Какие бывают типы промышленных роботов. Как устроен промышленный робот внутри. Кто является лидерами в производстве промышленных роботов. Какие компоненты входят в состав робота.
Основные типы промышленных роботов
Промышленные роботы можно классифицировать по нескольким признакам, но наиболее распространенной является классификация по типу кинематической схемы. Выделяют 6 основных типов промышленных роботов:
- Сферические (полярные) роботы
- Цилиндрические роботы
- Декартовы (линейные) роботы
- Шарнирные (сочлененные) роботы
- SCARA роботы
- Параллельные (дельта) роботы
Каждый тип робота имеет свои особенности конструкции, преимущества и области применения. Рассмотрим их подробнее.
Сферические (полярные) роботы
Сферические роботы имеют центральный поворотный вал и удлиняющуюся руку с вращающимся запястьем. Они работают в сферической системе координат. Такие роботы были популярны на заре промышленной робототехники из-за простоты конструкции. Сегодня они практически не используются.

Цилиндрические роботы
Цилиндрические роботы похожи на сферических, но их рука движется вертикально линейным, а не вращательным движением. Они работают в цилиндрической системе координат. Применяются для перемещения тяжелых грузов на небольшие расстояния, например, для загрузки станков.
Декартовы (линейные) роботы
Декартовы роботы имеют три линейных оси движения, соответствующие осям X, Y и Z декартовой системы координат. Они просты в программировании и обеспечивают высокую точность. Используются для задач перемещения, сборки, 3D-печати.
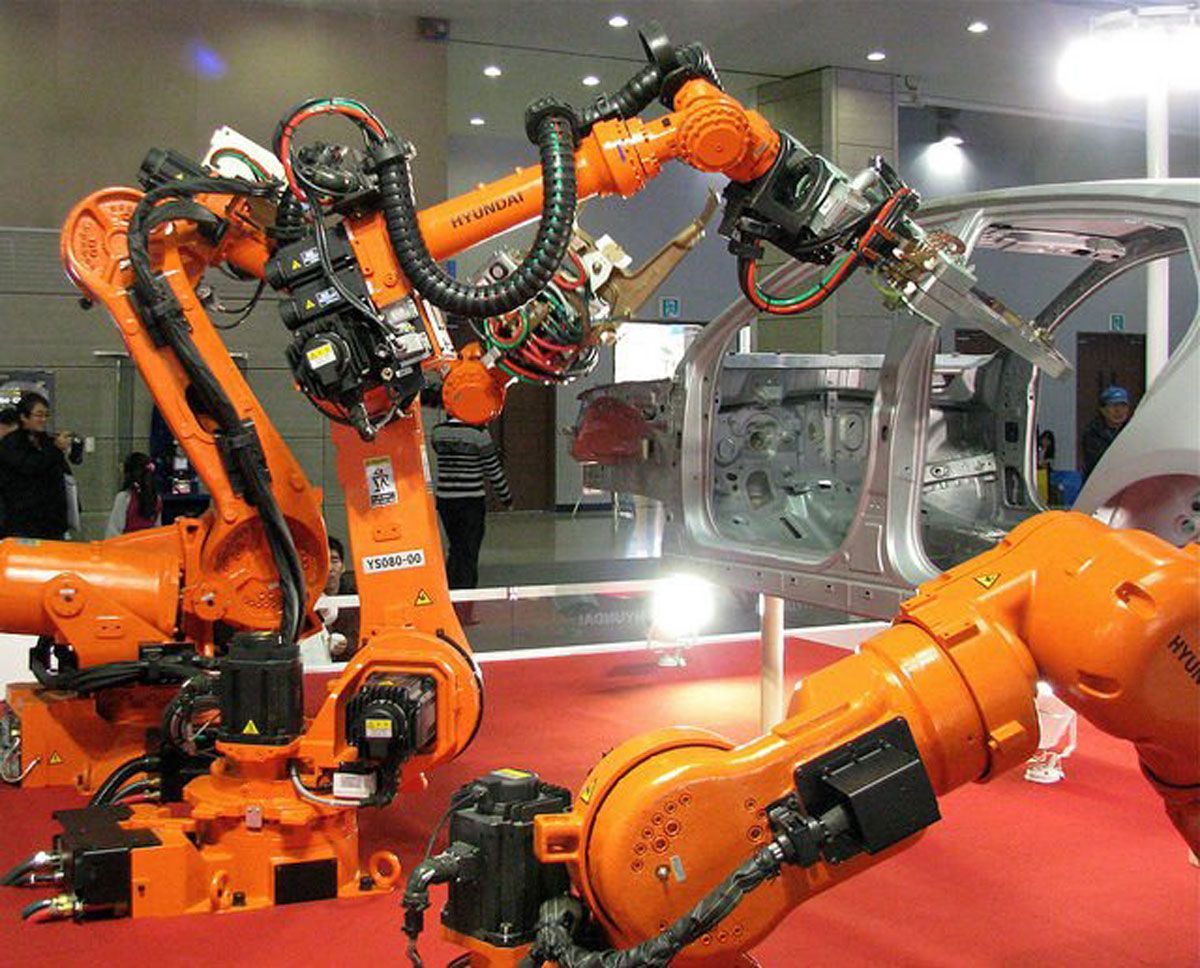
Шарнирные (сочлененные) роботы
Шарнирные роботы — наиболее распространенный тип. Они имеют от 4 до 6 вращательных сочленений, что обеспечивает высокую гибкость движений. Применяются для широкого круга задач — сварки, окраски, сборки, паллетирования и др.
SCARA роботы
SCARA роботы (Selective Compliance Assembly Robot Arm) имеют два параллельных шарнирных соединения для горизонтального перемещения и вертикальную ось для подъема. Они быстры и точны в плоскости, но ограничены по вертикали. Используются для сборки электроники, упаковки, перемещения небольших предметов.

Параллельные (дельта) роботы
Параллельные роботы имеют несколько рычагов, соединенных с общим основанием и рабочим органом. Это обеспечивает высокую скорость и точность. Применяются для высокоскоростной сортировки, упаковки, погрузки-разгрузки.
Внутреннее устройство промышленного робота
Промышленный робот — сложное электромеханическое устройство. Рассмотрим основные компоненты, из которых он состоит:
Звенья и суставы
Звенья — это жесткие элементы конструкции робота, соединенные между собой подвижными сочленениями (суставами). Суставы обеспечивают подвижность робота и могут быть вращательными или поступательными. Количество и тип суставов определяют степени свободы и рабочую зону робота.
Приводы
Приводы обеспечивают движение звеньев робота. Они состоят из двигателя и редуктора. В промышленных роботах чаще всего используются электрические сервоприводы, реже — гидравлические или пневматические. Мощность и точность приводов во многом определяют характеристики робота.
Редукторы
Редукторы служат для увеличения крутящего момента и снижения скорости вращения двигателей. Они позволяют использовать более компактные и легкие двигатели. В роботах применяются различные типы редукторов — циклоидные, волновые, планетарные.
Энкодеры
Энкодеры — это датчики, определяющие положение и скорость вращения приводов. Они необходимы для точного управления движением робота. Используются оптические, магнитные или резольверные энкодеры. Современные роботы оснащаются абсолютными многооборотными энкодерами.
Контроллер
Контроллер — это «мозг» робота, управляющий всеми его системами. Он обрабатывает сигналы с датчиков, рассчитывает траектории движения, управляет приводами. Современные контроллеры строятся на базе мощных промышленных компьютеров.
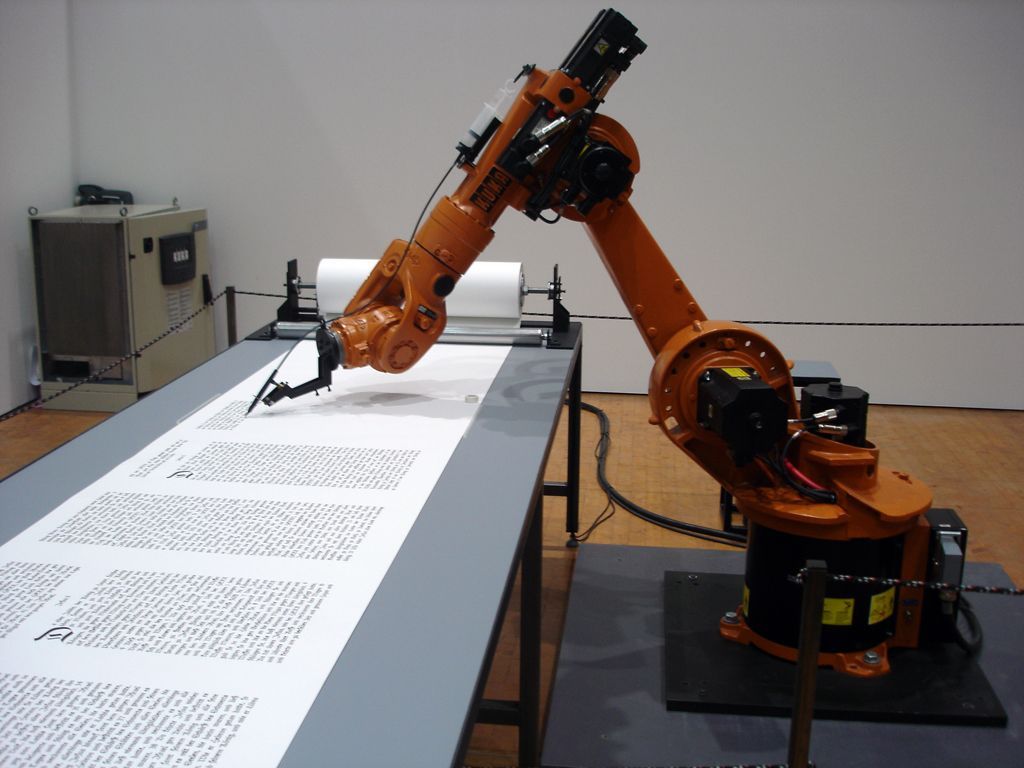
Рабочий орган
Рабочий орган (инструмент) крепится к последнему звену робота и выполняет полезную работу. Это может быть захват, сварочная горелка, краскопульт, шпиндель и т.д. Часто используются устройства автоматической смены инструмента.
Ведущие производители промышленных роботов
На рынке промышленной робототехники выделяется несколько компаний-лидеров, которые на протяжении десятилетий определяют развитие отрасли. Рассмотрим крупнейших производителей роботов.
ABB Robotics
ABB — швейцарская компания, один из пионеров промышленной робототехники. Производит широкую линейку роботов грузоподъемностью от 0.5 до 800 кг. Роботы ABB легко узнаваемы по белому цвету с красным логотипом. Компания занимает около 20% мирового рынка.
FANUC
FANUC — японская компания, крупнейший производитель промышленных роботов в мире. Выпускает роботы грузоподъемностью от 0.5 до 2300 кг. Роботы FANUC имеют характерный ярко-желтый цвет. Доля компании на мировом рынке около 25%.
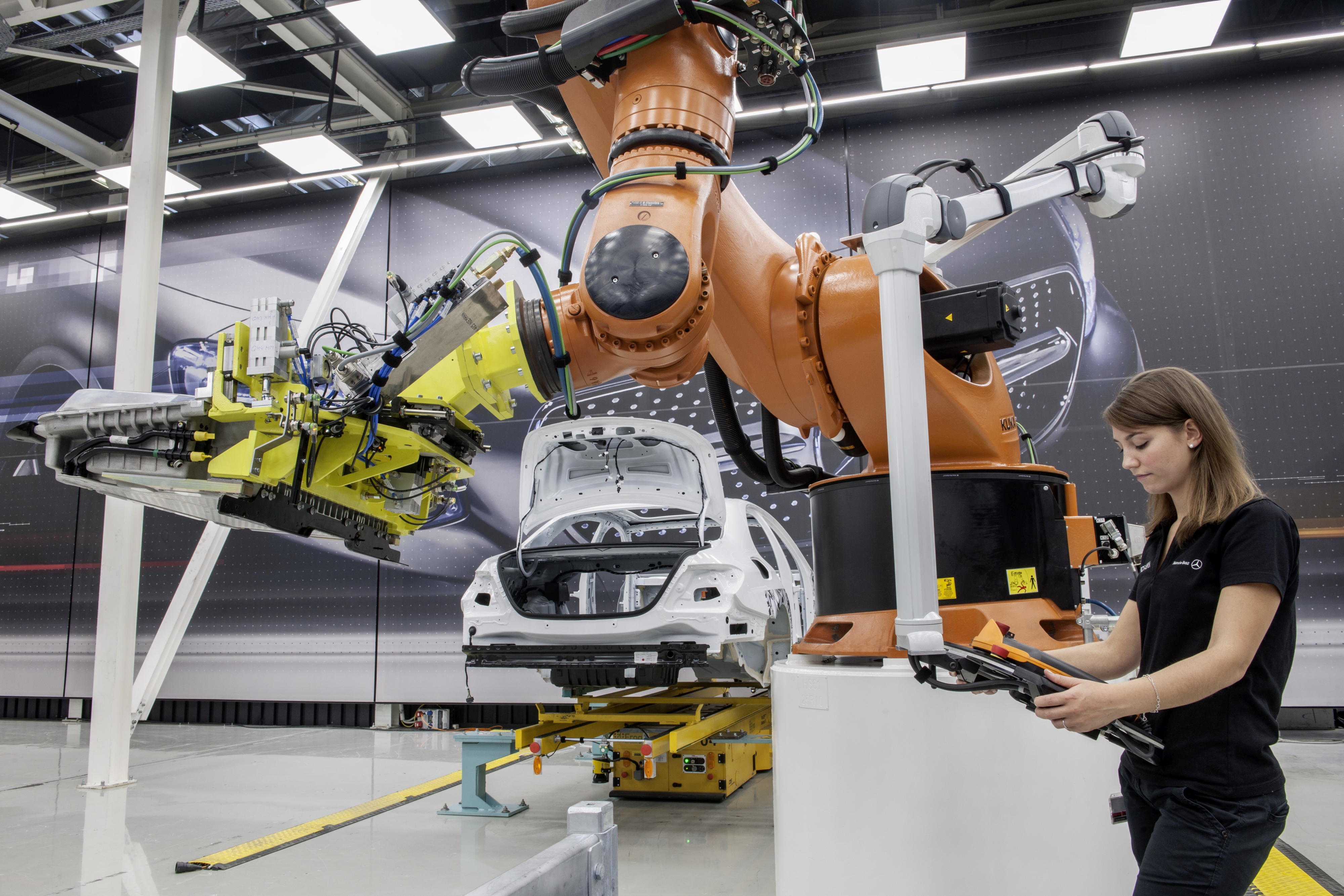
KUKA
KUKA — немецкая компания с более чем столетней историей. Производит роботы грузоподъемностью от 3 до 1300 кг. Роботы KUKA узнаваемы по оранжевому цвету. Компания занимает около 14% мирового рынка.
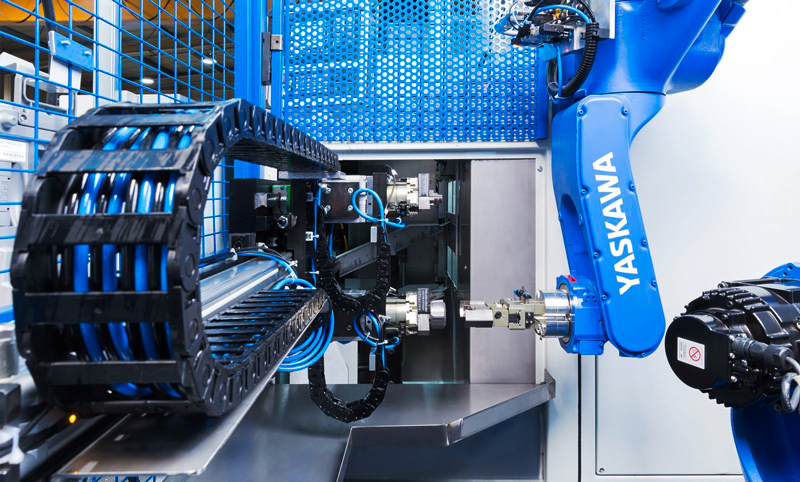
Yaskawa Motoman
Yaskawa — японская компания, выпускающая роботов под брендом Motoman. Производит широкую линейку роботов грузоподъемностью от 2 до 800 кг. Роботы Motoman имеют бело-синюю окраску. Доля компании на мировом рынке около 12%.
Kawasaki Robotics
Kawasaki — японская компания, известный производитель промышленных роботов. Выпускает роботы грузоподъемностью от 3 до 1500 кг. Роботы Kawasaki окрашены в серебристый цвет. Компания занимает около 6% мирового рынка.
Помимо перечисленных, заметную долю рынка занимают такие компании как Staubli, Comau, Epson, Universal Robots, Omron. Выбор конкретного производителя зависит от задач, бюджета и предпочтений заказчика.
Сферы применения промышленных роботов
Промышленные роботы находят применение практически во всех отраслях производства. Основные сферы их использования:
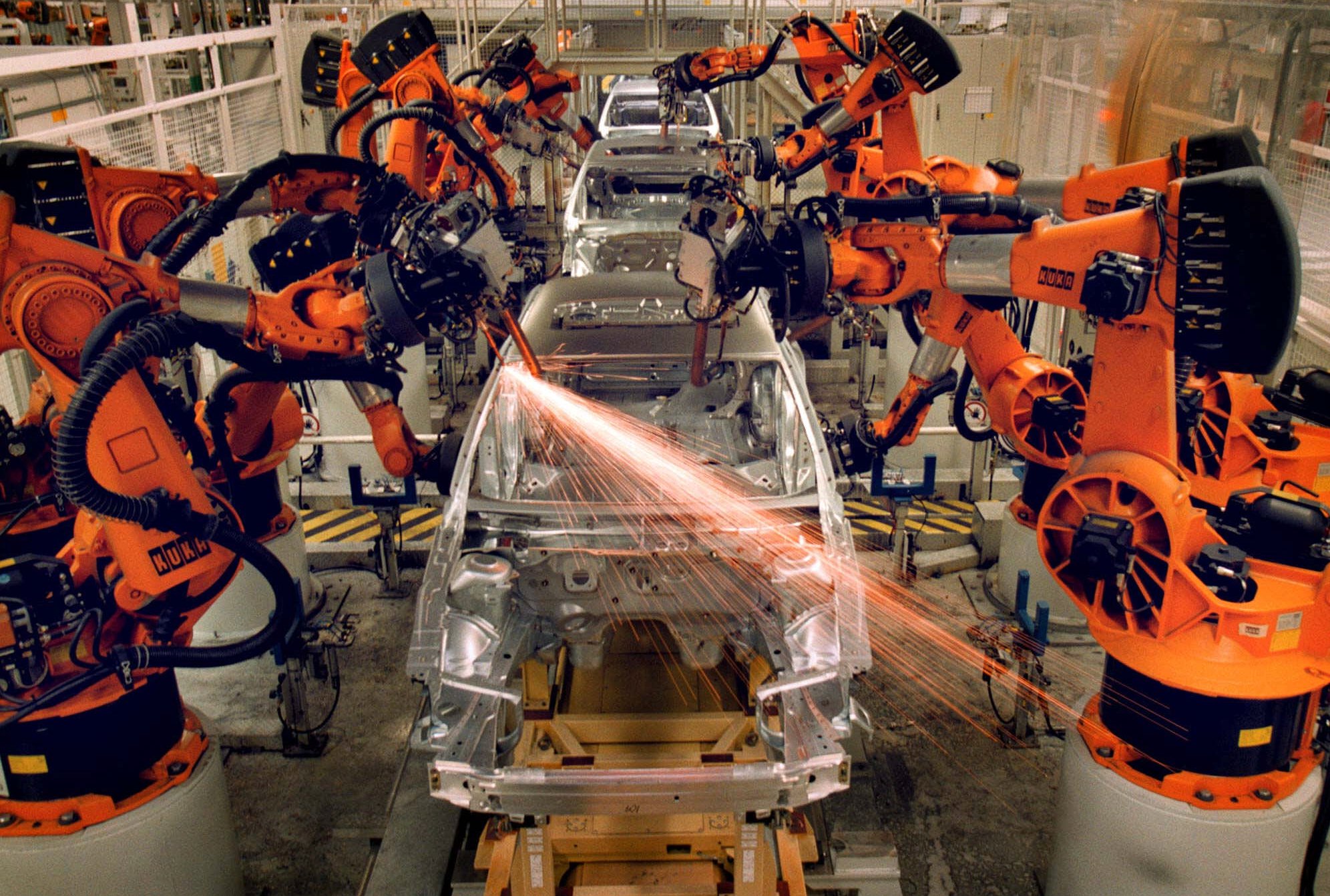
- Автомобилестроение
- Электроника и электротехника
- Металлообработка
- Пищевая промышленность
- Фармацевтика
- Химическая промышленность
- Аэрокосмическая отрасль
Роботы выполняют различные технологические операции:
- Сварка
- Окраска
- Сборка
- Паллетирование
- Упаковка
- Фрезерование
- Контроль качества
Применение роботов позволяет повысить производительность, качество и гибкость производства, снизить влияние человеческого фактора, улучшить условия труда.
Преимущества и недостатки промышленных роботов
Внедрение промышленных роботов имеет как положительные, так и отрицательные стороны. Рассмотрим основные преимущества и недостатки роботизации производства.
Преимущества промышленных роботов:
- Высокая производительность и скорость работы
- Стабильное качество продукции
- Возможность круглосуточной работы
- Гибкость и быстрая переналадка
- Работа в опасных условиях
- Экономия на оплате труда в долгосрочной перспективе
- Освобождение людей от монотонного труда
Недостатки промышленных роботов:
- Высокая стоимость внедрения
- Необходимость квалифицированного обслуживания
- Сложность программирования
- Ограниченная адаптивность к изменениям
- Потенциальное сокращение рабочих мест
- Зависимость от электроэнергии
- Психологический барьер у персонала
При правильном внедрении преимущества роботизации обычно перевешивают недостатки, особенно в долгосрочной перспективе.

Тенденции развития промышленной робототехники
Промышленная робототехника — быстро развивающаяся отрасль. Основные тенденции ее развития:
- Увеличение грузоподъемности и рабочей зоны роботов
- Повышение точности и скорости перемещений
- Развитие систем машинного зрения и искусственного интеллекта
- Упрощение программирования и интеграции роботов
- Расширение применения коллаборативных роботов
- Внедрение промышленного интернета вещей (IIoT)
- Развитие мобильных робототехнических платформ
Эти тенденции способствуют расширению сфер применения роботов и делают их более доступными для малого и среднего бизнеса.
Как выбрать промышленного робота
Выбор промышленного робота — ответственная задача. При этом нужно учитывать множество факторов:
- Тип решаемых задач
- Требуемая грузоподъемность
- Необходимая рабочая зона
- Требования к точности и скорости
- Условия эксплуатации
- Совместимость с имеющимся оборудованием
- Возможность интеграции и программирования
- Стоимость робота и его обслуживания
- Репутация производителя и наличие поддержки
Правильный выбор робота позволит максимально эффективно решить производственные задачи и получить быструю окупаемость инвестиций.

Какими бывают промышленные роботы? Шесть основных типов.
Содержание:
- Вступление
- Типы роботов
- Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
- Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
- Линейный робот (Декартов робот, Cartesian robot)
- Шарнирный робот (ARTICULATED ROBOT)
- SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
- Параллельный робот (Дельта робот, робот-паук)
- Заключение
Вступление
Первый промышленный робот в Японии был произведён полвека назад. В 1968 году компания Kawasaki Heavy Industries подписала лицензионное соглашение с американской венчурной компанией Unimation и начала собственное производство в Японии. Первый японский промышленный робот под названием «Kawasaki-Unimate 2000» был выпущен в 1969 году.
С этого момента производство промышленных роботов, преимущественно сфокусированное на автомобильной промышленности, начало набирать обороты. Компания Kawasaki стала одним из крупнейших производителей промышленных роботов, заняв большую долю на мировом рынке и создав основу для того, чтобы Япония стала всемирно признанным «Королевством робототехники». Можно считать, что промышленная робототехника родилась в США, но выросла в Японии.
Компания Kawasaki стала одним из крупнейших производителей промышленных роботов, заняв большую долю на мировом рынке и создав основу для того, чтобы Япония стала всемирно признанным «Королевством робототехники». Можно считать, что промышленная робототехника родилась в США, но выросла в Японии.
Промышленных роботов можно разделить на 6 основных типов.
Сегодня промышленные роботы используются не только в автомобильной промышленности, но и при сборке электроники, и в пищевом производстве. Роботы успешно используются для решения многих задач: сварка, покраска, сборка, паллетирование. Для того, чтобы наилучшим способом адаптироваться к каждому типу задачи — промышленные роботы бывают различных типов, различных конструкций и с разными функциями.
Несмотря на большое разнообразие, решаемых роботом, задач, и вариаций конструкции, выделяют 6 основных типов роботов.
Разница заключается в типе соединения и механической конструкции.
Существуют различные способы структуризации промышленных роботов: по размеру, нагрузке, сфере применения. В этой статье мы остановимся на структуризации по типу соединения звеньев робота и механической конструкции.
Оси робота как суставы человека
У роботов могут быть и вращательные и линейные оси. Количество соединений в роботе является количеством осей или степеней свободы (DOF). Количество и типы соединений звеньев робота будет для нас основным фактором, позволяющим нам определить тип робота.
Можно найти много схожего в строении суставов робота и человека. Чаще всего двигатели вращают суставы робота, подобно как мышцы вращают запястье человек или сгибают руку в локте. Но есть и то, что у человека нет – это линейные соединения звеньев робота, позволяющие выдвигать вперёд/назад или верх/вниз сустав робота.
У каждого промышленного робота есть инструмент, который, как правило, крепится на запястье – это может быть сварочная горелка или захват. Для перемещения инструмента требуется как минимум три сустава, чтобы двигаться по трем осям координат. Для ориентирования сустава с инструментом, потребуется ещё 3 оси.
Для перемещения инструмента требуется как минимум три сустава, чтобы двигаться по трем осям координат. Для ориентирования сустава с инструментом, потребуется ещё 3 оси.
Теперь вы знаете основы, перейдем к основным типам роботов.
Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
Первый промышленный робот
Kawasaki-Unimate 2000 выпущенный в 1969 году
Этот робот имеет центральный поворотный вал как у башни танка и удлиняющуюся руку с вращающимся запястьем. Рука, способная удлиняться предназначена для достижения большого радиуса действия. Такой тип роботов широко использовался на заре промышленной робототехники. Робот Kawasaki-Unimate 2000, как раз этого типа.
Ниже редкое видео демонстрирующее работу первого японского промышленного робота Kawasaki-Unimate 2000
Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
Робот с 50-летней историей.
На фото робот Kawasaki TL420
для работы с жидкокристаллической стеклянной подложкой.
Этот робот похож на робота с полярной системой координат — у него также есть выдвигающаяся рука и поворотный вал. Но разница заключается в движении руки робота, которая может двигаться по вертикали, скользящим линейным, а не вращающимся движением. Сегодня роботы этого типа по-прежнему используются, например, для переноса LCD панелей для мониторов.
Линейный робот (Декартов робот) (Cartesian robot)
.Простой в управлении.
Робот, работающий в прямоугольной системе координат. Движения этого робота похожи на игровой автомат, в котором нужно достать игрушку. Все звенья робота двигаются по трём перпендикулярным осям и не вращаются. Как правило, такой робот имеет большие габариты, но высокую точность и простоту в управлении. Этот тип роботов чаще применяется для перемещения тяжелых инструментов, а в качестве инструмента можно использовать даже целого робота.
На видео, пример конструкции с линейными осями с подвешенным шарнирным роботом Kawasaki
Шарнирный робот (ARTICULATED ROBOT)
Высокая гибкость движений
На фото универсальный робот Kawasaki CX210L
с грузоподъемностью 210 кг
Сегодня это самый распространенный промышленный робот. Конструкция представляет собой последовательно соединённые звенья. Каждое следующее звено крепится к концу другого. 6-ти осевой шарнирный робот имеет такую же подвижность, как и человеческая рука. Но считается, что программирование таких роботов гораздо сложнее. Однако, благодаря современным контроллерам Kawasaki, процесс создания управляющей программы чрезвычайно прост. Этот тип роботов используется для очень широкого круга задач, таких как палетирование, обслуживание станков, дуговая или точечная сварка и многое другое.
Пример современного 6-ти осевого шарнирного робота Kawasaki RS007L.
SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
Сборщик
На фото двурукий робот Kawasaki duAro1
Этот робот отличается тем, что все основные звенья перемещаются только в горизонтальной плоскости. И только инструмент на конце руки двигается в линейном направлении. За счёт высокой жесткости в вертикальном направлении роботы SCARA достигают высокой точности и скорости с двигателями меньшей мощности. Роботы с такой конструкцией наиболее востребованы в операциях по сборке. К примеру, SCARA робот duAro успешно применяется на заводах по сборке печатных плат и размещению полупроводниковых пластин.
На видео ниже представлена работа двухрукого робота DuAro. Робот собирает печатные платы.
Параллельный робот (Дельта робот, робот-паук)
Когда скорость важна
На фото высокоскоростной робот Kawasaki YF003N
Ключевым отличием таких роботов является конструкция из нескольких звеньев, прикрепленных к общему основанию, позволяющий сохранять пространственную ориентацию инструмента робота. Чаще всего дельта робот состоит из трёх таких рычагов. Все три рычага одновременно поддерживают захват робота на одинаковой высоте. Обладают высокой скоростью и применяются для операций сортировки или укладки цельной продукции в короба, и, как правило, устанавливается над конвейером.
На видео показано как робот YF03N сортирует листки базилика по размеру.
Заключение
Все вышеперечисленные роботы являются промышленными, но каждый отличается своими характеристиками: грузоподъёмностью, диапазоном рабочей зоны, точностью, скоростью, габаритами.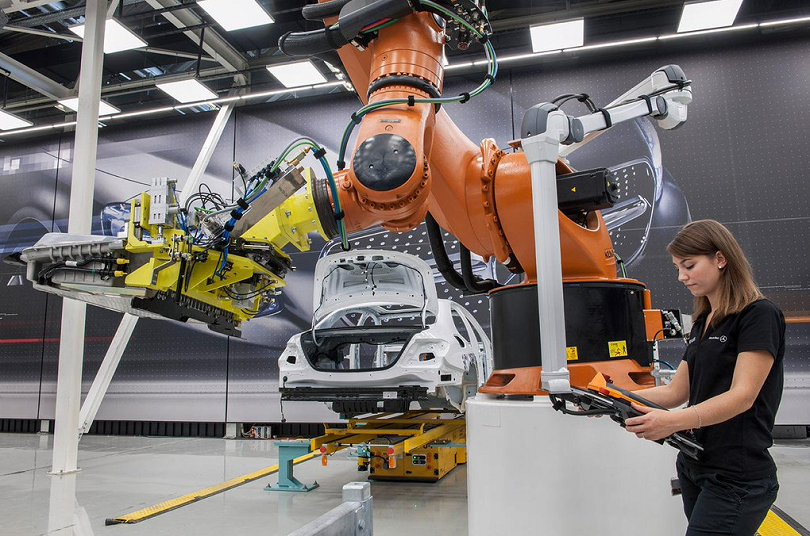 В зависимости от типа соединения звеньев и конструкции каждый робот находит своё оптимальное применение, свою задачу с которой справляется лучше других.
В зависимости от типа соединения звеньев и конструкции каждый робот находит своё оптимальное применение, свою задачу с которой справляется лучше других.
При автоматизации вашего конкретного процесса важно понимать различные доступные варианты решения задачи, чтобы вы могли выбрать лучший тип промышленного робота под вашу задачу.
Если вы хотите обсудить, какой тип роботов лучше всего подходит для вашей конкретной задачи, свяжитесь с нами по телефону 8(812)209-11-03 или по адресу [email protected]
Навигация по статье:
- Вступление
- Типы роботов
- Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
- Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
- Линейный робот (Декартов робот, Cartesian robot)
- Шарнирный робот (ARTICULATED ROBOT)
- SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
- Параллельный робот (Дельта робот, робот-паук)
- Заключение
Как устроен промышленный робот? Краткий гид по структуре и движениям робота
1.
 Роботы и человек. Так ли они отличаются?
Роботы и человек. Так ли они отличаются?Несмотря на кажущееся различие человека и промышленного робота, у них есть немало общего. Первое очевидное сходство – это суставы, места соединений костей человека и звеньев у робота, которые придают им подвижность. В основе промышленного робота лежит человеческая рука. Посмотрите на нее: кости и суставы в плече, локте и запястье, благодаря которым рука может свободно сгибаться и двигаться. По этому же принципу работает и робот, только вместо костей — звенья. Кроме того человека и робота объединяет и принцип передачи энергии звеньев к суставам для их движения.
Плечевой и локтевой суставы, кости – это звенья.
Роботы условно подразделяются на два типа в зависимости от расположения звеньев: 1) последовательно соединенные звенья и 2) независимые, параллельно соединенные звенья. Примером последовательного соединения (сочленения) является человеческая рука, поскольку ее суставы и звенья — плечо, предплечье и кисть — соединены последовательно друг за другом плечевым, локтевым и запястным суставами.
Существуют и более расширенные классификации промышленных роботов, которые рассматривают типы соединения и движение звеньев. Более подробно с видами промышленных роботов можно познакомиться в нашей статье
Какими бывают промышленные роботы? Шесть основных типов.
Рассмотрим принципы движения и внутреннюю структуру промышленных роботов.
2. Сравнение движения робота и человека
Рассмотрим механику движений робота шарнирного типа с последовательным соединением звеньев, который конструктивно схож с рукой человека.
Промышленный вертикальный шарнирный робот с последовательным соединением звеньев содержит, как правило, 6 суставов (осей).
На следующем изображении наглядно показано сравнение движений робота и человека.
Оси с 1 по 3 — это туловище и рука человека, а с 4 по 6 оси — запястье и кисть. Первые три оси перемещают кисть в пространстве, а следующие три оси двигают ей. Шестиосевая конструкция дает роботам свободу движения, даже большую, чем человеческой руке.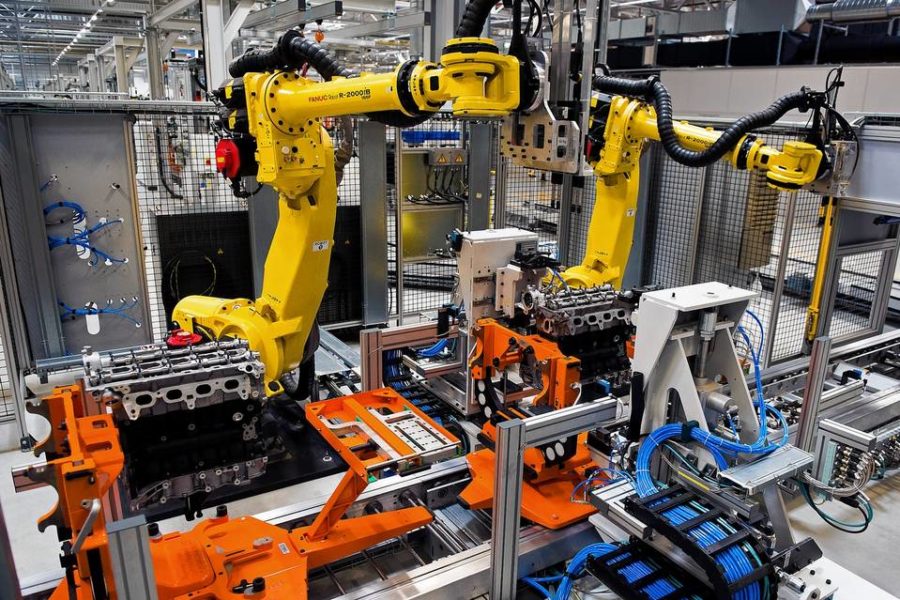
Предлагаем наглядно это посмотреть на видео.
3. Что нужно для движений робота? Структура робота
Далее мы рассмотрим внутреннее строение промышленного робота.
На рисунке ниже показана схема универсального шарнирного робота Kawasaki серии R малой и средней грузоподъёмности. Роботы серии R применяются для широкого спектра задач, от сборки электронных устройств до дуговой сварки. У роботов этой серии предусмотрено размещение кабелей и пневмотрубок внутри корпуса, благодаря чему удалось избежать возможных помех при работе дополнительного оборудования. Но, несмотря на это, роботы этой серии отличаются компактностью и высокой скоростью движений всех звеньев. Этот робот незаменим там, где нужен короткий цикл операций, в чем можно убедиться, симулировав работу робота в виртуальной среде, при офф-лайн программировании.
На рисунке выше наглядно видно, из чего состоит робот. Это металлическое основание робота, корпуса 1го, 2го, 3го звеньев, запястье, моторы, оборудованные энкодерами, редукторы и ременные передачи. Остановимся подробней на этих элементах робота.
Остановимся подробней на этих элементах робота.
I. Звенья
Корпус промышленного робота – сложносоставной и состоит из отдельных звеньев. Самое нижнее, нулевое звено – это основание робота. К нему через редуктор первой оси крепится, корпус первого звена, а к корпусу первого звена, через редуктор второй оси, корпус второго звена. Третье звено при помощи редуктора третьей оси, крепится к корпусу второго звена. Четвертое, пятое и шестое звенья образуют модуль называемый запястье. Запястье крепится к корпусу третьего звена через редуктор четвёртой оси.
II. Редукторы
Каждый сустав (или ось) робота состоит из мотора и редуктора. Этот узел принято называть приводом. Физически функцию сустава (сочленения), соединяющего два соседних звена робота, несут редукторы. Они представляют собой, как правило, законченное механическое устройство, с корпусом в виде составного цилиндра. С одной стороны редуктор крепится к звену N, где установлен мотор, с другой стороны к редуктору крепится корпус звена N+1.
Редукторы нижних осей (с первой по третью) обычно имеют полую середину для того чтобы сквозь них можно было провести электрические провода и пневматические трубки для следующих осей и исполнительного органа (инструмента) робота. Однако, основной задачей редуктора является увеличение силы вращения мотора, за счет снижения скорости вращения. Внутри редуктора находится множество механических передач разного рода, устроенных таким образом, чтобы вращение вала двигателя преобразовывалось в более мощное вращение на выходе из редуктора, но с меньшей скоростью. Таким образом, уменьшая вращение мотора в 10 раз, можно достичь десятикратного увеличения мощности привода. Подобный принцип используется в велосипедной системе переключения передач. Велосипеды имеют разные размеры передних и задних звёздочек. Переключение передачи происходит переставлением цепи на звездочки разных размеров на заднем колесе.
Когда выбрана высокая передача и число оборотов колес минимизировано, усилий для вращения педалей требуется меньше, но необходимо увеличить интенсивность их вращения, но ехать по крутым склонам становиться намного проще. Таким образом итоговая мощность увеличивается, при меньшей работе приводов, в данном примере, работе ног на педалях.
Таким образом итоговая мощность увеличивается, при меньшей работе приводов, в данном примере, работе ног на педалях.
В видео описан принцип работы современного редуктора используемый в роботах.
III. Моторы
Звенья сочленённые посредством редукторов приводятся в движение, и удерживаются в определенном положении при помощи сервомоторов (серводвигателей)
Привод, функционирующий в суставе робота, позволяет перемещать руку вверх, вниз или вращать ею, преобразуя электроэнергию в механическое движение. Чаще всего в приводах роботов Kawasaki используются сервомоторы. Расположение серводвигателей в роботах серии R отмечено красными кружками на изображении ниже.
Сервомоторы — это высокопроизводительные моторы, способные точно контролировать положение и скорость, но не каждый тип сервомотора подойдет для современного промышленного робота, так как есть ряд строгих требований, например, точность перемещения до 0,01мм.
Как правило, самым распространенным источником энергии для приводов является электричество, но в некоторых моделях роботов встречается использование гидравлической или пневматической тяги. Некоторые гидравлические приводы уникальны тем, что они могут генерировать большую мощность, сохраняя высокую степень надежности.
Кстати, во роботах Kawasaki для тяжелой нагрузки используются высокопроизводительные сервомоторы переменного тока.
IV. Энкодер
Энкодер — это устройство, которое указывает положение (угол) вала вращения двигателя. При наличии энкодера, можно получить четкие данные о том, как и в каком направлении движется робот.
Самый простой – оптический энкодер, который представляет из себя диск с отверстиями, расположенными по окружности на одинаковом расстоянии друг от друга, и прикрепленный к вращающемуся валу двигателя. Перпендикулярно к двигателю расположены с одной стороны два светодиода, а с обратной стороны – фотодиод для считывания интенсивности света от светодиодов.
Когда двигатель вращается вместе с диском энкодера, свет от диодов проходит через щели или блокируется, поэтому угол и скорость вращения можно определить путем считывания сигналов с фотодиода. Это позволяет сервомоторам точно контролировать положение и скорость.
В роботах Kawasaki установлены высокоточные многооборотные абсолютные энкодеры с 32 битным разрешениям кодовых дисков. Даже при выключенном питании от контроллера, такой энкодер всегда будет фиксировать поворот в том числе более 360° так, как будет питаться от батарейки в руке робота. Поэтому при случайном сдвиге, при транспортировке или монтаже, не потребуется дополнительно настраивать изначальное положение звеньев робота.
V. Трансмиссия, ременная передача
Трансмиссия или ременная передача — является компонентом, который передает крутящий момент, вырабатываемый приводами и редукторами и преобразует его в движение робота. Трансмиссия также способна изменять направление и величину мощности привода.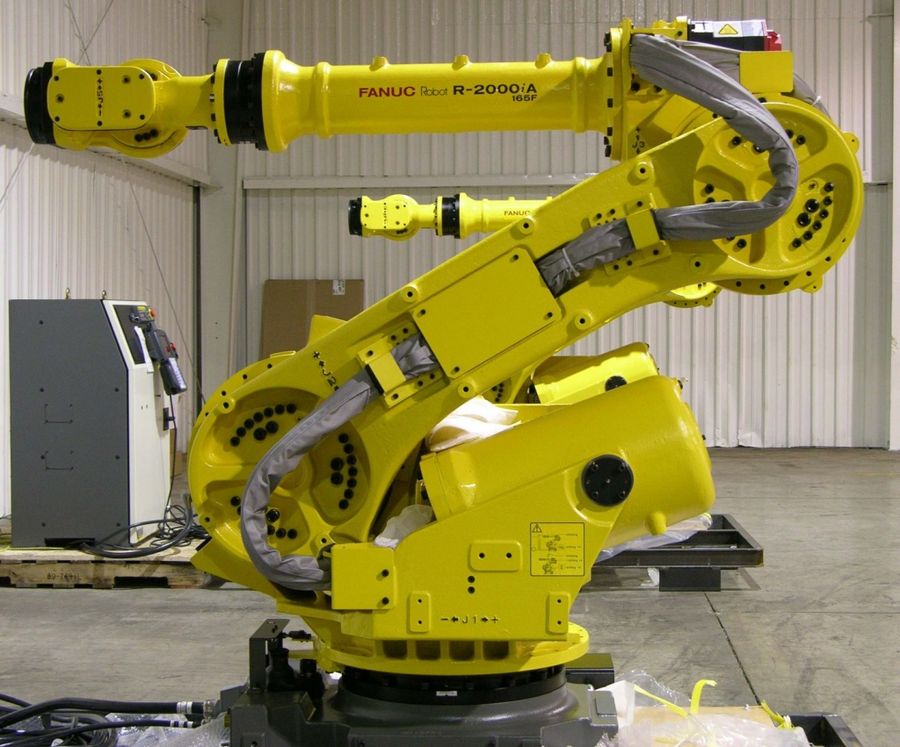 Рассматривая велосипед в качестве примера. Цепь, которая соединяет переднюю звезду с задним колесом, является трансмиссией. Так велосипеды и передвигаются, начиная с вращения педалей и передавая вращательную энергию на заднее колесо с помощью трансмиссии.
Рассматривая велосипед в качестве примера. Цепь, которая соединяет переднюю звезду с задним колесом, является трансмиссией. Так велосипеды и передвигаются, начиная с вращения педалей и передавая вращательную энергию на заднее колесо с помощью трансмиссии.
Этот принцип также применяется внутри промышленного робота. Двигатель, используемый в роботах, обычно размещается рядом с суставами, но его также можно разместить вдали от суставов, используя трансмиссионные механизмы, такие как ремни и шестерни. Такая схема применяется в запястье роботов серии R от Kawasaki, что позволило сделать запястье более компактным.
4. Инструмент робота (EOAT)
В западной литераторе можно встретить термин End of arm tooling (EOAT), что дословно переводится как инструмент на конце руки.
Люди могут выполнять различные задачи, используя инструменты, роботы недалеко ушли. Касательно промышленных роботов, как правило они производятся без основного инструмента, который должен крепиться к концу запястья робота. Это может быть захват, сварочная горелка или покрасочный распылитель и многое другое оборудование. В соответствии с задачей и технологией производства инженер на стороне поставщика или на стороне будущего владельца, дополнительно комплектуют робота необходимым оборудованием.
Это может быть захват, сварочная горелка или покрасочный распылитель и многое другое оборудование. В соответствии с задачей и технологией производства инженер на стороне поставщика или на стороне будущего владельца, дополнительно комплектуют робота необходимым оборудованием.
Если нужна универсальность, то можно установить устройство смены инструмента, и робот сможет выполнять несколько задач в рамках одного комплекса. Подробнее с инструментами, роботами и их применениями в производстве вы сможете узнать на страницах нашего сайта.
В видео ниже в качестве инструмента используется нож для надрезов будущего багета
Мы подробно рассмотрели самые важные составляющие промышленного робота, но кто управляет всем этим?
5. Мозг промышленного робота — контроллер
По определению робот это автономное устройство, способное выполнять операции в автоматическом режиме. Поэтому нужно чтобы кто-то или что-то управляло всеми компонентами робота. Этим управляющим устройством является контроллер промышленного робота.
Этим управляющим устройством является контроллер промышленного робота.
К контроллеру подключается пульт обучения робота, с помощью которого можно запрограммировать траектории его движения и создать управляющую программу по выполнению определенной последовательности действий роботом. К контроллеру промышленного робота можно подключить датчики, инструменты или других роботов и синхронизировать их действия между собой или их взаимодействие с другим оборудованием или оператором.
6. Заключение
В этой статье мы рассмотрели базовую структуру промышленных роботов. Теперь вы имеете представления какие компоненты составляют основу робота и где они расположены. Многие могут подумать, что нет необходимости знать как робот устроен, при рассмотрении вопроса внедрения роботов на свое производство. Тем не менее, эти общие знания помогут определить какой именно робот вам нужен, с каким потенциалом движений, точностью, количеством осей и каким инструментом оснастить для решения ваших производственных задач.
В нашем каталоге вы найдете подробные спецификации по роботам, а также информацию по их возможностям.
Чтобы выполнить вашу производственную задачу наиболее эффективным способом потребуется наиболее подходящий робот. Наши сотрудники всегда рады будут помочь в подборе робота и инструмента для него.
Навигация по статье:
- Роботы и человек. Так ли они отличаются?
- Сравнение робота и человека
- Что нужно для движений робота? Структура робота
- Звенья
- Редукторы
- Моторы
- Энкодер
- Трансмиссия, ременная передача
- Инструмент робота (EOAT)
- Мозг промышленного робота — контроллер
- Заключение
10 компаний-лидеров индустрии промышленных роботов
Если вы ищете нового робота или просто знакомитесь с отраслью, вы, вероятно, захотите узнать… какие компании-производители промышленных роботов наиболее популярны? Многие великие компании, занимающиеся промышленными роботами, заслуживают вашего внимания. Но некоторые компании лидируют в отрасли на протяжении десятилетий.
Но некоторые компании лидируют в отрасли на протяжении десятилетий.
Некоторые люди чувствуют себя более комфортно, выбирая ведущую в отрасли марку.
Они считают, что чем больше людей будут использовать бренд роботов, тем лучше будут роботы. Определенно есть логика в выборе бренда, который пользуется популярностью на протяжении десятилетий.
В настоящее время существуют сотни производителей промышленных роботов, которые предлагают надежных, многофункциональных и производительных роботов. Стоит посмотреть на весь рынок, поскольку каждый производитель преуспевает в разных областях.
Но некоторые роботизированные компании определенно лидируют в отрасли.
RoboDK поддерживает роботов всех этих производителей.
Что делает бренд промышленных роботов ведущим в отрасли?
Перечисленные ниже марки роботов мы бы назвали «ведущими в отрасли».
Что это означает на практике?
Действительно, компания, производящая промышленных роботов, может выделиться по нескольким причинам, в том числе:
- У нее высокий годовой доход или другие показатели высокого финансового успеха
- Десятилетиями он был приверженцем индустрии робототехники
- Его роботы повсеместно используются в некоторых отраслях или для некоторых приложений
- Он стал пионером изменений в отрасли
Эти маркеры не рассказывают всей истории, но они могут быть полезны для получения общего представления о «ключевых игроках» на рынке робототехники.
Четыре крупнейшие компании по производству промышленных роботов
На протяжении многих лет индустрию робототехники возглавлял ряд компаний, которые часто называют «Большой четверкой».
Фактически, роботов этих компаний можно найти на тысячах объектов по всему миру, и вместе они контролируют примерно 75% рынка робототехники. Поэтому их часто сразу узнают благодаря отличному брендингу и дизайну продукта каждой компании.
1. ABB
Обычно робота ABB можно узнать по его белому цвету с характерным красным логотипом.
АББ была основана в 1988 году и базируется в Цюрихе, Швейцария. Помимо робототехники, она специализируется на других технологиях автоматизации и энергетическом оборудовании.
Годовой доход компании составляет около 28 миллиардов долларов, и в 2002 году она стала первой компанией в мире, продавшей 100 000 роботов.
2. Fanuc
Обычно робота Fanuc можно узнать по его ярко-желтому цвету.
Fanuc была основана в 1972 году и базируется в Ошино, Япония, со штаб-квартирой у подножия легендарной горы Фудзи. Компания специализируется на робототехнике и другом оборудовании для автоматизации, в частности на станках с ЧПУ.
Компания специализируется на робототехнике и другом оборудовании для автоматизации, в частности на станках с ЧПУ.
Годовой доход компании составляет 4,7 миллиарда долларов, и она установила более 750 000 роботов по всему миру.
3. KUKA
Обычно робота KUKA можно узнать по характерному оранжевому цвету.
KUKA была основана в 1898 году, когда она начинала как производитель газообразного ацетилена. Компания впервые занялась промышленной автоматизацией в 1956 году, создав систему автоматической сварки, и создала свой первый сварочный робот в 1971 году.9 миллионов в робототехнике.
4. Yaskawa
Ассортимент роботов Motoman производится компанией Yaskawa, которых обычно можно узнать по бело-синей окраске.
Yaskawa была основана в 1915 году, но их первый робот был выпущен в 1974 году. Это был первый промышленный робот с электрическим приводом в Японии, так как до этого все роботы приводились в движение гидравлически.
Компания базируется в Фукуоке, Япония, и имеет годовой доход около 1,7 миллиарда долларов, из которых около 59 долларов. 7 миллионов в робототехнике.
7 миллионов в робототехнике.
6 Другие популярные компании в области промышленной робототехники
Хотя упомянутая выше «большая четверка» занимает огромное место на рынке робототехники, можно сказать, что эти другие компании в области промышленной робототехники также по-своему лидируют в отрасли.
Роботов этих компаний можно найти на многих объектах по всему миру. Как и все существующие компании в области робототехники, все они базируются в Японии или Европе.
5. Comau
Comau — производитель средств автоматизации и робототехники, базирующийся в Турине, Италия.
Компания была основана в 1973 году и разработала первый лазерный робот для General Motors в 1980-х годах. Совсем недавно компания перешла на совместную робототехнику, и ее кобот Aura имеет самую большую грузоподъемность на рынке (170 кг).
Годовой доход компании составляет 1,2 миллиарда долларов.
6. Epson
Когда вы думаете об Epson, вы можете сначала подумать об их настольных принтерах. Тем не менее, подразделение робототехники Epson является крупным игроком в отрасли.
Тем не менее, подразделение робототехники Epson является крупным игроком в отрасли.
Компания Epson была основана в 1942 и базируется в Нагано, Япония. Компания впервые вывела своих роботов на рынки Северной и Южной Америки в 1984 году.
Годовой доход компании в целом составляет 9,6 миллиарда долларов, из которых около 1,32 миллиарда долларов приходится на носимые и промышленные товары.
7. Kawasaki
Kawasaki — японский промышленный производитель, наиболее известный своими мотоциклами, двигателями и аэрокосмическим оборудованием.
Компания была основана в 1896 году, но начала производить роботов в 1968 году, когда заключила соглашение с Unimation (первой в мире компанией по производству промышленных роботов) о локальном производстве роботов.
Компания имеет годовой доход в 1,3 миллиарда долларов и установила более 160 000 роботов по всему миру.
8. Mitsubishi
Роботы Mitsubishi Electric, наиболее известные своей электротехнической продукцией, также широко используются в отрасли.
Mitsubishi Electric (сама часть Mitsubishi) была основана в 1921 году и базируется в Токио, Япония.
Годовой доход компании составляет около 11,6 миллиардов долларов, из которых около 3 миллиардов долларов приходится на системы промышленной автоматизации.
9. Stäubli
Роботы Stäubli — еще одна опора индустрии робототехники, их можно найти на многих объектах по всему миру.
Компания была основана в 1892 году и базируется в Хоргене, Швейцария. Начав с производства средств автоматизации ткацкого производства, в 1982 году, когда она приобрела Unimation, она занялась робототехникой.
Годовой оборот компании составляет около 1,2 миллиарда долларов.
10. Универсальные роботы и рынок коботов
Наконец, самая новая компания в этом списке была в авангарде одной из последних тенденций в робототехнике — коллаборативных роботов (также известных как коботы).
Компания Universal Robots была основана в 2005 году и базируется в Оденсе, Дания. Вероятно, компания ввела термин «коллаборативный робот» для обозначения робота, который может работать без защитного ограждения. Годовой доход компании составляет 219 миллионов долларов.
Вероятно, компания ввела термин «коллаборативный робот» для обозначения робота, который может работать без защитного ограждения. Годовой доход компании составляет 219 миллионов долларов.
Omron и рост числа коботов
С тех пор были основаны десятки других компаний, производящих совместные роботы, и более крупные игроки на рынке также выпустили своих собственных коботов.
Одной из таких компаний, которая с большим успехом вышла на рынок совместной робототехники, является Omron.
Omron — компания по промышленной автоматизации, базирующаяся в Киото, Япония. Они стали партнерами Techman Robot в 2018 году, добавив ряд успешных совместных роботов к существующему широкому каталогу промышленных роботов, включая мобильных роботов, роботов SCARA и дельта-роботов. Годовой доход компании составляет 6,9 миллиарда долларов.
Какую марку промышленных роботов выбрать?
В целом, все эти производители промышленных роботов и многие другие могут стать хорошим выбором для вашего следующего робота.
Но как определить, какой робот правильный? Это может быть ошеломляюще, когда видишь так много разных роботов.
Для начала стоит решить, какие свойства потребуются вашему роботу. Какая грузоподъемность, например, и какая досягаемость потребуется для вашей задачи?
С этого момента вы можете продолжать свои исследования, лучше понимая, что вы ищете в роботе.
Наконец, какую бы марку роботов вы ни выбрали, вы можете быть уверены, что RoboDK поддерживает ее.
Промышленные роботы | Промышленные робототехнические системы
Промышленные роботы-манипуляторы
Наши ведущие в отрасли промышленные роботы Motoman включают в себя высокополезных, высокоскоростных, сверхманевренных семиосных и уникальных 15-осевых роботов с двумя руками. Благодаря передовым контроллерам, системам машинного зрения, периферийным устройствам и другим лучшим в своем классе компонентам мы можем сконфигурировать решение, адаптированное к вашим производственным потребностям.
Используйте приведенные ниже критерии, чтобы выбрать правильный манипулятор для вашего промышленного применения в соответствии с требуемой грузоподъемностью и радиусом действия. Каждая модель совместима с одной или несколькими моделями контроллеров роботов, что позволяет программировать и контролировать задачи одного робота или координировать работу нескольких роботов. Вы также можете просмотреть наш каталог роботов, чтобы увидеть бок о бок сравнения.
Фильтровать роботов по:
(Тип)Сборка и транспортировкаУпаковка и укладка на поддоны Покраска и дозирование Сварка и резка
(Применение)Дуговая сваркаСборкаЛитье под давлениемРаспределениеОбслуживание оборудованияСнятие материалаРезка/обрезка материалаОбработка материаловПокраскаУкладка на поддоныПередача деталейПодбор и упаковкаПодбор и размещениеПресс-техническое обслуживаниеОбработка образцовТочечная сваркаIP65-67
(Полезная нагрузка)<2 кг2-910-30 кг 31-100 кг>100 кг
(Макс. рабочий диапазон)<1000 мм1000-2000 мм2001-3000 мм>3000 мм
рабочий диапазон)<1000 мм1000-2000 мм2001-3000 мм>3000 мм
Сборка и обращение
Серия EP
ЭП4000Д
ЭФ230РЛД
ЭФ5000Д
Серия GP
ГП4
GP20HL
GP25-12
GP110B
GP165R
GP180-120
GP200R
GP200S
GP280L
GP400R
Серия АСД
SDA5F
SDA10D
SDA10F
SDA20D
SDA20F
Серия МН
MHJF
MH6F-10
Mh34-10
MH50 II-20
MH50 II-35
Mh350 II
Mh380 II
Серия SIA
SIA5D
SIA10D
SIA10F
SIA20D
SIA20F
SIA30D
SIA50D
Сварка и резка
Серия AR
АР700
AR1440
AR1440E
AR1730
AR2010
AR3120
Серия SP
СП80
SP100B
SP110H
SP150R
SP165-105
SP180H
SP180H-110
SP185R
SP225H
9000H 9000 9000H 9000H 9000H 9000H 9000 9000 9000H.
