Как работает H-мост для управления двигателями постоянного тока. Каковы преимущества использования H-моста. Какие типы H-мостов существуют. Как рассчитать и собрать простой H-мост на биполярных транзисторах.
Что такое H-мост и зачем он нужен
H-мост — это электронная схема, позволяющая изменять полярность напряжения, прикладываемого к нагрузке. Название «H-мост» схема получила из-за внешнего сходства с буквой «H».
Основные области применения H-моста:
- Управление направлением вращения двигателей постоянного тока
- Управление шаговыми двигателями
- Мостовые преобразователи напряжения
Главное преимущество H-моста — возможность изменять полярность напряжения на нагрузке без физического переподключения проводов. Это позволяет легко управлять двигателями с помощью микроконтроллеров.
Принцип работы H-моста
Классическая схема H-моста состоит из четырех управляемых ключей, расположенных в виде буквы «H»:
- Два верхних ключа подключены к положительной шине питания
- Два нижних ключа подключены к общему проводу (земле)
- Нагрузка подключена между средними точками левой и правой стоек «H»
Работа H-моста основана на попеременном включении пар ключей:

- При включении левого верхнего и правого нижнего ключей ток через нагрузку течет в одном направлении
- При включении правого верхнего и левого нижнего ключей ток меняет направление на противоположное
Таким образом, переключая пары ключей, можно менять полярность напряжения на нагрузке.
Типы H-мостов
В зависимости от типа используемых ключей различают следующие виды H-мостов:
- На механических переключателях (реле)
- На биполярных транзисторах
- На полевых транзисторах MOSFET
- На IGBT транзисторах
- Интегральные микросхемы (готовые драйверы H-моста)
Выбор типа H-моста зависит от требуемой мощности, скорости переключения и других параметров конкретного применения.
Способы управления H-мостом
Существует два основных способа управления ключами H-моста:
1. Общее управление противофазными ключами
В этом случае сигналы управления объединяются попарно для противоположных ключей:
- Один сигнал управляет левым верхним и правым нижним ключами
- Второй сигнал управляет правым верхним и левым нижним ключами
Преимущество: возможность режима торможения (замыкание обоих верхних или обоих нижних ключей).

Недостаток: вероятность возникновения сквозных токов через транзисторы.
2. Общее управление синфазными ключами
При этом способе объединяются сигналы управления для ключей одной стороны моста:
- Один сигнал управляет обоими левыми ключами
- Второй сигнал управляет обоими правыми ключами
Преимущество: легко избежать сквозных токов.
Недостаток: отсутствует режим торможения.
На практике чаще используется второй способ, так как сквозные токи более опасны для схемы.
Особенности работы H-моста с индуктивной нагрузкой
При управлении двигателями постоянного тока важно учитывать индуктивный характер нагрузки. Основная проблема — возникновение ЭДС самоиндукции при отключении тока через обмотку двигателя.
Для защиты ключей H-моста от перенапряжения используют два основных метода:
- Шунтирование каждого ключа обратным диодом
- Подключение конденсатора параллельно обмотке двигателя
Наиболее распространен первый способ с использованием защитных диодов.
Пример расчета H-моста на биполярных транзисторах
Рассмотрим расчет простого H-моста для управления двигателем постоянного тока со следующими параметрами:

- Напряжение питания: 12 В
- Максимальный ток двигателя: 1 А
- Управляющее напряжение: 12 В
Выбор транзисторов
Для силовых ключей подойдут транзисторы КТ815 (NPN) и КТ814 (PNP) со следующими характеристиками:
- Максимальный ток: 1,5 А
- Максимальное напряжение: 25 В
- Коэффициент усиления: 40
Расчет тока управления
Минимальный ток управления для силовых транзисторов:
Iупр = Iдв.max / h21э = 1 А / 40 = 25 мА
Расчет резисторов базы
Сопротивление резистора в базе силового транзистора:
Rб = (Uпит — 3 * Uбэ) / Iупр = (12 В — 3 * 0,5 В) / 25 мА = 420 Ом
Выбираем ближайшее стандартное значение 390 Ом.
Выбор управляющих транзисторов
Для управления силовыми ключами подойдут транзисторы КТ315А:
- Максимальный ток: 100 мА
- Максимальное напряжение: 25 В
- Минимальный коэффициент усиления: 30
Расчет резисторов управления
Ток управления для КТ315А:
Iупр.315 = 27 мА / 30 = 0,9 мА
Сопротивление резистора управления:
Rупр = (Uпит — 2 * Uбэ) / Iупр.315 = (12 В — 2 * 0,5 В) / 0,9 мА = 12 кОм
Выбираем ближайшее стандартное значение 10 кОм.

Преимущества и недостатки H-моста
Основные преимущества использования H-моста:
- Возможность изменения направления вращения двигателя без механических переключений
- Простота управления с помощью микроконтроллера
- Возможность реализации различных режимов работы двигателя (вращение, торможение, свободное вращение)
- Высокий КПД при использовании современных транзисторов
Недостатки H-моста:
- Сложность схемы по сравнению с простым ключом
- Необходимость защиты от сквозных токов
- Вероятность выхода из строя при неправильном управлении
Применение H-моста в современной электронике
H-мост широко используется в различных областях электроники и электротехники:
- Робототехника (управление двигателями роботов)
- Автомобильная электроника (стеклоподъемники, дворники, регулировка сидений)
- Бытовая техника (стиральные машины, холодильники)
- Промышленные приводы
- Электроинструменты
Развитие электроники привело к появлению специализированных микросхем — драйверов H-моста, которые значительно упрощают разработку устройств с управляемыми двигателями.
Как работает H-мост для двигателей постоянного тока
В этой статье мы подробно рассмотрим, как работает H-мост, который применяется для управления двигателями постоянного тока с низким напряжением питания. В качестве примера мы будем использовать популярную среди любителей робототехники интегральную микросхему L298. Но сначала от простого к сложному.
Портативный паяльник TS80P
TS80P- это обновленная версия паяльника TS80 Smart, работающий от USB…
Подробнее
H-мост на механических переключателях
Направление вращения вала у двигателя постоянного тока зависит от полярности питания. Чтобы изменить эту полярность, без переподключения источника питания, мы можем использовать 4 переключателя, как показано на следующем рисунке.
Этот тип соединения известен как «H Bridge» (H мост) — по форме схемы, которая похожа на букву «H». Эта схема подключения двигателя имеет очень интересные свойства, которые мы опишем в этой статье.
Если мы замкнем верхний левый и нижний правый переключатели, то двигатель будет подключен справа на минус, а слева на плюс. В результате этого он будет вращаться в одном направлении (путь прохождения тока указан красными линиями и стрелками).
В результате этого он будет вращаться в одном направлении (путь прохождения тока указан красными линиями и стрелками).
Паяльный фен YIHUA 8858
Обновленная версия, мощность: 600 Вт, расход воздуха: 240 л/час…
Подробнее
Если же мы замкнем верхний правый и нижний левый переключатели, то двигатель будет подключен справа на плюс, а слева на минус. В таком случае двигатель будет вращаться в противоположном направлении.
Эта схема управления имеет один существенный недостаток: если оба переключателя слева или оба переключателя справа замкнуть одновременно, то произойдет короткое замыкание источника питания, поэтому необходимо избегать такой ситуации.
Интересным состоянием следующей схемы является то, что используя только два верхних или нижних переключателя, мы отключаем двигатель от питания, в результате чего двигатель останавливается.
Конечно, H-мост, выполненный исключительно только на переключателях, не очень универсален. Мы привели этот пример только для того, чтобы простым и наглядным образом объяснить принцип работы H-моста.
Мы привели этот пример только для того, чтобы простым и наглядным образом объяснить принцип работы H-моста.
Но если мы заменим механические переключатели электронными ключами, то конструкция будет более интересна, поскольку в этом случае электронные ключи могут быть активированы логическими схемами, например, микроконтроллером.
H-мост на транзисторах
Для создания электронного H-моста на транзисторах можно использовать транзисторы как NPN, так и PNP типа. Могут быть использованы также и полевые транзисторы. Мы рассмотрим версию с NPN-транзисторами, потому что это решение использовано в микросхеме L298, которую мы увидим позже.
Транзистор — это электронный компонент, описание работы которого может быть сложным, но применительно к нашему H-мосту его работу легко проанализировать, поскольку он работает только в двух состояниях (отсечка и насыщение).
Транзистор мы можем представить просто как электронный переключатель, который закрыт, когда на базе (b) 0 В и открыт, когда на базе положительное напряжение.
Хорошо, мы заменили механические переключатели транзисторными ключами. Теперь нам необходим блок управления, который будет управлять нашими четырьмя транзисторами. Для этого мы будем использовать логические элементы типа «И».
Логика управления H-мостом
Логический элемент «И» состоит из интегрированных электронных компонентов и, не зная, что у него внутри, мы можем рассматривать его как своего рода «черный ящик», который имеет два входа и один выход. Таблица истинности показывает нам 4 возможные комбинации сигналов на входах и соответствующий им сигнал на выходе.
Мы видим, что только тогда, когда на обоих входах положительный сигнал (логическая единица), на выходе появляется логическая единица. Во всех остальных случаях на выходе будет логический ноль (0В).
В дополнение к данному логическому «И» элементу для нашего H-моста понадобиться другой тип логического элемента «И», у которого мы можем видеть небольшой круг на одном из его входов. Это все тот же логический элемент «И», но с одним инвертирующим (перевернутым) входом. В этом случае таблица истинности будет немного иная.
В этом случае таблица истинности будет немного иная.
Если мы объединим эти два типа «И» элемента, с двумя электронными переключателями, как показано на следующем рисунке, то состояние выхода «Х» может быть в трех вариантах: разомкнутое, положительное или отрицательное. Это будет зависеть от логического состояния двух входов. Этот тип выхода известен как «выход с тремя состояниями» (Three-State Output) который широко используется в цифровой электронике.
Теперь посмотрим, как будет работать наш пример. Когда вход «ENA» (разрешение) равен 0В, независимо от состояния входа «А», выход «Х» будет разомкнут, поскольку выходы обоих «И» элементов будут равны 0В, и, следовательно, два переключателя также будут разомкнуты.
Когда мы подаем напряжение на вход ENA, один из двух переключателей будет замкнут в зависимости от сигнала на входе «A»: высокий уровень на входе «A» подключит выход «X» к плюсу, низкий уровень на входе «A» подключит выход «X» к минусу питания.
Таки образом, мы построили одну из двух ветвей «H» моста. Теперь перейдем к рассмотрению работы полного моста.
Теперь перейдем к рассмотрению работы полного моста.
Эксплуатация полного H-моста
Добавив идентичную схему для второй ветви H-моста, мы получим полный мост, к которому уже можно подключить двигатель.
Обратите внимание, что вход разрешения (ENA) подключен к обеим ветвям моста, в то время как другие два входа (In1 и In2) независимы. Для наглядности схемы мы не указали защитные сопротивления на базах транзисторов.
Когда на ENA 0В, то на всех выходах логических элементов также 0В, и поэтому транзисторы закрыты, и двигатель не вращается. Если на вход ENA подать положительный сигнал, а на входах IN1 и IN2 будет 0В, то элементы «B» и «D» будут активированы. В этом состоянии оба входа двигателя будут заземлены, и двигатель также не будет вращаться.
Если мы подадим на IN1 положительный сигнал, при этом на IN2 будет 0В, то логический элемент «А» активируется вместе с элементом «D», а «B» и «C» будут отключены. В результате этого двигатель получит плюс питания от транзистора, подключенного к элементу «А» и минус от транзистора, подключенного к элементу «D». Двигатель начнет вращается в одном направлении.
Двигатель начнет вращается в одном направлении.
Если же мы сигналы на входах IN1 и IN2 инвертируем (перевернем), то в этом случае логические элементы «C» и «B» активируются, а «A» и «D» будут отключены. Результат этого — двигатель получит плюс питания от транзистора, подключенного к «C» и минус от транзистора, подключенного к «B». Двигатель начнет вращаться в противоположном направлении.
Если на входах IN1 и IN2 будет положительный сигнал, то активными элементами с соответствующими транзисторами будут «A» и «C», при этом оба вывода мотора будут подключены к плюсу питания.
H-мост на драйвере L298
Теперь давайте посмотрим на работу микросхемы L298. На рисунке приведена структурная схема драйвера L298, который имеет два одинаковых H-моста и позволяет управлять двумя двигателями постоянного тока (DC).
Как мы можем видеть, отрицательная часть мостов напрямую не связана с землей, но доступна на выводе 1 для моста слева и на выводе 15 для моста справа. Добавив очень малое сопротивление (шунт) между этими контактами и землей (RSA и RSB), мы можем измерить ток потребления каждого моста с помощью электронной схемы, которая может измеряет падение напряжения в точках «SENS A» и «SENS B».
Добавив очень малое сопротивление (шунт) между этими контактами и землей (RSA и RSB), мы можем измерить ток потребления каждого моста с помощью электронной схемы, которая может измеряет падение напряжения в точках «SENS A» и «SENS B».
Это может быть полезно для регулирования тока двигателя (с использованием ШИМ) или просто для активации системы защиты, в случае если двигатель застопориться (в этом случае его ток потребления значительно возрастает).
Защитный диод для индуктивной нагрузки
Каждый двигатель содержит проволочную обмотку (катушку) и, следовательно, в процессе управления двигателем на его выводах возникает всплеск ЭДС самоиндукции, которая может повредить транзисторы моста.
Чтобы решить эту проблему, вы можете использовать быстрые диоды типа Shottky или, если наши двигатели не являются особо мощными, просто обычные выпрямительные диоды, например 1N4007. Нужно иметь в виду, что выходы моста в процессе управления двигателем меняют свою полярность, поэтому необходимо использовать четыре диода вместо одного.
https://www.inventable.eu
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров…
Подробнее
Что такое H-мост и зачем он нужен. Пример расчёта H-моста на биполярных транзисторах — radiohlam.ru
Сегодня мы рассмотрим схему, позволяющую изменять полярность прикладываемого к нагрузке постоянного напряжения.
Необходимость изменять полярность напряжения часто возникает при управлении двигателями или в схемах мостовых преобразователей напряжения. Например, для двигателей постоянного тока это необходимо для изменения направления вращения, а шаговые двигатели или импульсные мостовые DC-DC преобразователи без решения этой задачи вообще не будут работать.
Итак, ниже вы можете видеть схему, которую за внешнюю схожесть с буквой H принято называть H-мостом.
К1, К2, К3, К4 — управляемые ключи
A, B, C, D — сигналы управления ключами
Идея этой схемы очень проста:
Если ключи K1 и К4 замкнуты, а ключи К2 и К3 разомкнуты, то к точке h2 оказывается приложено напряжение питания, а точка h3 замыкается на общий провод. Ток через нагрузку в этом случае течёт от точки h2 к точке h3.
Ток через нагрузку в этом случае течёт от точки h2 к точке h3.
Если сделать наоборот, — ключи К1 и К4 разомкнуть, а ключи К2 и К3 замкнуть, то полярность напряжения на нагрузке изменится на противоположную, — точка h2 окажется замкнута на общий провод, а точка h3 — на шину питания. Ток через нагрузку теперь будет течь от точки h3 к точке h2.
Кроме смены полярности, h-мост, в случае управления электродвигателем, добавляет нам и ещё один бонус — возможность закоротить концы обмоток, что ведёт к резкому торможению нашего движка. Такой эффект можно получить замкнув одновременно либо ключи К1 и К3, либо ключи К2 и К4. Назовём такой случай «режимом торможения». Справедливости ради стоит отметить, что этот бонус H-моста используется значительно реже, чем просто смена полярности (позже будет понятно почему).
В качестве ключей может выступать всё, что угодно: реле, полевые транзисторы, биполярные транзисторы. Промышленность делает H-мосты встроенными в микросхемы (например, микросхема LB1838, драйвер шагового двигателя, содержит два встроенных H-моста) и выпускает специальные драйверы для управления H-мостами (например драйвер IR2110 для управления полевиками). В этом случае, разработчики микросхем конечно стараются выжать максимум бонусов и устранить максимум нежелательных эффектов. Понятно, что такие промышленные решения справляются с задачей лучше всего, но радиохламеры народ бедный, а хорошие микросхемы стоят денег, поэтому мы, ясен пень, будем рассматривать чисто самопальные варианты мостов и схем управления ими.
В этом случае, разработчики микросхем конечно стараются выжать максимум бонусов и устранить максимум нежелательных эффектов. Понятно, что такие промышленные решения справляются с задачей лучше всего, но радиохламеры народ бедный, а хорошие микросхемы стоят денег, поэтому мы, ясен пень, будем рассматривать чисто самопальные варианты мостов и схем управления ими.
В самопальщине (то бишь в радиолюбительской практике) чаще всего используют H-мосты либо на мощных MOSFET-ах (для больших токов), либо на биполярных транзисторах (для небольших токов).
Довольно часто сигналы управления ключами попарно объединяют. Объединяют их таким образом, чтобы от одного внешнего сигнала управления формировалось сразу два сигнала управления в нашей схеме (то есть сразу на два ключа). Это позволяет сократить количество внешних сигналов управления с четырёх до двух штук (и сэкономить 2 ноги контроллера, если у нас контроллерное управление).
Объединяют сигналы чаще всего двумя способами: либо A объединяют с B, а C объединяют с D, либо A объединяют с D, а B объединяют с C. Чтобы обозначить и зафиксировать различия, — назовём способ, когда образуют пары AB и CD «общим управлением противофазными ключами» (эти ключи для изменении полярности прикладываемого к нагрузке напряжения должны работать в противофазе, т.е. если один открывается — другой должен закрываться), а способ, когда образуются пары AD и BC назовём «общим управлением синфазными ключами» (эти ключи для изменении полярности работают синфазно, т.е. либо оба должны открываться, либо оба закрываться).
Чтобы обозначить и зафиксировать различия, — назовём способ, когда образуют пары AB и CD «общим управлением противофазными ключами» (эти ключи для изменении полярности прикладываемого к нагрузке напряжения должны работать в противофазе, т.е. если один открывается — другой должен закрываться), а способ, когда образуются пары AD и BC назовём «общим управлением синфазными ключами» (эти ключи для изменении полярности работают синфазно, т.е. либо оба должны открываться, либо оба закрываться).
Чтобы было понятнее о чём идёт речь, — смотрим на рисунок справа. Договоримся далее высокий уровень напряжения считать единицей, а низкий — нулём. В левой части рисунка транзисторы управляются независимо друг от друга. Чтобы открыть верхний транзистор — нужно подать сигнал управления А=0, а чтобы его закрыть — нужно подать А=1. Для открытия и закрытия нижнего транзистора нужно подавать B=1 или В=0. Если с помощью дополнительного транзистора объединить сигналы A и В (смотрим правую часть рисунка), то управлять верхним и нижним транзистором можно одним общим сигналом АВ. Когда АВ=1 оба транзистора открываются, а когда АВ=0 — оба закрываются.
Когда АВ=1 оба транзистора открываются, а когда АВ=0 — оба закрываются.
На рисунке слева показан H-мост с общим управлением противофазными ключами, а на рисунке справа — с общим управлением синфазными ключами. У1 и У2 — это узлы, позволяющие из одного внешнего общего сигнала сформировать отдельный сигнал на каждый из работающих в паре ключей.
Теперь давайте подумаем что нам даёт каждый из этих двух способов управления.
При общем управлении противофазными ключами мы легко можем сделать так, чтобы оба верхних или оба нижних ключа оказались открыты (если схема такая, как у нас слева, то это произойдёт при AB=CD), то есть нам доступен режим торможения. Однако минус в том, что при таком способе управления мы практически наверняка получим сквозные токи через транзисторы, вопрос будет только в их величине. В проиышленных микрухах для борьбы с этой проблемой вводят специальную цепь задержки для одного из транзисторов.
При общем управлении синфазными ключами мы легко можем побороть сквозные токи (просто нужно сначала подавать сигнал на выключение той пары транзисторов, которая используется в настоящий момент, а уже потом сигнал на включение той пары, которую мы планируем использовать). Однако при таком управлении про режим торможения можно забыть (даже более того, если мы случайно одновременно подадим на оба внешних управляющих сигнала единицу — мы устроим в схеме КЗ).
Однако при таком управлении про режим торможения можно забыть (даже более того, если мы случайно одновременно подадим на оба внешних управляющих сигнала единицу — мы устроим в схеме КЗ).
Поскольку получить сквозные токи гораздо более кислый вариант (бороться с ними непросто), то обычно предпочитают забыть про режим торможения.
Кроме всего вышеперечисленного необходимо понимать, что при частых постоянных переключениях (в преобразователях или при управлении шаговиками), для нас будет принципиально важно не только избежать возникновения сквозных токов, но и добиться максимальной скорости переключения ключей, поскольку от этого зависит их нагрев. Если же мы используем h-мост просто для реверса двигателя постоянного тока, то тут скорость переключения не имеет такого критического значения, поскольку переключения не имеют систематического характера и ключи даже в случае нагрева скорее всего успеют остыть до следующего переключения.
Вот в общем-то и вся теория, если вспомню ещё что-нибудь важное — обязательно напишу.
Как вы понимаете, практических схем H-мостов, как и вариантов управления ими, можно придумать достаточно много, поскольку, как мы уже разобрались, важно учитывать и максимальный ток, и скорость переключения ключей, и варианты объединения управления ключами (а также вообще возможность такого объединения), поэтому для каждой практической схемы нужна отдельная статья (с указанием того, где эту конкретную схему целесообразно использовать). Здесь же я приведу для примера лишь простую схемку на биполярных транзисторах, годящуюся, скажем, для управления не очень мощными двигателями постоянного тока (зато покажу, как её рассчитывать).
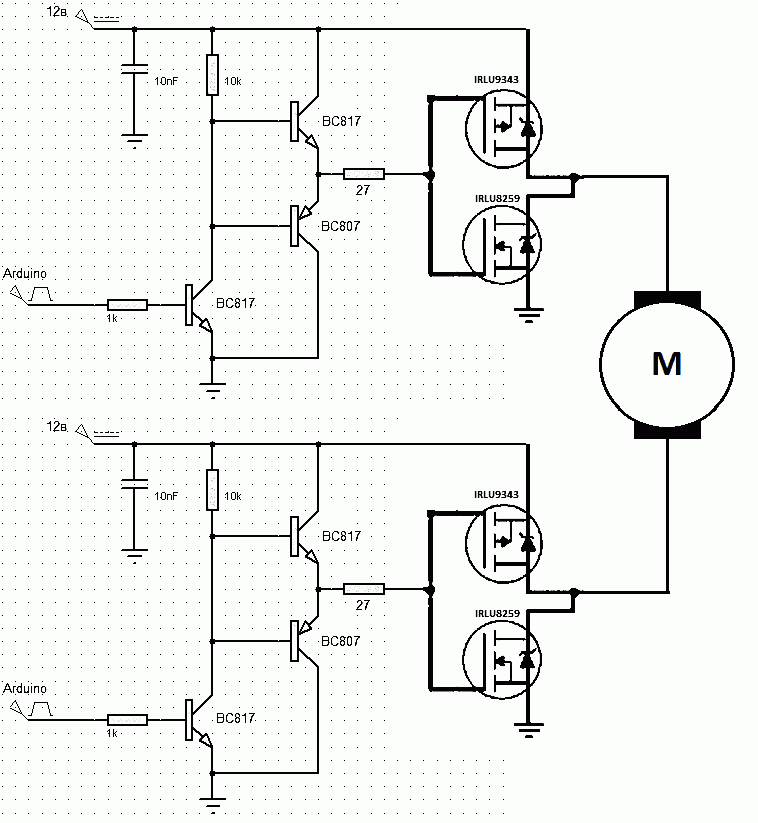
Итак, пример:
Сам H-мост выполнен на транзисторах T1, T2, T3, T4, а с помощью дополнительных транзисторов T5, T6 выполнено объединение управления синфазными ключами (сигнал A управляет транзисторами T1 и T4, сигнал B — транзисторами T2 и T3).
Работает эта схема следующим образом:
Когда уровень сигнала A становится высоким — начинает течь ток через резистор R2 и p-n переходы БЭ транзисторов T5 и T4, эти транзисторы открываются, в результате чего появляется ток через переход БЭ транзистора T1, резистор R1 и открытый транзистор T5, в результате чего открывается транзистор T1.
Когда уровень сигнала A становится низким — запираются p-n переходы БЭ транзисторов T5 и T4, эти транзисторы закрываются, прекращает течь ток через переход БЭ транзистора T1 и он тоже закрывается.
Как такую схему рассчитать? Очень просто. Пусть у нас напряжение питания 12В, максимальный ток двигателя 1А и сигнал управления также 12-ти вольтовый (состоянию «1» соответствует уровень напряжения около 12В, состоянию «0» — уровень около нуля вольт).
Сначала выбираем транзисторы T1, T2, T3, T4. Подойдут любые транзисторы, способные выдержать напряжение 12В и ток 1А, например, КТ815 (npn) и его комплиментарная пара — КТ814 (pnp). Эти транзисторы рассчитаны на ток до 1,5 Ампер, напряжение до 25 Вольт и имеют коэффициент усиления 40.
Рассчитываем минимальный ток управления транзисторов T1, T4: 1А/40=25 мА.
Рассчитываем резистор R1, полагая, что на p-n переходах БЭ транзисторов T1, T4 и на открытом транзисторе T5 падает по 0,5В: (12-3*0,5)/25=420 Ом. Это максимальное сопротивление, при котором мы получим нужный ток управления, поэтому мы выберем ближайшее меньшее значение из стандартного ряда: 390 Ом. При этом наш ток управления будет (12-3*0,5)/390=27 мА, а рассеиваемая на резисторе мощность: U2/R=283 мВт. То есть резистор надо ставить на 0,5 Вт (ну или поставить несколько 0,125 ваттных параллельно, но чтоб их общее сопротивление получилось 390 Ом)
При этом наш ток управления будет (12-3*0,5)/390=27 мА, а рассеиваемая на резисторе мощность: U2/R=283 мВт. То есть резистор надо ставить на 0,5 Вт (ну или поставить несколько 0,125 ваттных параллельно, но чтоб их общее сопротивление получилось 390 Ом)
Транзистор T5 должен выдерживать всё те же 12В и ток 27 мА. Подойдёт, например, КТ315А (25 Вольт, 100 мА, минимальный коэффициент усиления 30).
Рассчитываем его ток управления: 27 мА / 30 = 0,9 мА.
Рассчитываем резистор R2, полагая, что на переходах БЭ транзисторов T5 и T4 падает по 0,5 В: (12-2*0,5)/0,9 = 12 кОм. Опять выбираем ближайшее меньшее значение из стандартного ряда: 10 кОм. При этом ток управления T5 будет 1,1 мА и на нём будет рассеиваться 12,1 мВт тепла (то есть подойдёт обычный резистор на 0,125 Вт).
Вот и весь расчёт.
Далее хотелось бы поговорить вот о чём. В приведённых в статье теоретических схемах H-мостов у нас нарисованы только ключи, однако в рассматриваемом примере, кроме ключей присутствуют ещё одни элементы — диоды. Каждый наш ключ шунтирован диодом. Зачем это сделано и можно ли сделать как-то иначе?
Каждый наш ключ шунтирован диодом. Зачем это сделано и можно ли сделать как-то иначе?
В нашем примере мы управляем элетродвигателем. Нагрузкой, на которой мы переключаем полярность с помощью H-моста, является обмотка этого двигателя, то есть нагрузка у нас индуктивная. А у индуктивности есть одна интересная особенность — ток через неё не может измениться скачком.
Индуктивность работате как маховик — когда мы его раскручиваем — он запасает энергию (и мешает раскручиванию), а когда мы его отпускаем — он продолжает крутиться (расходуя
запасённую энергию). Так и катушка, — когда к ней прикладывают внешнее напряжение — через неё начинает течь ток, но он не резко вырастает, как через резистор, а постепенно, поскольку часть передаваемой источником питания энергии не расходуется на разгон электронов, а запасается катушкой в магнитном поле. Когда мы это внешнее напряжение убираем, — ток через катушку тоже не спадает мгновенно, а продолжает течь, уменьшаясь постепенно, только теперь уже на поддержание этого тока расходуется запасённая ранее в магнитном поле энергия.
Так вот. Посмотрим ещё раз наш самый первый рисунок (вот он, справа). Допустим у нас были замкнуты ключи К1 и К4. Когда мы эти ключи размыкаем, у нас через обмотку продолжает течь ток, то есть заряды продолжают перемещаться от точки h2 к точке h3 (за счёт энергии, накопленной обмоткой в магнитном поле). В результате этого перемещения зарядов, потенциал точки h2 падает, а потенциал точки h3 вырастает. Возникновение разности потенциалов между точками h2 и h3 при отключении катушки от внешнего источника питания известно также как ЭДС самоиндукции. За то время, пока мы открываем ключи K3 и К2, потенциал точки h2 может упасть значительно ниже нуля, также как и потенциал точки h3 может вырасти значительно выше потенциала шины питания. То есть наши ключи могут оказаться под угрозой пробоя высоким напряжением.
Как с этим бороться? Есть два пути.
Первый путь. Можно зашунтировать ключи диодами, как в нашем примере. Тогда при падении потенциала точки h2 ниже уровня общего провода откроется диод D3, через который с общего провода в точку h2 потечёт ток, и дальнейшее падение потенциала этой точки прекратиться. Аналогично, при росте потенциала точки h3 выше потенциала шины питания откроется диод D2, через который потечёт ток из точки h3 на шину питания, что опять же предотвратит дальнейший рост потенциала точки h3.
Аналогично, при росте потенциала точки h3 выше потенциала шины питания откроется диод D2, через который потечёт ток из точки h3 на шину питания, что опять же предотвратит дальнейший рост потенциала точки h3.
Второй путь основан на том факте, что при перекачивании зарядов из одной точки схемы в другую, изменение потенциалов между этими двумя точками будет зависеть от ёмкости схемы между этими точками. Чем больше ёмкость — тем больший заряд нужно переместить из одной точки в другую для получения одной и той же разности потенциалов (подробнее читайте в статье «Как работают конденсаторы»). Исходя из этого можно ограничить рост разности потенциалов между концами обмотки двигателя (а, соответственно, и рост разности потенциалов между точками h2, h3 и шинами питания и земли), зашунтировав эту обмотку конденсатором. Это, собственно, и есть второй путь.
На этом на сегодня всё, удачи!
MC33931 | Драйвер двигателя H-Bridge
1-5 из 7 документы
Сортировать поРелевантностиНовости/ДатаОт А до ЯОт Я до А
Рекомендуемые
PDFRev 3.
 04 января 2016 г.1.7 MBAN2388Английский
04 января 2016 г.1.7 MBAN2388Английский -
Техническая спецификация
Рекомендуемые
PDFRev 5.010 сентября 2018 г.618.5 KBMC33931Английский
-
Примечание по применению
PDFRev 1.019 ноября 2015 г.576.2 KBAN5212Английский
-
Примечание по применению
PDFRev 3.
 021 октября 2014 г.3.5 MBAN2409Английский
021 октября 2014 г.3.5 MBAN2409Английский PDF Ред. 1.0 29 октября 2008 г. 1.0 MBAN3670Английский
-
Руководство по выбору
PDFRev 13Fev 4, 2021197.6 KBMOTORDRIVERFLYRАнглийский
-
Руководство по выбору
PDFRev 1229 января 2020 г.
 1.2 MBINDCONTANLPRDFLАнглийский,
中文
1.2 MBINDCONTANLPRDFLАнглийский,
中文
Подождите, пока загружаются защищенные файлы.
MOTIX™ | ИС одиночного полумоста
Обзор
Одиночные полумостовые микросхемыMOTIX™ (NovalithIC™) представляют собой оптимизированные по стоимости решения для защищенных сильноточных приводов двигателей с ШИМ с очень низким потреблением места на плате..
ИС одиночного полумоста Infineon MOTIX™ (NovalithIC™) представляют собой полноценный полумост с низкоомной защитой в одном корпусе. Его можно комбинировать с дополнительными полумостовыми микросхемами MOTIX™ для создания Н-моста или трехфазного моста. Семейство одиночных полумостовых интегральных схем MOTIX™ имеет возможность переключения высокочастотной ШИМ, обеспечивая при этом защиту от перегрузки по току, перенапряжения и перегрева. Семейство одиночных полумостовых интегральных схем MOTIX™ предлагает оптимизированные по стоимости решения для защищенных сильноточных приводов двигателей с ШИМ с очень низким потреблением места на плате — масштабирование в соответствии с вашими потребностями.
Многочисленные функции защиты и диагностики одиночных полумостовых интегральных схем MOTIX™ делают их идеальными для приложений, связанных с безопасностью, таких как электронный стояночный тормоз, активное управление подвеской, топливные насосы. Благодаря своей долговечности и простоте использования полумостовые интегральные схемы MOTIX™ также идеально подходят для электронных преднатяжителей ремней безопасности, T-Case, модуля управления HVAC и многих других устройств.
Задайте вопрос сообществу Infineon MOTIX™ Bridge
Сообщество разработчиков Infineon доступно круглосуточно и без выходных, чтобы вы могли общаться и общаться с инженерами по всему миру. Получите помощь от инженеров службы поддержки Infineon и членов-экспертов, чтобы решить свои проблемы проектирования в любое время, в любом месте, по любой теме и на предпочитаемом вами языке.
Задать вопрос сообществу
Продукты
Основные моменты
MOTIX™ BTN99x0LV соответствует стандарту ISO26262! Как получить указания по технике безопасности?
Что такое мой ICP?
Платформа для совместной работы myInfineon, также известная как myICP, представляет собой портал, через который вы можете получить доступ ко всей документации, относящейся к продуктам Infineon. В то время как большая часть документации доступна через веб-сайт Infineon, доступ к конфиденциальным документам, требующим от клиентов соглашений о неразглашении (NDA), можно получить на myICP.
Как получить доступ?
Доступ к myICP предоставляется в три основных этапа:
Шаг 1: Зарегистрируйтесь на платформе myInfineon.
- Зарегистрируйтесь в MyInfineon здесь
- Введите необходимую информацию в регистрационную форму
- Активируйте свою учетную запись, нажав на ссылку в электронном письме, отправленном вам
Шаг 2. Станьте повышенным пользователем в myInfineon, связавшись с вашим коллегой из Infineon или щелкнув рекламный баннер на вкладке «Мой профиль» в MyInfineon.
Станьте повышенным пользователем в myInfineon, связавшись с вашим коллегой из Infineon или щелкнув рекламный баннер на вкладке «Мой профиль» в MyInfineon.
Шаг 3: Получите доступ к необходимой документации.
Что такое статус готовности к ISO 26262?
Маркировка PRO-SIL™ ISO 26262-ready обозначает продукты QM, которые могут — при дополнительной поддержке анализа и оценки со стороны Infineon — быть интегрированы в совместимое с ISO 26262 приложение клиента, связанное с безопасностью, даже если они не были спроектированы или разработаны в соответствии со стандартами ISO 26262.
Требования, указанные в пунктах 8–13 и 8–14 ISO 26262:2018, могут применяться заказчиками для обеспечения того, чтобы функциональное поведение устройства соответствовало установленным требованиям безопасности для уровня приложения. Как правило, детали, соответствующие стандарту PRO-SIL™ ISO 26262, поддерживают оценку оборудования класса II по стандарту ISO 26262:2018, пункт 8-13.
Infineon предоставляет примечания по безопасности (SAN) для устройств PRO-SIL™, совместимых с ISO 26262, которые призваны помочь заказчику в процессе оценки. Этот важный документ также содержит ценную информацию для поддержки интеграции компонента в систему заказчика, связанную с безопасностью. Хотя ответственность за оценку того, подходят ли сведения о продукте и достаточны ли они для поддержки интеграции в системе, соответствующей стандарту ISO 26262, лежит на покупателе, информация, предоставленная в SAN, значительно сократит требуемые усилия.
Узнайте больше о готовности к ISO 26262 в документе Automotive Safety Whitepaper: наличие необходимого ассортимента продукции.
Чтобы узнать больше о надежной электронике на основе функциональной безопасности от Infineon, нажмите здесь.
Разница между готовностью к ISO 26262 и совместимостью с ISO 26262?
Чтобы узнать больше о надежной электронике на основе функциональной безопасности от Infineon, нажмите здесь.
Благо ISO 26262 готов?
Infineon предоставляет рекомендации по безопасности (SAN) для устройств PRO-SIL™, отвечающих стандарту ISO 26262, которые призваны помочь заказчику в процессе оценки. Этот важный документ также содержит ценную информацию для поддержки интеграции компонента в систему заказчика, связанную с безопасностью. Хотя ответственность за оценку того, подходят ли сведения о продукте и достаточны ли они для поддержки интеграции в системе, соответствующей стандарту ISO 26262, лежит на покупателе, информация, предоставленная в SAN, значительно сократит требуемые усилия.
Чтобы узнать больше о надежной электронике на основе функциональной безопасности от Infineon, нажмите здесь.
Загрузить информационный документ по автомобильной безопасности: наличие необходимого ассортимента продукции.
Что такое одиночные полумостовые микросхемы MOTIX™ (NovalithIC™)?
NovalithIC™ — это семейство интеллектуальных интегрированных ИС драйверов двигателей от Infineon.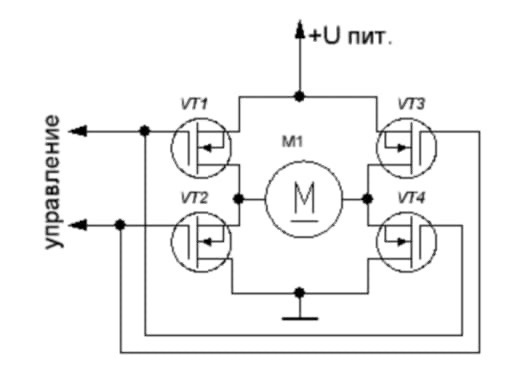 Они поддерживают высокие токи и предназначены для использования в автомобильной и промышленной технике. NovalithIC™ — это полностью защищенный низкоомный полумост в одном корпусе. Его можно комбинировать с дополнительным NovalithIC™ для создания Н-моста или трехфазного моста. Семейство NovalithIC™ имеет возможность переключать высокочастотный ШИМ, обеспечивая при этом защиту от перегрузки по току, перенапряжения и перегрева. Семейство NovalithIC™ предлагает оптимизированные по стоимости решения для защищенных сильноточных приводов с ШИМ-двигателями с очень низким потреблением места на плате, которые масштабируются в соответствии с вашими потребностями.
Они поддерживают высокие токи и предназначены для использования в автомобильной и промышленной технике. NovalithIC™ — это полностью защищенный низкоомный полумост в одном корпусе. Его можно комбинировать с дополнительным NovalithIC™ для создания Н-моста или трехфазного моста. Семейство NovalithIC™ имеет возможность переключать высокочастотный ШИМ, обеспечивая при этом защиту от перегрузки по току, перенапряжения и перегрева. Семейство NovalithIC™ предлагает оптимизированные по стоимости решения для защищенных сильноточных приводов с ШИМ-двигателями с очень низким потреблением места на плате, которые масштабируются в соответствии с вашими потребностями.
Где использовать одиночные полумостовые микросхемы MOTIX™ (NovalithIC™)?
Множество функций защиты и диагностики устройств NovalithIC™ делают их идеальными для приложений, связанных с безопасностью, таких как электронный стояночный тормоз, активная система управления подвеской , топливные насосы .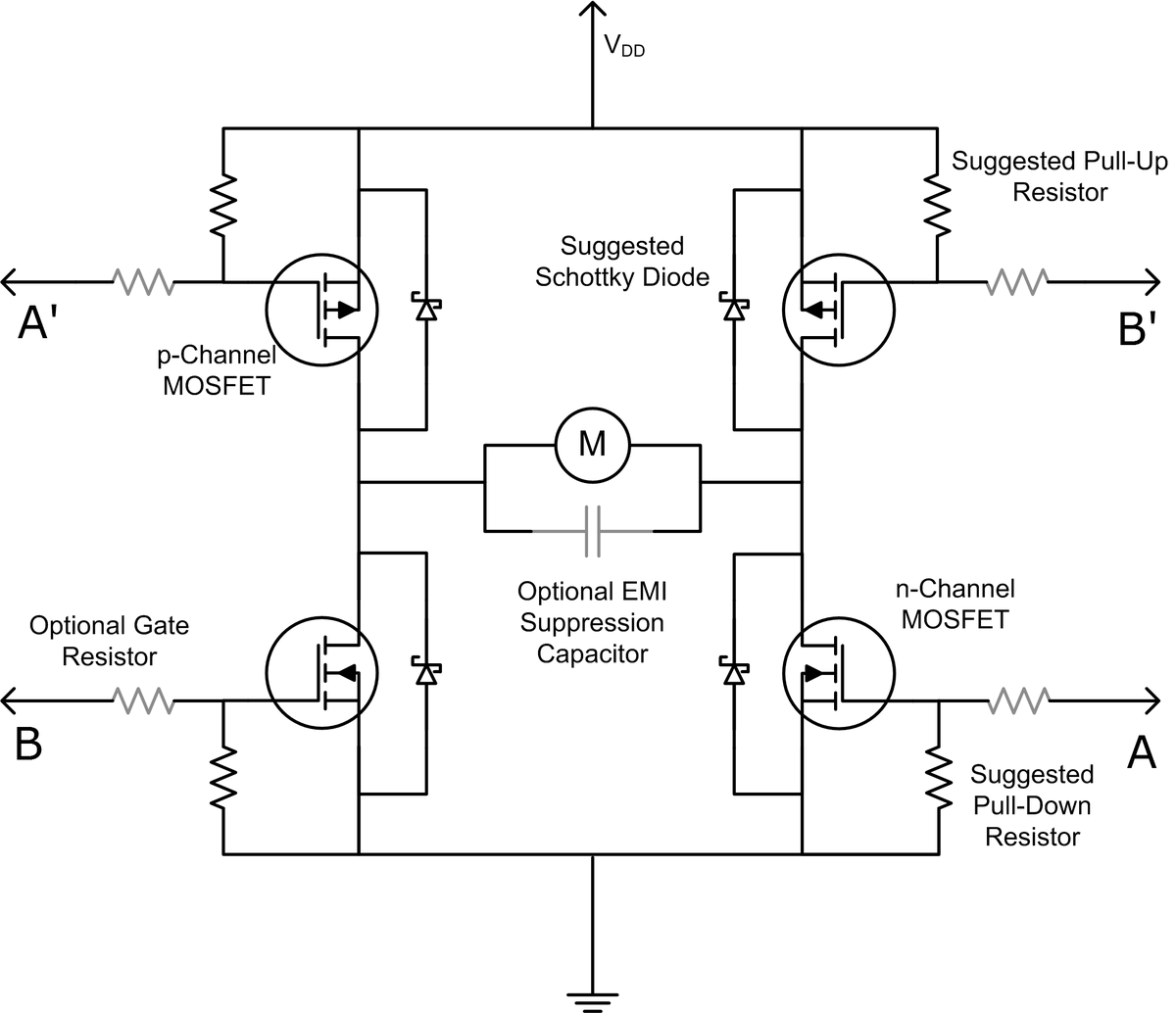 Благодаря своей долговечности и простоте использования устройства NovalithIC™ также идеально подходят для электронных преднатяжителей ремней безопасности , T-Case , модуля управления HVAC и многих других.
Благодаря своей долговечности и простоте использования устройства NovalithIC™ также идеально подходят для электронных преднатяжителей ремней безопасности , T-Case , модуля управления HVAC и многих других.
Зачем использовать одиночные полумостовые микросхемы MOTIX™ (NovalithIC™)?
| Экономия места (полная интеграция в одном малогабаритном устройстве: минимум внешних компонентов).
|
|
| Высококачественное и чрезвычайно надежное устройство – благодаря многолетнему опыту и миллионам проданных экземпляров.
|
|
| Благодаря функциям защиты и диагностики, а также разделению на полумост, NovalithIC™ обеспечивает высоконадежные решения.
|
|
| NovalithIC™ прост в использовании — он позволяет напрямую вводить данные из микроконтроллера и сводит к минимуму затраты на компоновку и изготовление.
|
|
| NovalithIC™ обеспечивает гибкое управление двигателем с помощью ШИМ, активного свободного хода и регулируемой скорости нарастания. Благодаря семейному подходу он полностью масштабируем. |

Как использовать микросхемы одиночного полумоста MOTIX™ (NovalithIC™)?
Infineon предлагает широкий выбор вспомогательных материалов:
- Оценочные платы
- Шилды для Arduino
- Инструмент рассеивания мощности
- Замечания по применению
- Руководство пользователя
- Спецификации
Больше вопросов? Посетите форум интегральных схем MOTIX™ для полумоста (NovalithIC™) и обратитесь за поддержкой к нашему сообществу.
Щелкните здесь, чтобы посетить автомобильный форум NovalitIC™.
Документы
Поддержка дизайна
Видео
Делиться Делиться Делиться Делиться Делиться Делиться ДелитьсяПартнеры
Обучение
Решения Infineon для автомобильных интеллектуальных замков с электроприводом
- Умные замки с электроприводом повышают удобство работы пользователей, обеспечивая комфорт и удобство входа и выхода из автомобиля.
