Что такое мотор шилд для Arduino. Как подключить двигатели к Arduino с помощью мотор шилда. Какие возможности дает использование мотор шилда. Как управлять моторами через Arduino и мотор шилд.
Что такое мотор шилд и зачем он нужен
Мотор шилд — это плата расширения для Arduino, которая позволяет подключать и управлять электродвигателями. Основные функции мотор шилда:
- Обеспечивает питание двигателей от отдельного источника
- Содержит драйверы для управления моторами
- Позволяет Arduino управлять скоростью и направлением вращения моторов
- Дает возможность подключить несколько двигателей
Без мотор шилда напрямую подключить моторы к Arduino нельзя, так как выходной ток пинов микроконтроллера слишком мал для питания двигателей. Мотор шилд решает эту проблему, являясь промежуточным звеном между Arduino и моторами.
Популярные модели мотор шилдов
На рынке представлено множество моделей мотор шилдов от разных производителей. Наиболее популярные варианты:

- Arduino Motor Shield — официальный шилд от Arduino
- Adafruit Motor Shield V2 — улучшенная версия от Adafruit
- DFRobot L298P Motor Shield — недорогой и функциональный вариант
- Seeed Motor Shield V2.0 — поддерживает до 4 DC моторов
При выборе стоит обращать внимание на количество поддерживаемых моторов, максимальный ток, наличие дополнительных функций.
Подключение мотор шилда к Arduino
Процесс подключения мотор шилда к Arduino достаточно прост:
- Установите мотор шилд сверху на Arduino, совместив все пины
- Подключите внешний источник питания к клеммам мотор шилда
- Подсоедините моторы к выходным клеммам на шилде
- Загрузите скетч для управления в Arduino
Важно использовать отдельный источник питания для моторов, а не питать их от Arduino. Это обеспечит стабильную работу и защитит микроконтроллер.
Возможности управления моторами через шилд
Мотор шилд предоставляет широкие возможности для управления подключенными двигателями:
- Включение/выключение моторов
- Изменение скорости вращения (ШИМ)
- Смена направления вращения
- Плавный разгон и торможение
- Синхронное управление несколькими моторами
Все эти функции реализуются программно через скетч Arduino. Библиотеки для популярных шилдов значительно упрощают написание кода управления.
Программирование Arduino для работы с мотор шилдом
Для программирования Arduino и управления моторами через шилд используются специальные библиотеки. Общий алгоритм работы выглядит так:
- Подключение библиотеки в скетче
- Создание объекта мотора
- Инициализация в setup()
- Управление мотором функциями библиотеки в loop()
Пример простого кода для управления DC мотором через Adafruit Motor Shield V2:
«`cpp #includeЭтот код запускает мотор вперед на 1 секунду, затем назад на 1 секунду, и так по кругу. Скорость установлена на 150 (максимум 255).
Подключение различных типов двигателей
Мотор шилды позволяют подключать различные типы электродвигателей:
DC моторы
Коллекторные двигатели постоянного тока — самый простой вариант. Подключаются напрямую к выходам шилда. Управляются изменением полярности и ШИМ.

Шаговые двигатели
Требуют последовательного переключения обмоток для вращения. Мотор шилд автоматизирует этот процесс. Подключаются к парам выходов шилда.
Серводвигатели
Некоторые шилды имеют отдельные разъемы для серво. Управляются подачей ШИМ сигнала определенной длительности.
При подключении важно соблюдать полярность и не превышать максимальный ток шилда.
Расширение возможностей: стекирование шилдов
Для проектов, требующих управления большим количеством моторов, применяется техника стекирования — установка нескольких мотор шилдов друг на друга. Это позволяет:
- Увеличить количество подключаемых двигателей
- Распределить нагрузку между шилдами
- Создавать сложные системы управления
Как это работает:
- Шилды устанавливаются друг на друга через специальные стековые разъемы
- Каждому шилду присваивается уникальный адрес
- В скетче создаются отдельные объекты для каждого шилда
- Управление осуществляется через соответствующие объекты
Стекирование позволяет создавать очень сложные роботизированные системы на базе Arduino.

Применение мотор шилдов в робототехнике
Мотор шилды широко применяются в любительской и образовательной робототехнике. Вот несколько популярных проектов с использованием Arduino и мотор шилда:
- Мобильные роботы на колесах или гусеницах
- Манипуляторы и роботизированные руки
- 3D принтеры и ЧПУ станки
- Автоматизированные системы (умный дом)
- Игрушки с движущимися частями
Использование мотор шилда значительно упрощает создание подобных проектов, позволяя сосредоточиться на алгоритмах работы, а не на технических деталях управления двигателями.
Альтернативы мотор шилдам
Хотя мотор шилды очень удобны, существуют и альтернативные способы подключения двигателей к Arduino:
Отдельные драйверы моторов
Можно использовать отдельные микросхемы-драйверы (например, L298N) для каждого мотора. Это дешевле, но требует больше ручной работы по подключению.
Силовые транзисторные ключи
Для простых проектов можно собрать схему управления на транзисторах. Это самый бюджетный вариант, но требует знаний электроники.

Специализированные контроллеры
Для сложных задач иногда используются отдельные контроллеры двигателей со своим процессором, которые общаются с Arduino по шине.
Выбор метода зависит от сложности проекта, бюджета и навыков разработчика. Для большинства любительских и образовательных задач мотор шилд остается оптимальным решением.
Motor Shield Plus
Хотите сделать робота, ЧПУ станок или 3Д-принтер на Arduino? Микроконтроллер управляющей платы не сможет провернуть двигатель даже на градус. Плата расширения Motor Shield Plus поможет подключить коллекторные моторы и шаговые двигатели.
Драйвер моторов выполнен на базе двухканального H-моста L6206Q на полевых транзисторах. Микросхема выдержит пару коллекторных моторов с напряжением питания от 8 до 52 вольт и токе до двух с половиной ампер. Независимые каналы можно объединить в одну цепь и подключить шаговым двигателем с аналогичным потреблением.
Мы предусмотрели возможность определить потребляемый моторами ток. Это не только продлит жизнь двигателей, но и сэкономит батарею устройства.
Подключение
Плата расширения одевается сверху на управляющую платформу методом бутерброда.
Для коммуникации с микроконтроллером используются цифровые контакты управляющей платформы:
| Назначение | Канал 1 | Канал 2 |
|---|---|---|
| Направление | 4 | 7 |
| Скорость | 5 (ШИМ) | 6 (ШИМ) |
| Потребляемый ток | A0 (АЦП) | A1 (АЦП) |
Эти пины подключены через джамперы. Если в вашем устройстве пины уже заняты, снимите джампер и подключитесь к свободному пину управляющей платы.
Если в вашем устройстве пины уже заняты, снимите джампер и подключитесь к свободному пину управляющей платы.
Питание
На плате предусмотрены два контура питания:
- Силовой контур — для питания моторов от силовой части микросхемы H-моста L6206Q. Силовое питание подключается через клеммник PWR.
- Цифровой контур — для питания вспомогательной цифровой логики управления микросхемой L6206Q и светодиодов индикации. Цифровое питание поступает на плату расширения от пина 5V управляющей платы.
Если тока нет хотя бы в одном контуре — Motor Shield работать не будет.
На платформе предусмотрена возможность объединения источников питания. Поставьте джампер, чтобы запитывать управляющую платформу и силовую часть от одного источника.
Световая индикация
Для удобства на Motor Shield’e расположены светодиоды-индикаторы:
- состояние силового питания
- скорость и направление вращения двигателей отдельно по каждому каналу
Комплектация
- 1× плата расширения
- 5× джамперов
Характеристики
- Драйвер моторов: L6206Q
- Количество каналов: 2
- Напряжение логической части: 3,3—5 В
- Напряжение силовой части: 8—12 c PWR JOIN или 8—52 без PWR JOIN
- Продолжительный ток нагрузки на канал: до 2,5 A
- Пиковый ток нагрузки на канал: до 5 А в течении 1 мс
- Измерение потребляемого тока моторов на каждом канале
- Количество каналов 2
- Драйвер моторов L6206Q
- Напряжение логической части 3,3—5 В
- Напряжение силовой части 8—12 c PWR JOIN или 8—52 без PWR JOIN
- Продолжительный ток нагрузки на канал до 2,5 A
- Пиковый ток до 5 А в течении 1 мс
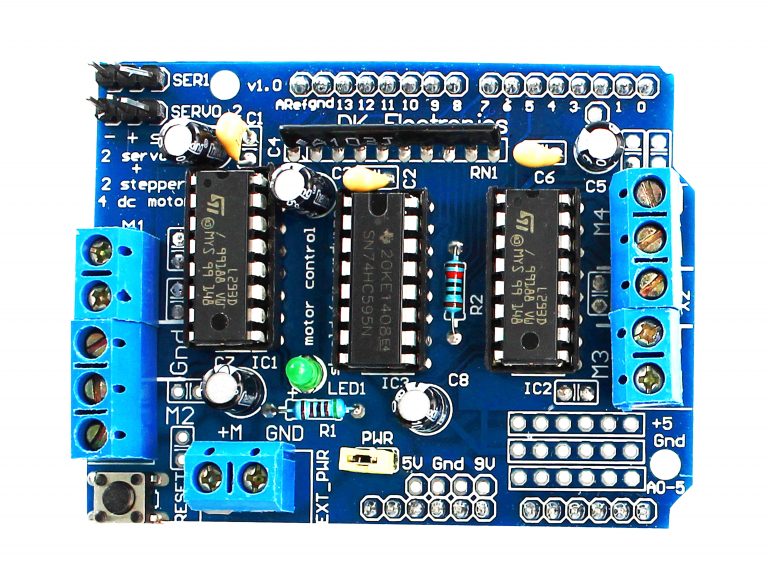
Драйвер моторів Amperka Motor Shield купити в Україні
Amperka Motor Shield
Хочете зробити робота, ЧПУ верстат або 3D-принтер? Без зовнішньої допомоги Arduino або Iskra JS не зможе провернути двигун навіть на градус. Використовуйте плату розширення Motor Shield, яка приймає команди від зовнішнього контролера для подальшого управління двигунами.
Відеоогляд
Особливості
- Сумісність зі всіма контролерами форм-фактора Arduino R3.

- Драйвер виконаний на базі H-мосту L298P
- Управління пару колекторними двигунами або одним кроковим двигуном.
- Можливість живити всю конструкцію від одного джерела напруги.
- Допустима напруга двигунів 5-24 У режимі роздільного харчування і 7-12 У режимі об’єднаного харчування. Максимальний струм на канал 2 А.
- Можливість зміни контактів управління на кожному каналі.
- Світлодіодна індикація напрямку і швидкості двигунів по кожному каналу.
Підключення контролера
Плата розширення Motor Shield передбачена для установки на контролери формфакторов Arduino Uno і Arduino Mega 2560. Для комунікації з мікроконтролером використовуються контакти:
| Контакт | Функція |
|---|---|
| 4 | Напрямок першого каналу |
| 5 | Швидкість першого каналу |
| 6 | Швидкість другого каналу |
| 7 | Напрямок другого каналу |
Підключення навантаження
Навантаження у вигляді двигунів підключається до відведеним клемника M1 і M2.
Харчування
На платі розташовані два контура живлення:
- Силовий контур — для живлення двигунів від силової частини мікросхеми H-мосту L298P. Силове живлення підключається через клемник PWR в діапазоні 5-24 Ст.
- Цифровий контур — для живлення допоміжної цифрової логіки управління мікросхеми H-мосту L298P і світлодіодів індикації. Цифрове харчування надходить на плату розширення від піна 5V керуючої плати.
Якщо струму немає хоча б в одному контурі — Motor Shield працювати не буде. На платі передбачено можливість обійтися єдиним джерелом харчування для всієї збірки в залежності від положення джаммпера PWR JOIN:
- PWR JOIN ON: харчування з гвинтового клемника PWR електрично пов’язане з контактом Vin основного контролера. Діапазон силового напруження 7-12 Ст.
- PWR JOIN OFF: харчування з гвинтового клемника PWR електрично не пов’язане з контактом Vin основного контролера. Діапазон силового напруження 5-24 Ст.
Програмування
Драйверів моторів спілкується з мікроконтролером через цифрові сигнали. Для програмної роботи з платою розширення використовуйте бібліотеки і функції, які полегшують складання коду програми.
Для програмної роботи з платою розширення використовуйте бібліотеки і функції, які полегшують складання коду програми.
- Функція управління піном вводу-виводу для Arduino
- Бібліотека для Espruino
Якщо ви новачок у програмуванні мікроконтролерів, зверніть увагу на освітні набори Матрьошка і Йодо.
Комплектація
- 1× Плата Amerka Motor Shield
- 5× Джампер
Характеристики
- Модель: Amperka Motor Shield / AMP-B001
- Чіп управління: L298P
- Цифрова частина:
- Напруга живлення Vcc1: 3,3–5 В
- Споживаний струм Icc1: до 50 мА
- Сумісність: контролери Arduino R3
- Програмний інтерфейс: цифровий двійковий сигнал
- Логічне напруга рівнів:
- Вхід: 3,3–5 В
- Вихід: не використовується
- Силова частина:
- Напруга живлення Vcc2: 7-12 c PWR JOIN / 5-24 без PWR JOIN
- Споживаний струм Icc2: до 2 A на канал
- Кількість підключаються моторів: 2 колекторних або 1 кроковий
- Роз’єм підключення моторів: клемник під гвинт
- Роз’єм підключення живлення: клемник під гвинт
- Розміри: 69×53×18 мм
Ресурси
- Керівництво по використанню
Бібліотеки
- Бібліотека для Arduino
- Бібліотека для Espruino
Проекти
- Ігровий автомат «Капітан Крюк»
Документація
- Datasheet на мікросхему L298P
Arduino Motor Shield Rev3 — Официальный магазин Arduino
Код: A000079 / Штрих-код: 7630049200371
24,00 €
| /
Плата Arduino Motor Shield позволяет Arduino управлять двигателями постоянного тока и шаговыми двигателями, реле и соленоидами.
##цена##
Расширьте свои возможности, добавьте в корзину: €0,00
Обзор
Arduino Motor Shield основан на L298 (техническое описание), который представляет собой сдвоенный мостовой драйвер, предназначенный для управления индуктивными нагрузками, такими как реле, соленоиды, двигатели постоянного тока и шаговые двигатели. Он позволяет управлять двумя двигателями постоянного тока с помощью платы Arduino, независимо контролируя скорость и направление каждого из них. Помимо прочего, вы также можете измерить потребляемый ток каждого двигателя. Экран совместим с TinkerKit, что означает, что вы можете быстро создавать проекты, подключая модули TinkerKit к плате.
Начало работы
В разделе «Начало работы» вы можете найти всю информацию, необходимую для настройки платы, использования программного обеспечения Arduino (IDE) и начала работы с программированием и электроникой.
Нужна помощь?
- О программном обеспечении на форуме Arduino
- О проектах на форуме Arduino
- На самом продукте через нашу службу поддержки клиентов
Технические характеристики
| Рабочее напряжение | от 5 В до 12 В |
| Контроллер двигателя | L298P, Приводы 2 двигателя постоянного тока или 1 шаговый двигатель |
| Максимальный ток | 2 А на канал или 4 А макс. (с внешним источником питания) (с внешним источником питания) |
| Измерение тока | 1,65 В/А |
| Останов свободного хода и функция торможения |
Соответствие
Для этой плиты были предоставлены следующие Декларации о соответствии:
CE
UKCA
REACH
Для получения дополнительной информации о наших сертификатах, пожалуйста, посетите docs.arduino.cc/certifications Вы можете собрать свою собственную плату, используя следующие файлы:
ФАЙЛЫ EAGLE В .ZIP СХЕМЫ В .PDF
Питание
Плата Arduino Motor Shield должна питаться только от внешнего источника питания. Потому что L298 ИС, установленная на экране, имеет два отдельных разъема питания, один для логики и один для драйвера питания двигателя. Требуемый ток двигателя часто превышает максимальный номинальный ток USB.
Внешнее (не USB) питание может поступать либо от адаптера переменного тока в постоянный (настенный), либо от аккумулятора. Адаптер можно подключить, вставив штекер 2,1 мм с центральным положительным контактом в гнездо питания платы Arduino, на котором установлен моторный щит, или подключив провода, идущие к источнику питания, к винтовым клеммам Vin и GND, соблюдая при этом полярности.
Адаптер можно подключить, вставив штекер 2,1 мм с центральным положительным контактом в гнездо питания платы Arduino, на котором установлен моторный щит, или подключив провода, идущие к источнику питания, к винтовым клеммам Vin и GND, соблюдая при этом полярности.
Во избежание возможного повреждения платы Arduino, на которой установлен шилд, рекомендуется использовать внешний источник питания с напряжением от 7 до 12 В. Если вашему двигателю требуется более 9 В, мы рекомендуем вам разделить линии питания платы Arduino, на которой установлен экран. Это возможно, если перерезать перемычку «Vin Connect» , расположенную на задней стороне экрана. Абсолютный предел для Vin на винтовых клеммах составляет 18В.
Контакты питания следующие:
- Vin на винтовой клеммной колодке — это входное напряжение двигателя, подключенного к экрану. Внешний источник питания, подключенный к этому контакту, также обеспечивает питание платы Arduino, на которой он установлен.
 Сняв перемычку «Vin Connect» , вы сделаете это выделенной линией питания для двигателя.
Сняв перемычку «Vin Connect» , вы сделаете это выделенной линией питания для двигателя. - GND Заземление на клеммной колодке с винтовыми зажимами.
Экран может подавать 2 ампера на канал, всего максимум 4 ампера.
Вход и выход
Этот экран имеет два отдельных канала, называемых A и B, каждый из которых использует 4 контакта Arduino для управления двигателем или его обнаружения. Всего на этом шилде используется 8 контактов. Вы можете использовать каждый канал отдельно для управления двумя двигателями постоянного тока или объединить их для управления одним биполярным шаговым двигателем. Выводы экрана, разделенные по каналам, показаны в таблице ниже:
| Функция | контакта на кан. А | контакта на кан. Б |
| Направление | Д12 | Д13 |
| ШИМ | Д3 | Д11 |
| Тормоз | Д9 | Д8 |
| Измерение тока | А0 | А1 |
Если вам не нужны тормоз и измерение тока, а также вам нужно больше контактов для вашего приложения, вы можете отключить эту функцию, сняв соответствующие перемычки на задней стороне экрана.
Дополнительные разъемы на щите описаны следующим образом:
- Винтовые клеммы для подключения двигателей и их питания.
- 2 разъема TinkerKit для двух аналоговых входов (белого цвета), подключенных к A2 и A3.
- 2 разъема TinkerKit для двух аналоговых выходов (выделены оранжевым цветом посередине), подключенных к ШИМ-выходам на контактах D5 и D6.
- 2 разъема TinkerKit для интерфейса TWI (белого цвета с 4 контактами), один для входа, а другой для выхода.
Соединение двигателей
Коллекторный двигатель постоянного тока. Вы можете управлять двумя коллекторными двигателями постоянного тока, подключив два провода каждого из них к винтовым клеммам (+) и (-) для каждого канала A и B. Таким образом, вы можете контролировать его направление, устанавливая ВЫСОКИЙ или НИЗКИЙ DIR A и DIR B, вы можете управлять скоростью, изменяя значения рабочего цикла PWM A и PWM B. Штыри Тормоз А и Тормоз В, если они установлены в ВЫСОКОЕ, будут эффективно тормозить двигатели постоянного тока, а не позволять им замедляться из-за отключения питания. Вы можете измерить ток, проходящий через двигатель постоянного тока, считав выводы SNS0 и SNS1. На каждом канале будет напряжение, пропорциональное измеренному току, которое может быть считано как обычный аналоговый вход через функцию AnalogRead() на аналоговом входе A0 и A1. Для вашего удобства оно откалибровано на 3,3 В, когда канал выдает максимально возможный ток, то есть 2 А.
Вы можете измерить ток, проходящий через двигатель постоянного тока, считав выводы SNS0 и SNS1. На каждом канале будет напряжение, пропорциональное измеренному току, которое может быть считано как обычный аналоговый вход через функцию AnalogRead() на аналоговом входе A0 и A1. Для вашего удобства оно откалибровано на 3,3 В, когда канал выдает максимально возможный ток, то есть 2 А.
Физические характеристики
Максимальная длина и ширина платы Motor Shield составляют 2,7 и 2,1 дюйма соответственно. Четыре отверстия для винтов позволяют прикрепить плату к поверхности или корпусу. Обратите внимание, что расстояние между цифровыми контактами 7 и 8 составляет 160 мил (0,16 дюйма), а не кратно 100 мил расстояния между другими контактами. и многое другое, посетите Arduino Docs
Получите вдохновение
##заглавие## ##субтитры##
##текст##
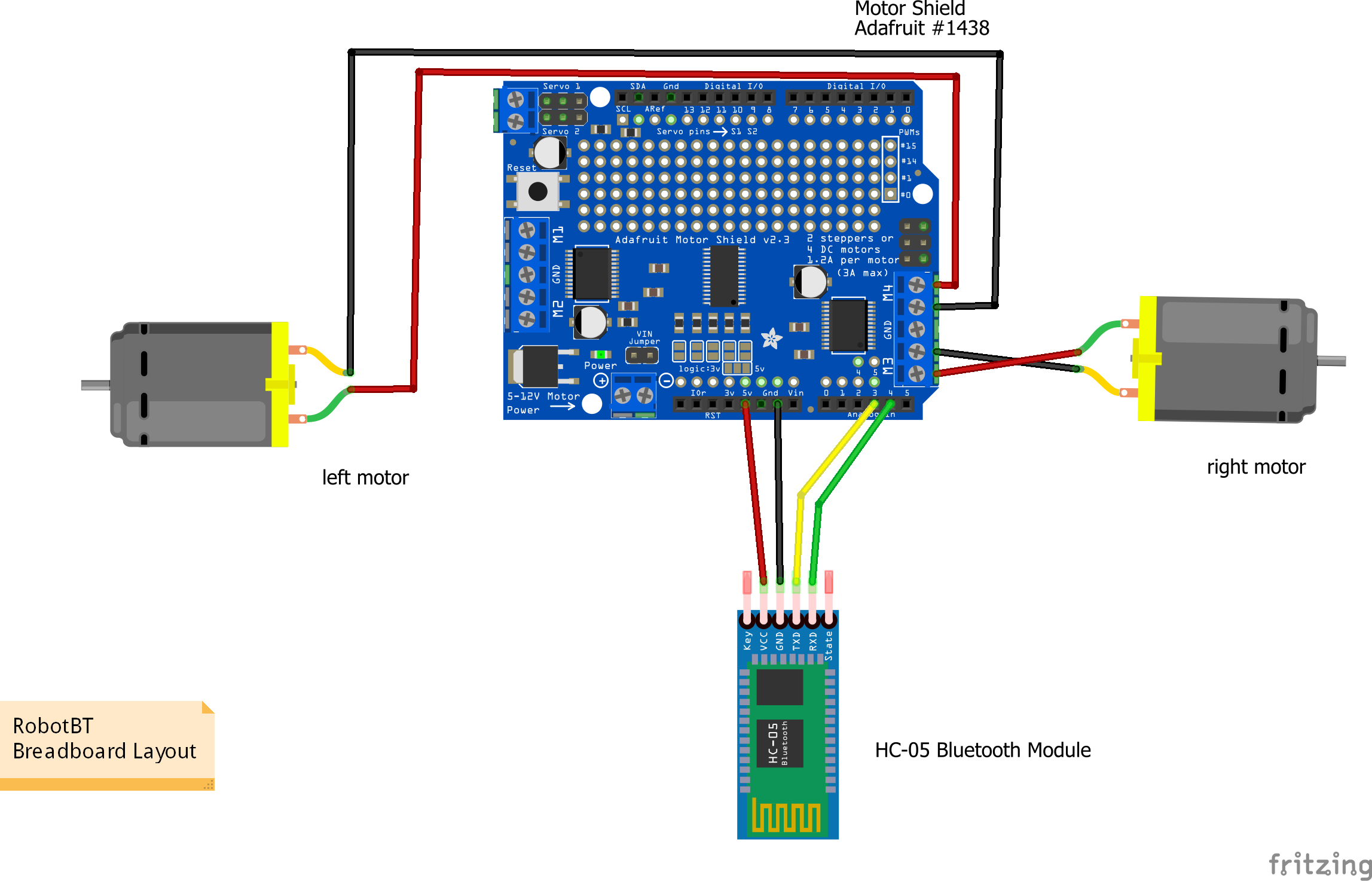
читать большеОбзор | Adafruit Motor Shield V2
Оригинальный комплект Adafruit Motorshield — один из наших самых любимых наборов, поэтому мы решили сделать что-то еще лучше. Мы обновили комплект защиты, чтобы обеспечить лучший и самый простой способ управления двигателями постоянного тока и шаговыми двигателями. Этот щит ускорит работу над вашим следующим проектом по робототехнике! Мы сохранили возможность управлять 4 двигателями постоянного тока или 2 шаговыми двигателями, но добавили множество улучшений:
Мы обновили комплект защиты, чтобы обеспечить лучший и самый простой способ управления двигателями постоянного тока и шаговыми двигателями. Этот щит ускорит работу над вашим следующим проектом по робототехнике! Мы сохранили возможность управлять 4 двигателями постоянного тока или 2 шаговыми двигателями, но добавили множество улучшений:
Вместо драйвера Дарлингтона L293D у нас теперь есть драйверы MOSFET TB6612 с допустимым током 1,2 А на канал (вы можете потреблять пиковый ток до 3 А в течение примерно 20 мс за раз). Он также имеет гораздо более низкое падение напряжения на двигателе, поэтому вы получаете больший крутящий момент от своих батарей, а также есть встроенные диоды обратного хода.
Вместо использования защелки и штырьков ШИМ Arduino, у нас есть встроенный чип с полностью специализированным драйвером ШИМ . Этот чип управляет всеми двигателями и скоростью через I2C. Только два контакта GPIO (SDA и SCL) плюс 5 В и GND. необходимы для управления несколькими двигателями, и, поскольку это I2C, вы также можете подключить любые другие устройства или экраны I2C к тем же контактам. Это также делает его совместимым с любым Arduino, таким как Uno, Leonardo, Due и Mega R3.
Это также делает его совместимым с любым Arduino, таким как Uno, Leonardo, Due и Mega R3.
Полностью стекируемая конструкция : 5 контактов выбора адреса означают до 32 стекируемых экранов: это 64 шаговых двигателя или 128 двигателей постоянного тока! Что же вы могли сделать с таким количеством степперов? Понятия не имею, но если вы что-нибудь придумаете, пришлите нам фото, потому что это был бы довольно славный проект.
Множество других небольших улучшений, таких как полевой транзистор с защитой от полярности на контактах питания и большая область для прототипирования. Экран собирается и тестируется здесь, в Adafruit, так что все, что вам нужно сделать, это припаять прямые или стековые разъемы и клеммные колодки.
Давайте еще раз проверим эти характеристики:
- 2 разъема для 5-вольтовых «хобби» сервоприводов подключен к специальному таймеру высокого разрешения Arduino — никакого джиттера!
- 4 H-моста: набор микросхем TB6612 обеспечивает 1,2 А на мост (3 А для коротких пиков 20 мс) с защитой от перегрева, внутренними диодами защиты от отдачи.
 Может запускать двигатели от 4,5 В до 13,5 В постоянного тока.
Может запускать двигатели от 4,5 В до 13,5 В постоянного тока. - До 4 двунаправленных двигателей постоянного тока с индивидуальным 8-битным выбором скорости (т. е. разрешение около 0,5 %)
- До 2 шаговых двигателей (униполярных или биполярных) с одиночной катушкой, двойной катушкой, чередованием или микрошагом.
- Двигатели автоматически отключаются при включении питания
- Большие клеммные колодки для легкого подключения проводов (18-26AWG) и питания
- Кнопка сброса Arduino выведена наверх
- 2-контактная клеммная колодка с защитой от полярности и перемычка для подключения внешнего питания для отдельных источников питания логики/двигателя
- Проверено на совместимость с Arduino UNO, Leonardo, ADK/Mega R3, Diecimila и Duemilanove. Работает с Due с логической перемычкой 3,3 В. Работает с Mega/ADK R2 и более ранними версиями с 2-проводными перемычками.
- Загрузите простую в использовании программную библиотеку Arduino, ознакомьтесь с примерами, и вы готовы к работе!
-
5 В или 3,3 В совместимые логические уровни — перемычка настраивается.

