Как подключить сервопривод к Arduino. Какие библиотеки использовать для управления сервоприводом. Как запрограммировать различные движения сервопривода. Какие проекты можно сделать с помощью сервопривода и Arduino.
Что такое сервопривод и как он работает
Сервопривод (или сервомотор) — это устройство, состоящее из электродвигателя, редуктора и схемы управления, которое позволяет точно контролировать угол поворота выходного вала. Основные компоненты сервопривода:
- Электродвигатель постоянного тока
- Редуктор для понижения скорости и увеличения крутящего момента
- Потенциометр, соединенный с выходным валом для измерения угла поворота
- Схема управления, которая сравнивает заданный и текущий угол поворота
Принцип работы сервопривода заключается в следующем:
- На сервопривод подается управляющий ШИМ-сигнал, длительность импульса которого определяет желаемый угол поворота
- Схема управления сравнивает заданный угол с текущим положением вала, измеренным потенциометром
- Если есть рассогласование, включается двигатель для поворота вала в нужное положение
- При достижении заданного угла двигатель останавливается
Такая система обеспечивает высокую точность позиционирования и удержания заданного угла поворота вала сервопривода.
Подключение сервопривода к Arduino
Для подключения сервопривода к Arduino потребуется:
- Сервопривод (например, популярный SG90)
- Плата Arduino (Uno, Nano и т.п.)
- 3 соединительных провода
Схема подключения:
- Коричневый провод сервопривода подключите к пину GND Arduino
- Красный провод — к 5V Arduino
- Оранжевый (сигнальный) провод — к любому цифровому пину Arduino (например, 9)
Важно: для питания мощных сервоприводов рекомендуется использовать отдельный источник питания, а не брать питание с Arduino.
Программирование сервопривода на Arduino
Для управления сервоприводом удобно использовать библиотеку Servo. Она позволяет легко задавать угол поворота сервопривода. Пример простого скетча:
#include <Servo.h>
Servo myservo; // создаем объект сервопривода
void setup() {
myservo.attach(9); // привязываем сервопривод к пину 9
}
void loop() {
myservo.write(0); // поворачиваем на 0 градусов
delay(1000); // ждем секунду
myservo.write(180); // поворачиваем на 180 градусов
delay(1000); // ждем секунду
}
Этот код будет поворачивать сервопривод от 0 до 180 градусов каждую секунду. Важные функции библиотеки Servo:
attach(pin)— привязывает сервопривод к пину Arduinowrite(angle)— поворачивает сервопривод на заданный уголread()— возвращает текущее положение сервопривода
Проекты с использованием сервопривода и Arduino
Сервопривод — универсальный привод, который можно использовать во множестве проектов. Несколько идей:
- Манипулятор-рука с несколькими степенями свободы
- Система слежения за солнцем для солнечных панелей
- Управляемые жалюзи или шторы
- Поворотная платформа для камеры
- Управление рулем модели корабля или самолета
Для более сложных проектов можно комбинировать сервоприводы с другими датчиками и исполнительными устройствами.
Как выбрать подходящий сервопривод
При выборе сервопривода для проекта следует учитывать несколько важных параметров:
- Крутящий момент — определяет силу, с которой сервопривод может поворачивать нагрузку
- Скорость поворота — как быстро сервопривод может повернуться на заданный угол
- Диапазон поворота — максимальный угол поворота выходного вала
- Размеры и вес — важны для компактных проектов
- Напряжение питания — должно соответствовать вашему источнику питания
Для большинства любительских проектов хорошо подойдут недорогие сервоприводы вроде SG90 или MG996R. Для более требовательных задач стоит рассмотреть профессиональные модели.

Советы по работе с сервоприводами
Несколько рекомендаций для успешного использования сервоприводов в проектах:
- Не превышайте максимальный угол поворота сервопривода, это может повредить механизм
- Используйте отдельный источник питания для мощных или нескольких сервоприводов
- Добавьте задержку между командами поворота, чтобы дать сервоприводу время на движение
- Калибруйте крайние положения сервопривода для вашего конкретного проекта
- Используйте плавное изменение угла для снижения рывков и вибраций
Соблюдение этих советов поможет создать надежный и точный механизм на основе сервопривода.
Заключение
Сервопривод в сочетании с Arduino открывает широкие возможности для создания различных подвижных механизмов и роботов. Простота подключения и программирования делает сервоприводы отличным выбором для начинающих разработчиков. Экспериментируйте с различными проектами, комбинируйте сервоприводы с другими компонентами, и вы сможете воплотить в жизнь самые интересные идеи!
Как подключить сервопривод к микроконтроллеру?
25 июля 2016
3466 заинтересовались
Статью подготовила
Катерина Абрамцова
Контент-менеджер
Очередная статья об элементах управления rc моделями будет интересна тем, кто намерен не только овладеть навыками пилота, но и приложить руку к созданию радиоуправляемого девайса. А именно, мы рассмотрим подключение сервопривода к ардуино.
Что такое сервопривод мы уже знаем. Это исполнительная машинка с мотором, для которого мы можем задавать необходимое положение вала, управлять ним, задавая точный градус поворота. Моделирование различных движений производится с помощью определенного датчика (положения, скорости, усилия) и блока управления приводом, с электронной или механической системой тяг.
Сервопривод получает значение управляющего параметра в виде импульса, сравнивает полученные данные с показаниями датчика и задает необходимое положение с помощью исполнительного элемента, например, качалки.
Что же такое Arduino?
Это своеобразная плата-конструктор небольших размеров, с помощью которой даже люди очень далекие от электроники могут собрать свое радиоуправляемое устройство. На плате заранее предусмотрен контроллер и необходимая для его работы обвязка.
Все исполнительные устройства (реле, модули, светодиоды и т. д.) подключаются без пайки. Для этого есть специальные цифровые и аналоговые разъемы входы и выходы.
Еще один плюс платформы Arduino — открытая среда программирования. Вы без проблем найдете инструкции по подключению и настройке различных датчиков и плат расширения.
Установка сервопривода
Для Ардуино и сервопривода подключения нам потребуется:
- плата Arduino
- 3 провода со стандартным 3-х пиновым разъемом с шагом 2.54мм
- сервопривод
- программа Arduino IDE
Схематически подключение Ардуино к сервоприводу выглядит так:
Цвета проводов могут меняться, но мы будем ориентироваться на следующее распределение:
- Черный (коричневый) — для земли.
 Подключается к GND выводу,
Подключается к GND выводу, - Красный — источник питания. Подключается к контакту VTG,
- Оранжевый (белый) — управляющий сигнал. Предназначен для цифрового вывода SIG.
Программное обеспечение для Ардуино
Для запуска Arduino необходимо скачать специальную программу (вы без проблем найдете ее на официальном сайте). Среда разработки Arduino IDE состоит из кода, интерфейса сообщений, окна для вывода текста, панели инструментов и ветки меню. Для загрузки программ плата Arduino через USB соединяется с вашим компьютером и производится установка необходимого ПО.
На показанном примере мы видим, что 4 последние команды кода отвечают за угол поворота вала и интервал в миллисекундах между поворотами. Вы можете самостоятельно менять эти цифры. Например, если задать параметр 0-1000-90-1000, сервопривод будет выполнять поворот на 90 градусов через 1 секунду (1000 миллисекунд).
Если вы новичок в этом деле, используйте в помощь библиотеку Arduino.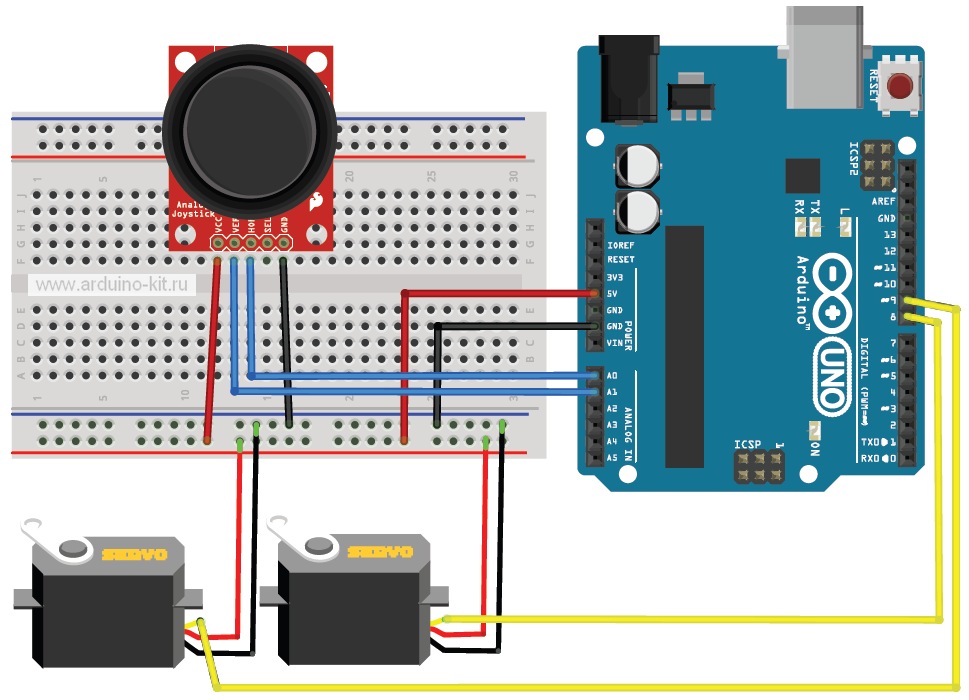
Теперь вы знаете, зачем необходимо подключение сервопривода к Ардуино, и как осуществить установку сервопривода в домашних условиях.
У нас вы всегда сможете купить микро-сервоприводы, большие сервомашинки и запчасти к ним для создания вашей уникальной радиоуправляемой техники! Больше полезных статей читайте в блоге интернет-магазина «Planeta Hobby».
Управление сервоприводом
Классический сервопривод имеет в своей конструкции силовой агрегат двигатель , измеритель позиционирования датчик и 3-контурную управляющую систему, отвечающую за регулировку позиций, скоростного режима и электрического напряжения. В машиностроении, где изначально использовались сервоприводы, эти устройства выполняют вспомогательную функцию. Сегодня сфера их применения изменилась. В полном масштабе функционал этих устройств задействован в сервомеханизмах.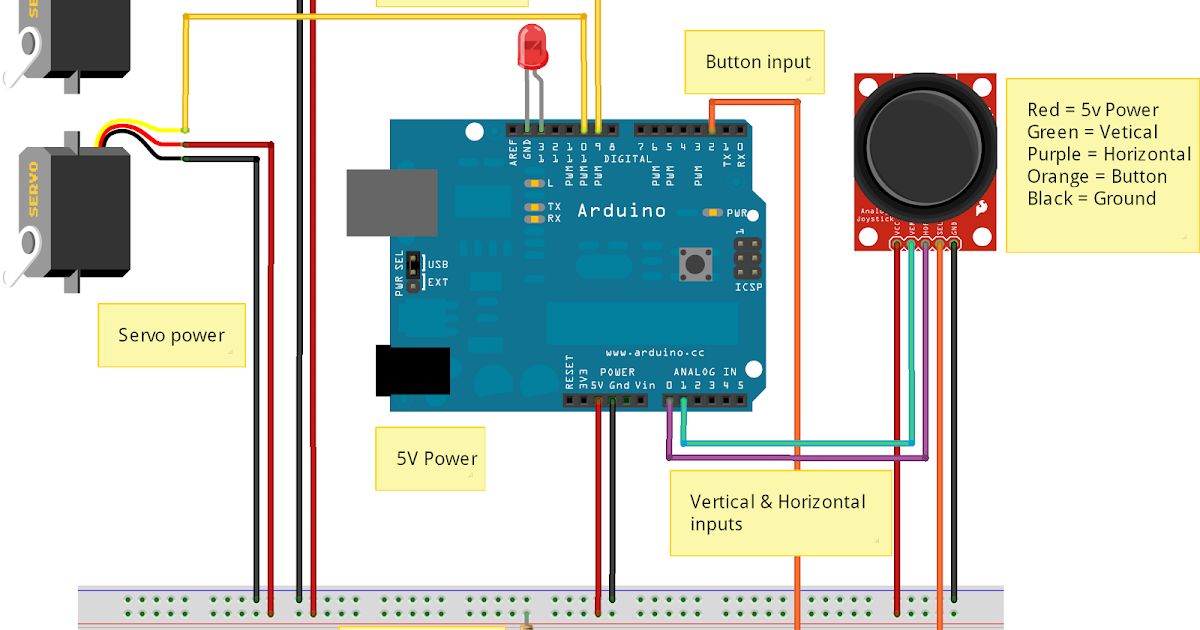
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Arduino. Управление сервоприводом без библиотеки Servo.h
- Подключение сервопривода к Ардуино
ESP32:Примеры/Веб-сервер на базе ESP32: удаленное управление сервоприводом - Arduino UNO урок 2 — Управление сервоприводом
- Подключение сервопривода к Ардуино
- Управление сервоприводом на микроконтроллере
- Raspberry Pi:Примеры/Управление сервоприводом
- Управление сервоприводом
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: КАК ПОДКЛЮЧИТЬ СЕРВОПРИВОД К ARDUINO [Уроки Ардуино #15]
Arduino. Управление сервоприводом без библиотеки Servo.h
Плюс вся эта схема нереально чувствительна ко влаге, напряжению питания, качеству кондеров а на МК только фоторезистор и все. А ещё ведь есть такой вариант. Тоже, вроде как, недорого. Войдите , пожалуйста. Хабр Geektimes Тостер Мой круг Фрилансим. Мегапосты: Криминальный квест HR-истории Путешествия гика.
Войти Регистрация. Источник бесперебойного питания на источнике бесперебойной подачи информации Читайте на Хабре. Читают сейчас. Интервью с веб-разработчиком Pornhub 40,5k Поделиться публикацией. Похожие публикации. PHP-программист для проекта. RPS Можно удаленно. Медиабайер для онлайн-сервисов.
Instapromo Studio Можно удаленно. Все вакансии. Иногда такая схема может быть полезна, но учитывая стоимость мизерную ардуинок — для любителей может и не понадобиться, хотя для более серьезных разработок может оказаться находкой. ОУ можно применить любой? Alyoshka 16 января в 0. Отличная идея! Стрелка, шкала и готово — сервопривод как имитация механического электроизмерительного прибора. Camellan 16 января в 0. Alexeyslav 17 января в 0. Там скорей мощи не хватит, а не угла… угол поворота меняется шестерёнками их можно из фанеры вырезать лазерной резкой , с потерей силы.
ОУ можно применить любой? Alyoshka 16 января в 0. Отличная идея! Стрелка, шкала и готово — сервопривод как имитация механического электроизмерительного прибора. Camellan 16 января в 0. Alexeyslav 17 января в 0. Там скорей мощи не хватит, а не угла… угол поворота меняется шестерёнками их можно из фанеры вырезать лазерной резкой , с потерей силы.
Camellan 17 января в 0. Горизонтальные аллюминиевые жалюзи со снятой червячной передачей и сервой, подключенной прямо к оси, изумительно работают, но угла таки не хватает…. Alexeyslav 18 января в 0. Там не операционный усилитель, а логический элемент НЕ инвертор из микросхемы 74HC И лучше усилить его включением оставшихся элементов микросхемы параллельно.
Хоть ток и мизерный должен быть, но мало ли что на входе китайской сервы поставят. Не думаю, что есть необходимость усиливать выход. Один элемент тянет 25 мА. Ардуинка один выход до 40 мА. Sworfly 16 января в 0. Поэтому, автору респект! AllexIn 16 января в 0. SADKO 16 января в 0. Эхъ, сейчас какой-нибудь дуринщик запостит картинку про буханку и троллейбус :- … а меня в SG90 и иже с ним, больше всего парит то, что внутри там опять-же микроконтроллер простаивает, вот если бы да ка бы, да за пилили китайцы возможность в оном прошивку менять, было бы классно, хочешь 90 градусов, а хочешь цифра, хочешь шим….
Там сами по себе элементы не слишком сложные внутри — датчик углового положения потенциометр, нарример , драйвер ДПТ можно обычный MOSFET и контроллер, считываюший показания датчика и управляющий двигателем так, чтобы обеспечить требуемое положение, по заданному алгоритму. Если писать самому ПО для контроллера, можно разные алгоритмы попробовать и всякие свои хотелки реализовать.
Но здесь у каждого свои подходы. А вы уверены что там вообще есть контроллер? Не думаю что для такой простой системы он вообще нужен. Alyoshka 18 января в 0. The top cover hosts the plastic gears while the middle cover hosts a DC motor, a controller , and the potentiometer. И где вы там микроконтроллер увидели? Обычная аналоговая схема, как описано в комментарии ниже. Разве там микроконтроллер?
Там обычная аналоговая схема с компаратором. ШИМ преобразуется в аналог, аналог сравнивается с сигналом от потенциометра компаратором и разница выдаётся на мостовой драйвер управления двигателем. Какие там микроконтроллеры…. Описанный Вами алгоритм слежения, конечно, удобен, но можно и PID-алгоритм применить. Так и я про что… нет там цифрового контроллера, чисто аналоговая схема с некоторой логикой. ПИД в серве это хорошо, но не с тем быстродействием и мощностью как у SG Да, верно, спасибо за уточнение!!!
Описанный Вами алгоритм слежения, конечно, удобен, но можно и PID-алгоритм применить. Так и я про что… нет там цифрового контроллера, чисто аналоговая схема с некоторой логикой. ПИД в серве это хорошо, но не с тем быстродействием и мощностью как у SG Да, верно, спасибо за уточнение!!!
Пфффф… слишком современный транзистор взяли, на МП21!!! Или на экзотике — ГТ, размером со спичечную головку. Осталось развести и настравить под них столько же макеток на все случаи. А может у кого есть готовые? Да, я понимаю. Просто написал, что при цене МК, стремящейся к нулю, смысл изобретать на логике разве что в целях тренировки ума.
Я сам половину простейших схем, когда надо вот прям сейчас, делаю на uln, включая триггеры. Для этого купил их мешок. YurBurGer 16 января в 0. Для исключения помех? Скорее всего для удобства разделения каналов. Дешифратор для восьмиканальной системы получается на одной-двух микросхемах.
Очень неплохо это дело описано у Г. НЛО прилетело и опубликовало эту надпись здесь. Любой блок питания с выходным напряжением 5В и током мА и более. Практически любая зарядка от современных смартфонов.
Любой блок питания с выходным напряжением 5В и током мА и более. Практически любая зарядка от современных смартфонов.
Сервопривод под ощутимой нагрузкой в импульсе потреблял до мА. Gryphon88 17 января в 0. А от серийного или последовательного порта получится одновременно запитать и управлять? Вроде из ВинХР и никсов можно дергать пины напрямую…. Не получиться, там токи маленькие выходные. А сервопривод по питанию потребляет прилично, как я говорил, до мА. Мотивация примерно такая же как у автора: иметь возможность покрутить мотором туда-сюда без микроконтроллера, надоело на каждый чих LUFA использовать.
А после установки угла не снимаете сигнал? Нет, не снимается. Сервопривод и нужен для постоянного поддержания заданного угла. Что вы собираетесь спалить в нем? Как верно уже заметили, в этом и состоит задача сервы — держать заданный угол. От себя добавлю, что можно использовать и шаговый двигатель в подобной роли — у него тоже есть некоторый момент удержания.
Что обсуждают. Как я проработала 3 месяца в Я. Маркете и уволилась k Самое читаемое. Рекомендуем Разместить. Ваш аккаунт Войти Регистрация. Услуги Реклама Тарифы Контент Семинары. Настройка языка. О сайте. Служба поддержки. Мобильная версия. Интерфейс Русский. Сохранить настройки.
Как я проработала 3 месяца в Я. Маркете и уволилась k Самое читаемое. Рекомендуем Разместить. Ваш аккаунт Войти Регистрация. Услуги Реклама Тарифы Контент Семинары. Настройка языка. О сайте. Служба поддержки. Мобильная версия. Интерфейс Русский. Сохранить настройки.
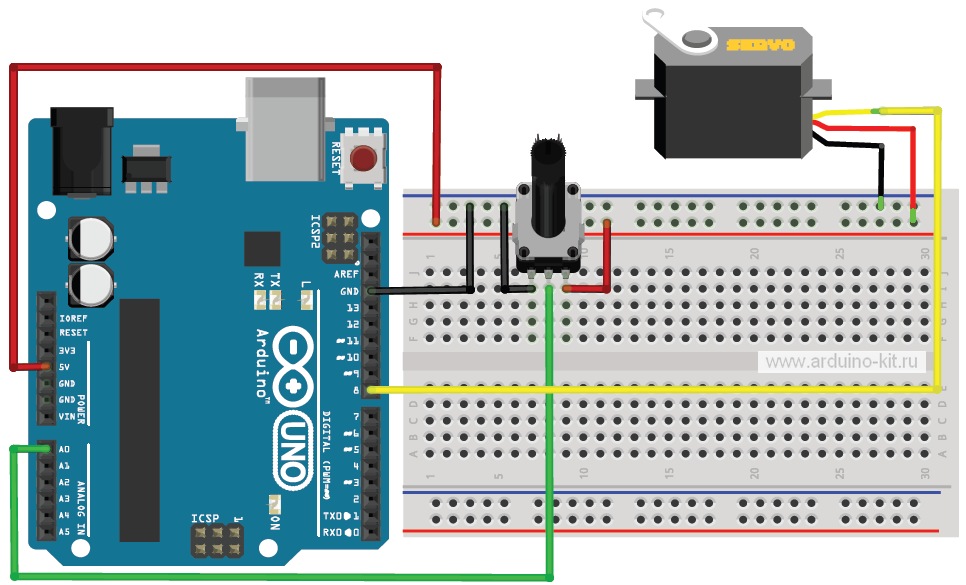
Подключение сервопривода к Ардуино
Данный пример демонстрирует как задать угол поворота сервопривода. Угол поворота изменяется шириной импульса ШИМ-сигнала. ШИМ-сигнал на выходе Raspberry Pi нестабилен и вызывает дрожание механизма сервопривода. Сервопривод относится к двигателям прерывного действия, вал поворачивается только на заданный угол
Щелкните Управление сервоприводами (Manage Servo Motors). Откроется диалоговое окно Сервоприводы (Servo Motors). Сервопривод и его статус.
ESP32:Примеры/Веб-сервер на базе ESP32: удаленное управление сервоприводом
Здравствуйте, в этой статье мы поговорим о сервоприводах. В статье рассмотрены вопросы управления сервоприводами, возможные схемы подключения серво к ардуино, а также пример скетча.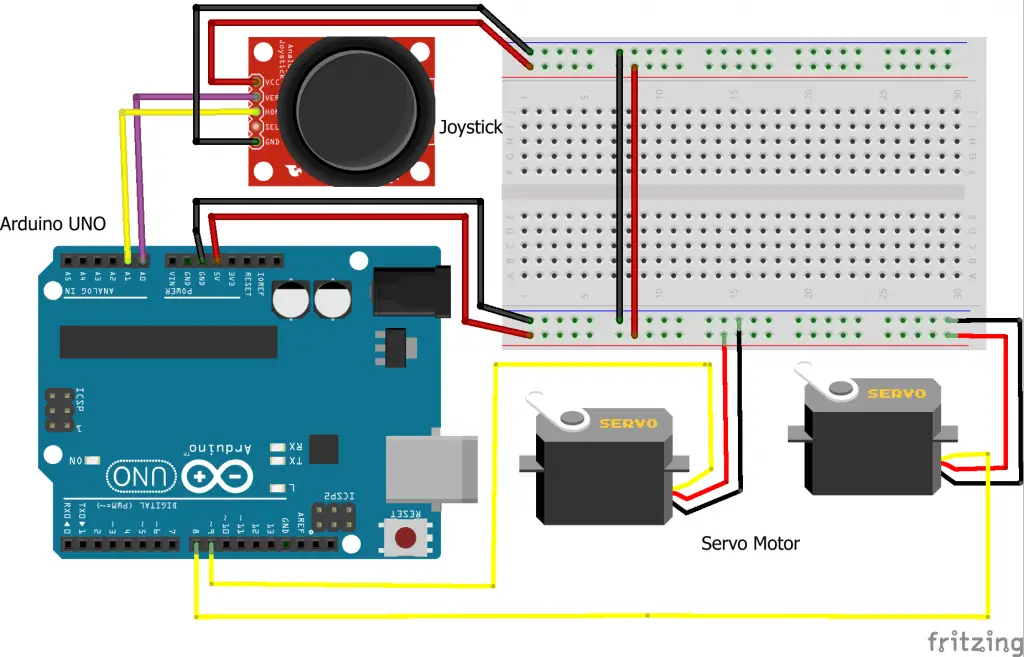 Сервопривод — это такой вид привода, который может точно управлять параметрами движения. Другими словами, это двигатель, который может повернуть свой вал на определенный угол или поддерживать непрерывное вращение с точным периодом. Повернуть дальномер или другие датчики на определенный угол, чтобы измерить расстояние в узком секторе обзора робота. По видам можно выделить аналоговые и цифровые сервоприводы. Внешних отличий нет — все различия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровой — микропроцессор, принимающий и анализирующий импульсы. Не рекомендуется подключать мощные серво напрямую к плате , так как они создают для схемы питания Arduino ток, не совместимый с жизнью — повезет, если сработает защита. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
Сервопривод — это такой вид привода, который может точно управлять параметрами движения. Другими словами, это двигатель, который может повернуть свой вал на определенный угол или поддерживать непрерывное вращение с точным периодом. Повернуть дальномер или другие датчики на определенный угол, чтобы измерить расстояние в узком секторе обзора робота. По видам можно выделить аналоговые и цифровые сервоприводы. Внешних отличий нет — все различия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровой — микропроцессор, принимающий и анализирующий импульсы. Не рекомендуется подключать мощные серво напрямую к плате , так как они создают для схемы питания Arduino ток, не совместимый с жизнью — повезет, если сработает защита. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
Arduino UNO урок 2 — Управление сервоприводом
Управление сервоприводом по Wi-Fi Всем привет! Вопрос вот в чем: Есть wi-fi модуль, микроконтроллер и дальше сервопривод. Как послать Управление сервоприводом есть сервомашинка переделанная под постоянное вращение убран реостат и ограничитель хода Управление сервоприводом Снова нужна помощь сообщества : Пытаюсь прикрутить к коду, представленному ниже, управление ШИМом,
Как послать Управление сервоприводом есть сервомашинка переделанная под постоянное вращение убран реостат и ограничитель хода Управление сервоприводом Снова нужна помощь сообщества : Пытаюсь прикрутить к коду, представленному ниже, управление ШИМом,
В данной статье рассматриваются сервоприводы: их устройство, предназначение, подсказки по подключению и управлению, разновидности сервоприводов и их сравнение. Давайте приступим и начнём с того, что же такое сервопривод.
Подключение сервопривода к Ардуино
ТОР товары Mitsubishi Electric. Микроконтроллеры Альфа. Преобразователи частоты Mitsubishi. Недорогие частотные преобразователи FR-D Универсальные инверторы Mitsubishi FR-E Инверторы для насосов и вентиляторов FR-F
Управление сервоприводом на микроконтроллере
Наряду с контроллером и сенсорами, актуаторы являются важным составляющим всех без исключения роботов. Они вращают колеса робота, позволяя ему перемещаться в пространстве, и приводят в действие мощные манипуляторы , которыми он хватает предметы. В этом уроке мы будем работать с одним из таких актуаторов, который называется сервоприводом или сервомашинкой. В отличие от обычного электромотора, сервопривод представляет собой сложное составное устройство, состоящее из двигателя постоянного тока, шестеренного редуктора, потенциометра и электронной схемы. Всё это позволяет сервоприводу поворачивать вал строго на заданный угол, и удерживать его. С помощью таких приводов можно, например, сделать вот такой несложный манипулятор:. Итак, как уже говорилось выше, сервопривод славится тем, что может поворачиваться на заданный угол.
В этом уроке мы будем работать с одним из таких актуаторов, который называется сервоприводом или сервомашинкой. В отличие от обычного электромотора, сервопривод представляет собой сложное составное устройство, состоящее из двигателя постоянного тока, шестеренного редуктора, потенциометра и электронной схемы. Всё это позволяет сервоприводу поворачивать вал строго на заданный угол, и удерживать его. С помощью таких приводов можно, например, сделать вот такой несложный манипулятор:. Итак, как уже говорилось выше, сервопривод славится тем, что может поворачиваться на заданный угол.
Таким образом, для управления сервоприводом нам потребуется формировать ШИМ с частотой 50 герц. При этом для положения “0”.
Raspberry Pi:Примеры/Управление сервоприводом
Каталог поставляемых компонентов. Каталог 1. Привод MDrivePlus объединяет в одном корпусе высокомоментный гибридный шаговый двигатель и систему управления с модернизированным регулятором тока второго поколения, заметно повышающим производительность двигателя и плавность хода.
Управление сервоприводом
Стандартные аналоговые сервоприводы, которые можно приобрести в широком ассортименте в магазинах для хобби и моделирования, имеют в своем большинстве универсальное управление. Приведенные ниже параметры являются наиболее типовыми, но не обязательно соответствуют Вашему экземпляру. Для определения параметров обратитесь к инструкции к конкретному экземпляру сервопривода. Сервоприводы питаются от постоянного напряжения в пределах от 4. Управляющий сигнал — это импульсный сигнал с ШИМ широтно-импульсной модуляцией , представляющий собой последовательность прямоугольных импульсов с амплитудой В и длительностью от 0.
Теория и практика. Кейсы, схемы, примеры и технические решения, обзоры интересных электротехнических новинок.
Сервопривод является очень важным элементом при конструировании роботов и радиоуправляемых моделей. Программа очень проста и наглядна. Начинается она с подключения файла. Данный файл содержит все необходимые команды для управления серво, чтобы облегчить нам жизнь и не изобретать велосипед. Далее, мы должны создать обьект servo.
Далее, мы должны создать обьект servo.
Как подключить и управлять сервоприводом на Ардуино Рассмотрим устройство и принцип работы сервоприводов, разберем скетчи для управления сервопривода. Рассмотрим на этом занятии устройство и принцип работы сервоприводов. Сервопривод сервомотор является важным элементом при конструировании различных роботов и механизмов. Это точный исполнитель, который имеет обратную связь, позволяющую точно управлять движениями механизмов.
Учебное пособие: Серводвигатель
Итак, приступим!
В этом уроке вы подключите простой и дешевый серводвигатель к Arduino Mega 2560.
Прошивка MobiFlight была протестирована с действительно дешевыми сервоприводами с поворотом на 180 градусов, которые предназначены для моделей с радиоуправлением. Вы можете получить их по низкой цене на eBay и так далее.
Вы настроите серводвигатель с помощью MobiFlight Connector таким образом, чтобы текущее положение двигателя синхронизировалось с текущим положением закрылков в вашем авиасимуляторе. Для этого вы будете использовать соответствующее смещение FSUIPC.
Для этого вы будете использовать соответствующее смещение FSUIPC.
Сначала вы узнаете, как подключить серводвигатель к плате MobiFlight. Во-вторых, конфигурация в приложении MobiFlight Connector описана шаг за шагом.
Обучение длится около 10 минут.
Это то, что вам нужно для обучения
Следующие предметы необходимы для самостоятельного прохождения этого руководства:
- Текущая версия MobiFlight Connector (мин. 6.0.0)
- A Arduino Mega 2560 mit aufgespielter Прошивка MobiFlight — или, скажем, плата MobiFlight 🙂
- Серводвигатель 5 В с поворотом на 180° из области радиоуправляемой модели. Если вы будете искать «серводвигатель микро» на eBay, вполне вероятно, что вы найдете точно такие же, как у меня, по очень низкой цене.
Подключение серводвигателя может осуществляться непосредственно к контактам Arduino Mega:
Как видно на рисунке, для сервопривода необходимы следующие соединения Arduino Mega (например, поверх контакта 22)
Я рекомендую использовать контакты 2-12 с поддержкой ШИМ — возможно, я смогу оптимизировать управление через эти контакты в будущем. Впрочем, на данный момент это не имеет никакого значения — можно использовать любой из цифровых выводов ШИМ или нет.
Впрочем, на данный момент это не имеет никакого значения — можно использовать любой из цифровых выводов ШИМ или нет.
Изображения в этом руководстве взяты из немецкой версии — я уверен, что вы можете найти соответствующие элементы в своем английском интерфейсе. Спасибо за понимание.
После запуска MobiFlight Connector вы увидите обзор вашей текущей конфигурации. В этом примере он пуст, потому что еще ничего не определено.
Теперь вы открываете диалоговое окно настроек, потому что вам нужно сначала настроить MobiFlight. Вы должны указать, к какому контакту подключен ваш сервопривод.
Следовательно, выберите Extras > Settings > MobiFlight Modules-Tab
Выберите желаемую доску MobiFlight в дереве слева.
В нижеприведенном древовидном представлении доступно несколько различных действий. Чтобы добавить сервопривод, нажмите Новое устройство > Сервопривод. Как вы можете видеть на изображении, также доступно контекстное меню, из которого вы можете выбрать ту же опцию.
Теперь к вашей плате MobiFlight на базе Arduino добавлен серводвигатель.
В правой части вкладки вы теперь предоставляете дополнительную информацию — она различается для разных типов устройств.
Для серводвигателя доступны следующие опции:
- Линия DIN — линия управления
- Имя — метка устройства. Эта метка появляется позже в других диалоговых окнах конфигурации и позволяет легко отличить его от других устройств .
В этом уроке вы используете контакт 2 для линии управления и «Servo» в качестве метки.
Не хватает одного шага: вы должны загрузить обновленную конфигурацию на выбранную плату. Нажмите кнопку загрузки на панели инструментов. Кнопка первая.
Появится сообщение о том, что загрузка прошла успешно. Теперь ваш MobiFlight перезапускается и знает, что подключено новое устройство и что это серводвигатель.
Вы закрываете диалоговое окно настроек, нажимая кнопку «ОК». Вы вернулись к обзору, который по-прежнему пуст.
Теперь вы собираетесь создать новую конфигурацию положения закрылков вашего самолета в авиасимуляторе.
Сначала вы назначаете имя в поле «Описание». В этом уроке это «Положение закрылков».
Нажмите кнопку «…» в конце строки. Появляется мастер настройки.
Выберите правильный пресет FSUIPC, в этом случае мы берем «Закрылки — Положение 1» в качестве хорошей отправной точки.
Нажмите кнопку «ОК» рядом с раскрывающимся списком.
Теперь все настройки автоматически устанавливаются для вас со значениями из пресета. Легко, да?
Перейдите на вкладку «Сравнить» и снимите флажок, потому что в этом случае нам не нужно сравнение, поскольку все значения используются для управления вашим сервоприводом. (Предустановка предназначалась для использования со светодиодом).
Теперь перейдите на вкладку «Дисплей».
В разделе «Тип отображения» выберите нужную доску MobiFlight из списка.
В следующем раскрывающемся списке «Тип использования» выберите «Сервопривод».
Раздел «Настройки дисплея» автоматически обновляется.
Выберите пункт «Servo» из выпадающего списка «Servo».
Нажмите кнопку «Тест». Теперь серводвигатель должен вращаться до максимального отклонения в 180 градусов.
Если хотите, вы можете уменьшить количество полных оборотов, отрегулировав значение «Макс. обороты». Чем меньше значение, тем меньше вращается сервопривод. Это имеет смысл, если вы не хотите использовать полные 180 градусов или хотите, чтобы сервопривод не вращался слишком сильно и издавал странные звуки. Попробуйте свои настройки, нажав кнопку тестирования.
Если ваш двигатель не отвечает, проверьте подключение линии управления к вашей доске MobiFlight. Проверьте также контакт напряжения и заземление.
Если сервопривод движется как положено, снова нажмите кнопку остановки.
Установить Мин. Нулевое значение — это наименьшее значение смещения FSUIPC для закрылков.
Установите Макс. Значение до 16383 — это максимальное значение смещения FSUIPC для закрылков.
Эти настройки могут отличаться для самолетов, отличных от настроек по умолчанию, поэтому сначала попробуйте использовать самолет по умолчанию
Закройте диалоговое окно ConfigWizard, нажав кнопку OK.
Активируйте только что добавленную строку конфигурации, установив флажок перед ней.
Запустите свой любимый авиасимулятор, например. ФСС.
Загрузите свой рейс.
Подождите, пока не будет установлено соединение FSUIPC. На это указывает значок состояния FSUIPC в строке состояния.
Запустите MobiFlight Connector, нажав кнопку «Пуск» на главной панели инструментов.
Когда вы находитесь в самолете и главный выключатель батареи включен, начните менять положение закрылков.
Ваш сервопривод должен двигаться соответствующим образом.
Поздравляем!!!
Всего за пару минут и несколько простых действий вам удалось построить индикатор закрылков. О да, это было легко!
Пожалуйста, сообщите нам на форуме, как вам помогло обучение, и расскажите нам больше о том, что вы строите с помощью MobiFlight!
Интерфейс джойстика Arduino — управление сервоприводом с помощью Arduino и джойстика
В этом проекте я покажу вам, как можно реализовать интерфейс джойстика Arduino и использовать интерфейс джойстика Arduino в приложении, где я буду управлять двумя серводвигателями и светодиодом.
[adsense1]
Я расскажу о модуле аналогового джойстика, из чего состоит типичный модуль джойстика (т.е. его компоненты), как работает модуль джойстика и, наконец, как связать джойстик с Arduino.
Описание
Краткое описание модуля аналогового джойстика
Возможно, вы сталкивались с джойстиком или аналоговым джойстиком в качестве устройства управления игрой. Джойстик (иногда также называемый джойстиком для большого пальца) — это устройство ввода, а аналоговый джойстик — тип джойстика, обеспечивающий двухмерный ввод.
[adsense2]
ПРИМЕЧАНИЕ. В остальной части обсуждения проекта используется только термин «Джойстик».
Типовой модуль джойстика показан на следующем рисунке.
Аналоговый джойстик обычно состоит из потенциометров (по два на каждую ось), и в зависимости от положения этих потенциометров подается ввод (например, на микроконтроллер). Ручка или выступ используются для изменения положения потенциометров.
Компоненты джойстика
На следующем рисунке показаны внутренние компоненты типичного аналогового джойстика. Есть два потенциометра по 10 кОм каждый, а также переключатель, который можно активировать, нажав ручку вниз.
На следующем рисунке показаны внутренние соединения в модуле джойстика. Как упоминалось ранее, он состоит из двух потенциометров 10 кОм, кнопки (переключателя) и разъемов (контактов).
Штифты джойстика
Типичный модуль джойстика состоит из 5 контактов на плате. Это:
- VRx
- VRy
- SW
- +5В
- ЗЕМЛЯ
Здесь контакты +5V и GND должны быть подключены к +5V и GND источника питания (вы можете подключить их к соответствующим контактам на Arduino). VRx и VRy — это клеммы Wiper двух потенциометров.
Наконец, SW — это один конец переключателя, где другой его вывод подключен к GND (на плате джойстика).
На следующем рисунке показана схема контактов модуля джойстика, который я использую. Ориентация штифтов может варьироваться в зависимости от производителя, но штифты будут одинаковыми.
Ориентация штифтов может варьироваться в зависимости от производителя, но штифты будут одинаковыми.
Интерфейс джойстика Arduino
Теперь, когда вы знакомы с компонентами и контактами типичного модуля джойстика, позвольте мне рассказать вам об интерфейсе джойстика Arduino, т.е. как подключить джойстик к Arduino?
Поскольку джойстик по сути представляет собой комбинацию двух потенциометров (и переключателя, конечно), вы можете легко догадаться, как связать его с Arduino, поскольку вы, возможно, уже подключили потенциометр к Arduino.
Принципиальная схема
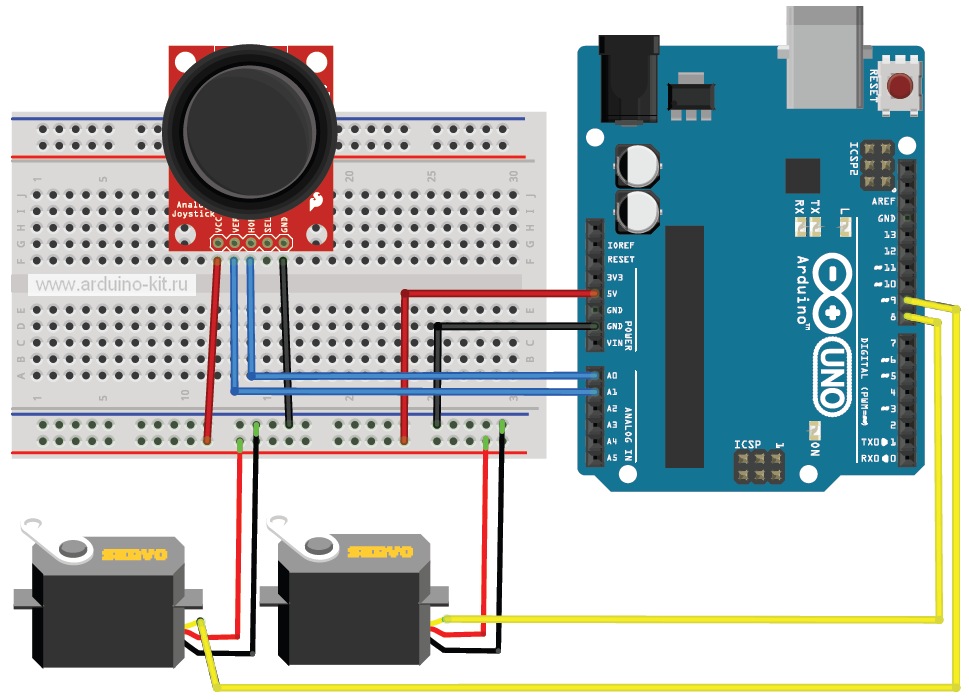
На следующем рисунке показано простое соединение между Arduino UNO и модулем джойстика.
Код
Схема и работа
Я думаю, схема очень понятна. Поскольку контакты VRx и VRy являются выводами потенциометров, они должны быть подключены к контактам аналогового входа Arduino UNO (поскольку они дают нам аналоговые напряжения).
Контакт переключателя, с другой стороны, подключен к контакту цифрового ввода/вывода 2 с внутренним подтягиванием (реализовано с помощью кода).
Приступая к работе схемы, после того, как соединения выполнены и код загружен в Arduino, откройте последовательный монитор. В этом вы можете видеть текущие значения как с потенциометров, так и с переключателя, которые обновляются на регулярной основе (в зависимости от задержки).
Поскольку вход аналоговый и мы преобразуем его в цифровые значения, выход джойстика по оси X и оси Y будет в диапазоне 0-1023.
Следующим шагом в интерфейсе джойстика Arduino является сбор значений с джойстика и использование их для управления устройством, таким как светодиод, двигатель или сервопривод.
Связанный пост: СЕРВОМОТОР ARDUINO
Как управлять серводвигателем с помощью Arduino и джойстика?
Нет смысла просто соединять датчик с Arduino. Вы должны собирать данные с датчика и использовать их соответствующим образом. В случае модуля джойстика вы получаете два потенциометра и переключатель.
Это означает, что вы получаете два разных источника аналоговых входов и один цифровой вход.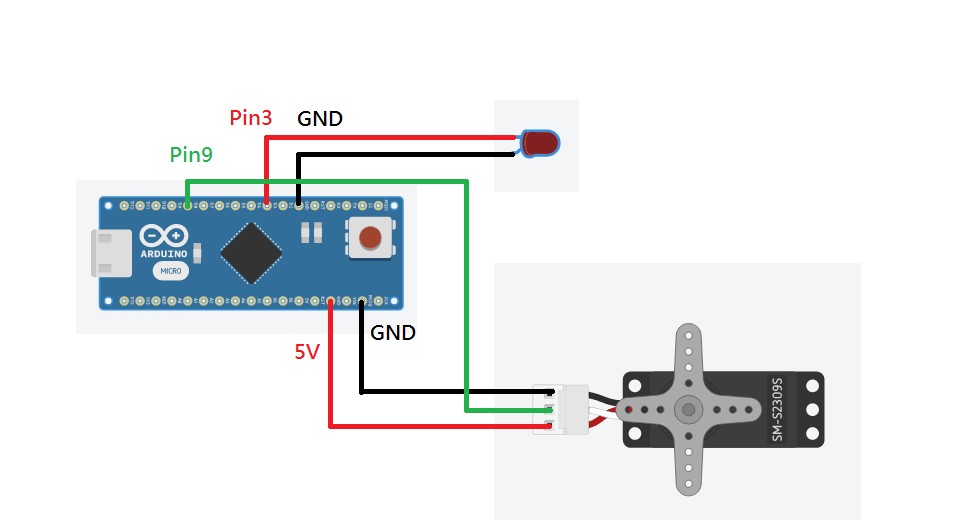 Используя аналоговые входы, т. е. перемещения джойстика по осям X и Y, вы можете управлять различными устройствами, такими как серводвигатель, например, а с помощью цифрового входа (переключателя) вы можете управлять светодиодом, т. е. включать или выключать его.
Используя аналоговые входы, т. е. перемещения джойстика по осям X и Y, вы можете управлять различными устройствами, такими как серводвигатель, например, а с помощью цифрового входа (переключателя) вы можете управлять светодиодом, т. е. включать или выключать его.
Принципиальная схема
На следующей принципиальной схеме показаны необходимые соединения для управления двумя серводвигателями с помощью джойстика и Arduino.
Код
Схема и работа
Соединения по отношению к модулю джойстика такие же, т.е. +5В и GND к +5В и GND Arduino, VRx и VRy к A0 и A1 (аналоговые входы 0 и 1 ) и контакт SW к цифровому контакту 2.
Приближаясь к серводвигателям, их провода +V (красный) и GND (коричневый) подключены к +5V и GND (предпочтительно к другому источнику питания 5V с общим GND с Arduino). Провода управления (желтый или оранжевый) серводвигателей подключаются к цифровым контактам ввода-вывода 10 и 11.
После того, как код загружен в Arduino, он начинает считывать данные с джойстика, и положение обоих сервоприводов по умолчанию устанавливается на 90 (в диапазоне 0-180).