Как устроен шаговый двигатель. Какие бывают типы шаговых двигателей. Как правильно подключить шаговый двигатель. Какие существуют схемы управления шаговыми двигателями. Как работает контроллер шагового двигателя. Как сделать простой драйвер шагового двигателя своими руками.
Устройство и принцип работы шагового двигателя
Шаговый двигатель — это электромеханическое устройство, преобразующее электрические импульсы в дискретные механические перемещения. Основными компонентами шагового двигателя являются:
- Статор с обмотками
- Ротор с постоянными магнитами или зубчатой структурой
- Корпус
- Подшипники
- Вал
Принцип работы шагового двигателя основан на взаимодействии магнитных полей статора и ротора. При подаче тока на обмотки статора создается магнитное поле, которое взаимодействует с полем ротора, вызывая его поворот на определенный угол (шаг).
Типы шаговых двигателей
Существует несколько основных типов шаговых двигателей:

1. С переменным магнитным сопротивлением (VR)
Особенности:
- Ротор из магнитомягкого материала с зубцами
- Отсутствие остаточного момента
- Простая конструкция
- Низкая стоимость
2. С постоянными магнитами (PM)
Характеристики:
- Ротор с постоянными магнитами
- Наличие остаточного момента
- Больший крутящий момент по сравнению с VR
3. Гибридные (HB)
Преимущества:
- Сочетание особенностей VR и PM двигателей
- Высокая точность позиционирования
- Высокий крутящий момент
- Малый шаговый угол (обычно 1.8° или 0.9°)
Распиновка и подключение шагового двигателя
Правильное подключение шагового двигателя критически важно для его корректной работы. Распиновка зависит от типа двигателя:
Биполярные двигатели (4 вывода)
Имеют две обмотки без центральных отводов. Схема подключения:
- A+ и A-: первая обмотка
- B+ и B-: вторая обмотка
Униполярные двигатели (5 или 6 выводов)
Имеют обмотки с центральными отводами. Схема подключения:- A, C: концы первой обмотки
- B, D: концы второй обмотки
- E (и F для 6-выводных): общий провод (центральный отвод)
8-выводные двигатели
Предоставляют наибольшую гибкость в подключении. Могут быть соединены как биполярные или униполярные. Схема подключения зависит от желаемой конфигурации.

Схемы управления шаговыми двигателями
Существует несколько основных схем управления шаговыми двигателями:
1. Полношаговый режим
В этом режиме ротор перемещается на один полный шаг за каждый такт управления. Обеспечивает максимальный крутящий момент, но может вызывать вибрации на низких скоростях.
2. Полушаговый режим
Ротор перемещается на половину шага за такт. Это позволяет увеличить точность позиционирования и снизить вибрации, но уменьшает крутящий момент.
3. Микрошаговый режим
Контроллеры шаговых двигателей
Контроллер шагового двигателя — это электронное устройство, управляющее работой двигателя. Основные функции контроллера:
- Формирование управляющих сигналов для обмоток двигателя
- Регулирование тока в обмотках
- Реализация различных режимов работы (полный шаг, полушаг, микрошаг)
- Обеспечение защиты от перегрузок и коротких замыканий
Современные контроллеры часто интегрируются с микропроцессорами, что позволяет реализовать сложные алгоритмы управления и обеспечить связь с другими устройствами.

Как сделать простой драйвер шагового двигателя своими руками
Для создания простого драйвера шагового двигателя потребуются следующие компоненты:
- Микроконтроллер (например, Arduino)
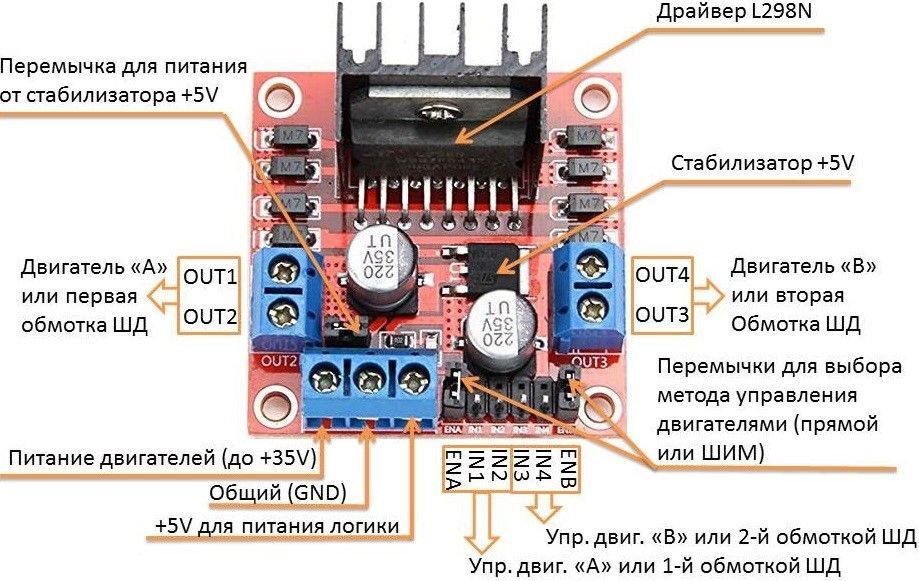
- H-мост (например, L298N)
- Резисторы и конденсаторы
- Источник питания
Алгоритм сборки:
- Подключите H-мост к микроконтроллеру
- Соедините выходы H-моста с обмотками двигателя
- Напишите программу управления для микроконтроллера
- Протестируйте работу драйвера
Важно помнить о необходимости обеспечения достаточного охлаждения компонентов и защиты от перегрузок.
Применение шаговых двигателей
Шаговые двигатели широко используются в различных областях техники и промышленности:
- 3D-принтеры и ЧПУ-станки
- Робототехника
- Автоматизированные системы
- Медицинское оборудование
- Аэрокосмическая отрасль
Их популярность обусловлена высокой точностью позиционирования, простотой управления и надежностью.
Преимущества и недостатки шаговых двигателей
Шаговые двигатели обладают рядом преимуществ:
- Простота управления
- Возможность работы в открытом контуре управления
- Высокий крутящий момент на низких скоростях
Однако у них есть и недостатки:

- Возможность пропуска шагов при перегрузке
- Снижение крутящего момента с увеличением скорости
- Повышенное энергопотребление в режиме удержания позиции
- Возможность возникновения резонансных явлений
Понимание этих особенностей позволяет эффективно использовать шаговые двигатели в различных приложениях.
устройство, принцип работы, типы, схемы подключения
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.

К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
Рис. 1. Принцип действия шагового двигателяНа рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
С постоянным магнитомГибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
Расположение пазов гибридникаИз-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
Униполярный ШДДля использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Схема а) с различными, б) с одним выводомБиполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата.
При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
Схемы подключения различных типов шаговых двигателейПри условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.

- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Полношаговое управлениеПолушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
Полушаговое управлениеДля более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами.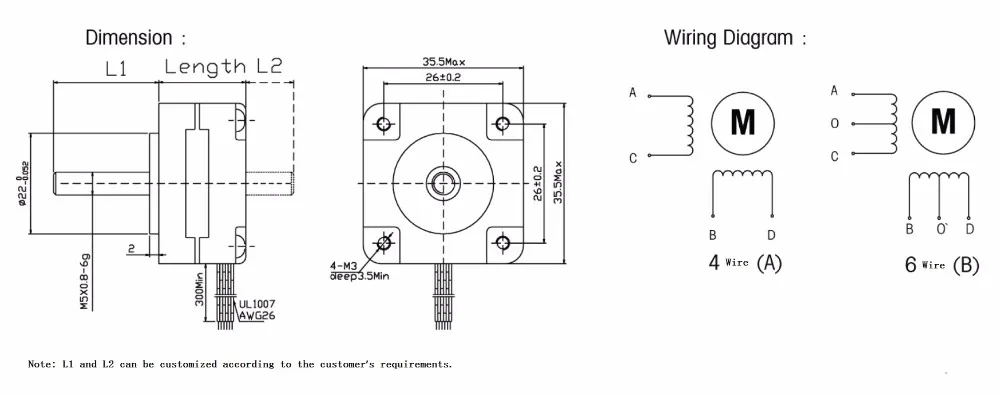
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-мостаКак видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Популярные схемы управления ШД
Схема управления от контроллера с дифференциальным выходомЯвляется одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
Схема управления от контроллера с выходом типа «открытый коллектор»В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Полезное видео
Схемы управления шаговыми двигателями
- 6-ти выводные шаговые двигатели
- 8-ми выводные шаговые двигатели
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным. Поэтому наибольший практический интерес у новичков вызывает именно схема управления биполярным шаговым двигателем.
Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя?
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.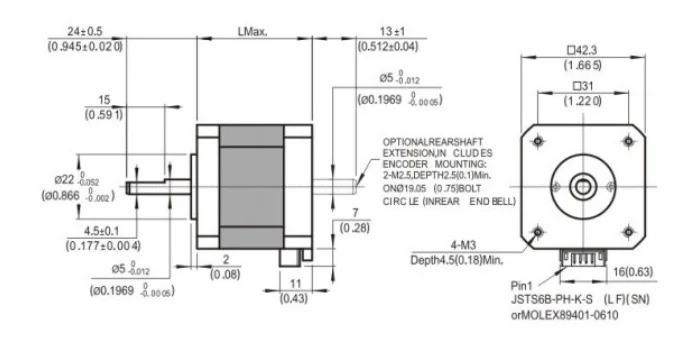
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр.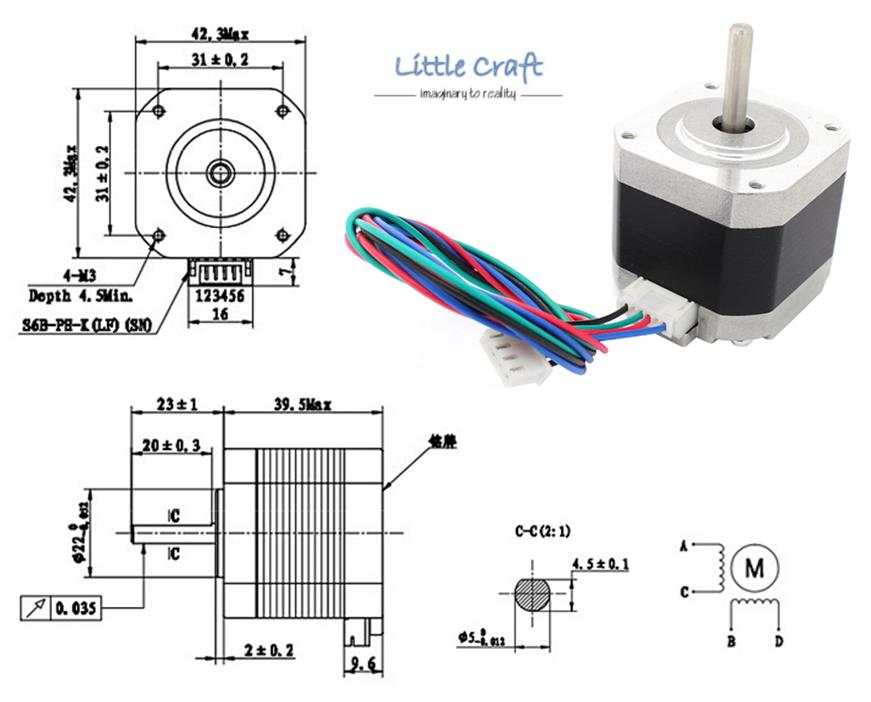 = 1.4 * Tуниполяр.
= 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.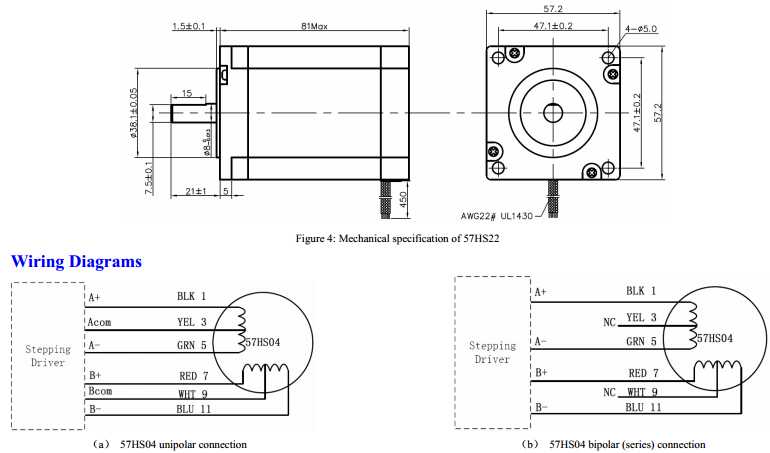
Униполярное подключение шагового двигателя (схема электрическая)
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное последовательное подключение шагового двигателя (схема электрическая)
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
= 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Биполярное параллельное подключение шагового двигателя (схема электрическая)
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 1.4 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр.. = 0.5 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр.. = 4 * Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Пример: параметры ШД FL60STH86-2008AF для различных подключений
| Параметр | униполярное | параллельное | последовательное |
|---|---|---|---|
| Ток/ фаза, А | 2 |
2. 8 8 |
1.4 |
| Сопротивление обмотки, Ом | 1.5 | 0.75 | 3 |
| Индуктивность обмотки, мГн | 3 | 1.5 | 6 |
| Крутящий момент, кг×см | 22 кг х см | 31 кг х см | 31 кг х см |
| Преимущества / недостатки | Средний момент при среднем энергопотреблении | Высокий момент при высоком потреблении тока | Высокий момент на низких скоростях при низком энергопотреблении |
| Максимальная эффективность | средний скоростной диапазон | высокоскоростной диапазон | низкоскоростной диапазон |
Общий характер изменения динамических характеристик ШД в зависимости от типа подклюяения
Как подключить шаговые двигатели
Контроллер ЧПУ Buildbotics предоставляет четыре драйвера биполярных шаговых двигателей. Он не может управлять униполярными шаговыми двигателями. К счастью, большинство шаговых двигателей можно подключить как биполярные двигатели.
Он не может управлять униполярными шаговыми двигателями. К счастью, большинство шаговых двигателей можно подключить как биполярные двигатели.
Для подключения шагового двигателя к контроллеру ЧПУ Buildbotics необходимо правильно подключить четыре провода от драйвера к нужным проводам на двигателе. К сожалению, шаговые двигатели бывают разных конфигураций и не всегда сразу понятно, как их подключить. Есть несколько характеристик, которые отличают шаговые двигатели друг от друга. Одно большое отличие заключается в количестве проводов, отходящих от двигателя. Нередко встречаются двигатели с 4, 5, 6 или 8 проводами, выходящими из двигателя. В этой статье обсуждается каждая из этих конфигураций.
Контроллер ЧПУ Buildbotics обеспечивает четыре выхода драйвера двигателя через заднюю панель на портах, помеченных X, Y, Z и A. Все четыре порта подключены одинаково и выглядят следующим образом:
Каждый выход имеет четыре контакта. Верхний левый контакт — B+, нижний левый — B-, верхний правый — A- и нижний правый — A+. B- и B+ должны управлять одной из катушек двигателя, а A- и A+ должны управлять другой катушкой двигателя.
B- и B+ должны управлять одной из катушек двигателя, а A- и A+ должны управлять другой катушкой двигателя.
Buildbotics предлагает готовые кабели, которые подключаются к выходам драйвера на одном конце. Эти кабели имеют цветовую маркировку: провод A+ красный, провод A- черный, провод B+ желтый, а провод B- фиолетовый.
Подключение 4-проводных двигателей
Для подключения 4-проводных шаговых двигателей необходимо подключить A+ и A- к одной из катушек двигателя, а B+ и B- к другой катушке двигателя.
Хитрость заключается в том, чтобы выяснить, какие провода составляют пары катушек. Вот три способа выяснить это:
- Найдите документацию на двигатель. Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Приложив немного усилий, обычно можно получить техпаспорт двигателя. В техническом описании обычно провода указываются как A+, A-, B+ и B-, или, по крайней мере, показывается, какие провода по цвету подключаются к каким катушкам.
- Если вы не можете найти техпаспорт, но у вас есть омметр, измерьте сопротивление между любыми двумя проводами двигателя. Если вы измеряете близкое короткое замыкание, то эта пара составляет одну катушку, а два других провода составляют другую катушку. Если это обрыв, то измеряйте между первым проводом и другим проводом, а затем до четвертого провода, пока не найдете короткое замыкание. Обратите внимание, что я говорю почти короткий, потому что катушка представляет собой длинный тонкий провод и имеет некоторое сопротивление. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
- Если у вас нет омметра, большинство людей могут определить пары на ощупь.
 Валы шагового двигателя вращаются довольно легко, когда катушки двигателя разомкнуты, но их труднее повернуть, когда катушка закорочена. Во-первых, оставьте все четыре катушки двигателя открытыми и поверните вал двигателя, чтобы почувствовать, насколько тяжело он вращается. Затем скрутите любые два провода вместе. Если двигатель крутится значительно труднее, значит, вы замкнули одну из катушек и идентифицировали пару. Если нет, отсоедините два провода друг от друга и подключите третий провод к первому проводу. Если двигатель не крутится сильнее, отсоедините третий провод от первого провода и подключите четвертый провод. Одна из комбинаций должна вращаться труднее, это одна катушка, а два провода составляют другую катушку. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении.
Валы шагового двигателя вращаются довольно легко, когда катушки двигателя разомкнуты, но их труднее повернуть, когда катушка закорочена. Во-первых, оставьте все четыре катушки двигателя открытыми и поверните вал двигателя, чтобы почувствовать, насколько тяжело он вращается. Затем скрутите любые два провода вместе. Если двигатель крутится значительно труднее, значит, вы замкнули одну из катушек и идентифицировали пару. Если нет, отсоедините два провода друг от друга и подключите третий провод к первому проводу. Если двигатель не крутится сильнее, отсоедините третий провод от первого провода и подключите четвертый провод. Одна из комбинаций должна вращаться труднее, это одна катушка, а два провода составляют другую катушку. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Подключение 5-проводных двигателей
5-проводные двигатели являются строго униполярными двигателями и не могут подключаться как биполярные двигатели. Таким образом, они несовместимы с контроллером ЧПУ Buildbotics.
Подключение 6-проводных двигателей
6-проводных двигателей можно сконфигурировать как однополярные или биполярные последовательные двигатели. Контроллер ЧПУ Buildbotics не поддерживает униполярные двигатели. Здесь показаны биполярные последовательные соединения.
6-проводные двигатели имеют две катушки с центральным отводом и обнажают концы катушек и проводник с центральным отводом катушки. Это три провода для каждой из двух катушек. Центральные отводы не подключены, а концы катушки подключены, как показано на рисунке. Хитрость заключается в том, чтобы выяснить, какие провода принадлежат каждой катушке, а какой из этих проводов является центральным проводником. Вот два метода:
Вот два метода:
- Найдите документацию на двигатель. Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Возможно, вам придется позвонить продавцу. Приложив немного усилий, обычно можно получить техпаспорт двигателя. В техническом описании обычно провода указываются как A+, A-, B+ и B-, или, по крайней мере, показывается, какие провода по цвету подключаются к каким катушкам.
- Используйте омметр для идентификации отдельных катушек. Любые провода, которые кажутся соединенными с сопротивлением в несколько Ом, будут частью одной катушки. Провода, которые кажутся разомкнутыми, являются частью разных катушек. Произвольно выберите одну из катушек как «А», а другую как «В». После того, как катушки были идентифицированы, измерьте сопротивление между каждым из трех проводов на этой катушке. Сопротивление между двумя концами катушки примерно в два раза превышает сопротивление между любым концом катушки и центральным отводом катушки. Когда концы катушки определены, произвольно выберите один из концов как «+», а другой как «-» для каждой катушки.
 Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Подключение 8-проводных двигателей
Восьмипроводные двигатели могут быть сконфигурированы как униполярные, биполярные последовательные или биполярные параллельные двигатели. Контроллер ЧПУ Buildbotics не поддерживает однополярные соединения. Перед настройкой 8-проводного двигателя необходимо сначала решить, следует ли настроить двигатель как биполярный последовательный или как биполярный параллельный двигатель. Двигатели с биполярным параллельным соединением, как правило, обеспечивают более высокую максимальную скорость, но потребляют в два раза больше тока, чем двигатели с последовательным соединением. Последовательную конфигурацию следует использовать, если ток параллельной конфигурации превышает выходную мощность драйвера.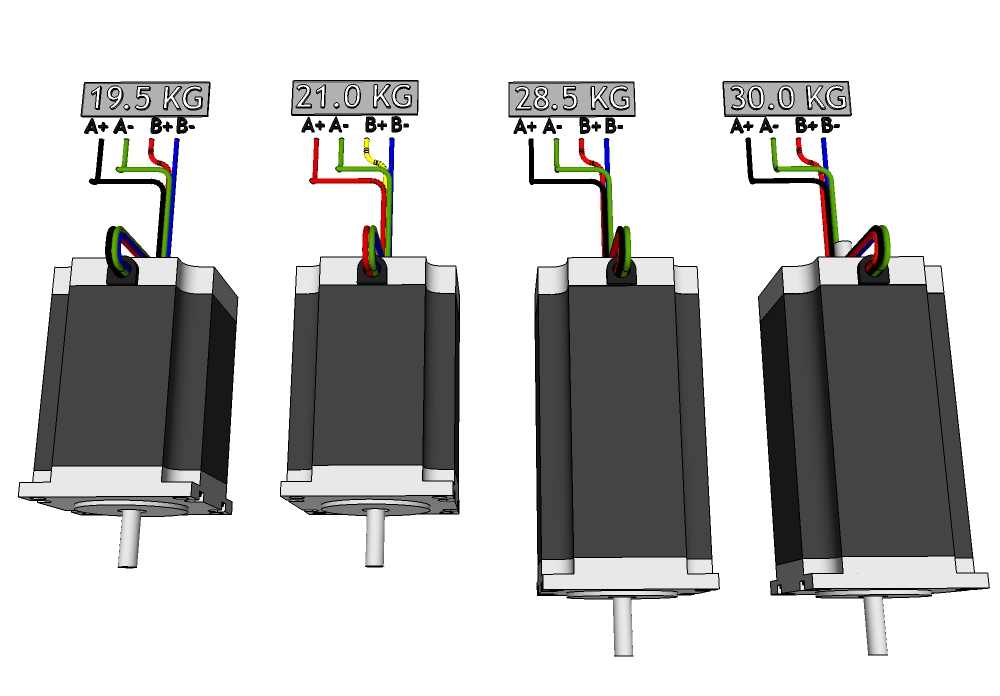 Особенно это касается больших двигателей. В случае контроллера ЧПУ Buildbotics максимальный ток составляет 6 ампер для любого отдельного порта двигателя.
Особенно это касается больших двигателей. В случае контроллера ЧПУ Buildbotics максимальный ток составляет 6 ампер для любого отдельного порта двигателя.
На следующей схеме показаны соединения для 8-проводного последовательного биполярного шагового двигателя.
На следующей схеме показаны соединения для 8-проводного параллельного биполярного шагового двигателя.
Перебрать все возможные комбинации соединений с помощью омметра или на ощупь нереально. Для подключения нужен паспорт двигателя. Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Возможно, вам придется связаться с продавцом, чтобы получить паспорт двигателя. В техническом описании провода обычно указываются как A1+, A1-, A2+, A2-, B1+, B1-, B2+ и B2- или что-то в этом роде. Учитывая эту информацию, просто подключите двигатели, как показано на схемах выше.
Как использовать твердотельное реле
Модернизация Dyna Myte 2400 контроллером ЧПУ Buildbotics
Подключение ШИМ-шпинделя
Вы можете построить ЧПУ, но можете ли вы объяснить это?
Подключение ЧПУ к WiFi
Фрезерный станок с ЧПУ Buildbotics Джеймса Б.

Использование датчика приближения SN04-N в качестве концевого выключателя
Рекомендуемые шаговые двигатели
Самодельный фрезерный станок с ЧПУ Doug’s Buildbotics
Фрезерный станок с ЧПУ 6040
ЧПУ 6040 Buildbotics Рэнди Савелла со шпинделем Huanyang VFD
Обзоры контроллеров Buildbotics
Что нового в CAMotics v1.1.0?
Как создать симулятор ЧПУ
Buildbotics + CAMotics на выставке Maker Faire 2017
Преобразование файлов 2D DXF в GCode
Гайд по шаговому двигателю NEMA 17 Размеры, разводка контактов
Шаговый двигатель NEMA 17 представляет собой бесщеточный электродвигатель постоянного тока, который делит полный оборот на равные шаги. Он подходит для приложений, где требуется точное движение. В этой статье мы обсудим шаговый двигатель NEMA-17, его применение и распиновку двигателя. Мы также подробно обсудим некоторые его технические характеристики.
Он подходит для приложений, где требуется точное движение. В этой статье мы обсудим шаговый двигатель NEMA-17, его применение и распиновку двигателя. Мы также подробно обсудим некоторые его технические характеристики.
Что такое NEMA?
NEMA расшифровывается как «Национальная ассоциация производителей электрооборудования». Это организация, которая устанавливает стандарты для компаний, производящих электротехническую продукцию и/или оборудование в различных секторах. Эта стандартизация устраняет некоторые распространенные недоразумения между пользователями и производителями электротехнической продукции и улучшает состояние производства электротехнической продукции.
Содержание
- Что такое NEMA?
- Шаговый двигатель NEMA 17
- Технические характеристики шагового двигателя NEMA 17
- Размеры шагового двигателя NEMA 17
- Схема расположения выводов шагового двигателя NEMA 17
- Применение шагового двигателя NEMA 17
- Лист технических данных шагового двигателя NEMA 17
- Часто задаваемые вопросы 013
NEMA 17 является гибридный шаговый двигатель, который вращается с углом шага 1,8 градуса.
Шаговый двигатель NEMA 17 Таким образом, чтобы совершить один оборот, вал делает 200 шагов. Термин «гибрид» означает, что это комбинация шагового двигателя с постоянным магнитом и переменным сопротивлением. Шаговые двигатели NEMA 17 с размерами 1,7 x 1,7 дюйма (42 x 42 мм) спроектированы так, чтобы обеспечивать больший крутящий момент, чем меньшие варианты, такие как шаговый двигатель NEMA 14.
Таким образом, чтобы совершить один оборот, вал делает 200 шагов. Термин «гибрид» означает, что это комбинация шагового двигателя с постоянным магнитом и переменным сопротивлением. Шаговые двигатели NEMA 17 с размерами 1,7 x 1,7 дюйма (42 x 42 мм) спроектированы так, чтобы обеспечивать больший крутящий момент, чем меньшие варианты, такие как шаговый двигатель NEMA 14. Как и любой другой двигатель, шаговый двигатель NEMA 17 состоит из статора и ротора. Ротор двигателя NEMA 17 представляет собой постоянный магнит с 50 зубьями по окружности. Статор — это просто электромагнит с 48 зубьями. Они объединены в четыре пары групп, каждая из которых может управляться возбуждением постоянным током. Итак, когда мы возбуждаем пары катушек статора с помощью микроконтроллера, ротор вращается с плавным ступенчатым углом.
Спецификации NEMA 17
Технические характеристики 6-проводного 2-фазного (4 В, 1,2 А) шагового двигателя NEMA 17 приведены в таблице ниже: 160
4В Номинальный ток/фаза 0,95 А Угол шага 1,8° Число фаз 9016 5 456 Фазовое сопротивление 3,3 Ом Индуктивность 4 мГн Длина 33 мм Инерция ротора 902 1 2 2 90 Диаметр вала Φ5 мм Длина вала 22 мм Размер корпуса 42 x 42 мм Униполярный удерживающий момент 2,59 кг-см (36 унций-дюйм) Точность сопротивления 10% 0160 Точность индуктивности 20% Точность угла шага ±5% (полный шаг, без нагрузки) Повышение температуры Макс.  (номинальный ток, 2 фазы включены)
(номинальный ток, 2 фазы включены) Температура окружающей среды -10°C ~ +50°C Сопротивление изоляции 100 МОм Мин. 500 В пост. тока Диэлектрическая прочность 500 В перем. тока • 5 мА в течение одной минуты Радиальный зазор вала 0,06 Макс. (нагрузка 450 г) Осевой зазор вала 0,08 Макс. (нагрузка 450 г) Размеры шагового двигателя NEMA 17
Размеры шагового двигателя NEMA 17Двигатель NEMA 17 имеет размеры лицевой панели 1,7 на 1,7 дюйма (43 мм × 43 мм). В зависимости от производителя другие размеры двигателя могут измениться, но размеры лицевой панели останутся прежними. Как и для описанного выше 6-проводного 2-фазного (4 В, 1,2 А) шагового двигателя NEMA 17, длина двигателя составляет 33 мм, диаметр вала — Φ5 мм, а длина вала — 22 мм. Если взять такой же мотор от другого производителя, то эти значения могут отличаться.

Схема контактов шагового двигателя NEMA 17
В зависимости от модели шаговый двигатель NEMA 17 может иметь 4, 5 или 6 проводов. Модели с 5 и 6 проводами являются униполярными шаговыми двигателями, а модель с 4 проводами — биполярными шаговыми двигателями.
Униполярные двигатели
Униполярный шаговый двигатель имеет два набора обмоток, расположенных перпендикулярно друг другу. Такое расположение обмоток создает вращающееся магнитное поле для ротора.
6-проводной шаговый двигатель
Если центральные ответвления берутся из каждой обмотки катушки, двигатель становится 6-проводным шаговым двигателем, и полученное таким образом расположение показано на рисунке ниже. Используя этот метод, мы создали четыре фазы вместо двух. Теперь каждая секция этой обмотки может быть запитана, исходя из необходимого для ротора угла шага.
Разводка 6-проводного шагового двигателя NEMA 17В таблице ниже приведены выводы 6-проводного шагового двигателя.

Назначение выводов 6-проводного шагового двигателяНомер провода Тип провода Цвет провода 1 Первый конец катушки 1 Черный 3 Второй конец катушки 1 красный/белый 4 первый конец катушки 2 зеленый 5 7 белый 9016 центральный кран 9016 165 6 Второй конец катушки 2 Зеленый/белый 5-проводного шагового двигателя
В приведенной выше конструкции каждый центральный отвод служит общим проводом для двух фаз. Но если мы соединим оба центральных ответвления вместе, чтобы создать общий провод для всех четырех фаз, управление станет проще. Таким образом, двигатель становится 5-проводным шаговым двигателем, расположение обмоток которого показано на рисунке ниже.
Распиновка 5-проводного шагового двигателя NEMA 17
В таблице ниже приведены выводы 5-проводного шагового двигателя.
Распиновка 5-проводного двигателя Шаговый двигатель 20 3 Bipolar 20 390 BiНомер провода Тип провода Цвет провода 1 9016 Первый конец катушки 0160 Красный 2 Центральный кран (общий для обе катушки) Черный 3 Второй конец катушки 1 Красный/белый 4 Первый конец катушки 2 Зеленый 5 Второй конец катушки 2 Зеленый/белый полярные шаговые двигатели имеют только два наборы обмоток без центральных ответвлений, поэтому у него всего 4 провода. Управление биполярным двигателем становится затруднительным, поскольку для изменения направления тока в обмотке требуется Н-мост.
 (Подробнее)
(Подробнее) Схема обмотки 4-проводного шагового двигателя показана на рисунке ниже.
Выводы 4-проводного шагового двигателя NEMA 17В таблице ниже приведены выводы 4-проводного шагового двигателя.
Назначение контактов 4-проводного шагового двигателяНомер провода Тип провода Цвет провода 1 9016 Первый конец катушки 0160 Красный 2 Второй конец катушки 1 Желтый 3 Первый конец катушки 2 Черный 4 Второй конец катушки 2 Оранжевый Примечание. Цвет провода, обозначающий каждую катушку/центральный отвод, может не соответствовать действительности для всех моделей. В зависимости от производителя и типа модели цвет проводов может быть разным.
Применение шагового двигателя NEMA 17
Как обсуждалось выше, шаговые двигатели NEMA 17 имеют высокий удерживающий момент.
 Несмотря на то, что некоторые двигатели имеют разомкнутую систему, их точность высока и подходит для приложений с высоким крутящим моментом и ускорением от низкого до среднего. Вот некоторые из распространенных применений этих двигателей:
Несмотря на то, что некоторые двигатели имеют разомкнутую систему, их точность высока и подходит для приложений с высоким крутящим моментом и ускорением от низкого до среднего. Вот некоторые из распространенных применений этих двигателей: - Факсы
- Малая робототехника
- Игровые автоматы
- Аппараты для медицинской визуализации
- Копировальные аппараты
- Оборудование для 3D-печати
- Текстильные машины
- Печатные станки
- Фрезерные станки с ЧПУ es
Шаговый двигатель NEMA 17 Лист данных
As обсуждалось выше, шаговый двигатель NEMA 17 производится разными производителями. Если вы ищете общие и электрические характеристики для различных моделей NEMA 17, нажмите здесь.
Щелкните здесь, чтобы загрузить техническое описание шагового двигателя NEMA 17 производства Schneider Electric.
Часто задаваемые вопросы
Какова скорость вращения шагового двигателя NEMA 17?
Шаговые двигатели лучше всего работают со скоростью примерно 1200 об/мин или ниже.
 Хотя можно увеличить скорость небольшого шагового двигателя с помощью более мощного контроллера, это сократит срок службы двигателя.
Хотя можно увеличить скорость небольшого шагового двигателя с помощью более мощного контроллера, это сократит срок службы двигателя.
Примечание: В шаговом двигателе максимальный крутящий момент создается при нулевой скорости. Однако крутящий момент падает по мере увеличения скорости.Максимальная скорость, с которой может работать шаговый двигатель NEMA 17 без обратной связи, составляет 2000 об/мин. Но рекомендуемый диапазон скоростей составляет 200-600 об/мин. В то время как для шагового двигателя NEMA 17 с замкнутым контуром максимальная скорость составляет 3000 об/мин. Для этого рекомендуемый диапазон скорости составляет 200-700 об/мин.
Насколько мощный шаговый двигатель Nema?
Двигатель считается надежным, если он обеспечивает высокий удерживающий момент. Для разных версий шагового двигателя NEMA 17 удерживающий момент варьируется от 2 кг-см до 5 кг-см. В то время как ток колеблется от 0,7 Ампер до 1,7 Ампер.
 Благодаря более высокому крутящему моменту эти двигатели используются в 3D-принтерах, станках с ЧПУ, робототехнике и других промышленных приложениях.
Благодаря более высокому крутящему моменту эти двигатели используются в 3D-принтерах, станках с ЧПУ, робототехнике и других промышленных приложениях. Все ли шаговые двигатели NEMA 17 одинаковы?
Номера NEMA обозначают стандартные размеры лицевой панели, на которой крепится двигатель. Никаких других характеристик мотора в нем не указывается. Это означает, что при наличии двух разных двигателей NEMA 17 они могут иметь совершенно разные технические характеристики и не могут использоваться вместо друг друга.
Стандартизация NEMA обеспечивает взаимозаменяемость, т. е. возможность перехода от одного производителя к другому без хлопот по замене различных частей двигателя, таких как муфты, монтажные кронштейны и т. д. Но, если мы возьмем шаговый двигатель NEMA 17, разработанный двух разных производителей, есть вероятность, что эти два двигателя могут иметь разные электрические или механические характеристики. Такие как длина и диаметр стержня, количество подводящих проводов и многое другое.

Поэтому перед установкой двигателя в каком-либо приложении рассмотрите все спецификации шагового двигателя NEMA от двух разных производителей.
Что означает NEMA 17?
Номер после двигателей NEMA указывает на размеры двигателя, указанные на паспортной табличке. В общем, для двигателя NEMA XX, разделив XX на 10, вы получите диаметр лицевой панели в дюймах. Следовательно, шаговый двигатель NEMA 17 имеет диаметр 1,7 дюйма. Размеры шагового двигателя NEMA 17 составляют 1,7 на 1,7 дюйма (43 мм × 43 мм).
В 3D-принтерах используются шаговые или серводвигатели?
Обычно в 3D-принтерах используются шаговые двигатели из-за их простого и точного управления. Это связано с тем, что шаговые двигатели имеют разомкнутую систему. Концевой выключатель можно использовать для создания исходного положения шагового двигателя, и, таким образом, путем подсчета шаговых импульсов можно управлять движением двигателя.
С другой стороны, серводвигатели работают в замкнутой системе.

