диаметром 190 мм (100 витков) и емкостях конденсаторов С1=0.047 F и C2=0.01 F частота составит около 20 кГц. При необходимости ее можно изменить, заменив конденсаторы C1, C2. При этом желательно чтобы их емкости находились в соотношении примерно (4…6): 1.
На микроконтроллер D2 возложены все остальные функции по обработке сигнала измерительного генератора вплоть до индикации. В данной схеме применен микроконтроллер AT90S2313, описанный выше. Исполнение Industrial (температурный диапазон -40C…+85C). Это сделано из соображений, чтобы прибор мог эксплуатироваться в полевых условиях при отрицательных температурах. Непосредственно к микросхеме микроконтроллера подключены как органы управления, так и органы индикации. В металлоискателе реализованы два режима работы, которые задаются при помощи переключателя S1 — статический и динамический. В статическом режиме сигнал, который представляет собой цифровой код разности частот, логарифмируется и сразу подается на индикацию. Каждый уровень световой индикации сопровождается своим тоном звуковой индикации.
Динамический режим предназначен для поиска мишеней в сложных условиях, на фоне помех от грунта, минералов и т.д. В динамическом режиме сигнал подвергается цифровой фильтрации, которая выделяет полезный сигнал на фоне мешающих сигналов. В своем приборе мы применили оптимальную согласованную фильтрацию. Вкратце ее суть заключается в том, что для любого сигнала существует оптимальный фильтр, позволяющий получить максимальный отклик на выходе фильтра. Мы реализовали такой цифровой фильтр для сигнала расстройки частоты, который возникает при движении поисковой катушки над мелкими мишенями со скоростью 0.5-1 м/c. Фильтр реализован программно.
При помощи переменного резистора R6 регулируется чувствительность прибора. Светодиоды VD1…VD3 индицируют уровень отклонения частоты измерительного генератора в случае преобладания ферромагнитного эффекта. Светодиоды VD5…VD7 – в случае преобладания эффекта проводимости. Светодиод VD4 указывает на нулевой сдвиг частоты. Наушник Y предназначен для звуковой индикации отклонения частоты сигнала измерительного генератора.
Схема содержит рекордно низкое количество деталей. При этом к ним не выдвигается особых требований. Микросхему AT90S2313-10PI можно заменить на AT90S2313-10PC, однако, в этом случае не гарантируется работа при температуре меньше 0C. (что вполне может быть в полевых условиях).
Микросхему D1 можно попробовать заменить на КР1006ВИ1. Светодиоды желательно выбирать с повышенной яркостью свечения. Стабилизатор D3 можно заменить на К1184ЕН1 или, что несколько хуже — 78L05. В последнем случае минимально допустимое напряжение батареи составит 6,7 В. К резисторам особых требований не предъявляется. Они могут иметь рассеиваемую мощность 0,125-0,25 Вт.
Конденсаторы C1 и C2 – должны иметь минимальный ТКЕ, особенно C2. К остальным конденсаторам не предъявляется особых требований.
Наушник Y (или наушники) можно взять от плеера. Возможно потребуется подобрать номинал резистора R3 для получения приемлемой громкости. В крайнем случае, наушник можно заменить на пьезоизлучатель.
Конструкция корпуса прибора может быть достаточно произвольной.
Особо следует остановиться на конструкции поисковой катушки — она может быть реализована различными способами. Основные требования к ней — жесткость конструкции, герметичность и наличие электростатического экрана. Можно предложить следующую технологию изготовления катушки:
Берется доска подходящего размера и на ней рисуется окружность диаметром 190 мм. Затем равномерно по окружности в доску забиваются небольшие гвозди — 15…20 штук. На эти гвозди наматывается 100 витков эмалированного провода диаметром 0.3 — 0.56 мм. После намотки гвозди извлекаются или подгибаются и катушка снимается с оправки. Следующий этап — обмотка катушки изолентой. Обмотка ведется внахлест. См. рис.6
Рисунок 6. Обмотка катушки липкой лентой
Аналогичным образом поверх слоя из липкой ленты наносится слой из алюминиевой фольги, служащий экраном обмотки датчика. Для этого фольга нарезается на полосы шириной около 10 мм. Для предотвращения образования короткозамкнутого витка, снижающего добротность контура, обмотка из фольги должна занимать не всю поверхность кольца обмотки датчика — от фольги оставляется свободным небольшой участок длиной 10-20 мм. Отвод от экрана выполняется луженым одножильным проводом, который закрепляют узлом поверх экрана. В завершение, кольцо обмотки датчика обматывают еще одним слоем липкой ленты по все поверхности, выпустив наружу выводы обмотки и экрана. К этим выводам подпаивается экранированный кабель, который соединяет катушку с металлоискателем. Жесткость катушке можно придать различными способами. Один из них — подобрать подходящий корпус, например, взять крышку от набора пластиковой посуды, поместить в него катушку и залить эпоксидной смолой. Предварительно необходимо проделать в корпусе отверстие и продеть в него кабель. Также на корпусе катушки необходимо предусмотреть крепление для штанги.
Вид печатной платы, расположение элементов на печатной плате и рисунок печатной платы (М1:1) приведены на рис.7, 8 и 9.
Настройка прибора
Можно предложить следующий порядок настройки прибора.
Проверить правильность монтажа схемы и подать питание.
Измерить потребляемый ток. Он должен быть не более 15 мА.
Убедиться, что на выводе 3 микросхемы D1 присутствует меандр расчетной частоты (около 20 кГц для указанных выше номиналов конденсаторов C1 и C2 и стандартного датчика)
Удалить рамку прибора подальше от металлических предметов и нажать кнопку S0 «Сброс».
Убедиться в работоспособности органов индикации, поднося к датчику различные металлические предметы.
Работа с прибором
Если переключатель S1 замкнут, то прибор переходит в статический режим. В этом режиме при приближении катушки к ферромагнитной мишени начинают последовательно загораться светодиоды VD3, VD2, VD1. Если катушку приближать к неферромагнитному металлическому объекту, то будут последовательно загораться светодиоды VD5, VD6, VD7. К сожалению таким же образом прибор реагирует на железные предметы с большой площадью поверхности (например, консервная банка). Это связано с тем, что при воздействии на поисковую катушку в металлических ферромагнитных объектах возникает сразу два эффекта — эффект проводимости и ферромагнитный эффект. При некотором соотношении площади поверхности объекта к объему начинает преобладать эффект проводимости.
При размыкании переключателя S1 прибор переходит в динамический режим. В этом режиме катушка должна перемещаться над грунтом со скоростью примерно 0.5-1 м/с. Местонахождение объекта в динамическом режиме находится методом «артиллерийской вилки» при проведении катушки над объектом дважды — слева направо и справа налево. В этом режиме важно почувствовать наименьшую скорость, с которой можно перемещать катушку. Это легко осваивается при недолгой тренировке. Индикация в динамическом режиме выглядит немного иначе. При передвижении катушки над ферромагнитным объектом сначала загораются светодиоды из «шкалы» VD5, VD6, VD7, а затем из «шкалы» VD3, VD2, VD1. При передвижении катушки над неферромагнитным объектом индикация работает наоборот.
Как уже было указано выше, каждому светодиоду соответствует свой тон звуковой индикации. После непродолжительной работы с металлоискателем запоминаются «напевы», характерные для разных типов мишеней. Это позволяет при поисках пользоваться преимущественно звуковой индикацией, что довольно удобно.
Перед началом работы в обоих режимах необходимо выставить оптимальную чувствительность прибора с помощью переменного резистора R6. Он выставляется в такое положение, когда прибор начинает индицировать ложные отклики. Затем медленно вращая ротор этого резистора, необходимо добиться исчезновения этих ложных срабатываний.
При прочих равных условиях динамический режим за счет фильтрации позволяет достичь лучшей чувствительности по сравнению со статическим режимом. Однако статический режим также бывает иногда необходим. Например, необходимо проверить дно узкой ямы. В этом случае нет возможности осуществлять горизонтальные качания поисковой катушки, которые необходимы для динамического режима. Здесь выручит статический режим.
Во время полевых испытаний металлоискатель показал неплохие результаты.
| Архив для статьи «Металлоискатель на микроконтроллере AVR» | |
| Описание: Файл прошивки микроконтроллера | |
| Размер файла: 1.52 KB Количество загрузок: 3 432 | Скачать |
Металлоискатель на микроконтроллере ATTINY2313-20 — Металоискатели — Конструкции для дома и дачи
В «Забаве» использован принцип «частотомер». Работает металлоискатель в динамическом режиме (реагирует на металл, только при движении датчика). Имеется регулировка чувствительности. Различает черные и цветные металлы.
Технические характеристики:
- Напряжение питания – 9В
- Потребляемый ток – 17-20 мА
Расстояние обнаружения (на воздухе):
- Монета диаметром 25 мм – 11-12 см
- Медная бляха (5 на 8 см) – 21см
- Алюминиевая крышка (диаметром 20 см) – 35 см
Прошивку можно скачать здесь.
Принципиальная схема металлоискателя «Забава»
Список деталей.
Микросхемы:
- IC1 — К561ЛЕ5 (CD4001A)
- IC2 — ATTINY2313-20
- IC3 — 78L05
Резисторы:
- R1 – 4.7к
- R2 – 10к
- R3 – 1к
- R4 – 1к
- R5 – 470оМ
- R6 – 1к подстроечный
- R7 – 100оМ
- R8 – 10к переменный
Конденсаторы:
- C1, C2 – 47000 пФ
- C3 – 3300 пФ
- C4, C5 – 27 пФ
- C6 – 100 мкФ на 16 В электролитический
- C7 – 470 мкФ на 16 В электролитический
- C8, C9 – 0.1 мкФ
Панелька для микроконтроллера:
- Двадцати контактная панелька.
Кварцевый резонатор:
Кнопка “RESET” (сброс):
- S1 — Любая не фиксируемая кнопка.
Выключатель питания:
Катушка L1:
- Диаметр катушки – примерно 16 сантиметров.
- Количество витков – 80.
- Диаметр провода – примерно 0.3 миллиметра.
Наушники:
- Низкоомные, для плеера.
Разъем под наушники:
- Внешний, припаивается к проводу сантиметров тридцать длинной.
Разъем для батареи:
- Разъем для батареи типа «крона».
Батарея:
- Аккумулятор или батарея типа «крона», 9 вольт.
Провод соединяющий плату и катушку – экранированный, двухжильный, длиной примерно 1 метр.
Двухсторонний, фольгированный стеклотекстолит, 50 на 75 мм.
Выключатель питания, который я использую, называется «MTS-1», но можно использовать любой подходящий.
Конденсаторы C1, C2, C3 должны быть с возможно меньшим температурным коэффициентом (ТКЕ). Про температурные коэффициенты можно посмотреть здесь (http://radiokot.ru/articles/11/).
Изготовление печатной платы в домашних условиях.
Печатную плату можно изготовить по технологии описанной по адресу: http://sdelai-sam.su/index.html#a1 Размеры печатной платы – 48мм на 75мм. Не забудьте соединить перемычкой минусовую шину и нижний экранный слой.
Здесь можно скачать печатную плату в формате программы «Dip Trace».
Зеркальное отражение рисунка платы (для печати).
Готовая плата.
Монтаж деталей.
Детали припаиваю со стороны дорожек, чтобы не сверлить отверстия. Перед монтажом, у всех деталей аккуратно отгибаю кончики выводов, для увеличения спаиваемых поверхностей и облуживаю их.
Не перегревайте выводы деталей, контакт паяльника с выводом, не более одной секунды. Это касается не только микросхем и транзисторов, но и конденсаторов, выключателя, разъема для наушников. Чтобы выводы хорошо паялись, зачистите их предварительно ножом или наждачной бумагой. Корпус кварцевого резонатора нужно «прихватить» припоем к плате или закрепить иным способом.
Разъем под наушники использую внешний, на проводе сантиметров тридцать длинной, потому, что провода у наушников часто бывают короткими. Наушники, низкоомные, для плеера. Плата и поисковая катушка соединяются двухжильным экранированным кабелем, длиной примерно один метр.
Микроконтроллер вставляется в панельку. Внимательно вставляйте микроконтроллер, если его неправильно вставить и включить питание то, скорее всего он выйдет из строя.
Пробовал ставить C1, C2 номиналом 4700пФ, в таком варианте существенно ослабевает влияние грунта, а расстояние обнаружения предметов из цветных металлов остается прежним.
Монтажная схема.
Сборка металлоискателя В качестве штанги металлоискателя, можно использовать различные черенки для щеток, швабр и т.д. В том числе и телескопические. Желательно, что бы нижняя часть штанги была не металлической.
Для крепления катушки изготавливаю конструкцию – кольцо, из стальной проволоки диаметром 4 мм. В качестве шаблона для формирования конструкции использую банку от краски диаметром 16 см.
На одном конце этой конструкции выгибаю «ушко». Через это ушко саморезом кольцо будет крепиться к штанге, туда же будет закреплен вывод экрана катушки. Для лучшего контакта, ушко нужно зачистить напильником.
Другой конец изолирую двумя слоями изоленты, для предотвращения образования замкнутого витка в случае использования металлической штанги.
Кликните, для увеличения
Кликните, для увеличения
После того как кольцо из стальной проволоки будет присоединено к штанге, с помощью изоленты креплю катушку к кольцу. Чем больше слоев, тем лучше.
Кликните, для увеличения
Кликните, для увеличения
Соединяю готовую плату с катушкой двухжильным экранированным проводом длинной один метр. Экран кабеля припаиваю к общей шине на плате и к выводу экрана катушки.
Аккуратно изолирую выводы катушки, не допуская замыкания между собой и выводом экрана.
Кабель, соединяющий катушку и плату, закрепляю к штанге в нескольких местах изолентой. Он не должен быть сильно натянут, но и болтаться не должен.
Кликните, для увеличения
Кликните, для увеличения
Нижнюю часть корпуса устройства, креплю к штанге двумя саморезами. Надеваю верхнюю часть корпуса. Можно в место соединения частей корпуса капнуть пару капель клея «момент», но это после настройки.
Кликните, для увеличения
Кликните, для увеличения
Настройка металлоискателя
Во время настройки, возле катушки и металлоискателя не должно быть металлических предметов.
Выставляю переменный резистор R4 и подстроечный R2 в среднее положение. Резистор R5 в любое крайнее положение. Подсоединяю наушники и аккумулятор, включаю питание.
Начинаю медленно вращать R5, в наушниках должен быть слышен сигнал, частота и громкость которого должна меняться по мере вращения R5, нахожу такое положение резистора, при котором громкость сигнала максимальна, при дальнейшем вращении громкость уменьшается, затем сигнал пропадает. Оставляю R5 в этом положении.
Далее медленно вращаю переменный резистор R4, в наушниках должен появиться низкочастотный сигнал. Теперь, если к катушке поднести металлический предмет, частота сигнала должна измениться. Громкость сигнала можно отрегулировать резистором R2.
Если частота сигнала самопроизвольно и быстро меняется, основные причины могут быть следующие:
- Слишком натянулись витки катушки при изготовлении, или катушка была деформирована после изготовления. Для проверки, нужно изготовить и подсоединить другую катушку, можно без изоляции и экрана.
- Причиной нестабильности частоты могут быть конденсаторы C1, C2, C3, резисторы R1, R4, R5, R6. Резисторы R5 и R6 после настройки желательно заменить на один постоянный резистор. Конденсаторы и резисторы должны быть с возможно меньшими температурными коэффициентами (ТКЕ, ТКС). Про температурные коэффициенты можно посмотреть здесь (http://radiokot.ru/articles/11/).
- Плохой контакт в разъеме питания, или некачественный выключатель.
Настройка заключается в установке громкости сигнала в наушниках с помощью R6.
Как работать с металлоискателем «Забава».
После включения питания металлоискателя нужно всегда нажимать кнопку «сброс». Перед началом работы нужно настроиться на грунт в районе поиска. Установите резистором R8 максимальную чувствительность (вращайте по часовой стрелке, до упора). Поднесите поисковую катушку к земле на расстояние 1 – 2 см (рядом не должно быть металлических предметов) и слегка покачивая ее, медленно уменьшайте чувствительность (вращайте регулятор против часовой стрелки), до тех пор, пока сигналы от грунта в наушниках пропадут.
При поиске, катушку нужно перемещать над землей со скоростью примерно 0.5 м/сек, стараясь выдерживать расстояние от грунта до катушки все время одинаковым. В большинстве случаев при обнаружении металлического предмета, металлоискатель подает двойной сигнал.
Если, первым был сигнал высокой частоты, а вторым был низкочастотный сигнал, то найденный предмет из цветного металла, или железный с большой площадью поверхности. Если первый сигнал низкочастотный, а второй высокочастотный, то находка – это железный предмет небольшого размера.
Чтобы определить точное местоположение предмета из цветного металла, нужно поднять катушку над грунтом, затем опустить ее вертикально к земле в предполагаемом местоположении предмета. Если при опускании прозвучал низкочастотный сигнал, значит, под катушкой цветного металла нет. Если катушка опустилась точно над цветным металлом, то прозвучит высокочастотный сигнал. Таким же способом можно обследовать ямы, а так же участки, сильно замусоренные мелкими железными предметами, ржавчиной, угольками и т. д.
При максимальной чувствительности, металлоискатель может постоянно подавать ложные сигналы. Это происходит из-за нестабильной работы поискового генератора, причина может быть в C1 и C2, в катушке или в непрочной конструкции штанги и датчика.
Если ложные сигналы происходят на уровнях чувствительности, при которых ранее металлоискатель работал нормально, то это означает разряд батарейки.
АРХИВ:Скачать с сервера
Металлоискатель Clone PI AVR (Клон ПИ АВР) своими руками — Мир искателей
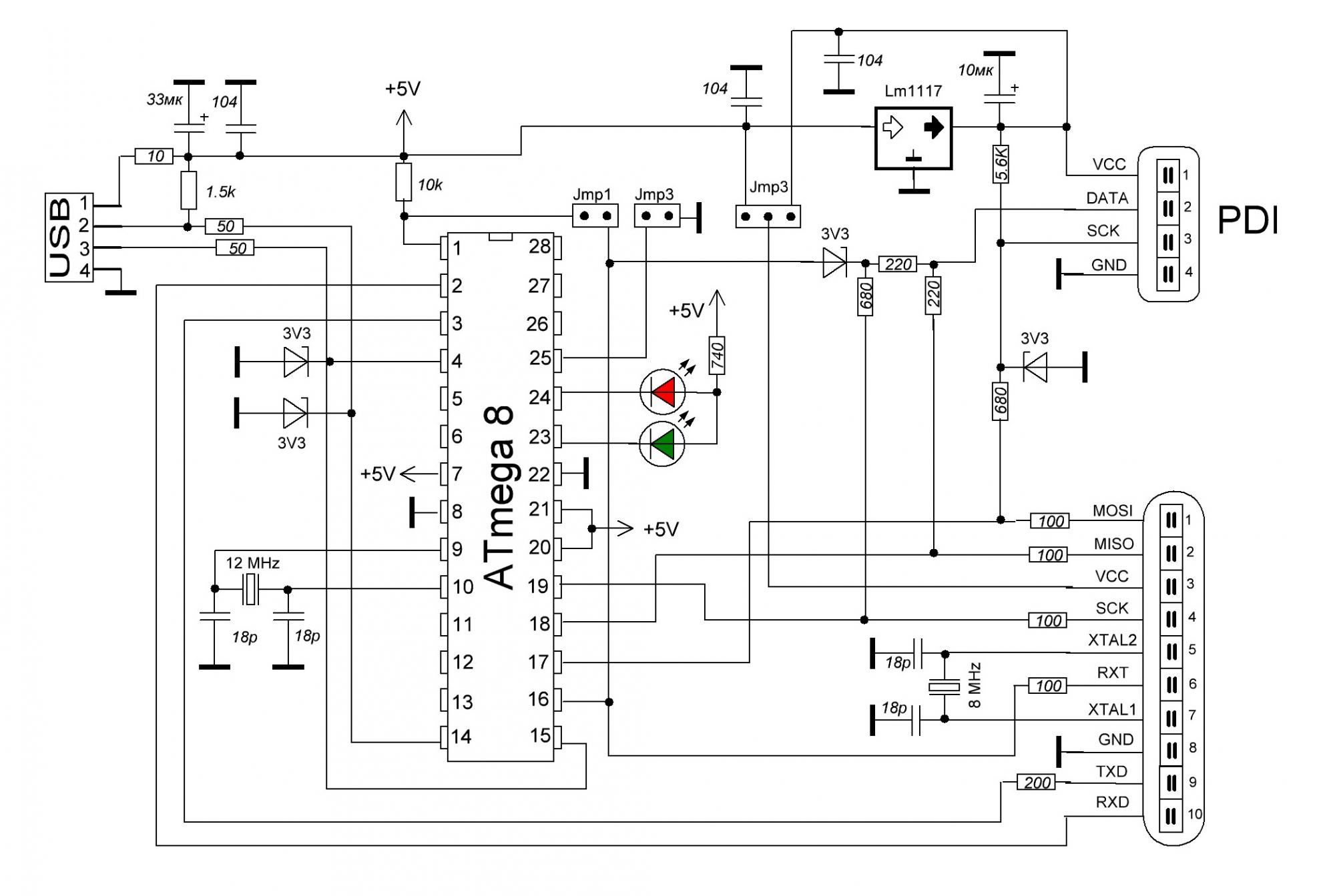
Clone Pi AVR это упрощенная и усовершенствованная версия, популярного у радиолюбителей металлоискателя Clone PI. Так как при изготовлении металлоискателя Clone PI у многих возникали трудности с приобретением АЦП, то в новой версии металлоискателя Клон АВР, Пик контроллер и внешнее АЦП, были заменены на доступный микроконтроллер фирмы AVR с внутренним АЦП Atmega8.
Схема металлоискателя Клон ПИ АВР
А также схема Clone PI AVR с указанными напряжениями постоянного тока
В интернете есть несколько вариантов разведения печатной платы для металлоискателя Клон Пи АВР. Ниже приведена фотография вполне приличной версии печатной платы .
Плата металлоискателя Clone PI AVR
В этом архиве вы можете скачать: разведенную печатную плату в формате *.lay, схему, прошивку и фотографии этапов изготовления платы металлоискателя.
Один из вариантов реализации платы металлоискателя Клон АВР:
Для прошивки микроконтроллера, биты конфигурации необходимо расставить следующим образом:
Металлоискатель Clone PI AVR имеет средний уровень сложности изготовления, из за наличия в схеме металлоискателя, программируемого микроконтроллера. Но в остальном его изготовление, не должно вызвать особых трудностей.
Катушка для металлоискателя Clone PI AVR
С металлоискателем Clone PI AVR, можно использовать катушки от импульсных металлоискателей Tracker и Кощей, а также большие глубинные рамки.
Наиболее универсальные диаметры катушки 20-30 см. Такие катушки будут иметь глубину обнаружения 1 – 1,5 метра и сохранят чувствительность к небольшим металлическим объектам (монеты, украшения и т.д.).
Для изготовления универсальной поисковой катушки, вам необходимо на оправку 26-27 см, намотать 23-24 витка обмоточного эмаль провода диаметром 0.7-0.8мм. В качестве оправки можно использовать кастрюльку подходящего диаметра, или изготовить оправку как на фото ниже:
Для изготовления оправки, берем лист фанеры или ДСП. На нем, при помощи циркуля, чертим круг нужным нам диаметром. Затем берем шурупы или саморезы, одеваем на них кембрики . Шурупы с кембриками вкручиваем по периметру нашей окружности, и получаем оправку для намотки катушки.
Катушка мотается в навал. Затем витки плотно сматываем между собой, скотчем, или изолентой. К концам обмотки подпаиваем провод 2*0.75 мм в изоляции.
Подключаем нашу катушку к плате металлоискателя Клон Пи АВР (Для подключения лучше использовать разъем) и проверяем ее работоспособность. Такая катушка подойдет для испытаний и экспериментов, но для реальной работы, ее следует защитить от ударов, влаги и т.д.
Для этого катушку необходимо закрепить в подходящий пластиковый корпус. Мы в своих конструкциях, используем вот такой универсальный корпус.
Катушка закрепляется внутри корпуса, при помощи термоклея, и затем корпус катушки заклеивается дихлорэтаном, или скручивается нержвеющими саморезами.
Для получения подводной катушки, корпус лучше заполнить эпоксидной смолой. Это уменьшит ее пловучести, и предотвратит поподание воды во внутрь корпуса.
Тут вы можете посмотреть другие способы изготовления катушек для импульсных металлоискателей Клон.
А в статье про глубинные металлоискатели описаны способы изготовления глубинных рамок для импульсных металлоискателей.
Прошивки для металлоискателя Clone PI AVR:
- Прошивка версии 1.7.3 для ATmega8 — CPI_PRG_173_AVR
- Прошивка версии 1.7.3A для ATmega8, с измененным алгоритмом автоподстройки грунта — CPI_PRG_173a_AVR
- Прошивка версии 1.8.0 для контроллера ATmega8 — CPI_PRG_180_AVRИзменения:
- Громкость озвучки кнопок приведена в соответствие с основной громкостью.
- Автоподстройка грунта (Ground adjust) теперь работает в 3-х режимах — adaptive, fixing и off(static).
- Защитный интервал теперь может подбираться при включении (auto), использоваться запомненное значение (last), или выбираться пользователем принудительно в диапазоне 2 … 80.
- Добавлен параметр Volume raise, позволяющий уменьшать громкость в начале шкалы (при слабых откликах). Это улучшает устойчивость схемы при низком пороге.
- Убран режим двойной мощности, показавший свою практическую бесполезность.
- При включённой подсветке на индикатор выводится буква «L» (Light).
- Прошивка версии 1.8.1 для контроллера ATmega8, в прошивки исправленны ошибки и снижено энергопотребление — CPI_PRG_181_AVR
Заключение: металлоискатель Clone PI AVR это проверенный и популярный среди радиолюбителей и поисковиков металлоискатель. Он имеет сопоставимую с заводскими металлоискателями глубину поиска и полностью открытую схему и прошивку для его изготовления. К недостаткам металлоискателя следует отнести завышенное энергопотребление.
Обзор готовой платы металлоискателя Клон ПИ АВРВидео запуска металлоискателя Clone PI AVR собранного своими руками, и возможности его настройки:
При написании этой статьи использовались материалы:
- Сайт разработчика — http://fandy.hut2.ru
- И этот сайт — http://metdet.ucoz.ua/publ/metalloiskatel_klon/1-1-0-13
- А также форум — http://md4u.ru/viewtopic.php?f=5&t=660 — тут вы можете задать вопросы по самостоятельной сборке металлоискателя.
Цифровой металлоискатель ( металлодетектор ) на AVR микроконтроллере
В данной статье хочу представить Вашему вниманию мой проект «Металлоискатель на микроконтроллере AVR». Данный проект несложен для самостоятельного изготовления и содержит минимум деталей для нормального функционирования устройства. Устройство имеет как звуковую индикацию обнаруживаемых предметов, так и цифровую. Принцип работы устройства заключается в подсчете периода нескольких десятков импульсов, фильтрация данного значения, проход через условности автоматической коррекции и сброса а затем вывод на дисплей.
Устройство работает в динамическом и статическом режиме с возможностью переключения режимов и огрубления чувствительности в каждом из них. Метало детектор обеспечивает обнаружение по воздуху, на расстоянии от центра поисковой катушки:
- монета 1 копейка ————5см;
- монета 5 копеек ————10см;
- крышка от консервации —25см;
- ведро металлическое —-~45см.
Конструкция:
Печатная плата металлоискателя выполнена из одностороннего фольгированного стеклотекстолита методом ЛУТ (Лазерно-Утюжной технологии:). Разъем для внутрисхемного программирования я сделал прямо на плате, чтобы не изворачиваться с вытаскиванием микроконтроллера, во избежании погнутых и поломанных выводов. Транзистор КТ3102 с любым буквенным индексом, он работает в режиме ключа и коэффициент усиления неважен, так же возможна замена транзистора на другой аналогичный N-P-N. Микроконтроллер ATmega8-16Mhz можно тактировать от внутреннего RC-генератора на максимальной частоте, при этом быстродействие в динамическом режиме может заметно ухудшиться, поэтому рекомендую все-таки поставить кварцевый резонатор.
Светодиод VD1 — красный , служит для питания дисплея от 3-х вольт, хотя его можно не ставить, а подключить напрямую. Дисплей работает и от 5В, но при этом длительная работа не гарантируется. Если применить 4 пальчиковые аккумулятора с суммарным напряжением 4,8В , то стабилизатор 78L05 можно не ставить, конденсатор C1 естественно тоже. Конденсатор для поисковой катушки нужно использовать с малым ТКЕ, желательно поставить тантал. При не подходящем конденсаторе значения на дисплее будут сильно «скакать». Я использовал конденсатор типа «зеленый приплюснутый бочонок» залитый чем-то похожим на зеленый эпоксидный клей. Выдрал его из китайского радиоприемника (по моему). Емкость данного конденсатора не критична, рекомендуемая 0.01-0.05 мкФ , от этого зависит поисковая частота датчика.
Катушку я мотал на 3-х литровой банке 80-120 витков, проводом 0,2-0,5 (тоже не критично). После намотки катушки на банку, снял и туго замотал ее скотчем для жесткости. Затем обязательно сверху намотать экран из медной или алюминиевой фольги. Намотка должна быть без просветов, с плотно прилегающими к друг-другу витками. От экрана делается отвод из медной проволоки, который припаивается затем к минусу источника питания. Конструкция поисковой катушки должна быть максимально жесткой, поэтому я свою засунул в распиленную пластиковую водопроводную трубу, и дополнительно обмотал скотчем.
Прошивка:
Фьюз-биты микроконтроллера программируются на тактирование от внешнего кварцевого резонатора.
Прошивка микроконтроллера (.hex) — 0.007Mb.
Схема металлоискателя (.pdf) — 0.1Mb.
Выбираем металлоискатель
Все современные металлоискатели основаны на микропроцессорной обработке алгоритмов разработанных, проверенных и отлаженных в 60 годах прошлого столетия. Технические возможности разных типов схем приблизительно равные по своим максимальным показателям и доведены до теоретического предела еще тогда.
С применением микроконтроллеров улучшаются все характеристики схемы, упрощается конструкция и повышается надежность. Но это единоразово, уже от современности микроконтроллеров характеристики прибора не изменяются (имеется в виду что ранее был применен микроконтроллер с функциональными возможностями, позволяющими в полной мере реализовать возможности схемы).
Отличия современных металлоискателей проявляются в
-количестве сервисных возможностей,
-эргономике, в удобстве использования,
-добавлением некоторых современных патентных доработок, незначительно повышающих технические характеристики,
-весе и т. д., то есть, во второстепенных параметрах, не влияющих на максимальные показатели.
Добавка лишних 5-10 сантиметров неуверенного обнаружения объекта очень значительным усложнением и удорожанием прибора на общий результат поиска особого влияния не оказывает. Максимальные показатели достигаются точными настройками прибора, а в процессе поиска они сбиваются, человек утомляется постоянно следить за настройками и все сводится к 20-25 сантиметрам на пятак СССР в лучшем случае.
При выборе прибора нужно учитывать
-наличие и надобность дискриминации,
-количество сервисных функций,
-возможность подводного поиска,
-ночного поиска,
-скорость и динамику реакции прибора на мишень,
-вес, эргономику,
-стабильность характеристик, ширину диапазона влияющих факторов на заявленную стабильность характеристик прибора,
-удобство пользования,
-комплектацию комплекта,
-время непрерывной работы до разряда элементов питания,
-соответствие заявленных характеристик действительности и по какой цене вам предлагают выбранный прибор.
При наличии дискриминации в пользователя есть возможность в ущерб максимальной чувствительности отстроиться от реакции прибора на черный металл.
Количество сервисных функций и их надобность расширяет диапазон настроек, а значит и возможностей прибора.
Возможность подводного поиска это гарантия герметичности, повышенной прочности и надежности датчика, потому что для подводного поиска к датчику предъявляются повышенные требования.
Возможность ночного поиска расширяет возможности прибора (без доработок).
Скорость реакции определяет время срабатывания на мишень.
Динамика это время отработки мишени (законченный процесс от реакции прибора на мишень до индикации результатов), плюс минимальное время, через которое прибор будет готов отработать следующую мишень. От этого зависит скорость поиска и настроение оператора.
Эргономика это главный фактор, влияющий на результаты поиска. Чем приятней и легче работать с прибором, тем больше находок вы сделаете с меньшей усталостью.
Стабильность характеристик датчика – величина изменений характеристик датчика под влиянием внешних факторов на протяжении рабочего времени, чем стабильней датчик, тем реже нужно подстраивать прибор в процессе поиска, тем быстрее вы будете работать.
Ширина диапазона влияющих факторов на заявленную стабильность характеристик. Например, для одного прибора гарантируется нормальная работа от -30, до +40 градусов, а для другого, только от 0 до +30.
Комплектация комплекта – как минимум должны быть сумка, зарядное устройство, желательно наличие защитных чехлов.
Совершенство схемы и качество настройки.
Схему можно упростить для удешевления конструкции. Качество настройки требует высоко квалифицированных и высоко оплачиваемых специалистов, приборов, времени, условий, все это выливается в себестоимость прибора. И только это влияет на максимальные показатели металлоискателей, а не его принцип работы. Еще раз повторюсь, приборы всех имеющихся типов приблизительно на одном уровне по своим техническим возможностям.
Металлоискатели универсальными быть не могут. Поэтому их нужно выбирать для конкретных задач поиска.
Например, для «войны», для археологии, для поиска металлических конструкций в бетоне, осколков в древесине, металлических предметов в животе животных (в ветеринарии) и т. д. дискриминация металлов не нужна. А так, как она работает, она не нужна вовсе.
По неприхотливости датчика металлоискатели можно разделить на импульсные и все остальные.
Датчики этих приборов самые неприхотливые в эксплуатации, самые легкие и надежные. Работают практически с любыми параметрами и самые простые в изготовлении. При горе, намотал витков 30 через локоть, обвязал, придал форму, подключил и пошел дальше работать. Не чувствительные к механическим деформациям, ими во время поиска можно косить траву, на результат поиска это не сказывается. В добавок к сказанному импульсные приборы не чувствительны к индустриальным помехам. Но они самые не экономичные из всех типов приборов.
Во всех остальных приборах датчик на порядок нежней и чувствительней ко всему, что можно придумать. Вдобавок к сказанному плохая взаимозаменяемость и изготовить его может только специалист имеющий опыт изготовления таких датчиков в лабораторных условиях. Их достоинство в наличии дискриминации металлов.
По принципиальным особенностям схем, металлоискатели можно разделить на следующие категории.
BFO — beat frequency oscillation (метод биений). Измеряемым параметром металлоискателя является частота LC-генератора контролируемая методом биений. Самый простой тип приборов и самый не стабильный.
TR/VLF — transmitter-reciver / very low frequency (передатчик-приемник / очень низкая частота). Поисковую головку металлоискателя образуют две катушки, расположенных в одной плоскости и сфазированные так, что при подаче сигнала в передающую катушку на выходах приемной присутствует минимальный сигнал. Измеряемым параметром является амплитуда сигнала на приемной катушке и фазовый сдвиг между переданным и принятым синусоидальными сигналами. На них можно делать приборы с разнесенными катушками.
RF — radio frequency (радио частота) — высокочастотный вариант металлоискателя, где передающая и приемная катушки образуют не плоский трансформатор, а разнесены в пространстве и расположены перпендикулярно друг к другу. Приемная катушка принимает отраженный от металлической поверхности сигнал, излучаемый передающей катушкой. Этот метод используется в глубинных приборах. Характеризуется нечувствительностью к мелким объектам и отсутствием дискриминации. Их удобно применять только в комплекте с третьим, компенсационным, датчиком. Тогда, за счет частичной компенсации влияния передающего сигнала на приемную катушку можно добиться большей глубины обнаружения.
OR — off resonance (срыв резонанса). Анализируемым параметром металлоискателя является амплитуда сигнала на катушке колебательного контура, настроенного близко к резонансу с подаваемым на него сигналом от генератора. Появление металла в поле катушки вызывает или достижение резонанса или уход от него, в зависимости от вида металла, что приводит к увеличению или уменьшению амплитуды колебаний на катушке. Плохая стабильность работы. Применяется редко.
PI — pulse induction (импульсная индукция). В металлоискателях этого типа катушка поисковой головки не является частью колебательного контура. В нее от запускающего генератора подается импульсный сигнал. Анализируемым параметром является время окончания переходного процесса (положение заднего фронта импульса напряжения).Этот метод зачастую применяется в водных металлоискателях и металлоискателях с разнесенными катушками. Самый стабильный, самый простой и самый надежный металлоискатель из всех известных типов. Недостаток – нет дискриминации.
Так что в выборе металлоискателя сложного ничего нет и какой выбирать решать вам.
Робот-металлоискательс использованием микроконтроллера pic
Робот-металлоискательс микроконтроллером pic, этот робот предназначен для обнаружения металла в местах, недоступных для людей. Робот-детектор металла обнаруживает металл через датчик металлоискателя. Его обнаруживают металлы, подходящие к нему способами. Куда бы он ни пошел, он продолжает обнаруживать металл. В случае обнаружения металла звук будет издаваться в диспетчерской или на стороне приемника. Эта статья даст вам краткое представление о том, как работает робот-металлоискатель.Как спроектировать робота-металлоискателя с помощью микроконтроллера pic. Компоненты робота-металлоискателя и работа робота-металлоискателя.
Применения робота-металлоискателя:
Робот-металлоискатель может использоваться во многих промышленных приложениях. Некоторые из них приведены ниже:
- Обнаружение металлов в шахтах
- Обнаружение металлов в отдаленных районах Система безопасности
- и многие другие.
Состав роботов-металлоискателей:
Основные компоненты робота-металлоискателя приведены ниже:
- Жидкокристаллический дисплей (LCD) 16x 2
- Радиочастотный передатчик и приемник 433 МГц
- HT 12E, HT 12D кодировщик и декодер.
- PIC16F877A микроконтроллер
- Резисторы
- конденсаторы
- кварцевый генератор
- Датчик металлоискателя
- Двигатели постоянного тока
- Драйвер двигателя постоянного тока L298N
- Клавиатура
- Диоды
- Светодиод
- зуммер
Робот-металлоискатель использует радиочастотный передатчик и приемник, соединенный с микроконтроллером для отправки и получения данных. Также можно использовать передатчик и приемник Infrad, но он имеет меньший диапазон, чем передатчик и приемник радиочастоты.Робот-металлоискатель состоит из передающей и приемной части. Часть приемника используется для получения данных от части металлоискателя и отправки команд роботу-металлоискателю с помощью клавиатуры. Он также используется для управления роботом. Принципиальные схемы обоих приводов приведены ниже:
Принципиальная схема приемной части:
Принципиальная схема приемника представлена ниже. Он состоит из радиоприемника и кодировщика. Энкодер преобразует сигналы микроконтроллера PIC16F877A в сигналы приемника.
Приемник робота-металлоискателя с использованием микроконтроллера pic
Приемная часть робота-металлоискателя состоит из радиочастотного приемника, который принимает команды от радиопередатчика.Он получает команды для движения влево, вправо, назад и вперед. Датчик металлоискателя также соединен с приемной частью. В случае обнаружения металла, зуммер начинает издавать звук или начинает работать сигнализация. На приведенной выше принципиальной схеме звуковой сигнал или зуммер не используются. Но вы также можете использовать зуммер. Микроконтроллер PIC16F877A используется для управления всем. Кодовый код может быть написан с использованием компилятора Mikro c или любого компилятора, который вам удобнее. Драйвер двигателя 293D сопряжен с микроконтроллером pic для управления двумя двигателями постоянного тока.Двигатели постоянного тока используются для движения роботов-металлоискателей.
Принципиальная схема передатчика робота:
Принципиальная схема передатчика приведена ниже. Он состоит из клавиатуры, радиопередатчика, декодера и источника питания для микроконтроллера PIC16F877A. Клавиатура сопряжена с микроконтроллером PIC16F877A. Клавиатура используется для управления роботом влево, вправо, назад и вперед.
Передатчик робота-металлоискателя с использованием микроконтроллера pic
[button-brown url = ”http: // store.microcontrollerslab.com/product/metal-detector-robot-using-pic-microcontroller/ ”target =” _ self ”position =” center ”] нажмите здесь, чтобы приобрести код и принципиальную схему [/ button-brown]
можно использовать любую клавиатуру. Вам просто нужно написать код, чтобы указать функцию каждой кнопки клавиатуры. Этот проект металлоискателя — это как раз идея роботизированного проекта. Вы можете написать код для этого проекта. Рекомендую написать код для этого робота. Если вы чувствуете какие-либо проблемы при написании кода, дайте мне знать своими комментариями.
(PDF) Система обнаружения металлов на базе микроконтроллера с технологией GSM
Система обнаружения металлов на базе микроконтроллера с технологией GSM
DOI: 10.9790 / 1676-10118087 www.iosrjournals.org 87 | Страница
V. Заключение
Был разработан металлоискатель, управляемый микроконтроллером с технологией GSM. При минимальных затратах
система обнаружения металла на основе микроконтроллера с модемом GSM может быть построена с эффективной производительностью
.Если телефон GSM необходимо использовать не только вначале (особенно в домашних условиях),
рекомендуется, чтобы интерфейс между микроконтроллером и телефоном GSM был беспроводным.
Ссылки
[1]. Александр, C.K. и Садику, M.N.O. (2000): Основы электрических цепей, McGraw-Hill Companies, США, стр. 212
[2]. Анон, 2008: www.bbc.co.uk/coast/programmes/09-john-o-groats-berwick.shtml, 25.09.2008
[3]. Гросвенф, Эдвин С.и Вессон, Морган (1997): Александр Грэм Белл: Жизнь и времена человека, который изобрел телефон
, Harry N. Abrahms, Inc., Нью-Йорк, США, стр. 107. ISBN 0-8109-4005-1.
[4]. Microchip, 2001: www.microchip.com.
[5]. Mikro Elektronika (2007): Программирование микроконтроллеров PIC на BASIC, www.mikroelektronika.com
[6]. Лоример и Лехнер (1995): Словарь английского языка Нью-Вебстера, международное издание, Lexicon
Publications Incorporated, Нью-Йорк, США, стр.996.
[7]. Тераджа, Б. и Тераджа, А. (2005): Учебник электрических технологий, пересмотренное 24-е издание, S. Chand & Company Ltd.,
Нью-Дели, Индия, стр. 2408-2411
[8]. Токчи, Р.Дж., Видмер, Н.С. и Мосс, Г.Л. (2004): Принципы и приложения цифровых систем, 9-е издание, Pearson Education,
Inc., Нью-Джерси, США, стр. 74-77
[9]. Википедия 2008: www.en.wikipedia.org, 25.09.2008
Биография авторов
Бурдийон.О. Омидже имеет степень бакалавра в области электротехники и электроники, магистра и доктора наук
в области электроники и телекоммуникаций Университета Порт-Харкорта и Университета Эмброуза Алли
(A.A.U), Экпома соответственно. Его области исследований: искусственный интеллект, робототехника,
Проектирование встроенных систем, моделирование и симуляция динамических систем, интеллектуальные измерительные системы,
автоматизированное управление, телекоммуникации и ИКТ.Он имеет более тридцати (30) технических статей и публикаций в
авторитетных международных научных журналах, а также разработал более десяти (10) прикладных программ. Он является членом
Института инженеров электроники и электротехники (MIEEE), членом Общества инженеров Нигерии;
, а также зарегистрированный инженер (COREN). В настоящее время он является старшим преподавателем и пионером кафедры электронной и компьютерной инженерии
Университета Порт-Харкорта, Нигерия; а также консультантом компаний
& Institutions.Счастлив в браке, имеет детей.
Аджабуэго, G.O. имеет степени бакалавра и магистра в области электротехники и электроники. Его области исследований:
Проектирование электрических служб, Силовая электроника, Электромагнитные поля и волны, Возобновляемая энергия и т. Д. У него есть
качественных статей и публикаций в журналах. Он является членом Института инженеров электроники и электротехники
(MIEEE), членом Общества инженеров Нигерии; а также зарегистрированный инженер (COREN).В настоящее время он является преподавателем
с богатым опытом работы на кафедре электротехники Университета Порт-Харкорта. Он
счастлив в браке с детьми.
Osikibo, L.T. Имеет степень бакалавра в области электротехники и электроники, Государственный университет науки Риверса и
технологий, а также степень магистра в области приборостроения и управления (Великобритания). Его исследовательские интересы связаны с телекоммуникациями,
Контрольно-измерительные приборы, управление, автоматизация, робототехника и мехатроника.В настоящее время он преподает на кафедре
электротехники и вычислительной техники, Государственный университет науки и технологий Риверса,
Порт-Харкорт, Нигерия
Радиочастотная схема роботизированного детектора металла с использованием 8051
Закопанные под землей фугасы создают угрозу для жизни и влияют на экономику страны. Обнаружение и удаление этих мин вручную — опасная задача, которая иногда может приводить к несчастным случаям. В таких ситуациях роботы помогают обнаруживать фугасы.Не только наземные мины, эти роботы могут использоваться для обнаружения любых других металлов, присутствующих в земле. В этой статье рассказывается о роботе-металлоискателе, использующем радиочастотную технологию. Прежде чем узнать об этом роботизированном транспортном средстве с металлоискателем, узнайте о , как работает схема металлоискателя .
Беспроводной робот-металлоискатель Принцип схемы:
Предлагаемая система состоит из схемы передатчика и приемника. Схема передатчика передает команды, необходимые для работы робота.Схема приемника получает эти команды через RF и перемещает робота в соответствии с полученными командами. Металлоискатель подключен к контроллеру на стороне приемника. Таким образом, всякий раз, когда обнаруживается какой-либо металл, робот останавливается на этом и начинает звонить зуммер.
Схема беспроводного робота-металлоискателя:
Цепь передатчика: Робот-металлоискатель — передатчик
Цепь приемника: Робот-металлоискатель — Цепь приемника
Компоненты цепи:
Компоненты оборудования:
- Микроконтроллер AT89c51.
- Кодер и декодер RF
- Пара передатчика и приемника RF.
- Кнопки.
- Зуммер.
- Робот.
- L293d
- RS 232 кабель.
Программные компоненты:
- Программное обеспечение Keil
- Вспышка магии
- Proteus.
Схемотехника робота-металлоискателя с использованием микроконтроллера:
Проект робота-металлоискателя можно разделить на секции: 1) секция передатчика, 2) секция приемника.
Секция передатчика состоит из кодировщика RF, передатчика RF и кнопок. Используемая здесь ИС RF-кодера — HT12E. Это 18-контактная ИС. 4-битный двоичный вход подается на декодер через контакты AD0, AD1, AD2, AD3. Контакт TE разрешает передачу, когда он низкий. A0-A7 — это адресные контакты, используемые для защищенной передачи. Эти контакты подключены к земле в цепи передатчика. 4-битные данные передаются на РЧ-передатчик параллельно. Он передается на РЧ-приемник поочередно.Вход на энкодер осуществляется с помощью кнопок. ВЧ пара работает с частотой 434 кГц.
Приемниксостоит из микроконтроллера AT89c51, РЧ-декодера, РЧ-приемника, металлоискателя, зуммера, ИС L293d и робота.
Полученные данные поступают в РЧ-декодер. Здесь используется радиочастотный декодер HT12D. Декодированные входы подключены к порту 2 микроконтроллера. Четыре контакта данных D0-D3 подключены к портам P2.0 — P2.3. Декодированные данные поступают на микроконтроллер, который управляет движением робота.Зуммер подключен к порту 3.4, и он звонит, когда на его пути обнаруживается какой-либо металл.
Металлоискатель подключается к выводу 3.2 микроконтроллера. Здесь вместо металлоискателя подключается кнопка. Металлоискатель играет в схеме главную роль. Внутри него будет осциллятор, который вырабатывает переменный ток, который проходит через катушку, создавая переменное магнитное поле. Когда какой-либо металл присутствует рядом с катушкой, это индуцирует магнитное поле, и поэтому его можно обнаружить с помощью другой катушки, которая обнаруживает изменение поля.
L293d — это ИС привода двигателя. Эта ИС используется для управления двигателями. L293d имеет внутри h-мост. Чтобы узнать больше об этой микросхеме, обратитесь к листу данных L293D .
Моделирование цепи робота-металлоискателя на основе RF:
Беспроводная цепь робота для обнаружения металла, работающая:
- Изначально запишите код в микроконтроллер с помощью flash magic.
- Теперь включите питание цепи.
- Теперь отправьте команду «1» с помощью передатчика.
- Передается приемнику.
- На стороне приемника приемник принимает эти команды и перемещает робота в соответствии с командами.
- Следующие команды перемещают робота в указанных направлениях.
- Вперед
- Назад
- слева
- Правый
- Во время движения, если на его пути обнаруживается какой-либо металл, робот останавливается на этом месте и звонит в зуммер.
- Он снова начинает движение, когда отправляются команды с передатчика.
RF Проект роботов для обнаружения металлов Выходное видео:
Алгоритм цепи робота-металлоискателя:
- Первоначально объявите порт 2 как вход, поскольку он подключен к декодированному входу.
- Теперь объявите порт 1 как выход, поскольку выводы двигателя робота подключены к порту 1.
- Разрешить внешнее прерывание.
- Теперь проверьте вход порта 2.
- Если полученное значение равно 1, переместите робота вперед, установив значение порта как 0x01.аналогичным образом переместите робота в соответствии с введенным значением.
- При возникновении прерывания переведите выходные контакты двигателя в низкий уровень. Это написано в ISR.
Применение роботов-металлоискателей на базе микроконтроллера:
- Эти роботы используются для обнаружения мин.
- Роботы используются для обнаружения минералов, присутствующих в земле.
- Эти роботы используются для обнаружения бомб.
- Их можно использовать в строительной индустрии для обнаружения стальных стержней в бетоне.
- Они используются в аэропортах и зданиях службы безопасности для обнаружения оружия.
Ограничения цепи:
Передатчик может управлять роботом только в диапазоне RF, который составляет примерно 30 метров.
ПРОЕКТЫ МЕТАЛЛОИСКАТЕЛЯ С УПРАВЛЕНИЕМ МИКРОКОНТРОЛЛЕРОМ
Результат отображается в виде двух шкал, по которым оценивается материальная цель. Кроме того, на экране отображается малая шкала уровня отклика и текущего напряжения питания.PIC18F252 Программа… Проекты в области электроники, Проекты по обнаружению металлов с микроконтроллером «AVR Project, Microcontroller projects,»
Результат отображается в виде двух шкал, по которым оценивается материальная цель. Кроме того, на экране отображается малая шкала уровня отклика и текущего напряжения питания. PIC18F252 Программа предназначена для контроллера PIC18F252. Контроллер PIC16F873 (A) в этой версии использовать нельзя. Это более требовательно к контроллеру ресурсов.252-й совместимый контроллер на «пинах» с 873-м и может быть запрограммирован одним и тем же программистом. Программа работает только с корзиночными катушками! R21 Для этой прошивки нужно закоротить резистор R21 (в старой версии схемы). В этой версии назначение кнопок изменено на
.PIC16F873A ДЕТЕКТОР МЕТАЛЛА CLONE PI
ДЕТЕКТОР МЕТАЛЛА ATMEGA32 CLONEPI-2
ClonePI-2 является дальнейшим развитием проекта ClonePI). Основные задачи при проектировании — получить дискриминацию металлов
.
ATMEGA8 ДЕТЕКТОР МЕТАЛЛА CLONEPI AVR
ClonePI AVR — это новое упрощенное решение для импульсного металла ClonePI)
# Используйте контроллер ATmega8 от Atmel.
# Вместо использования внешнего АЦП внутреннего контроллера АЦП.
Чтобы получить такую же чувствительность, как у внешнего АЦП, используется передискретизация.
# Использовать тактирование внутреннего контроллера RC-генератора.
ATMEGA8-16PI CLONEPI-W
Вместо LCD используется светодиодный дисплей. Сократите администрирование, оставив только самое необходимое. Учтите некоторые ошибки в предыдущих версиях.
MICRICHIP, ATMEL AVR Металлоискатель, управляемый микроконтроллером Проекты все файлы источник: ПРОЕКТЫ МЕТАЛЛОИСКАТЕЛЯ, УПРАВЛЯЕМЫЙ МИКРОКОНТРОЛЛЕРОМ загрузка: Проекты металлодетекторов, контролируемых микроконтроллером.Альтернативная ссылка RAR 2 альтернативная ссылка 3
Металлоискатель | Hackaday
Вы когда-нибудь внезапно нуждались в поиске небольшого металлического предмета, спрятанного в лесу? Нет? Ну, и мы тоже. Но мы не можем сказать то же самое о [зафоде], семья которого надеялась уладить спор, найдя доли землемера, отмеченные углами их собственности. Это была идеальная работа для металлоискателя, но так как у них не было его, исправное устройство приходилось собирать буквально из мусора.
Для начала [zaphod] должен был исследовать, как на самом деле работает металлоискатель. После рассмотрения плюсов и минусов различных подходов было принято решение использовать схему генератора частоты биений (BFO). Это не лучший дизайн, может быть, даже худший, но он может быть построен из имеющихся деталей, и иногда это все, что имеет значение. После упаковки транзистора 2N3904, усилителя LM386 и таймера 555, любимого всеми читателями Hackaday, в корпус вместе с некоторыми из их ближайших друзей, пришло время собрать остальную часть металлоискателя.
Смотри, мама, нет MCU!Катушка датчика была изготовлена путем извлечения провода из балласта старой люминесцентной лампы и 27 обмотки его вокруг крышки ведра. Он был прикреплен к концу ручки метлы с помощью нескольких уголков, сделанных из листового ПВХ, при этом соблюдая осторожность, чтобы не использовать какие-либо металлические крепления, которые могут отбросить детектор. С ручкой старого сверла посередине, которую можно было удерживать, металлоискатель был готов и действительно выглядел как часть.
Так что [зафод] спас положение, обнаружив земельные участки и изучив семейный участок? К сожалению нет.Однако это не был технический сбой; Металлоискатель, похоже, работал, хотя для его срабатывания требовался довольно крупный предмет. Настоящая проблема заключалась в том, что после более внимательного изучения геодезисты выставили только одну ставку, если они не получили особых указаний об ином. Поскольку они уже знали, где этот…
Если ваш самодельный металлоискатель не может найти то, чего никогда не было, действительно ли он вышел из строя? Просто немного, над чем можно медитировать. В любом случае, когда даже самая дешевая интеллектуальная лампочка оснащена микроконтроллером, достаточно мощным, чтобы имитировать ранние домашние компьютеры, мы всегда рады видеть, как кто-то поддерживает старые методы с помощью горстки микросхем.
Металлоискатель верхней части PDF с помощью микроконтроллера PIC, взаимодействующего с ПК
Проектирование и изготовление беспроводной системы управления для сверлильного станка
Существует два типа сверл, которые в основном используются в промышленности: настольное сверло и вертикальное сверло. Настольное сверло используется для сверления отверстий в материалах, включая дерево, пластик и металлы.Обычно он прикрепляется к столу болтами, чтобы его нельзя было толкнуть и чтобы можно было безопасно просверлить большие куски материала. Последняя разновидность сверлильного станка называется колонковой дрелью. У него длинная колонна, стоящая на полу. Он может выполнять ту же работу, что и настольное сверло, но из-за своего большего размера его можно использовать для сверления больших кусков материалов и создания более крупных отверстий. Сверлильный станок в основном используется для резки или забивки материалов.Кончик, а иногда и кромки режущего инструмента выполняют работу по врезанию в целевой материал. Температура инструмента зависит от типа материалов. Чем толще материалы, тем сильнее повышается температура инструмента. В этой системе управления температура инструмента считывается датчиком LM35 и отправляется на микроконтроллер PIC , а затем микроконтроллер PIC отправляет состояние температуры на хост-сервер через клиентский компьютер, который подключен к этой машине. .Клиентский компьютер и машина соединены последовательным соединением RS232. Температура также отображается на ЖК-дисплее машины. Когда температура превышает 50 ° C, на ЖК-дисплее отображается команда «перегрев», включается светодиод, и контроллер на сервере знает, что температура машины высокая. Затем сервер отправляет команду на снижение скорости двигателя постоянного тока. В это время реле автоматически включается, чтобы переключить двигатель насоса на распыление воды для смазки.Двигатель насоса автоматически останавливается, когда двигатель снова работает с нормальной скоростью.
Показать больше5 Подробнее
Микроконтроллерный металлоискатель, обходной металлоискатель, थ्रू मेटल डिटेक्टर — Tevatron Technologies Pvt. Ltd., Noida
Микроконтроллерный металлоискатель, обходной металлоискатель, वॉक थ्रू मेटल डिटेक्टर — Tevatron Technologies Pvt.ООО, Нойда | ID: 6807474133Описание продукта
Tevatron Technologies высокоинновационный и гибкий продукт Металлоискатель на базе микроконтроллера ориентирован на рынок систем безопасности, видеонаблюдения и безопасности.Он изготовлен из высококачественного материала и передовых технологий. Это очень гибкий продукт , который предлагает расширенные функции по конкурентоспособным ценам.
Артикул: SP-21. Тег: Sec-Prod-1.Описание продукта
Tevatron Technologies в высшей степени инновационный и гибкий продукт Металлоискатель на базе микроконтроллера ориентирован на рынок систем видеонаблюдения и безопасности. Он изготовлен из высококачественного материала и передовых технологий.Это очень гибкий продукт , который предлагает расширенные функции по конкурентоспособным ценам.
Характеристики продукта:
- Предназначен для низкого уровня безопасности и контроля
- Обнаружение всех металлов, как черных, так и цветных
- Автоматическая балансировка с нажатием кнопки
- Высокая чувствительность и автонастройка для каждого приложения
- Рабочая температура От -10 ° C до + 50 ° C 0-95% HR
Заинтересовал этот товар? Получите последнюю цену у продавца
Связаться с продавцом
Изображение продукта
О компании
Год основания 2012
Юридический статус компании с ограниченной ответственностью (Ltd./Pvt.Ltd.)
Характер поставщика бизнес-услуг
Количество сотрудников от 26 до 50 человек
Годовой оборот 50 лакх — 1 крор
Участник IndiaMART с февраля 2013 г.
GST09AAECT4818J1Z0
Компания Tevatron Technologies Pvt. Основана в 2012 году. Ltd. занимается предоставлением услуг по проектированию встроенных систем, услуг технической документации, услуг по внедрению дизайна, услуг по проверке и валидации, электротехнической продукции, летних тренингов и многих других услуг.Мы — Частная компания с ограниченной ответственностью (зарегистрированная частная компания с ограниченной ответственностью при Министерстве корпоративных дел, Правительство Индии), которая широко известна тем, что предоставляет услуги в соответствии с потребностями клиентов. Основная цель нашей компании — предоставить образовательным учреждениям и студентам качественные, отраслевые и ориентированные на трудоустройство решения по развитию / повышению квалификации.