Как устроено мотор-колесо для электротранспорта. Какие бывают виды мотор-колес. В чем преимущества и недостатки мотор-колес. Как работает система управления мотор-колесом. Перспективы применения мотор-колес в электромобилях.
Что такое мотор-колесо и как оно устроено
Мотор-колесо представляет собой электродвигатель, встроенный непосредственно в колесо транспортного средства. Это ключевой элемент привода многих видов электротранспорта — от электровелосипедов до электромобилей.
Основные компоненты мотор-колеса:
- Электродвигатель (статор и ротор)
- Корпус, совмещенный со ступицей колеса
- Подшипники
- Тормозной механизм
- Датчики положения ротора
Электродвигатель преобразует электрическую энергию в механическую, вращая колесо. Корпус защищает внутренние компоненты и крепится к оси. Подшипники обеспечивают плавное вращение. Тормозной механизм позволяет останавливать колесо. Датчики нужны для точного управления двигателем.
Виды мотор-колес

По типу электродвигателя:
- С бесколлекторным двигателем постоянного тока (BLDC)
- С синхронным двигателем на постоянных магнитах
- С асинхронным двигателем
По наличию редуктора:
- Прямоприводные (безредукторные)
- Редукторные
По месту установки:
- Для переднего колеса
- Для заднего колеса
Выбор типа мотор-колеса зависит от требований к мощности, крутящему моменту, скорости и других параметров конкретного транспортного средства.
Принцип работы мотор-колеса
Как работает мотор-колесо? Принцип его действия основан на взаимодействии магнитных полей статора и ротора электродвигателя:
- На обмотки статора подается электрический ток
- Создается вращающееся магнитное поле статора
- Это поле взаимодействует с магнитным полем ротора
- Возникает крутящий момент, вращающий ротор
- Вращение ротора передается непосредственно на колесо
Управление скоростью и крутящим моментом осуществляется путем регулирования силы тока и частоты его подачи на обмотки статора. Этим занимается специальный контроллер мотор-колеса.
Преимущества использования мотор-колес
Применение мотор-колес в электротранспорте имеет ряд существенных преимуществ:
- Компактность конструкции — двигатель интегрирован в колесо
- Отсутствие трансмиссии — крутящий момент передается напрямую
- Высокий КПД — минимум механических потерь
- Возможность рекуперативного торможения
- Точное управление моментом на каждом колесе
- Упрощение компоновки транспортного средства
Все это позволяет создавать более эффективные и маневренные электрические транспортные средства.
Особенности системы управления мотор-колесом
Для эффективной работы мотор-колеса требуется сложная система управления. Ее ключевые компоненты:
- Контроллер двигателя — управляет подачей тока на обмотки
- Датчики положения ротора — определяют угол поворота
- Датчики тока и напряжения
- Температурные датчики
- Микропроцессор — обрабатывает данные и формирует управляющие сигналы
Система управления обеспечивает плавный разгон и торможение, защиту от перегрузок, оптимальные режимы работы двигателя. В современных решениях применяются алгоритмы векторного управления для максимальной эффективности.
Применение мотор-колес в электромобилях
Использование мотор-колес открывает новые возможности в проектировании электромобилей:
- Индивидуальный привод на каждое колесо
- Точное управление тягой (векторизация крутящего момента)
- Улучшенная управляемость и устойчивость
- Освобождение пространства в кузове
- Упрощение конструкции шасси
Однако есть и сложности — увеличение неподрессоренных масс, проблемы с охлаждением, высокая стоимость. Поэтому массовое внедрение мотор-колес в легковые электромобили пока не произошло.
Перспективы развития технологии мотор-колес
Технология мотор-колес продолжает активно развиваться. Основные направления совершенствования:
- Повышение удельной мощности и крутящего момента
- Снижение массы конструкции
- Улучшение теплоотвода
- Интеграция элементов подвески
- Совершенствование алгоритмов управления
- Снижение стоимости производства
Эксперты прогнозируют, что в ближайшие 5-10 лет мотор-колеса могут получить широкое распространение в электромобилях, особенно в сегменте городского транспорта.

Как сделать мотор колесо своими руками своими руками и какие особенности нужно учитывать
Мотор-колесо (МК) является главным компонентом электрического привода велосипеда. Оно наиболее распространено среди велосипедных электродвигателей, так как позволяет довольно быстро сделать велосипед электрическим — легко устанавливается и подключается. МК подходит для любой рамы велосипеда с эксцентриковым креплением колёс. Поэтому многих интересует вопрос как сделать мотор колесо для велосипеда своими руками.
В статье мы рассмотрим:
-
Что такое мотор колесо?
-
Разновидности мотор-колёс
-
Устройство и принцип действия мотор-колеса
- Как сделать мотор колесо своими руками
Что такое мотор колесо?
Мотор колесо представляет собой колесо, на месте втулки которого расположен мотор. Оно позволяет превратить электрическую энергию аккумулятора в энергию движения транспортного средства. Применяется как в промышленных масштабах при серийном производстве электромобилей, электромотоциклов, так и при изготовлении самодельных электровелосипедов.
Применяется как в промышленных масштабах при серийном производстве электромобилей, электромотоциклов, так и при изготовлении самодельных электровелосипедов.
Разновидности мотор-колёс
Чтобы лучше представлять как сделать мотор колесо своими руками, давайте разберёмся, какие бывают велосипедные мотор-колёса и чем они отличаются:
-
По месту установки — задние и передние. Задние мотор-колеса используются чаще, так как при старте транспортного средства вес переносится на заднее колесо, оно лучше прижимается к дороге и обеспечивает хорошее сцепление. Передние мотор-колеса применяются как сами по себе, так и в составе полноприводных моделей.

-
По наличию редуктора — редукторные и безредукторные (прямого привода). Редукторные мотор-колеса имеют низкий вес (двигатель весит от 1,5 кг), обладают неплохими тяговыми характеристиками и хорошей эффективностью, особенно на низких скоростях. Электровелосипеды с редукторным МК имеют хороший накат. Двигатели мотор-колес прямого привода больше по диаметру и проще по конструкции, из-за чего считаются более надёжными. Кроме этого, они поддерживают рекуперативное торможение, за счёт которого можно подзаряжать аккумулятор. Безредукторные МК чаще применяются на скоростных электробайках, способных разгоняться более 50 км/ч, но и потребление энергии у них выше.
-
По наличию датчиков — с датчиками Холла и без них. Большинство мотор-колес оснащается датчиками скорости и положения ротора (датчики Холла), при этом на двигатель от контроллера идёт кабель с тремя силовыми проводами и 5-6 сигнальными (тонкими). Это можно легко увидеть если посмотреть на разъём двигателя.
Кабели бездатчиковых МК содержат только три силовых провода, и для управления такими мотор-колесами необходимы соответствующие контроллеры.
-
По ширине — для фэтбайков и обычных велосипедов. Мотор-колеса для фэтбайков шире, чем для обычных велосипедов, так как они имеют более широкий обод и соответствующий двигатель.
Кроме этого, мотор-колёса различаются по длине и диаметру оси, размеру обода, толщине спиц, номинальному напряжению, мощности и скорости.
Устройство и принцип действия мотор-колеса
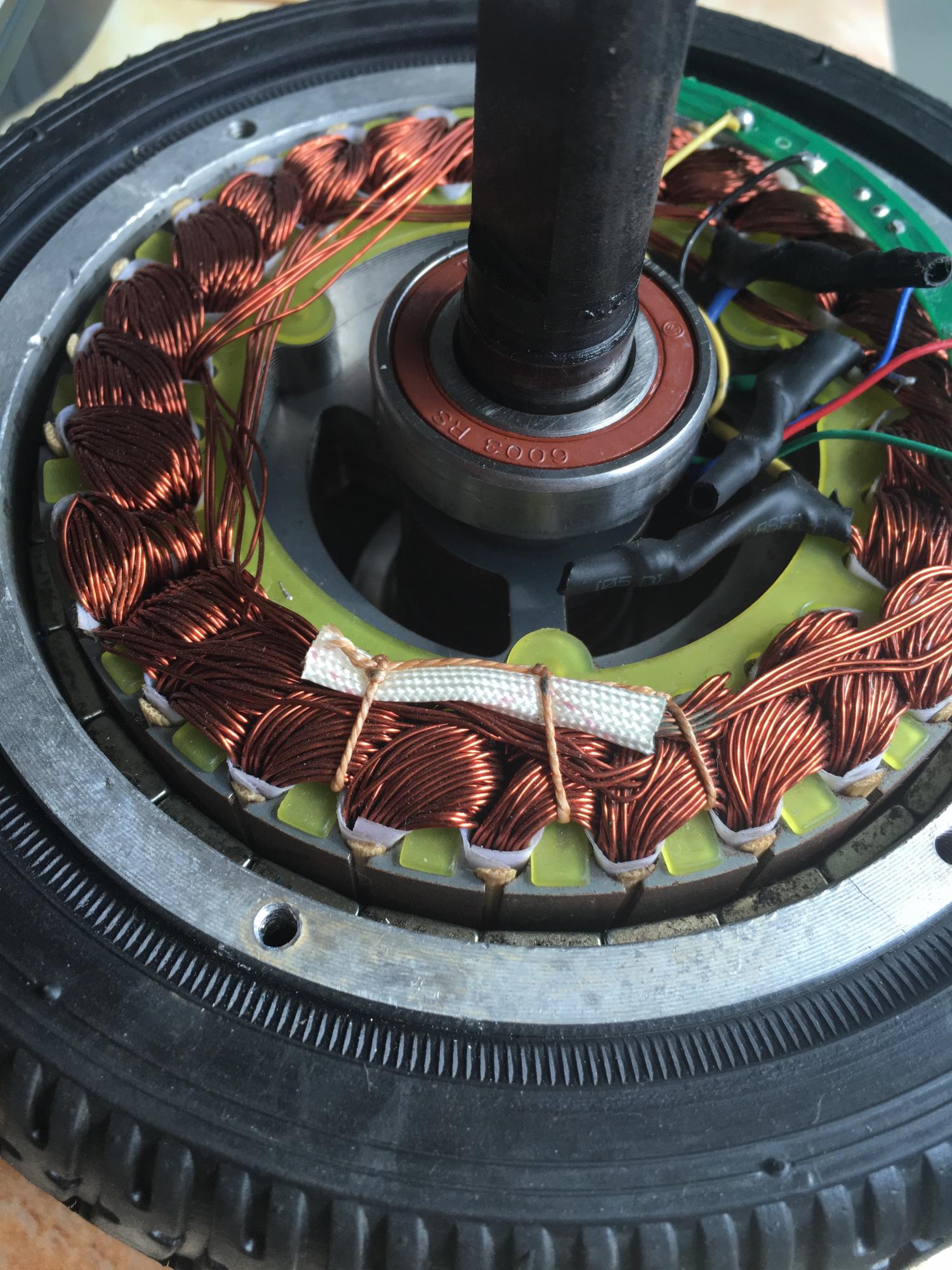
Мотор-колесо представляет собой велосипедный мотор, заспицованый в обод. На корпусе двигателя расположено шесть отверстий для крепления тормозного ротора, а в случае заднего привода также имеется барабан для установки кассеты, из-за чего заднее мотор колесо шире переднего.
Статор электродвигателя содержит обмотки из медной проволоки, на которые поочерёдно подаётся напряжение от контроллера. Обмотки соединены по схеме “звезда” или “треугольник”, в редких случаях эти две схемы совмещаются (как в мотор колесе Дуюнова).
Под действием напряжения создаётся магнитное поле, которое воздействует на магниты ротора, вызывая его вращение. В случае редукторного двигателя вращение передаётся на корпус через редуктор, у безредукторного — напрямую. Редукторы используются как одноступенчатые, так и двухступенчатые, позволяющие добиться более высокого крутящего момента.
На редукторных электродвигателях устанавливается обгонная муфта, поэтому такие мотор колеса могут свободно вращаться, не создавая сопротивление. Этим обеспечивается хороший накат велосипедов с редукторными МК, чем не может похвастаться МК прямого привода.
Как сделать мотор колесо своими руками
Чтобы собрать мотор колесо для велосипеда своими руками, потребуются различные инструменты и навыки, а самое главное — достаточное количество свободного времени и большое желание добиться успешного результата.
Самым простым способом изготовить самодельное мотор-колесо является сборка на базе готового электродвигателя — в этом случае нужно лишь заспицевать мотор в обод.
Более трудоёмким вариантом является приобретение неисправного электродвигателя и его ремонт, который может включать следующие этапы:
-
перетяжка кабеля;
-
замена датчиков Холла;
-
замена обмоток статора;
-
замена или ремонт ротора;
-
замена подшипников;
-
замена шестерней редуктора.
Изготовить электродвигатель для велосипеда с нуля достаточно сложно даже в условиях хорошо оборудованной мастерской, так как для этого потребуются обширные знания и опыт сразу в нескольких областях. Процесс будет выглядеть следующим образом:
-
Проектирование конструкции электродвигателя с моделированием, расчётом магнитных полей и электрических характеристик.
-
Изготовление статора, включающее нарезку и сборку пластин, установку изоляторов, формирование обмоток из медной проволоки;
-
Изготовление ротора (вытачивание вала, нарезка и сборка пластин, установка магнитов, нарезание резьбы на валу электродвигателя).

-
Изготовление редуктора (в случае редукторного двигателя).
-
Изготовление корпуса мотора.
-
Установка подшипников.
-
Протяжка кабеля двигателя.
-
Распайка силовых и сигнальных проводов, подключение датчиков Холла.
-
Окончательная сборка двигателя.
Имея готовый двигатель, остаётся заспицевать его в обод. Для этого необходимо подобрать обод и спицы в соответствии с целями использования самодельного мотор-колеса. Размер обода должен соответствовать размеру колёс велосипеда, а его ширина подбирается в соответствии с типом байка. Для горных велосипедов подходят ободья шириной от 23 мм, а для фэтбайков — 101 мм.
Стоит учесть, что для установки бескамерных покрышек обод должен иметь зацепы. Лучше отдать предпочтение алюминиевым ободьям с двойным профилем, так как мотор весит больше втулки, и нагрузка будет выше. Мощный электродвигатель прямого привода потребует пистонированного обода с усиленными спицами.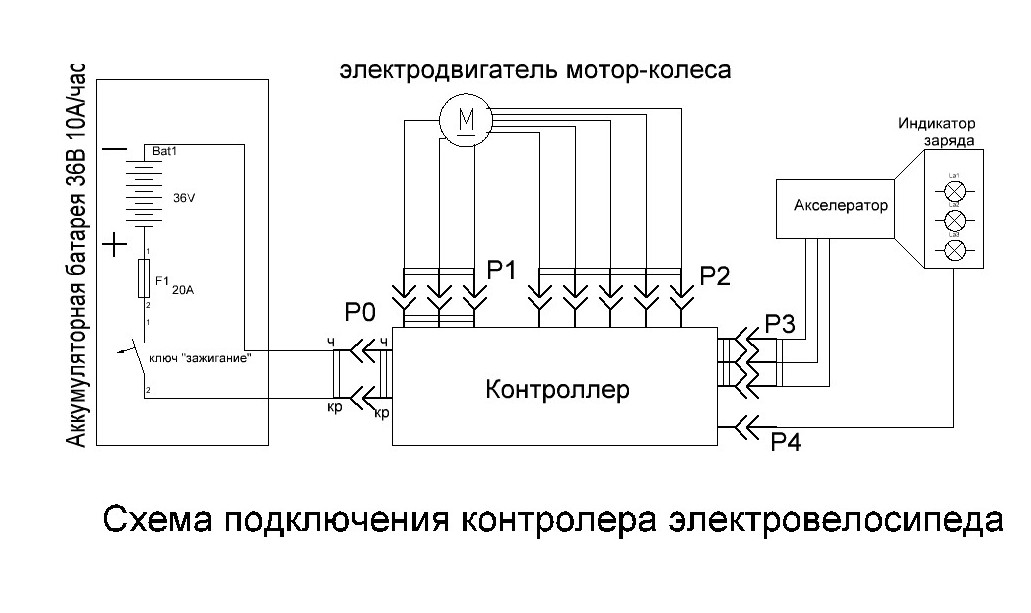
На электрическом двигателе расположены отверстия для спиц, количество которых должно соответствовать количеству отверстий в ободе и количеству самих спиц, а длину последних можно рассчитать при помощи специализированных программ.
Спицовка колеса включает установку спиц, их натяжку, устранение “яйца”, “восьмёрки” и выведение “зонта”. Это довольно длительный и кропотливый процесс, так что торопиться не следует.
Если процесс изготовления самодельного мотор-колеса вас не привлекает, можно приобрести готовый комплект мотор-колесо и установить его на велосипедную раму, либо обратиться в специализированную мастерскую, где оперативно выполнят всю работу и предоставят на неё гарантию. Например, в наш сервисный центр.
Автор статьи: Евгений Бегин
Двигатель дуюнова принцип работы
Усовершенствованный асинхронный двигатель Дуюнова разработан по принципу совмещения обмоток моторов по схеме «Славянка», предусматривающих включение параллельно конфигураций типа «звезда» и «треугольник». Фактически изобретение представляет собой шестифазный двигатель, подключаемый к сети на три фазы.
Фактически изобретение представляет собой шестифазный двигатель, подключаемый к сети на три фазы.
- Как работает?
- Сфера применения
- Особенности
- Как это работает?
- Что говорит о своем изобретении Дуюнов?
В качестве основы изобретения взят медный паяный ротор, в конструкцию которого входит пара электрических колец замкнутого типа и стержни, соединенные между собой методом пайки. Вес всего приспособления понижается посредством обработки верхней части на токарном станке.
Как работает?
Двигатель Дуюнова оснащен новым видом пусковой обмотки, что дает возможность получение высокого стартового эффекта. При этом наблюдается снижение рабочих токов, в том числе и на стандартных силовых агрегатах. Предыдущие попытки по созданию подобной конструкции претерпели неудачу по причине низкого пускового момента и небольшой удельной мощности привычных обмоток. Первому внедрению инновационных технологий подверглось именно заднее мотор-колесо велосипеда.
Приспособление действует по особенной конструктивной и технической схеме. Это связано с объединением стандартных обмоток типа «звезда» и «треугольник» в один блок. Такая конфигурация стала называться «Славянкой» и получила совершенно новые электромеханические возможности.
Сфера применения
Заднее колесо велосипеда, оснащенное рассматриваемым типом двигателя, позволяет увеличить рабочий ресурс техники и упростить ее эксплуатацию. Кроме того, подобные аналоги могут устанавливаться на легковые автомобили, а также военные и специальные машины. По характеристикам, данный силовой агрегат во многом превосходит разработки «Теслы».
Асинхронные двигатели Дуюнова предназначены для техники, которая требует соблюдения повышенных стандартов в плане образования шума и вибрации. Эти параметры удалось существенно снизить, уменьшив акустическое воздействие, вызываемое электромагнитными волнами. Основная обмотка размещается в отсеке, векторы индукции которого образуют 30-градусный угол.
Особенности
Изобретение отличается общей оригинальной схемой, которая позволяет развить скорость до 250 километров в час. Питается установка от вырабатываемого двигателем электричества. Основная часть мотора помещается в колесе, весит 18 килограмм, вырабатывает мощность порядка 35 лошадиных сил. Чтобы получить инерционное действие достаточно одного нажатия. Это дает возможность поддерживать равномерное перемещение транспортного средства в режиме 70-80 км/ч.
Мотор-колесо для самоката относится к электрическому оборудованию, его аналоги применяются в автомобильной и легкой промышленности. Установка может проводиться в начальной комплектации либо после дополнительной модернизации. Такой двигатель в шесть раз весит меньше стандартного 20-киловаттного мотора.
Как это работает?
Применяя мотор-колесо для электротранспорта, мы улучшаем его основные показатели, такие как скорость, крутящий момент и дальность поездки в 2 раза. Конструкция мотор-колеса Дуюнова проста: в ней нет дорогостоящих деталей и материалов, требующих частого обслуживания.
Мотор-колесо Дуюнова превосходит современные электродвигатели по своим характеристикам:
- низкая себестоимость, за счет отказа от использования дорогостоящих магнитов;
- умеренное энергопотребление, благодаря снижению электрических потерь в эксплуатации;
- повышенная мощность двигателя, в связи с высокими пусковым и минимальным моментами вращения;
- малые габариты и легкий вес;
- устойчивость к воздействию внешних физических и климатических условий;
- экологичность в производстве и эксплуатации, связанные с отсутствием необходимости обрабатывать редкоземельные металлы, используемые в аналогах.
Внешний вид мотор-колеса Дуюнова
Что говорит о своем изобретении Дуюнов?
Как утверждает инженер, рассматриваемая конструкция может помещаться в габариты стандартного автомобильного колеса. При этом мощность каждого элемента составит 20 кВт при крутящем моменте мотора 1000 оборотов в минуту. Совокупная мощность составит 80 кВт, что превышает 100 лошадиных сил, а этого вполне достаточно для городского транспортного средства. Масса узла составит всего 18 килограмм, что вполне приемлемо, с учетом отсутствия приводных валов и ступиц, применяемых в стандартной компоновке авто.
Совокупная мощность составит 80 кВт, что превышает 100 лошадиных сил, а этого вполне достаточно для городского транспортного средства. Масса узла составит всего 18 килограмм, что вполне приемлемо, с учетом отсутствия приводных валов и ступиц, применяемых в стандартной компоновке авто.
Прежде всего, повышение мощности двигателя осуществляется за счет увеличения толщины наружной обмотки. В среднем, это 350 мм при 2,5 кВт, а 700 мм хватит для достижения параметра в 20 кВт. Благодаря своевременному патентированию, изобретение защищено от плагиата, хотя попытки обойти этот момент намечаются регулярно.
Понравилась статья? Расскажите друзьям:
Оцените статью, для нас это очень важно:
Проголосовавших: 1 чел.
Средний рейтинг: 5 из 5.
Как работает электровелосипед, принцип работы – Ekobike
Статьи
Категории
Илья Трисветов
25 Марта 2022, Пт
Оглавление
- Принцип работы
- Как работает электровелосипед
- Принцип работы мотор-колеса электровелосипеда
- Устройство контроллера электровелосипеда
Электрические велосипеды успешно конкурируют на рынке со своими механическими аналогами. Оба вида байков внешне мало отличаются, однако по устройству абсолютно различны. И тем, кто собирается приобрести транспортное средство с электромотором, полезно будет узнать, как работает электровелосипед, а также все нюансы данного процесса.
Оба вида байков внешне мало отличаются, однако по устройству абсолютно различны. И тем, кто собирается приобрести транспортное средство с электромотором, полезно будет узнать, как работает электровелосипед, а также все нюансы данного процесса.
Электробайки предусматривают переключение с электрорежима на механический – тогда можно привычным способом крутить педали. Поэтому их ещё называют велогибридами. Но при работе от аккумулятора велосипед развивает более высокую скорость и не требует усилий при управлении. Движение электровелосипеда обеспечивает электрический привод, благодаря которому можно легко преодолевать большие расстояния, не буксуя при этом на крутых подъёмах и неровных дорогах.
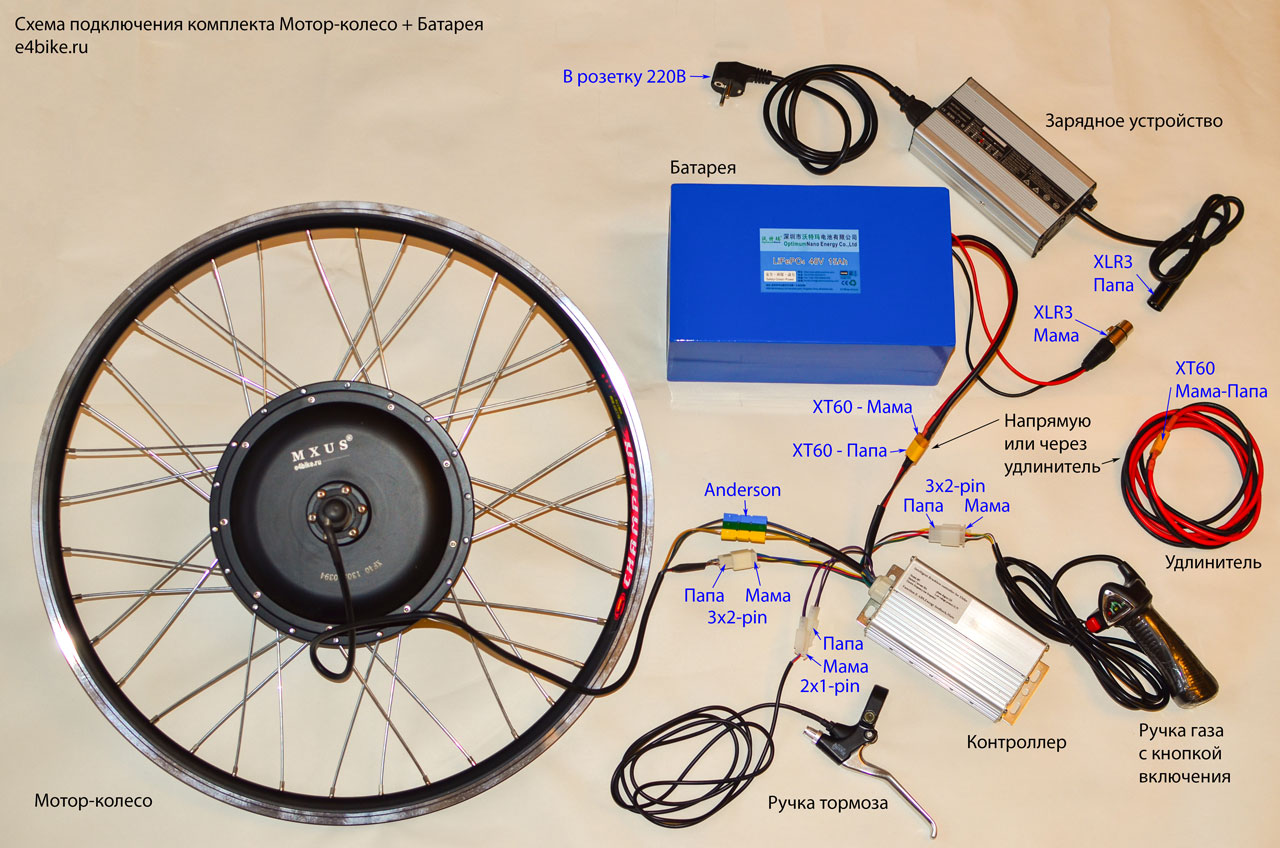
Электровелосипед включает следующие составляющие:
- электропривод – источник тяги;
- контроллер – блок управления транспортным средством, который отвечает за его функционирование;
- аккумулятор – специальная батарея, устанавливаемая на раме или на месте багажника;
- бортовой компьютер – собирает и выводит на дисплей данные о велосипеде и поездке;
- регулятор скорости – ручка газа, прикреплённая к рулю;
- дополнительные комплектующие – провода, предохранители, фонари и пр.
Представить, как работает электровелосипед с педалями, несложно. При переходе на педальный режим, его управление осуществляется привычными для классического велосипеда движениями. При этом устройство контролирует интенсивность вращения педалей для регулировки работы электродвигателя.
Электрический двигатель приводит колёса в движение. Корректную работу мотора обеспечивает контроллер, который передаёт ему команды управления, обеспечивает подачу тока к аккумулятору и комплектующим. За счёт этого происходит движение мотор-колеса. По типу привода электрические транспортные средства классифицируются как передне- и заднеприводные, а также полноприводные. Последние наиболее приспособлены к езде по неровной местности.
Важно, чтобы все составляющие электровелосипеда были верно подобраны по техническим характеристикам: ресурсу, рабочему напряжению, мощности, силе тока. Даже минимальные отклонения в показателях способны вывести велосипед и строя, и придётся прибегать к дорогому ремонту.
Аккумуляторы для электробайков отличаются повышенной ёмкостью, благодаря чему можно преодолеть на одном заряде батареи значительное расстояние – до 50 км. Комплектуются велосипеды с электродвигателем специальными батареями: LiFePO4, Li-ion, LiPo, никель-металл-гибридными либо свинцово-кислотными. Аккумулятор подбирается под конкретную модель транспортного средства. Главный нюанс – напряжение батареи должно соответствовать характеристикам контроллера и мотор-колеса. Это необходимо для правильного и эффективного функционирования электротранспорта.
Мотор-колесо представляет собой электродвигатель, устанавливаемый вместо обычного колеса велосипеда либо встраиваемый в ступицу. По виду конструкции такие двигатели подразделяются на:
- редукторные;
- прямоприводные (безредукторные).
Большинство современных моделей оснащены безредукторными моторами с простой конструкцией. Эти двигатели обеспечивают высокую мощность (от 1000 ватт) и большую скорость передвижения (40-45 км/ч) на электровелосипеде. .
.
Работает мотор-колесо вне зависимости от вида одинаково. Оно приводится в действие за счёт магнитного поля, передаваемого с неподвижного статора на магниты ротора. Не вдаваясь в научные подробности, достаточно понимать, что постоянное вращение ротора обеспечивает подача импульсов напряжения с определённой частотой и последовательностью. За передачу импульсов отвечает контроллер.
Контроллер не только обеспечивает бесперебойную работу двигателя, но и отслеживает корректную регулировку скорости электровелосипеда, защищает от перегрузок, контролирует крутящий момент и управляет дополнительным оборудованием.
Включение контроллера происходит при получении сигнала от акселератора, на который воздействует ездок. Эти данные устройство обрабатывает и задаёт требуемую скорость вращения мотора. Таким же методом оборудование передаёт сведения о необходимости затормозить.
Современные приборы разрабатываются с функцией смены полярности, то есть электробайки благодаря этому могут ездить задним ходом. Контролирующее устройство – крайне важная составляющая электрического транспортного средства, поэтому оно должно обладать надёжной защитой от механических повреждений, погодных осадков.
Прошивка также имеет большое значение при необходимости изменений характеристик работы двигателя, проведения апгрейда электробайка, использования дополнительных «наворотов». Поэтому стоит внимательно подходить к выбору прошивки и сервисному центру, где производят обновление.
Понимание работы велогибрида, его устройства и технических характеристик помогает сделать оптимальный выбор. Кроме того, стоит обращать внимание на ёмкость аккумулятора, мощность мотора и возможность подключения дополнительных функций.
Статьи
Оцените статью:
(0.0)
Илья Трисветов
Система внутриколесного двигателя.
Система внутриколесного двигателя — это разновидность электромобиля… | by WAVE OF IMAGINATION Система привода в колесе — это тип системы привода EV (электромобиля). Электродвигатели напрямую подключены к колесу, в то время как обычные электромобили имеют конструкцию, а бензиновый двигатель заменен электродвигателем.
Что такое мотор-колесо?
Основной принцип автомобиля, оснащенного внутриколесным электродвигателем, прост. Двигатель внутреннего сгорания, обычно находящийся под капотом, просто не нужен, его заменяют как минимум двумя двигателями, расположенными в ступицах колес автомобиля, эти колеса содержат не только тормозные компоненты, но и все функции, которые раньше выполнялись двигатель, трансмиссия, сцепление, подвеска и другие сопутствующие детали.
Несмотря на то, что концепция относительно проста в теории, моторы могут вызвать ряд вопросов относительно рабочих характеристик и эффективности.
В последние годы мы наблюдаем, как некоторые разработчики транспортных средств переходят к конфигурации трансмиссии, в которой двигатель устанавливается внутри колеса, что представляет собой систему внутриколесного двигателя. Мы должны признать, что когда электродвигатели интегрированы в колеса, открывается впечатляющий объем нового пространства, и, конечно, эти так называемые мотор-колеса или внутриколесные двигатели имеют определенные преимущества, но они также создают некоторые проблемы.
Электродвигатели в колесах не новы, в начале 20-го века Фердинанд Порше в первом гибридном автомобиле использовал электродвигатели, установленные на ступицах, в каждом колесе. Эти двигатели приводят колесо непосредственно в колесо, нет необходимости в редукторе или приводном валу. При использовании редуктора скорость снижается, а крутящий момент увеличивается. Но с полноприводным двигателем снижения нет. В этой системе скорость вращения колеса равна скорости двигателя, поэтому требуемый крутящий момент и мощность должны передаваться в режиме прямого привода.
Мотор-колеса подвергаются прямому воздействию пыли, соленой воды и других дорожных жидкостей, а также вибраций и ударов, что сокращает срок их службы. Это одна из основных причин, по которой Ford в конце концов решил отказаться от концепций внутриколесных двигателей, над которыми они работали, для нового электрического F-150 в 2008 году.
Четыре полноприводных двигателя, также известных как Quad-Motor Drive. Эти четыре двигателя обеспечивают мгновенную мощность и независимо регулируют крутящий момент на каждом колесе для точного управления в любых условиях, а управление мощностью на индивидуальном уровне двигателей обеспечивает векторизацию крутящего момента.
Что такое векторизация крутящего момента?
По сути, векторизация крутящего момента — это технология, которая распределяет мощность двигателя между левой и правой сторонами автомобиля. При распределении крутящего момента одна сторона колеса на оси может вращаться быстрее или медленнее, чем другая.
Управление вектором крутящего момента направлено на улучшение реакции рулевого управления и управляемости за счет распределения крутящего момента между колесами автомобиля.
Чем In-Wheel Motor EV отличается от других автомобилей?
Для автомобилей с традиционным двигателем внутреннего сгорания система трансмиссии состоит из обычной механической системы, такой как двигатель, трансмиссия, выхлоп, приводной вал, дифференциал.
В обычном электромобиле двигатель заменен электродвигателем с инвертором и комплектом аккумуляторов, установленных сзади или в основании автомобиля.
В случае электромобилей, использующих внутриколесные двигатели, все механические подсистемы трансмиссии исключаются и заменяются прямым приводом, а двигатели не нуждаются в карданном валу, поскольку они соединены непосредственно с колесами.
О дизайне
Производство транспортного средства, в котором используются электродвигатели, установленные в колеса, — это процесс, который намного сложнее, чем просто вырвать двигатель, а затем втиснуть электродвигатели в неиспользуемое пространство внутри колеса. Этот тип электродвигателя предназначен для работы на гибридных транспортных средствах, чтобы повысить эффективность транспортных средств с полным аккумуляторным питанием и даже электромобилей на топливных элементах.
Количество энергии, генерируемой этими внутриколесными двигателями, может варьироваться в зависимости от производителя и размера используемого двигателя. Электродвигатель устанавливается внутри колеса и передает мощность на колеса напрямую, без какой-либо трансмиссии.
Идея установки двигателя внутри обода колеса в электромобиле является правильным выбором, так как можно гарантировать, что полная выходная мощность двигателя доступна на колесе без каких-либо механических потерь в трансмиссии.
Обеспечивают ли эти внутриколесные электродвигатели достаточный крутящий момент для любого применения?
Крутящий момент играет важную роль в времени отклика любого автомобиля и его производительности. Фактически, в автомобиле, оснащенном электродвигателями в колесах, большой крутящий момент доступен почти мгновенно.
Электродвигатели создают большой крутящий момент, и, поскольку эта сила передается непосредственно на колесо, каждое колесо может быть оснащено датчиками для определения требуемого крутящего момента в любой момент времени.
Эффективность мотора-колеса
Мотор-колеса всегда будет страдать от потерь при холостом ходе и при частичных потерях нагрузки. потому что двигатели не могут быть отделены от колес. Некоторые компании заявляют, что эффективность полноприводных двигателей выше из-за отсутствия коробки передач, хотя коробка передач всегда вносит некоторую неэффективность. Одно- или двухступенчатые коробки передач, которые обычно используются для электромобилей, намного эффективнее сложных многоступенчатых ступенчатые трансмиссии в трансмиссии двигателя внутреннего сгорания.
Эта потеря эффективности транспортного средства компенсируется тем, что из-за коробки передач. Электродвигатель может работать в своей наиболее эффективной рабочей зоне, что приводит к увеличению запаса хода транспортного средства по сравнению с системой прямого привода в зависимости от варианта использования и ездового цикла.
Рекуперативное торможение
Некоторые модели колесных двигателей также предлагают рекуперативное торможение, что означает, что система улавливает часть собственной кинетической энергии при торможении и отправляет ее обратно для зарядки аккумулятора.
Некоторые гибриды, такие как Toyota Prius и Tesla Roadster, уже используют эту технологию рекуперативного торможения, которая увеличивает запас хода автомобиля. Одним из самых больших преимуществ внутриколесных двигателей является тот факт, что мощность передается прямо от двигателя непосредственно на колесо, что сокращает расстояние, на которое проходит мощность, повышает эффективность двигателя. Например, в городских условиях двигатель внутреннего сгорания может работать только с КПД 20%, что означает, что большая часть его энергии теряется или тратится впустую из-за механических методов, используемых для передачи мощности на колеса, но в двигателе в колесе в том же говорят, что среда работает примерно при 90% эффективности.
Это будущее электромобилей?
Инженеры Porsche разработали систему управления крутящим моментом для четырехмоторной трансмиссии электромобиля, которая позволяет электрическим внедорожникам управляться со способностями спортивного автомобиля даже в самых сложных условиях. Из-за гораздо более быстрой реакции электродвигателя по сравнению с двигателем внутреннего сгорания система контроля тяги электромобиля может реагировать намного быстрее.
В электромобиле крутящий момент полностью контролируется электроникой, которая работает значительно быстрее, чем механические сцепления. Интеллектуальное программное обеспечение каждую миллисекунду распределяет усилия таким образом, чтобы автомобиль всегда вел себя нейтрально, но решение porsche — это не просто полный привод, а использование отдельных двигателей, управляющих каждым колесом автомобиля.
Наличие нескольких двигателей имеет свои преимущества и недостатки, большее количество двигателей увеличивает стоимость и сложность, но устраняет необходимость в приводном валу и обеспечивает больший контроль. Двигатели также могут увеличить неподрессоренную массу, что может негативно сказаться на управляемости и ходовых качествах.
Например. Становится возможным поворачивать колеса на 90 градусов и двигаться влево или вправо или даже вращаться на месте вместо того, чтобы просто двигаться вперед или назад. Это добавляет еще одно измерение к тому, как автомобиль может двигаться, и позволяет легко перемещаться в ограниченном пространстве.
Новый rivian r1t имеет по одному двигателю на каждое колесо. Эта четырехмоторная трансмиссия позволяет грузовику rivian с легкостью управляться как спортивный седан на дороге и 4 на 4 на бездорожье, что, как сообщается, делает r1t самым быстрым грузовиком в мире.
Преимущества мотор-колес
Мотор-колеса просты в установке и замене, они добавляют гибкости, поскольку могут использоваться для привода заднего или переднего привода, а также полноприводных автомобилей без особых изменений в приводе. цепные имеют компактные размеры, так как весь двигатель находится внутри колеса. Внутриколесные двигатели обеспечивают высокий КПД за счет отсутствия механических потерь от трансмиссионного дифференциала и приводных валов, а также позволяют двигателю работать тише благодаря электронному управлению двигателем. Это означает, что такие функции, как ABS, контроль тяги и даже круиз-контроль, могут использоваться более эффективно.
Недостатки мотор-колес
Основной проблемой мотор-колес является проблема неподрессоренной массы, неподрессоренная масса – это масса всех компонентов, включая раму, двигатель, пассажиров и кузов, которые не поддерживаются рамой автомобиля. приостановка. Неподрессоренная масса включает в себя колеса, тормоза, и она перемещается вверх и вниз по любым неровностям и выбоинам, и она пытается следовать контурам дороги, а с мотор-колесами, являющимися частью неподрессоренной массы автомобиля, они будут воздействовать на каждую неровность выбоины и поворот на высокой скорости. .
Кроме того, они будут подвергаться воздействию дорожной грязи, грязи, пыли, воды и дорожной соли, что может сократить срок службы двигателей. Моторы в колесах дороже, чем одномоторное крепление на задней оси.
Поговорим о внутриколесных двигателях
- Peter Leijnen
- Блог
внутри колеса: система двигателя в колесе. Мы должны признать, что когда электродвигатели интегрированы в колеса, появляется впечатляющее количество нового пространства. И, конечно же, эти так называемые мотор-колеса или мотор-колеса имеют определенные преимущества, но они также создают некоторые проблемы.
Размер двигателя и стоимость
Моторы в колесах не новы. В начале 20-го века в первом гибридном автомобиле Фердинанда Порше использовались электродвигатели, установленные на ступицах, на каждом колесе. Эти двигатели приводят в движение колесо напрямую. Нет необходимости в коробке передач или карданном валу. При использовании редуктора скорость снижается, а крутящий момент увеличивается. Но с мотором в колесе снижения нет. Скорость вращения колеса равна скорости двигателя, поэтому требуемый крутящий момент и мощность должны передаваться в режиме прямого привода. Каковы последствия этого? Поскольку крутящий момент двигателя напрямую зависит от размера двигателя, а умножения крутящего момента нет (поскольку нет коробки передач), размер двигателя должен быть больше, чтобы достичь требуемой производительности. Это также оказывает значительное влияние на стоимость, поскольку уровень создания крутящего момента напрямую зависит от количества необходимого материала постоянного магнита. Особенно с 4 колесами (и, следовательно, с 4 двигателями) стоимость трансмиссии значительно возрастает.
Долговечность
Мотор-колеса подвергаются прямому воздействию пыли, соли, воды и других жидкостей, а также вибрации и ударам, что сокращает срок их службы. Это одна из основных причин, по которой Ford в конце концов решил отказаться от концепций колесных двигателей, над которыми они работали, для нового электрического F-150.
Не так много данных о практической долговечности колесных двигателей в транспортных средствах, просто потому, что их не так много в эксплуатации. Но для большинства вариантов использования мы можем ожидать, что моторы в колесах далеки от идеального решения.
Динамика автомобиля
Важным аспектом динамики автомобиля является «неподрессоренная масса». Увеличение массы колеса снижает комфорт при вождении. Почему это? Неподрессоренная масса не поддерживается подвеской автомобиля. Таким образом, снижение неподрессоренной массы является ключом к улучшению управляемости. Чем ниже неподрессоренная масса, тем легче амортизаторам и пружинам удерживать шины в контакте с дорогой на неровной поверхности. Многие проблемы, если не все, вызваны инерцией. Большая масса означает более высокую инерцию. А более высокая инерция означает большую нагрузку на амортизаторы и пружины. Если неподрессоренные компоненты имеют большую массу, их труднее ускорять/замедлять, что затрудняет поддержание постоянной нагрузки подвески на шину.
Постоянный контакт шины с дорогой необходим для управляемости и безопасности. Вот почему производители автомобилей обычно делают все возможное, чтобы сделать колеса максимально легкими, чтобы обеспечить оптимальную производительность.
Мотор-колеса напрямую увеличивают неподрессоренную массу автомобиля, поскольку они расположены «перед» подвеской при трогании с места. Эта проблема серьезно усугубляется тем фактом, что двигатели в колесах, как правило, имеют прямой привод и, следовательно, тяжелее, чем их бортовые аналоги.
Силовой агрегат на колесах обычно реализуется как система полного привода. Привод на четыре колеса положительно влияет на ходовые качества автомобиля. С полным приводом сцепление с дорогой лучше. Система распределения крутящего момента обеспечивает оптимальное сцепление каждого колеса в любой ситуации. Это повышает безопасность, ускорение и управляемость. Тем не менее, 4WD также может быть реализован с бортовыми двигателями (как это делают большинство электрических «мощных» автомобилей в наши дни), так что это ни в коей мере не является преимуществом для двигателей в колесах. То же самое касается способа рекуперации энергии при рекуперативном торможении: в этом отношении внутриколесные двигатели не дают никаких преимуществ перед бортовыми двигателями.
Эффективность
Двигатели в колесах всегда будут больше страдать от потерь холостого хода и потерь при частичной нагрузке, потому что двигатели нельзя отсоединить от колес. Существует тенденция к установке большего количества двигателей в транспортном средстве, и то, что мы видим, например, с Porsche Taycan, заключается в том, что задние двигатели отсоединяются от колес при движении на скорости по шоссе, чтобы оптимизировать эффективность трансмиссии. Это очень сложно реализовать с моторами в колесах. Они всегда вращаются вместе с колесами, даже если не используются активно.
Некоторые компании заявляют, что эффективность колесных двигателей выше из-за отсутствия коробки передач. Хотя коробка передач всегда немного неэффективна, 1- или 2-ступенчатые коробки передач, которые обычно используются для электромобилей, намного эффективнее, чем сложные многоступенчатые трансмиссии, используемые в силовых агрегатах с двигателями внутреннего сгорания. Мы наблюдаем потерю эффективности коробки передач на 1 или, может быть, 2 процента. Однако эта потеря эффективности компенсируется тем фактом, что благодаря коробке передач электродвигатель может работать в своей наиболее эффективной рабочей зоне, что приводит к увеличению запаса хода транспортного средства по сравнению с системой прямого привода в зависимости от вариант использования и ездовой цикл.
Платформы для скейтборда и модули для прохождения поворотов
В последних тенденциях платформ для скейтборда мы видим 3 различных варианта установки:
- централизованные встроенные двигатели (например, Canoo),
- двигатели, расположенные близко к колесу (но не в колесе). (например, REE) и
- мотор-колеса (например, Lightyear)
Установка двигателей ближе к колесу ставит новые инженерные задачи. Возьмем пример с торможением. Все электромобили используют ту или иную форму рекуперативного торможения, что очень полезно для эффективности. Но не все торможения можно выполнять только с помощью рекуперативного торможения, например. для экстренной остановки. Это означает, что фрикционные тормоза по-прежнему необходимы, а в двигателях колес остается очень мало места для их установки. В результате охлаждение тормозов становится проблемой.
В каких случаях целесообразно использовать конфигурации «в колесе» или «рядом с колесом»?
Новые конфигурации, такие как «в колесе» и «рядом с колесом», имеют свои преимущества. Эти новые платформы могут стать достойной альтернативой, особенно в тех случаях, когда место для аккумуляторной батареи имеет важное значение, модульность является ключевым фактором, а транспортное средство будет двигаться по гладким, плоским поверхностям.
Примером могут служить небольшие коммерческие автомобили, которые передвигаются с относительно низкой скоростью и по гладким поверхностям, таким как городские районы. В сочетании с платформой электромобиля в стиле скейтборда, где все механические части встроены в платформу, такая компоновка максимально увеличивает доступное полезное пространство.
Интеграция
В компании Traxial мы верим в необходимость установки нескольких двигателей на транспортное средство, особенно при использовании преимуществ размеров двигателей с осевым магнитным потоком. Комбинация двигателя с осевым потоком с 1- или 2-ступенчатой коробкой передач является очень практичным решением даже при использовании 1, 2, 3 или 4 электродвигателей на одном транспортном средстве.
Заключение
За последние 20 лет появилось много концептов и демонстраторов, но ни один пассажирский автомобиль с мотор-колесами не производится серийно (пока). На данный момент мы можем сказать, что Ford был прав, отказавшись от колесных двигателей для своего пикапа F-150. Глядя на вариант их использования, стационарные двигатели имеют больше смысла, поскольку они обеспечивают лучшую динамику автомобиля и долговечность, поскольку двигатели находятся внутри кузова автомобиля и защищены от окружающей среды. Кроме того, это более энергоэффективное решение, поскольку при необходимости один или несколько двигателей можно разъединить. В большинстве вариантов использования наземной электромобили больше всего выигрывают бортовые двигатели. Для некоторых конкретных случаев использования имеет смысл использовать либо колесные, либо угловые модули. Но для большинства применений трансмиссия, сочетающая 1- или 2-скоростную коробку передач с осевым магнитным двигателем без ярма Traxial, обеспечит превосходную эффективность при минимально возможном размере.
Поговорите с нашим отделом продаж, чтобы изучить возможности интеграции осевых двигателей Traxial без ярма в ваши следующие транспортные средства.
Технология двигателей
Крутящий момент и скорость на колесах транспортных средств с двигателями в колесах
Первоначально эта статья была опубликована 20 сентября 2017 года. независимо от колес.
Большинство дорожных транспортных средств приводятся в движение одним двигателем или двигателем с трансмиссией, передающей эту мощность на колеса, создавая крутящий момент на ступицах колес. Колеса должны свободно двигаться с разной скоростью относительно друг друга, чтобы можно было проходить повороты и менять дорожное покрытие.
Это достигается с помощью дифференциала, механического устройства, которое в своей простейшей форме передает одинаковый крутящий момент на оба колеса на оси, позволяя им вращаться с разной скоростью. Затем колеса могут вращаться со своей естественной скоростью, определяемой кинематикой транспортного средства.
Так называемый «открытый дифференциал» допускает любую разницу скорости вращения колес на оси. Там, где сила трения между шиной и дорогой сильно отличается на одном колесе от другого, колесо с более низким коэффициентом трения может потерять сцепление с дорогой и быстро раскрутиться. Это может произойти при прохождении поворотов, когда вес автомобиля смещается на внешние колеса, так что внутренние колеса имеют мало сцепления с дорожным покрытием, или когда одно колесо находится на поверхности с плохим сцеплением, например, на льду или рыхлых камнях.
Такая ситуация явно нежелательна, поэтому было разработано несколько систем, противодействующих потере сцепления с дорогой, но при этом позволяющих передавать крутящий момент на колесо с хорошим сцеплением с дорогой. Чаще всего используется «дифференциал повышенного трения» или противобуксовочная система (TCS) для предотвращения пробуксовки колес. Первый представляет собой более сложный механический эквивалент открытого дифференциала, который ограничивает дифференциал скорости вращения колес, а второй притормаживает колесо, теряющее сцепление с дорогой, чтобы предотвратить его раскручивание.
Рис. 1: Электродвигатель Protean Electric с электроникой и тормозом.
Более сложные системы «управления вектором крутящего момента» обеспечивают дальнейшее улучшение управляемости транспортного средства, но встречаются редко из-за их сложности и стоимости.
Транспортные средства с двигателями в колесах не имеют дифференциала, поэтому возникает вопрос, как будет вести себя транспортное средство с точки зрения скорости вращения колес и как можно решить проблемы, связанные с отсутствием тяги. Ответы довольно прямолинейны.
Если колеса-моторы управляются одинаковым крутящим моментом каждого из моторов, автомобиль будет вести себя точно так же, как если бы был открытый дифференциал. Систему контроля тяги можно использовать для контроля потери тяги, как в обычном автомобиле. С другой стороны, улучшенные плавность хода и управляемость автомобиля могут быть достигнуты за счет динамического изменения распределения крутящего момента между колесными двигателями.
Система мотор-колес
Для целей настоящей статьи система мотор-колес считается состоящей из двух блоков, установленных на противоположных сторонах транспортного средства, по одному на каждое переднее колесо или по одному на каждое заднее колесо рулевое колесо. Каждый блок состоит из электрической машины, инвертора с микропроцессорным управлением и фрикционного тормоза. В случае продуктов Protean Electric они объединены в единый блок, полностью размещенный внутри обода колеса (см. рис. 1), но можно также разместить инвертор в другом месте автомобиля.
Двигатель может обеспечивать как положительный (ускоряющий), так и отрицательный (тормозной) крутящий момент, но фрикционные тормоза сохраняются, поскольку требования к торможению обычно превышают возможности двигателя и в случаях, когда электрическая система автомобиля не может принять ток, который восстанавливается при торможении.
Рис. 2: Схема управления внутриколесными электродвигателями.
Мотор-колесо представляет собой устройство, создающее крутящий момент. В примере с двигателем Protean Electric блок управления транспортным средством (VCU) связывается с системой двигателя через шину локальной сети контроллеров (CAN), отправляя запросы крутящего момента каждые несколько миллисекунд (см. рис. 2). В ответ система двигателя развивает требуемый крутящий момент на ступице колеса. По возврату двигатель сообщает о своем состоянии и максимально доступном крутящем моменте. Он также может сообщать о своей скорости, которую VCU может использовать для расширенных функций контроля тяги.
В отличие от двигателей внутреннего сгорания, электродвигатели могут создавать положительный и отрицательный крутящий момент в обоих направлениях. Это называется работой в четырех квадрантах и позволяет трансмиссиям с электродвигателями улучшать функции контроля тяги и устойчивости автомобиля. Кроме того, системы электродвигателей имеют очень быстрое время отклика. Обычно они способны переключаться с максимального положительного крутящего момента на максимальный отрицательный крутящий момент или наоборот менее чем за 10 мс. Возможен высокочастотный контроль, который может повысить безопасность и управляемость автомобиля, особенно с двигателями в колесах с прямым приводом, которые обеспечивают крутящий момент непосредственно на ступицах колес без каких-либо промежуточных валов, осей или шестерен.
Обратите внимание, что двигатель не является устройством с регулируемой скоростью. VCU не может запрашивать скорость от системы двигателя. Как и в случае с обычными трансмиссиями, скорость вращения колес является следствием крутящего момента, приложенного к ступице колеса, в сочетании с сопротивлением вращению, в котором преобладает инерция транспортного средства.
Дифференциал и связанные с ним функции
Дифференциал требуется там, где один силовой агрегат, двигатель внутреннего сгорания или электродвигатель используется для привода двух колес на оси. Без него два колеса на оси были бы вынуждены вращаться с одинаковой скоростью, что привело бы к неприемлемой управляемости автомобиля и износу шин. Дифференциал также является конечным передаточным числом, усиливающим крутящий момент от карданного вала к полуосям (см. рис. 3).
Рис. 3: Обычный заднеприводный автомобиль с дифференциалом.
Для неприводных колес дифференциал не требуется, так как они физически не связаны между собой и поэтому могут вращаться с разной скоростью.
Открытый дифференциал
Открытый дифференциал — это самый простой и наиболее распространенный тип дифференциала на дорожных транспортных средствах. Скорости колес определяются кинематикой автомобиля, слегка измененной динамикой шин. Игнорируя проскальзывание колес, при прохождении поворотов внешнее колесо будет вращаться быстрее, чем внутреннее. В автомобиле с шириной колеи t и радиусом качения r , движущегося со скоростью v в повороте радиусом R , приблизительные угловые скорости внутреннего и внешнего колес определяются уравнением 1
(уравнение 1)
Обратите внимание, что это чисто результат геометрии ситуации и того факта, что колеса могут свободно вращаться независимо; здесь нет зависимости от крутящего момента, подводимого к колесам (см. рис. 4). Учет динамики шин изменяет уравнение. 1 немного. Приложение крутящего момента к колесу приводит к так называемому проскальзыванию колеса [1]. Это не означает потери сцепления между шиной и дорогой; скорее, это особенность динамики шины. В результате соотношение между скоростью вращения колеса и скоростью транспортного средства изменяется в соответствии с:
где s это коэффициент скольжения. Коэффициент скольжения зависит от прилагаемого крутящего момента, а также от свойств шины и поверхности контакта шина-дорога [2]. Коэффициент скольжения может превышать 0,1, в то время как хорошее сцепление сохраняется на хорошем дорожном покрытии и при приложении высокого крутящего момента. С учетом проскальзывания, которое может быть разным для внутренних и внешних колес из-за различий в дорожном покрытии, получаем скорости колес в уравнении 2.
(уравнение 2)
Поскольку скольжение является функцией крутящего момента, теперь существует некоторая зависимость от крутящего момента на каждом из колес. Есть дальнейшие незначительные модификации уравнения. 1, которые являются результатом недостаточной или избыточной поворачиваемости транспортного средства и неровностей дорожного покрытия, но они не относятся к данному обсуждению.
Важные выводы, касающиеся поведения ведущих колес с открытым дифференциалом, следующие:
- Скорости колес полностью определяются после допущения, что на каждое колесо передается одинаковый крутящий момент и что два колеса на оси могут свободно вращаться. вращаться с разной скоростью.
- Колеса обретают свою «естественную» скорость, что обеспечивает хорошую управляемость и поведение шин на поворотах.
Пока эти два предположения верны, не имеет значения, как они достигаются.
Электродвигатели в колесах и открытый дифференциал
Самый простой способ управления парой электродвигателей в колесах на оси — потребовать равный крутящий момент обоих двигателей.
Оба колеса будут приводиться в движение с одинаковым крутящим моментом независимо от разницы скоростей, если VCU требует от обоих двигателей одинаковый крутящий момент.
В автомобиле с мотор-колесами ведущие колеса физически не связаны полуосями, поэтому они не вынуждены вращаться с одинаковой скоростью. Как и в случае с открытым дифференциалом, они могут свободно вращаться с разными скоростями без ограничений.
Таким образом, два допущения верны для транспортного средства, приводимого в движение электродвигателями в колесах, и поэтому также применимо уравнение 1: поведение колес в транспортном средстве, приводимом в движение электродвигателями в колесах, точно такое же, как и в транспортное средство с центральной силовой установкой, приводимой в движение через открытый дифференциал, если VCU требует одинакового крутящего момента от каждого двигателя в колесе.
Рис. 4: Аккермановская геометрия вращающегося транспортного средства.
Хотя физико-механического дифференциала нет, мы будем называть этот режим управления двигателями в колесах «электронным открытым дифференциалом».
Ограничения открытого дифференциала
Открытый дифференциал и электронный открытый дифференциал подвержены тем же ограничениям, которые возникают, когда одно колесо на оси имеет значительно лучшее сцепление с дорогой, чем другое, и в этом случае:
- Максимальный крутящий момент, который может передаваться на любое колесо, ограничивается колесом с более низким пределом сцепления.

- Нет ничего, что могло бы предотвратить пробуксовку колеса с более низким сцеплением, если крутящий момент был больше, чем может выдержать контакт шины с дорогой.
Существует несколько обстоятельств, которые могут привести к асимметричным ограничениям тяги по оси:
- Прохождение поворотов, когда вес смещается на внешние колеса, уменьшая предел тяги на внутренних колесах.
- «Сплит- μ » дорожное покрытие, у которого одно колесо находится на хорошем дорожном покрытии, а другое — на рыхлых камнях, льду или воде.
- Вождение по бездорожью.
В обычных транспортных средствах используется ряд технологий для предотвращения пробуксовки колес и потери крутящего момента в этих обстоятельствах. Некоторые из них и их аналоги для колесных двигателей обсуждаются в этой статье.
Противобуксовочная система
Противобуксовочная система предназначена для предотвращения пробуксовки колеса из-за отсутствия сцепления с поверхностью дороги. Он реализован как часть системы электронного контроля устойчивости (ESC), которая может задействовать тормоза отдельно для каждого колеса с помощью блока антиблокировочной тормозной системы (ABS). ESC становится все более распространенным явлением и в настоящее время является обязательным в Европе и США для легковых автомобилей.
Система контроля тяги обнаруживает, что колесо пробуксовывает, и притормаживает это колесо. Помимо контроля потери тяги, это позволяет передавать крутящий момент на противоположное колесо даже при открытом дифференциале или электронном открытом дифференциале, поскольку тормоз противодействует крутящему моменту, прикладываемому трансмиссией к пробуксовывающему колесу.
TCS можно использовать с мотор-колесами точно так же, как и в обычных автомобилях, с теми же результатами. VCU не требует специальных действий.
Ручная тяга, с другой стороны, может контролироваться без использования тормозной системы ESC в транспортном средстве с приводом от мотора-колеса. VCU использует информацию о скорости вращения колес, передаваемую двигателями в колесах, чтобы определить, когда теряется сцепление с дорогой, и уменьшает требуемый крутящий момент на этом колесе. Это может быть сделано без уменьшения потребности в крутящем моменте на другом колесе. Результат может быть лучше, чем у обычной TCS, из-за быстрого времени отклика системы двигателя в колесе и способности двигателей создавать как положительный, так и отрицательный крутящий момент. Мы можем назвать это электронной системой контроля тяги (eTCS).
eTCS чем-то похожа на системы Antriebsshlupfregelung (ASR), которые являются частью системы контроля тяги в некоторых обычных автомобилях и включают модуляцию крутящего момента двигателя.
Дифференциал повышенного трения
Дифференциал повышенного трения представляет собой более сложную форму механического дифференциала. В производстве находится ряд различных реализаций, в том числе с элементом электронного управления. Здесь они обсуждаются отдельно как «активные дифференциалы».
В отличие от открытого дифференциала, который всегда равномерно распределяет крутящий момент на два колеса на оси, дифференциал повышенного трения распределяет крутящий момент в соответствии с относительными скоростями двух колес, что достигается добавлением механизма, который сопротивляется относительной скорости различия между двумя выходными валами. Крутящий момент уменьшается на более быстром колесе и увеличивается на более медленном колесе, что предотвращает раскручивание колеса, но не снижает общий крутящий момент. Хотя это преодолевает основные ограничения открытого дифференциала, это также приводит к большему крутящему моменту, передаваемому на внутренние колеса во время прохождения поворотов, что вызывает недостаточную поворачиваемость.
В транспортных средствах, приводимых в движение двигателями в колесах, VCU может требовать неодинакового крутящего момента от двух двигателей в ответ на скорости, сообщаемые двигателями, точно так же, как дифференциал повышенного трения. Однако на практике это не обеспечивает оптимального распределения крутящего момента при отсутствии потери тяги. Система eTCS с векторизацией крутящего момента обеспечит превосходную управляемость и контроль тяги.
В обычном автомобиле с дифференциалом повышенного трения можно обеспечить асимметричный крутящий момент на оси без существенного снижения максимального общего крутящего момента на оси. С другой стороны, в мотор-колесах уменьшение крутящего момента на одном колесе не позволяет увеличить крутящий момент на противоположном колесе сверх его максимального крутящего момента. Это неизбежно означает, что общий крутящий момент на оси, создаваемый двумя мотор-колесами, уменьшается из-за асимметрии крутящего момента.
Блокируемый дифференциал
Блокированный дифференциал может быть эффективен для внедорожников, у которых тяговое усилие на колесах плохое и очень непостоянное. Заблокированный дифференциал заставляет два колеса на оси вращаться с одинаковой скоростью. Затем крутящий момент естественным образом перемещается туда, где есть тяга.
С моторами в колесах VCU может реализовывать контуры управления скоростью на каждом из ведущих колес для достижения того же эффекта. Как описано здесь, сами двигатели не включают управление скоростью, но связь между двигателями и VCU имеет достаточную пропускную способность, чтобы позволить блоку управления транспортным средством (VCU) запускать контуры управления для регулирования скорости вращения колес.
Активный дифференциал
Активный дифференциал — это современная система, применяемая на некоторых автомобилях с высокими характеристиками, которая улучшает управляемость и управляемость за счет активного управления распределением крутящего момента. Система реагирует на различные датчики вокруг автомобиля, которые отслеживают намерения водителя и реакцию автомобиля, которые интерпретируются электронным блоком управления (ЭБУ). Затем ECU дает команду дифференциалу с электронным управлением, который может распределять крутящий момент в соответствии с требованиями. Помимо контроля тяги, такая система может улучшить управляемость и устойчивость. Механически активный дифференциал реализован как самоблокирующийся дифференциал с электронным управлением. Двумя пакетами сцепления обычно можно управлять с помощью электроники для передачи крутящего момента с одной полуоси на другую, тем самым изменяя поведение основного открытого дифференциала под управлением систем управления динамикой автомобиля в автомобиле. Примером такой системы является электронный модуль векторизации крутящего момента GKN, реализованный в BMW X63.
Дифференциал с электронным управлением — сложный и дорогой компонент. Подобная функциональность может быть достигнута без добавления механических компонентов в транспортном средстве с приводом от электродвигателя. В этом случае VCU выполняет расчеты, аналогичные тем, которые ECU выполнял бы для активного дифференциала, и соответственно предъявляет асимметричные требования к крутящему моменту для двух колесных двигателей. Это иногда называют векторизацией крутящего момента, и его можно использовать для:
- Повышения устойчивости автомобиля на высоких скоростях.
- Повышение устойчивости автомобиля при наличии таких помех, как боковой ветер или колеи на дороге.
- Улучшение маневренности автомобиля на низких скоростях.
- Улучшите чувствительность и управляемость на поворотах.
Управление вектором крутящего момента с помощью двигателей в колесах имеет преимущество перед активным дифференциалом в обычном автомобиле не только с точки зрения стоимости компонентов и массы, но и потому, что система более чувствительна и может лучше реагировать на переходные ситуации. Он также может плавно вводить тормозной момент, не используя тормозную систему, что расширяет возможности системы по поддержанию контроля над автомобилем.
Эквивалентность обычного транспортного средства и полноприводного транспортного средства
В таблице 1 приведены различные дифференциальные и связанные с ними системы, используемые в обычных транспортных средствах с двигателем центрального сгорания или электродвигателем, а также описана реализация на полноприводном транспортном средстве, которое приводит к такому же поведению.
В целом, управление скоростью вращения колес и, следовательно, управление транспортным средством в колесном автомобиле может быть лучше, чем в обычном транспортном средстве, и реализовано с меньшими затратами и сложностью.
Полный привод
В данном обсуждении рассматривается пара ведущих передних колес или пара ведущих задних колес транспортного средства. Все выводы в равной степени относятся к транспортному средству с двигателями на всех четырех колесах.
Например, отправка одинакового крутящего момента на все четыре двигателя в колесах дает точно такое же поведение, как у обычного полноприводного автомобиля с открытыми передним и задним дифференциалами и открытым межосевым дифференциалом. Все четыре колеса могут свободно вращаться независимо друг от друга, и на каждую ступицу колеса действует одинаковый крутящий момент.
Заключение
Колёсные электродвигатели позволяют улучшить управление динамикой автомобиля при меньших затратах и сложности по сравнению с обычными автомобилями, передающими мощность на колёса через дифференциал.
| Обычная автомобильная система | Эквивалент для полноприводных транспортных средств |
| Открытый дифференциал | Одинаковая потребность в крутящем моменте для обоих двигателей |
| Система контроля тяги на базе ESC | Контроль тяги на основе ESC, как в обычном автомобиле, или снижение потребности в крутящем моменте при проскальзывании колеса |
| Дифференциал повышенного трения | Уменьшить долю крутящего момента для более быстрого колеса в соответствии с дифференциальной скоростью |
| Заблокированный дифференциал | Реализовать контуры управления скоростью для каждого двигателя в VCU |
| Активный дифференциал 904:00 | Функция векторизации крутящего момента в VCU |
Простейшая реализация управления двигателем в колесах, всегда требующая одинакового крутящего момента от всех двигателей, приведет к поведению точно так же, как в автомобиле с открытым дифференциалом, но без необходимости в механическом дифференциале. или полуоси. На это поведение можно наложить те же тормозные системы контроля тяги и/или устойчивости, которые используются в обычных транспортных средствах, чтобы предотвратить пробуксовку колес во время прохождения поворотов или на поверхностях с низким сцеплением. С другой стороны, улучшенные функции контроля тяги и управления вектором крутящего момента могут быть достигнуты без добавления дополнительных материалов за счет модуляции крутящего момента, требуемого от электродвигателей, в отличие от обычных транспортных средств, которые требуют сложных, тяжелых и дорогих механических систем, таких как активный дифференциал для достижения аналогичного результата.
Ссылки
[1] М. Бланделл и Д. Харти: Подход многотельных систем к динамике транспортных средств, Оксфорд, Великобритания: Butterworth-Heinemann, 2004.
[2] HB Pacejka: Шина и динамика транспортных средств, Оксфорд, Великобритания : Butterworth-Heinemann, 2002.
[3] GKN plc. (2016 г.
