Как устроен электродвигатель переменного тока. Какие бывают виды электродвигателей переменного тока. В чем заключается принцип действия асинхронного двигателя. Каковы преимущества и недостатки различных типов электродвигателей.
Основные виды электродвигателей переменного тока
Электродвигатели переменного тока широко применяются в промышленности и быту благодаря своей надежности и простоте конструкции. Существует несколько основных видов таких двигателей:
- Асинхронные двигатели
- Синхронные двигатели
- Коллекторные двигатели переменного тока
- Вентильно-индукторные двигатели
Каждый тип имеет свои особенности конструкции, принципа действия и области применения. Рассмотрим их подробнее.
Асинхронные двигатели: принцип работы и устройство
Асинхронные двигатели — наиболее распространенный тип электродвигателей переменного тока. Как они устроены и работают?
- Статор содержит обмотку, создающую вращающееся магнитное поле при подключении к сети переменного тока
- Ротор представляет собой «беличью клетку» из проводников, замкнутых накоротко
- Вращающееся поле статора наводит ток в обмотке ротора
- Взаимодействие тока ротора с полем статора создает вращающий момент
Частота вращения ротора всегда меньше частоты вращения поля статора — отсюда название «асинхронный». Разница между этими частотами называется скольжением.
Синхронные двигатели и их особенности
Синхронные двигатели отличаются тем, что частота вращения ротора в точности равна частоте вращения магнитного поля статора. Как это достигается?
- Ротор содержит постоянные магниты или электромагниты, питаемые постоянным током
- Магнитное поле ротора «зацепляется» за вращающееся поле статора
- Ротор вращается синхронно с полем статора без скольжения
Синхронные двигатели сложнее в управлении, но имеют высокий КПД и хорошие регулировочные свойства при использовании преобразователей частоты.
Коллекторные двигатели переменного тока
Коллекторные двигатели переменного тока (универсальные коллекторные двигатели) могут работать как от постоянного, так и от переменного тока. Их особенности:
- Имеют щеточно-коллекторный узел, как ДПТ
- Обмотки возбуждения и якоря соединены последовательно
- При смене полярности тока направление вращения не меняется
- Просты в регулировании скорости
Широко применяются в бытовой технике и электроинструменте, где требуется регулирование оборотов.

Преимущества и недостатки различных типов электродвигателей
Каждый тип электродвигателя имеет свои плюсы и минусы:
Асинхронные двигатели:
- + Простота и надежность конструкции
- + Низкая стоимость
- — Сложность плавного регулирования скорости
Синхронные двигатели:
- + Высокий КПД
- + Точное поддержание скорости
- — Сложность запуска
Коллекторные двигатели:
- + Простота регулирования
- + Высокий пусковой момент
- — Наличие щеточно-коллекторного узла
Выбор типа двигателя зависит от конкретного применения и требований к приводу.
Применение электродвигателей переменного тока
Области применения электродвигателей переменного тока очень широки:
- Промышленные приводы станков и механизмов
- Насосы, вентиляторы, компрессоры
- Лифты и подъемно-транспортное оборудование
- Бытовая техника (стиральные машины, пылесосы и т.д.)
- Электротранспорт (трамваи, троллейбусы, электровозы)
В промышленности чаще применяются трехфазные асинхронные и синхронные двигатели, в бытовой технике — однофазные асинхронные и коллекторные.

Регулирование скорости электродвигателей переменного тока
Регулирование скорости вращения — важная задача для многих приводов. Основные способы:
- Изменение частоты питающего напряжения с помощью преобразователей частоты
- Изменение числа пар полюсов (для асинхронных двигателей)
- Реостатное регулирование в цепи ротора (для асинхронных двигателей с фазным ротором)
- Изменение напряжения питания (для коллекторных двигателей)
Наиболее универсальным и эффективным является частотное регулирование с помощью преобразователей частоты.
Современные тенденции в развитии электродвигателей
Основные направления совершенствования электродвигателей переменного тока:
- Повышение энергоэффективности
- Применение новых магнитных материалов
- Интеграция с силовой электроникой и микропроцессорными системами управления
- Разработка специализированных двигателей для конкретных применений
- Создание безредукторных приводов с высокомоментными двигателями
Это позволяет создавать все более совершенные и эффективные электроприводы для различных отраслей.
Коллекторный электродвигатель переменного тока — устройство
В бытовой технике, ручном электроинструменте, автомобильном электрооборудовании и системах автоматики очень часто применяется коллекторный электродвигатель переменного тока, схема подключения которого, как и устройство схожи с двигателями постоянного возбуждения постоянного тока.
Столь распространенное применение их объясняется компактностью, небольшим весом, невысокой стоимостью и простотой управления. В этом сегменте наиболее востребованы двигатели с высокой частотой и малой мощностью.
Принцип работ и конструктивные особенности
Устройство это достаточно специфичное, обладающее в силу схожести с машинами постоянного тока, похожими характеристиками и присущими им достоинствами.
Отличие от двигателей постоянного тока состоит в материале корпуса статора, изготовленном из листов электротехнической стали, благодаря чему удается добиться снижения потерь на вихревые токи.
Чтобы двигатель мог работать от обычной сети, т.е. 220 в, обмотки возбуждения соединяются последовательно.
Эти двигатели, называемые универсальными благодаря тому, что работают они от переменного и постоянного тока, бывают одно- и трехфазными.
Видео: Универсальный коллекторный двигатель
Из чего состоит конструкция?
Устройство электродвигателя переменного тока включает помимо ротора и статора:
- тахогенератор;
- щеточно-коллекторный механизм.
Ток якоря взаимодействует с магнитным потоком обмотки возбуждения, вызывая в коллекторном механизме вращение ротора. Ток подается через щетки на коллектор, являющийся узлом ротора и соединенным с обмоткой статора последовательно. Он собран из пластин, имеющих в сечении форму трапеции.
Продемонстрировать принцип работы такого двигателя можно с помощью хорошо известного со школьной программы опыта с вращающейся рамкой, которую поместили между разноименными полюсами магнитного поля. Она вращается под воздействием динамических сил, когда по ней протекает ток. При изменении направления тока, рамка не меняет направления вращения.
Примести к выходу из строя механизма могут высокие обороты холостого хода, вызванные максимальным моментом при последовательном подсоединении обмоток возбуждения.
Схема подключения (упрощенная)
Типовая схема подключения предусматривает вывод на контактную планку до десяти контактов. Протекающий по одной из щеток ток L поступает на коллектор и якорь, затем переходит на обмотки статора через вторую щетку и перемычку, выходя на нейтраль N.
Реверса мотора подобный способ подключения не предусматривает, поскольку подсоединение обмоток параллельное приводит к одновременной смене полюсов магнитных полей.
В итоге, направление момента всегда одинаково.
Изменить направление вращения возможно, если поменять на контактной планке местами выхода обмоток. Напрямую двигатель включают, когда вывода ротора и статора подсоединены щеточно-коллекторный механизм. Для включения второй скорости используются выводы половины обмотки. Нельзя забывать, что с момента такого подключения мотор работает на максимальную мощность, поэтому время его эксплуатации не может превышать 15 секунд.
Видео: Подключение и регулировка оборотов двигателя от стиральной машины
Управление двигателем
На практике применяют различные способы регулирования работы двигателя. Это может быть электронная схема, где регулирующим элементом выступает симистор, который на мотор «пропускает» заданное напряжение. Работает он как мгновенно срабатывающий ключ, открываясь, когда на его затвор поступает управляющий импульс.
В основе принципа действия, реализованного в схемах с симистором, лежит двухполупериодное фазовое регулирование, где к импульсам, которые поступают на электрод, привязано напряжение, подаваемое на двигатель. При этом, частота, с которой вращается якорь, прямо пропорциональна напряжению, подаваемому на обмотки.
Упрощенно этот принцип можно описать такими пунктами:
- на затвор симистора подается сигнал от электронной схемы;
- затвор открывается, ток течет по обмоткам статора, вызывая вращение якоря мотора М;
- мгновенные величины частоты вращения преобразуются тахогенератором в электрические сигналы, формируя с импульсами управления обратную связь;
- как следствие, вращение ротора при любых нагрузках, остается равномерным;
- с помощью реле R и R1 осуществляется реверс мотора.
Другая схема – тиристорана фазоимпульсная.
Преимущества машин и недостатки
К достоинствам относят:
- небольшие размеры;
- универсальность, т.
 е. работу на напряжении постоянном и переменном;
е. работу на напряжении постоянном и переменном; - большой пусковой момент;
- независимость от сетевой частоты;
- быстроту;
- мягкую регулировку оборотом в широком диапазоне при варьировании напряжением питания.
Недостатки связаны и использованием щеточно-коллекторного перехода, влекущего:
- уменьшение срока службы механизма;
- возникновение между щетками и коллектором искры;
- высокий уровень шума;
- большое число коллекторных элементов.
Основные неисправности
Искрение, возникающее между щетками и коллектором – самый главный вопрос, требующий внимания. Чтобы избежать неисправностей более серьезных, таких как их отслаивание и деформация или перегрев ламелей, сработавшуюся щетку необходимо заменить.
Помимо этого, возможно замыкание между обмотками якоря и статора, вызывающее сильное искрение на переходе коллектор-щетка или значительное падение магнитного поля.
Чтобы продлить срок службы двигателя, необходимо соблюдение двух условий – профессиональный изготовитель и грамотный пользователь, т.
е. строгое соблюдение режима работы.
Видео: Коллекторный электрический двигатель
какие они бывают / Блог компании НПФ ВЕКТОР / Хабр
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810кВт и напряжением 1500В.
Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже.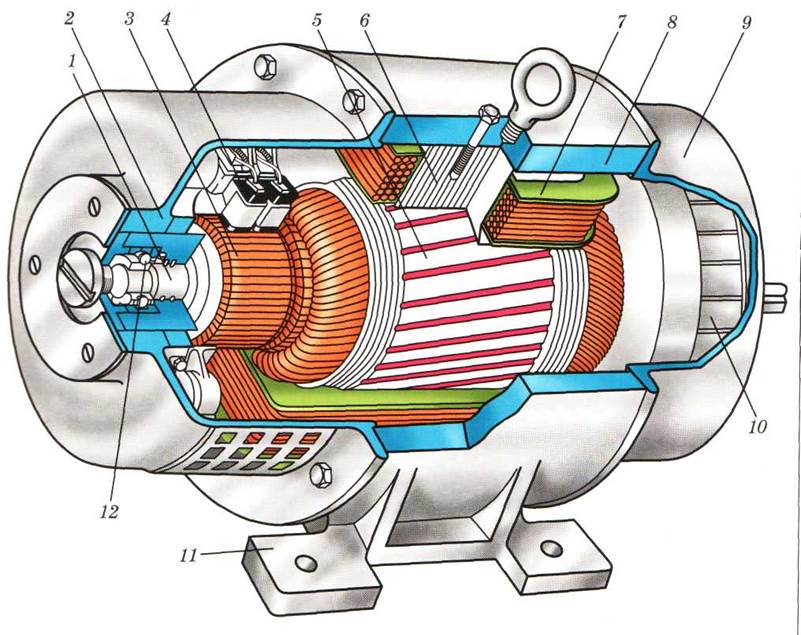 Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
Как изменить направление вращения двигателя постоянного тока? Это знают все, надо сменить полярность питания якоря. А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
Этот тип двигателей наиболее широко распространен в бытовой технике, где требуется регулировать частоту вращения: дрели, стиральные машины (не с «прямым приводом»), пылесосы и т. п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным).
 Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.
Асинхронный двигатель применяется и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники. Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
Про принцип работы синхронного двигателя также была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.

Все эти машины выполнялись с контактными кольцами (можно увидеть на фото), о возбуждении от постоянных магнитов при таких мощностях речи, конечно же, не идет. При этом у синхронного двигателя, в отличие от асинхронного, большие проблемы с пуском. Если включить мощную синхронную машину напрямую на трехфазную сеть, то всё будет плохо. Так как машина синхронная, она должна вращаться строго с частотой сети. Но за время 1/50 секунды ротор, конечно же, разогнаться с нуля до частоты сети не успеет, а поэтому он будет просто дергаться туда-сюда, так как момент получится знакопеременный. Это называется «синхронный двигатель не вошел в синхронизм». Поэтому в реальных синхронных машинах применяют асинхронный пуск – делают внутри синхронной машины небольшую асинхронную пусковую обмотку и закорачивают обмотку возбуждения, имитируя «беличью клетку» асинхронника, чтобы разогнать машину до частоты, примерно равной частоте вращения поля, а уже после этого включается возбуждение постоянным током и машина втягивается в синхронизм.
И если у асинхронного двигателя регулировать частоту ротора без изменения частоты поля хоть как-то можно, то у синхронного двигателя нельзя никак. Он или крутится с частой поля, или выпадает из синхронизма и с отвратительными переходными процессами останавливается. Кроме того, у синхронного двигателя без магнитов есть контактные кольца – скользящий контакт, чтобы передавать энергию на обмотку возбуждения в роторе. С точки зрения сложности, это, конечно, не коллектор ДПТ, но всё равно лучше бы было без скользящего контакта. Именно поэтому в промышленности для нерегулируемой нагрузки применяют в основном менее капризные асинхронные привода.
Но все изменилось с появлением силовой полупроводниковой электроники и микроконтроллеров. Они позволили сформировать для синхронной машины любую нужную частоту поля, привязанную через датчик положения к ротору двигателя: организовать вентильный режим работы двигателя (автокоммутацию) или векторное управление. При этом характеристики привода целиком (синхронная машина + инвертор) получились такими, какими они получаются у двигателя постоянного тока: синхронные двигатели заиграли совсем другими красками.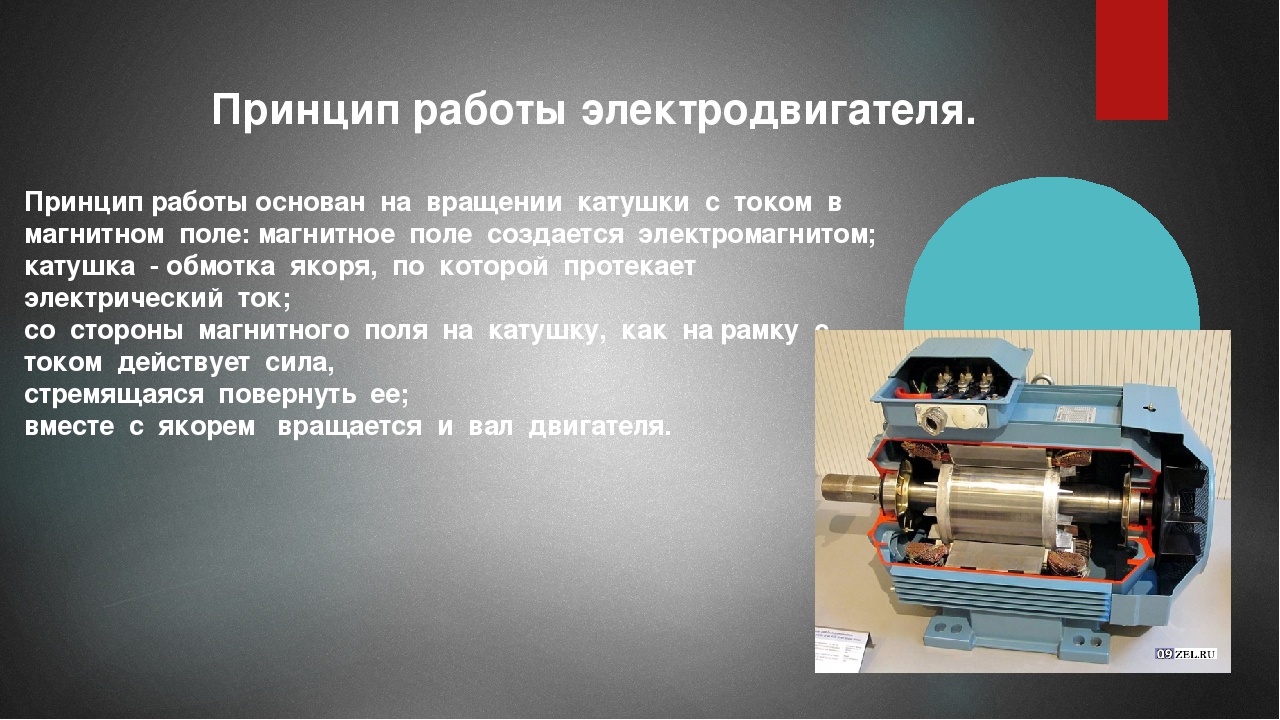 Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
У него много названий. Обычно его коротко называют вентильно-индукторный двигатель (ВИД) или вентильно-индукторная машина (ВИМ) или привод (ВИП). В английской терминологии это switched reluctance drive (SRD) или motor (SRM), что переводится как машина с переключаемым магнитным сопротивлением.
 Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
Подавая постоянный ток в фазы в соответствии с текущим положением ротора можно заставить двигатель вращаться. Фаз может быть разное количество. Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Однако за простоту двигателя приходится платить.
 Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Однако даже при этих недостатках двигатели остаются перспективными в качестве регулируемого привода. Благодаря их простоте сам двигатель получается дешевле классического асинхронного двигателя. Кроме того, двигатель легко сделать многофазным и многосекционным, разделив управление одним двигателем на несколько независимых преобразователей, которые работают параллельно. Это позволяет повысить надежность привода – отключение, скажем, одного из четырех преобразователей не приведет к остановке привода в целом – трое соседей будут какое-то время работать с небольшой перегрузкой. Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других. Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Мы на фирме ООО «НПФ ВЕКТОР» выполнили несколько проектов на базе этого двигателя. Например, делали небольшой привод для насосов горячего водоснабжения, а также недавно закончили разработку и отладку системы управления для мощных (1,6 МВт) многофазных резервируемых приводов для обогатительных фабрик АК «АЛРОСА». Вот машинка на 1,25 МВт:
Вся система управления, контроллеры и алгоритмы были сделаны у нас в ООО «НПФ ВЕКТОР», силовые преобразователи спроектировала и изготовила фирма ООО «НПП «ЦИКЛ+». Заказчиком работы и проектировщиком самих двигателей являлась фирма ООО «МИП «Мехатроника» ЮРГТУ (НПИ)».
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Ротор собран из двух пакетов (из двух половинок), между которыми установлена обмотка возбуждения (на рисунке показана как четыре витка медного провода). Несмотря на то, что обмотка висит «посередине» между половинками ротора, крепится она к статору и не вращается. Ротор и статор выполнены из шихтованного железа, постоянные магниты отсутствуют. Обмотка статора распределенная трехфазная – как у обычного асинхронного или синхронного двигателя. Хотя существуют варианты такого типа машин с сосредоточенной обмоткой: зубцами на статоре, как у SRD или BLDC двигателя. Витки обмотки статора охватывают сразу оба пакета ротора.
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
С точки зрения управления ВИД НВ оказывается эквивалентен синхронной машине с контактными кольцами. То есть, если вы не знаете конструкцию этой машины и используете её как «черный ящик», то она ведет себя практически неотличимо от синхронной машины с обмоткой возбуждения. Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).
На основе данного двигателя мы также сделали несколько успешных проектов. Например, один из них – это серия приводов насосов и вентиляторов для районных теплостанций г. Москвы мощностью 315-1200кВт (ссылка на проект). Это низковольтные (380В) ВИД НВ с резервированием, где одна машина «разбита» на 2, 4 или 6 независимых трехфазных секций. На каждую секцию ставится свой однотипный преобразователь с векторным бездатчиковым управлением. Таким образом можно легко наращивать мощность на базе однотипной конструкции преобразователя и двигателя. При этом часть преобразователей подключено к одному вводу питания районной теплостанции, а часть к другому. Поэтому если происходит «моргушка питания» по одному из вводов питания, то привод не встает: половина секций кратковременно работают в перегрузке, пока питание не восстановится. Как только оно восстанавливается, на ходу в работу автоматически вводятся отдыхавшие секции. Вообще, наверное, этот проект заслуживал бы отдельной статьи, поэтому пока про него закончу, вставив фото двигателя и преобразователей:
К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Как показывает опыт, все три типа машин успешно применяются. Но – асинхронный привод невозможно (или очень сложно) секционировать, т.е. разбить мощную машину на несколько маломощных. Поэтому для обеспечения большой мощности асинхронного преобразователя требуется делать его высоковольтным: ведь мощность – это, если грубо, произведение напряжения на ток. Если для секционируемого привода мы можем взять низковольтный преобразователь и наставить их несколько, каждый на небольшой ток, то для асинхронного привода преобразователь должен быть один. Но не делать же преобразователь на 500В и ток 3 килоампера? Это провода нужны с руку толщиной. Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Но всё становится еще интереснее, когда речь заходит о транспорте или о малогабаритных устройствах. Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
На рисунке по горизонтальной оси отложен момент двигателя, по вертикальной – частота вращения. Звездочкой отмечена точка номинального режима, например, пусть это будет 60кВт. Заштрихованный прямоугольник – это диапазон, где возможно регулирование синхронной машины без проблем – т.е. «вниз» по моменту и «вниз» по частоте от номинала. Красной линией отмечено, что можно выжать из синхронной машины сверх номинала – небольшое повышение частоты вращения за счет так называемого ослабления поля (на самом деле это создание лишнего реактивного тока по оси d двигателя в векторном управлении), а также показана некоторая возможная форсировка по моменту, чтобы было безопасно для магнитов. Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
Что же это значит? Синхронная машина не подходит для электротяги без коробки передач? Подходит, конечно же, просто надо по-другому её выбрать. Вот так:
Надо выбрать такую синхронную машину, чтобы требуемый тяговый диапазон регулирования был весь внутри её механической характеристики. Т.е. чтобы машина одновременно могла развить и большой момент, и работать на большой частоте вращения. Как вы видите из рисунка… установленная мощность такой машины будет уже не 60кВт, а 540кВт (можно посчитать по делениям). Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Конечно же, так как описано, никто не делает. Никто не ставит машину на 540кВт вместо 60кВт. Синхронную машину модернизируют, пытаясь «размазать» её механическую характеристику из оптимума в одной точке вверх по скорости и вниз по моменту. Например, прячут магниты в железо ротора (делают инкорпорированными), это позволяет не бояться размагнитить магниты и ослаблять поле смелее, а также перегружать по току побольше. Но от таких модификаций синхронная машина набирает вес, габариты и становится уже не такой легкой и красивой, какой она была раньше. Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т.п.
Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.п.). Какая же электрическая машина переменного тока может с ним поспорить?
К такой характеристике (постоянства мощности) могут лучше приблизиться двигатели, у которых регулируется возбуждение. Это асинхронный двигатель и оба типа ВИПов. Но у асинхронного двигателя есть две проблемы: во-первых, его естественная механическая характеристика – это не кривая постоянства мощности. Потому что возбуждение асинхронного двигателя осуществляется через статор. А поэтому в зоне ослабления поля при постоянстве напряжения (когда на инверторе оно закончилось) подъем частоты в два раза приводит к падению тока возбуждения в два раза и моментоообразующего тока тоже в два раза. А так как момент на двигателе – это произведение тока на поток, то момент падает в 4 раза, а мощность, соответственно, в два. Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Здесь нужно отметить, как мастерски обе проблемы асинхронного двигателя обошли в Тесла в своей Model S. Проблему с отводом тепла из ротора они решили… заведя во вращающийся ротор жидкость (у них есть соответствующий патент, где вал ротора полый и он омывается внутри жидкостью, но достоверно я не знаю, применяют ли они это). А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же? ВИД НВ – идеальная машина для тяги без единой проблемы? На самом деле нет. Проблем у него тоже куча. Например, его обмотка возбуждения, которая «висит» между пакетами статора. Хоть она и не вращается, от неё тоже сложно отводить тепло – получается ситуация почти как ротором асинхронника, лишь немного получше. Можно, в случае надобности, «кинуть» трубку охлаждения со статора. Вторая проблема – это завышенные массогабаритные показатели. Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
А также есть еще общая проблема обоих типов ВИД. Их ротор – пароходное колесо. И на высоких частотах вращения (а высокая частота нужна, так высокочастотные машины при той же мощности меньше тихоходных) потери от перемешивания воздуха внутри становятся очень значительными. Если до 5000-7000 об/мин ВИД еще можно сделать, то на 20000 об/мин это получится большой миксер. А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
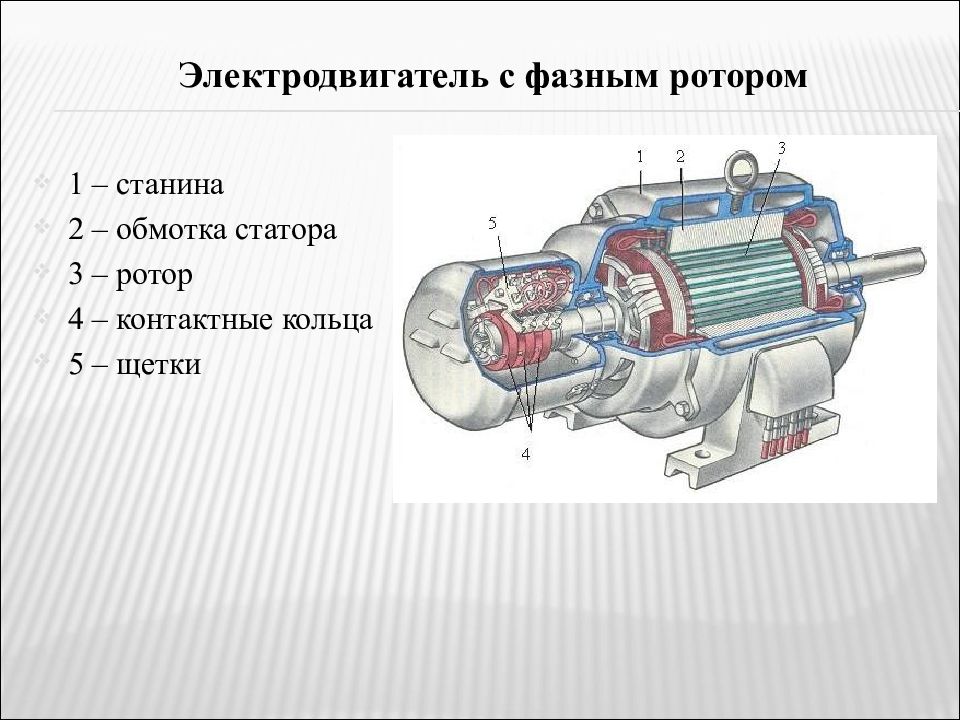
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
3. Шаговые двигатели не рассмотрены, потому что по принципу действия они в первом приближении схожи либо с синхронными машинами с постоянными магнитами, либо с SRD двигателями — зависит от конкретного типа шаговика. Только шаговые двигатели, в отличие от «силовых» приводов, имеют гораздо большее количество пар полюсов (зубцов) для увеличения коэффициента электрической редукции: чтобы одному периоду тока соответствовало меньшее угловое перемещение вала. Управление шаговиками обычно тривиальное — последовательный перебор фаз друг за другом (шаги). Более продвинутые системы дробят шаг, подавая в двигатель «микрошаги» — по сути приближая управление к синусоидальному. Еще более продвинутые используют датчик положения ротора и применяют полноценное векторное управление. Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Устройство электродвигателей переменного тока :: SYL.ru
При помощи электродвигателей переменного тока происходит конвертация электроэнергии в механическую. Бывают моторы переменного и постоянного тока. У них есть много отличий, особенно в конструкции. В промышленности большое распространение получили электродвигатели, работающие на переменном токе. Их можно встретить как в бытовых приборах, так и в промышленности. Они встречаются везде — в стиральных машинах, автомобилях, перфораторах, болгарках, производственных станках.
Как работает электродвигатель?
Функционирование электромоторов напрямую зависит от законов Ампера и электромагнитной индукции Фарадея. Закон Фарадея гласит, что на замкнутых проводниках, которые расположены в магнитном поле, генерируется ЭДС. В моторах поле создается обмотками статора, именно по ним проходит переменный электрический ток. Трехфазные электрические двигатели переменного тока работают именно по этим законам.
Закон Ампера описывает вращение ротора внутри статора. Когда по проводнику протекает электрический заряд, при условии, что воздействует магнитное поле, появляется электродвижущая сила. Причём эта движущая сила направлена перпендикулярно силовым линиям поля. При этом ротор, установленный по центру двигателя на подшипниках, начинает вращаться.
Асинхронный двигатель
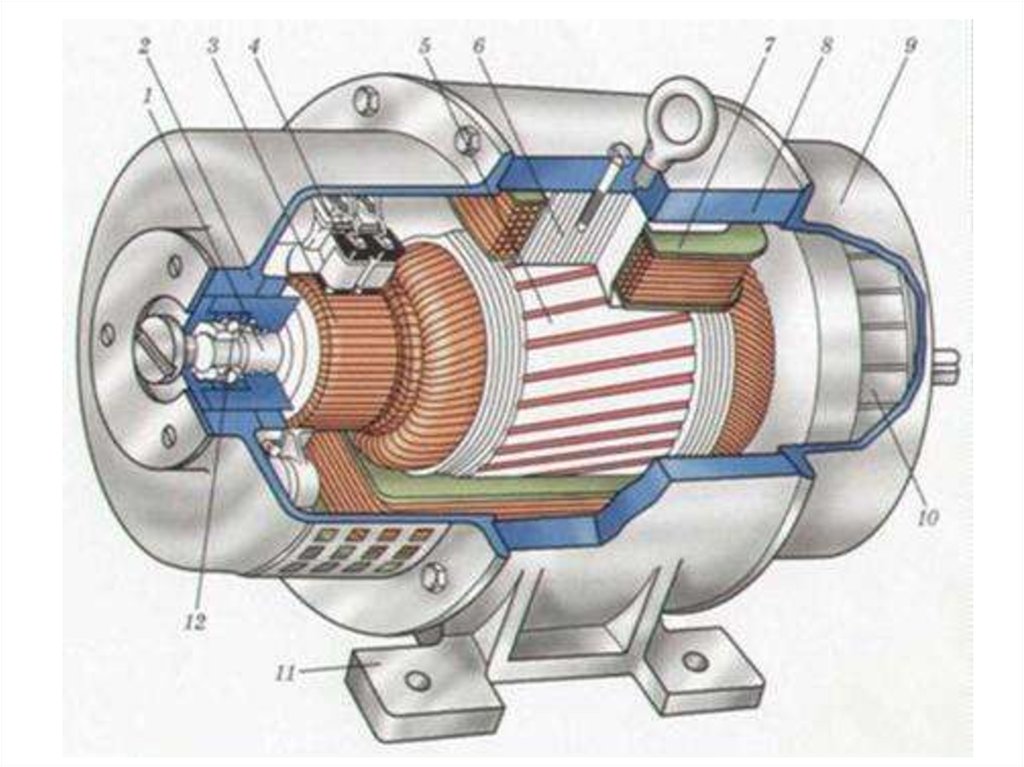
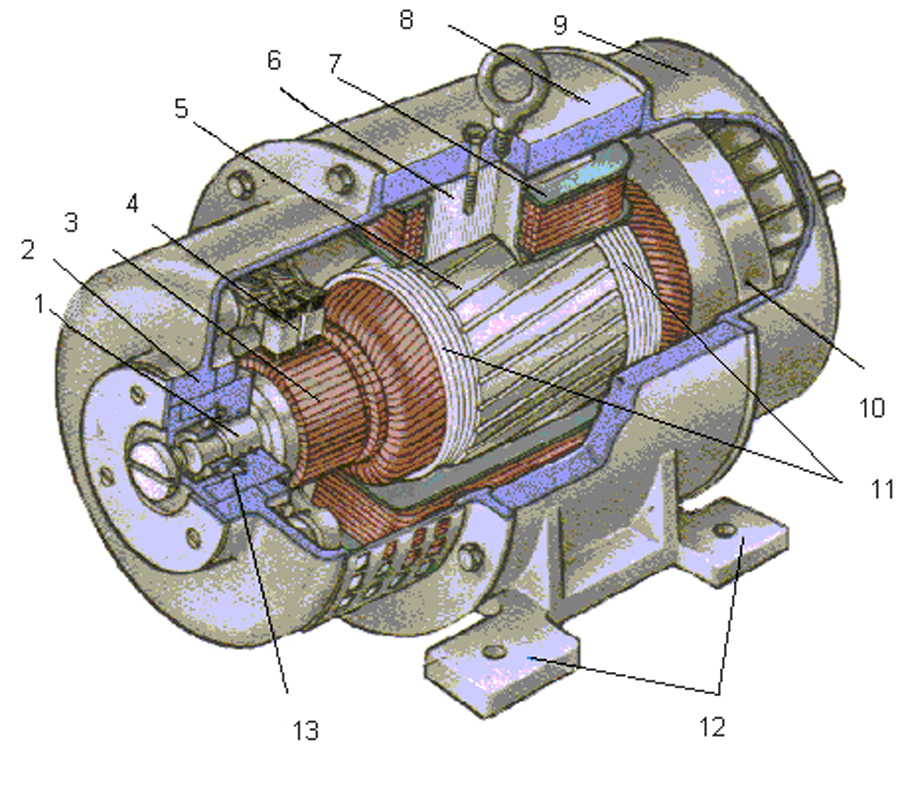
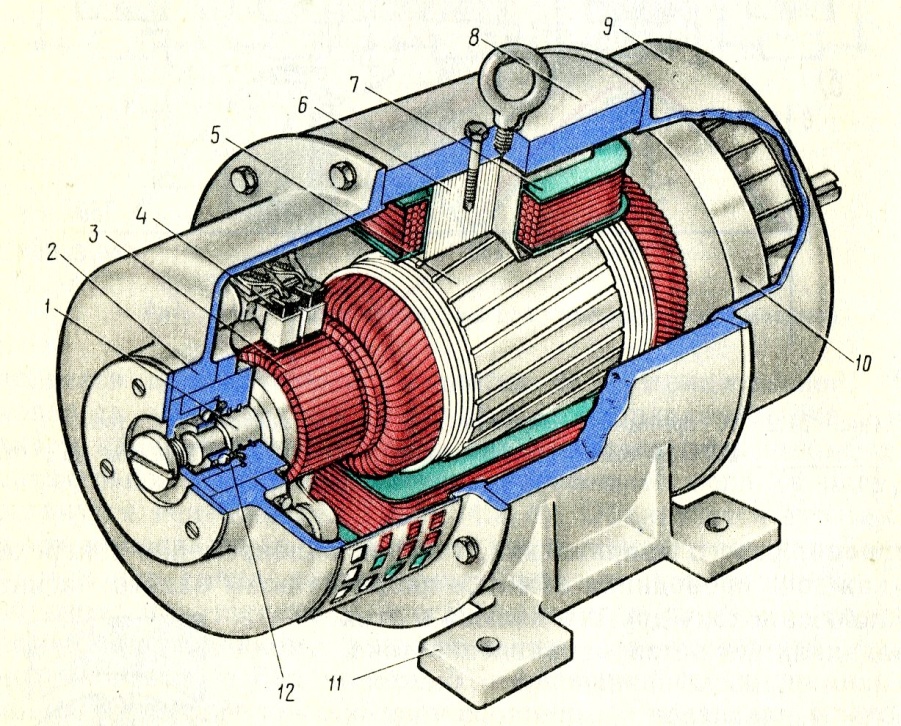
В промышленности огромную популярность завоевали асинхронные электродвигатели переменного тока. Они очень неприхотливые, отдают высокую мощность, надежны. Устройство электродвигателя переменного тока асинхронного типа состоит из нескольких частей:
- Неподвижная часть — статор, имеет цилиндрическую форму. Выполнен из стальных листов с пазами, в которые укладываются обмотки. Оси обмоток расположены под углом 120 градусов друг к другу. Все края обмоток выводятся в коробку, расположенную сверху мотора. Всего шесть выводов, которые можно соединить по схеме «звезда» или «треугольник». Зависит от того, какие параметры у электропривода.
- Чаще всего используется короткозамкнутый ротор. Конструкция его называется «беличья клетка» за внешнее сходство. В ней имеется несколько стержней из меди или алюминия, которые коротко замкнуты при помощи металлических колец на торцах.
- Фазный ротор немного иной конструкции. На нем укладывается три обмотки, напоминающие те, которые расположены в статоре. Края всех обмоток выводятся в коробку, где производится их соединение. При помощи фазного ротора можно добавить в цепь питания обмотки резистор, способный менять сопротивление. Это позволяет уменьшить силу тока при запуске.
Обязательно на асинхронном электродвигателе устанавливается крыльчатка, которая позволяет охлаждать обмотки, две крышки, подшипники, коробка, вал.
Как работает асинхронник?
Функционирует асинхронный электрический двигатель по законам электромагнитной индукции. ЭДС возникает в том случае, когда у магнитного поля обмоток статора и ротора разная скорость вращения. В случае, если эти параметры были бы одинаковы, электродвижущая сила не смогла бы сгенерироваться. Но так как на ротор воздействуют тормозящие факторы, например, трение и нагрузка со стороны подшипников, то всегда будут благоприятные условия для работы устройства.
Синхронные электродвигатели
Однофазные электродвигатели переменного тока синхронного типа получили широкое распространение. Конструкция у таких моторов немного отличается от рассмотренной выше. В них ротор вращается с такой же скоростью, с какой движется магнитное поле обмоток статора. А на якоре имеются обмотки, соединенные с коллектором. Конструкция контактных площадок выполнена так, что в один момент времени питание подается при помощи графитовых щеток только на пару противоположных ламелей.
Следовательно, запитана только одна обмотка на роторе. Подобные коллекторные электродвигатели переменного тока получили широкое распространение в бытовой технике. Например, в электроинструментах, стиральных машинах, двигателях привода компрессоров кондиционеров или холодильников.
Как работает синхронный электродвигатель?
Всего можно выделить несколько этапов работы асинхронного электродвигателя:
- Возникновение вращающего момента происходит, как только начинают взаимодействовать магнитный поток в статоре и электрический ток в роторе.
- Магнитный поток изменяет направление своего движения. Причём происходит это одновременно с реверсом тока. При помощи такого поведения получается сохранить вращение ротора в одном направлении.
- Чтобы добиться необходимой частоты вращения ротора, достаточно произвести регулировку питающего напряжения. Во многих бытовых приборах используется для этой цели простой реостат, который изменяет свое сопротивление.
Конструкция синхронного двигателя весьма ненадежная, так как очень часто изнашиваются графитовые щетки, либо ослабляются их пружины. При разрушении подшипников на валу появляется характерный неприятный звук. Со временем загрязняются ламели на коллекторе. Их можно очистить при помощи наждачной бумаги или спиртосодержащими растворами.
Особенности диагностики синхронных двигателей
Чтобы осуществить проверку электродвигателя, необходимо полностью обесточить инструмент и разобрать его. Если имелось короткое замыкание, то внутри изоляционный материал начнёт оплавляться, и появится неприятный запах. Поэтому первым делом необходимо понюхать ротор. Если нет признаков поломки, то проверьте на якоре состояние ламелей. Делается это при помощи мультиметра.
Переключаете его в режим измерения сопротивления с порогом 200 Ом. Прозвоните все соседние ламели. Если сопротивление меняется, то это говорит о том, что внутри катушки имеется поломка. Вместо мультиметра можно использовать простую лампу накаливания. Для этого необходимо подключить электродвигатель к источнику питания 12 Вольт, в разрыв установить лампу накаливания. Вращая вал рукой, необходимо посмотреть на поведение лампы.
В случае если лампа начинает моргать, это говорит о наличии межвиткового замыкания. Если же она совсем не горит, то имеется обрыв в цепи питания, либо неисправна одна из ламелей. Чтобы проводить ремонт, необходимо заменить обмотку и установить новую изоляцию. Только в этом случае двигатель не перегорит. Обязательно после ремонта проведите испытание электродвигателя переменного тока. Для увеличения ресурса мотора обязательно нужно проводить перемотку ротора каждые два года.
Преимущества и недостатки моторов, работающих на переменном токе
Большую популярность приобрели трехфазные электродвигатели переменного тока асинхронного типа. В промышленности их доля составляет более 95%. Но у них имеется недостаток — изменение частоты вращения можно производить только лишь путем регулировки частоты электрического тока. Для этого используются частотные преобразователи, стоимость которых довольно высокая. При изменении частоты вращения снижается, причем существенно, мощность электродвигателя. У асинхронников очень высокий пусковой ток, а момент при старте крайне низкий. Но можно также применять редукторы, чем-то похожие на автоматическую коробку передач, используемую в автомобилях.
У синхронных моторов имеется один большой недостаток — это его конструкция. Щетки из графита очень быстро разрушаются под действием нагрузки, в результате чего теряется контакт. У них также могут выходить из строя подшипники, разрушаться обмотки, а их вдвое больше, нежели у асинхронных машин. Запустить синхронную машину намного сложнее, нежели асинхронную. Поэтому в промышленности они большого распространения не получили. Да и асинхронник способен дольше работать под большими нагрузками, не испытывая «дискомфорт».
Подключение к трехфазной сети питания
Всего имеется две схемы, по которым соединяются обмотки трехфазных электрических двигателей:
- «Звезда» — крайне низкие пусковые токи, но добиться высокой мощности в этом случае вряд ли получится.
- «Треугольник» — пусковой ток очень высокий, поэтому использование такой схемы рекомендуется при работе в устоявшемся режиме.
Подключить асинхронный двигатель к сети переменного тока с трехфазным напряжением очень просто.
Для этого в клеммной коробке необходимо соединить шесть выводов обмоток. Но если вы произведете подключение неверно, то обмотки расплавятся. Потребуется проводить ремонт электрической машины. Синхронные машины намного сложнее подключить, так как необходимо правильно соединить обмотки ротора из статора.
Подключение трехфазного двигателя в однофазную сеть
Для того чтобы произвести подключение трехфазного асинхронного двигателя в бытовую сеть, лучше всего воспользоваться конденсаторами. С их помощью можно произвести сдвиг по фазе питающего напряжения. Таким образом, вы получите третью дополнительную фазу, необходимую для запуска и работы электродвигателя. Если нужно запускать мотор мощностью до 1,5 кВт, то достаточно применять один рабочий конденсатор. Если же мощность свыше 1,5 кВт, то параллельно ему потребуется включать еще один посредством выключателя. Он должен работать только несколько секунд, пока двигатель не запустится. Так запускаются электродвигатели переменного тока 220В и 380В от бытовой сети.
Принцип работы универсального коллекторного двигателя — Moy-Instrument.Ru
Универсальный двигатель
Конструкция универсального электродвигателя
Конструкция универсального коллекторного электродвигателя не имеет принципиальных отличий от конструкции коллекторного электродвигателя постоянного тока с обмотками возбуждения, за исключением того, что вся магнитная система (и статор, и ротор) выполняется шихтованной и обмотка возбуждения делается секционированной. Шихтованная конструкция и статора, и ротора обусловлена тем, что при работе на переменном токе их пронизывают переменные магнитные потоки, вызывая значительные магнитные потери.
Секционирование обмотки возбуждения вызвано необходимостью изменения числа витков обмотки возбуждения с целью сближения рабочих характеристик при работе электродвигателя от сетей постоянного и переменного тока [2].
Универсальный коллекторный электродвигатель может быть выполнен как с последовательным, так и с параллельным и независимым возбуждением.
В настоящее время универсальные коллекторные электродвигатели выполняют только с последовательным возбуждением .
Принцип работы универсального двигателя
Возможность работы универсального двигателя от сети переменного тока объясняется тем, что при изменении полярности подводимого напряжения изменяются направления токов в обмотке якоря и в обмотке возбуждения. При этом изменение полярности полюсов статора практически совпадает с изменением направления тока в обмотке якоря. В итоге направление электромагнитного вращающего момента не изменяется:
,
- где M — электромагнитный момент, Н∙м,
- – постоянный коэффициент, определяемый конструктивными параметрами двигателя,
- – ток в обмотке якоря, А,
- Ф — основной магнитный поток, Вб.
В качестве универсального используют двигатель последовательного возбуждения, у которого ток якоря является и током возбуждения, что обеспечивает почти одновременное изменение направления тока в обмотке якоря Iа и магнитного потока возбуждения Ф при переходе от положительного полупериода переменного напряжения сети к отрицательному.
Если двигатель подключить к сети синусоидального переменного тока, то ток якоря Ia и магнитный поток Ф будут изменяться по синусоидальному закону:
,
- где i — ток, А,
- – амплитуда тока, А,
- – частота, рад/c.
,
- где – наибольшее значение магнитного потока, Вб,
- – угол сдвига фаз между током возбуждения и магнитным потоком, обусловленный магнитными потерями в двигателе, рад.
Отсюда получим формулу электромагнитного момента коллекторного двигателя последовательного возбуждения, включенного в сеть синусоидального переменного тока, Нм:
.
.
Первая часть выражения представляет собой постоянную составляющую электромагнитного момента Mпост , а вторая часть — переменную составляющую этого момента Мпер , изменяющуюся во времени с частотой, равной удвоенной частоте напряжения питания.
Таким образом, результирующий электромагнитный момент при работе двигателя от сети переменного тока пульсирует. Пульсации электромагнитного момента практически не нарушают работу двигателя. Объясняется это тем, что при значительной частоте пульсаций электромагнитного момента () и большом моменте инерции якоря вращение последнего оказывается равномерным.
Особенности универсального двигателя
Коэффициент полезного действия универсального двигателя при его работе от сети переменного тока более низкий, чем при его работе от сети постоянного тока. Другой недостаток универсального двигателя — тяжелые условия коммутации, вызывающие интенсивное искрение на коллекторе при включении двигателя в сеть переменного тока. Этот недостаток объясняется наличием трансформаторной связи между обмотками возбуждения и якоря, что ведет к наведению в коммутируемых секциях трансформаторной ЭДС, ухудшающей процесс коммутации в двигателе.
Наличие щеточно-коллекторного узла является причиной ряда недостатков универсальных коллекторных двигателей, особенно при их работе на переменном токе (искрение на коллекторе, радиопомехи, повышенный шум, невысокая надежность). Однако эти двигатели по сравнению с асинхронными и синхронными при частоте питающего напряжения f = 50 Гц позволяют получать частоту вращения до 10 000 об/мин и более (наибольшая синхронная частота вращения при f = 50 Гц равна 3000 об/мин) [3].
Области использования
Благодаря тому, что универсальный двигатель может иметь высокую скорость вращения при работе от однофазной сети переменного тока без использования дополнительных преобразовательных устройств, он получил широкое применение в таких домашних приборах как пылесосы, блендеры, фены и др. Так же универсальный электродвигатель широко используется в таких инструментах, как дрели и шуруповерты.
Благодаря тому, что скорость вращения универсального двигателя легко регулируется изменением величины питающего напряжения ранее он широко использовался в стиральных машинах. Сейчас благодаря развитию преобразовательной техники более широкое использование получают бесщеточные электродвигатели (СДПМ, АДКР) скорость вращения которых регулируется изменением частоты напряжения питания.
Универсальные коллекторные двигатели
Универсальные коллекторные двигатели — это электродвигатели малой мощности последовательного возбуждения с секционированной обмоткой возбуждения, благодаря чему они могут работать как на постоянном, так и на переменном стандартных напряжениях примерно с одинаковыми свойствами и характеристиками. Такие электродвигатели используют для привода маломощных быстроходных устройств и многих бытовых приборов. Они допускают простое, широкое и плавное регулирование скорости.
По своему устройству эти двигатели отличаются от двигателей постоянного тока общего применения конструкцией статора, магнитную систему которого собирают из топких изолированных друг от друга листов электротехнической стали с выступающими полюсами, на которых размещают по две секции обмотки возбуждения. Эти секции соединяют последовательно с якорем и располагают по обе стороны от его выводов, что снижает радиопомехи от ценообразования на коллекторе под щетками, которое при питании двигателя от сети переменного напряжения особенно усиливается из-за существенного ухудшения условий коммутации.
В зависимости от конструкции двигателя обмотка возбуждения может быть соединена с якорем внутри машины или может иметь самостоятельные наружные зажимы, что удобнее для изменения направления вращения якоря путем перемены мест проводов, подходящих к его зажимам или к зажимам обмотки возбуждения. Якорь универсальных двигателей устроен так же, как и якорь машин постоянного тока, а обмотка его присоединена к коллекторным пластинам, к которым прижаты щетки.
Пуск этих двигателей выполняют непосредственным включением в сеть постоянного или переменного напряжения, которое соответствует номинальному напряжению, указанному в ее табличке.
Скорость якоря универсального коллекторного двигателя последовательного возбуждения прямо пропорциональна напряжению на его зажимах и обратно пропорциональна амплитуде магнитного потока, зависящей от нагрузки на валу электродвигателя.
Механические характеристики у таких электродвигателей отличаются в зависимости от того на каком напряжении (переменном или постоянном) работает электродвигатель, так как при питании от сети постоянного напряжения присутствует только падение напряжения, созданное сопротивлениями обмоток возбуждения и якоря постоянному току, в то время как при присоединении к сети переменного напряжения возникает еще значительное индуктивное падение напряжения на обмотках возбуждения и якоря. Кроме этого, при переменном токе при малой скорости якоря имеет место значительный сдвиг фаз между напряжением и током, что резко снижает момент на валу двигателя.
Для получения примерно одинаковых механических характеристик на переменном и постоянном токе включают секционированную обмотку возбуждения двигателя на постоянный ток полностью, а при включении на переменный ток — частично, для чего двигатель присоединяют к соответствующей сети зажимами с обозначениями «+» и » — » или зажимами с обозначениями «
При номинальных режимах, отвечающих питанию от сети постоянного и переменного напряжений, номинальная скорость якоря одинакова. Однако при перегрузке двигателя, присоединенного к сети переменного напряжения, скорость якоря уменьшается сильнее, а при разгрузке возрастает быстрее, чем при работе его от сети постоянного напряжения.
При холостом ходе скорость якоря может превысить номинальную в 2,5 — 4 раза и выше, а это не допустимо из-за значительных центробежных сил, которые могут разрушить якорь. По этой причине режим холостого хода допустим только для двигателей малой номинальной мощности с относительно большими механическими потерями, ограничивающими скорость якоря. Двигатели с незначительными механическими потерями всегда должны нести нагрузку не менее 25% номинальной.
Регулирование скорости якоря осуществляют изменением напряжения на зажимах машины, а также шунтированием обмотки возбуждения или обмотки якоря резистором. Из этих способов полюсное регулирование, осуществляемое параллельным включением обмотки возбуждения регулируемого резистора, является наиболее экономичным.
Основным преимуществом универсальных коллекторных двигателей по сравнению с асинхронными и синхронными двигателями является то, что они развивают значительный начальный пусковой момент благодаря последовательной обмотке возбуждения и позволяют без применения повышающего редуктора получить скорость якоря значительно выше синхронной.
Быстроходность универсальных коллекторных двигателей ограничивает их размеры и массу.
Номинальный к. п. д. этих машин зависит от их номинальной мощности, быстроходности и рода тока. Так, у двигателей номинальной мощностью от 5 до 100 Вт он составляет от 0,25 до 0,55, а в машинах номинальной мощностью до 600 Вт его значение доходит до 0,70 и выше, причем работа двигателей на переменном токе всегда сопровождается пониженным к. п. д., что вызвано повышенными магнитными и электрическими потерями. Номинальный коэффициент мощности этих двигателей составляет 0,70 — 0,90.
Устройство и схема подключения коллекторного двигателя переменного тока
Коллекторные двигатели переменного тока достаточно широко применяются как силовые агрегаты бытовой техники, ручного электроинструмента, электрооборудования автомобилей, систем автоматики. Схема подключения двигателя, а также его устройство напоминают схему и устройство электродвигателя постоянного тока с последовательным возбуждением.
Область применения таких моторов обусловлена их компактностью, малым весом, легкостью управления, сравнительно невысокой стоимостью. Наиболее востребованы в этом производственном сегменте электродвигатели малой мощности с высокой частотой вращения.
- Особенности конструкции и принцип действия
- Упрощенная схема подключения
- Управление работой двигателя
- Преимущества и недостатки
- Типичные неисправности
Особенности конструкции и принцип действия
По сути, коллекторный двигатель представляет собой достаточно специфичное устройство, обладающее всеми достоинствами машины постоянного тока и, в силу этого, обладающее схожими характеристиками. Отличие этих двигателей состоит в том, что корпус статора мотора переменного тока для снижения потерь на вихревые токи выполняется из отдельных листов электротехнической стали. Обмотки возбуждения машины подключаются последовательно для оптимизации работы в бытовой сети 220в.
Могут быть как одно-, так и трехфазными; благодаря способности работать от постоянного и переменного тока называются ещё универсальными. Кроме статора и ротора конструкция включает щеточно-коллекторный механизм и тахогенератор. Вращение ротора в коллекторном электродвигателе возникает в результате взаимодействия тока якоря и магнитного потока обмотки возбуждения. Через щетки ток подается на коллектор, собранный из пластин трапецеидального сечения и является одним из узлов ротора, последовательно соединенного с обмотками статора.
В целом принцип работы коллекторного мотора можно наглядно продемонстрировать с помощью известного со школы опыта с вращением рамки, помещенной между полюсами магнитного поля. Если через рамку протекает ток, она начинает вращаться под действием динамических сил. Направление движения рамки не меняется при изменении направления движения тока в ней.
Последовательное подсоединение обмоток возбуждения дает большой максимальный момент, но появляются большие обороты холостого хода, способные привести к преждевременному выходу механизма из строя.
Упрощенная схема подключения
Типовая схема подключения может предусматривать до десяти выведенных контактов на контактной планке. Ток от фазы L протекает до одной из щеток, затем передается на коллектор и обмотку якоря, после чего проходит вторую щетку и перемычку на обмотки статора и выходит на нейтраль N. Такой способ подключения не предусматривает реверс двигателя вследствие того, что последовательное подсоединение обмоток ведет к одновременной замене полюсов магнитных полей и в результате момент всегда имеет одно направление.
Направление вращения в этом случае можно изменить, только поменяв местами выхода обмоток на контактной планке. Включение двигателя «напрямую» выполняется только с подсоединенными выводами статора и ротора (через щеточно-коллекторный механизм). Вывод половины обмотки используется для включения второй скорости. Следует помнить, что при таком подключении мотор работает на полную мощность с момента включения, поэтому эксплуатировать его можно не более 15 секунд.
Управление работой двигателя
На практике используются двигатели с различными способами регулирования работы. Управление коллекторным мотором может осуществляться с помощью электронной схемы, в которой роль регулирующего элемента выполняет симистор, «пропускающий» заданное напряжение на мотор. Симистор работает, как быстросрабатывающий ключ, на затвор которого приходят управляющие импульсы и открывают его в заданный момент.
В схемах с использованием симистора реализован принцип действия, основанный на двухполупериодном фазовом регулировании, при котором величина подаваемого на мотор напряжения привязана к импульсам, поступающим на управляющий электрод. Частота вращения якоря при этом прямо пропорциональна приложенному к обмоткам напряжению. Принцип работы схемы управления коллекторным двигателем упрощенно описывается следующими пунктами:
- электронная схема подает сигнал на затвор симистора;
- затвор открывается, по обмоткам статора течет ток, придавая вращение якорю М двигателя;
- тахогенератор преобразует в электрические сигналы мгновенные величины частоты вращения, в результате формируется обратная связь с импульсами управления;
- в результате ротор вращается равномерно при любых нагрузках;
- реверс электродвигателя осуществляется с помощью реле R1 и R
Помимо симисторной существует фазоимпульсная тиристорная схема управления.
Преимущества и недостатки
К неоспоримым достоинствам таких машин следует отнести:
- компактные габариты;
- увеличенный пусковой момент; «универсальность» — работа на переменном и постоянном напряжении;
- быстрота и независимость от частоты сети;
- мягкая регулировка оборотов в большом диапазоне с помощью варьирования напряжения питания.
Недостатком этих двигателей принято считать использование щеточно-коллекторного перехода, который обуславливает:
- снижение долговечности механизма;
- искрение между и коллектором и щетками;
- повышенный уровень шумов;
- большое количество элементов коллектора.
Типичные неисправности
Наибольшего внимания к себе требует щеточно-коллекторный механизм, в котором наблюдается искрение даже при работе нового двигателя. Сработанные щетки следует заменить для предотвращения более серьезных неисправностей: перегрева ламелей коллектора, их деформации и отслаивания. Кроме того, может произойти межвитковое замыкание обмоток якоря или статора, в результате которого происходит значительное падение магнитного поля или сильное искрение коллекторно-щеточного перехода.
Избежать преждевременного выхода из строя универсального коллекторного двигателя может грамотная эксплуатация устройства и профессионализм изготовителя в процессе сборки изделия.
Принцип работы коллекторного двигателя
Принцип действия коллекторного электродвигателя (рис.) основан на следующем: если проводник с током — рамку прямоугольной формы, имеющую ось вращения, — поместить между полюсами постоянного магнита (или электромагнита), то эта рамка начнет вращаться. Направление вращения будет зависеть от направления тока в рамке. Ток в рамку от источника постоянного тока может подаваться через контакты-полукольца, прикрепленные к концам рамки, и через упругие скользящие контакты — щетки (рис, а). Отметим, что вращающаяся часть электродвигателя называется якорем, а неподвижная — статором.
Контакты-полукольца обеспечивают переключение тока в рамке через каждые пол-оборота, т. е. непрерывное вращение рамки в одном направлении. У реальных коллекторных двигателей таких рамок много, поэтому вся контактная окружность делится уже не на две, а на большее количество контактов.
Рис.. Коллекторный электродвигатель: а — принцип действия; б — учебный коллекторный двигатель; в — якори учебных коллекторных двигателей; г — якорь реального электродвигателя
Эти контакты образуют коллектор — отсюда и название этого электродвигателя. Контакты коллектора изготовляют из меди, а щетки — из графита. Простейший ремонт электродвигателя заключается в замене щеток, запасной комплект которых часто прилагается при продаже устройств с такими двигателями.
Коллекторные электродвигатели имеют широкое применение
Коллекторные электродвигатели. Они названы по одному из узлов ротора — коллектору (цилиндр, набранный из изолированных пластинок меди, к которому припаяны концы проводов обмотки). С коллектором соприкасаются щетки статора. Коллектор подводит ток к обмотке ротора, последовательно соединенной с обмоткой статора.
Коллекторные электродвигатели отличаются высокой скоростью вращения ротора, поэтому их используют в таких изделиях и машинах, как пылесосы, кухонные машины, и др. Они имеют малые массу и габаритные размеры. Для бытовых машин в основном применяют универсальный встраиваемый коллекторный электрический двигатель.
Коллекторные двигатели, работающие от источника переменного и постоянного тока, называют универсальными. Существуют двигатели для работы на низком напряжении от источников тока. Коллекторные двигатели развивают большие скорости вращения без нагрузки, поэтому их пуск в бытовых машинах чаще всего осуществляется под нагрузкой, для чего приводимые в движение части машины насаживают непосредственно на вал двигателя, например вентилятор у пылесоса.
В процессе эксплуатации коллекторных двигателей проявляются такие их недостатки, как повышенный уровень шума, создание помех радиоприему, искрение и выход из строя угольных щеток, сложность ухода. Такие двигатели являются менее надежными, сложными в производстве и дорогостоящими. Однако они имеют и ряд существенных преимуществ перед асинхронными, благодаря которым и используются в бытовых машинах. Это хорошие пусковые данные, возможность получения больших скоростей вращения (до 25000 об/мин) и плавной регулировки скорости в широких пределах, универсальность.
Эффективность работы двигателя в бытовых приборах зависит от соблюдения требований к режиму работы изделия, который обязательно указывается в эксплуатационном документе. Особенно важно соблюдение этих требований для изделий и машин с кратковременным и повторно-кратковременным режимами работу (фены, миксеры и др.), чтобы исключить перегрев двигателя и выход его из строя.
По способу охлаждения двигатели подразделяются на двигатели с естественным и искусственным охлаждением. Кроме того, необходимо вентилирующее приспособление, особенно независимое, которое следует поддерживать в рабочем состоянии.
Коллекторный двигатель постоянного и переменного тока
В бытовом электрооборудовании, где используются электродвигатели, как правило, устанавливаются электромашины с механической коммутацией. Такой тип двигателей называют коллекторными (далее КД). Предлагаем рассмотреть различные виды таких устройств, их принцип действия и конструктивные особенности. Мы также расскажем о достоинствах и недостатках каждого из них, приведем примеры сферы применения.
Что такое коллекторный двигатель?
Под таким определением подразумевается электромашина, преобразовывающая электроэнергию в механическую, и наоборот. Конструкция устройства предполагает наличие хотя бы одной обмотки подсоединенной к коллектору (см. рис. 1).
Рисунок 1. Коллектор на роторе электродвигателя (отмечен красным)
В КД данный элемент конструкции используется для переключения обмоток и в качестве датчика, позволяющего определить положение якоря (ротора).
Виды КД
Классифицировать данные устройства принято по типу питания, в зависимости от этого различают две группы КД:
- Постоянного тока. Такие машины отличаются высоким пусковым моментом, плавным управлением частоты вращения и относительно простой конструкцией.
- Универсальные. Могут работать как от постоянного, так и переменного источника электроэнергии. Отличаются компактными размерами, невысокой стоимостью и простотой управления.
Первые, делятся на два подвида, в зависимости от организации индуктора он может быть на постоянных магнитах или специальных катушках возбуждения. Они служат для создания магнитного потока, необходимого для образования вращательного момента. КД, где используются катушки возбуждения, различают по типам обмоток, они могут быть:
- независимыми;
- параллельными;
- последовательными;
- смешанными.
Разобравшись с видами, рассмотрим каждый из них.
КД универсального типа
На рисунке ниже представлен внешний вид электромашины данного типа и ее основные элементы конструкции. Данное исполнение характерно практически для всех КД.
Конструкция универсального коллекторного двигателя
Обозначения:
- А – механический коммутатор, его также называют коллектором, его функции были описаны выше.
- В – щеткодержатели, служат для крепления щеток (как правило, из графита), через которые напряжение поступает на обмотки якоря.
- С – Сердечник статора (набирается из пластин, материалом для которых служит электротехническая сталь).
- D – Обмотки статора, данный узел относится к системе возбуждения (индуктору).
- Е – Вал якоря.
У устройств данного типа, возбуждение может быть последовательным и параллельным, но поскольку последний вариант сейчас не производят, мы его не будем рассматривать. Что касается универсальных КД последовательного возбуждения, то типовая схема таких электромашин представлена ниже.
Схема универсального коллекторного двигателя
Универсальный КД может работать от переменного напряжения благодаря тому, что когда происходит смена полярности, ток в обмотках возбуждения и якоря также меняет направление. В результате этого вращательный момент не изменяет своего направления.
Особенности и область применения универсальных КД
Основные недостатки данного устройства проявляются при его подключении к источникам переменного напряжения, что отражается в следующем:
- снижение КПД;
- повышенное искрообразование в щеточно-коллекторном узле, и как следствие, его быстрый износ.
Ранее КД широко применялись, во многих бытовых электроприборах (инструмент, стиральные машины, пылесосы и т.д.). На текущий момент производители практически престали использовать данный тип двигателей отдав предпочтение безколлекторным электромашинам.
Теперь рассмотрим коллекторные электромашины, работающие от источников постоянного напряжения.
КД с индуктором на постоянных магнитах
Конструктивно такие электромашины отличаются от универсальных тем, что вместо катушек возбуждения используются постоянные магниты.
Конструкция коллекторного двигателя на постоянных магнитах и его схема
Этот вид КД получил наибольшее распространение по сравнению с другими электромашинами данного типа. Это объясняется невысокой стоимостью вследствие простоты конструкции, простым управлением скорости вращения (зависит от напряжения) и изменением его направления (достаточно изменить полярность). Мощность двигателя напрямую зависит от напряженности поля, создаваемого постоянными магнитами, что вносит определенные ограничения.
Основная сфера применения – маломощные приводы для различного оборудования, часто используется в детских игрушках.
КД на постоянных магнитах с игрушки времен СССР
К числу преимуществ можно отнести следующие качества:
- высокий момент силы даже на низкой частоте оборотов;
- динамичность управления;
- низкая стоимость.
Основные недостатки:
- малая мощность;
- потеря магнитами своих свойств от перегрева или с течением времени.
Для устранения одного из основных недостатков данных устройств (старения магнитов) в системе возбуждения используются специальные обмотки, перейдем к рассмотрению таких КД.
Независимые и параллельные катушки возбуждения
Первые получили такое название вследствие того, что обмотки индуктора и якоря не подключаются друг к другу и запитываются отдельно (см. А на рис. 6).
Рисунок 6. Схемы КД с независимой (А) и параллельной (В) обмоткой возбуждения
Особенность такого подключения заключается в том, что питание U и UK должны отличаться, в противном случае н возникнет момент силы. Если невозможно организовать такие условия, то катушки якоря и индуктора подключается параллельно (см. В на рис. 6). Оба вида КД обладают одинаковыми характеристиками, мы сочли возможным объединить их в одном разделе.
Момент силы у таких электромашин высокий при низкой частоте вращения и уменьшается при ее увеличении. Характерно, что токи якоря и катушки независимы, а общий ток является суммой токов, проходящих через эти обмотки. В результат этого, при падении тока катушки возбуждения до 0, КД с большой вероятностью выйдет из строя.
Сфера применения таких устройств – силовые установки с мощностью от 3 кВт.
Положительные черты:
- отсутствие постоянных магнитов снимает проблему их выхода из строя с течением времени;
- высокий момент силы на низкой частоте вращения;
- простое и динамичное управление.
Минусы:
- стоимость выше, чем у устройств на постоянных магнитах;
- недопустимость падения тока ниже порогового значения на катушке возбуждения, поскольку это приведет к поломке.
Последовательная катушка возбуждения
Схема такого КД представлена на рисунке ниже.
Схема КД с последовательным возбуждением
Поскольку обмотки включены последовательно, то ток в них будет равным. В результате этого, когда ток в обмотке статора становится меньше, чем номинальный (это происходит при небольшой нагрузке), уменьшается мощность магнитного потока. Соответственно, когда нагрузка увеличивается, пропорционально увеличивается мощность потока, вплоть до полного насыщения магнитной системы, после чего эта зависимость нарушается. То есть, в дальнейшем рост тока в обмотке катушки якоря не приводит к увеличению магнитного потока.
Указанная выше особенность проявляется в том, что КД данного типа непозволительно запускать при нагрузке на четверть меньше номинальной. Это может привести к тому, что ротор электромашины резко увеличит частоту вращения, то есть, двигатель пойдет «в разнос». Соответственно, такая особенность вносит ограничения на сферу применения, например, в механизмах с ременной передачей. Это связано с тем, что при ее обрыве электромашина начинает работать в холостом режиме.
Указанная особенность не распространяется на устройства, чья мощность менее 200 Вт, для них допустимы падения нагрузки вплоть до холостого режима работы.
Преимущества КД с последовательной катушкой, такие же, как у предыдущей модели, за исключением простоты и динамичности управления. Что касается минусов, то к ним следует отнести:
- высокую стоимость в сравнении с аналогами на постоянных магнитах;
- низкий уровень момента силы при высокой частоте оборотов;
- поскольку обмотки статора и возбуждения подключены последовательно, возникают проблемы с управлением скоростью вращения;
- работа без нагрузки приводит к поломке КД.
Смешанные катушки возбуждения
Как видно из схемы, представленной на рисунке ниже, индуктор на КД данного типа обладает двумя катушками, подключенных последовательно и параллельно обмотке ротора.
Схема КД со смешанными катушками возбуждения
Как правило, одна из катушек обладает большей намагничивающей силой, поэтому она считается, как основная, соответственно, вторая – дополнительная (вспомогательная). Допускается встречное и согласованное включение катушек, в зависимости от этого интенсивность магнитного потока соответствует разности или сумме магнитных сил каждой обмотки.
При встречном включении характеристики КД становятся близкими к соответствующим показателям электромашин с последовательным или параллельным возбуждением (в зависимости от того, какая из катушек является основной). То есть, такое включение актуально, если необходимо получить результат в виде неизменной частоты оборотов или их увеличению при возрастании нагрузки.
Согласованное включение приводит к тому, что характеристики КД будут соответствовать среднему значению показателями электромашин с параллельными и последовательными катушками возбуждения.
Единственный недостаток такой конструкции – самая высокая стоимость в сравнении с другими типами КД. Цена оправдывается благодаря следующими положительными качествами:
- не устаревают магниты, за отсутствием таковых;
- малая вероятность выхода из строя при нештатных режимах работы;
- высокий момент силы на низкой частоте вращения;
- простое и динамичное управление.
Коллекторный двигатель: Устройство, виды и принцип работы
Большое количество оборудования имеет силовые установки, работающие от электрической сети питания. Коллекторный двигатель это силовая установка, преобразующая электрическую энергию в физическую силу. Отличие коллекторного двигателя от бесколлекторного состоит в наличии коллекторно-щеточного узла.
Виды коллекторных двигателей
В зависимости от источника тока, к которому подключается мотор, коллекторные установки делят на два вида:
- Работающий от источника постоянного тока. Используются в автомобилях, самоходной технике, детских игрушках и т.д. Отличаются простотой конструкции. Подключаются только к источнику постоянного тока;
- Универсальный коллекторный двигатель. Работает как от постоянного, так и от переменного тока. Применяется в бытовых электрических приборах.
СПРАВКА: Универсальный коллекторный силовой агрегат отличается простотой конструкции и небольшими габаритно массовыми параметрами. Благодаря этому может быть использован в качестве силовой установки ручного инструмента.
В зависимости от максимальной мощности силовые установки делятся на три типа:
- Небольшой мощности. Используются в детских игрушках, аудио – видеотехнике и т.д. Напряжение питания таких установок составляет от 1.5 до 9 Вольт. Оси якоря устанавливаются на специализированные втулки. Они играют роль подшипников скольжения. Токопроводящие щетки выполнены в виде двух пластин;
- Средней мощности. Якорь устанавливается на втулках или подшипниках. Применяются на автомобильной и самоходной технике. Напряжение питания составляет от 12 до 24 вольта;
- Высокой мощности. Отличаются высокими показателями мощности и наличием электрических магнитов.
Устройство коллекторного двигателя
Для того чтобы понять как работает коллекторный двигатель, необходимо разобраться в его конструкции. Независимо от вида силового агрегата он состоит из следующих основных элементов:
- Якорь. Состоит из металлического вала, на который установлены обмотки. Вал устанавливается на подшипниках скольжения или качения в корпусе мотора. Якорь является движущейся частью мотора, которая передаёт крутящий момент к необходимому оборудованию;
- Коммутатор (коллектор). Необходим для определения положения якоря. Располагается на роторе. Выполнен в виде медных контактов трапециевидного сечения;
- Щётки. Изготовлены из графита. Щетки используются для подачи напряжения к обмоткам ротора;
- Держатели щёток. Изготавливаются из металла или пластика. Держатели щёток устанавливаются на корпус мотора при помощи не проводящих ток прокладок. Такая конструкция исключает подачу напряжения на корпус мотора;
ВАЖНО: Щётки или держатели оснащаются пружинами. Они необходимы для прижимания щетки к коллектору во время работы силовой установки.
- Подшипники. На небольших моторах используются пластиковые или металлические втулки. Мотор оборудован двумя подшипниками. Они необходимы для нормального вращения вала якоря;
- Сердечник статора. Изготавливается из большого количества металлических пластин;
- Обмотки. Необходимы для создания магнитного поля.
Принцип работы коллекторного двигателя
Коллекторный двигатель переменного тока 220 Вольт и мотор постоянного тока, преобразуют электрическую энергию в физическую силу. Создание физической силы осуществляется путём раскручивания якоря, установленного на двух подшипниках в корпусе мотора.
Ротор и статор силового агрегата имеют обмотки. Они изготовлены из провода. Во избежание замыкание витков обмотки между собой провод выполнен в изолирующей оболочке. Напряжение подается на обмотку статора при помощи провода.
Якорь коллекторного мотора подвижный. Для передачи напряжения на обмотку якоря используется коллектор.
Он выполнен в виде медных контактов. На них передаётся напряжение через графитовые щетки. Такая конструкция позволяет передавать напряжение на обмотку якоря независимо от скорости его вращения.
При прохождении электрического тока через обмотки возникает магнитное поле. Обмотка якоря имеет магнитное поле противоположной полярности полю обмотки статора. Под воздействием электромагнитных полей разной полярности якорь двигателя начинает вращаться.
ВНИМАНИЕ: Коллекторный двигатель может быть использован в качестве генератора постоянного тока.
Варианты обмоток возбуждения
Подключить коллекторный двигатель постоянного тока можно несколькими способами. Возбуждение мотора зависит от способа подключения обмоток.
- Независимое подключение. Обмотки мотора постоянного тока подключаются отдельно. Для подключения используется два источника постоянного тока. Обмотка статора оснащается реостатом. Он необходим для установки необходимой частоты вращения ротора. Обмотка ротора оборудуется пусковым реостатом. Он нужен для контроля над силой тока в обмотке ротора при запуске силовой установки;
- Параллельное подключение. Питание обмоток якоря и статора осуществляется от одного и того же источника питания. Обмотки оснащены регуляторами;
- Последовательно-соединенное. Электродвигатель такой конструкции имеет обмотку статора, последовательно подключенную с обмоткой якоря. Ротор может быть оснащен регулятором, необходимым для ограничения силы тока при запуске. Статор оснащается реостатом, регулирующим в частоту вращения вала.
ВАЖНО: Использование коллекторного мотора с последовательным подключением без нагрузки, может привести к выходу его из строя.
- Смешанное возбуждение. Данная конструкция использует две катушки подключенные параллельно, и последовательно одновременно.
Преимущества и недостатки коллекторного двигателя
Однофазный коллекторный двигатель переменного тока или аналогичный работающий от источника постоянного тока имеют плюсы и минусы.
- Однофазный мотор коллекторного типа ( универсальный), можно подключить к любой сети питания. Такая конструкция позволяет использовать мотор от источника питания переменного тока, без использования выпрямителей;
- В отличие от бесколлекторных двигателей, модели с коллекторами имеют небольшие размеры. Это позволяет использовать силовые установки для монтажа на электрический инструмент, детские игрушки, и т.п;
Ремонт электродвигателей переменного тока — диагностика, сервис
Ремонт электродвигателей переменного тока
На сегодняшний день электродвигатели переменного тока получили большее распространение в сравнении с двигателями постоянного тока. Это обусловлено их надежностью, простотой эксплуатации относительно низкой стоимостью.
Данный тип двигателей используется в быту, во многих коммунальных хозяйствах и на различных промышленных объектах по всей стране.
Основные причины поломки электродвигателей
Нередко двигатели выходят из строя. При этом неполадки могут проявиться внезапно. Причины этого могут быть различны. К поломке могут привести такие факторы как:
- длительная работа с сильными перегрузками
- воздействие влаги
- повышенная температура окружающей среды
- нестабильное напряжение в электрической сети
Самостоятельный ремонт таких агрегатов не представляется возможным, поскольку для его осуществления необходима специальная аппаратура. Поэтому обслуживание двигателя необходимо доверить профессионалам.
Диагностика электродвигателей переменного тока
Чтобы определить точную причину неполадок специалисты осуществляют диагностику с применением современной высокочастотной аппаратуры по самым передовым методикам. В большинстве случаев обнаруживаются повреждения фазовых роторов. Для их устранения требуется замена обмотки на новую.
Неисправности обмотки нередко бывают причиной неполадок статора. В некоторых случаях требуется полная замена обмотки или статора электродвигателя. Для этого новые детали изготавливаются индивидуально из новых проводов высокого качества. Возможна также замена паяной или сваренной обмотки.
Наиболее часто встречающейся механической неисправностью является разбалансировка роторов, однако эта неисправность легко исправима. Чаще всего разбалансировка устраняется даже без замены подшипников. Однако нередко требуется проведение ремонтных работ в подшипниковом узле.
При длительной эксплуатации двигателя возможен износ подшипников или посадочных мест, для которых также необходим ремонт.
Основные виды ремонта электродвигателей
- Срочный – производится при внезапном выходе аппарата из строя. При этом производится деталей и узлов, в которых возникла неполадка.
- Периодический – осуществляется с целью профилактики возникновения поломок. При этом производится тщательный осмотр электродвигателя с его частичной разборкой. Производится чистка и наладка деталей, после которых аппарат подвергается испытаниям, предусмотренным нормативно-технической документацией, с целью проверки параметров двигателя.
- Капитальный – необходим после определенного срока эксплуатации. При этом производится замена изношенных элементов и осуществляются испытания для проверки характеристик.
Профессиональный ремонт электродвигателей
Ремонт электродвигателя является трудоемкой и сложной работой, поэтому доверять его проведение стоит только квалифицированным специалистам. При совершении ошибок при техническом обслуживании электродвигателя возможна его поломка, получение персоналом производственных травм различной степени тяжести или возникновение пожароопасной ситуации.
Специалист, занимающийся ремонтом электродвигателей, должен иметь большой опыт работы и владеть навыками по использованию необходимой аппаратуры.
После любого ремонта электродвигатель проходит испытания, при которых проверяются его важнейшие функции, соответствие характеристик нормам, описанным в технической документации, соответствие аппарата отечественным и международным стандартам. Данная процедура позволяет оценить качество ремонта, провести дополнительную диагностику и обнаружить ранее не замеченные неполадки.
Электрические машины постоянного и переменного тока — Физика — Каталог статей
«Электрические машины постоянного и переменного тока»
Производство электроэнергии является достаточно легким процессом, а электродвигатели могут служить для различных целей — от бурения скважин до обеспечения движения поездов.
(Облака — естественные генераторы электричества. В результате внутреннего трения облака могут наэлектризоваться. В итоге изоляция воздуха может нарушиться, что приведет к электрическому разряду, направленному к земле в виде гигантских искр — молний.)
Введение
Материя состоит из атомов, которые, в свою очередь, складываются из электрически заряженных частиц — протонов и электронов. Еще древние греки знали, что если потереть янтарь кусочком ткани, он будет притягивать легкие предметы, но не понимали причину происходящего. На самом деле в результате трения возникало электричество . Обычно в любом веществе находится равное количество отрицательно и положительно заряженных частиц. Поэтому их электрические заряды уравновешены, а вещество нейтрально. Однако в результате трения некоторые электроны перемещаются с одного материала на другой. Как следствие, нарушается равновесие зарядов: материал, притянувший электроны, становится отрицательно заряженным, а материал, отдавший их — положительно заряженным.
(В машине Уимсхерта металлические пластины на вращающихся стеклянных дисках заряжаются электростатической индукцией, что в итоге приводит к искрению.)
Заряженные предметы
Термины «электрон» и «электричество» произошли от греческого словаelektron, означающего «янтарь». Хотя греки сделали важный шаг в направлении крупного открытия, первая машина, способная вырабатывать электричество, была изобретена лишь ок. 1650 г. в Германии. Отто фон Герике создал простую машину, включавшую большой шар из серы. При касании рукой шара, насаженного на вал и вращаемого с помощью ручки, тот заряжался в результате трения. К 21 в. были изобретены многие подобные фрикционные генераторы. В основе работы другого типа генератора лежал принцип электромагнитной индукции — процесса, при котором предмет заряжается от находящегося поблизости другого заряженного предмета. Такие асинхронные генераторы накапливают индуцированные заряды для получения высокого напряжения. Подобная машина, изобретенная Джеймсом Уимсхерстом в 1883 г., по-прежнему используется в лабораторных опытах для получения напряжения до 50000 вольт, а иногда и выше.
(Ток, индуцированный в роторе короткозамкнутого электродвигателя, намагничивает его и заставляет поворачиваться вместе с окружающим его вращающимся полем.)
Мощные электромашины
В 1931 г. Ван-де-Грааф изобрел электростатический генератор широкого практического применения. Движущаяся лента из диэлектрика передает на металлический шар заряд, постепенно увеличивающийся до нескольких миллионов вольт. Генератор Ван-де-Граафа используется при испытаниях изоляторов и другого оборудования, рассчитанного на высокие напряжения, а также в ядерных исследованиях, при этом высокое напряжение служит для разгона заряженных субатомных частиц. Хотя фрикционные и асинхронные машины могли создавать высокое напряжение, они не годились для выработки сильного постоянного тока. Данная проблема была решена в конце 1790-х гг., когда итальянский ученый Алессандро Вольта изобрел первую батарею . Впоследствии она была усовершенствована, что позволило, начиная с конца XIX в., использовать электричество для освещения .Хотя батареи являются удобным и многоцелевым источником электроэнергии, они постепенно разряжаются и нуждаются в замене или подзарядке. Эксперименты, проведенные в начале XIX в., привели к созданию современных генераторов.
(Синхронный двигатель, создающий вращающиеся магнитное поле, за которым следует ротор — как один магнит следует за другим.)
Эрстед и Ампер
В 1819 г. датский профессор Ханс Эрстед сделал открытие: текущий по проводу электрический ток заставлял отклоняться стрелку магнитного компаса. Так Эрстед открыл явление электромагнетизма — магнетизма, создаваемого электричеством. В 1821 г. французский ученый Андре Ампер продемонстрировал связанное с этим механическое взаимодействие токов: при пропускании электрического тока через провод, находящийся рядом с мощным магнитом, наблюдалось перемещение провода, — и установил закон этого взаимодействия. Этот принцип лежит в основе электрического двигателя: преобразование электрической энергии в механическую. Опыты Ампера были чрезвычайно интересны, но не имели практического применения. Провод просто немного сдвигался при появлении тока. Но в том же году английский ученый Майкл Фарадей создал машину, которая с помощью электричества обеспечивала длительное движение. Нижний конец подвешенного провода помещался в сосуд с ртутью, в центре которого находился стержневой магнит. При подключении батареи между верхним концом провода и ртутью провод начинал вращаться вокруг магнита.
(У линейного, как и у асинхронного двигателя, статор открыт и вытянут в линию. Здесь вместо вращения ротора металлическая пластина перемещается вдоль этой линии непосредственно над магнитным полем.)
Электромагнитная индукция
Открытое Фарадеем явление электромагнитной индукции, названное им «электрическим вращением », легло в основу принципа работы современных электродвигателей. Первый электродвигатель, нашедший практическое применение, был изобретенизобретен в 1837 г. американским инженеромТомасом Давенпортом. Он использовал два таких двигателя: для работы сверлильного и деревообрабатывающего станков.
Имитация привода двигателя переменного тока — MATLAB и Simulink — MathWorks India
Simulate an AC Motor Drive
Чтобы использовать модели приводов переменного тока библиотеки Electric Drives, вы сначала указываете типы двигатели, преобразователи и контроллеры, используемые в шести моделях приводов переменного тока библиотеки обозначены от AC1 до AC6. Модели AC1, AC2, AC3 и AC4 основаны на трехфазном Индукционный двигатель. Этот двигатель имеет трехфазную обмотку на статоре и намотанный ротор или ротор с короткозамкнутым ротором.Ротор с короткозамкнутым ротором состоит из пазов токопроводящих стержней. встроен в железный ротор. Проводящие шины закорочены вместе на каждом конце. ротора токопроводящими кольцами. Модель AC5 основана на синхронном роторе с фазным ротором. двигатель, а в модели AC6 используется синхронный двигатель с постоянными магнитами. Эти двигатели переменного тока питается переменным напряжением переменного тока и частотой, создаваемыми инвертором. Тип инвертора в шести моделях приводов переменного тока используется инвертор источника напряжения (VSI) в том смысле, что этот инвертор питается постоянным напряжением постоянного тока.Это постоянное напряжение обеспечивается неуправляемый диодный выпрямитель и конденсатор (емкостное напряжение шины постоянного тока).
Динамическое торможение
Когда шина постоянного тока обеспечивается диодным выпрямителем, привод не имеет возможности двунаправленного потока мощности и поэтому не может выполнить рекуперативное торможение. В моделях AC1, AC2, AC3, AC4 и AC6 тормозной резистор, включенный последовательно с прерывателем, обеспечивает торможение моторно-нагрузочная система. Эта схема торможения называется динамическим торможением.Он размещен параллельно шине постоянного тока, чтобы предотвратить ее напряжение. от увеличения при замедлении двигателя. С динамическим торможением, кинетическая энергия системы двигатель-нагрузка преобразуется в тепло рассеивается в тормозном резисторе.
Методы модуляции
Инверторы VSI, используемые в моделях приводов переменного тока библиотеки, основаны на по двум типам модуляции, гистерезисной модуляции и пространственному вектору широтно-импульсная модуляция (ШИМ).
Гистерезисная модуляция — это метод управления током с обратной связью, при котором ток двигателя отслеживает задание. ток в диапазоне гистерезиса.На следующем рисунке показана операция принцип гистерезисной модуляции. Контроллер генерирует синусоидальный опорный ток требуемой величины и частоты, который сравнивается с фактическим током в сети двигателя. Если ток превышает верхний предел полосы гистерезиса, верхний переключатель инвертора рука выключена, а нижний переключатель включен. В следствии, ток начинает затухать. Если ток пересекает нижнюю границу полосы гистерезиса, нижний переключатель плеча инвертора поворачивается выключен, а верхний переключатель включен.В результате ток становится обратно в полосу гистерезиса. Следовательно, фактический ток принудительно для отслеживания эталонного тока в диапазоне гистерезиса.
На следующем рисунке показана схема модуляции гистерезисного регулирования тока, состоящая из трех гистерезисные компараторы, по одному на каждую фазу. Этот тип ШИМ с обратной связью используется в Модели AC3 и AC5.
Модуляция пространственного вектора техника отличается от гистерезисной модуляции тем, что не используются отдельные компараторы для каждой из трех фаз.Вместо, опорное напряжение пространственного вектора V сек есть производится как единое целое, дискретизируется с фиксированной частотой, а затем создается за счет адекватной синхронизации соседнего ненулевого пространства напряжения инвертора векторы В 1 до В 6 и векторы пространства нулевого напряжения В 0 , В 7 . Упрощенная схема инвертора VSI показана ниже. На этой диаграмме состояние проводимости трех ветвей инвертора представлено тремя логическими переменными SA, SB и SC.Логическая 1 означает, что Верхний переключатель является проводящим, а логический 0 означает, что нижний переключатель проводит.
Упрощенная схема инвертора VSI PWM
На этой диаграмме показано состояние проводимости трех ножек инвертор представлен тремя логическими переменными: SA, SB и SC. Логическая 1 означает, что верхний переключатель включен, а логический 0 означает что нижний переключатель включен.
Переключение SA, SB, SC приводит к восьми состояниям инвертора. Состояния переключения и соответствующие напряжения между фазами и нейтралью приведены в таблице, в которой перечислены состояний, операций инвертора и векторов пространственного напряжения.Шесть активных векторов: под углом 60 градусов и описывают границу шестиугольника. Два нулевых вектора находятся у истока.
В качестве примера для расположения вектора V s показано на схеме пространственно-векторного напряжения инвертора, способ генерации выход инвертора должен использовать соседние векторы В 1 и В 2 на неполной ставке для удовлетворения средний спрос на выпуск продукции.Напряжение В с может быть разрешено как:
V a и V b являются компоненты V s вдоль V 1 и V 2 , соответственно. Учитывая период T c в течение которой средний результат должен соответствовать команде, напишите длительность времени двух состояний 1 и 2 и состояния нулевого напряжения как:
|
Государство |
SA |
SB |
SC |
Работа инвертора |
Вектор космического напряжения |
|---|---|---|---|---|---|
|
0 |
1 |
1 |
1 |
Freewheeling |
В 0 |
|
1 |
1 |
0 |
0 |
Активный |
В 1 |
|
2 |
1 |
1 |
0 |
Активный |
В 2 |
|
3 |
0 |
1 |
0 |
Активный |
В 3 |
|
4 |
0 |
1 |
1 |
Активный |
В 4 |
|
5 |
0 |
0 |
1 |
Активный |
В 5 |
|
6 |
1 |
0 |
1 |
Активный |
В 6 |
|
7 |
0 |
0 |
0 |
Freewheeling |
В 7 |
Управление напряжением / частотой разомкнутого контура
Поток статора машины переменного тока равен отношению напряжения статора к частоте, потому что
, где
, следовательно,
Поскольку на двигатель подается переменное напряжение и частота переменного тока, важно поддерживать постоянное значение В / Гц в области постоянного крутящего момента, если магнитное насыщение следует избегать.Типичная характеристика В / Гц показана ниже. Обратите внимание, что прямая линия имеет небольшое повышение напряжения, чтобы компенсировать падение сопротивления на низкой частоте. Управление В / Гц без обратной связи используется в приложениях с низкой динамикой, таких как как насосы или вентиляторы, где допускается небольшое изменение скорости двигателя в зависимости от нагрузки. В Модель AC1 основана на регуляторе В / Гц без обратной связи.
Управление скоростью с обратной связью с компенсацией скольжения
В этом типе управления команда скорости скольжения добавляется к измеренной скорости ротора для получения желаемая частота инвертора.Регулятор скорости на основе PI производит скольжение команда. Требуемая частота инвертора генерирует команду напряжения через В / Гц. характеристика, подобная показанной выше. Модель AC2 основана на замкнутом контуре регулирование скорости, использующее регулировку В / Гц и скольжение.
Flux-Oriented Control
Конструкция машины постоянного тока такова, что поток поля перпендикулярна потоку якоря. Будучи ортогональными, эти два потоки не производят сетевого взаимодействия друг с другом.Регулировка поля поэтому ток может управлять потоком машины постоянного тока, а крутящий момент можно управлять независимо от магнитного потока, регулируя якорь текущий. Машина переменного тока не так проста из-за взаимодействия между полями статора и ротора, ориентация которых не удерживается под углом 90 градусов, но зависит от условий эксплуатации. Вы можете получить характеристики машины постоянного тока при удерживании фиксированного и ортогонального ориентация между полем и полем якоря в машине переменного тока ориентируя ток статора относительно потока ротора так, чтобы для достижения независимо контролируемых магнитного потока и крутящего момента.Такой контроль Схема называется потоковым управлением или векторным управлением. Векторное управление применимо как к асинхронным, так и к синхронным двигателям. Посмотрим Теперь как это применимо к асинхронным двигателям.
Учитывая модель d-q индукционной машины в справочнике рама, вращающаяся с синхронной скоростью ω e ,
, где
Полевое управление подразумевает, что компонент i ds тока статора будет выровнено с полем ротора и компонентом i qs будет перпендикулярно i ds .Этого можно добиться, выбрав ω e на быть скорость потока ротора и фиксации фазы ссылки рамная система, так что поток ротора точно совпадает с d, что приводит к
и
, что означает
и
Отсюда также следует, что
Аналогия с производительностью машины постоянного тока теперь очевидна. Электрический крутящий момент пропорционален компоненту i qs , тогда как соотношение между потоком φ r и компонент i ds предоставляется линейной передаточной функцией первого порядка с постоянной времени L r / R r .
Вы не можете напрямую измерить ориентацию потока ротора в индукционная машина с короткозамкнутым ротором. Это можно оценить только из терминальные измерения. Альтернативный способ — использовать отношение скольжения полученное выше, чтобы оценить положение потока относительно ротора, как показано. Последняя схема управления называется косвенной полевой ориентацией. управление и используется в модели AC3.
Прямое управление крутящим моментом
Полеориентированное управление — привлекательный метод управления, но у него есть серьезный недостаток: в значительной степени полагается на точное знание параметров двигателя.Постоянная времени ротора особенно трудно измерить точно, и он зависит от температура.
Более надежный метод управления состоит в первую очередь в оценке магнитного потока статора машины и электрического крутящий момент в неподвижной системе отсчета из измерений терминала. Следующее используются соотношения:
Затем контролируются расчетный поток статора и электрический крутящий момент. напрямую сравнивая их с соответствующими требуемыми значениями, используя гистерезисные компараторы.Затем выходы двух компараторов используются в качестве входных сигналов оптимальной таблицы переключения. Следующее таблица выводит соответствующее состояние переключения для инвертора.
Таблица переключения пространственных векторов инвертора
|
|
| S (1) | S (1) | S (3) | S (4) | S (5) | S (6) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 4 9002 900 | V 3 | V 4 | V 5 | V 6 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 0 | V 0 | V 7 | В 0 | В 7 | В 0 | В 7 | 9134 В 6 | В 1 | В 2 | В 3 | В 4 | В 4 В 5 | ||||||||||||||||||||||||||||||||||||||||||||||||||
| -1 | 1 | В 3 | В 4 | В 6 | В 1 | В наличии 0 | V 7 | V 0 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
| -1 | V 5 | V 1 | V 2 | V 3 | V 4 | V 4 Привод двигателя
| Привод Входное напряжение | Амплитуда | 460 В | |||||||||||||||||||||||||||||||||||||||||||||||||
| Частота | 60 Гц | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Двигатель Номинальные значения | Мощность | 200 л. значения амплитуды и частоты напряжения до 460 В и 60 Гц соответственно. Установите значение среднеквадратичного межфазного напряжения источника переменного тока на
460 В, а частота до 60 Гц. Назовите источник переменного тока Чтобы представить реальный трехфазный источник, необходимо указать правильный сопротивление источника R и индуктивность L значения. Процедура определения этих Значения описаны в примере «Подключение модели DC3 к источнику напряжения».Следующий с помощью этой процедуры вы определяете значение сопротивления 0,0056 Ом и значение индуктивности 0,15 мГн. Установите значение сопротивления источника переменного тока на 0,0056 Ом и индуктивность до 0,15 мГн. Подключение модели AC4 к механической нагрузкеВход Tm блока AC4 представляет крутящий момент нагрузки приложен к валу асинхронного двигателя.В этом случае момент нагрузки равен против фаната. Этот тип крутящего момента обычно является квадратичной функцией скорость, как показано в уравнении 1:
, где ω м — скорость в рад / с и Н м — скорость в об / мин.
Определение уставкиТеперь определите вход уставки (SP) AC4. В этом примере индукция крутящий момент двигателя контролируется, и устанавливается серия уставок крутящего момента. А ряд уставок может быть определен с помощью блока Stair Generator.
|
