Какие типы двигателей постоянного тока используются с Arduino. Как работают DC моторы. Для каких проектов подходят разные виды двигателей. Как подключить и управлять DC моторами с помощью Arduino.
Типы двигателей постоянного тока для Arduino
Существует несколько основных типов двигателей постоянного тока (DC моторов), которые часто применяются в проектах с Arduino:
- Обычные коллекторные DC моторы
- Бесщеточные DC моторы
- Шаговые двигатели
- Серводвигатели
- Вибромоторы
Каждый тип имеет свои особенности и области применения. Рассмотрим их подробнее.
Принцип работы DC мотора
Двигатель постоянного тока преобразует электрическую энергию в механическую за счет взаимодействия магнитных полей. Основные компоненты DC мотора:
- Статор — неподвижная часть с постоянными магнитами
- Ротор (якорь) — вращающаяся часть с обмотками
- Коллектор — устройство для подачи тока на обмотки ротора
- Щетки — обеспечивают электрический контакт с коллектором
При подаче напряжения на обмотки ротора возникает магнитное поле, которое взаимодействует с полем статора. Это вызывает вращение ротора. Коллектор обеспечивает постоянное изменение направления тока в обмотках для непрерывного вращения.

Особенности коллекторных DC моторов
Коллекторные двигатели постоянного тока — самый распространенный и доступный тип. Их основные характеристики:
- Простая конструкция
- Низкая стоимость
- Высокий крутящий момент при старте
- Легкое управление скоростью
- Изнашивание щеток и коллектора
- Электромагнитные помехи из-за коммутации
Коллекторные моторы подходят для большинства базовых проектов Arduino, где не требуется высокая точность позиционирования.
Бесщеточные DC моторы: преимущества и недостатки
Бесщеточные двигатели лишены недостатков, связанных с коллектором и щетками. Их особенности:
- Высокая эффективность
- Длительный срок службы
- Отсутствие искрения и помех
- Высокая удельная мощность
- Сложная система управления
- Более высокая стоимость
Бесщеточные моторы применяются в проектах, требующих высокой производительности и надежности, например, в дронах или робототехнике.
Применение шаговых двигателей с Arduino
Шаговые двигатели позволяют осуществлять точное позиционирование. Их ключевые свойства:
- Вращение на заданный угол (шаг)
- Высокая точность позиционирования
- Удержание позиции без потребления энергии
- Низкая скорость вращения
- Сложное управление на высоких скоростях
Шаговые моторы идеально подходят для проектов 3D-принтеров, ЧПУ-станков и других устройств, требующих прецизионного контроля положения.
Особенности серводвигателей для Arduino
Сервоприводы представляют собой систему с обратной связью, включающую двигатель, редуктор и схему управления. Их характеристики:
- Точное позиционирование в заданном диапазоне (обычно 0-180°)
- Высокий крутящий момент
- Простое управление с помощью ШИМ-сигнала
- Ограниченный угол поворота
- Относительно высокая стоимость
Серводвигатели широко применяются в робототехнике, моделизме и автоматизации для точного управления положением.
Вибромоторы: применение в проектах Arduino
Вибромоторы — это небольшие DC моторы с эксцентриком на валу. Их особенности:
- Создание вибрации при вращении
- Компактные размеры
- Низкое энергопотребление
- Простое управление
- Ограниченная мощность
Вибромоторы используются для тактильной обратной связи в носимых устройствах, игровых контроллерах и мобильных гаджетах.

Подключение DC моторов к Arduino
Для управления двигателями постоянного тока с помощью Arduino необходимо учитывать следующее:
- Arduino не может напрямую питать большинство моторов из-за ограниченного тока выходов
- Требуется дополнительный драйвер или моторный шилд
- Необходим отдельный источник питания для двигателей
- Важно правильно подключить защитные диоды
Популярные драйверы для DC моторов: L293D, L298N, DRV8833. Они позволяют управлять направлением и скоростью вращения.
Как подключить коллекторный DC мотор к Arduino?
Базовая схема подключения коллекторного мотора к Arduino через драйвер L293D:
- Подключите выводы Enable и Input драйвера к цифровым пинам Arduino
- Соедините выводы Output драйвера с контактами мотора
- Подайте питание на драйвер и мотор от отдельного источника
- Используйте защитные диоды между выводами мотора
Управление мотором осуществляется подачей HIGH/LOW сигналов на входы драйвера. Скорость регулируется с помощью ШИМ.
Arduino и двигатели||Arduino-diy.com
Одно из самых интересных в хобби-электронике – это использование двигателей для «оживления» ваших проектов.
Однако добавление мотора в ваш проект может оказаться непростой задачей, особенно, если вы до этого с приводами не работали.
Данная статья даст вам понимание принципов работы двигателей различных типов и пояснит многие необходимые нюансы и их особенности.
Принцип работы двигателей
Перед тем как разбираться, как именно моторы работаю, давайте сосредоточимся на том, для чего они используются. Моторы используют электромагнитные силы для обеспечения движения, преобразования электроэнергии в механическую.
Магнитные поля создают силу, которая может перемещать объекты. Каждый магнит имеет магнитное поле с северным и южным полюсом. Если вы попробуете приблизить два северных полюса двух магнитов, они будут отталкиваться. То же самое произойдет, если вы попытаетесь приблизить два южных полюса. Если полюса одинаковые, они будут отталкиваться друг от друга. Если же вы приблизите северный полюс одного с южному полюсу другого магнита, они притянутся с определенным усилием. То есть, противоположные полюса притягиваются друг к другу.
Если же вы приблизите северный полюс одного с южному полюсу другого магнита, они притянутся с определенным усилием. То есть, противоположные полюса притягиваются друг к другу.
Электродвигатель использует свойства магнитов отталкиваться и притягиваться для генерации движения. В обычном электродвигателе два магнита: постоянный и переменный. Переменный магнит называется электромагнитом. Электромагнит создается с помощью пропускания электрического тока через проводник. Постоянный магнит постоянно имеет магнитное поле (северный и южный полюса), а электромагнит генерирует магнитное поле только, когда через него пропускают электрический ток. Сила магнитного поля электромагнита может быть увеличена с помощью повышения тока, проходящего через проводник или методом формирования нескольких обмоток проводника.
В электродвигателе электромагнит устанавливается на ось таким образом, что он может свободно вращаться внутри магнитного поля постоянного магнита. В момент, когда через проводник проходит электрический ток, переменное магнитное поле взаимодействует со статическим магнитным полем магнита, возникают силы отталкивания и притяжения. Это заставляет электромагнит вращаться, возникает движение.
Это заставляет электромагнит вращаться, возникает движение.
Основные узлы электродвигателя:
— Постоянный магнит (магниты), в случае, когда он установлен неподвижно, называется статором;
— внутри статора есть катушка, которая установлена на оси и вращается, называется ротором.
Двигатели постоянного тока
Двигатели постоянного тока (DC motor) во многом являются самыми простыми электродвигателями. Большинство «щеточных» двигателей работают одинаково. Есть ротор и статор. Есть магниты на статоре и катушка на роторе с магнитным полем, которое генерируется с помощью подачи на нее силы тока. Есть щетки внутри мотора, которые заставляют двигаться ротор.
При использовании источника постоянного тока, для управления подобным двигателем практически ничего не надо. Скорость его вращения зависит от силы тока, которая поступает на катушки от источника питания к коммутатору.
Для вращения оси двигателя в противоположном направлении, достаточно подключить контакты от источника питания к двигателю наоборот.
Шаговые двигатели
Как и двигатели постоянного тока, шаговые двигатели состоят из ротора и статора. Но, в отличие от других двигателей, ротор шагового двигателя представляет из себя постоянный магнит, который вращается внутри полей, создаваемых электромагнитами. Статор состоит из нескольких катушек, которые расположены в корпусе мотора. Когда ток проходит через катушки, подвижный вал двигателя (который является, по сути, постоянным магнитом) располагается в соответствии с генерируемым электромагнитной катушкой полем. Когда катушки заряжаются в определенной последовательности, вал двигателя выбирает новые положения и, соответственно, начинает вращаться.
Ротор приводится в движение последовательной подачей напряжения на катушки. Шаговый двигатель имеет возможность проворачивать ротор на определенный шаг в зависимости от разрешения импульса.
Шаговые двигатели являются отличным выбором для проектов на Arduino (и не только) по нескольким причинам. Они стоят относительно недорого, у них маленькая погрешность, следовательно – это идеальный выбор для управления с разомкнутой системой управления (без дополнительных датчиков положения рабочего органа). Шаговые двигатели будут обеспечивать заданное положение ротора исключительно в зависимости от поданной силы тока.
Эти двигатели предназначены для вращения в одном и противоположном направлении. Если вы подключите источник питания к контактам шагового двигателя, вал начнет вращаться. Если вы подключите проводники наоборот, он будет вращаться в противоположном направлении. Правда, стоит учесть, что в некоторых шаговых двигателях вращение в противоположную сторону невозможно. Перед его запуском, уточняйте этот момент.
Серводвигатели
Обычные серводвигатели для моделистов используются для поворота и удерживания определенной позиции в диапазоне от 0 до 180 градусов.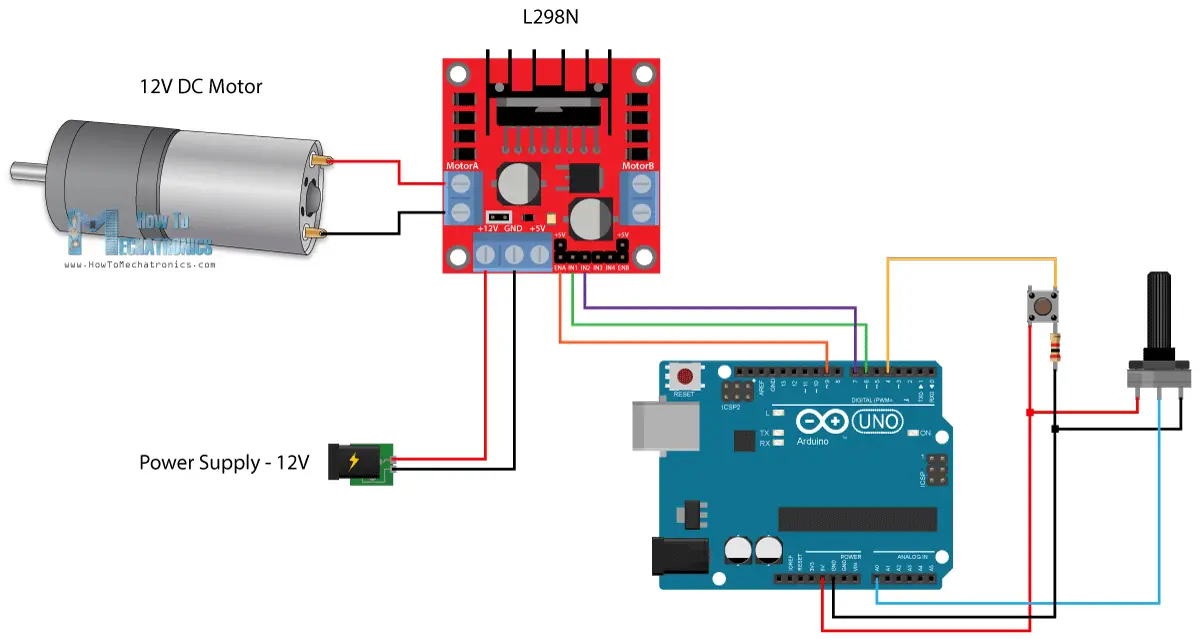 Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
Благодаря этому они находят широкое применение в робототехнике, приводах позиционирования. В производстве серводвигатели используются в модулях рулевого управления автомобилями, лодками, в механизмах фокусировки современных видеокамер.
В большинстве случаем серводвигатели имеют три провода: питание, земля и сигнал. Обычно провод питания красного цвета, земля – черного или коричневого. Сигнал – желтый, оранжевый или белый.
В серводвигателях, которые, например, используются в системах управления радиоуправляемых машин, электродвигатель подключен к потенциометру. Стандартный приемник/передатчик посылает ШИМ-сигналы на серву. Электроника (небольшая плата-контроллер) внутри серводвигателя, переводит ширину импульса в положение. Когда на серву поступает сигнал к повороту, питание будет подаваться на мотор до тех пор, пока потенциометр не достигнет положения, которое будет соответствовать заданному предварительно через приемник/передатчик.
Сигнал управления является цифровым ШИМ сигналом с частотой 50 Гц. Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Каждые 20 миллисекунд подается цифровой импульс управления. Продолжительность (ширина) импульса находится в диапазоне от 1.0 миллисекунды до 2.0 миллисекунд. 1.5 – середина диапазона. Большая ширина импульса может использоваться для дополнительного хода, который выходит за нормальный рабочий диапазон. ШИМ (широтно-импульсная модуляция) сигнал иногда называют ШПМ (широтно-позиционная модуляция), хотя это не корректно.
Импульс шириной 1.5 миллисекунды обычно устанавливает серводвигатель в «нейтральное» положение или 90 градусов. Импульс шириной 1.25 миллисекунд может установить его в 0 градусов, а импульс 1.75 миллисекунды в 180 градусов. Физические ограничения и время для различных серводвигателей могут отличаться, но его нейтральное положение всегда соответствует 1.5 миллисекундам.
Вибрационные двигатели
Вибрационные двигатели часто используются в мобильных устройствах для регистрации наличия движения.
Вибрационные моторы по конструктивному исполнению похожи на большинство шаговых двигателей и двигателей постоянного тока. Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать.
Интенсивность вибрации зависит как от размеров двигателя, так и от размеров эксцентрика.
Отличием является то, что на конце ротора установлен эксцентрик. При движении ротора, эксцентрик заставляет механизм внутри корпуса двигателя вибрировать.
Интенсивность вибрации зависит как от размеров двигателя, так и от размеров эксцентрика.
На видео сверху показан мотор, установленный на металлической основе. Обратите внимание, как лист металла совершает волновые движения под действием вибрации вибрационного мотора.
Как выбрать двигатель для проекта
Выбор типа двигателя для вашего проекта зависит от того, что именно вы собираетесь автоматизировать. Если вы хотите установить камеру и обеспесить ее поворот влево-вправо, идеальным выбором будет серводвигатель. Если вы передаете движение на зубчатые колеса с необходимостью обеспечения реверса, лучшим выбором станет шаговый двигатель.
Естественно, отличным выбором для управления вашим двигателем станет плата Arduino или ее клоны.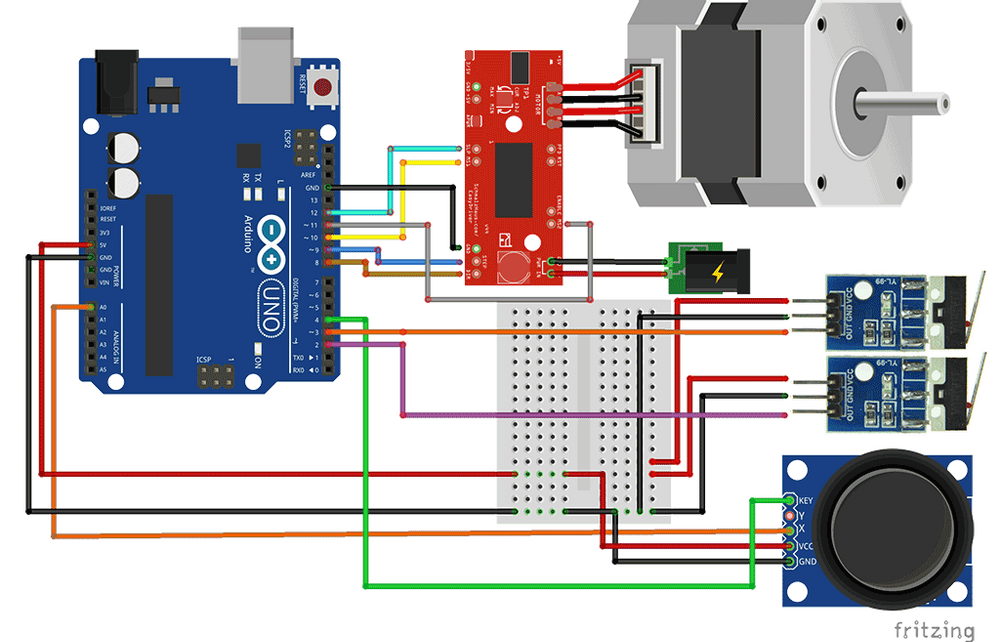 Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Отличительной позитивной чертой данных плат является то, что их пины могут быть использованы для комплексных проектов, включая дополнительное подключение к двигателям датчиков, систем контроля и т.п.
Дальше в статье приведена информация о том, как можно быстро «оживить» выбранный вами предварительно двигатель с использованием платы Arduino.
Использование шагового двигателя с Arduino
Стоит отметить, что «оживлять» свои проекты с помощью плат Arduino и оболочки Arduino IDE для их программирования очень легко из-за наличия большого количества уже готовых библиотек. Подключение шагового двигателя к плате Arduino отличается от подключения двигателя постоянного тока. Существует специальная библиотека и функция, встроенные в Arduino IDE. Более детально об этом вы можете почитать здесь.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Stepper -> stepper_oneRevolution
Данная программа дает возможность управлять уни- или биполярным шаговым двигателем после его подключения к цифровым пинам 8-11 на плате Arduino. После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
После загрузки скетча на плату Arduino, шаговый двигатель должен сделать один оборот по часовой стрелке, после этого – один поворот против часовой стрелки.
Данный пример – отличное начало. Естественно, вы можете вносить свои коррективы в программу, подстраивая ее под свои задачи. Задержка указывается в миллисекундах, так что если вы не хотите выдерживать паузу между оборотами, можете выставить задержку delay(10). Или, для того, чтобы замедлить вращение можете изменить stepsPerRevolution и присвоить ему значение, например, (1000000).
Изменения скетча зависят от того, что именно вы хотите реализовать. Для лучшего понимания того, как именно происходит обмен данными между шаговым двигателем и платой Arduino, советую поэкспериментировать с другими примерами.
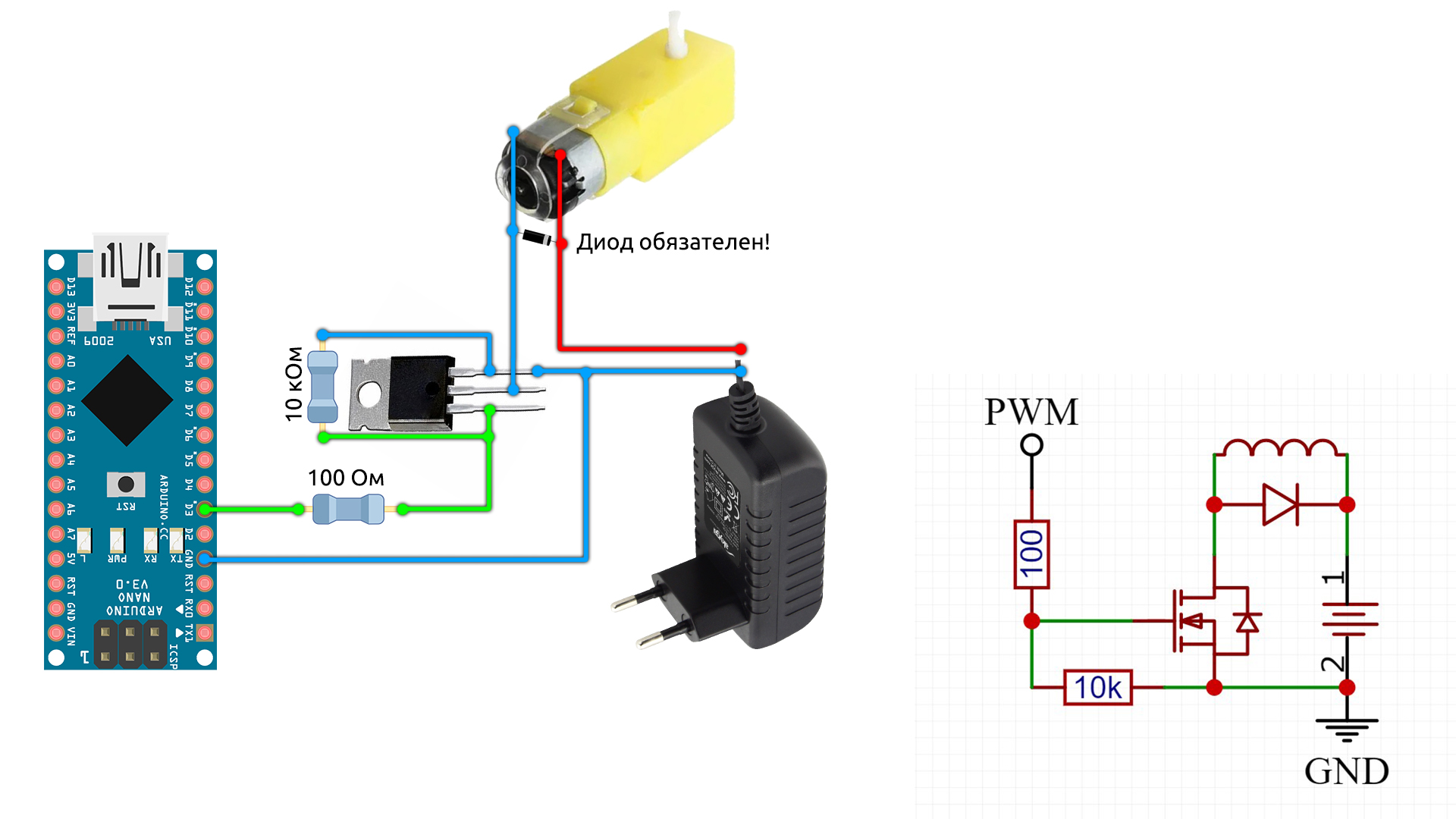
Использование двигателя постоянного тока / вибрационного двигателя с Arduino
В некоторых проектах нет смысла использовать микропроцессоры вроде Arduino. Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
Например, если вы делаете игрушку для ребенка (или взрослого) и хотите установить в нее вибрационный двигатель, гораздо эффективнее и лучше использовать простую кнопку для запуска двигателя.
В таком случае, мотор будет подключатся непосредственно к вашему источнику питания через выключатель, который соединен с позитивным коннектором вашего двигателя.
Использование серводвигателя с Arduino
Так же как и шаговые двигатели, для работы серводвигателей в оболочке Arduino IDE есть встроенная библиотека.
После открытия Arduino IDE, перейдите в меню во вкладку
File -> Examples -> Servo -> Knob
Данная программа обеспечивает управление серводвигателем, который подключен к 9-му ШИМ пину платы Arduino. Потенциометр, в свою очередь, подключен к аналоговому пину 0 и обеспечивает управление положением серводвигателя, посылая напряжение, пропорциональное сопротивлению на пин А0 платы Arduino. Скетч, который «залит» в плату Arduino, интерпретирует сигнал в импульсы, которые посылаются на серводвигатель. Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Двигатель обеспечивает поворот вала в соответствии с положением «крутилки» потенциометра.
Мотор DC 3V-6V два вала
fix:
г. Архангельск, ул. Иоанна Кронштадтского, д. 16:
— отсутствует
г. Астрахань, ул. Савушкина, д. 46:
— отсутствует
г. Волгоград, ул. Рабоче-Крестьянская, д. 14:
— мало
г. Воронеж, ул. Фридриха Энгельса, д. 56:
— мало
г.
— отсутствует
г. Екатеринбург, ул. Уральская, д. 3:
— мало
г. Иваново, проспект Ленина, д.9:
— отсутствует
г. Ижевск, ул. Вадима Сивкова, д.150, ТЦ Европа:
— достаточно
г. Казань, ул. Декабристов, д. 158:
— отсутствует
г. Казань, ул. Спартаковская, д. 2, ТК «Караван галерея»:
— мало
г. Калининград, ул. Генерала Соммера, дом 9-11:
Калининград, ул. Генерала Соммера, дом 9-11:
— отсутствует
г. Кемерово, ул. Пролетарская, д.3:
— мало
г. Кострома, ул. Советская, д. 119, пом. 48:
— отсутствует
г. Краснодар, ул. Коммунаров, д. 102:
— отсутствует
г. Краснодар, ул. Тургенева д 35/1:
— отсутствует
г. Красноярск, ул. Вавилова, д.1, стр.39, ТК «Атмосфера», пав. 11:
— отсутствует
г.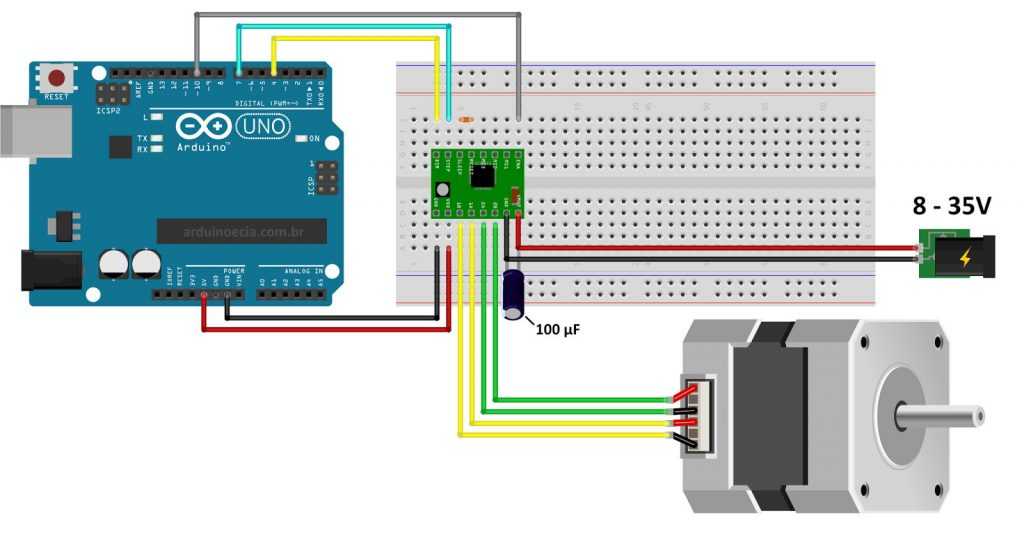 Москва, Багратионовский пр-д, 7, ТЦ «Горбушкин Двор», пав. С2-006а:
Москва, Багратионовский пр-д, 7, ТЦ «Горбушкин Двор», пав. С2-006а:
— отсутствует
г. Москва, Варшавское шоссе, вл. 132/2, пав. М-1:
— мало
г. Москва, Пятницкое ш., 18, ТК «Митинский радиорынок», пав. 401/402, 1-й этаж:
— отсутствует
г. Москва, ул. Генерала Белова, д. 29, ТЦ Фея:
— отсутствует
г. Москва, ул. Профсоюзная, 56, ТЦ «Черемушки», пав. 1Г14:
— отсутствует
г. Москва, ул. Сущевский вал, д. 5 стр. 12, пав. Л-140:
Сущевский вал, д. 5 стр. 12, пав. Л-140:
— отсутствует
г. Москва, ул. Сущевский вал, д. 5 стр. 20, ТЦ «Савеловский», пав. К-3:
— мало
г. Набережные Челны, Московский проспект, д. 126А, ТК «Кама»:
— отсутствует
г. Нижний Новгород, ул. Композитора Касьянова, д. 6 Г, модуль 4, отдел Е1:
— отсутствует
г. Нижний Новгород, ул.Советская, д. 12:
— отсутствует
г. Новокузнецк, проспект Курако, д. 16:
16:
— отсутствует
г. Новосибирск, ул. Крылова 26, ТЦ Москва:
— отсутствует
г. Омск, пр-т Карла Маркса. д. 29 А:
— отсутствует
г. Пенза, ул. Володарского 78 (угол с ул. Бакунина, д.62):
— мало
г. Пермь, ш. Космонавтов, 10А:
— мало
г. Ростов-на-Дону, ул. Серафимовича, д. 50:
— мало
г. Рязань, пр-т Первомайский, дом 21/24:
Рязань, пр-т Первомайский, дом 21/24:
— мало
г. Самара, ул. Победы д. 105:
— отсутствует
г. Самара, ул. Победы, д. 81 (вход с ул. Средне-Садовая):
— мало
г. Санкт-Петербург, Большая Разночинная ул., д.6:
— мало
г. Санкт-Петербург, Московский пр., д.193:
— мало
г. Санкт-Петербург, пр. Энгельса, д.137, лит А:
— отсутствует
г. Санкт-Петербург, ул, Дыбенко, д.20, к.1:
Санкт-Петербург, ул, Дыбенко, д.20, к.1:
— отсутствует
г. Санкт-Петербург, ул. Ильюшина, д. 8:
— мало
г. Санкт-Петербург, ул. Марата, д. 22-24:
— отсутствует
г. Саратов, ул. Московская, д. 106:
— мало
г. Смоленск, ул. Беляева, д. 6:
— отсутствует
г. Ставрополь, ул. Лермонтова, д. 193:
— отсутствует
г.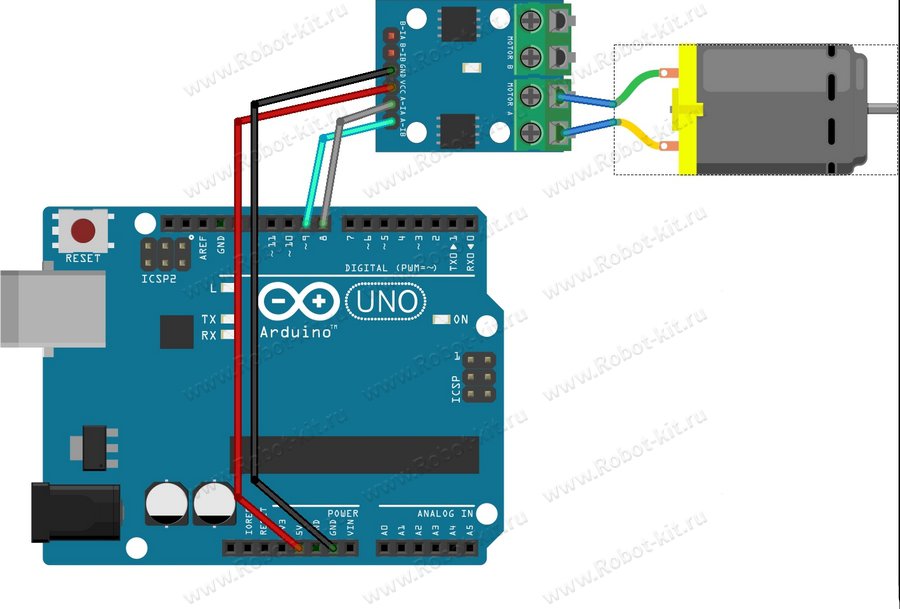 Тольятти, ул. Революционная, д. 52, ТД ДБ «Орбита», 1 этаж, 111 секция:
Тольятти, ул. Революционная, д. 52, ТД ДБ «Орбита», 1 этаж, 111 секция:
— отсутствует
г. Тюмень, ул. Герцена, д.95А:
— отсутствует
г. Уфа, ул. Комсомольская, д. 15 (вход со стороны ул. Бессонова):
— отсутствует
г. Чебоксары, ул.Композиторов Воробьевых, д.20, ТРЦ «Дом Мод», 1-й этаж:
— отсутствует
г. Челябинск, проспект Победы, д.162:
— отсутствует
г. Челябинск, ул. Цвиллинга, д.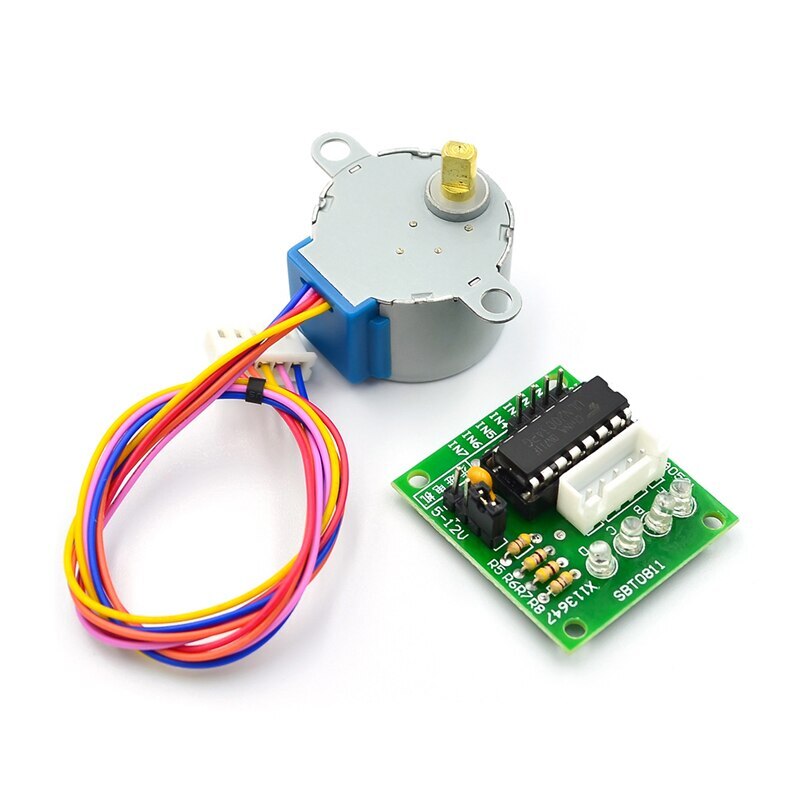 58:
58:
— отсутствует
г. Череповец, ул. Металлургов, д.7:
— отсутствует
г. Ярославль, ул. Свободы, д .13:
— мало
ГО Сочи, г. Адлер, ул. Демократическая 53/А, ТЦ Пассаж:
— отсутствует
ОПТОВЫЙ СКЛАД: г. Москва, 2 хорошевский проезд, д. 7, стр.1:
— отсутствует
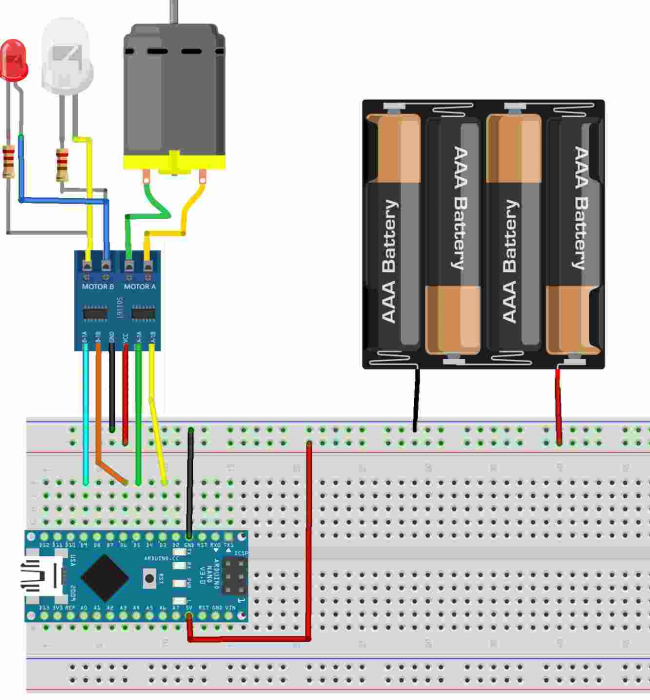
Мотор для машины на основе Arduino.
Характеристики
- Питание от 3 до 12V, рекомендовано питание 6-8V.
- MAX крутящий момент: 800gf cm/min при 3V
- Ток загрузки 70mA (MAX 250mA) (для 3V)
Arduino Nano Motor Carrier — Официальный магазин Arduino
Код: ABX00041 / Штрих-код: 7630049202245
64,80 €
| /
Nano Motor Carrier обеспечивает быстрый и простой способ подключения и управления двигателями в инженерном комплекте R2.
##цена##
Расширьте свои возможности, добавьте в корзину: €0,00
Обзор
Nano Motor Carrier — идеальное дополнение к плате Nano 33 IoT, поскольку оно расширяет и усиливает ее функциональность.
Разработанный для облегчения управления двигателями, Nano Motor Carrier заботится об электронике, необходимой для управления двигателями, позволяя учащимся сосредоточиться на прототипировании и создании своих проектов. Его также можно использовать для подключения других исполнительных механизмов и датчиков через серию 3-контактных штекерных разъемов. Особенности платы: встроенный 9-осевой акселерометр, гироскоп и магнитометр. Он включает в себя зарядное устройство для одноэлементных литий-ионных аккумуляторов и содержит 2 порта для подсчета квадратурного энкодера.
Чтобы использовать держатель, просто подключите его к плате Nano 33 и установите двигатели, необходимые для вашего проекта. После подключения подключите USB-кабель к Nano 33 IoT. Загрузите библиотеку Arduino Motor Carrier из менеджера библиотек, и все готово для начала программирования и управления двигателями с помощью драйверов двигателей.
Загрузите библиотеку Arduino Motor Carrier из менеджера библиотек, и все готово для начала программирования и управления двигателями с помощью драйверов двигателей.
При работе с двигателями вам нужен внешний источник питания для питания драйверов двигателей и питания двигателей. Это можно сделать, подключив 1-элементную литий-ионную батарею к разъему батареи или используя внешний источник питания.
Технические характеристики
|
Микроконтроллер |
ATSAMD11 (ARM Cortex-M0+ @48 МГц) |
| Драйверы двигателей (x4) | МП6522 |
| Макс. входное напряжение (клеммы питания) | 4 В (литий-ионный аккумулятор 1S) |
| Максимальный выходной ток на привод двигателя | 500 мА |
| Выходное напряжение драйвера двигателя | 12 В |
| Защита от перегрева (для приводов двигателей постоянного тока) | Да |
| Зарядка аккумулятора | Да |
| Максимальный ток зарядки аккумулятора | 500 мА (настраиваемый) |
| Клеммы питания (разъемы) | Клеммный блок XT-30 и 2POS |
| Разъем сервопривода | 4 клеммы |
| Входы энкодера | 2 порта |
| Управление двигателем постоянного тока | 4 порта |
| Вход/выход цифрового/аналогового датчика 3 В | 4 порта |
| ИМУ | BNO055 9-осевой Acc/Gyr/Mag |
Документация
OSH: Схемы
Arduino Nano Motor Carrier — это оборудование с открытым исходным кодом! Вы можете создать свою собственную плату, используя следующие файлы:
СХЕМЫ В .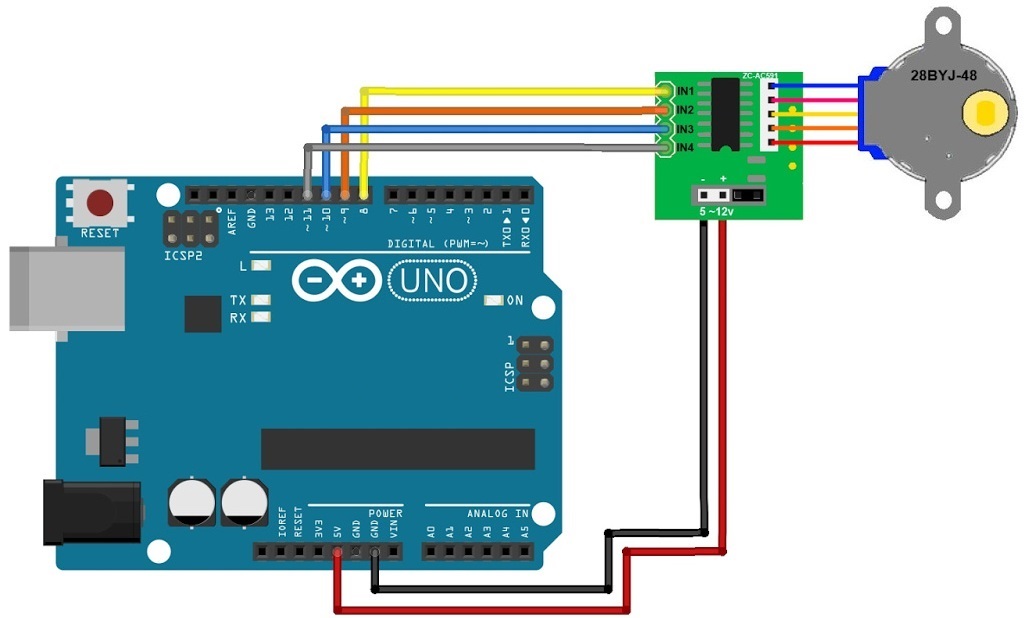 PDF
PDF
Узнать больше
- ARDUINO DOCS Для получения полной технической документации, руководств и многого другого посетите Arduino Docs
Получите вдохновение
##заголовок## ##субтитры##
##текст##
читать далееИспользование MATLAB и Arduino для управления двигателем — видео
В этой демонстрации мы увидим, как управлять двигателями с помощью пакета поддержки MATLAB для Arduino. Что касается программного обеспечения, у меня есть MATLAB и пакет поддержки MATLAB для Arduino, предварительно установленные на моей машине. Если у вас не установлен пакет поддержки, вы можете перейти на вкладку надстроек и нажать «Получить пакеты поддержки оборудования», чтобы загрузить и установить пакет поддержки. Что касается оборудования, у меня есть Arduino Due, Motor Party Pack для Arduino, аккумулятор постоянного тока и кабель USB Micro-b.
Чтобы следовать этой демонстрации и выполнить соединения, которые у меня есть, подключите штырек Servo 1 на Motor Shield к серводвигателю. И один контакт к двигателю постоянного тока, а контакты M3 и M4 к шаговому двигателю. Важно отметить, что аккумуляторная батарея постоянного тока необходима для управления двигателем постоянного тока и шаговым двигателем. Подключите аккумуляторную батарею постоянного тока к контакту питания. Конец Micro-b кабеля должен быть подключен к порту программирования на Due, а конец USB — к ПК, на котором установлен MATLAB. Для получения более подробной инструкции о том, как выполнить подключение, перейдите по этой ссылке.
И один контакт к двигателю постоянного тока, а контакты M3 и M4 к шаговому двигателю. Важно отметить, что аккумуляторная батарея постоянного тока необходима для управления двигателем постоянного тока и шаговым двигателем. Подключите аккумуляторную батарею постоянного тока к контакту питания. Конец Micro-b кабеля должен быть подключен к порту программирования на Due, а конец USB — к ПК, на котором установлен MATLAB. Для получения более подробной инструкции о том, как выполнить подключение, перейдите по этой ссылке.
Теперь, когда мы сделали все необходимые соединения, давайте перейдем к MATLAB и посмотрим, как мы можем управлять двигателями. Для этого я написал скрипт, который собираюсь показать. Функция Arduino в этом скрипте устанавливает соединение с Due, который отключился от COM-порта, упомянутого в первом вводе. Эта функция также предоставляет MATLAB инструкции по библиотекам, которые необходимо включить в серверный код Arduino. Когда я выполняю это в командном окне MATLAB, MATLAB создает объект, представляющий физический объект, к которому он подключен.
После этого дополнительная функция может работать с объектом, созданным для подключения к Motor Shield. Выполнение команды в окне команд и запуск скрипта MATLAB имеют тот же эффект. Так что в оставшейся части этого видео я буду использовать кнопку для перехода к следующему разделу кода после выполнения текущего раздела.
MATLAB создает новый объект в рабочей области каждый раз, когда он подключается к новому физическому объекту. В данном случае Моторный Щит. Здесь, в этом разделе кода, мы должны обратить внимание на функции сервопривода и правильного положения. Функция сервопривода позволяет вам обмениваться данными из MATLAB с серводвигателем, который подключен к номеру порта, указанному во втором входе. Функция правильного положения позволяет вам дать команду серводвигателю переместиться в указанное положение. Здесь я использую 4 цикла для перемещения двигателя от 0 до 180 градусов пять раз назад и вперед. Я прикрепил здесь изображение колеса к серводвигателю, чтобы показать его в действии.