Как регулировать обороты трехфазного электродвигателя. Какие существуют способы изменения скорости вращения. Какие устройства применяются для регулировки частоты вращения трехфазных двигателей. Какие преимущества дает частотное регулирование.
Основные способы регулировки оборотов трехфазного двигателя
Регулирование скорости вращения трехфазных асинхронных двигателей может осуществляться несколькими способами:
- Изменение числа пар полюсов обмотки статора
- Изменение напряжения, подаваемого на обмотки статора
- Изменение активного сопротивления в цепи ротора (для двигателей с фазным ротором)
- Изменение частоты питающего напряжения
Рассмотрим подробнее каждый из этих методов регулировки оборотов трехфазного двигателя.
Регулировка путем изменения числа пар полюсов
Данный способ позволяет ступенчато изменять скорость вращения двигателя за счет переключения обмоток статора. Число пар полюсов определяет синхронную скорость вращения магнитного поля по формуле:
n = 60f / p
где n — синхронная скорость, об/мин; f — частота сети, Гц; p — число пар полюсов.
При этом фактическая скорость ротора будет несколько ниже синхронной из-за скольжения. Изменяя число пар полюсов, можно получить ступенчатое регулирование скорости. Например, при f = 50 Гц:
- 1 пара полюсов — 3000 об/мин
- 2 пары полюсов — 1500 об/мин
- 3 пары полюсов — 1000 об/мин
- 4 пары полюсов — 750 об/мин
Преимущество метода — простота реализации. Недостаток — ступенчатое регулирование с ограниченным числом фиксированных скоростей.
Регулировка изменением напряжения питания
При снижении напряжения, подаваемого на обмотки статора, уменьшается магнитный поток двигателя, что приводит к увеличению скольжения и снижению частоты вращения. Зависимость между напряжением U и скоростью n имеет вид:
n = n0(1 — s), где s ~ 1/U 2
Здесь n0 — синхронная скорость, s — скольжение.
Данный способ позволяет плавно регулировать обороты в диапазоне примерно от 100% до 20-30% от номинальной скорости. Недостаток — при снижении напряжения уменьшается момент двигателя.
Реостатное регулирование скорости
Применяется для двигателей с фазным ротором. В цепь обмотки ротора включается дополнительное активное сопротивление, что приводит к увеличению скольжения и снижению скорости вращения. Зависимость скорости от сопротивления имеет вид:
n = n0(1 — sном(R2 + Rдоп) / R2ном)
где R2 — активное сопротивление обмотки ротора, Rдоп — добавочное сопротивление.
Метод обеспечивает плавное регулирование скорости, но сопровождается потерями энергии в добавочных резисторах.
Частотное регулирование скорости
Наиболее эффективный способ управления скоростью трехфазных асинхронных двигателей. Основан на изменении частоты питающего напряжения с помощью преобразователя частоты. При этом скорость вращения магнитного поля статора прямо пропорциональна частоте:
n0 = 60f / p
Одновременно с частотой изменяется и амплитуда напряжения для поддержания постоянства магнитного потока. Это позволяет сохранить высокий момент двигателя во всем диапазоне регулирования.
Преимущества частотного регулирования оборотов
Применение преобразователей частоты для управления скоростью трехфазных двигателей дает ряд существенных преимуществ:

- Плавное регулирование в широком диапазоне (обычно от 5% до 200% от номинальной скорости)
- Высокая точность поддержания заданной скорости
- Возможность программирования различных режимов работы
- Экономия электроэнергии за счет оптимизации режимов работы
- Плавный пуск и торможение двигателя
- Защита двигателя от перегрузок
Все это делает частотное регулирование наиболее предпочтительным для большинства применений трехфазных асинхронных двигателей.
Устройства для регулировки оборотов трехфазного двигателя
Для реализации различных способов регулирования скорости трехфазных двигателей применяются следующие устройства:
Переключатели числа пар полюсов
Представляют собой коммутационные аппараты для переключения соединений обмоток статора. Позволяют ступенчато изменять скорость вращения.
Тиристорные регуляторы напряжения
Изменяют действующее значение напряжения, подаваемого на статор, за счет фазового управления тиристорами. Обеспечивают плавное регулирование скорости.
Реостаты
Применяются для двигателей с фазным ротором. Включаются в цепь ротора для изменения его активного сопротивления и регулирования скольжения.
Преобразователи частоты
Наиболее совершенные устройства для управления скоростью асинхронных двигателей. Преобразуют напряжение сети в трехфазное напряжение регулируемой частоты и амплитуды.
Преобразователи частоты для трехфазных двигателей
Современные преобразователи частоты представляют собой сложные электронные устройства на базе силовых полупроводниковых ключей (IGBT-транзисторов). Основные функциональные узлы преобразователя частоты:
- Выпрямитель для преобразования переменного напряжения сети в постоянное
- Звено постоянного тока с конденсатором
- Инвертор для формирования трехфазного напряжения заданной частоты
- Система управления
Преобразователи частоты обеспечивают:
- Плавный пуск и останов двигателя
- Регулирование скорости в широком диапазоне
- Поддержание заданной скорости с высокой точностью
- Ограничение тока и момента двигателя
- Энергосбережение при работе с переменной нагрузкой
- Защиту двигателя и преобразователя
Как выбрать преобразователь частоты
При выборе преобразователя частоты для регулирования оборотов трехфазного двигателя нужно учитывать следующие параметры:
- Мощность двигателя — преобразователь выбирается на ток не менее номинального тока двигателя
- Диапазон регулирования скорости — определяет требуемый диапазон выходной частоты
- Характер нагрузки — постоянный или переменный момент
- Условия эксплуатации — температура, влажность, запыленность
- Требуемые функции управления и защиты
- Способ охлаждения преобразователя
- Необходимость динамического торможения
Правильный выбор преобразователя частоты обеспечит оптимальное управление двигателем и высокую энергоэффективность привода.
Настройка преобразователя частоты
Для корректной работы преобразователя частоты с конкретным двигателем требуется выполнить его настройку. Основные этапы настройки:
- Ввод паспортных данных двигателя (мощность, напряжение, ток, частота, скорость)
- Настройка параметров разгона и торможения
- Выбор способа управления (скалярное или векторное)
- Настройка защит двигателя и преобразователя
- Выбор источников управляющих команд и задания скорости
- Оптимизация работы в конкретных условиях применения
Правильная настройка преобразователя частоты позволит максимально использовать возможности частотного регулирования скорости трехфазного двигателя.
Применение частотного регулирования
Частотное управление скоростью трехфазных асинхронных двигателей широко применяется в различных отраслях промышленности и ЖКХ:
- Насосные и вентиляторные установки
- Компрессоры
- Конвейеры и транспортеры
- Подъемно-транспортные механизмы
- Станки и производственное оборудование
- Экструдеры и миксеры
- Центрифуги
- Лифты
Использование преобразователей частоты позволяет значительно повысить энергоэффективность технологических процессов, улучшить качество выпускаемой продукции, снизить эксплуатационные расходы.
Что представляет собой трехфазный регулятор оборотов двигателя
Содержание
- 1 Общие характеристики
- 2 О микросхеме
- 3 Основной функционал
- 4 Регуляторы бесщеточных моторов
В статье мы опишем все особенности такого устройства, как регулятор оборотов двигателя на 3 фазы. Прибор довольно полезен в работе, обеспечивает слаженную регулировку. Кроме приобретения в магазине, можно провести самостоятельное его конструирование.
Контроллер скорости двигателя постоянного тока ШИМ-12-40 в 10 А
Во многих интернет сообществах часто возникает вопрос о том, как грамотно осуществить регулировку оборотов для электрического двигателя асинхронного или другого типов. Большинство электриков рекомендуют применять традиционный симистор с реализованным фазовым управлением. Также можно применять инвертор, что обусловливается более низкой скоростью асинхронного мотора, по сравнению с синхронными модификациями (разница около 20%). Далее мы рассмотрим ключевые схемы и методики реализации трехфазного регулятора.
В процессе создания такого элемента регулировки можно применять самые разные виды схем, каждая из которых обладает своими особенностями. Компоненты способны генерировать разное количество ШИМ-сигналов и имеют разные монтажные параметры. Далее мы приведем пример реализации одного из цифровых регуляторов, который является одним из самых оптимальных.
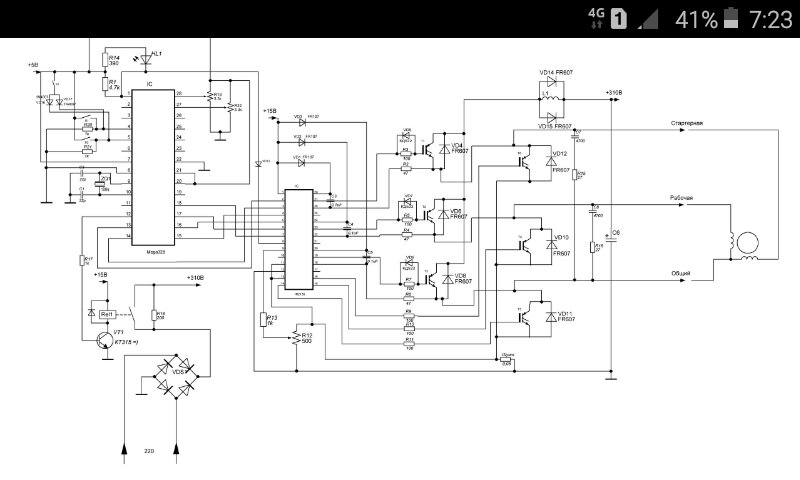
Общие характеристикиВ нашем примере мы используем микросхему типа MC3PHAC, которая обладает вполне мощными характеристиками, среди которых – возможность генерирования шести ШИМ-сигналов для трехфазного электродвигателя, работающего от сетей переменного тока. Данный блок с легкостью подключается к транзисторам типов Mosfet, IGBT, посредством ключевого привода.
Транзистор Mosfet
Сигналы совместимы с инверторами типа IGBT и IPM, а также генерирует импульсы торможения. Схема эффективно работает автономно и в процессе эксплуатации не требует настроек, программирования и кодирования.
Органы управления, реализованные посредством схемы:
- потенциометр, отвечающий за ускорение, маркируется как PR1;
- устройство для регулировки показателя скорости – PR2;
- переключатель типа DIPX4 для задания частот 50/60 Герц и определения выхода на низкий и высокий активный – SW1;
- разъединитель сброса – SW2;
- запуск и остановка мотора – SW3;
- элемент, изменяющий направление вращения двигателя – SW4.

Перед тем, как начать реализовывать своими руками регулятор вращений, стоит учесть все особенности платы, которая будет лежать в основе. МС3РНАС представляет собой интеллектуальный контроллер монолитной конструкции, изготовленный в полном соответствии с требованиями маломощных трехфазных систем управления. Обеспечивают точное регулирование скорости вращения. Деталь с легкостью подстраивается под рабочие параметры конкретного электродвигателя.
Приспособление включает все требуемые функции, позволяющие реализовывать полный спектр управляющих функций. Набор возможностей делает микросхему отличным вариантом для приборов, в процессе работы которых необходима бесперебойная поддержка управленческих параметров моторов переменного тока.
Основной функционалMC3PHAC
Итак, как мы только что указали, применение платы управления позволит осуществлять широкий перечень функций. К ним относятся такие:
- регулирование скорости.
 Обеспечивается возможностью задания синхронной частоты двигателя в режиме реального времени. Это приемлемо для диапазона значений 1 – 128 Гц и проводится с помощью потенциометра PR2 (на схеме). Масштабируемость осуществляется с коэффициентом 25,6 Гц на 1В. Стабильность скорости обеспечивается цифровым фильтром на 24 бит;
Обеспечивается возможностью задания синхронной частоты двигателя в режиме реального времени. Это приемлемо для диапазона значений 1 – 128 Гц и проводится с помощью потенциометра PR2 (на схеме). Масштабируемость осуществляется с коэффициентом 25,6 Гц на 1В. Стабильность скорости обеспечивается цифровым фильтром на 24 бит; - обеспечение ускорения и управление ним. Показатель задается также в актуальном времени, минимальный уровень – 0,5 Гц/сек, максимальный достигает уровня 128. За это отвечает потенциометр, на схеме обозначенный, как PR1;
- безопасность. Функция реализуется путем отключения ШИМа, при определении неисправностей в плате МС3. Отключенное состояние сохраняется до полного устранения неполадки;
- мониторинг на предмет внешних неисправностей. Наличие выхода Faultin позволяет принимать цифровой сигнал, который указывает на точную неисправность, обнаруженную посредством внешних контрольных цепей. ШИМ отключается, если на входе присутствует высокий уровень;
- восстановление (регенерация).
 Функция обеспечивает экономию, сохраняя механическую энергию в моторе, которая вместе с нагрузкой переносится обратно на привод. В большинстве случаев этот процесс имеет место при принудительном замедлении;
Функция обеспечивает экономию, сохраняя механическую энергию в моторе, которая вместе с нагрузкой переносится обратно на привод. В большинстве случаев этот процесс имеет место при принудительном замедлении; - контроль целостности напряжения. Отслеживание входного сигнала pin 10 cn3 реализуется в DC_Bus на частоте максимум 5,3 кГц. При автономной работе пороги устанавливаются на значении 4,47В, что является где-то 128% от номинальной мощности. Когда же сигнал от DC_Bus возвращается к своим рабочим значениям, тогда таймер повторения сбоев запускается снова. ШИМ также запускается, после достижения настроенного ранее уровня тайм-аута.
Данные силовые агрегаты также поддерживают регулирование оборотов, для этого применяются все те же микросхемы, входящие в состав более крупных регуляторов. Такие компоненты широко представлены в каталогах магазинов, также есть возможность реализовать устройства самостоятельно.
Пример схемы регулятора
Давайте же рассмотрим регуляторы для бесщеточного двигателя на примере модели N76E003AT20 – микроконтроллера, разработанного для управления работой моторов ШИМ с диапазоном мощностей от 6 до 30 вольт.
Технические характеристики, которыми обладает данный бесщеточный прибор:
- уровень потребляемого тока – 0,1А;
- максимальный показатель рабочего тока – 2А;
- разновидность ШИМ – цифровой;
- частота – 0,5 – 20 кГц;
- реализовано ручное управление;
- безопасность: функция защиты от обратной полярности входящего напряжения.
Прибор является одним из таких устройств, которые способны генерировать и контролировать широтно-импульсную модуляцию. Возможности модуля позволяют ему проводить управление двигателями, конструкция которых по умолчанию включает драйвер. Задача этого элемента – самостоятельно проводить распределение тока по рабочим фазам и прием управленческих сигналов, которые идут напрямую от ШИМ-регулятора.
Регулятор обладает тремя ключевыми функциями:
- сменой направления оборотов вала;
- мгновенное торможение мотора;
- изменение уровня скорости, с которой вращается вал мотора.
 При этом применяется модуляция на 0,1-5В (PWM).
При этом применяется модуляция на 0,1-5В (PWM).
Каждая из этих возможностей реализуется с помощью терминальных клемм с винтовыми зажимами, кнопок и ручек, расположенных на плате. Именно вышеуказанные зажимы и определяют надежное подключение двигателя к системе.
Кроме микросхемы N76E003AT20, конструкция регулятора включает также и 8-битный микроконтроллер 1Т 8051, являющийся, по сути, ядром прибора. Модуль отвечает за генерирование электрических сигналов, преимущественно прямоугольной формы, мгновенно переключающих напряжение для выходного ШИМ-импульса в диапазоне 0 – 5В.
N76E003AT20
Также оператор имеет возможность осуществлять плавную настройку импульсных частот от 0,5 до 20 килогерц. Переменный резистор укомплектован специальной ручкой, вращение которой позволяет проводить изменение пульсаций. Резистор в свою очередь подключен к одному из аналоговых входов микроконтроллера.
Алгоритм работы микросхемы подразумевает смену направлений регулирования резистора переменного типа, при прокручивании ручки в одном направлении. Возле этой ручки располагается разъем на 3 контакта, перемычка которого соединяет основной вывод с крайним.
Возле этой ручки располагается разъем на 3 контакта, перемычка которого соединяет основной вывод с крайним.
В начальном положении, при оборачивании ручки по часовой стрелке, импульсная частота будет варьироваться в диапазоне 0,5 – 20 кГц. Второе же положение (при аналогичном вращении рукоятки) подразумевает уменьшение вышеуказанного уровня в обратном направлении.
Также, конструкция состоит из светодиода, располагаемого возле резистора. С помощью компонента удается визуализировать уровни выходного напряжения модуляции. К примеру, диод яркий – напряжение максимальное, а погашен – низкое.
Как можно видеть, трехфазная регулировка электродвигателей осуществляется довольно просто, главное – подобрать подходящую модель регулятора.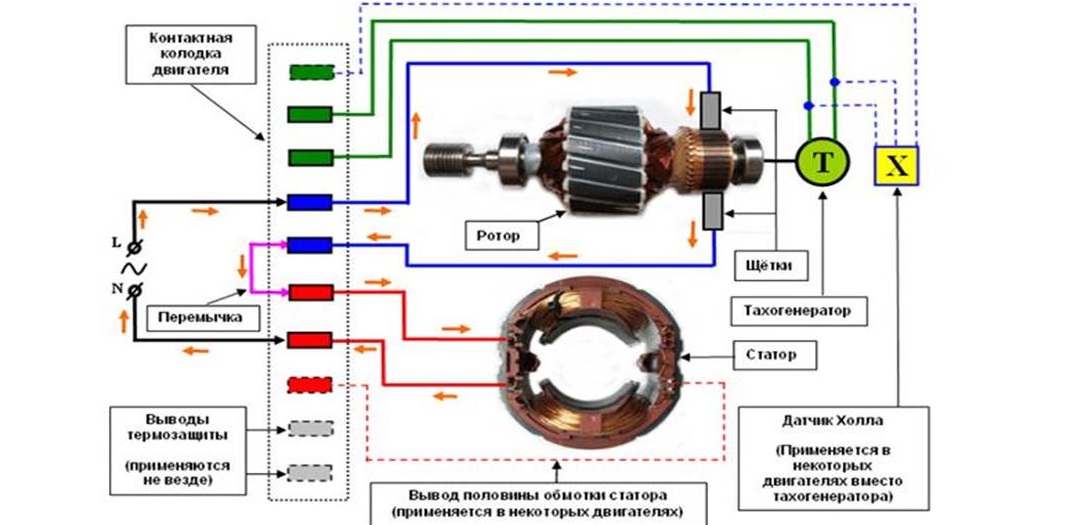 Прибор можно приобрести, или же собрать собственноручно. Как именно поступить – решает каждый отдельно, ориентируясь на особенности своего оборудования и совместимость с рабочими характеристиками мотора.
Прибор можно приобрести, или же собрать собственноручно. Как именно поступить – решает каждый отдельно, ориентируясь на особенности своего оборудования и совместимость с рабочими характеристиками мотора.
Регулировка скорости вращения асинхронного электродвигателя 220в. Регулировка оборотов асинхронного двигателя
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях. В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – . А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи.
При этом сохранится самое главное – мощность устройства.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением (для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет.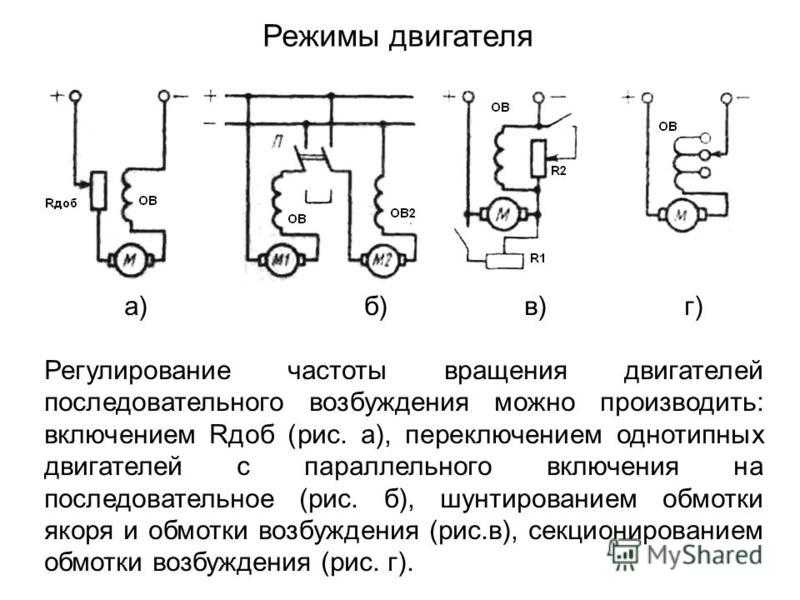 Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе.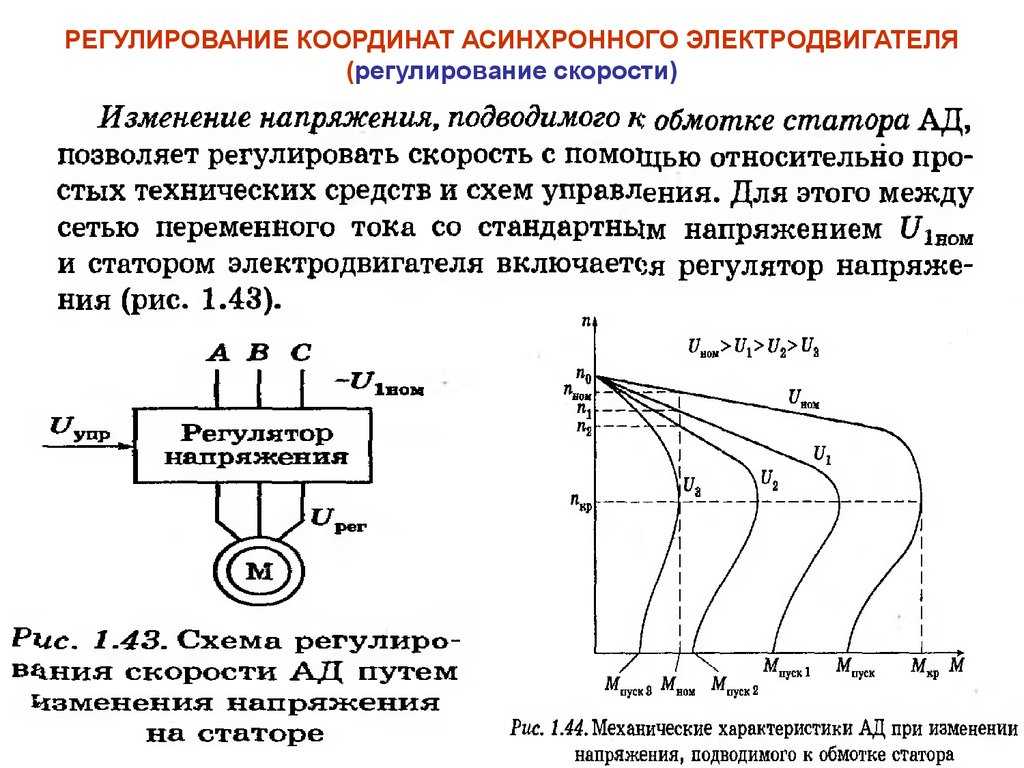 Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки. В двигателях бытовых устройств таких приспособлений нет.
Регуляторы оборотов электродвигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления.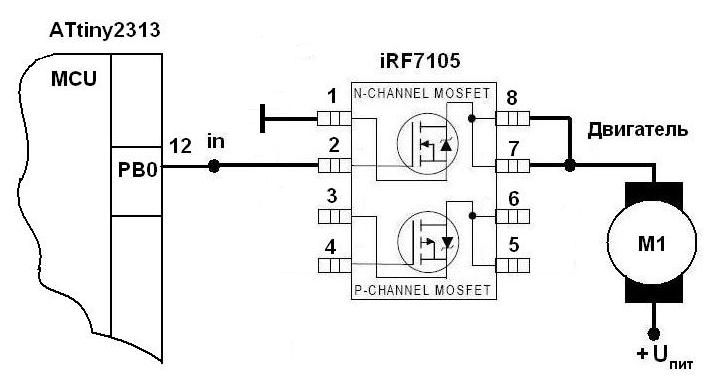 Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью .
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.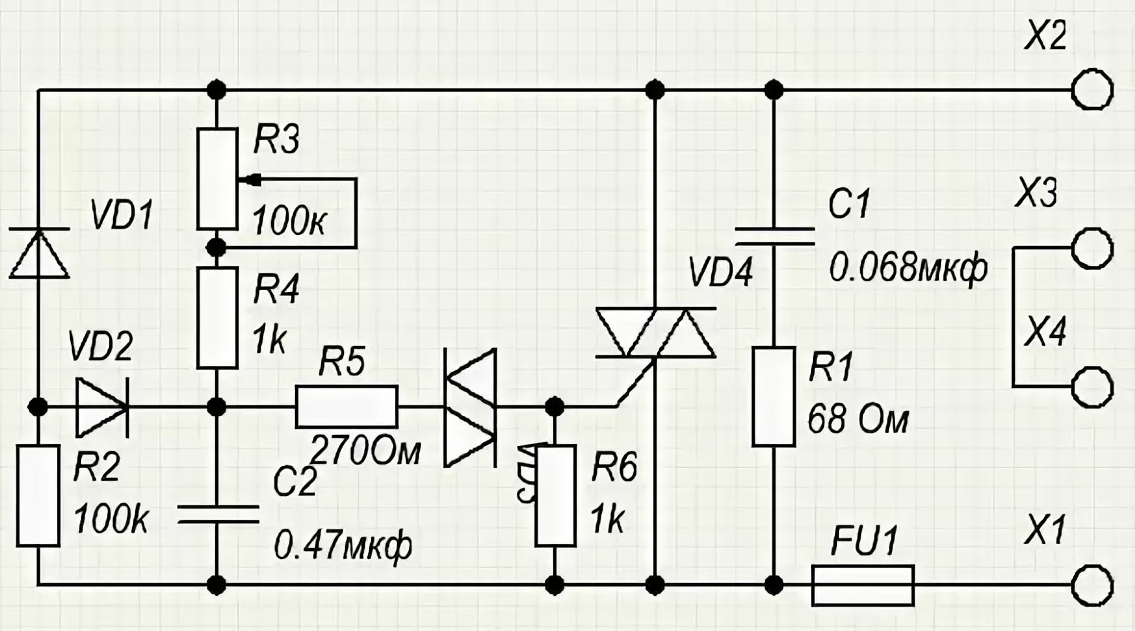
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного . Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования , мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты : выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки.
 При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.

- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).

- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.

- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. в однофазную сеть 220В.
Данный регулятор оборотов электродвигателя 220в позволяет изменять частоту либо электродвигателя, рассчитанных на работу от сети 220 вольт.
Достаточно популярным регулятором оборотов для электродвигателей на 220 вольт переменного тока является схема на тиристорах. Типовой схемой является подключение электродвигателя или вентилятора в разрыв анодной цепи тиристора.
Одно не маловажное условие при использовании подобных регуляторов, это надежный контакт во всей цепи. Что нельзя сказать про коллекторные электродвигатели, поскольку у них механизм щеток создает кратковременные обрывы электроцепи. Это существенно влияет на качество работы регулятора.
Что нельзя сказать про коллекторные электродвигатели, поскольку у них механизм щеток создает кратковременные обрывы электроцепи. Это существенно влияет на качество работы регулятора.
Описание работы схемы регулятора оборотов
Приведенная ниже схема тиристорного регулятора оборотов , как раз разработана для изменения частоты вращения коллекторных электродвигателей (электродрель, фрезер, вентилятор ). Первое, что следует отметить, это то, что двигатель вместе с силовым тиристором VS2 подсоединен в одну из диагоналей диодного моста VD3, на другую же подается сетевое напряжение 220 вольт .
Помимо этого, данный тиристор контролируется достаточно широкими импульсами, благодаря которым, непродолжительные отключения активной нагрузки, которыми характеризуется работа коллекторного двигателя, не влияют на устойчивую работу данной схемы.
Для управления тиристором VS1 на транзисторе VT1, собран генератор импульсов. Питание данного генератор осуществляется трапециевидным напряжением, создающимся в результате ограничения положительных полуволн стабилитроном VD1 имеющих частоту 100 Гц. Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистором R1 осуществляется скорость разряда данного конденсатора.
Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистором R1 осуществляется скорость разряда данного конденсатора.
При достижении на конденсаторе напряжения достаточного для открывания транзистора VT1, на управляющий вывод VS1 поступает положительный импульс. Тиристор открывается и теперь уже на управляющем выводе VS2 появляется длительный импульс управления. И уже с данного тиристора напряжение, которое фактически и влияет на величину оборотов, подается на двигатель.
Частоту оборотов вращения электродвигателя регулируют резистором R1. Так как в цепь VS2 подключена индуктивная нагрузка, то возможно спонтанное отпирание тиристора, даже при отсутствии управляющего сигнала. Поэтому для предотвращения данного нежелательного эффекта, в схему добавлен диод VD2 который подключается параллельно обмотке возбуждения L1 электродвигателя.
Детали регулятора оборотов вентилятора и электродвигателя
Стабилитрон – можно заменить на другой с напряжением стабилизации в районе 27 – 36В. Тиристоры VS1 – любой маломощный с прямым напряжением более 100 вольт, VS2 — возможно поставить КУ201К, КУ201Л, КУ202М. Диод VD2 – с обратным напряжением не меньше 400 вольт и прямым током более 0,3А. Конденсатор C1 – КМ-6.
Тиристоры VS1 – любой маломощный с прямым напряжением более 100 вольт, VS2 — возможно поставить КУ201К, КУ201Л, КУ202М. Диод VD2 – с обратным напряжением не меньше 400 вольт и прямым током более 0,3А. Конденсатор C1 – КМ-6.
Настройка регулятора оборотов
Во время наладки схемы регулятора желательно применить стробоскоп, который позволяет либо стрелочный вольтметр для переменного тока, который подсоединяют параллельно двигателю.
Вращая ручку резистора R1, определяют диапазон изменения напряжения. Путем подбора сопротивления R3 устанавливают данный диапазон в районе от 90 до 220 вольт. В том случае если при минимальных оборотах двигатель вентилятора работает неустойчиво, то необходимо немного уменьшить сопротивление R2.
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор –регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
- Область применения
- Выбираем устройство
- Устройство ПЧ
- Виды устройств
- Прибор триак
Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Контроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления. Это позволяет регулировать обороты в нужную величину.
Область примененияРегулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
- отопительный комплекс;
- приводы оборудования;
- сварочный аппарат;
- электрические печи;
- пылесосы;
- швейные машинки;
- стиральные машины.
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Схема контроллера оборотов вращения двигателя 12 в изображена на рисунке. Обороты регулируются с помощью потенциометра. Если на вход поступают импульсы с частотой 8 кГц, то напряжение питания будет 12 вольт.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.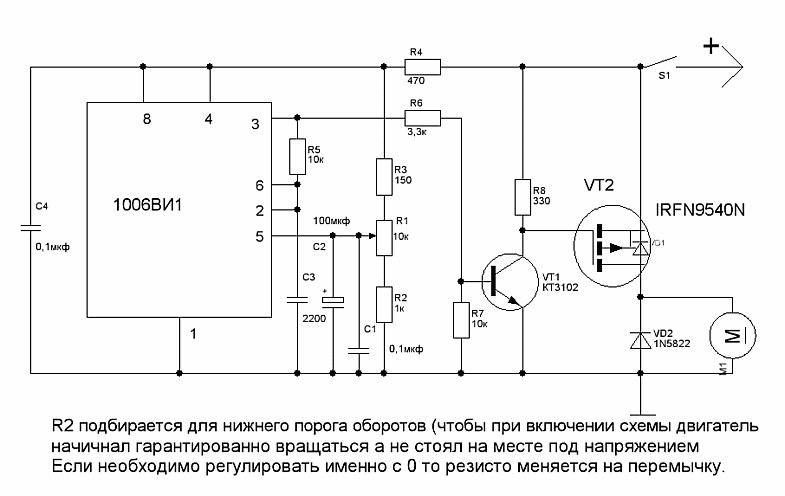
При пуске трехфазного двигателя на всю мощность, передаётся ток, действие повторяется около 7 раз. Сила тока сгибает обмотки двигателя, образуется тепло, на протяжении долгого времени. Преобразователь представляет собой инвертор, обеспечивающий превращение энергии. Напряжение поступает в регулятор, где происходит выпрямления 220 вольт с помощью диода, расположенного на входе. Затем происходит фильтрация тока посредством 2 конденсатора. Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Существует универсальный прибор 12в для бесколлекторных двигателей.
Схема состоит из двух частей–логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Виды устройств Прибор триакУстройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключахРаспространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
К источнику напряжения 24 вольт. Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.

Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Схема регулятора, с помощью которой осуществляется изменение частоту оборотов вращения двигателя или вентилятора, рассчитана на работу от сети переменного тока на напряжение 220 вольт.
Двигатель вместе с силовым тиристором VS2 подключен в диагональ диодного моста VD3, на другую же поступает сетевое напряжение переменного тока 220 вольт. Кроме того, этот тиристор осуществляет контроль достаточно широкими импульсами, благодаря чему, непродолжительные обрывы цепи, с которыми работают все коллекторные двигатели, не влияют на устойчивую работу схемы.
Управляет первым тиристором транзистор VT1, подключенный по схеме генератора импульсов. Как только напряжение на конденсаторе станет достаточным для открытия первого транзистора, на управляющий вывод тиристора поступит положительный импульс. Тиристор откроется и теперь уже на втором тиристоре появится длительный управляющий импульс. И уже с него напряжение, которое фактически и влияет на величину оборотов, поступает на двигатель.
Частоту оборотов вращения электродвигателя подстраивают переменным сопротивлением R1. Так как в цепь второго тиристора подсоединена индуктивная нагрузка, то возможно спонтанное открывание тиристора, даже в момент отсутствии управляющего сигнала. Поэтому для блокировки этого, в схему включен диод VD2 который подсоединен параллельно обмотке L1 двигателя.
Поэтому для блокировки этого, в схему включен диод VD2 который подсоединен параллельно обмотке L1 двигателя.
Во время настройки схемы регулятора оборотов двигателя желательно использовать , которым можно измерить частоту вращения электродвигателя либо обычный стрелочный вольтметр для переменного тока, который подключают параллельно двигателю.
С помощью подбора сопротивления R3 задают диапазон изменения напряжения от 90 до 220 вольт. Если при минимальных оборотах двигатель работает некорректно, то требуется уменьшить номинал резистора R2.
Эта схема хорошо подходит для регулировки скорости вращения вентилятора в зависимости от температуры.
В роли чувствительного элемента используется . В результате его нагревания уменьшается его сопротивление, и поэтому на выходе операционного усилителя, наоборот напряжение увеличивается и через полевой транзистор управляет оборотами вентилятора.
Переменным сопротивлением P1 — можно задать наименьшую скорость вращения вентилятора при наименьшей температуре, а переменным сопротивлением P2 регулируют наибольшую скорость вращения при максимальной температуре.
В нормальных условиях настраиваем резистором P1 минимальные обороты двигателя. Затем нагревают датчик и сопротивлением P2 адают нужную частоту вращения вентилятора.
Схема управляет скоростью вентилятора в зависимости от показаний температур, с помощью обычного с отрицательным температурным коэффициентом.
Схема настолько проста, что в ней присутствует только три радиокомпонента: регулируемый стабилизатор напряжения LM317T и два сопротивления, образующие делитель напряжения. Одно из сопротивлений — термистор с отрицательным ТКС, а другое — обычный резистор. Для упрощения сборки рисунок печатной платы привожу ниже.
В целях экономии, можно оснастить регулятором оборотов типовую болгарку. Такой регулятор для шлифования корпусов различной радиоэлектронной аппаратуры является незаменимым инструментом в арсенале радиолюбителя
Все современные дрели выпускают с встроенными в них регуляторами числа оборотов двигателя, но наверняка, в арсенале каждого радиолюбителя имеется старая советская дрель, у которых изменение числа оборотов не было задумано, что, резко снижает эксплуатационные характеристики.
Регулировать скорость вращения асинхронного безколлекторного двигателя можно с помощью настройки частоты питающего переменного напряжения. Данная схема позволяет регулировать скорость вращения в довольно широком диапазоне — от 1000 до 4000 оборотов в минуту.
Управление скоростью трехфазного асинхронного двигателя
Как контролировать скорость трехфазного асинхронного двигателя? Метод регулирования скорости включает в себя: изменение числа полюсов, регулирование напряжения статора, преобразование частоты статора, каскадное регулирование скорости, регулировку скорости двойной подачи, гидравлическую муфту, электромагнитную фрикционную муфту и т. д.
Дана фактическая скорость трехфазного асинхронного двигателя. по n=n с (1 — с) = 120f /p (1-с). Из формулы видно, что скорость трехфазного асинхронного двигателя можно изменить путем изменения числа полюсов асинхронного двигателя «p», скольжения «s» и частоты питания «f».
Управление скоростью с переключением полюсов
Как показано в формуле n s =120f/p, можно изменить синхронную скорость двигателя путем изменения количества полюсов обмотки статора, тем самым изменяя рабочую скорость.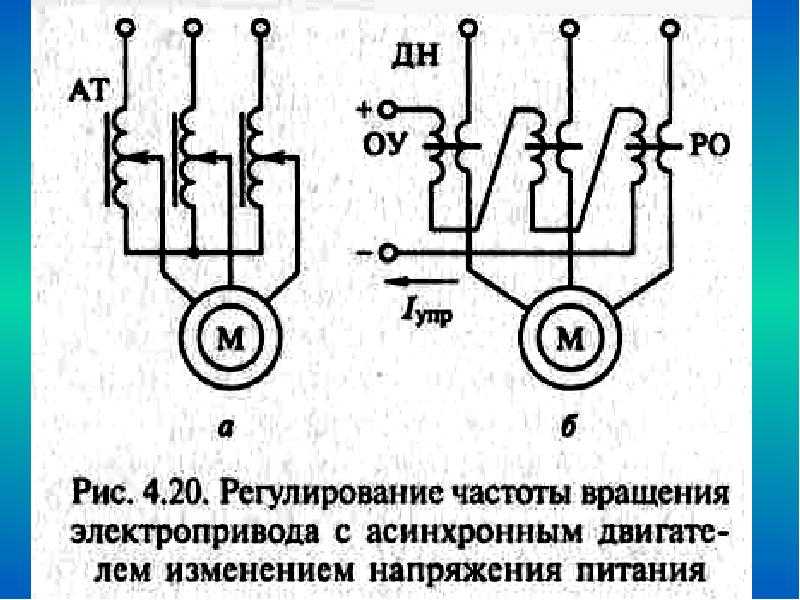 Управление скоростью с переключением полюсов в основном используется в асинхронных двигателях с короткозамкнутым ротором. Регулятор скорости с переключением полюсов имеет следующие характеристики:
Управление скоростью с переключением полюсов в основном используется в асинхронных двигателях с короткозамкнутым ротором. Регулятор скорости с переключением полюсов имеет следующие характеристики:
- Более прочные механические характеристики и хорошая стабильность
- Отсутствие потерь на скольжение и высокая эффективность
- Простое подключение, удобное управление и низкая цена
Но плавное регулирование скорости этим методом невозможно из-за большого перепада уклонов. Следовательно, его можно использовать с регулированием скорости по напряжению и электромагнитной фрикционной муфтой для получения более эффективной характеристики плавного регулирования скорости.
Этот метод подходит для производственного оборудования без плавного регулирования скорости, такого как металлорежущие станки, подъемники, краны, вентиляторы, водяные насосы и т.д.
Управление переменной скоростью скольжения
1. Изменение напряжения статора
Крутящий момент асинхронного двигателя пропорционален квадрату напряжения статора.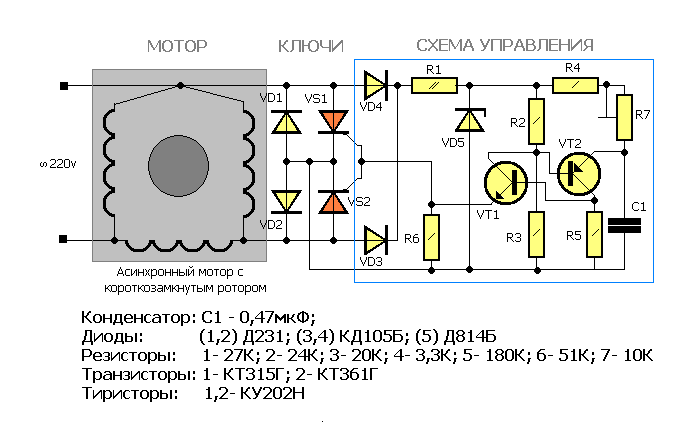 То есть изменение напряжения статора может изменить механическую характеристику и крутящий момент двигателя.
То есть изменение напряжения статора может изменить механическую характеристику и крутящий момент двигателя.
Этот метод не подходит для обычного двигателя с короткозамкнутым ротором, так как сопротивление его ротора очень мало и ток будет быстро возрастать на низкой скорости.
Но его можно использовать для асинхронного двигателя с обмоткой за счет последовательного сопротивления или частого варистора в цепи ротора, чтобы уменьшить нагрев двигателя.
2. Изменение сопротивления ротора
Этот метод регулирования скорости применим только к мотору с обмоткой. В цепи ротора асинхронного двигателя последовательно с сопротивлением при фиксированной нагрузке чем больше сопротивление, тем ниже скорость двигателя. Чем меньше сопротивление, тем выше скорость.
Этот метод прост, легок в управлении и требует небольших первоначальных инвестиций. Но мощность скольжения расходуется на сопротивление при нагреве. Он также имеет мягкие механические характеристики.
3. Каскадное управление скоростью
В настоящее время каскадное управление скоростью использует схему каскадного управления инвертором SCR и имеет следующие преимущества: усиление механических характеристик, низкое падение напряжения на выпрямителе, небольшое пространство, отсутствие вращающихся частей, низкий уровень шума, простота. поддержание. Это один из методов управления скоростью двигателя с обмоткой.
поддержание. Это один из методов управления скоростью двигателя с обмоткой.
У него есть и свой недостаток. То есть схема ротора оснащена дросселем для фильтра, поэтому коэффициент мощности низкий.
Регулирование скорости с переменной частотой
В соответствии с формулой скорости асинхронного двигателя видно, что когда скольжение s остается постоянным, скорость двигателя n в основном пропорциональна частоте сети f . Следовательно, изменение частоты f позволяет плавно регулировать скорость асинхронного двигателя. Изменение частоты питания является экономичным методом регулирования скорости, а также одним из самых популярных способов регулирования скорости асинхронного двигателя.
Регулирование скорости с переменной частотой — это способ изменить частоту сети статора двигателя, а затем изменить его синхронную скорость. Основным оборудованием системы частотно-регулируемого управления является преобразователь частоты или частотно-регулируемый привод (ЧРП), обеспечивающий преобразование частоты для источника питания.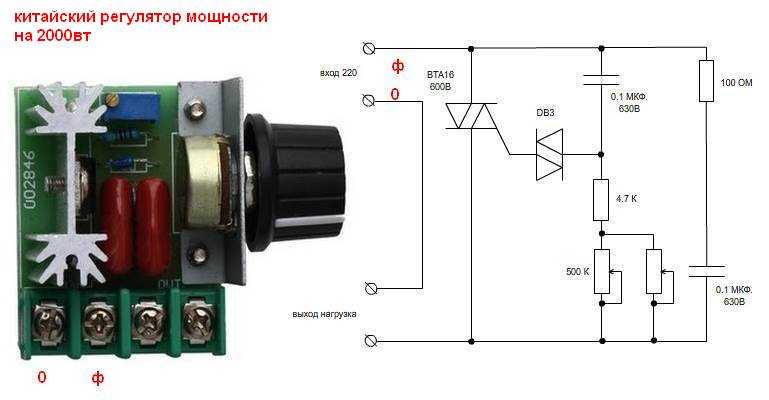 Преобразователи частоты можно разделить на две категории: ЧРП AC-DC-AC и ЧРП AC-AC.
Преобразователи частоты можно разделить на две категории: ЧРП AC-DC-AC и ЧРП AC-AC.
В настоящее время широко используемые частотно-регулируемые приводы используют цифровые технологии и стремятся к миниатюризации, высокой надежности и высокой точности. В приложениях он не только обладает значительной энергосберегающей производительностью, но также имеет следующую производительность:
- Высокоточная плавная регулировка скорости.
- Полная функция защиты, способная отображать неисправность путем самодиагностики и простого обслуживания.
- Пуск непосредственно от сети, с большим пусковым моментом и малым пусковым током, которые снижают воздействие на электросеть и оборудование, а также имеют функцию подъемного крутящего момента, что позволяет сэкономить устройство плавного пуска.
- Высокий коэффициент мощности и сохранение устройства компенсации конденсатора.
Регулирование скорости трехфазного асинхронного двигателя
Асинхронный двигатель широко используется в промышленности. Скорость асинхронного двигателя можно регулировать различными способами. В этой статье мы обсудим различные методы управления скоростью трехфазного асинхронного двигателя.
Скорость асинхронного двигателя можно регулировать различными способами. В этой статье мы обсудим различные методы управления скоростью трехфазного асинхронного двигателя.
Скорость асинхронного двигателя можно регулировать со стороны статора и ротора. Ниже перечислены различные методы управления скоростью асинхронного двигателя.
Управление со стороны статора: Скоростью асинхронного двигателя можно управлять со стороны статора путем изменения;
- Приложенное напряжение
- Используемая частота
- Количество полюсов статора
Управление со стороны ротора: Скоростью асинхронного двигателя можно управлять со стороны ротора путем изменения;
- Сопротивление ротора
- Каскадное соединение
- ЭДС впрыска в цепи ротора
- Система Шербиуса
Содержание
Регулирование скорости со стороны статора
Со стороны статора мы можем управлять асинхронным двигателем, изменяя различные величины.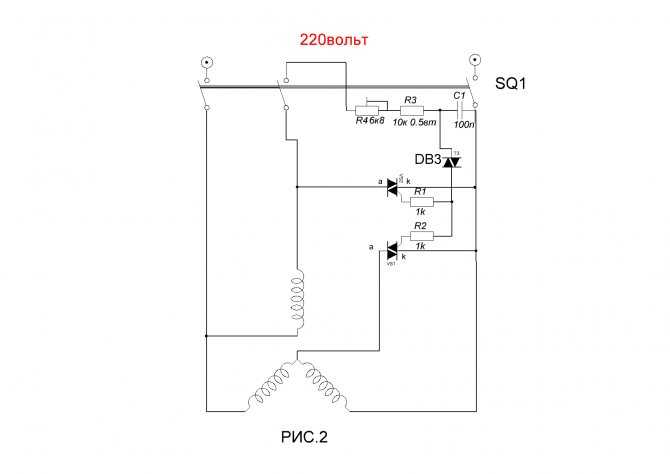 Эти методы кратко описаны ниже.
Эти методы кратко описаны ниже.
Управление скоростью путем изменения приложенного напряжения
Из уравнения крутящего момента асинхронного двигателя крутящий момент прямо пропорционален квадрату приложенного напряжения.
Скольжение при максимальном крутящем моменте не зависит от приложенного напряжения. А также изменение напряжения питания не меняет синхронную скорость.
На приведенном ниже рисунке показаны характеристики крутящий момент-скорость при изменении значений напряжения питания.
моментно-скоростная характеристикаСудя по вышеприведенным характеристикам, скорость может изменяться на небольшое значение за счет изменения большого значения напряжения для данной нагрузки.
Этот метод бесполезен по следующим перечисленным причинам;
Если напряжение изменяется больше, чем номинальное напряжение, это приведет к магнитному насыщению и может создать проблемы. В худшем состоянии сердечник двигателя будет поврежден.
При снижении напряжения питания развиваемый момент постепенно уменьшается.
Диапазон регулирования скорости очень ограничен от номинальной скорости до более низкого значения скорости.
Из приведенных выше причин можно сделать вывод, что управление скоростью изменением напряжения не популярно для больших двигателей. Но его можно использовать для очень маленьких двигателей.
Управление скоростью путем регулирования частоты
Уравнение синхронной скорости:
Изменяя частоту и количество полюсов, мы можем изменить синхронную скорость, и так далее мы можем изменить скорость вращения ротора.
Но уравнение напряжения асинхронного двигателя;
Теперь, при постоянном напряжении, если мы изменим частоту, изменится и поток. Следовательно, чтобы иметь достаточную перегрузочную способность, двигатель должен поддерживать постоянный магнитный поток на всем протяжении регулирования скорости.
Поэтому для асинхронных двигателей недостаточно только частотного регулирования.
Поток останется прежним, если V/f останется постоянным.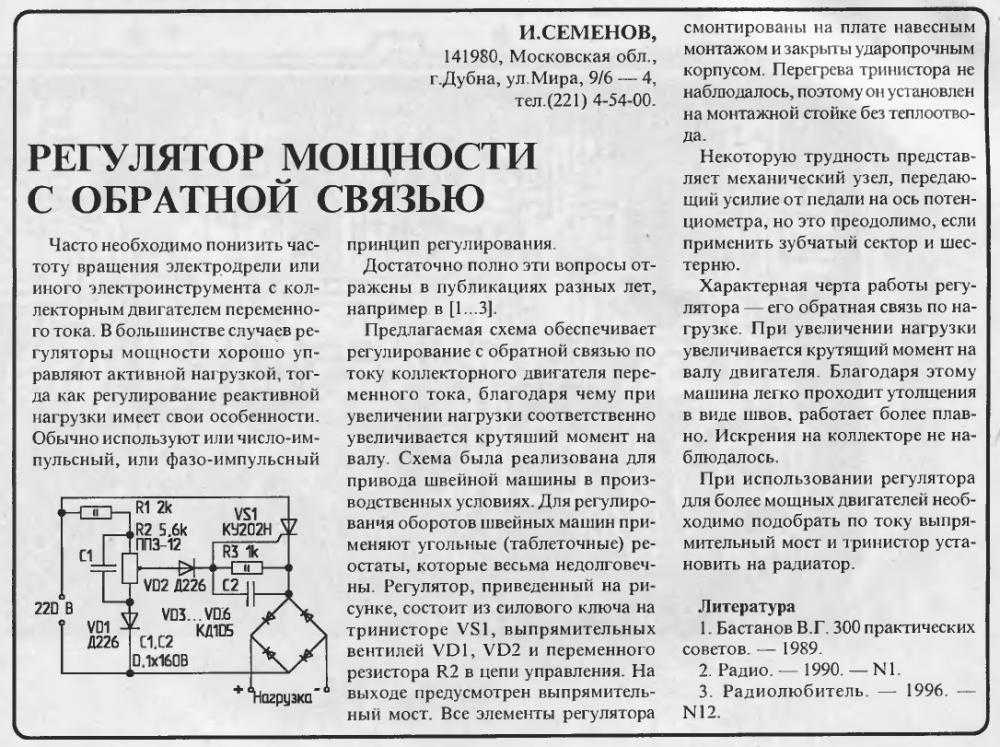 Таким образом, становится необходимым контролировать напряжение питания и частоту, чтобы соотношение было постоянным. Этот метод известен как V/f-метод управления скоростью.
Таким образом, становится необходимым контролировать напряжение питания и частоту, чтобы соотношение было постоянным. Этот метод известен как V/f-метод управления скоростью.
V/f-метод управления скоростью
Этот метод представляет собой комбинацию двух вышеуказанных методов.
В этом методе нам необходимо контролировать напряжение и частоту при условии, что отношение V/f остается постоянным.
На приведенном ниже рисунке показана кривая крутящий момент-скорость для переменной частоты с постоянным соотношением V/f.
Кривая крутящий момент-скорость для переменной частоты с постоянным соотношением V/fИз приведенных выше характеристик видно, что максимальный крутящий момент почти не меняется при более высокой частоте.
Таким образом, в уравнении напряжения
Источник питания переменной частоты может быть получен с помощью вращающегося преобразователя частоты. Генератор регулируемой частоты и инвертор звена постоянного тока.
Управление скоростью путем изменения числа полюсов статора
При методе управления скоростью с помощью изменения полюсов соединения обмотки статора изменяются таким образом, что каждый тип комбинации дает разное количество полюсов.
Уравнение синхронной скорости;
Из приведенного выше уравнения можно изменить синхронную скорость, изменив количество полюсов.
Этот метод применим только к асинхронному двигателю с короткозамкнутым ротором, поскольку этот двигатель подходит для любого числа полюсов статора при условии, что число полюсов в статоре равно числу полюсов в роторе.
В случае асинхронного двигателя с контактными кольцами трехфазная обмотка намотана на определенное число полюсов. Когда обмотка намотана на ротор, количество полюсов изменить нельзя.
Управление скоростью путем изменения количества полюсов статора Как показано на рисунке выше, количество полюсов уменьшается вдвое, и, следовательно, синхронная скорость удваивается.
Метод переключения полюсов используется для двигателей лифтов, тяговых двигателей и малых двигателей, используемых в приводных станках.
Способ управления скоростью со стороны ротора
Со стороны ротора для управления скоростью используются четыре метода. Эти методы перечислены ниже.
- Путем изменения сопротивления ротора
- Каскадный способ подключения
- Путем подачи ЭДС в цепь ротора
- Система Шербиуса
Теперь мы кратко обсудим эти методы.
Путем изменения сопротивления ротора
Скорость асинхронного двигателя можно изменить, изменив сопротивление ротора. В асинхронном двигателе с короткозамкнутым ротором стержни ротора закорочены концевыми кольцами. Следовательно, мы не можем добавить дополнительное сопротивление обмоткой ротора.
Но в случае асинхронного двигателя с контактными кольцами мы можем добавить дополнительное сопротивление обмотке ротора.
Если сопротивление ротора увеличивается, скорость двигателя уменьшается. Следовательно, скорость двигателя регулируется за счет управления сопротивлением ротора.
Следовательно, скорость двигателя регулируется за счет управления сопротивлением ротора.
Схема подключения метода сопротивления ротора показана на рисунке выше.
Основным преимуществом этого метода является то, что дополнительное сопротивление приводит к потере мощности. И это приводит к снижению эффективности.
Другим недостатком этого метода является плохое регулирование скорости при изменении нагрузки. Таким образом, этот метод применим только к приложениям, где изменения скорости необходимы в течение короткого периода времени.
Моментно-скоростные характеристики для различных значений сопротивления ротора показаны на рисунке ниже.
Характеристики крутящий момент-скорость для различных значений сопротивления ротораПреимущества:
- Может быть достигнута скорость ниже нормальной.
- Увеличивается пусковой момент из-за дополнительного сопротивления в цепи ротора.
Недостатки:
- Не подходит для двигателя с короткозамкнутым ротором.
- Большие изменения скорости невозможны.
- Потеря мощности из-за добавочного сопротивления I2R (снижается КПД).
- Дополнительное сопротивление требует масляного охлаждения.
- Скорость не может быть увеличена выше нормальной.
Каскадным соединением
При каскадном соединении два асинхронных двигателя соединяются на одном валу, как показано на рисунке ниже.
Метод каскадного соединенияОдин двигатель (Мотор-А) является основным двигателем, а второй двигатель известен как вспомогательный двигатель (Мотор-В). Обмотка статора основного двигателя подключена к сети питания, а обмотка статора вспомогательного двигателя питается от ротора основного двигателя.
N sa = Синхронная скорость двигателя-A
Где, P a = Число полюсов двигателя-A
Следовательно, скольжение двигателя-A;
Частота ЭДС ротора;
ЭДС, создаваемая в роторе двигателя-А с частотой f’, подается на статор двигателя-В.
Следовательно, его частота будет такой же, как f’. Эта ЭДС снова создает вращающееся магнитное поле, благодаря которому в роторе двигателя-Б возникает ЭДС.
N sb = Синхронная скорость двигателя-B
Где, P b = Число полюсов двигателя-B
Следовательно, скольжение двигателя-B;
Частота ЭДС ротора;
Для этого набора существует три возможных комбинации;
- Только двигатель-A подключен к источнику питания, и в этом случае N sa = 120f/P a
- Только двигатель-B подключен к источнику питания и в этом случае N сб = 120ф/п б
- Оба двигателя подключены каскадно.
В каскадном соединении есть два режима состояния; накопительный каскад и дифференциальный каскад.
В кумулятивном каскаде оба двигателя создают вращающееся поле в одном направлении. Следовательно, крутящий момент, создаваемый обоими двигателями, имеет одинаковое направление.
В дифференциальном каскаде направление вращающегося поля обоих двигателей противоположно. В этом случае последовательность фаз двигателя-В изменяется.
Синхронная скорость для накопительного каскада;
Синхронная скорость для дифференциального каскада;
Путем подачи ЭДС в цепь ротора
В этом методе ЭДС подается на частоте скольжения в цепь ротора с помощью внешнего источника. Таким образом, скорость двигателя регулируется путем управления ЭДС.
Если вводимая ЭДС противоположна ЭДС ротора, скорость уменьшается. И если введенная ЭДС имеет то же направление, что и ЭДС, индуцированная ротором, скорость увеличивается.
Этот метод состоит из двигателя постоянного тока и вращающегося преобразователя. Двигатель постоянного тока подключен к тому же валу, что и главный двигатель.
Вращающийся преобразователь используется для преобразования мощности переменного тока с низкой частотой скольжения в мощность постоянного тока. И эта мощность постоянного тока используется для привода двигателя. Энергия постоянного тока подается от коммутатора роторного преобразователя к коммутатору двигателя постоянного тока через щетки.
И эта мощность постоянного тока используется для привода двигателя. Энергия постоянного тока подается от коммутатора роторного преобразователя к коммутатору двигателя постоянного тока через щетки.
Скорость обоих двигателей регулируется реостатом переменного поля двигателя постоянного тока. Следовательно, когда сопротивление поля изменяется, постоянное напряжение двигателя и ротора соответственно изменяется. Следовательно, переменное напряжение ротора изменяется.
Здесь переменное и постоянное напряжение ротора имеют фиксированное соотношение. Этот метод управления скоростью имеет широкий диапазон и подходит для таких применений, как сталепрокатные заводы.
Схема этого метода показана на рисунке ниже.
Введение ЭДС в цепь ротораСистема Шербиуса
Метод Шербиуса для управления скоростью асинхронного двигателя подходит для машин большой мощности. Принципиальная схема метода Шербиуса представлена на рисунке ниже.
Система Шербиуса В этом методе управления скоростью главный асинхронный двигатель подключается к трехфазной сети.
