Что такое противо-ЭДС в электродвигателях постоянного тока. Как возникает противо-ЭДС. Как противо-ЭДС влияет на работу двигателя. Каковы способы компенсации противо-ЭДС. Почему понимание противо-ЭДС важно для эффективной работы электроприводов.
Что такое противо-ЭДС в электродвигателях постоянного тока
Противо-ЭДС (электродвижущая сила) — это напряжение, возникающее в обмотках якоря электродвигателя постоянного тока при его вращении в магнитном поле. Направление противо-ЭДС противоположно приложенному к двигателю напряжению.
Механизм возникновения противо-ЭДС
Противо-ЭДС возникает в результате действия закона электромагнитной индукции Фарадея. При вращении проводников обмотки якоря в магнитном поле статора в них наводится ЭДС. Суммарная ЭДС всех проводников обмотки якоря и создает противо-ЭДС двигателя.
Основные факторы, влияющие на величину противо-ЭДС:
- Скорость вращения якоря
- Магнитный поток возбуждения
- Число активных проводников обмотки якоря
- Конструктивные особенности двигателя
Влияние противо-ЭДС на характеристики двигателя
- Ограничивает ток якоря при пуске и работе двигателя
- Снижает потребляемую мощность при увеличении скорости вращения
- Обеспечивает саморегулирование скорости двигателя при изменении нагрузки
- Влияет на КПД и энергоэффективность двигателя
Математическое описание противо-ЭДС
Величина противо-ЭДС E в двигателе постоянного тока определяется выражением:
E = c * Φ * n
Где:
- c — конструктивная постоянная двигателя
- Φ — магнитный поток возбуждения
- n — частота вращения якоря
Способы компенсации противо-ЭДС
Для компенсации негативного влияния противо-ЭДС и улучшения характеристик двигателя применяются следующие методы:
- Повышение напряжения питания двигателя
- Использование систем управления с обратной связью по скорости
- Применение специальных схем коммутации обмоток
- Оптимизация конструкции магнитной системы двигателя
Роль противо-ЭДС в регулировании скорости
Противо-ЭДС играет ключевую роль в регулировании скорости двигателя постоянного тока. При увеличении нагрузки на валу скорость двигателя снижается, что приводит к уменьшению противо-ЭДС. Это вызывает увеличение тока якоря и, как следствие, вращающего момента, компенсирующего возросшую нагрузку.
Влияние противо-ЭДС на пусковые характеристики
В момент пуска двигателя, когда ротор неподвижен, противо-ЭДС равна нулю. Это приводит к резкому увеличению пускового тока, который может в 5-7 раз превышать номинальное значение. По мере разгона двигателя противо-ЭДС возрастает, ограничивая ток якоря.
Противо-ЭДС в генераторном режиме
При работе машины постоянного тока в генераторном режиме противо-ЭДС становится основным источником напряжения. В этом случае она уже не противодействует, а наоборот, создает напряжение на выходе генератора.
Измерение противо-ЭДС
Для измерения противо-ЭДС двигателя постоянного тока используются следующие методы:
- Метод холостого хода
- Метод вольтметра-амперметра
- Осциллографический метод
- Компенсационный метод
Противо-ЭДС в бесколлекторных двигателях постоянного тока
В бесколлекторных двигателях постоянного тока (BLDC) противо-ЭДС также играет важную роль. Она используется для определения положения ротора и коммутации обмоток статора в бессенсорных системах управления.
Влияние противо-ЭДС на энергоэффективность
Противо-ЭДС влияет на энергоэффективность двигателя постоянного тока. С одной стороны, она ограничивает потребляемую мощность при высоких скоростях. С другой стороны, для ее преодоления требуется дополнительное напряжение питания, что может снижать общий КПД системы.
Методы снижения влияния противо-ЭДС
Для снижения негативного влияния противо-ЭДС на характеристики двигателя применяются следующие методы:
- Использование многосекционных обмоток якоря
- Применение компенсационных обмоток
- Оптимизация геометрии магнитной системы
- Использование современных магнитных материалов
Противо-ЭДС в системах рекуперативного торможения
В системах рекуперативного торможения электромобилей и электропоездов противо-ЭДС используется для генерации электроэнергии при замедлении. Это позволяет повысить общую энергоэффективность транспортного средства.
Противоэдс в электродвигателе
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока. Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению.
Поиск данных по Вашему запросу:
Противоэдс в электродвигателе
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Электрические машины без противо-эдс
- Система регулирования тока в нагрузке с противоэдс
- RU2211526C2 — Электропривод постоянного тока с обратной связью по эдс — Google Patents
- Электродвижущая сила и сопротивление
- Магнитно-электрические двигатели «Л-мотор СЭМЭН».
Электродвигатель без противоэдс
- Превращаем стандартный мотор постоянного тока в мотор без противоЭДС.
- Очередной вечный двигатель. Посмотрите и оцените
- Регулировка оборотов электродвигателей
- www.skif.biz
- Из личной почты. Электродвигатели без противо ЭДС
 Электродвигатель без противоэдс
Электродвигатель без противоэдсПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Использование противо ЭДС в электро двигателе — Сергей Качан и Михаил — Глобальная Волна
Электрические машины без противо-эдс
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами электродвигателей , которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных , бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных , бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов.
Очень широкое распространение электродвигатели нашли на современном транспорте. Еще более впечатляющее будущее уготовано электродвигателям в электромобилях и роботах. С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления.
На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую. Впервые созданный в году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель.
Электромагнетизм в основе работы электродвигателя. При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Сила F , действующая на проводник в магнитном поле, равна произведению силы тока I в проводнике на вектор магнитной индукции поля B и длину проводника L. Перемещение проводника с током в магнитном поле Сила Лоренца. Коллекторные двигатели постоянного тока Brushed DC или BDC, по терминологии TI сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Принцип действия коллекторного электродвигателя BDC.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике. К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя. Коммутация тока здесь выполняется электронным способом. Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем. Принцип действия бесколлекторного электродвигателя BLDC. Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора SensorLess.
Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем. Принцип действия бесколлекторного электродвигателя BLDC. Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора SensorLess.
Коммутация тока обмоток статора выполняется с помощью электронных ключей вентилей. Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.
Чередование фаз при вращении BLDC. Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов. В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением.
Повышенное разрешение обеспечивают вращающиеся трансформаторы резольверы. Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. Датчики положения ротора электродвигателей. Шаговые двигатели ШД получили достаточно широкое распространение в системах автоматики и управления.
Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках. В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме.
Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи.
Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи.
Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования величина шага зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов. В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером.
Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием.
Последовательность сигналов управления биполярным ШД. Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. Полношаговый режим управления ШД. Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек. Полушаговый режим управления ШД. Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага.
Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.
Управление ШД в режиме микрошага. Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов FET.
В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов FET.
FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер Pre-Driver имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя.
Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима. Блок-схемы систем управления двигателем. Смена направления вращения коллекторного двигателя.
Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ.
Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ.
Режимы вращения, быстрого и медленного торможенияс. Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ.
После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя пульсации крутящего момента, шум, мощность и так далее.
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока.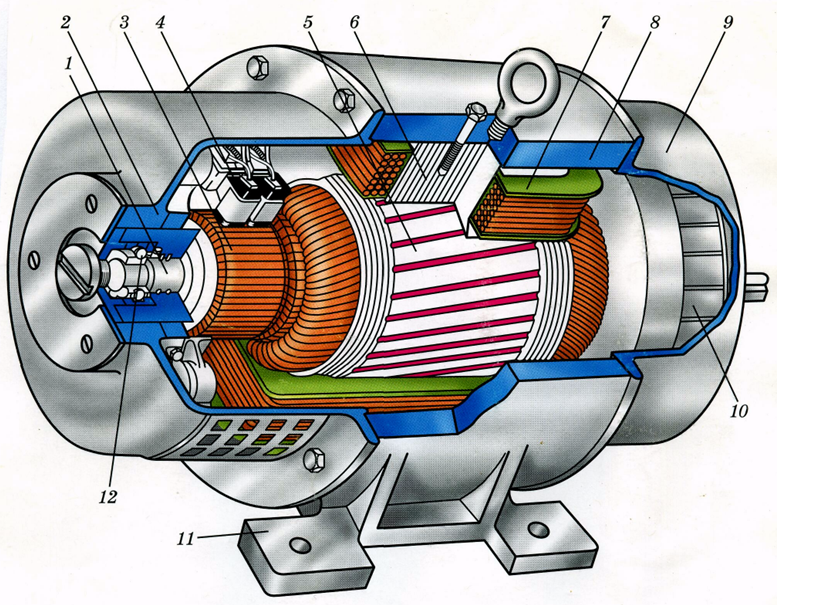 Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера MCU , обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера MCU , обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления.
Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры. Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров.
Есть отдельные драйверы, предназначенные для использования с двигателями разных типов. Всего в модельном ряду компании более 35 драйверов для ШД. Драйверы TI для управления шаговыми двигателями. TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Блок-схема драйвера DRV Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока режимы Slow, Fast, Mixed Decay.
Система расчета микрошага может быть следующих типов:.
Система регулирования тока в нагрузке с противоэдс
Калининградская энергосистема готовится к первому в своей истории опыту реальной изолированной работы, который с большой вероятностью случится уже в году. Энергетические системы, Энергетическая зависимость. Энергетические системы, Напряжение, Генератор, Ротор. Российские предприятия в среднесрочной перспективе могут встретиться с новыми рисками, иллюстрирующими универсальность знакомой всем поговорки о благих намерениях и их печальных результатах. Электрические сети, Электроэнергия, Мощность. Ежегодно во всем мире энергетики подсчитывают потери, которые наносят электросетям представители животного мира — счет идет на миллиарды.
Устройство пуска и реверса бесконтактных электродвигателей выделенных противоЭДС при эксплуатации электродвигателей с.
RU2211526C2 — Электропривод постоянного тока с обратной связью по эдс — Google Patents
Регистрация Вход. Ответы Mail. Вопросы — лидеры Задача по физике 1 ставка. Провод КСПВ, вопрос к электрикам 1 ставка. Мощность рассеивания транзистора? Зачем электродрели нужен редуктор, точнее большая шестеренка? Лидеры категории Антон Владимирович Искусственный Интеллект. Кислый Высший разум.
Электродвижущая сила и сопротивление
Тема в разделе » Общие принципы устройств альтернативной техники «, создана пользователем AAbramovich , 6 Декабрь Войти или зарегистрироваться. Форум по свободной и альтернативной энергии, генераторам энергии и автономному энергоснабжению. Друзья, «лихорадка» вокруг тем об альтернативной энергии заставила возбудиться и мошенников!
Изменение направления вращения двигателей постоянного тока производится путем изменения направления тока в обмотке якоря, если остается прежним направление тока в обмотке возбуждения, или путем изменения направления тока в обмотке возбуждения, если остается прежним направление тока в обмотке якоря. Если же изменить одновременно направление тока в обмотке якоря и в обмотке возбуждения, то направление вращения двигателя не изменится.
Если же изменить одновременно направление тока в обмотке якоря и в обмотке возбуждения, то направление вращения двигателя не изменится.
Магнитно-электрические двигатели «Л-мотор СЭМЭН». Электродвигатель без противоэдс
Узнайте, как закон индукции Фарадея определяет сопротивление электродвижущей силе: вихревые токи, магнитное демпфирование, токовая петля в проводнике. Их можно объяснить через закон индукции Фарадея. Двигатели и генераторы сходятся во многих характеристиках. Первые трансформируют механическую энергию в электрическую, а вторые повторяют процесс в обратном направлении. Также они похожи по конструкции. При повороте катушки двигателя меняется магнитный поток и формируется ЭДС.
Превращаем стандартный мотор постоянного тока в мотор без противоЭДС.
Человечество всегда искало источники энергии, которые удовлетворяли бы его насущные нужды. С давних пор и до нашего времени основными источниками энергии служат различные органические виды топлива и в очень малой степени энергия движущейся воды, ветра и атомная, которая очень опасна. Сейчас топлива сжигается столько, что мир стоит перед лицом глобальной катастрофы. Есть ли выход из этого тупика? Ведь потребность в энергии в мире постоянно растет, а запасов топлива на Земле становится все меньше и меньше. Если мы посмотрим на сто с лишним лет назад, то увидим, что в конце го века в нескольких странах были созданы и использовались установки, производящие энергии больше, чем они сами потребляли для ее производства. Но мировому капиталу было невыгодно иметь такие установки, и они были разрушены, авторы умерли в нищете, и начался победный марш топливно-энергетической отрасли. Что мы имеем на сегодня?
Сейчас топлива сжигается столько, что мир стоит перед лицом глобальной катастрофы. Есть ли выход из этого тупика? Ведь потребность в энергии в мире постоянно растет, а запасов топлива на Земле становится все меньше и меньше. Если мы посмотрим на сто с лишним лет назад, то увидим, что в конце го века в нескольких странах были созданы и использовались установки, производящие энергии больше, чем они сами потребляли для ее производства. Но мировому капиталу было невыгодно иметь такие установки, и они были разрушены, авторы умерли в нищете, и начался победный марш топливно-энергетической отрасли. Что мы имеем на сегодня?
Иными словами, двигатель часть поведенной мощности тратит впустую! Предлагаем готовую рабочую модель электродвигателя без противоЭДС.
Очередной вечный двигатель. Посмотрите и оцените
Противоэдс в электродвигателе
Агеев Владимир Егорович. Изобретение относится к электротехнике и может быть использовано в электрических машинах с бесконтактной коммутацией якорной обмотки.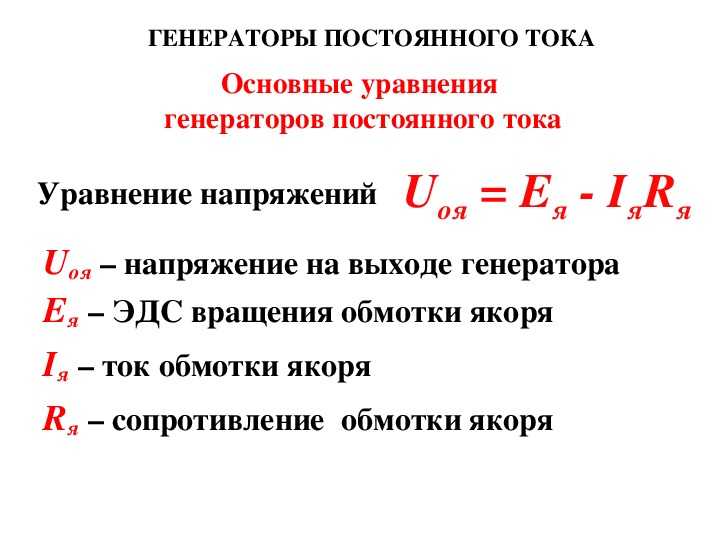 Известна схема устройства [1] автоматического управления пуском бесконтактных электродвигателей, которая имеет основную обмотку и вспомогательную с фазосдвигающим конденсатором и симистором, подключающим источник питания при пуске и периодически отключающим при синхронной работе.
Известна схема устройства [1] автоматического управления пуском бесконтактных электродвигателей, которая имеет основную обмотку и вспомогательную с фазосдвигающим конденсатором и симистором, подключающим источник питания при пуске и периодически отключающим при синхронной работе.
Регулировка оборотов электродвигателей
ВИДЕО ПО ТЕМЕ: Электродвигатель постоянного тока
Вот уже более лет человечество использует электрические машины. При этом всё ещё данные машины не вытеснили ДВС. Причина проста — действующая в электромашинах сила протвоЭДС не даёт им возможности реализовать все преимущества экологически чистого движителя, сильно снижая КПД мотора. Иными словами, двигатель часть поведенной мощности тратит впустую! Предлагаем готовую рабочую модель электродвигателя без противоЭДС. Рабочая модель основана на инновационном принципе, отличном от общеизвестного принципа рамки Фарадея.
Рисунок взят из Интернета. Но часть 2 на этом рисунке пришлось немного исправить — изменить расположение щеток и оставить «признак» протекания тока только в 4-х проводниках, ибо ток идет только через те проводники на роторе, которые в данный момент контактируют через пластину коллектора с щетками.
www.skif.biz
Switch to English регистрация. Телефон или email. Чужой компьютер. Ярослав Старухин. Ярослав Старухин запись закреплена 24 апр YouTube
Из личной почты. Электродвигатели без противо ЭДС
Правильный ремонт и перемотка электродвигателя экономит электроэнергию. Резонансный электродвигатель без противо ЭДС применяют для снижения потребляемой мощности от электросети. Он потребляет из сети совсем небольшую электрическую мощность, которая в раз меньше мощности, потребляемой обычным стандартным электрическим двигателем. Резонансный электрический двигатель и его схему подключения для радикального снижения потребляемой электрической мощности из сети можно описать в двух словах:.
Электродвигатель постоянного тока
- Постоянная момента
- Постоянная ЭДС
- Постоянная электродвигателя
- Жесткость механической характеристики
- Напряжение электродвигателя
- Мощность электродвигателя постоянного тока
- Механическая постоянная времени
Постоянная момента
,
- где M — момент электродвигателя, Нм,
- – постоянная момента, Н∙м/А,
- I — сила тока, А
Постоянная ЭДС
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения: [1]
Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения: [1]
,
- где — электродвижущая сила, В,
- – постоянная ЭДС, В∙с/рад,
- — угловая частота, рад/с
Постоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц.
Постоянная электродвигателя
Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
,
- где — постоянная электродвигателя, Нм/√Вт,
- R — сопротивление обмоток, Ом,
- – максимальный момент, Нм,
- — мощность потребляемая при максимальном моменте, Вт
Справка: Постоянная электродвигателя вместе с размерами электродвигателя являются основными параметрами для инженера при выборе электродвигателя с лучшим соотношением мощность / объем.
Постоянная электродвигателя не зависит от соединения обмоток, при условии, что используется один и тот же материал проводника. Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят постоянную ЭДС, при этом постоянная электродвигателя останется не изменой.
Жесткость механической характеристики двигателя
,
- где — жесткость механической характеристики электродвигателя постоянного тока
Напряжение электродвигателя
Уравнение баланса напряжений на зажимах двигателя постоянного тока имеет вид (в случае коллекторного двигателя не учитывается падение напряжения в щеточно-коллекторном узле):
,
- где U — напряжение, В.
Уравнение напряжения выраженное через момент двигателя будет выглядеть следующим образом:
Соотношение между моментом и частотой вращения при двух различных напряжениях питания двигателя постоянного тока неизменно. При увеличении частоты вращения момент линейно уменьшается. Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя.
Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя.
Благодаря таким характеристикам упрощается управление частотой вращения и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях [1].
Мощность электродвигателя постоянного тока
Упрощенная модель электродвигателя выглядит следующим образом:
- где I – сила тока, А
- U — напряжение, В,
- M — момент электродвигателя, Н∙м
- R — сопротивление токопроводящих элементов, Ом,
- L — индуктивность, Гн,
- Pэл — электрическая мощность (подведенная), Вт
- Pмех — механическая мощность (полезная), Вт
- Pтеп — тепловые потери, Вт
- Pинд — мощность затрачиваемая на заряд катушки индуктивности, Вт
- Pтр — потери на трение, Вт
Механическая постоянная времени
Механическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое частота вращения ненагруженного электродвигателя достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
- где — механическая постоянная времени, с
Смотрите также
Основные параметры электродвигателя
Общие параметры для всех электродвигателей
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- Т.Кенио, С.Нагамори. Двигатели постоянного тока с постоянными магнитами: Пер. с англ.-М.: Энергоатомиздат, 1989.
Библиографический список
противо эдс двигателя постоянного тока | Маркет
Электротехнический интернет-портал
- # 14961101584
- Вчера в 08:14
- 156
- Прайс-лист
Поделиться
Пожаловаться
Цена по запросу
Описание товара
Здравствуйте! Вы попали на доску объявлений. Сотрудники Promelectrica.com разместили тут товары, которые Вам могут быть интересны. Информация о наличии по телефону (495)640-04-53
Сотрудники Promelectrica.com разместили тут товары, которые Вам могут быть интересны. Информация о наличии по телефону (495)640-04-53
Коллекторный электродвигатель постоянного тока с электромагнитным возбуждением Д-16Б предназначен для привода специального механизма, а также может быть использован в различных областях техники. Структура условного обозначения Д-16Б: Д — двигатель; 16 — порядковый номер разработки; Б — модификация исполнения двигателя. Условия эксплуатации Температура окружающего воздуха при эксплуатации от минус 60 до 50°С. Пониженное атмосферное давление однократно в течение 5 мин при номинальном вращающем моменте — не ниже 667 Па (5 мм рт.ст). Верхнее значение относительной влажности воздуха в течение 48ч — 98% при температуре (35±5)°С. Электродвигатель стоек к воздействию: Вибрационных нагрузок с диапазоном частот от 5 до 35 Гц и амплитудой не более 1 мм в течение 3 мин. Вибрационных нагрузок с диапазоном частот от 35 до 2000 Гц и ускорением от 39,2 до 147,2 мс-2 (от 4 до 15 g) в течение 23 мин.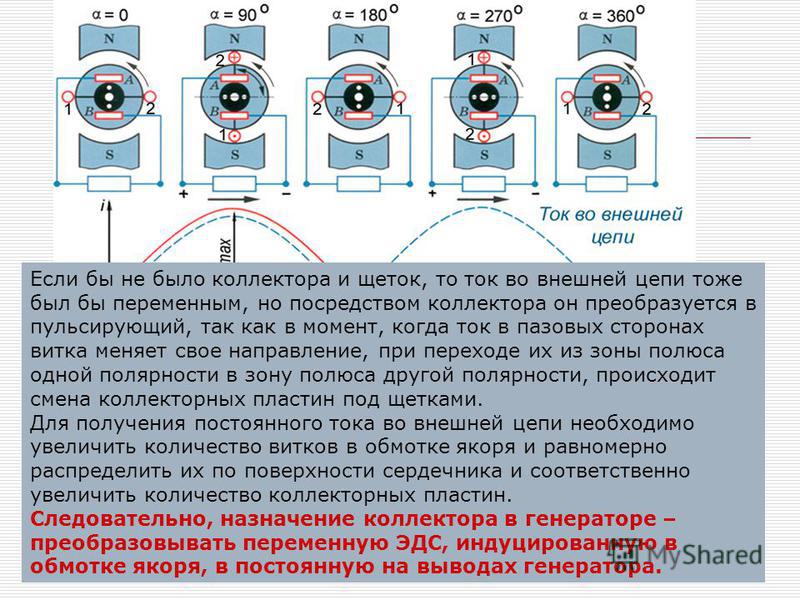 Линейных (центробежных) нагрузок с ускорением 98,1 мс-2 (10 g) в течение 5 мин. Механические нагрузки воздействуют на места крепления двигателя в любом направлении. Двигатель выдерживает воздействие: Вибрационных нагрузок с частотой вибрации от 10 до 2000 Гц и ускорением, действующим вдоль и перпендикулярно оси двигателя, от 20 до 40 мс-2 (от 2 до 4 g) в течение 46 ч в обесточенном состоянии и 2,8 ч при электрической нагрузке. Ударных многократных нагрузок с ускорением 50 мс-2 (5 g) при количестве ударов 5000 с частотой от 40 до 100 ударов в час и длительностью удара от 5 до 10 мс. Номинальный режим работы двигателя кратковременный при напряжении питания 27 В: 15 мин при вращающем моменте 1,47 Нм. 5 мин при вращающем моменте 1,76 Нм. 1 с при вращающем моменте 3,43 Нм. Конструктивное исполнение по способу монтажа в соответствии с ГОСТ 2479-79 IМ3081. Направление вращения вала левое со стороны выхода вала. Сопротивление изоляции электрических цепей относительно корпуса двигателя в нормальных климатических условиях при практически холодном состоянии двигателя до ввода в эксплуатацию — не менее 20 МОм.
Линейных (центробежных) нагрузок с ускорением 98,1 мс-2 (10 g) в течение 5 мин. Механические нагрузки воздействуют на места крепления двигателя в любом направлении. Двигатель выдерживает воздействие: Вибрационных нагрузок с частотой вибрации от 10 до 2000 Гц и ускорением, действующим вдоль и перпендикулярно оси двигателя, от 20 до 40 мс-2 (от 2 до 4 g) в течение 46 ч в обесточенном состоянии и 2,8 ч при электрической нагрузке. Ударных многократных нагрузок с ускорением 50 мс-2 (5 g) при количестве ударов 5000 с частотой от 40 до 100 ударов в час и длительностью удара от 5 до 10 мс. Номинальный режим работы двигателя кратковременный при напряжении питания 27 В: 15 мин при вращающем моменте 1,47 Нм. 5 мин при вращающем моменте 1,76 Нм. 1 с при вращающем моменте 3,43 Нм. Конструктивное исполнение по способу монтажа в соответствии с ГОСТ 2479-79 IМ3081. Направление вращения вала левое со стороны выхода вала. Сопротивление изоляции электрических цепей относительно корпуса двигателя в нормальных климатических условиях при практически холодном состоянии двигателя до ввода в эксплуатацию — не менее 20 МОм. В течение срока службы и минимальной наработки сопротивление изоляции при практически холодном состоянии двигателя — не менее 1 МОм. Изоляция электрических цепей относительно корпуса двигателя в нормальных климатических условиях выдерживает без пробоя и перекрытия воздействие испытательного напряжения 500 В (действующее значение) переменного тока частотой 50 Гц. Степень искрения на коллекторе двигателя при номинальном вращающем моменте и номинальном напряжении питания в нормальных климатических условиях не превышает 2 по ГОСТ 183-74. Двигатель соответствует требованиям технических условий ОДС.515.151 и комплекта конструкторской документации согласно 1ДС.599.112 СД. Условия транспортирования двигателя в упаковке предприятия-изготовителя в части воздействия механических факторов соответствуют условиям Л по ГОСТ 23216-78; в части воздействия климатических факторов внешней среды — таким же, как условия хранения 5 по ГОСТ 15150 — 69. Условия хранения двигателя соответствуют условиям I (отапливаемое хранилище), условиям 3 (неотапливаемое хранилище) и условиям 5 (навесы в макроклиматических районах с умеренным и холодным климатом) по ГОСТ 15150-69.
В течение срока службы и минимальной наработки сопротивление изоляции при практически холодном состоянии двигателя — не менее 1 МОм. Изоляция электрических цепей относительно корпуса двигателя в нормальных климатических условиях выдерживает без пробоя и перекрытия воздействие испытательного напряжения 500 В (действующее значение) переменного тока частотой 50 Гц. Степень искрения на коллекторе двигателя при номинальном вращающем моменте и номинальном напряжении питания в нормальных климатических условиях не превышает 2 по ГОСТ 183-74. Двигатель соответствует требованиям технических условий ОДС.515.151 и комплекта конструкторской документации согласно 1ДС.599.112 СД. Условия транспортирования двигателя в упаковке предприятия-изготовителя в части воздействия механических факторов соответствуют условиям Л по ГОСТ 23216-78; в части воздействия климатических факторов внешней среды — таким же, как условия хранения 5 по ГОСТ 15150 — 69. Условия хранения двигателя соответствуют условиям I (отапливаемое хранилище), условиям 3 (неотапливаемое хранилище) и условиям 5 (навесы в макроклиматических районах с умеренным и холодным климатом) по ГОСТ 15150-69. Эксплуатацию двигателей следует проводить в соответствии с техническим описанием и инструкцией по эксплуатации 1ДС.599.112 ТО. В процессе хранения двигатель, вмонтированный в аппаратуру изделия, должен подвергаться проверке на функционирование не реже одного раза в год. При проверке на функционирование двигатель работает при напряжении питания 27 В на холостом ходу или при номинальном вращающем моменте в течение одной минуты. Изготовитель гарантирует качество двигателя при соблюдении режимов работы и условий эксплуатации. ОДС.515.151 Технические характеристики Номинальное напряжение питания, В — 27 Номинальный вращающий момент, Нм — 1,76 Номинальная частота вращения, мин-1 — 8000 Потребляемый ток при номинальном вращающем моменте, А, не более — 78 Потребляемый ток при холостом ходе, А, не более — 17 Частота вращения при холостом ходе, мин-1, не более — 10900 КПД, % — 70 Момент инерции якоря, кгм2 — 8,310-4 Масса двигателя, кг, не более — 7 Двигатель в течение 5 мин допускает работу при номинальном вращающем моменте и напряжении питания, лежащем в пределах от 22 до 30 В.
Эксплуатацию двигателей следует проводить в соответствии с техническим описанием и инструкцией по эксплуатации 1ДС.599.112 ТО. В процессе хранения двигатель, вмонтированный в аппаратуру изделия, должен подвергаться проверке на функционирование не реже одного раза в год. При проверке на функционирование двигатель работает при напряжении питания 27 В на холостом ходу или при номинальном вращающем моменте в течение одной минуты. Изготовитель гарантирует качество двигателя при соблюдении режимов работы и условий эксплуатации. ОДС.515.151 Технические характеристики Номинальное напряжение питания, В — 27 Номинальный вращающий момент, Нм — 1,76 Номинальная частота вращения, мин-1 — 8000 Потребляемый ток при номинальном вращающем моменте, А, не более — 78 Потребляемый ток при холостом ходе, А, не более — 17 Частота вращения при холостом ходе, мин-1, не более — 10900 КПД, % — 70 Момент инерции якоря, кгм2 — 8,310-4 Масса двигателя, кг, не более — 7 Двигатель в течение 5 мин допускает работу при номинальном вращающем моменте и напряжении питания, лежащем в пределах от 22 до 30 В. При этом в нормальных климатических условиях: частота вращения изменяется в пределах от 6100 до 9000 мин-1; потребляемый ток — не более 88 А. Двигатель в течение 5 мин работы в выше указанном режиме допускает в течение 30 с работу при вращающем моменте 3,43 Нм. Параметры двигателя при этом не оговариваются. Двигатель в течение 10 мин допускает работу при вращающем моменте 0,49 Нм, температуре 50°С и напряжении питания, лежащем в пределах от 22 до 30 В с последующей работой при пониженном атмосферном давлении; в течение 20 мин в нормальных климатических условиях с последующим охлаждением. Частота вращения после работы в указанном режиме с последующим охлаждением и при последующей работе в течение 5 мин при номинальном вращающем моменте и напряжении питания 27 В — не менее 7000 мин-1. Потребляемый ток в этих же условиях — не более 84 А. Напряжение трогания при нижнем значении температуры и вращающем моменте 1,47 Нм — не более 8 В. Напряжение трогания в нормальных климатических условиях при холостом ходе — не более 7 В.
При этом в нормальных климатических условиях: частота вращения изменяется в пределах от 6100 до 9000 мин-1; потребляемый ток — не более 88 А. Двигатель в течение 5 мин работы в выше указанном режиме допускает в течение 30 с работу при вращающем моменте 3,43 Нм. Параметры двигателя при этом не оговариваются. Двигатель в течение 10 мин допускает работу при вращающем моменте 0,49 Нм, температуре 50°С и напряжении питания, лежащем в пределах от 22 до 30 В с последующей работой при пониженном атмосферном давлении; в течение 20 мин в нормальных климатических условиях с последующим охлаждением. Частота вращения после работы в указанном режиме с последующим охлаждением и при последующей работе в течение 5 мин при номинальном вращающем моменте и напряжении питания 27 В — не менее 7000 мин-1. Потребляемый ток в этих же условиях — не более 84 А. Напряжение трогания при нижнем значении температуры и вращающем моменте 1,47 Нм — не более 8 В. Напряжение трогания в нормальных климатических условиях при холостом ходе — не более 7 В. Минимальная наработка двигателя при номинальном напряжении питания 60 ч, в том числе: 20 ч непрерывно при вращающем моменте 0,98 Нм; 40 ч в номинальном режиме, из них 6 ч при верхнем значении температуры и 6 ч при нижнем значении температуры. Перерыв между включениями двигателя до полного охлаждения. Минимальный срок службы двигателя — 10,5 лет. Минимальный срок сохраняемости двигателя в отапливаемом хранилище — 10,5 лет, в том числе: не более 1 года в упаковке предприятия-изготовителя; не более 10,5 лет вмонтированным в аппаратуру изделия. В пределах срока сохраняемости допускается хранение двигателя вмонтированным в аппаратуру защищенного изделия: не более 5 лет в неотапливаемом хранилище; не более 1 года под навесом. Гарантийная наработка в пределах гарантийного срока эксплуатации — 60 ч. Гарантийный срок эксплуатации — 10,5 лет. Гарантийный срок хранения — 10,5 лет.
Минимальная наработка двигателя при номинальном напряжении питания 60 ч, в том числе: 20 ч непрерывно при вращающем моменте 0,98 Нм; 40 ч в номинальном режиме, из них 6 ч при верхнем значении температуры и 6 ч при нижнем значении температуры. Перерыв между включениями двигателя до полного охлаждения. Минимальный срок службы двигателя — 10,5 лет. Минимальный срок сохраняемости двигателя в отапливаемом хранилище — 10,5 лет, в том числе: не более 1 года в упаковке предприятия-изготовителя; не более 10,5 лет вмонтированным в аппаратуру изделия. В пределах срока сохраняемости допускается хранение двигателя вмонтированным в аппаратуру защищенного изделия: не более 5 лет в неотапливаемом хранилище; не более 1 года под навесом. Гарантийная наработка в пределах гарантийного срока эксплуатации — 60 ч. Гарантийный срок эксплуатации — 10,5 лет. Гарантийный срок хранения — 10,5 лет.
Точную информацию о товарах, ценах и наличии вы можете получить по запросу через электронную почту. Выставленный счет-договор является единственным информационным обязательством, все другие сведения могут содержать неточности. Мы затрачиваем все возможные силы для улучшения сервиса и благодарны тысячам юридических и частных лиц, воспользовавшимся нашими услугами, и сотням постоянных клиентов, которые продолжают с нами работать.
Мы затрачиваем все возможные силы для улучшения сервиса и благодарны тысячам юридических и частных лиц, воспользовавшимся нашими услугами, и сотням постоянных клиентов, которые продолжают с нами работать.
Каталог:
- Выключатели, концевики, джойстики
- Бесконтактные датчики
- Реле, контакторы, автоматы
- Маячки, колонны, сирены
- Приводная техника
- Разъемы и кабели
- Трансформаторы, источники питания
- Энкодеры, муфты
- Автоматизация и измерение
- Тиристоры, диоды, предохранители
Видео «Как добраться»:
Информация о технических характеристиках, комплекте поставки, стране изготовления, внешнем виде и цвете товара носит справочный характер и основывается на последних доступных к моменту публикации сведениях от продавца.
Товарное предложение №14961101584 обновлено Вчера в 08:14.
Контакты продавца
Отправить сообщениеСообщите, что нашли информацию на сайте «Элек. ру»
ру»
Промэлектрика
Promelectrica.ru – комплексные поставки электрики и автоматики.
Страница поставщика
Похожие товарные предложения
эдс двигателя постоянного тока
Артикул: эдс двигателя постоянного тока
Поставщик: Промэлектрика
Цена по запросу
Под заказ
Обновлено: 28 сентября
ПНТ 0/300-ХА
Поставщик: МТД проект
Цена по запросу
Под заказ
Размещено: 29 сентября
ПНТ-х-х нормирующий преобразователь сигналов термопар
Бюшель Сергей
Цена по запросу
Под заказ
Обновлено: 23 января
ПНТ-a-Pro
Поставщик: МТД проект
Цена по запросу
Под заказ
Размещено: 29 сентября
ПНТ 0/200-ХА
Поставщик: МТД проект
Цена по запросу
Под заказ
Размещено: 29 сентября
На Элек. ру вы найдёте электрические исполнительные механизмы – противо эдс двигателя постоянного тока, а также другую электротехническую продукцию от поставщика Промэлектрика, ООО. Уточнить цены и наличие можно в прайс-листе электромоторы
ру вы найдёте электрические исполнительные механизмы – противо эдс двигателя постоянного тока, а также другую электротехническую продукцию от поставщика Промэлектрика, ООО. Уточнить цены и наличие можно в прайс-листе электромоторы
Задняя ЭДС | Физика
Цель обучения
К концу этого раздела вы сможете:
- Объяснить, что такое противо-ЭДС и как она индуцируется.
Было отмечено, что двигатели и генераторы очень похожи. Генераторы преобразуют механическую энергию в электрическую, а двигатели преобразуют электрическую энергию в механическую. Кроме того, двигатели и генераторы имеют одинаковую конструкцию. Когда катушка двигателя поворачивается, магнитный поток изменяется, и индуцируется ЭДС (в соответствии с законом индукции Фарадея). Таким образом, двигатель действует как генератор всякий раз, когда его катушка вращается. Это произойдет независимо от того, вращается ли вал с помощью внешнего источника, такого как ременная передача, или под действием самого двигателя. То есть, когда двигатель совершает работу и его вал вращается, возникает ЭДС. Закон Ленца говорит нам, что ЭДС противодействует любому изменению, так что входной ЭДС, питающей двигатель, будет противодействовать ЭДС, создаваемая самим двигателем, называемая 9.0011 противо-ЭДС двигателя. (См. рис. 1.)
То есть, когда двигатель совершает работу и его вал вращается, возникает ЭДС. Закон Ленца говорит нам, что ЭДС противодействует любому изменению, так что входной ЭДС, питающей двигатель, будет противодействовать ЭДС, создаваемая самим двигателем, называемая 9.0011 противо-ЭДС двигателя. (См. рис. 1.)
Рис. 1. Катушка двигателя постоянного тока представлена на этой схеме в виде резистора. Обратная ЭДС представлена как переменная ЭДС, противодействующая той, что приводит в движение двигатель. Обратная ЭДС равна нулю, когда двигатель не вращается, и увеличивается пропорционально угловой скорости двигателя.
Обратная ЭДС — это мощность генератора двигателя, поэтому она пропорциональна угловой скорости двигателя ω . Он равен нулю при первом включении двигателя, что означает, что катушка получает полное управляющее напряжение, а двигатель потребляет максимальный ток, когда он включен, но не вращается. По мере того, как двигатель вращается все быстрее и быстрее, обратная ЭДС растет, всегда противодействуя ЭДС возбуждения, и снижает напряжение на катушке и величину потребляемого ею тока. Этот эффект заметен в ряде ситуаций. При первом включении пылесоса, холодильника или стиральной машины свет в той же цепи ненадолго гаснет из-за IR Падение, возникающее в фидерных линиях из-за большого тока, потребляемого двигателем. Когда двигатель впервые включается, он потребляет больше тока, чем когда он работает на своей нормальной рабочей скорости. Когда на двигатель воздействует механическая нагрузка, например, электрическая инвалидная коляска, поднимающаяся в гору, двигатель замедляется, обратная ЭДС падает, протекает больший ток и можно выполнить больше работы. Если двигатель работает на слишком низкой скорости, больший ток может привести к его перегреву (через резистивную мощность в катушке, P = I 2 R ), возможно даже выжечь. С другой стороны, если на двигатель не действует механическая нагрузка, его угловая скорость будет увеличиваться на ω до тех пор, пока противо-ЭДС не станет почти равной движущей ЭДС. Тогда двигатель использует ровно столько энергии, сколько необходимо для преодоления трения.
Этот эффект заметен в ряде ситуаций. При первом включении пылесоса, холодильника или стиральной машины свет в той же цепи ненадолго гаснет из-за IR Падение, возникающее в фидерных линиях из-за большого тока, потребляемого двигателем. Когда двигатель впервые включается, он потребляет больше тока, чем когда он работает на своей нормальной рабочей скорости. Когда на двигатель воздействует механическая нагрузка, например, электрическая инвалидная коляска, поднимающаяся в гору, двигатель замедляется, обратная ЭДС падает, протекает больший ток и можно выполнить больше работы. Если двигатель работает на слишком низкой скорости, больший ток может привести к его перегреву (через резистивную мощность в катушке, P = I 2 R ), возможно даже выжечь. С другой стороны, если на двигатель не действует механическая нагрузка, его угловая скорость будет увеличиваться на ω до тех пор, пока противо-ЭДС не станет почти равной движущей ЭДС. Тогда двигатель использует ровно столько энергии, сколько необходимо для преодоления трения.
Рассмотрим, например, катушки двигателя, представленные на рисунке 1. Катушки имеют эквивалентное сопротивление 0,400 Ом и приводятся в действие ЭДС 48,0 В. Вскоре после включения они потребляют ток I = В/R = (48,0 В)/(0,400 Ом) = 120 А и, таким образом, рассеять P = I 2 R = 5,76 кВт энергии в виде теплопередачи. При нормальных условиях работы этого двигателя предположим, что противо-ЭДС равна 40,0 В. Тогда при рабочей скорости общее напряжение на катушках составляет 8,0 В (48,0 В минус противо-ЭДС 40,0 В), а потребляемый ток равен I = В/об = (8,0 В)/(0,400 Ом) = 20 А. Таким образом, при нормальной нагрузке рассеиваемая мощность составляет P = IV = (20 А)/(8,0 В) = 160 Вт. Последнее не создаст проблем для этого двигателя, в то время как первые 5,76 кВт сожгут катушки, если будут продолжаться.
Резюме раздела
- Любая вращающаяся катушка будет иметь ЭДС индукции — в двигателях это называется обратной ЭДС, поскольку она противодействует входной ЭДС двигателя.

Концептуальные вопросы
1. Предположим, вы обнаружили, что ременная передача, соединяющая мощный двигатель с кондиционером, сломана, и двигатель работает свободно. Стоит ли беспокоиться о том, что двигатель потребляет много энергии без всякой полезной цели? Объясните, почему да или почему нет.
Задачи и упражнения
1. Предположим, что двигатель, подключенный к источнику 120 В, при первом запуске потребляет 10,0 А. а) Каково его сопротивление? (b) Какой ток он потребляет при нормальной рабочей скорости, когда он развивает противо-ЭДС 100 В?
2. Двигатель, работающий от электричества 240 В, имеет противо-ЭДС 180 В при рабочей скорости и потребляет ток 12,0 А. а) Каково его сопротивление? б) Какой ток он потребляет при первом запуске?
3. Какова противо-ЭДС двигателя на 120 В, который потребляет 8,00 А при нормальной скорости и 20,0 А при первом запуске?
4. Двигатель игрушечной машинки работает от напряжения 6,00 В, развивая противо-ЭДС 4,50 В при нормальной скорости.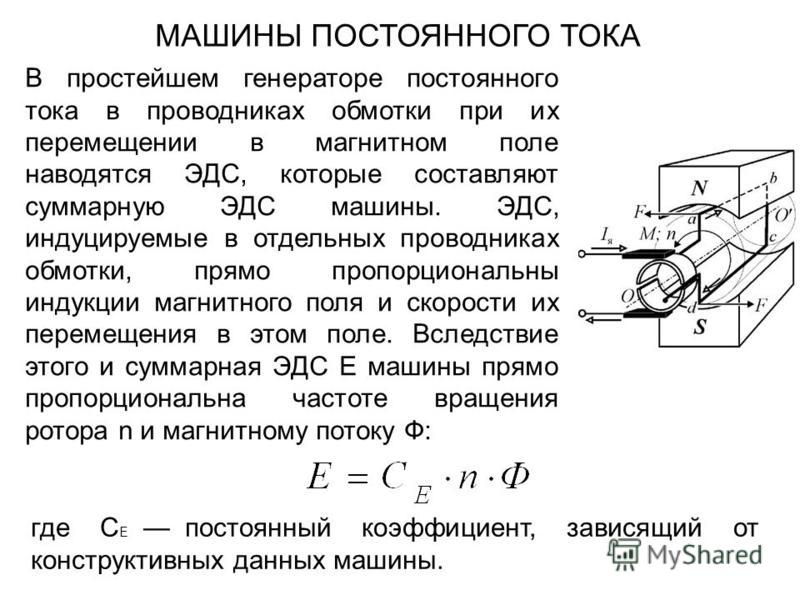 Если он потребляет 3,00 А при нормальной скорости, какой ток он потребляет при запуске?
Если он потребляет 3,00 А при нормальной скорости, какой ток он потребляет при запуске?
5. Интегрированные концепции Двигатель игрушечной машинки питается от четырех последовательно соединенных батарей, общая ЭДС которых составляет 6,00 В. Двигатель потребляет 3,00 А и развивает противо-ЭДС 4,50 В при нормальной скорости. Каждая батарея имеет внутреннее сопротивление 0,100 Ом. Каково сопротивление двигателя?
Глоссарий
- обратная ЭДС:
- ЭДС, создаваемая работающим двигателем, поскольку она состоит из катушки, вращающейся в магнитном поле; он противостоит напряжению, питающему двигатель
Упражнения
1. (a) 12,00 Ом (b) 1,67 А
3. 72,0 В
5. 0,100 Ом
ПротивоЭДС | Физика |
Цель обучения
К концу этого раздела вы сможете:
- Объяснить, что такое противо-ЭДС и как она индуцируется.
Было замечено, что двигатели и генераторы очень похожи.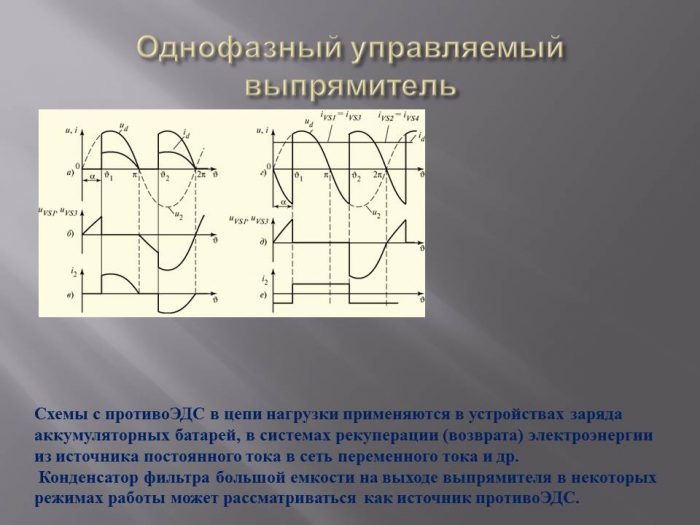 Генераторы преобразуют механическую энергию в электрическую, а двигатели преобразуют электрическую энергию в механическую. Кроме того, двигатели и генераторы имеют одинаковую конструкцию. Когда катушка двигателя поворачивается, магнитный поток изменяется, и индуцируется ЭДС (в соответствии с законом индукции Фарадея). Таким образом, двигатель действует как генератор всякий раз, когда его катушка вращается. Это произойдет независимо от того, вращается ли вал с помощью внешнего источника, такого как ременная передача, или под действием самого двигателя. То есть, когда двигатель совершает работу и его вал вращается, возникает ЭДС. Закон Ленца говорит нам, что ЭДС противодействует любому изменению, так что входной ЭДС, питающей двигатель, будет противодействовать ЭДС, создаваемая самим двигателем, называемая 9.0011 противо-ЭДС двигателя. (См. рис. 1.)
Генераторы преобразуют механическую энергию в электрическую, а двигатели преобразуют электрическую энергию в механическую. Кроме того, двигатели и генераторы имеют одинаковую конструкцию. Когда катушка двигателя поворачивается, магнитный поток изменяется, и индуцируется ЭДС (в соответствии с законом индукции Фарадея). Таким образом, двигатель действует как генератор всякий раз, когда его катушка вращается. Это произойдет независимо от того, вращается ли вал с помощью внешнего источника, такого как ременная передача, или под действием самого двигателя. То есть, когда двигатель совершает работу и его вал вращается, возникает ЭДС. Закон Ленца говорит нам, что ЭДС противодействует любому изменению, так что входной ЭДС, питающей двигатель, будет противодействовать ЭДС, создаваемая самим двигателем, называемая 9.0011 противо-ЭДС двигателя. (См. рис. 1.)
Рис. 1. Катушка двигателя постоянного тока представлена на этой схеме в виде резистора. Обратная ЭДС представлена как переменная ЭДС, противодействующая той, что приводит в движение двигатель. Обратная ЭДС равна нулю, когда двигатель не вращается, и увеличивается пропорционально угловой скорости двигателя.
Обратная ЭДС равна нулю, когда двигатель не вращается, и увеличивается пропорционально угловой скорости двигателя.
Противо-ЭДС — это мощность генератора двигателя, поэтому она пропорциональна угловой скорости двигателя ω . Он равен нулю при первом включении двигателя, что означает, что катушка получает полное управляющее напряжение, а двигатель потребляет максимальный ток, когда он включен, но не вращается. По мере того, как двигатель вращается все быстрее и быстрее, обратная ЭДС растет, всегда противодействуя ЭДС возбуждения, и снижает напряжение на катушке и величину потребляемого ею тока. Этот эффект заметен в ряде ситуаций. При первом включении пылесоса, холодильника или стиральной машины свет в той же цепи ненадолго гаснет из-за IR Падение, возникающее в фидерных линиях из-за большого тока, потребляемого двигателем. Когда двигатель впервые включается, он потребляет больше тока, чем когда он работает на своей нормальной рабочей скорости. Когда на двигатель воздействует механическая нагрузка, например, электрическая инвалидная коляска, поднимающаяся в гору, двигатель замедляется, обратная ЭДС падает, протекает больший ток и можно выполнить больше работы. Если двигатель работает на слишком низкой скорости, больший ток может привести к его перегреву (через резистивную мощность в катушке, P = I 2 R ), возможно даже выжечь. С другой стороны, если на двигатель не действует механическая нагрузка, его угловая скорость будет увеличиваться на ω до тех пор, пока противо-ЭДС не станет почти равной движущей ЭДС. Тогда двигатель использует ровно столько энергии, сколько необходимо для преодоления трения.
Когда на двигатель воздействует механическая нагрузка, например, электрическая инвалидная коляска, поднимающаяся в гору, двигатель замедляется, обратная ЭДС падает, протекает больший ток и можно выполнить больше работы. Если двигатель работает на слишком низкой скорости, больший ток может привести к его перегреву (через резистивную мощность в катушке, P = I 2 R ), возможно даже выжечь. С другой стороны, если на двигатель не действует механическая нагрузка, его угловая скорость будет увеличиваться на ω до тех пор, пока противо-ЭДС не станет почти равной движущей ЭДС. Тогда двигатель использует ровно столько энергии, сколько необходимо для преодоления трения.
Рассмотрим, например, катушки двигателя, представленные на рисунке 1. Катушки имеют эквивалентное сопротивление 0,400 Ом и приводятся в действие ЭДС 48,0 В. Вскоре после включения они потребляют ток I = В/R = (48,0 В)/(0,400 Ом) = 120 А и, таким образом, рассеять P = I 2 R = 5,76 кВт энергии в виде теплопередачи. При нормальных условиях работы этого двигателя предположим, что противо-ЭДС равна 40,0 В. Тогда при рабочей скорости общее напряжение на катушках составляет 8,0 В (48,0 В минус противо-ЭДС 40,0 В), а потребляемый ток равен I = В/об = (8,0 В)/(0,400 Ом) = 20 А. Таким образом, при нормальной нагрузке рассеиваемая мощность составляет P = IV = (20 А)/(8,0 В) = 160 Вт. Последнее не создаст проблем для этого двигателя, в то время как первые 5,76 кВт сожгут катушки, если будут продолжаться.
При нормальных условиях работы этого двигателя предположим, что противо-ЭДС равна 40,0 В. Тогда при рабочей скорости общее напряжение на катушках составляет 8,0 В (48,0 В минус противо-ЭДС 40,0 В), а потребляемый ток равен I = В/об = (8,0 В)/(0,400 Ом) = 20 А. Таким образом, при нормальной нагрузке рассеиваемая мощность составляет P = IV = (20 А)/(8,0 В) = 160 Вт. Последнее не создаст проблем для этого двигателя, в то время как первые 5,76 кВт сожгут катушки, если будут продолжаться.
Резюме раздела
- Любая вращающаяся катушка будет иметь ЭДС индукции — в двигателях это называется обратной ЭДС, поскольку она противодействует входной ЭДС двигателя.
Концептуальные вопросы
1. Предположим, вы обнаружили, что ременная передача, соединяющая мощный двигатель с кондиционером, сломана, и двигатель работает свободно. Стоит ли беспокоиться о том, что двигатель потребляет много энергии без всякой полезной цели? Объясните, почему да или почему нет.
Задачи и упражнения
1. Предположим, что двигатель, подключенный к источнику 120 В, при первом запуске потребляет 10,0 А. а) Каково его сопротивление? (b) Какой ток он потребляет при нормальной рабочей скорости, когда он развивает противо-ЭДС 100 В?
2. Двигатель, работающий от электричества 240 В, имеет противо-ЭДС 180 В при рабочей скорости и потребляет ток 12,0 А. а) Каково его сопротивление? б) Какой ток он потребляет при первом запуске?
3. Какова противоЭДС двигателя на 120 В, который потребляет 8,00 А при нормальной скорости и 20,0 А при первом запуске?
4. Двигатель игрушечной машинки работает от напряжения 6,00 В, развивая при нормальной скорости противо-ЭДС 4,50 В. Если он потребляет 3,00 А при нормальной скорости, какой ток он потребляет при запуске?
5. Интегрированные концепции Двигатель игрушечной машинки питается от четырех последовательно соединенных батарей, которые создают общую ЭДС 6,00 В. Двигатель потребляет 3,00 А и развивает противо-ЭДС 4,50 В при нормальной скорости. Каждая батарея имеет внутреннее сопротивление 0,100 Ом. Каково сопротивление двигателя?
Двигатель потребляет 3,00 А и развивает противо-ЭДС 4,50 В при нормальной скорости. Каждая батарея имеет внутреннее сопротивление 0,100 Ом. Каково сопротивление двигателя?
Глоссарий
- обратная ЭДС:
- ЭДС, создаваемая работающим двигателем, поскольку она состоит из катушки, вращающейся в магнитном поле; противодействует напряжению, питающему двигатель
Упражнения
1. (a) 12,00 Ом (b) 1,67 А
3. 72,0 В
5. 0,100 Ом
Лицензии и авторские права
Содержимое по лицензии CC, опубликованное ранее
- College Physics. Автор: : Колледж OpenStax. Расположен по адресу : https://openstax.org/books/college-physics/pages/1-introduction-to-science-and-the-realm-of-physics-physical-quantities-and-units. Лицензия : CC BY: Attribution . Условия лицензии : Лицензия
Заряженные электромобили | Пристальный взгляд на заднюю электродвижущую силу
Опубликовано автором Jeffrey Jenkins и размещено в рубриках «Особенности», «Флоты и инфраструктура», «Технические характеристики».
Почему двигатели генерируют и генерируют двигатели
В предыдущей статье я подробно рассмотрел рекуперативное торможение и упомянул старую технику, говорящую, что каждый двигатель — это генератор, а каждый генератор — это двигатель (с оговоркой, что некоторые из них больше подходят для противоположной цели, чем другие). На этот раз я остановлюсь немного глубже на эффекте, называемом обратной (или встречной) ЭДС, которая является ключевой концепцией, которая делает это высказывание верным, а также той, которую, кажется, бесконечно неправильно понимают и злоупотребляют (особенно со стороны свободной энергии). сверхединая толпа).
Первым ключом к демистификации обратной ЭДС является ее альтернативное название, встречная ЭДС. Во-вторых, определить и упростить ЭДС, что означает «электродвижущая сила», что в основном то же самое, что и напряжение 1 . Таким образом, обратная ЭДС (или сокращенно БЭДС) — это напряжение, которое противодействует другому напряжению.
Таким образом, обратная ЭДС (или сокращенно БЭДС) — это напряжение, которое противодействует другому напряжению.
Более конкретно, это напряжение, индуцируемое в проводнике, который подвергается воздействию изменяющегося во времени магнитного поля и противодействует внешнему напряжению, приложенному к указанному проводнику. Единственными устройствами, которые могут испытывать BEMF, являются катушки индуктивности (включая трансформаторы) и двигатели, и только при подаче на них внешнего напряжения.
В этот момент ваши глаза вполне могут остекленеть… Я имею в виду, какое, черт возьми, BEMF имеет отношение к ценам на яйца в Китае? Как оказалось, совсем ничего, но это объясняет, почему двигатели (и трансформаторы) потребляют так мало тока без нагрузки.
Например, рассмотрим простой двигатель постоянного тока с постоянными магнитами, сопротивление на клеммах которого составляет 0,1 Ом. Если мы подадим на этот двигатель 10 В, то мы должны ожидать, что он будет потреблять начальный импульс тока до 100 А, но если валу позволить свободно вращаться, то ток быстро упадет до очень низкого значения (возможно, 1 А) потому что при этом совершается небольшая механическая работа (только та, которая необходима для преодоления трения и сопротивления воздуха).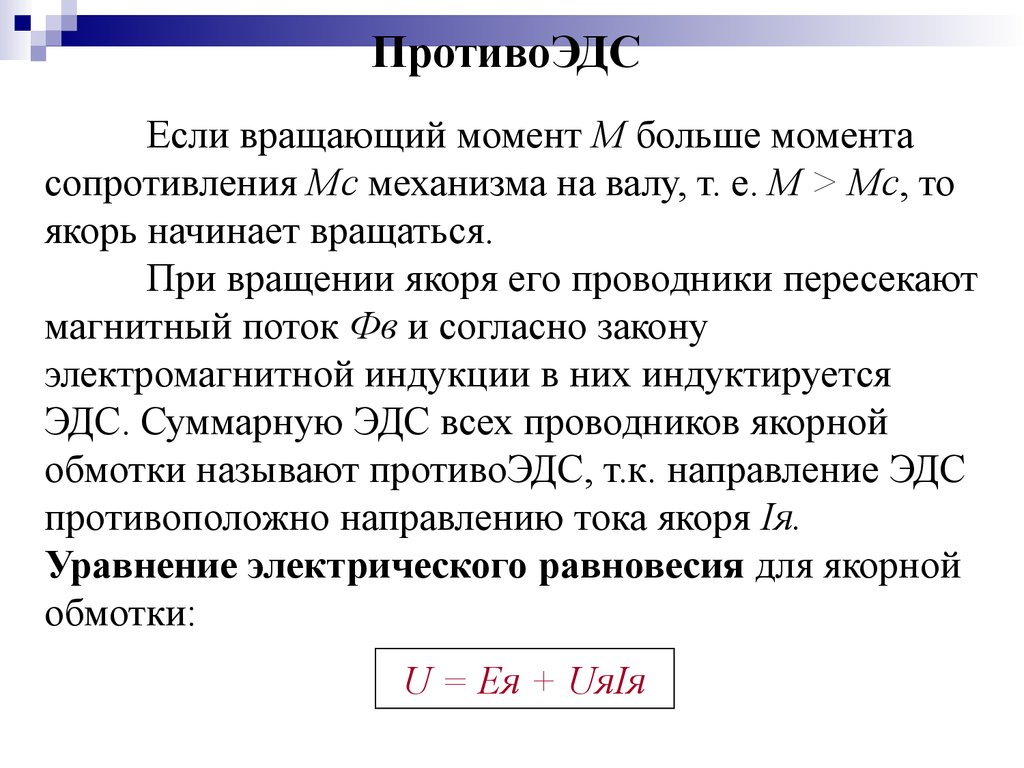
Если вспомнить, что электрическая мощность — это напряжение, умноженное на силу тока, а механическая мощность — это крутящий момент, умноженный на число оборотов в минуту, можно объяснить, почему для вращения ненагруженного двигателя требуется так мало электроэнергии. Также неудивительно, что ток, потребляемый этим двигателем, будет увеличиваться пропорционально величине крутящего момента на валу, достигая предела в 100 А (т. е. 10 В / 0,1 Ом), когда вал заглох (при условии и проводка имеют нулевое сопротивление и могут подавать этот ток).
Из простого наблюдения неясно, почему двигатель потребляет только электроэнергию, необходимую для обеспечения требуемой от него механической мощности (плюс неизбежные потери). Это происходит не потому, что сопротивление двигателя изменяется — хотя оно имеет тенденцию к увеличению по мере нагревания — скорее, это связано с тем, что проводники в якоре движутся мимо стационарного магнитного поля, создаваемого постоянными магнитами, и, следовательно, в них индуцируется напряжение. их, что противостоит приложенному напряжению, то есть: BEMF. Это индуцированное напряжение пропорционально напряженности магнитного поля, скорости его изменения (которую испытывают провода, когда они проходят мимо полюсных наконечников) и количеству витков провода.
их, что противостоит приложенному напряжению, то есть: BEMF. Это индуцированное напряжение пропорционально напряженности магнитного поля, скорости его изменения (которую испытывают провода, когда они проходят мимо полюсных наконечников) и количеству витков провода.
Полярность индуцированного напряжения (BEMF) противоположна приложенному напряжению, поэтому оно снижает «фактическое» напряжение, испытываемое витками якоря, что снижает величину тока, протекающего через двигатель. Это объясняет, почему ненагруженный двигатель потребляет небольшой ток, и почему заглохший двигатель потребляет максимальный ток, но почему умеренно нагруженный двигатель потребляет умеренный ток? В двух словах, это потому, что всякий раз, когда ток течет по проводу, он создает магнитное поле 2 . Таким образом, поскольку двигатель в нашем примере более нагружен, он немного замедляется, что снижает BEMF и позволяет протекать большему току. Затем этот ток сильнее сопротивляется статическому полю постоянных магнитов, пока не будет достигнуто новое равновесие (обратите внимание, что именно поэтому вы должны быть очень осторожны с перегрузкой двигателей полями постоянных магнитов — слишком большой ток через них приведет к размагничиванию магнитов).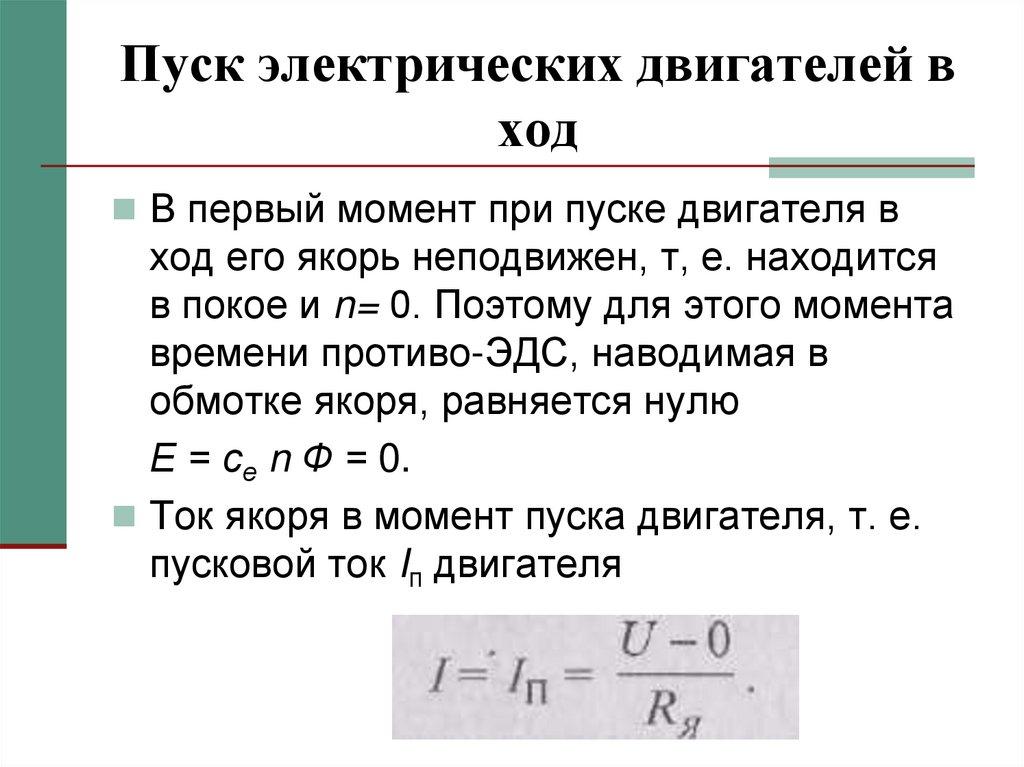 .
.
Хотя легко представить создание BEMF в двигателях, которые используют постоянные магниты для поля (например, вышеупомянутый двигатель постоянного тока с постоянными магнитами или варианты переменного тока, которые популярны в электромобилях OEM), все двигатели демонстрируют это явление. Единственное отличие состоит в том, что форма волны BEMF будет имитировать форму волны двигателя. Другими словами, двигатель постоянного тока с постоянными магнитами будет создавать БЭМП постоянного тока, асинхронный двигатель переменного тока будет создавать синусоидальное БЭМП, а типы двигателей переменного тока с постоянными магнитами будут создавать либо синусоидальное, либо трапециевидное БЭМП, в зависимости от распределения обмоток в якоре 9.0025 3 .
Это верно даже для современных приводов, использующих широтно-импульсную модуляцию или ШИМ для управления скоростью и/или крутящим моментом двигателя. ШИМ-привод разбивает напряжение питания постоянного тока на дискретные импульсы, среднее значение которых должно быть меньше или равно напряжению питания (минус один или два вольта при падении напряжения на переключателях во включенном состоянии).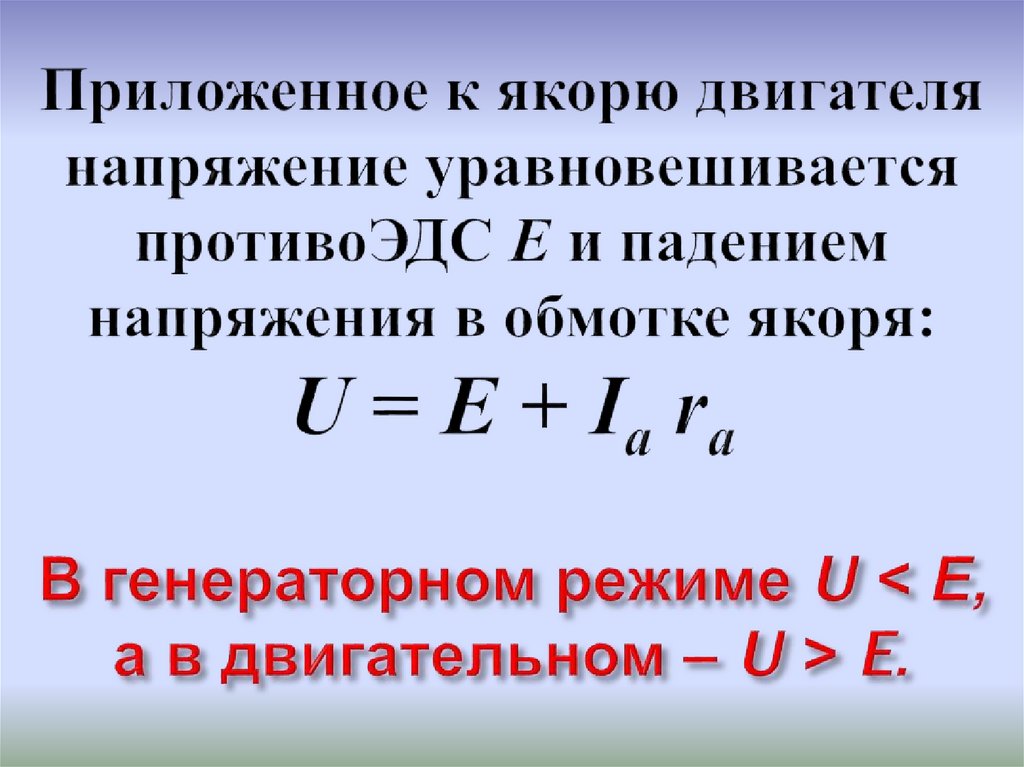 Таким образом, в приводе постоянного тока среднее напряжение, подаваемое на двигатель, может варьироваться от 0 В до уровня чуть ниже напряжения питания. Как это влияет на форму волны BEMF, скажем, в асинхронном двигателе? Пока частота ШИМ достаточно высока (и/или инерция нагрузки достаточно высока), среднее напряжение будет вызывать протекание среднего тока. Этот средний ток приведет к среднему крутящему моменту, который, работая против сопротивления нагрузки, приведет к средней скорости. Я продолжаю повторять слово «средний», чтобы подчеркнуть, что вал двигателя вращается непрерывно, а не «шагает» на дискретную угловую величину каждый раз, когда выход PWMed включен, и делает паузу каждый раз, когда выход выключен (например, шаговый двигатель). Пока вал вращается плавно (либо из-за высокой инерции, высокой частоты ШИМ, либо из-за того и другого), форма сигнала BEMF будет выглядеть так же, как если бы двигатель питался от батареи с тем же напряжением, что и усредненное выходное напряжение привода.
Таким образом, в приводе постоянного тока среднее напряжение, подаваемое на двигатель, может варьироваться от 0 В до уровня чуть ниже напряжения питания. Как это влияет на форму волны BEMF, скажем, в асинхронном двигателе? Пока частота ШИМ достаточно высока (и/или инерция нагрузки достаточно высока), среднее напряжение будет вызывать протекание среднего тока. Этот средний ток приведет к среднему крутящему моменту, который, работая против сопротивления нагрузки, приведет к средней скорости. Я продолжаю повторять слово «средний», чтобы подчеркнуть, что вал двигателя вращается непрерывно, а не «шагает» на дискретную угловую величину каждый раз, когда выход PWMed включен, и делает паузу каждый раз, когда выход выключен (например, шаговый двигатель). Пока вал вращается плавно (либо из-за высокой инерции, высокой частоты ШИМ, либо из-за того и другого), форма сигнала BEMF будет выглядеть так же, как если бы двигатель питался от батареи с тем же напряжением, что и усредненное выходное напряжение привода.
То же самое происходит в двигателе переменного тока, за исключением, конечно, того, что соотношение времени включения и времени выключения изменяется для создания синусоидального среднего напряжения и, следовательно, синусоидального среднего тока. Форма волны BEMF также будет синусоидальной, с учетом того же требования, чтобы частота ШИМ и/или инерция нагрузки были достаточно высокими, чтобы крутящий момент был практически без пульсаций. Таким образом, BEMF ограничивает ток через двигатель, когда вал не остановлен, и это объясняет, почему ток, потребляемый двигателем, пропорционален нагрузке, а не только приложенному напряжению, деленному на сопротивление. BEMF также можно использовать для «бессенсорного» управления скоростью, с той оговоркой, что некоторые типы двигателей, например. щеточный DC и трапециевидный PMAC – более других поддаются этому. Однако BEMF не может выполнять полезную работу сам по себе, поэтому никаких бесплатных обедов и никаких шапочек из фольги!
Сноски
1 Для любителей подробностей, ЭДС более правильно определить как генерируемое напряжение разности потенциалов, т. е. напряжение, создаваемое батареей, фотогальваническим элементом, генератором и т. д., по сравнению с падением напряжения на сопротивлении.
е. напряжение, создаваемое батареей, фотогальваническим элементом, генератором и т. д., по сравнению с падением напряжения на сопротивлении.
2 Закон Ленца
3 Да, двигатели переменного тока имеют «якорь» — это просто часть двигателя, на которую воздействует изменяющееся во времени магнитное поле, а не та часть, которая создает постоянное поле (которое довольно невообразимо называется полем) .
Джеффри Дженкинс — технический редактор Charged, гуру силовой электроники и главный электронщик Evnetics.
Подробнее EV Tech Объяснение статей .
Первоначально эта статья была опубликована в выпуске Charged 9 — август 2013 г. — Подпишитесь здесь.
Теги: Силовая электроника EV, Объяснение технологии EV Зарегистрироваться. Уже зарегистрирован? Авторизоваться Не пропустите нашу следующую виртуальную конференцию 17-20 октября 2022 года.
Зарегистрируйтесь на бесплатные вебинары ниже и зарезервируйте место, чтобы посмотреть их в прямом эфире или по запросу.
