Как правильно подключить драйвер L298N к Arduino. Какие выводы Arduino нужно использовать для управления двигателями через L298N. Как настроить и запрограммировать работу драйвера L298N с Arduino.
Что такое драйвер двигателя L298N
Драйвер двигателя L298N представляет собой плату на основе микросхемы L298N, которая позволяет управлять двумя электродвигателями постоянного тока или одним шаговым двигателем. Основные характеристики драйвера L298N:
- Управление двумя DC моторами или одним шаговым двигателем
- Рабочее напряжение: 5-35В
- Максимальный ток: 2А на канал
- Логические уровни: 5В
- Встроенный стабилизатор напряжения 5В
Драйвер L298N позволяет не только включать и выключать двигатели, но и регулировать скорость вращения, а также менять направление вращения. Это делает его отличным выбором для управления моторами в различных робототехнических проектах на базе Arduino.
Схема подключения L298N к Arduino
Для подключения драйвера L298N к Arduino необходимо соединить следующие выводы:
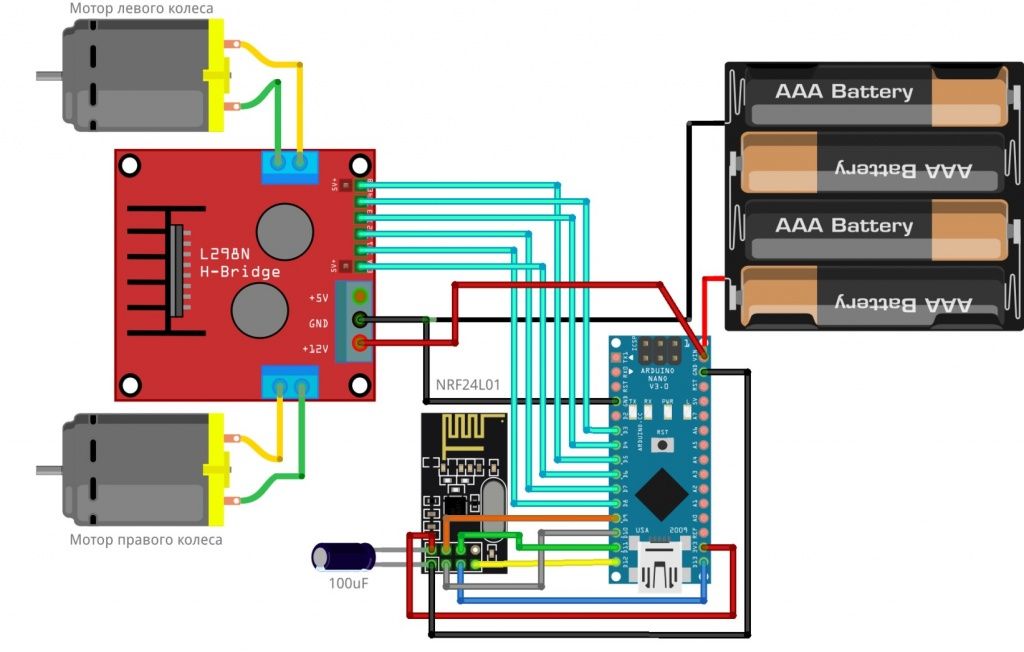
- ENA — подключаем к выводу Arduino с поддержкой ШИМ (например, 9)
- IN1 — к любому цифровому выводу Arduino (например, 8)
- IN2 — к любому цифровому выводу Arduino (например, 7)
- IN3 — к любому цифровому выводу Arduino (например, 6)
- IN4 — к любому цифровому выводу Arduino (например, 5)
- ENB — подключаем к выводу Arduino с поддержкой ШИМ (например, 3)
- 5V — к выводу 5V Arduino (если используется встроенный стабилизатор)
- GND — к выводу GND Arduino
Двигатели подключаются к выводам OUT1, OUT2, OUT3 и OUT4 драйвера L298N. Питание подается на клеммы +12V и GND.
Настройка и инициализация драйвера L298N в скетче Arduino
Для работы с драйвером L298N в скетче Arduino необходимо выполнить следующую инициализацию:
// Определение выводов
const int ENA = 9;
const int IN1 = 8;
const int IN2 = 7;
const int IN3 = 6;
const int IN4 = 5;
const int ENB = 3;
void setup() {
// Настройка выводов на выход
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENB, OUTPUT);
}
Теперь драйвер L298N готов к использованию для управления подключенными двигателями.
Управление скоростью вращения двигателей
Для управления скоростью вращения двигателей через драйвер L298N используются выводы ENA и ENB. На них подается ШИМ-сигнал, который регулирует скорость:
// Установка скорости для двигателя A
analogWrite(ENA, 200); // Значение от 0 до 255
// Установка скорости для двигателя B
analogWrite(ENB, 150); // Значение от 0 до 255
Чем больше значение (от 0 до 255), тем выше скорость вращения двигателя. При значении 0 двигатель останавливается, при 255 — вращается на максимальной скорости.
Управление направлением вращения двигателей
Направление вращения двигателей задается с помощью выводов IN1, IN2, IN3 и IN4. Вот как можно управлять направлением:
// Вращение двигателя A вперед
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
// Вращение двигателя A назад
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
// Вращение двигателя B вперед
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
// Вращение двигателя B назад
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
Изменяя комбинации сигналов на этих выводах, можно менять направление вращения каждого из двигателей независимо.
Пример программы для управления двигателями через L298N
Вот пример скетча Arduino, демонстрирующего управление двумя двигателями с помощью драйвера L298N:
const int ENA = 9;
const int IN1 = 8;
const int IN2 = 7;
const int IN3 = 6;
const int IN4 = 5;
const int ENB = 3;
void setup() {
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENB, OUTPUT);
}
void loop() {
// Вращение двигателя A вперед
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, 200);
// Вращение двигателя B назад
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, 150);
delay(2000);
// Смена направления
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(2000);
}
Этот скетч заставляет двигатель А вращаться вперед, а двигатель B — назад в течение 2 секунд, затем меняет направление вращения обоих двигателей на противоположное еще на 2 секунды. Цикл повторяется бесконечно.

Подключение шагового двигателя к L298N
Драйвер L298N также можно использовать для управления биполярным шаговым двигателем. Для этого обмотки шагового двигателя подключаются следующим образом:
- Обмотка A+ к выводу OUT1
- Обмотка A- к выводу OUT2
- Обмотка B+ к выводу OUT3
- Обмотка B- к выводу OUT4
Управление шаговым двигателем осуществляется путем подачи определенных комбинаций сигналов на выводы IN1, IN2, IN3 и IN4 драйвера L298N. Для этого удобно использовать специализированные библиотеки Arduino для работы с шаговыми двигателями.
Советы по использованию драйвера L298N
При работе с драйвером L298N следует учитывать несколько важных моментов:
- Не превышайте максимально допустимый ток 2А на канал
- Используйте радиатор охлаждения при работе с высокими токами
- Подключайте общий провод (GND) Arduino и источника питания двигателей
- При использовании высоковольтных двигателей (>12В) отключайте встроенный стабилизатор 5В
- Для плавного изменения скорости используйте функцию analogWrite()
- Добавьте защитные диоды, если управляете индуктивной нагрузкой
Соблюдение этих рекомендаций поможет обеспечить надежную и безопасную работу драйвера L298N в вашем проекте.
Заключение
Драйвер двигателя L298N является мощным и универсальным инструментом для управления электродвигателями в проектах на базе Arduino. Правильное подключение и использование этого модуля позволяет легко контролировать скорость и направление вращения двигателей, что открывает широкие возможности для создания различных подвижных робототехнических устройств.
Драйвер RKP-MDL298-01B двухканальный на микросхеме L298N
Статья о двухканальном драйвере моторов RKP-MDL298-01B на микросхеме L298N.
Подключение к плате Ардуино, подключение моторов постоянного тока (DC-моторов) и шагового двигателя.
С помощью драйвера моторов RKP-MDL298-01B можно контролировать вращение двух независимых коллекторных моторов постоянного тока (DC-моторов) или одного двухобмоточного четырехпроводного шагового двигателя.
Модуль управления моторами используется для создания различных робототехнических проектов Arduino (Ардуино), в том числе для построения движущихся роботов на колесном или гусеничном приводе.
Схема подключения драйвера моторов RKP-MDL298-01B к контроллеру Arduino (Ардуино) на Рис. 1.
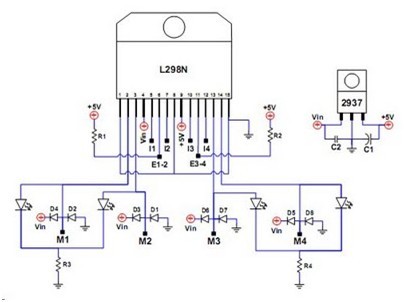
Рис. 1Плата построена на основе микросхемы L298N.
Посмотреть даташит микросхемы драйвера моторов L298N (формат PDF размер 611 КБ) Что позволяет легко управлять двумя электромоторами использующими питание от 5В до 30В. Установленный на основную микросхему L298N радиатор охлаждения позволяет выдерживать ток нагрузки до 2A на канал. Для защиты драйвера моторов от перегрузки используются специальные диоды Шоттки (Schottky diode). Модуль контроллера двигателей RKP-01B используется в различных робототехнических проектах, в том числе для построения движущихся роботов на колесном или гусеничном приводе.
Для защиты драйвера моторов от перегрузки используются специальные диоды Шоттки (Schottky diode). Модуль контроллера двигателей RKP-01B используется в различных робототехнических проектах, в том числе для построения движущихся роботов на колесном или гусеничном приводе.
Для гальванической развязки силовой части драйвера моторов RKP-MDL298-01B использован четырех канальный оптрон TLP521-4 в корпусе DIP-16 по четыре оптрона в каждом.
Рис. 2Технические характеристики TLP521-4
— Тип оптопары: фототранзистор
— Напряжение изоляции: 2.5 кВ
— Максимальный прямой ток: 50 мА
— Максимальное выходное напряжение: 55 В
— Время включения/выключения: 3 нс
— Тип корпуса: DIP16
Конфигурация выводов оптопары TLP521-4 на Рис. 3.
1, 3, 5, 7 — Анод (Anode)
2, 4, 6, 8 — Катод (Cathode)
9, 11, 13, 15 — Эмиттер (Emitter)
10, 12, 14, 16 — Коллектор (Collector)
Фототранзисторные оптопары расположенные внутри микросхемы TLP521-4 изготовлены фирмой Toshiba Semiconductor и состоят из фототранзисторов, оптически соединенных внутри корпуса через арсенид галлия с инфракрасным диодом который испускает свечение.
Оптрон на микросхеме TLP521-4 обеспечивает четыре изолированных независимых канала (DIP корпус микросхемы с шестнадцатью выводами установлен на колодке для быстрой замены при необходимости).
Четырехканальная фототранзисторная оптопара на микросхеме TLP521-4 служит для гальванической развязки силовой части управления шаговым двигателем от микроконтроллера.
Для обеспечения стабилизированного напряжения положительной полярности 5V (при токе до 1A) на плате драйвера моторов RKP-MDL298-01B размещен линейный стабилизатор напряжения на чипе LM7805.
Стабилизатор LM7805 предназначен для обеспечения напряжения +5V, чтобы запитать как внутреннюю часть схемы управления драйвера моторов так и внешние цепи управления, например, непосредственно микроконтроллер MCU. Таким образом, возможно подать на плату регулятора моторов RKP-MDL298-01B любое не стабилизированное напряжение в диапазоне от 7.5V до 20V и получить в результате независимое управление двумя коллекторными моторами, а также стабилизированное напряжение 5V для питания внешней управляющей части вашего микроконтроллера MCU и различных датчиков или сенсоров робота.
3-х выводной стабилизатор напряжения положительной полярности +5V на ток до 1А LM7805 является линейным стабилизатором, разработанным компанией Fairchild Semiconductor. Стабилизатор выпускается в корпусе TO-220AB, и при больших нагрузках по току, крепится на теплоотвод, используя специальное отверстие 3 мм. Стабилизатор LM7805 имеет фиксированное выходное напряжение положительной полярности 5V и выходной ток 1A. На вход устройства подаётся не стабилизированное напряжение, а в диапазоне от 7,5V до 20V. Нестабильность выходного напряжения или тока составляет 50mV.
Регулятор LM7805 может применяться с внешними компонентами для получения регулируемых напряжений и токов. Стабилизатор LM7805 предназначен для использования в источниках питания различных логических систем мехатроники.
Технические особенности линейного стабилизатора напряжения LM7805:
— Не требуются внешние дополнительные электронные компоненты
— Присутствует внутренняя термозащита и ограничение тока
— Максимальное входное напряжение: 20V
— Минимальное входное напряжение: 7.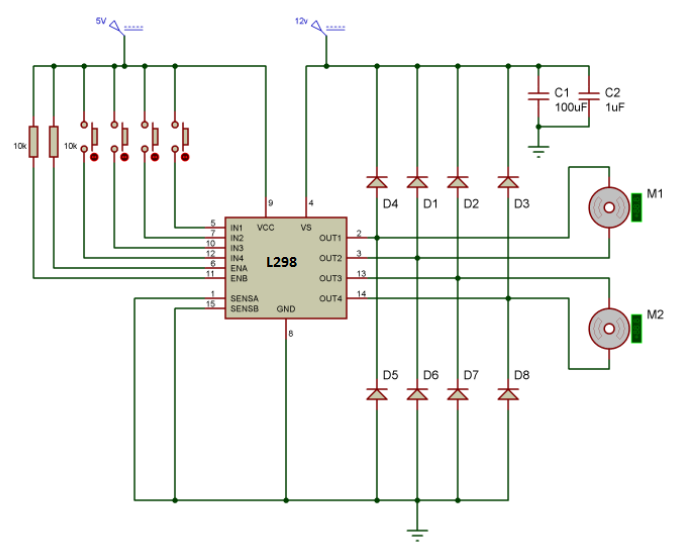 5V
5V
— Выходное стабилизированное напряжение: +5V
— Максимальный выходной ток: 1A
— Тип корпуса: TO-220AB
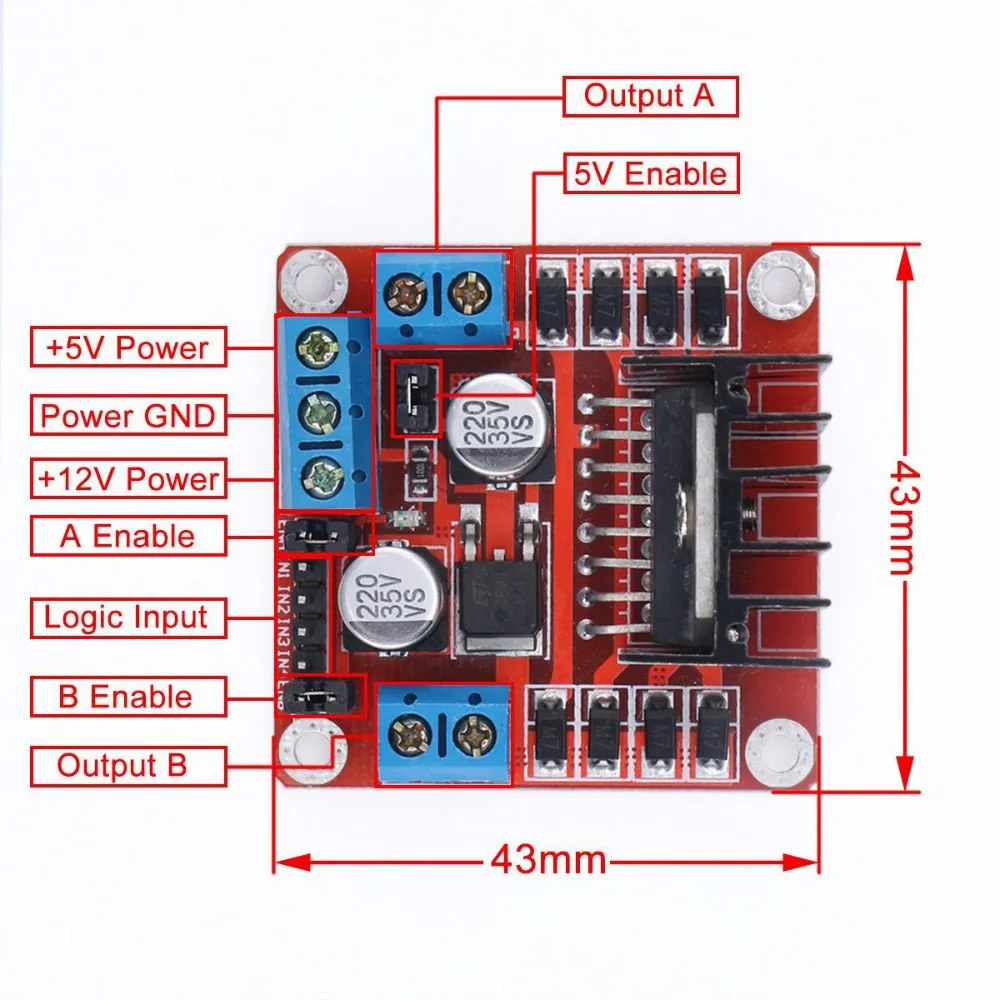
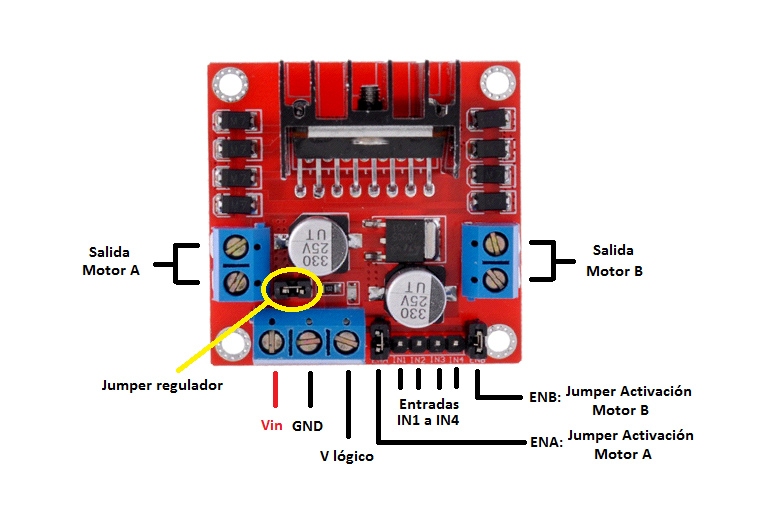
Для подключения коллекторных моторов постоянного тока служат порты оборудованные специальными разъемами (см. Рис. 4):
Рис. 4Контакты A и B предназначены для подключения первого коллекторного мотора.
Контакты C и D предназначены для подключения второго коллекторного мотора.
(управление двумя коллекторными электромоторами полностью независимо друг от друга)
Входное напряжение управляемой части в диапазоне от +5V до +30V подключите к контакту клемника «VDD».
Управление двумя коллекторными DC-моторами осуществляется через специальные входы: IN1, IN2, IN3, IN4.
PWA (5V-A) — надетая перемычка активирует включение канала управления двигателем A (мотор №1).
PWB (5V-B) — надетая перемычка активирует включение канала управления двигателем B (мотор №2).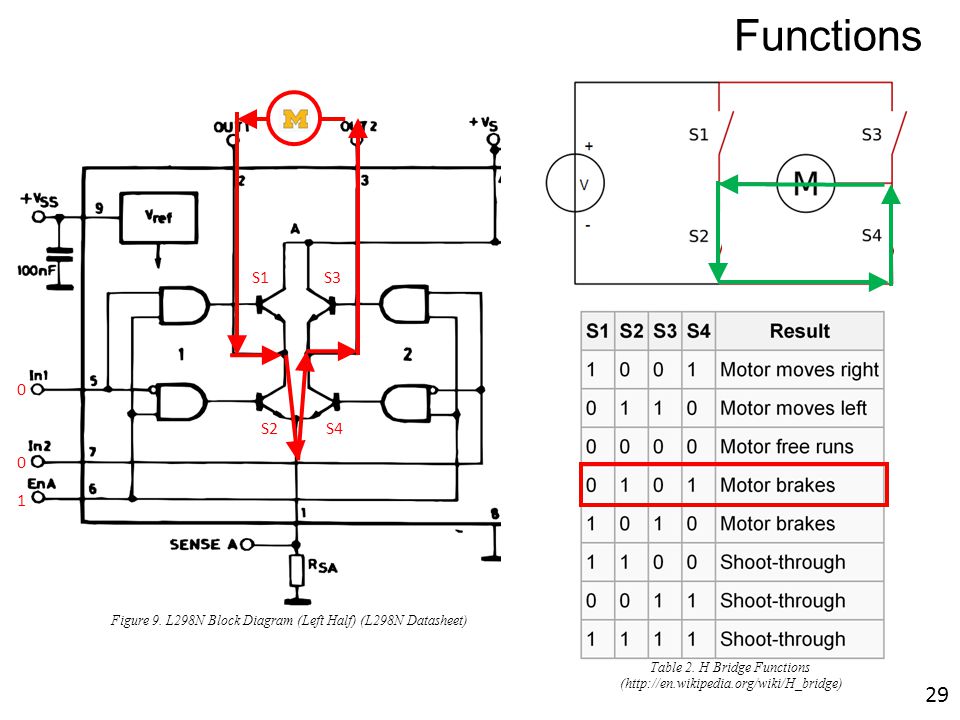
Для контроля скорости вращения двигателей необходимо соединить с ШИМ-выходом вашего MCU (PWM Interface) — пользовательский интерфейс ШИМ-контроллера (PWM) платы контроллера RKP-MDL298-01B.
Для задания необходимого направления вращения двигателя A (мотор №1) (см. таблицу ниже)
PWA IN1 IN2 Состояние мотора А (мотор №1) PWM>0 0 0 Стоп PWM>0 0 1 Вращение по часовой стрелки PWM>0 1 0 Вращение против часовой стрелки PWM>0 1 1 Стоп
Для задания необходимого направления вращения двигателя B (мотор №2) (см. таблицу ниже)
PWB IN3 IN4 Состояние мотора B (мотор №2) PWM>0 0 0 Стоп PWM>0 0 1 Вращение по часовой стрелки PWM>0 1 0 Вращение против часовой стрелки PWM>0 1 1 Стоп
Для подключения к плате драйвера RKP-MDL298-01B одного двухобмоточного четырехпроводного шагового двигателя используются одновременно все четыре контакта A, B, C, D, которые подключаются на четыре обмотки шагового двигателя A, B, C, D соответственно (см. Рис. 5).
Рис. 5).
Логика управления шаговым двигателем выглядит следующим образом: A, B, C, D, это четыре обмотки шагового двигателя.
Таблица ниже (четыре фазы шагового двигателя).
Управление шаговым двигателем осуществляется аналогично управлению двумя DC-моторами, при помощи сигналов PWA, IN1, IN2 и PWB, IN3, IN4.
L298n Схема Подключения — tokzamer.ru
В данной же статье мы рассмотрим драйвер двигателей базе микросхемы LN собранный на платке в виде модуля.
Микросхема L298N
Подключение модуля L298N
GND — земля. Зажимы, куда подключать моторы Следует отметить, что клеммный зажим с тремя выводами не только подводит к плате питающее напряжение, но и позволяет получить его уже преобразованное для собственных нужд драйвера величиной в 5В, как показано на рисунке выше.
Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. На схеме ниже приведен пример распределения выводов LN от рабочей микросхемы.
HIGH time. Мы использовали танковую платформу, учитывая что мотор крутит редуктор и гусеницы, то для его запуска требуется приличный ток.
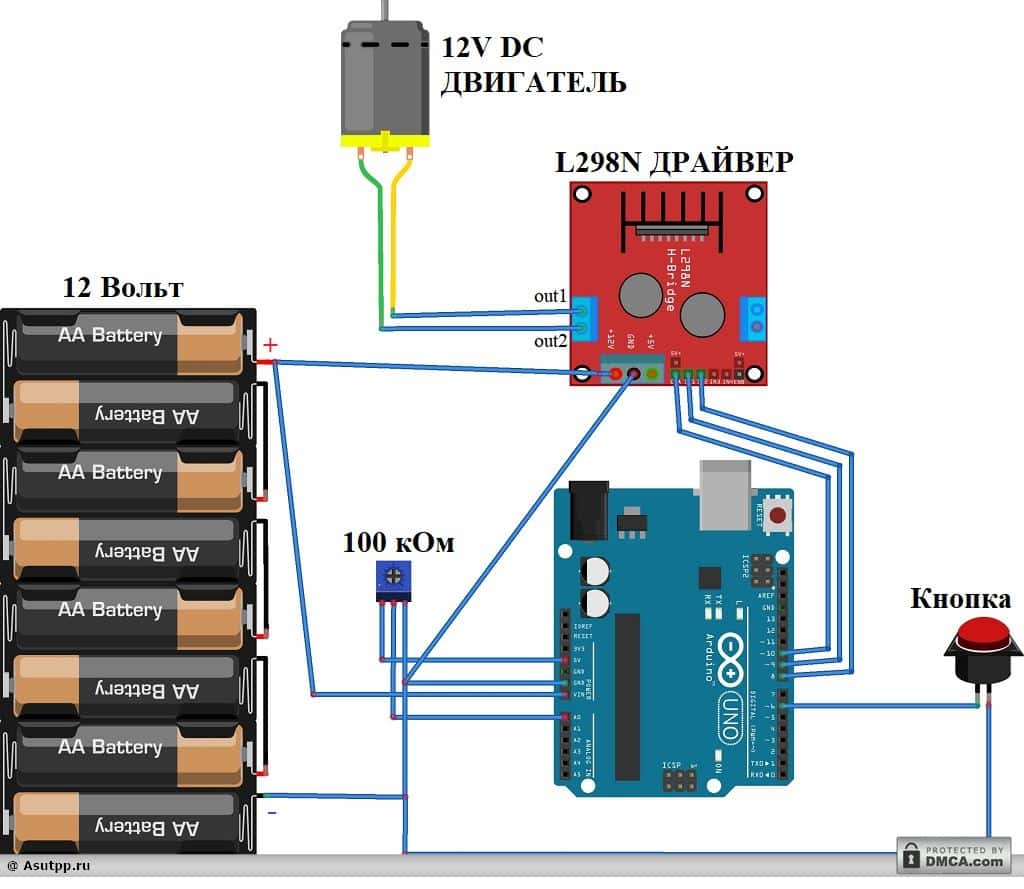
В приведенном ниже скетче два мотора будут вращаться в обе стороны с плавным нарастанием скорости. Схема соединения Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
Нет так давно мы рассматривали алгоритм сборки ЧПУ своими руками , где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Всё это приведёт к вращению мотора в определённом направлении. Блок клемм 3 отвечает за подключение питания двигателей.
Подключение L298N к плате Arduino
Причем некоторые пины должны поддерживать ШИМ-модуляцию. При этом есть возможность изменять скорость и направление вращения моторов. В данном примере рассматривается мост собранный на полупроводниках.
Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Подключение биполярного шагового двигателя к модулю L для управления через Raspberry Pi.
L298N, Arduino и двигатель постоянного тока
Активный — доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
Максимально допустимый ток для одного канала платы составляет 2А. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию.
При напряжении питания свыше 12V, без опаски подвеем нужное напряжение на данный вывод, но не забываем снять джампер. Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Управление может быть реализовано в активном или пассивном режимах.
Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Управление может быть реализовано в активном или пассивном режимах.
Подключение двигателя производится к винтовым клеммным зажимам — по паре для питания каждого моторчика. Активный режим. Потенциометр кОм.
В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов.
Позволяет управлять двумя моторами постоянного тока, либо одним шаговым двигателем. Ниже приведен более сложный и функциональный пример программы, которая будет взаимодействовать с пользователем и позволит интерактивно управлять двумя электродвигателями. Максимальное напряжение питания постоянным током 35 вольт. Заставим моторчик вращаться «вправо» 4 секунды, остановиться на 0.
Применяя схему Н-моста для управления работой двигателя постоянного тока, вы сможете реализовать полный набор операций для электрической машины без необходимости переподключения ее выводов. Если джампер одет, то реализуется логика «пассивного» управления. После этого подключите источник питания. Активный режим.
Как использовать драйвер двигателя L298N Dual H-Bridge
Дом » Как использовать драйвер двигателя L298N Dual H-Bridge
Плата драйвера двигателя L298N Dual H-Bridge имеет большую ценность и может быть использована с различными контроллерами роботов. Он оснащен мощным L298N Модуль драйвера двигателя с мощным радиатором. Это мощно достаточно для управления двигателями от 5 до 35 В при пиковом токе до 2 А.
Предусмотрен встроенный стабилизатор 5 В, который можно использовать для питания других
части схемы вашего робота, такие как микроконтроллер Arduino.
Использование
Выполните следующие действия, чтобы настроить плату контроллера мотора для работы как типичный привод двигателя робота для использования с двумя двигателями постоянного тока.
- Подсоедините двигатели вашего робота к зеленым винтовым клеммам двигателя A и двигателя B.
- Подключите ENA и ENB к цифровым выходам с поддержкой ШИМ на микроконтроллере вашего робота.
- Подключите контакты IN1, 2, 3 и 4 к любым цифровым выходам микроконтроллера вашего робота.
- Подайте на плату 5-16 В, подключив положительный (+) к синей винтовой клемме VMS, а землю (-) к синей винтовой клемме GND.
- Подробнее об управлении двигателями с помощью микроконтроллера робота см. ниже.
Все входы совместимы с TTL. Не включайте встроенный регулятор 5V если вы планируете подавать на двигатели напряжение более 16 В. Обратитесь к подробности ниже.
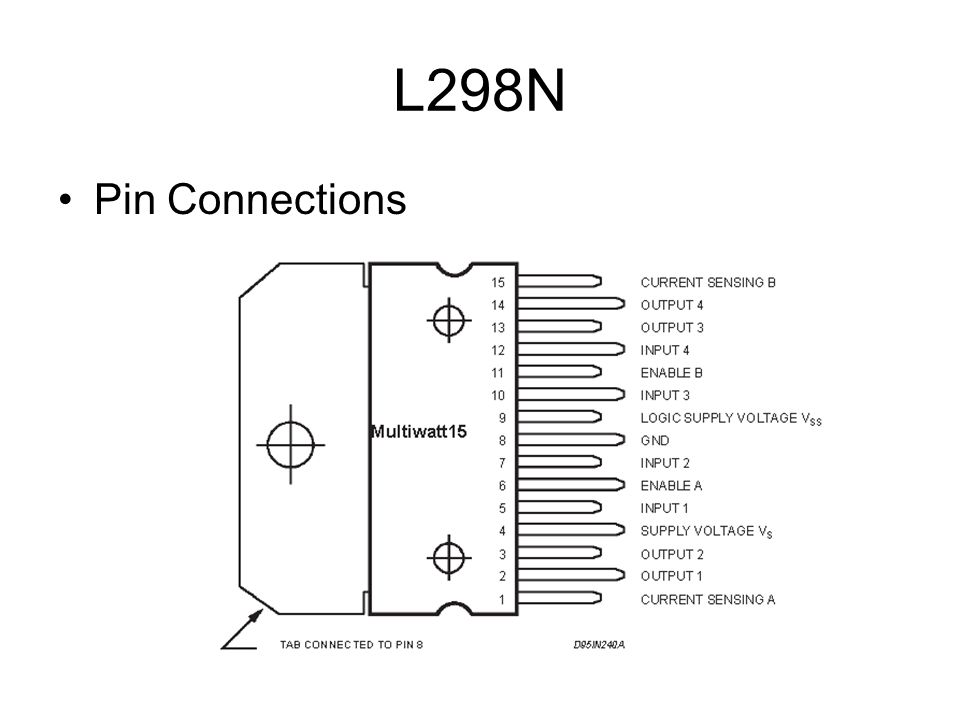
Сведения об оборудовании
| Штифт | Цвет | Имя | Описание |
|---|---|---|---|
| 1 | Зеленый | Мотор А- | Выход на двигатель А (-) |
| 2 | Зеленый | Электродвигатель А+ | Выход на двигатель А (+) |
| 3 | Синий | ВМС | Вход питания двигателя 4-35 В (+) |
| 4 | Синий | ЗЕМЛЯ | Земля (-) |
| 5 | Синий | 5В | Регулируемая мощность 5 В (+) |
| 6 | Зеленый | Мотор Б- | Выход на двигатель B (-) |
| 7 | Зеленый | Мотор В+ | Выход на двигатель B (+) |
 «>
«> Обратите внимание, что регулируемая мощность 5 В на контакте 5 выше является выходом, когда
Перемычка 5V_EN установлена. В противном случае вы должны ввести регулируемую мощность 5 В.
на контакте 5, чтобы схема могла работать правильно. Не включайте
встроенный регулятор 5 В, если вы подаете на двигатели более 16 В
контакт 3 или регулятор сгорит.
В противном случае вы должны ввести регулируемую мощность 5 В.
на контакте 5, чтобы схема могла работать правильно. Не включайте
встроенный регулятор 5 В, если вы подаете на двигатели более 16 В
контакт 3 или регулятор сгорит.
| Штифт | Имя | Описание |
|---|---|---|
| 1 | ЭНА | Вход для включения двигателя А |
| 2 | ИН1 | Вход для управления двигателем А |
| 3 | ИН1 | Вход для управления двигателем А |
| 4 | ЭНА | Вход для включения двигателя B |
| 5 | ИН1 | Вход для управления двигателем B |
| 6 | ИН2 | Вход для управления двигателем B |
| Имя | Описание |
|---|---|
| 5V_EN | Включить встроенный стабилизатор 5 В |
| У1 | Включение двигателя A, входной контакт IN2, подтягивающий резистор (10 кОм) |
| У2 | Включение двигателя A, входной контакт IN2, подтягивающий резистор (10 кОм) |
| У3 | Включить входной контакт двигателя B IN3, подтягивающий резистор (10 кОм) |
| У4 | Включить входной контакт двигателя B IN4, подтягивающий резистор (10 кОм) |
| CSA | Привязывает датчик тока двигателя А к земле |
| ЦСБ | Привязывает датчик тока двигателя B к земле |
 «>
«> Примечание. Функция определения тока CSA и CSB отключается, когда
перемычки есть. Чтобы использовать текущую функцию распознавания, удалите
перемычки и прикрепите к контактным штырям.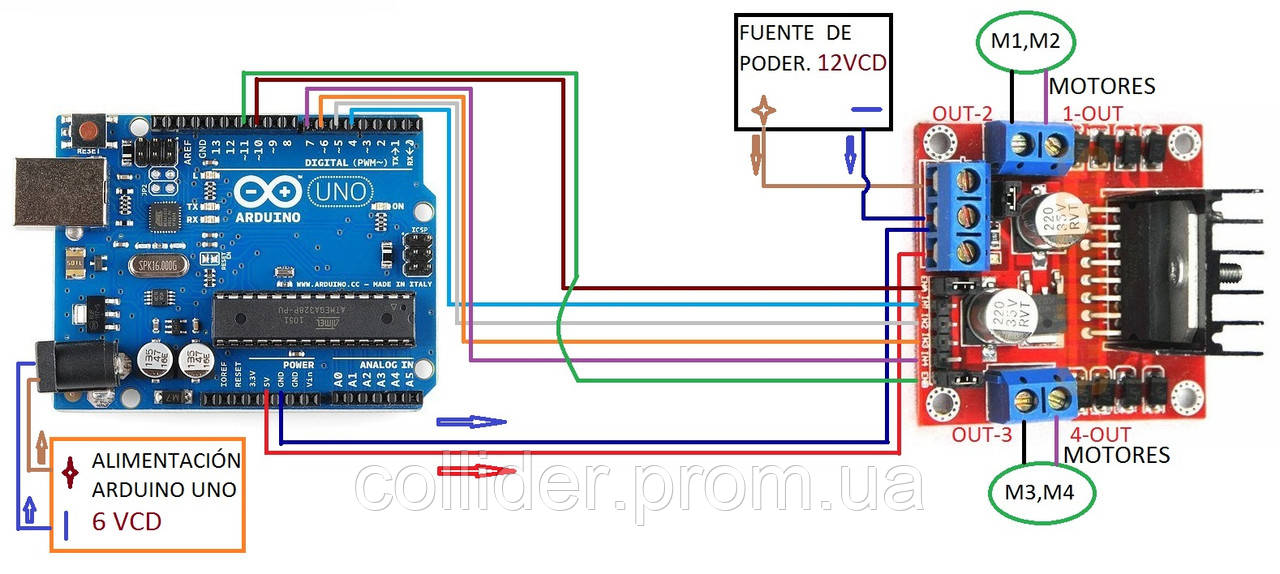 Оставьте перемычку подключенной
когда не используется текущий смысл.
Оставьте перемычку подключенной
когда не используется текущий смысл.
Программное обеспечение
Управление скоростью
Скорость двигателей можно регулировать, подключив выходы ШИМ от микроконтроллер вашего робота к входным контактам ENA и ENB на плата драйвера двигателя. Вывод ENA управляет двигателем А, а вывод ENB управляет двигателем B. Когда эти контакты имеют ВЫСОКИЙ уровень, питание выводится на мотор. Используя ШИМ, вы очень быстро включаете и выключаете питание, чтобы регулировать скорость двигателя. Чем длиннее рабочий цикл ШИМ, тем быстрее двигатель будет вращаться. Мы рекомендуем всегда использовать режим PWM. цикл 90% или меньше.
Управление направлением
Направление вращения двигателей регулируется с помощью IN1, IN2,
Входные контакты IN3 и IN4 на плате драйвера двигателя. Соедините эти контакты
к цифровым выходам микроконтроллера вашего робота. Чтобы заставить мотор А работать
вперед, установите IN1=HIGH и IN2=LOW. Чтобы заставить двигатель А двигаться назад, установите
IN1=НИЗКИЙ и IN2=ВЫСОКИЙ. Тот же метод используется для управления двигателем B: установите
IN3=HIGH и IN4=LOW для перехода вперед и установите IN3=LOW и IN4=HIGH для перехода
назад. Обратите внимание, что «вперед» и «назад» относятся к направлению
самих моторов. Если ваш робот не движется в ожидаемом
направлении, поменяйте полярность двигателя, поменяв местами зеленый винт
клеммы для двигателя A + и — и/или двигателя B + и -.
Тот же метод используется для управления двигателем B: установите
IN3=HIGH и IN4=LOW для перехода вперед и установите IN3=LOW и IN4=HIGH для перехода
назад. Обратите внимание, что «вперед» и «назад» относятся к направлению
самих моторов. Если ваш робот не движется в ожидаемом
направлении, поменяйте полярность двигателя, поменяв местами зеленый винт
клеммы для двигателя A + и — и/или двигателя B + и -.
Останов
Чтобы отключить питание двигателей, просто установите ENA=LOW для двигателя A и ENB=LOW для двигателя B. Это приведет к медленной остановке двигателей. и естественно от трения. Чтобы выполнить операцию быстрого торможения, установите ENA=LOW, IN1=LOW и IN2=LOW для двигателя A и ENB=LOW, IN3=LOW и IN4=LOW для двигателя B. Двигатели мгновенно остановятся. Вот несколько удобных таблиц, показывающих различные режимы работы.
Таблицы истинности драйверов двигателей
Вот несколько удобных таблиц, показывающих различные режимы работы.
| ЕСА | ИН1 | ИН2 | Описание |
|---|---|---|---|
| 0 | Н/Д | Н/Д | Двигатель А выключен |
| 1 | 0 | 0 | Двигатель А остановлен (тормоза) |
| 1 | 0 | 1 | Двигатель А включен и вращается назад |
| 1 | 1 | 0 | Двигатель А включен и вращается вперед |
| 1 | 1 | 1 | Двигатель А остановлен (тормоза) |
 «>
«> | ЕНБ | ИН3 | ИН4 | Описание |
|---|---|---|---|
| 0 | Н/Д | Н/Д | Двигатель B выключен |
| 1 | 0 | 0 | Двигатель B остановлен (тормоза) |
| 1 | 0 | 1 | Электродвигатель В включен и вращается назад |
| 1 | 1 | 0 | Электродвигатель B включен и вращается вперед |
| 1 | 1 | 1 | Двигатель B остановлен (тормоза) |
Сопутствующие товары
Подключение Pixhawk 2.
 4.8 и Motor Driver L298N — семейство Pixhawk
4.8 и Motor Driver L298N — семейство Pixhawk Arun_Balaji (Арун Баладжи)
#1
Как подключить Motor Driver L298N к Pixhawk 2.4.8?
амилкарлукас (Амилкар Лукас)
#2
Конечно есть. И все они описаны на этом форуме. Просто найдите «L298»
Arun_Balaji (Арун Баладжи)
#3
Спасибо за ответ!!!
Извините, я ничего не могу найти.
Подскажите, пожалуйста, распиновку подключения от Pixhawk к l298n или
Подскажите, пожалуйста, схему подключения.
амилкарлукас (Амилкар Лукас)
#4
https://discuss.ardupilot.org/search?q=L298
Арун_Баладжи (Арун Баладжи)
#5
Не могу найти схему подключения.
цион (.)
