Какие основные преимущества электродвигателей перед ДВС. Каковы недостатки электромоторов. Какие типы электродвигателей используются в электромобилях. Как устроены и работают разные виды электродвигателей. Какие производители выпускают электродвигатели для транспорта.
Основные преимущества электродвигателей перед ДВС
Электродвигатели имеют ряд существенных преимуществ по сравнению с двигателями внутреннего сгорания:
- Высокий КПД — до 90-95% против 22-60% у ДВС
- Отсутствие потерь на трение в трансмиссии
- Максимальный крутящий момент с начала движения
- Простота конструкции и управления
- Низкая стоимость обслуживания
- Экологичность — отсутствие вредных выбросов
- Низкий уровень шума
- Возможность рекуперации энергии при торможении
Благодаря этим преимуществам, электротранспорт в 3-4 раза эффективнее аналогичных машин с ДВС. Как это влияет на эксплуатационные характеристики? Электромобили обеспечивают более плавный ход, высокую динамику разгона, низкие затраты на обслуживание.

Типы электродвигателей, применяемых в электромобилях
В современных электромобилях используются следующие основные типы электродвигателей:
- Синхронные двигатели с постоянными магнитами (PMSM)
- Асинхронные двигатели переменного тока (ACIM)
- Бесщеточные двигатели постоянного тока (BLDC)
- Вентильные реактивные двигатели (SRM)
- Двигатели с внутренними постоянными магнитами (IPM)
Каждый тип имеет свои особенности конструкции и характеристики. Выбор конкретного типа двигателя зависит от требований к электромобилю по мощности, КПД, габаритам и стоимости.
Устройство и принцип работы асинхронного электродвигателя
Асинхронный двигатель переменного тока (ACIM) — один из наиболее распространенных типов электродвигателей в электромобилях. Как он устроен и работает?
Основные элементы асинхронного двигателя:
- Статор с обмотками
- Ротор типа «беличья клетка»
- Подшипниковые щиты
- Вал
- Корпус
Принцип работы основан на взаимодействии вращающегося магнитного поля статора с токами, индуцированными в роторе. При подаче переменного тока на обмотки статора создается вращающееся магнитное поле. Оно наводит ЭДС в роторе, из-за чего в нем возникают вихревые токи. Взаимодействие этих токов с магнитным полем статора создает вращающий момент.

Каковы преимущества асинхронных двигателей для электромобилей? Они просты по конструкции, надежны, имеют низкую стоимость. При этом обеспечивают хорошие показатели мощности и КПД.
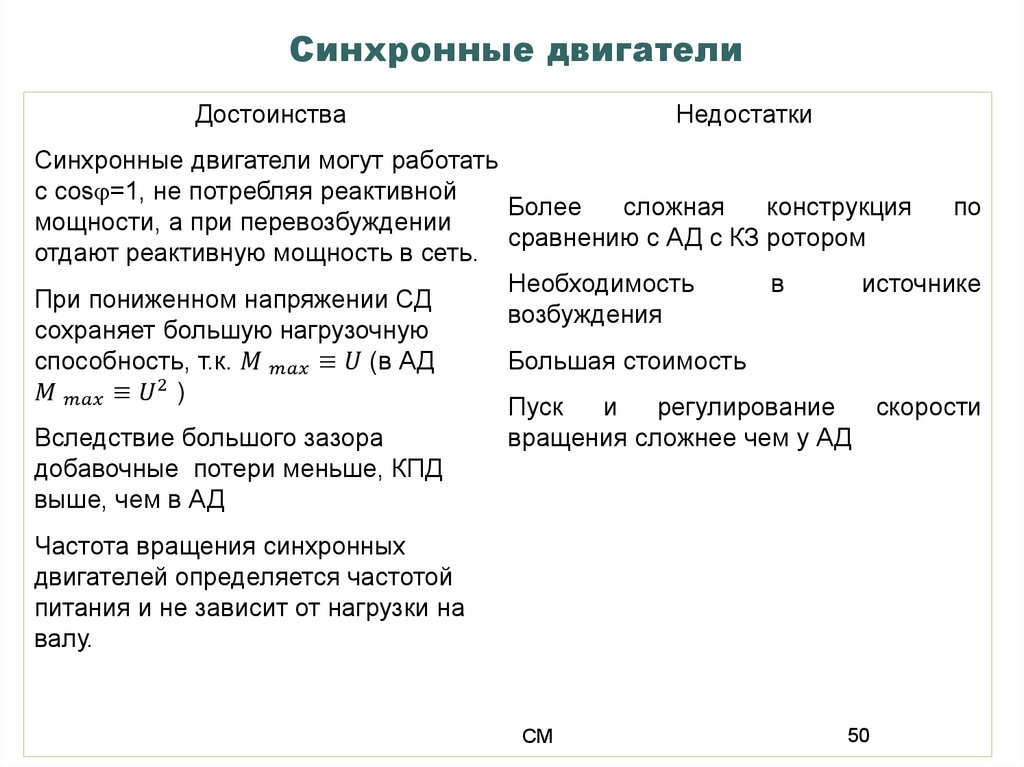
Синхронные двигатели с постоянными магнитами (PMSM)
Синхронные двигатели с постоянными магнитами (PMSM) — еще один популярный тип электродвигателей для электромобилей. Чем они отличаются от асинхронных моторов?
Особенности конструкции PMSM:
- Статор с обмотками, как у асинхронного двигателя
- Ротор с постоянными магнитами вместо «беличьей клетки»
- Датчик положения ротора
Принцип работы основан на взаимодействии вращающегося магнитного поля статора с постоянными магнитами ротора. Это обеспечивает синхронное вращение ротора с полем статора.
Какие преимущества дают PMSM для электромобилей? Они обладают высоким КПД, большой удельной мощностью, хорошими динамическими характеристиками. Недостатки — более сложная система управления и высокая стоимость магнитов.
Бесщеточные двигатели постоянного тока (BLDC)
Бесщеточные двигатели постоянного тока (BLDC) также находят применение в электромобилях. В чем их особенности?

Конструкция BLDC-двигателя:
- Статор с обмотками
- Ротор с постоянными магнитами
- Датчики положения ротора
- Электронный коммутатор
Принцип работы схож с PMSM, но коммутация обмоток осуществляется электронным способом на основе сигналов с датчиков положения. Это позволяет управлять двигателем как машиной постоянного тока.
Какие преимущества дают BLDC для электромобилей? Они обеспечивают высокий КПД, хорошие динамические характеристики, надежность из-за отсутствия щеточно-коллекторного узла. Недостаток — необходимость в сложной системе управления.
Вентильные реактивные двигатели (SRM)
Вентильные реактивные двигатели (SRM) — перспективный тип электродвигателей для электромобилей. Какова их конструкция и принцип работы?
Основные элементы SRM:
- Статор с явновыраженными полюсами и сосредоточенными обмотками
- Ротор с явновыраженными полюсами без обмоток и магнитов
- Датчик положения ротора
- Электронный коммутатор
Принцип работы основан на стремлении ротора занять положение с минимальным магнитным сопротивлением. При подаче тока на обмотки статора ротор поворачивается, стремясь совместить свои полюса с возбужденными полюсами статора.
Какие преимущества дают SRM для электромобилей? Они просты и надежны по конструкции, имеют низкую стоимость, обеспечивают широкий диапазон регулирования скорости. Недостатки — повышенный шум и пульсации момента.
Ведущие производители электродвигателей для электротранспорта
Производством электродвигателей для электромобилей и других видов электротранспорта занимаются многие компании. Кто является лидерами в этой области?
- Tesla — разрабатывает и производит собственные электродвигатели
- Siemens — поставляет двигатели многим автопроизводителям
- Bosch — производит электродвигатели и компоненты электропривода
- Nidec — крупнейший производитель электродвигателей в мире
- BorgWarner — поставщик электродвигателей для многих автокомпаний
Какие факторы определяют выбор производителя электродвигателей? Важны технические характеристики, надежность, стоимость, опыт компании в автомобильной отрасли. Многие автопроизводители стремятся разрабатывать двигатели самостоятельно, чтобы снизить зависимость от поставщиков.
ПРЕИМУЩЕСТВА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ ПЕРЕД ДВС
Мы живём в удивительное время! На наших глазах происходит революция! Слава богу, что революция техническая. Все мировые автопроизводители обьявили о разработках а некоторые уже выпускают серийно, средства транспорта с нулевым выбросом.Так называют транспорт с электрическим двигателем. См. статьи Электро будущее Чем-же он хорош?
- Преимущества электрического двигателя перед ДВС:
-
-ТЭД(тяговый электро двигатель) имеет КПД до 90-95% по сравнению с 22-60% у ДВС(двигатель внутреннего сгорания).
-
-Нет потери на трение в трансмиссии .
-
-Максимальный крутящий момент ТЭД развивает с начала движения, в момент пуска, поэтому ему не нужна коробка передач. Именно по этому у электрических машин фантастическая тяга. См. видео Возможности электрических машин
- -Меньшая стоимость эксплуатации и обслуживания.


- -Отсутствие вредных выхлопов.
- -Высокая экологичность ввиду отсутствия применения нефтяных топлив, антифризов, трансмиссионных и моторных масел.
- -Низкая пожаро- и взрывоопасность при аварии.
- -Простота конструкции (простота электродвигателя и трансмиссии, отсутствие необходимости в переключении передач) и управления, высокая надёжность и долговечность экипажной части (до 20—25 лет) в сравнении с обычным автомобилем.
- -Возможность подзарядки от бытовой электрической сети (розетки)
- -Меньший шум за счёт меньшего количества движимых частей и механических передач.
- -Высокая плавность хода с широким интервалом изменения частоты вращения вала двигателя.
- -Возможность подзарядки источников энергии во время рекуперативного торможения.
- -Возможность торможения самим электродвигателем (режим электромагнитного тормоза) без использования механических тормозов — отсутствие трения и соответственно износа тормозов.
- Суммируя всё выше перечисленное, можно посчитать что транспортное средство использующее электрический двигатель в 3-4 раза эффективнее анологичного ТС с двигателем внутреннего сгорания!
- Недостатки электрического двигателя перед ДВС:
- -Меньший пробег на одной заправке.
- -Более высокая стоимость (уменьшается с началом серийного производства)
- Но эти недостатки стремительно уменьшаются. И уже сегодня существуют серийные средства транспорта, обладающие всеми перечисленными преимуществами.
Предлагаем вашему вниманию Электрические квадроциклы для взраслых ( электроквадроциклы, электро-квадроциклы, е-атв, E-ATV). Это уже не фантастика-это реальность!
Купить которые можно уже сегодня!
Охотрикам и рыболовам, туристам и дачникам, средства передвижения будущего!
Электроквадроциклы различной мощности. Просто покататься, покататься быстро, покататься быстро и полазить по грязи. Минимальная грузоподъёмность 110 кг. Возможность модернизации: замена колёс, увеличение водо-грязенепроницаемости , увеличение пробега и т.д. Посмотрите на что способны Электрические квадроциклы: См. видео
Возможности электрических машин
Просто покататься, покататься быстро, покататься быстро и полазить по грязи. Минимальная грузоподъёмность 110 кг. Возможность модернизации: замена колёс, увеличение водо-грязенепроницаемости , увеличение пробега и т.д. Посмотрите на что способны Электрические квадроциклы: См. видео
Возможности электрических машин
Вы любите кататься, но у вас нет времени или желания заниматься обслуживанием. Заливать бензин, менять масло, фильтры, свечи, выставлять зажигание и т.д. Вам не хочется грохотать и дышать выхлопными газами. Вам не хочется думать заведётся, не заведётся. Вы просто хотите наслаждаться поездкой. Тогда Электрические квадроциклы это то что вам нужно!
Малошумные, мощные, быстрые, экологически чистые, экономичные. Минимальное обслуживание, сел аккумулятор, поставили на зарядку от обычной розетки и всё.
Электрические квадроциклы для взрослых и детей, представленные на сайте, обеспечиваются гарантийным и послегарантийным обслуживанием.
Для электрических квадроциклов представленных на сайте, не нужна регистрация и не нужны водительские удостоверения!
Прекрасный подарок охотникам и рыболовам, туристам и дачникам, женщинам и детям!
В любую погоду, летом и зимой сел и поехал!
| < Предыдущая | Следующая > |
|---|
16. Преимущества и недостатки электродвигателя
с последовательным возбуждением.
Преимущества:
1. Позволяют брать с места поезда большего веса, т.к. вращающий момент зависит не просто от тока нагрузки, а от тока в квадрате, величина которого при пуске большая.
2. Позволяют брать плавно поезда с места, т.к. при большой величине пускового тока частота вращения якоря небольшая.
3. Позволяет водить поезда без перегрузки
тяговых двигателей, т.к. при изменении
момента сопротивления одна величина
увеличивается, другая величина
уменьшается, а их произведение
остается почти неизменным.
Позволяет водить поезда без перегрузки
тяговых двигателей, т.к. при изменении
момента сопротивления одна величина
увеличивается, другая величина
уменьшается, а их произведение
остается почти неизменным.
(Мощность )
4. Не переходят автоматически в генераторный режим, что позволяет перед подъемом раньше включиться в режим тяги и вместе с запасенной кинетической энергией поезда легче преодолеть подъем.
5. Не происходит перегрузки двигателей, расположенных на колесных парах с большими диаметрами бандажей колесных пар (не требуется точного подбора колесных пар по их диаметру).
|
|
6. Колебания напряжения в контактной сети не вызывают резких толчков в поезде (не происходит большого броска тока нагрузки).
|
|
7. Обмотка возбуждения проще по
конструкции – для создания необходимого
магнитного потока при небольших токах
возбуждения, равным токам нагрузки,
требуется меньшее число витков обмотки
возбуждения; сечение «меди» обмотки
возбуждения больше и из-за малого
электрического сопротивления обмотки
возбуждения не требуется усиленной
межвитковой изоляции.
Обмотка возбуждения проще по
конструкции – для создания необходимого
магнитного потока при небольших токах
возбуждения, равным токам нагрузки,
требуется меньшее число витков обмотки
возбуждения; сечение «меди» обмотки
возбуждения больше и из-за малого
электрического сопротивления обмотки
возбуждения не требуется усиленной
межвитковой изоляции.
Недостатком электродвигателей с последовательным возбуждением является их склонность к боксованию (при резком уменьшении Мсопр частота вращения якоря резко возрастает), что объясняется мягкостью скоростной характеристики.
При подаче U на обмотки тягового
двигателя по его обмотках течет ток.
Образуется вращающий момент. Якорь
тягового двигателя вращается и через
зубчатую передачу вращающий момент
передается на колесную пару Мк.
Колесо колесной пары прижато к рельсу
с силой Р0. Вращающий момент
Мк можно заменить парой сил
F1 и F2. Сила
F1 приложена к центру колеса
О, а сила F2 – к ободу
колеса в точке А касания его с
рельсом. Рельс закреплен! Под действием
сил F2 и Р0
возникнут равные им и противоположно
направленные реакции со стороны рельса,
выраженные силами Fк и R,
которые являются внешними силами. Сила
R направлена вертикально и не влияет
характер движения. Сила реакции
рельса Fк
и является силой тяги. За счет
сцепления колеса с рельсом возникает
необходимый упор. При этом силы F2
и Fк уравновешиваются. Под
действием силы F1 колеса
поворачиваются относительно точки А,
как мгновенного центра вращения. Так
как мгновенный центр вращения при этом
перемещается по поверхности головки
рельса слева направо, то и центр колеса
(точка О) поступательно движется в
том же направлении.
Сила
F1 приложена к центру колеса
О, а сила F2 – к ободу
колеса в точке А касания его с
рельсом. Рельс закреплен! Под действием
сил F2 и Р0
возникнут равные им и противоположно
направленные реакции со стороны рельса,
выраженные силами Fк и R,
которые являются внешними силами. Сила
R направлена вертикально и не влияет
характер движения. Сила реакции
рельса Fк
и является силой тяги. За счет
сцепления колеса с рельсом возникает
необходимый упор. При этом силы F2
и Fк уравновешиваются. Под
действием силы F1 колеса
поворачиваются относительно точки А,
как мгновенного центра вращения. Так
как мгновенный центр вращения при этом
перемещается по поверхности головки
рельса слева направо, то и центр колеса
(точка О) поступательно движется в
том же направлении.
Сумма сил Fк всех движущих колесных пар локомотива называется силой тяги локомотива.
Сила тяги Fк не должна превышать силу сцепления колеса с рельсом. тягового двигателя. Fк ≤Fк сцеп. В противном случае колесо теряет упор и начнется проскальзывание — боксование. Сила сцепления определяется произведением силы Р0 на коэффициент сцепления колеса с рельсом – Fсцеп = P0 x ψ.
Для локомотива Fсцеп = mл x g x ψ, где mл — масса локомотива, g – 9,81 м/с2 – ускорение свободного падения, ψ – коэффициент сцепления.
Коэффициент сцепления
зависит от материала рельса и колес,
состояния их поверхностей, от скорости
движения.
Расчетный коэффициент сцепления локомотива ψк определяют по эмпирическим формулам для различных типов локомотивов и отдельно в кривых малого радиуса R менее 500 м, например для электровозов переменного тока:
Природу силы сцепления часто объясняют наличием шероховатостей на поверхностях колеса и рельса. При таком рассуждении можно считать, что при наличии отшлифованных поверхностей сила сцепления меньше. Однако практика доказывает, что при чистых и хорошо обработанных поверхностях сила сцепления выше. Сцепление колес с рельсами объясняется молекулярным сцеплением. Для увеличения сцепления колес с рельсами используют сухой кварцевый песок, который разрушает поверхностные пленки и твердые частицы внедряются в контактируемые поверхности.
Под каждое колесо электровоза нужно подавать песок 400-700 г/мин летом и 900-1500 г/мин зимой.
Склонность колесных пар к боксованию
возрастает с увеличением проката
бандажей свыше 3÷4 мм и износа рельсов
вследствие изменения формы и размеров
площадки, по которой соприкасаются
колесо и рельс.
Вращающий момент, действующий на колесо Мк = М х μ x ηn, где М – вращающий момент на валу якоря тягового двигателя, μ — передаточное отношение зубчатой передачи, которое определяется отношением числа зубьев зубчатого колеса к числу зубьев шестерни μ= Zk / Zш , ηn – К.П.Д. зубчатой передачи и моторно-осевых подшипников, который принимается равным 0,975.
Сила F1 действует на буксу и по III закону Ньютона букса на колесо действует с силой F3. Пара сил F3 и Fк определяют момент. Для условия равновесия колеса Fк х Dк / 2 = Мк, отсюда Fк = 2 Мк / Dк, или
Мощность электродвигателя Pдв = Uдв х Iн х ηn, а так же Pдв = Fк х V (H х км/ч), переводим км/ч в м/с — 1000/(60х60) = 1/3,6
Pдв = Fк х V / 3,6, отсюда ;
Сила тяги электровоза:
,
где N – число двигателей электровоза.
Преимущества и недостатки различных типов двигателей электромобилей | на электромобилях
в: EVs special
Сегодня электромобили — это точно не новая тема, она самая популярная и можно сказать модное слово. Поскольку электромобили становятся благом в стране, людям очень интересно узнать больше об электромобилях, покупают ли они их для себя или нет, но они ищут некоторые замечательные характеристики для наилучших характеристик автомобиля, такие как скорость, запас хода, мощность или мощность двигателя и т. д., поэтому у нас есть некоторые преимущества и недостатки различных типов двигателей электромобилей.
Прежде чем мы перейдем к производителям двигателей, давайте посмотрим, какие типы двигателей используются в электромобилях и какие двигатели широко используются в электромобилях.
Существует много типов двигателей, но из них широко используются 5 различных типов двигателей, и в настоящее время большинство производителей электромобилей используют двигатели BLDC, асинхронные, SRM, двигатели с постоянными магнитами.
Различные типы двигателей электромобилей
- Синхронный двигатель с постоянными магнитами (PMSM),
- Бесщеточный двигатель постоянного тока (BLDCM),
- Асинхронный двигатель переменного тока (ACIM),
- Реактивный двигатель с переключаемым постоянным магнитом (PMSRM)
- Внутренний двигатель с постоянными магнитами (IPMM),
Связанная статья: Двигатели широко используются
Типы электродвигателей
Электродвигатели доступны в 3 основных сегментах, таких как двигатель переменного тока, двигатель постоянного тока и двигатели специального назначения.
Двигатели постоянного и переменного тока
Двигатели постоянного тока могут работать от 96 до 192 вольт и двигатель переменного тока, трехфазный двигатель переменного тока, работающий от 240 вольт переменного тока с аккумуляторной батареей на 300 вольт. Типичный двигатель будет иметь мощность от 20 000 до 30 000 Вт.
Типичный двигатель будет иметь мощность от 20 000 до 30 000 Вт.
Преимущество
- Обеспечивает максимальный крутящий момент на низкой скорости.
Недостатки
- Громоздкая конструкция
- Низкий КПД
- Тепловыделение на щетках
Применение
Используется в Fiat Panda Elettra.
Advantages
- No rooter copper less
- More efficiency than the induction motors
- It is lighter
- Smaller
- Better heat dissipation
- More reliable
Disadvantages
- Short constant power range
- При увеличении скорости крутящий момент уменьшается
- Дорого
Использование
Этот тип двигателя используется в Toyota Prius (2005 г.).
Преимущества
- можно использовать без использования систем передачи в различных скоростях
- Более эффективно
- Compact
- .
 Лучшие подходящие для применения в колесе
Лучшие подходящие для применения в колесе - .
- При работе в колесе на высокой скорости теряет большое количество железа
Применение
Toyota Prius, Nissan Leaf, Soul EV
Преимущества
- Это наиболее совершенная система привода без коллекторного двигателя
Применение
Tesla Model S, Tesla Model X, Toyota RAV4, GM EV1
Преимущества
- Простота
- Прочная конструкция
- High speed
- Low cost
- Constant long power range
- Fault-tolerant
- Higher power density
Disadvantages
- Makes so much of noise
- Low efficiency
- Larger
- Heavy
- Комплексный и проектный контроль
- Создание проблем в производстве и управляемость
- Низкая мощность
Применение
Chloride Lucas
- More power than SynRms
- Free from demagnetizing problems seen in IPM
Usage
BMWi3
Advantages
- Iron is not used in the outer rotor
- No stator core
- Weightless
- Повышенная удельная мощность
- Минимальные потери в меди
- Высокая эффективность
- Машины с регулируемой скоростью
- Ротор может фильтроваться на боковой стороне колеса
Использование
Renovo Coupe
Преимущества и недостатки (электродвигатель)
9,7
. Преимущества Drives SRM Sablies Sablection Sablection Sablies Sablies Sablies — 9001 2
Преимущества Drives SRM Sablies Sablection Sablection Sablies Sablies Sablies — 9001 2 2. • Sablies Sablies Sablies — 9002
2. • Sably Sablies Sablections. обмотка или постоянный магнит на роторе.
РИСУНОК 9.44 Эквивалентная схема при включенном S1.
РИСУНОК 9.45 Эквивалентная схема при выключенном S1.
РИСУНОК 9.46 Драйвер SRM с преобразователем C-dump.
• Снижены потери ротора за счет отсутствия обмотки ротора. Поэтому машина подходит для низковольтных и токоемких применений.
• Эффективное охлаждение может быть достигнуто, так как основные потери происходят на статоре, к которому легко получить доступ.
• Так как размер ротора мал, он имеет меньший момент инерции, что обеспечивает большой коэффициент ускорения двигателя.
• Роторы простые; следовательно, они механически прочны и, следовательно, естественным образом подходят для работы на высоких скоростях.
• Конфигурация концентрированной обмотки снижает общую стоимость по сравнению с распределенной обмоткой. Эта конфигурация также уменьшает накопление на конце витка, что сводит к минимуму неактивную часть материалов, что приводит к более низкому сопротивлению и потерям в меди по сравнению с распределенными обмотками в других машинах.
РИСУНОК 9.47 Фазная индуктивность, напряжение и ток для преобразователя C-dump.
• Так как это бесщеточные машины, их обслуживание не требует больших затрат.
• SRM не создают зубчатый или ползучий крутящий момент; следовательно, перекос не требуется.
• Поскольку обмотки электрически отделены друг от друга, они имеют пренебрежимо малую взаимную связь; следовательно, отказ одного не влияет на другой.
• SRM показывают высокую надежность по сравнению с другими машинами, так как имеется свобода выбора количества
РИСУНОК 9.48 Эквивалентная схема, когда S1 включен, а другие переключатели и диоды выключены.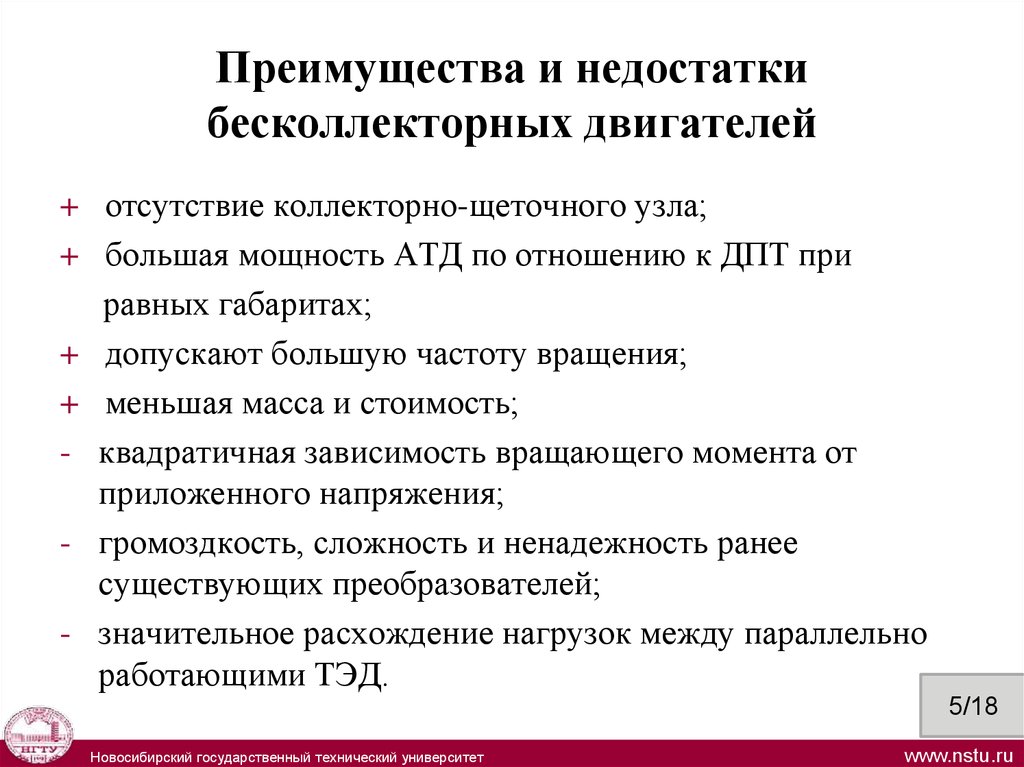
РИСУНОК 9.49 Эквивалентная схема, когда S1 и S4 выключены, а D1 включен.
РИСУНОК 9.50 Эквивалентная схема, когда все переключатели и диоды выключены.
РИСУНОК 9.51 Эквивалентная схема, когда S1 и S4 включены, а D1 и D4 выключены.
РИСУНОК 9.52 Эквивалентная схема, когда D1 и S4 включены, а S1 и D4 выключены.
фазы. По мере увеличения количества фаз повышается и надежность машины.
• Имеют встроенную регулировку скорости.
• Они обеспечивают широкий диапазон рабочих скоростей.
• SRM обеспечивают большую гибкость управления.
• Поскольку силовые выключатели включены последовательно с фазными обмотками и вместе они параллельны источнику постоянного напряжения, вероятность сквозного замыкания исключена; следовательно, может быть достигнута более высокая надежность.
• Их механическая структура не такая жесткая, как, скажем, у синхронных машин, и в сочетании с гибкой системой управления эти машины способны эффективно поглощать переходные процессы, что обеспечивает отказоустойчивость механической системы.
• Работа при постоянной мощности с увеличенной скоростью.
РИСУНОК 9.53 Драйвер SRM со свободным преобразователем C-dump.
Недостатки приводов SRM суммированы следующим образом:• Высокие пульсации крутящего момента являются основным недостатком этой машины, но контроль перекрывающихся токов может их уменьшить.
• Издают высокий акустический шум.
• Радиальные силы минимальны в невыровненных положениях и высоки в выровненных положениях; следовательно, любое отклонение более половины шага ротора может способствовать более быстрому износу подшипников при наличии эксцентриситета ротора и неравномерных воздушных зазоров, что является основным источником шума.
• Высокие потери на трение и сопротивление воздуха из-за выступающего ротора.
• В нем отсутствует возможность запуска от сети, так как для работы машины требуется электронный преобразователь мощности.
• Для управления SRM требуется информация о местоположении; однако можно использовать бессенсорные методы, чтобы избежать датчиков положения.
РИСУНОК 9.54 Фазная индуктивность, напряжение и ток для преобразователя C-dump.
• Во всех топологиях преобразователя SRM необходим отдельный шунтирующий диод для каждого переключателя, что увеличивает общую стоимость по сравнению с инверторами H-bridge. Диски
SRM имеют множество применений. К маломощным приложениям относятся приводы плоттеров, приводы двигателей пневматических установок, приводы двигателей ручных вилочных погрузчиков/тележек с поддонами, системы привода дверей, кондиционеры и бытовая техника, такая как стиральные машины, сушилки и пылесосы. К приложениям средней мощности относятся промышленные приводы общего назначения, приводы кондиционеров поездов и приводы горнодобывающей промышленности. Мощный
РИСУНОК 9.55 Драйвер SRM с раздельным преобразователем постоянного тока Применение
включает электрические силовые установки, автомобильные системы, бытовые устройства, такие как вентиляторы и насосы, а также промышленные приводы с регулируемой скоростью.