Как рассчитать пусковой ток асинхронного двигателя. Какие существуют способы снижения пускового тока. Чем опасны высокие пусковые токи. Какие схемы запуска двигателей позволяют ограничить пусковой ток.
Что такое пусковой ток двигателя и чем он опасен
Пусковой ток — это кратковременный бросок тока, возникающий в момент запуска электродвигателя. Его величина может в 5-7 раз превышать номинальный рабочий ток двигателя.
Высокие пусковые токи представляют опасность по нескольким причинам:
- Вызывают значительные провалы напряжения в питающей сети
- Создают повышенные нагрузки на коммутационную аппаратуру
- Приводят к преждевременному износу изоляции обмоток двигателя
- Могут вызвать срабатывание защитных устройств
Поэтому ограничение пусковых токов является важной задачей при эксплуатации электродвигателей, особенно мощных.
Формулы для расчета пускового тока
Пусковой ток асинхронного двигателя можно рассчитать по следующим формулам:
Для трехфазного двигателя:
Iпуск = kп * Iном
Где:
- Iпуск — пусковой ток
- kп — кратность пускового тока (5-7 для стандартных двигателей)
- Iном — номинальный ток двигателя
Для однофазного двигателя:
Iпуск = Pном * 1000 / (U * η * cosφ)
Где:
- Pном — номинальная мощность двигателя, кВт
- U — напряжение питания, В
- η — КПД двигателя
- cosφ — коэффициент мощности
Способы снижения пускового тока двигателя
Существует несколько основных способов уменьшения пускового тока асинхронного двигателя:
- Пуск через автотрансформатор или реактор
- Переключение обмоток статора со звезды на треугольник
- Использование устройств плавного пуска
- Применение преобразователей частоты
- Реостатный пуск для двигателей с фазным ротором
Рассмотрим подробнее каждый из этих методов.
Пуск через автотрансформатор или реактор
При данном способе пуска на обмотки двигателя подается пониженное напряжение через автотрансформатор или реактор. Это позволяет снизить пусковой ток в 2-3 раза. По мере разгона двигателя напряжение плавно повышается до номинального.

Преимущества метода:
- Простота реализации
- Невысокая стоимость оборудования
Недостатки:
- Снижение пускового момента
- Увеличение времени разгона
Переключение обмоток со звезды на треугольник
Этот способ применяется для трехфазных двигателей с возможностью переключения обмоток. В момент пуска обмотки соединяются звездой, что снижает напряжение на каждой обмотке в √3 раз. После разгона производится переключение на треугольник.
Достоинства метода:
- Простота и надежность
- Снижение пускового тока в 3 раза
Недостатки:
- Применим только для двигателей с выведенными концами обмоток
- Уменьшение пускового момента в 3 раза
Использование устройств плавного пуска
Устройства плавного пуска (УПП) обеспечивают постепенное нарастание напряжения на обмотках двигателя за счет управления углом открытия тиристоров. Это позволяет ограничить пусковой ток и момент.
Преимущества УПП:
- Эффективное ограничение пускового тока
- Снижение механических нагрузок на двигатель
- Возможность настройки параметров пуска
Недостатки:
- Относительно высокая стоимость
- Необходимость подбора УПП под конкретный двигатель
Применение преобразователей частоты
Частотный преобразователь позволяет осуществлять плавный пуск двигателя за счет постепенного увеличения частоты питающего напряжения. При этом пусковой ток ограничивается на уровне номинального.
Достоинства метода:
- Максимальное ограничение пускового тока
- Возможность регулирования скорости вращения
- Высокая энергоэффективность
Недостатки:
- Высокая стоимость оборудования
- Сложность настройки и обслуживания
Реостатный пуск двигателей с фазным ротором
Для двигателей с фазным ротором применяется ступенчатый пуск с постепенным выведением пускового реостата в цепи ротора. Это позволяет ограничить пусковой ток и увеличить пусковой момент.
Преимущества:
- Эффективное снижение пускового тока
- Увеличение пускового момента
Недостатки:
- Применим только для двигателей с фазным ротором
- Наличие подвижных контактов снижает надежность
Выбор оптимального способа ограничения пускового тока
При выборе метода снижения пускового тока необходимо учитывать следующие факторы:
- Мощность и тип двигателя
- Характер нагрузки на валу
- Требования к величине пускового момента
- Частоту пусков
- Экономическую целесообразность
Для двигателей малой мощности (до 15 кВт) чаще всего применяют прямой пуск. Для средних мощностей (15-90 кВт) оптимальны переключение звезда-треугольник или УПП. Мощные двигатели (свыше 90 кВт) запускают через преобразователи частоты или устройства плавного пуска.
Заключение
Ограничение пусковых токов электродвигателей позволяет повысить надежность электроснабжения, снизить нагрузки на коммутационную аппаратуру и увеличить срок службы самих двигателей. Выбор оптимального способа пуска зависит от конкретных условий эксплуатации и технико-экономических факторов.
Ток электродвигателя, какую силу тока потребляет двигатель, мотор при пуске и работе.
Производители на самом корпусе электрических двигателей ставят металлическую табличку, на которой написаны основные характеристики данного электродвигателя.
На этой табличке указан и ток, который потребляет данная электрическая машина при своей номинальной работе (средне допустимой, с нормальной нагрузкой на валу двигателя). Данная надпись может иметь два значения, например 5,9/3,4А, что означает – при подключении двигателя в режиме «треугольник» номинальные ток будет равен 5,9 ампер, а при подключении в режиме «звезда» он будет 3,4 ампера. На этой же табличке можно увидеть и символы, указывающие данные режимы работы.
Если по каким-то причинам на корпусе электродвигателя нет надписи, какую номинальную силу тока он потребляет, то ток можно вычислить по следующей формуле (если конечно известны все остальные, имеющиеся в этой формуле, величины!):
При отсутствии металлической таблички с основными характеристиками на корпусе электрического двигателя можно пойти более простым путем, чтобы узнать приближенную силу тока, потребляемой движком. Если известна номинальная мощность двигателя, то применим следующее условие – «киловатт электрической мощности равен двум амперам тока» (это условие подходит для электродвигателей с мощностью от 3-х киловатт и более, то есть будет максимально приближенным). Например, у нас есть асинхронный электрический двигатель мощностью 5 кВт (5000 ватт). Следовательно, приближенное значение потребляемого тока будет около 10 ампер. Может возникнуть небольшая непонятка. Если воспользоваться простой формулой вычисления тока, зная мощность и напряжение: 5000 ватт / 380 вольт = 13,15 ампер. Но ведь у электродвигателей есть свой коэффициент полезного действия, который вовсе не равен 100% и косинус фи, который также меньше единицы. Вот мы и получаем, что реальная сила тока будет ближе к значению 10 ампер, а не 13,15 ампер.
Практическим вариантом узнать значение силы тока, который потребляется электродвигателем при его номинальной работе, будет использование обычного амперметра, или токоизмерительных клещей. При уверенности в том, что наш электродвигатель точно рассчитан на то напряжение, что мы собираемся на него подать, мы даем питание на него. Далее, все просто, берем токоизмерительные клещи и измеряем силу тока на проводах, что питают наш электродвигатель. Причем еще стоит обратить внимание на то, что у трехфазного электродвигателя рабочие токи должны быть одинаковыми на всех трех фазах. Если Вы вдруг обнаружили факт неодинаковости, то причиной может быть, как перекос фаз электрического питания, так и неисправности самого электродвигателя, который может в скором времени вовсе выйти из строя из-за ненормального режима своей работы. В любом случае желательно выяснить причину неодинаковости значений силы тока на проводах.
Помимо номинального тока, который потребляется электродвигателем при нормальной своей работе, существует еще так называемый пусковой ток. Его величина может быть превышать номинальный ток аж в 3-8 раз. То есть, когда мы подаем питание на электрический двигатель, который до этого находился в состоянии покоя, в начальный момент по его обмоткам начинает протекать увеличенный ток по причине нескомпенсированности сил электромагнитных полей внутри двигателя. Чем быстрее электродвигатель начинает вращаться, тем меньше тока он начинает потреблять. То есть, пусковым током считается то значение электрического тока, которое существует с момента включения электродвигателя и до выхода его на свои номинальные обороты (время разгона двигателя от нуля до нормального значения).
Минимальный ток, что будет течь через обмотки электрического двигателя, будет тогда, когда движок работает на холостом ходу (то есть, к его валу не подсоединено ни одной механической нагрузки). Следовательно, чем сильнее мы нагрузим вал двигателя, тем большую силу тока начнет он потреблять. Номинальной нагрузкой считается та, на которую изначально данный электродвигатель был рассчитан при своем изготовлении, и при которой эта электрическая машина может работать продолжительное время без вреда для себя. Имеется также понятие о максимальной нагрузке, при которой сила тока, что потребляется двигателем, находится на предельно допустимом значении. При максимальных токах электродвигатели могут работать лишь незначительный промежуток времени, поскольку длительная работа может негативно влиять на сам движок (перегрев), сокращая его общий срок службы.
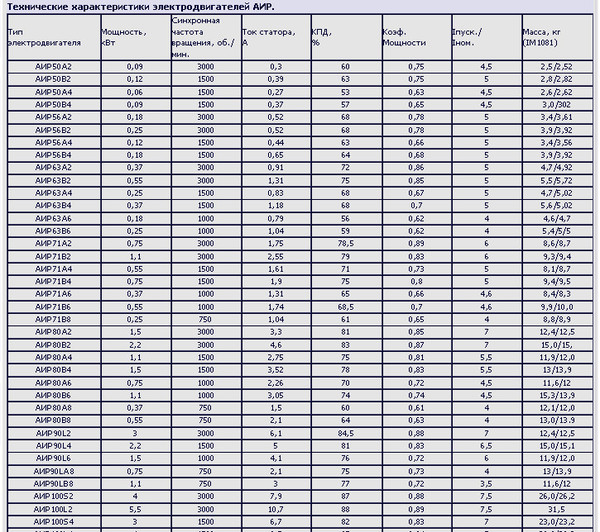
Пусковые токи у разных электродвигателей разные, их можно посмотреть в справочных таблицах, где прописаны характеристики каждого конкретного движка. Для чего нужно знать значение пусковых токов? Для того, чтобы правильно подобрать устройства защиты для электрических цепей, которые непосредственно относятся к схеме этого электрического двигателя. Например, зная конкретную величину пускового тока мы правильно можем подобрать тепловую защиту под него, автоматически выключатель, что отвечает за включение и выключение данного двигателя и т.д. Это избавит нас от таких проблем как постоянное срабатывание токовой защиты (если устройство рассчитано на меньший ток, чем нужно) или не срабатывание тогда, когда это нужно (если ток срабатывания устройства гораздо больше нужного).
Большие пусковые токи – это негативное явление, которое на короткий промежуток времени создает просадку питающей сети. В этой электросети возникает кратковременное падение напряжения. Как можно уменьшить пусковые токи электродвигателя? Первый вариант (классический), это запускать электродвигатель по схеме «звезда», а спустя некоторое время переключаться на схему «треугольник». В этом случае при включении начальный, пусковой ток будет относительно небольшой, а при переключении режима в «треугольник» движок выйдет на свои номинальные обороты.
Иными вариантами снижения пусковых токов электродвигателя являются использование различных устройств плавного пуска, которые за счет электронных схем контролируют начальный режим разгона электрической машины. Допустим при использовании преобразователей частоты можно легко задать нужные параметры для старта и последующий работы электрического двигателя.
P.S. Правильные режим работы любого электродвигателя способствует увеличению общего срока службы данного электротехнического устройства, а также щадящей работе тех электрических цепей, что относятся к питанию данного устройства (включая и саму питающую сеть).
Пусковой момент асинхронного двигателя: расчет и способы увеличения
Переход двигателя из покоя в рабочее состояние называют пусковым моментом асинхронного электродвигателя. При этом подразумевается, что на обмотки двигателя подано номинальное напряжение стандартной частоты. Этот временной промежуток называют «моментом трогания», «начальным моментом» или «начальный пусковой момент асинхронного двигателя». При этом электродвигатель потребляет максимальное количество электроэнергии. Она расходуется на преодоление тормозного момента вала, потерь в двигателе для придания вращательного момента механизмам. В этой статье мы расскажем читателям сайта Сам Электрик, как рассчитывается пусковой момент электродвигателя и как его можно увеличить.
Расчет пускового момента
Пусковой момент, который зависит от номинального усилия на валу и кратности пускового момента, можно вычислить по формуле:
Мпуск=Мн*Кпуск.,
где:
- Мн — номинальное усилие на валу электродвигателя;
- Кпуск.— кратность пусков, паспортная величина, которая принимает значения от 1,5 до 6.
На практике применяют другую формулу:
Мпуск=9,55*Р2* 1000/F1,
Необходимые данные указываются на шильдике двигателя или в паспорте, где F1 — номинальные обороты.
Р2 равна номинальной мощности в кВт, является расчетной величиной.
Для того, чтобы узнать значение Р2, следует воспользоваться формулой, в которой учитываются пусковой ток, напряжение сети, скольжение. Эти данные можно узнать в паспорте, справочнике или на сайте завода-изготовителя.
Р2=(1,732*U*Iпуск)/S1*1000.
Методы увеличения М
пускИз формулы видно, от чего зависит пусковой момент асинхронного двигателя и как увеличить его, изменяя параметры. Он зависит от мощности трехфазного двигателя и величины скольжения.
Мощность определяется по формуле, корень из 3 умноженный на напряжение и ток. Скольжение изменяет свое значение в зависимости от оборотов вала механизма. При оборотах двигателя равных нулю, скольжение принимает значение равное 1.
При разгоне электродвигателя оно уменьшается и стремится к нулю при достижении номинальных оборотов ротора. Для того чтобы увеличить пусковой момент, достаточно увеличить пусковой ток или питающее напряжение. Величину скольжения изменить нельзя.
Для примера приведем расчет пускового момента, используя паспортные данные некоторых двигателей. Результат сведен в нижеприведенную таблицу:
При этом следует помнить, что использование электродвигателя в механизмах с пусковым моментом, превышающим усилие двигателя на валу – недопустимо. В этом случае электродвигатель не сможет преодолеть потери в двигателе и тормозной момент механизма. Он просто выйдет из строя. Т.е. усилие электродвигателя недостаточно для нормальной работы устройства.
Схемы включения асинхронного двигателя
Для уменьшения воздействия пусковых токов применяются различные схемы включения. Это зависит от механизма и мощности электродвигателя.
Типовое включение двигателя осуществляется напрямую. Напряжение на обмотки подается через магнитный пускатель.
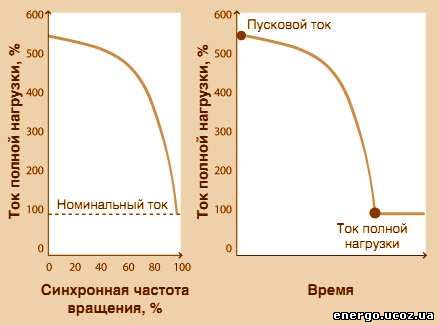
Во время пуска в сети возникает бросок тока, который превышает номинальный в 5-7 раз. Длительность зависит от мощности электродвигателя и нагрузки на валу. Чем мощнее устройство, тем длительнее период разгона.
В результате возникает понижение напряжения в сети, что отрицательно сказывается на аппаратуре, подключенной к этой цепи. Маломощные не оказывают существенного влияния на сети.
На графике снизу представлена зависимость тока от времени разгона электродвигателя:
При запуске мощного электропривода 10 и более кВт следует ограничивать пусковой ток. Это необходимо, чтобы сети не испытывали значительные перегрузки, в результате, которой происходит понижение напряжения сети, что приводит к нештатной ситуации.
Для этого применяются схемы переключения с треугольника на звезду, используются токоограничивающие устройства или частотные преобразователи.
Способы снижения пусковых токов АД
Уменьшить пусковые токи асинхронного двигателя можно несколькими способами. Перечислим их по порядку.
Наиболее распространенным методом, является запуск двигателя при пониженном напряжении. Для чего коммутируют обмотки асинхронного двигателя. В начальный момент пуска, обмотки переключают с треугольника на звезду. После набора оборотов коммутацию возвращают в первоначальное положение. При этом следует учитывать, что пусковой момент при таком запуске уменьшается. Например, при снижении напряжения в 1,72 (корень квадратный из 3) раза, момент уменьшится в три раза. Такой метод применяется при запуске механизмов с минимальной нагрузкой на валу, где установлены асинхронные электродвигатели с короткозамкнутым ротором.
Так же ограничение токов во время запуска двигателя осуществляют включением последовательно с обмотками статора индукционных сопротивлений. В некоторых случаях для этих целей используются резисторы. После выхода двигателя на оптимальные режимы, резисторы шунтируются.
На рисунке снизу показаны варианты запуска при пониженном напряжении:
Пуск при пониженном напряжении
При уменьшении нагрузки на валу можно регулировать пусковые токи. В первоначальный промежуток времени подключается часть нагрузки. После достижения оптимальных оборотов, подается полная нагрузка.
Для мощных устройств применяют реостатный запуск. Такой пуск используют для приводов укомплектованных асинхронными электродвигателями с фазным ротором. Регулировка производится ступенчато, т.е. резисторы отключаются постепенно с набором скорости вращения. Таким образом обеспечивается плавный пуск.
На рисунке снизу представлена принципиальная схема запуска:
График токов при прямом и плавном пуске электропривода:
Наиболее щадящий запуск механизмов обеспечивает пуск с помощью частотного преобразователя. В этом случае частотный преобразователь самостоятельно выбирает оптимальные режимы. При этом можно увеличить пусковой момент, не повышая нагрузку на сети. Использование частотного преобразователя полностью исключаются нежелательные броски тока в сети.
Вот и были рассмотрены способы увеличения пускового момента асинхронного двигателя, а также правильный его расчет. Если остались вопросы, задавайте их в комментариях под статьей!
|
Потребляемый ток
Пусковой ток двигателя Компенсация реактивной мощности потребляемой асинхронными двигателями Компенсацию реактивной мощности особенно рекомендуется проводить для двигателей, работающих в течение длительного времени при сниженной мощности. Как было показано выше, cosϕ = вход кВт/вход кВА , поэтому снижения значения входной мощности кВA увеличит (то есть, улучшит) значение cos ϕ. Ток, подаваемый на двигатель, после коррекции коэффициента мощности, вычисляется по формуле: где cos ϕ — коэффициент мощности до компенсации, а cos ϕ’ — коэффициент мощности после компенсации, Ia — первоначальный ток. В таблице даны, в зависимости от номинальной мощности двигателя, стандартные значения тока двигателя для различных величин номинального напряжения.
|
Номинальная мощность (Pn) двигателя в кВт S=Pn/ηcosϕ |
Пуск асинхронного двигателя | Электротехника
Пусковые свойства двигателей.
При пуске ротор двигателя, преодолевая момент нагрузки и момент инерции, разгоняется от частоты вращения п = 0 до п . Скольжение при этом меняется от sп = 1 до s. При пуске должны выполняться два основных требования: вращающий момент должен бить больше момента сопротивления (Мвр>Мс) и пусковой ток Iп должен быть по возможности небольшим.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска: прямой пуск, пуск с использованием дополнительных сопротивлений, пуск при пониженном напряжении и др. Ниже различные способы пуска рассматриваются более подробно.
Прямой пуск.
Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. Схема прямого пуска приведена на рис. 3.22. При включении рубильника в первый момент скольжение s = l, а приведенный ток в роторе и равный ему ток статора
, (3.37)
максимальны (см.п.3.19 при s=1). По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока kI = IП / I1НОМ = ( 5,…,7), причем большее значение относится к двигателям большей мощности.
Рис. 3.22
Значение пускового момента находится из (3.23) при s = 1:
,(3.38)
Из рис. 3.18 видно, что пусковой момент близок к номинальному и значительно меньше критического. Для серийных двигателей кратность пускового момента МП/ МНОМ = (1.0,…,1.8).
Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться.
С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места. В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт).
Пуск двигателей с улучшенными пусковыми свойствами.
Улучшение пусковых свойств асинхронных двигателей достигается использованием эффекта вытеснения тока в роторе за счет специальной конструкции беличьей клетки. Эффект вытеснения тока состоит в следующем: потокосцепление и индуктивное сопротивление X2 проводников в пазу ротора тем выше, чем ближе ко дну паза они расположены (рис.3.23). Также X2 прямо пропорционально частоте тока ротора.
Следовательно, при пуске двигателя, когда s=1 и f2 = f1 = 50 Гц , индуктивное сопротивление X2 = max и под влиянием этого ток вытесняется в наружный слой паза. Плотность тока j по координате h распределяется по кривой, показанной на рис.3.24. В результате ток в основном проходит по наружному сечению проводника, т.е. по значительно меньшему сечению стержня, и, следовательно, активное сопротивление обмотки ротора R2 намного больше, чем при нормальной работе. За счет этого уменьшается пусковой ток и увеличивается пусковой момент МП (см. (3.37), (3.38) ).
По мере разгона двигателя скольжение и частота тока ротора падает и к концу пуска достигает 1 – 4 Гц. При такой частоте индуктивное сопротивление мало и ток распределяется равномерно по всему сечению проводника. При сильно выраженном эффекте вытеснения тока становится возможным прямой пуск при меньших бросках тока и больших пусковых моментах.
К двигателям с улучшенными пусковыми свойствами относятся двигатели, имеющие роторы с глубоким пазом, с двойной беличьей клеткой и некоторые другие.
Рис.3.23 Рис. 3.24
Двигатели с глубокими пазами.
Как показано на рис.3.25, паз ротора выполнен в виде узкой щели, глубина которой примерно в 10 раз больше, чем ее ширина. В эти пазы-щели укладывается обмотка в виде узких медных полос. Распределение магнитного потока показывает, что индуктивность и индуктивное сопротивление в нижней части проводника значительно больше, чем в верхней части.
Рис.3.25
Поэтому при пуске ток вытесняется в верхнюю часть стержня и активное сопротивление значительно увеличивается. По мере разгона двигателя скольжение уменьшается, и плотность тока по сечению становится почти одинаковой.
В целях увеличения эффекта вытеснения тока глубокие пазы выполняются не только в виде щели, но и трапецеидальной формы. В этом случае глубина паза несколько меньше, чем при прямоугольной форме.
Двигатели с двойной клеткой.
В таких двигателях обмотки ротора выполняются в виде двух клеток (рис.3.26): во внешних пазах 1 размещается обмотка из латунных проводников, во внутренних 2 – обмотка из медных проводников.
Рис.3.26
Таким образом, внешняя обмотка имеет большее активное сопротивление, чем внутренняя. При пуске внешняя обмотка сцепляется с очень слабым магнитным потоком, а внутренняя – сравнительно сильным полем. В результате ток вытесняется во внешнюю клетку, а во внутренней тока почти нет.
По мере разгона двигателя ток из внешней клетки переходит во внутреннюю и при s =sНОМ протекает в основном по внутренней клетке. Ток во внешней клетке при этом сравнительно небольшой.
Результирующий пусковой момент, складывающийся из моментов от двух клеток, значительно больше, чем у двигателей нормальной конструкции, и несколько больше, чем у двигателей с глубоким пазом. Однако следует иметь в виду, что стоимость двигателей с двойной клеткой ротора выше.
Пуск переключением обмотки статора.
Если при нормальной работе двигателя фазы статора соединены в треугольник, то, как показано на рис.3.27, при пуске первоначально они соединяются в звезду.
Рис.3.27
Для этого сначала включается выключатель Q, а затем переключатель S ставится в нижнее положение Пуск. В таком положении концы фаз Х, Y, Z соединены между собой, т.е. фазы соединены звездой. При этом напряжение на фазе в √3 раз меньше линейного.
В результате линейный ток при пуске в 3 раза меньше, чем при соединении треугольником. При разгоне ротора в конце пуска переключатель S переводится в верхнее положение и, как видно из рис. 3.27, фазы статора пересоединяются в треугольник.
Недостатком этого способа является то, что пусковой момент также уменьшается в 3 раза, так как момент пропорционален квадрату фазного напряжения, которое в √3 раз меньше при соединении фаз звездой. Поэтому такой способ применим при небольшом нагрузочном моменте и только для двигателей, нормально работающих при соединении обмоток статора в треугольник.
Пуск при включении добавочных резисторов в цепь статора.(рис. 3.28)
Рис.3.28
Перед пуском выключатель (пускатель) находится в разомкнутом состоянии и замыкается выключатель Q1.
При этом в цепь статора включены добавочные резисторы RДОБ. В результате обмотка статора питается пониженным напряжением U1n = U1НОМ – InRДОБ. После разгона двигателя замыкается выключатель Q2 и обмотка статора включается на номинальное напряжение U1НОМ. Подбором RДОБ можно ограничить пусковой ток до допустимого.
Следует иметь в виду, что момент при пуске, пропорциональный U21П, будет меньше и составляет (U1П / U1НОМ)2 номинального. Важно отметить, что при этом способе пуска значительны потери в сопротивлении RДОБ (RДОБI21n). Можно вместо резисторов RДОБ включить катушки с индуктивным сопротивлением ХДОБ, близким к RДОБ.
Применение катушек позволяет уменьшить потери в пусковом сопротивлении.
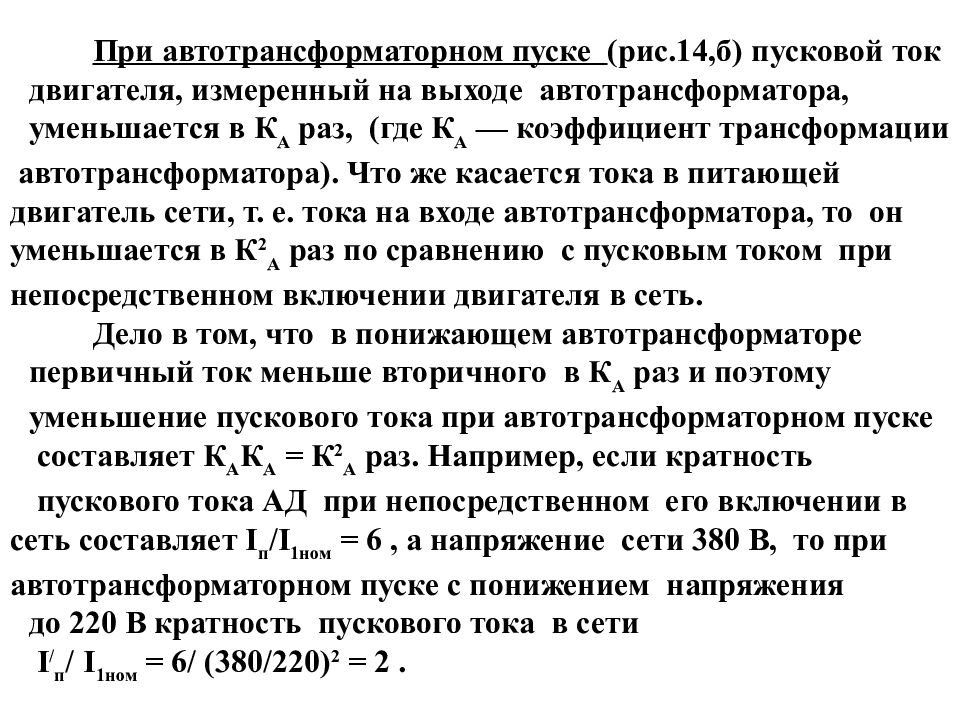
Автотрансформаторный пуск.
Кроме указанных способов можно применить так называемый автотрансформаторный пуск.
Соответствующая схема показана на рис.3.29.
Рис.3.29
Перед пуском переключатель S устанавливается в положение 1, а затем включается автотрансформатор и статор питается пониженным напряжением U1П. Двигатель разгоняется при пониженном напряжении и в конце разгона переключатель S переводится в положение 2 и статор питается номинальным напряжением U1ном.
Если коэффициент трансформации понижающего трансформатора n, тогда ток I на его входе будет в n раз меньше. Кроме того, пусковой ток будет также в n раз меньше, т.е. ток при пуске в сети будет в n2 раз меньше, чем при непосредственном пуске.
Этот способ, хотя и лучше рассмотренных в п.3.14.7, но значительно дороже.
Пуск двигателя с фазным ротором.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора, как это показано на рис.3.30.
Начала фаз обмоток ротора присоединяются к контактным кольцам и через щетки подключаются к пусковому реостату с сопротивлением Rp.
Приведенное к обмотке статора сопротивление пускового реостата Rp рассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП = М Пmaх = МК будет обеспечено. Тогда
.
Пуск двигателя происходит по кривой, показанной на рис.3.31. В момент пуска рабочая точка на механической характеристике находится в положении а, а при разгоне двигателя она перемещается по кривой 1, соответствующей полностью включенному реостату.
При моменте, соответствующем точке е , включается первая ступень реостата и момент скачком увеличивается до точки b – рабочая точка двигателя переходит на кривую 2; в момент времени, соответствующей точке d, выключается вторая ступень реостата, рабочая точка скачком переходит в точку с и двигатель выходит на естественную характеристику 3 и затем в точку f. Реостат закорачивается, обмотка ротора замыкается накоротко, а щетки отводятся от колец.
Таким образом, фазный ротор позволяет пускать в ход асинхронные двигатели большой мощности при ограниченном пусковом токе. Однако этот способ пуска связан со значительными потерями в пусковом реостате.
Кроме того, двигатель с фазным ротором дороже двигателя с короткозамкнутым ротором. Поэтому двигатель с фазным ротором применяется лишь при больших мощностях и высоких требованиях к приводу.
Расчет номинального тока электродвигателя | Заметки электрика
Здравствуйте, уважаемые читатели и гости сайта «Заметки электрика».
Решил написать статью о расчете номинального тока для трехфазного электродвигателя.
Этот вопрос является актуальным и кажется на первый взгляд не таким и сложным, но почему-то в расчетах зачастую возникают ошибки.
В качестве примера для расчета я возьму трехфазный асинхронный двигатель АИР71А4 мощностью 0,55 (кВт).
Вот его внешний вид и бирка с техническими данными.
Если двигатель Вы планируете подключать в трехфазную сеть 380 (В), то значит его обмотки нужно соединить по схеме «звезда», т.е. на клеммнике необходимо соединить выводы V2, U2 и W2 между собой с помощью специальных перемычек.
При подключении этого двигателя в трехфазную сеть напряжением 220 (В) его обмотки необходимо соединить треугольником, т.е. установить три перемычки: U1-W2, V1-U2 и W1-V2.
Если же Вы решите подключить этот двигатель в однофазную сеть 220 (В), то его обмотки также должны быть соединены треугольником.
Для информации: почитайте подробную статью о схемах соединения обмоток в «звезду» и «треугольник».
Для правильного выбора автоматического выключателя (или предохранителей) и тепловых реле для защиты двигателя, а также для выбора контактора для его управления, в первую очередь нам нужно знать номинальный ток двигателя для конкретной схемы соединения обмоток.
Обычно, номинальные токи указаны прямо на бирке, поэтому можно смело ориентироваться на них. Но иногда циферки не видны или стерты, а известна только лишь мощность двигателя или другие его параметры.
Такое очень часто встречается, но еще чаще бирка вообще отсутствует или так затерта, что на ней абсолютно ничего не видно — приходится только догадываться, что там изображено.
Но это отдельный случай и что делать в таких ситуациях, я расскажу Вам в ближайшее время.
В данной же статье я хочу акцентировать Ваше внимание на формулу по расчету тока двигателя, потому что даже не все «специалисты» ее знают, хотя может и знают, но не хотят вспомнить основы электротехники.
Итак, приступим.
Внимание! Мощность на шильдике двигателя указывается не электрическая, а механическая, т.е. полезная механическая мощность на валу двигателя. Об этом отчетливо говорится в действующем ГОСТ Р 52776-2007, п.5.5.3:
Полезную механическую мощность обозначают, как Р2.
Чаще всего мощность двигателя указывают не в ваттах (Вт), а в киловаттах (кВт). Для тех кто забыл, читайте статью о том, как перевести ватты в киловатты и наоборот.
Еще реже, на бирке указывают мощность в лошадиных силах (л.с.), но такого я ни разу еще не встречал на своей практике. Для информации: 1 (л.с.) = 745,7 (Ватт).
Но нас интересует именно электрическая мощность, т.е. мощность, потребляемая двигателем из сети. Активная электрическая мощность обозначается, как Р1 и она всегда будет больше механической мощности Р2, т.к. в ней учтены все потери двигателя.
1. Механические потери (Рмех.)
К механическим потерям относятся трение в подшипниках и вентиляция. Их величина напрямую зависит от оборотов двигателя, т.е. чем выше скорость, тем больше механические потери.
У асинхронных трехфазных двигателей с фазным ротором еще учитываются потери между щетками и контактными кольцами. Более подробно об устройстве асинхронных двигателей Вы можете почитать здесь.
2. Магнитные потери (Рмагн.)
Магнитные потери возникают в «железе» магнитопровода. К ним относятся потери на гистерезис и вихревые токи при перемагничивании сердечника.
Величина магнитных потерь в статоре зависит от частоты перемагничивания его сердечника. Частота всегда постоянная и составляет 50 (Гц).
Магнитные потери в роторе зависят от частоты перемагничивания ротора. Эта частота составляет 2-4 (Гц) и напрямую зависит от величины скольжения двигателя. Но магнитные потери в роторе имеют малую величину, поэтому в расчетах чаще всего не учитываются.
3. Электрические потери в статорной обмотке (Рэ1)
Электрические потери в обмотке статора вызваны их нагревом от проходящих по ним токам. Чем больше ток, чем больше нагружен двигатель, тем больше электрические потери — все логично.
4. Электрические потери в роторе (Рэ2)
Электрические потери в роторе аналогичны потерям в статорной обмотке.
5. Прочие добавочные потери (Рдоб.)
К добавочным потерям можно отнести высшие гармоники магнитодвижущей силы, пульсацию магнитной индукции в зубцах и прочее. Эти потери очень трудно учесть, поэтому их принимают обычно, как 0,5% от потребляемой активной мощности Р1.
Все Вы знаете, что в двигателе электрическая энергия преобразуется в механическую. Если объяснить чуть подробнее, то при подведенной к двигателю электрической активной мощности Р1, некоторая ее часть затрачивается на электрические потери в обмотке статора и магнитные потери в магнитопроводе. Затем остаточная электромагнитная мощность передается на ротор, где она расходуется на электрические потери в роторе и преобразуется в механическую мощность. Часть механической мощности уменьшается за счет механических и добавочных потерь. В итоге, оставшаяся механическая мощность — это и есть полезная мощность Р2 на валу двигателя.
Все эти потери и заложены в единственный параметр — коэффициент полезного действия (КПД) двигателя, который обозначается символом «η» и определяется по формуле:
η = Р2/Р1
Кстати, КПД примерно равен 0,75-0,88 для двигателей мощностью до 10 (кВт) и 0,9-0,94 для двигателей свыше 10 (кВт).
Еще раз обратимся к данным, рассматриваемого в этой статье двигателя АИР71А4.
На его шильдике указаны следующие данные:
- тип двигателя АИР71А4
- заводской номер № ХХХХХ
- род тока — переменный
- количество фаз — трехфазный
- частота питающей сети 50 (Гц)
- схема соединения обмоток ∆/Y
- номинальное напряжение 220/380 (В)
- номинальный ток при треугольнике 2,7 (А) / при звезде 1,6 (А)
- номинальная полезная мощность на валу Р2 = 0,55 (кВт) = 550 (Вт)
- частота вращения 1360 (об/мин)
- КПД 75% (η = 0,75)
- коэффициент мощности cosφ = 0,71
- режим работы S1
- класс изоляции F
- класс защиты IP54
- название предприятия и страны изготовителя
- год выпуска 2007
Расчет номинального тока электродвигателя
В первую очередь необходимо найти электрическую активную потребляемую мощность Р1 из сети по формуле:
Р1 = Р2/η = 550/0,75 = 733,33 (Вт)
Величины мощностей подставляются в формулы в ваттах, а напряжение — в вольтах. КПД (η) и коэффициент мощности (cosφ) — являются безразмерными величинами.
Но этого не достаточно, потому что мы не учли коэффициент мощности (cosφ), а ведь двигатель — это активно-индуктивная нагрузка, поэтому для определения полной потребляемой мощности двигателя из сети воспользуемся формулой:
S = P1/cosφ = 733,33/0,71 = 1032,85 (ВА)
Найдем номинальный ток двигателя при соединении обмоток в звезду:
Iном = S/(1,73·U) = 1032,85/(1,73·380) = 1,57 (А)
Найдем номинальный ток двигателя при соединении обмоток в треугольник:
Iном = S/(1,73·U) = 1032,85/(1,73·220) = 2,71 (А)
Как видите, получившиеся значения равны токам, указанным на бирке двигателя.
Для упрощения, выше приведенные формулы можно объединить в одну общую. В итоге получится:
Iном = P2/(1,73·U·cosφ·η)
Поэтому, чтобы определить номинальный ток двигателя, необходимо в данную формулу подставлять механическую мощность Р2, взятую с бирки, с учетом КПД и коэффициента мощности (cosφ), которые указаны на той же бирке или в паспорте на электродвигатель.
Перепроверим формулу.
Ток двигателя при соединении обмоток в звезду:
Iном = P2/(1,73·U·cosφ·η) = 550/(1,73·380·0,71·0,75) = 1,57 (А)
Ток двигателя при соединении обмоток в треугольник:
Iном = P2/(1,73·U·cosφ·η) = 550/(1,73·220·0,71·0,75) = 2,71 (А)
Надеюсь, что все понятно.
Примеры
Решил привести еще несколько примеров с разными типами двигателей и мощностями. Рассчитаем их номинальные токи и сравним с токами, указанными на их бирках.
1. Асинхронный двигатель 2АИ80А2ПА мощностью 1,5 (кВт)
Как видите, этот двигатель можно подключить только в трехфазную сеть напряжением 380 (В), т.к. его обмотки собраны в звезду внутри двигателя, а в клеммник выведено всего три конца, поэтому:
Iном = P2/(1,73·U·cosφ·η) = 1500/(1,73·380·0,85·0,82) = 3,27 (А)
Полученный ток 3,27 (А) соответствует номинальному току 3,26 (А), указанному на бирке.
2. Асинхронный двигатель АОЛ2-32-4 мощностью 3 (кВт)
Данный двигатель можно подключать в трехфазную сеть напряжением, как на 380 (В) звездой, так и на 220 (В) треугольником, т.к. в клеммник у него выведено 6 концов:
Iном = P2/(1,73·U·cosφ·η) = 3000/(1,73·380·0,83·0,83) = 6,62 (А) — звезда
Iном = P2/(1,73·U·cosφ·η) = 3000/(1,73·220·0,83·0,83) = 11,44 (А) — треугольник
Полученные значения токов при разных схемах соединения обмоток соответствуют номинальным токам, указанных на бирке.
3. Асинхронный двигатель АИРС100А4 мощностью 4,25 (кВт)
Аналогично, предыдущему.
Iном = P2/(1,73·U·cosφ·η) = 4250/(1,73·380·0,78·0,82) = 10,1 (А) — звезда
Iном = P2/(1,73·U·cosφ·η) = 4250/(1,73·220·0,78·0,82) = 17,45 (А) — треугольник
Расчетные значения токов при разных схемах соединения обмоток соответствуют номинальным токам, указанных на шильдике двигателя.
4. Высоковольтный двигатель А4-450Х-6У3 мощностью 630 (кВт)
Этот двигатель можно подключить только в трехфазную сеть напряжением 6 (кВ). Схема соединения его обмоток — звезда.
Iном = P2/(1,73·U·cosφ·η) = 630000/(1,73·6000·0,86·0,947) = 74,52 (А)
Расчетный ток 74,52 (А) соответствует номинальному току 74,5 (А), указанному на бирке.
Дополнение
Представленные выше формулы это конечно хорошо и по ним расчет получается более точным, но есть в простонародье более упрощенная и приблизительная формула для расчета номинального тока двигателя, которая наибольшее распространение получила среди домашних умельцев и мастеров.
Все просто. Берете мощность двигателя в киловаттах, указанную на бирке и умножаете ее на 2 — вот Вам и готовый результат. Только данное тождество уместно для двигателей 380 (В), собранных в звезду. Можете проверить и поумножать мощности приведенных выше двигателей. Но лично я же настаиваю Вам использовать более точные методы расчета.
P.S. А вот теперь, как мы уже определились с токами, можно приступать к выбору автоматического выключателя, предохранителей, тепловой защиты двигателя и контакторов для его управления. Об этом я расскажу Вам в следующих своих публикациях. Чтобы не пропустить выход новых статей — подписывайтесь на рассылку сайта «Заметки электрика». До новых встреч.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Выбор электродвигателя и расчет его рабочих параметров
Правильность подбора электродвигателя, учитывающая специфику приводного механизма, условия работы и окружающей среды, определяет длительность безаварийной работы и надежность системы «двигатель – нагрузка».
Далее приведены рекомендации по выбору электродвигателя (последовательность, в которой они представлены, не является обязательной).
На первом этапе необходимо определиться с типом электрического двигателя. Ниже даны краткое описание, преимущества и недостатки, сферы предпочтительного применения основных типов двигателей.
Типы электрических двигателей- Двигатели постоянного тока
Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором.
Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
- Синхронные двигатели
Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ=1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска. Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт.
Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки.
- Асинхронные двигатели
По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты.
В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности.
Мощность и моментыВ общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
- Вентилятор
где Q [м3/с] – производительность вентилятора,
Н [Па] – давление на выходе вентилятора,
ηвент, ηпер – КПД вентилятора и передаточного механизма соответственно,
kз – коэффициент запаса.
- Насос
где Q [м3/с] – производительность насоса,
g=9,8 м/с2 – ускорение свободного падения,
H [м] – расчетная высота подъема,
ρ [кг/м3] – плотность перекачиваемой жидкости,
ηнас, ηпер – КПД насоса и передаточного механизма соответственно,
kз – коэффициент запаса.
- Поршневой компрессор
где Q [м3/с] – производительность компрессора,
А [Дж/м3] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м3 давлением 1,1·105 Па до требуемого давления,
ηкомпр, ηпер – КПД компрессора и передаточного механизма соответственно,
kз – коэффициент запаса.
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением
Полная мощность, потребляемая из сети:
для двигателей постоянного тока (она же активная)
для двигателей переменного тока
при этом потребляемые активная и реактивная мощности соответственно
В случае синхронного двигателя значение Q1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть.
Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Напряжение и ток
При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди.
Если при трогании момент сопротивления нагрузки невелик и для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть применен способ пуска с переключением со «звезды» на «треугольник», необходимо предусмотреть вывод в клеммную коробку всех шести зажимов обмотки статора. В общем случае применение схемы соединения «звезда» является предпочтительным, так как в схеме «треугольник» имеется контур для протекания токов нулевой последовательности, которые приводят к нагреву обмотки и снижению КПД двигателя, в соединении «звезда» такой контур отсутствует.
Режим работы
Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы.
- Продолжительный S1 – режим работы при постоянной нагрузке в течение времени, за которое температура двигателя достигает установившегося значения. Мощность двигателя, работающего в данном режиме, рассчитывается исходя из потребляемой механизмом мощности. Формулы расчета мощности некоторых механизмов (насос, вентилятор, компрессор) приведены выше.
- Кратковременный S2 – режим, при котором за время включения на постоянную нагрузку температура двигателя не успевает достичь установившегося значения, а за время отключения двигатель охлаждается до температуры окружающей среды. В случае использования двигателя S1 для работы в режиме S2 необходимо проверить его только по перегрузочной способности, так как температура не успевает достичь допустимого значения.
- Повторно-кратковременный S3 – режим с периодическим отключением двигателя, при котором за время включения температура не успевает достичь установившегося значения, а за время отключения – температуры окружающей среды. Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
- Повторно-кратковременный с частыми пусками S4 и повторно-кратковременный с частыми пусками и электрическим торможением S5. Данные режимы рассматриваются аналогично режиму S3.
- Перемежающийся S6 – режим, при котором работа двигателя под нагрузкой, периодически заменяется работой на холостом ходу. Большинство двигателей, работающих в продолжительном режиме, имеют меняющийся график нагрузки.
При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин.
Класс энергоэффективностиВ настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия
где Р2 – полезная мощность на валу, Р1 – потребляемая активная мощность из сети.
Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3.
Рис. 1. Классы энергоэффективности
Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя.
Степень защиты IP, виды климатических условий и категорий размещенияГОСТ Р МЭК 60034-5 – 2007 устанавливает классификацию степеней защиты, обеспечиваемых оболочками машин.
Обозначение степени защиты состоит из букв латинского алфавита IP и последующих двух цифр (например, IP55).
Большинство электродвигателей, выпускаемых в настоящее время, имеют степени защиты IP54 и IP55.
Категория размещения обозначается цифрой:
1 – на открытом воздухе;
2 – под навесом при отсутствии прямого солнечного воздействия и атмосферных осадков;
3 – в закрытых помещениях без искусственного регулирования климатических условий;
4 – в закрытых помещениях с искусственно регулируемыми климатическими условиями.
Климатические условия:
У – умеренный климат;
УХЛ – умеренно холодный климат;
ХЛ – холодный климат;
Т – тропический климат.
Таким образом, при выборе электродвигателя необходимо учитывать условия окружающей среды (температура, влажность), а также необходимость защиты двигателя от воздействия инородных предметов и воды.
Например, использование электродвигателя с типом климатического исполнения и категорией размещения У3 на открытом воздухе является недопустимым.
Усилия, действующие на вал двигателя со стороны нагрузки
Наиболее нагруженными в двигателе являются подшипниковые узлы. Поэтому при выборе двигателя должны быть учтены радиальные и осевые усилия, действующие на рабочий конец вала двигателя со стороны нагрузки. Превышения допустимых значений сил приводит к ускоренному выходу из строя не только подшипников, но и всего двигателя (например, задевание ротора о статор).
Обычно допустимые значения сил для каждого подшипника приведены в каталогах. Рекомендуется в случае повышенных радиальных усилий (ременная передача) на рабочий конец вала установить роликовый подшипник, при этом предпочтительным является двигатель с чугунными подшипниковыми щитами.
Особенности конструкции двигателя при работе от преобразователя частоты
В настоящее время все большее распространение приобретает использование частотно-регулируемого привода (ЧРП), выполненного на основе асинхронного электродвигателя с короткозамкнутым ротором.
При использовании частотно-регулируемого привода достигается:
1. экономия электроэнергии;
2. плавность пуска и снижение пусковых токов;
3. увеличение срока службы двигателя.
В общем случае стандартный электродвигатель нельзя использовать в составе частотно-регулируемого привода, так как при уменьшении скорости вращения снижается эффективность охлаждения. При регулировании скорости вверх от номинальной резко увеличивается нагрузка от собственного вентилятора. В обоих случаях уменьшается нагрузочная способность двигателя. Кроме того, в случае использования двигателя в системах точного регулирования необходим датчик положения ротора двигателя.
При работе электродвигателя от преобразователя частоты в контуре вал – фундаментная плита могут протекать токи. При этом возникает точечная эрозия на шариках и роликах, на беговых кольцах подшипников качения, а также на баббитовой поверхности подшипников скольжения. От электролиза смазка чернеет, подшипники греются. Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима.
Величина подшипниковых токов становится опасной для безаварийной работы двигателя при напряжении между противоположными концами вала более 0,5 В. Поэтому установка изолированного подшипника обычно требуется для электродвигателей с высотой оси вращения более 280 мм.
Примечание
Необходимо отметить, что в случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки, а, следовательно, и фазное напряжение.
Популярные товары
Шины медные плетеные
Шины изолированные гибкие и твердые
Шинодержатели
Изоляторы
Индикаторы наличия напряжения
Номинальный ток электродвигателя
Подавляющее большинство электродвигателей, используемых в промышленности, относятся к трехфазному асинхронному типу. Для питания таких устройств необходима промышленная трехфазная сеть переменного тока, обеспечивающая сетевое напряжение заданной частоты и напряжения. Высокая популярность асинхронных электродвигателей обусловлена дешевизной, простотой изготовления и механической прочностью данных устройств. Кроме того, изменяя схему подключения обмоток (звезда или треугольник) можно подключать двигатель к сетям различного напряжения (обычно используются комбинации 220/380 и 127/220В).
Высокий стартовый ток – главный недостаток асинхронного электродвигателя
Однако несмотря на множество неоспоримых преимуществ, асинхронные двигатели имеют минусы, среди которых одним из наиболее значительных является достаточно большой пусковой ток электродвигателя данного типа. Особенно заметен этот недостаток в асинхронных устройствах с короткозамкнутым ротором. Такие двигатели следует с осторожностью применять, в тех системах, для которых требуется значительный пусковой момент, который может привести к превышению номинального значения силы тока (Iн).
Для большинства асинхронных электродвигателей допустимо кратковременное превышение значение Iн, которое может произойти в момент пуска. Так, в момент запуска, допускается шестикратное превышение значения номинального тока при условии, что оно будет длиться не более 5 секунд. В случае, если в некотором режиме номинальный ток превышается не более чем в два раза, допускается увеличить время работы устройства в этом режиме до 15 секунд.
Расчет номинального значения тока асинхронного электродвигателя
Номинальный ток электродвигателя, при котором возможна его длительная работа, связан с номинальной мощностью устройства и его КПД следующим выражением: Iн=1000*Pн/(Uн*cosφ√η), где Рн – мощность, Uн – номинальное напряжение, которым питается электродвигатель, η – КПД, а cosφ – коэффициент мощности двигателя.
Отсюда можно сделать важный вывод, который состоит в том, что при уменьшении U (например при переключении устройства из сети в 220 В сеть 127 В), увеличивается ток двигателя, который может превысить номинальное значение. А длительная работа двигателя на токе I>Iн может привести не только к его повреждению, но и к возгоранию. Поэтому, используемые в системе с электрическим двигателем предохранительные устройства должны быть подобраны так, чтобы предотвратить продолжительную работу при токе I>Iн.
Просмотров: 16708
Дата: Воскресенье, 15 Декабрь 2013
формул асинхронного двигателя с расчетами
Электродвигатели — это машины, которые преобразуют входную электрическую энергию в механическую энергию. Все двигатели состоят из статора (неподвижная часть) и ротора (вращающаяся часть). Поскольку двигатель работает от электричества, с его работой связаны различные свойства. К таким свойствам относятся количество полюсов, скорость, частота, скольжение, пусковой ток и номинальная мощность в лошадиных силах. Ранее мы публиковали книгу по двигателям переменного тока, в которой кратко объясняются все эти свойства, этот пост посвящен формулам асинхронных двигателей и примерам расчетов.
Синхронная скорость, частота и полюса
Синхронная скорость, частота и количество полюсов асинхронного двигателя связаны формулой:
η синхронизация = (120 * f e ) / P
η синхрон = синхронная скорость
f e = частота системы
P = количество полюсов, установленных в машине
Расчет: Найдите синхронную скорость 4-полюсного асинхронного двигателя, который работает с частотой 60 Гц.
Решение: η синхр. = 120 * 60/4 = 1800 об / мин
Мотор скольжения
Пробуксовку двигателя можно найти по формуле:
с = (η синхр. -η м ) / η синхр. * 100
η синхронизация = Скорость магнитного поля
η м = Механическая частота вращения вала
Расчет: Скорость ротора 4-полюсного асинхронного двигателя при 50 Гц составляет 1200 об / мин. Рассчитайте его скольжение.
Решение: Скорость ротора = η м = 1200 об / мин
Где η синхрон = 120 * 50/4 = 1500 об / мин
с = (1500 — 1200) / 1500 * 100 = 20
Крутящий момент, мощность и скорость
τ инд = P / ω м
τ ind = индуцированный крутящий момент в Нм
P = мощность в кВт
ω м = Скорость в об / мин
Расчет: Найдите крутящий момент на валу асинхронного двигателя мощностью 10 л.с., скорость ротора которого составляет 1500 об / мин.
Решение: τ ind = (10 л.с. * 746 кВт / л.с.) / (1500 об / мин * 2 π рад / об * 1 мин / 60 с) = 47,49 Нм
Калькулятор пускового тока
I L = S начало / (√3 * V T ),
, где S start = Номинальная мощность двигателя * Кодовый коэффициент
(Кодовый коэффициент — это число, которое зарезервировано для класса) Например, все двигатели класса A имеют фиксированный кодовый коэффициент, который в приведенном выше уравнении следует умножить на номинальную мощность.)
В T = Номинальное напряжение
Расчет: Найдите пусковой ток 10 л.с., трехфазный двигатель 220 В класса А.
Решение: Максимальное значение кВА / л.с. для двигателя класса A составляет 3,15 (кодовый коэффициент).
S start = 10 л.с. * 3,15 = 31,5 кВА
I L = 31,5 кВА / (√3 * 220) = 82,66 А
Возможно, вы захотите узнать: Как рассчитать ток от HP
| Формулы и расчеты, приведенные ниже, следует использовать только для оценки.Заказчик обязан указать требуемые мощность двигателя, крутящий момент и время разгона для своего приложения. Продавец может пожелать проверить указанные заказчиком значения с помощью формул в этом разделе, однако, если есть серьезные сомнения относительно приложения заказчика или если заказчик требует гарантированной производительности двигателя / приложения, заказчик должен нанять инженера-электрика для точного определения расчеты. Чтобы получить подробное описание каждой формулы, щелкните ссылки ниже, чтобы перейти к ней. Практические правила (приближение)Механические формулы
преобразование температурыградус C = (градус F — 32) x 5/9градус F = (градус C x 9/5) + 32
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
