Как устроен и работает асинхронный двигатель. Каковы основные режимы работы асинхронного двигателя. Какие характеристики определяют работу асинхронного двигателя. Как происходит пуск асинхронного двигателя. Каковы преимущества и недостатки асинхронных двигателей.
Конструкция асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей:
- Статор — неподвижная часть двигателя
- Ротор — вращающаяся часть двигателя
Статор представляет собой полый цилиндр, собранный из тонких электротехнических стальных пластин. На внутренней поверхности статора располагаются пазы, в которые укладывается трехфазная обмотка.
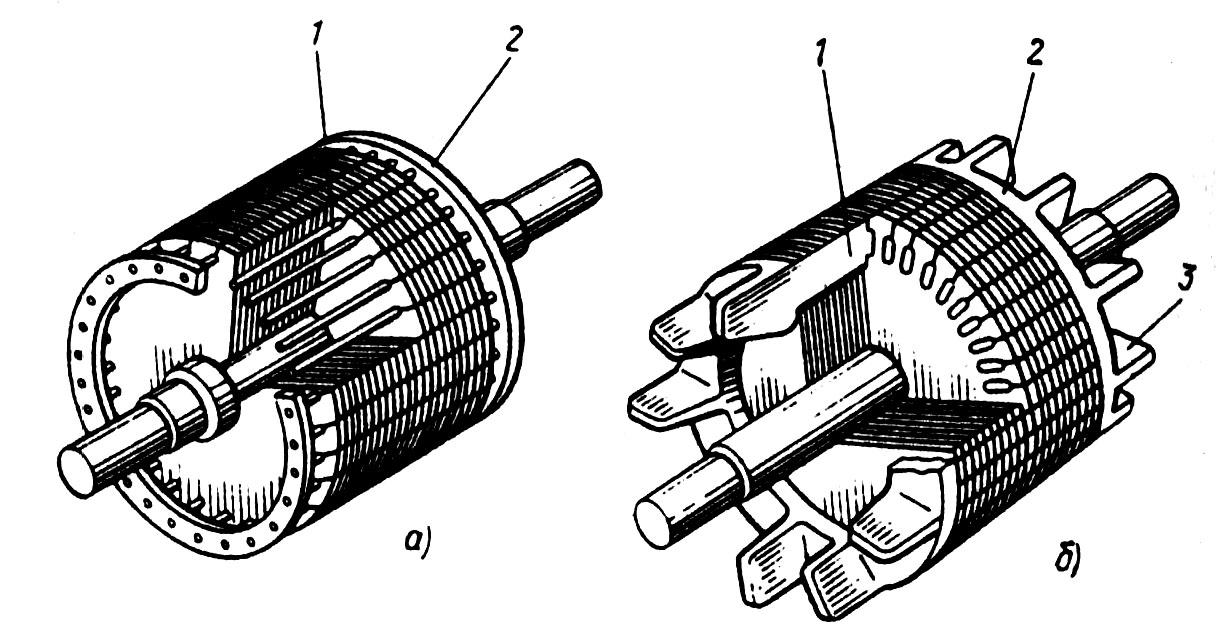
Ротор размещается внутри статора с небольшим воздушным зазором. Он также набран из стальных пластин и имеет обмотку. Существует два основных типа роторов:
- Короткозамкнутый ротор — обмотка выполнена в виде «беличьей клетки»
- Фазный ротор — имеет трехфазную обмотку, выведенную на контактные кольца
Принцип действия асинхронного двигателя
Принцип работы асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с токами, индуцированными этим полем в обмотке ротора.

Основные этапы работы:
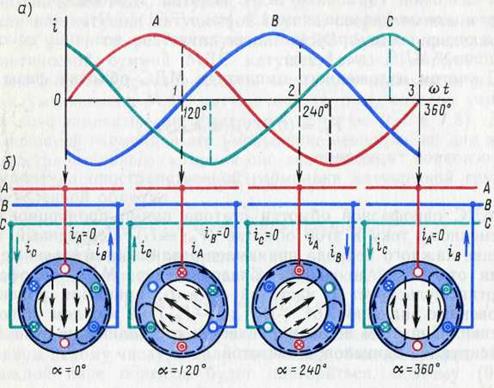
- При подключении обмотки статора к трехфазной сети создается вращающееся магнитное поле
- Магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС
- По обмотке ротора начинает протекать ток
- Взаимодействие тока ротора с магнитным полем статора создает электромагнитный момент
- Под действием момента ротор начинает вращаться вслед за полем статора
Скорость вращения ротора всегда меньше скорости вращения магнитного поля — отсюда название «асинхронный».
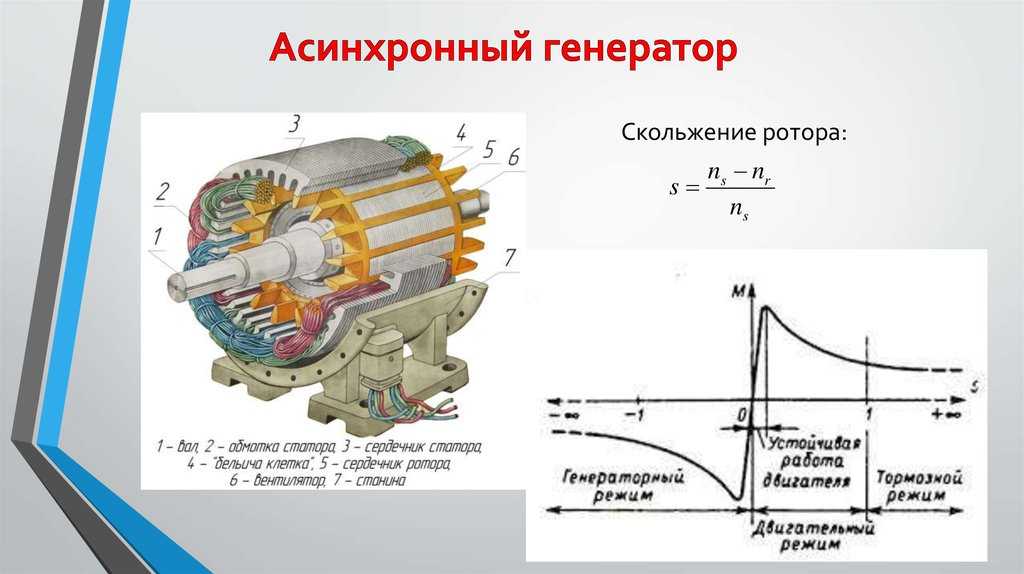
Скольжение асинхронного двигателя
Скольжение — это относительная разность между скоростью вращения магнитного поля статора и ротора. Определяется по формуле:
s = (n1 — n) / n1
где:
- s — скольжение
- n1 — синхронная скорость вращения поля статора
- n — скорость вращения ротора
Скольжение выражается в долях или процентах. Для номинального режима работы двигателя скольжение обычно составляет 2-7%.
Режимы работы асинхронного двигателя
В зависимости от величины скольжения различают следующие режимы работы асинхронной машины:

- Двигательный режим (0 < s < 1)
- Генераторный режим (s < 0)
- Режим электромагнитного тормоза (s > 1)
Наиболее распространен двигательный режим, когда машина преобразует электрическую энергию в механическую.
Характеристики асинхронного двигателя
Основными рабочими характеристиками асинхронного двигателя являются:
- Механическая характеристика — зависимость момента от скольжения M = f(s)
- Электромеханическая характеристика — зависимость тока от скольжения I = f(s)
- Рабочие характеристики — зависимости P2, I1, cosφ, η, s = f(P2)
Механическая характеристика имеет критическую точку, соответствующую максимальному моменту двигателя. Перегрузочная способность определяется как отношение максимального момента к номинальному.
Пуск асинхронного двигателя
Пусковой режим характеризуется большими токами и малым пусковым моментом. Для улучшения пусковых характеристик применяют следующие способы пуска:
- Прямой пуск — для двигателей малой мощности
- Пуск с переключением обмоток со звезды на треугольник
- Пуск через автотрансформатор
- Частотный пуск
- Реостатный пуск (для двигателей с фазным ротором)
Выбор способа пуска зависит от мощности двигателя и особенностей приводимого механизма.

Регулирование частоты вращения
Существует несколько способов регулирования скорости вращения асинхронного двигателя:
- Изменение числа пар полюсов — ступенчатое регулирование
- Изменение частоты питающего напряжения — плавное регулирование
- Изменение напряжения питания — для двигателей с фазным ротором
- Введение добавочного сопротивления в цепь ротора
Наиболее эффективным является частотное регулирование с помощью преобразователей частоты.
Преимущества и недостатки асинхронных двигателей
Основные преимущества асинхронных двигателей:
- Простота конструкции и надежность
- Низкая стоимость
- Высокий КПД и коэффициент мощности
- Возможность прямого подключения к сети
Недостатки:
- Сложность регулирования скорости
- Небольшая перегрузочная способность
- Большой пусковой ток
Несмотря на недостатки, простота и надежность обеспечили асинхронным двигателям широкое применение в промышленности.
Применение асинхронных двигателей
Асинхронные двигатели нашли применение в самых разных отраслях промышленности и бытовой технике:
- Станки и производственное оборудование
- Насосы, вентиляторы, компрессоры
- Подъемно-транспортные механизмы
- Бытовая техника (стиральные машины, холодильники)
- Электроинструмент
- Электротранспорт
Широкое распространение асинхронных двигателей обусловлено их простотой, надежностью и низкой стоимостью при достаточно высоких энергетических показателях.
Энергоэффективность асинхронных двигателей
Повышение энергоэффективности асинхронных двигателей — одна из важнейших задач современной электротехники. Основные способы повышения КПД:
- Применение высококачественных электротехнических сталей
- Оптимизация конструкции магнитопровода
- Использование медных роторных обмоток
- Снижение потерь в подшипниковых узлах
- Применение частотно-регулируемого электропривода
Современные энергоэффективные асинхронные двигатели имеют КПД до 95-96%, что позволяет существенно снизить энергопотребление.
Диагностика и обслуживание асинхронных двигателей
Для обеспечения надежной работы асинхронных двигателей необходимо проводить их регулярное техническое обслуживание и диагностику:
- Периодический осмотр и очистка
- Контроль состояния подшипников
- Измерение сопротивления изоляции обмоток
- Проверка крепления двигателя и соединительных муфт
- Вибродиагностика
- Тепловизионный контроль
Своевременное обнаружение и устранение неисправностей позволяет избежать аварийных ситуаций и продлить срок службы двигателя.
§78. Режимы работы асинхронных двигателей
Холостой ход.
Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток.
Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры.
Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
Нагрузочный режим.
Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается.
Но одновременно увеличивается частота n1— n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М. Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом М вн.
При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента Мвн частота вращения ротора по той же причине будет увеличиваться. Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n
f2/f1 = (n1— n)/n1= s или f2 = f1s (83)
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cosφ1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260).
260).
Рис. 260. Энергетическая диаграмма асинхронного двигателя
В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ΔРэл1 и ротора ΔРэл2, магнитные ΔРм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ΔРмх от трения в подшипниках и вращающихся частей о воздух.
Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора.
Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I2, индуцируемым им в проводниках обмотки статора. Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cosφ2 (здесь φ2 — угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора).
Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cosφ2 (здесь φ2 — угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора).
Поэтому
M = cмФтI2 cosφ2 (84)
где
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников.
Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором.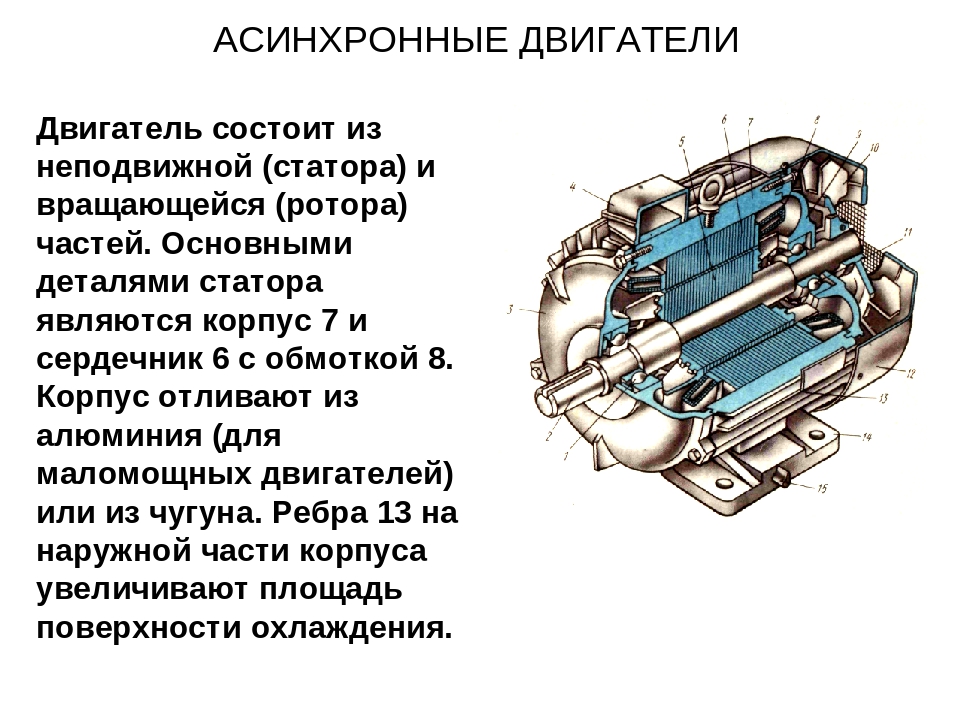 Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем.
Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем.
Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — φ2, приложены силы f, увлекающие ротор за вращающимся магнитным полем, а на дуге φ2 — тормозящие силы. Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол φ2. Электромагнитный момент М зависит от скольжения s.
Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cosφ2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cosφ2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
При s < 10-20% увеличение скольжения приводит к незначительному уменьшению cos φ2, вследствие чего активная составляющая тока в обмотке ротора I2cos φ2 и электромагнитный момент М возрастают.
При некотором критическом скольжении sкр двигатель развивает наибольший момент Мmax, который определяет его перегрузочную способность. При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos φ2 и электромагнитный момент М уменьшаются.
Номинальный вращающий момент Мном двигатели средней и большой мощности развивают при скольжении Sном = 2-4%.
Согласно государственным стандартам на асинхронные двигатели отношение Mmax/Mном = 1,8-2,5. Критическое скольжение sкр для мощных двигателей составляет 5—10%, для двигателей средней и малой мощности — от 10 до 20 %.
Асинхронный двигатель, как и любая электрическая машина, может работать в генераторном режиме, создавая тормозной момент. Этот режим используется для электрического торможения приводов.
Режим пуска.
В начальный момент пуска ротор двигателя неподвижен: скольжение s=1, магнитное поле пересекает ротор с максимальной частотой, индуцируя в нем наибольшую э. д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре.
Обычно пусковой ток двигателя в 5—7 раз больше номинального. Вращающий момент Мп при пуске называется пусковым. Он обычно меньше наибольшего момента, который может развить двигатель.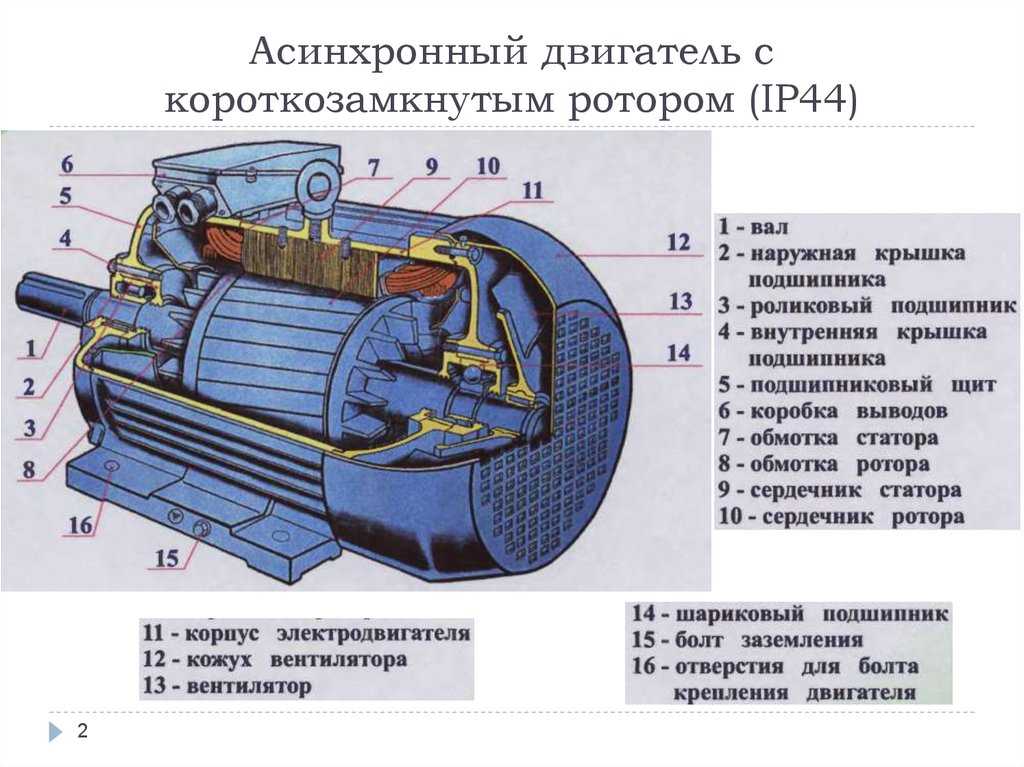 Для двигателей различных типов и мощностей отношение Мп/Мном = 0,7 – 1,8.
Для двигателей различных типов и мощностей отношение Мп/Мном = 0,7 – 1,8.
Принцип работы асинхронного двигателя | Эксплуатация электрических машин и аппаратуры | Архивы
- 6кВ
- 0,4кВ
- трансформатор
- эксплуатация
- подстанция
- 10кВ
- заземление
Содержание материала
- Эксплуатация электрических машин и аппаратуры
- Волокнистые, стеклянные и асбестовые материалы, бумага
- Проводниковые материалы
- Сведения об электрических машинах переменного тока
- Однослойные трехфазные обмотки машин переменного тока
- Трехфазные двухслойные обмотки машин переменного тока
- Обмотки однофазных машин переменного тока
- Асинхронные двигатели
- Принцип работы асинхронного двигателя
- Пуск трехфазных асинхронных двигателей
- Регулировка скорости вращения асинхронных двигателей
- Однофазные асинхронные двигатели
- Синхронные машины
- Принцип работы синхронного генератора
- Характеристики синхронных генераторов
- Синхронные двигатели
- Трансформаторы
- Работа трансформаторов
- Трехфазные трансформаторы
- Специальные трансформаторы
- Другие специальные трансформаторы
- Машины постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Сварочные генераторы
- Рубильники и пакетные выключатели
- Контакторы и магнитные пускатели
- Реостаты
- Предохранители
- Работа трехфазных асинхронных двигателей в однофазных сетях
- Изменение скорости вращения ротора асинхронного двигателя
- Особые режимы работы трехфазного асинхронного двигателя
- Параллельная работа трансформаторов
- Параллельная работа синхронных генераторов
- Система технического обслуживания электрооборудования
- Условия эксплуатации и выбор электрооборудования
- Хранение, транспортировка и монтаж электрооборудования
- Техническое обслуживание асинхронных двигателей
- Проверка сети при пуске асинхронных двигателей
- Эксплуатационные характеристики асинхронного двигателя
- Дефектовка собранного асинхронного двигателя
- Техническое обслуживание генераторов
- Техническое обслуживание трансформаторов
- Аварийные перегрузки, короткие замыкания, несимметричные режимы трансформаторов
- Эксплуатация масла, влагообмен в трансформаторах
- Текущий ремонт трансформаторов
- Техническое обслуживание сварочного электрооборудования
- Устранение неисправностей сварочного оборудования
- Неисправности трехфазных асинхронных двигателей
- Различные неисправности трехфазных асинхронных двигателей
- Неисправности машин постоянного тока
- Неисправности трансформаторов
- Неисправности сварочных аппаратов
- Неисправности реакторов, пускателей и контакторов
- Сушка электромашин
- Сушка обмоток силовых трансформаторов
- Определение качества трансформаторного масла
- Маркировка выводных концов электромашин и трансформаторов
- Опытное определение группы трансформатора
- Определение паспорта электромашин и трансформаторов
- Механические неисправности электромашин
- Неисправности коллекторов
- Неисправности обмоток электромашин
- Повреждения обмоток электромашин
- Неисправности силовых трансформаторов
- Мастерская электрика
- Приборы, испытательные щиты, приспособлении и инструмент
- Технологическая планировка мастерской
- Техника безопасности, поражение током
- Помещения и электрооборудование по признаку электробезопасности
- Заземление электроустановок
- Ответственность за безопасность при обслуживании и ремонте электроустановок
- Эксплуатация электроустановок
- Некоторые случаи травматизма
Страница 9 из 74
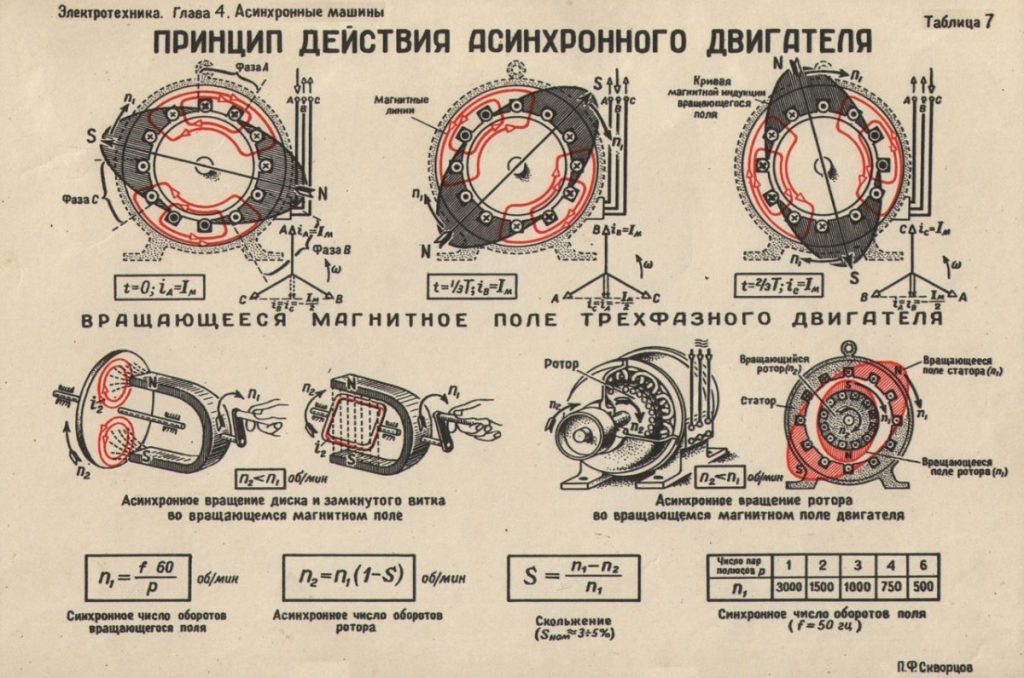
Работа асинхронного двигателя основана на явлении взаимодействия индуктированного тока ротора с магнитным полем статора (рис. 26).
26).
При включении трехфазного двигателя в сеть по его фазам протекают токи, образующие вращающееся магнитное поле, скорость вращения которого равна:
Вращающийся магнитный поток пересекает обмотку ротора и в ней индуктируется э. д. с., направление которой определяется по правилу правой руки. Направления индуктированных э д. с. ротора (рис. 26) отмечены знаком плюс и точкой. В замкнутой обмотке ротора под действием э. д. с. возникают токи такого же направления.
На каждый проводник с током в магнитном поле действует сила, направление которой определяется по правилу левой руки. Под действием сил Fпр (рис. 26) возникает момент М двигателя, ротор разворачивается в направлении вращения магнитного поля со скоростью п, меньшей скорости поля п1. Скорость ротора асинхронного двигателя в принципе не может достичь синхронной скорости. Если допустить, что скорость ротора и магнитного поля равны, то в таком случае обмотка ротора не будет пересекаться магнитным полем, поэтому не возникнет э. д. с., ток ротора и момент двигателя будут равны нулю Ротор уменьшит свою скорость, его обмотка будет пересекаться магнитным полем и вновь возникнет момент двигателя.
д. с., ток ротора и момент двигателя будут равны нулю Ротор уменьшит свою скорость, его обмотка будет пересекаться магнитным полем и вновь возникнет момент двигателя.
Рис. 26. Модель асинхронного двигателя.
Скорость ротора асинхронной машины называют асинхронной скоростью, то есть скорость, неравная синхронной скорости поля, Если скорость ротора п, то роторная обмотка пересекается магнитным полем со скоростью (п1 — п). Отношение скорости пересечения ротора магнитным полем к синхронной скорости называется скольжением машины:
или в процентах
В зависимости от величины и знака скольжения различают три режима работы асинхронной машины: двигательный, генераторный и режим электромагнитного тормоза.
В двигательном режиме направления скорости вращения ротора и магнитного поля совпадают, но скорость ротора меньше поля. Поэтому скольжение положительное и меньше единицы. Двигательный режим асинхронной машины схватывает диапазон скольжения от 1 до 0. В первый момент включения двигателя в сеть ротор неподвижен (п = 0), чему будет соответствовать скольжение S=1. При скорости ротора, равной синхронной (что соответствует синхронному ходу асинхронной машины), скольжение равно нулю. Номинальное скольжение для разных асинхронных двигателей различно, порядок поминального скольжения равен 0,01—0,07 (1—7%).
При скорости ротора, равной синхронной (что соответствует синхронному ходу асинхронной машины), скольжение равно нулю. Номинальное скольжение для разных асинхронных двигателей различно, порядок поминального скольжения равен 0,01—0,07 (1—7%).
Скорость вращения ротора двигателя через скольжение выразим формулой:
где скольжение 5 в долях, а не в процентах.
По номинальной скорости двигателя пп, указанной на его щитке, можно определить синхронную скорость п1, число полюсов 2р
и номинальное скольжение S. Допустим, на щитке асинхронного двигателя, включаемого в сеть с частотой f = 50 гЦ, указана номинальная скорость п — 940 об/мин. Помня, что скорость двигателя лишь на несколько процентов меньше синхронной а ряд синхронных скоростей при 50 гЦ представляет числа 3000; 1500; 1000; 750 и т. д. об/мин, то скорость поля для данного двигателя будет равна пх — 1000 об/мин. Число полюсов машины подсчитывают по формуле:
Номинальное скольжение двигателя равно;
Ротор и магнитное поле вращаются в одном направлении. Для изменения направления вращения (реверсирования) нужно изменить направление вращения магнитного поля. Для этого необходимо поменять два любых провода, соединяющих двигатель с сетью.
Для изменения направления вращения (реверсирования) нужно изменить направление вращения магнитного поля. Для этого необходимо поменять два любых провода, соединяющих двигатель с сетью.
В генераторном режиме ротор машины, вращаясь в направлении магнитного поля, имеет скорость выше синхронной, чему будет соответствовать отрицательное скольжение.
При генераторном режиме асинхронной машины создается скольжение от нуля до отрицательной бесконечности. Для перевода асинхронного двигателя в режим генератора необходим дополнительный двигатель, который мог бы вращать ротор со скоростью больше синхронной.
В режиме электромагнитного тормоза ротор машины вращается в противоположную сторону по отношению к направлению вращения магнитного поля. Такой режим асинхронной машины будет, если ротор при включенном статоре в сеть принудительно вращать каким-либо другим двигателем против поля и если при вращающемся роторе быстро произвести реверсирование двигателя. В режиме электромагнитного тормоза скорость ротора отрицательна, скольжение больше единицы.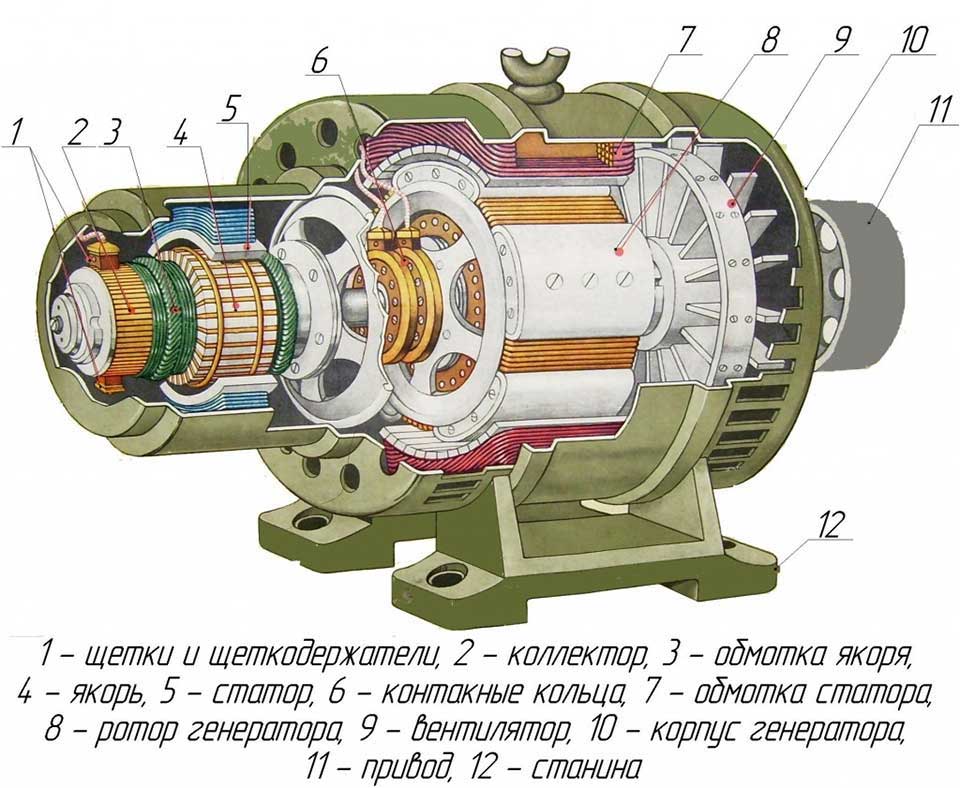 Электромагнитному тормозу асинхронной машины соответствуют скольжения от единицы до бесконечности.
Электромагнитному тормозу асинхронной машины соответствуют скольжения от единицы до бесконечности.
- Назад
- Вперед
- Назад
- Вперед
- Вы здесь:
- Главная
- Книги
- Архивы
- Ремонт трансформаторов и низковольтных аппаратов
Читать также:
- Наладка электроустановок
- Монтаж, эксплуатация и ремонт сельскохозяйственного электрооборудования
- Электрооборудование сельского хозяйства
- Электрические сети промышленных предприятий
- Монтаж электрических установок
Эксплуатация асинхронного двигателя — Обучение технике
Работа асинхронного двигателя Работа асинхронного двигателя: — Трехфазные асинхронные двигатели наиболее широко используются в промышленности. Трехфазный асинхронный двигатель обычно работает с постоянной скоростью от холостого хода до полной нагрузки. Трехфазная индукционная машина имеет некоторые преимущества, заключающиеся в простоте конструкции, низкой цене и простоте обслуживания.
Трехфазный асинхронный двигатель обычно работает с постоянной скоростью от холостого хода до полной нагрузки. Трехфазная индукционная машина имеет некоторые преимущества, заключающиеся в простоте конструкции, низкой цене и простоте обслуживания.
Конструкция асинхронного двигателя
Обычно трехфазный двигатель состоит из двигателя и статора. Этот статор несет 3-фазные обмотки, а ротор несет обмотку от короткого замыкания, называемую обмоткой ротора. Только обмотка статора от 3-х фазного питания. Асинхронный двигатель можно рассматривать как трансформатор с вращающимся вторичным трансформатором или машину переменного тока, в которой электрическая энергия преобразуется в механическую.
Типы обмоток ротора
1.
Тип спиральной клетки s Состоит из многослойного цилиндрического сердечника с параллельной осью на внешней периферии. На каждый слот устанавливается по 1 медному или алюминиевому стержню. Все эти стержни соединены на каждом конце металлическим кольцом, называемым концевыми кольцами. Это формирует постоянную обмотку короткого замыкания, которая не поддается разрушению. Все основание и торцевые кольца напоминают спиральную клетку.
Это формирует постоянную обмотку короткого замыкания, которая не поддается разрушению. Все основание и торцевые кольца напоминают спиральную клетку.
2.
Тип обмотки sСостоит из ламинированного цилиндрического сердечника и 3-фазной обмотки питания, аналогичной обмотке статора. Намотка ротора равномерно распределена по пазам и соединена по схеме звездообразного соединения. Открытые концы обмотки ротора выведены наружу и присоединены к трем изолированным контактным кольцам, установленным на валу ротора, при этом одна щетка опирается на каждое контактное кольцо.
Принцип работы
- Трехфазная обмотка статора питается от трехфазного источника питания, создается вращающееся магнитное поле, которое вращается вокруг синхронной скорости. (Ns = 120 ж/п)
- Эти вращающиеся поля взаимно проходят через воздушный зазор и разрезают неподвижный ротор из-за относительной скорости b/w вращающегося потока и неподвижного ротора, поэтому ЭДС индуцируются в проводниках ротора.
 Поскольку цепь ротора замкнута накоротко, в проводниках ротора течет ток.
Поскольку цепь ротора замкнута накоротко, в проводниках ротора течет ток.
- Эти токоведущие проводники ротора находятся в магнитном поле, создаваемом статором. На проводник действуют механические силы. Сумма механических сил, действующих на всю проводимость ротора, создает крутящий момент, который имеет тенденцию перемещать направление ротора в том же направлении вращающегося поля.
- На самом деле ротор вынужден следовать за полем статора (движение ротора в направлении поля статора можно объяснить законом Ленца, согласно которому направление тока ротора будет таким, что они будут стремиться противостоять причине, их создающей, теперь Причиной создания тока ротора является относительная скорость ч/б вращающегося поля и неподвижного проводника ротора, следовательно, чтобы уменьшить эту относительную скорость, ротор начинает двигаться в том же направлении, что и поле статора, и пытается поймать его.0030
Скольжение:- скольжение представляет собой разницу между синхронной скоростью Ns вращающегося поля статора. Фактическая скорость вращения ротора N называется скольжением. Скольжение обычно выражается в процентах от синхронной скорости.
Фактическая скорость вращения ротора N называется скольжением. Скольжение обычно выражается в процентах от синхронной скорости.
Как работает асинхронный двигатель?
26 сентября 2019 г.
Изобретение асинхронных двигателей навсегда изменило ход человеческой цивилизации. Этот столетний Двигатель, изобретенный великим ученым Николой Теслой, является наиболее распространенным типом двигателя даже сегодня. На самом деле около 50 процентов мирового потребления электроэнергии приходится на асинхронные двигатели. Приступим к работе с индукцией двигателей, или, точнее, в гениальном мышлении Николы Теслы.
Части асинхронного двигателя
Асинхронный двигатель состоит из 2 основных частей; статор и ротор (рис. 1). Статор является неподвижной частью и
ротор — вращающаяся часть. Статор в основном представляет собой обмотку из 3 катушек, и трехфазный вход переменного тока подается на
Это. Ротор находится внутри статора. Между ротором и статором будет небольшой зазор, известный как воздушный зазор. величина радиального воздушного зазора может варьироваться от 0,5 до 2 мм.
величина радиального воздушного зазора может варьироваться от 0,5 до 2 мм.
Детали конструкции статора
А Статор изготавливается путем укладки тонкощелевых высокопроницаемых стальных пластин внутри стального или чугунного каркаса. Расположение стальных пластин внутри рамы показано на следующем рисунке. Здесь лишь немногие из показаны стальные пластины. Обмотка проходит через пазы статора.
Рис. 2 Детали конструкции статораЭффект трехфазного тока, проходящего через обмотку статора
Когда через обмотку проходит трехфазный переменный ток, происходит нечто очень интересное. Он производит вращение магнитное поле (RMF). Как показано на рисунке ниже, создается магнитное поле, которое по своей природе вращается. РМФ является важным понятием в электрических машинах. Мы увидим, как это производится в следующем разделе.
Рис. 3 Вращающееся магнитное поле создается асинхронным двигателемКонцепция вращающегося магнитного поля (RMF)
Чтобы понять явление вращающегося магнитного поля, гораздо лучше рассмотреть упрощенный трехфазный
намотка всего из 3-х витков. Провод с током создает вокруг себя магнитное поле. Теперь об этом спец.
устройства, магнитное поле, создаваемое трехфазным переменным током, будет таким, как показано в конкретный момент времени.
Провод с током создает вокруг себя магнитное поле. Теперь об этом спец.
устройства, магнитное поле, создаваемое трехфазным переменным током, будет таким, как показано в конкретный момент времени.
Компоненты переменного тока будут меняться со временем. Еще два примера показаны на следующем рисунке, где из-за изменения переменного тока меняется и магнитное поле. Ясно, что магнитное поле просто принимает другую ориентацию, но его величина остается прежней. Из этих 3-х позиций видно, что подобно вращающемуся магнитному полю одинаковой силы. Скорость вращения магнитного поля называется синхронная скорость.
Рис. 5A Трехфазный переменный ток Рис. 5B Здесь проиллюстрирована концепция вращающегося магнитного поляВлияние RMF на замкнутый проводник
Предположим, вы помещаете замкнутый проводник внутрь такого вращающегося магнитного поля. Так как магнитное поле
флуктуация ЭДС будет индуцироваться в петле в соответствии с законом Фарадея. ЭДС создаст ток
через петлю. Таким образом, ситуация стала такой, как если бы петля с током находилась в магнитном поле. Этот
создаст магнитную силу в петле в соответствии с законом Лоренца, поэтому петля начнет вращаться, это
ясно показано на рис. 6.
ЭДС создаст ток
через петлю. Таким образом, ситуация стала такой, как если бы петля с током находилась в магнитном поле. Этот
создаст магнитную силу в петле в соответствии с законом Лоренца, поэтому петля начнет вращаться, это
ясно показано на рис. 6.
Работа асинхронного двигателя
Аналогичное явление также происходит внутри асинхронного двигателя. Здесь вместо простого цикла что-то очень используется аналог беличьей клетки. Беличья клетка имеет стержни, закороченные концевыми кольцами.
Трехфазный переменный ток, проходящий через обмотку статора, создает вращающееся магнитное поле. Так как в предыдущем
В этом случае в стержнях беличьей клетки индуцируется ток, и она начинает вращаться. Вы можете отметить вариацию
наведенного тока в стержнях с короткозамкнутым ротором. Это связано со скоростью изменения магнитного потока в одной белке
пара стержней, которая отличается от другой из-за разной ориентации. Это изменение тока в баре
изменится со временем.
Это изменение тока в баре
изменится со временем.
Вот почему используется название асинхронный двигатель, электричество в роторе индуцируется магнитной индукцией, а не прямое электрическое подключение. Чтобы способствовать такой электромагнитной индукции, внутри упакованы пластины с изолированным железным сердечником. ротор.
Рис.:8 Тонкие слои стальной пластины, уложенные в роторе Такие маленькие пластины стальных слоев обеспечивают минимальные потери на вихревые токи. Вы можете отметить один большой
Преимущество трехфазных асинхронных двигателей, поскольку они по своей природе являются самозапускающимися.
Также можно заметить, что стержни беличьей клетки наклонены к оси вращения, или она имеет перекос.
Это необходимо для предотвращения колебаний крутящего момента. Если бы бары были прямыми, был бы небольшой временной разрыв для
крутящий момент в паре стержней ротора для передачи на следующую пару. Это вызовет колебания крутящего момента и вибрацию.
в роторе. Обеспечивая перекос стержней ротора, прежде чем крутящий момент в одной паре стержней исчезнет, следующая пара
вступает в действие. Это позволяет избежать колебаний крутящего момента.
Это вызовет колебания крутящего момента и вибрацию.
в роторе. Обеспечивая перекос стержней ротора, прежде чем крутящий момент в одной паре стержней исчезнет, следующая пара
вступает в действие. Это позволяет избежать колебаний крутящего момента.
Скорость вращения ротора и концепция скольжения
Здесь вы можете заметить, что и магнитное поле, и ротор вращаются. Но с какой скоростью будет ротор вращать?. Чтобы получить ответ на этот вопрос, рассмотрим разные случаи.
Рассмотрим случай, когда скорость вращения ротора равна скорости магнитного поля. Ротор испытывает магнитное поле
в относительной системе отсчета. Поскольку и магнитное поле, и ротор вращаются с одинаковой скоростью, относительно
ротор, магнитное поле стационарно. Ротор будет испытывать постоянное магнитное поле, поэтому
любая ЭДС индукции и ток. Это означает нулевое усилие на стержнях ротора, поэтому ротор будет постепенно замедляться.
Но по мере его замедления контуры ротора будут испытывать переменное магнитное поле, поэтому индуцированный ток и сила будут уменьшаться. снова поднимется, и ротор ускорится. Короче говоря, ротор никогда не сможет догнать скорость
магнитное поле. Он вращается с определенной скоростью, которая немного меньше синхронной скорости. Разница в
синхронная и скорость вращения ротора называется скольжением.
снова поднимется, и ротор ускорится. Короче говоря, ротор никогда не сможет догнать скорость
магнитное поле. Он вращается с определенной скоростью, которая немного меньше синхронной скорости. Разница в
синхронная и скорость вращения ротора называется скольжением.
N
РОТОР < N SСКОЛЬЖЕНИЕ = (N
S — N R )/ N SЗНАЧЕНИЕ СКОЛЬЖЕНИЯ показано здесь 9 Рис.
Передача энергии в двигателе
Механическая мощность вращения, полученная от ротора, передается через приводной вал. Короче говоря, в асинхронном двигателе электрическая энергия поступает через статор и выводится из двигателя. механическое вращение получают от ротора.
Рис.10 Передача мощности в двигателе Но между входной и выходной мощностью будут многочисленные потери энергии, связанные с двигателем. Различный
составляющими этих потерь являются потери на трение, потери в меди, вихревые токи и потери на гистерезис. Такая потеря энергии
во время работы двигателя рассеивается в виде тепла, поэтому вентилятор на другом конце помогает охлаждать двигатель.
Такая потеря энергии
во время работы двигателя рассеивается в виде тепла, поэтому вентилятор на другом конце помогает охлаждать двигатель.
Почему асинхронные двигатели так популярны?
Теперь давайте разберемся, почему асинхронные двигатели доминируют как в промышленности, так и в быту. Вы можете заметить, что асинхронные двигатели не требуют постоянного магнита. У них нет даже щеток, коллекторных колец или позиционных датчик, как и другие аналоги электрических машин. Асинхронные двигатели также запускаются автоматически. Самое важное Преимущество заключается в том, что скорость асинхронного двигателя можно легко контролировать, контролируя частоту входной мощности.
Чтобы понять это правильно, давайте еще раз рассмотрим простое расположение катушек. Мы узнали, что вращающийся
магнитное поле создается за счет трехфазной входной мощности.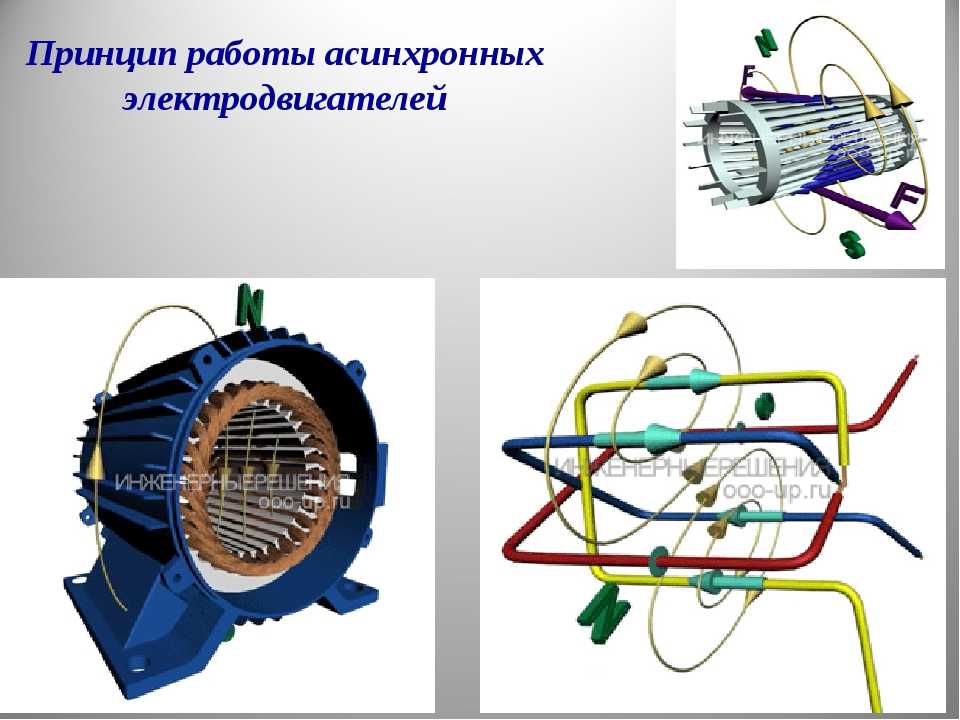 Совершенно очевидно, что скорость RMF
пропорциональна частоте входной мощности. Поскольку ротор всегда пытается догнать RMF,
скорость ротора также пропорциональна частоте переменного тока.
Совершенно очевидно, что скорость RMF
пропорциональна частоте входной мощности. Поскольку ротор всегда пытается догнать RMF,
скорость ротора также пропорциональна частоте переменного тока.
N
S ∝ fТаким образом, используя частотно-регулируемый привод, можно очень легко регулировать скорость асинхронного двигателя. Этот свойство асинхронного двигателя делает их привлекательным выбором для лифтов, кранов и даже электромобилей. В связи В диапазоне высоких скоростей асинхронных двигателей электромобили способны работать с одноступенчатой коробкой передач.
Рис.12 Односкоростная коробка передач
Рис.13 Кривые КПД асинхронного двигателя
Другое интересное свойство асинхронного двигателя заключается в том, что, когда ротор приводится в движение первичным двигателем, он также может
действует как генератор. В этом случае вы должны убедиться, что скорость RMF всегда меньше скорости вращения ротора.