Как подключить gps модуль к компьютеру
GPS/GLONASS принимает сигналы спутников глобального позиционирования — GPS, GLONASS и Galileo — и рассчитывает свои географические координаты, скорость перемещения, высоту над уровнем моря и точное локальное время.
Данные передаются на управляющую электронику в текстовом формате NMEA по интерфейсу UART.
Спутники непрерывно передают навигационные сигналы на дециметровых волнах. В сигнал входят метки точного времени и координаты самого спутника.
Для работы навигаторов нужно открытое небо с минимум четырьмя спутниками в прямой видимости. Чтобы система работала по всей планете в каждой орбитальной группировке приходится держать более двух десятков спутников.
GPS/GLONASS-модуль общается с управляющей платой по протоколу UART. В зависимости от управляющей платформы выберите вариант подключения GPS-модуля.
На управляющей плате Iskra JS и Arduino платах с микроконтроллером ATmega32U4 / ATSAMD21G18 , данные по USB и общение через пины 0 и 1 осуществляется через два раздельных UART .
Список поддерживаемых плат:
При подключении удобно использовать Troyka Shield.
С Troyka Slot Shield можно обойтись без лишних проводов.
Некоторые платы Arduino, например Arduinio Uno, прошиваются через пины 0 и 1 . Это означает невозможность использовать одновременно прошивку/отладку по USB и общение с GPS-модулем. Решение проблемы — программный UART . Подключите пины TX и RX GPS-модуля к другим контактам управляющей платы и используйте библиотеку SoftwareSerial.
Для примера подключим управляющие пины GPS-модуля TX и RX — на 4 и 5 контакты управляющей платы.
При подключении удобно использовать Troyka Shield.
С Troyka Slot Shield можно обойтись без лишних проводов.
На платах форм-фактора Arduino Mega 2560 аппаратный UART, который отвечает за передачу данных через пины 1 и 0 , отвечает также за передачу по USB.
Но на платах такого форм-фактора есть ещё дополнительно 3 аппаратных UART:
Список поддерживаемых плат:
Подключим GPS-модуль к объекту Serial1 на пины 18 и 19 на примере платы Arduino Mega 2560
Рассмотрим примеры работы GPS-модуля в зависимости от управляющей платформы.
В качестве примера выведем в Serial данные с GPS-модуля. Распарсим строки в отдельные переменные и сохраним их. Для этого скачайте и установите библиотеку TroykaGPS
В отличии от аппаратного UART (HardwareSerial), за работу программного UART (SoftwareSerial) отвечает микроконтроллер, который назначает другие пины в режим работы RX и TX , соответственно и данные которые приходят от модуля GPS обрабатывает сам микроконтроллер во время программы. По умолчанию скорость общения GPS-модуля равна 115200 , что значительно выше чем позволяет библиотека SoftwareSerial. В итоге часть информации которая приходит с GPS-модуля будет утеряна.
Решение понизить скорость общения GPS-модуля с управляющей платой. Из описание команд управления GPS-модулем найдём NMEA-команду понижение скорости до 9600 бод.
Данную команду придётся выполнять при каждом новом включении GPS-модуля. В качестве примера выведем в Serial данные с GPS-модуля. Распарсим строки в отдельные переменные и сохраним их. Для этого скачайте и установите библиотеку TroykaGPS
Выведем данные о координатах, высоте над уровнем моря, количестве видимых спутников и точном времени в консоль Web IDE.
Каждую секунду в консоль будет выводится информация от модуля.
Данные с GPS-модуля передаются на управляющую электронику в текстовом формате NMEA, состоят из последовательного набора данных, разделенных запятыми. Каждое NMEA сообщение начинается с $ , заканчивается \n (перевод строки) и не может быть длиннее 80 символов.
В этом эксперименте рассмотрим работу модуля GPS-приемника, позволяющего определять наше местоположение с помощью глобальной системы GPS, и подключение данного приемника к плате Arduino.
Необходимые компоненты:
GPS (Global Positioning System) – это система, позволяющая с точностью не хуже 100 м определить местоположение объекта, то есть определить его широту, долготу и высоту над уровнем моря, а также направление и скорость его движения. Кроме того, с помощью GPS можно определить время с точностью до 1 наносекунды. GPS состоит из совокупности определенного количества искусственных спутников Земли (спутниковой системы NAVSTAR) и наземных станций слежения, объединенных в общую сеть. В качестве абонентского оборудования служат индивидуальные GPS-приемники, способные принимать сигналы со спутников и по принятой информации вычислять свое местоположение. Мы используем GPS-приемник V.KEL VK16E (см. рис. 33.1).
Рис. 33.1. GPS-приемник V.KEL VK16E
Назначение выводов:
• BOOT – зарезервировано;
• GND – общий вывод;
• RX – вход для данных в последовательном формате UART;
• TX – выход для данных в последовательном формате UART;
• VCC – вход напряжения питания от 3,3 до 5 В;
• PPS – выход импульсов времени.
Холодный старт происходит, когда GPS-приемник был выключен длительное время, перемещался в выключенном состоянии на значительное расстояние или его часы не совпадают с данными спутника. При холодном старте со спутников скачивается альманах. Время обновления альманаха – от 5 до 15 минут в зависимости от условий приема и количества видимых спутников. Особенность – приемник в это время должен быть неподвижен. Теплый старт происходит, когда приемник был выключен более 30 мин. При этом происходит прием уточняющих данных. Занимает 0,5–1,5 мин. Горячий старт происходит, когда приемник был отключен непродолжительное время. Данные считаются свежими, и приемник просто находит спутники (опираясь на данные альманаха). Для проверки работоспособности подключим модуль по последовательному порту к компьютеру с ОС Windows, используя USBTTL- адаптер, и запустим программу MiniGPS_v1.7.1.exe. Программа показывает количество найденных приемником спутников и в случае их достаточного числа показывает наше местоположение – географические широту и долготу (см.
Приступим к написанию скетча. Будем использовать библиотеки SoftwareSerial и TinyGPS, позволяющую выделять нужные данные из всего потока, передаваемого приемником. Содержимое скетча показано в листинге 33.1.
Порядок подключения:
1. Собираем схему, согласно рис. 33.1.
2. Загружаем в плату Arduino скетч из листинга 33.1.
3. Ждем мигания зеленого светодиода на приемнике GPS, сигнализирующего о наличии данных о местоположении.
4. Смотрим в мониторе последовательного порта Arduino вывод данных широты и долготы. Также получаем текущую дату и время по Гринвичу (рис. 33.4).
Если у Вас возникла необходимость подключить к ноутбуку GPS-приемник, чтобы отслеживать свое местоположение, а покупать его не хочется, то в этой статье Вы узнаете, как с таким же успехом можно использовать телефон на Android в качестве такого GPS-приемника.
В Google Play Market можно найти много приложений, предназначенных для передачи координат GPS по Bluetooth, например: GPS over BT, GPS2Bluetooth, Share GPS, Bluetooth GPS Output (платное). Мне больше всего понравился GPS over BT, но если у Вас не получится осуществить передачу данных GPS с помощью этого приложения, попробуйте приложения перечисленные выше.
Перед тем как запускать приложение, выполните следующие предварительные настройки:
- Выполните сопряжение по Bluetooth телефона с ноутбуком.
- Включите опцию GPS в телефоне.
Запустите приложение GPS over BT, приложение автоматически выполнит поиск спутников, определит местоположение и начнет передавать данные подключенному по Bluetooth ноутбуку.
Чтобы увидеть карту спутников, нажмите на кнопку «Меню» телефона и выберите соответствующий пункт.
Настройте виртуальный последовательный порт для Bluetooth-устройства в ноутбуке. Для этого в Windows выполните следующие действия: откройте окно «Устройства и принтеры» (Пуск > Панель управления > Оборудование и звук > Устройства и принтеры), найдите среди подключенных к ноутбуку устройств телефон сопряженный по Bluetooth, нажмите на него правой кнопкой мыши и выберите команду контекстного меню «Свойства».
Затем в окне свойств переключитесь на вкладку «Службы» и поставьте галочку рядом с пунктом «Последовательный порт (SPP)…» и нажмите на кнопку «Применить». После небольшого ожидания Вы увидите номер COM-порта, который в дальнейшем Вам понадобится для подключения приемника GPS в программе навигации для Windows.
Скачайте на ноутбук и установите желаемое приложение для навигации, например: SAS.Планета, Google Earth, 2Gis и т. п. Я предпочитаю SAS.Планета (ее не нужно устанавливать), поэтому ниже будет приведена настройка приемника GPS именно для этой программы.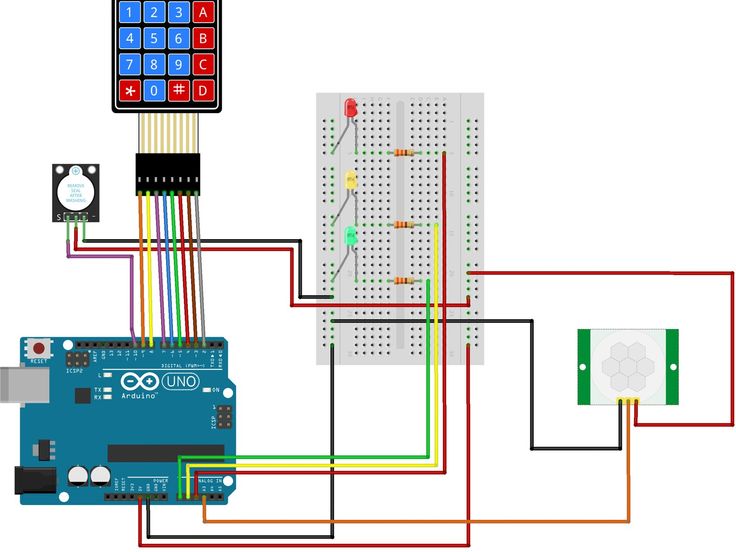 В общих чертах в остальных программах настройка аналогичная.
В общих чертах в остальных программах настройка аналогичная.
Скачайте, распакуйте и запустите программу SAS.Планета. Выберите в окне программы команду «GPS > Настройки».
В открывшемся диалоговом окне «Настройки» на вкладке «GPS» убедитесь что в группе «GPS type» отмечен пункт «COM». В поле «Порт» выберите нужный номер порта, тот, о котором говорилось выше (в моем случае COM8). Скорость можно не трогать, в соответствии с документации при подключении по протоколу NMEA 0183 на скорости 4800 бод/с данные GPS передаются один раз в секунду. Нажмите на кнопку «GPS Вкл/Выкл», затем на кнопки «Применить» и «ОК».
В главном окне программы, на карте должно быть отображено Ваше местоположение, а на панели справа другие подробности (скорость, пройденный путь, высота над уровнем моря, азимут и др.).
Подключение gps модуля к микроконтроллеру
Андроид и управление голосом. Беспилотные летательные аппараты. Поиск по сайту. Практика для студентов.
Беспилотные летательные аппараты. Поиск по сайту. Практика для студентов.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- GPS модуль EB-500 и ATMega
- GPS модуль – подключение к микроконтроллеру
- Малопотребляющий GPS-модуль на чипсете SirfStar III
- GPS модуль с интерфейсом на AVR для радиомаяка
- AVR GPS приемник на микроконтроллере ATmega8
- Передача данных от микроконтроллера на Интернет-сервер по каналам GPRS
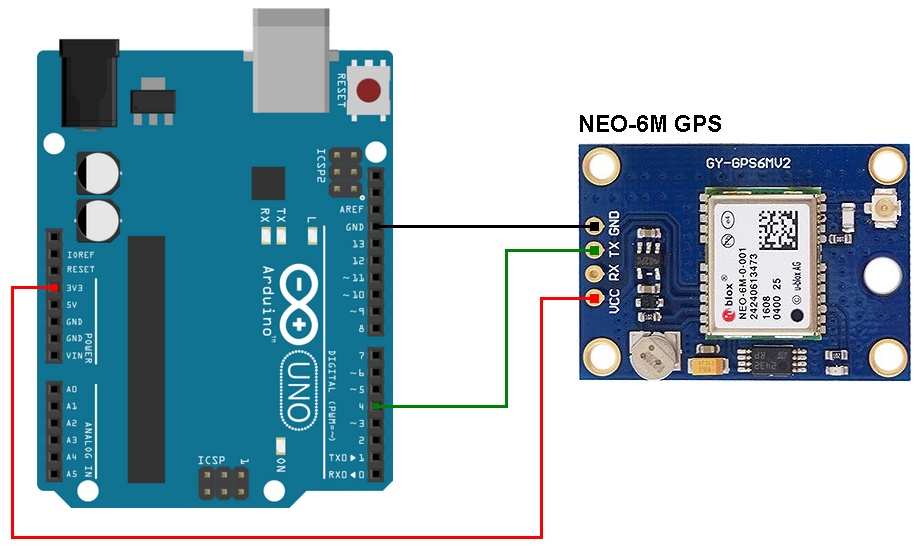
- GPS Модуль.
GYNEO6MV2.
- Навигационный ГЛОНАСС-трекер BM8011
- GPS модуль
- GPS/GLONASS v1 (Troyka-модуль)
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Как подключить GPS-модуль к Arduino. (схема+скетч)
GPS модуль EB-500 и ATMega
Давеча достался мне гпс модуль на халяву Ublox Neo-6M, поэтому срочно разобраться и освоить! Модуль представляет собой готовое решение, которое по сути требует только питания, информация выдается по UART каналу на скорости , поэтому совершенно не важно, что это будет за приемник, будь то микроконтроллер или компьютер, или что то еще. Полученные данные можно смело вбивать в гугль карты и определить свое местоположение.
В принципе, можно было бы прицепить дисплей и выводить на него координаты, но это можно сделать при помощи простого usb-uart переходника, компа и какой нибудь программы обертки. Поэтому задача немного другая — ловим спутники, нажимаем кнопку, чтобы запомнить текущую координату, если мы вне радиуса действия текущей координаты, то гасим светодиод, если рядом то зажигаем.
Идея не моя, но мне она показалась интересной, например можно управлять какой нибудь машинкой или квадрокоптером, соответственно это будет часть алгоритма. Перейдем к сути решения. Сама схема примитивная, от модуля один проводок Tx. Единственное не забываем, что модулю нужно 3. Самое сложное в этом девайсе это парсинг данных.
Данные передаются в виде сообщений один раз в секунду, в соответствии с протоколом NMEA Существует много реализаций, но мне хотелось написать свою. Как только строка целиком готова. Если нет, то снова ищем старт байт. Следующая проверка это наличие достоверных данных, так как у нас в сообщении какие то данные могут быть, а каких то может не быть, то единственным ориентиром могут быть запятые, разделяющие данные.
Сделано в виде функции, возвращающей ноль в случае достоверных данных, единицу если данные не достоверны. Поиск данных координат организован по такому же принципу, передаем в функцию pos, то есть номер запятой после, которой идут интересующие нас данные. Данные записываем целую часть в один массив, дробную часть в другой массив. Возвращаем количество цифр целой части, ибо широта передается 4 символами, долгота 5 символами.
Далее по нажатию кнопки записываем текущие координаты, а в следующий заход их сравниваем. Есть специальная софтина Ublox — u-center, которая соединяется с модулем и выводит на экран и координаты, и графики всякие, и время, и все остальное.
Добрый вечер. У меня вопрос если модуль поймал 3 спутника : дату правильно показывает а вот время почти на 5 часов отличается как это понять??? Ваш e-mail не будет опубликован.
Поиск по сайту. Урок 1. Первый проект Урок 2. Управление кнопками Урок 3. Подключение LCD Урок 4. Использование ШИМ Урок 5. Таймеры Урок 6. Статическая индикация Урок 6. Динамическая индикация Урок 7. Генерация звука Урок 7. Генерация звука. Продолжение Урок 8. Передача данных через UART. Передача данных через SPI Урок Изучение АЦП. Простой вольтметр Урок Получение синуса при помощи ШИМ Урок Измерение температуры Урок Внешние прерывания. Урок Использование отладчика Урок Управление инкрементальным энкодером Урок Управление громкостью, при помощи энкодера Урок Управление RGB светодиодом Урок Использование ИК Урок Знакомство с графическим дисплеем Урок Опрос матричной клавиатуры Урок Сторожевой таймер Урок Цифровой резистор AD Тестирование GPS модуля.
Статическая индикация Урок 6. Динамическая индикация Урок 7. Генерация звука Урок 7. Генерация звука. Продолжение Урок 8. Передача данных через UART. Передача данных через SPI Урок Изучение АЦП. Простой вольтметр Урок Получение синуса при помощи ШИМ Урок Измерение температуры Урок Внешние прерывания. Урок Использование отладчика Урок Управление инкрементальным энкодером Урок Управление громкостью, при помощи энкодера Урок Управление RGB светодиодом Урок Использование ИК Урок Знакомство с графическим дисплеем Урок Опрос матричной клавиатуры Урок Сторожевой таймер Урок Цифровой резистор AD Тестирование GPS модуля.
Дим on Руслан on Спасибо, поправил. Алексей on Руслан, у Вас тоже. Валентин on Валерий on Да время то по Гринвичу и из за это почти на 5 часов отличается.
Добавить комментарий Отменить ответ Ваш e-mail не будет опубликован. Свежие записи. Установка и запуск NodeJs на Raspberry Последние комментарии.
GPS модуль – подключение к микроконтроллеру
Спутники непрерывно передают навигационные сигналы на дециметровых волнах. В сигнал входят метки точного времени и координаты самого спутника. Навигатор, по задержке прохождения сигнала со спутника рассчитывает точное расстояние до него. Затем повторяет эту операцию для остальных известных спутников. Эти данные сводятся вместе — так получается точное значение координат приёмника. Для работы навигаторов нужно открытое небо с минимум четырьмя спутниками в прямой видимости. Чтобы система работала по всей планете в каждой орбитальной группировке приходится держать более двух десятков спутников.
В сигнал входят метки точного времени и координаты самого спутника. Навигатор, по задержке прохождения сигнала со спутника рассчитывает точное расстояние до него. Затем повторяет эту операцию для остальных известных спутников. Эти данные сводятся вместе — так получается точное значение координат приёмника. Для работы навигаторов нужно открытое небо с минимум четырьмя спутниками в прямой видимости. Чтобы система работала по всей планете в каждой орбитальной группировке приходится держать более двух десятков спутников.
GPS модуль – подключение к микроконтроллеру В этой статье я расскажу про подключение GPS приемника к микроконтроллеру, на примере модуля.
Малопотребляющий GPS-модуль на чипсете SirfStar III
GPS Global Positioning System, Глобальная система позиционирования — Спутниковая навигационная система, определяющая положение объектов в пространстве согласно всемирной системе координат. В настоящее время эта система доступна практически в каждом мобильном устройстве, и готовые к использованию с микроконтроллерами модули GPS также дешевы и распространены. Именно об одном из таких модулей сейчас и пойдет речь. Но, для начала, кратко опишу процесс работы GPS. Возможность использования GPS нам открывают спутники, вращающиеся на околоземной орбите. Эти спутники с определенной частотой посылают на землю радиосигналы. В данном радиосигнале закодированы координаты самого спутника, время отправки, данные поправки, и другие технические параметры. Зная расстояния до спутников, используя геометрические преобразования, можно найти положение объекта в пространстве. Для определения координат на плоскости то есть широты и долготы , достаточно получить данные с 3 спутников, а для определения положения в 3D пространстве необходимы данные уже 4 спутников.
Именно об одном из таких модулей сейчас и пойдет речь. Но, для начала, кратко опишу процесс работы GPS. Возможность использования GPS нам открывают спутники, вращающиеся на околоземной орбите. Эти спутники с определенной частотой посылают на землю радиосигналы. В данном радиосигнале закодированы координаты самого спутника, время отправки, данные поправки, и другие технические параметры. Зная расстояния до спутников, используя геометрические преобразования, можно найти положение объекта в пространстве. Для определения координат на плоскости то есть широты и долготы , достаточно получить данные с 3 спутников, а для определения положения в 3D пространстве необходимы данные уже 4 спутников.
GPS модуль с интерфейсом на AVR для радиомаяка
Приемник имеет память на точек. В память могут быть занесены координаты точки, определяемые приемником в данный момент времени, а так же предусмотрена возможность записывать в память приемника координаты точек с географических карт. С помощью приемника можно определять расстояние и истинный не путать с магнитным азимут от точки, в которой находится приемник, до любой точки, выбранной из его памяти. Модуль ЕВ прекрасно подходит для мобильных приложений, так как имеет небольшие габариты и малое потребление тока.
Модуль ЕВ прекрасно подходит для мобильных приложений, так как имеет небольшие габариты и малое потребление тока.
Система тактирования микроконтроллера работает с кварцевым резонатором ZQ2 16 МГц, при этом максимальная тактовая частота может достигать 72 МГц. Линии PC7, PC8 и PC9 управляют красным, зеленым и желтым светодиодами и могут быть использованы для индикации различных состояний устройства.
AVR GPS приемник на микроконтроллере ATmega8
English Help. By continuing to browse, you consent to our use of cookies. You can read our Cookies Policy here. Группа радиолюбителя. Рентген аппарат в домашних условиях! В ролике продемонстрирован принцип действия рентгеновского аппарата, а также способ получения рентгеновских снимков.
Передача данных от микроконтроллера на Интернет-сервер по каналам GPRS
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку. Если Вы купили что-то полезное, то, пожалуйста, поделитесь информацией с другими. Также у нас есть DIY сообщество , где приветствуются обзоры вещей, сделанных своими руками. Идеальный номер два? Прикосновение к символу эпохи. Добавь огонька в тортик. Внедряю в павербанк.
Также у нас есть DIY сообщество , где приветствуются обзоры вещей, сделанных своими руками. Идеальный номер два? Прикосновение к символу эпохи. Добавь огонька в тортик. Внедряю в павербанк.
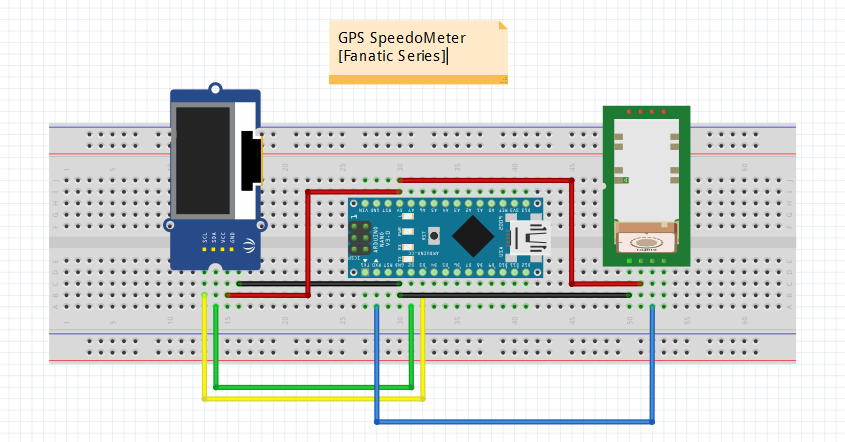
Используя информацию о распиновке отобразим схему подключения микроконтроллера STM32FC8, GPS-модуля и LCD-дисплея.
GPS Модуль.GYNEO6MV2.
GPS-модуль расширяет возможности Arduino, позволяя определять местоположение устройства. Модуль реализован посредством стандартного протокола передачи данных позиционирования NMEA через последовательный порт. GPS-модуль определяет географические координаты, высоту над уровнем моря, скорость перемещения, дату и время UTC.
Навигационный ГЛОНАСС-трекер BM8011
GPS навигация все более и более проникает в массы, я не стал в этом исключением. Два года назад купил себе GPS модуль Lassen iQ от Trimble и активную антенну для него, хотел поиграться с космическими технологиями, но не вышло. На самом модуле был нестандартный и неудобный для соединения разъем с шагом 1,27мм, также питание было 3. В общем, мне тогда не удалось выжать никаких данных с модуля и я подумал что он паленый. Недели две назад все-таки достал его из загашника, подключил к логическому анализатору. На дисплее компьютера увидел, что модуль очень даже живой и исправно выдает данные.
В общем, мне тогда не удалось выжать никаких данных с модуля и я подумал что он паленый. Недели две назад все-таки достал его из загашника, подключил к логическому анализатору. На дисплее компьютера увидел, что модуль очень даже живой и исправно выдает данные.
Приемник представляет из себя небольшую плату на которой расположены модуль NEO-6M, стабилизатор напряжения 3. Модуль продается вместе с активной антенной квадратной формы.
GPS модуль
Устройство GPS получает координаты от спутника каждую секунду с указанием времени и даты. GPS обеспечивает большую точность, а также предоставляет другие данные помимо координат положения. Все мы знаем, что GPS является очень полезным средством и очень часто используется в мобильных телефонах и других портативных устройствах для отслеживания местоположения. Он имеет очень широкий спектр применений в любой области: от вызова такси до отслеживания высоты полета самолетов. В этом примере мы свяжем микроконтроллер STM32 с GPS-модулем для получения координат, что можно использовать в различных проектах геопозиционирования. Формат NMEA состоит из нескольких предложений, в которых нам нужно только одно предложение. GPGGA относится к данным коррекции системы глобального позиционирования.
Формат NMEA состоит из нескольких предложений, в которых нам нужно только одно предложение. GPGGA относится к данным коррекции системы глобального позиционирования.
GPS/GLONASS v1 (Troyka-модуль)
В данной работе описано подключение GPS модуля к микроконтроллеру. Ключевые слова: микроконтроллер, GPS модуль, алгоритм. This article describes a connection of GPS module to a microcontroller.
GPS Взаимодействие с Arduino Uno
GPS — это очень полезное устройство, которое используется во многих электронных проектах и приложениях, таких как система слежения за транспортными средствами, GPS-часы, система оповещения об обнаружении аварий, система навигации и наблюдения за дорожным движением и т. д. Но вопрос в том, как использовать GPS и считать данные с GPS ? Мы можем легко получить данные GPS прямо на наш компьютер с помощью Arduino.
GPS означает глобальную систему позиционирования и используется для определения широты и долготы любого места на Земле с точным временем UTC (всемирное скоординированное время). Это устройство получает координаты со спутника за каждую секунду, со временем и датой. GPS обеспечивает высокую точность, а также предоставляет другие данные, помимо координат положения, которые мы рассмотрим в ближайшее время.
Это устройство получает координаты со спутника за каждую секунду, со временем и датой. GPS обеспечивает высокую точность, а также предоставляет другие данные, помимо координат положения, которые мы рассмотрим в ближайшее время.
В этом учебнике arduino GPS мы собираемся объяснить, как протестировать или подключить модуль GPS с помощью компьютера и Arduino . Для сопряжения GSM с компьютером нам нужен преобразователь USB в последовательный порт или плата Arduino. Здесь мы используем плату Arduino для интерфейса GPS. Нам понадобится только плата Arduino , модуль GPS, компьютер и адаптер 12v/3.3v для питания. Здесь мы использовали модуль GPS-приемника SKG13BL (показан на рисунке выше).
Прежде чем подключить его к компьютеру, нам сначала нужно удалить Arduino IC (чип Atmega) с платы Arduino, так как нам нужна только последовательная схема Arduino. Это называется режимом шлюза. Удаление микросхемы показано на рисунках ниже:
Удаление микросхемы показано на рисунках ниже:
Теперь выполните подключение, как показано на рисунке ниже:
- Контакт GPS TX к цифровому контакту 1 Arduino (TXD)
- Контакт заземления GPS к контакту заземления Arduino
- Питание GPS (3,3 В) Pin на 3,3 В PIN Arduino
После подключения подключите USB-кабель к компьютеру, откройте программное обеспечение Arduino IDE на компьютере, выберите COM-порт и откройте последовательный монитор для прослушивания последовательного порта и включите Arduino и модуль GPS.
Теперь вы увидите данные GPS в окне последовательного монитора Arduino, как показано ниже. Ниже приведены два снимка: первый — когда GPS не в зоне действия, а второй — когда GPS в зоне действия.
Данные GPS, когда приемник GPS находится вне зоны действия:
Данные GPS, когда приемник GPS находится в зоне действия:
. Это предложения NMEA. GPS-модуль отправляет данные о местоположении в режиме реального времени в формате NMEA (см. скриншот выше). Формат NMEA состоит из нескольких предложений, четыре важных из которых приведены ниже. Более подробную информацию о предложении NMEA и его формате данных можно найти здесь.
Это предложения NMEA. GPS-модуль отправляет данные о местоположении в режиме реального времени в формате NMEA (см. скриншот выше). Формат NMEA состоит из нескольких предложений, четыре важных из которых приведены ниже. Более подробную информацию о предложении NMEA и его формате данных можно найти здесь.
- $GPGGA: Исправление данных глобальной системы позиционирования
- $GPGSV: спутники GPS в поле зрения
- $GPGSA: GPS DOP и активные спутники
- $GPRMC: рекомендуемый минимум специальных данных GPS/Transit
Эти строки содержат множество параметров GPS, таких как: время, дата, долгота, широта, скорость, №. количество используемых спутников, высота над уровнем моря и многое другое.
Для любых координат местоположения и времени мы можем использовать $GPGGA и $GPRMC.
Для даты и времени мы можем использовать строку $GPRMC.
Когда мы используем модуль GPS для отслеживания любого местоположения, нам нужны только координаты, и мы можем найти их в строке $GPGGA .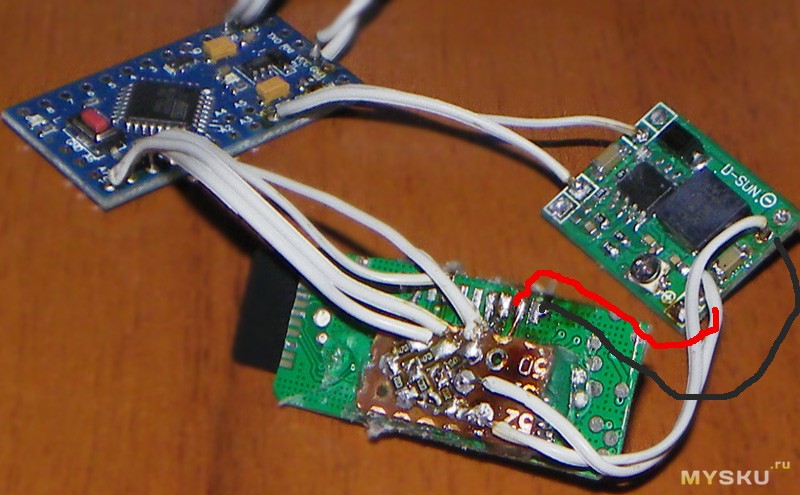 В программах в основном используется только строка $GPGGA (данные глобальной системы позиционирования), а другие строки игнорируются. Эта строка состоит из данных исправления, как показано ниже:
В программах в основном используется только строка $GPGGA (данные глобальной системы позиционирования), а другие строки игнорируются. Эта строка состоит из данных исправления, как показано ниже:
$GPGGA,104534.000,7791.0381,N,06727.4434,E,1,08,0.9,510.4,M,43.9,M,*47 $GPGGA,HHMMSS.SSS,широта,N,долгота,E,FQ,NOS,HDP,высота,M,высота,M,данные контрольной суммы
|
Идентификатор |
Описание |
|
$GPGGA |
Данные исправления системы глобального позиционирования |
|
ЧЧММСС.ССС |
Время в формате часов, минут, секунд и миллисекунд. |
|
Широта |
Широта (координата) |
|
№ |
Направление N=север, S=юг |
|
Долгота |
Долгота (координата) |
|
Е |
Направление E= Восток, W=Запад |
|
FQ |
Исправление данных о качестве |
|
Н. |
Количество используемых спутников |
|
HDP |
Горизонтальное снижение точности |
|
Высота над уровнем моря |
Высота над уровнем моря (метры над уровнем моря) |
|
М |
Счетчик |
|
Высота |
Высота |
|
Контрольная сумма |
Данные контрольной суммы |
 У.К.
У.К.
И Строка $GPRMC в основном содержит скорость, время, дату и положение
$GPRMC,123519.000,A, 7791.0381,N, 06727.4434,E,022.4,084.4,230394,003.1,W*6A $GPRMC,HHMMSS.SSS,A,широта,N,долгота,E,скорость,угол,дата,MV,W,CMD
|
Идентификатор |
Описание |
|
РМЦ |
Рекомендуемое минимальное предложение C |
|
ЧЧММСС. |
Время в формате часов, минут, секунд и миллисекунд. |
|
А |
Состояние // A=активно и V=недействительно |
|
Широта |
Широта 49 град. 16.45 мин. Север |
|
Н |
Направление N=север, S=юг |
|
Долгота |
Долгота (координата) |
|
Е |
Направление E= Восток, W=Запад |
|
Скорость |
скорость в узлах |
|
Угол |
Угол слежения в градусах |
|
Дата |
Отметка времени (дата в формате UTC) |
|
МВ |
Магнитное изменение |
|
Вт |
Направление изменения E/W |
|
CMD (*6А) |
Данные контрольной суммы |
 ССС
ССС В основном эта строка используется для определения времени, даты и скорости.
Прямая компьютерная проводка | Adafruit Ultimate GPS
Сохранить Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
GPS-модулихороши тем, что в тот момент, когда вы их включаете, они начинают выдавать данные и пытаются получить «исправление» (подтверждение местоположения). Как и почти все существующие GPS, Adafruit Ultimate GPS использует последовательный выход TTL для отправки данных, поэтому лучший способ сначала протестировать GPS — подключить его напрямую к компьютеру через преобразователь последовательного TTL в USB на Arduino. Вы также можете использовать FTDI Friend или другой адаптер TTL, но для этой демонстрации мы будем использовать классический Arduino.
Этот обучающий шаг не будет работать с чипом, у которого есть NATIVE USB — он только для совместимости с Arduino UNO.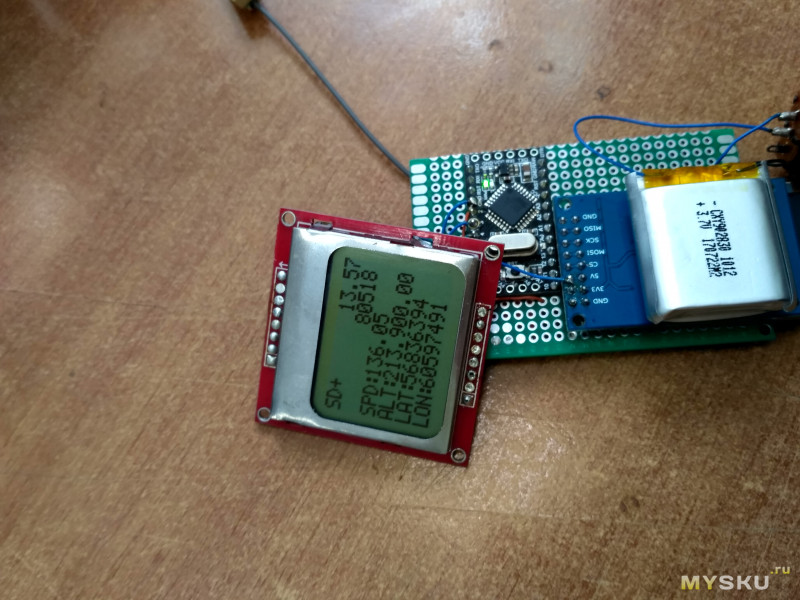 Перейдите к следующему шагу, «Проводка Arduino», но вернитесь сюда для обсуждения данных GPS!
Перейдите к следующему шагу, «Проводка Arduino», но вернитесь сюда для обсуждения данных GPS!
Сначала загрузите в Arduino «пустой» скетч:
// этот скетч позволит вам обойти чип Atmega
// и подключите Ultimate GPS напрямую к USB/последовательному порту
// преобразователь микросхем.
// Подключаем VIN к +5В
// Соединить GND с землей
// Подключить GPS RX (данные в GPS) к цифровому 0
// Подключите GPS TX (данные из GPS) к цифровому 1
недействительная установка () {}
недействительный цикл () {} Это освободит преобразователь, чтобы вы могли напрямую подключить и обойти микросхему Arduino. После того, как вы загрузили этот эскиз, подключите GPS следующим образом. Ваш модуль может выглядеть немного иначе, но если вы подключаетесь к контактам с правильными именами, все они работают одинаково для этой части
Теперь подключите USB-кабель, откройте последовательный монитор из Arduino IDE и обязательно выберите 9600 бод в раскрывающемся списке. Вы должны увидеть текст, подобный следующему:
Вы должны увидеть текст, подобный следующему:
Это необработанный вывод GPS «предложения NMEA» из модуля. Существует несколько различных типов предложений NMEA, наиболее распространенными из которых являются $GPRMC ( G локальный P позиционный R рекомендуемый M минимальный C координаты или что-то в этом роде). $GPGGA предложений. Эти два обеспечивают время, дату, широту, долготу, высоту, расчетную путевую скорость и тип исправления. Тип фиксации указывает, зафиксировалась ли система GPS на спутниковых данных и получила достаточно данных для определения местоположения (2D-исправление) или местоположения+высоты (3D-исправление).
Для получения более подробной информации о предложениях NMEA и о том, какие данные они содержат, посетите этот сайт
Если вы посмотрите на данные в приведенном выше окне, вы увидите, что есть много запятых, между которыми нет данных. Это потому, что этот модуль стоит у меня на столе в помещении и не имеет «исправления». Чтобы получить исправление, нам нужно поместить модуль снаружи.
Это потому, что этот модуль стоит у меня на столе в помещении и не имеет «исправления». Чтобы получить исправление, нам нужно поместить модуль снаружи.
Модули GPS всегда будут отправлять данные, ДАЖЕ ЕСЛИ У НИХ НЕТ ИСПРАВЛЕНИЯ! Чтобы получить «достоверные» (не пустые) данные, вы должны иметь модуль GPS прямо снаружи, с квадратной керамической антенной, направленной вверх с видом на ясное небо. В идеальных условиях модуль может исправить ошибку менее чем за 45 секунд. однако, в зависимости от вашего местоположения, конфигурации спутников, солнечных вспышек, высоких зданий поблизости, радиопомех и т. д., на исправление может уйти до получаса (или больше)! Это не означает, что ваш модуль GPS неисправен, модуль GPS всегда будет работать настолько быстро, насколько это возможно, чтобы исправить проблему.
Если вы можете получить действительно длинный USB-кабель (или прикрепить GPS-антенну к модулям v3) и высунуть GPS из окна, чтобы он указывал на небо, в конечном итоге GPS получит исправление, и данные окна изменятся. для передачи действительных данных, например:
для передачи действительных данных, например:
Найдите строку с текстом $GPRMC,194509.000,A,4042.6142,N,07400.4168,W,2.03,221.11,160412,A*77
много всех самых полезных данных. Каждый фрагмент данных отделяется запятой.
Первая часть 194509.000 — это текущее время GMT (время по Гринвичу). Первые два числа 19 обозначают час (19:00, иначе известный как 19:00), следующие два — минуты, следующие два — секунды и, наконец, миллисекунды. Таким образом, время, когда был сделан этот снимок экрана, составляет 19:45 и 9 секунд. GPS не знает, в каком часовом поясе вы находитесь, или о «летнем времени», поэтому вам придется сделать расчет, чтобы перевести GMT в ваш часовой пояс
Вторая часть — это «код состояния». Если это V , это означает, что данные V oid (недействительны). Если это A , это означает, что активен A (GPS может получить блокировку/исправление)
Следующие 4 элемента данных — это данные геолокации.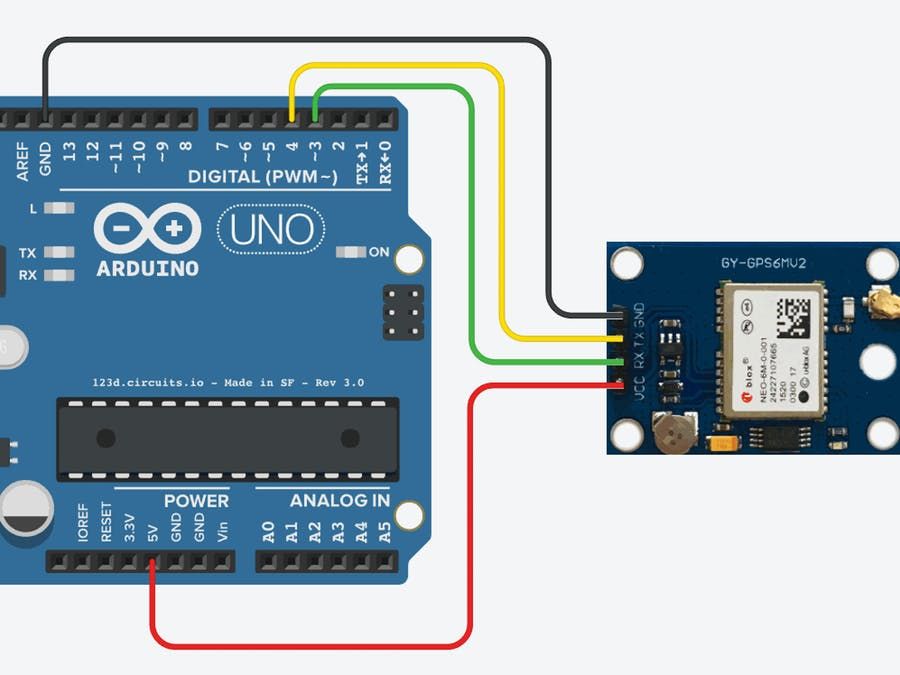 Согласно GPS, мое местоположение: 4042.6142,N (широта 40 градусов, 42,6142 десятичных минуты северной широты) & 07400,4168,W . (74 градуса долготы, 0,4168 десятичной минуты западной долготы). Чтобы найти это место на картах Google, введите +40 42,6142′, -74 00,4168′ в поле поиска Google Maps. К сожалению, gmaps требует, чтобы вы использовали +/- вместо нотации NSWE. N и E положительные, S и W отрицательные.
Согласно GPS, мое местоположение: 4042.6142,N (широта 40 градусов, 42,6142 десятичных минуты северной широты) & 07400,4168,W . (74 градуса долготы, 0,4168 десятичной минуты западной долготы). Чтобы найти это место на картах Google, введите +40 42,6142′, -74 00,4168′ в поле поиска Google Maps. К сожалению, gmaps требует, чтобы вы использовали +/- вместо нотации NSWE. N и E положительные, S и W отрицательные.
Люди часто путаются, потому что GPS работает, но находится «в 5 милях от него» — это потому, что они неправильно анализируют данные широты и долготы. Несмотря на внешний вид, данные геолокации НЕ представлены в десятичных градусах. Она указывается в градусах и минутах в следующем формате: Широта: ДДММ.ММММ (Первые два символа — градусы.) Долгота: ДДДММ.ММММ (Первые три символа — градусы.)
Следующие данные — скорость хода в узлах. Мы идем 2,03 узлов
После этого идет угол слежения, он предназначен для приблизительного определения направления по компасу, в котором мы движемся, исходя из нашего прошлого путешествия
текущая дата (16 апреля 2012 г.