Как подключить двигатель к Arduino. Какие виды двигателей можно использовать с Arduino. Как управлять скоростью и направлением вращения двигателя. Какие компоненты нужны для подключения двигателя к Arduino. Как защитить Arduino при работе с двигателями.
Виды двигателей, совместимых с Arduino
Arduino позволяет подключать и управлять различными типами электродвигателей. Основные виды двигателей, которые можно использовать:
- Коллекторные (щеточные) DC-двигатели
- Бесколлекторные (бесщеточные) BLDC-двигатели
- Шаговые двигатели
- Серводвигатели
- Вибромоторы
- Линейные актуаторы
Выбор конкретного типа двигателя зависит от требований проекта — необходимой мощности, точности, скорости вращения и других параметров.
Схемы подключения двигателей к Arduino
Существует несколько основных способов подключения двигателей к Arduino:
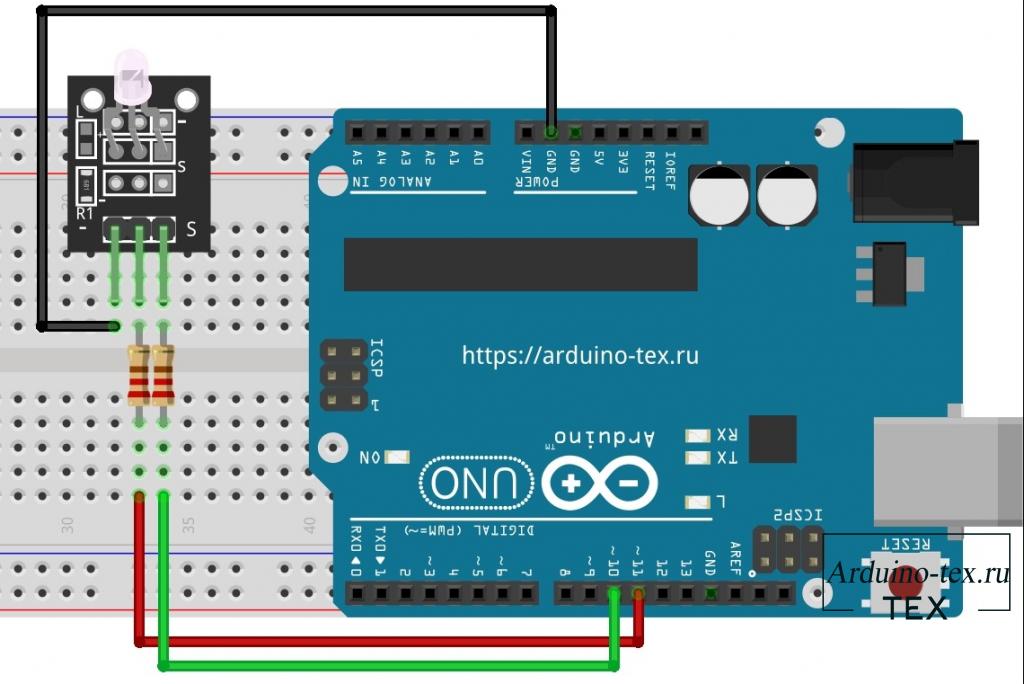
1. Прямое подключение через транзистор
Самый простой способ для маломощных двигателей. Схема включает:
- Транзистор (например, TIP120)
- Защитный диод
- Резистор на базу транзистора
Плюсы: простота. Минусы: только управление скоростью в одном направлении.
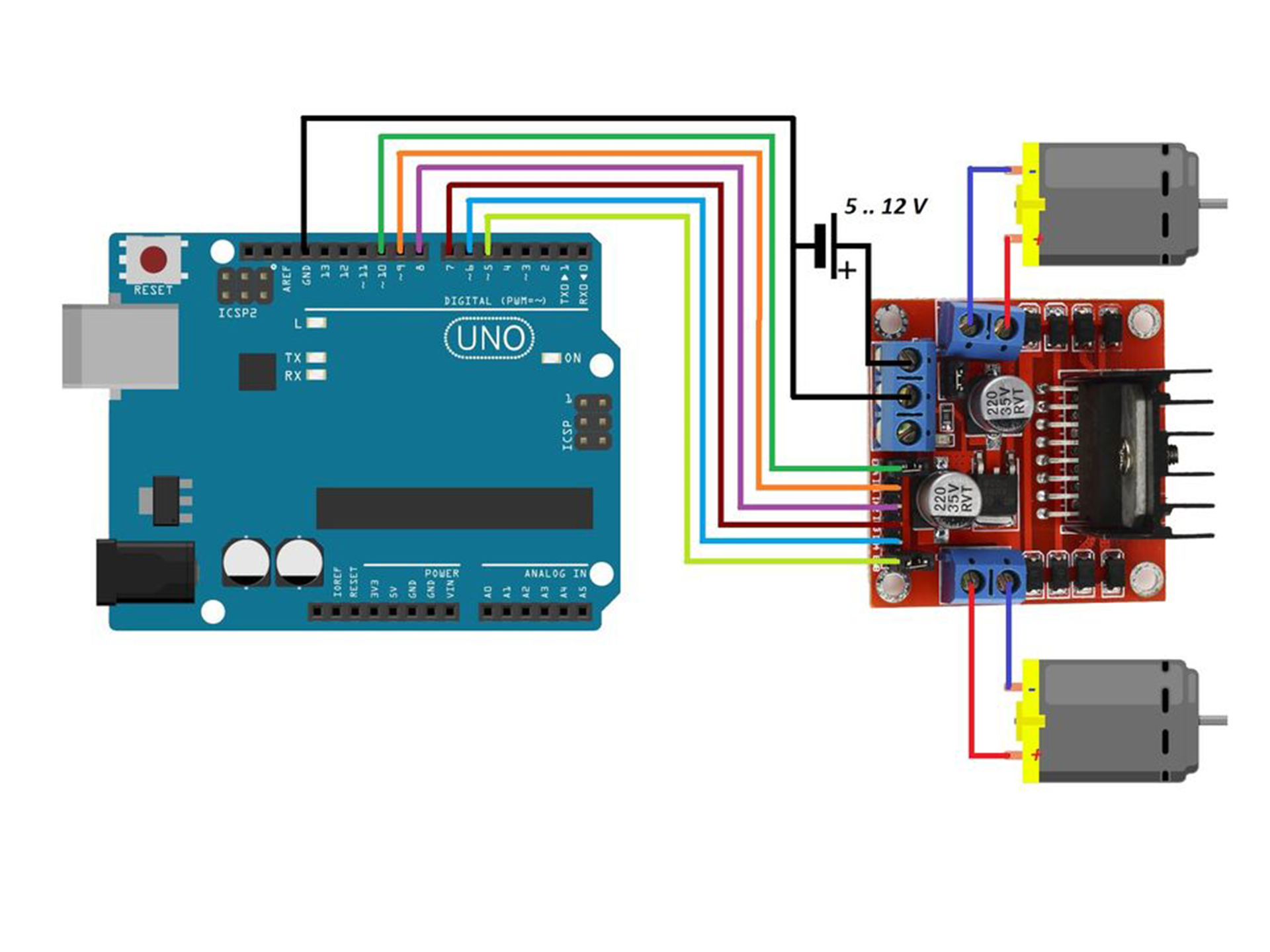
2. Подключение через H-мост
Позволяет управлять скоростью и направлением вращения. Варианты реализации:
- На дискретных транзисторах
- На микросхеме (L293D, L298N)
- Готовый модуль драйвера
Плюсы: полный контроль двигателя. Минусы: сложнее в реализации.
3. Специализированные драйверы двигателей
Для мощных двигателей и особых задач используются специальные драйверы, например:
- DRV8825 для шаговых двигателей
- BTS7960 для мощных DC моторов
Плюсы: оптимальное управление конкретным типом двигателя. Минусы: меньшая универсальность.
Защита Arduino при работе с двигателями
При подключении двигателей к Arduino необходимо обеспечить защиту платы от возможных проблем:
Защита от обратного выброса ЭДС
Для этого используются защитные диоды, подключенные параллельно обмоткам двигателя. Они предотвращают попадание высоковольтных выбросов на выводы Arduino.
Развязка по питанию
Рекомендуется использовать отдельные источники питания для Arduino и двигателей. Это защищает микроконтроллер от помех по цепям питания.
Оптоизоляция сигналов управления
Применение оптопар позволяет полностью изолировать цепи управления Arduino от силовых цепей двигателей.
Программное управление двигателями
Для управления двигателями с помощью Arduino используются следующие программные методы:
Управление скоростью
Скорость вращения регулируется с помощью ШИМ (PWM). Arduino имеет аппаратную поддержку ШИМ на выводах, помеченных символом «~». Для управления используются функции:
- analogWrite() — установка скважности ШИМ
- digitalWrite() — включение/выключение двигателя
Управление направлением
- digitalWrite(pin1, HIGH);
- digitalWrite(pin2, LOW);
Смена состояний этих выводов приводит к реверсу двигателя.
Специальные библиотеки
Для удобства управления различными типами двигателей разработаны специализированные библиотеки:
- Stepper — для шаговых двигателей
- Servo — для сервоприводов
- AccelStepper — продвинутое управление шаговыми двигателями
Типичные ошибки при подключении двигателей
При работе с двигателями и Arduino новички часто допускают следующие ошибки:
Прямое подключение к выводам Arduino
Нельзя подключать двигатель напрямую к выводам Arduino. Это приведет к выходу платы из строя из-за превышения допустимого тока.
Игнорирование защитных элементов
Отсутствие защитных диодов и конденсаторов может вызвать сбои в работе Arduino из-за помех и выбросов напряжения от двигателя.
Неправильный выбор источника питания
Использование маломощного источника питания приводит к нестабильной работе системы, особенно при старте двигателя.
Практические советы по работе с двигателями и Arduino
Для успешной реализации проектов с использованием двигателей и Arduino рекомендуется:
Тщательно рассчитывать мощность
Выбирайте двигатель с запасом по мощности. Учитывайте пусковые токи, которые могут в несколько раз превышать номинальные.
Использовать готовые модули драйверов
Для начинающих удобнее применять готовые модули управления двигателями. Они содержат все необходимые защитные элементы.
Применять плавный старт
Программно реализуйте плавное увеличение скорости при запуске двигателя. Это снизит нагрузку на механику и источник питания.
Перспективные направления использования Arduino и двигателей
Комбинация Arduino и различных двигателей открывает широкие возможности для создания интересных проектов:
Робототехника
Arduino отлично подходит для управления двигателями в мобильных роботах, манипуляторах и других робототехнических системах.
Умный дом
Автоматизация жалюзи, дверей, систем вентиляции с помощью Arduino и двигателей позволяет создавать удобные системы «умного дома».
3D-печать
Arduino часто используется в качестве контроллера 3D-принтеров для управления шаговыми двигателями осей и экструдера.
Таким образом, грамотное применение Arduino для управления двигателями открывает широкие возможности для творчества и создания полезных устройств в различных областях.
Как подключить электродвигатель к Arduino
Существует множество способов, чтобы подключить малые электродвигатели к Arduino. И самым популярным, а также самым простым из них является подключение двигателя через мост типа H либо через транзисторы. Подключая электродвигатель к платформе Arduino, следует помнить о том, что подключение не должно осуществляться непосредственным способом, поскольку это может привести к повреждению программной платформы.
Зачем электродвигатели подключают к Arduino
Внедрение электродвигателей в создаваемые контуры и управление при помощи Arduino открывает много разнообразных возможностей. Основной целью подключения двигателей является возможность запуска в движение элементов создаваемых систем, создание транспортных средств и даже роботов. Благодаря Arduino, возможно управление как направлением вращения вала двигателя, так и скоростью вращения.
Подключение двигателя к Arduino должно осуществляться опосредствованно
Непосредственное подключение программной платформы не только грозит перегоранием выходного порта Arduino, но также ограничивает возможность управления, созданной таким образом системой, до минимума.
Arduino через каждый выходной порт может подавать ток силой около 20 мA, а каждый, даже самый маленький электродвигатель, доступный на рынке, для правильного функционирования требует от десятикратно до тысячекратно большего потребления. Поэтому необходимо подключение электродвигателя к Arduino опосредствованным способом, через соответствующий контроллер, который урегулирует силу подаваемого тока.
Какие двигатели можно подключить к Arduino и на что следует обращать внимание в процессе их выбора
Программная платформа Arduino обеспечивает включение всех низкоамперных электродвигателей, представленных на рынке. К Arduino можно подключить:
- бесщёточные двигатели BLDC с коммутатором,
- щёточные двигатели DC, которые являются самыми простыми электродвигателями с питанием током DC,
- вибрационные двигатели, которые посредством движения вала генерируют вибрацию,
- шаговые двигатели, обеспечивающие высокую точность управления посредством импульсного движения вала,
- туннельные приводы EDF, состоящие из ротора и двигателя с корпусом,
- линейные серводвигатели, обеспечивающие линейное движение,
- сервомеханизмы.

Параметры, на которые следует обратить внимание при выборе электродвигателя для Arduino, зависят от типа двигателя.
Несмотря на это, среди наиболее существенных из них следует указать:
- сила потребляемого тока [A]: параметр характеризует силу тока, который требуется для правильного запуска двигателя;
- номинальное напряжение [В]: это значение напряжения, на котором будет функционировать система; стандартно системы с Arduino работают на напряжении 12В;
- крутящий момент [Нм]: ключевой параметр электродвигателя (и не только), определяющий его мощность; чем больший крутящий момент генерирует двигатель, тем он мощнее;
- скорость вращения [об./мин]: параметр, определяющий скорость вращения вала двигателя,
- масса и габариты [г и мм]: эти параметры являются существенными особенно при создании лёгких систем, в которых принимаются во внимание размеры двигателя,
- разрешающая способность [количество шагов]: этот параметр касается исключительно шаговых двигателей и определяет точность, с которой может двигаться вал шагового двигателя,
- линейная скорость [мм/с]: этот параметр касается исключительно линейных двигателей и характеризует скорость, с которой двигатель может выдвигать вал в линейном направлении.
Как подключить электродвигатель к Arduino
Зная виды двигателей, которые можно подключить к Arduino, и параметры, на которые следует обратить внимание во время их подбора, мы можем приступить к работам по подключению. Легче всего подключить стандартные щёточные двигатели DC, вибрационные двигатели и сервомеханизмы. Несколько сложнее подключаются линейные серводвигатели, шаговые двигатели и насосы.
Щёточные двигатели DC и вибрационные двигатели являются наиболее простыми, они чаще всего бывают представлены в системах и одновременно являются самыми лёгкими в подключении электродвигателями. Стандартно к программной платформе подключаются двигатели с силой тока 1-5A, работающие на напряжении 5-9В. Для более мощных двигателей с большими параметрами применяются специальные контроллеры.
Щёточные двигатели DC и вибрационные двигатели можно подключить при помощи системы с транзистором либо через мост типа H. Первый метод позволяет осуществлять управление только скоростью вращения вала двигателя, а метод подключения через мост обеспечивает управление как скоростью, так и направлением вращения вала. Поэтому также следует подобрать соответствующий метод подключения согласно собственным потребностям и целям.
Поэтому также следует подобрать соответствующий метод подключения согласно собственным потребностям и целям.
Подключение щёточного двигателя DC и вибрационного двигателя через транзистор
Подключение щёточного двигателя DC и вибрационного двигателя при помощи транзистора является очень простым и требует только трёх компонентов: ограничивающего резистора, выпрямительного диода и транзистора. В системе можно использовать, например: выпрямительный диод 1N4148 или 1N4007, транзистор 2N2222 и ограничивающий резистор с сопротивлением 10 кОм. Работы по подключению следует начать с выбора контакта Arduino с соответствующим выходным напряжением.
Контакт Arduino подсоединяем на контактной плате к резистору и в самом конце — к базе транзистора. Эмиттер транзистора мы заземляем, а его коллектор подключаем к двигателю через параллельно подключённый выпрямительный диод. С другой стороны двигатель следует подключить к питанию. Резистор в схеме ограничивает силу тока, который поступает к транзистору, а выпрямительный диод ограничивает риск возникновения обратных токов и выбросов (скачков напряжения), которые имеют место при включении системы.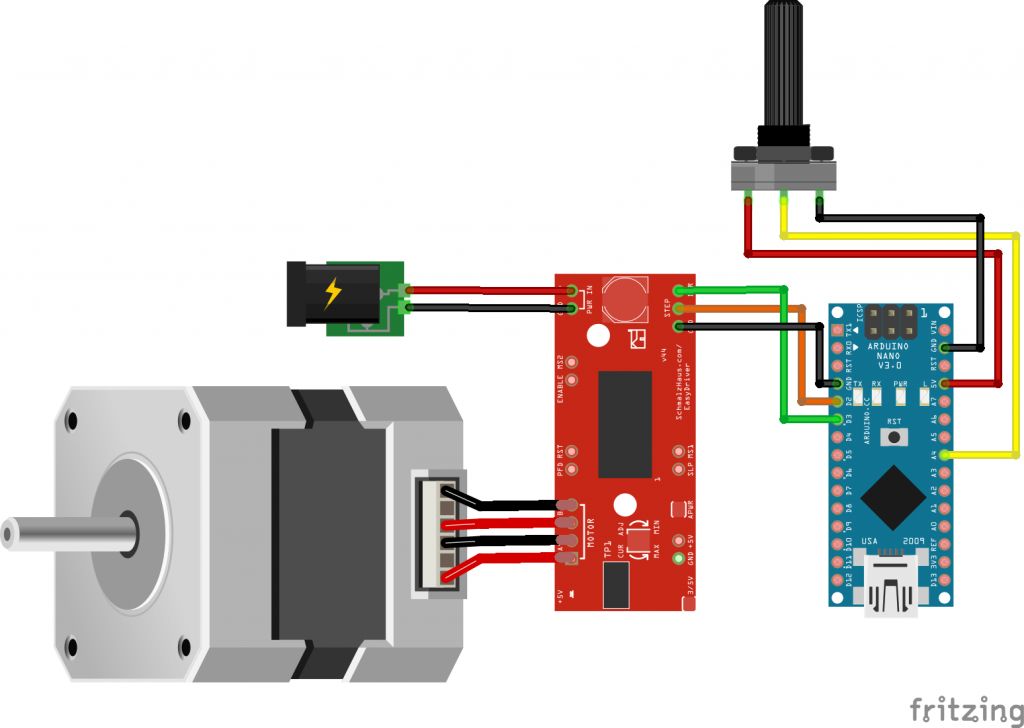 Обратные токи и пики могли бы привести к повреждению программной платформы.
Обратные токи и пики могли бы привести к повреждению программной платформы.
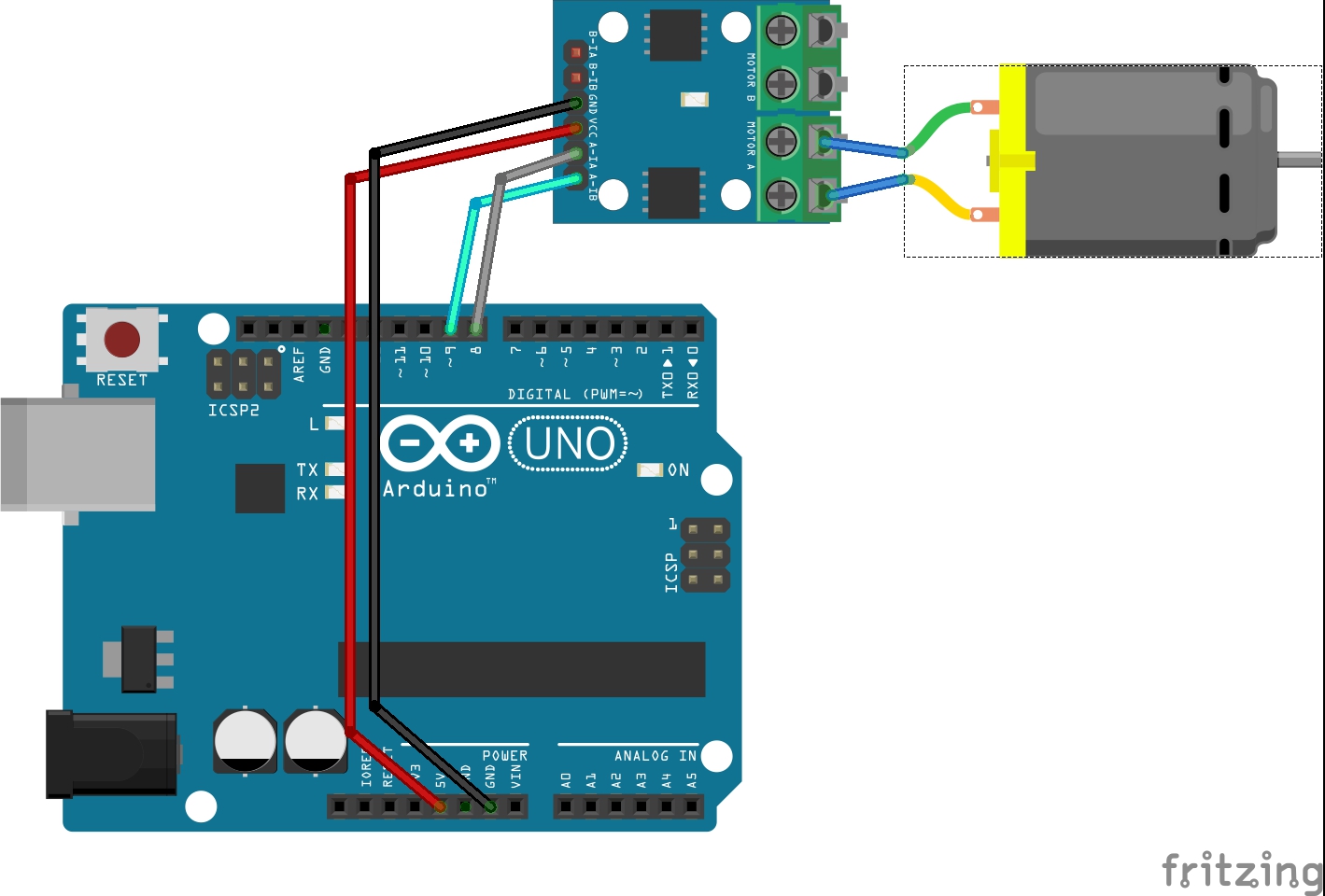
Подключение через мост типа H
Этот способ подключения гарантирует возможность управления не только скоростью, но и направлением вращения вала двигателя. Насколько в случае вибрационных двигателей управление направлением вращения их вала обычно является необоснованным (поскольку они будут генерировать вибрацию вне зависимости от направления вращения вала), настолько управление валом щёточного двигателя DC обычно является ключевой функциональностью системы.
Более того, через мост типа H можно также подключить линейный серводвигатель, если его конструкция основывается на двигателе DC. Мосты типа H можно самостоятельно построить из нескольких транзисторов либо приобрести готовые системы. Их основным заданием является приём сигнала, который посылается Arduino, и трансформация его параметров на выходе моста. Если мы хотим подключить щёточные двигатели DC, вибрационные либо линейные двигатели, необходимо оснастить его ограничивающим резистором (например, с сопротивлением 10 кОм), переключателем и готовой системой моста типа H (например, SN754410, L29NE или L293D).
Мост типа H следует подобрать к системе в плане интенсивности потребляемого двигателем тока во время его максимальной нагрузки – этот параметр носит название токовой эффективности моста. Каждый мост типа H может характеризоваться несколько отличным строением и выводом контактов, поэтому перед тем, как приступить к работам по подключению, следует верифицировать схему вывода контактов в техническом описании моста. Чтобы выяснить способ подключения электродвигателя к Arduino, мы используем мост L293D. Мост L293D оснащен следующими контактами:
- контакт 1: отвечает за управление скоростью двигателя,
- контакты 2 и 7: отвечают за направление вращения вала двигателя,
- контакт 8: питание VC до 36 В,
- контакт 9: может управлять скоростью второго подключённого двигателя,
- контакты 10 и 15: могут управлять направлением вращения вала второго подключённого двигателя,
- контакт 16: питание VCC до 5 В,
- контакты: 4, 5, 12 и 13: заземляемые (подключаемые к земле (GND)).
Первым шагом подключения является размещение моста типа H на контактной плате. После этого следует подключить массу моста к питанию, а затем подключить питание двигателя (или двигателей). Предпоследним этапом работ по подключению является электропитание логической системы управления мостом, последним этапом — подключение контактов, отвечающих за управление работой двигателя (либо двигателей).
Перед началом подключения следует помнить о том, что система моста типа H с электрическим двигателем может быть запитана от одного либо двух напряжений. Если мы запитаем её от одного напряжения, необходимо будет использование источника питания, имеющего соответствующую хорошую фильтрацию, которая ограничит риск возникновения помех.
Лучшим, более популярным и безопасным решением является питание системы от двух источников. Тогда работа двигателя будет запитана от моста, а логическая часть моста (управляющая рабой двигателя) будет запитана от другого независимого источника. Поэтому 5-вольтный контакт Arduino стоит подключить к логичной части моста, а остальное питание к контактам моста, которые отвечают за управление двигателем.
Поэтому 5-вольтный контакт Arduino стоит подключить к логичной части моста, а остальное питание к контактам моста, которые отвечают за управление двигателем.
Подключение сервомеханизмов
Подключение сервомеханизмов является чрезвычайно простым, поскольку их выходы всегда одинаковы. Подключение сервомеханизма к Arduino следует начать с подключения массы питания двигателя и питания системы (обычно это два 5-вольтных источника питания).
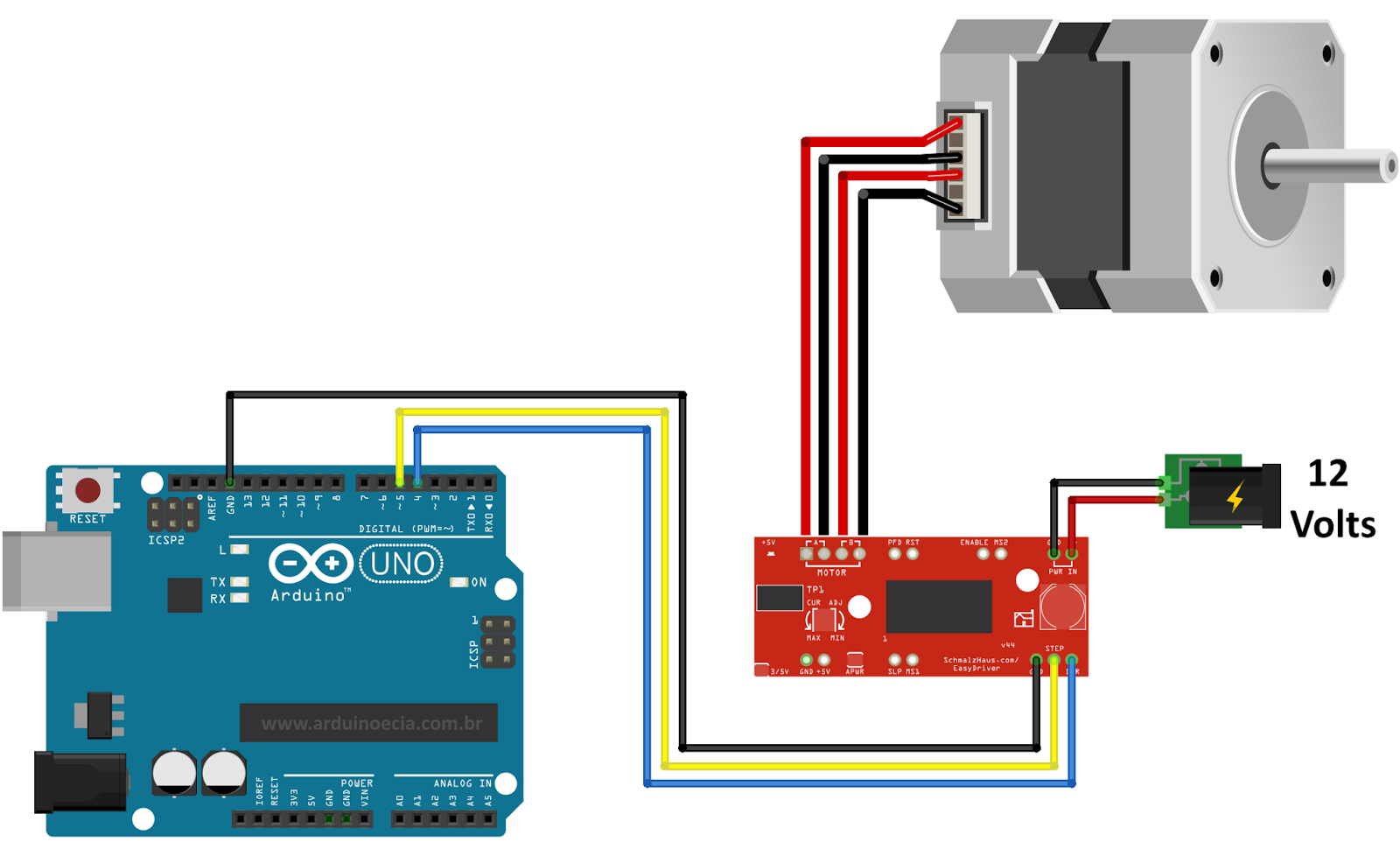
Следующим шагом является подключение выхода PWM Arduino (обозначенного знаком «~») к контакту, который управляет сервомеханизмом. После проведения работ по подключению, следует только записать соответствующую библиотеку. Подключение шаговых двигателей через выделенный контроллер Шаговые двигатели подключаются к Arduino опосредствованно через специальные контроллеры. Эти элементы следует подобрать друг к другу с учётом максимальной интенсивности тока и номинального напряжения, а сам контроллер должен соответствовать как напряжению питания двигателя, так и напряжению питания системы.
Токовая эффективность контроллера должна быть выше, чем максимальная интенсивность тока, потребляемого двигателем. Для потребностей текста следует исходить из того, что необходимо подключить к Arduino шаговый двигатель с напряжением 12В. К нему подходит, например, контроллер A4988.
Сначала мы устанавливаем контроллер на контактной плате, после чего контакты GND и VDD подключаем к питанию контроллера (3-5,5В). Контакты GMD и VMOT подключаются к питанию двигателя, а контакт SLP — к RST. Контакты 1A, 2A, 1B и 2B подключаются к двигателю.
От вида шагового двигателя (того, является ли он биполярным или униполярным) зависит способ подключения контактов 1A, 2A, 1B и 2B. В биполярных двигателях контакт 1A подключается к чёрному кабелю двигателя, контакт 2A — к красному кабелю, контакт 1B — к зелёному кабелю, а контакт 2B — к голубому кабелю. Униполярные двигатели имеют шесть проводов, но жёлтый и белый кабель можно не подключать.
Правильное подключение шагового двигателя к Arduino приводит к тому, что для высокого положения вал двигателя вращается вправо, а для низкого положения — влево.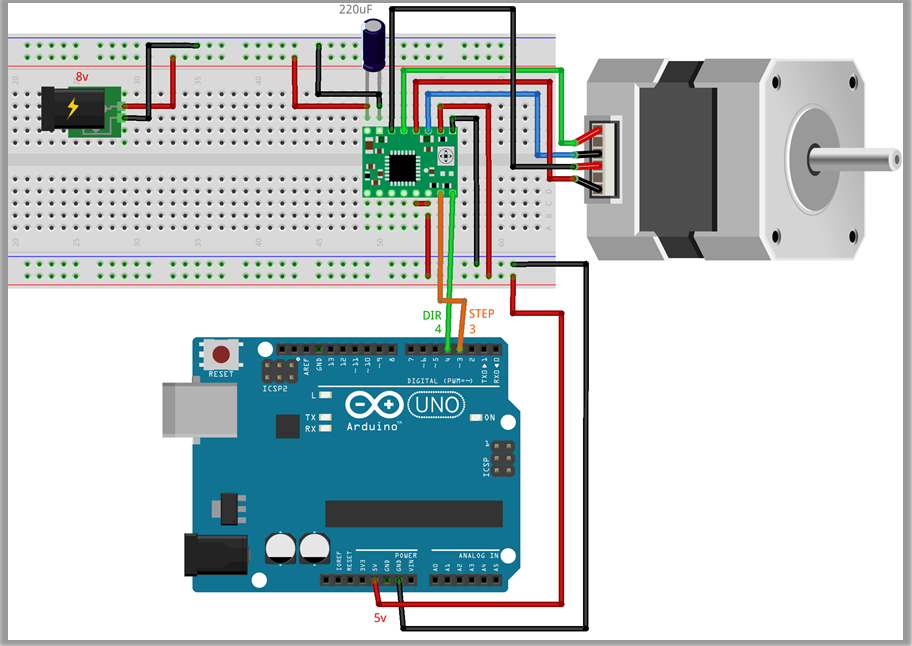 Для нарастающего фронта вал двигателя делает один шаг, а его направление зависит от подключения контакта DIR.
Для нарастающего фронта вал двигателя делает один шаг, а его направление зависит от подключения контакта DIR.
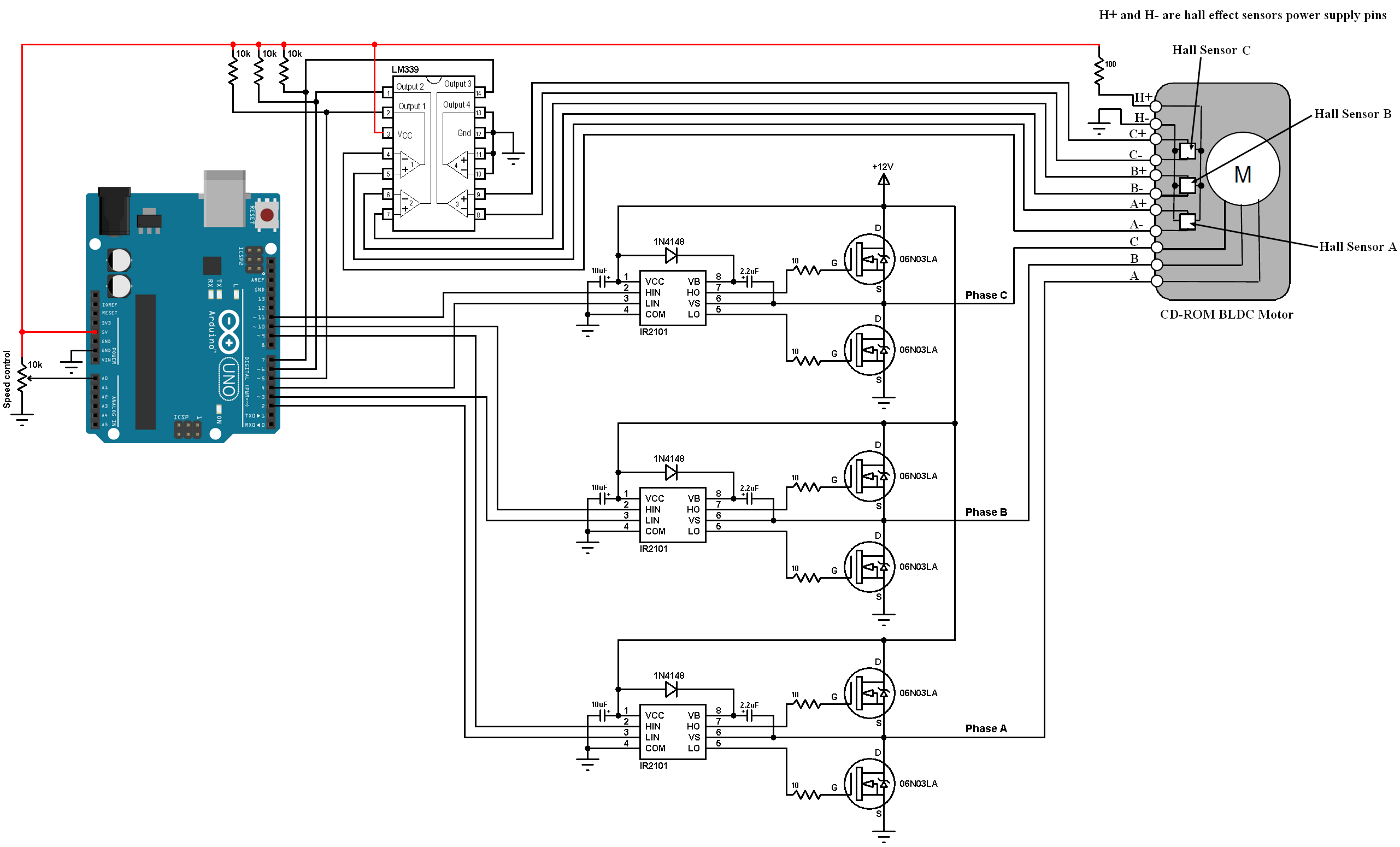
Как подключит трехфазный двигатель к ардуино
Содержание
- Управление щёточными моторами с Arduino
- Мосфет
- Реле и мосфет
- Специальный драйвер
- Моторы переменного тока
- Библиотеки
- Помехи и защита от них
- Индуктивный выброс напряжения
- Помехи от щёток
- Помехи по питанию, просадка
- Разделение питания
- Экранирование
- Видео
- Arduino управление частотным преобразователем
- Что такое Arduino?
- Что нужно знать прежде, чем начинать работать с Ардуино?
- Как начать проектировать систему управления 3-х фазным асинхронным мотором?
- Почему люди используют Arduino для управления трехфазным асинхронным мотором?
- Преимущества применения частного преобразователя на микроконтроллере Arduino
- Управление оборотами однофазного асинхронного двигателя с помощью Arduino
- Инженерно-техническое творчество
- Заключение
- Подключение моторчика к Ардуино
- Управление двигателем на Ардуино
- Как подключить моторчик к Arduino
- Скетч.
 Подключение мотора напрямую
Подключение мотора напрямую - Пояснения к коду:
- Скетч. Подключение мотора через транзистор
- Пояснения к коду:
- Скетч. Подключение мотора через драйвер
- Видео
Управление щёточными моторами с Arduino
Как вы знаете, никакую нагрузку мощнее светодиода нельзя подключать к Ардуино напрямую, особенно моторчики. Ардуино, да и вообще любой микроконтроллер – логическое устройство, которое может давать только логические сигналы другим железкам, а те уже могут управлять нагрузкой. Кстати, урок по управлению мощной нагрузкой постоянного и переменного тока у меня тоже есть. “Драйвером” мотора могут быть разные железки, рассмотрим некоторые из них.
При помощи двойного модуля реле (или просто двух реле) можно включать мотор в одну или другую сторону, а также выключать:
Купить модуль реле можно на Aliexpress.
Мосфет
Вместо “голого” мосфета можно использовать готовый китайский модуль:
Купить мосфет модуль можно на Aliexpress.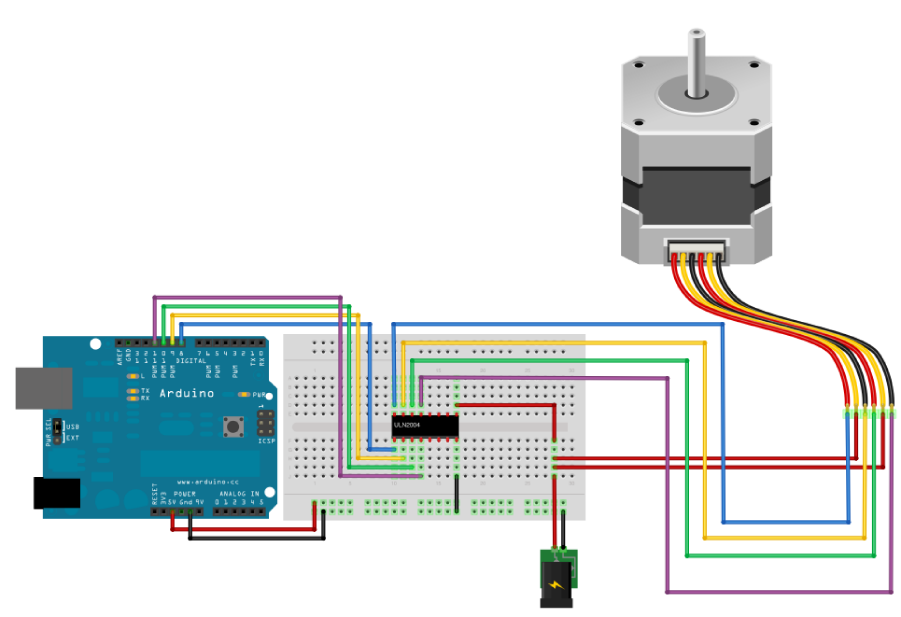
Реле и мосфет
Если объединить реле и мосфет – получим весьма колхозную, но рабочую схему управления скоростью и направлением мотора:
Специальный драйвер
Лучше всего управлять мотором при помощи специального драйвера, они бывают разных форм и размеров и рассчитаны на разное напряжение и ток, но управляются практически одинаково. Рассмотрим основные драйверы с китайского рынка:
| Драйвер | Vmot | Ток (пик) | Стоимость | Aliexpress |
| L298N | 4-50V | 1A (2A) | 100р | Купить |
| MX1508 | 2-9.6V | 1.5A (2.5A) | 20р | Купить |
| TA6586 | 3-14V | 5A (7A) | 100р (чип 30р) | Купить, купить, купить чип |
| L9110S | 2.5-12V | 0. 8A (1.5A) 8A (1.5A) | 50р | Купить |
| TB6612 | 4.5-13.5V | 1.2A (3A) | 80р | Купить |
| BTS7960 | 5.5-27V | 10A (43A) | 300р | Купить |
| Большой | 3-36V | 10A (30A) | 700р | Купить |
Остальные драйверы смотри у меня вот тут. Схемы подключения и таблицы управления:
Моторы переменного тока
Мотором переменного тока (220V от розетки) можно управлять при помощи диммера на симисторе, как в уроке про управление нагрузкой.
Библиотеки
У меня есть удобная библиотека для управления мотором – GyverMotor, документацию можно почитать вот здесь. Особенности библиотеки:
Помехи и защита от них
Индуктивный выброс напряжения
Мотор – это индуктивная нагрузка, которая в момент отключения создаёт индуктивные выбросы. У мотора есть щетки, которые являются источником искр и помех за счёт той же самой индуктивности катушки. Сам мотор потребляет энергию не очень равномерно, что может стать причиной помех по линии питания, а пусковой ток мотора так вообще сильно больше рабочего тока, что гарантированно просадит слабое питание при запуске. Все четыре источника помех могут приводить к различным глюкам в работе устройства вплоть до срабатывания кнопок на цифровых пинах, наведения помех на аналоговых пинах, внезапного зависания и даже перезагрузки микроконтроллера или других железок в сборе устройства.
Сам мотор потребляет энергию не очень равномерно, что может стать причиной помех по линии питания, а пусковой ток мотора так вообще сильно больше рабочего тока, что гарантированно просадит слабое питание при запуске. Все четыре источника помех могут приводить к различным глюкам в работе устройства вплоть до срабатывания кнопок на цифровых пинах, наведения помех на аналоговых пинах, внезапного зависания и даже перезагрузки микроконтроллера или других железок в сборе устройства.
Отсечь индуктивный выброс с мотора можно при помощи самого обычного диода, чем мощнее мотор, тем мощнее нужен диод, то есть на более высокое напряжение и ток. Диод ставится встречно параллельно мотору, и чем ближе к корпусу, тем лучше. Точно таким же образом рекомендуется поступать с электромагнитными клапанами, соленоидами, электромагнитами и вообще любыми другими катушками. Логично, что диод нужно ставить только в том случае, если мотор или катушка управляется в одну сторону. Важные моменты:
Помехи от щёток
Искрящиеся щетки мотора, особенно старого и разбитого, являются сильным источником электромагнитных помех, и здесь проблема решается установкой керамических конденсаторов с ёмкостью 0.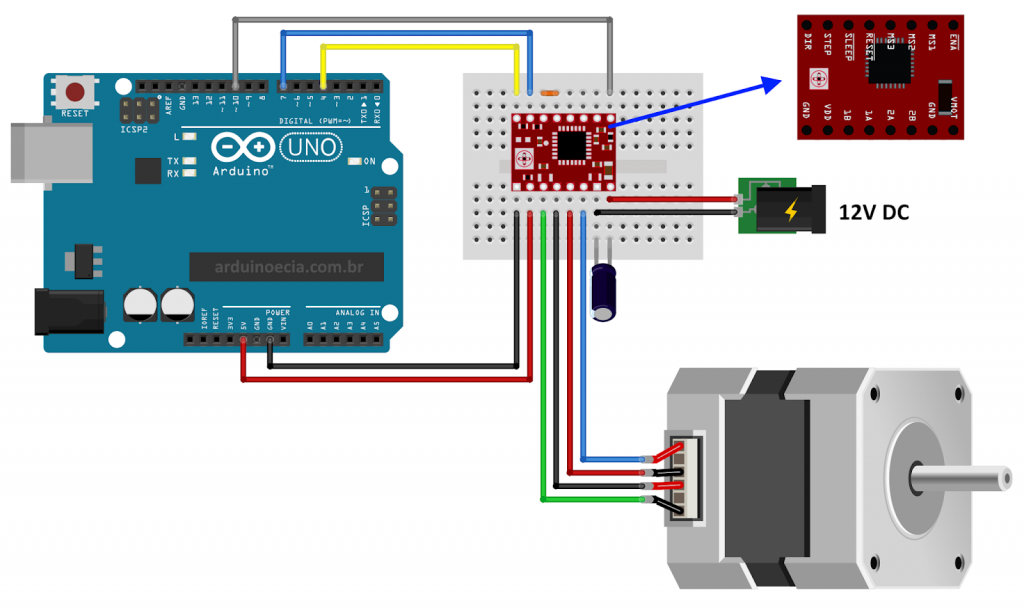 1-1 мкФ на выводы мотора. Такие же конденсаторы можно поставить между каждым выводом и металлическим корпусом, это ещё сильнее погасит помехи. Для пайки к корпусу нужно использовать мощный паяльник и активный флюс, чтобы залудиться и припаяться как можно быстрее, не перегревая мотор.
1-1 мкФ на выводы мотора. Такие же конденсаторы можно поставить между каждым выводом и металлическим корпусом, это ещё сильнее погасит помехи. Для пайки к корпусу нужно использовать мощный паяльник и активный флюс, чтобы залудиться и припаяться как можно быстрее, не перегревая мотор.
Помехи по питанию, просадка
Мотор потребляет ток не очень равномерно, особенно во время разгона или в условиях переменной нагрузки на вал, что проявляется в виде просадок напряжения по питанию всей схемы. Беды с питанием решаются установкой ёмких электролитических конденсаторов по питанию, логично что ставить их нужно максимально близко к драйверу, то есть до драйвера. Напряжение должно быть выше чем напряжение питания, а ёмкость уже подбирается по факту. Начать можно с 470 мкф и повышать, пока не станет хорошо.
Разделение питания
Если описанные выше способы не помогают – остаётся только одно: разделение питания. Отдельный малошумящий хороший источник на МК и сенсоры/модули, и отдельный – для силовой части, в том числе мотора.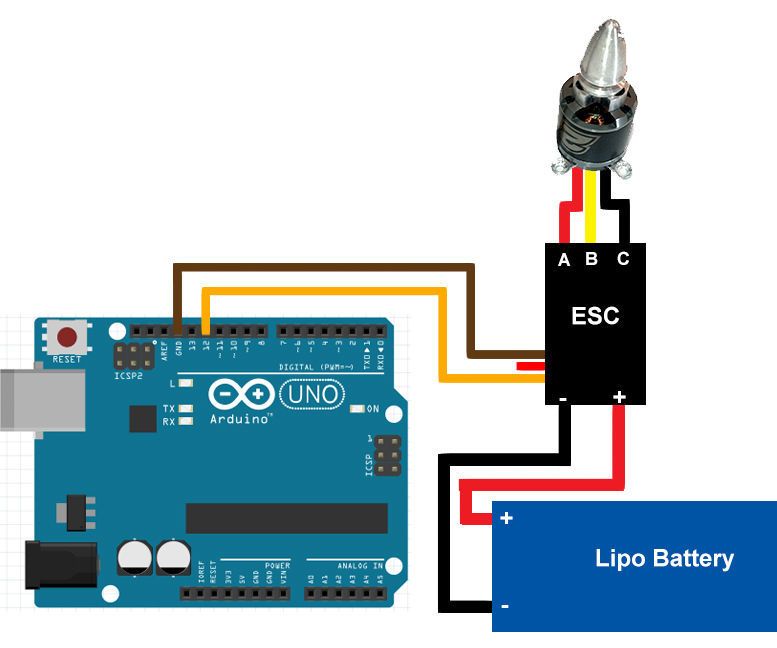 Иногда ради стабильности работы приходится вводить отдельный БП или отдельный аккумулятор для надёжности функционирования устройства.
Иногда ради стабильности работы приходится вводить отдельный БП или отдельный аккумулятор для надёжности функционирования устройства.
Экранирование
В отдельных случаях критичными являются даже наводки от питающих проводов моторов, особенно при управлении ШИМ мощными моторами и управлении мощными шаговиками в станках. Такие наводки могут создавать сильные помехи для работающих рядом чувствительных электронных компонентов, на аналоговые цепи, наводить помехи на линии измерения АЦП и конечно же на радиосвязь. Защититься от таких помех можно при помощи экранирования силовых проводов: экранированные силовые провода не всегда удаётся купить, поэтому достаточно обмотать обычные провода фольгой и подключить экран на GND питания силовой части. Этот трюк часто используют RC моделисты, летающие по FPV.
Видео
Источник
Arduino управление частотным преобразователем
Что такое Arduino?
Это небольшое электронное устройство, включающее в себя одну печатную плату, которая способна управлять различными приборами и оборудованием (в том числе электродвигателями), осуществлять приём и передачу данных.
Реальный старт в познании аппаратно-программных средств построения простых систем автоматики. Она очень проста в освоении и не требует почти никаких предварительных условий, кроме пытливого ума.
Имеет ценность в качестве учебного пособия для неофитов, и в качестве инструмента реализации проекта для любителей, и как инструмент прототипирования для профессионалов.
Для неофитов здесь все покажется новым.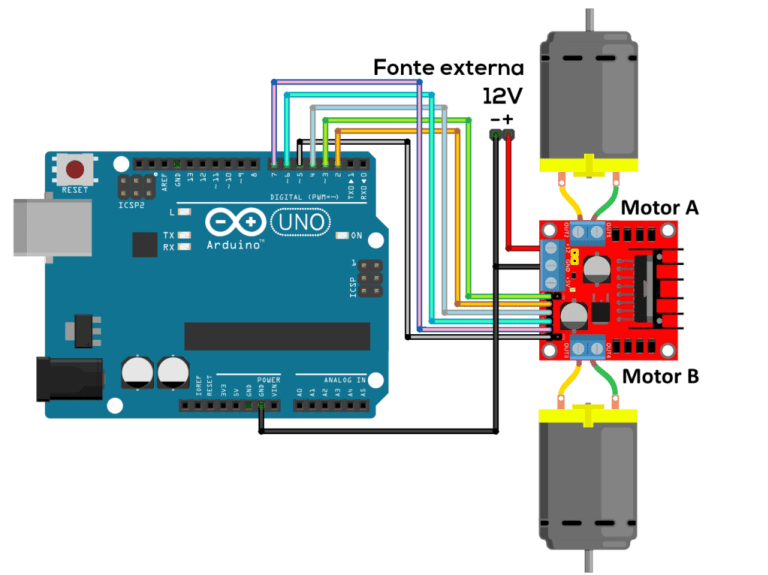 Для любителей Arduino – устройство применения своих знаний и возможность сосредоточиться на битах, которые являются новыми для них, или сложными для восприятия. Профессионалы используют устройство ради получения прототипа проекта с наименьшей стоимостью реализации заказного оборудования и прошивки.
Для любителей Arduino – устройство применения своих знаний и возможность сосредоточиться на битах, которые являются новыми для них, или сложными для восприятия. Профессионалы используют устройство ради получения прототипа проекта с наименьшей стоимостью реализации заказного оборудования и прошивки.
В любом случае, пользователь получит хорошее представление о программировании на C. Это отличная отправная точка.
Что нужно знать прежде, чем начинать работать с Ардуино?
Особых знаний точно не потребуется, но необходимо уметь читать и следовать инструкциям. Они предназначены для того, чтобы познакомить начинающих с электроникой и программированием. Большинство молодых людей уже в возрасте от 12 лет и старше легко овладевают методику.
Рекомендуется покупать качественный комплект с хорошим выбором деталей в комплекте с учебным материалом, необходимымдля получения навыков.
Что нужно еще помнить? Светодиоды не загораются, если установлены с неправильной полярностью.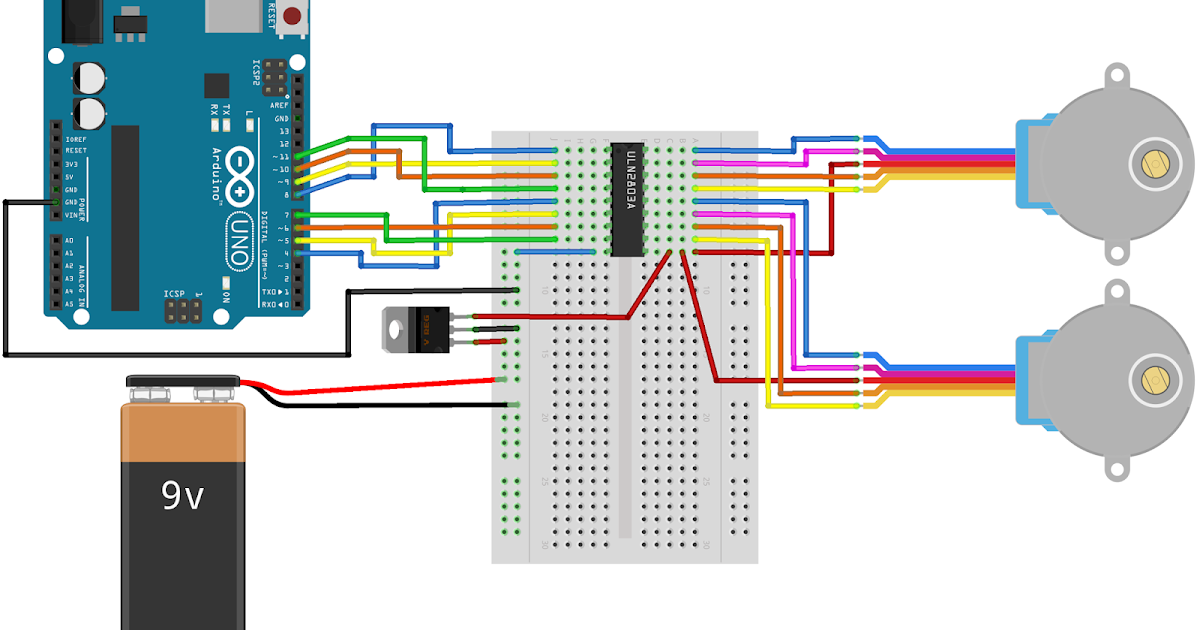 Установленные диоды в обратном направлении могут привести к короткому замыканию. Статическое электричество рук может повредить или уничтожить интегральные схемы и транзисторы.
Установленные диоды в обратном направлении могут привести к короткому замыканию. Статическое электричество рук может повредить или уничтожить интегральные схемы и транзисторы.
Никогда не работайте с оборудованием, подключенным к электросети из-за риска поражения электрическим током.
Как начать проектировать систему управления 3-х фазным асинхронным мотором?
Изначально посмотреть видео, где продемонстрирована реализация проекта. После просмотра видео вы будете в состоянии сделать маленький проект в Arduino.
Почему люди используют Arduino для управления трехфазным асинхронным мотором?
Трехфазный асинхронный двигатель является самым эффективным способом, когда необходимо преобразовать электроэнергию в крутящий момент. Крутящий момент преобразуется в давление, скорость движения влияет в свою очередь на расход.
Наиболее эффективно выполняется регулировка вращения электродвигателя методом изменения частоты сети питания. Самое простое, это сделать посредством частотного преобразователя на микроконтроллере.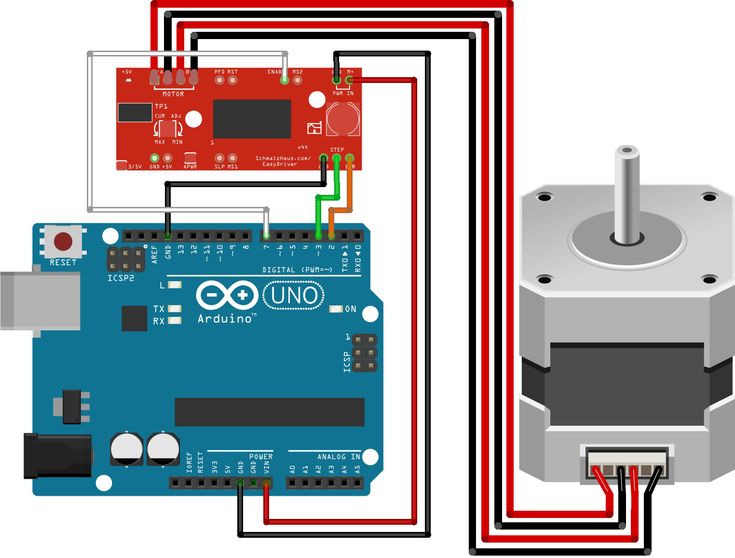
Arduino — торговая марка аппаратно-программных средств построения простых систем автоматики и робототехники, ориентированная на непрофессиональных пользователей.
Понижение сетевого напряжения осуществляетсяпри помощи трансформатора, а выпрямление – диодного моста. Микроконтроллер работает в режиме генератора переменной частоты, коммутирует ключ на транзисторах. Переменное напряжение повышается при помощи второго трансформатора и подается на обмотки питания электродвигателя.
Частоту коммутации (а также скорость вращения вала мотора) задаёт переменный резистор в широком диапазоне. Если применить переключатель и постоянные резисторы, можно управлять частотой ступенчато. Подключив к одному из входов микроконтроллера Arduino датчик тока, можно использовать программу, которая автоматически будет снижать скорость вращения вала при нежелательном повышении нагрузки.
Программа посредством специальных кодов включает преобразователь, считывает величину напряжения и регулирует его. Далее отдаёт команду переходить к библиотеке передатчика для генерирования кода и его передачи. По мере роста нагрузки, рабочее напряжение компенсируется и регулируется. Для этого применяется два способа: установка большого конденсатора для запасной энергии либо повышающего преобразователя. Выход при этом необходимо контролировать стабилизатором.
Далее отдаёт команду переходить к библиотеке передатчика для генерирования кода и его передачи. По мере роста нагрузки, рабочее напряжение компенсируется и регулируется. Для этого применяется два способа: установка большого конденсатора для запасной энергии либо повышающего преобразователя. Выход при этом необходимо контролировать стабилизатором.
В этом заключается основной принцип взаимодействия между электронными устройствами, движком и платой.
Преимущества применения частного преобразователя на микроконтроллере Arduino
Регулировка оборотами однофазного асинхронного мотора с помощью микроконтроллера обеспечивает значительную экономию затрат на электроэнергию при частичной нагрузке. Поскольку потребление электричества и скорость вращения вала мотора прямо пропорциональные величины, экономия может быть значительной при правильном применении. Для примера рассмотрим систему, в которой используется насос в установке очистки сточных вод.
Небольшой частной фирме необходимо прокачивать яму лишь перед большим дождём или при увеличенном использовании канализации (праздничные выходные) и не нужны полные возможности насоса. Если насос будет постоянно работать, компания будет тратить значительное количество электроэнергии за работу насоса на полную мощность.Суть заключается ещё в том, чтобы в зависимости от давления в системе канализации и водоотведения, у насоса плавно набиралисьобороты и поддерживалось необходимое давление в системес регулированием частоты вращения движка.
Если насос будет постоянно работать, компания будет тратить значительное количество электроэнергии за работу насоса на полную мощность.Суть заключается ещё в том, чтобы в зависимости от давления в системе канализации и водоотведения, у насоса плавно набиралисьобороты и поддерживалось необходимое давление в системес регулированием частоты вращения движка.
Со школьной скамьи известно простое уравнение:
Мощность = крутящий момент х угловая скорость.
Для конкретной конфигурации мотора мощность – величина постоянная. Так как угловая скорость увеличивается, крутящий момент уменьшается. Таким образом, крутящий момент больше на низких оборотах, и наоборот.
За счет использования Arduino, таким образом, можно замедлить мотор насоса до 50%, и все равно прокачивать большой объем воды, и образом сэкономить более 50% от необходимого электричества. Экономия будет просто астрономической при частичном или регулярном использовании преобразователя.
Управление оборотами однофазного асинхронного двигателя с помощью Arduino
Для начала необходимо попытаться больше узнать про особенности двигателя. Они бывают разные и способы управления ими тоже разные.
Они бывают разные и способы управления ими тоже разные.
Существует три способа регулирования частоты вращения асинхронного мотора:
Частотник нужен для обеспечения нормального управления процессами, которые требуют регулирования. Пускатели (УПП, софт-стартеры) уменьшают ударные нагрузки от сетевого напряжения с помощью фазо-импульсного (ФИУ) способа подачи питания на электродвигатель. Словно диммер, они обеспечивают плавное нарастание тока потребления электродвигателя и препятствуют развитию КЗ в питающей сети при пуске.
После разгона двигателя от УПП, двигатель просто полностью переходит на питание от сети, так как УПП синхронизировано с сетью. Использовать ФИУ для полноценного управления электродвигателем не получится, лишь в отдельных случаях это может «прокатить».
Если ПЧ для вас дорогое удовольствие, то можно попробовать классический метод регулировки подачи воздуха – управление шиберной задвижкой от сервопривода. Здесь уже упор делается на механику. Собственно сам электродвигатель при таком способе всегда будет работать в номинале.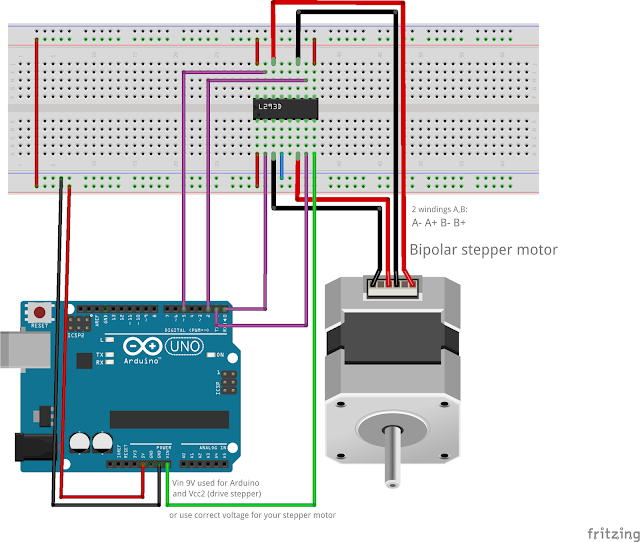
Инженерно-техническое творчество
Как сделать частотный преобразователь своими руками? Можно прошагать весь Интернет для того чтобы найти лучшие источники информации по теме поделок и не найти ни одного конкретного ответа на свой вопрос, так как каждый проект требует разных компонентов, но есть общий принцип проектирования. Вот он вам пригодится.
Начнем с определения того, что вы хотите по вашей схеме сделать. Разделите задачу на простые задачки по каждому электронному компоненту, которые можно завершить. В ходе исследования вы встретите целый ряд конструкций, это поможет увидеть достоинства и недостатки каждой из схем, которую вы считаете интересной и связанной с вашей проблемой.
Начинать лучше с моторов и работать в обратном направлении к созданию процессора управления электродвигателями. Вы должны выбрать двигатель, исходя из требуемого вращающего момента, скорости, требования к питанию.
Это электротехническая работа, которая требует интенсивного познания электричества. Во многом зависит от того, как глубоко вы хотите познать теорию.Совсем не достаточно знать компоненты. Проектирование схемы заключается в вычислениях напряжений и токов, выборе нужных деталей. Результатом проектирования является составление спецификации оборудования и материалов.Знания о точныхэлементах спецификации, которые вам необходимы, приходят лишь с опытом.
Во многом зависит от того, как глубоко вы хотите познать теорию.Совсем не достаточно знать компоненты. Проектирование схемы заключается в вычислениях напряжений и токов, выборе нужных деталей. Результатом проектирования является составление спецификации оборудования и материалов.Знания о точныхэлементах спецификации, которые вам необходимы, приходят лишь с опытом.
Вам нужно будет сделать анализ цепи для определения необходимых компонентов вашей спецификации, включая мин./макс. расчетов по допускам и температуре. На основании исходных данных электродвигателя составляется блок-схема и подбираются электронные компоненты. В качестве примера представляем перечень основных элементов самодельного электропривода5-200Гц (10-400Гц):
| п. п. | Название элементов | Количество, шт. |
| 1 | Силовой модуль IRAMS10UP60B со встроенным драйвером | 1 |
| 2 | BB-102 Макетная плата для монтажа без пайки | 1 |
| 3 | BBJ-65 Комплект цветных монтажных перемычек MM для макетных плат без пайки | 1 |
| 4 | Контроллер ATmega48 | 1 |
| 5 | Трансформатор 220/12 В 300 Вт | 1 |
Просмотрите для всех элементов технические характеристики, указанные производителем. Выполните тепловые расчеты и продумайте охлаждение и меры теплоотвода по мере необходимости. Разумеется, это требует многолетнего опыта, чтобы получить хороший результат. Вы также можете воспользоваться советами и рекомендациями более опытных электриков.
Выполните тепловые расчеты и продумайте охлаждение и меры теплоотвода по мере необходимости. Разумеется, это требует многолетнего опыта, чтобы получить хороший результат. Вы также можете воспользоваться советами и рекомендациями более опытных электриков.
В итоге у вас получится макет-тренажёр.
Следует убедиться, что двигатель надежно установлен, дабы он не ринулся «гулять». Тестирование собранного макета покажет, насколько схема позволит вам набрать скорость электродвигателя, повернуть всё вспять или остановить систему. Вы можете использовать переключатели для этого тренажера. Будьте готовы к тому, что придётся переделывать систему. Только не стоит изобретать колесо. Мудрость– это правильно суметь воспользоваться тем, что другие освоили или даже усовершенствовать чужое изобретение.
Попробуйте разные компоненты в цепи. Используйте мультиметр, чтобы получить результаты. Через какое-то время вы сможете убежденно сказать, почему вы используете резистор 2 Вт вместо 0,25 Вт.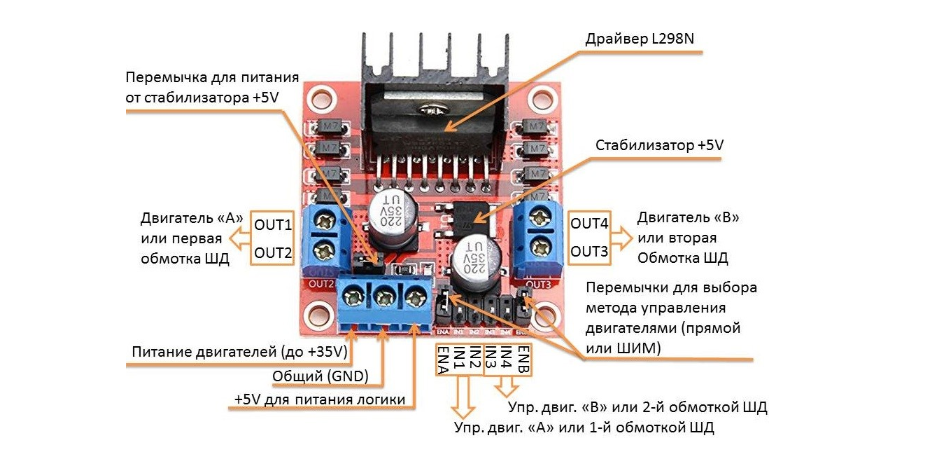
Большинство полупроводниковых компаний продают оценочные платы вместе со своей продукцией. Купите не одну, побольше для учёбы. Инженерное дело – это делать много ошибок, за исключением удара электрическим током или пожара.
Для каждого подэтапа сделайте схемку и получите результат. Соедините частитак, чтобы выходные параметры одной схемы служили входными данными для следующей. Далее работа для художественного гения. Кстати, это такая же процедура, как можно было бы использовать в написании программы или алгоритма.
Разработанный привод на деле отличается минимальной себестоимостью, наличием необходимых защит, эффективностью и гибкостью конструкции. Хорошим подсказчиком неисправностей служит светодиод. Он мигает в тех случаях, когда система находится в настройке, перегружена и т. д. В программе микроконтроллера учтены всевозможные ситуации. Полная автоматизация технологического процесса при экономном электропотреблении.
Но имейте в виду, что вы просто выполнили один шаг в процессе проектирования.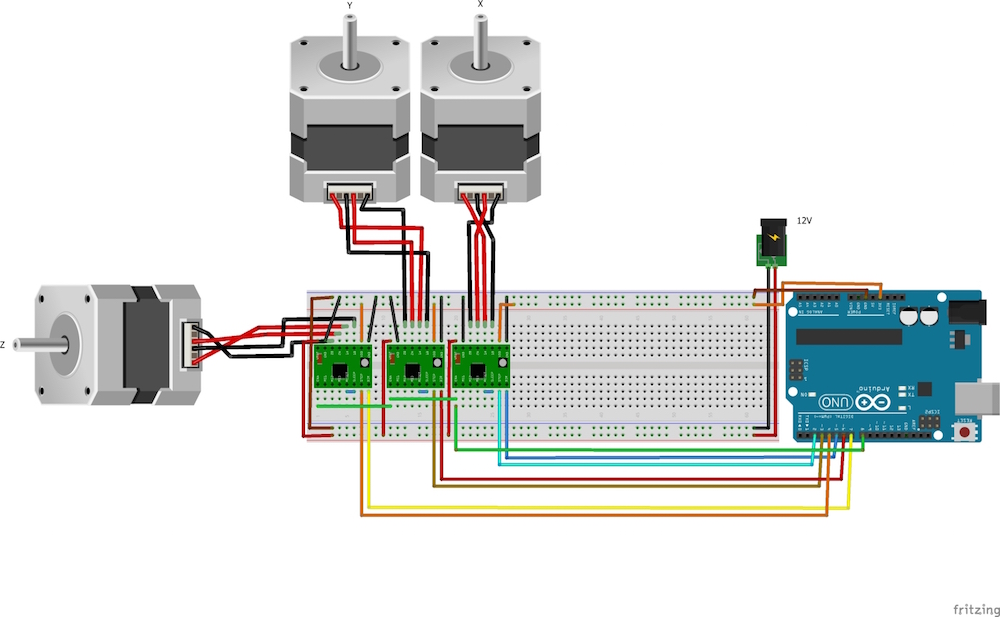 В реальном мире проектирования, думается, никто из нас не станет в подробностях спецификацию, схему, анализ и все остальное. Что касается проектов, как правило, совершенствованию нет предела. Только некоторые работы можно повторно использовать.
В реальном мире проектирования, думается, никто из нас не станет в подробностях спецификацию, схему, анализ и все остальное. Что касается проектов, как правило, совершенствованию нет предела. Только некоторые работы можно повторно использовать.
Заключение
Когда частные преобразователи были введены в первые, возможно причины были иные, нежели теперь. В современных условиях, это:
Давайте возьмем небольшой конвейер в качестве примера. Традиционный способ, когда необходимо ускорить процесс изменения, необходимо сначала остановить процесс. Если взять старый механизм и поставить новый, это легко может сократить время, затраты на электроэнергию.
В дополнение к вышеуказанным причинам, функции преобразователя теперь могут быть запрограммированы для специфического применения. При помощи системы можно просто регулировать скорость в базовом диапазоне. Причём контролировать более точно. Частотник может использоваться для преобразования постоянного тока в трехфазный переменный ток с лучшими показателями крутящего момента.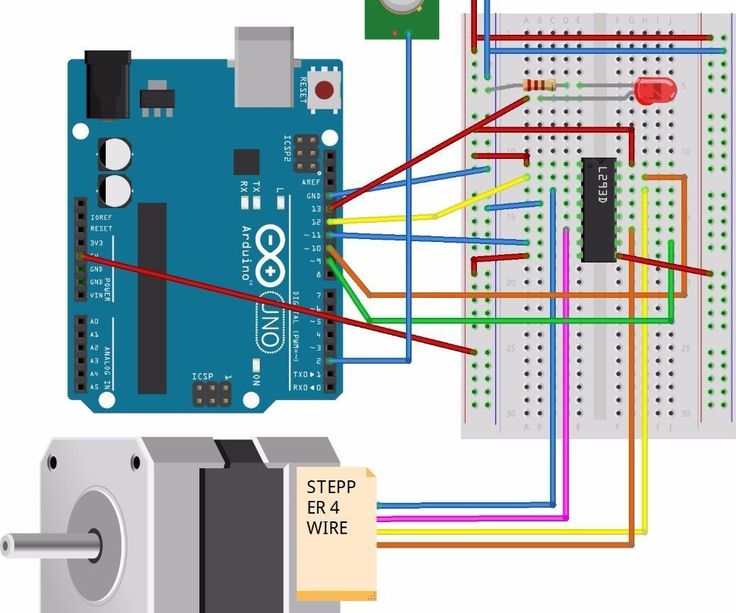
Если захотите получить уйму опыта то можете попробовать самому сделать схему управления двигателем, ГУГЛ в помощь. Тема очень непростая, тут и электроника и программирование, даже математика будет встречаться.Как правило, кто занимается этой темой серьёзно, схемой вряд ли поделятся. Одно можно сказать, освоив эту тему, вы уже не будете считать себя новичком в электронике и программировании микроконтроллеров.
Источник
Подключение моторчика к Ардуино
Подключение мотора к Ардуино ► потребуется при сборке машинки или катера. Рассмотрим различные варианты подключения коллекторного двигателя к Arduino.
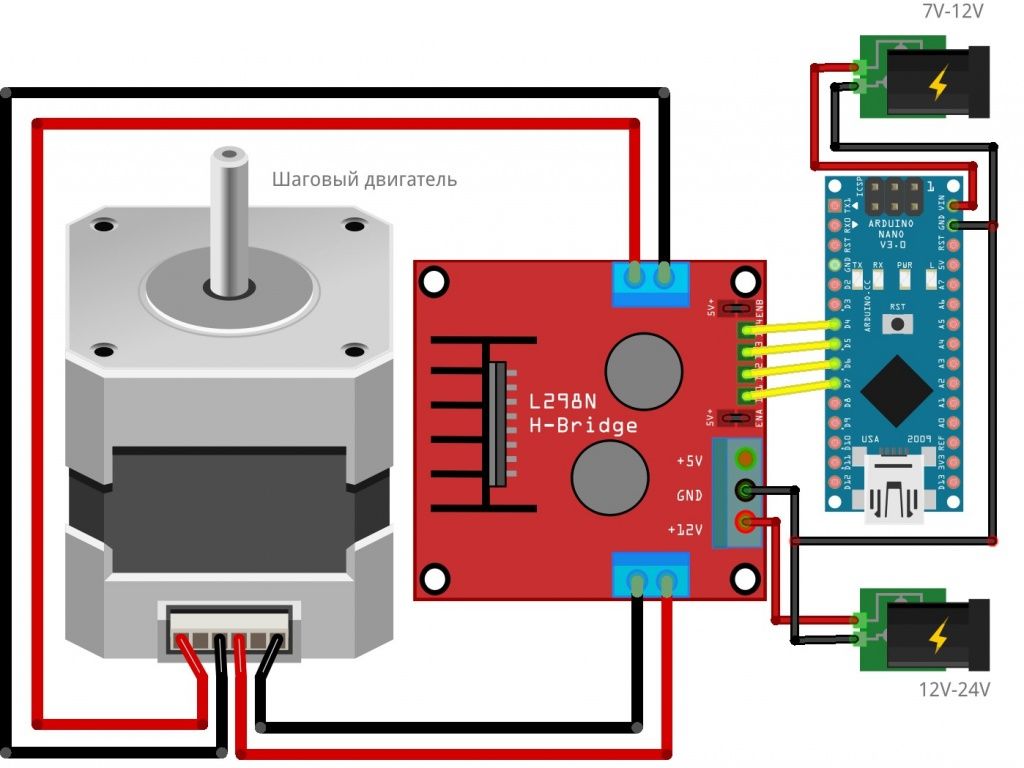
Подключение мотора постоянного тока к Ардуино (коллекторного двигателя) требуется при сборке машинки или катера на микроконтроллере Arduino. Рассмотрим различные варианты подключения двигателей постоянного тока: напрямую к плате, через биполярный транзистор, а также с использованием модуля L298N. В обзоре размещены схемы подключения и коды программ для всех перечисленных вариантов.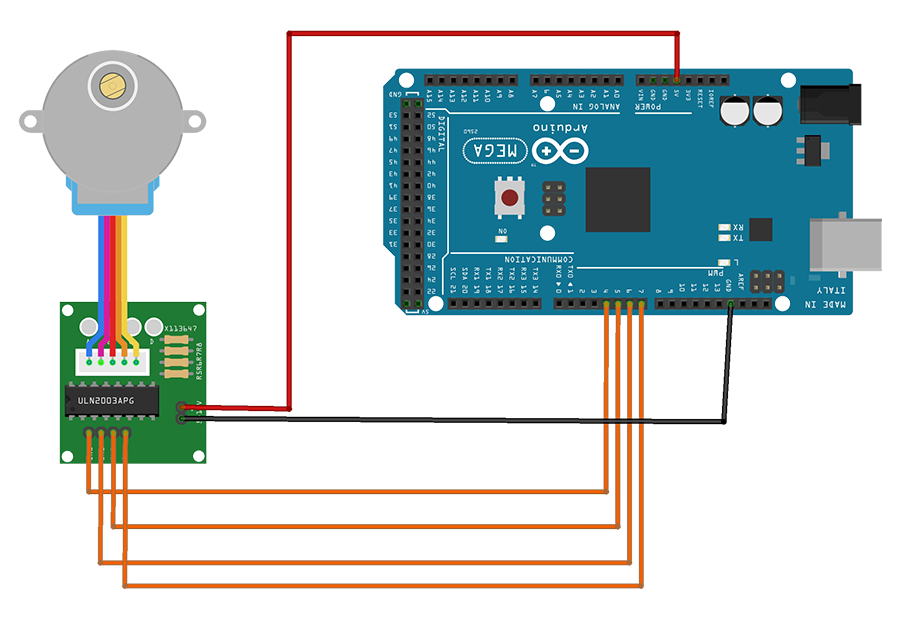
Управление двигателем на Ардуино
Коллекторный моторчик может быть рассчитан на разное напряжения питания. Если двигатель работает от 3-5 Вольт, то можно моторчик подключать напрямую к плате Ардуино. Моторы для машинки с блютуз управлением, которые идут в комплекте с редукторами и колесами рассчитаны уже на 6 Вольт и более, поэтому ими следует управлять через полевой (биполярный) транзистор или через драйвер L298N.
Принцип работы и устройство мотора постоянного тока
На схеме показано устройство моторчика постоянного тока и принцип его работы. Как видите, для того, чтобы ротор двигателя начал крутиться к нему необходимо подключить питание. При смене полярности питания, ротор начнет крутиться в обратную сторону. Драйвер двигателей L298N позволяет инвертировать направление вращения мотора fa 130, поэтому его удобнее использовать в своих проектах.
Как подключить моторчик к Arduino
Для этого занятия нам потребуется:
Перед выбором способа управления двигателем от Arduino Uno r3, уточните на какое напряжение рассчитан ваш моторчик. Если питание требуется более 5 Вольт, то следует использовать транзистор или драйвер. Распиновка транзисторов может отличаться от приведенного примера (следует уточнить распиновку для своего типа). Драйвер L298N позволит не только включать мотор, но и изменять направление вращения.
Если питание требуется более 5 Вольт, то следует использовать транзистор или драйвер. Распиновка транзисторов может отличаться от приведенного примера (следует уточнить распиновку для своего типа). Драйвер L298N позволит не только включать мотор, но и изменять направление вращения.
Скетч. Подключение мотора напрямую
Подключение мотора к Ардуино напрямую — самый простой вариант включения вентилятора на Arduino или машинки. Команда для включения двигателя не отличается, от команды при подключении светодиода к микроконтроллеру. Функция digitalWrite включает/выключает подачу напряжения на цифровой порт, к которому подключен двигатель постоянного тока. Соберите схему и загрузите программу.
Пояснения к коду:
Скетч. Подключение мотора через транзистор
Подключение мотора через транзистор к Ардуино потребуется, если двигатель никак не хочет включаться от платы напрямую, то следует использовать порт 5 Вольт на микроконтроллере или внешний источник питания. Транзистор будет играть роль ключа, замыкая/размыкая электрическую цепь.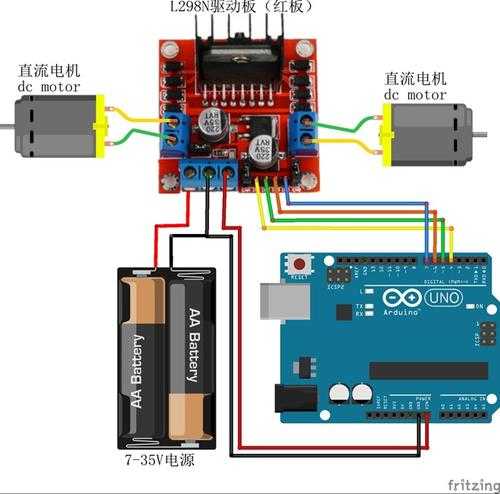 Сам транзистор управляется цифровым портом. Соберите схему, как на картинке и загрузите программу.
Сам транзистор управляется цифровым портом. Соберите схему, как на картинке и загрузите программу.
Подключение FA-130 мотора постоянного тока — Motor DC Arduino
Пояснения к коду:
Скетч. Подключение мотора через драйвер
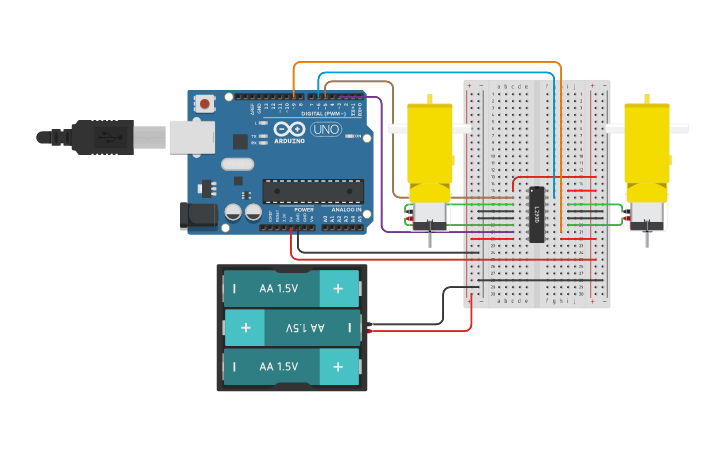
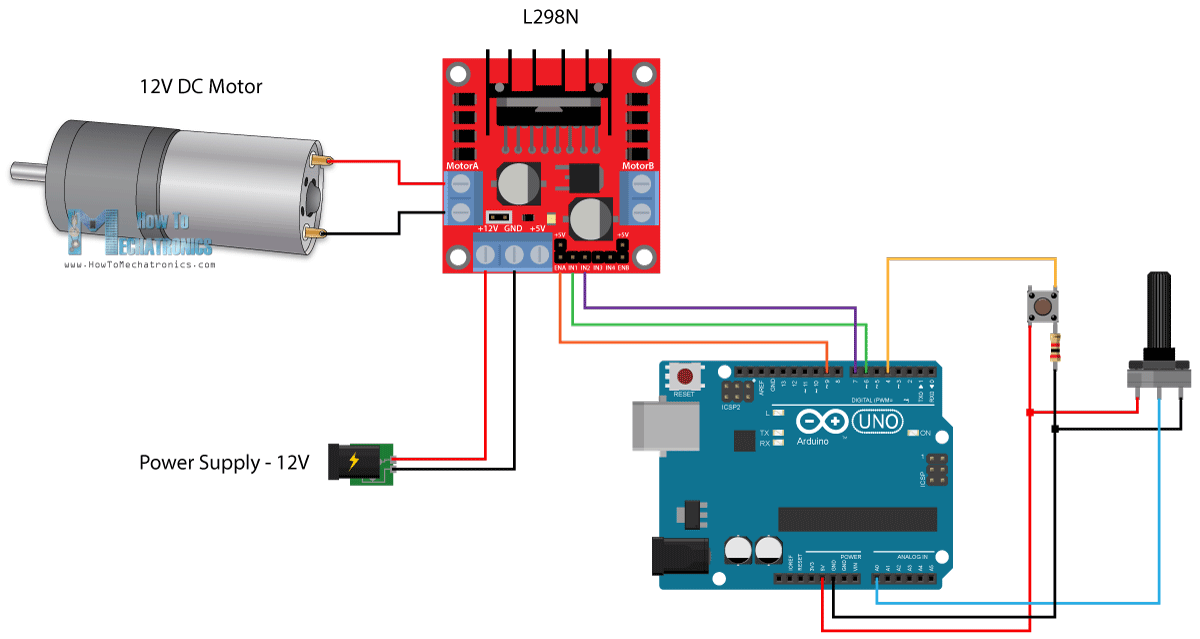
Подключение мотора к Ардуино через драйвер L298N или Motor Shield L293D позволит менять направление вращения ротора. Но для использования данных модулей потребуется установить соответствующие библиотеки для Ардуино. В примере мы использовали схему подключения двигателя с помощью модуля L298N. Соберите схему, как на картинке ниже и загрузите следующий скетч с использованием.
Источник
Видео
Трёхфазный двигатель от Arduino UNO
Уроки Arduino — управление бесколлекторным мотором
ПОДКЛЮЧЕНИЕ ТРЕХФАЗНОГО ДВИГАТЕЛЯ В СЕТЬ 380 Вольт
Как просто подключить трехфазный двигатель треугольником и звездой в сеть 220, через конденсатор.
Как подключить трехфазный двигатель через магнитный пускатель.
Как быстро и просто подключить трехфазный двигатель в однофазную сеть DuMA8819
Подключение двигателя жесткого диска(HDD) без драйвера. (ARDUINO) Часть 3
как подключить трехфазный двигатель в однофазную сеть
Подключения трехфазного двигателя
Пошаговая схема подключения трехфазного двигателя в однофазную сеть. Повторение — мать учения!
Как подключить мотор к Ардуино?
Spis treści:
- 1 С чего начать?
- 2 Какой двигатель для Arduino?
- 3 Подготовка H-моста
- 4 Как подключить двигатель к Arduino?
Время чтения: < 1 мин.
Arduino — отличный пример оборудования, к которому можно подключить один или несколько двигателей, а затем управлять ими по своему усмотрению. Но как это сделать?
С чего начать?
Прежде всего, в основе этого типа операции лежит использование соответствующего Н-моста . Это схема, состоящая из подходящей комбинации транзисторов — в магазинах электроники можно найти множество готовых интегральных схем в удобных корпусах (выполненных по технологии THT или SMD).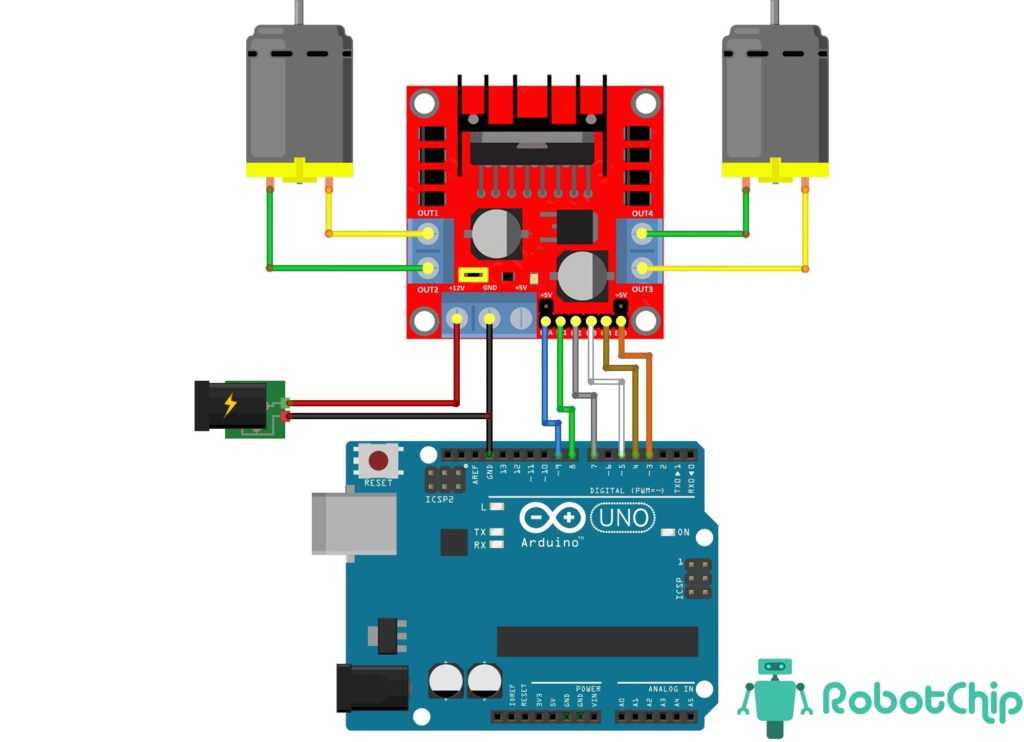 Использование готового решения — самый простой и быстрый способ, но для опытных электронщиков также возможна сборка собственного варианта Н-моста из транзисторов.
Использование готового решения — самый простой и быстрый способ, но для опытных электронщиков также возможна сборка собственного варианта Н-моста из транзисторов.
Вторым важным элементом является подготовка надлежащего источника питания . Все может быть основано на одном источнике, но гораздо лучшим решением будет подготовить источник питания для логической системы и аккумуляторы для самого двигателя. Два отдельных источника питания — это способ сделать всю систему более стабильной и безопасной. Также приобретите набор резисторов разного сопротивления и несколько конденсаторов (электролитических и керамических).
Плата Arduino с контактной пластиной Для начала вам пригодится набор инструментов , таких как контактная пластина и соединительные кабели . Это позволит вам легко и быстро модифицировать схему любым удобным для вас способом. Если это так, убедитесь, что ваша плата Arduino имеет правильную распиновку, чтобы вы могли легко подключиться к ней с помощью проводов.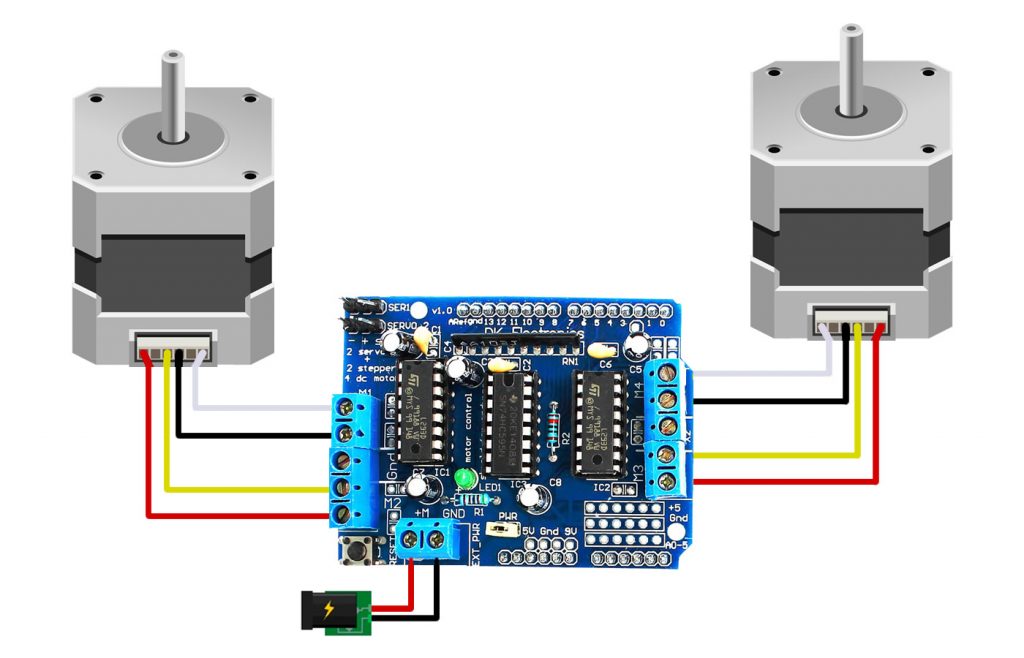 Полоса с золотым контактом, припаянная непосредственно к макетной плате, всегда работает лучше всего. С таким подготовленным оборудованием вы можете легко подключить двигатель к Arduino.
Полоса с золотым контактом, припаянная непосредственно к макетной плате, всегда работает лучше всего. С таким подготовленным оборудованием вы можете легко подключить двигатель к Arduino.
Какой двигатель для Arduino?
Чтобы узнать, как подключить двигатель, сначала необходимо точно знать какой двигатель вы собираетесь подключить . Наиболее распространенные двигатели, используемые в электронике, представляют собой обычные двигатели постоянного тока, и это будет служить примером. Вы можете использовать его, например, для управления отдельными суставами шагающего мобильного робота.
ПРОВЕРКА В МАГАЗИНЕ
Подготовка H-образного моста
Используя H-образный мост, вы сможете легко контролировать не только скорость вращения вала двигателя, но и1 его направление 9002. После того, как вы выбрали двигатель постоянного тока, вы должны знать, какой максимальный ток он может генерировать (максимальная нагрузка). Исходя из этого, вы сможете выбрать подходящий Н-мост (с соответствующей пропускной способностью по току). Также подумайте, сколько двигателей вы хотели бы контролировать одновременно в вашем целевом проекте. Если вы выберете готовую схему H-моста, вы, вероятно, сможете использовать, например, двойные мосты (заключенные в один корпус).
Исходя из этого, вы сможете выбрать подходящий Н-мост (с соответствующей пропускной способностью по току). Также подумайте, сколько двигателей вы хотели бы контролировать одновременно в вашем целевом проекте. Если вы выберете готовую схему H-моста, вы, вероятно, сможете использовать, например, двойные мосты (заключенные в один корпус).
Вместе со схемой вы, скорее всего, получите схему выводов схемы (или она будет доступна на сайте производителя). Там вы найдете контакты, отвечающие за землю (все должны быть подключены к GND), контакты, к которым вы должны подключить источник питания, контакты, отвечающие за управление скоростью двигателя, и контакты, отвечающие за направление вращения двигателя. вал двигателя. Теперь, когда вы знаете расположение всех контактов, вы можете разместить H-мост в центре печатной платы.
Как подключить двигатель к Arduino?
Следующим шагом необходимо подключить все пины, отвечающие за массу, к «минусу» на контактной плате.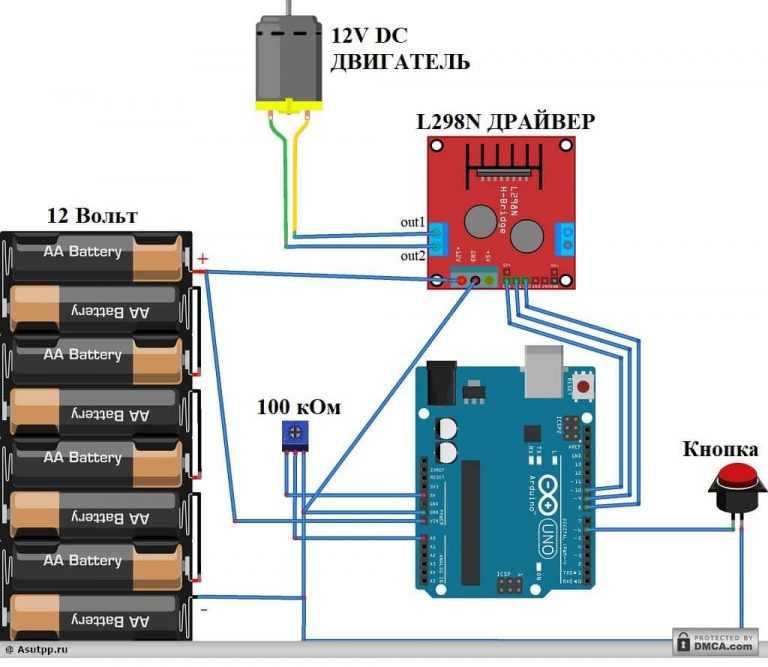 Далее подключите все пины, отвечающие за управление отдельными параметрами двигателя, затем подключите выводы от H-моста напрямую к двигателю и подключите Arduino к H-мосту. Устранив возможные ошибки на этом этапе, можно защитить H-мост, моторы и самое главное плату Arduino от повреждений .
Далее подключите все пины, отвечающие за управление отдельными параметрами двигателя, затем подключите выводы от H-моста напрямую к двигателю и подключите Arduino к H-мосту. Устранив возможные ошибки на этом этапе, можно защитить H-мост, моторы и самое главное плату Arduino от повреждений .
ПРОВЕРКА В МАГАЗИНЕ
Убедившись в правильности подключения, можно одинаково аккуратно подключить питание к моторам (например от 9В батареи), а затем к логике (например от компьютера через USB-кабель или от отдельного источника питания). Вы сможете управлять двигателем, правильно запрограммировав плату Arduino . Например, вы можете программно связать направление и скорость двигателя с подключенным потенциометром, который будет придавать двигателю различную скорость и направление пропорционально степени поворота.
Jak oceniasz ten wpis blogowy?
Kliknij gwiazdkę, aby go ocenic!
Средняя оценка: 0 / 5. Личный голос: 0
Личный голос: 0
Jak dotąd brak głosów! Bądź pierwszą osobą, która oceni ten wpis.
Arduino uno управляет двигателем постоянного тока в обоих направлениях вперед и назад с помощью драйвера двигателя h-bridge L293d
By EG Projects
В этом уроке я научу вас, как управлять небольшим двигателем постоянного тока с Arduino Uno, используя L29.Драйвер двигателя 3D h-bridge ic. Я буду контролировать направление вращения (по часовой стрелке и против часовой стрелки) двигателя постоянного тока с помощью контроллера драйвера двигателя l293d и Arduino Uno. Учебник поможет вам понять, как легко вращать двигатель постоянного тока как по часовой стрелке, так и против часовой стрелки, используя l293d и arduino uno.
Микроконтроллеры сами по себе не могут управлять двигателем постоянного тока
Мы все знаем, что микроконтроллеры сами по себе не могут управлять двигателями постоянного тока. Поскольку ток, который они выводят на свои выходные контакты, недостаточен для привода небольшого двигателя постоянного тока.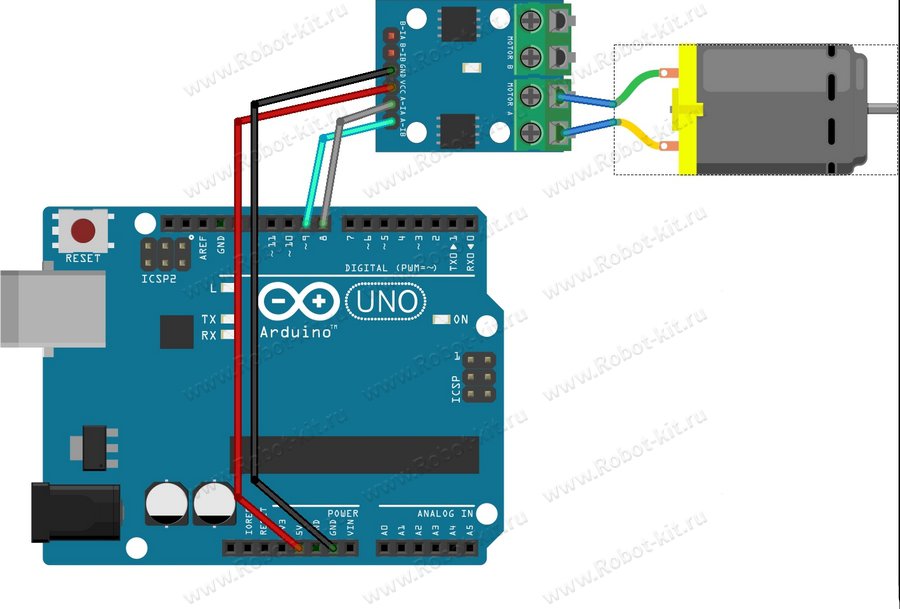 Обычно контакты ввода-вывода микроконтроллера выводят (20–40 мл ампер) токов. Выводы Arduino uno gpio могут выдавать 40 млн ампер непрерывного тока, но 40 мА недостаточно для привода двигателя постоянного тока.
Обычно контакты ввода-вывода микроконтроллера выводят (20–40 мл ампер) токов. Выводы Arduino uno gpio могут выдавать 40 млн ампер непрерывного тока, но 40 мА недостаточно для привода двигателя постоянного тока.
Внешняя схема с микроконтроллером для привода двигателя постоянного тока
Для вращения и перемещения шпинделя или вала двигателю постоянного тока требуется постоянный ток от 100 до 250 миллиампер. Поэтому очевидно, что нам нужен внешний источник с микроконтроллером для управления двигателем постоянного тока. Лучшим решением является использование транзисторов и полевых МОП-транзисторов для привода двигателя постоянного тока. Чтобы контролировать направление вращения двигателя, мы должны использовать несколько транзисторов и полевых транзисторов. Также мы должны ввести правильную логику в виде программного кода в Arduino, чтобы вращать двигатель в любом направлении.
Использование предварительно собранного драйвера двигателя постоянного тока
Наиболее популярными драйверами/схемами двигателя постоянного тока среди разработчиков встраиваемых систем является схема Н-моста. H-мост представляет собой комбинацию из 4 транзисторов или полевых МОП-транзисторов, расположенных в фиксированной линейной схеме. Логическая схема H-моста показана ниже.
H-мост представляет собой комбинацию из 4 транзисторов или полевых МОП-транзисторов, расположенных в фиксированной линейной схеме. Логическая схема H-моста показана ниже.
Логическая схема Н-моста
Поскольку создание схемы Н-моста занимает много времени, а сама схема громоздка и занимает много места, мы можем использовать драйвер двигателя l293d. L293d представляет собой схему h-моста в небольшой микросхеме, которая проста в использовании и обращении, а также занимает меньше места, чем стандартная схема h-моста с линейными компонентами.
Если вы новичок и не знаете распиновку l293d, ее внутреннюю структуру и как ее эффективно использовать? Просто воспользуйтесь приведенным ниже руководством, оно поможет вам понять код Arduino, написанный ниже.
- L293D распиновка и работает.
Из приведенного выше руководства вы можете легко понять, как подключить двигатель с помощью контактов Arduino Uno и драйвера двигателя l293d.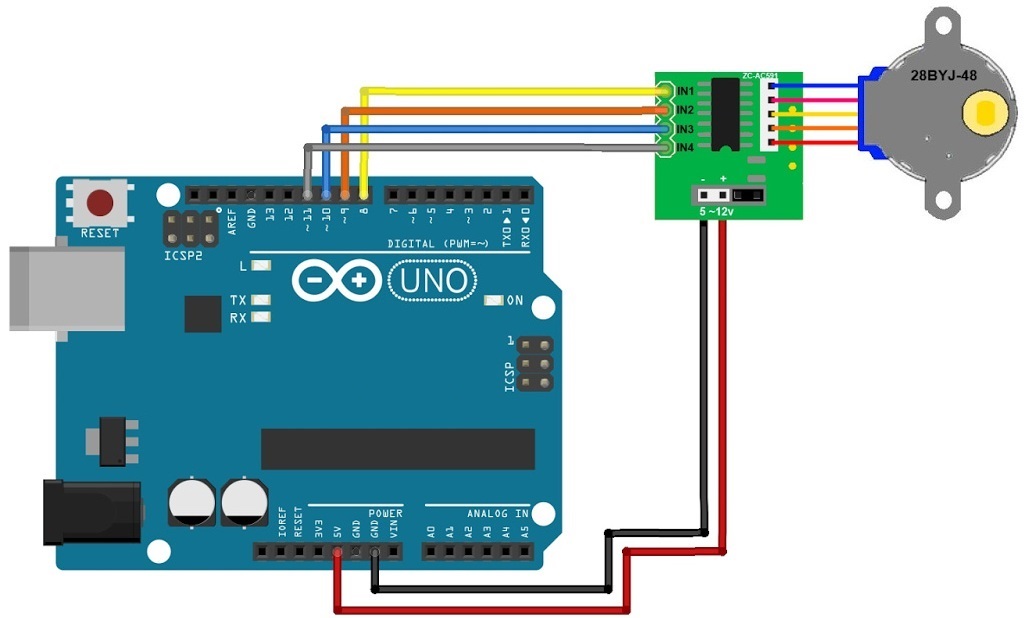 Каждый шаг взаимодействия нагрузки с l293d хорошо объяснен в приведенном выше руководстве.
Каждый шаг взаимодействия нагрузки с l293d хорошо объяснен в приведенном выше руководстве.
Управление двигателем постоянного тока Arduino, драйвер двигателя L293d — двунаправленное управление двигателем — соединения
Я собираюсь использовать канал 1 драйвера двигателя l293d для управления и управления направлением вращения двигателя постоянного тока. Схема цепи проста. Заземление Контакт № 4 и 5 L293D. Подайте +5 вольт на вход Pin#1 l293d. Подайте +12 В на Pin#8 l293d. Arduino digital Pin#7 и 8 используются для управления направлением вращения двигателя. Подключить ардуино цифровой Pin#7 от до pin#7 драйвера двигателя l293d и Pin#8 от до pin#2 l293d. Теперь подключите ваш двигатель к Pin#3 и 6 L293d. Заземление Контакт № 4 и 5 канала l293d-1.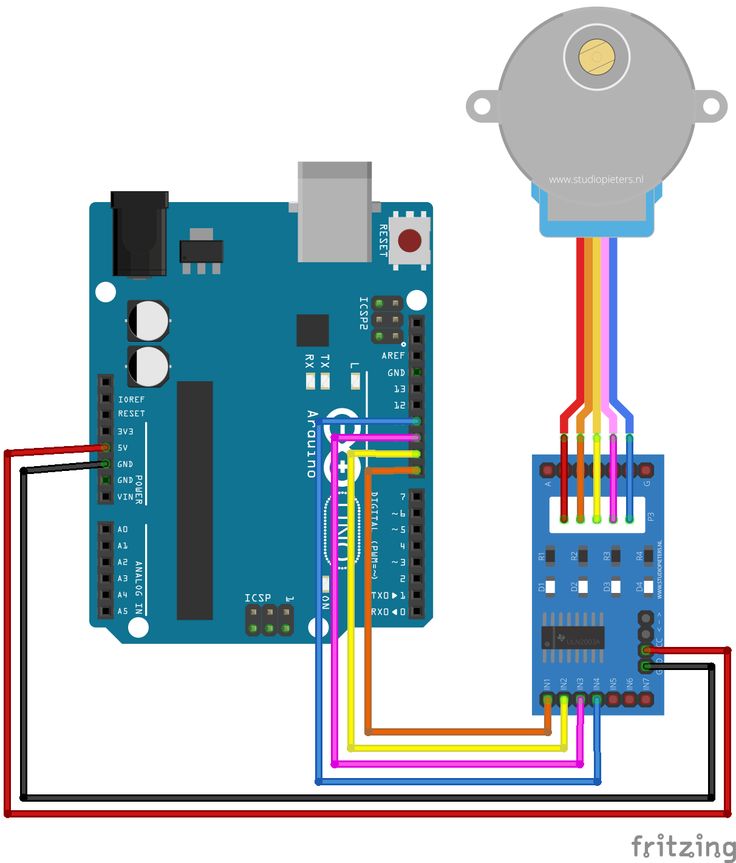 Arduino может питаться от персонального компьютера или USB-порта ноутбука. L293d питается от внешнего источника 12 вольт.
Arduino может питаться от персонального компьютера или USB-порта ноутбука. L293d питается от внешнего источника 12 вольт.
Драйвер двигателя L293d и контроллер с Arduino, управляющей направлением вращения двигателя постоянного тока3). Если вы используете другую сторону, убедитесь, что ваши соединения верны. Примечание. L293D может запускать два двигателя одновременно, вы также можете использовать его для запуска только одного двигателя. Как я сделал!
Драйвер двигателя L293d с двигателем постоянного тока, управляющим Arduino – Код проекта
Код проекта прост. Сначала я определил контакты № 7 и 8. Затем в функции настройки пустоты я определил контакты № 7 и 6 как выходные контакты. Теперь они могут выводить только цифровой сигнал. В функции void loop я делаю все, что нужно для управления направлением.
Сначала я даю задержку на 2 секунды, чтобы сделать схему стабильной. Обратите внимание, что функция arduino void loop такая же, как , в то время как (1) постоянно работает или повторяется.
Затем я сделал Pin # 7 HIGH и Pin # 8 LOW , этот сигнал поступает на L293d Pin # 2 и 7 , что заставило наш двигатель работать по часовой стрелке или против часовой стрелки в зависимости от вашей конфигурации. . Двигатель остается в этом состоянии в течение 4 секунд, после чего меняется состояние контактов.
Теперь оба контакта находятся в состоянии НИЗКИЙ, что означает ноль, который заставляет двигатель останавливаться, и двигатель останавливается на 3 секунды, этот шаг очень важен, потому что теперь мы хотим изменить направление, и если мы изменим его без какой-либо задержки, чем это может быть опасно для нашей цепи и водителя двигателя. когда двигатель вращается, он создает в нем обратную ЭДС (электродвижущая сила), а когда он останавливается, эта ЭДС передается обратно в цепь, что может быть вредным. Вот почему я остановил двигатель на 3 секунды.
Затем я снова вращаю двигатель, но на этот раз в противоположном направлении, установив Pin # 8 HIGH и 7 LOW .
