Что такое предельная чувствительность приемника. Как она определяется. Какие факторы влияют на чувствительность. Как измерить чувствительность радиоприемника. Какие существуют методы повышения чувствительности.
Что такое предельная чувствительность приемника
Предельная чувствительность приемника — это минимальный уровень входного сигнала, при котором обеспечивается заданное качество приема информации. Она характеризует способность приемника принимать слабые сигналы.
Предельная чувствительность определяется следующими параметрами:
- Минимальная мощность входного сигнала (в Вт или дБм)
- Минимальная ЭДС сигнала в антенне (в мкВ)
- Минимальная напряженность поля в месте приема (в мкВ/м)
Чем ниже значение предельной чувствительности, тем более слабые сигналы способен принимать приемник.
Факторы, влияющие на чувствительность приемника
На предельную чувствительность радиоприемника влияют следующие основные факторы:

- Собственные шумы входных цепей приемника
- Коэффициент шума первого каскада усиления
- Полоса пропускания приемного тракта
- Коэффициент усиления приемника
- Чувствительность детектора
Ключевую роль играют шумовые характеристики входных цепей и первого усилительного каскада. Чем ниже их собственные шумы, тем выше чувствительность приемника.
Методы измерения чувствительности радиоприемников
Существует несколько основных методов измерения чувствительности радиоприемных устройств:
1. Метод заданного отношения сигнал/шум
При этом методе на вход приемника подается калиброванный тестовый сигнал, уровень которого снижают до тех пор, пока отношение сигнал/шум на выходе не достигнет заданного значения (обычно 10 дБ). Уровень сигнала на входе в этот момент и определяет чувствительность.
2. Метод минимальной выходной мощности
Входной сигнал уменьшают до тех пор, пока выходная мощность приемника не снизится до некоторого минимального уровня (например, 50 мВт). Соответствующий уровень входного сигнала принимают за чувствительность.

3. Метод измерения порогового сигнала
Определяется минимальный уровень входного сигнала, при котором еще возможно выделение полезной информации на фоне шумов. Этот уровень называют пороговой чувствительностью приемника.
Способы повышения чувствительности радиоприемника
Для улучшения чувствительности приемников применяют следующие основные методы:
- Использование малошумящих входных каскадов усиления
- Охлаждение входных цепей для снижения тепловых шумов
- Применение узкополосных фильтров для подавления шумов
- Использование высокодобротных входных контуров
- Оптимизация согласования антенны со входом приемника
- Применение специальных схем обработки сигналов (корреляционный прием и др.)
Ключевую роль играет снижение уровня собственных шумов приемника, особенно во входных цепях и первых каскадах усиления.
Типовые значения чувствительности современных приемников
- Бытовые AM/FM приемники: 1-10 мкВ
- Профессиональные КВ приемники: 0.1-1 мкВ
- УКВ приемники: 0.5-2 мкВ
- Специальные приемники СВЧ диапазона: до -130 дБм
- Радиоастрономические приемники: до -180 дБм
Наилучшей чувствительностью обладают специализированные приемники для радиоастрономии и дальней космической связи.
Влияние чувствительности на дальность связи
Чувствительность приемника напрямую влияет на максимальную дальность радиосвязи. Чем выше чувствительность, тем более слабые сигналы способен принимать приемник, а значит — тем большее расстояние может быть между передатчиком и приемником.
Зависимость дальности связи от чувствительности приемника описывается формулой:
R = √(Pпер * Gпер * Gпр
* λ2 / (16π2 * Pпр.min))где:
- R — дальность связи
- Pпер — мощность передатчика
- Gпер и Gпр — коэффициенты усиления антенн
- λ — длина волны
- Pпр.min — минимальная мощность сигнала на входе приемника (чувствительность)
Таким образом, увеличение чувствительности приемника в 4 раза позволяет увеличить дальность связи в 2 раза при прочих равных условиях.
Чувствительность и помехоустойчивость приемника
Чувствительность и помехоустойчивость приемника тесно связаны между собой. Повышение чувствительности часто приводит к снижению помехоустойчивости, так как приемник начинает реагировать на более слабые помеховые сигналы.
Для обеспечения высокой чувствительности без потери помехоустойчивости применяют следующие методы:
- Узкополосная фильтрация сигнала
- Адаптивная регулировка усиления
- Корреляционная обработка сигнала
- Пространственная селекция сигналов
- Цифровая обработка сигналов
Оптимальное сочетание высокой чувствительности и помехоустойчивости — одна из ключевых задач при проектировании современных радиоприемных устройств.
Перспективы повышения чувствительности приемников
Дальнейшее повышение чувствительности радиоприемных устройств связано со следующими направлениями:
- Применение сверхпроводниковых элементов во входных цепях
- Использование квантовых усилителей и детекторов
- Развитие методов когерентного приема сигналов
- Совершенствование алгоритмов цифровой обработки сигналов
- Применение систем с пространственно-временной обработкой сигналов
Потенциально достижимый уровень чувствительности ограничивается фундаментальными физическими пределами, связанными с квантовой природой электромагнитного излучения. Приближение к этим пределам — одна из важнейших задач современной радиотехники.
Основы радиолокации — Чувствительность приемника
Чувствительность приемника
Способность радиолокационного приемника принимать слабые сигналы характеризуется показателем, который называется «чувствительность приемника». Стандартизованого определения этого термина не существует и его трактовка зависит от условий, при которых проводятся измерения, направленные на получение оценки данного свойства радиолокатора. В спецификациях производители часто используют аббревиатуру MDS в качестве обозначения измеряемой величины. Эта аббревиатура может имет одно из двух возможных значений:
Минимальный обнаруживаемый сигнал (англ. Minimum Detectable Signal, MDS).
Этот параметр часто используют для оценки предельной чувствительности приемника Prmin.
Как понятно из названия, данный параметр — это минимальный уровень принимаемого сигнала,
при котором обеспечивается надежное обнаружение сигнала в присутствии белого шума.
Минимальный различимый сигнал (англ. Minimum Discernible Signal, MDS).
Под этим термином также понимают минимальный уровень сигнала, при котором он может быть обнаружен.
Однако в данном случае речь идет о радиолокаторах,
в которых обнаружение эхо-сигнала цели на фоне шумов выполняется человеком-оператором.
При этом могут иметь место ситуации,
когда уровень минимального различимого сигнала меньше уровня минимального обнаруживаемого сигнала.
Для оценки систем, где онаружение эхо-сигнала цели выполняется оператором, также применяют такие параметры как «минимальный видимый сигнал» и «тангенциальная чувствительность». Обнаружение полезного сигнала всегда происходит в присутствии мешающих сигналов. Таковыми могут быть сигналы, отраженные от поверхности земли или от морской поверхности, от метеообразований, активные помехи и, наконец, тепловые шумы приемника. Последние имеют место всегда, в отличие от предыдущих, которые могут не присутствовать во всех возможных ситуациях. Поэтому именно мощность внутренних шумов используется при определении чувствительности приемника и максимальной дальности действия радиолокатора. При этом максимальной дальностью действия считают такую дальность, когда полезный сигнал перестает выделяться на фоне внутренних шумов.
Приведенное выше условие определяет теоретическую или потенциальную максимальную дальность действия. Практически же дальность действия радиолокатора будет отличаться от этого значения из-за потерь, вызываемых различными факторами. К таким факторам относятся системные потери, неточности изготовления антенн, нелинейность приемника, потери при распространении электромагнитных волн в атмосфере, внешние источники шума, такого как активные помехи.
Минимальный различимый сигнал
Как уже упоминалось, данный параметр используют, когда обнаружение сигналов ведет человек-оператор по индикаторному устройству радиолокатора. Очевидно, для этого необходимо, чтобы уровень полезного сигнала был хотя бы немного выше уровня шумов. Минимальный различимый сигнал определяют как сигнал в антенне, уровень которого обеспечивает появление на индикаторе заметной (различимой) отметки.
Данный параметр определяют по индикатору А-типа или по индикатору кгругового обзора, как правило, в дБм. Типичные значения минимального различимого сигнала лежат в интервале −110 … −113 дБм, что соответствет очень малым сигналам. Однако точность оценки такого параметра может искажаться в силу субъективных факторов.
средний
уровень шума
MDS
3 дБ
Рисунок 1. Оценка отношения «сигнал-шум» при помощи осциллографа
средний
уровень шума
MDS
3 дБ
Рисунок 1. Оценка отношения «сигнал-шум» при помощи осциллографа
Минимальный обнаруживаемый сигнал
Минимальный обнаруживаемый сигнал характеризуется уровнем мощности (Pemin) эхо-сигнала в антенне, при котором на выходе усилителя промежуточной частоты (непосредственно перед обнаружением) обеспечивается уровень сигнала, превышающий средний уровень шума на 3 дБ (Рисунок 1). Данный параметр также выражается в дБм. Типичные значения: −100 … −103 дБм.
На фактическое значение минимального обнаруживаемого сигнала (Pemin) оказывают влияние целый ряд факторов, которые, в конечном итоге, определяют статистический характер процесса обнаружения сигнала.
Для улучшения характеристик обнаружения радиолокатора значительные усилия затрачиваются при разработке входных каскадов его приемного тракта, имеющих низкий уровень внутренних шумов (малошумящие усилители). Однако какого бы низкого уровня внутреннего шума ни удавалось бы достичь во входных каскадах, последующие каскады приемника, а также линия передачи (волноводный тракт) вносят свой вклад в общий уровень шума приемника. Кроме этого, дополнительным источником шумов является антенна, а также антенное укрытие (при наличии).
Предельная чувствительность — приемник — Большая Энциклопедия Нефти и Газа, статья, страница 1
Предельная чувствительность — приемник
Cтраница 1
Предельная чувствительность приемника может быть охарактеризована пороговым потоком — мощностью излучения в ваттах, которая вызывает на выходе приемника сигнал, равный по величине эффективному значению шума; в настоящее время более употребительно понятие пороговая чувствительность. [2]
Предельная чувствительность приемников в сантиметровом диапазоне составляет 10 — 12 — МО-13 вт, а в дециметровом — 10 — 13 — МО-14 вт. [3]
Для определения предельной чувствительности приемника нужно измерить мощность сигнала на его входе, при которой мощность сигнала на выходе усилителя промежуточной частоты ( линейной части приемника) равна мощности шумов. [4]
Определить величину предельной чувствительности приемника Рс Пр, если известно, что коэффициент шума N 13 дБ, полоса пропускания 2Д / 1 1 МГц и Т 300 К. [5]
Полученные выражения (1.14) и (1.16) показывают, что наилучшую предельную чувствительность приемника ( численные значения Яс П ( и Uc, минимальные) можно обеспечить при минимальном коэффициенте шума и узкой полосе пропускания. [6]
Мощность шумов будет равна мощности сигнала, величина которого определит предельную чувствительность приемника. [7]
Из этого выражения следует, что снизить Т2, а следовательно, повысить предельную чувствительность приемника можно, как уменьшая шумовую температуру ТА, так и уменьшая шумовую температуру входного тракта приемника, которая в основном определяет Тпр. В свою очередь, уменьшение шумовой температуры входного тракта, куда входит МШУ, только тогда может способствовать заметному снижению шумовой температуры Т % всей системы, когда значения Г ] р ТА или они соизмеримы. Если же ТА Тцр, то влияние собственных шумов приемника на чувствительность незначительно и снижение Тар не дает ощутимого результата. [8]
Помеха типа белого шума, возникающая от флуктуации в электронных лампах, очень распространена, в частности в аппаратуре связи, и ограничивает предельную чувствительность приемника. [9]
Трудности усиления сверхвысоких частот приводят к тому, что обычно антенна связывается непосредственно со смесительным каскадом. Результирующая предельная чувствительность приемника в этом случае определяется в значительной степени первым каскадом у. [11]
МШУ) СВЧ, таких как квантовых, параметрических и на туннельных диодах, представляется наиболее целесообразным. И действительно, с помощью МШУ удалось повысить предельную чувствительность приемников СВЧ на один — два порядка. Однако одностороннее снижение собственных шумов радиоприемника не является единственным способом повышения его чувствительности; по мере снижения шумов радиоприемника все в большей мере сказываются шумовые характеристики антенны, и они в конечном счете ограничивают дальнейшее повышение чувствительности. Шумовые свойства антенны, которые оцениваются шумовой температурой Тр. [12]
По формуле (1.28) находят лучистый поток абсолютно черного тела с площадью 5 в пределах полусферы. Это бывает необходимо при определении чувствительности приемников инфракрасного излучения. Очевидно, что предельная чувствительность приемника к излучению определяется той минимальной облученностью его поверхности, на которую еще реагирует приемник. [13]
Страницы: 1
Чувствительность радиоприемного устройства кратко Устройства приема и…
Сразу хочу сказать, что здесь никакой воды про чувствительность, и только нужная информация. Для того чтобы лучше понимать что такое чувствительность,чувствительность радиоприемного устройства , настоятельно рекомендую прочитать все из категории Устройства приема и обработки радиосигналов, Передача, прием и обработка сигналов
Одним из важнейших показателей качества тракта приема является чувствительность приемника. Она характеризует способность приемника принимать слабые сигналы. Чувствительность приемника определяется как минимальный уровень входного сигнала устройства, необходимый для обеспечения требуемого качества полученной информации. Качество может быть оценено заданной битовой вероятностью ошибки (BER), вероятностью приема ошибочного сообщения (MER) или отношением сигнал -шум SNR (Signal-to-Noise Ratio) на входе демодулятора приемника. Если чувствительность приемника ограничивается внутренними шумами, то ее можно оценить реальной или предельной чувствительностью приемника, коэффициентом шума или шумовой температурой.
Чувствительность приемника с небольшим усилением, на выходе которого шумы практически отсутствуют, определяется э.д.с, (или номинальной мощностью) сигнала в антенне (или ее эквиваленте), при которой обеспечивается заданное напряжение (мощность) сигнала на выходе приемника.
Чувствительность приемника определяется коэффициентом его усиления КУС. Приемник должен обеспечивать усиление даже самых слабых входных сигналов до выходного уровня, необходимого для нормального функционирования устройства, однако, на входе приемника действуют помехи и шумы, которые также усиливаются в приемнике и могут ухудшать качество его функционирования. Кроме того, на выходе приемника появляются его усиленные внутренние шумы. Чем меньше внутренние шумы, тем лучше качество приемника, тем выше чувствительность приемника.
Реальная чувствительность приемника равна э.д.с. (или номинальной мощности) сигнала в антенне, при которой напряжение (мощность) сигнала на выходе приемника превышает напряжение (мощность) помех в заданное число раз.Предельная чувствительность приемника равна э.д.с. или номинальной мощности РАП сигнала в антенне, при которой на выходе его линейной части (т. е. на входе детектора), мощность сигнала равна мощности внутреннего шума.
При задании чувствительности приемника в виде э.д.с., она измеряется в микровольтах. Современные приемники мобильной связи обладают чувствительностью на уровне десятых долей микровольта. Способ задания чувствительности приемника в виде э.д.с. приводит к тому, что при различном входном сопротивлении приемника мы будем получать различное значение э.д.с. Поэтому, несмотря на то, что все современные приемники систем мобильной связи имеют входное сопротивление 50 Ом, чувствительность приемников задается в терминах мощности сигнала на входе приемника. Чувствительность определяется как отношение мощности на входе приемника к уровню мощности 1 мВт и выражается в логарифмическом масштабе в дБм.
(дБм)
Предельную чувствительность приемника можно также характеризовать коэффициентом шума N0, равным отношению мощности шумов, создаваемых на выходе линейной части приемника эквивалентом антенны (при комнатной температуре T0 = 290 К) и линейной частью, к мощности шумов, создаваемых только эквивалентом антенны . Об этом говорит сайт https://intellect.icu . Очевидно,
, (1)
где k = 1,38 • 10–23 Дж/град — постоянная Больцмана;
Пш — шумовая полоса линейной части приемника, Гц;
РАП — мощность сигнала, Вт.
Из (1) видно, что мощность сигнала, соответствующую его предельной чувствительности и отнесенную к единице полосы частот, можно выразить в единицах kT0:
, (2)
Предельную чувствительность приемника можно также характеризовать шумовой температурой приемника Тпр, на которую надо дополнительно нагреть эквивалент антенны, чтобы на выходе линейной части приемника мощность создаваемых им шумов равнялась мощности шумов линейной части. Очевидно,, откуда
(3)
На реальную антенну воздействуют внешние шумы, номинальная мощность которых ,
где ТA — шумовая температура антенны. Поэтому на выходе линейной части
Для получения равенства мощностей сигнала и шумов необходима мощность
Чувствительность приемника характеризует его способность принимать слабые сигналы.
Количественно чувствительность оценивается двумя способами:
1) Минимальной ЭДС модулированного сигнала в эквиваленте приемной антенны или минимальной напряженностью поля . Такой случай характерен для приемников НЧ — ОВЧ, работающих с открытой антенной. используется для оценки чувствительности при применении магнитных и штыревых антенн;
2) Минимальной мощностью сигнала на входе приемника. Такой случай характерен преимущественно для приемников УВЧ и СВЧ.
В качестве эквивалента антенны применяют двухполюсники с усредненными параметрами, близкими к вероятным параметрам реальной антенны. На рисунке а) представлен эквивалент открытой антенны вещательных приемников НЧ — ВЧ, где R1=50 Ом; R2=320 Ом; C1=125 пФ; С2=400 пФ; L=20 мкГн.
На НЧ — СЧ из-за малости реактивного сопротивления XL можно использовать упрощенную схему (рис. б), а на ВЧ из-за большого XL и малых и эквивалент содержит только сопротивление R0=R1+R2 (рис. в). Эквивалентом антенны в виде полуволнового вибратора служит резистор сопротивлением 75 Ом.
Pисунок 3.1.
Различают чувствительность: ограниченную усилением, реальную и пороговую чувствительность приемника.
а) Чувствительность, ограниченная усилением.
Чувствительность, ограниченная усилением, характерна для приемников со сравнительно малым усилением, принимающих сильные сигналы, т.е. в условиях, когда помехи мало влияют на прием. Она определяется при данной мощности на выходе приемника.
Для приемников аналоговых сигналов (например, звукового радиовещания) различают номинальную и нормальную выходную мощность. Номинальная мощность Pc.н. есть наибольшая мощность, соответствующая 100%-й глубине модуляции входного сигнала при нелинейных искажениях не выше заданной нормы. Нормальная мощность Рср соответствует 30%-й глубине модуляции входного сигнала и составляет 10% от Pc.н..
Определим чувствительность приемника, ограниченную усилением подключенного к эквиваленту открытой антенны при приеме АМ-сигналов.
Коэффициент усиления приемника
где m — коэффициент модуляции сигналов;
— эффективное напряжение несущей частоты сигнала в эквиваленте антенны;
— напряжение сигнала на выходе приемника.
Обозначим через напряжение , необходимое для создания на выходе приемника напряжения .
Тогда
(*)
Следовательно, чувствительность, ограниченная усилением, с ростом К повышается ( уменьшается).
Когда речь идет об оценке чувствительности, то часто под понимают напряжение на входе детектора , тогда
—
где К — коэффициент усиления ВЧ тракта приемника, расположенного до детектора.
б) Реальная и пороговая чувствительность.
Реальная чувствительность приемника учитывает влияние его собственных шумов и определяется минимальным уровнем сигнала на входе при заданных на выходе уровне сигнала и его превышении над шумом.
Пороговая чувствительность определяется при отношении сигнал/шум на выходе=1.
Для определения реальной чувствительности необходимо определить как влияет «К» на уровень шумов на выходе ( ). Для этого реальный шумящий приемник, подключенный к шумящему эквиваленту антенны, заменим нешумящим приемником с генератором собственных шумов , приведенных к его входу, который вместе с генератором шумов эквивалента антенны образует генератор суммарного шумового напряжения , приведенного к эквиваленту антенны с эффективным напряжением в полосе пропускания приемника
Pисунок 3.2.
Если , то с учетом (*)
При заданном в эквиваленте антенны необходимо обеспечить превышение сигнала . Отсюда реальная чувствительность .(+)
Pисунок 3.3.
На рисунке нанесены зависимости (*) и (+). Точка О их пересечения соответствует критическому коэффициенту усиления Ккр.
При К<Ккр усиление мало, , а ,и реальная чувствительность ограничена усилением, т.е. совпадает с .
При К>Ккри, если , то ,что не соответствует определению понятия реальной чувствительности. Чтобы обеспечить равенство , надо увеличит до значения .
Это означает, что реальная чувствительность не зависит от К и определяется собственными шумами приемника. С увеличением К>Ккр растет, как и , а сохраняется постоянным.
Чувствительность приемника зависит от частоты настройки. При этом номинальная реальная чувствительность соответствует наибольшему значению .
Для вещательных приемников в зависимости от класса качества значения номинальной реальной чувствительности в диапазоне НЧ и СЧ лежат в пределах 50 … 300 мкВ; в диапазоне ВЧ — 50 … 200 мкВ; в диапазонах ОВЧ и УВЧ — 3…30 мкВ; для профессиональных слуховых приемников телеграфных сигналов диапазона ВЧ — до 0,1 мкВ; для TV приемников — 200 … 500 мкВ.
См. также
Статью про чувствительность я написал специально для тебя. Если ты хотел бы внести свой вклад в развии теории и практики, ты можешь написать коммент или статью отправив на мою почту в разделе контакты. Этим ты поможешь другим читателям, ведь ты хочешь это сделать? Надеюсь, что теперь ты понял что такое чувствительность,чувствительность радиоприемного устройства и для чего все это нужно, а если не понял, или есть замечания, то нестесняся пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Устройства приема и обработки радиосигналов, Передача, прием и обработка сигналов
ЧТО ТАКОЕ РЕАЛЬНАЯ ЧУВСТВИТЕЛЬНОСТЬ? | Техника и Программы
Чувствительность усилителя зависит от коэффициента усиления: она теп выше, чем коэффициент больше. Однако чувствительность радиоприемного устройства определяется не только его способностью усиливать принимаемые сигналы. Если бы такое устройство было абсолютно бесшумным, тогда действительно его чувствительность определялась только способностью усиливать принятые радиосигналы. Отсоедините антенну от радиоприемника и установите регулятор громкости на максимум: в динамической головке громкоговорителя появится звук, напоминающий звук сыплющегося песка или мелкой крупы. Это собственный шум радиоприемника. Он-то и ставит предел реальной чувствительности радиоприемника. Ведь можно услышать только тот принятый сигнал,, громкость которого будет не меньше громкости шума. В радиовещании принято, что уровень громкости радиопередачи должен превышать уровень шумов-на выходе радиоприемника на 20 дБ (в 10 раз), а в диапазоне УКВ на 26 дБ (в 20 раз).
Основная причина шумов радиоприемного устройства — тепловое хаотичное движение электрически заряженных частиц. Резисторы, транзисторы, электронные лампы, колебательные контуры, даже провода, короче говоря, весь радиоприемник от антенны до головки громкоговорителя создает шумы. Особенно опасен шум антенны, входного устройства и первого усилительного каскада, потому что он усиливается всеми остальными каскадами приемника. Создают шум и индустриальные помехи, имеющие широкий диапазон частот, а потому попадающие в полосу пропускания приемника, сигналы мощных радиостанций, а также радиоизлучение солнца и даже Галактики. Все шумы накладываются на принимаемый сигнал и снижают реальную чувствительность приемника. Поэтому чувствительность принято характеризовать наименьшим уровнем входного сигнала, обеспечивающим на выходе УПЧ заданное соотношениесигнал-шум. Однако в радиолюбительской практике, а также при измерений параметров радиовещательных приемников чувствительность часто характеризуют таким наименьшим уровнем сигнала на входе приемника, при котором обеспечивается стандартная выходная мощность приемника 50 мВт при заданном соотношении сигнал-шум и максимальном усилении УЗЧ, т. е. учитывается и шум УЗЧ.
В качестве стандартной мощности приняты 50 или 5 мВт — для приемника с максимальной выходной мощностью до 150 мВт. Однако измерять непосредственно мощность неудобно, поэтому измеряют выходное напряжение. Зная номинальное сопротивление Яном звуковой катушки громкоговорителя (оно указано в технической документации на громкоговоритель), по формуле Uвых = ~~v PRkom или по графику на рис. 61 можно определить выходное напряжение, соответствующее мощности 50 мВт.
Рис. 61. Зависимость выходного напряжения от полного сопротивления звуковой катушки
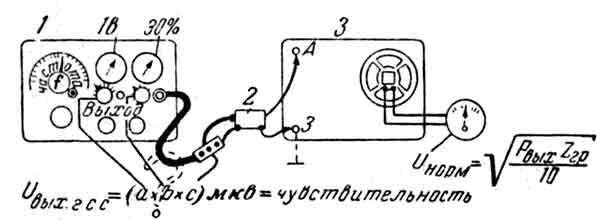
Измеряют реальную чувствительность в экранированной камере, исключающей наведение посторонних сигналов на антенный вход приемника. В любительских условиях роль такой камеры в какой-то степени может играть комната в современном панельном доме, стены которого пронизаны металлической арматурой. На вход радиоприемника от ГСС через согласующее устройство подают высокочастотный сигнал. При этом качество согласования выхода генератора со входом приемника играет решающую роль. (Схемы эквивалентов антенны показаны на рис. 57.) Выходное сопротивление генератора ГСС-6 (Г4-1) при использовании внешнего делителя равно внутреннему сопротивлению этого делителя: на зажиме «10» — 80 Ом, на зажиме «1» — 8Ом, на зажиме «0,1» — 0,8 Ом. При соединении эквивалента антенны с зажимом «10» внешнего делителя резистор R3 может отсутствовать; то же будет и при присоединении эквивалента антенны непосредственно к выходному гнезду генератора ГСС-6 (безвыносного делителя). При подключении эквивалента к зажиму «1» внешнего делителя сопротивление резистора R3 должно составлять 80 — 8=72 Ом, при подключении к зажиму «0,1» 80 — 0,8 = 79,2 Ом. При измерении чувствительности в УКВ диапазоне выходное сопротивление ГСС обычно равно 75 Ом, поэтому надо пользоваться эквивалентом антенны, схема которого показана на рис. 57,г (без дополнительных сопротивлений). При использовании генератора поля (см. рис. 58) рамку надо присоединять к выходному гнезду генератора, а не к выносному делителю. Эквивалент антенны должен быть тщательно экранирован, находиться непосредственно у антенного ввода радиоприемника и подключаться к нему стандартным разъемом. Экран эквивалента соединяют с зажимом «Земля» приемника проводником длиной 10 — 20 мм, а выносной делитель генератора подключают к эквиваленту короткими проводниками. Только при соблюдении таких условий можно измерить чувствительность приемника с достаточной точностью.
К звуковой катушке головки громкоговорителя или ее эквиваленту подключают индикатор выхода, а лучше — электронный вольтметр, реагирующий на среднеквадратичное значение переменного напряжения. При измерении напряжения шумов, форма сигнала которых хаотична, градуировка вольтметра, реагирующего на амплитудное или средневыпрямленное напряжение, будет неверна. Но можно обойтись и обычным вольтметром, так как погрешность измерения чувствительности зависит главным образом от точности определения выходного напряжения ГСС, которая редко бывает лучше 10%.
Измерения производят в трех точках диапазона: на краях и в середине. Приемник настраивают на нужную частоту, а регулятор громкости — на максимум (регулятор полосы пропускания УПЧ устанавливают в положение наиболее широкой полосы; это же относится и к регуляторам тембра). В ГСС включают AM частотой 1000 Гц и глубиной 30%. Настраивают ГСС на частоту радиоприемника по максимальному отклонению стрелки индикатора выхода. Затем регулируют уровень выходного напряжения ГСС таким образом, чтобы индикатор выхода зафиксировал напряжение, соответствующее стандартной выходной мощности. Чувствительность приемника будет равна выходному напряжению ГСС ( в микровольтах), снятому по шкале аттенюатора.
Далее выясняют, реальная ли это чувствительность, т. е. соответствует ли она заданному соотношению сигнал-шум. Ведь индикатор выхода измеряет результирующее напряжение, складывающееся из напряжений сигнала Ue, шумов Um и внешних помех Uп. Чтобы измерить эти составляющие, модуляцию ГСС выключают. Показания индикатора выхода при этом заметно уменьшатся и будут соответствовать значению (U2m+U2n)-2, так как в это время напряжение звуковой частоты на нагрузке детектора приемника от сигнала ГСС отсутствует. Затем измеряют напряжение собственных шумов приемника, для чего замыкают накоротко антенный вход приемника. Теперь внешние помехи уже не попадают в приемник, и показания индикатора выхода определяются только внутренними шумами. Вычисляют отношение (U2m+U2u/Um)-2. Если оно хотя бы в 4 раза меньше требуемого отношения сигнал-шум, то действием внешней помехи Un пренебрегают и полученное ранее значение чувствительности является реальной чувствительностью приемника. Если же это отношение более заданного, то это означает, что шумы приемника надо уменьшить. Для этого уменьшают усиление приемника, например, регулятором УЗЧ, замыкают антенный вход приемника и измеряют напряжение Um внутренних шумов. Затем не изменяя положения регулятора громкости приемника, размыкают антенный вход, включают в ГСС модуляцию и регулируют его выходное напряжение до тех пор, пока индикатор выхода приемника отметит напряжение, соответствующее стандартной выходной мощности 50 мВт. Определяют новое отношение Ue!Umили выражение с учетом напряжения помех Un– Если оно соответствует заданному значению, то получается значение реальной чувствительности приемника. Если оно опять хуже заданного, то снова уменьшают усиление приемника и т. д.
При измерении чувствительности УКВ радиовещательных приемников с ЧМ ТСС должен обеспечивать следующие параметры ЧМ: частота модуляции 1000 Гц, девиация частоты (полоса качания) 15 кГц.
Какой же чувствительностью должен обладать радиоприемник? Это зависит -от его назначения и класса. Приемники, предназначенные для любительской KB радиосвязи, имеют очень высокую чувствительность (около 1 — 3 мкВ). Это предельная чувствительность приемника, работающего с обычной антенной, так как слишком велики воспринимаемые ею внешние помехи. Чувствительность радиовещательных приемников высшего класса в диапазонах ДВ, СВ и KB 50 мкВ, а для более низких классов 200 — 300 мкВ. Если прием ведется на внутреннюю магнитную антенну, то чувствительность приемника должна находиться в пределах 1 — 3 мВ/м. Чувствительность радиовещательных приемников в УКВ диапазоне составляет 10 — 30 мкВ, а у радиовещательных приемников высшего класса даже 5 мкВ.
Отметим, что чаще всего измерения дают завышенный результат, т. е. действительная чувствительность приемника хуже, чем показывают приборы. Основной источник погрешности измерений, особенно у чувствительных приемников, проникновение сигнала на вход приемника помимо эквивалента антенны. И еще одно замечание: если измерение чувствительности дает весьма низкий результат, к тому же обнаружена большая неравномерность чувствительности по диапазону, а предварительные измерения коэффициентов усиления отдельных блоков приемника показали нормальную работу, то причиной низкой чувствительности супергетеродинного приемника будет скорее всего плохое сопряжение настроек входных и гетеродинных контуров.
3.3 Чувствительность приемника
Одним из важнейших показателей качества тракта приема является чувствительность приемника. Чувствительность приемника характеризует способность приемника принимать слабые сигналы. Чувствительность приемника определяется как минимальный уровень входного сигнала устройства, необходимый для обеспечения требуемого качества полученной информации. Если чувствительность приемника ограничивается внутренними шумами, то ее можно оценить реальной или предельной чувствительностью приемника, коэффициентом шума или шумовой температурой.
Чувствительность приемника с небольшим усилением, на выходе которого шумы практически отсутствуют, определяется э.д.с, (или номинальной мощностью) сигнала в антенне (или ее эквиваленте), при которой обеспечивается заданное напряжение (мощность) сигнала на выходе приемника.
Чувствительность приемника определяется коэффициентом его усиления КУС. Приемник должен обеспечивать усиление даже самых слабых входных сигналов до выходного уровня, необходимого для нормального функционирования устройства, однако, на входе приемника действуют помехи и шумы, которые также усиливаются в приемнике и могут ухудшать качество его функционирования. Кроме того, на выходе приемника появляются его усиленные внутренние шумы. Чем меньше внутренние шумы, тем лучше качество приемника, тем выше чувствительность приемника.
Реальная чувствительность приемника равна э.д.с. (или номинальной мощности) сигнала в антенне, при которой напряжение (мощность) сигнала на выходе приемника превышает напряжение (мощность) помех в заданное число раз. Предельная чувствительность приемника равна э.д.с. или номинальной мощности РАПсигнала в антенне, при которой на выходе его линейной части (т. е. на входе детектора), мощность сигнала равна мощности внутреннего шума.
Предельную чувствительность приемника можно также характеризовать коэффициентом шума N0, равным отношению мощности шумов, создаваемых на выходе линейной части приемника эквивалентом антенны (при комнатной температуре T0 = 300 К) и линейной частью, к мощности шумов, создаваемых только эквивалентом антенны. Очевидно,
, (3.18)
где k = 1,38∙10–23 Дж/град — постоянная Больцмана;
Пш— шумовая полоса линейной части приемника, Гц;
РАП— мощность сигнала, Вт.
Из (3.19) видно, что мощность сигнала, соответствующую его предельной чувствительности и отнесенную к единице полосы частот, можно выразить в единицах kT0:
, (3.19)
Предельную чувствительность приемника можно также характеризовать шумовой температурой приемника Тпр, на которую надо дополнительно нагреть эквивалент антенны, чтобы на выходе линейной части приемника мощность создаваемых им шумов равнялась мощности шумов линейной части. Очевидно,
, (3.2/(4*k*T*Rг)).Где выходной шум (onoise), пересчитанный на вход (inoise = onoise/K(f), где K(f) — коэффициент передачи четырехполюсника) дальше это делится на спектральную плотность мощности входного шума, которую можно рассчитать исходя из выходного сопротивления генератора Rг.
В мультисиме для этого необходимо использовать постобработку результатов моделирования шумов. В постпроцессоре добавляется обработка результатов моделирования шумов по формуле (db((inoise_spectrum)/4/1.38e-23/300/50)/2)
НЧ область очень похожа на фликкер- шум транзистора.
Чтобы получить график с коэффициентом шума, необходимо сначала запустить: Моделирование – Вид анализа – Шумов.
Моделирование – Постпроцессор – Вкладка (Графопостроитель) – Кнопка (Расчитать).
Результат моделирования приведен в виде рисунка 3.13.
Рисунок 3.14– Результат расчета внутреннего шума приемника
С помощью пакета MultiSimоценим коэффициент шума входного каскада РПрУ, предусмотренного ТЗ на курсовой проект. Оценим чувствительность устройства.
Решение: дадим определение чувствительности, это – способность радиоприёмника принимать слабые по интенсивности радиосигналы и количественный критерий этой способности.
— формула для оценкичувствительности,
где — постоянная Больцмана,- абсолютная температура (К),-шумовая полоса частот приемника,дБ — коэффициент шума РПрУ, дБ,- относительная шумовая температура антенны на частоте сигнала.
Определим относительную шумовую температуру антенны на частоте f=17,6375MГц по формуле:
(3.23)
где значения в МГц.
Подставив числовые значения получим:
Теперь можем определить и чувствительность приемника:
,
Сделаем вывод, коэффициент шума приемника по результатам расчета оказалась больше, чем значения внешних шумов. Это так, потому что коэффициент шума приемника зависит от частоты. Чувствительность в большей мере, зависит от внутреннего шума приемника.
Чувствительность приемника определение. Повышение чувствительности радиоприемника
В.Ефремов
В журнале «Ремонт & Сервис» ранее рассматривались общие вопросы построения специальных шкал децибел и проблемы, возникающие при переходе от абсолютных значений к децибельной шкале и наоборот . В качестве практического примера была приведена специальная шкала, часто используемая при проведении измерений сигналов низких частот на нагрузке сопротивлением 600 Ом.
В современной высокочастотной технике большинство генераторов сигналов, предназначенных для проверки чувствительности радиоприемных устройств (РПУ), рассчитаны на работу с 50-омной согласованной нагрузкой и на подключение 75-омной нагрузки через специальные переходные устройства. Уровень ВЧ-напряжения на выходе генератора устанавливается либо ступенями, либо плавно, а шкалы выходного напряжения при этом могут иметь различную градуировку в зависимости от типа генератора. Чувствительность приемников ранее выражали в микровольтах, а в последнее время стали использовать для этого специальные шкалы децибел. В связи с этим на практике иногда возникают трудности, связанные с быстрым переводом и определением конкретных численных значений в различных шкалах.
В литературе рассмотрены высококлассные универсальные приборы, предназначенные для проверки чувствительности РПУ. Они позволяют устанавливать уровни ВЧ-напряжения на выходе и производить перевод их численных значений в различные шкалы автоматически. К сожалению, большинству мелких предприятий, занятых ремонтом электронной аппаратуры, они пока недоступны. Более того, им часто приходится пользоваться приборами, произведенными достаточно давно, но до сих пор отвечающими необходимым техническим требованиям при проведении периодических проверок. К таким приборам можно отнести, например, широко распространенный высокочастотный генератор сигналов Г4-107. Выходное напряжение этого генератора на согласованной нагрузке 50 Ом в режимах НГ и ЧМ можно регулировать от 1 В до 1 мкВ и в режимах АМ и ИМ от 0,5 В до 0,5 мкВ. Регулировка производится дискретно и плавно в пределах каждой ступени. Шаг ступенчатой регулировки равен 1 дБ. При этом шкала ступенчатого аттенюатора проградуирована в децибел-вольтах (дБВ). Он (аттенюатор) позволяет устанавливать уровень выходного ВЧ-напряжения от 0 до -119 дБ. Кроме этого, с помощью внешнего аттенюатора можно дополнительно уменьшить уровень напряжения на 20 дБ, т.е. минимальный уровень довести до -139 дБ.
При практической работе с генератором и определении чувствительности РПУ, для перевода уровня выходного сигнала дБВ в мкВ необходимо использовать две специальные таблицы, которые даются в технической документации . При пользовании ими возникают неудобства, связанные с переводом численных значений дБВ в мкВ и наоборот, что особенно заметно в верхней части таблиц, где значения напряжений в мкВ представлены в виде чисел со степенями. Кроме этого, на практике почти всегда приходится использовать внешний аттенюатор, так как чувствительность современных РПУ может быть выше 1 мкВ. Уровень выходного сигнала генератора при этом будет ниже -119 дБ. Прямой перевод уровней ниже этого значения в прилагаемых таблицах вообще не предусмотрен.
Уровни выходного сигнала в дБВ расположены в центральной части таблиц. Им соответствуют значения в единицах, указанных стрелками, т.е. в мВ вверху и в мкВ внизу таблицы. При этом для наглядности соответствующие ряды имеют одинаковое цветовое оформление. Такие же таблицы можно изготовить для других приборов, имеющих ступенчатые аттенюаторы с подобными шкалами. Уровни менее 0,1 мкВ округлены до более реальных с практической точки зрения величин.
Как уже было отмечено выше, в последнее время в технической документации и в литературе уровень ВЧ-сигнала часто указывают в децибельных шкалах. Так, чувствительность РПУ указывают в дБмкВ. Нулевой уровень в этом случае соответствует напряжению ВЧ-сигнала 1 мкВ при сопротивлении нагрузки 50 Ом. Переход к значениям уровня сигнала в мкВ или мВ для этой шкалы можно производить по табл. 1б.
Широкое распространение в радиотехнических измерениях получила специальная шкала дБм. Нулевой уровень этой специальной шкалы соответствует мощности ВЧ-сигнала 1 мВт, рассеянной на 50-омной резистивной нагрузке. При этом, как и в предыдущих случаях, уровни сигнала ниже этого значения будут иметь отрицательный знак. Выразить уровень ВЧ-сигнала в дБм можно, используя одно из математических выражений:
При проведении радиотехнических измерений на практике перевод уровня ВЧ-сигнала из мкВ и мВ в дБм удобно осуществлять также с помощью специальных диаграмм или таблиц. Диаграммы, приводимые в литературе , дают наглядное представление о соотношениях между различными шкалами, но, к сожалению, не позволяют определить точное числовое значение уровня сигнала. Табл. 3 предназначена для перевода уровней ВЧ-сигналов, выраженных в мВ и мкВ, в дБм или наоборот.
Дискретность и числовые значения уровней, представленных в мВ и мкВ, соответствуют табл. 1, т.е. подходят для работы с генератором Г4-107 и другими приборами, имеющими подобную шкалу уровней. В центральной части табл. 3 приведены значения уровней сигналов в дБм, перевод которых осуществляется так же, как и в предыдущих таблицах. Практическое использование приводимых таблиц, в особенности табл. 1 и 3, не ограничивается только приведенными выше примерами.
Литература
1. В. Ефремов. Практическое использование специальных шкал
децибел. Ремонт & Сервис, 2000, №
1. с. 55-56.
2. А. Дубинин. Сервис-мониторы IFP-7550. Ремонт&Сервис, 1999, № 11, с. 55-56.
3. Генератор сигналов высокочастотный Г4-107. Техническое описание и инструкция по эксплуатации.
4. Э. Ред. Справочное пособие по высокочастотной схемотехнике, М.: Мир, 1990, с. 171.
Одним из важнейших показателей качества тракта приема является чувствительность приемника. Чувствительность приемника характеризует способность приемника принимать слабые сигналы. Чувствительность приемника определяется как минимальный уровень входного сигнала устройства, необходимый для обеспечения требуемого качества полученной информации. Если чувствительность приемника ограничивается внутренними шумами, то ее можно оценить реальной или предельной чувствительностью приемника, коэффициентом шума или шумовой температурой.
Чувствительность приемника с небольшим усилением, на выходе которого шумы практически отсутствуют, определяется э.д.с, (или номинальной мощностью) сигнала в антенне (или ее эквиваленте), при которой обеспечивается заданное напряжение (мощность) сигнала на выходе приемника.
Чувствительность приемника определяется коэффициентом его усиления К УС. Приемник должен обеспечивать усиление даже самых слабых входных сигналов до выходного уровня, необходимого для нормального функционирования устройства, однако, на входе приемника действуют помехи и шумы, которые также усиливаются в приемнике и могут ухудшать качество его функционирования. Кроме того, на выходе приемника появляются его усиленные внутренние шумы. Чем меньше внутренние шумы, тем лучше качество приемника, тем выше чувствительность приемника.
Реальная чувствительностьприемника равна э.д.с. (или номинальной мощности) сигнала в антенне, при которой напряжение (мощность) сигнала на выходе приемника превышает напряжение (мощность) помех в заданное число раз. Предельная чувствительность приемника равна э.д.с. или номинальной мощности Р АП сигнала в антенне, при которой на выходе его линейной части (т. е. на входе детектора), мощность сигнала равна мощности внутреннего шума.
Предельную чувствительность приемника можно также характеризовать коэффициентом шума N 0 , равным отношению мощности шумов, создаваемых на выходе линейной части приемника эквивалентом антенны (при комнатной температуре T 0 = 300 К) и линейной частью, к мощности шумов, создаваемых только эквивалентом антенны. Очевидно,
где k = 1,38∙10 –23 Дж/град — постоянная Больцмана;
П ш — шумовая полоса линейной части приемника, Гц;
Р АП — мощность сигнала, Вт.
Из (3.19) видно, что мощность сигнала, соответствующую его предельной чувствительности и отнесенную к единице полосы частот, можно выразить в единицах kT 0:
Предельную чувствительность приемника можно также характеризовать шумовой температурой приемника Т пр, на которую надо дополнительно нагреть эквивалент антенны, чтобы на выходе линейной части приемника мощность создаваемых им шумов равнялась мощности шумов линейной части. Очевидно,
откуда (3.21)
На реальную антенну воздействуют внешние шумы, номинальная мощность которых
где Т A — шумовая температура антенны. Таким образом реальная чувствительность приемника:
Предельная чувствительность при
Рисунок 3.13–График зависимости относительной шумовой температуры антенны от частоты
По рисунку 3.13 видим, что на высокой частоте коэффициент относительной шумовой температуры антенны уменьшается и остается неизменной, а также ее роль влияния на чувствительность приемника уменьшается.2/(4*k*T*Rг)).Где выходной шум (onoise), пересчитанный на вход (inoise = onoise/K(f), где K(f) — коэффициент передачи четырехполюсника) дальше это делится на спектральную плотность мощности входного шума, которую можно рассчитать исходя из выходного сопротивления генератора Rг.
В мультисиме для этого необходимо использовать постобработку результатов моделирования шумов. В постпроцессоре добавляется обработка результатов моделирования шумов по формуле (db((inoise_spectrum)/4/1.38e-23/300/50)/2)
НЧ область очень похожа на фликкер- шум транзистора.
Чтобы получить график с коэффициентом шума, необходимо сначала запустить: Моделирование – Вид анализа – Шумов.
Моделирование – Постпроцессор – Вкладка (Графопостроитель) – Кнопка (Расчитать).
Результат моделирования приведен в виде рисунка 3.13.
Рисунок 3.14– Результат расчета внутреннего шума приемника
С помощью пакета MultiSimоценим коэффициент шума входного каскада РПрУ, предусмотренного ТЗ на курсовой проект. Оценим чувствительность устройства.
Решение: дадим определение чувствительности, это – способность радиоприёмника принимать слабые по интенсивности радиосигналы и количественный критерий этой способности.
Формула для оценкичувствительности,
где — постоянная Больцмана,- абсолютная температура (К),-шумовая полоса частот приемника,дБ — коэффициент шума РПрУ, дБ,- относительная шумовая температура антенны на частоте сигнала.
Определим относительную шумовую температуру антенны на частоте f=17,6375MГц по формуле:
где значения в МГц.
Подставив числовые значения получим:
Теперь можем определить и чувствительность приемника:
Сделаем вывод, коэффициент шума приемника по результатам расчета оказалась больше, чем значения внешних шумов. Это так, потому что коэффициент шума приемника зависит от частоты. Чувствительность в большей мере, зависит от внутреннего шума приемника.
Чувствительность является мерой способности радиоприемного устройства обеспечивать прием слабых радиосигналов. Количественно оценивается минимальным значением ЭДС сигнала на входе радиоприемного устройства, при котором имеет место требуемое отношение сигнал-шум на выходе при отсутствии внешних помех.
Чувствительность радиоприёмника, способность радиоприёмника принимать слабые по интенсивности радиосигналы и количественный критерий этой способности. Последний во многих случаях определяется как минимальный уровень радиосигнала в приёмной антенне (эдс, наводимая сигналом в антенне и выражаемая обычно в мв или мкв , либо напряжённость поля вблизи антенны, выражаемая в мв/м ), при котором содержащаяся в радиосигнале полезная информация ещё может быть воспроизведена с требуемым качеством (с достаточными громкостью звучания, контрастностью изображения и т.п.). В простейших радиоприёмниках чувствительность зависит главным образом от степени усиления сигналов в них: с увеличением коэффициента усиления нормальное воспроизведение информации достигается при более слабом радиосигнале ( считается при этом более высокой). Однако в сложных радиоприёмных устройствах (например, связных) такой путь повышения Чувствительность радиоприёмника теряет смысл, поскольку в них интенсивность полезных радиосигналов может оказаться сравнимой с интенсивностью действующих на антенну одновременно с этими сигналами внешних помех радиоприёму , искажающих принимаемую информацию. Предельная Чувствительность радиоприёмника в этом случае называется чувствительностью, ограниченной помехами; она является параметром не только приёмника, но зависит и от внешних факторов. При наиболее благоприятных условиях (главным образом при приёме в диапазоне метровых и более коротких волн и особенно при космической радиосвязи) внешние помехи слабы и основным фактором, ограничивающим Чувствительность радиоприёмника , становятся внутренние флуктуационные шумы радиоприёмника (см. Флуктуации электрические ). Последние в нормальных условиях работы радиоприёмника имеют постоянный уровень, поэтому Чувствительность радиоприёмника , ограниченная внутренними шумами, — вполне определённый параметр; за меру Чувствительность радиоприёмника в этом случае часто принимают непосредственно уровень внутренних шумов, характеризуемый коэффициентом шума или шумовой температурой (см. также Пороговый сигнал ).Чувствительность приемника — одна из главных его характеристик, которая определяет возможность дальнего приема передач. Чем меньше чувствительность, тем «дальнобойнее» приемник. Поэтому применительно к чувствительности обычно пользуются выражениями лучше-хуже вместо больше-меньше, понимая под лучшей чувствительностью такую, которая выражается ее меньшим значением. Существует несколько определений чувствительности, и во избежание путаницы всегда необходимо знать, о какой чувствительности идет речь. Приняты следующие определения: чувствительность, ограниченная усилением; чувствительность, ограниченная синхронизацией; чувствительность, ограниченная шумами.
Чувствительность радиоприемника является параметром, который позволяет оценить возможность приемника принимать слабые сигналы радиостанций. Различают максимальную и реальную чувствительность приемника.
Реальная чувствительность определяет минимальный уровень входного сигнала, при котором обеспечивается стандартная (испытательная) выходная мощность при заданном соотношении напряжения входного сигнала к напряжению шумов. Для отечественных приемников испытательная выходная мощность принята равной 50 или 5 мВт, в зависимости от класса приемника. Заданное соотношение сигнал-шум при измерении реальной чувствительности приемника в диапазонах ДВ, СВ, KB — не менее 20 дБ, на УКВ — не менее 26 дБ.
Чувствительность приемника по напряжению (для наружных антенн) измеряется в микровольтах. Чувствительность приемника тем выше, чем меньше это напряжение. При работе с внутренней (встроенной) антенной чувствительность выражается минимальной напряженностью электрического поля и измеряется в микровольтах или милливольтах на метр (мкВ/м или мВ/м).
Максимальная чувствительность — это чувствительность, ограниченная усилением. Она определяет такой минимальный уровень сигнала, при котором обеспечивается стандартная (испытательная) выходная мощность при установке всех органов управления приемника в положения, соответствующие максимальному усилению. Чувствительность радиоприемника зависит от многих факторов: усилительных свойств всех каскадов тракта приемника, уровня собственных шумов, ширины полосы пропускания и др.
Современные приемники обладают очень высокой чувствительностью. Например, приемники высшего класса в УКВ диапазоне имеют чувствительность 1… 2 мкВ, а в диапазоне KB — 5… 10 мкВ.
Чувствительность радиоприемника обычно выражается в милливольтах на метр (мВ/м) или в микровольтах (мкВ). Наибольшей чувствительностью обладают супергетеродинные радиоприёмники (супергетеродины), в которых с помощью специальных устройств- гетеродина и смесителя-перед детектированием производится преобразование (понижение) частоты радиосигнала, не изменяющее закона модуляции. Полученный в результате преобразования сигнал т. н. промежуточной частоты дополнительно усиливается по ней, после чего детектируется и снова усиливается (по звуковой частоте).
Свойство радиоприемного устройства, позволяющее отличать полезный радиосигнал от радиопомехи по определенным признакам, свойственным радиосигналу, называется избирательностью . Иначе, это способность радиоприемного устройства выделять нужный радиосигнал из спектра электромагнитных колебаний в месте приема, снижая мешающие радиосигналы.
Различают пространственную и частотную избирательности. Пространственная избирательность достигается за счет использования антенны, обеспечивающей прием нужных радиосигналов с одного направления и ослабление радиосигналов с других направлений от посторонних источников. Частотная избирательность количественно характеризует способность радиоприемного устройства выделять из всех радиочастотных сигналов и радиопомех, действующих на его входе, сигнал, соответствующий частоте настройки радиоприемника.
Избирательность — параметр, характеризующий способность радиоприемника принимать и усиливать сигнал рабочей частоты на фоне «мешающих» сигналов других передатчиков, работающих на соседних каналах (частотах). Этот параметр часто путают или смешивают с понятием «помехозащищенность». Помехозащищенность — более широкое, нежели избирательность, понятие. Ведь помехой можно считать как сигнал другого передатчика, который излучает постоянно на соседней частоте, так и кратковременный разряд молнии, при котором излучается очень широкий спектр частот. Но если относительно узкополосный сигнал соседнего передатчика удается нейтрализовать схемотехническими решениями (частотной селекцией или фильтрацией), то широкополосный кратковременный сигнал помехи отфильтровать практически невозможно, и с помехой приходится бороться другими способами, в частности, применяя специальные способы кодирования и последующей обработки информационной составляющей сигнала. Именно на этом принципе построены РСМ-устройства.
Термин «избирательность» в характеристике радиоприемного устройства обычно дополняют словами «по соседнему каналу» и характеризуют его при помощи конкретных физических понятий и величин. Обычно это звучит примерно так: «избирательность приемника по соседнему каналу составляет — 20 dB при расстройке +/- 10 кГц». Физический смысл этой неуклюжей фразы таков: если частота «мешающего» сигнала отличается от «рабочей» частоты на 10 кГц (выше или ниже), то при равных уровнях «полезного» и «мешающего» сигналов на входе приемника, уровень «мешающего» сигнала на выходе приемника будет на 20 dB (в 10 раз) меньше уровня «полезного» сигнала. А если этот параметр будет равен -40 dB, то «мешающий» сигнал ослабнет в 100 раз и т.д. Иногда этот многоэтажный параметр заменяют одной из составляющих — шириной полосы пропускания. Ширина пропускания в выше приведенном примере равна 20 кГц, или +/- 10 кГц относительно центральной частоты (которая у нас определяется номером канала). Дальше мы поясним это при помощи спектральной диаграммы. А вот «помехозащищенность» РРМ приемника, к сожалению, однозначно охарактеризовать не удается.
В УКВ диапазоне избирательность по соседнему каналу измеряется при двух значениях расстройки мешающего сигнала — 120 и 180 кГц. Это объясняется тем, что для системы радиовещания в диапазоне УКВ, ближайший соседний канал (мешающий) отстоит от частоты полезного сигнала на 120 кГц, когда оба сигнала имеют одну и ту же синфазную модуляцию, а ближайший соседний канал, имеющий другую модуляцию, отстоит от частоты полезного сигнала на 180 кГц.
Избирательность по соседнему каналу определяется в основном трактом промежуточной частоты и в пределах диапазона изменяется незначительно.
Избирательность по зеркальному каналу определяет ослабление радиоприемником мешающего сигнала, отстоящего от принимаемого на удвоенное значение промежуточной частоты. Селективные (избирательные) свойства радиоприемника по зеркальному каналу определяются резонансными свойствами избирательных цепей до преобразователя частоты (входных цепей, УВЧ).
Избирательность по промежуточной частоте определяет ослабление приемником мешающего сигнала, частота которого равна промежуточной частоте приемника. Работа радиостанций на этих частотах запрещена. Однако в ряде случаев гармоники радиостанций могут совпадать с промежуточной частотой приемника. При этом они могут быть сильными помехами при приеме других радиостанций.
Ослабление помехи с частотой, равной промежуточной, осуществляется резонансными контурами входных цепей и усилителя высокой частоты. Для большего ослабления этой помехи на входе приемника включают специальный фильтр, который настраивают на промежуточную частоту и тем самым ослабляют проникновение помехи во входные контуры приемника.
Одним из важнейших показателей качества тракта приема является чувствительность приемника. Чувствительность приемника характеризует способность приемника принимать слабые сигналы. Чувствительность приемника определяется как минимальный уровень входного сигнала устройства, необходимый для обеспечения требуемого качества полученной информации. Если чувствительность приемника ограничивается внутренними шумами, то ее можно оценить реальной или предельной чувствительностью приемника, коэффициентом шума или шумовой температурой.
Чувствительность приемника с небольшим усилением, на выходе которого шумы практически отсутствуют, определяется э.д.с, (или номинальной мощностью) сигнала в антенне (или ее эквиваленте), при которой обеспечивается заданное напряжение (мощность) сигнала на выходе приемника.
Чувствительность приемника определяется коэффициентом его усиления К УС. Приемник должен обеспечивать усиление даже самых слабых входных сигналов до выходного уровня, необходимого для нормального функционирования устройства, однако, на входе приемника действуют помехи и шумы, которые также усиливаются в приемнике и могут ухудшать качество его функционирования. Кроме того, на выходе приемника появляются его усиленные внутренние шумы. Чем меньше внутренние шумы, тем лучше качество приемника, тем выше чувствительность приемника.
Реальная чувствительностьприемника равна э.д.с. (или номинальной мощности) сигнала в антенне, при которой напряжение (мощность) сигнала на выходе приемника превышает напряжение (мощность) помех в заданное число раз. Предельная чувствительность приемника равна э.д.с. или номинальной мощности Р АП сигнала в антенне, при которой на выходе его линейной части (т. е. на входе детектора), мощность сигнала равна мощности внутреннего шума.
Предельную чувствительность приемника можно также характеризовать коэффициентом шума N 0 , равным отношению мощности шумов, создаваемых на выходе линейной части приемника эквивалентом антенны (при комнатной температуре T 0 = 300 К) и линейной частью, к мощности шумов, создаваемых только эквивалентом антенны. Очевидно,
где k = 1,38∙10 –23 Дж/град — постоянная Больцмана;
П ш — шумовая полоса линейной части приемника, Гц;
Р АП — мощность сигнала, Вт.
Из (3.19) видно, что мощность сигнала, соответствующую его предельной чувствительности и отнесенную к единице полосы частот, можно выразить в единицах kT 0:
, (3.19)
Предельную чувствительность приемника можно также характеризовать шумовой температурой приемника Т пр, на которую надо дополнительно нагреть эквивалент антенны, чтобы на выходе линейной части приемника мощность создаваемых им шумов равнялась мощности шумов линейной части. Очевидно,
откуда (3.21)
На реальную антенну воздействуют внешние шумы, номинальная мощность которых
где Т A — шумовая температура антенны. Таким образом реальная чувствительность приемника:
Предельная чувствительность при
Рисунок 3.13 – График зависимости относительной шумовой температуры антенны от частоты
По рисунку 3.13 видим, что на высокой частоте коэффициент относительной шумовой температуры антенны уменьшается и остается неизменной, а также ее роль влияния на чувствительность приемника уменьшается.2/(4*k*T*Rг)). Где выходной шум (onoise), пересчитанный на вход (inoise = onoise/K(f), где K(f) — коэффициент передачи четырехполюсника) дальше это делится на спектральную плотность мощности входного шума, которую можно рассчитать исходя из выходного сопротивления генератора Rг.
В мультисиме для этого необходимо использовать постобработку результатов моделирования шумов. В постпроцессоре добавляется обработка результатов моделирования шумов по формуле (db((inoise_spectrum)/4/1.38e-23/300/50)/2)
НЧ область очень похожа на фликкер- шум транзистора.
Чтобы получить график с коэффициентом шума, необходимо сначала запустить: Моделирование – Вид анализа – Шумов.
Моделирование – Постпроцессор – Вкладка (Графопостроитель) – Кнопка (Расчитать).
Результат моделирования приведен в виде рисунка 3.13.
Рисунок 3.14 – Результат расчета внутреннего шума приемника
С помощью пакета MultiSim оценим коэффициент шума входного каскада РПрУ, предусмотренного ТЗ на курсовой проект. Оценим чувствительность устройства.
Решение: дадим определение чувствительности, это – способность радиоприёмника принимать слабые по интенсивности радиосигналы и количественный критерий этой способности.
Формула для оценки чувствительности,
где — постоянная Больцмана, — абсолютная температура (К), -шумовая полоса частот приемника, дБ — коэффициент шума РПрУ, дБ, — относительная шумовая температура антенны на частоте сигнала.
Определим относительную шумовую температуру антенны на частоте f=17,6375 MГц по формуле:
(3.23)
где значения в МГц.
Подставив числовые значения получим:
Теперь можем определить и чувствительность приемника:
Сделаем вывод, коэффициент шума приемника по результатам расчета оказалась больше, чем значения внешних шумов. Это так, потому что коэффициент шума приемника зависит от частоты. Чувствительность в большей мере, зависит от внутреннего шума приемника.
Система АРУ
В зависимости от назначения и степени универсальности радиоприемник имеет различные органы управления: для настройки на частоту нужного радиосигнала, для согласования уровня выходного сигнала и других параметров с требованиями потребителя принимаемой информации. Управление может быть ручным или автоматическим. Автоматическое управление выполняется по командам, введенным в программное управляющее устройство; функции человека при этом исключаются либо сводятся к включению управляющего устройства, например к нажатию клавиши и т.п.
Автоматические регулировки необходимы для обеспечения приема при быстро изменяющихся условиях, когда оператор не может действовать с достаточной быстротой и точностью, пользуясь ручными регуляторами. Кроме того, автоматизация позволяет упростить функции оператора либо вовсе исключить необходимость обслуживания приемной аппаратуры.
Функции регулировок усложняются, когда требуется обеспечить прием сложных сигналов при меняющихся условиях распространения и в сложной шумовой обстановке. Адаптация приемника к таким ситуациям для наиболее точного воспроизведения передаваемой информации представляет трудную задачу; оператор решает ее путем последовательных проб, которые требуют затраты времени и связаны с потерей части информации. Электронные автоматические регуляторы, основанные на применении быстродействующих микропроцессоров, решают эту задачу.
Основная тенденция развития всех видов техники, в том числе радиосвязи и радиовещания, – создание телеуправляемых и полностью автоматизированных систем. В этом случае все регулировки, необходимые для поддержания соответствия оборудования техническим требованиям, должны выполняться автоматически.
К наиболее распространенным автоматическим регулировкам приемников относят автоматическую регулировку усиления (АРУ) и автоматическую подстройку частоты (АПЧ).
Автоматическая регулировка усиления обеспечивает поддержание на выходе усилителя промежуточной частоты уровня сигнала, достаточно высокого и стабильного для воспроизведения сообщений от радиостанций различной мощности, находящихся на разных расстояниях и в меняющихся условиях распространения радиоволн. Благодаря простоте АРУ применяется почти во всех радиоприемниках.
Цепи АРУ могут включать следующие элементы приемника:
– усилители радио- и промежуточной частоты, приспособленные для
регулировки усиления изменением регулирующего напряжения;
– детекторы для получения регулирующих напряжений путем выпрямления сигнала;
– дополнительные усилители для увеличения регулирующего напряжения при необходимости повысить эффективность АРУ;
– цепи, обеспечивающие пороговое напряжение для получения регулировки с задержкой;
– фильтры нижних частот для подавления продуктов модуляции сигнала в цепях регулирующих напряжений.
Типичные упрощенные схемы АРУ представлены на рисунке — 3.15. В варианте на рисунке — 3.15, а регулирующее напряжение формируется в результате выпрямления напряжения усиленного сигнала с выхода усилителя. Напряжение от детектора Д подается через дополнительный усилитель У и фильтр нижних частот Ф в направлении, обратном направлению прохождения сигнала в регулируемом усилителе. Со стороны выхода оно действует на предшествующие усилительные каскады, поэтому такая регулировка называется обратной АРУ. Усилитель У может быть включен и до детектора Д. Если напряжение на выходе регулируемого усилителя достаточно велико, то этот усилитель не применяют.
В цепи обратной АРУ усиление регулируется благодаря изменению регулирующего напряжения U рег, которое, в свою очередь, изменяется в результате изменения напряжения сигнала на выходе регулируемого усилителя. Следовательно, в цепи обратной АРУ неизбежно и необходимо некоторое изменение выходного напряжения. При правильном выборе параметров цепи это изменение не выходит за допустимые пределы.
В схеме на рисунке — 3.15,б регулирующее напряжение вырабатывается в результате усиления и выпрямления входного напряжения и действует в том же «прямом» направлении, в котором проходит принимаемый сигнал в регулируемом усилителе. Соответственно такая цепь называется прямой АРУ. В отличии от обратной АРУ, здесь регулирующее напряжение не зависит от напряжения на выходе усилителя, т.е. имеется теоретическая возможность полного постоянства выходного напряжения. На практике реализовать эту возможность не удается. Как было выяснено, условие постоянства выходного напряжения состоит в строго определенном законе изменения коэффициента усиления при изменении напряжения на входе. В реальных условиях коэффициент усиления регулируют цепями, свойства которых зависят от регулирующего напряжения. Эту зависимость обеспечивают нелинейные элементы, но их характеристики определяются спецификой происходящих в них сложных физических процессов и управлять формой этих характеристик можно лишь в очень слабой степени.
Рисунок3.15 — Структурная схема построения «обратной» АРУ и амплитудные характеристики усилителя без АРУ, с простой АРУ и с АРУ с задержкой
Для расчета действия АРУ и РРУ воспользуемся пакетом MultiSim.
Рисунок3.16 – Схема РРУ
Рисунок3.17 – Схема АРУ
Результаты моделирования приведем в виде рисунков 3.18, 3.19 и 3.20
Рисунок3.18 – Осциллограмма автоматической регулировки усиления
Из осциллограммы выпишем уровни сигнала: на входе АРУ
U вх = 988,077∙10 -6 В, на выходе АРУ U вых = 1,180В.
По ним определим действие автоматической регулировки усиления при изменении уровня сигнала на выходе:
Получивщиеся значение соответствует ГОСТ 5651-89: действие АРУ при изменении уровня сигнала на выходе не более 10 дБ.
Рисунок3.19 — Осциллограмма автоматической регулировки усиления
Из осциллограммы выпишем уровни изменений входного сигнала: U вх 1 = 988,077∙10 -6 В, U вх 2 = 9,999∙10 -3 В.
По ним определим действие автоматической регулировки усиления при изменении уровня сигнала на входе:
Получивщиеся значение соответствует ГОСТ 5651-89: действие АРУ при изменении уровня сигнала на выходе 46 дБ.
Рисунок3.20 – Осциллограмма ручной регулировки усиления
Из осциллограммы выпишем уровни сигнала: на входе
U вх = 993,961∙10 -6 В, на выходе U вых = 4,429∙10 -3 В.
По ним рассчитаем глубину ручной регулировки усиления в децибелах:
Получивщиеся значение соответствует глубине РРУ по техническому заданию.
Блок АЦП
Усилитель второй промежуточной частоты, который подавляет частоты соседнего канала, а также последующие блоки приемника обработки сигнала построены на цифровых устройствах.
Достоинств такойкомбинированной обработки сигнала множество. К таким достоинствам относится селекция полезного сигнала. В виду того что соседний канал расположен очень близко к основному каналу, избирательность должна быть точной. При построении аналоговых радиоприемных устройств добиться необходимого результата крайне важно, а в некоторых случаях даже невозможно.
Применение цифровых устройств решает такую проблему с легкостью.
Преобразование непрерывного сигнала в цифровую форму, возможно только с использованием аналого- цифровой преобразователя (АЦП).
Требования к данным устройствам также велики как и к остальным устройствам. К разрядности АЦП тоже приводят огромное требование. Чем выше разрядность АЦП, тем выше качество приема, но для обработки сигнала необходим мощный процессор, что в свою очередь приводит к увеличению энергопотребления. Поэтому, для достижения нужного результата используют некий компромисс между разрядностью АЦП и процессором.
Но для функционирования АЦП необходимо определенное значение напряжения, которое является пороговым. Данное значение напряжения описывается требованием АЦП как младший значащий разряд (МЗР) (Least significant bit (LSB)) который у каждого АЦП свой.
Как правило в современных радиоприемных устройствах применяют 8-14(а то и больше) разрядные АЦП. При конструировании инфрадинного приемника с высоким классом точности с технологией программно-определяемого радиоприема, обычно применяют высокоразрядные АЦП. Одним из популярных аналого-цифровых преобразователей является AD9644 производителем которого является фирма «Analog Devices». Разрядность у данного АЦП равна 14, а значение МЗР 1,8 В.
Процесс преобразования сигнала осуществляется в два этапа. Первый этап – дискретизация по времени непрерывного сигнала u(t) . В итоге получим последовательность импульсов- отсчетов, следующих с шагом Δt.
Второй – этап оцифровка каждого отсчета. Диапазон возможных значений напряжений (u min , u max )делится на M интервалов длиной
Δu= (u max — u min )/ M (2.24)
каждый. Величина Δu называется шагом квантования по уровню. Далее интервалы нумеруют M- ичными цифрами снизу вверх, начиная с цифры 0.
Определим частоту дискретизации по теореме Котельникова:
F k = 2∙ F в , (2.25)
F k = 2∙17,725∙10 6 = 35,45∙10 6 отсчетов/с .
Теперь найдем шаг квантования по уровню, используя значения U max =4,249∙10 -3 В, U min = -4,249∙10 -3 В.
u max — u min = (4,249∙10 -3 + 4,249∙10 -3 В)= 8,5∙10 -3 В,
Значение M выбираем равным 16384, так как 2 14 = 16384:
Δu=8,5∙10 -3 / 16384= 5,19∙10 -7 .
По технической спецификации к данному аналого-цифровому преобразователю, определим значение младшего значащего разряда. МЗР для данного АЦП равен 1,8 В. То есть, для нормального функционирования как АЦП, так и всей системы в целом, необходимо усилить напряжение на входе антенны как минимум до уровня МЗР.
Бюджет усиления АЦП – минимальное разрешающее напряжение на входе АЦП, которое усилено в преселекторе и УПЧ. Значение напряжения на входе преселектора равно 1 мВ. Вычислим бюджет усиления АЦП:
K=1,8 /1∙10 -3 =1330 раз=31,55 дБ.
Заключение
В данной работе был выполнен расчет, который позволил выбрать и обосновать спроектированную структурную схему радиоприемного устройства по исходным данным технического задания. Произведен расчет электрической принципиальной схемы УПЧ приемного устройства и самого приемника.
Данный супергетеродинное приемное устройство амплитудно-модулированных сигналов в результатах моделирования отвечает требованиям, заданных в техническом заданий курсового проекта.
Список литературы
1. Проектирование радиоприемных устройств. Под редакцией А. П. Сиверса. Учебное пособие для вузов. – М., Сов. Радио, 1976 – 488 с.
2. Бакеев Д.А., Дуров А.А., Ильюшко С.Г., Марков В.А., Парфёнкин А.И. Прием и обработка информации. Курсовое проектирование устройств приема и обработки информации: Учебное пособие. – Петропавловск-Камчатский: КамчатГТУ, 2007. – 151 с.
3. Румянцев К.Е. Прием и обработка сигналов: Учеб.пособие для студ. высш. учеб.заведений/ — М.: Издательский центр «Академия», 2004. – 528с.
4. Подлесный С. А. – электронное учебное пособие/ Устройства приема и обработки сигналов – Красноярск: ИПК СФУ, 2008
5. ГОСТ 5651-89 Аппаратура радиоприёмная бытовая
Любое электронное устройство, а тем более такое сложное, как стереорадиоприемник, чтобы производитель имел законное право его продавать, должно удовлетворять длинному перечню специальных требований. Однако для покупателя обычно доступна только часть параметров, приводимая в перечне технических характеристик. Среди них всегда и в первую очередь — чувствительность, затем избирательность, отношение сигнал/шум, коэффициент нелинейных искажений и ряд других. По этим причинам покупающему многоканальный AV-ресивер, классический тюнер или автомагнитолу, дабы не сожалеть впоследствии о качестве приема, требуется подойти к оценке своего будущего приобретения во всеоружии.
Чувствительность
Зависимости выходного сигнала, шумов и стереоразделения от уровня входного сигнала
Чувствительность характеризует способность радиоприемника принимать слабый радиосигнал. Это минимальный входной сигнал, при котором обеспечивается выходной сигнал требуемого уровня при оговоренных условиях, обычно это отношение сигнал/шум. При взгляде на таблицу параметров в инструкции бросается в глаза то, что наиболее подробно изготовители приводят данные о чувствительности: может приводиться до пяти ее значений с комментариями, определяющими условия измерения. Тут и максимальная чувствительность, и чувствительность в режиме прима «стерео» и «моно». Какая из них самая главная? На что обращать внимание в первую очередь? Достижение какого ее значения может служить залогом высокого качества приема? А может, это все от лукавого?
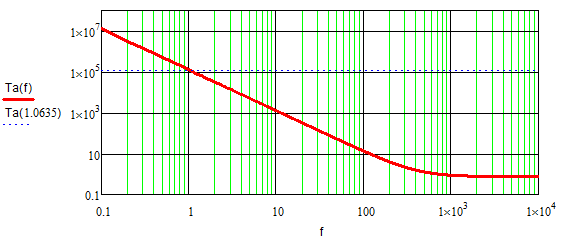
Обычно обязательно присутствует значение чувствительности, которую по аналогии с ГОСТом можно назвать максимальной, обозначаемую как usable sensitivity (некоторые фирмы в русскоязычных вариантах инструкций называют ее реальной чувствительностью) и с указанием, что значение получено при измерении в соответствии со стандартом IHF. Этот американский стандарт оговаривает параметры и условия измерения приемников FM-сигнала и именно в соответствии с его требованиями приводятся значения чувствительности, выраженные в dBf. Мы уже писали, что dBf, или в русском написании дБф, относительная величина, определяющая чувствительноть в децибелах относительно напряжения, соответствующего фемтоватту на нагрузке 75 Ом. Собственно сам фемтоватт — мощность ничтожная, в 10 -15 меньше ватта, т.е. 1, деленная на 1000000000000000 (миллион миллиардов). Для наглядности пояснений мы приводим номограмму, которая позволяет легко сравнить значения чувствительности в мкВ и дБф.
Чтобы понять, почему отличаются значения чувствительности, обратимся ко второму рисунку, где показаны зависимость выходного сигнала, шумов и сререоразделения от уровня входного сигнала. Конечно, это графики реального приемника и аналогичные графики для других моделей могут отличаться числовыми значениями, но характер зависимостей сохраняется всегда.
Некоторые изготовители просто точно указывают условия измерений (например, при уровне искажений 3% и отношении сигнал/шум 26 дБ), что чаще всего соответствует требованиям этого американского стандарта. Эта чувствительность характеризует способность приемника принять слабый сигнал, который ни в коей мере нельзя рассматривать как музыкальный источник, а только для приема речевых сообщений. Тем более, и это практически никогда не уточняется в технических характеристиках, что это чувствительность при приеме моносигнала. На нашем графике этой чувствительности соответствует значение А. Реально послушать музыку можно только при значительно большем отношении сигнал/шум, и такую чувствительность также приводят (хотя и не все производители, предлагаем вдумчивому читателю решить почему), указывая отдельно ее значения для приема моно- и стереосигнала. Называют ее в англоязычных инструкциях quieting sensitivity или просто sensitivity. Иногда измерения производят при отношении сигнал/шум 46 дБ, иногда — 50 дБ. На графике ее значения для отношения сигнал/шум 50 дБ отмечены для моно- (В) и стереосигнала (С). Обратите внимание на то, что при достижении требуемого отношения сигнал/шум (50 дБ) в случае С еще практически отсутствует стереоразделение. Реально приемное устройство с подобными характеристиками начнет хорошо принимать стереосигнал при уровне на входе более 45 дБф. Качественный прием стереосигнала и представляет всегда наибольший интерес. В лучших моделях тюнеров чувствительность (стерео, отношение сигнал/шум 50 дБ) не бывает больше чем 17 мкВ (36,1 дБф), а в массовых моделях для высококачественного приемника такая чувствительность не должна превышать 28–30 мкВ. Некоторые изготовители, ориентированные на рынок немецкоязычных стран Европы, приводят чувствительность, измеренную по германскому стандарту (DIN), и в силу некоторых отличий условий измерений ее значения в этом случае получаются на 10–15 мкВ больше.
Как уже стало понятно из обсуждения чувствительности, отношение сигнал/шум на выходе радиоприемного устройства зависит от уровня принимаемого сигнала. При малых уровнях шум вообще может подавить сигнал, т.е. стать больше его. Это одна из особенностей приема сигнала с частотной модуляцией. Поэтому в описаниях приводится отношение сигнал/шум (signal to noise ratio) для достаточно сильного сигнала (обычно порядка 65 дБф), когда оно уже достигает своего максимального значения. Для моносигнала оно составляет порядка 70 дБ, для стерео — обычно на 5 дБ меньше. В лучших моделях может достигаться значение этого отношения на 3–5 дБ выше.
ИзбирательностьПри радиоприеме необходимо выделить только требуемый сигнал, а все мешающие подавить. Такими вредными могут быть сигналы соседних радиостанций. Ответственным за прием требуемого сигнала и подавление посторонних в приемнике является усилитель промежуточной частоты (ПЧ), и в современных моделях конкретно за подобную селекцию отвечает керамический фильтр ПЧ. Ни один такой фильтр не является идеальным, то есть таким, который абсолютно без искажения передает все сигналы в полосе пропускания и полностью подавляет помеху за ее пределами. Всегда существует некая область частот на границе (когда больше, когда меньше), в которой уже ослабляются составляющие спектра принимаемого сигнала, но еще недостаточно подавляется помеха. Теоретически спектр ЧМ-сигнала очень широк и общепринятое значение полосы пропускания фильтр ПЧ около 400 кГц является компромиссом между качеством принимаемого сигнала (см. ниже о нелинейных искажениях) и количеством радиостанций, которые могут уместиться в отведенном для радиовещания участке диапазона, не мешая друг другу. Избирательность, значение которой приводится в описании, показывает, насколько ослабляется нежелательный сигнал по отношению к принимаемому. Хорошим считается значение более 50 дБ при частоте мешающего сигнала на 300 кГц меньше и больше частоты полезного сигнала. Иногда, для пущего эффекта, изготовители приводят значение избирательности при расстройке на 400 кГц, и тогда значение получается децибелов на 10 больше.
Нелинейные искаженияУровень нелинейных искажений в приемнике сигналов с частотной модуляцией зависит не только от схемы выходных низкочастотных каскадов, но и в немалой степени от ширины полосы пропускания по промежуточной частоте. В серьезных приемниках она может быть переменной (чаще всего переключаться) для обеспечения компромисса в случае приема слабого сигнала, между искажениями и приемлемым уровнем шумов. Считается, что для достижения низкого уровня искажений линейный участок характеристики частотного детектора, который осуществляет преобразование ЧМ-сигнала в звуковой, должен быть не менее 1 МГц. Если теперь сравнить это с полосой по ПЧ, то станет понятно, почему уровень КНИ для вполне пристойных по остальным параметрам устройств может достигать 0,8% (в режиме приема стерео). В лучших приемниках значение КНИ не превышает 0,1% для моносигнала и 0,15 для стерео.
Разделение каналовНа страницах журнала мы уже рассказывали о некоторых параметрах, определяющих качество приема стереопередач, но наиболее существенным для правильного воспроизведения стереопанорамы является достижение необходимого разделения каналов. На нашем графике видно, что разделение, как и другие параметры зависит от уровня принимаемого сигнала. Кроме того, оно зависит также и от симметрии частотного тракта ПЧ. Значение в 40 дБ является практически предельным и по представлениям 50-х годов, когда и разрабатывались системы стереовещания, вполне достаточным. Заметим, что даже измерительные стереомодуляторы не обеспечивают большего разделения. Иногда для обеспечения работы стереодекодера при низком отношении сигнал/шум используются специальные схемы как автоматические, так и включаемые вручную, искусственного уменьшения разделения на высоких частотах. Обозначаются такие устройства HIGH BLEND. Это позволяет снизит шумы до приемлемого уровня и относительно немного потерять в стереопанораме.
Другие параметрыЧасто в техническом описании приводят значение неравномерности частотной характеристики выходного сигнала в полосе 30 Гц – 15 кГц и подавление по ПЧ. Для современных приемников хорошей можно считать неравномерность ±1 дБ, хотя встречаются модели и с завалом до 3 дБ на краях диапазона. Подавление по промежуточной частоте интересно тем, что возможная помеха на такой частоте наиболее сильно влияет на качество приема. Один пример. Лет двадцать тому назад, еще в Советском Союзе появился в продаже приемник одной известной японской фирмы, выполненный по схеме с двумя промежуточными частотами. Такая схема обеспечивает лучшую избирательность по альтернативным каналам приема. Однако в связи с тем, что первая (высокая) промежуточная частота точно соответствовала частоте, на которой вещала в диапазоне УКВ в Москве радиостанция «Маяк», то он только ее здесь и принимал…
Радиоприемная часть в современной аппаратуре с виду проста до предела: высокочастотный блок да пара микросхем
Все сказанное относится к приему в диапазоне FM (или УКВ). Для диапазонов АМ (средних и длинных волн), вещание в которых можно рассматривать только как информационное, обычно приводятся не больше двух-трех параметров: чувствительность, избирательность и отношение сигнал/шум. Если чувствительность измеряется на зажимах антенного входа, то приводится ее значение в мкВ. Однако чаще, поскольку практически все современные стационарные приемники и тюнеры комплектуются рамочной антенной, указываются значения в мкВ/м (микровольт на метр) именно для нее. Типичным значением является 300 – 400 мкВ/м, а для электрического входа антенны 30–40 мкВ. Избирательность по соседнему каналу (при АМ-вещании это расстройка всего на 9 кГц) редко превышает 30 дБ, а массовые приемники имеют значения на 3-5 дБ меньше. В то же время отношение сигнал/шум достигает вполне приемлемого значения в 50 дБ при уровне сигнала всего 100 мкВ/м.
К сожалению, приходится констатировать, что аналоговые приемники все больше отходят на второй план, а потому и существенно упрощаются. Обычно это отдельная плата в составе ресивера (см. фото), которая содержит радиочастотный входной блок и пару-тройку универсальных микросхем (см. фото). Конечно, и такой набор обеспечивает всю обработку (усиление, детектирование и декодирование) аналогового сигнала, но качество, как мы видим страдает. Наши наблюдения показывают, что с каждым новым поколением AV-ресиверов, производители все меньше и меньше выделяют средств на их приемную часть. Часто новые ресиверы имеют и параметры чуть-чуть похуже и поменьше функций. С другой стороны устройства для приема цифрового радио пока выпускаются в виде отдельных блоков, а для их цифровых выходов в последних моделях многих AV-ресиверов уже предусмотрен дополнительный вход (оптический или коаксиальный) обозначенный как DAB.
Шумы и предельная чувствительность датчиков низкочастотного электромагнитного поля в морской воде
На правах рукописи
МАКСИМЕНКО ВАЛЕРИЙ ГРИГОРЬЕВИЧ
ШУМЫ И ПРЕДЕЛЬНАЯ ЧУВСТВИТЕЛЬНОСТЬ ДАТЧИКОВ НИЗКОЧАСТОТНОГО ЭЛЕКТРОМАГНИТНОГО ПОЛЯ В МОРСКОЙ ВОДЕ
Специальность 01.04.03 Радиофизика
Автореферат
диссертации на соискание ученой степени кандидата технических наук
Москва 2008 г.
003458903
Работа выполнена в Учреждении Российской академии наук Институте радиотехники и электроники им. В. А. Котельникова РАН (Фрязинский филиал).
Научный руководитель: доктор технических наук,
профессор Яковлев Олег Изосимович
Официальные оппоненты: доктор технических наук,
профессор Салихджанова Рашида Мухамет-Фатиховна
доктор физико-математических наук, профессор Мериакри Вячеслав Вячеславович
Ведущая организация: Федеральное государственное унитарное
предприятие ЦНИИ «Электроприбор»
Защита состоится 18 февраля 2009 г. в 15 часов на заседании диссертационного совета Д212.131.01 при Московском государственном институте радиотехники, электроники и автоматики (техническом университете) по адресу:
119454, г. Москва, проспект Вернадского, 78.
С диссертацией можно ознакомиться в библиотеке Московского государственного института радиотехники, электроники и автоматики (технического университета).
Автореферат разослан декабря 2008 г.
Ученый секретарь
диссертационного совета Д212.131.01 доктор технических наук, профессор Куликов Г.В.
Общая характеристика работы
Актуальность темы и состояние вопроса.
Работа посвящена исследованию закономерностей и физических явлений, обусловливающих собственные шумы датчиков низкочастотного электромагнитного поля в морской воде, и путей уменьшения шумов с целью достижения максимальной чувствительности при приеме электромагнитных полей в диапазоне частот 3…300 Гц.
При решении ряда научных и практических задач необходимо принимать и измерять низкочастотные электромагнитные поля в морской воде. Способность низкочастотного электромагнитного поля проникать в морскую воду на большую глубину используют для осуществления радиосвязи с подводными объектами на частотах ниже 100 Гц. Для приема электромагнитного поля в море применяют датчики, осуществляющие преобразование компоненты Е или Н электромагнитного поля в пропорциональный им электрический сигнал. Эти датчики, как правило, буксируются за движущимся объектом на кабель-тросе. Электродные датчики имеют два контактных электрода, которые снимают разность потенциалов, созданную в воде токами проводимости. Для защиты электродов от воздействия потока жидкости электродный датчик может иметь диэлектрические обтекатели с отверстиями. Также применяют безэлектродные датчики. Это трансформаторный датчик, представляющий собой катушку на кольцевом сердечнике, а также магнитоиндукционный датчик, выполненный в виде цилиндрической катушки с сердечником. Наибольшее применение нашел кабельный электродный датчик, длина активной части которого достигает нескольких сотен метров. На глубинах менее 100 метров в диапазоне частот 3…300 Гц возможность приема сигнала на такой датчик определяется величиной атмосферных помех. Практические задачи требуют увеличения глубины до нескольких сотен метров и уменьшения габаритов датчика, так как большая его длина создает проблемы при эксплуатации. В этом случае чувствительность приемника ограничивается собственным шумом датчика. Для приема сигнала на таких глубинах требуется увеличение мощности передатчика или уменьшение собственных шумов датчика поля. Повышение мощности передатчика практически невозможно, она и так достигает единиц мегаватт. Следовательно, необходимо уменьшать шум датчика. Увеличение чувствительности датчика может быть также достигнуто увеличением его коэффициента преобразования. Коэффициент преобразования в рассматриваемой задаче есть отношение выходного напряжения датчика к величине напряженности электрической или магнитной компонент электромагнитного поля. Предельной чувствительностью датчика будем называть минимальный уровень напряженности поля сигнала, при котором его мощность на входе приемника равна мощности теплового шума в полосе 1 Гц. При этом имеется в виду, что приняты меры, которые позволяют устранить другие составляющие шума. Большой опыт по измерению слабых электрических полей в море на частотах до десятых долей герца накоплен в Институте земного магнетизма и распространения радиоволн РАН. Разработкой трансформаторных дат-
чиков с металлическими «концентраторами тока проводимости» для приема низкочастотных электромагнитных полей в море занимались в Московском энергетическом институте и Центральном научно-исследовательском институте им. А.Н. Крылова в Санкт-Петербурге. Исследования в области конструирования и согласования магаитоиндукционных _ датчиков были проведены в Физико-механическом институте АН УССР. Зарубежные публикации о приеме электромагнитного поля в море связаны, в основном, с работами по осуществлению радиосвязи с подводными лодками. Однако многие вопросы, связанные с повышением чувствительности датчиков электромагнитного поля в море к моменту наших исследований не были решены, что не позволяло добиться увеличения чувствительности датчиков до предельно возможного значения. Поэтому исследование возможностей уменьшения собственного шума и повышения чувствительности датчиков является актуальным.
Цели работы.
Целью диссертационной работы является исследование причин возникновения шумов в датчиках электромагнитного поля в морской воде и поиск путей их уменьшения до минимально возможного значения. Для ее достижения необходимо было провести следующие исследования:
экспериментальное исследование спектральных зависимостей электродного шума в покоящейся и движущейся жидкости;
исследование природы электродного шума движения, разработка методов его уменьшения;
исследование применимости различных металлов для изготовления электродов датчиков с точки зрения обеспечения минимума собственного шума и стабильности импеданса;
определение условий и способов согласования электродных датчиков с входными каскадами приемного устройства;
создание новых электродных и безэлектродных высокочувствительных по-мехозащищенных датчиков, а также оптимизация конструктивных параметров известных датчиков для обеспечения их наивысшей чувствительности.
Научная новизна работы.
1. Экспериментально исследованы спектральные зависимости напряжения шума электродов разной площади из разных металлов в отсутствие движения жидкости, и проведено сравнение измеренного электродного шума с тепловым шумом. Проведены экспериментальные исследования электродного шума при обтекании электродов потоком жидкости. Получены зависимости напряжения шума от скорости движения жидкости, площади электродов, солености электролита, конструкции обтекателя. Предложен способ определения скорости жидкости по величине электродного шума, признанный изобретением.
2. Предложен механизм возникновения специфического электродного шума движения, позволяющий непротиворечиво интерпретировать результаты экспериментального исследования шума движущегося электрода.
3. Экспериментально исследовано поведение составляющих (емкости и сопротивления) импеданса датчиков с электродами из разных металлов при дли-
тельной выдержке в морской воде. Результаты исследования показали, что по стабильности импеданса, величине предельной чувствительности, минимальному шуму в состоянии покоя и в движении наиболее пригодными для изготовления электродов являются тантал, титан, нержавеющая сталь.
4. Определен коэффициент трансформации при резонансном и нерезонанс-лом трансформаторном согласовании электродного датчика с приемным устройством, обеспечивающий максимальную чувствительность.
5. Проведена оптимизация конструктивных параметров магиитоиндукцион-ного датчика на максимум чувствительности и трансформаторного датчика на максимум коэффициента преобразования.
6. Определена предельная чувствительность для различных типов датчиков электромагнитного поля в морской воде.
7. Разработаны признанные изобретениями датчики, имеющие при движении повышенную чувствительность по сравнению с известными.
Достоверность результатов.
Достоверность результатов и выводов диссертационной работы подтверждается физической непротиворечивостью основных результатов, согласованностью результатов лабораторных и натурных экспериментов с теоретическими предпосылками и результатами других авторов, повторяемостью результатов в разных опытах.
Практическая значимость работы.
Использование полученных результатов при конструировании датчиков позволяет достичь их наивысшей чувствительности. На практике это означает осуществление приема на больших глубинах и расстояниях от передатчика без увеличения его мощности, а также возможность приема сигнала при большей скорости корабля. Результаты исследования в натурных условиях электродных датчиков с обтекателями, позволяющие более чем на порядок снизить уровень шумов датчика при движении, признаны Научным советом АН СССР по проблеме «Статистическая радиофизика» важными и включены в «Отчет о важных и важнейших результатах научных исследований в области статистической радиофизики за 1989 год», представленный Научным советом в Отделение общей физики и астрономии АН СССР.
На защиту выносятся следующие положения:
# 1. На частотах ниже нескольких десятков герц электродный датчик в отсутствие движения имеет избыточный электрохимический шум, который даже у электродов из некорродирующих металлов может значительно превышать тепловой. На более высоких частотах избыточный шум у длительно выдержанных в электролите электродов из таких металлов, как правило, меньше теплового. Спектр избыточного шума имеет вид /~а, где а ~ 1 …1,5 .
2. При движении электродного датчика возникает специфический электродный шум движения, превышение которого над тепловым шумом по напряжению достигает нескольких порядков. У некорродирующих электродов он обусловлен флуктуациями скорости жидкости у поверхности электродов, в частности, тур-
булентностью. Причиной его возникновения является деформация двойного электрического слоя на границе металл-электролит.
Применение обтекателей позволяет уменьшить шум движения на 15 — 20 дБ.
3. Наивысшую чувствительность имеют датчики с электродами из металлов, имеющих на поверхности плотную диэлектрическую пленку окисла, таких, как тантал, титан, нержавеющая сталь. —————- ————-
4. Разработанные нами методики оптимизации трансформаторного и магни-тоиндукционного датчиков обеспечивают для них достижение максимальной предельной чувствительности при приеме электромагнитного поля в морской воде. Предложенные новые конструкции датчиков в условиях буксировки и вибрации имеют более высокую чувствительность, чем известные
Апробация работы, публикации и внедрение результатов.
Основные результаты работы опубликованы в 15 статьях и 4 авторских свидетельствах на изобретение. Результаты работы были использованы при разработке промышленной аппаратуры в КБ «Связьморпроект» (Санкт-Петербург) и при выполнении научно-исследовательских работ в ИРЭ РАН.
Личный вклад автора.
Все результаты диссертационной работы автор получил единолично, а именно:
— спланировал и подготовил эксперименты по измерению электродного шума и составляющих электродного импеданса, провел эксперименты в лабораторных условиях, непосредственно участвовал в натурных экспериментах, а также обработал результаты экспериментов;
— предложил модель возникновения шума движения электродных датчиков и получил соотношение, определяющее напряжение поляризации электрода;
— оптимизировал по максимальному отношению сигнал-шум магнитоин-дукционный датчик и трансформаторный датчик по максимальному коэффициенту преобразования;
— исследовал методы согласования электродных датчиков с приемным устройством на предмет достижения максимального отношения сигнал-шум;
— предложил ряд отличительных существенных признаков помехозащищен-ных датчиков, признанных изобретениями;
— предложил метод электромагнитного экранирования индуктивных элементов входных цепей приемного устройства для устранения виброшумов.
Структура и объем работы.
Диссертация состоит из введения, 4 глав и заключения, содержит 190 страниц текста, включая 52 рисунка, 17 таблиц и список литературы из 83 библиографических наименований.
Содержание диссертационной работы
Работа состоит из четырех глав, введения и заключения. Во введении дано обоснование актуальности темы диссертации, сформулированы цели работы и положения, выносимые на защиту.
Глава 1 содержит обзор литературы по теме диссертации. Главы 2, 3 и 4 содержат оригинальные материалы, полученные диссертантом. В главе 2, написанной на основе наших работ [1-3], представлены результаты экспериментального исследования электродного шума в отсутствие движения электродов и составляющих импеданса электродов из разных материалов в морской воде, исследованы способы и условия согласования электродного датчика с приемным устройством, определена предельная чувствительность приемного устройства с электродным датчиком.
В разделе 2.1 приведены результаты лабораторных исследований шума электродов из различных материалов в отсутствие движения. Показано, что кроме теплового шума все электроды имеют избыточный электрохимический шум, который у корродирующих металлов (латунь, бронза) на частотах ниже 30 Гц в десятки раз по напряжению превышает тепловой. При этом у некорродирующих электродов из тантала отношение напряжения избыточного шума к тепловому на частотах в единицы герц находится в пределах 2…3 раз (рис.1). Для танталовых электродов на частотах выше 30 Гц можно считать, что электродный шум равен тепловому. Установлено, что электродный шум при отсутствии движения датчика имеет спектр вида /~а (от и 1..Л,5). Как избыточный, так и тепловой шум с ростом площади электродов 5 уменьшаются практически пропорционально , а их отношение изменяется незначительно.
Рис.1. Спектральные характеристики шумового напряжения танталовых электродов площадью 54 см2 в неподвижном электролите. 1 — избыточный шум; 2 — тепловой шум; 3 — отношение избыточный/тепловой.
В разделе 2.2 представлены результаты экспериментального исследования зависимости составляющих импеданса и С пары электродов, находящихся в
морской воде, от времени выдержки в электролите и частоты. Разработана методика измерений. Активное сопротивление определяет величину теплового шума электродного датчика и его предельную чувствительность. Емкость оказывает влияние на частотную характеристику входной цепи приемного устройства. Обе эти составляющие определяют условия оптимального согласования датчика с ———-приемным устройством, поэтому важна их стабильность во времени. По результатам исследования сделан вывод о том, что с точки зрения стабильности составляющих импеданса, а также достижения минимума тепловых шумов наиболее пригодными для изготовления электродов являются тантал, титан, нержавеющая сталь.
В разделе 2.3 экспериментально исследовано влияние загрязнения поверхности электродов нефтепродуктами на параметры импеданса датчика. Установлено, что попадание их на сухую поверхность электродов увеличивает сопротивление в 5 раз и уменьшает емкость в 3 раза, что приводит к увеличению теплового шума и рассогласованию электродного датчика с приемным устройством.
Рис. 2. Эквивалентная схема входной цепи приемного устройства.
В разделе 2.4 рассмотрено трансформаторное согласование электродного датчика с приемным устройством. Анализ эквивалентной схемы входной цепи приемника (рис.2), включающей шумовые источники его первого каскада, позволил определить максимальное значение предельной чувствительности £мин и коэффициент трансформации пот, при котором оно достигается, как при настройке входной цепи в резонанс на частоту принимаемого сигнала, так и при нерезонансном согласовании (частота сигнала выше резонансной частоты входной цепи). В частности, для нерезонансного согласования показано, что
где Л- активная составляющая импеданса датчика; Л,опт- оптимальное значение сопротивления источника сигнала для первого каскада приемника, при котором его коэффициент шума достигает минимального значения РуС1лт ; — коэффициент шума согласующего трансформатора; г = КС — постоянная времени
датчика; с/ — расстояние между электродами по направлению вектора Е, к — постоянная Больцмана, Т — абсолютная температура, а — угловая частота.
В разделе 2.5 рассмотрено бестрансформаторное согласование электродного датчика с приемным устройством при использовании в предварительном усилителе параллельно включенных транзисторов. Показано, что такое согласование требует нереально большого числа транзисторов, поэтому не рекомендовано к применению.
В разделе 2.6 определена предельная чувствительность приемного устройства с электродным датчиком для разных материалов электродов, разных способов согласования, разных шумовых параметрах согласующего трансформатора и предварительного усилителя. Рекомендовано нерезонансное трансформаторное согласование электродного датчика с приемным устройством как менее чувствительное к изменению импедансных характеристик датчика, чем резонансное.
В главе 3, написанной на основе публикаций автора [4-7, 14-16], исследованы шумы электродных датчиков, движущихся в морской воде. В разделе 3.1 изложены результаты лабораторных экспериментальных исследований шума электродных датчиков из разных материалов. Исследования проводились на лабораторной установке, которая содержит герметичную стеклянную ванну, на крышке которой устанавливались исследуемые электроды. Жидкость приводится в движение вращающимся активатором. Ванна с электродами размещена в многослойном стальном экране, который обеспечивает защиту от внешних магнитных и электрических полей. Фотоэлектрический датчик скорости вращения активатора позволяет вести контроль скорости движения жидкости. Импульсы с его выхода подаются на частотный детектор, при этом флуктуации выходного напряжения на выходе частотного детектора соответствуют флуктуациям скорости жидкости у поверхности электродов.
Установлено, что при движении уровень шума резко возрастает даже у не-корродирующих электродов из тантала и титана. В диапазоне 3…30 Гц измеренный шум у корродирующих электродов на несколько порядков, а у некорро-дирующих — в несколько раз превышает тепловой. У некорродирующих электродов выявлена связь шумового напряжения с флуктуациями скорости потока жидкости. На рис.3 показан спектр пульсаций скорости жидкости в относительном масштабе, рассчитанный по измеренному спектру флуктуаций выходного напряжения частотного детектора. Он выявил неравномерность вращения активатора. Спектр имеет пики на частотах 2,9 Гц и 5,1 Гц, а также на кратных им частотах. Спектр напряжения, снимаемого с электродов из тантала (рис.4), имеет такую же гребенчатую структуру, как и спектр пульсаций скорости, с пиками на тех же частотах. При этом в полосе 3…10 Гц напряжения, снимаемые одно-
и4 М
«■ ии ,
О (0 20
Рис. 4. Спектр напряжения на танталовых электродах.
одновременно с двух разных пар электродов, расположенных диаметрально противоположно, коррелированы с коэффициентом корреляции 0,9, а электродное напряжение имеет коэффициент корреляции более 0,7 с флуктуациями скорости потока жидкости. Тем самым доказано, что именно пульсация скорости жидкости определяет величину и спектр электродного напряжения. Таким образом, несовершенство установки позволило выявить важную связь между шумом движения и флуктуациями скорости жидкости, которая в дальнейшем была исследована более подробно. На рис.5 показаны спектры напряжения шума титановых электродов разной площади при скорости потока жидкости 0; 2,1 и 3,5 м/с. Спектры измерены в диапазоне частот 30…200 Гц, где пульсации скорости жидкости, вызванные неравномерностью вращения, не проявляются. На частотах ниже 100 Гц движение жидкости заметно увеличивает напряжение электродного шума. На частоте 30 Гц это увеличение достигает порядка. Увеличение
скорости потока приводит к росту электродного шума. Спектральная плотность шумового напряжения пропорциональна /~а, где а ~ 1,5. Проведено исследование, доказавшее связь электродного шума с турбулентностью потока. Перед парой электродов была установлена поворотная преграда, сечение которой имело вид вытянутого овала.
При движении жидкости со скоростью 1,7 м/с напряжение шума возрастало в 1,8 раза в случае поперечного положения большой оси овала по отношению к вектору скорости по сравнению с продольным ее положением. Увеличение скорости потока в экспериментах приводит к росту электродного шума, который объясняется увеличением флуктуационной составляющей скорости потока в результате увеличения энергии турбулентных вихрей. сц
Рис. 5. Спектры электродного шума при движении жидкости.
и/и,
АБ
m
¿о
■2 ■ 1
•3
60
ko
toi………………
о го (о so 80 m по мо m до ¿д
Рис. 6. Спектры выходного напряжения датчика. 1 — шум датчика без обтекателей при V=3 м/с, 2 — шум датчика с обтекателями №1 (200 отверстий) при V=3,5 м/с, 3 — шум датчика с обтекателями №2 (20 отверстий) при V=3 м/с.
В разделе 3.3 теоретически рассмотрена предложенная автором модель поляризации (т.е. приобретения дополнительного потенциала относительно электролита) плоского прямоугольного электрода за счет деформации двойного электрического слоя набегающим потоком электролита. На электрод (рис. 7), поверхность которого покрыта диэлектрической окисной пленкой, набегает поток электролита. На всей его поверхности сформирован двойной электрический слой, а также вязкий ламинарный подслой, характеризующийся линейным законом нарастания скорости по оси Z. Набегающий поток на передней границе электрода сдвигает диффузную часть двойного слоя, заменяя ее электронейтральным электролитом; то есть сдвигается одна из обкладок конденсатора, образованного двойным слоем, вторая при этом остается неподвижной. Изменение емкости такого конденсатора приводит к изменению разности потенциалов металл-электролит, которое мы называем напряжением поляризации. Плотная часть двойного слоя удерживается на поверхности электрода силами специфиче-
Z
X
Рис. 7. Расположение электрода в потоке жидкости.
ской адсорбции, в связи с чем край электрода имеет некомпенсированный заряд, поле которого вызывает ток, направленный к электроду. Существует также поверхностный ток, образованный движущейся в направлении оси У диффузной частью двойного слоя. При постоянной скорости потока должно выполняться равенство токов, текущих от электрода и к электроду. Исходя из этого условия, получено выражение, определяющее напряжение поляризации, вызванное набегающим потоком,
Д (р =
ат^£0е ВСУД
где С — емкость двойного слоя, а — коэффициент, зависящий от скорости движения жидкости относительно поверхности электрода; £ — электрокинетический потенциал, зависящий от состава электролита и свойств поверхности; т = 2££0 / сг — постоянная времени релаксации зарядов при деформации двойного слоя; £ — относительная диэлектрическая проницаемость воды; £0- диэлектрическая постоянная; а- проводимость электролита, В — длина электрода; СуД-удельная емкость двойного слоя (Ф/м2). Высказано предположение, что
флуктуации потенциала поляризации за счет деформации двойного слоя при наличии пульсации скорости потока электролита и являются основной компонентой шума движения длительно выдержанных в электролите некорродирующих электродов. На практике реальные электроды имеют на своей поверхности микровыступы, высота которых превышает толщину двойного слоя. Каждый из них ведет себя подобно электроду в рамках рассмотренной модели. В соответствии с полученной формулой напряжение поляризации растет при увеличении скорости потока за счет роста коэффициента а и уменьшается с ростом концентрации электролита в связи с уменьшением С- потенциала. Эти зависимости наблюдались в экспериментах, описанных в разделе 3.1.
В разделе 3.4 описан эксперимент по исследованию поляризации металлического электрода, совершающего гармонические колебания в электролите (раствор №С1), результаты которого подтверждают правильность высказанного предположения о происхождении шума движения. Установлено следующее:
а) возникающее при колебаниях электрода поляризационное напряжение имеет вид зашумленного гармонического колебания с флуктуирующей амплитудой и частотой, равной частоте механических колебаний;
б) напряжение £/с практически синфазно с гармонически изменяющейся скоростью движения электрода;
в) зависимости напряжения Vс от частоты колебаний, а, следовательно, от скорости движения электрода, близки к линейным. Оно возрастает при увеличении частоты и уменьшении солености электролита 5. На рис. 8 приведены результаты измерения напряжения поляризации. Данные экспериментов подтверждают теоретические предпосылки качественно и не противоречат им коли-
чественно. Исследовано влияние обтекателя на поляризацию электрода. Оно также согласуется с результатами натурного эксперимента.
Раздел 3.5 посвящен особенностям конструирования электродных датчиков, предназначенных для работы на движущихся объектах. В разделах 3.2 — 3.4 показано, что величина шума движения определяется пульсацией скорости потока жидкости у поверхности электродов. Поэтому при конструировании электродных датчиков, устанавливаемых на движущихся объектах, основное внимание следует уделять уменьшению скорости движения жидкости у поверхности
и с, мВ
Рис.8. Зависимость напряжения поляризации 1/с от частоты колебаний при разной солености электролита. 1-10 г/л; 2- 5г/л.
электродов. Уменьшение средней скорости обтекающей электрод жидкости ведет и к уменьшению величины пульсации скорости. Предложены оригинальные конструкции электродных датчиков, признанные изобретениями, в которых движение жидкости вблизи электродов практически отсутствует. Это достигается за счет применения пористых перегородок, установленных в торцах и среднем сечении диэлектрической трубы, при этом электроды расположены по обе стороны от центральной пористой перегородки на равных от нее расстояниях. Однако вследствие перепадов давления между торцами диэлектрической трубы возникает просачивание воды сквозь пористые перегородки, сопровождаемое возникновением электрокинетической помехи. Выбор расстояния между электродами в соответствии с полученной расчетной формулой позволяет устранить электрокинетическую помеху на выходе датчика. В условиях движения чувствительность такого датчика доЮ раз выше, чем у датчика без обтекателей.
Глава 4, написанная по публикациям автора [8-13,17], посвящена разработке методов повышения чувствительности безэлектродных датчиков, а именно: маг-нитоиндукционного и трансформаторного датчиков.
В разделе 4.1 выполнена оптимизация конструктивных параметров магнито-индукционного датчика по максимальному отношению сигнал/шум. При этом учитывался только тепловой шум катушки. Показано, что если датчик имеет однослойную катушку, то ее оптимальная длина составляет 0,9 от длины сердеч-ника.В случае многослойной катушки ее оптимальная форма имеет вид «веретена», т.е. число слоев намотки на краях катушки меньше, чем в середине. Получены формулы для числа витков в секциях катушки при числе секций, равном десяти. Показано, что выигрыш в предельной чувствительности оптимизированного датчика достигает 10.¡2, Д /О, = \[ё, где Ц, Д,£)3 -соответственно внутренний и внешний диаметр кольцевого сердечника, а также диаметр окна датчика после намотки катушки. В результате оптимизации коэффициент преобразования может быть повышен в несколько раз.
В разделе 4.3 определена предельная чувствительность трансформаторного датчика на низких частотах. Показано, что на частотах выше некоторой / она
определяется только его геометрическими размерами и не зависит от числа витков катушки и магнитной проницаемости сердечника.
Раздел 4.4 посвящен проблеме повышения помехозащищенности трансформаторного датчика. Для компенсации виброшумов и помех промышленного происхождения, возникающих несмотря на наличие магнитного экрана, предлагается использовать датчик, имеющий две идентичные катушки, расположенные как можно ближе друг к другу, одинаково ориентированные и механически жестко соединенные. При этом катушки соединены таким образом, что образующиеся в каждой из них ЭДС индукции при вибрации в геомагнитном поле или при воздействии магнитного поля от промышленного источника помех вычитаются. При этом напряжение полезного сигнала в одной из предложенных конструкций датчика удваивается, что позволяет повысить отношение сигнал-шум.
В разделе 4.5 проведено сравнение электродных и безэлекгродных датчиков по достигаемой предельной чувствительности. Сделан вывод, что в диапазоне 3…300 Гц наивысшую предельную чувствительность обеспечивает электродный датчик.
В разделе 4.6 показана возможность защиты индуктивных элементов входных цепей, например, согласующего трансформатора, от влияния вибрации в магнитном поле Земли, проявляющегося в виде виброшумов, с помощью электромагнитного экрана.
В разделах 2.5 и 4.1 описаны примеры использования результатов диссертации для повышения чувствительности электродных и магнитоиндукционных датчиков при выполнении других научных экспериментов [18,19].
В заключении сформулированы основные результаты исследований.
Основные результаты работы
1. Исследован рад металлов и металлических покрытий на их пригодность для использования в электродных датчиках. Показано, что наиболее пригодными являются некорродирующие металлы, имеющие на поверхности плотную пленку окисла, из которых мы рекомендуем титан, тантал, нержавеющую сталь.
2. Получены расчетные формулы, определяющие предельную чувствительность приемного устройства с электродным датчиком при резонансном и нерезонансном трансформаторном согласовании. Получены выражения, определяющие коэффициент трансформации, при котором достигается наивысшая предельная чувствительность. Рекомендуется нерезонансное согласование, как менее чувствительное к изменению составляющих импеданса датчика.
3. Проведены исследования шума электродных датчиков в отсутствие движения. На частотах ниже нескольких десятков герц даже у некорродирующих металлов (таких, как тантал, титан) обнаружен избыточный электрохимический шум, не исчезающий и через несколько суток выдержки в морской воде. У этих металлов отношение избыточного шума к тепловому на частотах ниже 10 Гц по напряжению достигает нескольких раз, а на более высоких частотах избыточный шум у длительно выдержанных в электролите электродов из таких металлов, как правило, меньше теплового. Спектр напряжения избыточного шума имеет вид /'», для танталовых электродов а «1,5. Спектральная плотность напряжения как теплового, так и избыточного шума уменьшается с увеличением площади электрода, а отношение избыточного шума к тепловому изменяется незначительно.
4. Исследован шум электродных датчиков, возникающий при их движении относительно морской воды. Превышение его над тепловым шумом по напряжению достигает у корродирующих электродов нескольких порядков, а у некорродирующих — до одного порядка. Именно он и определяет чувствительность малогабаритных буксируемых датчиков. Спектральные зависимости шумового напряжения в лабораторных экспериментах имеют вид /~а ■ При скорости движения жидкости 2…3,5 м/с у титановых электродов а »1,5. Показано, что напряжение шума при движении жидкости обратно пропорционально квадратному корню из площади электродов. Обнаруженная нами зависимость коррозионного шума движения от скорости жидкости положена в основу способа измерения скорости потока жидкости, признанного изобретением.
5. Обнаружена связь шума движения с пульсациями скорости жидкости, в частности, с турбулентностью, и зависимость его от солености. Основываясь на этих зависимостях, автор предложил и исследовал модель поляризации электрода (приобретения дополнительного потенциала по отношению к электролиту), связанную с деформацией двойного электрического слоя на поверхности электрода набегающим потоком жидкости. При этом шум движения у некорродирующих электродов есть флуктуации потенциала электрода, связанные с флуктуациями скорости потока. Получена формула, определяющая напряжение
поляризации плоского электрода. Проведенные измерения напряжения поляризации электрода, совершающего гармонические колебания в электролите, подтвердили теоретические предпосылки, следующие из полученной формулы.
6. Экспериментально исследована роль обтекателей, снижающих скорость движения жидкости у поверхности электродов. Установлено, что применение обтекателей позволяет уменьшить шум движения электродного датчика на 15 -20 дБ.
7. Разработаны рекомендации по конструированию электродных датчиков, имеющих минимальный уровень собственного шума. Предложен способ уменьшения виброшумов, возникающих в индуктивных элементах (например, входных трансформаторах), путем размещения их в электромагнитном экране из немагнитного металла.
8. Разработана методика оптимизации магнитоиндукционного датчика, позволяющая достичь максимальной предельной чувствительности за счет выбора формы катушки. Разработана методика оптимизации конструктивных параметров трансформаторного датчика, которая при заданных габаритах позволяет в несколько раз увеличить коэффициент преобразования.
9. Определена предельная чувствительность магнитоиндукционного и трансформаторного датчиков. Показано, что в диапазоне 3…300 Гц электродный датчик имеет наивысшую из рассмотренных типов датчиков предельную чувствительность.
10. По результатам проведенных исследований предложены новые конструкции электродных и безэлектродных датчиков, признанные изобретениями. В условиях буксировки и вибрации они имеют более высокую чувствительность, чем известные.
Список публикаций по теме диссертации
1. Акиндинов, В.В. Шумы электродных датчиков в морской воде / В.В. Акин-динов., И.В Лишин., В.Г Максименко //Радиотехника и электроника. — 1984. -Т.29, №3. -С. 484-490.
2. Максименко, В.Г. Импедансные характеристики и предельная чувствительность электродных датчиков электромагнитного поля в морской воде / В.Г. Максименко // Радиотехника и электроника. -2006. — Т. 51, № 7. — С. 786-795.
3. Максименко, В.Г. О применении входного трансформатора в высокочувствительной измерительной аппаратуре СНЧ диапазона / В.Г. Максименко // Исследование естественных случайных радиополей в диапазонах КНЧ, СНЧ и ОНЧ: сб. трудов под ред. акад. Ю.Б. Кобзарева / ИРЭ АН СССР. — М., 1985. — С. 118123.
4. Максименко, В.Г. Проблемы уменьшения собственного шума электродных датчиков электрического поля, движущихся в электролите / В.Г. Максименко // Радиотехника и электроника. — 2002. — Т.47, №7. — С. 809-813.
5. Максименко, В.Г. «Шум движения» электродных датчиков электрического поля в море и пути его уменьшения / В.Г. Максименко, В.И. Нарышкин // Радио-
техника и электроника. — 2003. — Т.48, №1. — С. 70-76.
6. Акиндинов, В.В. Экспериментальные исследования поляризации металлического электрода при движении в электролите / В.В. Акиндинов, В.Г. Максимен-ко // Радиотехника и электроника. — 1996. — Т.41, №8. — С. 985-989.
7. Максименко, В.Г. Поляризация металлического электрода при движении в электролите/ В.Г. Максименко // Радиотехника и электроника. — 1997,- Т.42, №2 .-С. 210-213.
8. Максименко, В.Г. Добротность тороидальных катушек индуктивности на низких частотах / В.Г. Максименко // Радиотехника. — 1990. — №6. — С. 91-93.
9. Максименко, В.Г. Оптимизация входного трансформатора низкой частоты на кольцевом сердечнике / В.Г. Максименко // Радиотехника. — 1990. — Ns8. — С. 2224.
10. Максименко, В.Г. Оптимизация магнитной антенны СНЧ диапазона / В.Г. Максименко // Радиотехника. — 1990. — №4. — С. 88-90.
8. Максименко В.Г. Оптимизация морского трансформаторного датчика переменного электрического поля // Измерительная техника. — 2007. -№4,, с. 59-61
12. Максименко В.Г. Предельная чувствительность трансформаторного датчика переменного электрического поля в море // Измерительная техника. — 2008. -№7.-С. 51-53.
13. Максименко, В.Г. Экранирование катушки индуктивности от воздействия статического магнитного поля / В.Г. Максименко // Радиотехника и электроника.
— 1994.-Т.39,№1.-С. 73-75.
14. A.c. 1067360, МКИ5 G01 V 3/06. Способ измерения скорости потока жидкости/ В.В. Акиндинов, И.В. Лишин, В.Г. Максименко (РФ).
» — №3341827/18-10, заявл. 11.09.81; опубл. 15.01.84, Бюл.№2.
15. A.c. № 1409959, МКИ4 G01 V 3/06. Датчик напряженности электрического поля/ В.В. Акиндинов, И.В. Лишин, В.Г. Максименко (РФ).
— № 4169962/31-25; заявл. 30.12.86, опубл. 15.04.89, Бюл. №7.
16. A.c. 1629890, МКИ5 G01 V 3/08. Датчик напряженности электрического поля/ В.В. Акиндинов, И.В. Лишин, В.Г. Максименко (РФ).
— № 4677887/25; заявл.12.04.89, опубл. 23.02.91, Бюл. № 7.
17. A.c. 1697524, МКИ5 G01 V 3/06. Устройство для измерения напряженности электрического поля в электролитах/ И.В. Лишин, В.Г. Максименко (РФ). №4757895/25; заявл. 10.11.89; опубл.20.07.99, Бюл. № 20.
18. Дякин В.А. Возможность обнаружения подводного кабеля по переизлучаемому им электромагнитному полю / В.А. Дякин, A.C. Гугин, В.И. Каевицер, С.И. Киселев, И.В. Лишин, В.Г. Максименко, Н.И. Михалев, В.И. Нарышкин // Радиотехника и электроника. — 2002. — Т. 47, № 11. — С. 1296 — 1303.
19. Каевицер В.И. Радиофизический метод измерения координат и глубины расположения электрического кабеля, проложенного по дну водоема/ В.И. Каевицер, И.В. Лишин, В.Г. Максименко, В.И. Нарышкин, В.А. Дякин, A.B. Гашев-ский, О.С. Гашевская // Радиотехника и электроника. — 2004. — Т. 49, № 4. — С. 450 -453.
Подписано в печать 12.12.2008. Формат 60×84 1/16.
Бумага офсетная. Печать офсетная. Усл. печ. л. 0,93. Усл. кр.-отт. 3,72. Уч.-изд. л. 1,0. Тираж 100 экз. Заказ 704
Государственное образовательное учреждение высшего профессионального образования «Московский государственный институт радиотехники, электроники и автоматики (технический университет)» 119454, Москва, пр. Вернадского, 78
Чувствительность приемника — обзор
8.3.1 Чувствительность приемника
Чувствительность приемника — одна из наиболее широко используемых характеристик оптических приемников в волоконно-оптических системах. Он определяется как минимальный уровень оптической мощности сигнала, требуемый на приемнике для достижения определенной производительности BER. Например, в оптической системе, чтобы BER составлял менее 10 –12 без FEC, минимальная оптическая мощность сигнала, достигающего приемника, должна быть не менее -35 дБмВт; это означает, что чувствительность приемника — 35 дБмВт.Очевидно, что определение чувствительности приемника зависит от целевого уровня BER и скорости передачи данных сигнала. Однако искажение формы сигнала и оптическое отношение сигнал / шум, как правило, четко не указаны в определении чувствительности приемника, но предполагается, что шум, исходящий от приемника, является основным ограничивающим фактором производительности системы.
Теперь мы рассмотрим два типа оптических приемников, показанных на рис. 8.3.1, в которых конфигурация (a) представляет собой простой фотодиод с PIN-кодом, за которым следует трансимпедансный усилитель (TIA), тогда как конфигурация (b) имеет оптический предусилитель, добавленный в перед PIN-кодом для повышения уровня мощности оптического сигнала.
Рис. 8.3.1. Приемники прямого обнаружения с (A) и без (B) оптического предусилителя.
Сначала рассмотрим простейшую конфигурацию приемника, показанную на рис. 8.3.1A. Если на мгновение пренебречь искажением формы волны и влиянием перекрестных помех в оптическом сигнале, значение Q будет зависеть только от электрического отношения сигнал / шум после фотодетектирования. В системе с модуляцией интенсивности и прямым обнаружением (IMDD) на чувствительность приемника влияют тепловой шум, дробовой шум и шум темнового тока фотодиода.Уравнение (8.2.1) можно записать как
(8.3.1) Q = 2ℜPave4kT / RL + 4qℜPave + 2qIdkBe + 4kT / RL + 2qIdkBe
На рис. 8.3.2 показано вычисленное значение Q приемника в виде функции. оптической мощности принимаемого среднего сигнала P ср . Это двоичная система со скоростью 10 Гбит / с с прямым обнаружением, а электрическая полоса пропускания приемника составляет B e = 7,5 ГГц. Другие используемые параметры: ℜ = 0,85 мА / мВт , R L = 50 Ом, I d = 5 нА и T = 300 К.На рис. 8.3.2 показано, что для достижения BER 10 — 12 или, что эквивалентно Q = 7 (10log 10 ( Q ) = 8,45 дБ по вертикальной оси), принимаемая средняя оптическая мощность сигнала должно быть не менее -19 дБм. Следовательно, чувствительность этого приемника 10 Гбит / с составляет -19 дБмВт. Каждое уменьшение оптической мощности сигнала в дБ приведет к уменьшению в дБ значения Q , как показано на рисунке 8.3.2.
Рис. 8.3.2. График чувствительности приемника (сплошная линия) для системы со скоростью 10 Гбит / с с использованием фотодиода PIN.Пунктирные, штрихпунктирные и пунктирные линии представляют расчет Q , учитывающий только тепловой шум, дробовой шум и шум темнового тока по отдельности.
Сравнивая влияние теплового шума, дробового шума и шума темнового тока на значение Q , становится очевидным, что тепловой шум доминирует в этом типе приемника прямого обнаружения вблизи заданного уровня BER. Другими шумами можно спокойно пренебречь, не внося заметных ошибок.
В приемнике с преобладанием теплового шума, если мы дополнительно рассмотрим искажение формы сигнала с A <1 и B > 0 [относительно маски глаз-диаграммы, определенной на рис.8.2.2B], значение Q становится
(8.3.2) Q = RL4kTBeℜA − BPave
Для целевой производительности Q = 7 чувствительность приемника может быть найдена как
(8.3.2). 3) Psen = 7ℜA − B4kTBeRL
, что обратно пропорционально штрафу за закрытие глаза ( A — B ).
С другой стороны, если дробовой шум является единственным источником шума, а другие шумы незначительны (например, если сопротивление нагрузки R L очень высокое), значение Q будет Q = ℜPave / qBeA − B.Поскольку ℜ = ηq / ( hv ) с η квантовой эффективностью и hv фотоэнергетикой, ограниченное дробовым шумом значение Q может быть выражено как Q = ηPave / hvBeA − B . В идеальном случае со 100% квантовой эффективностью и без искажения формы волны Q = Pave / hvBe. Это соответствует чувствительности приемника P sen = 49 hvB e для Q = 7. Предполагая эффективность полосы пропускания 1 бит / Гц, эту чувствительность приемника обычно называют квантово-ограниченная эффективность обнаружения, которая в данном случае составляет 49 фотонов на бит.Другими словами, для каждого бита информации требуется 49 фотонов для достижения значения Q , равного 7.
Для повышения чувствительности приемника можно добавить оптический предусилитель перед фотодиодом с PIN-кодом, как показано на рис. . 8.3.1B. Поскольку оптический предусилитель является частью оптического приемника, чувствительность приемника определяется как минимальная оптическая мощность, которая достигает предусилителя для достижения целевого значения Q . Оптический предусилитель увеличивает оптическую мощность сигнала до того, как он достигает фотодиода, но он также вносит оптический шум в процесс усиления.В этом случае уровень спектральной плотности мощности шума УСИ пропорционален коэффициенту усиления оптического предусилителя. Тем не менее, значение Q приемника все еще увеличивается с увеличением оптической мощности входного среднего сигнала P ave , но не линейно. Если мы пренебрегаем искажением формы сигнала так, чтобы средняя мощность сигнала была равна 1/2 мгновенной мощности в цифровом сигнале 1, значение Q можно вычислить с помощью
(8.3.4) Q = 2ℜPr2q2ℜPr + Id + 4kTRL + 4ρASEℜ2Pr + ρASE2ℜ22Bo − BeBe + 2qId + 4kTRL + ρASE2ℜ22Bo − BeBe
, где P r = GP средняя оптическая мощность усиленного оптического сигнала который достигает фотодиода PIN. В оптическом приемнике с предусилителем P r обычно фиксируется на достаточно высоком уровне около 0 дБм, так что вклад теплового шума и темнового тока становится незначительным по сравнению с шумами, зависящими от сигнала.В таком случае коэффициент усиления оптического предусилителя становится функцией оптической мощности входного сигнала, как и уровень шума ASE. Для оптического предусилителя с коэффициентом шума F = 5 дБ, что соответствует n sp = 1,58, а при длине волны сигнала 1550 нм спектральная плотность оптической мощности шума ASE составляет
(8,3 .5) ρASE = 2nsphcλG − 1 = 4 × 10−19PrPave − 1
в единицах Ватт на Герц. На рис. 8.3.3 (кривая, отмеченная «total») показано рассчитанное значение Q приемника как функция принятой средней оптической мощности сигнала P ср на входе предусилителя EDFA.Влияние вклада каждого шумового члена отдельно показано на рис. 8.3.3. Параметры, используемые в расчетах: P r = 0 дБм, R L = 50 Ом, I d = 5 нА, T = 300 K, B 0 = 25 ГГц, B e = 7,5 ГГц и λ = 1550 нм. В этом случае чувствительность приемника составляет P sen = −41.8 дБм (для Q = 7), что примерно на 23 дБ лучше, чем у приемника прямого обнаружения без предусилителя EDFA.
Рис. 8.3.3. График чувствительности приемника для системы 10 Гбит / с с приемником PIN-кода с оптическим предусилителем.
В приемнике PIN с оптическим предусилителем, поскольку оптическая мощность сигнала P r на выходе предусилителя поддерживается постоянной, тепловой шум, дробовой шум и шум темнового тока являются постоянными и не зависят от входной оптической мощности П пр. .В этом примере, показанном на рис. 8.3.3, значения Q , соответствующие тепловому шуму, дробовому шуму и шуму темнового тока, составляют 27,5, 29,2 и 54 дБ, соответственно, и их вклад в общее значение Q практически незначительный. Доминирующий шумовой член, который ограничивает значение Q приемника вблизи целевого уровня BER Q = 7, представляет собой шум биений ASE сигнала, что легко увидеть из рисунка 8.3.3.
Если мы только рассмотрим влияние шума биений сигнала ASE, уравнение.(8.3.4) можно значительно упростить:
(8.3.6) Q = PrρASEBe = Pr2nsphc / λG − 1Be≈Pave2nsphc / λBe
Здесь предполагается G ≫ 1, так что G — 1 ≈ G . В этом случае значение Q пропорционально Pave, а не P ave , как в приемнике PIN без предварительного усиления. Это полезно, потому что P ave обычно очень мало, так что Pave >> Pave всегда верно. В ПИН-приемнике с предусилителем для каждого уменьшения оптической мощности сигнала в дБ наблюдается уменьшение только на половину дБ в 10 log ( Q ).
С приближением, учитывающим только шум биений сигнала-ASE в расчете Q оптического приемника с предварительным усилением PIN, мы можем рассмотреть влияние искажения формы волны, предполагая, что A <1 и B > 0 [относится к глазу маска определена рис. 8.2.2B]. В этом случае числитель уравнения. (8.1.13) равно 2 ( A — B ) ℜP r , а члены знаменателя равны σ 1 = 4 ρ ASE ℜ 2 AP r и σ 0 = 4 ρ ASE ℜ 2 BP r , так что Q -значение становится
(8.3.7) Q = PrρASEBeA − B = Pave2nsphc / λBeA − B
По сравнению с простым приемником PIN, где Q ∝ ( A — B ), приемник PIN с оптическим предусилителем имеет Q∝A − B. Для открытой глазковой диаграммы с A > 0,5 и B <0,5, A − B Существует тип фильтра, который обычно используется для удовлетворения этих требований.Он называется «фильтр с приподнятым косинусом» и имеет регулируемую полосу пропускания, управляемую коэффициентом «спада». Компромисс будет заключаться в том, что полоса пропускания сигнала станет немного шире, и, следовательно, для передачи сигнала потребуется больший частотный спектр. В таблице 17.3 приведены характеристики приподнятого косинуса, показанные на рисунке 17.8, для различных коэффициентов спада. Эти метки также используются на рисунках 17.9 и 17.10. Таблица 17.3. Таблица спада частоты повышенного косинусного фильтра Чувствительность приемника — обзор
17.4 Фильтр приподнятого косинуса
| Коэффициент спада | Этикетка | Комментарии — избыточная полоса пропускания означает процент необходимой дополнительной полосы пропускания по сравнению с идеальным фильтром нижних частот |
|---|---|---|
| 0.10 | A | Требуется длинная импульсная характеристика (большие ресурсы множителя), имеет небольшую полосу пропускания избыточной частоты 10% |
| 0,25 | B | Обычно используемый коэффициент спада, избыточная полоса пропускания 25% |
| 0,50 | C | Обычно используемый коэффициент спада, избыточная полоса пропускания 50% |
| 1,00 | D | Избыточная полоса пропускания 100%, никогда не использовалась на практике |
Рисунок 17.8. Частотная характеристика повышенного косинусоидального фильтра.
Рисунок 17.9. Импульсная характеристика с приподнятым косинусом.
Рисунок 17.10. Увеличенный импульсный отклик с приподнятым косинусом.
На рисунке 17.8 показана частотная характеристика фильтра с приподнятым косинусом. Чтобы лучше видеть форму полосы пропускания, она строится линейно, а не логарифмически (дБ). Он имеет частоту среза 500 кГц, как и наш идеальный фильтр нижних частот. Ответ фильтра с приподнятым косинусом шире, чем у идеального фильтра нижних частот, из-за переходной полосы.Эта избыточная полоса частот регулируется параметром, называемым коэффициентом спада. Амплитудно-частотная характеристика построена для нескольких различных коэффициентов спада. Когда коэффициент спада приближается к нулю, переход становится более крутым, и фильтр приближается к идеальному фильтру нижних частот.
Импульсная характеристика фильтра с приподнятым косинусом изображена на рисунке 17.9, который показывает импульсную характеристику фильтра, а рисунок 17.10 увеличен, чтобы лучше показать лепестки импульса фильтра. Опять же, это график для нескольких различных факторов спада.Он похож на импульсную характеристику sinc в том смысле, что он имеет нулевые пересечения на временных интервалах T (поскольку это показано в области выборки, а не во временной области, это не сразу видно из диаграммы).
По мере того, как избыточная полоса пропускания уменьшается, чтобы приблизиться к идеальной частотной характеристике фильтра нижних частот, лепестки в импульсной характеристике становятся выше, приближаясь к импульсной характеристике sinc. Сигнал с меньшими лепестками амплитуды имеет большую избыточную полосу пропускания или более широкий спектр.
Фильтр формирования импульсов должен иметь нулевой отклик с интервалами T во времени, чтобы импульсный отклик данного символа не влиял на сигнал во время выборки соседних символов.Он также должен минимизировать высоту лепестков импульсной (временной) характеристики и быстро затухать, чтобы снизить чувствительность к ISI, если приемник не производит выборку точно в правильное время для каждого символа. По мере увеличения коэффициента спада именно это и происходит на рисунках (D). Импульсная характеристика очень быстро стремится к нулю, а доли импульсной характеристики фильтра очень малы. Однако у них чрезмерно широкий частотный спектр. Лучшим компромиссом будет коэффициент спада где-то между 0.25 и 0,5 (B и C). Здесь импульсная характеристика затухает относительно быстро с небольшими лепестками, что требует фильтра формирования импульса с небольшим количеством отводов, при этом сохраняя разумную требуемую полосу пропускания.
Коэффициент спада определяет компромисс между:
- •
-
требованиями к спектральной полосе пропускания.
- •
-
длина или количество отводов фильтра формирования импульсов.
- •
-
чувствительность приемника к ISI.
Еще одним важным аспектом фильтра формирования импульсов является то, что это всегда интерполирующий фильтр. На рисунках это показано как фильтр с четырехкратной интерполяцией. Если внимательно посмотреть на импульсную характеристику на рисунке 17.10, переход через ноль происходит каждые четыре отсчета. Это соответствует t = N · T во временной области из-за 4-кратной интерполяции.
Фильтр формирования импульсов должен быть интерполирующим фильтром, так как сигналы основной полосы частот I и Q должны соответствовать критерию Найквиста.В этом примере скорость передачи символов составляет 1 MSPS. При использовании высокого коэффициента спада спектр модулирующих сигналов I и Q может достигать 1 МГц. Таким образом, требуется минимальная частота дискретизации 2 МГц, что в два раза больше символьной скорости. Следовательно, фильтр формирования импульсов должен будет интерполировать, по крайней мере, в два раза, и часто интерполируется значительно выше этого.
Используя импульсные и интерполированные цифровые сигналы I и Q основной полосы частот, цифро-аналоговые преобразователи создают аналоговые сигналы I и Q основной полосы частот.Эти сигналы могут использоваться для управления аналоговым микшером, который может создавать сигнал полосы пропускания. Сигнал полосы пропускания — это сигнал основной полосы частот, преобразованный с повышением частоты или смешанный с несущей частотой. Этот процесс также может быть выполнен в цифровом виде, с использованием ЦАП на гораздо более высокой частоте для вывода сигнала на несущей частоте.
Например, при использовании фильтра спада 0,25 для модулятора 1 MSPS, сигналы I и Q основной полосы частот будут иметь полосу пропускания 625 кГц. Используя несущую частоту 1 ГГц, для передаваемого сигнала потребуется около 1.Спектр 25 МГц с центром на частоте 1 ГГц.
До сих пор наше внимание уделялось тракту передачи. Путь приема очень похож. Сигнал преобразуется с понижением частоты или сводится к основной полосе частот. Процесс демодуляции начинается с сигналов I и Q основной полосы частот. Ресивер более сложный, так как он должен решать несколько дополнительных проблем. Могут присутствовать соседние сигналы, которые могут мешать процессу демодуляции, которые необходимо отфильтровать, обычно с помощью комбинации аналоговых и цифровых фильтров. Заключительным этапом цифровой фильтрации часто является тот же самый фильтр-формирователь импульсов, который используется в передатчике, называемый согласованным фильтром.Идея состоит в том, что тот же фильтр, который использовался для создания сигнала, также используется для фильтрации спектра перед выборкой, максимизируя количество энергии сигнала, используемой в процессе обнаружения (или процесса выборки). Поскольку мы используем один и тот же фильтр в передатчике и приемнике, фильтр с приподнятым косинусом обычно модифицируется до фильтра с квадратным корнем с приподнятым косинусом. Частотная характеристика фильтра с приподнятым косинусом изменяется, чтобы быть квадратным корнем из амплитуды в полосе пропускания. Это также изменяет импульсную характеристику.Это показано на рисунках ниже для тех же коэффициентов спада.
Рисунок 17.11. АЧХ с квадратным корнем из приподнятого косинуса.
Рисунок 17.12. Импульсная характеристика с квадратным корнем из приподнятого косинуса.
Поскольку сигнал проходит через оба фильтра, результирующая частотная характеристика представляет собой фильтр с приподнятым косинусом. После прохождения через фильтр формирования импульса приема (также называемый согласованным) сигнал дискретизируется. Используя измеренные значения I и Q, приемник выберет точку созвездия в плоскости I-Q, ближайшую к измеренному значению.Биты, соответствующие этому символу, восстанавливаются, и, если все прошло хорошо, приемник выбрал ту же точку символа, которую выбрал передатчик. Это очень упрощенно, но это суть процесса цифровой связи.
Видно, почему при передаче 64-QAM будет легче иметь ошибки, чем при QPSK. Приемник имеет 64 близко расположенных символа для выбора в случае 64-QAM, тогда как в QPSK есть только четыре широко разнесенных символа для выбора.Это делает системы 64-QAM гораздо более восприимчивыми к ISI, шуму или помехам. Как вариант, можно просто передать сигнал 64-QAM с более высокой мощностью, чтобы разбросать символы дальше друг от друга. Это эффективный, но очень дорогой способ уменьшить шум и помехи, которые мешают правильному обнаружению символа в приемнике. Кроме того, мощность передачи часто ограничивается регулирующими органами, или передатчик может питаться от батареи или иметь другие ограничения.
У ресивера также есть ряд других проблем, с которыми нужно бороться.Предполагается, что выборка происходит в правильный момент времени, когда один символ имеет ненулевое значение в сигнале. Приемник должен определить это правильное время выборки, обычно путем комбинации проб и ошибок во время начальной части приема, а иногда и путем передачи передатчиком заранее определенной (или обучающей) последовательности, известной как передатчику, так и приемнику. Этот процесс известен как получение, когда приемник пытается точно настроить время выборки, скорость передачи символов, точную частоту и фазу несущей и другие параметры, которые могут потребоваться для демодуляции принятого сигнала с минимумом ошибок.И как только вся эта информация определена, ее все равно необходимо отслеживать, чтобы учесть различия в тактовых частотах передачи и приема или другие нарушения.
Рисунки 17.13 и 17.14 представляют собой графики созвездия 16-QAM и 64-QAM после дискретизации фактическим цифровым приемником — беспроводной системой WiMax, работающей в присутствии шума. Каждый сигнал приемника имеет одинаковую среднюю энергию. Приемник действительно хорошо справляется с обнаружением, так что каждая точка созвездия хорошо видна.По мере увеличения уровня шума приемника выборки совокупности быстро начнут дрейфовать вместе в созвездии 64-QAM, и будет невозможно точно определить, в какую точку совокупности должен отображаться данный символ. Система 16-QAM более устойчива при наличии аддитивного шума и других искажений, чем 64-QAM.
Рисунок 17.13. 16-QAM восстановленное созвездие.
Рисунок 17.14. 64-QAM восстановленное созвездие.
Представленные в этой главе идеи mo dulation и dem odulation (модем) используются в большинстве цифровых систем связи, включая спутниковые, кабельные и оптоволоконные системы, используемые для передачи видеосигналов.В QPSK все четыре символа имеют одинаковую амплитуду. Фаза в комплексной плоскости — это то, что отличает разные символы, каждый из которых расположен в разных квадрантах. Для QAM амплитуда и фаза символа необходимы, чтобы различать конкретный символ.
В общем, системы связи полны компромиссов. Самая важная из них исходит из известной теоремы, разработанной Клодом Шенноном, которая дает максимальную теоретическую скорость передачи данных, которая может быть передана по каналу, известную как предел Шеннона.Это зависит от полосы пропускания, мощности передачи и уровня шума приемника и дает максимальную скорость передачи данных, которая может быть отправлена по каналу или каналу с заданным уровнем шума и полосой пропускания.
Приемник Чувствительность приемника »Электроника
Чувствительность радиоприемника — ключевой рабочий параметр любой системы радиосвязи и т. Д., И она ограничена системным шумом.
Чувствительность радиоприемника Включает:
Основы чувствительности приемника
Соотношение сигнал шум
SINAD
Коэффициент шума, НФ
Шумный этаж
Взаимное перемешивание
Чувствительность радиоприемника определяет самые слабые сигналы, которые могут быть успешно приняты.Независимо от того, идет ли речь о приеме радиосигналов, несущих звук, качество прослушивания которых ухудшается из-за того, что сигнал попадает в шум, или сигнала данных, где частота ошибок по битам возрастает, а пропускная способность падает, отношение сигнал / шум важно в любой конструкции радиочастотной схемы. .
Таким образом, чувствительность радиоприемника является ключевым параметром, который влияет на производительность любой системы радиосвязи, вещания или другой системы.
Фактически, два основных требования к любому радиоприемнику состоят в том, чтобы он мог отделять одну станцию от другой, т.е.е. селективность и чувствительность, так что сигналы могут быть доведены до уровня, достаточного по сравнению с шумом, чтобы иметь возможность использовать модуляцию, применяемую к переданной несущей. В результате при проектировании ВЧ-схемы разработчики приемников борются со многими параметрами, чтобы убедиться, что оба эти требования и многие другие выполнены.
Спектр белого шумаВЧ-дизайн любого радиоприемника требует, чтобы общая схема, а также электронные компоненты обеспечивали оптимальную производительность в пределах других конструктивных ограничений.
Методы задания показателей чувствительности
Поскольку характеристика чувствительности любого приемника к ВЧ имеет первостепенное значение, необходимо иметь возможность указать ее значимым образом. В зависимости от предполагаемого применения используется ряд методов и показателей качества:
- Отношение сигнал / шум: Это прямое сравнение отношения заданного уровня сигнала к шуму в системе и полезная мера чувствительности радиоприемника.Хотя обычно SNR используется для ВЧ-радиостанций. Обычно характеристики чувствительности радиоприемника приводятся в терминах заявленного входного напряжения для обеспечения отношения сигнал / шум 10 дБ. Хотя 10 дБ является стандартным коэффициентом, иногда можно использовать 15 дБ или другие значения.
- SINAD: Это измерение чувствительности приемника немного более формализовано, чем простое отношение сигнал / шум, SNR, и оно также включает искажения, а также шум при измерении.
SINAD часто используется с радиостанциями VHF FM и портативными устройствами / рациями, такими как те, которые используются для радиосвязи малого радиуса действия. Хотя он, как правило, широко используется для радиостанций VHF / UHF FM, раций и других форм наборов, которые, как правило, используются для приложений радиосвязи, его также можно использовать для AM и SSB.
- Коэффициент шума: Это измерение РЧ-приемника сравнивает шум, добавляемый устройством — это может быть усилитель или другое устройство в системе, или это может быть полный приемник.Фактор шума обычно отображается в формате с децибелами, используемыми для сравнения уровней, и поэтому он известен как коэффициент шума. . . . . .
- Коэффициент шума: Коэффициент шума или NF устройства или системы является логарифмической версией коэффициента шума. Он широко используется для определения чувствительности и шумовых характеристик приемника, элемента в системе или всей системы.
- Отношение несущая / шум, CNR: Отношение несущая / шум — это отношение сигнал / шум (SNR) модулированного сигнала.Этот термин менее широко используется, чем SNR, но может использоваться, когда есть необходимость различать рабочие характеристики в отношении радиочастотного сигнала полосы пропускания и аналогового сигнала сообщения основной полосы частот после демодуляции.
- Минимальный различимый сигнал, MDS: Минимальный обнаруживаемый или минимально различимый сигнал — это наименьший уровень сигнала, который может быть обнаружен радиоприемником, т. Е. Тот, который может быть обработан его аналоговой и цифровой цепочкой сигналов и демодулирован приемником для предоставления полезной информации на выходе.
- Величина вектора ошибки, EVM: Величина вектора ошибки, EVM — это мера, которая может использоваться для количественной оценки производительности цифрового радиопередатчика или приемника. Путем нанесения на график положений синфазных и квадратурных элементов сигнала можно сгенерировать то, что называется диаграммой созвездия.
На диаграмме созвездия установлены различные точки, которые определяют различные цифровые состояния. В идеальном канале передатчик должен генерировать цифровые данные таким образом, чтобы они располагались как можно ближе к этим точкам — канал не должен ухудшать сигнал, так что фактические принятые данные не попадают в эти точки, и приемник также не должен ухудшить эти позиции.
Реально в систему попадает шум и полученные данные не попадают точно на эти позиции. Величина вектора ошибки является мерой того, насколько далеко от идеального положения находятся фактические полученные элементы данных. Иногда EVM может также быть известен как ошибка созвездия приема, RCE. Величина вектора ошибки широко используется в современной передаче данных, включая Wi-Fi, мобильную / сотовую связь и многие системы IoT.
- Частота ошибок по битам, BER: Частота ошибок по битам — это форма измерения, используемая в цифровых системах.По мере того, как уровень сигнала падает или качество связи ухудшается, количество ошибок при передаче — битовых ошибок — увеличивается. Измерение частоты ошибок по битам дает представление об отношении сигнал / шум, но в формате, который часто более полезен для цифровой области.
Все методы определения чувствительности приемника используют тот факт, что ограничивающим фактором чувствительности приемника радиосигналов является не доступный уровень усиления, а уровни присутствующих шумов, независимо от того, генерируются ли они внутри радиоприемника или снаружи.
Профессиональный супергетеродинный радиоприемник типаИзображение предоставлено Icom UK
Шум
Сегодняшние технологии таковы, что достичь очень больших уровней усиления в радиоприемнике не составляет особого труда. Это не ограничивающий фактор. В любой приемной станции или системе радиосвязи ограничивающим фактором является шум — слабые сигналы не ограничиваются фактическим уровнем сигнала, а их маскирует шум. Этот шум может исходить от множества источников.Он может быть уловлен антенной или генерироваться радиоприемником.
Шум, видимый на осциллографеБыло обнаружено, что уровень шума, который воспринимается приемником извне от антенны, падает с увеличением частоты. На ВЧ и частотах ниже этого сочетание галактического, атмосферного и антропогенного шума относительно велико, и это означает, что нет смысла делать приемник особенно чувствительным. Обычно радиоприемники проектируются так, что внутренний шум намного ниже, чем любой принимаемый шум, даже в самых тихих местах.
На частотах выше 30 МГц уровни шума начинают достигать точки, когда шум, создаваемый в радиоприемнике, становится гораздо более важным. За счет улучшения шумовых характеристик радиоприемника становится возможным обнаруживать гораздо более слабые сигналы.
Примечание об электрических / электронных и радиочастотных шумах:
Шум присутствует во всех электронных и радиочастотных цепях. Это ограничивает многие аспекты производительности. Шум возникает из-за множества причин и источников.Понимание того, какие формы шума присутствуют, позволяет настроить производительность системы, чтобы минимизировать влияние шума.
Подробнее о Электрический / электронный и радиочастотный шум.
Ключевые указатели дизайна RF для низкого уровня шума
В любом приемнике важно, чтобы шумовые характеристики и, следовательно, чувствительность учитывались на начальном этапе проектирования ВЧ-схемы. Основные концепции проектирования RF будут определять наилучшие достижимые характеристики чувствительности.Решения, принятые в начале проектирования, могут ограничить общую производительность, которую можно достичь.
С точки зрения шумовых характеристик любого приемника наиболее важными являются первые каскады или входной каскад. На входе уровни сигнала самые низкие, и даже очень небольшой шум может быть сопоставим с входящим сигналом. На более поздних стадиях в радиоприемнике сигнал будет усилен и будет намного больше, поэтому шум будет иметь меньшее влияние.Соответственно, важно, чтобы шумовые характеристики внешнего интерфейса были оптимизированы с учетом его шумовых характеристик.
По этой причине шумовые характеристики первого усилителя радиочастоты в радиоприемнике имеют большое значение. Именно производительность этой схемы имеет решающее значение для определения производительности всего радиоприемника. Для достижения оптимальных характеристик первой ступени радиоприемника существует ряд шагов, которые можно предпринять при проектировании ВЧ-схемы.К ним относятся:
- Определение топологии схемы Первым шагом в любом проекте является выбор типа схемы, которая будет использоваться. Следует ли использовать обычную схему с общим эмиттером или даже с общей базой. Решение будет зависеть от факторов, включая согласующие входные и выходные импедансы, требуемый уровень усиления и используемые согласующие устройства.
-
Определение требуемого усиления Хотя может показаться, что на этом этапе может потребоваться максимальный уровень усиления, чтобы минимизировать уровни усиления, требуемые позже, и таким образом обеспечить оптимизацию шумовых характеристик, это не всегда дело.Для этого есть две основные причины.
Во-первых, шумовые характеристики схемы могут быть ухудшены из-за слишком высокого уровня усиления.
Во-вторых, это может привести к перегрузке на более поздних этапах радиоприемника, и это может ухудшить общие характеристики. Таким образом, требуемый уровень усиления должен определяться исходя из того факта, что необходимо оптимизировать шумовые характеристики этого каскада, и, во-вторых, гарантировать, что последующие каскады приемника не будут перегружены.
-
Выбор активного устройства Тип активного устройства и других электронных компонентов, которые будут использоваться в конструкции радиочастотной схемы, также важны. Обычно есть два решения: должна ли схема быть основана на использовании биполярного переходного транзистора или использовать полевой транзистор.
Приняв это базовое проектное решение RF, очевидно, необходимо выбрать фактическое устройство, которое должно быть определено как устройство с низким уровнем шума.Шумовые характеристики биполярных транзисторов и полевых транзисторов обычно указываются в технических паспортах, и для приложений проектирования ВЧ-схем доступны специальные высокопроизводительные малошумящие устройства.
- Определение тока через активное устройство Проектирование ВЧ-схемы первой ступени радиоприемника должно выполняться с осторожностью. Чтобы получить требуемые РЧ характеристики с точки зрения полосы пропускания и усиления, может потребоваться запустить устройство с относительно высоким уровнем тока.Это не всегда способствует достижению оптимальных шумовых характеристик. Соответственно, конструкция ВЧ-цепи должна быть тщательно оптимизирована, чтобы обеспечить наилучшую производительность для всего радиоприемника.
-
Оптимизация согласования импеданса Чтобы получить наилучшие шумовые характеристики для всего радиоприемника, необходимо оптимизировать согласование импеданса. Можно подумать, что необходимо добиться идеального согласования импеданса.
К сожалению, наилучшие шумовые характеристики обычно не совпадают с оптимальным согласованием импеданса. Соответственно, при проектировании схемы ВЧ-усилителя необходимо провести некоторую оптимизацию, чтобы обеспечить наилучшие общие характеристики для радиоприемника.
- Использование резисторов с низким уровнем шума Это может показаться очевидным заявлением, но помимо выбора активного устройства с низким уровнем шума, следует также учитывать другие электронные компоненты в схеме. Другой основной вклад — резисторы. Металлопленочные резисторы, используемые в наши дни, включая большинство резисторов для поверхностного монтажа, обычно обладают хорошими характеристиками в этом отношении и могут использоваться по мере необходимости.
- Убедитесь, что шум источника питания, попадающий в цепь, устранен: Источники питания могут создавать шум.В связи с этим необходимо убедиться, что любой шум, создаваемый источником питания радиоприемника, не попадает в РЧ-каскад. Этого можно добиться, обеспечив хорошую фильтрацию линии питания усилителя ВЧ.
Это некоторые из основных соображений по проектированию радиочастотных схем, которые необходимо учитывать при рассмотрении оптимизации характеристик чувствительности радиостанции — другие аспекты также должны быть рассмотрены и приняты во внимание.
Чувствительность радиоприемника можно количественно измерить разными способами, но какой бы метод ни использовался, чувствительность является ключом к его успешной работе.Чем ниже производимый шум, особенно на входных каскадах, тем меньшие сигналы могут быть успешно приняты.
Шумовые характеристики и, следовательно, радиочувствительность должны быть сбалансированы с другими факторами, включая характеристики сильного сигнала и многие другие факторы, и, следовательно, разработка радиоприемника с хорошей чувствительностью может быть сложной задачей.
Другие важные темы по радио:
Радиосигналы
Типы и методы модуляции
Амплитудная модуляция
Модуляция частоты
OFDM
ВЧ микширование
Петли фазовой автоподстройки частоты
Синтезаторы частот
Пассивная интермодуляция
ВЧ аттенюаторы
RF фильтры
Радиочастотный циркулятор
Типы радиоприемников
Радио Superhet
Избирательность приемника
Чувствительность приемника
Обработка сильного сигнала приемника
Динамический диапазон приемника
Вернуться в меню тем Радио.. .
— Fosco Connect
Среди группы оптических приемников приемник считается более чувствительным, если он достигает тех же характеристик при меньшей падающей на него оптической мощности. Критерий качества работы цифровых приемников определяется коэффициентом ошибок по битам (BER), определяемым как вероятность неправильной идентификации бита схемой принятия решения приемника. Следовательно, BER 2 x 10 -6 соответствует в среднем 2 ошибкам на миллион бит.Обычно используемый критерий для цифровых оптических приемников требует, чтобы BER был ниже 1 x 10 -9 . Затем чувствительность приемника определяется как минимальная средняя принимаемая мощность, необходимая приемнику для работы при BER 10 -9 . Поскольку зависит от BER, давайте начнем с вычисления BER.
1. Частота ошибок по битам
На рисунке (a) выше схематично показан флуктуирующий сигнал, принимаемый схемой принятия решения, которая производит его выборку в момент принятия решения t D , определенный посредством восстановления тактовой частоты.Значение I с дискретизацией колеблется от бита к биту около среднего значения I 1 или I 0 , в зависимости от того, соответствует ли бит 1 или 0 в потоке битов. Схема принятия решения сравнивает дискретизированное значение с пороговым значением I D и называет его битом 1, если I> I D , или битом 0, если I D . Ошибка возникает, если I D для бита 1 из-за шума приемника. Ошибка также возникает, если I> I D для бита 0. Оба источника ошибок могут быть включены путем определения вероятности ошибки как
.BER = p (1) P (0 | 1) + p (0) P (1 | 0)
, где p (1) и p (0) — вероятности получения бита 1 и 0 соответственно, P (0 | 1) — вероятность принятия решения о 0 при получении 1, а P (1 | 0) — вероятность принятия решения 1 при получении 0.Поскольку биты 1 и 0 встречаются с одинаковой вероятностью, p (1) = p (0) = 1/2, а BER становится равным
.
На рисунке (b) выше показано, как P (0 | 1) и P (1 | 0) зависят от функции плотности вероятности p (I) выборочного значения I. Функциональная форма p (I) зависит от статистики источники шума, ответственные за колебания тока. Тепловой шум i T хорошо описывается гауссовой статистикой с нулевым средним и дисперсией σ T 2 . Статистика вклада дробового шума i s также приблизительно гауссова для p-i-n приемников, хотя это не относится к APD.Обычное приближение рассматривает i s как гауссову случайную величину как для приемников p-i-n, так и для приемников APD, но с разными σ s 2 , задаваемыми двумя уравнениями, соответственно. Поскольку сумма двух гауссовских случайных величин также является гауссовой случайной величиной, выборочное значение I имеет гауссову функцию плотности вероятности с дисперсией σ 2 = σ s 2 + σ T 2 . Однако как среднее значение, так и дисперсия различаются для битов 1 и 0, поскольку I p равно I 1 или I 0 , в зависимости от полученного бита.Если σ 1 2 и σ 0 2 являются соответствующими дисперсиями, условные вероятности равны
.
, где erfc означает дополнительную функцию ошибок, определенную как
.
Подставив эти два уравнения в уравнение BER выше, BER будет равен
.
Это уравнение показывает, что BER зависит от порога принятия решения I D . На практике I D оптимизирован для минимизации BER.Минимум происходит, когда I D выбран так, чтобы
Последний член в этом уравнении пренебрежимо мал в большинстве случаев, представляющих практический интерес, и I D приблизительно получается из
Явное выражение для I D :
, когда σ 1 = σ 0 , I D = (I 1 + I 0 ) / 2, что соответствует установке порога принятия решения посередине. Так обстоит дело с большинством p-i-n приемников, в шуме которых преобладает тепловой шум (σ T >> σ s ) и он не зависит от среднего тока.Напротив, дробовой шум больше для бита 1, чем для бита 0, поскольку σ s 2 изменяется линейно со средним током. В случае приемников APD BER можно минимизировать, установив порог принятия решения в соответствии с приведенным выше уравнением.
BER с оптимальной настройкой порога принятия решения получается с помощью двух приведенных выше уравнений и зависит только от параметра Q как
, где коэффициент добротности получается из двух предыдущих уравнений и равен
.
Приближенная форма BER получается с помощью асимптотического разложения и является достаточно точной для Q> 3.На рисунке ниже показано, как BER изменяется в зависимости от параметра Q. BER улучшается с увеличением Q и становится ниже 10 -12 для Q> 7. Чувствительность приемника соответствует средней оптической мощности, для которой Q ≈ 6, поскольку BER ≈ 10 -9 при Q = 6. Следующий подраздел дает явное выражение для чувствительности приемника.
2. Минимальная получаемая мощность
Приведенное выше уравнение BER можно использовать для расчета минимальной оптической мощности, необходимой приемнику для надежной работы с BER ниже заданного значения.Для этого параметр Q следует связать с падающей оптической мощностью. Для простоты рассмотрим случай, когда 0 битов не несут оптической мощности, так что P 0 = 0, и, следовательно, I 0 = 0. Мощность P 1 в 1 битах связана с I 1 как
.
, где — средняя принимаемая мощность, определяемая как. Коэффициент усиления APD M включен в это уравнение для общности. Случай p-i-n приемников можно рассмотреть, установив M = 1.
RMA (среднеквадратичные) шумовые токи σ 1 и σ 0 включают вклад как дробового шума, так и теплового шума и могут быть записаны как
σ 1 = (σ с 2 + σ T 2 ) 1/2 и σ 0 = σ T
Если пренебречь вкладом темнового тока, дисперсия шума становится равной
Коэффициент добротности равен
.
Для заданного значения BER Q определяется из уравнения BER, приведенного выше, а чувствительность приемника определяется этим уравнением Q.Простое аналитическое выражение для получается путем решения этого уравнения Q для данного значения Q и дается
Это уравнение показывает, как оно зависит от различных параметров приемника и как его можно оптимизировать. Рассмотрим сначала случай p-i-n приемника, установив M = 1. Поскольку тепловой шум T обычно преобладает для такого приемника, определяется простым выражением
Из приведенного выше уравнения σ T 2 , σ T 2 зависит не только от параметров приемника, таких как R L и F n , но и от скорости передачи данных в полосе пропускания приемника Δf (обычно , Δf = B / 2).Таким образом, увеличивается как в пределе теплового шума. В качестве примера рассмотрим приемник p-i-n 1,55 мкм с R = 1 A / W. Если мы используем σ T = 100 нА в качестве типичного значения и Q = 6, соответствующего BER 10 -9 , чувствительность приемника будет равна или -32,2 дБмВт.
Приведенное выше уравнение показывает, как улучшается чувствительность приемника при использовании приемников APD. Если тепловой шум остается доминирующим, он уменьшается в M раз, и принимаемая чувствительность улучшается в тот же раз.Однако дробовой шум значительно возрастает для ЛФД, и приведенное выше уравнение следует использовать в общем случае, когда вклад дробового шума и теплового шума сопоставим. Подобно случаю SNR, обсуждавшемуся в последнем руководстве, чувствительность приема можно оптимизировать, регулируя усиление APD M. Легко убедиться, что это минимальное значение для оптимального значения M, заданного
.
И минимальное значение равно
.
Улучшение чувствительности приемника, полученное с помощью APD, можно оценить, сравнив следующие два уравнения для приемников p-i-n и APD соответственно:
Это зависит от отношения коэффициентов ионизации k A и больше для ЛФД с меньшим значением k A .Для приемников InGaAs APD чувствительность обычно повышается на 6-8 дБ; такое улучшение иногда называют преимуществом APD. Обратите внимание, что для приемников APD увеличивается линейно с битовой скоростью B (Δf ≈ B / 2), в отличие от ее зависимости для приемников p-i-n. Линейная зависимость от B является общей характеристикой приемников с ограничением дробового шума. Для идеального приемника, для которого σ T = 0, чувствительность приемника получается установкой M = 1 в приведенном выше уравнении и выражается как
.
Сравнение этого уравнения и приведенного выше уравнения показывает снижение чувствительности, вызванное фактором избыточного шума в приемниках APD.
Иногда используются альтернативные меры чувствительности приемника. Например, BER может быть связан с SNR и средним числом фотонов N P , содержащихся в бите «1». В пределе теплового шума σ 0 ≈ σ 1 . Используя I 0 = 0, мы получаем Q = I 1 / 2σ 1 . Поскольку SNR = I 1 2 / σ 1 2 , это связано с Q простым соотношением SNR = 4Q 2 . Поскольку Q = 6 для BER, равного 10 -9 , отношение сигнал / шум должно быть не менее 144 или 21.6 дБ для достижения BER <= 10 -9 . Требуемое значение отношения сигнал / шум изменяется в пределах предела дробового шума. В отсутствие теплового шума σ 0 ≈ 0, поскольку дробовой шум пренебрежимо мал для бита «0», если пренебречь вкладом темнового тока. Поскольку Q = I 1 / σ 1 = (SNR) 1/2 в пределе дробового шума, SNR 36 или 15,6 дБ достаточно для получения BER = 1 x 10 -9 . Было показано, что SNR ≈ ηN P в пределе дробового шума. Используя Q = (ηN P ) 1/2 , BER определяется как
.
Для приемника со 100% квантовой эффективностью (η = 1) BER = 1 x 10 -9 , когда N P = 36.На практике большинству оптических приемников требуется N P ~ 1000 для достижения BER 10 -9 , поскольку их характеристики сильно ограничены тепловым шумом.
3. Квантовый предел фотодетектирования
Выражение BER, полученное выше в пределе дробового шума, не является полностью точным, поскольку его вывод основан на гауссовском приближении для статистики шума приемника. Для идеального детектора (без теплового шума, без темнового тока и 100% квантовой эффективности) σ 0 = 0, поскольку дробовой шум исчезает при отсутствии падающей мощности, и, таким образом, порог принятия решения может быть установлен достаточно близко к Сигнал нулевого уровня.Действительно, для такого идеального приемника 1 бит может быть идентифицирован без ошибок, если обнаружен хотя бы один фотон. Ошибка возникает только в том случае, если 1 бит не может создать даже одну пару электрон-дырка. Для такого небольшого числа фотонов и электронов статистику дробового шума нельзя аппроксимировать гауссовым распределением, и следует использовать точную статистику Пуассона. Если N P — среднее количество фотонов в каждом 1 бите, вероятность генерации m электронно-дырочных пар определяется распределением Пуассона
.BER можно рассчитать с помощью двух следующих уравнений:
Вероятность P (1 | 0) того, что 1 бит будет идентифицирован при получении 0, равна нулю, поскольку пара электрон-дырка не генерируется, когда N P = 0.Вероятность P (0 | 1) получается путем установки m = 0 в приведенном выше уравнении, поскольку в этом случае принимается решение 0, даже если получено 1. Поскольку P (0 | 1) = exp (- N P ), BER определяется простым выражением
BER = exp (- N P ) / 2
Для BER <10 -9 , N P должно превышать 20. Поскольку это требование является прямым результатом квантовых флуктуаций, связанных с падающим светом, его называют квантовым пределом. Каждый 1 бит должен содержать не менее 20 фотонов для обнаружения с BER <10 -9 .Это требование можно преобразовать в мощность, используя P 1 = N P hνB, где B — скорость передачи в битах, а hν — энергия фотонов. Чувствительность приемника, определяемая как, определяется как
.
Величина выражает чувствительность приемника в терминах среднего числа фотонов на бит и относится к N P , когда 0 битов не несут энергии. Его использование в качестве меры чувствительности приемника довольно распространено. В квантовом пределе = 10. Мощность можно вычислить.Например, для приемника 1,55 мкм (hν = 0,8 эВ) = 13 нВт или -48,9 дБм при B = 10 Гбит / с. Большинство приемников работают с отклонением от квантового предела на 20 дБ и более. Это эквивалентно тому, что в практических приемниках обычно превышает 1000 фотонов.
% PDF-1.5 % 682 0 объект> эндобдж xref 682 256 0000000016 00000 н. 0000007462 00000 н. 0000007599 00000 н. 0000005529 00000 н. 0000007760 00000 н. 0000007964 00000 н. 0000008171 00000 п. 0000008904 00000 н. 0000008953 00000 п. 0000009135 00000 н. 0000009188 00000 п. 0000011366 00000 п. 0000013372 00000 п. 0000014331 00000 п. 0000014850 00000 п. 0000015604 00000 п. 0000015784 00000 п. 0000015975 00000 п. 0000016165 00000 п. 0000018306 00000 п. 0000020252 00000 п. 0000022153 00000 п. 0000023611 00000 п. 0000024880 00000 п. 0000026017 00000 п. 0000026867 00000 п. 0000027561 00000 п. 0000038715 00000 п. 0000038927 00000 п. 0000038984 00000 п. 0000039092 00000 н. 0000039179 00000 п. 0000039312 00000 п. 0000039484 00000 п. 0000039586 00000 п. 0000039687 00000 п. 0000039864 00000 н. 0000039955 00000 н. 0000040088 00000 п. 0000040281 00000 п. 0000040372 00000 п. 0000040476 00000 п. 0000040653 00000 п. 0000040745 00000 п. 0000040874 00000 п. 0000041047 00000 п. 0000041159 00000 п. 0000041269 00000 п. 0000041442 00000 п. 0000041533 00000 п. 0000041687 00000 п. 0000041855 00000 п. 0000041947 00000 п. 0000042104 00000 п. 0000042259 00000 п. 0000042350 00000 п. 0000042454 00000 п. 0000042611 00000 п. 0000042701 00000 п. 0000042845 00000 п. 0000043014 00000 п. 0000043104 00000 п. 0000043216 00000 п. 0000043352 00000 п. 0000043498 00000 п. 0000043620 00000 н. 0000043788 00000 п. 0000043882 00000 п. 0000043979 00000 п. 0000044083 00000 п. 0000044182 00000 п. 0000044282 00000 п. 0000044381 00000 п. 0000044484 00000 п. 0000044636 00000 п. 0000044736 00000 п. 0000044850 00000 п. 0000044997 00000 п. 0000045119 00000 п. 0000045219 00000 п. 0000045319 00000 п. 0000045419 00000 п. 0000045530 00000 п. 0000045642 00000 п. 0000045734 00000 п. 0000045895 00000 п. 0000045999 00000 п. 0000046140 00000 п. 0000046296 00000 п. 0000046396 00000 п. 0000046539 00000 п. 0000046705 00000 п. 0000046827 00000 н. 0000046989 00000 п. 0000047101 00000 п. 0000047234 00000 п. 0000047348 00000 п. 0000047502 00000 п. 0000047593 00000 п. 0000047733 00000 п. 0000047880 00000 п. 0000047970 00000 п. 0000048085 00000 п. 0000048236 00000 п. 0000048394 00000 п. 0000048517 00000 п. 0000048612 00000 н. 0000048767 00000 п. 0000048861 00000 п. 0000048959 00000 н. 0000049104 00000 п. 0000049244 00000 п. 0000049341 00000 п. 0000049496 00000 п. 0000049592 00000 п. 0000049740 00000 п. 0000049836 00000 п. 0000049932 00000 н. 0000050040 00000 н. 0000050194 00000 п. 0000050348 00000 п. 0000050493 00000 п. 0000050646 00000 п. 0000050779 00000 п. 0000050946 00000 п. 0000051064 00000 п. 0000051179 00000 п. 0000051350 00000 п. 0000051494 00000 п. 0000051651 00000 п. 0000051808 00000 п. 0000051903 00000 п. 0000052058 00000 п. 0000052204 00000 п. 0000052343 00000 п. 0000052461 00000 п. 0000052622 00000 п. 0000052747 00000 п. 0000052872 00000 п. 0000053024 00000 п. 0000053212 00000 п. 0000053363 00000 п. 0000053515 00000 п. 0000053656 00000 п. 0000053797 00000 п. 0000053948 00000 н. 0000054041 00000 п. 0000054205 00000 п. 0000054352 00000 п. 0000054442 00000 п. 0000054592 00000 п. 0000054685 00000 п. 0000054845 00000 п. 0000054983 00000 п. 0000055126 00000 п. 0000055295 00000 п. 0000055388 00000 п. 0000055540 00000 п. 0000055633 00000 п. 0000055799 00000 п. 0000055913 00000 п. 0000056049 00000 п. 0000056171 00000 п. 0000056267 00000 п. 0000056422 00000 н. 0000056517 00000 п. 0000056614 00000 п. 0000056709 00000 п. 0000056837 00000 п. 0000056971 00000 п. 0000057127 00000 п. 0000057262 00000 п. 0000057370 00000 п. 0000057515 00000 п. 0000057658 00000 п. 0000057789 00000 п. 0000057903 00000 п. 0000058029 00000 п. 0000058157 00000 п. 0000058286 00000 п. 0000058441 00000 п. 0000058575 00000 п. 0000058683 00000 п. 0000058865 00000 п. 0000059009 00000 п. 0000059151 00000 п. 0000059295 00000 п. 0000059426 00000 п. 0000059541 00000 п. 0000059667 00000 п. 0000059796 00000 п. 0000059924 00000 н. 0000060043 00000 п. 0000060161 00000 п. 0000060281 00000 п. 0000060399 00000 п. 0000060501 00000 п. 0000060594 00000 п. 0000060789 00000 п. 0000060955 00000 п. 0000061084 00000 п. 0000061245 00000 п. 0000061388 00000 п. 0000061533 00000 п. 0000061707 00000 п. 0000061850 00000 п. 0000061997 00000 п. 0000062091 00000 п. 0000062187 00000 п. 0000062297 00000 п. 0000062391 00000 п. 0000062487 00000 п. 0000062596 00000 п. 0000062690 00000 н. 0000062786 00000 п. 0000062896 00000 п. 0000062992 00000 п. 0000063088 00000 п. 0000063198 00000 п. 0000063321 00000 п. 0000063438 00000 п. 0000063529 00000 п. 0000063620 00000 п. 0000063831 00000 п. 0000063974 00000 п. 0000064102 00000 п. 0000064263 00000 п. 0000064453 00000 п. 0000064561 00000 п. 0000064670 00000 п. 0000064826 00000 п. 0000064999 00000 н. 0000065139 00000 п. 0000065330 00000 п. 0000065437 00000 п. 0000065547 00000 п. 0000065720 00000 п. 0000065820 00000 п. 0000065975 00000 п. 0000066113 00000 п. 0000066256 00000 п. 0000066395 00000 п. 0000066520 00000 п. 0000066647 00000 п. 0000066750 00000 п. 0000066847 00000 п. 0000066942 00000 п. 0000067048 00000 п. 0000067159 00000 п. 0000067304 00000 п. 0000067404 00000 п. 0000067519 00000 п. 0000067642 00000 п. 0000067774 00000 п. 0000067911 00000 п. 0000068038 00000 п. трейлер ] >> startxref 0 %% EOF 685 0 obj> поток ~ rcW ڏ? G8 «XS} ξ @ ʷ4 + o8 / DS ֱ B ן zCYe ؞ / v 뛅 uV) \.
3 ключевых фактора, определяющих радиус действия Bluetooth
Универсальное решение, Bluetooth ® Технология позволяет разработчикам создавать беспроводные инновации, которые наилучшим образом соответствуют потребностям их целевого варианта использования. Хотя наиболее известные варианты использования Bluetooth, такие как потоковая передача звука и носимые устройства, созданы с учетом возможности подключения на небольшом расстоянии, это не связано с внутренним ограничением эффективного диапазона технологии.У Bluetooth есть гибкость, позволяющая быть точнее менее метра или надежно подключать устройства на расстоянии более километра друг от друга. При определении дальности и надежности сигнала на больших расстояниях необходимо учитывать несколько факторов.
Радиоспектр
Радиоспектр простирается от 30 Гц до 300 ГГц. Чем ниже частота, тем больше диапазон. Однако чем ниже частота, тем меньшую скорость передачи данных он может поддерживать. В результате выбор радиоспектра требует компромисса между диапазоном и скоростью передачи данных.
Bluetooth ® технология использует диапазон спектра ISM 2,4 ГГц (от 2400 до 2483,5 МГц), что обеспечивает хороший баланс между диапазоном и пропускной способностью. Кроме того, диапазон 2,4 ГГц доступен по всему миру, что делает его настоящим стандартом для беспроводной связи с низким энергопотреблением.
Мощность передачи
Думайте о мощности передачи как о громкости вашего голоса. Чем громче вы говорите, тем дальше вас кто-то может слышать, но тем больше энергии на это уходит.
Выбор уровня мощности передачи — это компромисс между дальностью передачи и потребляемой мощностью.Чем выше мощность передачи, тем больше вероятность, что сигнал будет слышен на больших расстояниях, и тем больше эффективный диапазон. Однако увеличение мощности передачи увеличивает энергопотребление вашего устройства.
Bluetooth ® Технология поддерживает мощность передачи от -20 дБм (0,01 мВт) до +20 дБм (100 мВт).
Чувствительность приемника
Bluetooth ® Технология определяет, что устройства должны обеспечивать минимальную чувствительность приемника от -70 дБм до -82 дБм, в зависимости от используемого физического уровня.Однако реализации Bluetooth обычно достигают гораздо более высоких уровней чувствительности приемника -95 дБмВт или выше.
Думайте о чувствительности приемника как о мере того, насколько хорошо вы слышите или насколько тихий звук, который вы слышите, понимают и . Чувствительность приемника — это мера минимального уровня сигнала, который приемник может интерпретировать. Другими словами, это самый низкий уровень мощности, при котором приемник может обнаруживать радиосигнал, поддерживать соединение и при этом демодулировать данные.
Прочие факторы
Узнайте больше о других факторах, таких как потери в тракте, усиление антенны и PHY, которые играют ключевую роль в определении эффективного диапазона решения Bluetooth.И посмотрите, как далеко может быть дальность действия Bluetooth ® для вас.
Radar Systems
Radar Systems Введение в Военно-морская техникаБазовые радиолокационные системы
Принцип действия
Радар — это аббревиатура
для радиообнаружения и определения дальности. Термин «радио»
относится к использованию электромагнитных волн с длинами волн в
так называемая радиоволновая часть спектра
, которая охватывает широкий диапазон от 10 4
км до 1 см.В радиолокационных системах
обычно используются длины волн порядка 10 см, что соответствует
частотам
порядка 3 ГГц. Обнаружение и ранжирование части аббревиатуры
выполняется посредством
отсчета времени задержки между передачей импульса радиоэнергии.
и его последующее возвращение
. Если время задержки Dt,
тогда диапазон можно определить по простой формуле
:
R = cDt / 2
, где c = 3 x 10 8 м / с, скорость света при которой
все электромагнитные волны распространяются.
Коэффициент двойки в формуле исходит из наблюдения, что
радиолокационный импульс должен пройти до цели и обратно на
до обнаружения, или в два раза больше дальности.
Последовательность импульсов радара
вид амплитудной модуляции частоты радара
несущая волна, подобно тому, как несущие волны модулируются при коммуникации
системы.
В данном случае информационный сигнал довольно простой:
одиночный импульс, повторяющийся через
регулярных интервалов. Общая модуляция несущей радара,
известная как последовательность импульсов
, показана ниже.Общие параметры радара, как определено
как показано на рисунке 1.
Фигура 2.
PW = ширина импульса. PW имеет единицы времени и обычно выражается в мс. PW — продолжительность пульса. RT = время отдыха. RT — интервал между импульсами. Измеряется в мс. PRT = импульс время повторения. PRT имеет единицы времени и обычно выражается в мс. PRT — это интервал между началом одного импульса и начало другого. PRT также равен сумме, PRT = PW + RT.PRF = частота повторения импульсов. PRF имеет единицы времени -1 и обычно выражается в Гц (1 Гц = 1 / с) или в импульсах на второй (ппс). PRF — это количество импульсов, передаваемых в секунду. и равен обратному PRT. RF = радиочастота. РФ имеет единиц времени -1 или Гц и обычно выражается в ГГц или МГц. RF — частота несущей волны, которая модулированы для формирования последовательности импульсов.
Механизация
Практическая радиолокационная система требует семи основных компонентов, как показано на рисунке.
ниже:
Рисунок 3
Преобразователь .Передатчик создает радиоволны для быть посланным и модулирует его, чтобы сформировать последовательность импульсов. Передатчик также должен усиливать сигнал до высокого уровня мощности, чтобы обеспечить адекватный диапазон. Источником несущей волны может быть клистрона, лампы бегущей волны (ЛБВ) или магнетрона. Каждый имеет свои особенности и ограничения.
2. Приемник . Приемник чувствителен к диапазон передаваемых частот и обеспечивает усиление возвращенного сигнала. Чтобы обеспечить максимальную диапазона, приемник должен быть очень чувствительным, не вводя чрезмерного шум.Возможность отличить принятый сигнал от фона шум зависит от отношения сигнал / шум (S / N).
Фоновый шум определяется средним значением, называемым шумовой эквивалентной мощностью (НЭП). Это напрямую приравнивает шум к обнаруженному уровню мощности. так что его можно сравнить с возвратом. Используя эти определения, критерий успешного обнаружения цели
П r > (S / N) НЭП,
где P r — мощность обратного сигнала.Поскольку это является важной величиной для определения характеристик радиолокационной системы, ему присвоено уникальное обозначение S min и называется Минимальный сигнал для обнаружения .
S мин = (S / N) NEP
Поскольку S мин , выраженное в ваттах, обычно является малым число, оказалось полезным определить эквивалент в децибелах, MDS, что означает Минимальный различимый сигнал .
MDS = 10 Log (S мин /1 мВт)
При использовании децибел количество в скобках логарифма должно быть числом без единиц.Я определение MDS, это число является долей S мин /1 мВт. Напоминаем, что мы используем специальное обозначение дБм для единиц измерения MDS, где «m» означает 1 мВт. Это сокращение для децибел относительно 1 мВт, что иногда записывается как дБ // 1 мВт.
В ресивере, С / Н устанавливает порог обнаружения, который определяет, что будет отображаться и чего не будет. Теоретически, если S / N = 1, то только возвращается с мощностью, равной или большей, чем фон будет отображаться шум.Однако шум является статистическим процесс и меняется случайным образом. НЭП просто средний значение шума. Бывают моменты, когда шум превышает порог, устанавливаемый приемником. Поскольку это будет отображаться и отображаться как законная цель, это называется ложной тревогой . Если SNR установлен слишком высоким, то будет несколько ложных срабатываний, но некоторые фактические цели могут не будет отображаться как промах). Если SNR установлен слишком низко, тогда будет много ложных срабатываний или высокий уровень ложных срабатываний скорость (FAR).
Некоторые приемники контролируют
фон и постоянно корректировать SNR для поддержания
постоянная частота ложных тревог, поэтому все они называются приемниками CFAR.
Какой-то общий приемник функции:
1.) Импульсная интеграция. Приемник принимает средняя обратная сила по многим импульсам. Случайные события подобный шум не возникает в каждом импульсе, и поэтому при усреднении будет иметь меньший эффект по сравнению с фактическими целями, которые будет в каждом пульсе.
2.) Контроль времени чувствительности (STC). Эта функция снижает влияние возвратов из состояния моря. Это уменьшает минимальный SNR приемника на короткое время сразу после передачи каждого импульса. Эффект настройки STC состоит в том, чтобы уменьшить беспорядок на дисплее непосредственно в регионе. вокруг передатчика. Чем больше значение STC, тем больше расстояние от передатчика, в котором беспорядок будет удален. Однако чрезмерное значение STC отключится. потенциал возвращается близко к передатчику.
3.) Быстрая постоянная времени (FTC). Эта функция разработана
чтобы уменьшить эффект длительной отдачи от
дождь. Эта обработка требует, чтобы сила отдачи
сигнал должен быстро меняться с течением времени. С дождя
возникает над и расширенной области, он будет производить долгую, устойчивую
возвращение. Обработка FTC
отфильтрует эти возвраты с дисплея. Только импульсы, которые
будут отображаться быстро подниматься и опускаться. В техническом
В терминах FTC является дифференциатором , что означает, что он определяет
скорость изменения сигнала, который затем используется для различения импульсов
которые не меняются быстро.
3. Источник питания . Блок питания обеспечивает
электрическая мощность для всех компонентов. Самый большой
Потребитель энергии — передатчик, которому может потребоваться несколько
кВт средней мощности. Фактическая мощность, передаваемая в
импульс может быть намного больше 1 кВт. Блок питания
только должен быть в состоянии обеспечить среднее количество энергии
потребляется, а не на высоком уровне мощности во время фактической передачи импульсов
. Энергия может храниться в конденсаторе
банк, например, во время отдыха.Сохраненный
энергия затем может быть помещена в импульс при передаче, увеличивая
пиковая мощность. Пиковая мощность и средняя мощность равны
связаны величиной, называемой рабочим циклом, постоянным током. Рабочий цикл
— доля каждого цикла передачи, которую радар
действительно передает. Что касается последовательности импульсов
На Рисунке 2 можно увидеть рабочий цикл:
DC = PW / PRF
Синхронизатор . Синхронизатор координирует время для определения диапазона.
Он регулирует скорость отправки импульсов (т.е. устанавливает PRF)
и сбрасывает синхронизирующие часы
для определения диапазона для каждого импульса. Сигналы от
синхронизатор отправляется
одновременно с передатчиком, который посылает новый импульс,
и на дисплей
, который сбрасывает обратную развертку.
Дуплексер . Это переключатель, который попеременно подключает
передатчик или приемник к антенне. Его цель — защитить
приемник от выхода высокой мощности передатчика. В течение
передача исходящего импульса, дуплексер будет выровнен
к передатчику на длительность импульса, ПВт.После
был отправлен, дуплексер настроит антенну на
приемник. Когда будет отправлен следующий импульс, дуплексер сместится
обратно к передатчику. Дуплексер не требуется, если передаваемый
мощность низкая.
Антенна . Антенна принимает радарный импульс от передатчика. и поднимает его в воздух. Кроме того, антенна должна фокусироваться энергия в четко определенный луч, который увеличивает мощность и позволяет определять направление цели.В антенна должна отслеживать свою ориентацию, что может быть выполнено синхронизатором. Также существуют антенные системы, которые не двигаются физически, а управляются электроникой (в этих случаях ориентация луча радара уже известна a априори ).
Ширина луча
антенны — это мера угловой протяженности
самых мощных порций излучаемой энергии. Для
В наших целях основная часть,
, называемая главным лепестком, будет находиться под всеми углами от перпендикуляра.
где мощность
составляет не менее 1/2 пиковой мощности или, в децибелах, -3
дБ.Ширина луча равна
диапазону углов в главном лепестке, определенном таким образом. Обычно
он преобразуется в
интересующую плоскость, такую как горизонтальная или вертикальная плоскость.
Антенна
будет иметь отдельную ширину луча по горизонтали и вертикали. Для
радиолокационная антенна, ширина луча
может быть предсказана по размеру антенны
в самолете
процентов по
д = л / л
где:
q — ширина луча в радианах,
l — длина волны
радара, а
L — размер антенны, в
направление интереса (т.е. ширина или высота).
В обсуждении
антенн связи, было заявлено, что ширина луча
для антенны может быть найдена с помощью q
= 2л / л. Так кажется
что антенны радара
имеют половину ширины луча в качестве средств связи
антенны. Отличие
в том, что антенны радара используются как для передачи, так и для приема
сигнал. Эффекты интерференции
от каждого направления объединяются, что имеет
эффект уменьшения
ширины луча. Поэтому при описании двусторонних систем
(как и радар)
подходит для уменьшения ширины луча в ½ дюйма
формула аппроксимации ширины пучка
.
направленный
Коэффициент усиления антенны — это мера того, насколько хорошо луч
сфокусирован во всех углах. Если бы мы были ограничены одним
плоскости, направленное усиление
будет просто отношением 2p / q.
Поскольку такая же мощность распределяется в меньшем диапазоне углов
, направленное усиление представляет собой
величина, на которую увеличивается мощность
в луче. В обоих углах, затем по направлению
прирост будет равен:
G dir = 4p / q f
поскольку есть 4p стерадианы, соответствующие
во всех направлениях (телесный угол, измеренный в
стерадиан, определяется как площадь фронта луча
делится на диапазон
в квадрате, поэтому ненаправленный луч будет покрывать область
из 4пр 2
на расстоянии R,
, следовательно, 4p стерадиан).
Здесь мы использовали:
q = ширина луча по горизонтали
(радианы)
f = ширина луча по вертикали (радианы)
Иногда направленное усиление измеряется в децибелах, а именно 10.
журнал (G dir ).
В качестве примера антенна с горизонтальной шириной луча
1,5 0 (0,025 радиана) и
вертикальная ширина луча 20 o (0,33 радиана)
будет иметь:
направленное усиление (дБ) = 10 log (4 p / 0,025 0,333) = 30,9 дБ
Пример: найти ширину луча по горизонтали и вертикали
радиолокационная система дальнего действия
AN / SPS-49 и усиление по направленности в дБ.Антенна
имеет ширину 7,3 м,
, высоту 4,3 м и работает на частоте 900 МГц.
Длина волны, l = c / f = 0,33 м.
Учитывая, что L = 7,3 м, тогда
q = l / L
= 0,33 / 7,3 = 0,045 радиан, или
q = 3 0 .
Высота антенны 4,3 м, поэтому аналогичная
расчет дает
f = 0,076 радиан
f = 4 0 .
Коэффициент направленности,
G dir = 4p / (0,045
0,076) = 3638.
Выражается в децибелах,
направленное усиление = 10 Log (3638)
= 35.6 дБ.
Дисплей . Блок дисплея может иметь различные формы, но в целом предназначена для представления полученной информации оператор. Самый простой тип отображения называется А-сканирование (амплитуда vs. задержка по времени). Вертикальная ось — сила отдачи. а по горизонтальной оси отложено время задержки или диапазон. А-скан не предоставляет информации о направлении цели.
Рисунок 4
Наиболее распространенным отображением является PPI (индикатор положения плана).Информация А-скана преобразуется в яркость и затем отображается. в том же относительном направлении, что и антенна. В результат — это вид сверху вниз на ситуацию, когда диапазон — это расстояние от начала координат. PPI, пожалуй, самый естественный дисплей для оператора и поэтому наиболее широко используемый. В В обоих случаях синхронизатор сбрасывает кривую для каждого импульса, поэтому что диапазон
информация начнется в источнике.
Рисунок 5.
В этом примере использование увеличенного STC для подавления моря беспорядок был бы полезен.
Производительность радара
Все
параметров базовой импульсной радиолокационной системы повлияет
производительность
каким-то образом. Здесь мы находим конкретные примеры
и количественно определить эту зависимость
, где это возможно.
Ширина импульса
Длительность импульса и длина цели по длине
радиальное направление
определяет длительность возвращенного импульса. В
в большинстве случаев длина возврата
обычно очень похожа на передаваемый импульс.в
На дисплее, импульс
(по времени) будет преобразован в импульс по расстоянию.
Диапазон значений
от передней кромки до задней кромки создаст некоторую неопределенность.
в диапазоне
к цели. Принятая за чистую монету способность
Диапазон точного измерения
определяется шириной импульса.
Если обозначить
погрешность в измеряемом диапазоне как разрешение диапазона,
R RES , то оно должно быть равно эквиваленту диапазона
ширины импульса, а именно:
R RES = c PW / 2
Теперь вы можете задаться вопросом, почему бы просто не взять передний край
импульс как диапазон
, который может быть определен с гораздо более высокой точностью?
Проблема в том, что
практически невозможно создать идеальную переднюю кромку.
На практике идеальный импульс
действительно будет выглядеть так:
Рисунок 6
Для создания идеально сформированного импульса с вертикальным передним фронтом потребуется бесконечная пропускная способность. Фактически вы можете приравнять полоса пропускания передатчика b до минимальной длительности импульса, PW по:
PW = 1 / 2b
Учитывая это понимание, вполне разумно сказать, что диапазон может быть определен не более точно, чем cPW / 2 или эквивалентно
R RES = c / 4b
Фактически, радар высокого разрешения часто называют широкополосным. радар, который вы теперь видите как эквивалентные утверждения.Один термин относится к временной области, а другой — к частотной области. Продолжительность импульса также влияет на минимальный диапазон, на котором радар может обнаружить. Исходящий импульс должен физически очистите антенну до обработки возврата. Поскольку это длится в течение интервала времени, равного ширине импульса PW, минимальной тогда отображаемый диапазон:
R МИН = c PW / 2
Эффект минимального диапазона можно увидеть на дисплее PPI как насыщенный
или пустая область
вокруг исходной точки.
Рисунок 7
Увеличение ширины импульса при сохранении остальных параметров то же самое повлияет на рабочий цикл и, следовательно, на средний мощность. Для многих систем желательно сохранить среднюю мощность исправлено. Тогда PRF должен быть изменен одновременно с PW в для того, чтобы продукт PW x PRF оставался неизменным. Например, если ширина импульса уменьшается в ½ раза, чтобы улучшить разрешение, то частота повторения импульсов обычно увеличивается вдвое.
Частота повторения импульсов (PRF)
Частота пульса
передача влияет на максимальный диапазон, который может отображаться
.Напомним, что синхронизатор сбрасывает отсчет времени.
тактовый сигнал при передаче каждого нового импульса
. Возвращения с далеких целей, которые не
достигнуть приемника до тех пор, пока
после отправки следующего импульса не будет отображаться правильно.
Поскольку таймер
часов был сброшен, они будут отображаться, как если бы диапазон, в котором
меньше фактического.
Если бы это было возможно, то учитывалась бы информация о диапазоне
двусмысленный.
Оператор не знает, соответствует ли диапазон фактическому диапазону.
или какое-то большее значение
.
Рисунок 8
Максимальный фактический диапазон, который может быть обнаружен и отображен без двусмысленность, или максимальный однозначный диапазон , это просто диапазон, соответствующий интервалу времени, равному повторению импульсов время, PRT. Следовательно, максимальный однозначный диапазон
R UNAMB = c PRT / 2 = c / (2PRF)
Когда радар сканирует,
необходимо контролировать скорость сканирования, чтобы в каждом конкретном случае было передано достаточное количество импульсов
.
направление в заказе
, чтобы гарантировать надежное обнаружение.Если используется слишком мало импульсов,
тогда будет более
трудно отличить ложные цели от реальных.
Ложные цели могут присутствовать
в одном или двух импульсах, но не в десяти или двадцати подряд.
Таким образом, чтобы
поддерживал низкую частоту ложных обнаружений, количество переданных импульсов
в каждом направлении
следует поддерживать высокий уровень, обычно выше десяти.
Для систем с высоким
частота повторения импульсов (частоты), луч радара
может быть перемещен быстрее и, следовательно, быстрее сканировать.
И наоборот, если частота повторения импульсов
понижена, необходимо уменьшить скорость сканирования. Для простого
сканирует,
легко определить количество импульсов, которые будут возвращены от любого конкретного
цель. Пусть
t представляет время задержки ,
это время, в течение которого цель остается в луче радара
во время каждого сканирования. Количество импульсов, N,
что цель будет подвергаться воздействию
во время пребывания:
N = t PRF
Мы можем переформулировать это уравнение, чтобы наложить требование на задержку время для конкретного сканирования
t мин = N мин / PRF
Таким образом, легко увидеть, что высокая частота повторения импульсов требует меньшее время ожидания.Например, для непрерывного кругового сканирования время пребывания связано со скоростью вращения и шириной луча.
т = д / Вт
где q = ширина луча [градусы] W = скорость вращения [градусы / сек] что даст время задержки в секундах. Эти отношения можно объединить, получив следующее уравнение, из которого максимальная скорость сканирования может быть определена для минимального количества импульсов за сканирование:
Вт МАКС = q PRF / N
Частота радара
Наконец, частота несущей радиоволны также будет иметь
некоторые
влияют на распространение луча радара.На низкой частоте
крайности, лучи радара
будут преломляться в атмосфере и могут попадать в «каналы»
что приводит к длинным диапазонам
. В крайнем случае луч радара будет вести себя
очень похож на видимый свет, а
движется по очень прямым линиям. Очень высокая частота
лучи радара будут нести высокие потери
и не подходят для систем большой дальности.
Частота будет
также влияют на ширину луча. Для антенны того же размера
: низкочастотный радар будет иметь большую ширину луча, чем высокочастотный.
частота одна.
Для того, чтобы ширина луча оставалась постоянной, низкочастотный радар
понадобится большая антенна
.
Теоретическое уравнение максимального диапазона
Приемник радара может обнаружить цель, если возврат достаточен.
сила.
Обозначим минимальный обратный сигнал, который может быть обнаружен
как S min , который должен иметь
единиц в ваттах, Вт.
а способность цели отражать радиолокационную энергию
можно обобщить в один термин, s,
известен как РЛС поперечного сечения, который имеет единицы
м 2 .Если абсолютно все происшествие
Энергия радара на цель была отражена
одинаково во всех направлениях, затем РЛС
Поперечное сечение будет равно площади поперечного сечения цели
, видимой передатчиком. На практике,
некоторая энергия поглощается
, и отраженная энергия не распределяется равномерно во всех направлениях.
Следовательно, поперечное сечение радара
довольно сложно оценить и обычно
определяется путем измерения
.
С учетом этих новых количеств
мы можем построить простую модель мощности радара
, которая возвращается в приемник:
P r = P t G 1 / 4pR 2 с 1 / 4pR 2 A e
Члены в этом уравнении сгруппированы, чтобы проиллюстрировать последовательность от передачи до коллекции.Вот последовательность подробнее:
G = r G реж.
Передатчик выдает пиковую мощность P t в антенну,
который фокусирует его в луч с усилением G. Прирост мощности аналогичен
к усилению по направлению, G dir , за исключением того, что он должен
также включают потери от передатчика к антенне. Эти
потери суммируются одним термином, обозначающим эффективность, r.
Следовательно,
Энергия радара распространяется равномерно во всех направлениях.В
поэтому мощность на единицу площади должна уменьшаться с увеличением площади.
Поскольку энергия распределена по поверхности сферы,
коэффициент 1 / 4pR 2 счетов
для уменьшения.
Энергия радара собирается поверхностью цели и
размышлял. Поперечное сечение радара s
учитывает оба этих процесса.
Отраженная энергия распространяется так же, как передаваемая энергия.
Приемная антенна собирает энергию, пропорциональную ее эффективная площадь, известная как апертура антенны, A e .Это также включает потери в процессе приема до тех пор, пока сигнал достигает приемника. Следовательно, индекс «e» означает «эффективный». Эффективная апертура связана с физической апертурой A, тем же термином, что и коэффициент полезного действия, используемым для увеличения мощности, учитывая символ р. Так что
А е = г А
Наш критерий обнаружения просто состоит в том, что полученная мощность,
P r должен на
превышать минимум, S min . Поскольку полученный
мощность уменьшается с увеличением дальности, максимальная дальность обнаружения
возникает, когда принимаемая мощность равна
минимум, т.е.е.
P r = S мин . Если вы решите диапазон,
вы получите уравнение для максимальной теоретической дальности действия радара
:
Возможно, самая важная особенность этого уравнения — корень четвертой степени зависимость. Практическое значение этого состоит в том, что необходимо значительно увеличьте выходную мощность, чтобы получить умеренное увеличение представление. Например, чтобы увеличить дальность вдвое, передаваемый мощность пришлось бы увеличить в 16 раз. Вы также должны отметить что минимальный уровень мощности для обнаружения, S min , зависит от по уровню шума.На практике это количество постоянно варьируется. для достижения идеального баланса между высокой чувствительностью который подвержен шуму и низкой чувствительности, которая может ограничивать способность радара обнаруживать цели. Пример: найти максимум дальность действия РЛС AN / SPS-49 с учетом следующих данных
Размер антенны = 7,3 м в ширину на 4,3 м в высоту
КПД = 80%
Пиковая мощность = 360 кВт
Поперечное сечение = 1 м 2
S мин = 1 10 -12 Вт
Мы знаем из предыдущего Например, направленная антенна усиление,
G dir = 4p / qf = 4p / (.
