Как устроены оптические энкодеры. Чем отличаются инкрементальные и абсолютные энкодеры. Какие бывают типы выходных сигналов энкодеров. Где применяются оптические энкодеры в промышленности.
Принцип работы оптических энкодеров
Оптический энкодер — это устройство для преобразования углового перемещения вала в электрические импульсы. Основные компоненты энкодера включают:
- Источник света (обычно светодиод)
- Кодирующий диск с прорезями
- Фотоприемник
- Электронную схему обработки сигналов
Принцип действия оптического энкодера основан на прерывании светового потока вращающимся кодирующим диском. При вращении вала диск периодически перекрывает световой луч, падающий на фотоприемник. В результате на выходе энкодера формируется последовательность электрических импульсов, частота которых пропорциональна скорости вращения вала.
Инкрементальные и абсолютные энкодеры
Существует два основных типа оптических энкодеров:
Инкрементальные энкодеры
Инкрементальные энкодеры выдают последовательность импульсов при вращении вала. Они позволяют определить:
- Угол поворота вала
- Скорость вращения
- Направление вращения (при наличии двух каналов A и B)
Для определения абсолютного положения вала требуется дополнительный импульс начала отсчета (нулевая метка).
Абсолютные энкодеры
Абсолютные энкодеры позволяют определить точное угловое положение вала в любой момент времени без необходимости подсчета импульсов. Они имеют многодорожечный кодирующий диск, формирующий уникальный код для каждого углового положения.
Преимущества абсолютных энкодеров:
- Не требуют начальной привязки
- Сохраняют информацию о положении при отключении питания
- Высокая помехозащищенность
Разрешающая способность энкодеров
Разрешающая способность энкодера — это количество импульсов, генерируемых за один полный оборот вала. Она определяет точность измерения угла поворота.
Типичные значения разрешения:
- 100-1000 имп/об — для простых применений
- 1000-5000 имп/об — для промышленных энкодеров
- 10000-100000 имп/об — для прецизионных измерений
Высокое разрешение позволяет точнее определять положение и скорость, но увеличивает стоимость энкодера. При выборе необходимо учитывать требования конкретной задачи.
Типы выходных сигналов энкодеров
Оптические энкодеры могут иметь различные типы выходных сигналов:
Транзисторный выход Push-Pull
Простой тип выхода с тремя каналами A, B и Z. Каждый канал может быть подключен как NPN или PNP. Уровень сигнала определяется относительно напряжения питания.
Дифференциальный выход Line Driver
Использует три пары дифференциальных сигналов AA, BB, ZZ. Обеспечивает лучшую помехозащищенность при передаче на большие расстояния. Бывает двух типов:
- TTL — фиксированный уровень сигнала 5В
- HTL — уровень сигнала 5-24В, соответствует напряжению питания
Применение оптических энкодеров в промышленности
Оптические энкодеры широко используются в различных отраслях промышленности для решения следующих задач:
Управление электроприводами
Энкодеры применяются в системах векторного управления электроприводами для обеспечения обратной связи по скорости и положению. Это позволяет повысить точность регулирования скорости и момента двигателя.
Станки с ЧПУ
В станках с числовым программным управлением энкодеры используются для контроля положения и скорости перемещения рабочих органов. Высокоточные энкодеры обеспечивают прецизионную обработку деталей.

Роботизированные системы
Энкодеры применяются в приводах роботов для определения положения звеньев манипулятора. Это необходимо для точного позиционирования рабочего инструмента.
Упаковочное оборудование
В автоматических линиях для упаковки и маркировки продукции энкодеры используются для синхронизации работы отдельных узлов. Например, для согласования скорости подачи этикеток со скоростью движения конвейера.
Выбор оптического энкодера
При выборе оптического энкодера для конкретной задачи необходимо учитывать следующие параметры:
- Тип энкодера (инкрементальный или абсолютный)
- Требуемое разрешение
- Тип выходного сигнала
- Максимальная рабочая скорость
- Условия эксплуатации (температура, влажность, вибрации)
- Конструктивное исполнение (размер, тип вала, способ крепления)
Правильный выбор энкодера позволяет оптимизировать соотношение цена/качество и обеспечить надежную работу оборудования.
Преимущества оптических энкодеров
Оптические энкодеры обладают рядом преимуществ по сравнению с другими типами датчиков угла поворота:

- Высокая точность измерений
- Широкий диапазон разрешений
- Отсутствие механического контакта и износа
- Высокая надежность и долговечность
- Простота монтажа и обслуживания
- Возможность работы на высоких скоростях
Эти преимущества обусловили широкое распространение оптических энкодеров в современной промышленной автоматизации.
Заключение
Оптические энкодеры являются ключевым элементом систем автоматизации, обеспечивая точное измерение угла поворота, скорости и положения. Понимание принципов работы и особенностей различных типов энкодеров позволяет правильно выбрать и применить эти устройства в промышленном оборудовании.
Оптические энкодеры | РОБОТОША
Первые оптические энкодеры были разработаны в середине 1940-х годов «Фортепианной компанией Болдуина» для использования в качестве «тоновых колес», которые позволяли электрическим органам имитировать другие музыкальные инструменты. Современные устройства в основном представляют собой миниатюрные версии датчика приближения с использованием прерывания света. В энкодере сфокусированный луч света, направлен на совмещенный с излучателем фотоприемник, периодически прерывается вращающимся диском, расположенным между приемником и передатчиком света и закрепленный на валу контролируемого объекта. Диск может быть непрозрачным с отверстиями, либо прозрачным с нанесенным на него кодированным рисунком. По сравнению с более сложными преобразователями переменного тока, это простая схема кодирования реализует, по существу, цифровой вывод результатов с оптических датчиков в недорогой надежной конструкции с хорошей помехоустойчивостью.
Есть два основных типа оптических энкодеров: инкрементные и абсолютные. Инкрементный энкодер измеряет скорость вращения и может выдать относительное положение, в то время как абсолютный энкодер измеряет непосредственно угловое положение и на выходе дает скорость. Если не принимать во внимание изменение информации о местоположении, то с инкрементным энкодером, как правило, легче работать и он обеспечивает эквивалентное разрешение при гораздо более низкой стоимости, чем абсолютные оптические энкодеры.
Инкрементный энкодер измеряет скорость вращения и может выдать относительное положение, в то время как абсолютный энкодер измеряет непосредственно угловое положение и на выходе дает скорость. Если не принимать во внимание изменение информации о местоположении, то с инкрементным энкодером, как правило, легче работать и он обеспечивает эквивалентное разрешение при гораздо более низкой стоимости, чем абсолютные оптические энкодеры.
Инкрементный оптический энкодер
Оптические поворотные инкрементные энкодеры, еще их называют датчиками угла поворота, стали наиболее популярным устройством для измерения угловой скорости и положения в моторах, на валу колеса или рулевого механизма. В мобильных роботах, энкодеры используются для контроля положения или скорости колес и других, управляемых при помощи моторов соединений. Из-за того, что энкодеры являются проприоцептивными датчиками, их оценка положения является лучшей в системе координат робота и, при решении задачи локализации робота (см. слайды «Проблема локализации мобильного робота»), требуются значительные поправки.
слайды «Проблема локализации мобильного робота»), требуются значительные поправки.
Принцип действия инкрементного энкодера
Простейшим типом инкрементного энкодера является одноканальный тахометр, обычно состоящий из механического прерывателя света, производящего определенное количество прямоугольных или синусоидальных импульсов, при каждом обороте вала. Увеличение числа импульсов увеличивает разрешение (и стоимость) модуля. Разрешение энкодера измеряется в числе отсчетов на оборот (CPR, cycles per revolution). Минимальное угловое разрешение легко вычислить по величине CPR. Типичный энкодер в мобильной робототехнике имеет значение 2000 CPR, в то же время промышленный оптический энкодер может иметь параметр CPR равный 10000. С точки зрения требуемого диапазона, конечно же важно, чтобы энкодер был достаточно быстрым, чтобы успевать считывать значения на предполагаемой скорости вращения. Промышленные оптические энкодеры полностью удовлетворяют требованиям, предъявляемым в робототехнических приложениях.
Эти, относительно недорогие устройства используются в качестве датчиков скорости в цепи обратной связи в системах управления, работающих на средних и высоких скоростях, но на очень малых скоростях чувствительны к шумам и проблемам со стабилизацией из-за ошибок квантования. Здесь нужно искать компромисс между разрешением и скоростью обновления: улучшенная переходная характеристика требует большей скорости обновления, которая для данного числа линий уменьшает число возможных импульсов энкодера для интервала дискретизации.
В дополнение к нестабильности на низких скоростях, одноканальный тахометр также неспособен определять направление вращения и, следовательно, не может быть использован в качестве датчика положения. Квадратурные энкодеры, преодолели эти проблемы путем добавления второго канала, смещенного относительно первого, поэтому результирующие последовательности импульсов сдвинуты по фазе на 90 градусов, как показано на рисунке ниже. Этот метод позволяет декодирующей электронике определить, какой канал опережает другой и, следовательно, установить направление вращения.![]() Кроме того, четыре детектируемых различных состояния увеличивают разрешение в четыре раза без изменения диска прерывателя. Таким образом, энкодер, имеющий 2000 CPR выдаст при квадратурной реализации даст уже 8000 отсчетов. Дальнейшее улучшение возможно путем измерения синусоидальной волны с помощью оптического детектора и выполнения сложной интерполяции. Такие методы, хотя и редко используемые в мобильной робототехнике, могут дать 1000-кратное увеличение разрешения.
Кроме того, четыре детектируемых различных состояния увеличивают разрешение в четыре раза без изменения диска прерывателя. Таким образом, энкодер, имеющий 2000 CPR выдаст при квадратурной реализации даст уже 8000 отсчетов. Дальнейшее улучшение возможно путем измерения синусоидальной волны с помощью оптического детектора и выполнения сложной интерполяции. Такие методы, хотя и редко используемые в мобильной робототехнике, могут дать 1000-кратное увеличение разрешения.
Принцип действия квадратурного инкрементного оптического энкодера
Следствием инкрементного характера фазо-квадратурных выходных сигналов является то, что любое разрешение углового положения может быть выражено не в абсолютной форме, а только относительно некоторой опорной точки. Создание такой точки отсчета может быть произведено несколькими способами. Для приложений, включающих непрерывное вращение на 360 градусов, большинство энкодеров включает в качестве третьего канала специальный индексный выход, который переходит в высокое состояние на каждом полном обороте вала. Промежуточные положения вала затем определяются числом, на которое увеличился, или уменьшился счетчик импульсов от этого известного индексированного положения. Одним из недостатков такого подхода является потеря информации об относительном положении в случае сбоя питания.
Промежуточные положения вала затем определяются числом, на которое увеличился, или уменьшился счетчик импульсов от этого известного индексированного положения. Одним из недостатков такого подхода является потеря информации об относительном положении в случае сбоя питания.
В случае ограниченного вращения, такого как возвратно-поступательное движение вдоль направляющих (как в станках с ЧПУ) можно использовать электрические концевые выключатели и/или механические ограничители для задания исходного положения. Для улучшения повторяемости, возврат в исходное положение разбивается на два этапа. Ось вращается с пониженной скоростью в соответствующем направлении до тех пор, пока не встретится механизм остановки, после чего происходит обраткое вращение в течение предопределенного короткого промежутка времени. Вал вращается медленно обратно до остановки на заданной медленной скорости из этой заданной начальной точки, тем самым, устраняя любые изменения в инерциальной нагрузке, которые могли бы повлиять на окончательное исходное положение. Этот двухэтапный подход используется, например, при старте шагового двигателя для инициализации позиционирования печатающей головки в принтерах.
Этот двухэтапный подход используется, например, при старте шагового двигателя для инициализации позиционирования печатающей головки в принтерах.
С другой стороны, функция абсолютного индексирования может быть основана на каком-то внешнем действии по созданию опорной точки, которое отделено от цикла непосредственного сервоуправления. Хорошей иллюстрацией этой ситуации служит инкрементный датчик, используемый для отслеживания угла рулевого управления платформы. Например, когда робот включается в первый раз, абсолютный угол рулевого управления неизвестен и должен быть инициализирован, используя «привязку» действия к маякам на док-станции, соседней стене, или какой-либо другой идентифицирующий набор ориентиров. Увеличение или уменьшение значения счетчика электронного декодера используется для изменения регистра направления транспортного средства в относительной форме.
Как и большинство проприоцептивных датчиков, энкодеры, как правило, находятся в контролируемой среде внутренней структуры мобильного робота, и поэтому систематическая ошибка и кросс-чувствительность могут быть устранены. Точность оптических датчиков часто предполагается равной 100%, и, хотя это может быть не совсем корректно, какие-либо ошибки оптического датчика являются незначительными ошибками по сравнению с тем, что происходит за валом двигателя.
Точность оптических датчиков часто предполагается равной 100%, и, хотя это может быть не совсем корректно, какие-либо ошибки оптического датчика являются незначительными ошибками по сравнению с тем, что происходит за валом двигателя.
Абсолютный оптический энкодер
Абсолютные энкодеры обычно используются в приложениях с медленным вращением в которых недопустима потенциальная потеря информации о положении. Элементы дискретного детектора в фотоэлектрической матрице индивидуально совмещены с концентрическими дорожками на светопрерывателе, создавая эффект бесконтактной реализации энкодера с щеточными контактами. Назначение отдельной дорожки для каждого бита результирующего разрешения приводит к дискам большего размера (по сравнению с конструкцией инкрементного энкодера) и соответствующему снижению допустимого отклонения при ударе и вибрации. При этом каждая дополнительная дорожка энкодера удваивает разрешение, но учетверяет стоимость датчика.
Принцип действия абсолютного оптического энкодера
Вместо последовательного потока битов, как в инкрементном датчике, абсолютные оптические энкодеры обеспечивают параллельный вывод слова данных с уникальным кодом шаблона для каждого дискретного положения вала. Чаще всего используется код Грея, двоичное и двоично-десятичное кодирование. Характерной особенностью кода Грея (по имени изобретателя Франка Грея из Bell Labs) является то, что только один бит изменяется за раз, помогая избежать тем самым асинхронных неоднозначностей, обусловленными электронными и механическими допусками элементов. С другой стороны, двоичный код постоянно включает множество измененных битов при увеличении или уменьшении счета на единицу. Например, при переходе из положения 255 в положение 0, восемь бит меняются с 1 в 0. Так как нет никакой гарантии, что все пороговые детекторы, являющиеся элементами слежения детектора сработают одновременно, в момент перехода будет присутствовать значительная неопределенность в данной схеме кодирования. Поэтому требуется дополнительный сигнал подтверждения правильности данных, если больше чем один бит изменился между последовательными положениями энкодера.
Чаще всего используется код Грея, двоичное и двоично-десятичное кодирование. Характерной особенностью кода Грея (по имени изобретателя Франка Грея из Bell Labs) является то, что только один бит изменяется за раз, помогая избежать тем самым асинхронных неоднозначностей, обусловленными электронными и механическими допусками элементов. С другой стороны, двоичный код постоянно включает множество измененных битов при увеличении или уменьшении счета на единицу. Например, при переходе из положения 255 в положение 0, восемь бит меняются с 1 в 0. Так как нет никакой гарантии, что все пороговые детекторы, являющиеся элементами слежения детектора сработают одновременно, в момент перехода будет присутствовать значительная неопределенность в данной схеме кодирования. Поэтому требуется дополнительный сигнал подтверждения правильности данных, если больше чем один бит изменился между последовательными положениями энкодера.
Поворот 8-битного диска с кодом Грея
На рисунке слева поворот против часовой стрелки на одну позицию становится причиной изменения только одного бита. На рисунке справа такой же поворот двоично-кодированного диска станет причиной изменения всех битов в частном случае (с 255 в 0) иллюстрируя тем самым опорную линию на 12 часов.
На рисунке справа такой же поворот двоично-кодированного диска станет причиной изменения всех битов в частном случае (с 255 в 0) иллюстрируя тем самым опорную линию на 12 часов.
Абсолютные энкодеры лучше всего подходят для медленных и/или редких поворотов, таких как кодирование угла поворота рулевого колеса, в отличие от измерения высокоскоростного непрерывного (например, ведущее колесо) вращения, которое потребует вычисления смещения вдоль всего пути движения. Хотя и не столь надежны как резольверы для высокотемпературных или в приложениях с высокой ударной стойкостью, абсолютные энкодеры могут работать при температурах свыше 125 градусов и средним разрешением (1000 отсчетов на оборот). Потенциальным недостатком абсолютных энкодеров является их параллельный вывод данных, который требует более сложного интерфейса из-за большего количества проводов. 13-битный абсолютный энкодер, использующий дополнительные выходные сигналы для помехоустойчивости потребует 28-жильный кабель (13 сигнальных пар плюс питание и заземление) вместо шести в случае с резольвером или инкрементным энкодером.
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.
PRI (цельный вал): энкодеры оптические инкрементальные OPKON. КИП-Сервис: промышленная автоматика
Инкрементальные энкодеры (датчики угла поворота, преобразователи угловых перемещений) предназначены для преобразования угла поворота или угловой скорости в импульсы. При одном обороте вала энкодер выдает фиксированное количество импульсов. Это количество импульсов — разрешение (количество импульсов на оборот), величина характеризующая точность энкодера.
Для удобства работы импульсы могут быть преобразованы в физическую величину: расстояние (количество оборотов, угол поворота) или в скорость (частоту вращения). Для этого применяют вторичные устройства, обрабатывающие сигнал: счетчики импульсов, тахометры и ПЛК.
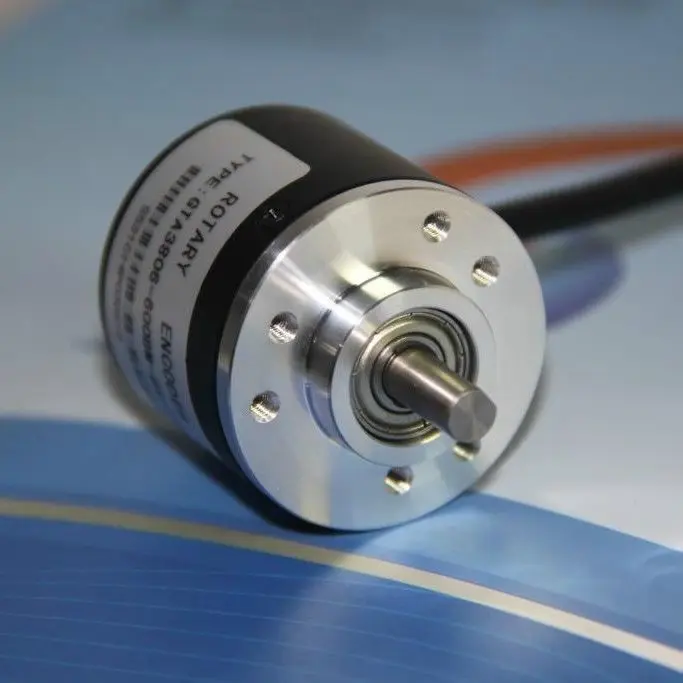
Серия энкодеров PRI — это оптические энкодеры, наиболее универсальные в линейке инкрементальных энкодеров OPKON. Имеют разрешающую способность до 5000 импульсов на оборот, производятся в корпусах диаметром 40 мм или 50 мм.
Имеют разрешающую способность до 5000 импульсов на оборот, производятся в корпусах диаметром 40 мм или 50 мм.
Совместно с оптическими энкодерами серии PRI широко используются аксессуары OPKON, а также энкодеры других серий:
- Муфты соединительные
Предназначены для соединения вала энкодера с механизмом, позволяют компенсировать несоосность. - Энкодеры OPKON PRI 50H с полым валом
Предназначены для установки на вал механизма, занимают минимум пространства. - Серия магнитных энкодеров MRI
Для оборудования, которое подвержено воздействию вибраций и механическим нагрузкам. - Серия OPKON MRV с аналоговым выходом
Для задач, в которых нужно непрерывно контролировать положение объекта.
- Разрешение датчиков: 100, 200, 360, 500, 600, 720, 1000, 1024, 1800, 2000, 2048, 2500, 4000, 4096, 5000 имп/об
- Типы выходов: Push-Pull, LineDriver (TTL, HTL)
- Рабочая температура: -20…+80 °C
- Диаметр корпуса: 40 мм, 50 мм, 58 мм
- Аксессуары для монтажа входят в комплект поставки (для ∅50 мм)
- Кабельный вывод с цветовой маркировкой проводов
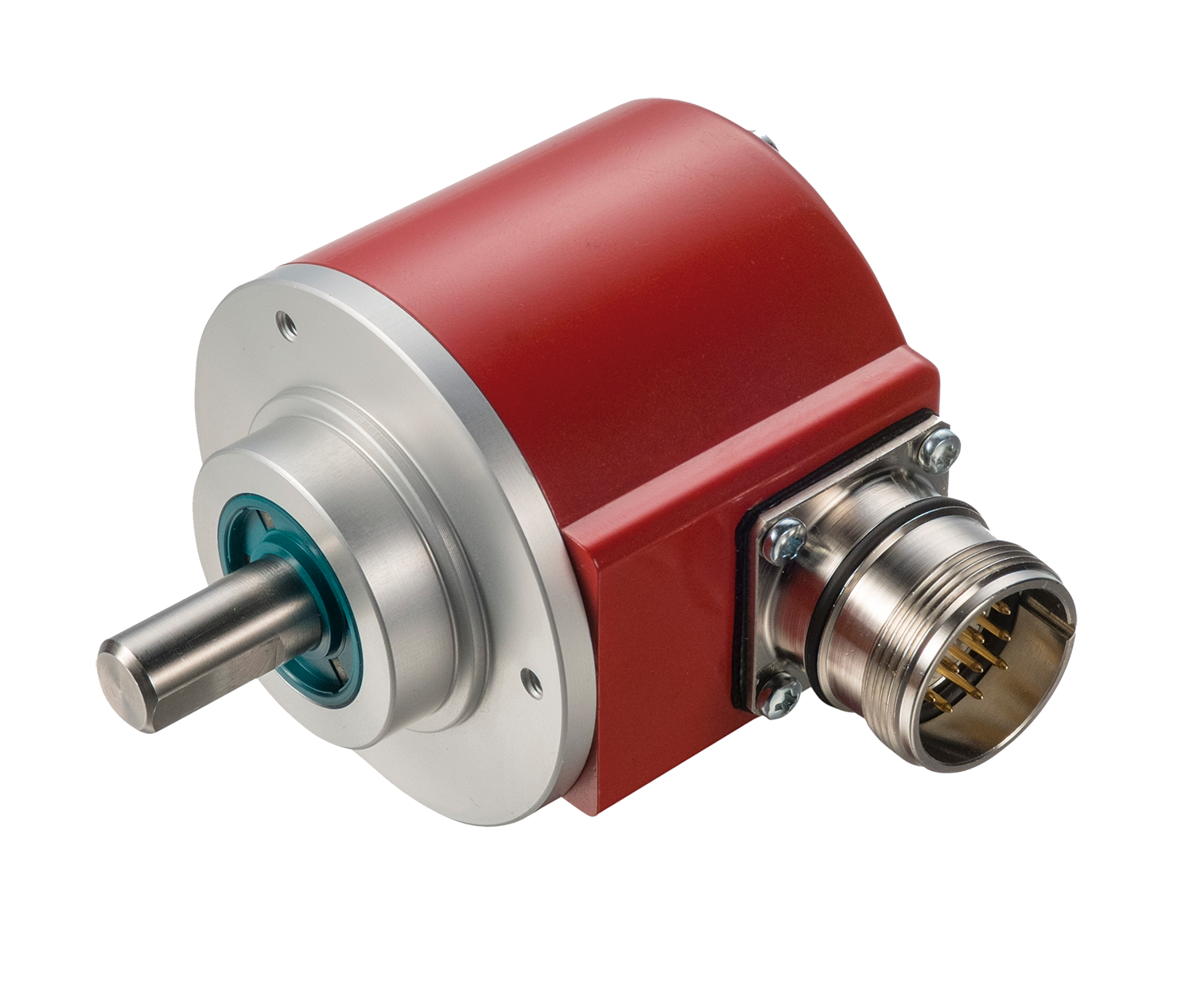
Инкрементальный энкодер — это устройство, преобразующее угловое перемещение вала в нормированный дискретный сигнал.![]() Конструктивно энкодер состоит из измерительного преобразователя, защищенного корпусом и вала, передающего вращательное движение. Для защиты от внешних воздействий измерительной части предусмотрены уплотнения корпуса и вала, обеспечивающие защиту от внешних воздействий IP54. Со стороны вала расположен фланец с резьбовыми отверстиями (М3) для крепления энкодера.
Конструктивно энкодер состоит из измерительного преобразователя, защищенного корпусом и вала, передающего вращательное движение. Для защиты от внешних воздействий измерительной части предусмотрены уплотнения корпуса и вала, обеспечивающие защиту от внешних воздействий IP54. Со стороны вала расположен фланец с резьбовыми отверстиями (М3) для крепления энкодера.
Внутри корпуса располагается фотоприемник (датчик) и взаимодействующий с ним специальный кодирующий диск. В качестве кодирующего диска используется лимб с нанесенными оптическими метками. Во время работы кодирующий диск приводится в движение валом и прерывает световой сигнал.
Таким образом, принцип действия энкодеров OPKON PRI основан на фотоэлектрическом эффекте: при попадании светового потока на фотоприемник, формируется сигнал, соответствующий логической единице, а при его отсутствии — логическому нулю.
Прерывание светового потока осуществляется вращающимся кодирующим диском. Количество прерываний строго постоянно и соответствует количеству меток на кодирующем диске. В характеристиках энкодеров эта величина обозначается как разрешение — количество импульсов, поступающих за один оборот (имп/об, PPR, pulse per revolution). С помощью него можно определить дискретность энкодера — перемещение, соответствующее одному импульсу энкодера.
Количество прерываний строго постоянно и соответствует количеству меток на кодирующем диске. В характеристиках энкодеров эта величина обозначается как разрешение — количество импульсов, поступающих за один оборот (имп/об, PPR, pulse per revolution). С помощью него можно определить дискретность энкодера — перемещение, соответствующее одному импульсу энкодера.
Например, если использовать энкодеры с разрешением 100, 360 и 5000 имп/об, то один импульс будет соответствовать перемещению на 3.6°, 1°, 0.072° соответственно
.Зная разрешение энкодера и считая количество импульсов (контроллером или счетчиком) можно определить:
- Угол поворота (φ).
Подсчет количества импульсов (n), поступивших от энкодера, позволяет определить угол поворота (φ), совершенный валом.φ=n⋅360°Разрешение(имп/об)φ = {n cdot 360°} over {Разрешение (имп/об)}
Пример: если энкодер выдал 1250 импульсов, а сам он имеет разрешение 5000 имп/об, то это означает, что вал совершил поворот на 90° (1250 * 360 / 5000 = 90).
- Угловую скорость (ω).
Для определения скорости вращения (об/мин) необходимо подсчитывать количество импульсов, поступающих за единицу времени (например, за 1 секунду).ω=n⋅60секРазрешение(имп/об)ω = {n cdot 60 сек} over {Разрешение (имп/об)}
Представленные примеры справедливы для механизмов одностороннего действия. Измерение вращения в двух направлениях невозможно, так как один импульсный сигнал не может дать информацию о том, в какой момент произошла смена направления. Для решения этой проблемы в энкодерах используется два фотоприемника со специальным фильтром (маской), формирующих два сигнала (сигнал А и сигнал В). Данная конструкция позволяет энкодеру выдавать два импульсных сигнала, сдвинутых друг относительно друга на ¼ периода (90°).
Смещение сигналов обеспечивает возможность определения направления в пределах одного импульса. При вращении в прямом направление сигнал А всегда будет опережать сигнал В, а при вращении в обратном — наоборот, первым будет сигнал В.
Последовательность импульсов при прямом и обратном вращенииПомимо сигналов А и В в энкодерах дополнительно используется сигнал Z. Он выдает единичный импульс, при прохождении кодирующим диском полного оборота (360°). Сигнал Z позволяет подсчитывать количество оборотов. Таким образом, каждый энкодер оборудован тремя каналами (ABZ) для передачи сигнала.
Разрешение энкодера
Разрешение — это основной параметр энкодера, характеризующий его точность. На первый взгляд может показаться, что лучшим выбором является энкодер с максимальным разрешением. Но они имеют более высокую стоимость и к тому же могут быть не совместимы (по частоте сигнала) с вторичным прибором. Частота сигнала (вторичного прибора) накладывает ограничение на максимальное разрешение и максимальную скорость вращения энкодера.
Например: для ПЛК с максимальной частотой на входе 10 кГц, нужно выбрать энкодер, обеспечивающий дискретность в 1° при максимальной скорости вращения 3000 об/мин.
- Если выбрать энкодер в соответствии с требуемой точностью, то необходима модель 360 имп/об. Но максимальная скорость не должна превышать 1667 об/мин.
- Если выбирать энкодер, соответствующий по скорости вращения, то это модель 200 имп/об. Но при таком разрешении обеспечивается точность 1.8°.
200 имп/об — это номинальное разрешение энкодера, но при использовании специальных алгоритмов счета его можно увеличить в 2 и в 4 раза. Для этого при счете учитываются сигнал не только канала А, но и канала В. При счете по двум каналам, для каждого импульса можно выделить четыре промежуточных состояния:
- Сигнал А = лог. «1», Сигнал В = лог. «0»
- Сигнал А = лог. «1», Сигнал В = лог. «1»
- Сигнал А = лог. «0», Сигнал В = лог. «1»
- Сигнал А = лог.
 «0», Сигнал В = лог. «0»
«0», Сигнал В = лог. «0»
Существует три основных режима счета.
- X1
Счет импульсов производится только по переднему фронту одного сигнала. Количество импульсов, выдаваемых на один оборот соответствует номинальному разрешению энкодера.
Пример: с помощью энкодеров с разрешением 100, 200 и 1000 имп/об возможно отслеживание перемещения с точностью 3.6°, 1.8°, 0.36° соответственно.
- X2
При счете импульсов учитываются и передний и задний фронты. Таким образом стандартный шаг разбивается пополам, а разрешение увеличивается вдвое.
Пример: с помощью энкодеров с разрешением 100, 200 и 1000 имп/об возможно отслеживание перемещения с точностью 1.8°, 0.9°, 0.18° соответственно.
- X4
Для достижения максимальной разрешающей способности счет осуществляется по переднему и заднему фронтам обоих сигналов. Используя такой метод счета разрешение увеличивается в 4 раза.
Пример: с помощью энкодеров с разрешением 100, 200 и 1000 имп/об возможно отслеживание перемещения с точностью 0.9°, 0.45°, 0.09° соответственно.
Типы выходных сигналов
Для передачи сигнала энкодеры могут быть оборудованы тремя типами выходов:
- Транзисторный выход Push-Pull
Для передачи сигнала используется три канала A, B и Z. Каждый из них может быть включен по схеме NPN и PNP.
Уровень сигнала (лог. «1» или «0» ) определяется относительно питающего напряжения. На рисунке справа представлена условная схема подключения.
- Дифференциальный выход LineDriver TTL
Для передачи сигнала используется три пары сигналов AA, BB, ZZ.
Каждая пара передает дифференциальный сигнал. Уровень сигнала — 5 В. Дифференциальная передача необходима при наличии внешних источников ЭМ-помех или при большой длине сигнального кабеля.
- Дифференциальный выход LineDriver HTL
Данный тип выхода аналогичен модификации LineDriver TTL. Но у модификации HTL уровень сигнала не фиксированный (5 В), а может изменяться в диапазоне от 5 до 24 В. Уровень сигнала соответствует питающему напряжению (см. рисунок справа).
Но у модификации HTL уровень сигнала не фиксированный (5 В), а может изменяться в диапазоне от 5 до 24 В. Уровень сигнала соответствует питающему напряжению (см. рисунок справа).
Таким образом, энкодер модификации HTL может выдавать сигнал, соответствующий TTL-логике, для этого достаточно лишь использовать блок питания 5 В. К тому же модификация LineDriver HTL может использоваться, и как обычный энкодер с Push-Pull-выходом.
Благодаря этому модификация LineDriver HTL (HLD) является полностью взаимозаменяемой с LineDriver TTL и Push-Pull.
Универсальные выходы LineDriver
Каждый из выходных сигналов (A, А, B, B, Z, Z) энкодеров OPKON PRI (модификации HTL) является универсальным (реализован по схеме Push-Pull) работает с NPN, и PNP-входами. Это дает возможность использовать энкодеры с выходом LineDriver для передачи сигнала по стандартной дифференциальной схеме и по однопроводной схеме (без инвертированных сигналов).
Подключение энкодера PRI 50AR6 HLD 1000 Z V3 2M5R SL-TS к контроллеру с NPN-входамиПодключение энкодера PRI 50AR6 HLD 1024 Z V3 2M5R SL-TS к оборудованию с PNP-входами
Помехозащищенность дифференциального выходного сигнала
При использовании энкодеров со стандартным выходом (ABZ) возможно возникновение ложных срабатываний.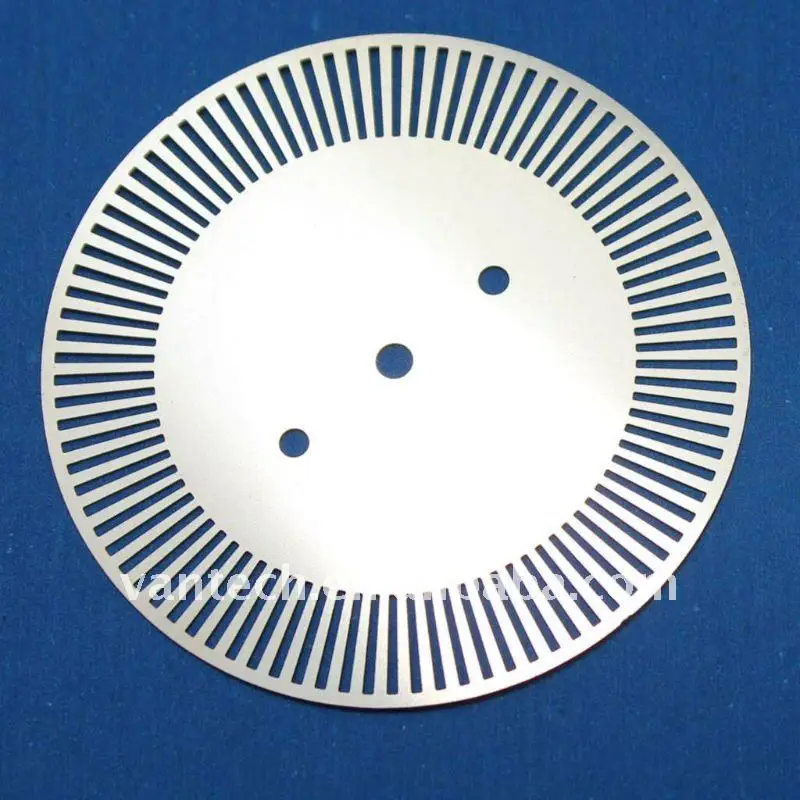 Это может происходить из-за большой длины сигнального кабеля, стороннего оборудования (излучение ЭМ-помех) или при несоблюдение правил монтажа. Для работы в таких условиях рекомендуется использовать энкодеры с дифференциальным выходом (A, A,B, B, Z, Z).
Это может происходить из-за большой длины сигнального кабеля, стороннего оборудования (излучение ЭМ-помех) или при несоблюдение правил монтажа. Для работы в таких условиях рекомендуется использовать энкодеры с дифференциальным выходом (A, A,B, B, Z, Z).
Помехозащищенность дифференциального сигнала выше, т.к. вторичное устройство (счетчик) отслеживает разницу между двумя сигналами (A и A), а не между одиночным сигналом и уровнем питающего напряжения (А и Vобщ.). Таким образом, помехи одинаково влияющие на два проводника (A и A) при дальнейшей обработке сигнала (дифференциальным усилителем вторичного устройства) фильтруются и не вносят ошибок в измерения.
Отличия работы энкодеров со стандартным и дифференциальным выходными сигналамиСписок применений:
- Электропривод с векторным управлением
- Контроль скорости на автоматическом аппликаторе этикеток
- Контроль положения инструмента на станке с ЧПУ
- Защита от раскачивания груза подвесной кран-балки
Электропривод с векторным управлением
Использование энкодера OPKON PRI в качестве обратной связи электроприводаДля повышения качества регулирования электропривода применяются датчики обратной связи.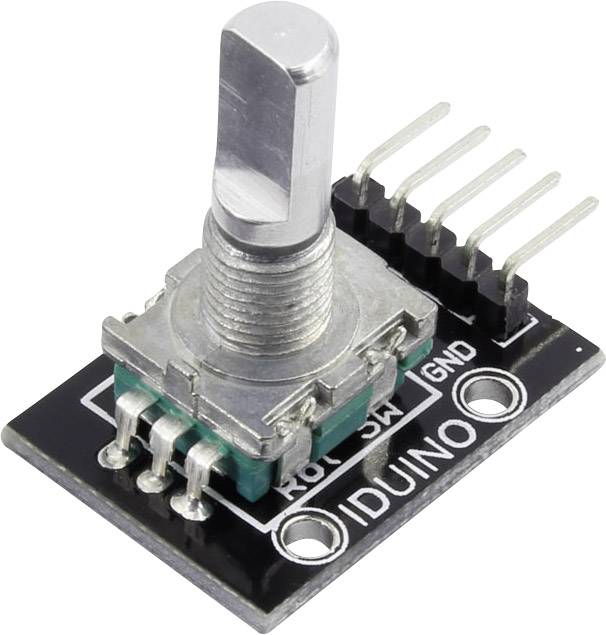 К преобразователю частоты ELHART EMD-VL может быть подключен энкодер OPKON PRI 40AR6 HLD 1024 Z V3 2M5R SL-RF. Использование векторного режима с обратной связью позволяет повысить точность поддержания скорости. Для подключения энкодеров используются карты расширения для ПЧ EMD-V-PGC, EMD-V-PGC1 и EMD-V-PGC2.
К преобразователю частоты ELHART EMD-VL может быть подключен энкодер OPKON PRI 40AR6 HLD 1024 Z V3 2M5R SL-RF. Использование векторного режима с обратной связью позволяет повысить точность поддержания скорости. Для подключения энкодеров используются карты расширения для ПЧ EMD-V-PGC, EMD-V-PGC1 и EMD-V-PGC2.
Контроль скорости на автоматическом аппликаторе этикеток
Пример контроля скорости с помощью инкрементального энкодера PRI в автоматическом аппликаторе этикетокЭнкодеры OPKON PRI 40AR6 HLD 1024 Z V3 2M5R SL-TS применяются в этикетировочных машинах для измерения скорости подачи продукта или конвейера. Измерение скорости подачи коробок дает возможность синхронизировать скорости подачи этикеток и самого конвейера. При приближении коробки к ультразвуковому датчику microsonic nero подается команда запуска аппликатора. Запускается привод ELHART EMD-MINI, отвечающий за размотку и нанесение на коробку этикетки. При срабатывании датчика наличия этикетки microsonic esf-1 частотный преобразователь EMD-MINI останавливается. Применение энкодера позволяет автоматически изменять скорость разматывающего устройства (ПЧ EMD-MINI).
Применение энкодера позволяет автоматически изменять скорость разматывающего устройства (ПЧ EMD-MINI).
Контроль положения инструмента на станке с ЧПУ
Контроль положения инструмента на станке с ЧПУЭнкодер OPKON PRI 50AR6 HLD 5000 Z V3 2M5R SL-TS применяется для измерения положения инструмента на фрезерном станке с ЧПУ. Датчик присоединяется к ведомому валу и передает инкрементальный сигнал на стойку управления, таким образом контроллер отслеживает скорость и положение инструмента при фрезеровании. Также энкодер может устанавливаться на вал шпинделя для контроля оборотов фрезы. Благодаря высокому разрешению энкодера PRI50 (до 5000 имп/об) достигается высокая точность обработки детали. Для управления высокоскоростным шпинделем используется ПЧ EMD-MINI, обеспечивающий выходную частоту до 999 Гц.
Защита от раскачивания груза подвесной кран-балки
Использование энкодера для защиты от раскачивания груза подвесной кран-балкиПри движении ходовой каретки по путям возможно раскачивание груза. Для защиты от раскачивания применяется энкодер OPKON PRI 40AR6 HLD 1024 Z V3 2M5R SLRF совместно с преобразователем частоты EMD-VH. Применение ПЧ, работающего в векторном режиме с обратной связью позволяет плавно регулировать скорость движения без резких ускорений и рывков, тем самым снизить время простоя.
Для защиты от раскачивания применяется энкодер OPKON PRI 40AR6 HLD 1024 Z V3 2M5R SLRF совместно с преобразователем частоты EMD-VH. Применение ПЧ, работающего в векторном режиме с обратной связью позволяет плавно регулировать скорость движения без резких ускорений и рывков, тем самым снизить время простоя.
| Модификация | PRI 40 | PRI 50 | PRI 58 |
|---|---|---|---|
| Диаметр корпуса | 40 мм | 50 мм | 58 мм |
| Тип вала | цельный | ||
| Разрешение | 100, 200, 360, 500, 600, 1000, 1024 имп/об |
100, 200, 360, 500, 600, 720, 1000, 1024, 1800, 2000, 2048, 2500, 3600, 4000, 4096, 5000 имп/об |
|
| Выходной сигнал | Push-Pull, TTL, HTL | ||
| Напряжение питания | =5 В, =5…24 В | ||
| Максимальная скорость вращения | 3500 об/мин | ||
| Степень защиты | IP54 | ||
| Максимальная радиальная нагрузка на вал | 80 Н | 100 Н | 60 Н |
| Максимальная осевая нагрузка на вал | 40 Н | 60 Н | 40 Н |
| Рабочая температура | -20…+80 °C | ||
| Температура хранения | -30…+90 °C | ||
| Материал корпуса | алюминий, сталь | ||
| Материал вала | нержавеющая сталь | ||
| Диаметр вала | 4 / 6 мм | 6 / 8 / 10 мм | |
| Крепление | 3 отверстия М3 | ||
| Наименование составляющих комплекта |
PRI 40AR4 | PRI 40AR6 | PRI 50AR6 PRI 50AR8 PRI 50AR10 |
PRI 58AR6 PRI 58AR8 PRI 58AR10 |
|---|---|---|---|---|
| Г-образный кронштейн | ||||
| Муфта |
Инкрементальный оптический энкодер OPKON PRI40
Габаритные размеры инкрементального оптического энкодера OPKON PRI40, мм
| R | D |
|---|---|
| ∅ 4 мм | 3,3 мм |
| ∅ 6 мм | 5,3 мм |
Инкрементальный оптический энкодер OPKON PRI50
Габаритные размеры инкрементального оптического энкодера OPKON PRI50, мм
| R | D |
|---|---|
| ∅ 6 мм | 5,5 мм |
| ∅ 8 мм | 7,3 мм |
| ∅ 10 мм | 9 мм |
Инкрементальный оптический энкодер OPKON PRI58
Габаритные размеры инкрементального оптического энкодера OPKON PRI58, мм
| R | D |
|---|---|
| ∅ 6 мм | 5 мм |
| ∅ 8 мм | 7 мм |
| ∅ 10 мм | 9 мм |
Подключение энкодеров c выходным сигналом Push-Pull
Схема подключения к вторичному прибору с входами PNPСхема подключения к вторичному прибору с входами NPNПоследовательность импульсов при прямом вращении (по часовой стрелке)
| Контакт | Обозначение | Описание |
|---|---|---|
| Коричневый | V+ | Питание, 5…24 В |
| Белый | V- | Питание, 0 В |
| Желтый | A | Выходной сигнал, фаза А |
| Зеленый | B | Выходной сигнал, фаза B |
| Серый | Z | Выходной сигнал, фаза Z |
| Экран | GND | Заземление |
Подключение энкодеров PRI c выходным сигналом LineDriver
Схема подключения инкрементального энкодера к вторичному прибору с дифференциальным выходомПоследовательность импульсов при прямом вращении (по часовой стрелке)
| Контакт | Обозначение | Описание |
|---|---|---|
| Коричневый | V+ | Питание, 5…24 В |
| Белый | V- | Питание, 0 В |
| Желтый | A | Выходной сигнал, фаза А |
| Синий | A | Выходной сигнал, фаза A |
| Зеленый | B | Выходной сигнал, фаза B |
| Красный | B | Выходной сигнал, фаза B |
| Серый | Z | Выходной сигнал, фаза Z |
| Розовый | Z | Выходной сигнал, фаза Z |
| Экран | GND | Заземление |
| PRI | * | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 40 мм | 40 | |||||||||
| 50 мм | 50 | |||||||||
| 58 мм | 58 | |||||||||
| Стандартное исполнение | A | |||||||||
| 4 мм | R4 | |||||||||
| 6 мм | R6 | |||||||||
| 8 мм | R8 | |||||||||
| 10 мм | R10 | |||||||||
| Push-Pull | LTP | |||||||||
| TTL Linedriver | LD | |||||||||
| HTL Linedriver | HLD | |||||||||
| PRI40: 100, 200, 360, 500, 600, 1000, 1024 имп/об |
100…1024 | |||||||||
| PRI50, PRI58: 100, 200, 360, 400, 500, 600, 720, 1000, 1024, 1800, 2000, 2048, 2500, 3600, 4000, 4096, 5000 имп/об |
100…5000 | |||||||||
| Каналы A и B | B | |||||||||
| Каналы A, B и Z | Z | |||||||||
| =5 В | V1 | |||||||||
| =5…24 В | V3 | |||||||||
| Кабель 2,5 метра | 2M5 | |||||||||
| Кабель 5 метров | 5M | |||||||||
| Угловой | R | |||||||||
* — модификация энкодера определяется производителем.
Пример: PRI 40AR6 HLD 500 Z V3 2M5R SL-RF.
Оптический энкодер или шутка производителя
Рано или поздно в жизни каждого самоделкина возникает потребность в покупке чего-то такого этакого, что обычно само в голову не придет. Вот и я жил себе спокойно и об энкодерах даже не задумывался.
Хотя должен признаться опыт работы с энкодерами имел. Как-то в одной и поделок использовал энкодер из принтера.
В данной истории все приключилось внезапно. Ползая по своим хоббийным форумам натолкнулся на конкурс. Сайт (называть не буду, т.к. разговор не о нем) проводил видимо раскрутку посещаемости и плюс один из форумчан проводил раскрутку своих российского производства изделий. И разыгрывался комплект из 3 наборов для самостоятельной сборки сервоконтроллеров. Я зарегистрировался на этом форуме, подал заявку (вместе с 3 или 4-мя всего лишь участниками) и… выиграл.
Так я стал обладателем 3-х наборов для сборки сервоконтроллеров. Далее мне потребовались энкодеры. Позволю себе объяснить для читателей не так глубоко погруженных в электронные компоненты, что такое сервоконтроллер, энкодер и с чем все это едят.
Далее мне потребовались энкодеры. Позволю себе объяснить для читателей не так глубоко погруженных в электронные компоненты, что такое сервоконтроллер, энкодер и с чем все это едят.
Есть 2 основных способа управлять точным перемещением в изделиях с ЧПУ (числовое программное управление). Попробую объяснить максимально доступным языком, без сложных схем и терминов.
Первый способ это шаговые двигатели. Шаговый двигатель имеет сложное устройство — несколько катушек, притягивающих сердечник в заданных положениях.
Количество положений, в которых может быть зафиксирован сердечник называется шагами, промежуточные положения (регулируются различными промежуточными напряжениями и соответственно магнитными полями) называют микрошагами. Управляет шаговым двигателем драйвер — это плата управления, как правило с микропереключателями шагов и регулировкой тока, протекающего через двигатель. На вход драйвера подаются сигналы: Enable (разрешить работу шагового двигателя), DIR (направление вращения), STEP (количество шагов, на которое двигателю необходимо повернуть вал). И драйвер переводит команды в обороты вала двигателя. Очень простая и надежная конструкция. Из минусов — скорость вращения двигателя ограничена из-за его конструктива, и если двигатель пропустит по той или иной причине шаги, то управляющая программа об этом не узнает. Отсюда и область применения — низко и среднескоростные двигатели в заданной области нагрузок. Например 3Д принтер или хоббийные станки.
И драйвер переводит команды в обороты вала двигателя. Очень простая и надежная конструкция. Из минусов — скорость вращения двигателя ограничена из-за его конструктива, и если двигатель пропустит по той или иной причине шаги, то управляющая программа об этом не узнает. Отсюда и область применения — низко и среднескоростные двигатели в заданной области нагрузок. Например 3Д принтер или хоббийные станки.
Второй способ управлять перемещениями — сервомотор. Мотор сам по себе может быть любым, постоянного или переменного тока, без разницы. Единственное условие, его вал должен иметь энкодер. Энкодер — это устройство определения позиции вала в данный момент времени. Об энкодерах мы поговорим подробнее чуть позже. Сервоконтроллер имеет другой принцип работы, в отличии от драйвера шагового двигателя. Сервоконтроллер получает на входе те же самые сигналы Enable, STEP, DIR и подает на двигатель напряжение. Двигатель начинает вращаться в нужном направлении, энкодер возвращает данные о положении вала двигателя. Как нужное положение достигается, вал двигателя в нем фиксируется. Конечно это сильно упрощено, т.к. есть ускорение и торможение двигателя, управление током и напряжением, пропорционально-интегрально-дифференцирующий (ПИД) регулятор в контуре обратной связи,… но мы же договорились в этот раз не сильно лезть в теорию.
Как нужное положение достигается, вал двигателя в нем фиксируется. Конечно это сильно упрощено, т.к. есть ускорение и торможение двигателя, управление током и напряжением, пропорционально-интегрально-дифференцирующий (ПИД) регулятор в контуре обратной связи,… но мы же договорились в этот раз не сильно лезть в теорию.
Какие же плюсы серводвигателей: любая скорость вращения, отсутствие пропуска шагов, бесшумность (шаговый двигатель ощутимо громок в работе из-за своего конструктива). Но цена сервоконтроллеров выше и существенно драйверов шаговых двигателей. Поэтому основная ниша сервоконтроллеров — профессиональное применение.
Для своего проекта я выбрал двигатели Динамо Сливен. Эти двигатели широко использовались в советское время в ЭВМ и их было какое-то нереально большое количество. Кажется, что практически любой хоббийщик или имеет такой двигатель или сталкивался с ним. На барахолках их до сих пор перепродают. Это двигатели постоянного тока с фантастическим неубиваемым ресурсом и устойчивостью к любым издевательствам.
В качестве сервоконтроллера я использовал выигранную плату. Она представляет собой развитие open source сервоконтроллера, известного под устойчивым брендом «сервоконтроллер Чена» — по имени китайца, году так в 2004-м, если не ошибаюсь, предложившим данную схему.
Теперь уже практически переходим сути обзора — к энкодерам. Выбор энкодера был осуществлен по характеристикам и цене. Какие бывают типы энкодеров. В основном это оптические и магнитные. Магнитные — когда на краях диска закреплены магниты, а возле них находится датчик Холла.
Решение дорогое, промышленное, обладает повышенной надежностью. Цена не хоббийная ни разу.
Оптические энкодеры. Самое распространенное решение. Есть в каждой мышке. Раньше отвечали за вращение шарика и колесика. Теперь шариков уже нет, а вот колесики остались. Принцип работы прост — прерывание светового пучка проходящим непрозрачным телом.
Оптические энкодеры есть 2-х типов: инкрементальные и абсолютные. Инкрементальные делятся на 2 подтипа. Простейшие инкрементальные — такие как изображены на рисунке выше. Они определяют пересечение светового потока и на их основе можно построить, например, тахометр. Недостаток данного энкодера состоит в том, что при помощи него невозможно определить направление вращения диска. Инкрементальные 2-х канальные решают задачу определения направления вращения диска.
Инкрементальные делятся на 2 подтипа. Простейшие инкрементальные — такие как изображены на рисунке выше. Они определяют пересечение светового потока и на их основе можно построить, например, тахометр. Недостаток данного энкодера состоит в том, что при помощи него невозможно определить направление вращения диска. Инкрементальные 2-х канальные решают задачу определения направления вращения диска.
Для этого используется не один фотодиод, а несколько, обычно 4. Они формируют 2 независимых канала передачи данных, и сравнивая сигналы с этих каналов можно однозначно сделать вывод о направлении вращения диска.
Какие же недостатки есть у данного инкрементального энкодера? Недостаток один, но для ряда применений он критичный. При инициализации энкодера мы не знаем в каком положении находится диск. Т.е. мы можем узнать только направление и скорость вращения диска.
Для получения полной информации, а именно — начальное положение диска, направление и скорость вращения используются абсолютные энкодеры.
Абсолютные энкодеры используют диск со сложной системой кодировки положения. Наиболее распространен код Грея — двоичная кодировка с защитой от ошибок.
Я остановил свой выбор на инкрементальном энкодере с контролем направления вращения, т.е. с двумя квадратурными каналами вывода информации. Разрешения в 100 линий на оборот диска мне было за глаза. Поэтому на Алиэкспрессе я нашел энкодеры за разумную цену и с нужными мне характеристиками.
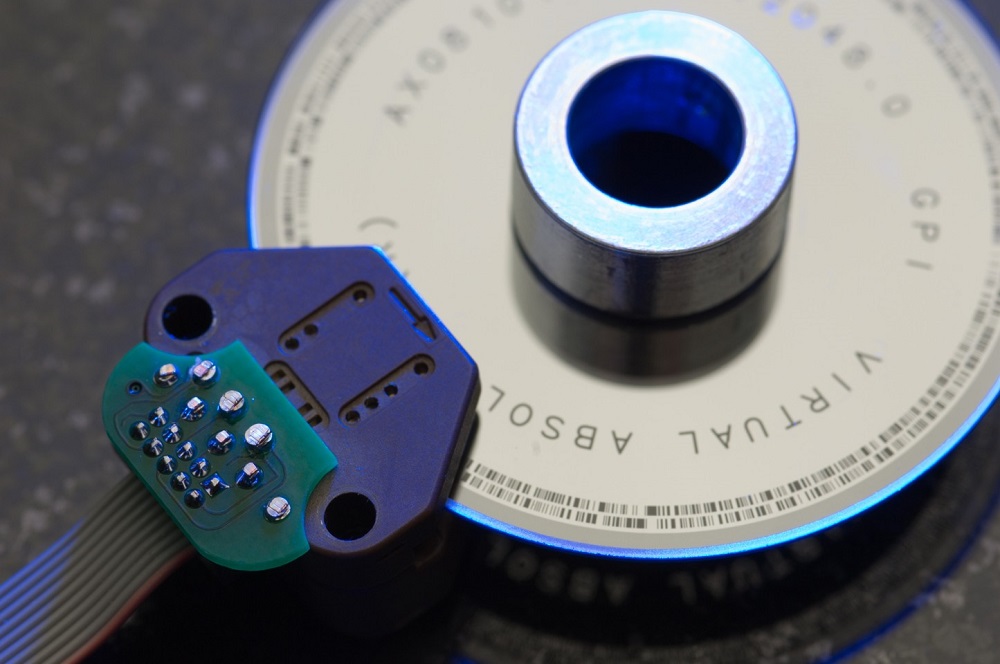
Вот фотка 3-х пришедших мне энкодеров. Дошли они недели за 3.
У энкодеров 4 вывода, Красный — питание 5В, Черный — земля, Цветные — каналы А и В.
Я быстренько выточил втулочку на вал двигателя под крепление диска, ввинтил туда стержень с резьбой.
На 3Д принтере распечатал площадку под крепление датчика энкодера
Собрал все вместе
Подключил сервоконтроллер, и… тут бы был счастливый конец обзору, но нет. Ничего не заработало. Даже близко ничего не заработало.
Подключил осциллограф и понял, что никаких квадратурных сигналов на выходе нет, только шумы, наводки и непонятные выплески. Грешил я на все на свете. И на требовательность к позиционированию, и на засветку, и на наводки электромагнитные. И часами аккуратно возюкал датчик в разных положениях, выключал свет и пытался проделать все тоже самое в темное. «Крокодил не ловится, не растет кокос.» Разумеется я перепробовал все 3 энкодера. Везде тоже самое. И тут меня дернуло поразглядывать датчик в микроскоп.
Грешил я на все на свете. И на требовательность к позиционированию, и на засветку, и на наводки электромагнитные. И часами аккуратно возюкал датчик в разных положениях, выключал свет и пытался проделать все тоже самое в темное. «Крокодил не ловится, не растет кокос.» Разумеется я перепробовал все 3 энкодера. Везде тоже самое. И тут меня дернуло поразглядывать датчик в микроскоп.
То что я увидел повергло меня в изумление. Все 4 сенсора стояли в ряд по радиусу диска, т.е. засвечивались через прорезь диска одновременно. Разумеется ничего не работало. Датчики должны стоять перпендикулярно радиусу диска, и засвечиваться последовательно разными фронтами прорези диска. Я не мог поверить, что это так просто и так глупо. Китайцы поставили датчик с поворотом на 90 градусов. Я спросил на форуме у такого же как я покупателя таких же энкодеров как у него стоит датчик. И у него все было также неправильно и не работало.
Почесав в затылке я решил попробовать это дело исправить. Энкодер разобрался легко, при помощи фена расплавил термоклей и достал внутренности.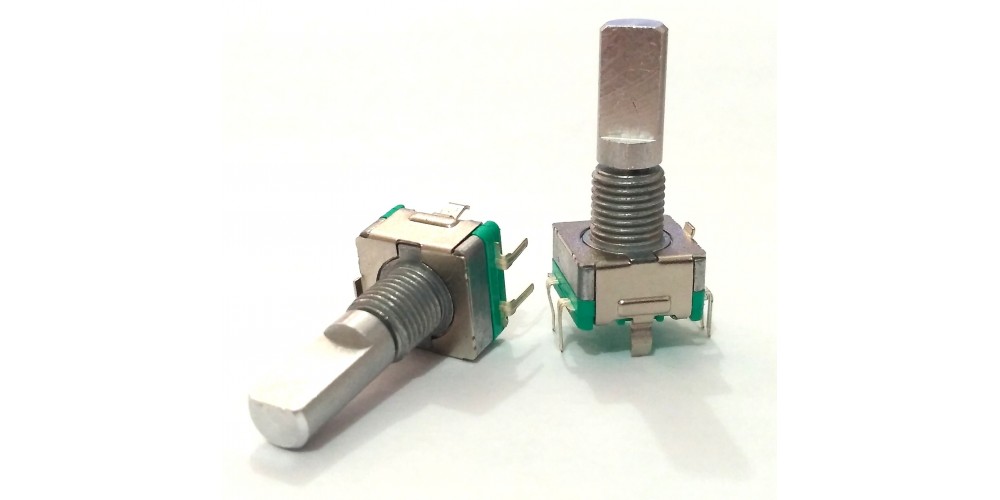
Поднес датчик к диску так чтобы сенсоры был поперек рисок. Конечно датчик корректно не встал, но на осциллографе начал появляться какой-то осмысленный сигнал.
Дальше разрезал корпус энкодера сбоку, наростил проводочками расстояние между светодиодом и матрицей сенсоров и засунул все в корпус по-новому.
На фото видно, что сенсоры стали перпендикулярно радиусу диска.
Собрал, подключил к сервоконтроллеру и… Бинго, все заработало! Мотор встал в режим удержания позиции. Т.е. при попытке проворота вала двигателя, мотор упирается и если его все же провернуть, то возвращается в исходное положение.
Ну а дальше двигатель займет свое место на фрезерном станке, но это уже совсем другая история…:-)
Как резюме. Энкодер из коробки не работает. К покупке не рекомендую. Но в своей ценовой категории, если он был бы исправным, это хорошее бюджетное решение. Либо если переделка изделия в работающее не пугает, то можно брать и переделывать.
У продавца куча положительных отзывов на такой энкодер. Либо это все липа, либо, что вероятнее, брак пошел массово совсем недавно.
Либо это все липа, либо, что вероятнее, брак пошел массово совсем недавно.
Я написал продавцу, он пока шлет мне тонну технических описаний и предлагает попробовать еще, и намекает, что это я не разобрался. Буду на него давить. Пусть хоть часть денег вернет. Я столько времени угрохал из-за их заводского разгильдяйства.
Всем добра и удовольствия от хобби!
#04 Принцип и преимущества оптического энкодера | Учебники | Датчики угла поворота | Продукты
#04
Принцип действия и преимущества оптического энкодера
Основные сведения о энкодере
Это четвертая часть серии, в которой систематизированы и представлены знания, которые мы приобрели. Тем, кто хочет изучать энкодеры, тем, кто не имеет дела с энкодерами, но хочет знать, в чем заключается работа. Мы хотим помочь этим людям.
В этой части мы представим принцип и преимущества оптического энкодера.
Содержание
4-1. Структура оптического энкодера
4-2. Принцип действия оптического энкодера
Принцип действия оптического энкодера
4-3. Преимущества и области применения оптического энкодера
Резюме
- Оптический энкодер улавливает импульсные оптические сигналы, прошедшие через щель, преобразует их в электрические сигналы и выводит.
- Оптический энкодер легче повысить точность и разрешение, чем магнитный энкодер, и его можно использовать в приложениях, где создается сильное магнитное поле.
- Оптический энкодер с отражателем можно легко уменьшить и уменьшить. Кроме того, процесс сборки может быть упрощен, поскольку энкодер изготавливается штабелированием.
4-1. Структура оптического энкодера
Оптический энкодер состоит из светоизлучающего устройства (СИД), фотодатчиков и диска, называемого кодовым колесом, с прорезями (отверстиями) в радиальном направлении и обнаруживает информацию о положении вращения в виде оптического импульсного сигнала. .
Когда кодовое колесо, прикрепленное к вращающемуся валу, такому как двигатель, вращается, генерируется оптический импульс в зависимости от того, проходит ли свет, излучаемый фиксированным светоизлучающим элементом, через прорезь кодового колеса или нет.
Фотодатчик улавливает оптический импульс, преобразует его в электрический сигнал и выдает.
Рисунок 4-1. Схема оптического энкодера
Светоизлучающие устройства (СИД)
Светоизлучающие устройства, используемые в оптических энкодерах, обычно представляют собой недорогие инфракрасные светодиоды, но иногда для подавления рассеяния света используются цветные светодиоды с более короткими длинами волн.
Кроме того, дорогие лазерные диоды используются в приложениях, требующих высокой производительности и высокого разрешения.
Свет, излучаемый светодиодом, представляет собой рассеянный свет с небольшой направленностью, поэтому он делается параллельным с помощью выпуклой линзы.
Кодовое колесо (подвижная прорезь)
Кодовое колесо представляет собой диск с прорезями (отверстиями) для прохождения/блокирования света, излучаемого светодиодом.
Кодовое колесо изготовлено из металла, смолы и стекла. Металл обладает высокой устойчивостью к вибрации, температуре и влажности и используется в промышленной сфере. Смола
Металл обладает высокой устойчивостью к вибрации, температуре и влажности и используется в промышленной сфере. Смола
дешева и подходит для массового производства и используется в потребительских целях.
Стекло используется в приложениях, где требуется высокая точность и высокое разрешение. Кроме того, в месте, обращенном к кодовому колесу, может быть размещена фиксированная щель, чтобы уточнить прохождение/блокирование света, проходящего через кодовое колесо и попадающего в светоприемный элемент.
Фотодатчик
Фотодатчик обычно представляет собой фотодиод или фототранзистор, изготовленный из полупроводникового материала, такого как кремний (Si), германий (Ge) и фосфид индия-галлия (InGaP).
4-2. Принцип работы оптического энкодера
Классификация по конструкции
Оптические энкодеры подразделяются на два типа в зависимости от их конструкции.
Они бывают «пропускающего типа», в которых светоизлучающее устройство (СИД) и фотодатчик расположены между кодовым колесом, и «отражательного типа», в котором светодиод и фотодатчик размещаются на одной стороне, а кодовое колесо отражает свет .
Рисунок 4-2-1. Схема оптического энкодера, пропускающий (слева) и отражающий (справа)
Тип пропускания
Фотодатчик определяет, проходит ли свет, излучаемый светодиодом, через прорезь кодового диска или нет.
Преимущества:
- Простота повышения точности сигнала
- Простота разработки благодаря относительно простому оптическому пути
Отражающий тип
Фотодатчик определяет, отражается ли свет, излучаемый светодиодом, кодовым колесом или нет.
Преимущества:
- Простота миниатюризации и тонкости
- Поскольку он может быть изготовлен методом штабелирования, процесс сборки может быть упрощен.
Классификация по формату выходного электрического сигнала
Оптические энкодеры подразделяются на два типа в зависимости от формата выходного электрического сигнала.
Существует инкрементный метод, который выводит изменение угла (величину перемещения) вращающегося диска, и абсолютный метод, который выводит абсолютный угол вращающегося диска.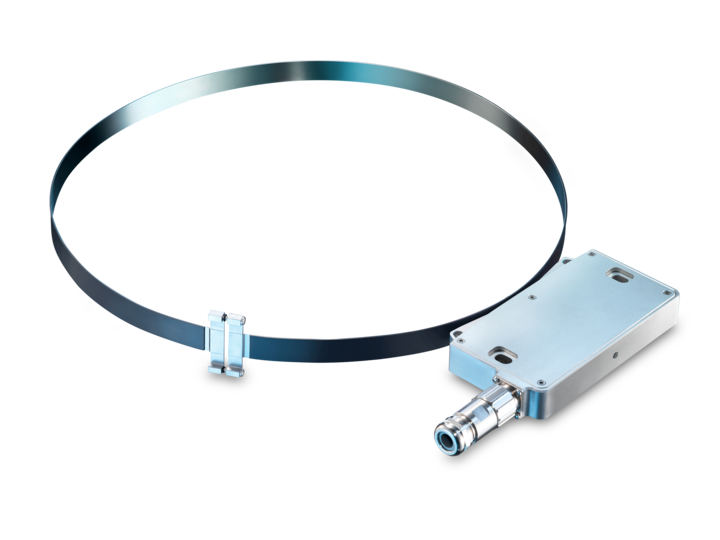
Инкрементный метод и абсолютный метод были подробно объяснены в части 3.
Более высокое разрешение и более высокая точность
Разрешение оптического энкодера в основном определяется количеством щелей в кодовом колесе. Следовательно, необходимо увеличить количество щелей в кодовом колесе для достижения высокого разрешения, но необходимо уменьшить площадь каждой щели, чтобы соответствовать миниатюризации кодера.
В результате для сборки компонентов требуется высокая точность, и где-то достигаются физические ограничения.
Для дальнейшего улучшения разрешения существует метод «электрической интерполяции» фазы A и фазы B выходного сигнала с использованием псевдосинусоидального сигнала вместо импульсного сигнала.
Таким образом, оптический кодировщик может реализовать высокое разрешение и высокую точность за счет оптимизации структуры светодиода, кодового колеса, фотодатчика и т. д. и уменьшения искажения псевдосинусоидальной волны.
Рисунок 4-2-2. Сигнал псевдосинусоидальной волны (вверху), импульсный сигнал (внизу)
Сигнал псевдосинусоидальной волны (вверху), импульсный сигнал (внизу)
4-3. Преимущества и области применения оптического энкодера
Преимущество оптического энкодера в том, что легко повысить точность и разрешение путем изменения формы щели, поскольку он имеет механизм, определяющий, проходит ли свет через щель или нет.
Поэтому он используется для сервоуправления и управления двигателем с полым валом, которые требуют высокой точности.
Кроме того, поскольку на него не влияет окружающее магнитное поле, его можно использовать в приложениях, где создается сильное магнитное поле.
Поэтому он используется в устройствах, в которых используются двигатели большого диаметра.
Сводка
- Оптический энкодер обнаруживает оптические импульсные сигналы, прошедшие через щель, преобразует их в электрические сигналы и выводит.
- Оптический энкодер легче повысить точность и разрешение, чем магнитный энкодер, и его можно использовать в приложениях, где создается сильное магнитное поле.

- Оптический энкодер с отражателем можно легко уменьшить и уменьшить. Кроме того, процесс сборки может быть упрощен, поскольку энкодер изготавливается штабелированием.
Как это было?
В этой части мы представили принцип и преимущества оптического энкодера. Надеюсь, вы понимаете принцип и преимущества, а также приложения, в которых используются оптические энкодеры.
В следующей части мы объясним принцип и преимущества магнитного энкодера.
Базовые знания кодировщика
#04
СВИТОК
Открытые оптические энкодеры
Открытые оптические энкодеры Пропустить навигациюОзнакомьтесь с серией QUANTiC
Инкрементный энкодер QUANTiC™
Теперь доступен с аналоговым выходом
2 7
Создание номера детали
Пошаговое руководство
Типы открытых оптических энкодеров Renishaw
Линейный
Необходима информация о прямолинейном положении — обычно по осям X, Y или Z.
Линейные энкодеры
Поворотные
Информация об угловом положении и управление движением вращающихся элементов.
Датчики вращения
Частичная дуга
Измерение частичной дуги вращения путем наматывания шкалы на барабаны, валы или дуги.
Датчики частичной дуги
Функциональная безопасность
Сертифицированы по ISO 13849, категория 3 PLd, IEC 61508 SIL2, IEC 61800-5-2 SIL2.
Датчики функциональной безопасности
Сверхвысокий вакуум
Для процессов, в которых необходимы системы датчиков, совместимые с вакуумом.
Сверхвысоковакуумные (UHV) энкодеры
Запросите предложение
Свяжитесь с нами, чтобы получить предложениеНайдите ближайший офис Renishaw
Связанные продукты для энкодеров
Инструменты для диагностики энкодеров
Выберите из нашего ассортимента диагностические инструменты для оптимизации настройки и удаленной калибровки ваших систем энкодера.
Инструменты для диагностики энкодера
Шкалы энкодера
Просмотрите наш ассортимент открытых весов для оптических энкодеров.
Шкалы энкодера
Что такое открытый оптический энкодер Renishaw?
Оптический энкодер представляет собой электромеханическое устройство, выдающее электрический сигнал на выходе, пропорциональный линейному смещению линейной направляющей или угловому положению входного вала.
Открытые энкодеры открыты и не имеют внешнего встроенного корпуса. К преимуществам открытых оптических энкодеров относится эффективное устранение люфта, перекручивания вала (кручения) и других погрешностей механического гистерезиса.
Вращающийся открытый оптический энкодер состоит из считывающей головки для измерения положения и точной поворотной шкалы, нанесенной либо на периферию кольца, либо на поверхность диска.
Считывающая головка измеряет положение путем оптического обнаружения регулярно расположенных меток шкалы и выводит эту информацию в виде аналогового или цифрового сигнала.
Затем сигнал преобразуется в показания положения с помощью цифрового считывающего устройства (DRO) или контроллера движения.
Подробнее о том, как работают энкодеры
Исследуйте наши системы Encoder
Абсолютные чтения Encoder
RESOLUTE ™ ADTA-10077575757575.757575757575.757575757575.757575.757575.757575.7575.757575.757575.757575.7575.757575757575757575757575757575.7575757575757575757575757575757575.701557575757575757575757575757575757.
. VIONiC™ATOM™ATOM DX™RG2-RG4
Доверьтесь опыту компании Renishaw в области энкодеров
Качество и поддержка
Все наши оптические энкодеры имеют одобрение CE, соответствуют требованиям RoHS и производятся компанией Renishaw под строгим контролем качества, сертифицированным по ISO 9001:2015. Их также поддерживает действительно отзывчивая глобальная сеть продаж и поддержки.
Исследования и разработки
Являясь ведущим новатором в отрасли, компания Renishaw каждый год реинвестирует около 14 % оборота в проектирование, исследования и разработки. Результатом являются революционные новые решения для наших клиентов, которые демонстрируют нашу приверженность созданию уникальных технологий, выводящих производительность энкодеров на новый уровень.
Результатом являются революционные новые решения для наших клиентов, которые демонстрируют нашу приверженность созданию уникальных технологий, выводящих производительность энкодеров на новый уровень.
Надежность и гарантия
На каждый энкодер Renishaw предоставляется 2-летняя гарантия и наша лучшая в отрасли программа ремонта путем замены, которая предусматривает немедленную замену продукта из местных запасов, чтобы свести время простоя оборудования к абсолютному минимуму.
Применение инноваций
Наше лидерство в области метрологии и наша репутация инженерного мастерства позволили нам занять лидирующие позиции на рынке с момента выпуска наших первых энкодеров в 1989 году.
Оптические энкодеры помогают нашим клиентам реализовать свой потенциал
Ознакомьтесь с нашими практическими примерами
Ресурсы по оптическим энкодерам
Загрузки
Доступ ко всей технической литературе, чертежам, сертификатам и программному обеспечению по оптическим энкодерам.
Центр загрузки
Практические примеры и рекомендации по применению
Узнайте, как другие доверяют оптическим энкодерам Renishaw.
Тематические исследования и рекомендации по применению
Знания и поддержка
Получите доступ к нашим последним видеороликам и ключевой документации, а также узнайте больше о нашей глобальной поддержке, контроле качества, соблюдении нормативных требований и гарантиях.
Знания и поддержка
Устаревшие продукты
Альтернативные решения и поддержка наших унаследованных кодировщиков.
Устаревшие продукты
Открытые оптические энкодеры
- EVOLUTE™ абсолютный, линейный
- RESOLUTE™ абсолютный, линейный и круговой
- QUANTiC™ цифровой, линейный и вращательный инкрементный0315
- TONiC™ инкрементный, сверхкомпактный, линейный и поворотный
- VIONiC™ инкрементальный, цифровой сверхкомпактный, линейный и поворотный
- ATOM DX™ инкрементный, цифровой миниатюрный, линейный и поворотный
- ATOM инкрементальный, миниатюрный миниатюрные, линейные и поворотные
Энкодеры
- Открытые оптические энкодеры
- Закрытые оптические энкодеры
- Магнитные энкодеры
- Интерферометрические лазерные энкодеры
Оптический энкодер | Типы, структура, применение и многое другое Оптический кодировщик
| Типы, структура, применение и многое другое | Корпорация МЕЛТЕК org/Breadcrumb»> Дом
org/Breadcrumb»> Дом - Оптический энкодер | Типы, структура, применение и многое другое
Содержание
- Что такое оптический энкодер?
- Отличие от магнитных энкодеров
- Типы оптических энкодеров
- 1) Измеряемое направление движения
- 2) Способ вывода сигнала
- 3) Оптический путь
- Структура оптического энкодера
- Источник света
- Фотодетекторы
- Шкала энкодера
0 9 Где используются оптические энкодеры 90? - Соединения манипулятора робота
- Двери лифта
- Принтеры
- Станки
- Как работает оптический энкодер?
- Как выбрать оптический энкодер
- i) Модель (поворотный или линейный?)
- ii) Метод вывода (инкрементальный или абсолютный?)
- iii) Разрешение и технические характеристики (есть ли соответствующий размер и разрешение?)
- Наша специальность
Что такое оптический энкодер?
Этот тип энкодера использует оптический датчик для определения того, горит свет или нет. Этот энкодер отличается своей способностью работать с высокой точностью и сильными магнитными полями.
Этот энкодер отличается своей способностью работать с высокой точностью и сильными магнитными полями.
Оптические энкодеры включают типы отражающих, пропускающих и дифракционных решеток. Поскольку в качестве вращающихся дисков используются ультратонкие пластины из нержавеющей стали или стеклянные диски, могут возникнуть проблемы с механической вибрацией и ударами.
Рис. Оптический энкодер
Оптические энкодеры широко используются в оргтехнике, станках и промышленных роботах в качестве высокоточных датчиков контроля положения. В последние годы отражающие энкодеры стали использоваться в ультракомпактных приводах и кооперативных роботах, требующих небольшого пространства.
Отличие от магнитных энкодеров
Существует тип энкодера, называемый «магнитным энкодером», который является аналогом оптического энкодера.
Магнитный энкодер — это тип энкодера, который использует магнитный датчик для обнаружения изменений в магнитном поле. Они просты, компактны и очень прочны.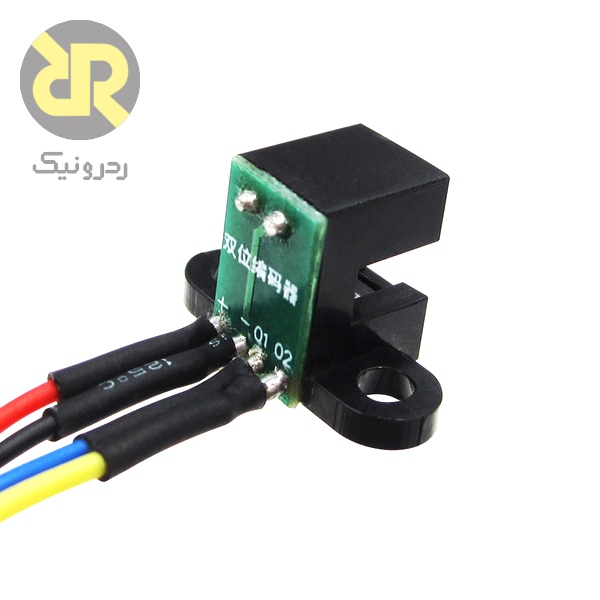
Магнитный тип сочетает в себе магнитный барабан и элемент магнитоэлектрического преобразования, такой как магниторезистивный элемент, и имеет структуру, которая может легко увеличить механическую прочность.
С другой стороны, его недостатком является то, что его разрешение и точность ниже, чем у оптических энкодеров. Это связано с тем, что разрешение магнитных энкодеров зависит от производительности схемы обработки сигнала, поскольку разрешение определяется пропускной способностью обработки электрического сигнала.
| Характеристика\Тип | Оптические энкодеры | Магнитные энкодеры |
|---|---|---|
| Высокое разрешение | ✓ | |
| Высокая точность | ✓ | |
| Устойчивость к воздействию окружающей среды | ✓ | |
| Маленький размер и легкий вес | ✓ | |
| Низкая цена | ✓ |
Вот наши продукты
Типы оптических энкодеров
Оптические энкодеры классифицируются по (1) направлению измеряемого движения, (2) методу вывода сигнала и (3) оптическому пути.
1) Измеряемое направление движения
Оптические линейные энкодеры
Этот тип энкодера излучает свет на щелевую структуру, которая движется вдоль линейной оси, регистрирует свет, который проходит (или отражается) через схему с датчика и выводит его как информацию о положении.
Оптические поворотные энкодеры
Этот тип энкодера излучает свет на вращающуюся щелевую структуру, обнаруживает свет, который проходит (или отражается) датчиком, и выводит его как информацию о положении.
Этот тип энкодера часто используется в качестве датчика в робототехнике. Он читает диск с равномерно расположенными делениями. Используется кодовое колесо с закругленной линейной шкалой, которое является компонентом линейного энкодера, и технология, используемая для изготовления обоих, аналогична.
Они используются в самых разных приложениях, от недорогих, встроенных в принтеры, до высокоточных приложений управления и измерений.
2) Способ вывода сигнала
Инкрементный тип
Угол поворота измеряется путем преобразования количества обнаруженных импульсов. Скорость вращения получается из интервала импульсов или количества импульсов в единицу времени.
Скорость вращения получается из интервала импульсов или количества импульсов в единицу времени.
Рис. Диск абсолютного энкодера
В инкрементном типе известно только изменение вращения диска, а количество градусов отклонения выходного сигнала датчика от опорного положения подсчитывается и сохраняется в счетчике или памяти .
Абсолютный тип
Энкодеры этого типа выводят абсолютное значение угла поворота, а механическое положение определяется сразу после включения питания.
Рис. Диск инкрементального энкодера
В то время как инкрементальный тип выводит только инкрементальные значения и требует выравнивания исходной точки, абсолютный тип выводит однозначное соответствие между углом диска шаблона шкалы и выходным кодом, поэтому абсолютный угол всегда можно узнать, независимо от состояния питания.
Таким образом, абсолютный тип имеет то преимущество, что устраняет необходимость выравнивания исходной точки, но схема масштабирования более сложная, а разрешение, как правило, ниже, чем у инкрементного типа.
| Характеристика\Тип | Абсолют | Инкрементальный |
|---|---|---|
| Высокое разрешение | ✓ | |
| Возврат в исходное положение не требуется | ✓ | |
| Большая подача | ✓ | |
| Помехоустойчивость | ✓ | |
| Низкая цена | ✓ |
3) Оптический путь
Оптические энкодеры можно разделить на «тип передачи» и «тип отражения» в соответствии с оптическим путем, который проходит светоприемный элемент внутри для обнаружения света.
Пропускающий тип
Пропускной тип относится к методу, при котором источник света и светоприемный элемент помещаются лицом к лицу в пространстве, и свет перехватывается или передается между ними.
Преимущества передающего энкодера заключаются в следующем.
- Простота повышения точности сигнала по сравнению с энкодером на отражение
- Легко повысить устойчивость к загрязнению
- Относительно простая конструкция
С другой стороны, у него также есть следующие недостатки:
- Ограниченное физическое движение
- Ограниченная гибкость конструкции
Отражающий тип
С другой стороны, «Отражающий тип» относится к методу, при котором источник света и светоприемный элемент размещаются в одной плоскости, а компонент переключает отражение/неотражение света размещается над источником света и светоприемным элементом.
Преимущества отражательного энкодера:
- Простота изготовления, тоньше и меньше
- Простой процесс сборки
Однако он имеет следующие недостатки
- Низкая стойкость к загрязнению
- Низкая точность сигнала
| Характеристика\Тип | Передающий | Светоотражатель |
|---|---|---|
| Высокая точность сигнала | ✓ | |
| Стойкость к загрязнению | ✓ | |
| Простая конструкция | ✓ | |
| Миниатюризация | ✓ | |
| Время сборки | ✓ |
Вот наши продукты
Структура оптического энкодера
Оптический энкодер в основном состоит из следующих трех частей.
Источник света
В большинстве оптических энкодеров в качестве источника света используются инфракрасные светодиоды. Лазерные диоды также могут использоваться в продуктах с высоким разрешением.
Фотодетекторы
В качестве светоприемного элемента обычно используется фотодиод или подобное устройство. Светоприемным элементом является диод, который передает входной сигнал/ток на выход через свет.
Шкала энкодера
Шкалы энкодера — это компоненты, встроенные в энкодеры, которые переключают передачу/блокировку или отражение/неотражение света (например, светодиоды). На шкале выгравированы прорези (чешуйки) через равные промежутки, и свет, проходящий через прорези или блокирующий их, называется типом пропускания, а свет, отражающий или неотражающий, называется типом отражения.
Весы энкодера являются незаменимыми компонентами технологии управления движением и используются во многих областях, включая промышленные роботы, сервоприводы позиционирования, автоматизацию производственных предприятий и автомобильную промышленность.
Вот наши продукты
Где используются оптические энкодеры?
Соединения манипулятора робота
Существует множество типов механических датчиков положения/позы, но, как правило, производители робототехники используют шарнирные манипуляторы с энкодерами вращения, расположенными на шарнирах.
Необходимо использовать тип с 3 степенями свободы, который измеряет только положение, или тип с 6 степенями свободы, который измеряет и положение, и осанку, в зависимости от количества измеряемых суставов.
В некоторых случаях имеется также устройство захвата движения с энкодерами, расположенными в положениях, соответствующих суставам человеческого тела, для измерения его движения.
Двери лифта
Имеется двигатель, управляющий открытием и закрытием двери лифта, и требуется низкий уровень шума из-за непосредственной близости пассажира.
В двигателе используется энкодер, который контролирует скорость движения двери. Это также помогает определить положение дверей.
Это также помогает определить положение дверей.
Принтеры
Кодировщики используются для управления работой чернильных головок струйных принтеров.
Энкодер посылает импульсные сигналы на промышленный струйный принтер при вращении присоединенного шкива. Струйный принтер использует интервал между импульсными сигналами для распознавания скорости объекта.
Использование энкодера в принтере позволяет печатать красиво и точно. Энкодеры также используются для управления вращающимся барабаном, который перемещает бумагу.
Станки
Энкодеры используются для управления горизонтальным перемещением стола, на котором размещается заготовка.
Например, фрезерные станки с ЧПУ и электроэрозионные станки требуют чистовой точности в диапазоне от нескольких микрон до нескольких десятков микрон. Для этого им требуются энкодеры с разрешением примерно в 10 раз выше требуемой точности чистовой обработки.
Вот наши продукты
Как работает оптический энкодер?
В этом разделе мы объясним принцип работы оптического энкодера на примере оптического передающего поворотного энкодера.
Этот тип энкодера в основном состоит из
- Источника света (со стороны инфракрасного светодиода)
- Фотодетектор (со стороны фотоИС)
- Диск энкодера с выгравированными полосами, которые служат шкалами
Диск оптического энкодера, который используется для измерения числа оборотов двигателя, устанавливается между U-образными деталями, показанными на рисунке. Эта U-образная деталь называется «фотопрерыватель».
Фотопрерыватель содержит инфракрасный светодиод и фотомикросхему, расположенную между дисками. При облучении инфракрасным светом эта механическая часть измеряет, сколько раз свет светодиода проходит через отверстие в диске.
Число преобразуется в угол для определения угла поворота и скорости диска.
Как выбрать оптический энкодер
i) Модель (поворотный или линейный?)
Первым шагом при выборе энкодера является решение, использовать ли поворотный или линейный энкодер.
Вы можете выбрать энкодер в зависимости от того, будет ли конечное движение системы привода линейным или вращательным.
ii) Метод вывода (инкрементный или абсолютный?)
Абсолютный тип не требует возврата в исходное положение, поскольку он предоставляет информацию об абсолютном положении, даже если питание быть дорогостоящим.
С другой стороны, инкрементный тип имеет простую структуру и относительно недорог. Инкрементный тип также подходит для измерения скорости и направления движения, а не абсолютных значений.
iii) Разрешение и технические характеристики (Есть ли соответствующий размер и разрешение?)
Обычно выбирают разрешение, обеспечивающее от 1/2 до 1/4 общей точности механической системы.
Размеры должны определяться в соответствии с системой, в которую будет встроен энкодер. Это означает, что необходимо выбрать размер диаметра корпуса, длину, диаметр выходного вала (сплошной или полый вал) и т. д.
Если вы не можете найти готовый кодировщик с подходящим разрешением и размером, рассмотрите возможность изготовления кодировщика на заказ.
Наша специализация
Мы производим диски оптических энкодеров и полоски оптических линейных энкодеров , которые необходимы для технологии управления движением и в настоящее время используются во многих приложениях, как указано ниже.