Как определить обороты электродвигателя. Какие существуют способы измерения скорости вращения шпинделя. Почему важно знать число оборотов мотора. От чего зависит частота вращения ротора.
Основные способы определения оборотов электродвигателя
Существует несколько эффективных методов для измерения скорости вращения электродвигателя:
- С помощью тахометра
- По паспортным данным двигателя
- Расчетным путем
- По размеру обмотки статора
- С использованием стробоскопа
Рассмотрим каждый из этих способов подробнее.
Измерение тахометром
Тахометр — это специальный прибор для измерения частоты вращения. Существуют контактные и бесконтактные тахометры:
- Контактный тахометр прижимается наконечником к валу двигателя
- Бесконтактный работает на основе лазерного луча или фотоэлемента
Тахометр позволяет быстро и точно измерить обороты работающего двигателя.
Определение по паспортным данным
На заводской табличке электродвигателя обычно указывается номинальная частота вращения. Для асинхронных двигателей это будет синхронная скорость за вычетом скольжения.

Расчет оборотов электродвигателя
Частоту вращения асинхронного двигателя можно рассчитать по формуле:
n = 60 * f / p
Где:
- n — частота вращения (об/мин)
- f — частота питающего тока (Гц)
- p — число пар полюсов обмотки статора
Для сети 50 Гц получаем следующие синхронные скорости:
- 1 пара полюсов — 3000 об/мин
- 2 пары — 1500 об/мин
- 3 пары — 1000 об/мин
- 4 пары — 750 об/мин
Определение оборотов по размеру обмотки статора
Этот способ позволяет примерно оценить частоту вращения, не запуская двигатель:
- Если обмотка занимает 1/4 паза статора — около 750 об/мин
- 1/3 паза — примерно 1000 об/мин
- 1/2 паза — около 1500 об/мин
- Весь паз — примерно 3000 об/мин
Точность этого метода невысока, но он позволяет быстро сориентироваться.
Измерение скорости вращения стробоскопом
Принцип работы стробоскопа основан на стробоскопическом эффекте. При совпадении частоты вспышек с оборотами двигателя вал кажется неподвижным.
Порядок измерения:
- Наносим метку на вращающийся вал
- Направляем стробоскоп на вал
- Регулируем частоту вспышек
- При «остановке» изображения считываем показания
Этот способ позволяет измерять высокие обороты бесконтактным методом.

Зачем нужно знать число оборотов электродвигателя
Определение частоты вращения электродвигателя важно по нескольким причинам:
- Для правильного подбора двигателя под конкретную задачу
- При диагностике неисправностей и оценке состояния мотора
- Для настройки систем управления и защиты
- При проектировании приводов и механизмов
Зная реальные обороты, можно оценить эффективность работы электропривода.
От чего зависит скорость вращения электродвигателя
На частоту вращения ротора влияют следующие факторы:
- Число пар полюсов обмотки статора
- Частота питающего напряжения
- Величина нагрузки на валу
- Напряжение питания
- Температура обмоток
Понимание этих зависимостей позволяет правильно эксплуатировать и обслуживать электродвигатели.
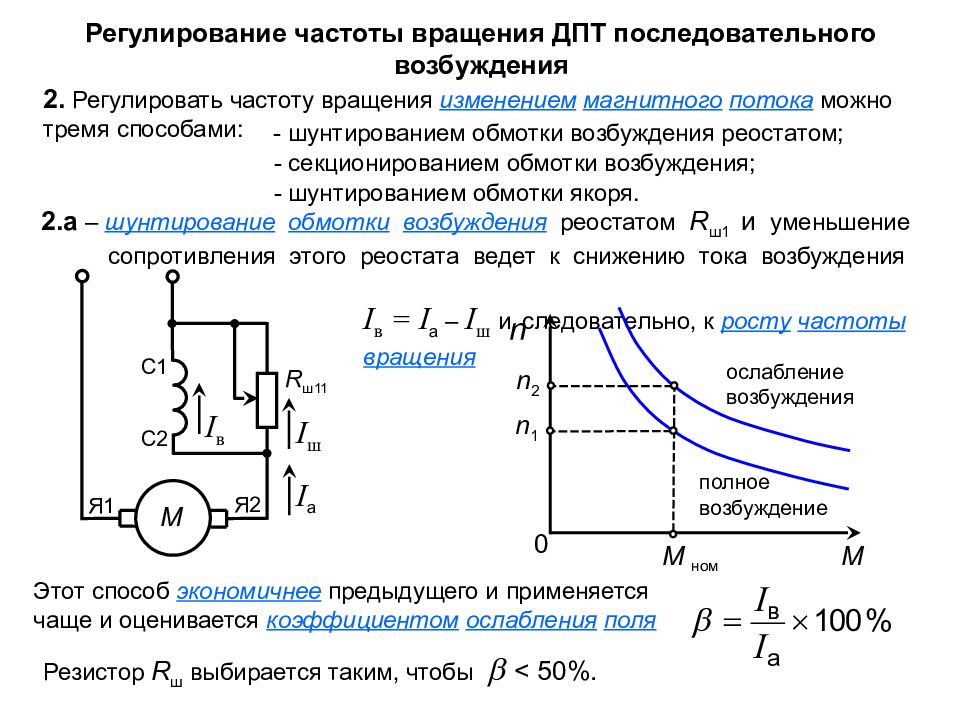
Способы регулирования скорости вращения
Существует несколько основных методов изменения частоты вращения электродвигателей:
- Частотное регулирование
- Изменение числа пар полюсов
- Реостатное регулирование
- Импульсное регулирование
Выбор конкретного способа зависит от типа двигателя и требований к приводу.

Особенности определения оборотов для разных типов двигателей
Методика измерения скорости вращения зависит от конструкции электродвигателя:
Асинхронные двигатели
Для них характерно наличие скольжения. Реальная скорость всегда ниже синхронной на 2-5%.
Синхронные двигатели
Частота вращения жестко связана с частотой сети. Скольжение отсутствует.
Двигатели постоянного тока
Обороты зависят от напряжения питания и нагрузки. Могут регулироваться в широком диапазоне.
Влияние нагрузки на обороты электродвигателя
При увеличении нагрузки на валу частота вращения большинства двигателей снижается:
- У асинхронных двигателей увеличивается скольжение
- У двигателей постоянного тока падает напряжение якоря
- Синхронные двигатели сохраняют постоянные обороты
Степень снижения оборотов зависит от жесткости механической характеристики.
Измерение скорости вращения в динамических режимах
Для исследования переходных процессов применяются специальные методы:
- Скоростная фотосъемка
- Датчики угловых перемещений
- Высокочастотные тахогенераторы
- Цифровые энкодеры
Это позволяет анализировать динамику разгона и торможения электроприводов.
FAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как увеличить или уменьшить обороты электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Какие исполнения двигателей бывают?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.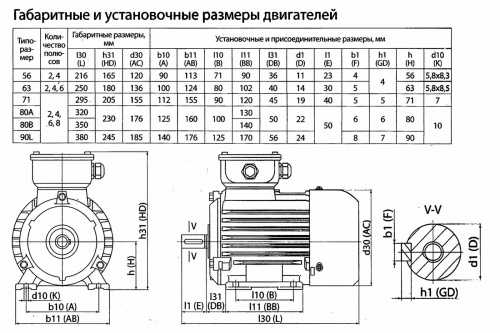
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам.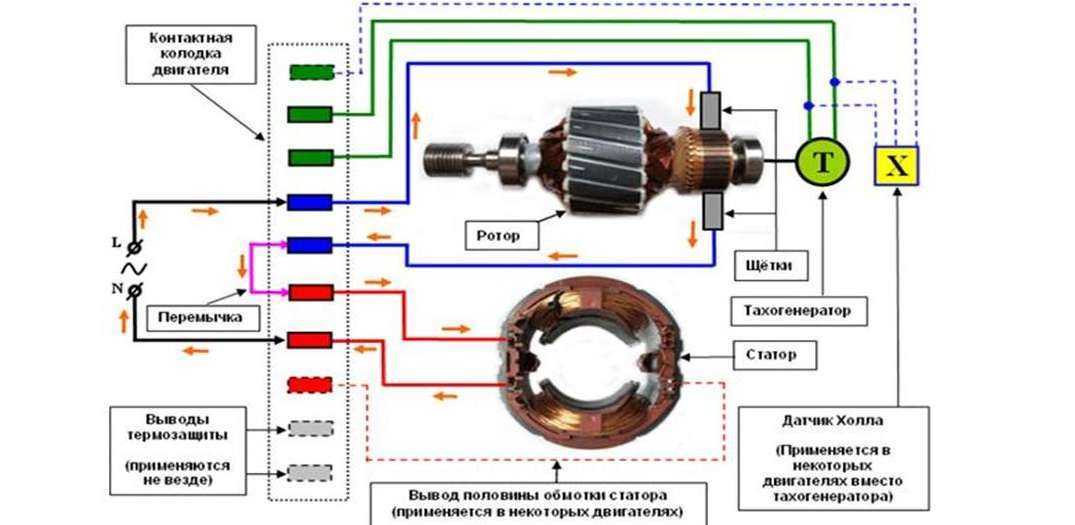 При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
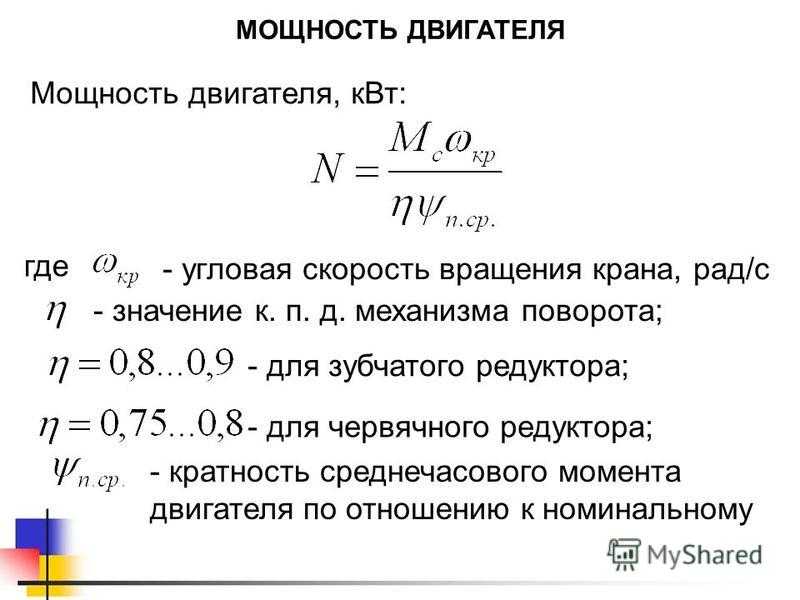
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).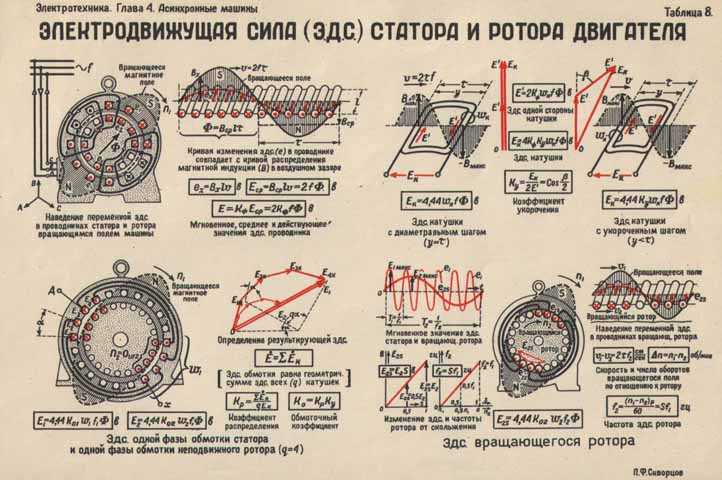
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.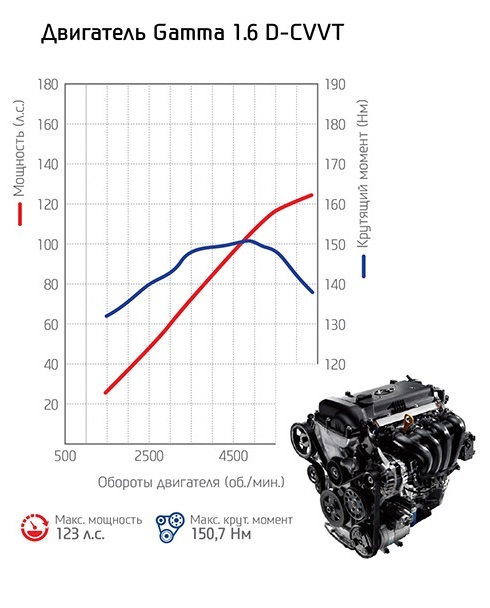
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
Как узнать число оборотов электродвигателя
Как самостоятельно узнать число оборотов электродвигателя
Зачастую, покупая с рук электродвигатель, автовладелец (и не только) в последующем обнаруживает, что к нему нет никакой документации. В таком случае, как правило, приходится самостоятельно определять обороты электродвигателя, а многие, как свидетельствует практика, не знают, как это сделать. Данная статья расскажет, как определить обороты электродвигателя самостоятельно и, что следует при этом знать.
В таком случае, как правило, приходится самостоятельно определять обороты электродвигателя, а многие, как свидетельствует практика, не знают, как это сделать. Данная статья расскажет, как определить обороты электродвигателя самостоятельно и, что следует при этом знать.
Пошаговая инструкция определения оборотов
1. На сегодняшний день асинхронные электродвигатели подразделяются на три группы, каждая из которых говорит об индивидуальном обращении ротора в минуту. Первая группа – электродвигатели, делающие 1000 оборотов в минуту. Стоит сразу заметить, что данная цифра немного преувеличена, так как двигатель асинхронный.
Он делает, как правило, около 950-970 оборотов, но для удобства специалисты такие цифры решили округлить. Ко второй группе относятся двигатели, количество обращений ротора которых составляет 1500 за минуту. Эта цифра так же округленная, на самом деле электродвигатель делает 1430—1470 оборотом в минуту.
Третья группа асинхронных электродвигателей – это группа, к которой относится деталь, ротор которой оборачивается вокруг себя три тысячи раз за одну минуту. Реальная цифра оборотов – 2900-2970.
Реальная цифра оборотов – 2900-2970.
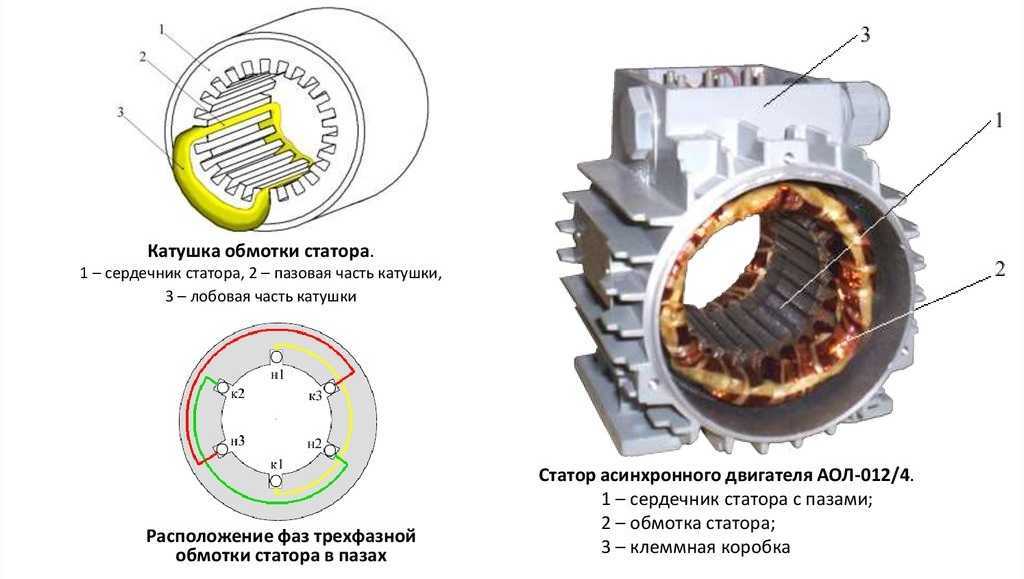
2. Для того, чтобы определить обороты электродвигателя, вам сначала нужно выявить, к какой же именно из указанных выше групп он относится. Для этого откройте одну из его крышек и найдите под низом катушку обмотки. Помните, такая катушка может состоять, как из одной детали, так и из нескольких, в частности трех-четырех. Кроме всего прочего знайте, что подобных катушек в электродвигателе может быть несколько. Вам достаточно одной, до которой, чтобы рассмотреть, нужно меньше всего прикладывать усилий.
3. Внимание! Катушки между собой связаны определенными деталями, которые иногда мешают рассмотреть нужную информацию. Ни при каких обстоятельствах нельзя отсоединять ничего друг от друга. Внимательно приглядитесь к выбранной вами детали и попробуйте приблизительно определить размер катушки относительно кольца статора.
4. Данное расстояние, чтобы узнать обороты электродвигателя, вовсе не нужно определять до точности. Приблизительные расчеты подойдут вам.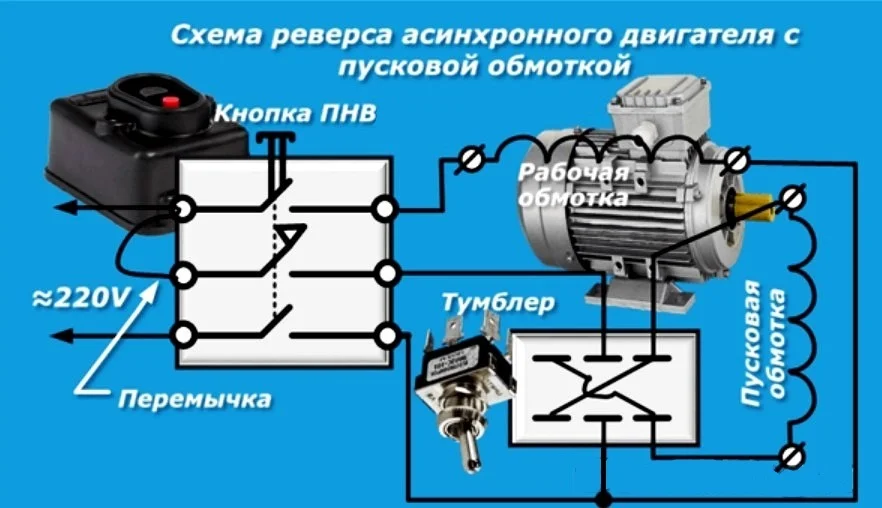
Если размер катушки, примерно, закрывает собой половину кольца статора, то скорость вращения ротора – три тысячи оборотов в минуту.
Если размер катушки покрывает, приблизительно, треть самого кольца, электродвигатель будет относиться ко второй группе и, следовательно, число оборотов, которые он сможет совершать, не будет превышать отметки 1500 за минуту.
Когда размер катушки равен одной четвертой по отношению к кольцу – число оборотов электродвигателя будет 1000 оборотов за одну минуту и, соответственно, двигатель будет относиться к третьей группе.
Не забывайте, что указанные цифры – это всего лишь приблизительная картина вращения, в реальности они могут отличаться и это зависит от множества факторов.
Эти статьи вам тоже пригодятся:
♦ Супер-лупа со светодиодами
♦ Как получить электричество с помощью радиоволн
♦ Самый простейший МР3 усилитель
♦ Антенна для телевизора из пивных банок
Теперь посмотрите это полезное видео:
В чем разница между скоростью и крутящим моментом?
Роторный двигатель предназначен для обеспечения желаемой выходной скорости вращения при преодолении различных вращательных нагрузок, противодействующих этому выходному вращению (крутящий момент). Скорость и крутящий момент напрямую связаны и являются двумя основными факторами производительности при правильном выборе двигателя для конкретного применения или использования. Чтобы узнать, как выбрать двигатель, подходящий для вашего применения, в первую очередь необходимо понять взаимосвязь между скоростью, крутящим моментом и выходной мощностью двигателя.
Скорость по отношению к крутящему моменту
Выходная мощность двигателя устанавливает границы скорости и крутящего момента двигателя на основе уравнения:
Мощность (P) = скорость (n) x крутящий момент (M)
-
- Мощность: Механическая выходная мощность двигателя определяется как произведение выходной скорости на выходной крутящий момент и обычно измеряется в ваттах (Вт) или лошадиных силах (л.
 с.).
с.). - Скорость: Скорость двигателя определяется как скорость вращения двигателя. Скорость электродвигателя измеряется в оборотах в минуту или об/мин.
- Крутящий момент: Выходной крутящий момент двигателя — это сила вращения, которую развивает двигатель. Крутящий момент небольшого электродвигателя обычно измеряется либо в дюйм-фунтах (дюйм-фунтах), ньютон-метрах (Н-м), либо в других единицах измерения, преобразованных напрямую.
- Мощность: Механическая выходная мощность двигателя определяется как произведение выходной скорости на выходной крутящий момент и обычно измеряется в ваттах (Вт) или лошадиных силах (л.
Поскольку номинальная выходная мощность двигателя является фиксированной величиной, скорость и крутящий момент обратно пропорциональны. По мере увеличения выходной скорости доступный выходной крутящий момент пропорционально уменьшается. По мере увеличения выходного крутящего момента выходная скорость пропорционально уменьшается. Это соотношение мощности, скорости и крутящего момента обычно иллюстрируется кривой производительности двигателя, которая часто включает потребление тока двигателя (в амперах) и КПД двигателя (в %).
Соображения по скорости и крутящему моменту при выборе электродвигателя
Ключом к выбору правильного двигателя для конкретной функции является, прежде всего, понимание требований приложения. Поскольку большинство приложений двигателей являются динамическими, а это означает, что требования к крутящему моменту и скорости изменяются в рамках приложения, очень важно определить различные рабочие точки в приложении. Знание или расчет требований к скорости и крутящему моменту в каждой рабочей точке приложения позволит определить общие требования к скорости и крутящему моменту для соответствующего двигателя. Выбор двигателя можно проверить, нанеся различные рабочие точки на кривую характеристик выбранного двигателя, чтобы убедиться, что каждая точка зависимости скорости от крутящего момента попадает в соответствующую зону кривой (непрерывные или прерывистые зоны).
Во многих случаях требования к применению требуют выбора стандартного двигателя значительно большего размера, чтобы обеспечить охват всех рабочих точек.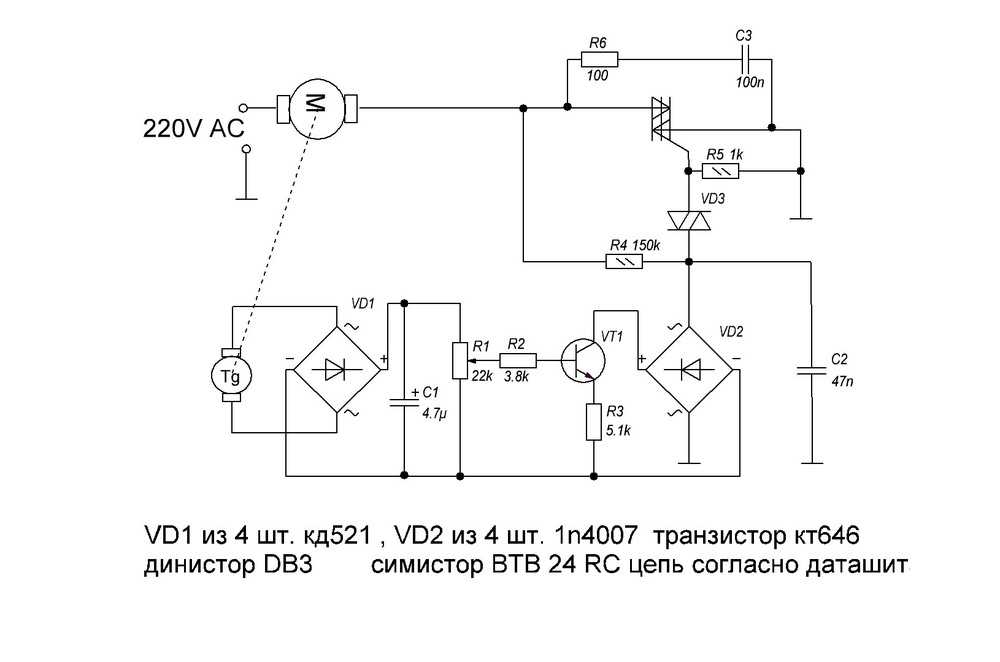 Применение двигателей, которые слишком велики для приложения, приводит к ненужным затратам, а также к увеличению и утяжелению конструкции всего продукта. К счастью, поставщики нестандартных двигателей могут разрабатывать двигатели с оптимизированными характеристиками для точного соответствия требованиям применения. Это делается путем изменения электромагнитных характеристик двигателя путем изменения либо размера провода, либо количества витков провода в обмотке, либо того и другого. Большее количество витков проволоки меньшего размера обеспечивает больший крутящий момент и меньшую скорость, тогда как меньшее количество витков проволоки большего диаметра обеспечивает более высокую скорость, но меньший крутящий момент. В некоторых приложениях добавление редуктора к выходной мощности двигателя обеспечивает идеальное соотношение скорости и крутящего момента, сводя к минимуму стоимость и размеры всего решения.
Применение двигателей, которые слишком велики для приложения, приводит к ненужным затратам, а также к увеличению и утяжелению конструкции всего продукта. К счастью, поставщики нестандартных двигателей могут разрабатывать двигатели с оптимизированными характеристиками для точного соответствия требованиям применения. Это делается путем изменения электромагнитных характеристик двигателя путем изменения либо размера провода, либо количества витков провода в обмотке, либо того и другого. Большее количество витков проволоки меньшего размера обеспечивает больший крутящий момент и меньшую скорость, тогда как меньшее количество витков проволоки большего диаметра обеспечивает более высокую скорость, но меньший крутящий момент. В некоторых приложениях добавление редуктора к выходной мощности двигателя обеспечивает идеальное соотношение скорости и крутящего момента, сводя к минимуму стоимость и размеры всего решения.
Этот веб-сайт использует файлы cookie для улучшения вашего опыта. Мы предполагаем, что вы согласны с этим, но вы можете отказаться, если хотите. Настройки cookieACCEPT
Настройки cookieACCEPT
Как рассчитать скорость вращения двигателя
При эксплуатации, мониторинге, ремонте или замене двигателя важно понимать его технические характеристики. Одним из важных измерений является число оборотов в минуту или RPM, которое описывает скорость двигателя. В этом руководстве мы обсудим, как рассчитать число оборотов двигателя и почему это так важно.
Что такое число оборотов двигателя?
Об/мин — это единица измерения, используемая для описания скорости двигателя. Он обозначает количество оборотов в минуту и описывает скорость, с которой вращается ротор, то есть количество раз, которое вал ротора совершает полный оборот в минуту. Его можно использовать для измерения скорости двигателей, турбин, центрифуг, конвейеров и другого оборудования.
Почему важно рассчитывать число оборотов в минуту
Расчет числа оборотов двигателя, а также другие параметры, такие как крутящий момент, напряжение и мощность, необходимы при выборе двигателя для конкретного применения. Расчет скорости двигателя может помочь вам выбрать правильный тип двигателя при замене компонентов и принять более взвешенные решения по ремонту. Вам также необходимо понимать число оборотов в минуту, чтобы эффективно контролировать и контролировать работу двигателя.
Расчет скорости двигателя может помочь вам выбрать правильный тип двигателя при замене компонентов и принять более взвешенные решения по ремонту. Вам также необходимо понимать число оборотов в минуту, чтобы эффективно контролировать и контролировать работу двигателя.
Запросить предложение
Скорости асинхронных двигателей переменного тока
Двигатели переменного тока предназначены для работы на определенных скоростях. Эти скорости одинаковы даже для разных моделей и производителей. Скорость данного двигателя зависит от частоты сети источника питания, а не от напряжения, а также от количества полюсов, которые он имеет. Двигатели переменного тока часто имеют два или четыре полюса, но могут иметь и больше. Связь между полюсами и числом оборотов двигателя связана с магнитным полем, создаваемым полюсами статора. Это поле приводит к созданию магнитных полей в роторе, которые связаны с частотой поля в статоре.
Также необходимо учитывать скольжение, которое представляет собой разницу между синхронной скоростью статора и фактической рабочей скоростью. Ротор всегда вращается немного медленнее, чем магнитное поле статора, и всегда пытается «догнать» его, что создает крутящий момент, необходимый для запуска двигателя.
Ротор всегда вращается немного медленнее, чем магнитное поле статора, и всегда пытается «догнать» его, что создает крутящий момент, необходимый для запуска двигателя.
Чтобы отрегулировать скорость трехфазного двигателя переменного тока, вы можете отрегулировать частоту источника питания двигателя переменного тока с помощью элемента управления. Многие устройства управления переменным током также имеют однофазный вход, что позволяет запускать трехфазные двигатели, даже если у вас нет трехфазного питания. С другой стороны, большинство однофазных двигателей переменного тока не регулируются, поскольку они подключаются непосредственно к стандартной розетке и используют доступную частоту.
Скорости двигателя постоянного тока
Как и асинхронные двигатели переменного тока, двигатели постоянного тока с постоянными магнитами также имеют полюса, но полюса не влияют на скорость, как у двигателей переменного тока. На скорость двигателей постоянного тока влияет несколько других факторов, в том числе рабочее напряжение двигателя, сила магнитов и количество витков провода в якоре.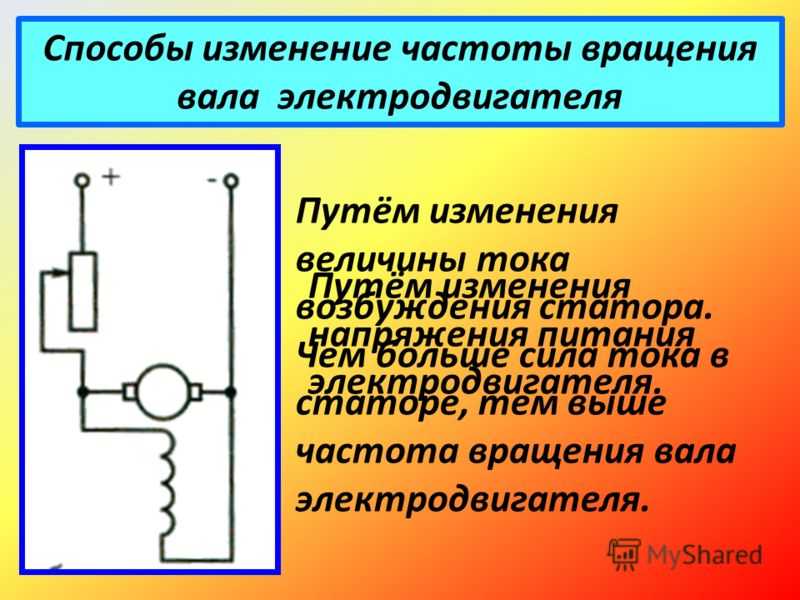 Двигатели постоянного тока могут работать только на скоростях, номинальных для доступного для них напряжения.
Двигатели постоянного тока могут работать только на скоростях, номинальных для доступного для них напряжения.
Если батарея, от которой работает двигатель, начинает разряжаться и подавать меньшее напряжение, скорость двигателя снижается. Если вы подключите двигатель к источнику питания, скорость увеличится, хотя это может вызвать дополнительный износ двигателя. Вы также можете использовать элементы управления для регулировки скорости двигателя постоянного тока, который работает путем изменения напряжения, доступного для двигателя.
Услуги по ремонту двигателей переменного/постоянного тока
Как рассчитать число оборотов двигателя
Чтобы рассчитать число оборотов асинхронного двигателя переменного тока, умножьте частоту в герцах (Гц) на 60 — для количества секунд в минуте – на два для отрицательные и положительные импульсы в цикле. Затем вы делите на количество полюсов двигателя:
- (Гц x 60 x 2) / количество полюсов = об/мин без нагрузки
Вы также можете рассчитать рейтинг проскальзывания, вычитая номинальную скорость при полной нагрузке из синхронной скорости, разделив результат на синхронную скорость и умножив его на 100:
- ((синхронная скорость – номинальная скорость при полной нагрузке) / (синхронная скорость)) x 100 = коэффициент скольжения
Затем, чтобы найти число оборотов при полной нагрузке, вы конвертируете показатель скольжения в число оборотов в минуту, а затем вычитаете его из числа оборотов без нагрузки:
- Для расчета оборотов при полной нагрузке: об/мин – проскальзывание оборотов = обороты при полной нагрузке
Скорость вращения двигателя постоянного тока зависит от напряжения, подаваемого на двигатель. Как правило, производитель двигателя сообщает вам число оборотов в минуту, которое вы можете ожидать при различных напряжениях. Чтобы достичь желаемых оборотов, вы можете отрегулировать напряжение в соответствии с рекомендациями.
Как правило, производитель двигателя сообщает вам число оборотов в минуту, которое вы можете ожидать при различных напряжениях. Чтобы достичь желаемых оборотов, вы можете отрегулировать напряжение в соответствии с рекомендациями.
Примеры расчета формулы оборотов двигателя
Давайте рассмотрим некоторые примеры формулы оборотов. Для двигателя переменного тока число полюсов и частота определяют число оборотов холостого хода. Для системы с частотой 60 Гц с четырьмя полюсами уравнение оборотов будет следующим:
- (Гц x 60 x 2) / количество полюсов = число оборотов без нагрузки
- (60 х 60 х 2) / 4
- 7 200 / 4 = 1 800 об/мин
Величина скольжения незначительно зависит от конструкции двигателя. Разумная скорость при полной нагрузке для четырехполюсного двигателя с частотой 60 Гц составляет 1725 об/мин. Скольжение – это разница между скоростью без нагрузки и скоростью с полной нагрузкой. В данном случае это будет:
- Обороты при полной нагрузке – Обороты без нагрузки = проскальзывание оборотов
- 1800 – 1725 = 75 об/мин
При 60 Гц двухполюсный двигатель работает со скоростью 3600 об/мин без нагрузки и около 3450 об/мин с нагрузкой:
- (Гц x 60 x 2) / число полюсов = об/мин без нагрузки
- (60 х 60 х 2) / 4
- 7 200 / 2 = 3 600 об/мин
При частоте 60 Гц шестиполюсный двигатель будет работать со скоростью 1200 об/мин без нагрузки и приблизительно со скоростью 1175 об/мин с нагрузкой.
