Как работают спутниковые навигационные системы. Какие режимы измерений используются в GNSS. Чем отличаются кодовые и фазовые измерения. Какая точность позиционирования достигается в разных режимах.
Принципы работы спутниковых навигационных систем
Спутниковые навигационные системы, такие как GPS, ГЛОНАСС и Galileo, основаны на измерении времени прохождения сигнала от спутников до приемника. Зная скорость распространения радиоволн, можно вычислить расстояние до спутников, а затем определить координаты приемника методом трилатерации.
Основные компоненты спутниковой навигационной системы:
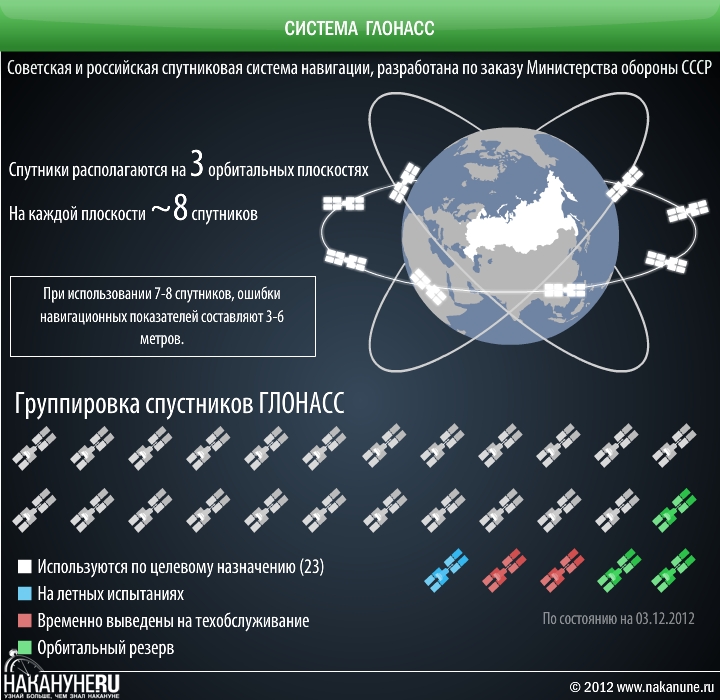
- Космический сегмент — группировка навигационных спутников на орбите
- Наземный сегмент управления — станции слежения и управления спутниками
- Пользовательский сегмент — приемники сигналов GNSS
Для определения трехмерных координат приемника необходимо одновременно принимать сигналы как минимум от 4 спутников. Это позволяет решить систему уравнений и найти координаты X, Y, Z, а также поправку часов приемника.
Основные режимы измерений в спутниковой навигации
В спутниковых навигационных системах используются следующие основные режимы измерений:
- Кодовые измерения
- Фазовые измерения
- Доплеровские измерения
Каждый из этих режимов имеет свои особенности и обеспечивает разную точность позиционирования. Рассмотрим их подробнее.
Кодовые измерения
Кодовые измерения основаны на определении времени прохождения псевдослучайного кода от спутника до приемника. Это позволяет вычислить псевдодальность — расстояние, искаженное рассинхронизацией часов спутника и приемника.
Особенности кодовых измерений:
- Точность порядка нескольких метров
- Не требуют сложной обработки
- Позволяют быстро определить приблизительные координаты
- Используются во всех навигационных приемниках
Кодовые измерения достаточны для большинства навигационных задач, но не обеспечивают высокую точность, необходимую для геодезии.
Фазовые измерения
Фазовые измерения основаны на определении разности фаз несущего колебания, принятого от спутника, и опорного колебания приемника. Это позволяет измерить дальность с точностью до долей длины волны.

Ключевые особенности фазовых измерений:
- Высокая точность — до нескольких миллиметров
- Требуют разрешения неоднозначности фазовых циклов
- Используются в геодезических приемниках
- Позволяют определять разности координат (базовые линии) с высокой точностью
Фазовые измерения обеспечивают наивысшую точность, но требуют более сложной обработки по сравнению с кодовыми.
Доплеровские измерения
Доплеровские измерения основаны на определении смещения частоты сигнала из-за взаимного движения спутника и приемника. Это позволяет измерить радиальную скорость спутника относительно приемника.
Особенности доплеровских измерений:
- Позволяют определять скорость движения приемника
- Дают дополнительную информацию о положении приемника
- «Бесплатны» — получаются попутно с фазовыми измерениями
- Использовались в первых спутниковых навигационных системах
Доплеровские измерения дополняют кодовые и фазовые, повышая точность и надежность навигационного решения.
Точность позиционирования в разных режимах измерений
Точность определения координат в спутниковой навигации зависит от используемого режима измерений и метода обработки данных. Рассмотрим типичные значения точности для основных режимов:
- Кодовые измерения в автономном режиме: 5-10 метров
- Кодовые измерения с дифференциальными поправками: 0.5-2 метра
- Фазовые измерения в статическом режиме: 3-5 мм + 1 мм/км
- Фазовые измерения в кинематическом режиме: 1-2 см + 1 мм/км
На точность позиционирования влияют следующие факторы:
- Количество и геометрия наблюдаемых спутников
- Уровень многолучевости сигналов
- Состояние ионосферы и тропосферы
- Качество эфемерид и часов спутников
- Аппаратурные задержки в приемнике
Для достижения высокой точности важно учитывать и минимизировать влияние этих факторов при планировании и проведении измерений.
Дифференциальные методы повышения точности
Для повышения точности позиционирования широко применяются дифференциальные методы. Они основаны на использовании поправок, вычисляемых на базовой станции с известными координатами.
Основные виды дифференциальных методов:
- DGPS — дифференциальная GPS на основе кодовых измерений
- RTK — кинематика реального времени на основе фазовых измерений
- PPP — точное абсолютное позиционирование с использованием высокоточных эфемерид и поправок часов спутников
Дифференциальные методы позволяют значительно повысить точность позиционирования, компенсируя многие источники ошибок. Например, метод RTK обеспечивает сантиметровую точность в реальном времени.
Перспективы развития спутниковой навигации
Спутниковые навигационные системы продолжают активно развиваться. Основные направления развития:
- Увеличение количества навигационных спутников и орбитальных группировок
- Повышение мощности и помехозащищенности сигналов
- Внедрение новых частот и сигналов
- Совершенствование методов обработки измерений
- Интеграция GNSS с инерциальными и другими датчиками
Это позволит повысить точность, надежность и доступность спутниковой навигации, расширить сферы ее применения.
Заключение
Спутниковые навигационные системы стали неотъемлемой частью современных технологий позиционирования и навигации. Понимание принципов их работы, особенностей различных режимов измерений и методов повышения точности позволяет эффективно применять GNSS в широком спектре задач — от бытовой навигации до высокоточных геодезических измерений.Программы обмена | Официальный сайт Триколора
Принимаемое к обмену оборудование
По программе обмена клиент получает двухтюнерный UHD-приёмник модели GS B527 / GS B621L или однотюнерный UHD-приемник GS B5210.
Для подключения в комплект включен шнур HDMI-HDMI длиной 1,5 метров. В случае, если телевизионный приемник пользователя не оснащен гнездом HDMI, возможно подключение приемника с помощью кабелей другого типа (приобретаются отдельно, в комплект поставки не включены).
Для использования дополнительных возможностей подключите к приёмнику жёсткий диск c объёмом памяти от 64 Гб. Для доступа к онлайн-сервисам требуется доступ в интернет (обеспечивается клиентом самостоятельно).
Посмотреть правила акции «Обмен с доставкой» (действует до 31.12.2021 г.)
ВНИМАНИЕ!
Перед оформлением заказа на обмен оборудования в рамках настоящей Акции убедительно просим проверить актуальность ваших данных, которые были указаны при заключении Абонентского договора с НАО «Национальная спутниковая компания». Проверить данные можно в Личном кабинете клиента, в разделе «Регистрационная информация». В случае, если с момента заключения Абонентского договора данные изменились, вам необходимо их актуализировать в Личном кабинете или на сайте tricolor.tv в разделах «Помощь» или «Служба поддержки клиентов». Организатор вправе отказать в участии в Акции, если данные, указанные в Абонентском договоре, не совпадают с данными, которые клиент сообщает Службе поддержки клиентов Триколора при подтверждении заказа.
Проверить данные можно в Личном кабинете клиента, в разделе «Регистрационная информация». В случае, если с момента заключения Абонентского договора данные изменились, вам необходимо их актуализировать в Личном кабинете или на сайте tricolor.tv в разделах «Помощь» или «Служба поддержки клиентов». Организатор вправе отказать в участии в Акции, если данные, указанные в Абонентском договоре, не совпадают с данными, которые клиент сообщает Службе поддержки клиентов Триколора при подтверждении заказа.
С 01.02.2017 г. для клиентов, абонентская линия которых сформирована по тарифу «Единый МультиОбмен Лайт 50 БК», включены 7 дней просмотра пакета каналов «Единый» и дополнительных пакетов: «Ultra», «Детский» и «Ночной».
С 13.05.2020 г. для клиентов, чья абонентская линия сформирована по тарифу «Обмен Единый Ultra 7 дней 60 БК», включены 7 дней просмотра пакета каналов «Единый Ultra» и дополнительных пакетов: «Детский», «Ночной».
Доступ к услугам «Детский», «Ночной», «Ultra» необходимо активировать в Личном кабинете в течение 31 суток после активации карты. Доступ к активации услуг «Детский», «Ночной», «Ultra» в Личном кабинете будет предоставлен в течение суток после активации карты.
Доступ к активации услуг «Детский», «Ночной», «Ultra» в Личном кабинете будет предоставлен в течение суток после активации карты.
Ultra HD (англ.) — телевидение сверхвысокой чёткости. Просмотр в формате Ultra HD доступен клиентам, чьё приёмное оборудование способно распознавать формат Ultra HD, а телевизор имеет возможность транслировать телеканалы в указанном формате.
HD, Full HD (англ.) — телевидение высокой четкости.
* Владельцам данных моделей приемников в рамках Акции доступно только предложение обмена на комплект с двухтюнерным приемником GS B527.
Продавец оборудования: ООО «Торговые технологии», ОГРН: 1167847459878, адрес: 197101, г. Санкт-Петербург, ул. Большая Монетная, д. 16, корп. 1, лит. 5-Н, помещение 411.
Использование приемника с высокой точностью—ArcGIS Survey123
GNSS приемник с высокой точностью может использоваться в любом опросе без предварительной настройки, но обычно сначала задаются некоторые правила сбора метаданных и точности. Дополнительные сведения см. в разделе Подготовка к сбору данных с высокой точностью.
Дополнительные сведения см. в разделе Подготовка к сбору данных с высокой точностью.
Выполните следующие шаги, чтобы использовать приемник с высокой точностью в полевом приложении Survey123:
Выбор приёмника
Survey123 может использовать как встроенный приемник GPS, так и внешний, для получения данных высокой точности. На рынке доступно множество приемников GPS, однако не все они могут работать непосредственно с Survey123. Чтобы использовать приемник GPS в Survey123, он должен поддерживать выходные выражения NMEA.
Для повышения точности позиционирования можно воспользоваться приемником GPS, поддерживающим дифференциальную коррекцию. Если используется устройство с iOS, необходимо также использовать один из приемников GPS, поддерживаемых iOS. Хотя список поддерживаемых GPS-приемников для Android или Windows Esri не публикуется, доступен список приемников, использованных в тестировании на Android и Windows.
Подсказка:
Большинство высокоточных GPS-приемников поддерживают сообщения NMEA, которые используются в Survey123; однако рекомендуется проверить в руководстве пользователя, поддерживает ли ваш приемник передачу сообщений NMEA, перед тем как подключать его к Survey123.
Поддержка NMEA
NMEA 0183 – это стандарт данных, которые используются в Survey123 для получения информации от приемников GPS. Сообщения NMEA передаются в виде строк данных, которые называются выражениями. Survey123 извлекает GPS-информацию, такую как широта, долгота, высота и тип фиксации, считывая определенные выражения в сообщениях NMEA.
Survey123 поддерживает NMEA версий 4.00 и 4.10. Он может читать следующие выражения NMEA:
- GGA: данные, связанные с временем, положением и фиксацией
- GSA: GNSS DOP и активные спутники
- GSV: спутники GNSS в зоне видимости
- RMC: рекомендованные минимальные специфичные данные GNSS
- VTG: курс по поверхности земли и скорость относительно поверхности земли
- GST: GNSS статистика ошибки псевдодальности
Если Survey123 принимает выражения GST, которые содержат информацию о точности для отдельной координаты, он использует их для определения точности. По умолчанию значения горизонтальной и вертикальной точности указываются как среднеквадратичные значения (RMS). Уровень достоверности при использовании среднеквадратичного значения составляет от 63 до 68 процентов для горизонтальной точности и 68 процентов для вертикальной точности.
По умолчанию значения горизонтальной и вертикальной точности указываются как среднеквадратичные значения (RMS). Уровень достоверности при использовании среднеквадратичного значения составляет от 63 до 68 процентов для горизонтальной точности и 68 процентов для вертикальной точности.
Если вам нужно получить интервал 95-процентной достоверности для горизонтально и вертикальной точности, вы можете вычислить ее при сборе данных, умножив текущую точность на коэффициент конвертации. Дополнительные сведения см. в Сообщать об интервале 95-процентной достоверности.
Ориентировочная точность
Если Survey123 не получает от приемника выражения GST, но получает выражение GSA, Survey123 оценивает точность с помощью погрешности по горизонтали (HDOP) и погрешности по вертикали (VDOP). Оценка точности по горизонтали вычисляется умножением HDOP на 4.7, оценка точности по вертикали – умножением VDOP на 4.7.
Дифференциальная коррекция
Для повышения точности позиционирования можно воспользоваться приемником GPS, поддерживающим дифференциальную коррекцию. Технология дифференциальной коррекции еще больше повышает точность с помощью опорных станций, которые также называются базовыми станциями. Опорная станция представляет собой GPS-приемник, установленный на известной позиции. Опорная станция определяет свое положение по спутниковым сигналам и сравнивает его с известным положением. Разница между этими положениями применяется к позиции, вычисленной GPS-приемником пользователя, также называемым рабочим приемником, что позволяет получить более точное позиционирование. Для выполнения дифференциальной коррекции приемник пользователя должен находиться на определенном расстоянии от опорной станции. Дифференциальная коррекция может применяться в реальном времени в поле или при последующей обработке данных в офисе.
Технология дифференциальной коррекции еще больше повышает точность с помощью опорных станций, которые также называются базовыми станциями. Опорная станция представляет собой GPS-приемник, установленный на известной позиции. Опорная станция определяет свое положение по спутниковым сигналам и сравнивает его с известным положением. Разница между этими положениями применяется к позиции, вычисленной GPS-приемником пользователя, также называемым рабочим приемником, что позволяет получить более точное позиционирование. Для выполнения дифференциальной коррекции приемник пользователя должен находиться на определенном расстоянии от опорной станции. Дифференциальная коррекция может применяться в реальном времени в поле или при последующей обработке данных в офисе.
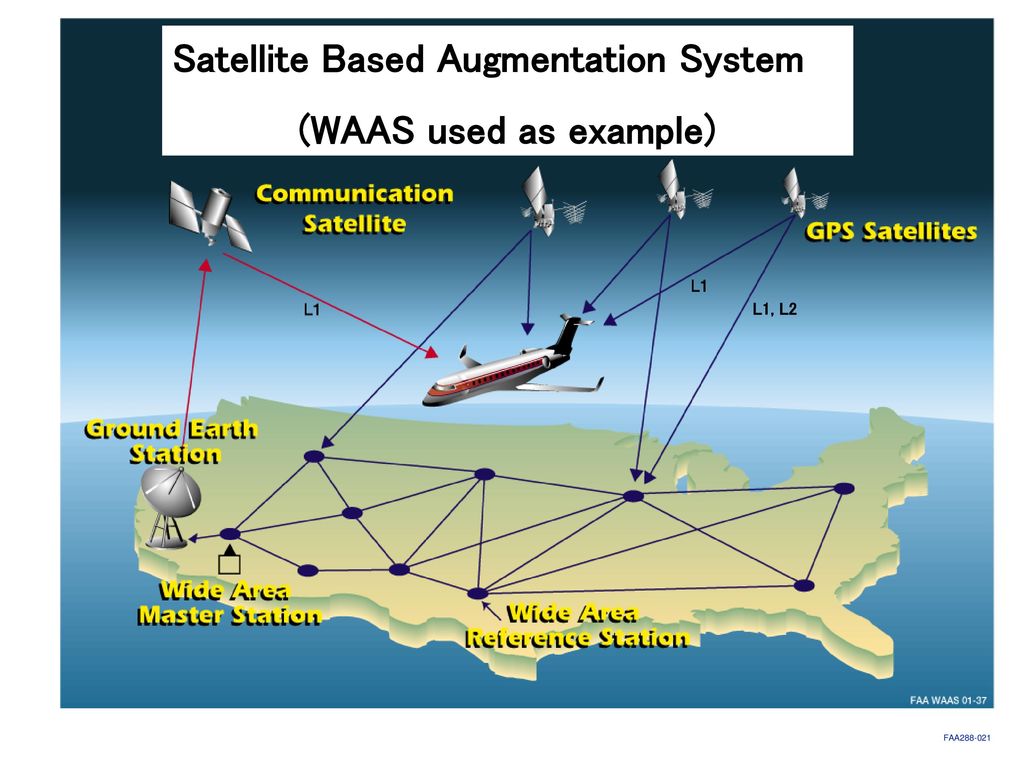
Дифференциальная коррекция может поступать из общественных или коммерческих источников. Одним из наиболее часто используемых источников является общедоступная система реального времени Satellite-Based Augmentation System (SBAS), которая часто называется Wide Area Augmentation System (WAAS). SBAS можно использовать бесплатно, но ваш GPS-приёмник должен её поддерживать. Использование коммерческих служб коррекции обычно требует наличия подписки, также может потребоваться определенный тип GPS-приемника, способного получать сигналы коррекции. Дополнительные сведения можно найти в статье Differential GPS Explained в журнале ArcUser.
SBAS можно использовать бесплатно, но ваш GPS-приёмник должен её поддерживать. Использование коммерческих служб коррекции обычно требует наличия подписки, также может потребоваться определенный тип GPS-приемника, способного получать сигналы коррекции. Дополнительные сведения можно найти в статье Differential GPS Explained в журнале ArcUser.
Приемники GPS, поддерживаемые на iOS
Чтобы подключить приемник с Bluetooth к устройству iOS, приемник должен участвовать в программе MFi а также поддерживать вывод данных в виде выражений NMEA. Следующие приемники можно использовать непосредственно с Survey123 на поддерживаемых устройствах iOS.
Подсказка:
Чтобы узнать версию прошивки вашего приемника GPS, необходимо подключить приемник к устройству, открыть настройки Общие > Об устройстве и выбрать название подключенного приемника.
- Bad Elf GNSS Surveyor и GPS Pro+, GPS Pro и GPS for Lightning Connector
Для GNSS Surveyor и GPS Pro+ необходима версия прошивки 2.
 1.40 или более поздняя. GPS Pro требует версии прошивки не ниже 2.0.90. GPS for Lightning Connector необходима версия прошивки не ниже 1.0.24.
1.40 или более поздняя. GPS Pro требует версии прошивки не ниже 2.0.90. GPS for Lightning Connector необходима версия прошивки не ниже 1.0.24. - Eos Arrow Lite, Arrow 100,Arrow 200 и Arrow Gold – версия прошивки 2.0.251 или более поздняя.
- Garmin GLO и GLO 2
Для GLO требуется прошивка версии 3.00 или более новая, для GLO 2 – 2.1 или более новая.
- Geneq SxBlue II и SxBlue III – версия прошивки 2.251.0 или более новая.
- Juniper Systems Geode
- Leica Zeno GG04 plus – версия прошивки процессорной платы 1.0.20 или более новая.
GPS-приемники, протестированные на Android и Windows
Survey123 работает с любым приемником, поддерживаемом Android или Windows, который воспроизводит предложения NMEA 0183. Хотя Esri не сертифицирует свои устройства, ниже приведен список использованных ими устройств:
Хотя Esri не сертифицирует свои устройства, ниже приведен список использованных ими устройств:
Внимание:
Этот список не является исчерпывающим списком всех устройств, работающих с Survey123.
- Bad Elf GNSS Surveyor, GPS Pro и GPS Pro+.
- Eos Arrow Lite, Arrow 100, Arrow 200 и Arrow Gold
- Garmin GLO¹, Garmin GLO 2¹
- Geneq SxBlue II и SxBlue III²
- Juniper Systems Geode
- Leica GG03¹, GG04 и Zeno 20¹
- Trimble R1, R2, R8s¹ и R10¹
Для получения скорректированных положений с помощью R1 или R2 требуется приложение Trimble’s GNSS Status (Windows или Android). Для вам также необходимо приложение Trimble GNSS Direct.
С приемником Trimble R1 на Windows, Survey123 не может получить доступ к дифференциальным GPS-поправкам с RTX. Однако Survey123 может получить местоположение с автономной фиксацией GPS, а также коррекцию SBAS и коррекцию с локальных базовых станций через NTRIP.

С приемником Trimble R2 на Windows, Survey123 не может получить местоположение с RTX или коррекцию с локальных базовых станций через NTRIP. Survey123 может получать только автономную фиксацию GPS и коррекцию SBAS.
У команды разработчиков были проблемы с сопряжением Trimble R10 с устройствами Samsung Galaxy S5 и S7.
1. Только Android
2. Только Windows
Настройка вашего приёмника
Не все приемники, поддерживающие выражения NMEA, настроены на их передачу сразу, как коробочное решение. В руководстве к устройству должно быть информация о том, как настроить на выходные сообщения NMEA.
Подключите свой приемник к устройству
Survey123 поддерживает встроенные приемники, а также внешние, подключающиеся через Bluetooth. Если приемник встроен в устройство, перейдите к следующему разделу . При использовании внешнего приемника выполните для его подключения к устройству следующие действия:
- Убедитесь, что ваш GPS-приёмник совместим с Survey123.

Ваш приёмник должен поддерживать выходные выражения NMEA и быть настроен на их использование. См. Выбор приемника и Настройка вашего приемника. Эти инструкции необходимо выполнить перед подключением приемника к Survey123.
- Включите свой приемник и разместите его рядом с устройством или компьютером.
Перейдите к настройкам Bluetooth своего устройства и посмотрите, какие устройства для него доступны. Подождите, пока название устройства появится в списке.
Подсказка:
Если ваш приемник Bluetooth не появляется в списке, убедитесь, что он не подключен к другому устройству.
- Чтобы отсоединить ваш приёмник от устройства iOS, в настройках Bluetooth устройства нажмите значок информации рядом с приемником, выберите Забыть это устройство и нажмите Забыть устройство.
- Чтобы отсоединить ваш приёмник от устройства Android, в настройках Bluetooth устройства нажмите значок настроек рядом с приемником и выберите Отменить сопряжение или Забыть.

- Чтобы отсоединить приёмник Bluetooth от устройства Windows, в настройках Bluetooth устройства нажмите имя приёмника, выберите Удалить устройство и нажмите Да.
- Найдите имя приемника в списке, чтобы настроить пару с вашим устройством.
Настройте Survey123 на работу с приемником
Можно настроить несколько приемников на работу с Survey123. Для каждого приемника можно настроить имя, состояние готовности, высоту антенны и высоту над уровнем моря. Эти настройки сохраняются на устройстве для последующего использования.
- Откройте Survey123.
- В главном меню выберите Настройки.
- В меню настройки выберите Местоположение.
- Выберите Добавить провайдера.
- Из списка внешних приемников выберите тот, к которому вы хотите подключиться.
- По умолчанию используется провайдер Внешний приемник типа Bluetooth.
 В списке Внешние приемники будут отображаться все приемники, подключенные к устройству, но еще не добавленные в Survey123. На настольных устройствах, также можно добавить возможность обзора подключенных USB устройств. Чтобы изменить тип перечисленных устройств, отключите обнаружение устройств, отметьте или снимите отметку поиска внешних приемников, затем снова включите обнаружение.
В списке Внешние приемники будут отображаться все приемники, подключенные к устройству, но еще не добавленные в Survey123. На настольных устройствах, также можно добавить возможность обзора подключенных USB устройств. Чтобы изменить тип перечисленных устройств, отключите обнаружение устройств, отметьте или снимите отметку поиска внешних приемников, затем снова включите обнаружение. - Также вы можете подключиться к приемникам, доступным по сети. Выберите Сетевое подключение и введите имя хоста и порт. Выберите Добавить
- Если у вас есть файл журнала NMEA на устройстве, вы можете подключиться к нему и повторно воспроизвести записанные сообщения NMEA. Выберите Добавить из файла, выберите файл журнала. Выберите Добавить
- По умолчанию используется провайдер Внешний приемник типа Bluetooth.
После выбора приемника, он подключается и открывается страница Настройки. Здесь вы можете проверить или изменить настройки приемника, или щелкнув кнопку возврата, вернуться на страницу Местоположение, где можно просмотреть другие настроенные провайдеры, добавить нового или выйти из настроек Survey123.
Преобразования на основе грида в Survey123 не поддерживаются.
Запись файла журнала NMEA для воспроизведения
При выходе на полевые работы вы можете записывать журнал NMEA, который можно воспроизвести при возвращении в офис. Это отлично подходит для демонстрации коллегам в помещении или для работы с технической поддержкой для устранения неожиданного поведения GNSS.
- Перейдите на страницу статус местоположения GNSS.
- Переключитесь на вкладку Отладка.
- Нажмите кнопку записи.
Во время записи вы можете продолжать использовать другие функции приложения. Когда закончите перемещение, вернитесь на вкладку Отладка и остановите запись.
Также журнал NMEA можно создать при использовании интегрированного провайдера местоположений. Положения из устройства переводятся в предложения RMC и GGA , так что их можно прочитать и использовать тем же способом, что и журналы от внешнего приемника.
Записанные файлы журнала NMEA сохраняются в папке:
- Windows – C:\Users\<username>\ArcGIS\My Survey123\Logs
- macOS и Ubuntu—Home/ArcGIS/My Surveys123/Logs
- iOS – Survey123/Documents/ArcGIS/My Surveys123/Logs
- Android – Android/data/com.esri.survey123/files/ArcGIS/My Survey123/Logs
Можно записать журналы NMEA таким же способом в AppStudio Player при помощи образца GNSS Discover, Survey123 или QuickCapture. Журналы, записанные в любом из приложений, могут быть использованы в любом другом из этих приложений.
Режимы измерений, измеряемые величины — Trimble
Кодовый режим — это режим, изначально заложенный в систему. Сигнал каждого спутника содержит его эфемериды — данные о местоположении спутника, позволяющие вычислить координаты спутника в земной системе координат. Кроме того, кодовый сигнал содержит передаваемую каждые шесть секунд временную метку. Момент ухода временной метки со спутника, определенный по часам спутника, подписан на ней. Приемник захватывает сигнал спутника, идентифицирует спутник по коду его сигнала, считывает временную метку и определяет время tr прохождения сигнала от спутника до приемника. Это позволяет вычислить дальность от приемника до спутника. Все было бы именно так, если бы часы приемника и спутника шли синхронно. На самом деле между их показаниями в один и тот же момент времени существует ненулевая разность — относительная поправка часов. Она входит в результат определения дальности. Поэтому в данном случае дальность называют псев додальностью. Говорят, что в кодовом, навигационном режиме измеряемой величиной является кодовая псевдодальность. Поправку часов приемника относительно часов спутника на момент наблюдений определяют как неизвестную величину из обработки результатов этих наблюдений.
Момент ухода временной метки со спутника, определенный по часам спутника, подписан на ней. Приемник захватывает сигнал спутника, идентифицирует спутник по коду его сигнала, считывает временную метку и определяет время tr прохождения сигнала от спутника до приемника. Это позволяет вычислить дальность от приемника до спутника. Все было бы именно так, если бы часы приемника и спутника шли синхронно. На самом деле между их показаниями в один и тот же момент времени существует ненулевая разность — относительная поправка часов. Она входит в результат определения дальности. Поэтому в данном случае дальность называют псев додальностью. Говорят, что в кодовом, навигационном режиме измеряемой величиной является кодовая псевдодальность. Поправку часов приемника относительно часов спутника на момент наблюдений определяют как неизвестную величину из обработки результатов этих наблюдений.Таким образом, для каждого пункта имеется не три неизвестных — три координаты пункта — а четыре неизвестных: три координаты и поправка часов приемника. Следовательно, для мгновенного определения местоположения необходимо, чтобы на антенну приемника одновременно приходили сигналы не менее чем от четырех спутников системы. Созвездие спутников системы обеспечивает это требование.
Следовательно, для мгновенного определения местоположения необходимо, чтобы на антенну приемника одновременно приходили сигналы не менее чем от четырех спутников системы. Созвездие спутников системы обеспечивает это требование.
Фазовый режим — это режим высокоточных геодезических измерений. В нем одновременно участвуют по крайней мере два приемника. В этом режиме получают координаты вектора базы, то есть разность координат пунктов, на которых установлены антенны спутниковых приемников. Ошибка определения вектора базы составляет от нескольких миллиметров до нескольких сантиметров. Измерения выполняют на несущей частоте сигнала спутника, освобожденного от кода процедурой квадратирования. Измеряемой величиной является мгновенная разность фаз сигнала спутника и сигнала генератора приемника. Здесь уместно сказать о терминах абсолютные и относительные определения. По более или менее сложившейся терминологии под абсолютными определениями понимают определение координат пункта, то есть работу в кодовом навигационном режиме. Под относительными определениями понимают определение местоположения одного пункта относительно другого — твердого, исходного пункта. Таков разностный фазовый режим геодезических измерений. Относительными определениями можно также назвать дифференциальный навигационный кодовый режим, когда местоположение и вектор скорости подвижного носителя определяют относительно дифференциальной станции.
Под относительными определениями понимают определение местоположения одного пункта относительно другого — твердого, исходного пункта. Таков разностный фазовый режим геодезических измерений. Относительными определениями можно также назвать дифференциальный навигационный кодовый режим, когда местоположение и вектор скорости подвижного носителя определяют относительно дифференциальной станции.
Допплеровский режим, точнее режим интегрального допплера, является как бы побочным по отношению к фазовому. Допплеровская частота пропорциональна скорости изменения фазы, поэтому допплеровскую частоту получают попутно с измерением фазы, без каких-либо дополнительных затрат. Несмотря на «бесплатность» этот режим дает богатую информацию о местоположении пункта. Следует напомнить, что первые спутниковые радионавигационные системы были исключительно допплеровскими.
Как сказано, режимы наблюдений неразрывно связаны друг с другом. Геодезиста более всего интересует высокоточный фазовый режим, однако приближенные значения координат пунктов, необходимые для уравнивания, он получает из кодовых и допплеровских измерений. Перемещение по объекту и поиск исходных пунктов также очень облегчает использование кодового навигационного режима. Далее рассмотрим измеряемые величины более детально.
Перемещение по объекту и поиск исходных пунктов также очень облегчает использование кодового навигационного режима. Далее рассмотрим измеряемые величины более детально.
1.1. Кодовые псевдодальности Каждый спутник системы излучает несущие колебания с длиной волны около 20 сантиметров, манипулированные по фазе кодовыми последовательностями. О структуре сигнала подробнее написано в разделе 3. Здесь скажем, что все спутники GPS работают на одних и тех же несущих частотах, но каждому спутнику присущ его индивидуальный код. Спутниковый приемник генерирует копии кода каждого спутника и идентифицирует спутники именно по форме кода. Сразу после включения приемника он начинает захват сигналов спутников. Другими словами, приемник выполняет корреляционную обработку сигнала спутника и генерируемых этим приемником копий кодов, перебирая эти копии. Отличие функции корреляции от нуля означает, что спутник идентифицирован, а его сигнал — захвачен.
После захвата сигнала первого же спутника приемник начинает скачивать кодовую информацию, содержащуюся в навигационном спутниковом сообщении. В частности, скачивается альманах. Об этом подробнее написано в разделе 3.2. Иногда приемник самостоятельно принимает решение перейти к скачиванию информации с другого, более «удобного», по его мнению, спутника, как правило, находящегося ближе всего к зениту пункта наблюдения. Вся процедура отражается на дисплее, оператор может это наблюдать, но не может вмешаться. После захвата сигналов достаточного количества спутников приемник начинает определять навигационные координаты своей антенны по измеренным кодовым псевдодальностям. Для определения всех трех координат антенны необходимо работать с четырьмя спутниками. Такой режим обозначают 3D (3 Dimensional) — трехмерный. В навигационных приемниках предусмотрена возможность работы в двумерном режиме 2D. Приемник, пока он успел захватить сигнал только трех спутников, определяет плановые координаты пункта. После захвата сигнала четвертого спутника приемник переходит в режим 3D.
В частности, скачивается альманах. Об этом подробнее написано в разделе 3.2. Иногда приемник самостоятельно принимает решение перейти к скачиванию информации с другого, более «удобного», по его мнению, спутника, как правило, находящегося ближе всего к зениту пункта наблюдения. Вся процедура отражается на дисплее, оператор может это наблюдать, но не может вмешаться. После захвата сигналов достаточного количества спутников приемник начинает определять навигационные координаты своей антенны по измеренным кодовым псевдодальностям. Для определения всех трех координат антенны необходимо работать с четырьмя спутниками. Такой режим обозначают 3D (3 Dimensional) — трехмерный. В навигационных приемниках предусмотрена возможность работы в двумерном режиме 2D. Приемник, пока он успел захватить сигнал только трех спутников, определяет плановые координаты пункта. После захвата сигнала четвертого спутника приемник переходит в режим 3D.
Кодовые псевдодальности определяют из корреляционной обработки кодового сигнала спутника, и копии этого сигнала, генерируемой приёмником. С/А-кодовый и Р-кодовый сигналы спутника сопровождаются временными метками, генерируемые спутниковым стандартом частоты и времени — часами спутника. Аналогично кодовые сигналы приёмника сопровождаются временными метками, генерируемыми часами приёмника. В ходе корреляционной обработки осуществляют поиск максимума коэффициента корреляции двух сигналов. В результате получают относительную временную задержку двух сигналов как временной интервал между одноимёнными временными метками. Этот временной интервал, исправленный за задержки сигнала в атмосфере и еще за влияние ряда факторов и умноженный на скорость сигнала, дает псевдодальность. Ее вычисляют по формуле для случая однократного прохождения сигнала по дистанции. Отличие в том, что результат искажен поправкой часов приемника относительно часов спутника. По физической сути измерение кодовых псевдодальностей выполняют, реализуя временной метод измерений с кодовой модуляцией сигнала, проходящего дистанцию однократно. Зная из навигационного сообщения координаты спутников в момент наблюдений и используя измеренные псев до дальности, приемник определяет координаты антенны.
С/А-кодовый и Р-кодовый сигналы спутника сопровождаются временными метками, генерируемые спутниковым стандартом частоты и времени — часами спутника. Аналогично кодовые сигналы приёмника сопровождаются временными метками, генерируемыми часами приёмника. В ходе корреляционной обработки осуществляют поиск максимума коэффициента корреляции двух сигналов. В результате получают относительную временную задержку двух сигналов как временной интервал между одноимёнными временными метками. Этот временной интервал, исправленный за задержки сигнала в атмосфере и еще за влияние ряда факторов и умноженный на скорость сигнала, дает псевдодальность. Ее вычисляют по формуле для случая однократного прохождения сигнала по дистанции. Отличие в том, что результат искажен поправкой часов приемника относительно часов спутника. По физической сути измерение кодовых псевдодальностей выполняют, реализуя временной метод измерений с кодовой модуляцией сигнала, проходящего дистанцию однократно. Зная из навигационного сообщения координаты спутников в момент наблюдений и используя измеренные псев до дальности, приемник определяет координаты антенны. Задача аналогична линейной пространственной засечке. Отличие в том, что в дополнение к координатам антенны получают поправку часов приемника. Ошибку измерений характеризует URA (User Range Accuracy) — точность измерения дальностей (до каждого спутника) для данного пользователя. Ошибка определения координат и поправки часов зависит также от геометрии наблюдений. Вся эта информация также выдается на дисплей. О геометрическом факторе написано в разделе 1.4.
Задача аналогична линейной пространственной засечке. Отличие в том, что в дополнение к координатам антенны получают поправку часов приемника. Ошибку измерений характеризует URA (User Range Accuracy) — точность измерения дальностей (до каждого спутника) для данного пользователя. Ошибка определения координат и поправки часов зависит также от геометрии наблюдений. Вся эта информация также выдается на дисплей. О геометрическом факторе написано в разделе 1.4.
В кодовом режиме работают все спутниковые приемники — от недорогого чисто кодового навигационного приемника, помещающегося на ладони, до самого совершенного и дорогого геодезического фазового приемника.
1.2. Фазовые измерения В геодезическом приемнике измеряют мгновенную разность фаз сигнала спутника и колебания приемника. Напомним, что фазовые измерения являются наиболее точными. За высокую точность приходится расплачиваться усилиями, потраченными на разрешение многозначности фазовых измерений. Сигнал спутника не является гармоническим, как это необходимо для фазовых измерений. Напротив, он модулирован по фазе сложным псевдошумовым кодом. Чтобы выполнить фазовые измерения, необходимо убрать кодовую модуляцию. Так и делают, используя операцию квадратирования (см. раздел 1.3). Принимаемый сигнал умножают на самого себя. В результате получается сигнал, частота которого равна удвоенной несущей частоте сигнала спутника. Это колебание усиливают и именно на нем выполняют фазовые измерения. При этом кодовую информацию не игнорируют. Ее в полной мере используют для получения навигационных координат пунктов и для приема навигационного сообщения. В спутниковых системах принято обозначать дальность до спутника буквой р. С учетом этого запишем формулу, связывающую дальность до спутника с измеренной разностью фаз. Основой служит формула для беззапросного фазового метода. Для случая спутниковых измерений она имеет вид (1):
Напротив, он модулирован по фазе сложным псевдошумовым кодом. Чтобы выполнить фазовые измерения, необходимо убрать кодовую модуляцию. Так и делают, используя операцию квадратирования (см. раздел 1.3). Принимаемый сигнал умножают на самого себя. В результате получается сигнал, частота которого равна удвоенной несущей частоте сигнала спутника. Это колебание усиливают и именно на нем выполняют фазовые измерения. При этом кодовую информацию не игнорируют. Ее в полной мере используют для получения навигационных координат пунктов и для приема навигационного сообщения. В спутниковых системах принято обозначать дальность до спутника буквой р. С учетом этого запишем формулу, связывающую дальность до спутника с измеренной разностью фаз. Основой служит формула для беззапросного фазового метода. Для случая спутниковых измерений она имеет вид (1):
Здесь ρ(t) — мгновенное расстояние до спутника в момент t; φ(t) — мгновенное измеренное значение разности фаз; δφ? — начальная фаза колебаний спутника; δφr — начальная фаза колебаний приемника.
Таким образом, при кодовых измерениях играет роль несинхронность показаний часов спутника и приемника, а при фазовых измерениях играет роль несинфазность колебаний опорных генераторов спутника и приемника. Аппаратурно, то есть путем организации каких-то дополнительных каналов связи между приемником и спутником, эти параметры определить невозможно. Поэтому несинхронность определяют так, как сказано в разделе 1.1, а несинфазность исключают из результатов обработки путем формирования разностей фазовых измерений, как описано в разделе 4.2.
В формуле (1) измеряемая величина разности фаз меняется со временем из-за изменения дальности до спутника. Вследствие эффекта Допплера со временем меняется значение частоты / принимаемого сигнала.
1.3. Интегральный допплер Допплеровские измерения в режиме интегрирования допплеровской частоты позволяют получать разность расстояний от определяемого пункта до двух исходных пунктов. В случае спутниковых измерений роль исходных пунктов выполняют спутники. Напомним, что в разностных наземных системах определяемый пункт получают как точку пересечения изолиний — гипербол. В случае спутниковых измерений, когда решается не плоская, а пространственная задача, речь идет не о изолиниях, но об изоповерхностях. В случае допплеровских измерений такой поверхностью является гиперболоид; местоположение пункта определяют как точку пересечения гиперболоидов. Их должно быть как минимум три, следовательно, одновременно необходимо наблюдать три пары спутников. Геометрия наблюдений в этом случае такова, что гиперболоиды пересекаются под довольно острыми (тупыми) углами. Это гораздо хуже, чем при дальномерных измерениях, когда изоповерхности — сферы могут пересекаться под углами, близкими к 90°. Тем не менее, гиперболическую засечку, раз она уже есть, используют при обработке результатов в качестве полезного дополнительного материала.
Напомним, что в разностных наземных системах определяемый пункт получают как точку пересечения изолиний — гипербол. В случае спутниковых измерений, когда решается не плоская, а пространственная задача, речь идет не о изолиниях, но об изоповерхностях. В случае допплеровских измерений такой поверхностью является гиперболоид; местоположение пункта определяют как точку пересечения гиперболоидов. Их должно быть как минимум три, следовательно, одновременно необходимо наблюдать три пары спутников. Геометрия наблюдений в этом случае такова, что гиперболоиды пересекаются под довольно острыми (тупыми) углами. Это гораздо хуже, чем при дальномерных измерениях, когда изоповерхности — сферы могут пересекаться под углами, близкими к 90°. Тем не менее, гиперболическую засечку, раз она уже есть, используют при обработке результатов в качестве полезного дополнительного материала.
1.4. Изоповерхности, геометрический фактор Пусть с использованием дальномерного устройства необходимо определить местоположение пункта относительно исходных пунктов. Местоположение вновь определяемого пункта невозможно определить с точностью, которая выше точности измерений. В лучшем случае ошибка определения местоположения равна ошибке измерений. Сказанное можно выразить в виде формулы, связывающей ошибку mопр определения местоположения и ошибку измерения mизм (2):
Местоположение вновь определяемого пункта невозможно определить с точностью, которая выше точности измерений. В лучшем случае ошибка определения местоположения равна ошибке измерений. Сказанное можно выразить в виде формулы, связывающей ошибку mопр определения местоположения и ошибку измерения mизм (2):
mопр=(DOP)mизм
Здесь DOP — Dilution Of Precision — падение ТОЧНОСТИ, размывание ТОЧНОСТИ из-за геометрии наблюдений, геометрический фактор. Применительно к спутниковым наблюдениям — это коэффициент, определяющий, во сколько раз ошибка определения больше ошибки измерения. DOP не может быть меньше единицы, но чем он меньше, тем лучше. Величина DOP зависит от того, под какими углами пересекаются изоповерхности, то есть от геометрии наблюдений.
Существует несколько видов DOP. DOP по плановому положению называют HDOP (Horisontal DOP). DOP по высоте (вертикали) называют VDOP (Vertical DOP). Сумма квадратов этих DOP дает квадрат PDOP, то есть DOP по положению — Position DOP. Опыт работы говорит, что при высокоточных измерения PDOP не должен превышать трех единиц. При рядовых работах, например при определении координат опознаков, он не должен превышать семи. К сожалению, пока не существует инструкций, регламентирующих предельные значения такого рода параметров, да и вообще других допусков на точность и продолжительность измерений. Сейчас все делается лишь на основе собственного опыта. DOP по определению поправки часов называют TDOP (Time DOP). Сумма квадратов PDOP и TDOP дает квадрат GDOP — геометрический DOP (Geometrical DOP). Он является наиболее общей характеристикой геометрических условий наблюдений.
PDOP имеет ясный геометрический смысл. Представим пункт наблюдений, из которого направлены на четыре наблюдаемых спутника векторы единичной длины. Если соединить концы векторов, то образуется трехгранная пирамида. Объем этой пирамиды является величиной, обратной PDOP. Ясно, что чем больше объем пирамиды, тем меньше PDOP, тем точнее определяется местоположение приемника. Например, хорошо, если наблюдается спутник вблизи зенита пункта и спутники, находящиеся невысоко над горизонтом и более-менее равномерно распределенные по азимуту. На самом деле, в области приема антенны приемника находятся много спутников, порой до девяти-десяти. Приемник вычисляет и выдает на дисплей PDOP для спутников, наиболее удачно в геометрическом смысле расположенных относительно приемника.
Приемник радиосигналов | SOMMER RUS Trade
Чем бы вы ни хотели управлять
С приемниками SOMMER это легко.
SOMloq2 — современная радиосистема, работающая в двух направлениях
SOMloq2 – наша радиосистема будущего, соответствующая современным стандартам. Благодаря 128-битному кодированию AES гарантируется высокая надежность передачи.
Радиосистема, работающая в двух направлениях, позволяет использовать множество дополнительных функций, помогающих сделать ваш быт более удобным – от ответных сообщений, принят ли радиосигнал, до запросов статуса ворот и функций Auto Repeat и Hop.
Наши ручные пульты ДУ и приемники радиосигналов позволят вам комфортно управлять своими системами и пользоваться всеми преимуществами дополнительных функций системы SOMloq2.
Пропустить навигациюПриемник-модуль радиосигналов HomeLink
Модуль приемника радиосигналов позволяет с помощью передатчика HomeLink, установленного в автомобиле, управлять приводами и системами управления с радиосистемами SOMloq2.
- Установка «Plug & Play» через последовательный интерфейс на каретке
- Простое программирование непосредственно на приводе
Более подробную информацию можно найти по адресу www.homelink.com
Совместимость
HomeLink версия EURO 2, начиная с года выпуска 2005
Приводы для гаражных ворот SOMMER base+, SOMMER pro+, tiga, tiga+, версия программного обеспечения от V03.03 / год выпуска 05.2017
# S11004-00001
| Наименование | Приемник-модуль радиосигналов HomeLink |
| Радиосистема | HomeLink |
| Ячейки памяти | 12 |
| Частота | FM 434,42 МГц |
SOMup4 (4-канальный)
Приемник-модуль радиосигналов, работающий в двух направлениях, подходит для простого переоборудования приводов и систем управления с приемниками радиосигналов # 7000VXXX на системах SOMloq2 (twist 200 E/EL, twist 350, twist XL, RUNner, RUNner+, SP 900 и блоках управления для промышленных ворот GIGA).
- Возможность получения подтверждения от пульта ДУ, что отправленная команда обрабатывается приемником
- Антенна: встроенная
- Память: программирование на 40 радиокоманд
- разъем для расширения памяти «Memo» (450 радиокоманд)
- Подключение: 20-полюсная штекерная колодка
Режим работы
- Импульсный режим эксплуатации (работа кнопкой): Реле работает постоянно, пока есть радиосигнал
- определяет команду ВКЛ. / ВЫКЛ.: команду для определенного включения и команду для определенного выключения
Арт. № S11442-00001
| Наименование | 4-канальный приемник-модуль радиосигналов SOMup4 в корпусе |
| Радиосистема | SOMloq2 |
| Ячейки памяти | 40 |
| Частота | FM 868,95 МГц |
| Диапазон температур | от — 25°C до + 65°C |
| Электропитание | 5 В пост. тока или 8 –18 В пост. тока |
| Размеры | 60 x 57 x 13 мм |
SOMcom4 (4-канальный)
Приемник радиосигналов, работающий в двух направлениях, подходит для простого переоборудования приводов других производителей и смены радиочастоты.
- Возможность получения подтверждения от пульта ДУ, что отправленная команда обрабатывается приемником
- Возможность запроса статуса реле канала с помощью пульта ДУ (например, «Pearl Status»)
- Предназначен для специальных областей применения (не предназначен в качестве блока управления внутривальных двигателей)
- Антенна: встроенная
- Память: программирование на 40 радиокоманд
- разъем для расширения памяти «Memo» (450 радиокоманд)
- Подключение: винтовые клеммы
- Область применения: внутри и вне помещений
- Управляющий выход: 4 беспотенциальных релейных контакта (переменные, 8 A, 250 В переменного тока)
- Вход кнопочного выключателя: возможность подключения беспотенциального входа кнопочного выключателя
Режим работы
- Импульсный режим эксплуатации (работа кнопкой): Реле работает постоянно, пока есть радиосигнал
- определяет команду ВКЛ. / ВЫКЛ.: команду для определенного включения и команду для определенного выключения
- режим переключения (Toggle): реле включается / выключается по радио, как импульсное реле
- Режим эксплуатации по времени (Time): Реле работает при радиосигнале и прекращает работу после установленного промежутка времени (1– 255 с)
Арт. № S10794-00001
| Наименование | 4-канальный приемник радиосигналов SOMcom4 в корпусе |
| Радиосистема | SOMloq2 |
| Ячейки памяти | 40 |
| Частота | FM 868,95 МГц |
| Диапазон температур | от — 25°C до + 65°C |
| Электропитание | 230 В переменного тока или 12–24 ±20 % В переменного/постоянного тока |
| Степень защиты | IP55 |
| Размеры | 125 x 125 x 60 мм |
SOMcom2 (2-канальный)
Приемник радиосигналов, работающий в двух направлениях, подходит для простого переоборудования приводов других производителей и смены радиочастоты.
- Возможность получения подтверждения от пульта ДУ, что отправленная команда обрабатывается приемником
- Антенна: встроенная
- Память: программирование на 40 радиокоманд
- разъем для расширения памяти «Memo» (450 радиокоманд)
- Подключение: 6-полюсная винтовая клемма
- область применения: сухие, закрытые помещения
Режим работы
- Импульсный режим эксплуатации (работа кнопкой): Реле работает постоянно, пока есть радиосигнал
- определяет команду ВКЛ. / ВЫКЛ.: команду для определенного включения и команду для определенного выключения
- режим переключения (Toggle): реле включается / выключается по радио, как импульсное реле (настройка только через SOMlink)
Арт. № S10696-00001
| Наименование | 2-канальный приемник радиосигналов SOMcom2 в корпусе |
| Радиосистема | SOMloq2 |
| Ячейки памяти | 40 |
| Частота | FM 868,95 МГц |
| Электропитание | 12–24 В перем. / пост. тока |
| Размеры | 109 x 40 x 32 мм |
SOMsocket
Этот приемник радиосигналов в корпусе розетки позволяет вам включать различные приложения и устройства с помощью радиосигналов собственного приемника, работающего в двух направлениях.
- 112 ячеек памяти
- переключающий выход макс. 10 A, напряжение 100–240 В, 50/60 Гц
- экономия энергии (режим ожидания 0,45 Вт)
- возможно ручное переключение потребителей с помощью клавиши на SOMsocket
- активная переадресация радиосигнала с помощью приемника SOMloq2 (функция Hop)
- запрос статуса с помощью ручного пульта ДУ (например, Pearl Status) на предмет включенного или выключенного состояния подключенного потребителя
- Совместимость с SOMlink
Варианты штекерного разъема:
Germany/Германия: Арт. № 21106V000
Франция: Арт. № 21106V030
| Наименование | SOMsocket |
| Радиосистема | SOMloq2 |
| Ячейки памяти | 112 |
| Частота | FM 868,95 МГц |
| Электропитание | 100–240 В перем. тока, 50 / 60 Гц |
| Переключающий выход | макс. 10 А |
| Размеры | 138 × 54 × 40 мм |
SOMplug
Приемник радиосигналов в корпусе розетки «SOMplug», работающий в двух направлениях, подходит для простого переоборудования и дооснащения радиосистемой SOMloq2 приводов ворот.
- 112 ячеек памяти
- беспотенциальный релейный выход через кабель длиной 1,5 м для подключения к входу кнопочного выключателя привода
- переключающий выход макс. 3 A, напряжение 100–240 В, 50/60 Гц
- экономия энергии (режим ожидания 0,45 Вт)
- активная переадресация радиосигнала с помощью приемника SOMloq2 (функция Hop)
- Совместимость с SOMlink
Варианты штекерного разъема:
Germany/Германия: Арт. № 21107V000
Швейцария: Арт. № 21107V010
Великобритания: Арт. № 21107V020
Франция: Арт. № 21107V030
| Наименование | SOMplug |
| Радиосистема | SOMloq2 |
| Ячейки памяти | 112 |
| Частота | FM 868,95 МГц |
| Электропитание | 100–240 В перем. тока, 50 / 60 Гц |
| Переключающий выход | макс. 3 А |
| Размеры | 138 × 54 × 40 мм |
Приемник радиосистемы Somloq Rollingcode
Радиосистема Somloq Rollingcode оптимально защищена от сканирования кода и позволяет предотвратить использование системы в преступных целях лицами, не имеющими доступа. Технология частотной модуляции (FM) менее восприимчива к помехам и повышает надежность передачи. Благодаря высокой избирательности радиосигнал от собственного передатчика очень хорошо распознается приемником, который отличает его от других радиосигналов и надежно принимает. Для наших приемников используются исключительно высококачественные детали, что гарантирует долгий срок эксплуатации и стабильно высокое качество.
Пропустить навигацию2-канальный приемник-модуль радиосигналов в корпусе
Арт. № 4796V000
Этот приемник подходит для работы с изделиями других производителей и для специальных областей применения. Он оснащен винтовой клеммой и разработан для применения с любыми системами управления.
- Антенна: встроенная, по выбору внешняя антенна, арт. № 7004
- Память: программирование на 112 радиокодов
- Управляющий выход: 2 беспотенциальных релейных контакта (замыкающие, 1 А, 24 В постоянного тока)
- Подключение: 6-полюсная винтовая клемма
- Режим работы: импульсный режим (работа кнопкой): Реле работает постоянно, пока есть радиосигнал
| Наименование | 2-канальный приемник-модуль радиосигналов в корпусе |
| Радиосистема | Радиосистема Somloq Rollingcode |
| Ячейки памяти | 112 |
| Частота | FM 868,8 МГц |
| Электропитание | Переменный / постоянный ток 12 … 24 В |
| Размеры | 109 x 40 x 32 мм |
Арт. № 4796V001
- как арт. № 4796V000
- без 6-полюсной винтовой клеммы с предварительно смонтированным кабелем (длина: ок. 400 мм)
Арт. № 4796V002
- Антенна: встроенная, по выбору внешняя антенна, арт. № 7004
- Память: программируется на 448 радиокодов, вставной модуль
- Управляющий выход: 2 беспотенциальных релейных контакта (замыкающие, 1 А, 24 В постоянного тока)
- Подключение: 6-полюсная винтовая клемма
- Режим работы: импульсный режим (работа кнопкой): — Реле работает постоянно, пока есть радиосигнал
- Режим переключения (Toggle): Реле включается и выключается по радио, как импульсное реле
| Наименование | 2-канальный приемник-модуль радиосигналов в корпусе |
| Радиосистема | Радиосистема Somloq Rollingcode |
| Ячейки памяти | 448 |
| Частота | FM 868,8 МГц |
| Электропитание | Переменный / постоянный ток 12 … 24 В |
| Размеры | 109 x 40 x 32 мм |
Радиорозетка
Приемник радиосигналов в корпусе розетки, через который с помощью радиосигналов можно включать / выключать установленное устройство (например, лампу).
- Антенна: встроенная
- Память: программирование на 112 радиокодов
- Переключающий выход — однополюсное включение; макс. 3.500 Вт, макс. 16 (3) A, омическая нагрузка
- Область применения: сухие, закрытые со всех сторон помещения
- Режим работы: режим переключения (Toggle), реле включается / выключается по радио, как импульсное реле
Арт. № 7017V000 (черный)
| Наименование | Радиорозетка |
| Радиосистема | Радиосистема Somloq Rollingcode |
| Ячейки памяти | 112 |
| Частота | FM 868,8 МГц |
| Электропитание | 230 В перем.тока, 50 Гц |
| Размеры | 138 x 54 x 40 мм |
4-канальный приемник радиосигналов, в корпусе, IP65
Подходит для работы с изделиями других производителей (не для блока управления внутривальным двигателем) и других специальных областей применения. Для каждой клавиши ручного пульта ДУ установлен определенный режим работы приемника.
- Антенна встроенная, по выбору установка внешней антенны
- программирование на 112 ручных пультов ДУ
- 4 беспотенциальных релейных контакта (переменные, 8 A, 230 В переменного тока)
- Возможность подключения беспотенциального входа кнопочного выключателя
Арт. № 7001V000
| Наименование | 4-канальный приемник радиосигналов, в корпусе, IP65 |
| Радиосистема | Радиосистема Somloq Rollingcode |
| Ячейки памяти | 448 |
| Частота | FM 868,8 МГц |
| Диапазон температур | от -20°C до +70°C |
| Электропитание | 230 В переменного тока + 10% или 24 В переменного/постоянного тока |
| Размеры | 130 x 130 x 60 мм |
2-канальный приемник радиосигналов, в корпусе, IP65
- как приемник-модуль радиосигналов для арт. № 7001V000, но с 2 беспотенциальными релейными контактами
Арт. № 7002V000
4-канальный приемник-модуль радиосигналов, вставной
- Антенна встроенная, по выбору установка внешней антенны
- программирование на 112 ручных пультов ДУ
- 20-полюсная штекерная колодка
- Режим работы: импульсный режим (работа кнопкой)
- Область применения — на приводах для распашных и откатных ворот
Арт. № 7000V000
| Наименование | 4-канальный приемник-модуль радиосигналов, вставной |
| Радиосистема | Радиосистема Somloq Rollingcode |
| Ячейки памяти | 112 |
| Частота | FM 868,8 МГц |
| Электропитание | Постоянный ток 8 … 18 В |
| Размеры | 54 x 54 x 16 мм |
1-канальный приемник радиосигналов в корпусе розетки
Выход кнопочного выключателя через кабель длиной 1,5 м; для подключения ко входу кнопочного выключателя привода. Это обеспечивает простоту переоснащения приводов других производителей и смену радиочастоты. Нет необходимости в установке электрического оборудования на 230 В. Обратите внимание: подключаться должны не контакты розетки, а провод кнопочного выключателя.
- Антенна: встроенная
- Память: программирование на 112 радиокодов
- Переключающий выход — однополюсное включение; макс. 3.500 Вт, макс. 16 (3) A, омическая нагрузка
- Область применения: сухие, закрытые со всех сторон помещения
- Режим работы: Импульсный режим эксплуатации (работа кнопкой)
Реле работает постоянно, пока есть радиосигнал
Арт. № 7021V000
| Наименование | 1-канальная радиорозетка в корпусе розетки |
| Радиосистема | Радиосистема Somloq Rollingcode |
| Ячейки памяти | 112 |
| Частота | FM 868,8 МГц |
| Электропитание | 230 В перем.тока, 50 Гц |
| Размеры | 138 x 54 x 40 мм |
Funkmanager S, IP30
- для дистанционного управления внутривальными двигателями
- компактная система управления, со встроенным приемником радиосигналов
- подходит ко всем имеющимся в продаже коробкам выключателей (55 мм)
- возможно групповое включение
- для скрытого монтажа (встраиваемый)
- Кодирование — радиосистема Somloq Rollingcode
- Режим работы — целенаправленный, открывание и закрывание
Арт. № 5980V000
| Наименование | Funkmanager S, IP30 |
| Радиосистема | Радиосистема Somloq Rollingcode |
| Частота | FM 868,8 МГц |
| Электропитание | 230 В перем.тока + 10%, 50/60 Гц |
| Размеры | 48 x 51 x 26,5 мм |
FunkManager S в комплекте, IP30
- как арт. № 5980V000
- вкл. ручной пульт ДУ, арт. № 4020V000
Арт. № 5990V000
Сравнительное тестирование GPS/ГЛОНАСС-приемников
Важной частью любой системы мониторинга являются навигационные приемники. В навигационном оборудовании российского производства с 2000 г. присутствовали приемники сигналов GPS импортного производства, но несколько лет назад стали появляться и персональные трекеры со встроенными ГЛОНАСС/GPS-приемниками. Изначально на коммерческом рынке присутствовали только двухсистемные устройства, произведенные на российских предприятиях, которые стоили существенно дороже, а работали хуже GPS-аналогов импортного производства: энергопотребление было в десятки раз выше, чувствительность на столько же децибел хуже, размеры больше и т. д.
Но последние три-четыре года разработчики двухсистемных навигационных приемников не стояли на месте. Выпускаемое ими оборудование постоянно совершенствовалось. Новые устройства все больше приближались к импортным GPS-приемникам по своим потребительским качествам: точности, чувствительности, времени старта, габаритам, энергопотреблению и цене. В 2011 г. были выпущены первые навигационные чипсеты с поддержкой двух спутниковых систем (ГЛОНАСС и GPS) импортного производства, и спустя несколько месяцев многие российские и зарубежные компании начали изготавливать на их основе свои навигационные ГЛОНАСС/GPS-приемники.
Почти весь функционал навигационного приемника и почти все его характеристики определяются тем, какой процессор (или чип) установлен у него внутри. Существует ограниченное количество производителей ГЛОНАСС/GPS-чипсетов: MTK, ST, Qualcomm, u-blox и ряд других, в том числе и отечественных («Навис», «ГеоCтар навигация»). Техническое развитие в отрасли производства навигационных приемников, чипов и модулей на текущий момент дошло до того, что эти чипы уже практически не требуют обвязки. В результате выпустить собственный ГЛОНАСС/GPS-приемник может практически любая компания — достаточно иметь в штате нескольких грамотных инженеров. Например, ГЛОНАСС/GPS-приемники Fastrax IT600, Quectel L16, Telit SL869, НАВИА GL8088s и SimCom Sim68 имеют общую платформу в виде чипсета STA8088 от компании STMicroelectronics.
Испортить характеристики чипа тоже возможно, если квалификация инженеров окажется недостаточной или производитель сэкономит на внешних компонентах обвязки чипсета (входной фильтр, емкости и т. д.). В этих условиях приходится выбирать не столько конкретную модель, сколько качественный чипсет и компетентного производителя.
Конкуренция на рынке ГЛОНАСС/GPS-приемников приобрела чрезвычайно острый характер. Практически каждый месяц, если не чаще, производители выпускают новые модификации своих навигационных устройств или совершенствуют встроенное программное обеспечение уже существующих изделий с целью улучшения тех или иных технических характеристик.
Сложилась негласная традиция сравнивать любой «двухсистемник» с приемником GPS. Это связано с тем, что GPS давно развивается как коммерческая система, выпущено множество поколений устройств, коммерческая эксплуатация которых давно и успешно идет по всему миру. Прежде чем начинать разговор о различных способах сравнительного тестирования современных ГЛОНАСС/GPS-приемников, следует определить требования, которые к ним предъявляет современный рынок.
Во-первых, это высокая чувствительность. У современных GPS-приемников она достигает –165 дБм. Это важная характеристика, особенно для приборов со скрытной установкой с ограниченной видимостью открытого неба.
Во-вторых, низкое энергопотребление. Здесь, оглядываясь на приемники GPS, ожидается получить величину не более 100 мА. Современные GPS-устройства уже давно имеют энергопотребление не более 30–35 мА. Этот параметр особенно важен для систем персонального мониторинга и скрытого слежения. Например, в системе персонального мониторинга с автономным питанием приемник должен работать от встроенного аккумулятора порядка 2–3 лет. Очевидно, для подобных систем энергопотребление является крайне важной характеристикой.
В-третьих, миниатюрность. Некоторые образцы приемников GPS имеют размер порядка 10×10 мм и даже меньше. Наглядным примером является SE880 от Telit Wireless Solutions. Его размеры составляют 4,7×4,7 мм, и присутствует возможность работы как с активной, так и с пассивной антенной. Это очень важно для персональных трекеров и автономных охранно-поисковых систем.
Не на последнем месте стоит и поддержка A-GPS. Возможность работы с различными системами Assisted GPS является значительным преимуществом приемника, поскольку в этом случае он может осуществлять «теплый» и «горячий» старт в разы быстрее, чем устройство, не обладающее поддержкой этих систем. В целом, системы типа A-GPS можно разделить на две основные категории: автономные и использующие внешний веб-ресурс. В первом случае эфемериды спутников рассчитываются внутри самого приемника. Как правило, время действия данных внутреннего расчета меньше, чем у систем второго типа (в среднем 3–5 дней). Во втором случае используются вычислительные ресурсы внешнего сервера. При этом требуется возможность обеспечить загрузку файла с вычисленными эфемеридами с внешнего интернет-ресурса. Как правило, эту возможность обеспечивает GSM-модуль.
И, конечно же, большое значение имеет цена. Очевидно, что конечный пользователь не должен платить за использование двухсистемного приемника GPS/ГЛОНАСС больше, чем односистемного с поддержкой только GPS.
В средствах массовой информации постоянно появляются результаты сравнительных тестов актуальных на данный момент ГЛОНАСС/GPS-приемников. Немалые усилия направляются на то, чтобы выяснить, какой из приемников лучше работает в тех или иных условиях. Разработчику, перед которым стоит задача выбора того или иного навигационного приемника для решения определенной задачи, приходится анализировать огромные объемы информации. Можно с уверенностью сказать, что большая часть информации в СМИ о результатах тестирования и сравнения между собой различных навигационных устройств не только не вносит ясности в ситуацию, но еще больше запутывает и искажает истинное положение вещей. Причин этому несколько.
Сравнительное тестирование навигационных приемников в лабораторных условиях является достаточно дорогостоящей и длительной по времени процедурой. Она по карману далеко не всем предприятиям, занимающимся разработкой навигационного оборудования. Дорогостоящее и длительное по времени лабораторное тестирование навигационных приемников нецелесообразно по причине очень частого обновления их аппаратного и программного обеспечения (ПО). Пока происходит процесс лабораторного тестирования одной версии приемника, уже успевает выйти более новая, что делает испытания предыдущей версии бессмысленными.
Каждый производитель ГЛОНАСС/GPS-приемников выпускает так называемые демонстрационные и отладочные средства (платы), позволяющие конечному пользователю легко и быстро запустить в работу интересующий его приемник. Для этого, как правило, просто достаточно подключить соответствующую демо-плату с ГЛОНАСС/GPS-приемником к персональному компьютеру и запустить специальную программу, позволяющую выводить на экран компьютера различные параметры работы данного устройства. Понятно, что производители стараются тем или иным образом подчеркнуть достоинства и скрыть недостатки своего продукта, часто вводя таким образом конечного пользователя в заблуждение. В таких случаях проблемы проявляются на этапе разработки или эксплуатации конечного изделия в виде возникновения различных аппаратных сбоев или программных ошибок, не описанных в технической документации на приемник. Общеизвестно и то, что производители ГЛОНАСС/GPS-приемников выпускают собственное ПО для персонального компьютера, позволяющее производить наглядную проверку работоспособности устройства. Данное ПО часто использует дополнительные алгоритмы обработки, предназначенные для облегчения восприятия данных, выдаваемых навигационным приемником. Каждая программа предоставляет пользователю собственный уникальный интерфейс. Зачастую способ представления информации в таких программах различен, что затрудняет сравнительный анализ выдаваемых ими характеристик. Положение усугубляется тем, что, как упоминалось раньше, каждый производитель снабжает свои навигационные приемники собственным протоколом работы. Тем временем существует единый общепринятый протокол NMEA [1] для представления навигационной информации, выдаваемой ГЛОНАСС/GPS-приемником. Каждый производитель приемников, помимо собственного протокола, внедряет в своих приемниках и протокол NMEA. С одной стороны, это упрощает задачу сравнительного тестирования ГЛОНАСС/GPS-приемников различных производителей. Но, с другой стороны, как показывает практика, количества информации, выдаваемой по протоколу NMEA, недостаточно для решения некоторых навигационных задач. К тому же данный протокол реализуется разными производителями в своих ГЛОНАСС/GPS-приемниках несколько по-разному: отличаются состав информационных предложений NMEA, последовательность их выдачи и т. д.
Отсутствуют общепринятые стандарты или рекомендации по сравнительному тестированию ГЛОНАСС/GPS-приемников в полевых условиях, без использования специального дорогостоящего оборудования. До сих пор остается открытым вопрос о том, как создать одинаковые условия испытаний для всего набора ГЛОНАСС/GPS-приемников, подлежащих исследованию. Тестирование ГЛОНАСС/GPS-приемников с помощью демонстрационных плат в полевых условиях, как правило, носит субъективный характер: результат зависит от множества случайных факторов, таких как:
- Приемная антенна. Зачастую производители рекомендуют использовать со своими ГЛОНАСС/GPS-приемниками конкретные антенны, которые часто бывают несовместимы между собой, например, по величине напряжения питания. Даже одинаковые антенны из одной серийной партии могут отличаться своими параметрами.
- Время тестирования. В разное время испытаний разных ГЛОНАСС/GPS-приемников в небе присутствует различное количество спутников. Погодные условия, влияющие на процесс распространения радиоволн, тоже могут быть разными.
- Место тестирования. Например, тестирование двух одинаковых ГЛОНАСС/GPS-приемников из одной серийной партии в одно и то же время, но в различных участках земной поверхности, может давать совершенно разные результаты.
Сравнительным тестированием ГЛОНАСС/GPS-приемников в полевых условиях и опубликованием результатов тестирования может заниматься практически любое заинтересованное лицо. Процесс такого тестирования не представляет из себя ничего сложного. Достаточно иметь на руках демонстрационную плату с ГЛОНАСС/GPS-приемником (либо сам приемник) и персональный компьютер с установленной программой тестирования. Еще желательно (но не обязательно) иметь транспортное средство (например, автомобиль) для удобства перемещения.
Таким образом, при проведении сравнительного тестирования нескольких ГЛОНАСС/GPS-приемников необходимо, как минимум, предварительно определиться с набором устройств. В пределах определенной выборки необходимо классифицировать ГЛОНАСС/GPS-приемники по следующим параметрам:
- Чипсет, положенный в основу приемника. Часто бывает, что один и тот же производитель изготавливает свои навигационные приемники на основе различных чипсетов. И наоборот, различные производители изготавливают свои приемники на базе одинаковых чипсетов. В этом случае необходимо принимать во внимание технические особенности того или иного чипсета, ибо они могут отличаться друг от друга напряжением питания, настройками встроенного программного обеспечения, совместимостью или несовместимостью с различными типами приемных антенн. Приемники, изготовленные на основе одинаковых чипсетов, необходимо привести в максимально схожее состояние с помощью программных настроек (скорость обмена данными по последовательному интерфейсу, включение/отключение различных способов фильтрации выдаваемых данных, включение/отключение режимов пониженного энергопотребления).
- Производитель. Возникают ситуации, когда одна фирма выпускает навигационные приемники на базе различных чипсетов, используя при этом единый алгоритм при программной настройке параметров устройств (поддержка одинаковых режимов пониженного энергопотребления, использование для вывода навигационной информации одинаковых протоколов и т. д.).
- Протокол, используемый для вывода навигационной информации во внешние устройства. Как было отмечено, один и тот же производитель ГЛОНАСС/GPS-приемников, как правило, использует в своих приемниках для вывода навигационной информации единый протокол.
- Напряжение питания приемной антенны. Различные приемники могут работать с приемными антеннами с различным напряжением питания.
- Коэффициент усиления приемной антенны. Различные приемники могут поддерживать работу с антеннами с различным коэффициентом усиления.
Далее следует составить перечень навигационных параметров, представляющих наибольший интерес. Например, при онлайн-мониторинге автотранспорта часто требуется, чтобы координаты точки местоположения, выдаваемые навигационным приемником, создавали как можно меньше случайных флуктуаций, пока транспортное средство стоит на месте, поскольку они создают существенные ошибки при оценке пробега транспортного средства
и, соответственно, при оценке расхода горючего. Не менее важно определиться с математическими методами, которые предполагается использовать для обработки интересующего навигационного параметра. Например, при оценке пробега транспортного средства и расхода горючего по замерам, полученным с помощью навигационного приемника, случайные флуктуации измеренных координат могут подвергаться программной фильтрации. С этой точки зрения предпочтительнее оказывается тот навигационный приемник, который совершает редкие флуктуации, но с большой средней амплитудой. Ситуации, когда измеренное приемником местоположение транспортного средства изменилось на величину больше, чем транспортное средство физически могло осуществить, могут быть легко отфильтрованы на программном уровне конечного навигационного устройства. Важно также сделать правильный выбор среди математических методов, которые позволяют наиболее полно осуществить оценку интересующего навигационного параметра в результате тестирования.
Статическое тестирование
В статическом тесте при оценке случайных флуктуаций измеренного навигационным приемником местоположения наиболее тривиальным является использование такого параметра, как общая величина смещения L измеренного местоположения за фиксированное время T или за фиксированное количество замеров N = T/∆t, где ∆t — временной интервал выдачи приемником информации о координатах измеренного местоположения (обычно ∆t = 1 с):
где а0— радиус-вектор, показывающий точку отсчета или истинное местоположение объекта, а аi— радиус-вектор, показывающий измеренное приемником местоположение. Оба параметра могут быть охарактеризованы двумя способами: географическими координатами (широта и долгота) или своими проекциями на координатные оси x и y на плоскости, на которой ведется определение местоположения подвижного объекта. Тот приемник, который покажет наименьшее значение параметра L в статическом тесте, окажется наиболее предпочтительным для использования в системе онлайн-мониторинга транспортного средства при прочих равных условиях. Однако в ряде случаев параметр L может быть неинформативен. Два разных навигационных приемника в статическом тесте могут показать одинаковое значение L. При этом один из приемников будет совершать малое количество флуктуаций с большой амплитудой, а второй — большое количество с малой амплитудой. В таком случае при тестировании наиболее целесообразно использовать такой параметр, как среднеквадратическое отклонение s [2] измеренных значений местоположения ai от некоторого эталонного значения а0.
где N — количество измерений местоположения, сделанных приемником. В качестве эталонного значения местоположения а0может быть выбрано расчетное значение координат, определенное теоретически по навигационной карте, например с помощью сервисов Yandex Maps или Google Maps. Либо в данном качестве можно выбрать одно из определенных экспериментально значений географических координат аk, полученное при помощи тестируемого навигационного приемника. Среднеквадратическое отклонение в данном случае будет иметь физический смысл средней амплитуды отклонения координат, измеренных приемником, от выбранного эталонного значения.
Предположив, что оценки географических координат имеют несмещенный характер, не содержат систематической ошибки, за эталонное значение местоположения а0можно принять среднее значение [3] географических координат местоположения:
Лучшим может считаться тот навигационный приемник, который имеет меньше параметр s.
На рис. 1 изображены случайные флуктуации местоположения, измеренного двумя разными ГЛОНАСС/GPS-приемниками («ГеоС-3» производства КБ «ГеоСтар навигация» и EB-800A производства компании Transystem) в течение 24 ч при статическом тестировании (неподвижной приемной антенне). Параметр L у обоих приемников оказался практически одинаковый. Приемник «ГеоС-3» совершил за данное время случайных флуктуаций в сумме на 15530 м, а EB-800A — 15041 м. При этом приемник «ГеоС-3» показал ряд больших флуктуаций измеренного местоположения («гнездо» оказалось более размытое), а приемник EB-800A — множество мелких флуктуаций («гнездо» на рисунке более плотное и компактное).
Рис. 1. Примеры случайных флуктуаций местоположения, измеренного приемниками в течение 24 ч при статическом тесте:
а) Геос-3;
б) EB-800A
Тем не менее значение s у обоих приемников отличается весьма заметно. За время тестирования «ГеоС-3» показал среднеквадратическое отклонение широты и долготы 0,0001954° и 0,0004256° соответственно. А приемник EB-800A — 0,0001134° и 0,0002458°. Это заставляет сделать вывод о том, что с чисто теоретической точки зрения из двух приемников, подвергнутых статическому тесту, лучше оказывается приемник EB-800A. Но если принять во внимание практические аспекты работы навигационного приемника в реальном устройстве, то окажется, что резкие смещения местоположения, показанные «ГеоС-3», легко отфильтровываются на программном уровне (исходя из тех соображений, что реальное транспортное средство или подвижный объект физически не способно совершать перемещения с такой скоростью). Введение такой фильтрации позволит ощутимо сократить значение параметра L для навигационного приемника «ГеоС-3». Это означает, что величина ложных перемещений транспортного средства или подвижного объекта, оцененных с его помощью, окажется меньше. Ошибка при расчете количества горючего, потребленного транспортным средством, соответственно, тоже. А значит, следует сделать вывод о том, что навигационный приемник «ГеоС-3» оказывается более предпочтительным для использования в задачах онлайн-мониторинга транспортных средств, чем EB-800A. Отсюда следует, что подход, связанный с определением среднеквадратического отклонения s, тоже характеризует поведение навигационного приемника в статическом тесте недостаточно исчерпывающе.
В технической документации [4–10] на каждый приемник производителем обычно заявляется теоретически рассчитанное значение точности определения местоположения.
Обычно для всех современных ГЛОНАСС/GPS-приемников это значение не превышает 2,5 м (табл. 1). Это означает, что теоретический разброс значений, выдаваемых устройством, должен укладываться в область диаметром 2,5 м. На практике же, как показано на рис. 1, реальный разброс значений, выдаваемых приемником, может значительно превышать заявленную в документации погрешность. Поэтому правильнее говорить о вероятности P(|a–a0|≤r) того, что точка a с измеренными приемником координатами попадет в окружность радиуса r с центром в точке a0, где r равен половине заявленной производителем погрешности определения местоположения (например, 2,5/2 = 1,25 м), а a0— истинное значение местоположения. Очевидно, что тот приемник, у которого будет больше значение P(|a–a0|≤r), должен считаться более точным.
|
|
Геос-3 |
EB-800A |
Sim68 |
Sim68R |
MGGS2217 |
ML8088S |
SL869 |
|
Производитель |
КБ «ГеоСтар навигация» |
Transystem |
SimCom |
SimCom |
Satron Electronics |
PetroInTrade |
Telit |
|
Чипсет |
GS3001MP-100 |
MT3333 |
STA8088FG |
MT3333 |
MSR2112 RF, MSB2311 CPU |
STA8088FG |
STA8088FG |
|
Точность |
2,5 |
2,5 |
2 |
2 |
2 |
2 |
2 |
Оценить P(|a–a0|≤r) визуально, построив графики, подобные показанным на рис. 1, не представляется возможным. Визуально можно лишь оценить размеры «гнезда», образованного показаниями навигационного приемника. Но судить о том, что приемник с большим «гнездом» является менее точным, чем с меньшим, было бы ошибочно. Данное «гнездо» имеет неодинаковую плотность на всем своем протяжении. Априори можно утверждать, что плотность «гнезда» будет увеличиваться при приближении к его геометрическому центру, который должен совпадать с местоположением точки a0 (если приемник работает заведомо исправно и не создает дополнительной систематической погрешности измерений). Это связано с тем, что точка с измеренными приемником координатами будет чаще попадать в те области, которые ближе к истинному значению местоположения a0.
Для оценки вероятности P(|a–a0|≤r) необходимо знать функцию плотности вероятности f(a) [11]. Тогда
Для вычисления интеграла (5) удобно представить параметр a, определяющий местоположение объекта на плоскости навигационной карты, в виде отдельных составляющих. В качестве составляющих можно использовать широту и долготу. Но более наглядно будет в данном случае представить параметр a в виде двух проекций axи ayна координатные оси x и y на плоскости, где определяется местоположение подвижного объекта: f(a) = f(ax, ay). Тогда выражение (4) можно переписать следующим образом:
Функцию плотности распределения вероятности f(ax, ay) можно оценить статистически в ходе тестирования навигационного приемника. Навигационный приемник выдает оценку географических координат a (широта) и b (долгота) своего местоположения a. Зная эти координаты, можно вычислить проекции радиус-вектора, проведенного из точки начала отсчета (a = 0 и b = 0) в точку a, на оси x и у в воображаемой системе координат следующим образом:
ax= a × RЗемли; ay= bcos(a) × RЗемли,
где RЗемли— радиус земного шара в метрах (обычно принимается RЗемли= 6371030 м) [12].
Экспериментально было установлено, что плотность распределения вероятностей f(ax, ay) может быть разбита на два независимых друг от друга множителя: f(ax, ay) = fx(ax)fy(ay). Составляющие fx(ax) и fy(ay) могут быть описаны нормальными (гауссовскими) законами распределения [11]:
где среднеквадратические отклонения sxи syи средние значения –axи –ay параметров ax и ay вычисляются по формулам (2) и (3) соответственно, по данным, полученным от навигационного приемника в ходе статического тестирования.
В качестве проверки гипотезы о соответствии полученных экспериментальных результатов нормальному распределению был использован критерий Колмогорова–Смирнова [13]. Критерий используется для того, чтобы определить, подчиняется ли экспериментальное распределение случайной величины предполагаемой модели.
Проверка по критерию Колмогорова–Смирнова подтвердила предположение о том, что при увеличении количества N статистических данных, полученных в ходе тестирования навигационного приемника, плотность распределения вероятностей стремится к нормальному закону. Этот результат хорошо согласуется с центральной предельной теоремой теории вероятностей. Минимальное количество данных N, при котором закон распределения вероятностей можно считать нормальным, равняется 90 000. Если принимать темп выдачи навигационной информации равным 1 Гц, то из этого следует вывод о том, что для получения достоверных результатов тестирование навигационного приемника необходимо выполнять не менее суток (86 400 с).
Критерий Колмогорова–Смирнова отличается сравнительно невысокой вычислительной сложностью и может быть применен в тех случаях, когда плотность распределения вероятности показаний навигационного приемника имеет тяжелые «хвосты» (то есть когда показания навигационного приемника имеют существенный разброс, значительно превышающий погрешность, заявленную в технической документации). В этом случае для подтверждения гипотезы о нормальном распределении показаний навигационного приемника с помощью критерия Колмогорова–Смирнова необходимо увеличивать объем анализируемых данных N. Соответственно, время накопления данных в таком случае должно составлять от нескольких суток до недели.
Для снижения трудозатрат при тестировании можно ограничиться вычислением параметров sx, sy, –ax, –ayв законах распределения (6) и (7) и вычислить вероятность попадания точки a в область, ограниченную квадратом (рис. 2). Тем более что на практике рассмотрение прямоугольной области оказывается более наглядно, потому что автомобильные стоянки, территории складов и прочие городские сооружения обычно имеют прямоугольную форму.
На рис. 2 точка начала координат для наглядности перенесена в точку с координатами (–ax, –ay), потому что в идеальном случае (если навигационный приемник не создает систематической ошибки при измерениях) эти координаты должны совпадать с координатами истинного местоположения навигационного приемника согласно критерию максимального правдоподобия. Длина каждой из сторон квадратной области на рис. 2 равна половине величины точности измерения местоположения, заявленной в технической документации на навигационный приемник.
Рис. 2. Разновидности областей при оценке точности навигационного приемника
Искомая вероятность РК попадания точки a в квадратную область на рис. 2 будет определяться выражением:Интегралы в формулах (8) и (9) от выражений (6) и (7) не вычисляются в аналитической форме, но существует множество способов вычислить их приближенно, поскольку они достаточно хорошо табулированы. Стандартные функции для вычисления данных интегралов присутствуют во всех математических программах для ЭВМ (MathCad, MatLab, Maple и др.), а также в некоторых настольных калькуляторах.
С помощью описанного выше метода можно оценить, например, вероятность того, что показания навигационного приемника не выйдут за пределы прямоугольной области парковки транспортных средств предприятия во время ночной стоянки. Можно также определить размеры территории парковки, достаточные для того, чтобы показания навигационного приемника, установленного на автомобиле, не выходили за ее пределы с некоторой наперед заданной вероятностью.
Вероятность P(|a–a0| ≤ r) попадания точки в окружность радиуса r в аналитической форме оценить затруднительно. Если предположить, что sx= sy, то закон распределения f(a) величины a в формуле (4) описывался бы известным и хорошо изученным распределением Рэлея–Райса [11]. Но, как будет показано ниже, равенство sx= sy, не выполняется. Поэтому для оценки вероятности P(|a–a0| ≤ r) можно воспользоваться приближенной методикой [11]. Необходимо произвести N измерений местоположения навигационным приемником в статическом тесте и посчитать число попаданий N|a – a0| ≤ r данных измерений внутрь окружности радиуса r (рис. 2). Тогда вероятность может быть оценена по приближенной формуле:
Этот же способ можно применить и для грубой оценки вероятности Pк в формуле (10):
Pк≈ Nкв/N, (12)
где Nкв— число попаданий точки внутрь квадратной области на рис. 2.
Можно предложить и другие критерии сравнения ГЛОНАСС/GPS-приемников. Например, сравнивать навигационные приемники по вероятности того, что разница между предыдущим измеренным местоположением (координаты измеренного навигационным приемником местоположения выдаются последовательно во времени) и текущим не превысит некоторого порогового значения. Например, если задаться максимально допустимой скоростью перемещения транспортного средства внутри населенного пункта 60 км/час, то максимальное расстояние, которое данное транспортное средство успеет проехать за 1 с (обычно навигационный приемник выдает координаты своего местоположения с интервалом 1 с), составит около 16,7 м.
В данный момент, с учетом всех перечисленных особенностей процесса статического тестирования ГЛОНАСС/GPS-приемников, разными инженерами предлагаются различные структурные схемы для тестового макета. На рис. 3 показана схема сравнительного тестирования нескольких навигационных приемников при подключении к одной приемной антенне.
Рис. 3. Схема одновременного подключения нескольких навигационных приемников к одной приемной антенне
Питание антенны заводится с отдельного источника через адаптер питания (2) (Bias Tee). Напряжение питания подводится к входу DC (SMA female). Для подключения источника необходим специально изготовленный кабель (6). Ко входу RF&DC (2) подключен адаптер SMA female–SMA female (1), с расчетом использования SMA male на антенном кабеле. Ко входу RF (2) подключен адаптер SMA male–SMA male (3), который с другой стороны подсоединен к входу S четырехвыводного сплиттера (4). Сплиттер имеет четыре выхода (1, 2, 3, 4) для подключения четырех тестируемых приемников. Для предотвращения попадания постоянного напряжения с ВЧ-входов приемников в сплиттер к его выходам подсоединены блокировочные конденсаторы DC blocks (5) — в виде блоков с SMA-разъемами. Со стороны ВЧ-кабелей от приемников (5) обычно используется разъем SMA female.
Все используемые в схеме основные компоненты (кроме SMA адаптеров) имеют потери: Bias Tee — не более 1 дБ; сплиттер — 6–7 дБ, DC block — порядка 0,5–1,0 дБ. То есть суммарно потери могут составить 7–9 дБ. Это необходимо учитывать при выборе усиления антенны и длины кабельного тракта.
К достоинствам данной схемы можно отнести то, что все тестируемые приемники работают одновременно и с одинаковым навигационным сигналом, получаемым со спутников. Очевидным недостатком является то, что сигнал с приемной антенны разветвляется на все тестируемые навигационные приемники, поэтому каждый тестируемый приемник получает сигнал, ослабленный в соответствующее число раз. Это заставляет усомниться в достоверности результатов тестирования, полученных таким образом. Ведь в реальной жизни каждый приемник будет работать только со своей приемной антенной и получать от нее всю энергию сигнала. Соответственно, реальные характеристики каждого приемника будут отличаться от тех, которые получены при помощи тестового макета, изображенного на рис. 3.
На рис. 4 представлена структурная схема другого устройства сравнительного тестирования спутниковых навигационных приемников. Данная схема представляется наиболее предпочтительной для выполнения статического сравнительного тестирования нескольких навигационных приемников.
Рис. 4. Устройство сравнительного тестирования спутниковых навигационных приемников на плоскости:
ПК — персональный компьютер;
БП — блок питания;
ЭА — электрический аккумулятор;
КРП — крепление рабочей поверхности;
A1, A2, A3 — антенны;
П1, П2, П3 — навигационные приемники;
Com — порт ПК
Рабочая поверхность устройства включает в себя металлические крепления для антенн, находящиеся на расстоянии 20 мм друг от друга и 25 мм от края поверхности. Расположение креплений для антенн позволяет утверждать, что антенны поставлены в равные условия эксплуатации. При этом вероятность возникновения помех за счет пересечения боковых лепестков диаграмм направленности антенн сводится к нулю.
Построение и успешное использование данного макета основано на следующих соображениях. Дальномерные коды, используемые в системах GPS и ГЛОНАСС, представляют собой бинарные коды, то есть последовательность из единиц и нулей [14]. Каждому спутнику соответствует своя уникальная последовательность, по которой спутник отождествляется аппаратурой пользователя, даже когда на его антенну одновременно приходят сигналы от нескольких спутников, — известная техника связи множественного доступа с разделением по кодам (CDMA). Точно такие же кодовые последовательности независимо воспроизводятся в приемнике. Посредством совмещения ответной последовательности с принятой последовательностью с помощью коррелятора и, зная момент времени, когда сигнал был передан спутником, можно вычислить время прохождения и, следовательно, дальность r = ct (с — скорость света, t — время прохождения сигнала). Каждый спутник передает два различных кода: C/A (coarse acquisition — «грубое приобретение») и Р (precise — «точный» или protected — «защищенный») коды. Оба кода формируются от генератора 10,23 МГц, C/A-код — с делением частоты на 10, P-код — без изменения частоты. C/A-код является последовательностью из 1023 бинарных цифр или чипов, которые повторяются каждую миллисекунду. Это означает, что чипы генерируются со скоростью 1 023 000 за секунду и каждый имеет продолжительность примерно в 1 мкс. Каждый чип, находясь на несущей волне, проходит через пространство со скоростью света. Поэтому можно преобразовать интервал времени в единицы расстояния, умножив его на эту скорость. Одна микросекунда соответствует примерно 300 м. Это есть длина волны C/A-кода. Считается, что точность измерения расстояния равняется примерно 1% от длины волны, поэтому точность измерения расстояний по C/A-коду равняется примерно 3 м. Реальное значение погрешности оказывается несколько больше, потому что на сигнал со спутника действуют различные помехи. Таким образом, расположив приемные антенны рядом друг с другом в пределах величины погрешности определения местоположения, мы создадим максимально идентичные условия тестирования навигационных приемников. В этих условиях можно считать, что на все приемные антенны будет поступать сигнал со спутника одинаковой мощности. Разность в местоположении всех приемных антенн друг относительно друга заранее известна, поскольку расстояние между ними строго фиксировано. Эта разность может быть далее учтена на этапе обработки путем внесения соответствующих поправок в параметре а0 в формулах (1) и (2).
Как отмечалось ранее, все ГЛОНАСС/GPS-приемники поддерживают выдачу данных по единому протоколу NMEA. Хотя, как показывает практика, состав данного протокола может отличаться в ГЛОНАСС/GPS-приемниках разных производителей. Для того чтобы поставить все тестируемые приемники в максимально идентичные условия, с точки зрения протокола NMEA, была разработана специальная программа для ЭВМ, поддерживающая работу с любыми разновидностями данного протокола, вне зависимости от состава и последовательности выдачи навигационных NMEA-предложений. Типичный внешний вид пользовательского интерфейса данной программы изображен на рис. 5.
Рис. 5. Внешний вид пользовательского интерфейса программы тестирования ГЛОНАСС/GPS-приемников
Данная программа позволяет производить и динамическое тестирование (тестирование в движении или снятие так называемых треков) ГЛОНАСС/GPS-приемника. Для этого необходимо нажать на программную кнопку Map в рабочем окне программы.
Динамическое тестирование
Рассмотрим суть динамического тестирования более подробно. Во многих источниках динамический тест ГЛОНАСС/GPS-приемников представляется как основополагающий, на основе которого делаются выводы о пригодности того или иного приемника для применения в задачах мониторинга подвижных объектов. Теоретически траектория движения транспортного средства представляет собой детерминированную функцию, изменяющуюся в пространстве и во времени. Обычно пространство ограничивается двумя измерениями (траектория отображается на плоскости навигационной карты). Далее большинство авторов тестирования накладывают траекторию, полученную по измерениям навигационного приемника, на ту, которая считается эталонной (например, которая была предварительно нарисована на карте), и анализируют степень расхождения данных двух траекторий. В подавляющем большинстве случаев выполняется визуальный анализ, гораздо реже — с приведением каких-либо численных характеристик. Например, приводятся величины максимального расхождения реальной и теоретической траекторий в неких критических точках (въезд во двор, проезд между высотными домами, проезд под мостом или в подземном туннеле и т. д.). С точки зрения статистического анализа и получения достоверных результатов сравнения такой подход не может быть признан удовлетворительным по ряду причин.
В реальности траектория движения транспортного средства не является полностью детерминированной функцией. Время от времени водитель вынужден изменять траекторию движения, приспосабливаясь к непредсказуемым условиям дорожного движения (перестраивание между полосами, ускорение, торможение и т. д.). То есть сама траектория движения транспортного средства уже является случайной функцией.
При движении ГЛОНАСС/GPS-приемника по некоторой траектории получаем единичную реализацию случайной функции, изменяющуюся в пространстве (на плоскости карты) и во времени. Очевидно, что для полного статистического описания данной случайной функции необходимо иметь в своем распоряжении весь ансамбль реализаций [15] данной функции (полный набор всех возможных траекторий движения). Очевидно, что данный ансамбль реализаций бесконечен.
Случайная функция, получаемая в результате снятия показаний ГЛОНАСС/GPS-приемника в движении, не является стационарной [15]. То есть статистические характеристики (математическое ожидание и дисперсия) зависят от времени и от участка траектории движения в пределах каждой отдельно взятой реализации. Также случайная функция, получаемая в результате снятия показаний ГЛОНАСС/GPS-приемника в движении, не является эргодической [15]. Это значит, что статистические характеристики, вычисленные для отдельно взятой реализации, не будут совпадать со статистическими характеристиками, вычисленными в фиксированный момент времени в фиксированной точке пространства по всему ансамблю реализаций.
Все это свидетельствует о том, что анализ треков перемещения навигационного приемника в том виде, в котором он описывается в СМИ, некорректен. Поведение конкретного навигационного приемника в пределах единично взятой траектории движения транспортного средства не несет в себе информации о точности и достоверности определения местоположения данным приемником.
Можно использовать допущение о том, что при тестировании GPS/ГЛОНАСС-приемника транспортное средство движется строго по детерминированной и заранее известной траектории, не совершая непредсказуемых маневров. Зная точные координаты каждой точки траектории движения, в которой навигационный приемник производил замер своего местоположения, мы можем вычесть эти точные координаты из траектории движения приемника и устранить таким образом пространственную зависимость. После подобной обработки экспериментальных данных можно утверждать, что случайная функция, полученная в результате динамического теста навигационного приемника, приобрела эргодический характер. Она стала стационарной в широком смысле [15], поскольку среднее значение координат перестало зависеть от времени (предполагаем, что среднее значение совпадает с истинным местоположением, что, как правило, выполняется для всех исправных навигационных приемников).
Стационарность в широком смысле позволяет говорить о том, что математическое ожидание и дисперсия, вычисленные по единичной реализации случайной функции, совпадут со значениями, вычисленными в фиксированный момент времени для всего ансамбля реализаций. Таким образом, имея в руках данные о единственной траектории движения навигационного приемника и подвергнув их описанной обработке, можно оценить поведение приемника в динамическом тесте и выполнить сравнение данного приемника с другими.
Можно доказать, что математическое ожидание, вычисленное по описанной выше методике, будет совпадать с математическим ожиданием, вычисленным в ходе статического теста. Среднеквадратическое отклонение, полученное в ходе динамического теста, не будет превышать значение, полученное в ходе статического теста в точке траектории с наихудшими условиями приема. Таким образом, приходим к выводу о том, что трудоемкий динамический тест навигационного приемника может быть заменен статическим тестом в условиях наихудшего приема сигнала, на которые рассчитывается конечное изделие.
Рис. 6. Вероятность попадания точки в область, ограниченную:
а) квадратом;
б) окружностью
На основании приведенных соображений, с использованием тестового макета, показанного на рис. 5, и специально написанной программы (рис. 6), были получены численные результаты сравнительного тестирования семи основных навигационных ГЛОНАСС/GPS-приемников. Эти результаты сведены в таблицу 2.
|
|
«ГеоС-3» |
EB-800A |
Sim68 |
Sim68R |
MGGS2217 |
ML8088S |
SL869 |
|
Заявленная точность, м |
2,5 |
2,5 |
2 |
2 |
2 |
2 |
2 |
|
Время тестирования, ч |
24 |
24 |
24 |
24 |
24 |
24 |
24 |
|
L, м |
15530 |
15042 |
24403 |
30245 |
77762 |
41781 |
81547 |
|
σx, м |
22 |
15 |
37 |
30 |
44 |
28 |
51 |
|
σy, м |
30 |
28 |
52 |
48 |
55 |
33 |
54 |
|
σ, м |
37 |
32 |
64 |
56 |
70 |
43 |
74 |
Сразу следует оговориться, в каких условиях проводилось сравнительное тестирование. Прямая видимость открытого неба отсутствовала. Все испытуемые приемники находились внутри помещения (на 4-м этаже 7-этажного дома) на расстоянии 5 м от окна, выходящего на северо-запад. Условия можно охарактеризовать как затруднительные для работы спутниковых навигационных приемников. Максимальное зафиксированное отношение сигнал/шум 29 дБ, среднее отношение — 22 дБ.
Поскольку, как было показано ранее, численных характеристик в таблице 2 недостаточно для исчерпывающего описания того или иного приемника, автором данной статьи предлагаются дополнительные статистические характеристики. Строятся эти характеристики следующим образом. На плоскости фиксируется область определенного размера (окружность определенного радиуса или квадрат со стороной определенной длины) с геометрическим центром в точке (–аx, –ay) (рис. 2). Далее оценивается вероятность попадания координат, измеренных навигационным приемником, в данную область. Затем размер области увеличивается с определенным шагом и снова производится оценка вероятности попадания в нее координат, измеренных приемником. В итоге получается семейство кривых, изображенных на рис. 6. Каждая кривая соответствует определенному навигационному приемнику.
По мнению автора статьи, статистические характеристики, изображенные на рис. 6, наиболее исчерпывающе характеризуют поведение навигационных приемников в статическом тесте и позволяют произвести их классификацию по областям применения. Например, чем левее и выше расположена кривая, тем больше вероятность попадания точки с измеренными приемником координатами в область меньшего размера. Тем, соответственно, более точным можно считать испытуемый приемник. Чем раньше кривая на рис. 6 достигает значения вероятности 1, тем меньше вероятность того, что испытуемый приемник выдаст оценку координат с резким и существенным отклонением от истинного местоположения. Тем, соответственно, более стабильными можно считать выдаваемые приемником показания.
Выводы
Результаты, приведенные на рис. 6, могут показаться неожиданными, поскольку их невозможно получить с помощью визуального анализа траектории смещения приемника на рис. 1. Однако эти данные позволяют сделать ряд важных выводов.
Вероятность попадания в квадратную область выше, чем в область, ограниченную окружностью. Это вполне логично, поскольку площадь квадрата на рис. 2 больше, чем площадь круга.
По вероятности попадания в область размером до 55–60 м явным лидером оказывается ГЛОНАСС/GPS-приемник Sim68. Его можно рекомендовать для применения в тех ситуациях, когда необходимо получать максимальную точность определения местоположения с высокой вероятностью. Но данный приемник имеет некоторую ощутимую вероятность выхода показаний за пределы области размером 120 м. Это значит, что изредка возможны существенные «аномальные» отклонения показаний данного приемника.
Все «гнездо», построенное на плоскости x, y для приемника EB-800A, практически полностью укладывается в область размером 120 м (вероятность попадания показаний приемника в данную область практически равна 1). Данный приемник можно рекомендовать для тех ситуаций, когда нужно получить минимальную ошибку из-за случайных флуктуаций показаний приемника, например во время ночной стоянки транспортного средства в пределах некоторого паркинга размером 120 м.
Навигационный приемник Geos-3 оказывается компромиссным решением между Sim68 и EB-800A. Он показывает достаточно высокую вероятность попадания измерений в области небольших размеров (данная вероятность больше, чем у EB-800A) и пренебрежимо низкую вероятность выхода за пределы области размером 120 м (данная вероятность меньше, чем у Sim68).
Приемник NAVIA ML8088S показал неоднозначный результат. В случае квадратной области его характеристики оказываются близки к характеристикам «ГеоС-3». Но в случае круглой области приемник ML8088S показал худший результат среди лидеров теста. Он обладает самой низкой вероятностью попадания в круглую область небольших размеров среди данных приемников, и при радиусе области 120 м вероятность попадания в нее еще не достигает 1.
Приемник MGGS2217 производства MStar показал наихудший результат среди всех протестированных устройств, из чего можно сделать вывод о том, что его аппаратная или программная база является на данный момент достаточно устаревшей.
На основании изложенного материала можно сделать следующие выводы.
Процесс сравнительного тестирования нескольких ГЛОНАСС/GPS-приемников представляется несколько более сложным, чем представлено во многих источниках. Достоверные результаты сравнительного тестирования можно получить, только полагаясь на математические методы статистического анализа. Необходимо анализировать всю совокупность численных показателей качества работы приемника, исходя из требований конкретной практической задачи. Можно привести ряд примеров, когда некоторый отдельно взятый приемник, проигрывая по ряду показателей качества своим конкурентам, существенно выигрывает у них по другим параметрам. И это оказывается решающим фактором в пользу его выбора для применения в проекте.
Чаще всего используемый визуальный анализ треков, полученных с помощью того или иного навигационного приемника, неэффективен. Для каждой практической ситуации можно и нужно разрабатывать собственные математические критерии сравнительного тестирования, основываясь на тех характеристиках навигационных приемников, которые наиболее существенным образом влияют на качество решения поставленной задачи.
В работе приведены рекомендации по построению тестового макета для проведения сравнительного тестирования ГЛОНАСС/GPS-приемников в статическом тесте. Динамический тест навигационных приемников (получение треков при движении), как правило, можно заменить статическим тестом в точке траектории движения с наихудшими условиями приема радиосигнала. Несмотря на неинформативность динамического теста ГЛОНАСС/GPS-приемников с точки зрения получения характеристик точности определения местоположения, нельзя не признать его полезность с точки зрения получения некоторых других параметров, например точности оценивания скорости движения транспортного средства. Кроме того, на практике иногда встречаются ситуации, когда работу ГЛОНАСС/GPS-приемника нельзя проверить иначе, чем с помощью динамического теста. К таким случаям относится проезд через длинные подземные (подводные) туннели, куда не проникают практически никакие информационные радиосигналы. В данных условиях статическое тестирование выполнить невозможно. Критерии оценки и сравнения информационных параметров при динамическом тестировании не рассматривались в данной работе.
Что такое GPS? Выбор приемника
ВЫБОР ПРИЕМНИКА GPS
GPS — это система с широкими возможностями и многочисленными областями применения. Приобретение наиболее подходящего приемника GPS требует тщательного анализа того, как он будет использоваться, какого вида информация необходима и что позволяют средства, выделенные на его покупку.
Вот вопросы, на которые необходимо ответить прежде, чем принять решение:
- Что действительно необходимо: — эпизодические по времени местоопределения, или управление непрерывным движением автомобиля, корабля, самолета?
- Необходимо ли точно измерять скорость, например, при таких операциях, как настройка гоночной яхты или оценка характеристик автомобильного двигателя?
- Что является более важным: экономия средств или точность?
- Является ли энергопотребление приобретаемого приемника важным фактором?
- Будет ли приемник применяться при повышенных скоростях и ускорениях?
При большом разнообразии приемников на современном рынке имеет смысл обрисовать основные их типы, а также принципы построения, преимущества и недостатки, им присущие. Можно выделить две обширные группы. В первой окажутся приемники, работающие по принципу последовательного, т.е. поочередного слежения за спутниками рабочего созвездия. Во второй — те, которые отслеживают 4 или более спутников одновременно, т.е. как бы параллельно. Внутри каждой из этих групп существует большое разнообразие приемников разного назначения.
Приемники последовательного слежения
Для вычисления точного положения все приемники GPS должны получать информацию по крайней мере от 4-х спутников. При последовательном слежении для этого используется единственный канал, автоматически переключаемый на прием и обработку сигналов поочередно каждого из спутников созвездия. Такие приемники обычно содержат меньше электронных устройств и потому дешевле и потребляют меньше энергии. К сожалению, непрерывная коммутация единственного канала может оказаться серьезной помехой процессу вычисления координат и тем самым ухудшить точность их определения. К этой группе относятся одноканальные приемники с малым энергопотреблением, обычные одноканальные приемники, быстродействующие мультиплексные одноканальные приемники более поздней разработки и двухканальные приемники.
Одноканальные приемники с малым энергопотреблением
Эти устройства проектируются как очень портативные и поэтому обычно работают на батарейках. Для ограничения потребления они производят определение координат один раз в минуту и затем самостоятельно выключаются.
Для индивидуального использования пешими туристами или при плавании на небольших судах такие приемники являются наилучшим компромиссом. Их точность в большинстве случаев выше, чем точность системы LORAN, и работают они в любой точке земного шара.
Их основные недостатки — это меньшая по сравнению с другими приемниками точность, ограниченные интерфейсные возможности и грубое измерение скорости движения. Поскольку система отключается между измерениями, она не может обеспечить непрерывность, требуемую для точного вычисления скорости. Кроме того, такие приемники обычно снабжаются малопотребляющими устройствами отсчета времени (которые должны работать непрерывно), поэтому их часы недостаточно точны.
Одноканальные приемники
Эти устройства также используют один канал для измерения дальностей до всех спутников рабочего созвездия, но они не ограничены по энергопотреблению. Обычный одноканальный приемник может оставаться включенным постоянно и, следовательно, быть несколько более точным, а также измерять скорость с хорошей точностью по крайней мере до тех пор, пока нет значительных ускорений или резких изменений курса. Поскольку единственный канал используется и для приема сигналов нескольких спутников, и для вычислений дальностей, такие приемники не могут применяться при непрерывном местоопределении.
Кроме того, по техническим причинам нестабильность часов приемника прямо влияет на точность измерений скорости. Например, если в целях уменьшения стоимости приемника в нем используется недорогой опорный генератор, то они выдают величины скоростей, которым не следует полностью доверять.
Быстродействующие мультиплексные одноканальные приемники
Этот вариант очень похож на обычные одноканальные приемники, но в них переключение от спутника к спутнику происходит гораздо быстрее. Настолько, что оказывается возможным практически одновременно и выполнять измерения дальностей, и следить за сигналами спутников, т.е. работать как бы в непрерывном режиме. Приемники, построенные по этому варианту, менее чувствительны к неточности хода часов.
К сожалению, такой подход требует более сложных схемных решений и доводит стоимость почти до стоимости двухканального последовательного приемника, значительно более гибкого и точного.
Двухканальные приемники последовательного слежения
Добавление второго канала значительно расширяет возможности GPS-приемника. Во-первых, вдвое улучшается отношение сигнал/шум системы. В свою очередь это означает, что появляется возможность улавливать спутниковые сигналы при более неблагоприятных условиях и отслеживать спутники, находящиеся ближе к горизонту. Поскольку один канал может быть использован только для обработки информации о координатах местоположения, а второй только для поиска и захвата сигналов очередного спутника, двухканальный приемник не прерывает измерений и вычислений.
Сами определения координат и скорости могут быть гораздо более точными, поскольку, в хорошем двухканальном приемнике используются вычислительные алгоритмы, исключающие влияние неточности хода его часов.
Недостатком двухканального варианта является то, что его реализация может быть более дорогой, и что приемник будет потреблять большую мощность.
Интересно, что в некоторых современных приемниках так широко используются большие интегральные схемы, что увеличение их стоимости от добавки второго канала оказывается незначительным по сравнению со стоимостью хороших часов.
Несмотря на это, двухканальные приемники обычно стоят больше, чем их одноканальные двойники. Это объясняется тем, что пользователи, которые хотят иметь точность и непрерывное функционирование двухканального приемника, обычно хотят иметь и более устойчивое к внешним воздействиям конструктивное оформление приемника, и более совершенные органы управления и отображения информации.
Приемники параллельного (непрерывного) слежения
Приемники, которые отслеживают 4 или более спутников одновременно, могут выдавать мгновенные положение и скорость. Это очень ценно для применения на высокодинамичных объектах и при высокоточных измерениях. Эти устройства часто используются в геодезии и для научных целей. Они могут иметь от 4-х до 10…12 и даже до 24-х каналов слежения.
Кроме очевидного преимущества — непрерывного измерения координат местоположения и скорости, эти многоканальные приемники могут также упростить проблему с GDOP. Вместо того, чтобы строить вычисления на основе сигналов четырех наилучшим образом расположенных спутников, некоторые из этих систем обрабатывают совместно сигналы всех видимых в настоящий момент спутников. Применение к этой избыточной информации соответствующих алгоритмов обработки позволяет получить абсолютный минимум коэффициента увеличения ошибок местоопределения GDOP.
Для 4-х канального приемника отношение сигнал/шум в два раза выше, чем для двухканального, и в четыре раза выше, чем для одноканального. Кроме того, проводя взаимную относительную синхронизацию каналов, можно устранить любые межканальные временные сдвиги, которые могли бы повлиять на точность местоопределения.
Недостатком этого типа систем, является увеличение их размеров, стоимости и потребляемой мощности.
Другие соображения
Помимо преимуществ и недостатков тех или иных архитектур GPS-приемников существует ряд дополнительных соображений, которые необходимо принять во внимание.
Некоторые новейшие системы обеспечивают получение беспрецедентных точностей, отслеживая и псевдослучайный код и несущую частоту. Такая методика, названная «слежение с помощью несущего» («carrier-aided tracking»), дает возможность с большой точностью определять момент появления заднего фронта псевдослучайного кода. А это обеспечивает более точные измерения временных интервалов, что в свою очередь трансформируется в более точные местоопределения.
Все ещё существуют приемники, в которые предварительно, т.е. до того, как они начнут вычисления, необходимо вводить приблизительные значения текущего времени и координат. Хорошие современные приемники начинают работать и без этого, т.е. определяют свое положение в любом месте на земном шаре из «холодного состояния». Эту способность называют «anywhere fix» (досл. — автономный старт в произвольном месте).
При покупке приемника следует обратить внимание и на его пользовательский интерфейс. Есть устройства, обращение с которыми для неспециалиста оказывается слишком сложным. Другие кроме широты и долготы не выдают никакой дополнительной информации и не могут быть подсоединены к компьютерам и другим системам.
Современные, более совершенные приемники, обрабатывая основные спутниковые данные сложными методами, выдают значительно большее количество информации и представляют ее более наглядным образом на экранах с высокой разрешающей способностью, например, накладывая на электронные цифровые карты.
Таким образом, хотя все приемники и имеют дело с одними и теми же данными GPS, используют они их по-разному.
И, конечно, надежность является еще одним существенным критерием при оценке любого прибора, с которым предстоит отправиться в море или дальнее путешествие.
Потребление мощности и сопровождающий его нагрев приемника, являются так же важными, подлежащими постоянному контролю параметрами. Статистика показывает, что количество отказов возрастает в два раза при каждых семи градусах увеличения температуры.
Материал из Википедии — свободной энциклопедии
АО «ПРИН» Приёмник PrinCe i50
Основные преимущества
- Новейший ГНСС чип для отслеживания сигналов: ГЛОНАСС, NAVSTAR GPS, BeiDou, Galileo, SBAS
- Современные модули связи: 4G, УКВ, Bluetooth, Wi-Fi
- Продолжительная работа с возможностью горячей замены аккумуляторов
- Недорогое и эффективное решение
PrinCe i50 оснащается современной 576-канальной платой, которая принимает и обрабатывает как существующие сигналы спутниковых систем глобальной навигации, так и имеет возможность расширения (с помощью обновления МПО) для новых сигналов. Наличие новых алгоритмов отслеживания и обработки сигналов позволяет получать фиксированное решение в сложных условиях, таких как лес и городские «колодцы».
Длительное время работы в суровых условиях
Приёмник изготовлен из высококачественных материалов, что позволяет ему выдерживать падение с 2-х метровой высоты на твёрдое основание, работать при отрицательных температурах до – 40 °С, противостоять суровым погодным условия, полностью защищая от проникновения пыли и выдерживая кратковременное погружение в воду (класс пыле-влагозащиты IP68).
Аккумуляторы повышенной ёмкости с возможностью горячей замены позволяют работать непрерывно в течение рабочего дня без перерыва.
Технологичность
Для возможности работы в режиме RTK в любом месте России PrinCe i50 по умолчанию оснащается всеми современными беспроводными каналами передачи данных: GSM-модем, приёмо-передающий УКВ-модем мощностью 2 Вт. Модули связи Bluetooth и Wi-Fi позволяют настроить приёмник в качестве базы или ровера по УКВ или через мобильный интернет, а также настроить ретрансляцию поправок с GSM на УКВ.
Встроенный электронный уровень позволяет контролировать качество выполняемой съёмки, а также выполнять измерения точек, на которых невозможно выставить веху с приёмником вертикально, например, при съёмке углов зданий.
Запустить настройки приёмника можно с помощью кнопок на передней панели приёмника.
Приёмники PrinCe управляются с помощью программного обеспечения LandStar7 на ОС Android, которое вы можете установить на свой смартфон или на полевые защищенные контроллеры PrinCe серии HCE.
Приёмник PrinCe i50 – это современное решение для выполнения прикладных задач с максимальной эффективностью вложенных в него средств.
4 лучших AV-ресивера для большинства людей 2021
Фото: Майкл ХессионНаш выбор
Yamaha RX-V6A
RX-V6A великолепно звучит, имеет удивительно хорошую коррекцию помещения и проверяет все нужные параметры с точки зрения функций.
Для кого: Если вам нужен отличный универсальный 7.1-канальный ресивер, который не устареет через пару лет, но по-прежнему будет стоить намного ниже 1000 долларов, мы рекомендуем Yamaha RX-V6A. У него достаточно входов для всех ваших исходных устройств — от проигрывателя потокового видео до проигрывателя винила — и его достаточно легко настроить и использовать.Даже если у вас сейчас только 5.1-канальная акустическая система, неплохо иметь два дополнительных канала усилителей, чтобы добавить верхние динамики или вторую аудиозону в будущем. RX-V6A — отличный выбор, если вы думаете о покупке 4K-телевизора, который поддерживает 4K-видео с частотой 120 Гц вместе с источником, который может генерировать такие видеосигналы, например PlayStation 5, поскольку у него есть (или скоро появится ) функции HDMI 2.1, которые необходимы геймерам.
Почему это здорово: Yamaha RX-V6A — отличный исполнитель, который должен удовлетворить потребности большинства людей в фильмах и музыке прямо сейчас, и мы ожидаем, что Yamaha добавит несколько ключевых функций через обновление прошивки очень скоро (возможно, к тому времени, когда вы читаем это), что понравится геймерам.Он имеет множество входов, в том числе вход для фонокорректора для подключения проигрывателя виниловых пластинок, и семь каналов усиления с декодированием Dolby Atmos и DTS: X для добавления дополнительных звуковых эффектов. Кроме того, он загружен всеми платформами и сервисами потоковой передачи музыки, на которые вы, вероятно, подписались, и звучит великолепно благодаря функции коррекции помещения — многоточечным измерениям — чего мы просто не ожидаем увидеть на $ 600. AV-ресивер.
Во время тестов слепого прослушивания мы обнаружили, что не можем отличить большинство этих приемников, когда их коррекция помещения была отключена.Качество коррекции помещения оказало наибольшее влияние на звук, а система коррекции помещения YPAO (Yamaha Parametric room Acoustic Optimizer) RX-V6A помогла добиться лучших результатов, чем то, что мы слышали от чего-либо другого, близкого к его цене. После того, как мы провели коррекцию помещения, звук RX-V6A стал более открытым, детализированным и более динамичным, чем у любого другого устройства стоимостью менее 1000 долларов, что действительно имеет значение, когда вы слушаете музыку.
Что отличает коррекцию помещения RX-V6A, так это возможность разместить прилагаемый микрофон в нескольких положениях во время измерения.Это дает системе YPAO более полный снимок акустики вашей комнаты, позволяя исправить проблемы, влияющие на все (или, по крайней мере, большую часть) сидений в вашем домашнем кинотеатре или медиа-комнате, без чрезмерного глушения звука — проблема, которая затрагивает большинство системы коррекции помещения в этом ценовом диапазоне и практически все системы, которые полагаются только на одну позицию измерения. YPAO не так совершенен, как технология Audyssey MultEQ XT32, встроенная в более дорогой Denon AVR-X3700H, однако с менее изысканной передачей самых глубоких басов, ниже 30 Гц.Но если вы покупаете дешевый сабвуфер для подключения к AV-ресиверу за 600 долларов, сабвуфер вряд ли будет воспроизводить такие глубокие басы (наш бюджетный сабвуфер Dayton Audio SUB-1200 является редким исключением).
Поклонники потоковой музыки оценят, что RX-V6A поддерживает Bluetooth и AirPlay 2, со встроенными функциями Amazon Music, Deezer, Napster, Pandora, SiriusXM, Spotify Connect, Tidal и т. Д. Он также поддерживает голосовое управление Alexa, Google Assistant и Siri и оснащен собственной системой MusicCast от Yamaha, мультирумной беспроводной музыкальной экосистемой, аналогичной Heos от Denon, и автономными системами, такими как Sonos.
Технология MusicCast позволяет подключать динамики объемного звучания и сабвуфер по беспроводной сети, но у нее есть некоторые ограничения. Вам необходимо использовать собственные беспроводные колонки MusicCast 20 или MusicCast 50 от Yamaha в качестве тыловых колонок и MusicCast SUB 100 для басов. Беспроводные передние динамики не поддерживаются, поэтому вам все равно необходимо подключить левый, правый и центральный динамик с помощью кабелей динамиков, а также потолочные динамики, если вы настраиваете систему Atmos / DTS: X. Есть также некоторые другие ограничения, о которых мы подробно расскажем в следующем разделе.
RX-V6A предлагает большое количество входов HDMI, но опирается на другие варианты аналогового и цифрового подключения. Фото: Майкл ХессионЧто касается физических возможностей подключения, RX-V6A довольно щедр в своих HDMI-соединениях, но довольно редко в аналоговой части. Он оснащен четырьмя стереовходами RCA, один из них — вход MM для подключения проигрывателя виниловых пластинок, и это все, что касается поддержки аналоговых источников звука. В нем нет композитных или компонентных видеовходов для подключения старых источников видеосигнала. Вы получаете семь входов HDMI, и все они поддерживают 4K HDR (включая Dolby Vision и Hybrid Log Gamma).Три из них могут похвастаться некоторым уровнем совместимости с HDMI 2.1, а выход HDMI поддерживает eARC. Большинство функций HDMI 2.1, таких как быстрое переключение мультимедиа, быстрая передача кадров, переменная частота обновления, автоматический режим с малой задержкой и возможность передавать несжатое видео 4K 120 Гц, все еще не использовались, когда мы рассматривали RX-V6A, но Yamaha заявляет, что эти функции будут добавлены в обновлении прошивки в апреле 2021 года. Более продвинутые функции, такие как сквозная передача видео 8K, должны появиться позже, возможно, этой осенью.
Наконец, нам просто нравится, как выглядит RX-V6A.Возможно, это не будет большой проблемой для большинства покупателей AV-ресиверов, но элегантный внешний вид этого ресивера Yamaha отличает его от большинства конкурентов, независимо от цены, которую вы, вероятно, оцените, если установите оборудование для домашнего кинотеатра на открытая полка или столешница.
Недостатки, но не недостатки
Набор микросхем HDMI RX-V6A имеет проблему несовместимости с Xbox Series X, которая не позволяет ему правильно передавать видеосигналы 4K 120 Гц. Похоже, это проблема всех новых «8K-совместимых» ресиверов, а не только Yamaha.Если Xbox Series X — ваша игровая консоль следующего поколения, просто знайте, что вам придется направлять сигнал HDMI 4K 120 Гц непосредственно на телевизор и полагаться на eARC для доставки аудиосигнала на ваш ресивер. Но если вы владелец PlayStation 5 или геймер на ПК, вы сможете маршрутизировать сигналы 4K 120 Гц, как только выйдет весеннее обновление прошивки RX-V6A, вероятно, в апреле 2021 года.
Вам необходимо загрузить мобильный телефон Yamaha. приложение (доступно для устройств iOS и Android), чтобы получить доступ к своего рода интуитивно понятному мастеру настройки, который Denon встраивает в свои приемники, или вы можете работать с менее интуитивно понятными экранными меню RX-V6A.В целом настройка по-прежнему довольно проста, и меню RX-V6A довольно легко понять. Но они могли быть лучше.
Пульт ДУ Yamaha RX-V6A немного скуден в кнопках, и мы обнаружили, что он несколько медленно выполняет команды. Вместо этого вы можете использовать универсальный пульт. Фото: Майкл ХессионОдна вещь, которая делает процесс установки довольно простым, а не полностью прямолинейным, — это тот факт, что пульт RX-V6A разреженный и не очень отзывчивый.Мы часто наводили пульт на приемник, нажимали кнопку, думая, что приемник не получил команду, и нажимали ее снова, только чтобы отменить команду, которую мы отправили для начала. В пульте дистанционного управления также отсутствует подсветка, поэтому его сложно использовать в темноте, кроме простых команд, таких как регулировка громкости. Если вы используете универсальный пульт для управления всей развлекательной системой, это не будет проблемой.
Наше самое большое разочарование заключается в том, что добавление беспроводных динамиков объемного звука к RX-V6A лишает возможности использовать возможности многоточечного измерения системы коррекции помещения YPAO, что является одним из самых важных преимуществ этого ресивера.Измерение вашей комнаты только с одного места для сидения приводит к заметно менее точной коррекции помещения и более нестабильной работе от места к месту. Кроме того, для поклонников звука высокого разрешения: вы не можете воспроизводить аудиофайлы DSD при использовании беспроводного окружающего звука, а также ресивер не декодирует звук с дисков SACD или DVD-Audio, отправленных через HDMI.
Определение получателя по Merriam-Webster
приемник | \ ri-ˈsē-vər \б (1) : лицо, назначенное держать в доверительное управление и управлять имуществом в судебном порядке
(2) : лицо, назначенное для ведения бизнеса, связанного с общественными интересами, или для управления корпорацией во время реорганизации.
c : тот, который принимает краденое : заборd : устройство для преобразования сигналов (например, электромагнитных волн) в звуковую или визуальную форму: например,
(1) : Устройство в телефоне для преобразования электрических импульсов или переменного тока в звук.
(2) : радиоприемник с тюнером и усилителем на одном шасси.
(2) : член атакующей команды в футболе, имеющий право поймать пас вперед.
AV-ресиверы | Newegg.com
Подключайте DVD, музыкальные, кабельные и игровые компоненты к AV-ресиверам, чтобы оптимизировать ваши развлекательные системы. Приемники обрабатывают выходные сигналы от устройств и отправляют изображения на дисплеи и звук на динамики. Аудио-видео ресивер предлагает такие функции, как несколько методов ввода, простое подключение к визуальным устройствам, несколько каналов и беспроводное соединение. Используйте стереоресивер для подключения звуковых устройств.
Несколько портов ввода и вывода обеспечивают унифицированную настройку развлечений
Ресивер домашнего кинотеатра с входами HDMI® позволяет пользователям подключать несколько совместимых устройств для гибкости при настройке системы.RCA и цифровые аудиовходы упрощают подключение различных устройств, а удобный разъем для наушников позволяет слушать музыку в индивидуальном порядке. Некоторые модели оснащены входными разъемами для фонокорректора для подключения проигрывателей пластинок и вертушек. Рассмотрите возможность соответствующей эквализации и предварительного усиления с помощью аудио / видео аксессуаров, таких как кабель аудиосигнала, чтобы максимально использовать все подключенные устройства.
Многоканальная конструкция обеспечивает иммерсивное звучание
AV-ресиверы имеют от пяти до тринадцати отдельных каналов, что позволяет пользователям подключать несколько динамиков для получения большего звука.Стандартные системы объемного звучания имеют конфигурации 5.1 с двумя передними динамиками, двумя задними динамиками, центральным блоком и сабвуфером. Это создает кинематографический звук в небольших помещениях. 13,2-канальный домашний кинотеатр обеспечивает дополнительные соединения для трехмерного звука в просторных комнатах. Встроенные декодеры объемного звука, такие как Dolby® TrueHD, Dolby Atmos® и DTS Virtual: X ™, помогают обеспечить четкое трехмерное звучание с совместимыми динамиками и звуковыми панелями.
Гарантия будущего для просмотра телевизора
Многие AV-ресиверы включают функции, которые работают с современными видеоустройствами, такими как Roku®, Apple TV® и другими будущими телевизионными технологиями.AV-ресиверы с возможностью переключения 4K позволяют передавать как изображение, так и звук от видеоисточников через звуковую систему для получения детализированных изображений и звука живого исполнения. Поддержка расширенного динамического диапазона (HDV), Dolby Vision (DV) и гибридной логарифмической гаммы (HLG) позволяет совместимым телевизорам генерировать более высокий пиксельный и цветовой контраст для более глубокого и точного изображения. Встроенный Wi-Fi® обеспечивает потоковую передачу музыки в Интернете без физического подключения аудиосистемы к маршрутизатору.
Удобный пульт дистанционного управления
Большинство AV-ресиверов поставляются с пультами дистанционного управления, которые предлагают такие возможности, как набор настроек и переключение источников.На некоторых пультах дистанционного управления есть кнопки «сцены», которые настроены на такие действия, как прослушивание FM-радио или просмотр телевизора. Ресиверы с возможностью подключения к сети предлагают бесплатные приложения iOS® и Android ™ для использования вашего планшета или телефона в качестве пульта дистанционного управления. Некоторые модели поддерживают Google Home Hub ™ или Amazon Alexa для голосовых команд вместо использования пульта дистанционного управления.
Расширенные функции для аудио всего дома
AV-ресивер с Bluetooth® может принимать беспроводные потоки и воспроизводить музыку с совместимых устройств. Некоторые модели имеют режим ожидания Bluetooth, позволяющий дистанционно включать приемник.Возможность использования нескольких зон позволяет распределять воспроизведение звука по другим комнатам, уменьшая потребность в различных системах в каждой комнате. Некоторые ресиверы имеют входные разъемы AUX 3,5 мм для подключения дополнительных устаревших аудиокомпонентов, таких как портативные кассетные плееры. Стереоресиверы для спутникового радио позволяют пользователям слушать станции Sirius ™, XM и AM / FM.
Определение приемника
Что такое приемник?
Получатель — это лицо, назначенное хранителем имущества, финансов, общих активов или коммерческих операций физического или юридического лица.Управляющие могут назначаться судами, государственными регулирующими органами или частными организациями. Получатели стремятся реализовать и обезопасить активы и управлять делами для выплаты долгов. Для предприятий получатели стремятся максимизировать прибыль и стоимость активов и либо прекращают операции, либо продают всю компанию или ее часть. Когда назначается управляющий, считается, что компания находится «под управлением».
Ключевые выводы
- Получатель — это лицо, назначенное судом, государственным регулирующим органом или частным лицом для управления консолидацией долга компании.
- Когда назначается управляющий, считается, что компания находится «в управлении».
- Конкурсное производство — альтернатива банкротству.
Понимание роли получателя
Приемное участие — альтернатива банкротству и потенциально лучший вариант для компаний, сталкивающихся с финансовыми трудностями. По сравнению с банкротством, процедура конкурсного производства менее клейма, требует меньше документов и требует меньше судебных разбирательств. Это действие приведет к снижению затрат для всех сторон.
Процедура конкурсного производства является альтернативой объявлению банкротства для многих компаний. Получатель управляет процессом выплаты долга и взимает за это комиссию; однако это обходится дешевле, чем банкротство.
Обязанности получателя
Получатель уведомит кредиторов о приеме на рассмотрение, поскольку они проверяют финансы и операции корпорации на предмет выявления недостатков. Если ликвидация является предпочтительным или единственным вариантом, получатель продает активы, обеспеченные по каждому контракту.Получатели контролируют распределение поступлений от ликвидации после вычета комиссий и расходов по конкурсному производству. Распределение активов осуществляется в приоритетном порядке. Необеспеченные кредиторы получают платеж, если средства остаются после выплаты обеспеченным кредиторам и другим кредиторам с более высоким приоритетом.
Если реструктуризация возможна, получатель согласовывает условия с кредиторами и составляет план погашения. Получатель может также нанять новое руководство для более эффективного и прибыльного управления компанией. Получатель внимательно следит за администрацией и представляет ежемесячный отчет о проделанной работе и статусе компании, ее кредиторам и суду.Роль совета директоров приостанавливается до тех пор, пока компания не выйдет из-под контроля.
Преимущества и недостатки назначенного управляющего
Назначенный судом управляющий — это нейтральная сторонняя организация, которая работает от имени компании и ее кредиторов для заключения взаимовыгодных соглашений. Общаясь с нейтральным управляющим, корпорация и ее кредиторы с большей вероятностью достигнут благоприятного взаимопонимания и за меньшее время, чем в рамках процедуры банкротства.Поскольку процесс конкурсного отбора начинается быстро, многие сотрудники не обращают внимания на изменения в корпорации, такие как принудительное увольнение и сокращение пособий или заработной платы.
Fast Fact
Присяжные, назначенные судом, являются должностными лицами суда назначения; они не действуют в качестве доверенных лиц кредиторов (то есть защищают интересы тех, кому причитаются деньги), как должники и попечители в делах о банкротстве.
Получатель может гибко разрабатывать стратегии выплаты долгов компании, которые обычно недоступны при банкротстве.Для кредиторов и акционеров можно получить больше денег, что потенциально спасет компанию от закрытия. Однако, в зависимости от поступлений от продажи активов и сумм, причитающихся по обеспеченным и необеспеченным долгам, не всем кредиторам и акционерам выплачиваются выплаты во время ликвидации.
Определение «рамы или ствольной коробки» и идентификация огнестрельного оружия
7 мая 2021 года Генеральный прокурор подписал предложенное ATF правило 2021R-05, «Определение« рамы или ствольной коробки »и идентификация огнестрельного оружия ».Цель предлагаемого правила — обеспечить надлежащую маркировку, учет и отслеживаемость всего огнестрельного оружия, произведенного, импортированного, приобретенного и утилизированного федеральными лицензиатами огнестрельного оружия.
Обратите внимание, что это текст предлагаемого правила, подписанный Генеральным прокурором, но официальная версия предлагаемого правила будет такой, как она опубликована в Федеральном реестре.
Скачать предлагаемое правило (PDF, 1,3 МБ)
Сводка
Это предлагаемое правило:
- Дайте новые определения «корпус или ствольная коробка огнестрельного оружия» и «корпус или ствольная коробка»
- Изменить определение:
- «огнестрельное оружие», чтобы пояснить, когда комплект деталей огнестрельного оружия считается «огнестрельным оружием», и
- «оружейник», чтобы уточнить значение этого термина и пояснить, что оружейники могут иметь лицензию только на маркировку огнестрельного оружия для лиц, не имеющих лицензии.
- Дайте определения для:
- «полное оружие»,
- «Глушитель в сборе или глушитель в сборе»,
- «огнестрельное оружие частного производства (PMF)» и
- «легко» для ясности с учетом достижений в технологии огнестрельного оружия.
- Дайте определение «серийному номеру импортера или производителя»
- Укажите крайний срок маркировки произведенного огнестрельного оружия.
- Уточнить требования к маркировке глушителей и глушителей огнестрельного оружия.
- Изменить формат записей о производстве / приобретении и утилизации производителями и импортерами.
- Изменить записи о периоде времени, которые должны храниться в лицензированном помещении.
Прочитать полное описание
Оставить комментарий
ATF получает комментарии по предлагаемому правилу на 90 дней с даты размещения предлагаемого правила в Федеральном реестре.
Вы можете отправлять комментарии по почте, факсу или через Федеральный портал электронного регулирования по адресу www.rules.gov.
Как отправить
Связанные ресурсы
Свяжитесь с нами
Вопросы относительно предлагаемого правила направляйте по адресу [email protected].
Лучшие AV-ресиверы 2021 года: великолепные усилители для домашнего кинотеатра
Руководство по покупке лучших AV-ресиверов: Добро пожаловать в What Hi-Fi? — обзор лучших усилителей для домашних кинотеатров, которые вы можете купить в 2021 году.
Звуковые панели могут быть простым и компактным способом улучшить звук вашего телевизора но если вы действительно хотите получить настоящий домашний кинотеатр, ничто не заменит комплект громкоговорителей объемного звука с питанием от AV-ресивера.
Усилитель домашнего кинотеатра — это мозг и мускулатура любого домашнего кинотеатра. Он гарантирует, что ваш телевизор и фильмы звучат мощно, детально и динамично и по-настоящему дадут вам ощущение полного погружения.
Большинство AV-ресиверов теперь включают поддержку Dolby Atmos и DTS: X для добавления еще большего количества каналов звука с добавлением громкоговорителей с верхним каналом, или, конечно, они могут воспроизводить ванильный объемный звук 5.1. Ожидайте, что входы HDMI могут передавать видео 4K и HDR с поддержкой голосового помощника, беспроводным аудио Bluetooth и дополнительными функциями Apple AirPlay на значительном количестве моделей в наши дни.
Но, прежде всего, лучшие AV-ресиверы обеспечивают великолепный звук, заполняющий всю комнату. И это наша подборка из них, все они опробованы, протестированы и отмечены звездами в наших специализированных испытательных комнатах.
(Изображение предоставлено: Future)
1. Denon AVC-X3700H
Denon снова поднимает планку того, что можно достичь менее чем за тысячу долларов.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Поддержка видео: 8K HDR | Форматы окружающего звука: Dolby Atmos, DTS: X, IMAX Enhanced | Входы HDMI: 7 | Аудио высокого разрешения: 24 бит / 192 кГц и DSD | Bluetooth: Да | Стриминговые сервисы: Spotify, Tidal.Qobuz, AirPlay, YouTube | Аудиоканалы: 9.2 | Размеры: 16,7 x 43,4 x 37,9 см (ВxШxГ)
Причины для покупки
Прекрасно четкие и подробные
Динамичные и привлекательные
HDMI 2.1 и 8K
Лучшие предложения на сегодня
Когда вы слушаете лучшие в своем классе продукты так часто, как и мы, вы сразу же узнаете, когда установлен новый стандарт. Тем не менее, иногда требуется прямое сравнение с другим превосходным продуктом, чтобы понять, насколько высоко поднята планка.
Так обстоит дело с новым усилителем домашнего кинотеатра Denon AVC-X3700H с поддержкой 8K. Хотя может быть небольшая часть из нас, которая обрадуется, если японская компания испортила один из этих усилителей — чисто для того, чтобы у нас было что-то другое написать, — звуковое улучшение, которое она внесла в прошлогоднюю модель, весьма удивительно заметно.
Энергия выступления сразу бросается в глаза. Мышцы стали мощнее, чем раньше, но они еще меньше и четче очерчены. Это сочетание твердой динамической экспрессии, которая вызывает восторг у каждой вокальной партии, а также отличает один выстрел от другого, более резкий удар и большую ясность, что позволяет вам глубже проникнуть в саундтрек и стать более погруженным.
Если у вас есть соответствующая система, то AVC-X3700H — это еще одна разработка Denon, которая прослужит вам долгие годы.
Прочтите полный обзор: Denon AVC-X3700H
2. Sony STR-DN1080
Лучший AV-ресивер в своем классе. Отличный комплект за свои деньги.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Поддержка видео: 4K HDR | Форматы окружающего звука: Dolby Atmos и DTS: X | Входы HDMI: 6 | Аудио высокого разрешения: 24 бит / 192 кГц и DSD | Bluetooth: Да | Стриминговые сервисы: Spotify, Tidal.Qobuz, AirPlay, YouTube | Аудиоканалы: 7.2 | Размеры: 15,6 x 43 x 33 см (В x Ш x Г)
Причины для покупки
Быстрый, маневренный и точный
Приятные и динамичные характеристики
Широкие возможности
Причины, которых следует избегать
Пульт дистанционного управления с подсветкой
был бы неплохим
Лучшие предложенияТот факт, что этот продукт был нашим продуктом года два года подряд и получил четвертую награду в 2020 году, говорит вам все, что вам нужно знать.Этот невероятно талантливый AV-ресивер был лучшим в своем классе, когда мы первоначально тестировали его, и остается сенсационным соотношением цены и качества.
А что касается звука, который он издает … ну, скажем так, вам придется потратить намного больше денег, чтобы получить лучшую производительность. Многофункциональный Sony STR-DN1080 звучит фантастически, раскрывая все свои возможности, чтобы обеспечить производительность, наполненную энергией, динамизмом и авторитетом, чего мы не слышали от усилителей для домашних кинотеатров за такую цену.
От естественных, выразительных голосов до уровней понимания и глубины, окружающих каждый звуковой эффект, — невероятное количество деталей.Говоря динамически, это забавное и захватывающее прослушивание, в равной степени дома воспроизводящее спокойные, тихие моменты и огромные, сотрясающие стены взрывы. Одним словом, увлекательно.
Прочтите полный обзор: Sony STR-DN1080
(Изображение предоставлено: Future)
3. Denon AVC-X6700H
Мощный усилитель, которого стоило ждать.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Выходная мощность: 205 Вт | Каналы: 11.2 | Поддержка видео: 8K HDR | Форматы окружающего звука: Dolby Atmos, DTS: X, IMAX Enhanced | Входы HDMI: 8 | Wi-Fi: Да | Bluetooth: Да | Размеры: 16.7 x 43,4 x 37,9 см (ВxШxГ)
Причины для покупки
Впечатляющий масштаб и авторитет
Улучшенная детализация и выражение
Поддержка 8K
Причины, по которым следует избегать
Некоторые могут захотеть набрать бас
Линия 6000 была один из тех, кто Denon решил не обновляться в 2019 году, подождав до этого года, чтобы удвоить эти ежегодные улучшения. Вернувшись, он сумел добиться еще большей производительности и переоценить — если не совсем переопределить — то, что достижимо с усилителем для домашнего кинотеатра с двумя громкоговорителями.
Это, безусловно, более мощная презентация, чем два года назад — не в большом количестве, но достаточно, чтобы заметить, когда вы использовали AVC-X6500H так же часто, как и мы, — и этот Denon владеет этой силой с большим энтузиазмом и точностью. .
Весы также более насыщены басами, чем в предыдущих поколениях, и некоторые могут время от времени уменьшать их, но любой дополнительный вес не замедляет работу AVC-X6700H. Это просто заставляет чувствовать себя более контролируемым и взрослым исполнением, с дополнительными низкими частотами, работающими над воспроизведением полных и реалистичных голосов, а также иногда с боксом по комнате.
Прочтите полный обзор: Denon AVC-X6700H
(Изображение предоставлено Denon)
4. Denon AVR-X2700H
Еще один ремень AVR начального уровня от Denon.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Выходная мощность: 150 Вт | Каналы: 7.1 | Поддержка видео: 8K HDR | Форматы окружающего звука: Dolby Atmos, DTS: X, IMAX Enhanced | Входы HDMI: 7 | Wi-Fi: Да | Bluetooth: Да | Размеры: 16.7 x 43,4 x 33 см (В x Ш x Г)
Причины для покупки
Превосходное пространственное управление
Превосходное чувство ритма
HDMI 2.1 и 8K
Если бы нам пришлось использовать одно слово для описания звука этого ресивера, это было бы ‘уверенная в себе’. AVR-X2700H не слишком старается произвести впечатление, как это может сделать бюджетный усилитель с недостаточной мощностью.
Он больше, лучше и культурнее. У него даже больший авторитет, чем у прошлогодней модели, и он никогда не напрягается.Два сабвуфера в нашей настройке 7.2 управляются, когда это необходимо, ни разу не умаляя кристальной чистоты музыки в саундтреке, голосов или эффектов объемного звучания.
Слушать легко и эффективно. Независимо от того, насколько напряженным становится действие, этот Denon никогда не упускает ни одной детали. Он передает лазерные лучи от одного говорящего к другому в удивительно последовательной манере и, независимо от сцены, создает подлинное ощущение места.
Прочтите полный обзор: Denon AVR-X2700H
(Изображение предоставлено Denon)
5.Denon AVR-X3600H
Бывший обладатель награды, который до сих пор остается на высоте.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Выходная мощность: 180 Вт | Каналы: 9 | Поддержка видео: 4K HDR | Форматы окружающего звука: Dolby Atmos, DTS: X, Dolby Vision | Входы HDMI: 8 | Wi-Fi: Да | Bluetooth: Да | Размеры: 16,7 x 43,4 x 3 см (ВxШxГ)
Причины для покупки
Добавлены каналы усиления
Больше мощности, чем у его предшественника
Преимущества эффективных технологий
Иногда различия между поколениями домашних кинотеатров Denon могут показаться незначительными.Но с AVR-X3600H этого не произошло.
Вместо того, чтобы просто обновить отмеченный наградами AVR-X3500H 2018 года, Denon добавил два канала усилителей и вычислительную мощность для дополнительной пары, модернизировал блок питания и силовой трансформатор, а также экструдированный алюминиевый радиатор.
Но самое главное, что звук стал поистине впечатляющим. Его предшественник был мускулистым, но этот усилитель еще более четко очерчен и находится в полной боевой готовности.
Дело не в том, что это в целом более мощный усилитель, чем отмеченный наградами AVR-X3500H — уже сам по себе мощный ресивер — но его мускулы кажутся более компактными, а удары, как правило, сильнее.
Воистину, это тяжеловес во всех смыслах этого слова. Вот почему мы назвали его нашим AV-ресивером «Продукт года» на 2019 год. По соотношению цена / качество он уступает только его преемнику, указанному выше.
Прочтите полный обзор: Denon AVR-X3600H
6. Denon AVR-X4500H
Еще один талантливый AV-усилитель из превосходного диапазона Denon.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Выходная мощность: 125 Вт | Каналы: 7.2 | Входы HDMI: 8 | Выходы HDMI: 3 | Поддержка видео: 4K, HDR | Форматы окружающего звука: Dolby Atmos, DTS: X, DTS Virtual: X | Характеристики: AirPlay 2, Siri, опционально Alexa и Google Assistant | Размеры: 17 x 43 x 38 см (В x Ш x Г)
Причины для покупки
Обладает мощностью и присутствием
Выразительный и энергичный
Множество функций
AVR-X4500H является частью той же серии, отмеченной наградами Denon, что и X3500H, но в отличие от этой модели, которой уже два поколения, X4500H только освобождают от работы, так что вы все равно можете получить приличную сделку.
Этот усилитель может похвастаться 125 Вт усилением (на 8 Ом с двумя управляемыми каналами) по каждому из его девяти каналов, что дает вам собственный доступ к конфигурациям динамиков Dolby Atmos и DTS: X вплоть до 7.2.2 или 5.2.4. В то же время 11,2-канальная обработка означает, что вы можете перейти сразу к 7.2.4, если вы готовы добавить дополнительный двухканальный усилитель. Он также имеет практически все характеристики и функции, которые вы можете пожелать от современного AV-усилителя.
Но все дело в звуке. Здесь чертовски много мощности, что ярко демонстрирует мясистая нижняя часть, которая обеспечивает мощь и вес, не искажая чистый, равномерно сбалансированный звук.Лучшие в своем классе параметры синхронизации и динамики гарантируют, что даже музыка звучит достойно для усилителя объемного звука. Но объемный звук — это сильная сторона этого усилителя, и если у вас есть деньги, вы не сможете ничего лучше.
Прочтите полный обзор: Denon AVR-X4500H
7. Yamaha RX-A1080
Хороший AV-ресивер за свои деньги.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Выходная мощность: 170 Вт | Каналы: 7.2 | Поддержка видео: 4K HDR | Форматы окружающего звука: Dolby Atmos, DTS: X | Входы HDMI: 7 | Wi-Fi: Да | Bluetooth: Да | Размеры: 18.2 x 43,5 x 43,9 см (HWD)
Причины для покупки
Огромный звук
Множество деталей
Множество функций
Когда дело доходит до AV-ресиверов премиум-класса Yamaha, обычно можно сделать несколько беспроигрышных ставок: сборка будет по крайней мере соответствовать своему ценнику; у него будет потрясающее звуковое поле; будет больше возможностей, чем воскресная газета. И RX-A1080 справляется с этим.
Помимо набора цифровых и аналоговых входов для музыкальных источников, Yamaha наделила RX-A1080 встроенными потоковыми сервисами, такими как Spotify, Tidal, Qobuz и Deezer, а также предоставила поддержку для управления усилителем. пользователя Alexa Voice Control.
Качество звучания равномерное и хорошо округленное, предлагая тот же характер эффекту, который переключается между динамиками, начиная с правого плеча и заканчивая передним левым. Тем не менее, когда дело касается организации, сроков и динамики, он оказывается на шаг позади линейки Denon. Не в световых годах, а позади.
Тем не менее, если вы цените мощный звук и в целом наслаждаетесь звуковой подписью Yamaha, вам стоит пройти прослушивание.
Прочтите полный обзор: Yamaha RX-A1080
Сводка лучших предложений сегодняшнего дня
Ресивер — Как работает домашний кинотеатр
Аудио / видео (a / v) ресивер и усилитель в сборе в домашнем кинотеатре выполняет ту же работу, что и узел ресивера и усилителя в любой стереосистеме: он принимает сигналы от различные устройства ввода, такие как видеомагнитофон, DVD-плеер или спутниковая антенна.Он интерпретирует и усиливает эти сигналы, а затем отправляет их на устройства вывода — ваш телевизор и звуковую систему.
Узел аудио / видео ресивера и усилителя домашнего кинотеатра фактически состоит из нескольких различных компонентов. Некоторые даже имеют встроенный DVD или другой медиаплеер. Обычно вы можете собрать превосходную систему домашнего кинотеатра, покупая компоненты по отдельности, но большинство людей покупают одно устройство, которое выполняет все эти функции, потому что это более рентабельно.
Компоненты ресивера:
- Аудио / видео входы для источников видеосигнала (DVD-плейер, DVR)
- Предусилитель
- Декодер объемного звука (также известный как процессор сигналов )
- Мощность для каждого звукового канала
- Выходы для динамиков и телевидения
Путь аудио и видео довольно прост.Компонент-источник (DVD-проигрыватель, DVR и т. Д.) Подает сигнал на приемное устройство. Вы выбираете, какой входной компонент вы хотите подать на свой выходной блок, а предварительный усилитель выбирает этот сигнал и немного усиливает его линейный уровень.
Ресивер отправляет видео на ваш телевизор, а звук — на декодер . Декодер сортирует различные звуковые каналы из видеосигнала, а затем отправляет информацию на усилители для каждого вывода звукового канала.Эти усилители подключаются к соответствующему динамику или динамикам.
Цифровые и аналоговые декодеры выполняют свою работу по-разному. Цифровой объемный звук довольно прост: например, когда компания производит программу Dolby Digital ® , они кодируют шесть отдельных аудиоканалов, специально сбалансированных для настройки колонок Dolby Digital. Декодер объемного звука Dolby Digital распознает эти разные каналы и отправляет их на соответствующие динамики.
Аналоговый объемный звук — это совсем другое. Различные аналоговые каналы объемного звука фактически извлекаются из двух стандартных аудиоканалов, составляющих любой обычный стереосигнал. Это обычно называется обработкой 4-2-4 , потому что кодер по существу берет задний и передний каналы и преобразовывает их в обычные стереоканалы, а декодер объемного звука снова разделяет четыре канала.
