Что такое исполнитель Робот в среде Кумир. Как задать стартовую обстановку для Робота. Какие простые команды есть у Робота. Как использовать циклы при программировании Робота. Примеры программ для Робота с пошаговыми объяснениями.
Что такое исполнитель Робот в среде Кумир
Исполнитель Робот — это виртуальный робот в среде программирования Кумир, который может перемещаться по клеточному полю и выполнять простые команды. Робот позволяет изучать основы алгоритмизации и программирования на наглядных примерах.
Основные характеристики исполнителя Робот:
- Находится на прямоугольном клеточном поле
- Может перемещаться на одну клетку вверх, вниз, влево или вправо
- Умеет закрашивать клетку, в которой находится
- Может определять, свободен ли путь в заданном направлении
- Выполняет программы на алгоритмическом языке Кумир
Робот позволяет наглядно увидеть результат выполнения программы, что очень удобно для обучения основам программирования.
Как задать стартовую обстановку для Робота
Перед началом программирования Робота необходимо задать стартовую обстановку — начальное расположение Робота, стен и закрашенных клеток на поле. Для этого нужно:
- Запустить среду Кумир
- В меню «Инструменты» выбрать пункт «Редактировать стартовую обстановку Робота»
- В открывшемся окне задать размер поля, расположение Робота, стен и закрашенных клеток
- Сохранить созданную обстановку
- Загрузить ее в основном окне программы (Робот → Сменить стартовую обстановку)
Правильно заданная стартовая обстановка очень важна для корректной работы программы Робота.
Простые команды исполнителя Робот
Робот понимает следующие простые команды:
- вверх — перемещает Робота на одну клетку вверх
- вниз — перемещает Робота на одну клетку вниз
- влево — перемещает Робота на одну клетку влево
- вправо — перемещает Робота на одну клетку вправо
- закрасить — закрашивает текущую клетку, в которой находится Робот
Эти команды можно вводить с клавиатуры или использовать горячие клавиши:
- вверх — Escape, стрелка вверх
- вниз — Escape, стрелка вниз
- влево — Escape, стрелка влево
- вправо — Escape, стрелка вправо
- закрасить — Escape, пробел
Важно помнить, что горячие клавиши нужно нажимать последовательно, а не одновременно.
Использование циклов при программировании Робота
Для повторения одинаковых действий в программе Робота удобно использовать циклы. В Кумире есть два основных вида циклов:
Цикл со счетчиком
Используется, когда известно точное количество повторений. Синтаксис:
нц <количество повторений> раз <команды> кц
Например, чтобы Робот прошел 5 клеток вправо:
нц 5 раз
вправо
кц
Цикл с условием
Используется, когда количество повторений заранее неизвестно. Выполняется, пока верно заданное условие. Синтаксис:
нц пока <условие>
<команды>
кц
Например, чтобы Робот шел вправо до стены:
нц пока справа свободно
вправо
кц
Циклы позволяют сократить программу и сделать ее более универсальной.
Пример программы для Робота: рисуем квадрат
Рассмотрим пример программы, которая заставит Робота нарисовать квадрат 3×3 клетки:

использовать Робот
алг Квадрат
нач
закрасить
нц 3 раз
вправо
закрасить
кц
нц 3 раз
вниз
закрасить
кц
нц 3 раз
влево
закрасить
кц
нц 2 раз
вверх
закрасить
кц
кон
Эта программа:
- Закрашивает начальную клетку
- Проходит 3 клетки вправо, закрашивая их
- Спускается на 3 клетки вниз, закрашивая их
- Идет 3 клетки влево, закрашивая их
- Поднимается на 2 клетки вверх, закрашивая их
В результате получится закрашенный квадрат 3×3 клетки.
Практические задания для закрепления
Для лучшего понимания принципов работы Робота рекомендуется выполнить следующие задания:
- Написать программу, рисующую букву «П»
- Создать программу для рисования прямоугольника произвольного размера
- Запрограммировать Робота на рисование шахматной доски 4×4 клетки
- Написать программу для обхода препятствий на поле
Выполнение этих заданий поможет закрепить навыки программирования Робота и лучше понять принципы алгоритмизации.
Заключение
Исполнитель Робот в среде Кумир — отличный инструмент для изучения основ программирования. Он позволяет наглядно увидеть результат выполнения алгоритма и помогает развить алгоритмическое мышление. Освоив работу с Роботом, вы получите базовые навыки, которые пригодятся при изучении более сложных языков программирования.
Исполнитель Робот — Среда программирования Кумир
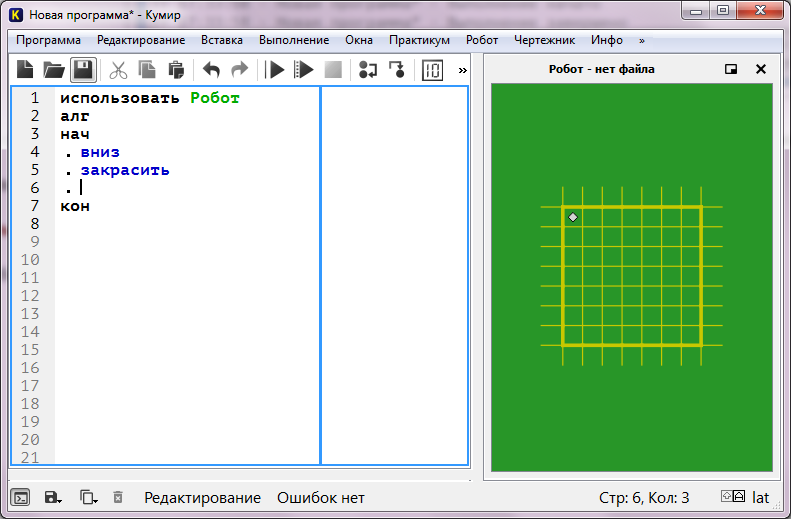
Запущенная программа Кумир выглядит так.
Первым делом мы должны раскомментировать первую строку нашей программы, убрав символ |
Таким образом, программа станет выглядеть так:
использовать Робот
алг
нач
кон
Удалив символ |, мы тем самым указали Кумиру на то, что будем работать с исполнителем Робот. Если этого не сделать, то при написании программы мы столкнемся с ошибкой «Нет такого алгоритма». Поэтому очень важно при создании новой программы раскомментировать первую строку. Теперь все готово для дальнейшей работы.
Но перед началом, нам необходимо задать стартовую обстановку Робота и познакомиться с простыми командами исполнителя Робот.
Стартовая обстановка Робота
Перед началом выполнения программы необходимо задать исполнителю Робот стартовую обстановку. Это значит установить Робота в нужную позицию, расставить стены, закрасить нужные клетки и т. п. Этот шаг очень важен. Если его проигнорировать, то программа может работать неправильно или вообще завершится аварийно.
п. Этот шаг очень важен. Если его проигнорировать, то программа может работать неправильно или вообще завершится аварийно.
Наш Робот находится в некой среде — это клетчатое поле, размер которого известен. Так же на этом поле могут находится стены и закрашенные клетки, а сам Робот может находится в любой клетке. Так вот —
стартовая обстановка задает положение Робота на поле и расположение всех остальных элементов — стен, закрашенных клеток. И перед тем, как писать алгоритм для Робота необходимо задать стартовую обстановку. Насколько это важно давайте рассмотрим на примере. Пусть есть две стартовые обстановки:Стартовая обстановка 1 | Стартовая обстановка 2 |
Отличаются они только тем, что в стартовой обстановке 2 справа от Робота находится стена.
Если наша программа начнется с команды, которая переместит Робота на одну клетку вправо (о простых командах Робота), то в первом случае (стартовая обстановка 1) Робот выполнит эту команду, а во втором программа завершится аварийно, так как Робот не может ходить сквозь стены. Получается, что одна и та же программа в первом случае работает, а во втором приводит к ошибке. Именно поэтому так важно задавать стартовую обстановку для Робота.
Получается, что одна и та же программа в первом случае работает, а во втором приводит к ошибке. Именно поэтому так важно задавать стартовую обстановку для Робота.
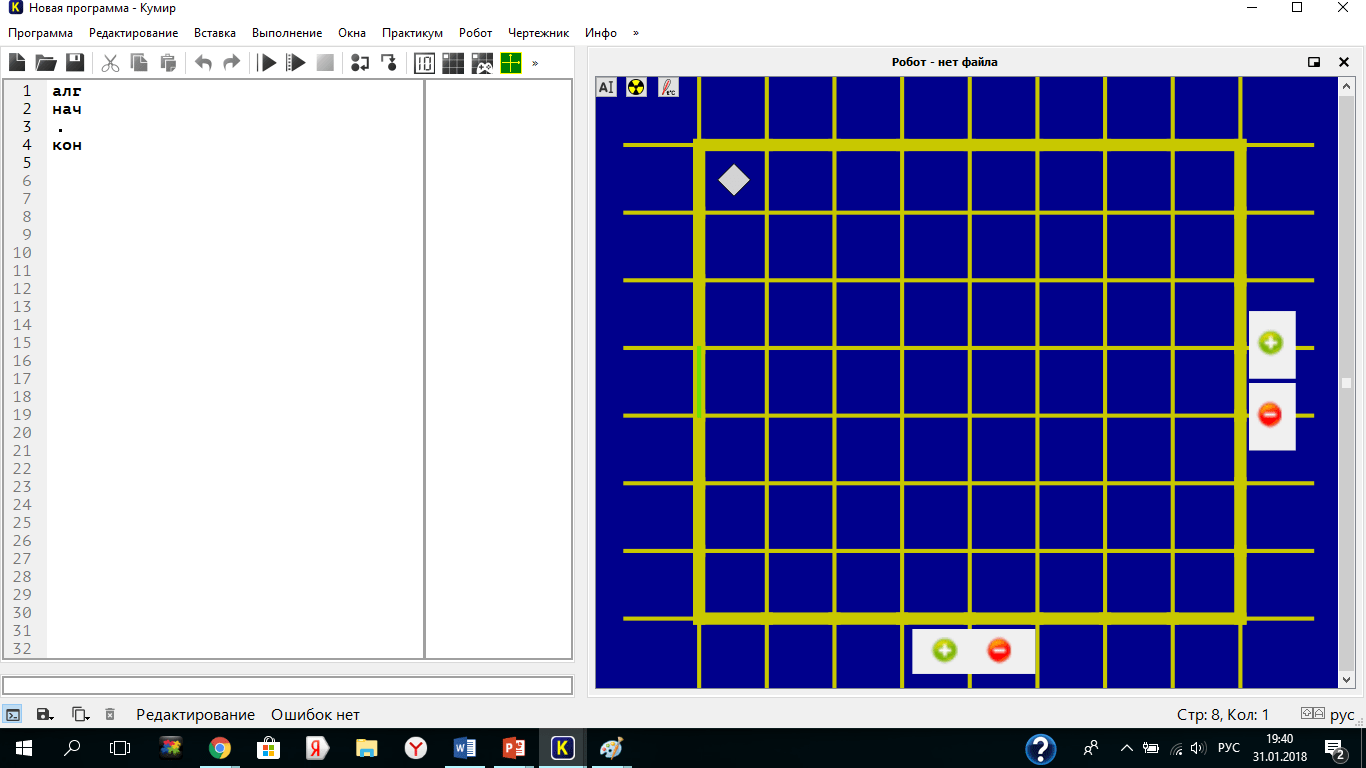
Запустив среду Кумир в меню Инструменты выбираем пункт Редактировать стартовую обстановку Робота
Откроется окно с синим фоном. Это и есть стартовая обстановка Робота. И мы ее можем изменить.
По-умолчанию, размер окна 10 на 15 клеток. Если нам необходимо изменить количество строк и столбцов, то щелкаем Обстановка -> Новая обстановка и задаем необходимые значения
Далее,
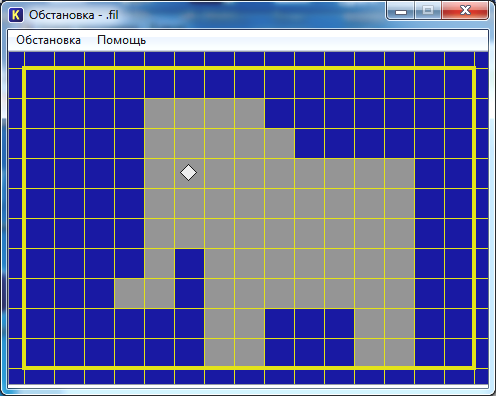
- чтобы переместить Робота в новую позицию, щелкаем по нему левой кнопкой мыши и не отпуская ее тащим Робота в нужное место.
- чтобы добавить/удалить стену, щелкаем левой кнопкой мыши по границе клетки.
- чтобы закрасить/очистить клетку, щелкаем по ней левой кнопкой мыши
- чтобы добавить или убрать точку в клетку щелкаем по клетке, удерживая клавишу Ctrl
После того, как мы задали нужную стартовую обстановку, ее необходимо сохранить (Обстановка -> Сохранить или Обстановка -> Сохранить как). После этого закрываем окно Обстановка и в основном окне программы выбираем Робот -> Сменить стартовую обстановку
После этого закрываем окно Обстановка и в основном окне программы выбираем Робот -> Сменить стартовую обстановку
Находим сохраненную ранее обстановку и загружаем ее. После этого убедимся, что загрузили правильную стартовую обстановку, щелкнув по кнопке Показать окно Робота
Если в окне с зеленым фоном (текущая обстановка Робота) вы увидите вашу обстановку, то можно переходить к написанию алгоритма, используя простые команды Робота.
Исполнитель Робот. Простые команды.
У нашего Робота тоже есть система команд. Сегодня мы рассмотрим простые команды Робота. Всего их 5:
вверх
вниз
влево
вправо
закрасить
Результат выполнения этих команд понятен из их названия:
вверх — переместить Робота на одну клетку вверх
вниз — переместить Робота на одну клетку вниз
влево — переместить Робота на одну клетку влево
вправо — переместить Робота на одну клетку вправо
закрасить — закрасить текущую клетку (клетку в которой находится Робот).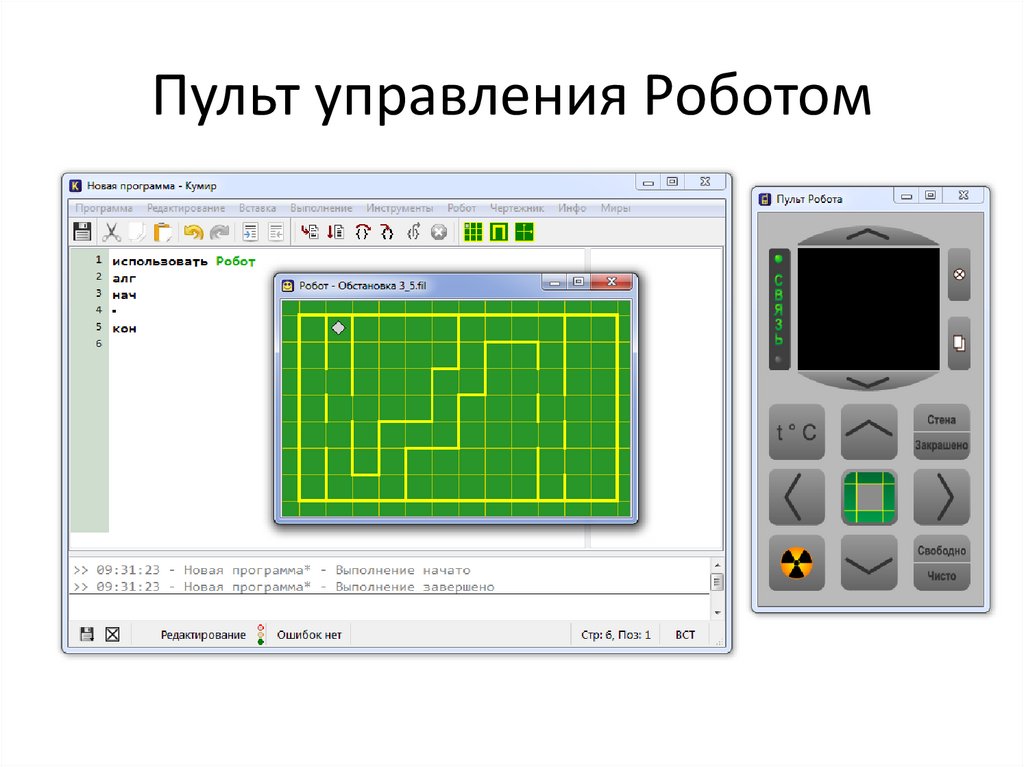
Эти команды можно писать с клавиатуры, а можно использовать горячие клавиши (нажав их команды будут вставляться автоматически):
вверх — Escape, Up (стрелка вверх)
вниз — Escape, Down (стрелка вниз)
влево — Escape, Left (стрелка влево)
вправо — Escape, Right (стрелка вправо)
закрасить — Escape, Space (пробел)
Обратите внимание, что набирать нужную комбинацию горячих клавиш нужно не привычным нам способом! Мы привыкли нажимать клавиши одновременно, а здесь их нужно нажимать последовательно.
Теперь мы готовы написать первый алгоритм для Робота. Предлагаю начать с простого — нарисуем квадрат со стороной 3 клетки. Поехали!
Запускаем Кумир, настраиваем его. Можно начинать писать программу? Конечно нет! Мы же не задали стартовую обстановку! Делаем это. Предлагаю использовать вот такую:
Вот теперь все готово. Начинаем писать программу. Пока она выглядит так
Удаляем символ «|» и называем наш алгоритм «Квадрат»
Предлагаю рисовать квадрат, двигаясь по часовой стрелке. Для начала закрасим текущую клетку, дав команду закрасить. Потом делаем шаг вправо и опять закрашиваем клетку. И еще раз шаг вправо и закрасить.
Для начала закрасим текущую клетку, дав команду закрасить. Потом делаем шаг вправо и опять закрашиваем клетку. И еще раз шаг вправо и закрасить.
Попробуем запустить программу и посмотреть что же получилось. Для запуска нажимаем F9 или же кнопку на панели инструментов
В результате мы должны увидеть вот такую картину
Если такое окно Робота у вас не появилось, то на панели инструментов щелкните «Показать окно Робота» или в меню Робот выберите пункт «Показать окно Робота». Продолжаем дальше.
Теперь мы будем двигаться вниз и закрашивать правую сторону квадрата:
вниз
закрасить
вниз
закрасить
Потом пойдем влево, закрашивая нижнюю границу квадрата
влево
закрасить
влево
закрасить
У нас осталась одна незакрашенная клетка. Закрасим ее
вверх
закрасить
Все готово! В итоге наша программа выглядит так:
использовать Робот
алг Квадрат
нач
закрасить
вправо
закрасить
вправо
закрасить
вниз
закрасить
вниз
закрасить
влево
закрасить
влево
закрасить
вверх
закрасить
кон
А результат ее работы вот так
Итак, сегодня мы с вами написали программу, используя простые команды Робота. Рекомендую попрактиковаться самостоятельно — придумать себе задание и написать программу. Это могут быть самые различные фигуры, узоры, буквы. К примеру, попробуйте написать программу, рисующую букву П, Р, Ш, Щ, М. А если получится и захотите поделиться — комментируйте и прикрепляйте результат к комментарию.
Рекомендую попрактиковаться самостоятельно — придумать себе задание и написать программу. Это могут быть самые различные фигуры, узоры, буквы. К примеру, попробуйте написать программу, рисующую букву П, Р, Ш, Щ, М. А если получится и захотите поделиться — комментируйте и прикрепляйте результат к комментарию.
Исполнитель Робот. Циклы.
Итак, что такое цикл? Представьте, что мы находимся на уроке физической культуры и перед нами стоит задача сделать 7 приседаний. Это задание можно оформить в виде линейного алгоритма и тогда оно будет выглядеть примерно так:
сделай приседание
сделай приседание
сделай приседание
сделай приседание
сделай приседание
сделай приседание
сделай приседание
Т. е мы повторили команду сделай приседание 7 раз. А есть ли смысл писать 7 одинаковых команд? Может проще дать команду сделай 7 приседаний? Конечно проще и правильнее.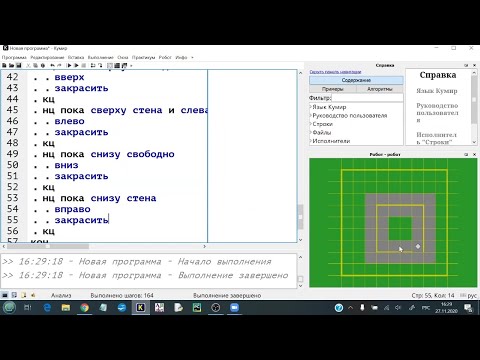 Это и есть цикл. Вы можете сами вспомнить примеры циклов из жизни — их довольно много.
Это и есть цикл. Вы можете сами вспомнить примеры циклов из жизни — их довольно много.
Таким образом линейный алгоритм, где повторяются одни и те же команды мы можем оформить в виде циклического алгоритма — примерно так:
повторяй 7 раз
сделай приседание
конец цикла
Вот так, на придуманном нами языке мы оформили цикл. У исполнителя Робот тоже есть возможность записывать циклы. Причем, циклы бывают разные. Тот вариант, который мы только что рассмотрели называется цикл со счетчиком или цикл с параметром.
Виды циклов.Цикл со счетчиком.Цикл со счетчиком применяется когда заранее известно сколько повторений необходимо сделать. В примере выше с приседаниями именно такой случай.
Для того, чтобы написать цикл со счетчиком для исполнителя необходимо знать его синтаксис. А он такой:
нц <количество повторений> раз
<команда 1>
<команда 2>
…
<команда n>
кц
Здесь мы должны указать количество повторений (число) и команды, которые будут повторяться. Команды, которые повторяются в цикле называют телом цикла.
Команды, которые повторяются в цикле называют телом цикла.
Давайте рассмотрим это на примере.
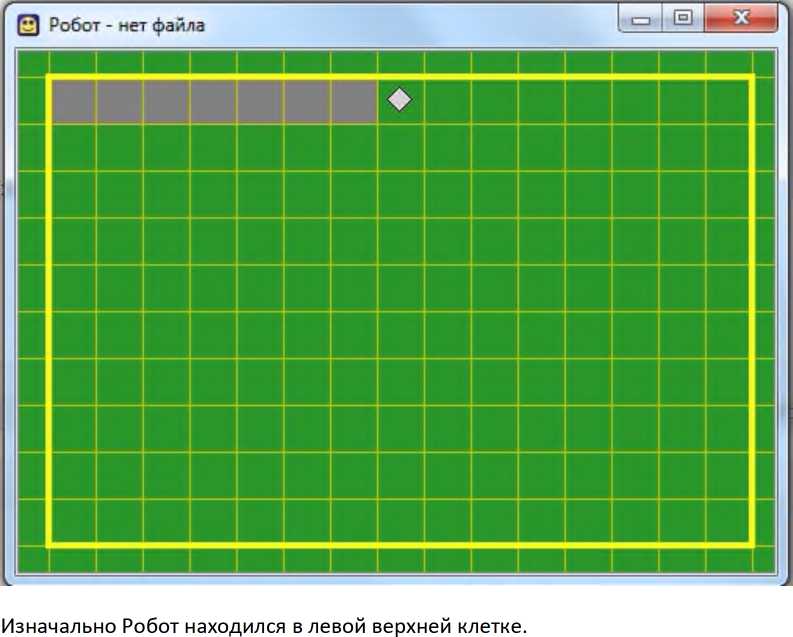
Закрасим 7 клеток, как на рисунке. Рекомендую почитать про стартовую обстановку Робота и про его простые команды.
Изначально Робот находился в левой верхней клетке.
Давайте для начала решим задачу линейно. В этом случае мы будет закрашивать текущую клетку и перемещаться на 1 клетку вправо и программа будет выглядеть так:
использовать Робот
алг
нач
закрасить
вправо
закрасить
вправо
закрасить
вправо
закрасить
вправо
закрасить
вправо
закрасить
вправо
закрасить
вправо
кон
Как видим, команды закрасить и вправо повторяются 7 раз. Давайте теперь перепишем программу с использованием цикла. Кстати, чтобы вставить цикл в свою программу можно в меню Вставка выбрать пункт нц-раз-кц или нажать одну из комбинаций клавиш Esc, Р (русская буква Р) или Esc, H (латинская буква H). Причем клавиши надо нажимать последовательно — сначала Esc, отпустить ее и только потом Р или H.
Давайте теперь перепишем программу с использованием цикла. Кстати, чтобы вставить цикл в свою программу можно в меню Вставка выбрать пункт нц-раз-кц или нажать одну из комбинаций клавиш Esc, Р (русская буква Р) или Esc, H (латинская буква H). Причем клавиши надо нажимать последовательно — сначала Esc, отпустить ее и только потом Р или H.
Так вот, наша программа с циклом будет выглядеть так:
использовать Робот
алг
нач
нц 7 раз
закрасить
вправо
кц
кон
Если мы ее запустим, то увидим, что в результате получится тоже самое — 7 закрашенных клеток. Однако программа стала короче и значительно грамотней с алгоритмической точки зрения!
В качестве разминки и закрепления предлагаю самостоятельно написать программу для Робота, которая нарисует квадрат со стороной 7 клеток.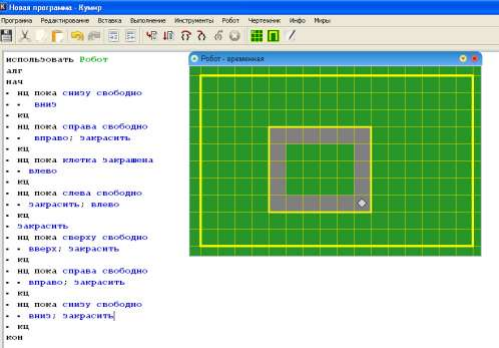 Естественно, используя цикл. Жду решения в комментариях.
Естественно, используя цикл. Жду решения в комментариях.
Вернемся к физкультуре и изменим задачу. Ведь кто-то может и не сделать 7 приседаний, а другой способен сделать 27. Можно ли учесть это при создании цикла? Конечно. Только теперь мы будем использовать не счетчик (количество повторений), а условие. К примеру, пока не устал, делай приседания. В этом случае человек будет делать не конкретное число приседаний, а приседать до тех пор, пока не устанет. И наш цикл на абстрактном языке примет такой вид:
пока не устал
сделай приседание
конец цикла
Слова не устал в нашем случае — это условие. Когда оно истинно, цикл выполняется. Если же оно ложно (устал) тело цикла не будет выполнено. У исполнителя Робот есть несколько условий
сверху свободно
снизу свободно
слева свободно
справа свободно
сверху стена
снизу стена
слева стена
справа стена
Теперь давайте решим следующую задачу для Робота — нарисовать вертикальную линию от левой до правой границы поля использую цикл с условием.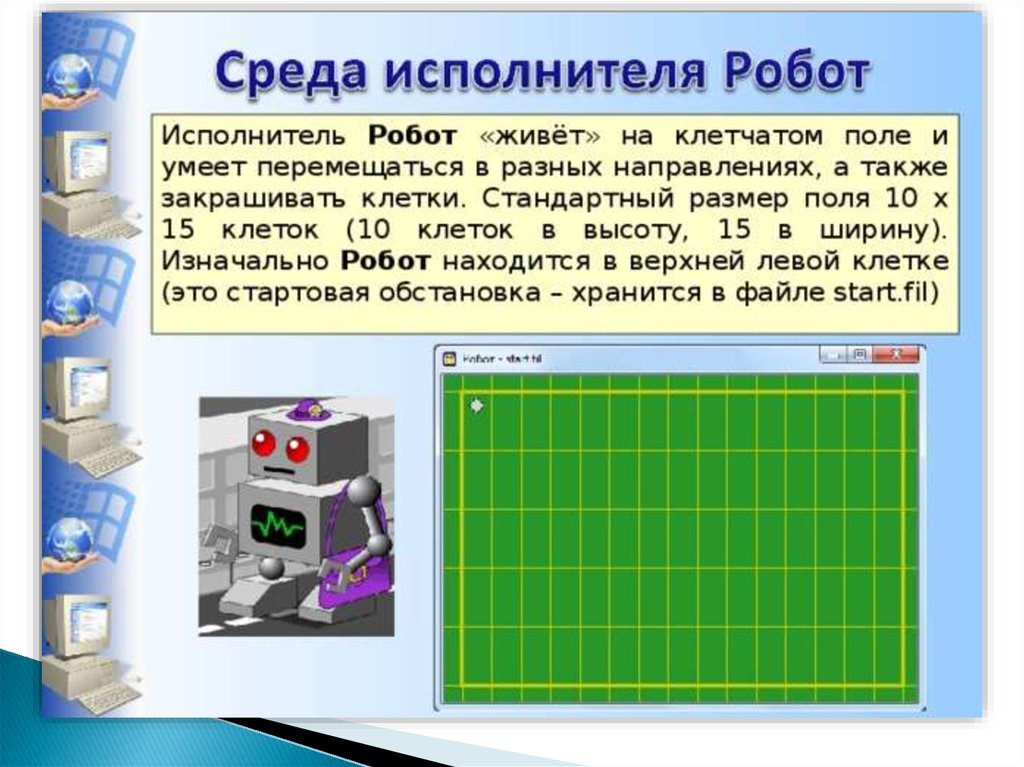 Изначально Робот находится в левом верхнем углу.
Изначально Робот находится в левом верхнем углу.
Давайте сначала сформулируем словесный алгоритм — т. е. опишем словами что нужно делать Роботу. Этот алгоритм будет звучать примерно так:
«Пока справа свободно делай шаг вправо и закрашивай клетку»
В результате Робот пробежит по всем клеткам вправо и будет их закрашивать до тех пор, пока справа не окажется стена.
Исходный код нашей программы для Робота будет примерно такой:
использовать Робот
алг
нач
нц пока справа свободно
вправо
закрасить
кц
кон
В результате выполнения этой программы мы увидим вот такую картину:
Как видим, не хватает только закрашенной первой клетки. Для этого перед циклом необходимо выполнить команду закрасить.
Для закрепления прошу написать программу, которая будет делать рамку вокруг рабочего поля Робота независимо от его размера. Конечно же с использованием циклов с условием. В итоге должно получиться так:
Конечно же с использованием циклов с условием. В итоге должно получиться так:
Исполнитель Робот. Простые команды
На предыдущих уроках мы установили среду Кумир, настроили ее для дальнейшей работы и научились задавать стартовую обстановку Робота. Теперь перейдем непосредственно к составлению алгоритмов для Робота с использованием простых команд.
Если вам больше нравится информация в формате видеоуроков, то на сайте есть видеоурок Робот. Простые команды.
У любого исполнителя должна быть система команд (СКИ — система команд исполнителя). Система команд исполнителя — совокупность всех команд, которые может выполнить исполнитель. В качестве примера рассмотрим дрессированную собаку. Она умеет выполнять некоторые команды — «Сидеть», «Лежать», «Рядом» и т. п. Это и есть ее система команд.
У нашего Робота тоже есть система команд. Сегодня мы рассмотрим простые команды Робота. Всего их 5:
- вверх
- вниз
- влево
- вправо
- закрасить
Результат выполнения этих команд понятен из их названия:
- вверх — переместить Робота на одну клетку вверх
- вниз — переместить Робота на одну клетку вниз
- влево — переместить Робота на одну клетку влево
- вправо — переместить Робота на одну клетку вправо
- закрасить — закрасить текущую клетку (клетку в которой находится Робот).
Эти команды можно писать с клавиатуры, а можно использовать горячие клавиши (нажав их команды будут вставляться автоматически):
- вверх — Escape, Up (стрелка вверх)
- влево — Escape, Left (стрелка влево)
- вправо — Escape, Right (стрелка вправо)
- закрасить — Escape, Space (пробел)
Обратите внимание, что набирать нужную комбинацию горячих клавиш нужно не привычным нам способом! Мы привыкли нажимать клавиши одновременно, а здесь их нужно нажимать последовательно. К примеру, чтобы ввести команду вверх, нужно нажать Escape, отпустить ее и после этого нажать стрелку вверх. Это нужно помнить.
Теперь мы готовы написать первый алгоритм для Робота. Предлагаю начать с простого — нарисуем квадрат со стороной 3 клетки. Поехали!
Запускаем Кумир, настраиваем его. Можно начинать писать программу? Конечно нет! Мы же не задали стартовую обстановку! Делаем это. Предлагаю использовать вот такую:
Стартовая обстановка Робота
Вот теперь все готово.
Первая программа для Робота
Удаляем символ «|» и называем наш алгоритм «Квадрат»
Алгоритм квадрат
Предлагаю рисовать квадрат, двигаясь по часовой стрелке. Для начала закрасим текущую клетку, дав команду закрасить. Потом делаем шаг вправо и опять закрашиваем клетку. И еще раз шаг вправо и закрасить.
Первые шаги
Попробуем запустить программу и посмотреть что же получилось. Для запуска нажимаем F9 или же кнопку на панели инструментов
выполнить программу
В результате мы должны увидеть вот такую картину
Первый результат
Если такое окно Робота у вас не появилось, то на панели инструментов щелкните «Показать окно Робота» или в меню Робот выберите пункт «Показать окно Робота«. Продолжаем дальше.
Теперь мы будем двигаться вниз и закрашивать правую сторону квадрата:
вниз
закрасить
вниз
закрасить
Потом пойдем влево, закрашивая нижнюю границу квадрата
влево
закрасить
влево
закрасить
У нас осталась одна незакрашенная клетка.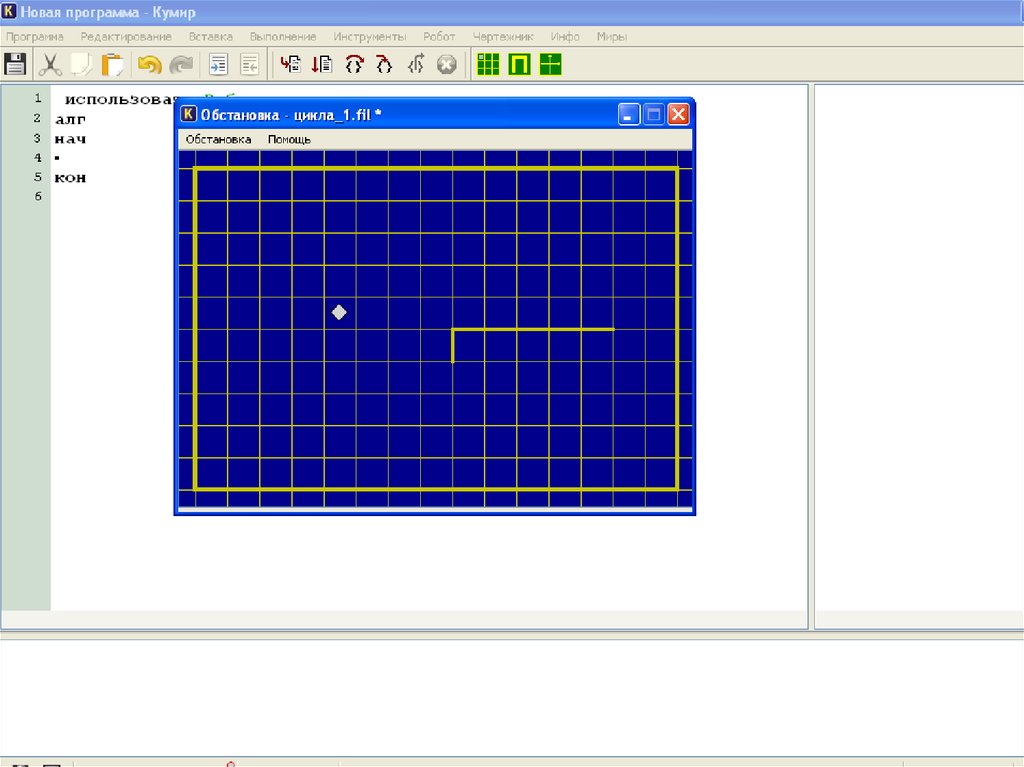 Закрасим ее
Закрасим ее
вверх
закрасить
Все готово! В итоге наша программа выглядит так:
использовать Робот
алг Квадрат
нач
закрасить
вправо
закрасить
вправо
закрасить
вниз
закрасить
вниз
закрасить
влево
закрасить
влево
закрасить
вверх
закрасить
кон
А результат ее работы вот так
Результат работы программы
Итак, сегодня мы с вами написали программу, используя простые команды Робота. Рекомендую попрактиковаться самостоятельно — придумать себе задание и написать программу. Это могут быть самые различные фигуры, узоры, буквы. К примеру, попробуйте написать программу, рисующую букву П, Р, Ш, Щ, М. А если получится и захотите поделиться — комментируйте и прикрепляйте результат к комментарию.
К примеру, попробуйте написать программу, рисующую букву П, Р, Ш, Щ, М. А если получится и захотите поделиться — комментируйте и прикрепляйте результат к комментарию.
Автор: Александр Чернышов
Руководство по программированию собственных роботов
Основные выводы по программированию роботов:
- Робототехника включает в себя проектирование, конструирование и эксплуатацию интеллектуальных машин, называемых роботами .
- Слово робот происходит от славянского слова робота , что означает слуга.
- Основными областями робототехники являются операторский интерфейс, передвижение, эффекторы, программирование и восприятие.
- Программирование роботов — это разработка схемы управления тем, как машина взаимодействует с окружающей средой и достигает своих целей.
- Операционная система для роботов — это промежуточное программное обеспечение — набор программных сред для разработки программного обеспечения для роботов .

- Программное обеспечение для управления роботами — это программа для управления роботами.
- Популярные языки программирования в робототехнике включают C/C++, Python, JAVA, C#/.NET, MATLAB и другие.
Программирование роботов быстро приобретает большое значение, поскольку все больше компаний проявляют интерес и инвестируют в роботов .
Согласно отчетам, глобальные технологии робототехники, которые в 2019 году оценивались в 62,75 миллиарда долларов, к 2027 году достигнут 170,08 миллиарда долларов. В результате спрос на программистов роботов также вырастет в ближайшее десятилетие.
Вот тут и начинается этот пост. Хотя в нем не рассматриваются практические детали программирования робота , в этой статье рассматриваются основы.
Что такое робототехника?
Робототехника относится к междисциплинарной области исследований на стыке науки, техники и технологий. Цель исследования — разработать машины, которые будут не только воспроизводить человеческие действия, но и в конечном итоге заменять людей. В результате робототехника включает проектирование, конструирование и эксплуатацию интеллектуальных машин , называемых роботами . Такие машины полезны в различных отраслях промышленности, таких как аэрокосмическая , здравоохранение , электронная коммерция , исследование космоса и транспорт , среди прочих.
Цель исследования — разработать машины, которые будут не только воспроизводить человеческие действия, но и в конечном итоге заменять людей. В результате робототехника включает проектирование, конструирование и эксплуатацию интеллектуальных машин , называемых роботами . Такие машины полезны в различных отраслях промышленности, таких как аэрокосмическая , здравоохранение , электронная коммерция , исследование космоса и транспорт , среди прочих.
Слово робот происходит от славянского слова robota , что означает слуга. Но Карел Чапек — чешский писатель — первым использовал термин «робот» в своей пьесе 1920 года « RUR» («Универсальные роботы Россума») .
В то время Чапек использовал этот термин для описания созданных на фабрике особей, которых можно принять за людей. Действительно, это похоже на современное представление об андроидах или гуманоидах.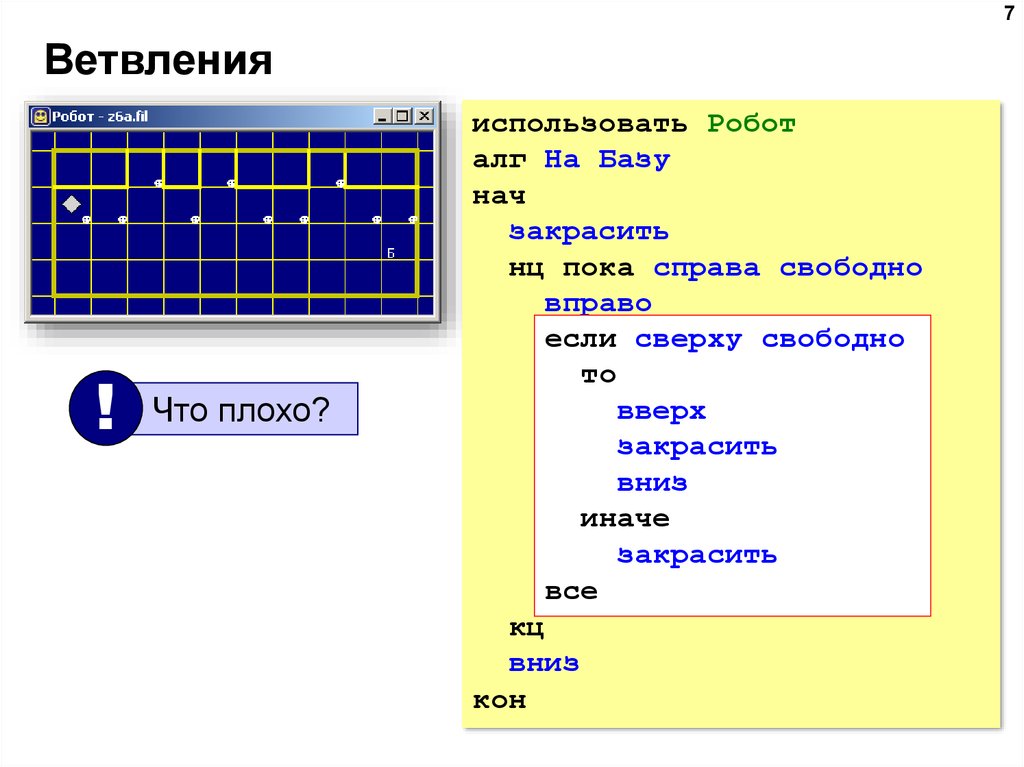
Сегодня робототехника является одной из самых быстрорастущих областей исследований. Переходя от сценария чешского писателя, робототехника теперь разделена на различные области.
Пять основных областей робототехники
Фотографии Хобби / Unsplash.comОпыт команды инженеров необходим для создания передового робота . По этой причине основными областями робототехники являются интерфейс оператора, мобильность или передвижение, манипуляторы и эффекторы, программирование, восприятие и восприятие.
1. Интерфейс оператора
Интерфейс оператора относится к взаимодействию между роботом и его человеком-контроллером. Это механизм связи между человеком и его машиной.
Например, джойстик контроллер служит операторским интерфейсом между игроком и консолью.
2. Подвижность или передвижение
Подвижность или передвижение описывает, как робот перемещается из одного места в другое в пределах заданного пространства. И зависит от типа машины.
И зависит от типа машины.
Например, летающие роботы и дроны используют пропеллеры для движения. Точно так же гуманоида ходят на двух ногах, как люди. Другие варианты мобильности включают плавники и колеса.
3. Манипуляторы и эффекторы
Это особый компонент машины, который делает ее идеальной для выполнения определенных задач. К таким частям могут относиться толкатели, когти, захваты, механические руки и пальцы.
Например, промышленных роботов обычно оснащены захватами с двумя пальцами для перемещения предметов.
4. Ощущение и восприятие
Ощущение и восприятие сосредоточены на том, как машина идентифицирует объекты в своей среде и реагирует на эти факторы. Благодаря этому полю робот может получить доступ к такой информации, как:
- Где находится
- Куда пойти
- Как избежать препятствий
Например, когда робот сталкивается с препятствием, в каком направлении он должен двигаться. Программисты загружают такие компоненты в машину, чтобы помочь ей принять правильное решение.
Программисты загружают такие компоненты в машину, чтобы помочь ей принять правильное решение.
5. Программирование
Программирование относится к командам, которые позволяют роботам работать в определенной ситуации. Он включает разработку и создание исполняемой компьютерной программы для выполнения определенных задач.
Сегодня существует более тысячи языков для программирования роботов . Чтобы понять, как работает эта область робототехники, мы должны копнуть немного глубже.
Что такое программирование роботов?
Герд Альтманн / Pixabay.com Программирование роботов относится к процессу разработки схемы управления тем, как машина взаимодействует с окружающей средой и достигает своих целей. Обычно для этого требуются базовые знания математики и языка программирования . Например, Python — один из самых популярных сегодня языков программирования роботов.
Помимо разработки машинного обучения, Python также можно использовать для создания пакетов Robot Operating System . Прежде чем мы рассмотрим другие языки программирования, давайте сначала рассмотрим программное обеспечение.
Какое программное обеспечение используется для программирования роботов
Операционная система роботов (ROS)
Операционная система роботов — это промежуточное программное обеспечение — набор программных сред для разработки ПО для роботов . Хотя это и не операционная система, ROS предоставляет услуги, предназначенные для гетерогенного компьютерного кластера.
К ним относятся:
- Аппаратная абстракция
- Низкоуровневое управление устройством
- Реализация часто используемых функций
- Обмен сообщениями между процессами
- Управление пакетами
Например, проект с открытым исходным кодом ROS-Industrial расширяет возможности ROS для автоматизации производства и робототехники. Таким образом, его репозиторий включает интерфейсы, уникальные для промышленных роботов.
Таким образом, его репозиторий включает интерфейсы, уникальные для промышленных роботов.
К ним относятся промышленные манипуляторы, захваты, датчики и сети устройств.
Важнейшим преимуществом операционной системы робота является то, как программное обеспечение работает и взаимодействует. Это позволяет программистам разрабатывать передовое программное обеспечение, не зная, как работает конкретное оборудование.
ROS в настоящее время выпускает новую версию каждый май после выпуска версий Ubuntu LTS . Аналогично ROS2 выпускает новую версию каждые полгода — в декабре и июле.
Программное обеспечение для управления роботами
Как вы уже догадались, программное обеспечение для управления роботами — это программа для управления роботами. Это набор закодированных команд, которые сообщают машине, какие задачи выполнять автономно.
Некоторые повседневные задачи, которыми управляет программное обеспечение робота, включают петли обратной связи, фильтрация данных, местоположение и данные совместное использование .
Программное обеспечение для роботов носит исключительно частный характер. Таким образом, производители роботов оборудования обычно должны предоставлять собственное программное обеспечение для работы с машиной.
Как научиться программировать робототехнику?
Крис Рид / Unsplash.comИз более чем 1500 языков программирования в мире только десять популярны в области робототехники. К ним относятся Pascal, Scratch, язык промышленных роботов, LISP и Пролог . Также есть C/C++, Python, JAVA, C#/.NET, MATLAB, и Hardware Description Language .
Вот список языков программирования роботов в порядке полезности.
1. Pascal
Pascal — это базовый язык, буквально основанный на языке BASIC , разработанный для поощрения хороших методов программирования. Это потому, что он использует структурированное программирование и структурирование данных.
Этот язык программирования также является основой для нескольких из языки промышленных роботов . По этой причине это отличная отправная точка для тех, кто хочет запрограммировать промышленных роботов .
Хотя Pascal может быть слишком устаревшим для повседневного использования, он может помочь вам познакомиться с другими языками для промышленных роботов . Таким образом, вы можете изучить различные бренды роботов .
2. Scratch
Scratch чрезвычайно популярен среди начинающих робототехников , и на то есть веские причины. визуальный язык программирования по существу включает в себя перетаскивание и соединение блоков.
В результате он идеально подходит для начинающих программистов — пользователей в возрасте от восьми до шестнадцати лет. Кроме того, Scratch является языком выбора в большинстве клубов робототехники и школьных уроков технологии.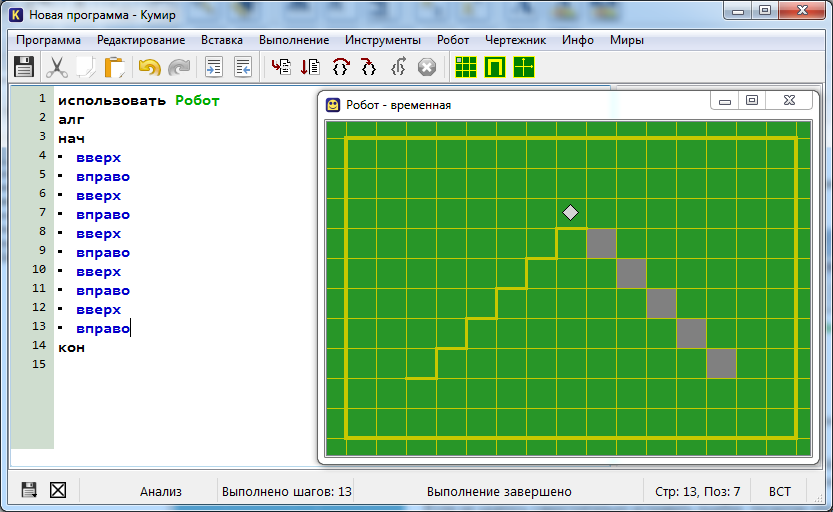
Большинство опытных робототехников вряд ли напишут какие-то промышленных роботов на Scratch. Тем не менее, язык предоставляет новичкам полезный способ освоить робототехнику.
3. Языки промышленных роботов
Сегодня почти каждый робот поставляется с собственным языком программирования роботов .
Как вы уже догадались, это давняя проблема промышленной робототехники. Это означает, что пользователям приходится изучать новый язык каждый раз, когда они используют новый робот марки .
Например, роботы Fanuc используют Karel, Yaskawa используют INFORM , Kuka имеет KRL (Kuka Robot Language) и ABB имеет свой RAPID язык программирования . Список можно продолжить.
Некоторые среды программирования общего назначения, такие как ROS Industrial, начинают предлагать стандартизированные опции. Тем не менее, технические специалисты, скорее всего, будут использовать собственный язык.
Тем не менее, технические специалисты, скорее всего, будут использовать собственный язык.
4. LISP и Prolog
В последнее время область искусственного интеллекта стала более популярной. В результате различные языки программирования AI теперь пользуются большим вниманием, чем когда-либо прежде. LISP и Prolog — два таких языка.
LISP — один из первых языков программирования. В результате он стал пионером многих идей в информатике, таких как автоматическое управление памятью, условные операторы, рекурсия и функции более высокого порядка.
Тем временем Prolog был одним из первых языков логического программирования . Помимо того, что Prolog оказался полезным для обработки естественного языка , он также используется для доказательства теорем, экспертных систем и автоматизированного планирования.
Действительно, можно запрограммировать искусственный интеллект , используя другие языки из этого списка. Однако LISP и Prolog являются неотъемлемой частью некоторых реализаций ИИ.
Однако LISP и Prolog являются неотъемлемой частью некоторых реализаций ИИ.
Также стоит отметить, что робототехника и ИИ — это две разные области.
5. Язык описания аппаратного обеспечения
Инженеры, создающие низкоуровневую электронику для роботов, используют языки описания аппаратного обеспечения для описания своих прототипов.
Благодаря HDL программисты могут быстро описать схему, используя слова и символы. Затем программное обеспечение для разработки может преобразовать это текстовое описание в данные конфигурации для реализации.
Наиболее популярными языками описания оборудования являются Verilog и VHDL . И они широко используются для программирования программируемых вентильных матриц (FPGA) .
6. MATLAB
Инженеры робототехники полагаются на MATLAB для анализа данных и разработки систем управления. Помимо обработки данных, некоторые университетские курсы также используют этот язык программирования в исследовательских целях.
Однако робототехника инженеры использовать MATLAB и Simulink для проектирования для различных целей. К ним относятся:
- Алгоритмы настройки
- Модели реальных систем
- Автоматическая генерация кодов
Кроме того, они выполняют эти функции из одной программной среды.
7. C# /.NET
C# — это собственный язык программирования от Microsoft . Это основной язык Microsoft Robotics Developer Studio — среды на базе Windows для робот управление и моделирование.
Таким образом, исследователи, которые хотят использовать систему, должны изучить C#. Кроме того, язык программирования также служит основой для некоторых популярных движков виртуальной реальности , таких как Unity .
С учетом сказанного C# может оказаться не самым простым языком программирования для изучения. Попробуйте начать с C/C++.
Попробуйте начать с C/C++.
8. JAVA
Java — это основанный на классах объектно-ориентированный язык программирования общего назначения. Он разработан, чтобы позволить разработчикам приложений написать один раз и запустить где угодно (WORA) .
Другими словами, код JAVA может выполняться на любой платформе, поддерживающей JAVA, без необходимости перекомпиляции. Таким образом, становится возможным использовать один и тот же код на разных машинах.
JAVA весьма полезна в некоторых аспектах робототехники . Например, это один из основных языков современных ИИ, таких как AlphaGo и IBM Watson .
9. Python
Python — один из самых популярных языков программирования благодаря быстрорастущей области машинного обучения. На самом деле IEEE Spectrum назвал его лучшим языком программирования в 2019 году.
Существенным преимуществом этого языка программирования является простота использования. С Python вещи, которые занимают время в программировании, такие как определение и приведение типов переменных, становятся ненужными.
С Python вещи, которые занимают время в программировании, такие как определение и приведение типов переменных, становятся ненужными.
Кроме того, для Python доступно большое количество бесплатных библиотек. В результате программистам не придется «изобретать велосипед» для реализации некоторых базовых функций.
Python полезен в робототехнике, потому что это один из основных языков программирования в ROS (помимо C++). Тем не менее, он может стать еще более популярным, поскольку более электроника для роботов поддерживает этот язык по умолчанию.
10. C/C++
C и C++ являются языками программирования номер один в робототехнике , и по очевидным причинам.
Несколько аппаратных библиотек в робототехнике используют C или C++. Кроме того, эти библиотеки позволяют взаимодействовать с низкоуровневым оборудованием . И они также поддерживают производительность в реальном времени.
Сегодня C++, возможно, более полезен в робототехнике , чем C.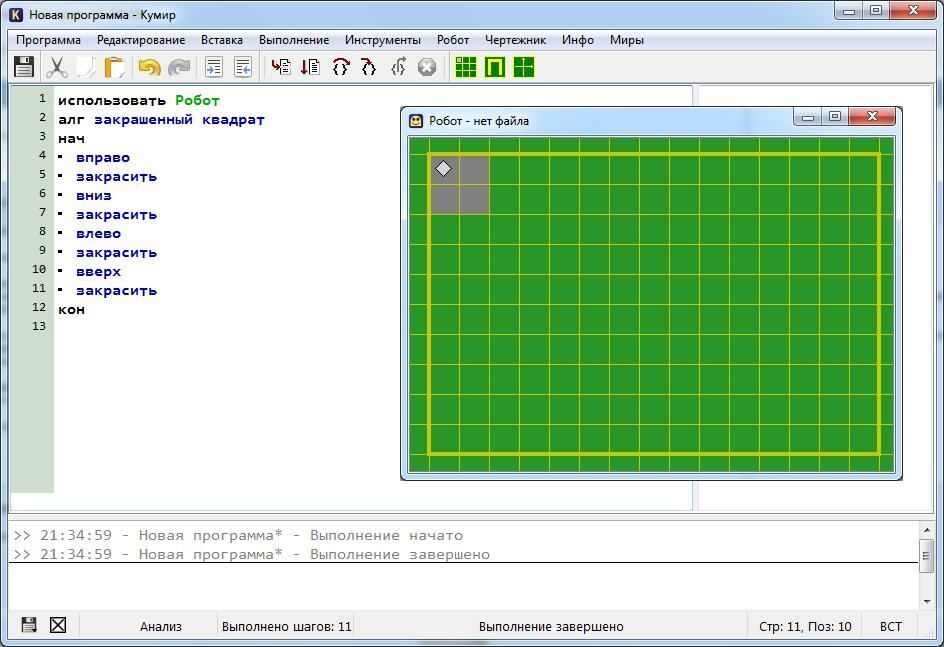 Однако последний остается одним из самых энергоэффективных доступных языков программирования.
Однако последний остается одним из самых энергоэффективных доступных языков программирования.
Обратите внимание, что C/C++ не так просты в использовании, как Python или MATLAB. Для реализации той же функциональности с помощью C требуется не только больше времени, но и больше строк кода.
Однако робототехника в значительной степени зависит от производительности в реальном времени. В результате C и C++ ближе всего к стандартному языку программирования роботов .
Заключительное слово: Какой язык программирования роботов вам следует выучить? Робо-вундеркинд / Unsplash.com
Основываясь на этом посте, вы можете сделать вывод, что изучение Python или C/C++ должно быть первым шагом. Хотя этот вывод может быть точным, ответ не так прост.
Правильным ответом было бы изучение любого языка программирования, который в настоящее время имеет для вас наибольшее значение. Вот почему.
В начале вы должны сосредоточиться только на разработке приемлемых методов программирования. Хотя для этого может потребоваться изучение многих языков, вам нужно выбрать только тот, который кажется вам естественным.
Хотя для этого может потребоваться изучение многих языков, вам нужно выбрать только тот, который кажется вам естественным.
Такой язык должен позволять быстро и легко разрабатывать программы. Однако он также должен подходить к вашему роботизированному оборудованию .
Для большинства людей этот язык программирования — Python. Его легко освоить и он мощный — благодаря массивным библиотекам. После Python вы можете изучить C и C++ для взаимодействия с драйверами роботизированного оборудования .
Однако, если вам меньше 16 лет или у вас нет опыта программирования, вы можете начать с нуля — без каламбура.
Подробнее: Игры с программированием для детей: увлекательный способ научиться компьютерному программированию
Программирование роботов — MATLAB и Simulink
Программирование роботов включает в себя написание компьютерных программ, которые позволяют роботу воспринимать окружающую среду, планировать и принимать решения, а также выполнять задачи . Например, для программирования наземного робота для автономной навигации внутри здания требуются датчики и восприятие, локализация и картографирование, планирование и отслеживание пути, управление исполнительными механизмами и другие задачи.
Например, для программирования наземного робота для автономной навигации внутри здания требуются датчики и восприятие, локализация и картографирование, планирование и отслеживание пути, управление исполнительными механизмами и другие задачи.
Программирование роботов обычно включает:
- Предоставление роботу возможности воспринимать окружающую среду с помощью компьютерного зрения и алгоритмов глубокого обучения для обнаружения, классификации и отслеживания объектов, а также оценки движения
- Обеспечение автономности роботов с помощью алгоритмов одновременной локализации и картирования (SLAM), предотвращения столкновений и планирования движения
- Управление поведением робота путем разработки систем управления, таких как управление с прогнозированием модели, управление вычисляемым крутящим моментом и отслеживание пути
- Связь и взаимодействие с датчиками и исполнительными механизмами, подключенными к различным встроенным платформам, таким как ЦП, ГП, ПЛИС и микроконтроллеры
Приступая к программированию роботов, инженеры часто разрабатывают диаграмму конечного автомата предполагаемого поведения робота. Кроме того, для разработки алгоритмов используются такие языки программирования, как C/C++, Python ® , Java ® и MATLAB ® , а промежуточное программное обеспечение, такое как операционная система роботов (ROS), используется для аппаратной абстракции, низкоуровневой управление устройствами, обмен сообщениями между процессами и развертывание оборудования.
Кроме того, для разработки алгоритмов используются такие языки программирования, как C/C++, Python ® , Java ® и MATLAB ® , а промежуточное программное обеспечение, такое как операционная система роботов (ROS), используется для аппаратной абстракции, низкоуровневой управление устройствами, обмен сообщениями между процессами и развертывание оборудования.
Стандартный рабочий процесс программирования роботов.
Ошибка на одном шаге часто может повлиять на весь рабочий процесс программирования робота. Моделирование и симуляция в программном обеспечении помогают устранить ошибки реализации, выявляя проблемы во время прототипирования, а не при производстве роботов или, что еще хуже, при их использовании в реальной среде. Моделирование системы также помогает инженерам усовершенствовать конструкцию системы, настраивая параметры управления, не беспокоясь о зависимости от платформы или имея доступ к оборудованию робота.
MATLAB предоставляет несколько встроенных алгоритмов и функций для программирования роботов. Например, с помощью всего нескольких строк готовых алгоритмов глубокого обучения в MATLAB роботы могут идентифицировать объекты в окружающей среде (2:38). Simulink ® предоставляет готовые блоки для использования моделирования и симуляции с модельно-ориентированным проектированием для программирования роботов. Например, блоки ROS в Simulink позволяют программистам роботов подписываться на данные датчиков и публиковать команды роботов по сети ROS без написания кода.
Например, с помощью всего нескольких строк готовых алгоритмов глубокого обучения в MATLAB роботы могут идентифицировать объекты в окружающей среде (2:38). Simulink ® предоставляет готовые блоки для использования моделирования и симуляции с модельно-ориентированным проектированием для программирования роботов. Например, блоки ROS в Simulink позволяют программистам роботов подписываться на данные датчиков и публиковать команды роботов по сети ROS без написания кода.
Использование блоков ROS для публикации и подписки на сообщения в Simulink. См. пример.
Используя MATLAB и Simulink для программирования роботов, вы можете создать масштабируемую симуляцию робота для создания прототипа, тестирования концептуальных моделей и отладки с минимальными затратами. Затем вы можете использовать модели высокой точности для проверки, сохраняя при этом остальные алгоритмы в той же среде моделирования. Как только желаемый результат будет получен при моделировании робота, вы можете сгенерировать автономный исполняемый код для встроенной системы из модели Simulink на распространенных языках программирования.