Что такое микрошаговый режим работы шагового двигателя. Как он влияет на характеристики двигателя. Каковы основные преимущества и недостатки микрошагового режима. В каких случаях целесообразно его применение.
Что такое микрошаговый режим работы шагового двигателя
Микрошаговый режим — это способ управления шаговым двигателем, при котором происходит дробление основного шага на более мелкие микрошаги. Это достигается за счет плавного изменения токов в обмотках двигателя.
При обычном полношаговом режиме ток в обмотках меняется дискретно — он либо максимальный, либо нулевой. В микрошаговом режиме ток в одной обмотке плавно снижается, а в другой — плавно нарастает. Благодаря этому ротор шагового двигателя можно зафиксировать практически в любом промежуточном положении между основными шагами.
Как микрошаговый режим влияет на характеристики двигателя
Применение микрошагового режима оказывает существенное влияние на ряд характеристик шагового двигателя:
- Повышается разрешающая способность — количество возможных позиций ротора на оборот увеличивается в несколько раз
- Снижается уровень вибраций и шума при работе двигателя
- Движение становится более плавным, особенно на низких скоростях
- Уменьшается максимальный момент, развиваемый двигателем
- Снижается максимально достижимая частота вращения
Рассмотрим подробнее, как микрошаговый режим влияет на эти параметры.
Повышение разрешающей способности
При использовании микрошагового режима разрешающая способность шагового двигателя может быть увеличена в несколько раз. Например, если у двигателя угол шага составляет 1.8° (200 шагов на оборот), то при микрошаговом режиме 1/8 получается уже 1600 шагов на оборот. А при дроблении 1/16 — 3200 шагов на оборот.
Однако на практике для большинства двигателей повышение дробления шага больше 1/8 не дает существенного прироста реального разрешения из-за механических ограничений конструкции двигателя. Поэтому чрезмерное повышение дробления шага обычно нецелесообразно.

Основные преимущества микрошагового режима
Микрошаговый режим работы шагового двигателя имеет ряд важных преимуществ:
- Значительное снижение вибраций и шума при работе двигателя, особенно на низких скоростях
- Повышение плавности движения, что важно для многих прецизионных применений
- Устранение резонансных явлений на низких частотах вращения
- Возможность более точного позиционирования ротора
- Снижение рывков при старте и остановке двигателя
Благодаря этим преимуществам микрошаговый режим часто применяется в системах точного позиционирования, 3D-принтерах, станках с ЧПУ и других механизмах, где требуется плавное и точное движение.
Недостатки и ограничения микрошагового режима
Несмотря на все преимущества, у микрошагового режима есть и ряд недостатков:
- Снижение максимального момента, развиваемого двигателем (примерно на 30% по сравнению с полношаговым режимом)
- Уменьшение максимально достижимой частоты вращения двигателя
- Усложнение схемы управления двигателем
- Повышение энергопотребления системы управления
Кроме того, существуют ограничения по реальному повышению точности позиционирования. Из-за механических несовершенств конструкции двигателя, люфтов и трения фактическая точность позиционирования обычно ниже теоретической.

В каких случаях целесообразно применение микрошагового режима
Микрошаговый режим целесообразно применять в следующих случаях:
- Когда требуется высокая плавность движения, особенно на низких скоростях
- Для снижения вибраций и шума при работе механизма
- В системах точного позиционирования для повышения разрешающей способности
- Для устранения резонансных явлений на определенных частотах вращения
- Когда необходимо снизить рывки при старте и остановке двигателя
При этом следует учитывать, что микрошаговый режим не всегда оправдан. В некоторых применениях его недостатки могут перевесить преимущества.
Выбор оптимального режима дробления шага
Выбор оптимального режима дробления шага зависит от конкретной задачи и характеристик системы. Как правило, рекомендуется использовать максимальное дробление шага, при котором:
- Достигается требуемая плавность и точность движения
- Обеспечивается необходимый момент на валу двигателя
- Достигается требуемая максимальная скорость вращения
- Не превышаются ограничения системы управления по частоте генерации импульсов
Чаще всего оптимальным является режим дробления 1/8 или 1/16. Дальнейшее увеличение дробления обычно не дает существенных преимуществ, но увеличивает нагрузку на систему управления.

Особенности реализации микрошагового режима в современных драйверах
Современные драйверы шаговых двигателей реализуют микрошаговый режим с использованием цифровых технологий. Это позволяет достичь высокой точности формирования токов в обмотках и обеспечить гибкость настройки.
Некоторые драйверы, например серии Leadshine, используют особую технологию — они всегда работают с максимальным дроблением шага внутри драйвера, независимо от установленного внешнего режима. Это позволяет добиться максимальной плавности движения при любых настройках.
Также в современных драйверах часто реализуются алгоритмы автоматического переключения режимов дробления шага в зависимости от скорости вращения. На низких скоростях используется максимальное дробление для обеспечения плавности, а на высоких — оно уменьшается для достижения максимальной скорости.
Дробление шага шагового двигателя
Для того, чтобы понять плюсы и минусы дробления шага (работы шагового двигателя в микрошаговом режиме), сначала стоит разобраться, что же это такое.
Микрошаговый режим – это режим, при котором происходит дробление шага большее чем 1/2 за счет получения плавно вращающегося поля статора, т.е. ток плавно снижается на одной обмотке и плавно нарастает на другой. Благодаря этому ротор шагового двигателя теоретически можно зафиксировать в любой произвольной позиции, если установить правильное отношение токов в обмотках (фазах).
Из графика видно, что увеличивая дробление шага мы дискретно приближаемся к изменению значений токов в
обмотках по
закону Sin, со сдвигом фаз π/2.
купить шаговый двигатель
купить блок управления шаговым двигателем
Теоретически, благодаря микрошаговому режиму, мы можем повысить разрешение шагового двигателя. Например, взяв двигатель с углом поворота ротора 1.8° (200 шагов на оборот), при микрошаговом режиме 1/8 получаем 800 шагов на оборот, при дроблении 1/16 – 3200 шагов на оборот и так далее. На практике же, для большинства используемых шаговых двигателей, повышение дробления шага больше 1/8 не дает ожидаемого повышения разрешения двигателя. Это происходит из-за несовершенства деталей шагового двигателя, инерции ротора, силы трения и ряда других причин.
Но, помимо увеличения разрешающей способности шагового двигателя, микрошаговый режим помогает значительно
снизить
вибрации и избежать резонанса на низких частотах вращения шагового двигателя, это получается благодаря
меньшей длине
между двумя соседними положениями ротора, что снижает влияние инерционных характеристик.
Ниже приведен результат испытаний связки шаговый двигатель + блок управления SMD 4.2 CAN в динамометрическом стенде.
Из графиков можно сделать вывод, что дробление шага отрицательно сказывается на величине максимального
момента
двигателя, но положительно влияет на его равномерность (особенно это видно при режиме 1/128). Так же
микрошаг сильно
снижает максимальное количество оборотов в минуту, которое может выдать шаговый двигатель. Это происходит
из-за того,
что с увеличением дробления шага, растет количество переключений напряжения, подаваемого на обмотки, что
ведет к росту
потерь. Поэтому в драйверах нового поколения SMD-4.2i разгон и торможение двигателя происходит в
микрошаговых режимах,
а при увеличении скорости драйвер автоматически понижает дробления шага в момент, когда текущее дробление не
дает
преимуществ над меньшим дроблением для данной частоты вращения ротора шагового двигателя.
Можно подвести итог, обозначив плюсы и минусы работы шагового двигателя в микрошаговом режиме.
Плюсы:
- повышение разрешающей способности;
- значительное снижение вибраций;
- значительное снижение шума;
- выравнивание момента;
- избегание резонанса.
Минусы:
- снижение максимальной частоты вращения ротора;
- снижение максимального момента шагового двигателя.
Василий Фортуна, Сергей Сергеев
Микрошаговый режим (микрошаг) шагового двигателя
Микрошаг шагового двигателя
Микрошаг — режим деления шага, при работе в котором обмотки шагового двигателя в каждый момент времени запитаны не полным током, а его уровнями, изменяющимися по закону sin в одной фазе и cos во второй.
Такой метод дает возможность фиксировать вал в промежуточных положениях между шагами.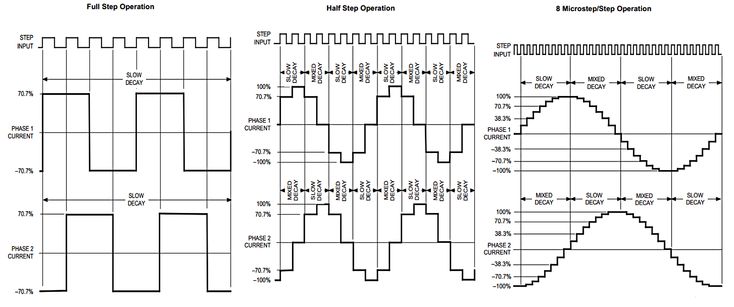 Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:8 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/8 полного шага, и для полного оборота вала потребуется подать в 8 раз больше импульсов, чем для режима полного шага.
Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:8 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/8 полного шага, и для полного оборота вала потребуется подать в 8 раз больше импульсов, чем для режима полного шага.
Применение микрошагового режима
У микрошагового режима может быть несколько применений.
Вначале разберем несколько заблуждений относительно микрошага:
- Микрошаг позволяет увеличить точность привода.
На самом деле это не так. Во-первых, этому мешает геометрическая неидеальность ротора и статора двигателя, неидеальные обмотки, зазоры в подшипниках вала и т.п. В результате двигатель выполняет шаги всегда с некоторой погрешностью(как правило, 5% от величины полного шага), причем абсолютное значение погрешности постоянно для любого выбранного микрошагового режима! Кроме того, во многих драйверах управление двигателем также далеко от идеального, что приводит к дополнительной неравномерности перемещения в режиме микрошага. Дальнейшее деление шага более чем на 5-10 микрошагов приводит только к увеличению разрешающей способности привода, но не точности. То есть вы сможете более дискретно задавать позицию в ЧПУ системе, но не сможете её получить с заданной точностью.
Дальнейшее деление шага более чем на 5-10 микрошагов приводит только к увеличению разрешающей способности привода, но не точности. То есть вы сможете более дискретно задавать позицию в ЧПУ системе, но не сможете её получить с заданной точностью. - Микрошаг значительно снижает момент двигателя(относительно полношагового режима).
Момент действительно снижается. Однако, использование микрошага одновременно увеличивает плавность хода двигателя, и снижает резонансные явления, что способствует увеличению момента. Два противоположных влияния на момент в среднем более-менее уравновешивают друг друга. В многих случаях применение микрошага на самом деле увеличивает момент, поэтому целесообразность отказа от микрошагового режима должна определяться в каждом конкретном случае.
Основным применением микрошагового режима является борьба с резонансом, снижение вибрации шагового двигателя и повышения плавности хода передачи. Достигается это благодаря тому, что при использовании микрошагового режима на вал мотора действуют более кратковременные усилия разгона-торможения, сам вал совершает шаги меньшей амплитуды, в результате инерционные явления проявлены слабее.
Достигается это благодаря тому, что при использовании микрошагового режима на вал мотора действуют более кратковременные усилия разгона-торможения, сам вал совершает шаги меньшей амплитуды, в результате инерционные явления проявлены слабее.
Выбор оптимального режима деления шага
Оптимальный режим деления шага необходимо выбирать в зависимости от конкретного станка и стоящих задач. Основными факторами являются необходимость снизить резонанс двигателей, уменьшить шум, изменить разрешающую способность станка. В большинстве случаев имеет смысл использовать наибольшее деление шага, при котором станок сможет развивать расчетную максимальную скорость. Ограничением в данном случае будет максимальная частота входных импульсов у драйвера или максимальная частота генерации управляющих импульсов ЧПУ-системой. Скажем, скорость вращения 10 об/сек стандартного двигателя с шагом 1.8 град требует подавать импульсы STEP с частотой 2000 Гц для режима полного шага и с частотой 256 кГц для деления шага 1:128, тогда как, программа Mach4 максимально может генерировать импульсы с частотой 100 кГц.
Микрошаговый режим драйверов Leadshine
Цифровые драйверы Leadshine построены с применением особой технологии — драйверы всегда используют максимальный режим деления шага. Такая технология позволяет добиться максимальной плавности движения при любых установках режима деления шага и максимально устранить вибрации шагового двигателя.
DARXTON
Микрошаг для шаговых двигателей — Советы по линейному движению
Автор Danielle Collins 14 комментариев
Микрошаг — это метод управления шаговыми двигателями, обычно используемый для достижения более высокого разрешения или более плавного движения на низких скоростях.
Шаговые двигатели перемещаются дискретными шагами или долями оборота. Например, шаговый двигатель с углом шага 1,8 градуса сделает 200 шагов за каждый полный оборот двигателя (360 ÷ 1,8). Это дискретное движение означает, что вращение двигателя не идеально плавное, и чем медленнее вращение, тем оно менее плавное из-за относительно большого размера шага. Один из способов смягчить эту нехватку плавности на малых скоростях — уменьшить размер шага двигателя. Вот тут-то и появляется микрошаг.
Один из способов смягчить эту нехватку плавности на малых скоростях — уменьшить размер шага двигателя. Вот тут-то и появляется микрошаг.
Управление микрошагом делит каждый полный шаг на более мелкие шаги, чтобы помочь сгладить вращение двигателя, особенно на малых скоростях. Например, шаг в 1,8 градуса можно разделить до 256 раз, обеспечивая угол шага 0,007 градуса (1,8 ÷ 256), или 51 200 микрошагов на оборот.
Микрошаг достигается за счет использования напряжения с широтно-импульсной модуляцией (ШИМ) для управления током в обмотках двигателя. Драйвер посылает две синусоидальные волны напряжения, сдвинутые по фазе на 90 градусов, на обмотки двигателя. В то время как ток увеличивается в одной обмотке, он уменьшается в другой обмотке. Эта постепенная передача тока приводит к более плавному движению и более стабильному созданию крутящего момента, чем полное или полушаговое управление.
Микрошаг значительно снижает колебания позиционирования.Изображения предоставлены: Dover Motion Микрошаг также уменьшает колебания скорости.

Изображения предоставлены: Dover Motion
В то время как плавность передачи крутящего момента, низкоскоростное движение и резонанс улучшаются с помощью микрошагов, ограничения в управлении и конструкции двигателя не позволяют им достичь своих идеальных характеристик. В первую очередь это связано с тем, что микрошаговые приводы могут работать только приближает к истинной синусоидальной волне, поэтому некоторая пульсация крутящего момента, резонанс и шум остаются, хотя каждый из них значительно уменьшается по сравнению с полным и полушаговым режимами. Кроме того, крутящий момент шагового двигателя с микрошаговым управлением составляет всего около 70 процентов от крутящего момента, создаваемого с полношаговым управлением.
Микрошаг иногда считается хорошей альтернативой механической передаче, поскольку он не вызывает люфта в системе и не снижает максимальную скорость системы. Однако механическая передача увеличивает крутящий момент двигателя и увеличивает его способность удерживать положение.
Важно избегать того, что иногда называют «пустым разрешением», когда уровень деления шагов (т. е. разрешение) выше практического для системных ограничений. Это чаще всего происходит, когда крутящий момент, создаваемый микрошагом, недостаточен для преодоления момента трения приводимого компонента (например, ходового винта или шарикового винта). Инкрементальный крутящий момент на микрошаг определяется по следующему уравнению:
Где:
T Inc = инкрементный крутящий момент, полученный с каждым микростепом
T HFS = удержание крутящего момента (операция полного шага)
SDR. полный шаг)
Для двигателя с удерживающим моментом 0,35 Нм, использующим коэффициент деления на 256 шагов (SDR), прирост момента, создаваемый каждым микрошагом, будет 0,002 Нм.
Если момент трения винта составляет 0,06 Нм, потребуется 30 микрошагов (0,06 ÷ 0,002), чтобы создать достаточный крутящий момент, чтобы заставить винт двигаться. Кроме того, работа с большим количеством шагов на оборот требует более высокой частоты последовательности импульсов, приводящей в движение двигатель. Использование 256 SDR в предыдущем примере означает, что двигатель делает 51 200 шагов или импульсов за оборот (200 полных шагов за оборот x 256 микрошагов за шаг). При скорости двигателя 100 об/с (6000 об/мин) необходимая частота импульсов составляет более 5 МГц.
Кроме того, работа с большим количеством шагов на оборот требует более высокой частоты последовательности импульсов, приводящей в движение двигатель. Использование 256 SDR в предыдущем примере означает, что двигатель делает 51 200 шагов или импульсов за оборот (200 полных шагов за оборот x 256 микрошагов за шаг). При скорости двигателя 100 об/с (6000 об/мин) необходимая частота импульсов составляет более 5 МГц.
Изображение предоставлено: Oriental Motor USA Corp. Привлекательность двухфазного шагового двигателя с микрошаговым управлением неотразима. В вашем воображении вспыхивают образы микрошагов, гибридного шагового двигателя с шагом 1,8 градуса и 256 микрошагов на полный шаг. Вас привлекает разрешение 51 200 микрошагов на оборот. Вы рады, что не владеете акциями компаний, занимающихся кодированием высокого разрешения. Скачать Пунктирная линия: соответствующий отклик для точного микрошагового позиционирования. Реальный компромисс заключается в том, что по мере увеличения количества микрошагов на полный шаг, ПРИРАБОТОЧНЫЙ крутящий момент на микрошаг резко падает. Разрешение увеличивается. Однако пострадает точность. Немногие шаговые двигатели имеют чисто синусоидальную зависимость крутящего момента от положения вала, и все они имеют гармоники более высокого порядка, которые искажают кривую и влияют на точность (см. график ниже). Несмотря на то, что микрошаговые приводы прошли долгий путь, они по-прежнему лишь приближаются к истинной синусоиде. Также важно отметить, что любой крутящий момент нагрузки приведет к «магнитному люфту», смещающему ротор из предполагаемого положения до тех пор, пока не будет создан достаточный крутящий момент. Фактическое выражение для инкрементного крутящего момента для одного микрошага равно 1.: Инкрементальный крутящий момент для N микрошагов равен 2.: Где: μ PFS = количество микрошагов на полный шаг [целое число] В Таблице 1 наглядно представлена количественная оценка значительного влияния прироста крутящего момента на микрошаг в зависимости от количества микрошагов на полный шаг. Полный шаг считается одним микрошагом на полный шаг для уравнений 1 и 2. Следствием этого является то, что если момент нагрузки плюс трение двигателя и фиксирующий момент больше, чем инкрементный момент микрошага, последовательные микрошаги должны быть реализованы до тех пор, пока накопленный крутящий момент не превысит момент нагрузки плюс трение двигателя и фиксирующий момент. Точность и разрешение Что делать, если двигатель не нагружен? Думаете об использовании микрошага для какого-либо типа наведения или инерциального позиционирования? Что ж, у шагового двигателя все еще есть момент трения из-за его подшипников, и у него есть фиксирующий момент (в дополнение к другим гармоническим искажениям). Вам придется «накрутить» достаточный добавочный крутящий момент, чтобы преодолеть трение в подшипнике. Еще более разрушительным, чем трение в подшипнике, является фиксирующий момент, который обычно составляет от 5 до 20% удерживающего момента. микрошагов: мифы и реальность | Учебник FAULHABER
Крутящий момент в зависимости от положения вала
 Синяя линия: искаженные кривые.
Синяя линия: искаженные кривые. Где подвох?
N = количество сделанных микрошагов [целое число]
N Меньше или равен μ PFS
M HFS = Удерживание крутящего момента [NM]
M INC = Incremental Corte на Microstep [NM]
888888888 гг. N = Инкрементальный крутящий момент для N Микрошаги [Нм]
N = Инкрементальный крутящий момент для N Микрошаги [Нм]
N Меньше или равно μ PFS Инкрементальный крутящий момент на микрошаг/полный шаг
Инкрементальный крутящий момент на микрошаг по мере увеличения количества микрошагов на полный шаг
Что это значит?
 Проще говоря, микрошаг не означает, что двигатель действительно будет двигаться. Если желательно изменение направления, может потребоваться значительное количество микрошагов, прежде чем произойдет движение. Это связано с тем, что крутящий момент на валу двигателя должен быть уменьшен с любого положительного значения, которое он имеет, до отрицательного значения, которое будет иметь достаточный крутящий момент, чтобы вызвать движение в отрицательном направлении.
Проще говоря, микрошаг не означает, что двигатель действительно будет двигаться. Если желательно изменение направления, может потребоваться значительное количество микрошагов, прежде чем произойдет движение. Это связано с тем, что крутящий момент на валу двигателя должен быть уменьшен с любого положительного значения, которое он имеет, до отрицательного значения, которое будет иметь достаточный крутящий момент, чтобы вызвать движение в отрицательном направлении. Иногда фиксирующий крутящий момент добавляется к общему генерируемому крутящему моменту. Однако он также может вычитаться из генерируемого крутящего момента. В любом случае, это разрушает вашу общую точность. Действительно, некоторые производители изготавливают «микрошаговые» версии своих двигателей. В стандартных конструкциях двигателей усилия обычно направлены на уменьшение фиксирующего момента. Это может происходить за счет удержания крутящего момента, чтобы приблизить крутящий момент к положению ротора к синусоиде, а также улучшить линейность крутящего момента по отношению к току. Эти усилия уменьшают, но не устраняют компромиссы, связанные с микрошагом в отношении точности. Только определенные магнитные конструкции (такие как Faulhaber DM1220 или DM52100R) по своей сути не имеют фиксирующего момента. Как насчет использования справочной таблицы для «корректировки» неточностей в двигателе и микрошаговом приводе? Проблема в том, что если крутящий момент нагрузки изменится с момента создания таблицы поиска, результаты могут быть хуже, чем если бы вы не использовали «откалиброванную» таблицу.
Иногда фиксирующий крутящий момент добавляется к общему генерируемому крутящему моменту. Однако он также может вычитаться из генерируемого крутящего момента. В любом случае, это разрушает вашу общую точность. Действительно, некоторые производители изготавливают «микрошаговые» версии своих двигателей. В стандартных конструкциях двигателей усилия обычно направлены на уменьшение фиксирующего момента. Это может происходить за счет удержания крутящего момента, чтобы приблизить крутящий момент к положению ротора к синусоиде, а также улучшить линейность крутящего момента по отношению к току. Эти усилия уменьшают, но не устраняют компромиссы, связанные с микрошагом в отношении точности. Только определенные магнитные конструкции (такие как Faulhaber DM1220 или DM52100R) по своей сути не имеют фиксирующего момента. Как насчет использования справочной таблицы для «корректировки» неточностей в двигателе и микрошаговом приводе? Проблема в том, что если крутящий момент нагрузки изменится с момента создания таблицы поиска, результаты могут быть хуже, чем если бы вы не использовали «откалиброванную» таблицу.
