Как устроены автоматические выключатели. Какие бывают типы автоматов. Как работает автоматический выключатель при коротком замыкании и перегрузке. Какие преимущества имеют автоматические выключатели перед другими средствами защиты.
Что такое автоматический выключатель и для чего он нужен
Автоматический выключатель (автомат) — это коммутационный аппарат, предназначенный для защиты электрической сети от токов короткого замыкания и токов перегрузки. Он автоматически отключает защищаемую электрическую цепь при возникновении в ней аварийных режимов.
Основные функции автоматического выключателя:
- Защита от коротких замыканий
- Защита от перегрузок
- Ручное включение и отключение электрической цепи
Автоматы широко применяются в бытовых и промышленных электроустановках для защиты кабелей, проводов и электрооборудования от повреждений, вызванных токами короткого замыкания и токами перегрузки.
Устройство автоматического выключателя
Конструкция автоматического выключателя включает следующие основные элементы:
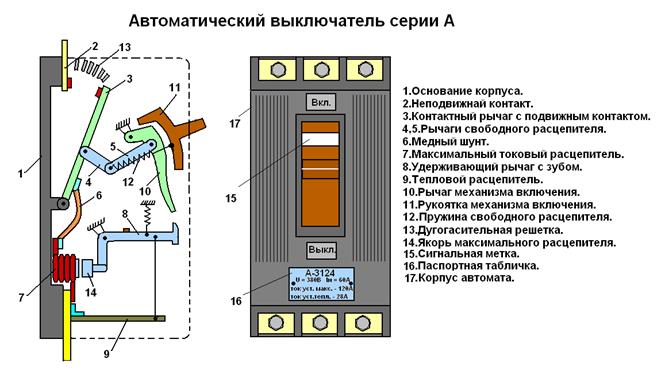
- Корпус
- Контактная система (подвижные и неподвижные контакты)
- Дугогасительная камера
- Механизм свободного расцепления
- Расцепители (электромагнитный и тепловой)
- Привод (рукоятка)
Рассмотрим назначение каждого элемента подробнее:
Корпус
Корпус автомата изготавливается из негорючего изоляционного материала. Он обеспечивает защиту внутренних частей от внешних воздействий и безопасность при эксплуатации.
Контактная система
Состоит из подвижных и неподвижных контактов. Обеспечивает коммутацию электрической цепи. При размыкании контактов происходит гашение электрической дуги.
Дугогасительная камера
Предназначена для быстрого гашения электрической дуги, возникающей при размыкании контактов под нагрузкой. Это повышает отключающую способность автомата.
Механизм свободного расцепления
Обеспечивает быстрое отключение автомата при срабатывании расцепителей, независимо от положения рукоятки управления.
Расцепители
Являются чувствительными элементами автомата. При возникновении аварийного режима воздействуют на механизм свободного расцепления, вызывая отключение.

Привод
Служит для ручного включения и отключения автомата, а также взвода механизма после срабатывания.
Принцип работы автоматического выключателя
Принцип работы автоматического выключателя основан на срабатывании расцепителей при возникновении в защищаемой цепи токов короткого замыкания или перегрузки.
Рассмотрим работу автомата в различных режимах:
Нормальный режим
В нормальном режиме ток протекает через замкнутые контакты автомата. Величина тока не превышает номинального значения.
Режим короткого замыкания
При возникновении короткого замыкания резко возрастает ток в цепи. Это вызывает срабатывание электромагнитного расцепителя:
- Электромагнитный расцепитель создает мощное магнитное поле
- Якорь расцепителя притягивается и воздействует на механизм свободного расцепления
- Происходит мгновенное отключение контактов автомата
- Возникшая электрическая дуга гасится в дугогасительной камере
Режим перегрузки
При длительном превышении током номинального значения срабатывает тепловой расцепитель:

- Биметаллическая пластина нагревается протекающим током
- При достижении порога срабатывания пластина изгибается
- Пластина воздействует на механизм свободного расцепления
- Происходит отключение контактов автомата
Таким образом, автоматический выключатель обеспечивает надежную защиту электрической сети как от токов короткого замыкания, так и от перегрузок.
Типы автоматических выключателей
Автоматические выключатели классифицируются по различным признакам:По числу полюсов:
- Однополюсные — для однофазных цепей
- Двухполюсные — для однофазных цепей с защитой нейтрали
- Трехполюсные — для трехфазных цепей
- Четырехполюсные — для трехфазных цепей с защитой нейтрали
По типу защитной характеристики:
- Тип B — для защиты цепей с небольшими пусковыми токами
- Тип C — для бытовых и промышленных цепей
- Тип D — для цепей с большими пусковыми токами
По отключающей способности:
- 4500 А
- 6000 А
- 10000 А
- 15000 А и выше
Выбор типа автоматического выключателя зависит от параметров защищаемой цепи и характера нагрузки.
Преимущества автоматических выключателей
Автоматические выключатели имеют ряд преимуществ по сравнению с другими средствами защиты электросетей:
- Высокое быстродействие при коротких замыканиях
- Возможность многократного использования
- Наличие ручного управления
- Простота обслуживания
- Компактные размеры
- Высокая надежность
Благодаря этим преимуществам автоматические выключатели являются основным средством защиты в современных электроустановках.
Выбор автоматического выключателя
При выборе автоматического выключателя необходимо учитывать следующие параметры:
- Номинальный ток
- Номинальное напряжение
- Отключающая способность
- Тип защитной характеристики
- Количество полюсов
- Условия эксплуатации
Правильный выбор автоматического выключателя обеспечит надежную защиту электрической сети и подключенного оборудования.
Техническое обслуживание автоматических выключателей
Для обеспечения надежной работы автоматических выключателей необходимо проводить их периодическое техническое обслуживание:
- Внешний осмотр
- Проверка затяжки винтовых соединений
- Проверка работы механизма свободного расцепления
- Измерение сопротивления изоляции
- Проверка срабатывания расцепителей
Своевременное и качественное обслуживание позволит продлить срок службы автоматических выключателей и повысить надежность защиты электроустановок.

Принцип работы автоматических выключателей — Electroff
Автоматический выключатель – коммутационный аппарат, используемый для защиты электрической сети от перегрузок и коротких замыканий.
Изделия делятся на три основных типа:
- Однополюсные – устанавливаются в однофазных сетях;
- Двухполюсные – используются одно- и двухфазных сетях;
- Трехполюсные – для сетей с тремя фазами;
- Четырехполюсные – применяются в трехфазных сетях, оснащенных системой заземления.
Ознакомиться с ассортиментом автоматических выключателей можно в каталоге компании «Электрофф». В продаже представлены надежные и мощные аппараты, способные обеспечить надежную защиту сети от сверхтоков.
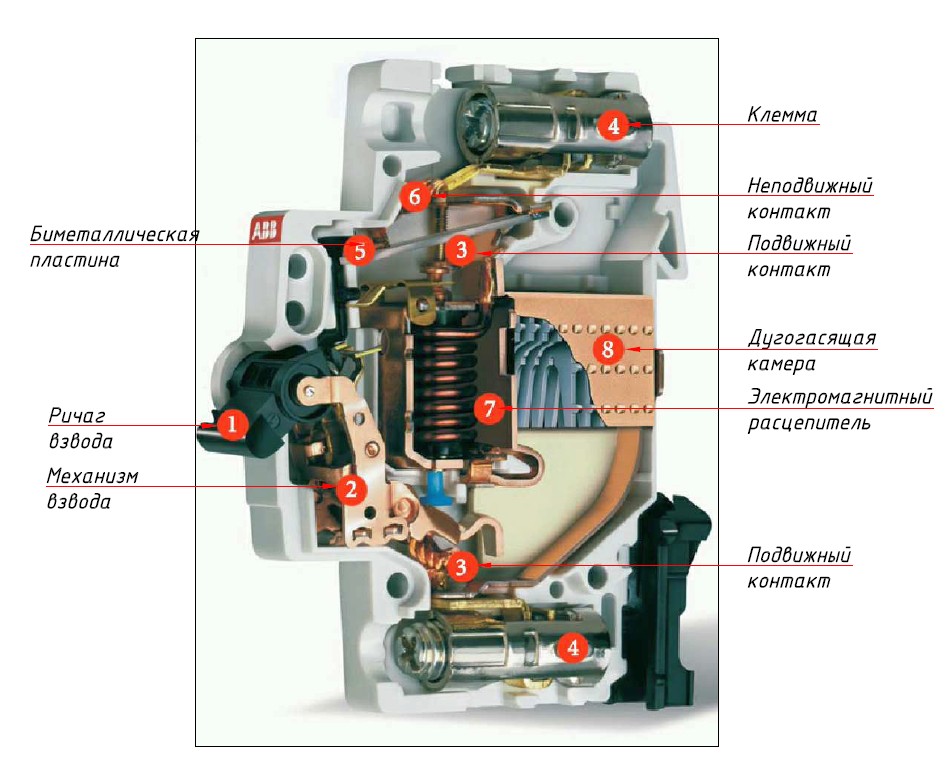
Работа автоматического выключателя в разных режимах осуществляется по следующему принципу:
- Нормальный режим
В процессе взвода рычага управления аппаратом выполнятся передвижение механизма, отвечающего за взвод и расцепление, в результате выполняется коммутация силовых контактов.
После активации коммутации ток проходит от питающего кабеля, который подсоединен к винтовому зажиму. Далее через этот зажим энергия проходит по контактам сначала к неподвижному, а после к подвижному. Затем ток следует через гибкую связь, электромагнитную катушку, снова через биметаллическую пластину и гибкую связь, в конце через фиксационный элемент к отходящей линии, которая осуществляет питание электрического прибора.
- Короткое замыкание
Принцип действия этого режима заключается в мгновенном отключении нагрузки электромагнитным расцепителем в случае возникновения короткого замыкания в цепи. Процесс работы выполняется по следующей схеме:
- Если в сети наблюдается существенное превышение номинального тока, который проходит через электромагнитную обмотку, образуется мощное магнитное поле. В результате магнитный якорь, оснащенный подвижным контактом, оттягивается вниз образованным магнитным полем.
- Якорь при опущении надавливает на рычаг спускового механизма, таким образом, происходит расцепление контактов, то есть прекращается подача тока.
Конструкция срабатывает мгновенно после возникновения короткого замыкания, то есть исключаются нежелательные последствия такой аварии.
Однако не исключатся образование дугового разряда между контактной группой. В таком случае дуга направляется в сторону дугогасительной камеры. При соприкосновении с пластинами происходит расщепление дуги – она проникает в полость камеры, а после затухает. Избыточное давление и образовавшиеся продукты горения выходят наружу через специализированное отверстие в корпусе автоматического выключателя.
- Перегрузка
В аппарате установлен тепловой расцепитель, отвечающий за перегрузки. Принцип работы автоматического выключателя при перегрузках заключается в следующем: в случаях, когда электроэнергия, проходящая через биметаллическую пластину, становится равной или превышает положенное значение, то происходит нагрев пластины, в результате она постепенно меняет форму (изгибается). При достижении определенного угла изгиба, она активирует нажатием на рычажок спусковой механизм, тем самым отключая подачу тока потребителям.
При достижении определенного угла изгиба, она активирует нажатием на рычажок спусковой механизм, тем самым отключая подачу тока потребителям.
Терморасцепитель реагирует медленнее, чем магнитный выключатель. Срабатывание нуждается в большем промежутке времени, однако его легко настроить и отличается высокой точностью.
Принцип работы автомата защиты двигателя
Электродвигатель требует эффективной защиты от перегрузок или коротких замыканий. Одним из возможных средств защиты оказывается автоматический выключатель. Какие у него виды и принцип действия? Почему на самом деле используется моторный выключатель и как выбрать его параметры? К слову, если вас интересует автомат защиты двигателя, то вам нужно посетить данный сайт.
Как мы уже знаем, автоматический выключатель двигателя (или иными словами термовыключатель) — это защитное устройство. Его задачей будет не допустить поломки электродвигателя. Автоматический выключатель отключает подачу электроэнергии в случае короткого замыкания или перегрузки.
Этот тип защиты двигателя должен соответствовать требованиям конкретного устройства. Предложения на продажу включают однофазный автоматический выключатель двигателя и трехфазный выключатель. Далее по тексту мы обсудим типы автоматических выключателей и выбор автоматического выключателя более подробно.
Защита двигателя реагирует на токи перегрузки и короткого замыкания. Они обеспечивают бесперебойную работу устройства только при наличии в цепи номинального тока. Выключатель двигателя обычно используется для ручного выключения и включения защищенного двигателя. Его большим преимуществом является быстрое реагирование и почти немедленное отключение электроэнергии.
Это правда, что большинство электродвигателей можно запустить без использования автоматического выключателя. Однако термистор является важной защитной функцией и защитит устройство в случае, если ток двигателя приобретет нежелательные параметры. Особенно рекомендуется подключать выключатель двигателя в том случае, если для запуска двигателя требуется большая мощность. Также рекомендуется использовать средства защиты двигателей для защиты устройств, работающих в суровых условиях окружающей среды, а также в случае повышенного риска короткого замыкания, перенапряжения или обрыва фазы.
Особенно рекомендуется подключать выключатель двигателя в том случае, если для запуска двигателя требуется большая мощность. Также рекомендуется использовать средства защиты двигателей для защиты устройств, работающих в суровых условиях окружающей среды, а также в случае повышенного риска короткого замыкания, перенапряжения или обрыва фазы.
Термик также реагирует на обрыв фазы в трехфазных сетях. Время ответа очень короткое и измеряется в миллисекундах. Принцип работы устройства оказывается довольно простым. Автоматический выключатель двигателя имеет тепловой расцепитель перегрузки. Его задача — среагировать в случае перегрузки и защитить обмотку двигателя. При обнаружении перегрузки расцепитель немедленно отключает питание.
Принцип действия требует определения понятия перегрузки. Мы предполагаем, что электрическая перегрузка возникает, когда в электрической цепи системы появляется повышенное напряжение (выше номинального тока). Тепловой расцепитель срабатывает почти сразу при обнаружении перегрузки и защищает обмотки двигателя от перегрева.
Второй элемент устройства — электромагнитный триггер, который является защитой двигателя от короткого замыкания. Принцип действия можно объяснить здесь только с учетом явления короткого замыкания. Предположим, что короткое замыкание возникает в цепи при контакте фазного провода с нулевым проводом. Когда это происходит, электромагнитный расцепитель немедленно реагирует, защищая электродвигатель. Он также будет отвечать за защиту двигателя в случае обрыва фазы.
Выключатель защиты двигателя обеспечивает запуск двигателя во всех режимах работы. Выбор автоматического выключателя двигателя требует ознакомления с наиболее важными техническими параметрами.
ЕЩЁ БОЛЬШЕ НОВОСТЕЙ
Принципы работы
а. Основные детали
Все двигатели состоят из двух основных частей:
- СТАТОР (неподвижная часть)
- РОТОР (вращающаяся часть)
Конструкция и изготовление этих двух компонентов определяют классификацию и характеристики двигателя. Дополнительные компоненты (например, щетки, контактные кольца, подшипники, вентиляторы, конденсаторы, центробежные переключатели и т. д.) также могут быть уникальными для конкретного типа двигателя.
Дополнительные компоненты (например, щетки, контактные кольца, подшипники, вентиляторы, конденсаторы, центробежные переключатели и т. д.) также могут быть уникальными для конкретного типа двигателя.
б. Операция
Все двигатели, описанные в этом руководстве, работают на принципе электромагнетизма. Существуют и другие двигатели, работающие на электростатическом и пьезоэлектрическом принципах, но они менее распространены.
В электродвигателях величина силы напрямую зависит от силы магнитного поля и величины тока, протекающего в проводнике (рис. 3-1).
Рисунок 3-1: Сила, действующая на проводник в магнитном поле
F = ILB, где
F — сила (ньютоны)
I — сила тока (амперы)
L — длина (метры)
B — магнитный поток (веберы/м²)
Обычно ротор электродвигателя находится внутри создаваемого магнитного поля по статору. Магнитное поле индуцирует ток внутри ротора, и результирующая сила, вызванная магнитными полями в статоре и роторе (и, следовательно, крутящий момент), заставляет его вращаться.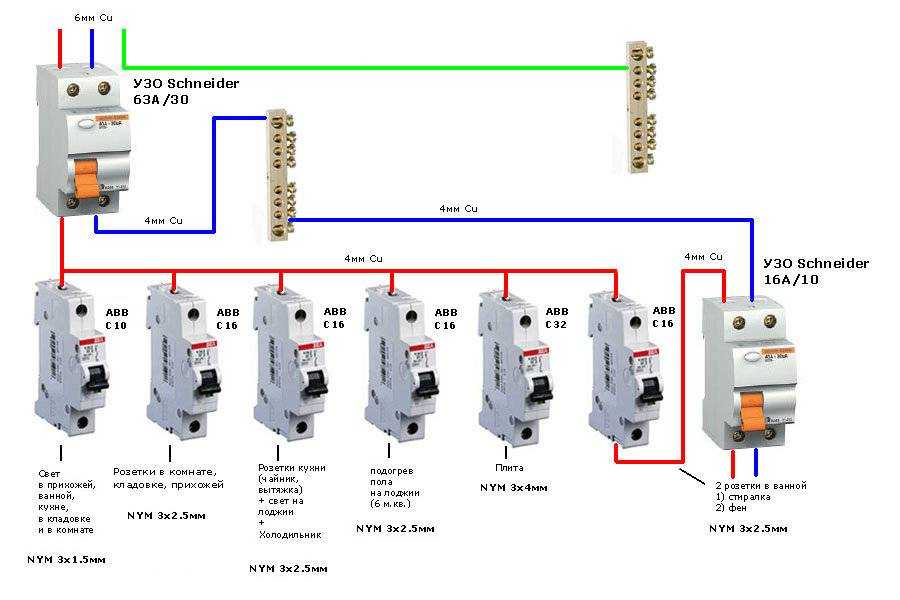
в. Мощность двигателя и крутящий момент
На паспортной табличке электродвигателей указана номинальная механическая мощность либо в лошадиных силах, либо в киловаттах.
Двумя важными факторами, определяющими выходную механическую мощность, являются крутящий момент и скорость.
Крутящий момент — это мера силы, которая стремится произвести вращение. Часто указывается в фунт-футах или ньютон-метрах.
Чтобы лучше понять концепцию крутящего момента, рассмотрим большой гаечный ключ длиной один фут, который используется для откручивания гайки (см. рис. 3-2). Если к концу этого ключа приложить силу 2 фунта, крутящий момент составит 2 фунта-фута. Пока гайка не начнет вращаться, работа фактически не выполняется. Когда гайка действительно начинает вращаться, работа выполняется. Если предположить, что к рукоятке ключа продолжает прикладываться та же сила, мощность, по сути, равна скорости вращения, умноженной на приложенный крутящий момент.
Рисунок 3-2: Пример крутящего момента
Скорость двигателя обычно указывается в оборотах в минуту (об/мин).
Мощность двигателя определяется как скорость вращения двигателя, умноженная на крутящий момент.
Чем медленнее работает двигатель, тем больший крутящий момент он должен развивать, чтобы обеспечить ту же выходную мощность. Чтобы выдерживать больший крутящий момент, низкоскоростным двигателям требуются более прочные компоненты, и они, как правило, крупнее, тяжелее и дороже, чем двигатели с более высокими скоростями той же номинальной мощности.
Иногда понятия крутящий момент и скорость путают с лошадиными силами. Чтобы проиллюстрировать разницу, рассмотрим стартер автомобиля. Этот специальный двигатель рассчитан на высокий крутящий момент, но относительно низкую мощность. Его единственная цель — медленно провернуть двигатель автомобиля, чтобы он завелся. И наоборот, двигатель в маленьком вентиляторе вращается с большой скоростью, но легко останавливается. Последний двигатель производит низкий крутящий момент. Последний пример — двигатель настольной пилы мощностью 3 л.с. Проталкивание куска дерева во вращающееся лезвие почти не замедлит двигатель, поскольку двигатель сочетает в себе скорость и крутящий момент для приложения.
Последний двигатель производит низкий крутящий момент. Последний пример — двигатель настольной пилы мощностью 3 л.с. Проталкивание куска дерева во вращающееся лезвие почти не замедлит двигатель, поскольку двигатель сочетает в себе скорость и крутящий момент для приложения.
д. Моментно-скоростные характеристики двигателей
Крутящий момент, создаваемый двигателем, обычно зависит от скорости.
Каждый тип двигателя имеет свое собственное отношение крутящего момента к скорости, которое при построении графика в виде зависимости крутящего момента от скорости помогает в процессе выбора (Рисунок 3-3).
Рис. 3-3: Типичная диаграмма крутящий момент-скорость
Некоторые важные точки на графике крутящий момент-скорость включают:
- Начальный крутящий момент — крутящий момент, создаваемый при нулевой скорости. Если двигатель должен вращать нагрузку, которую трудно запустить (высокоинерционная нагрузка), следует выбрать двигатель с высоким пусковым моментом.

- Подтягивающий момент — минимальный крутящий момент, создаваемый при разгоне с места до рабочей скорости. Это может иметь решающее значение для приложения, которому требуется питание для преодоления некоторых временных барьеров перед достижением выходного уровня рабочего уровня.
- Пробивной крутящий момент — максимальный крутящий момент, который может создать двигатель перед остановкой.
- Крутящий момент при полной нагрузке (также тормозной момент) — крутящий момент, создаваемый при скорости при полной нагрузке, который дает номинальную мощность двигателя. В этот момент крутящий момент, умноженный на скорость, равен номинальной мощности в лошадиных силах.
Предыдущий: Классификация двигателей | Содержание | Далее: Двигатели переменного тока
Принцип работы электродвигателя — HiSoUR История культуры — Hi So You Are
Электродвигатель — это электромеханический преобразователь (электрическая машина), который преобразует электрическую энергию в механическую. В обычных электродвигателях катушки токонесущих проводников генерируют магнитные поля, силы взаимного притяжения и отталкивания которых реализуются в движении. Таким образом, электродвигатель является аналогом очень похожего по конструкции генератора, который преобразует мощность двигателя в электрическую энергию. Электродвигатели обычно генерируют вращательные движения, но их также можно использовать для создания поступательных движений (линейный привод). Электродвигатели используются для привода многих устройств, машин и транспортных средств.
В обычных электродвигателях катушки токонесущих проводников генерируют магнитные поля, силы взаимного притяжения и отталкивания которых реализуются в движении. Таким образом, электродвигатель является аналогом очень похожего по конструкции генератора, который преобразует мощность двигателя в электрическую энергию. Электродвигатели обычно генерируют вращательные движения, но их также можно использовать для создания поступательных движений (линейный привод). Электродвигатели используются для привода многих устройств, машин и транспортных средств.
Принцип действия
Электродвигатели — это устройства, преобразующие электрическую энергию в механическую. Средством такого преобразования энергии в электродвигателях является магнитное поле. Существуют различные типы электродвигателей, и каждый тип имеет различные компоненты, структура которых определяет взаимодействие электрических и магнитных потоков, вызывающих силу или крутящий момент двигателя.
Фундаментальный принцип заключается в том, что закон Лоренца описывает, как сила возникает в результате взаимодействия точечного электрического заряда q в электрическом и магнитном полях:
где:
q : точечный электрический заряд
E : электрическое поле
v : скорость частицы
B : плотность магнитного поля
В случае чисто электрического поля выражение уравнения сводится к:
сила в этом случае определяется только зарядом q и электрическим полем Е. Именно кулоновская сила действует вдоль проводника, порождающего электрический поток, например, в катушках статора асинхронных машин или в роторе электродвигателей. двигатели постоянного тока.
Именно кулоновская сила действует вдоль проводника, порождающего электрический поток, например, в катушках статора асинхронных машин или в роторе электродвигателей. двигатели постоянного тока.
В случае чисто магнитного поля:
Сила определяется зарядом, плотностью магнитного поля B и скоростью груза v. Эта сила перпендикулярна магнитному полю и направлению скорости Загрузка. Обычно в движении находится много грузов, поэтому удобно переписать выражение через плотность заряда Fv (сила на единицу объема):
Произведение, известное как плотность тока Дж (ампер на квадратный метр):
Тогда полученное выражение описывает силу, возникающую при взаимодействии тока с магнитным полем:
Это основной принцип, который объясняет, как силы возникают в электромеханических системах, таких как электродвигатели. Однако полное описание каждого типа электродвигателя зависит от его компонентов и конструкции.
Линейный двигатель
Линейный двигатель — это, по сути, любой электродвигатель, который был «развернут» таким образом, что вместо создания крутящего момента (вращения) он создает прямолинейную силу по всей своей длине.
Линейные двигатели чаще всего представляют собой асинхронные или шаговые двигатели. Линейные двигатели обычно используются во многих американских горках, где быстрое движение безмоторного вагона контролируется рельсом. Они также используются в поездах на магнитной подвеске, где поезд «летает» над землей. В меньшем масштабе перьевой плоттер HP 7225A эпохи 1978 года использовал два линейных шаговых двигателя для перемещения пера по осям X и Y.
Электромагнетизм
Сила и крутящий момент
Фундаментальная цель подавляющего большинства электродвигателей в мире состоит в электромагнитном индуцировании относительного движения в воздушном зазоре между статором и ротором для создания полезного крутящего момента или линейной силы.
В соответствии с законом силы Лоренца сила проводника обмотки может быть определена просто как:
или, в более общем случае, для проводников любой геометрии:
В наиболее общих подходах к расчету сил в двигателях используются тензоры.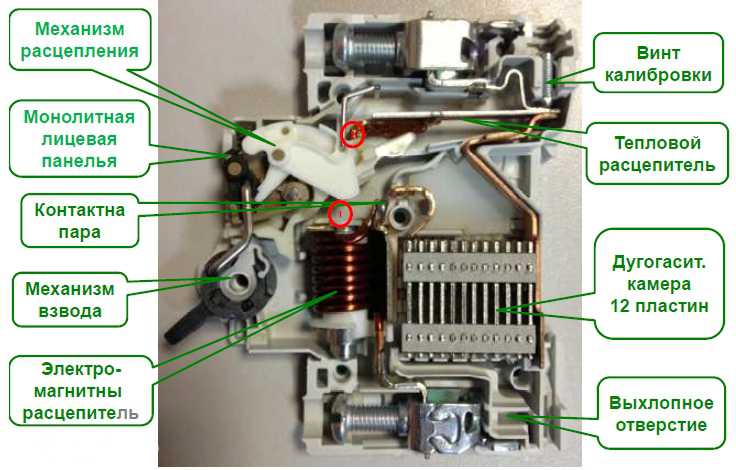
Мощность
Где об/мин — это частота вращения вала, а T — крутящий момент, выходная механическая мощность двигателя Pem определяется формулой,
в британских единицах, где T выражается в футо-фунтах,
(в лошадиных силах) и,
в единицах СИ с угловая скорость вала, выраженная в радианах в секунду, и T, выраженная в ньютон-метрах,
(Вт).
Для линейного двигателя с силой F, выраженной в ньютонах, и скоростью v, выраженной в метрах в секунду,
(ватт).
В асинхронном или асинхронном двигателе зависимость между скоростью двигателя и мощностью воздушного зазора без учета скин-эффекта определяется следующим образом: в роторе
с – проскальзывание двигателя; т. е. разница между синхронной скоростью и скоростью скольжения, которая обеспечивает относительное движение, необходимое для индукции тока в роторе.
Противоэдс
Поскольку обмотки якоря постоянного или универсального двигателя движутся в магнитном поле, в них возникает наведенное напряжение. Это напряжение имеет тенденцию противодействовать напряжению питания двигателя и поэтому называется «противоэлектродвижущей силой (ЭДС)». Напряжение пропорционально скорости вращения двигателя. Противо-ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны равняться напряжению на щетках. Это обеспечивает фундаментальный механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; в результате получается более низкая противо-ЭДС, и от источника питания потребляется больше тока. Этот увеличенный ток обеспечивает дополнительный крутящий момент для балансировки новой нагрузки.
Это напряжение имеет тенденцию противодействовать напряжению питания двигателя и поэтому называется «противоэлектродвижущей силой (ЭДС)». Напряжение пропорционально скорости вращения двигателя. Противо-ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны равняться напряжению на щетках. Это обеспечивает фундаментальный механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; в результате получается более низкая противо-ЭДС, и от источника питания потребляется больше тока. Этот увеличенный ток обеспечивает дополнительный крутящий момент для балансировки новой нагрузки.
В машинах переменного тока иногда полезно учитывать наличие внутри машины источника противо-ЭДС; например, это вызывает особую озабоченность при близком регулировании скорости асинхронных двигателей на частотно-регулируемых приводах.
Потери
Потери двигателя в основном связаны с резистивными потерями в обмотках, потерями в сердечнике и механическими потерями в подшипниках, а также имеют место аэродинамические потери, особенно при наличии охлаждающих вентиляторов.
Потери также возникают при коммутации, искровых механических коммутаторах и электронных коммутаторах, а также рассеивают тепло.
КПД
Для расчета КПД двигателя механическая выходная мощность делится на входную электрическую мощность:
,
где КПД преобразования энергии, электрическая входная мощность и механическая выходная мощность:
где входная мощность напряжение, входной ток, T выходной крутящий момент и выходная угловая скорость. Аналитически можно вывести точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента срыва.
Различные регулирующие органы во многих странах ввели и внедрили законодательство, поощряющее производство и использование электродвигателей с более высоким КПД.
Коэффициент качества
Эрик Лейтуэйт предложил показатель для определения «качества» электродвигателя: и электрической цепи
— длины магнитной и электрической цепи
— магнитная проницаемость сердечника.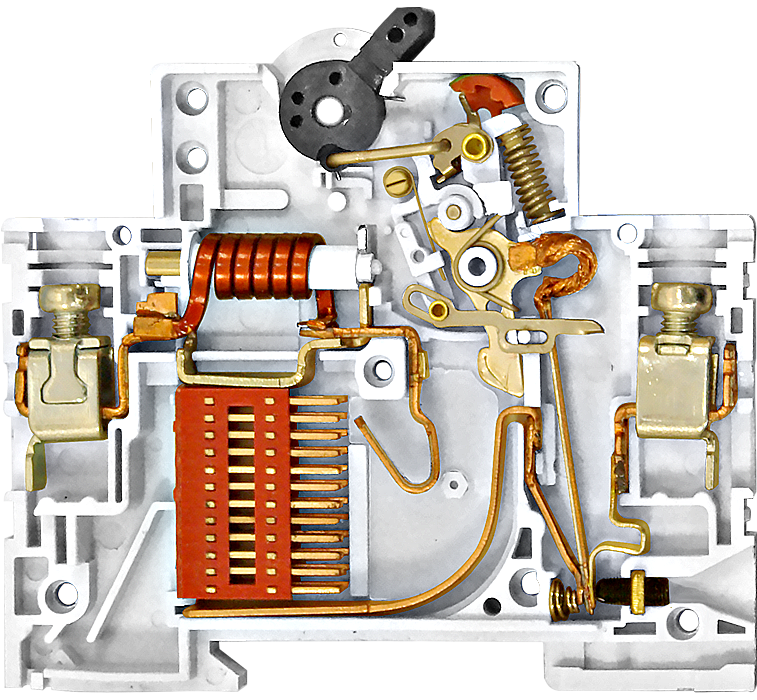
— угловая частота, с которой работает двигатель.
Из этого он показал, что наиболее эффективные двигатели, вероятно, имеют относительно большие магнитные полюса. Однако уравнение напрямую относится только к двигателям без постоянных магнитов.
Рабочие параметры
Крутящий момент типов двигателей
Все электромагнитные двигатели, включая упомянутые здесь типы, получают крутящий момент из векторного произведения взаимодействующих полей. Для расчета крутящего момента необходимо знать поля в воздушном зазоре. После того, как они будут установлены с помощью математического анализа с использованием FEA или других инструментов, крутящий момент может быть рассчитан как интеграл всех векторов силы, умноженный на радиус каждого вектора. Ток, протекающий по обмотке, создает поля, а для двигателя, использующего магнитный материал, поле не линейно пропорционально току. Это усложняет вычисления, но компьютер может выполнить многие необходимые расчеты.
Как только это будет сделано, соотношение тока к крутящему моменту можно использовать в качестве полезного параметра для выбора двигателя.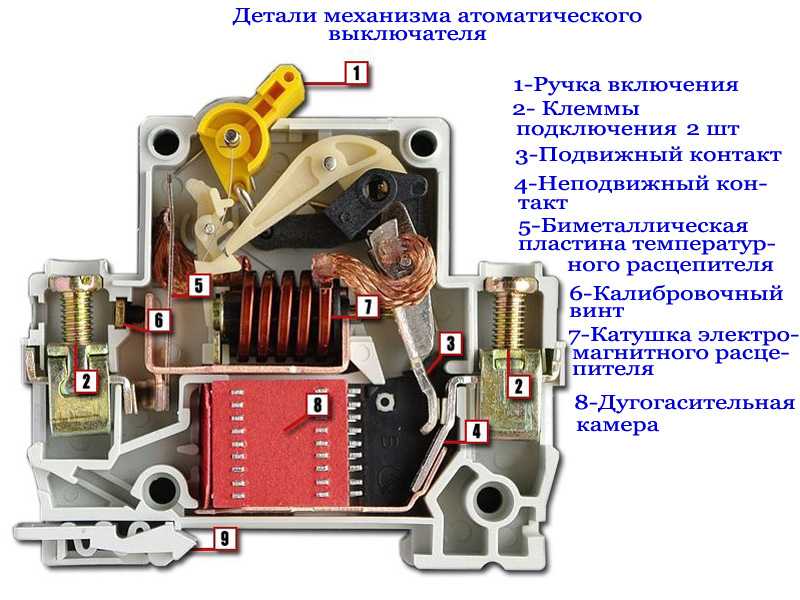 Максимальный крутящий момент для двигателя будет зависеть от максимального тока, хотя обычно его можно использовать только до тех пор, пока тепловые соображения не станут приоритетными.
Максимальный крутящий момент для двигателя будет зависеть от максимального тока, хотя обычно его можно использовать только до тех пор, пока тепловые соображения не станут приоритетными.
При оптимальном расчете с заданным ограничением насыщения сердечника и заданным активным током (т. е. моментным током), напряжением, числом пар полюсов, частотой возбуждения (т. е. синхронной скоростью) и плотностью потока в воздушном зазоре электродвигатели или генераторы будут демонстрировать практически одинаковый максимальный непрерывный крутящий момент на валу (т. Е. Рабочий крутящий момент) в пределах заданной площади воздушного зазора с пазами обмотки и глубиной заднего сердечника, которая определяет физический размер электромагнитного сердечника. В некоторых приложениях требуются всплески крутящего момента, превышающие максимальный рабочий крутящий момент, например, короткие всплески крутящего момента для ускорения электромобиля с места. Всегда ограниченная насыщением магнитного сердечника или безопасным повышением рабочей температуры и напряжения, способность к скачкам крутящего момента сверх максимального рабочего крутящего момента значительно различается между категориями электродвигателей или генераторов.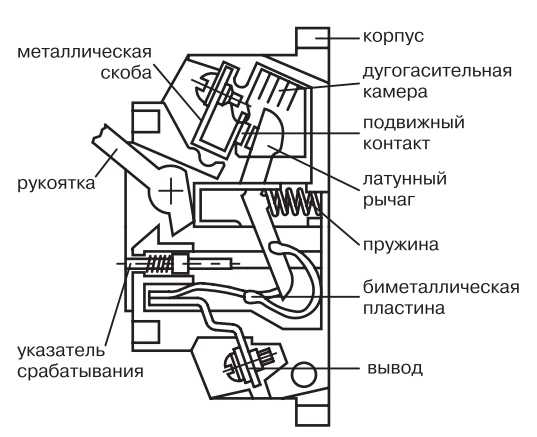
Способность к вспышкам крутящего момента не следует путать со способностью ослабления поля. Ослабление поля позволяет электрической машине работать за пределами расчетной частоты возбуждения. Ослабление поля выполняется, когда максимальная скорость не может быть достигнута за счет увеличения приложенного напряжения. Это относится только к двигателям с управляемыми по току полями и поэтому не может быть достигнуто с двигателями с постоянными магнитами.
Электрические машины без топологии цепи трансформатора, такие как WRSM или PMSM, не могут реализовать всплески крутящего момента, превышающие максимально расчетный крутящий момент, без насыщения магнитного сердечника и превращения любого увеличения тока в бесполезное. Кроме того, узел постоянного магнита СДПМ может быть непоправимо поврежден, если будут предприняты попытки броска крутящего момента, превышающего максимальный номинальный рабочий крутящий момент.
Электрические машины с топологией схемы трансформатора, такие как асинхронные машины, асинхронные электрические машины с двойным питанием и асинхронные или синхронные машины с двойным питанием с фазным ротором (WRDF), демонстрируют очень высокие всплески крутящего момента, поскольку активный ток, индуцированный ЭДС по обе стороны трансформатора противостоят друг другу и, таким образом, не вносят никакого вклада в плотность потока магнитного сердечника, связанного с трансформатором, что в противном случае привело бы к насыщению сердечника.
Электрические машины, работающие на индукционных или асинхронных принципах, закорачивают один порт цепи трансформатора, в результате чего реактивное сопротивление цепи трансформатора становится преобладающим по мере увеличения скольжения, что ограничивает величину активного (т. е. действительного) тока . Тем не менее, возможны всплески крутящего момента, в два-три раза превышающие максимальный расчетный крутящий момент.
Бесщеточная синхронная машина с двойным питанием и фазным ротором (BWRSDF) — единственная электрическая машина с действительно двухпортовой топологией схемы трансформатора (т. е. оба порта возбуждаются независимо, без короткозамкнутого порта). Известно, что топология схемы трансформатора с двумя портами нестабильна и требует сборки многофазного токосъемного кольца и щетки для передачи ограниченной мощности на набор обмоток ротора. Если бы были доступны прецизионные средства для мгновенного управления углом крутящего момента и скольжением для синхронной работы во время работы двигателя или генерации, одновременно обеспечивая бесщеточную мощность для набора обмоток ротора, активный ток машины BWRSDF не зависел бы от реактивного сопротивления цепи трансформатора и возможны всплески крутящего момента, значительно превышающие максимальный рабочий крутящий момент и выходящие далеко за пределы практических возможностей любого другого типа электрической машины. Были рассчитаны скачки крутящего момента, превышающие восьмикратный рабочий крутящий момент.
Были рассчитаны скачки крутящего момента, превышающие восьмикратный рабочий крутящий момент.
Непрерывная плотность крутящего момента
Непрерывная плотность крутящего момента обычных электрических машин определяется размером площади воздушного зазора и глубиной сердечника, которые определяются номинальной мощностью набора обмоток якоря, скоростью машины , и достижимая плотность потока в воздушном зазоре до насыщения сердечника. Несмотря на высокую коэрцитивную силу неодимовых или самариево-кобальтовых постоянных магнитов, плотность непрерывного крутящего момента практически одинакова среди электрических машин с оптимально спроектированными наборами обмоток якоря. Постоянная плотность крутящего момента зависит от способа охлаждения и допустимого периода работы до разрушения из-за перегрева обмоток или повреждения постоянного магнита.
Другие источники утверждают, что различные топологии электронных машин имеют разную плотность крутящего момента. Один источник показывает следующее:
| Тип электрической машины | Удельная плотность крутящего момента (Нм/кг) |
|---|---|
| SPM — бесщеточный, переменный ток, проводимость тока 180° | 1,0 |
| SPM — бесщеточный, переменный ток, проводимость тока 120° | 0,9-1,15 |
| АД, асинхронная машина | 0,7-1,0 |
| IPM, внутренняя машина с постоянными магнитами | 0,6-0,8 |
| VRM, рефлекторная машина с двойной явностью | 0,7-1,0 |
где — удельная плотность крутящего момента приведена к 1,0 для СЗМ — бесщеточный переменный ток, проводимость тока 180°, СЗМ — машина с поверхностными постоянными магнитами.
Плотность крутящего момента примерно в четыре раза больше у электродвигателей с жидкостным охлаждением по сравнению с двигателями с воздушным охлаждением.
Источник, сравнивающий двигатели постоянного тока (DC), асинхронные двигатели (IM), синхронные двигатели с постоянными магнитами (PMSM) и вентильные реактивные двигатели (SRM), показал:
| Характеристика | постоянный ток | ИМ | ПСММ | СРМ |
|---|---|---|---|---|
| Плотность крутящего момента | 3 | 3,5 | 5 | 4 |
| Плотность мощности | 3 | 4 | 5 | 3,5 |
Другой источник отмечает, что синхронные машины с постоянными магнитами мощностью до 1 МВт имеют значительно более высокую плотность крутящего момента, чем асинхронные машины.
Непрерывная удельная мощность
Непрерывная удельная мощность определяется произведением непрерывной плотности крутящего момента и диапазона скоростей постоянного крутящего момента электрической машины.
Специальные магнитные двигатели
Вращающиеся
Двигатель с ротором без железа или без сердечника
Принцип работы любого из описанных выше двигателей не требует, чтобы железные (стальные) части ротора действительно вращались. Если магнитомягкий материал ротора выполнен в виде цилиндра, то (за исключением эффекта гистерезиса) крутящий момент действует только на обмотки электромагнитов. Преимущество этого факта заключается в двигателе постоянного тока без сердечника или железа, специальной форме двигателя постоянного тока с постоянными магнитами. Эти двигатели, оптимизированные для быстрого ускорения, имеют ротор без железного сердечника. Ротор может иметь форму заполненного обмоткой цилиндра или самонесущей конструкции, состоящей только из магнитной проволоки и связующего материала. Ротор может поместиться внутри магнитов статора; магнитомягкий стационарный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Во втором варианте корзина обмотки ротора окружает магниты статора. В этой конструкции ротор помещается внутри магнитно-мягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для потока.
В этой конструкции ротор помещается внутри магнитно-мягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для потока.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, образованный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее одной мс. Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая действовала бы как радиатор, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом. Перегрев может быть проблемой для двигателей постоянного тока без сердечника. Современное программное обеспечение, такое как Motor-CAD, может помочь повысить тепловую эффективность двигателей еще на стадии проектирования.
Среди этих типов есть типы с дисковым ротором, более подробно описанные в следующем разделе.
Вибрационный сигнал сотовых телефонов иногда генерируется крошечными цилиндрическими типами полей с постоянными магнитами, но существуют также типы в форме дисков, которые имеют тонкий мультиполярный дисковый магнит и преднамеренно несбалансированную конструкцию ротора из литого пластика с двумя связанными без сердечника катушки. Металлические щетки и плоский коммутатор переключают питание на катушки ротора.
Металлические щетки и плоский коммутатор переключают питание на катушки ротора.
Соответствующие приводы с ограниченным ходом не имеют сердечника и имеют связанную катушку, расположенную между полюсами тонких постоянных магнитов с высоким магнитным потоком. Это быстрые позиционеры головок для жестких дисков («жестких дисков»). Хотя современная конструкция значительно отличается от конструкции громкоговорителей, ее до сих пор вольно (и неправильно) называют структурой «звуковой катушки», потому что некоторые более ранние головки с жесткими дисками двигались по прямым линиям и имели структуру привода, очень похожую на что из громкоговорителя.
Блинчатый или осевой роторный двигатель
Печатный якорь или блинчатый двигатель имеют обмотки в форме диска, проходящего между массивами магнитов с высоким магнитным потоком. Магниты расположены по кругу, обращенному к ротору, с промежутком между ними, образуя осевой воздушный зазор. Эта конструкция широко известна как двигатель-блинчик из-за ее плоского профиля.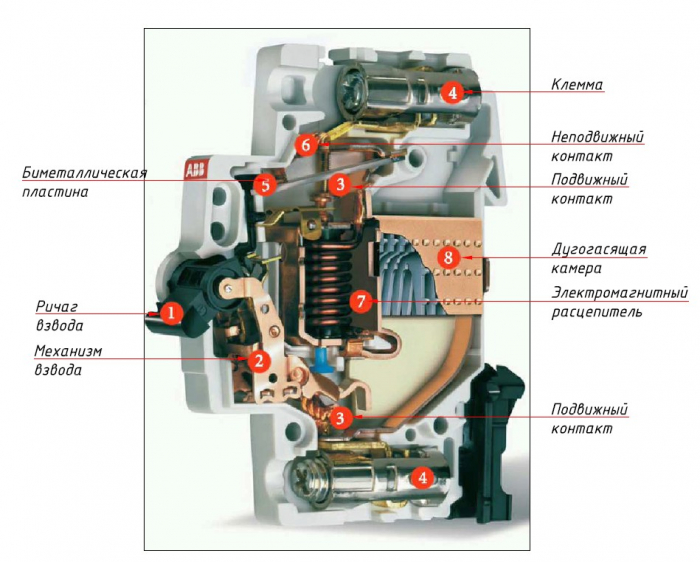 С момента своего появления у этой технологии было много торговых марок, таких как ServoDisc.
С момента своего появления у этой технологии было много торговых марок, таких как ServoDisc.
Печатный якорь (первоначально сформированный на печатной плате) в двигателе с печатным якорем изготавливается из перфорированных медных листов, которые ламинируются вместе с использованием передовых композитов для образования тонкого жесткого диска. Печатный якорь имеет уникальную конструкцию в мире щеточных двигателей, поскольку он не имеет отдельного кольцевого коммутатора. Щетки движутся непосредственно по поверхности арматуры, что делает всю конструкцию очень компактной.
Альтернативный метод изготовления заключается в использовании намотанной медной проволоки, уложенной плоско с центральным обычным коммутатором в форме цветка и лепестка. Обмотки обычно стабилизируются электрическими системами заливки эпоксидной смолой. Это наполненные эпоксидные смолы с умеренной смешанной вязкостью и длительным временем гелеобразования. Они выделяются низкой усадкой и низким экзотермическим эффектом и обычно признаются UL 1446 как герметик с изоляцией до 180 ° C, рейтинг класса H.
Уникальным преимуществом двигателей постоянного тока без сердечника является отсутствие заедания (изменения крутящего момента, вызванные изменением силы притяжения между железом и магнитами). В роторе не могут образовываться паразитные вихревые токи, так как он полностью безжелезный, хотя железные роторы ламинированы. Это может значительно повысить эффективность, но контроллеры с регулируемой скоростью должны использовать более высокую скорость переключения (> 40 кГц) или постоянный ток из-за снижения электромагнитной индукции.
Эти двигатели изначально были изобретены для привода шпиля(ов) магнитных ленточных накопителей, где критически важными были минимальное время для достижения рабочей скорости и минимальный тормозной путь. Блинчатые двигатели широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах, промышленной автоматизации и медицинских устройствах. Из-за разнообразия конструкций, доступных в настоящее время, технология используется в приложениях от высокотемпературных военных до недорогих насосов и базовых сервоприводов.
Другой подход (Magnax) заключается в использовании одного статора, помещенного между двумя роторами. Одна такая конструкция обеспечивает пиковую мощность 15 кВт/кг, устойчивую мощность около 7,5 кВт/кг. Этот двигатель с осевым магнитным потоком без ярма предлагает более короткий путь магнитного потока, удерживая магниты дальше от оси. Конструкция позволяет иметь нулевой выступ обмотки; 100 процентов обмоток активны. Это усиливается за счет использования медного провода прямоугольного сечения. Двигатели могут быть соединены друг с другом для параллельной работы. Нестабильность сводится к минимуму за счет того, что два диска ротора прилагают равные и противоположные силы к диску статора. Роторы соединены непосредственно друг с другом через кольцо вала, компенсируя магнитные силы.
Двигатели Magnax имеют диаметр от 15 до 5,4 метра (от 5,9 до 17 футов 8,6 дюйма).
Серводвигатель
Серводвигатель — это двигатель, очень часто продаваемый в виде законченного модуля, который используется в системе управления положением или скоростью с обратной связью. Серводвигатели используются в таких приложениях, как станки, плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизмах, должны иметь хорошо задокументированные характеристики скорости, крутящего момента и мощности. Кривая зависимости скорости от крутящего момента очень важна и имеет большое значение для серводвигателя. Динамические характеристики отклика, такие как индуктивность обмотки и инерция ротора, также важны; эти факторы ограничивают общую производительность контура сервомеханизма. В больших, мощных, но медленно реагирующих контурах сервопривода могут использоваться обычные двигатели переменного или постоянного тока и приводные системы с обратной связью по положению или скорости двигателя. По мере увеличения требований к динамическому отклику используются более специализированные конструкции двигателей, такие как двигатели без сердечника. Превосходные характеристики плотности мощности и ускорения двигателей переменного тока по сравнению с двигателями постоянного тока, как правило, отдают предпочтение синхронным приводам с постоянными магнитами, BLDC, индукционным и SRM-приводам.
Серводвигатели используются в таких приложениях, как станки, плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизмах, должны иметь хорошо задокументированные характеристики скорости, крутящего момента и мощности. Кривая зависимости скорости от крутящего момента очень важна и имеет большое значение для серводвигателя. Динамические характеристики отклика, такие как индуктивность обмотки и инерция ротора, также важны; эти факторы ограничивают общую производительность контура сервомеханизма. В больших, мощных, но медленно реагирующих контурах сервопривода могут использоваться обычные двигатели переменного или постоянного тока и приводные системы с обратной связью по положению или скорости двигателя. По мере увеличения требований к динамическому отклику используются более специализированные конструкции двигателей, такие как двигатели без сердечника. Превосходные характеристики плотности мощности и ускорения двигателей переменного тока по сравнению с двигателями постоянного тока, как правило, отдают предпочтение синхронным приводам с постоянными магнитами, BLDC, индукционным и SRM-приводам.
Сервосистема отличается от некоторых приложений с шаговым двигателем тем, что обратная связь по положению непрерывна во время работы двигателя. Шаговая система по своей сути работает с разомкнутым контуром, полагаясь на то, что двигатель не «пропускает шаги» для краткосрочной точности, а любая обратная связь, такая как «домой» переключатель или энкодер положения, является внешней по отношению к системе двигателя. Например, когда типичный матричный компьютерный принтер запускается, его контроллер заставляет шаговый двигатель печатающей головки двигаться до его левого предела, где датчик положения определяет исходное положение и прекращает шаг. Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Шаговый двигатель
Шаговые двигатели часто используются, когда требуется точное вращение. В шаговом двигателе внутренний ротор, содержащий постоянные магниты, или магнитно-мягкий ротор с явно выраженными полюсами управляется набором внешних магнитов, которые переключаются электронным способом.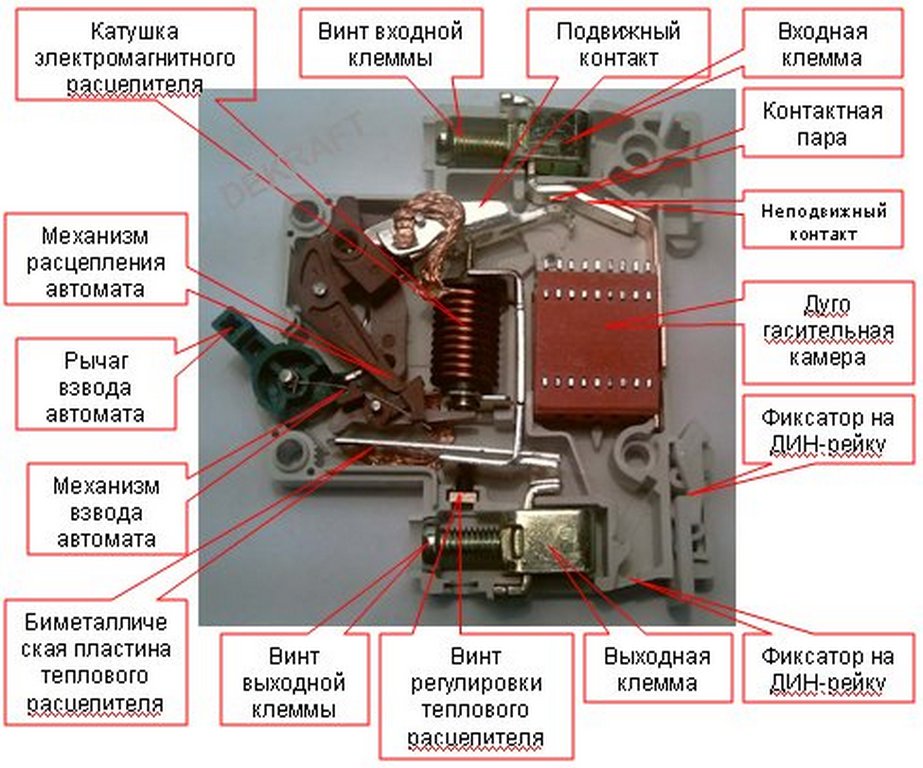 Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и вращающимся соленоидом. Поскольку на каждую катушку по очереди подается питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением. В отличие от синхронного двигателя, шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» — запускается, а затем снова быстро останавливается — от одного положения к другому, поскольку обмотки возбуждения последовательно включаются и обесточиваются. В зависимости от последовательности ротор может вращаться вперед или назад, а также в любое время произвольно менять направление, останавливаться, ускоряться или замедляться.
Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и вращающимся соленоидом. Поскольку на каждую катушку по очереди подается питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением. В отличие от синхронного двигателя, шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» — запускается, а затем снова быстро останавливается — от одного положения к другому, поскольку обмотки возбуждения последовательно включаются и обесточиваются. В зависимости от последовательности ротор может вращаться вперед или назад, а также в любое время произвольно менять направление, останавливаться, ускоряться или замедляться.
Простые драйверы шагового двигателя полностью запитывают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатому» ограниченному числу положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться между точками зубчатых колес и, таким образом, вращаться очень плавно.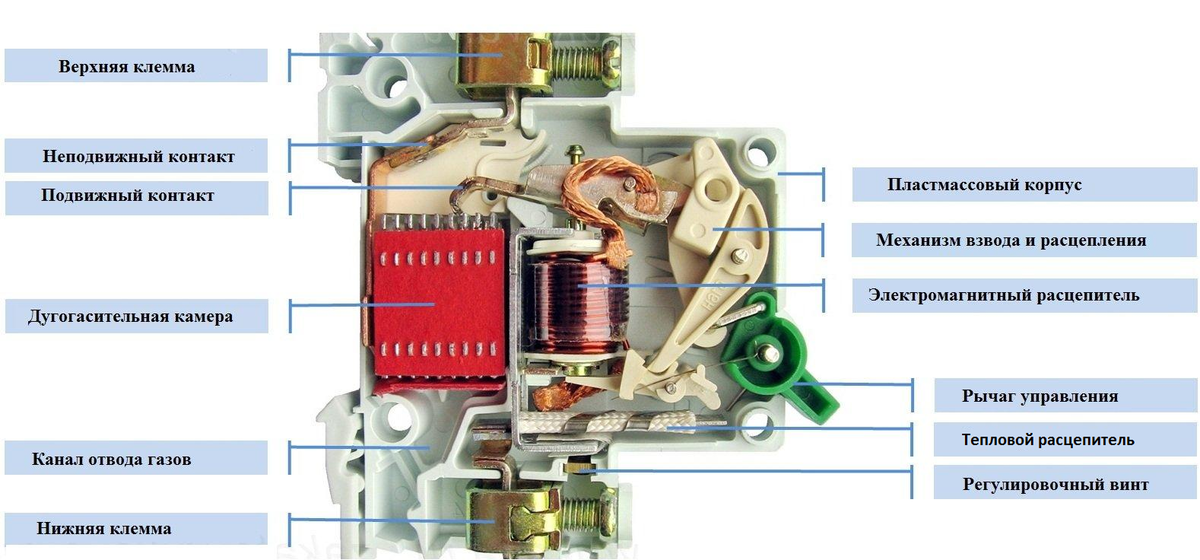 Этот режим работы часто называют микрошагом. Шаговые двигатели, управляемые компьютером, являются одной из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Этот режим работы часто называют микрошагом. Шаговые двигатели, управляемые компьютером, являются одной из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Шаговые двигатели можно легко поворачивать на определенный угол дискретными шагами, поэтому шаговые двигатели используются для позиционирования головок чтения/записи в компьютерных дисководах для гибких дисков. Они использовались с той же целью в компьютерных дисководах до гигабайтной эры, где предлагаемая ими точность и скорость были достаточными для правильного позиционирования головки чтения / записи жесткого диска. По мере увеличения плотности дисков ограничения точности и скорости шаговых двигателей сделали их устаревшими для жестких дисков — ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными — поэтому в новых жестких дисках используются системы привода головки на основе звуковой катушки. (Термин «звуковая катушка» в этой связи является историческим; он относится к структуре типичного (конического) громкоговорителя. Эта конструкция некоторое время использовалась для позиционирования головок. Современные приводы имеют поворотное крепление катушки; катушка качается. вперед-назад, что-то вроде лопасти вращающегося вентилятора. Тем не менее, подобно звуковой катушке, проводники катушки современного исполнительного механизма (магнитопровод) движутся перпендикулярно магнитным силовым линиям.)
(Термин «звуковая катушка» в этой связи является историческим; он относится к структуре типичного (конического) громкоговорителя. Эта конструкция некоторое время использовалась для позиционирования головок. Современные приводы имеют поворотное крепление катушки; катушка качается. вперед-назад, что-то вроде лопасти вращающегося вентилятора. Тем не менее, подобно звуковой катушке, проводники катушки современного исполнительного механизма (магнитопровод) движутся перпендикулярно магнитным силовым линиям.)
Шаговые двигатели использовались и до сих пор часто используются в компьютерных принтерах, оптических сканерах и цифровых копировальных аппаратах для перемещения оптического сканирующего элемента, каретки печатающей головки (матричных и струйных принтеров), валика или подающих роликов. Точно так же многие компьютерные плоттеры (которые с начала 1990-х годов были заменены широкоформатными струйными и лазерными принтерами) использовали роторные шаговые двигатели для движения пера и валика; типичными альтернативами здесь были либо линейные шаговые двигатели, либо серводвигатели с аналоговыми системами управления с обратной связью.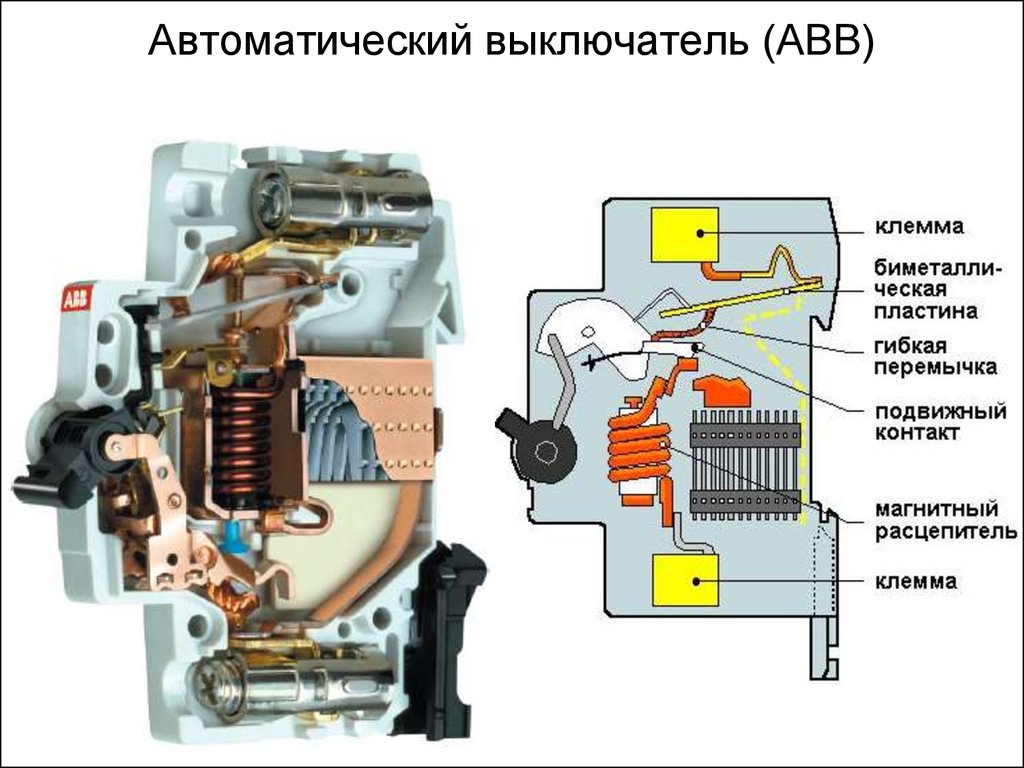
Так называемые кварцевые аналоговые наручные часы содержат самые маленькие обычные шаговые двигатели; они имеют одну катушку, потребляют очень мало энергии и имеют ротор с постоянными магнитами. Такой же двигатель приводит в действие кварцевые часы с батарейным питанием. Некоторые из этих часов, например хронографы, содержат более одного шагового двигателя.
Тесно связанные по конструкции с трехфазными синхронными двигателями переменного тока, шаговые двигатели и SRM классифицируются как двигатель с переменным сопротивлением. Шаговые двигатели использовались и до сих пор часто используются в компьютерных принтерах, оптических сканерах и станках с числовым программным управлением (ЧПУ), таких как маршрутизаторы, плазменные резаки и токарные станки с ЧПУ.
Немагнитные двигатели
Электростатический двигатель основан на притяжении и отталкивании электрического заряда. Обычно электростатические двигатели являются двойными по сравнению с обычными двигателями на основе катушек. Обычно им требуется источник питания высокого напряжения, хотя очень маленькие двигатели используют более низкое напряжение. Обычные электродвигатели вместо этого используют магнитное притяжение и отталкивание и требуют высокого тока при низком напряжении. В 1750-х годах Бенджамином Франклином и Эндрю Гордоном были разработаны первые электростатические двигатели. Сегодня электростатический двигатель находит частое применение в микроэлектромеханических системах (МЭМС), где их управляющие напряжения ниже 100 вольт, а движущиеся заряженные пластины изготовить гораздо проще, чем катушки и железные сердечники. Кроме того, молекулярный механизм, управляющий живыми клетками, часто основан на линейных и вращающихся электростатических двигателях.
Обычно им требуется источник питания высокого напряжения, хотя очень маленькие двигатели используют более низкое напряжение. Обычные электродвигатели вместо этого используют магнитное притяжение и отталкивание и требуют высокого тока при низком напряжении. В 1750-х годах Бенджамином Франклином и Эндрю Гордоном были разработаны первые электростатические двигатели. Сегодня электростатический двигатель находит частое применение в микроэлектромеханических системах (МЭМС), где их управляющие напряжения ниже 100 вольт, а движущиеся заряженные пластины изготовить гораздо проще, чем катушки и железные сердечники. Кроме того, молекулярный механизм, управляющий живыми клетками, часто основан на линейных и вращающихся электростатических двигателях.
Пьезоэлектрический двигатель или пьезодвигатель представляет собой тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля. Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения.
