Как работает регулятор мощности на микроконтроллере PIC16F676. Какие особенности имеет схема регулятора. Где можно применять такой регулятор мощности. Как запрограммировать микроконтроллер для работы регулятора.
Принцип работы регулятора мощности на PIC16F676
Регулятор мощности на микроконтроллере PIC16F676 позволяет плавно управлять мощностью нагрузки, подключенной к сети 220В переменного тока. Основные принципы работы такого регулятора:
- Микроконтроллер генерирует ШИМ-сигнал для управления симистором
- Симистор открывается на определенное время каждого полупериода сетевого напряжения
- Изменяя время открытия симистора, регулируется мощность, подаваемая на нагрузку
- Оптопара обеспечивает синхронизацию с сетью и гальваническую развязку
- Кнопки позволяют задавать нужный уровень мощности
- Индикатор отображает текущую мощность в процентах
Особенности схемы регулятора на PIC16F676
Схема регулятора мощности на PIC16F676 имеет следующие ключевые особенности:
- Компактность — основные функции выполняет микроконтроллер
- Высокая точность регулировки за счет ШИМ
- Плавный пуск нагрузки при включении
- Энергонезависимая память для сохранения настроек
- Защита от помех благодаря оптронной развязке
- Возможность регулировки в широком диапазоне мощностей
Области применения регулятора мощности
Регулятор мощности на PIC16F676 может использоваться для управления различными нагрузками:
- Регулировка яркости ламп накаливания и галогенных ламп
- Управление нагревательными элементами (ТЭНы, паяльники)
- Регулировка мощности электроинструмента (дрели, шлифмашинки)
- Плавное управление вентиляторами и насосами
- Регулировка температуры в нагревательных приборах
- Диммирование светодиодных светильников через драйвер
Программирование микроконтроллера PIC16F676
Для работы регулятора мощности необходимо запрограммировать микроконтроллер PIC16F676. Основные этапы программирования:
- Написание программы на C или ассемблере
- Компиляция кода в hex-файл прошивки
- Подключение программатора к микроконтроллеру
- Загрузка hex-файла в память PIC16F676
- Настройка конфигурационных битов микроконтроллера
В программе реализуются алгоритмы генерации ШИМ, обработки нажатий кнопок, вывода на индикатор и другие необходимые функции регулятора мощности.
Преимущества использования PIC16F676 в регуляторе
Микроконтроллер PIC16F676 имеет ряд преимуществ для применения в регуляторе мощности:
- Низкое энергопотребление
- Наличие встроенного ШИМ-модуля
- 10-битный АЦП для точных измерений
- Внутренний генератор на 4 МГц
- Небольшие размеры корпуса
- Доступная цена
Эти особенности позволяют создать компактный и функциональный регулятор мощности на одном микроконтроллере.
Советы по сборке регулятора мощности
При самостоятельной сборке регулятора мощности на PIC16F676 следует учитывать несколько важных моментов:
- Использовать качественные компоненты, особенно симистор и оптопару
- Обеспечить хорошее охлаждение симистора при больших мощностях
- Тщательно развести печатную плату, разделив силовые и сигнальные цепи
- Применить помехоподавляющие цепи для защиты от сетевых помех
- Надежно изолировать все части схемы, находящиеся под сетевым напряжением
- Использовать предохранитель для защиты от короткого замыкания
Соблюдение этих рекомендаций позволит собрать надежный и безопасный регулятор мощности.

Настройка и калибровка регулятора
После сборки регулятор мощности на PIC16F676 требует настройки и калибровки:
- Проверка работы всех узлов схемы
- Настройка синхронизации с сетью через оптопару
- Калибровка шкалы регулировки мощности
- Настройка плавности регулировки
- Проверка работы защитных функций
- Тестирование на различных типах нагрузки
Правильная настройка обеспечит точную и стабильную работу регулятора мощности в широком диапазоне нагрузок.
Возможные доработки регулятора мощности
Базовую схему регулятора на PIC16F676 можно улучшить, добавив дополнительные функции:
- Дистанционное управление через ИК-пульт
- Подключение внешнего датчика температуры
- Добавление таймера включения/выключения
- Реализация нескольких предустановленных режимов работы
- Управление по сети Wi-Fi или Bluetooth
- Расширение диапазона регулируемых мощностей
Эти доработки позволят сделать регулятор более универсальным и удобным в использовании.
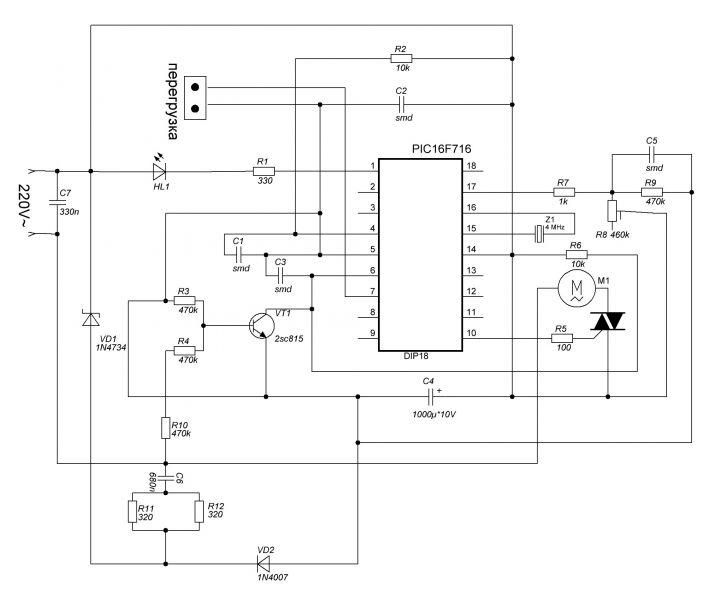
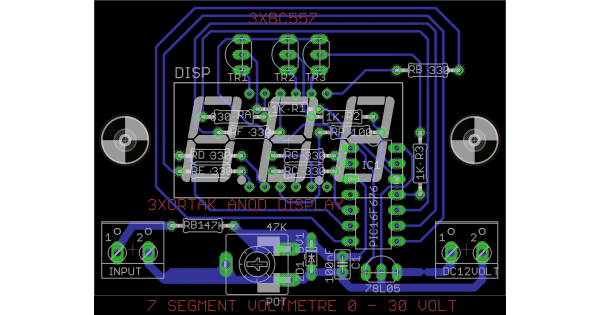
Регулятор мощности с фазовым управлением симистором на микроконтроллере PIC16F84A
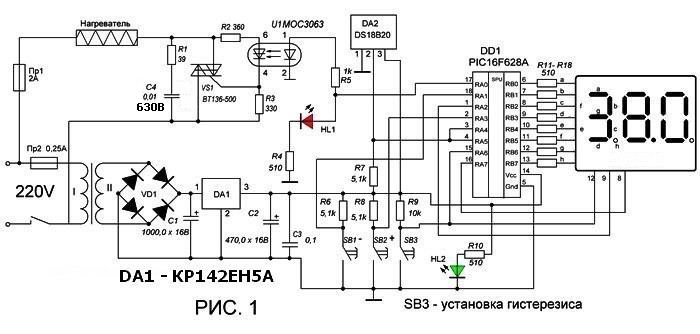
егулятор предназначен для плавного управления мощностью активнойнагрузки, питающейся от сети переменного тока 220 вольт частотой 50 Гц.Мощность нагрузки зависит от типа применяемого симистора. В основуметода управления положен принцип фазового регулирования моментавключения симистора, включенного последовательно с нагрузкой.
Фото регулятора представлены на риснках :
В момент включения мощность на нагрузке нарастает плавно, что удобно,если регулятор будет использоваться для регулирования яркости лампыосвещения. Вообще область применения регулятора самая широкая.
Основнымэлементом регулятора является микроконтроллер PIC16F84A.По входу RB0 микроконтроллера организовано прерывание в момент переходасетевого напряжения через ноль. Перепад на этом выводе формирует узелна оптопаре U1 (АОУ110Б). От момента прерывания программно организованазадержка включения симистора, которая меняется в определённых пределах.На светодиодном индикаторе это выглядит как регулирование мощности от 0до 99%.
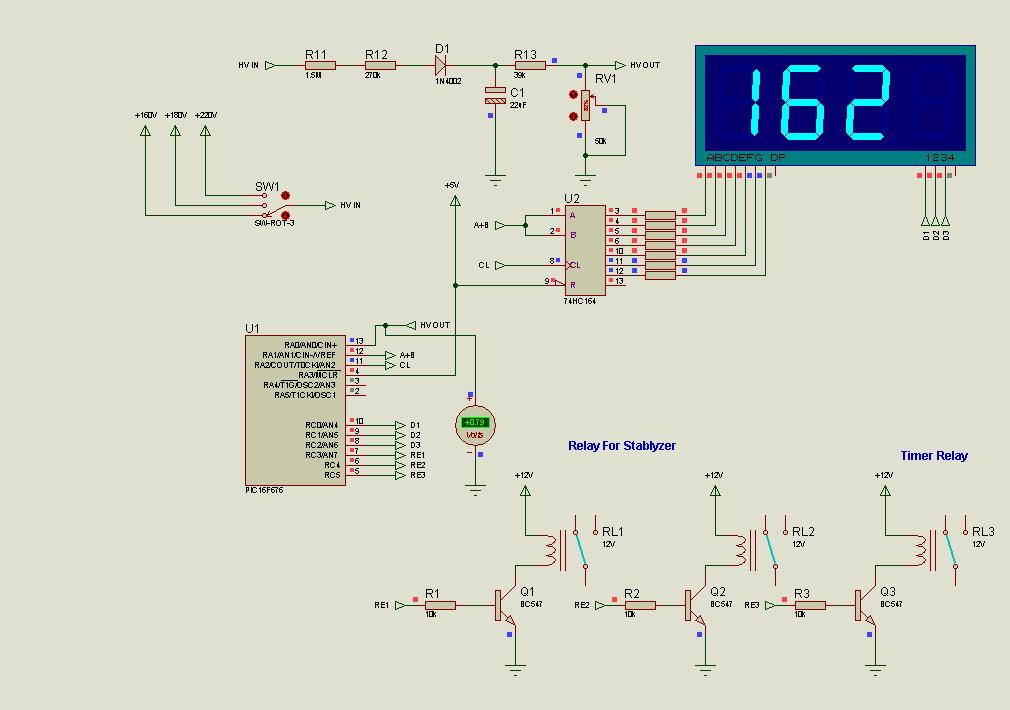
Схема регулятора мощностипредставлена на рисунке :
Погрешность соответствия показаний индикатора и действительной мощностиподводимой к нагрузке вполне достаточная для применения регулятора длябытовых целей. Кнопки S1 и S2 служат дляувеличения и уменьшения мощности соответственно. В подпрограмме опросакнопок организовано несколько режимов, удобных в пользовании, приоднократном нажатии изменение на единицу значения, при долгом нажатиибыстрое изменение и очень быстрое.
Узел управления симисторомсостоит из элементов U2, VD3, R5, стандартное схемное решение,оптотиристор U2 (АОУ103В) обеспечивает гальваническую развязку и спомощью диодного моста VD3 (W08) управление симистором VS1.
Схема питается от сети черезтрансформатор T1. Далее напряжение выпрямляется диодным мостом VD2,часть напряжения поступает на оптопару U1, для формированияперепада перехода сетевого напряжения через ноль, остальная часть черездиод VD1 на микросхему стабилизатора IC1, которая стабилизируетнапряжение до 5 вольт.
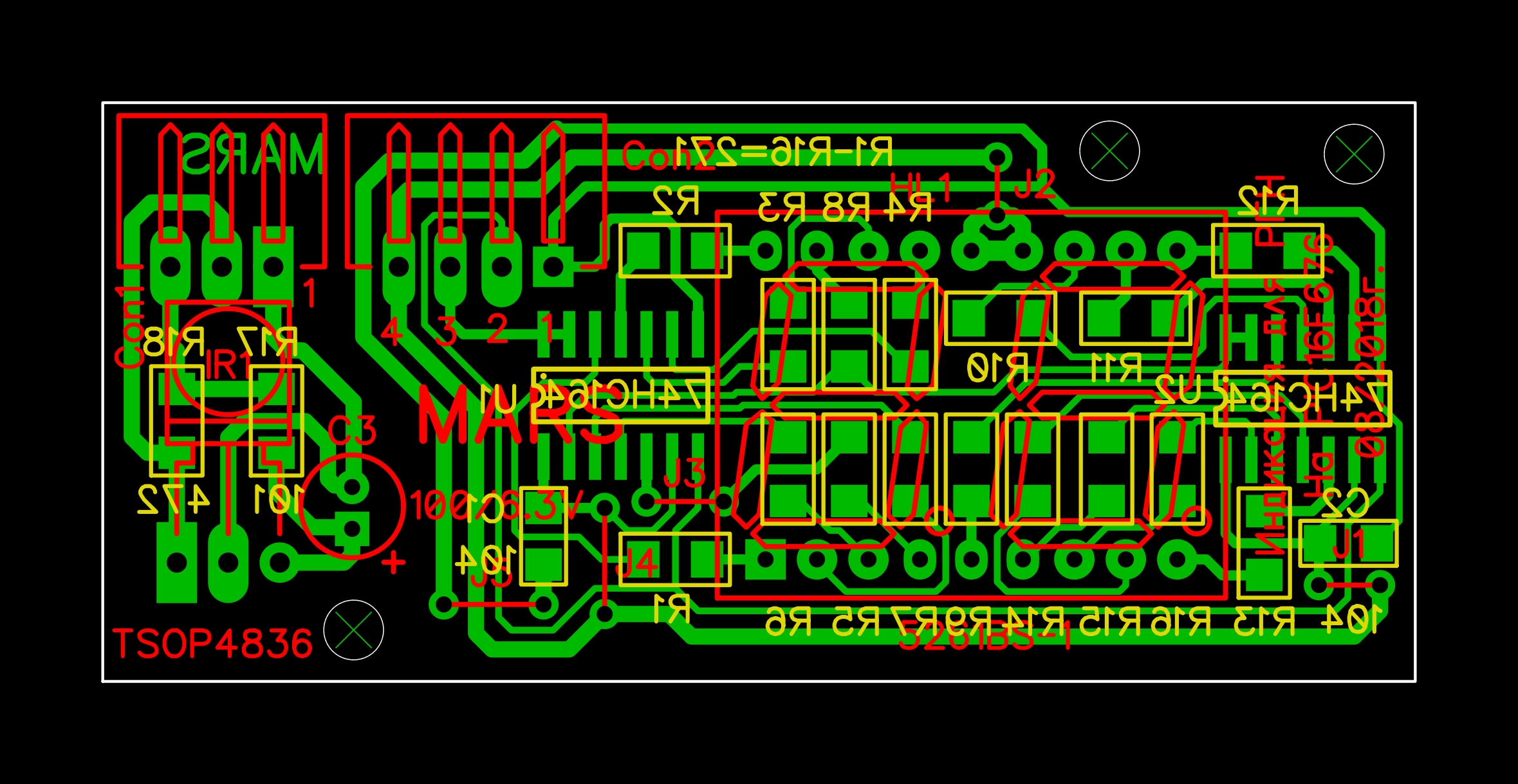
Печатные платы в формате LAY:
печатная плата PicPower
плата управлениясемистором
Прошивка для микроконтроллера PIC16F84A в HEX формате :PicPower.rar
Та-же прошивка в формате программы ProgCode : PicPower.sfr
Автор конструкции: Юрий Стрижаков
Связаться с автором можно по email (указан на схеме)
Регулятор оборотов микродрели на pic-контроллере CAVR.ru
Регулятор оборотов микродрели на pic-контроллере CAVR.ru Рассказать в:В радиолюбительской практике одним из самых важных инструментов является дрель. В качестве миниатюрных электродрелей для сверления плат часто используются двигатели постоянного тока с приделанным микровыключателем на рукоятке. Питание на такую микроэлектродрель подается от внешнего блока питания. В большинстве случаев обороты электромотора не регулируются, а чтобы «сверлилка» лучше работала, на нее подается завышенное напряжение питания. Это приводит к преждевременному выходу со строя электромотора. Еще одним слабым звеном устройства является кнопка включения. Это и не удивительно, если учесть, что пусковой ток электромотора может достигать 3 А и более.Эти недостатки побудили разработать регулятор оборотов на современном микроконтроллере ф.Microchip PIC16F627/628. Важной особенностью данной модели микроконтроллера является наличие внутреннего двухскоростного RC-генератора. Используя эту особенность, в процессе выполнения программы можно переключать тактовую частоту микроконтроллера с 4 МГц на 32 кГц и наоборот. Данная микросхема содержит также встроенный широтно-импульсный модулятор (ШИМ), что позволяет реализовать весь диапазон регулировки оборотов. Коэффициент заполнения импульсов (величина, обратная скважности) меняется от 0 до 1. Это позволяет построить очень эргономичное устройство практически на одной микросхеме с минимальным количеством внешних компонентов.
Технические характеристики
Напряжение питания, В 8…25
Ток потребления устройством в рабочем режиме
(зависит от мощности электромотора), А 0.5…3
Ток потребления в ждущем режиме работы, мА < 1
Частота работы ШИМ, кГц 15
Коэффициент заполнения ШИМ 0.4…1
Количество ступеней регулировки напряжения на электродвигателе 50
Плавность регулировки скважности ШИМ, ступени/с 2
К выводам 18, 7 и 8 микроконтроллера (рис.1) подключены кнопки управления устройством. Следует отметить, что от электромотора и соединительного шлейфа во время работы идет довольно солидное электромагнитное излучение, которое может привести к самопроизвольному срабатыванию кнопок SB2 и SB3. Для предотвращения этого используются блокировочные конденсаторы С4 и С5, которые шунтируют высокочастотные наводки на выводах кнопок. Цепь R2-VD2 представляет собой простейший параметрический стабилизатор, снижающий уровень напряжения, которое подается с кнопки SB1 на цифровой вход микроконтроллера, до стандартных TTL-уровней сигнала. Резистор R3 формирует на
выводе 18 DD1 уровень логического «О» в то время, когда кнопка SB1 отпущена. Светодиод HL1 отображает режимы работы устройства.
ШИМ-сигнал с выхода микроконтроллера через резистор R4 подается на составной транзистор VT1, VT2. Коллекторы транзисторов подсоединены к одному из полюсов электромотора. Электромотор подключается к устройству при помощи трехпроводного шлейфа. Два провода используются для подачи питания, третий — для приема сигнала от кнопки «Пуск». Напряжение питания на двигателе зависит от коэффициента заполнения ШИМ-сиг-нала. Стабилизатор на микросхеме DA1 обеспечивает питанием микроконтроллер. Конденсаторы С1 и С2 используются для фильтрации высокочастотных помех, поступающих как с блока питания, так и от самого электромотора. Для этих же целей установлен конденсатор СЗ, включенный параллельно полюсам питания электромотора. Диод VD1 гасит токи самоиндукции, которые появляются в цепи питания электромотора при работе.
Подробно разобраться в принципах работы устройства поможет схема алгоритма, представленная на рис.2. В соответствии с ним сразу после старта программы микроконтроллер проходит начальную инициализацию. Во время инициализации настраиваются порты микроконтроллера, таймеры (счетчики), и переключается тактовая частота с 4 МГц на 32 кГц. После этого микроконтроллер входит в программный цикл ожидания нажатия кнопки «Пуск» (SB1). В этом цикле также происходит обработка прерывания по переполнению таймера-счетчика 2, которое используется для задания периодов работы светодиодаНL1.
После нажатия кнопки SB1 программа микроконтроллера сразу же переключает частоту тактирования с 32 кГц на 4 МГц и проводит инициализацию внутреннего ШИМ-контрол-лера. Далее процессор читает сохраненное ранее в энергонезависимой памяти (EEPROM) значение длительности импульса ШИМ и записывает его в соответствующий служебный регистр. Проделав все эти операции, микроконтроллер запускает ШИМ и снова оказывается в программном цикле ожидания нажатия кнопок SB2, SB3, либо отпускания кнопки SB1.
При нажатии кнопки SB2 (SB3) микроконтроллер увеличивает (уменьшает) длительность импульса ШИМ, и тем самым изменяет напряжение, прикладываемое к электромотору. После каждого изменения длительности импульса ШИМ текущее значение сохраняется в виде константы в энергонезависимой памяти микроконтроллера (EEPROM). Это позволяет не проводить начальную настройку скорости вращения «сверлилки» каждый раз при начале работы. Если же программа обнаруживает, что кнопка SB1 отпущена, микроконтроллер сразу же переходит на программную ветвь завершения работы ШИМ-регулятора. В этой ветви производится выключение ШИМ (на выводе 9 DD1 устанавливается низкий уровень), и микроконтроллер снова переходит в цикл ожидания нажатия кнопки «Пуск». Дальше алгоритм работы устройства повторяется.
Управляющая программа микроконтроллера приведена в табл.1, а карта прошивки — в табл.2. Основные ее задачи — сканирование кнопок и управление ШИМ-сигналом.
Благодаря наличию в данном микроконтроллере регистра периода ШИМ, можно задать практически любую его частоту. В данном устройстве из практических соображений частота ШИМ выбрана около 15 кГц (точное значение зависит от частоты внутреннего RC-генератора). Коэффициент заполнения (К3), как уже упоминалось выше, можно задать от 0 до 1. Но практика показала, что большинство электромоторов при К3 меньше 0,4 не вращаются. По этой причине диапазон возможных К3 в данной программе составляет 0,4.. 1. Программа обеспечивает дискретное изменение К3 (50 ступеней) при нажатии соответствующих кнопок управления.
Устройство управляется с помощью трех кнопок SB1.. SB3. При помощи кнопки SB1 осуществляется включение и выключение электромотора (пока эта кнопка нажата, мотор вращается). Кнопка SB2 увеличивает обороты, a SB3 — уменьшает. Каждое изменение оборотов запоминается в энергонезависимой памяти микроконтроллера. Поэтому при следующем включении питания электродвигатель вращается со скоростью, заданной раньше.
Когда электродрель выключена, микроконтроллер находится в режиме энергосбережения (частота RC-генератора — 37 кГц), и ток потребления составляет менее 1 мА. О данном режиме сигнализирует светоди-Од HL1, который неравномерно мигает (с интервалом в 3 с). После пуска электромотора кнопкой SB1 светоди-од гаснет Изменение К3 можно производить только при включенном электромоторе. Все нажатия кнопок SB2 и SB3 подтверждаются миганием светодиода HL1. Если во время регулировки оборотов достигнут верхний либо нижний предел, светодиод HL1 перестает мигать, сигнализируя о том, что регулятором достигнут предел регулировок.
Устройство собрано на плате размерами 55×38 мм (рис.3). На одном ее конце сверлят три отверстия, в которые впаивают выводы шлейфа питания электромотора, длина которого может быть 0,5… 1 м. На корпусе электромотора в удобном месте монтируют кнопку SB1, а также блокировочный конденсатор СЗ и импульсный диод VD1. В описываемом устройстве используется микроконтроллер PIC16F627 или PIC16F628.
 Без какой-либо коррекции программы возможно замена на PIC16F627A, PIC16F628A или PIC16F648A, которые в большинстве случаев стоят дешевле. Основное различие между этими тремя микроконтроллерами заключается в разном объеме памяти программ. Так, у PIC16F627/627A объем памяти программ составляет 1024 слова, у PIC16F628/628A — 2048 слова, а у PIC16F648A — 4096 слов. Кроме того, PIC16F648A имеет больший объем ОЗУ и EEPROM (по 256 байт). Саму микросхему микроконтроллера выгодно установить в плату на «панельке». Это позволяет модернизировать устройство, не прибегая к паяльнику, т.к. в любое время можно вынуть микроконтроллер и запрограммировать его обновленным программным обеспечением.
Без какой-либо коррекции программы возможно замена на PIC16F627A, PIC16F628A или PIC16F648A, которые в большинстве случаев стоят дешевле. Основное различие между этими тремя микроконтроллерами заключается в разном объеме памяти программ. Так, у PIC16F627/627A объем памяти программ составляет 1024 слова, у PIC16F628/628A — 2048 слова, а у PIC16F648A — 4096 слов. Кроме того, PIC16F648A имеет больший объем ОЗУ и EEPROM (по 256 байт). Саму микросхему микроконтроллера выгодно установить в плату на «панельке». Это позволяет модернизировать устройство, не прибегая к паяльнику, т.к. в любое время можно вынуть микроконтроллер и запрограммировать его обновленным программным обеспечением. Поскольку ток потребления электромотора может быть довольно большим, транзистор VT2 желательно установить на теплоотвод размерами не менее 40×40 мм (я использовал теплоотвод от блока разверток старого телевизора). Транзистор VT2 подбирается по мощности используемого мотора, например, КТ817 имеет рассеваемую мощность с теплоот-водом 20 Вт, а КТ819 — 60 Вт [1, 2]. В моем устройстве работает электромотор типа ДПМ-25-03.
В некоторых случаях необходимо, чтобы электродрель плавно набирала обороты при пуске (например, при сверлении отверстий в платах без кернения). Для таких случаев разработан второй вариант программы (карта прошивки — в табл.3).В электронном виде таблицы можно найти по адресу http //radio-mir.comАРХИВ:СкачатьПОТАПЧУК,
г.Ровно, Украина. E-mail: [email protected]
Раздел: [Схемы]
Сохрани статью в:
Оставь свой комментарий или вопрос:
Регулятор оборотов двигателя pic16f628
Регулятор оборотов микродрели на PIC-контроллере
ПОТАПЧУК,
г.Ровно, Украина. E-mail: [email protected]
В радиолюбительской практике одним из самых важных инструментов является дрель. В качестве миниатюрных электродрелей для сверления плат часто используются двигатели постоянного тока с приделанным микровыключателем на рукоятке. Питание на такую микроэлектродрель подается от внешнего блока питания. В большинстве случаев обороты электромотора не регулируются, а чтобы «сверлилка» лучше работала, на нее подается завышенное напряжение питания. Это приводит к преждевременному выходу со строя электромотора. Еще одним слабым звеном устройства является кнопка включения. Это и не удивительно, если учесть, что пусковой ток электромотора может достигать 3 А и более.
Питание на такую микроэлектродрель подается от внешнего блока питания. В большинстве случаев обороты электромотора не регулируются, а чтобы «сверлилка» лучше работала, на нее подается завышенное напряжение питания. Это приводит к преждевременному выходу со строя электромотора. Еще одним слабым звеном устройства является кнопка включения. Это и не удивительно, если учесть, что пусковой ток электромотора может достигать 3 А и более.
Эти недостатки побудили разработать регулятор оборотов на современном микроконтроллере ф.Microchip PIC16F627/628. Важной особенностью данной модели микроконтроллера является наличие внутреннего двухскоростного RC-генератора. Используя эту особенность, в процессе выполнения программы можно переключать тактовую частоту микроконтроллера с 4 МГц на 32 кГц и наоборот. Данная микросхема содержит также встроенный широтно-импульсный модулятор (ШИМ), что позволяет реализовать весь диапазон регулировки оборотов. Коэффициент заполнения импульсов (величина, обратная скважности) меняется от 0 до 1. Это позволяет построить очень эргономичное устройство практически на одной микросхеме с минимальным количеством внешних компонентов.
Источник
ШИМ регулятор оборотов двигателя постоянного тока на PIC16f628
Данный ШИМ регулятор оборотов двигателя позволяет при помощи двух кнопок изменять скорость вращения вала двигателя постоянного тока. Хотя его с успехом можно применить и для управления яркостью лампы накаливания или в качестве регулятора температуры паяльника.
Описание работы ШИМ регулятора оборотов двигателя
Выбор подаваемой мощности производится ступенчато через каждые 10 %. Ниже приведен график работы схемы.
Частота работы ШИМ регулятора составляет 100 Гц, соответственно при 10% мощности длинна импульса составляет 1 мсек, пауза равна 9 мсек. Для 20 % импульс равен 2 мсек, пауза 8 мсек и так далее. Параллельно при выборе необходимого уровня на семи-сегментном индикаторе отображается соответствующей значение: 0,1,2,3,4,5,6,7,8,9,1- ( 1- :100%)
Большим преимуществом использования этого типа регулирования оборотов двигателя является то, что энергия практически не теряется в схеме регулятора, так как транзистор работает только в режиме отсечки и насыщения.
В схеме ШИМ регулятора оборотов двигателя предусмотрен режим записи в энергонезависимую память микроконтроллера PIC12f629 значения выбранного уровня мощности.
При выключении питания схемы, напряжение на выводе 18 PIC16f628 пропадает, это дает сигнал микроконтроллеру, что необходимо записать значение в память. Заряда в конденсаторе C2 хватает, чтобы выполнить данную операцию. Поэтому данный конденсатор не следует ставить меньшей емкости.
Скачать прошивку (34,3 KiB, скачано: 1 024)Источник
Регулятор мощности паяльника с возможностью отключения и таймером на PIC16F628
Дата публикации: 02 сентября 2012 .
Регулятор позволяет дискретно изменять мощность инерционной нагрузки, паяльника(как в станции lukey), электрообогревателя. Регулятор собран на микроконтроллере PIC16F628.
Регулировка происходит за счет пропуска части периодов сетевого напряжения. Так при установке значения уровня мощности «0», регулятор подключает нагрузку на один период, потом следует пауза в 15 периодов. При установке уровня мощности «1», нагрузка подключается на 2 периода с паузой в 14 периодов. При выставленном уровне «15», нагрузка подключена постоянно.
Так как переключение симистора происходит в момент перехода сетевого напряжения через «0», уровень помех создаваемых регулятором – минимальный. Установленный уровень мощности отображается на цифровом светодиодном индикаторе в виде цифр от 0 до 9 и букв ABCDEF.
Для изменения мощности, необходимо нажать и удерживать соответствующею кнопку.При выключении питания, установленный уровень сохраняется во внутренней памяти микроконтроллера.
Одновременное нажатие и удержание двух кнопок, вызывает отключение нагрузки. При этом индикатор уровня начинает мигать. Так же осуществляется и последующее включение.
Также имеется таймер времени работы устройства. После включения устройства, через 2 часа происходит автоматическое отключение нагрузки. Повторное включение производится нажатием и удержанием двух кнопок одновременно или кратковременным отключением регулятора от сети.
Повторное включение производится нажатием и удержанием двух кнопок одновременно или кратковременным отключением регулятора от сети.
Источник
Универсальный ШИМ контроллер на PIC16F628 + LCD
Дата публикации: 29 января 2012 .
Представленный в статье ШИМ контроллер подходит для очень широкого спектра применения. Основным элементом управления, используемым для настройки контроллера является поворотный энкодер. Также есть переключатель для выбора режимов работы: «Выключено», «ШИМ» и «Полная мощность». Текущие настройки системы отображаются на стандартном ЖК-дисплее(HD44780) с двумя рядами из шестнадцати символов.Основа схемы это микроконтроллер PIC16F628 (также может быть использован PIC16F628A). Выходной каскад, состоящий из двух силовых полевых транзисторов IRF9540 которые соединены параллельно, и сдвоенных диодов BYW32, позволяет легко управлять двигателями постоянного тока с напряжением до 24В и номинальными токами до 10А. Схема способна работать при более высоких токах, но тогда особое внимание должно быть уделено площади поперечного сечения проводников и дорожкам на плате, к которым можно припаять провода параллельно с ними.
Полезная функция в данном приборе является — «Функция повышения» (Boost), которая помогает надежно запускать двигателя постоянного тока. При запуске выход включен на полную мощность на определенный промежуток времени, независимо от настроек ШИМ.
По соображениям безопасности, при включении контроллера необходимо установить переключатель в положение «Выключено», а затем в положение «ШИМ» или «Полная мощность». Это означает, что подключенный к контроллеру двигатель не запустится при восстановлении подачи питания.
В рабочем режиме на дисплее отображаются частота ШИМ(kHz) и коэффициент заполнения импульса ШИМ (Скважность) в процентах. Скважность можно регулировать поворачивая ручку энкодера.
Режим «Выключено» — переключатель в положении «B», режим «Полная мощность» — положение «А», режим «ШИМ» — переключатель не установлен.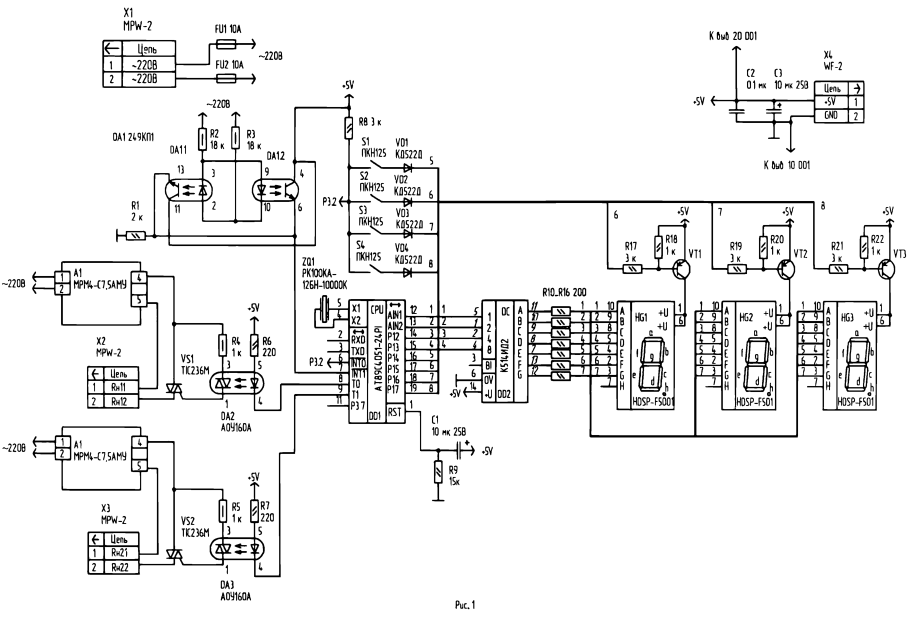 Основные параметры могут быть установлены в меню настроек. В это меню можно войти путем установки переключателя режимов в положение «Выключено», и удержания в нажатом состоянии кнопки энкодера в течение нескольких секунд.
Основные параметры могут быть установлены в меню настроек. В это меню можно войти путем установки переключателя режимов в положение «Выключено», и удержания в нажатом состоянии кнопки энкодера в течение нескольких секунд.
Меню включает в себя следующие опции:
Boost: вкл/выкл
Boosttime: 1 секунда / 2 секунды / 5 секунд
Частота ШИМ: 1кHz / 2kHz / 5 кHz
Шаг регулировки ШИМ: 1% / 2% / 5% / 10%
Для выхода из меню выбрать «Выход». Параметр «Шаг регулировки ШИМ» определяет на сколько процентов будет увеличиваться или уменьшаться скважность ШИМ в рабочем режиме. Все настройки сохраняются в EEPROM и не теряются при выключении питания.
Вариант печатной платы
Фото готового устройства. Автор Rozario
Источник
Adblockdetector
Регулятор мощности на PIC16F84A / Приборы / МодноНемодно.ру
Недавно ко мне обратился сосед по подъезду с просьбой посмотреть, почему перестал работать его импортный калорифер на 1,5 кВт. Я по-соседски согласился.
Оказалось, что прогорел контактный регулятор, действие которого основано на свойстве биметаллической пластины изгибаться при протекании тока нагрузки в одну сторону, разрывая контакты при достижении определённой температуры (тепловое реле), а при охлаждении — вновь замыкать силовую цепь.
Биметаллическая пластина, имевшая пружинящие свойства, превратилась в «промокашку», а один из контактов вообще отгорел. Как технарь, всю свою трудовую деятельность борющийся с контактными системами, я предложил соседу изготовить для его иномарки самодельный бесконтактный регулятор мощности.
Доверяя моему опыту (он не впервые обратился ко мне с аналогичной просьбой), сосед дал «добро».
Внешний вид собранного регулятора мощности:
За основу была взята принципиальная схема, изображённая на фотографии:
Схема была подвергнута некоторым изменениям, коснувшихся силового блока. Подробнее об этом будет описано в статье ниже.
Подробнее об этом будет описано в статье ниже.
Вот что получилось у меня спустя двое суток технического творчества:
Это внешний вид платы регулятора мощности. На цифровом индикаторе показание «99», что соответствует максимальной мощности, подаваемой в нагрузку.
Нагрузкой может быть любой нагревательный элемент мощностью до 5 кВт, даже лампа накаливания или группа из них, так как этот регулятор имеет фазовое управление, простым языком — он плавно регулирует яркость лампы в диапазоне 0…99% двумя кнопками «>» и «<«, а при включении регулятора обеспечивает плавное увеличение яркости лампы от 0 до максимального значения, тем самым значительно продлевая срок её службы.
Для дотошных критиков качества паек привожу внешний вид платы управления со стороны печати:
Качество паек, соглашусь, не идеальное, зато надёжное. Не зря мои приборы, собранные несколько десятков лет назад, продолжают исправно функционировать.
Есть, например, такое этому доказательство: недавно ко мне обратился бывший мой заказчик электромузыкального звонка на 64 мелодии, который (звонок) исправно выполнял свои функции в течение 14,5 лет. Он бы и продолжал трудиться, но его хозяин при ремонте квартиры уронил бедолагу на пол. В присутствии его хозяина я обнаружил оторвавшийся провод, который тут же припаял — и звонок радостно исполнил очередную мелодию «По долинам и по взгорьям».
Основной этап сборки регулятора мощности иллюстрирует фотография:
На ней видны: сверху — плата управления, на которой вверху уютно расположился в своей «кроватке» микроконтроллер PIC16F84A, слева от 2-разрядного индикатора HDSP-5621, интегральный стабилизатор 7805, ниже индикатора — оптронный транзистор АОТ-110Б и прочие комплектующие.
Внешний вид регулятора мощности, собранного в корпусе от электронных часов, и изображённго на переднем плане пультом управления от телевизора, приведён на фотографии:
Лампа накаливания без миганий горит при 15%-й уставке выходной мощности.
Исходником — исходным текстом программы на языке ассемблер для PIC-контроллеров — со мной любезно поделился отличный радиолюбитель и человек из г. Тынды.
Неплохо зная этот язык программирования, я доработал и исходник, который в первоначальном варианте был рассчитан для работы только на активную нагрузку, и силовой блок.
У автора из Тынды используется «несерьёзный» симистор BT139, я же применил силовой модуль импортного производства, представляющий собой сдвоенный динистор на 55 А, 800 В, соединив силовую структуру динистора встречно-параллельно. Получился аналог мощного симистора, который даже без радиатора может коммутировать нагрузку с током больше 30 А. Не зря в корпусе я закрепил розетку с основанием из фарфора — материала, способного выдерживать значительные температуры.
Мой сосед в очередной раз остался доволен моим изделием, заплатив мне неплохие для меня деньги. Я — удовлетворён своей работой и оплатой за него.
Тем, кто заинтересуется этим прибором для самостоятельного повторения, я могу выслать всю документацию (принципиальную схему, фотошаблон, исходник или файл для прошивки микроконтроллера и более конкретные рекомендации по изготовлению на их электронный адрес.
Регулятор мощности двигателя постоянного тока. Схема, плата, прошивка. — PIC — Статьи — Каталог статей
За время эксплуатации устройства описанной в статье внесены изменения, обеспечивающие более функциональное использование в работе.
После изменения в программе работает регулятор следующим образом:
-
При нажатии кнопки «Start/Stop» — SB1 двигатель медленно набирает обороты до ранее заданной или максимальной скорости, зависит от предварительной настройки.
-
Остановить вращения двигателя возможно повторным нажатиям на кнопку Start/Stop. После этого скорость плавно снижается до полной остановки. Скорость увеличения/уменьшения отображаются на светодиодном индикаторе.
-
В режиме «Стоп» нажатием на кнопку «Реверс» — SB2 включится реле, обмотки двигателя поменяют полярность подключения, вращения будет, производится в противоположном направлении.
 Индикация состояния переключения реверса отображается светодиодами VD2,VD3. Запустить/остановить двигатель нужно нажать кнопку «Start/Stop» алгоритм работы, как выше описано в пункте 1 – 2.
Индикация состояния переключения реверса отображается светодиодами VD2,VD3. Запустить/остановить двигатель нужно нажать кнопку «Start/Stop» алгоритм работы, как выше описано в пункте 1 – 2. -
Если нужно изменить направления вращения во время работы двигателя необходимо нажать на кнопку «Реверс». Скорость мелено будет уменьшаться до полной остановки и только после этого сработает реле, обмотка двигателя поменяют полярность подключения. Функция «Реверс» не работает, если двигатель находится в режиме плавного разгона или остановки.
-
Необходимую Вам скорость двигателя, возможно, изменить при помощи энкодера. Если регулятор находится в режиме «Стоп» ручкой энкодера возможно увеличивать скорость, при этом двигатель будет вращаться по мере увеличении/уменьшении настройки в тоже время это будет отображаться на светодиодном индикаторе. Так можно оптимально подобрать скорость двигателя необходимую для Вашей работы. Чтобы сохранить данные скорости двигателя нужно нажать на кнопку энкодера. Ети параметры хранится в памяти микроконтроллера до следующего внесенного Вами изменения не зависимо от того будет ли отключен регулятор от источника питания или нет.
Переключения направления вращения вала двигателя, возможно, коммутировать с помощью Н — моста на транзисторах или реле. Оба варианта имеют свои плюсы и минусы, все же было принято решения применить реле как более дешевый вариант и проще в управлении.
Радиодетали имеющееся на то время у меня в наличии определили конструктив всего устройства. Особо каких-то требований применяемых элементам нет, большинство их меняются на аналогичные не ниже по параметрам, чем применены в устройстве.
Правильно собранная конструкция с установленными исправными радиодеталями и прошитым микроконтроллером в настройке не нуждается. Радиолюбителям имеющий небольшой опыт сборки подобных устройств предлагаю придерживаться следующего порядка работы:
1. Проверить целостность дорожек и замыканий между ними.
2. Установить микросхему DA1, С3,С4,С5, подпаять соединяющие провода разъем XS1.
Подать от стабилизированного источника питания (ИП) 9…12В. На выходе стабилизатора должно быть напряжения 5В.
3. Следующий этап установить панельку под микроконтроллер DD1
Омметром проверить отсутствие замыканий между выводами. Подключить ИП, проверить наличие напряжения 5В на выводе 14 относительно вывода 5.
4. Если проверено и работает все нормально, установить тактовые кнопки SB1,SB2 резисторы R1,R2 не забывая при этом тестером проверить исправность кнопок и номиналы резисторов.
Подать напряжения на плату, проверить вольтметром на выводах панельки 3 и 15 наличие 5В. При нажатии кнопки, на проверяемом выводе, должен быть 0В.
5. Установить энкодер BQ1, резисторы R4, R5,R7 конденсаторы С1,С2.
Для проверки этого участка схемы понадобится ИП, который нужно подключить разъему XS1. При нажатии кнопки энкодер на выводе 4 панельки микроконтроллера напряжения будет 0В при отпускании 5В. Работу энкодер возможно проверить вольтметром подключенном к выводам 2 и 3 панельки, при вращении ручки показатели на шкале вольтметра должны меняться. Лучший вариант проверки осциллографом.
6. Светодиодный индикатор HL1, резисторы R3,R6, R10-R16, транзисторы VT1,VT2 установить на плату.
Соединить между собой выводы 14 – 17 – 18 панельки микросхемы.
Перемычку подключить выводу 5, свободным концом по очереди подключать выводы 6 – 8, 10 -13 при этом должны засвечиваться только тот сегменты индикатора вывод который должен быть подключен.
7. Произвести монтаж управления реле и индикаторов направления “Реверс” – R8,R9,R19,R20,R21, VD1,VD2,VD3, VT3,VT5.
Проверить этот узел возможно следующим способом, замыкая выводы 16 по очереди с 5 и 14 должно включатся реле, поменяться индикация на светодиодах VD2,VD3. Диод VD1 по возможности установить на выводах реле.
Диод VD1 по возможности установить на выводах реле.
8.Установить на плату драйвер ШИМ — VT4,R17,R18.
Чтобы проверить работу как работает ШИМ до подключение двигателя разъему XS3.1 через резистор 1..10к подключить ИП. В панельку установить заранее за программированный микроконтроллер.
Осциллографом проконтролировать, как меняется скважность. При отсутствии осциллографа последовательно резистору 1k подключить светодиод при нажатии кнопки “Старт” или вращением энкодер свечения светодиода будет меняться.
Плата
Схема
VT1,VT2, VT5 КТ315, VT3,VT4 IRFZ44
Плата, прошивка скачать……..
Радиоблок — YouTube
Похожие темы: Паяльная станция — Atmega328 Регулятор скорости двигателя постоянного тока
При использовании материалов сайта, обязательна ссылка на сайт http://vinratel.at.ua
РЕГУЛЯТОР НАПРЯЖЕНИЯ ДЛЯ ГАЛОГЕНОВЫХ ЛАМП С ПАМЯТЬЮ
РЕГУЛЯТОР НАПРЯЖЕНИЯ ДЛЯ ГАЛОГЕНОВЫХ ЛАМП С ПАМЯТЬЮ.
Абрамов Сергей г. Оренбург
Достаточно
частый выход
из строя
дорогих галогеновых
ламп
натолкнул
автора на
разработку
данной
конструкции.
Нити накала галогеновых
ламп да в
прочем и
обычных тоже,
в холодном
состоянии
имеют низкое
омическое
сопротивление. При
подаче
полного
сетевого
напряжения
на ещё не
разогретую
нить накала
приводит к
резкому
увеличению
тока, в
следствии
чего спираль
и отгорает.
Выходом из
данной
ситуации
является подключать
лампы через
специальное
устройство
позволяющее
плавно
увеличивать
напряжение (ток)
через нить
накаливания
в течении 3-10
секунд. Автор
для этих
целей
использовал
в своей
конструкции
достаточно
дешёвый
микроконтроллер
PIC12F629.
При
небольшой
программной
доработке
можно
использовать
и однократно
программируемые
контроллеры
типа PIC12CE518, 519
которые
имеют более
низкую цену.
Автор
для этих
целей
использовал
в своей
конструкции
достаточно
дешёвый
микроконтроллер
PIC12F629.
При
небольшой
программной
доработке
можно
использовать
и однократно
программируемые
контроллеры
типа PIC12CE518, 519
которые
имеют более
низкую цену.
Можно было бы использовать для данной конструкции и обычную схему на дискретных элементах, но тогда пришлось бы применить для задания яркости переменный резистор что не всегда удобно или значительно усложнить схему. В данной конструкции используются две кнопки плюс и минус, при небольшой доработке программы можно оставить одну и регулировать яркость по кругу.
Работает
схема
следующим
образом Рис1.
При подаче
питания на
разъём Х1
сетевое напряжение
ограничивается
и выпрямляется
элементами R1,C1,VD1,VD2,VD3 на
уровне 5,1
вольт и
фильтруется
конденсаторами
С2,С3. От этого
напряжения запитывается
микроконтроллер и
выходной
ключ VT1.
После
инициализации
регистров
контроллера
микропрограмма
опрашивает
состояние
кнопок SB1,SB2.
На резисторе R3 и
входных
цепях
приёмного
буфера GP4
микросхемы D1
организована
система
прерывания
при переходе
сетевого
напряжения
через 0.
Вследствие
чего
загружается
предварительно
записанными
данными из флеш
памяти и
запускается
таймер TMR0
микроконтроллера.
После
окончания
счёта таймера
TMR0
наступает
прерывание,
позволяющее
выдать в порт
GP5 импульс
длительностью
15мкс. Импульс
откроет ключ
на
транзисторе VT1, а тот в
свою очередь симистор VS1.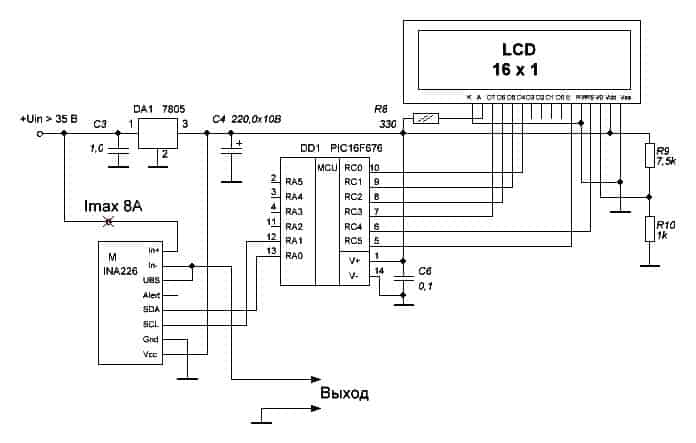 После
включения
устройства
угол открытия симистора
будет плавно
изменяться
от состояния
полностью
закрытого до
состояния
которое будет
считано из флеш
памяти в
течение 3-10
секунд. Таким
образом мы увидим
плавное
нарастание
напряжения.
Изменить
максимальное
напряжение
до которого
будет
открываться симистор
можно при
помощи
кнопок SB1,SB2 в
ту или другую
сторону, это
будет видно
наглядно по
яркости
свечения
лампы HL1.При
этом данные
будут
записаны в
память контроллера,
и при
следующем
включении
яркость
будет
нарастать
именно до
этого
значения.
Варистор R2 служит
для
подавления
всплесков
напряжения
выше нормы и
таким
образом
защищает симистор.
После
включения
устройства
угол открытия симистора
будет плавно
изменяться
от состояния
полностью
закрытого до
состояния
которое будет
считано из флеш
памяти в
течение 3-10
секунд. Таким
образом мы увидим
плавное
нарастание
напряжения.
Изменить
максимальное
напряжение
до которого
будет
открываться симистор
можно при
помощи
кнопок SB1,SB2 в
ту или другую
сторону, это
будет видно
наглядно по
яркости
свечения
лампы HL1.При
этом данные
будут
записаны в
память контроллера,
и при
следующем
включении
яркость
будет
нарастать
именно до
этого
значения.
Варистор R2 служит
для
подавления
всплесков
напряжения
выше нормы и
таким
образом
защищает симистор.
В
качестве VS1 в схеме
применён
маломощный симистор
с
максимальным
током 4ампера
и током открывания
по
управляющему
входу10-40ма. Некоторые
экземпляры
данного
семейства могут
работать без
ключевого
транзистора,
напрямую с
выхода GP5 через токоограничительный
резистор 180-220Ом.
Вместо
указанного
на схеме подойдёт
любой с
напряжением
пробоя 400-600
вольт и любой
буквой.(напряжение
пробоя указывается
после тире в
маркировке симистора).
Вместо VT1
подойдет
любой
транзистор
соответствующей
структуры, с
током через
коллектор
50-100ма и
напряжением
эмиттер-
коллектор 10-15
вольт. Вместо
VD1, VD2
любые на
напряжение 50-300
вольт и ток
50-100ма. С1 типа К73-17
на напряжение
выше 250 вольт. С2
типа К50-6 или
ему подобный.
С3
керамический,
для
поверхностного
монтажа.
Печатная
плата Рис2. размером
27х30мм. выполнена
из
одностороннего
стеклотекстолита
толщиной 1,5мм
и рассчитана
на
применение
микроконтроллера
в корпусе SOIC.
размером
27х30мм. выполнена
из
одностороннего
стеклотекстолита
толщиной 1,5мм
и рассчитана
на
применение
микроконтроллера
в корпусе SOIC.
Коды программы в HEX формате приведены в Таблице 1.
Рис1.
Рис2.
Табл1.
:020000040000FA
:020000002F28A7
:080008000528A900030EAA005F
:100010000B1819280B1911282A0E8300A90E290E76
:1000200009000B118B1E0C288B1285168920851256
:100030000C2805080B10051E2028201C23282E281C
:10004000201825282E2820142628201087208720D5
:100050000B118B12210881008B16A0140C2883121F
:10006000640085010730990083161630850004303E
:1000700081000630950010309600990183120830F7
:100080008B00A0145F30840080018403A0184428F2
:10009000FF30A6004630A500FF30A7001430A800AE
:1000A0000A30A10081000030A020A2008B1764005C
:1000B000A60B6428A50B6428FF30A6004630A500D7
:1000C000851C7820051D8220A70B7728A80B772890
:1000D000FF30A7001430A800A01C772821082202B6
:1000E00003197728031C7628A10A7728A10357282B
:1000F000FF302202031DA20A2208A4000030A30040
:100100008E2008000A302202031DA2037C28AA3098
:100110008A280530AB00AB0B8B2808008B13230813
:1001200083169B008312240883169A001C155530F1
:100130009D00AA309D009C141C1183128B1708008F
:0C01400083169B001C141A088312080090
:02400E00C43FAD
:00000001FF
Автоматический блок управления стеклоочистителем.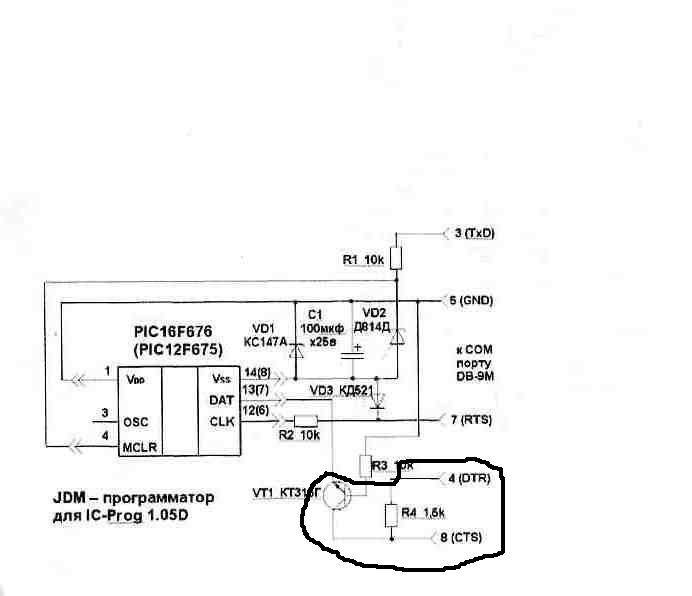 |
Л. Елизаров. | 8 | 43 | 2011 |
| Автоматический включатель-выключатель противотуманных фар. | А. Долгодров. | 5 | 43 | 2011 |
| Автоматическое зарядное устройство на базе блока питания ПК. | Н. Казаков. | 2 | 49 | 2007 |
| Автоматическое управление отопителем (возвращаясь к напечатанному). | С. Кашутин. | 8 | 44 | 2011 |
| Автоматическое управление отопителем. | С. Кашутин. | 9 | 43 | 2010 |
| Автоматическое управление отопителем. | С. Кашутин. | 10 | 43 | 2010 |
| Автоматическое устройство для зарядки свинцово-кислотных аккумуляторных батарей. | В. Костицын. | 3 | 42 | 2008 |
| Автомат—коммутатор фар ближнего света. | В. Югрин. | 8 | 52 | 2005 |
| Автомат—переключатель полярности напряжения для зарядного устройства. | С. Клемёнов. | 3 | 44 | 2010 |
| Автомобильный GSM-сигнализатор с определением координат. | В. Ващенко. | 8 | 28 | 2009 |
| Автомобильный GSM-сигнализатор с определением координат. | В. Ващенко. | 9 | 41 | 2009 |
| Автомобильный кодовый замок-блокиратором. | А. Бойцов. | 12 | 43 | 2007 |
| Автомобильный сигнализатор на PIC16F84. | В. Суров. | 6 | 47 | 2007 |
| Автомобильный светильник. | К. Мороз. | 5 | 49 | 2008 |
| Автомобильный сигнализатор. | Э. Щенов. | 2 | 43 | 2009 |
| Автомобильный стробоскоп. | Н. Хлюпин. | 12 | 47 | 2008 |
Адаптивное устройство управления стеклоочистителем. |
Э. Щенов. | 12 | 33 | 2010 |
| Активный «светоотражатель» для велосипеда. | А. Рябый. | 10 | 37 | 2008 |
| Блок зажигания — регулятор угла ОЗ на микроконтроллере PIC16F676. | В. Шкильменский. | 11 | 36 | 2008 |
| Блокиратор ШИ-регулятора мощности электродвигателей. | Н. Токмаков, В. Грудинин. | 2 | 41 | 2009 |
| Блок зажигания — регулятор угла ОЗ на микроконтроллере PIC16F676. | В. Шкильменский. | 4 | 46 | 2009 |
| Блок зажигания на микроконтроллере для ВАЗ-2108, ВАЗ-2109. | Б. Мухин. | 12 | 36 | 2009 |
| Блок зажигания с индукционным датчиком | Заботин В., Рейнбот А. | 7 | 42 | 1972 |
| Блок зажигания с индукционным датчиком | Кокорев Ю., Долин Е. | 6 | 34 | 1973 |
| Блокиратор электрической цепи автомобиля. | А. Кузема. | 1 | 44 | 2011 |
| Выпрямитель—стабилизатор для мотоцикла «YAMAHA XV 400». | В. Перолайнен, Ю. Прусаков. | 5 | 48 | 2008 |
| Высокоскоростной автомобильный стробоскоп. | Н. Кукса, Г. Птах. | 7 | 50 | 2005 |
| Два индикатора искры. | П. Беляцкий. | 11 | 53 | 2006 |
| Два полезных приспособления. | А. Иванов. | 11 | 43 | 2009 |
| Диагностические переходники для автомобилей с системой впрыска топлива. | М. Попов. | 7 | 40 | 2009 |
| Диагностические переходники для автомобилей с системой впрыска топлива. | М. Попов. | 8 | 30 | 2009 |
Доводчик стекол автомобиля. |
В. Суров. | 4 | 38 | 2008 |
| Доработка трубки бесшнурового телефона. | А. Кашкаров. | 12 | 45 | 2007 |
| Зарядное устройство на базе регулятора мощности PR1500i. | C. Муралев. | 3 | 40 | 2009 |
| Зарядное устройство с цифровым ампервольтметром. | Н. Хлюпин. | 7 | 40 | 2008 |
| Зарядное устройство с цифровым ампервольтметром. | Н. Хлюпин. | 8 | 38 | 2008 |
| Зарядное устройство с ШИ регулированием тока. | Ю. Цыпылов. | 5 | 44 | 2011 |
| Звуковой сигнализатор указателя поворотов на мотоцикле. | Ф. Касаткин. | 2 | 50 | 2007 |
| Измеритель ёмкости стартерных аккумуляторных батарей. | К. Мороз. | 11 | 48 | 2005 |
| Измеритель толщины лакокрасочных покрытий. | Ю. Пушкарев. | 1 | 46 | 2006 |
| Индикатор включенной передачи. | С. Гуляев. | 6 | 41 | 2010 |
| Индикатор зарядки/разрядки батареи аккумуляторов. | В. Гусев. | 4 | 44 | 2006 |
| Индикаторы напряжения бортовой сети. | В. Гусев. | 3 | 51 | 2007 |
| Испытатель автомобильных аккумуляторных батарей (За рубежом). | 6 | 49 | 2007 | |
| Компьютерный блок питания — зарядное устройство. | М. Шумилов. | 1 | 38 | 2009 |
| Контроль исправности световых приборов. | М. Хаматдинов. | 11 | 49 | 2005 |
| Контроль исправности сигнализатора уровня тормозной жидкости. | М. Хаматдинов. | 4 | 45 | 2006 |
Корректор показаний цифровых спидометра и одометра. |
С. Товкач. | 4 | 40 | 2010 |
| Микроконтроллерная система зажигания без прерывателя-распределителя. | С. Полозов. | 1 | 42 | 2011 |
| Микроконтроллерная система зажигания без прерывателя-распределителя. | С. Полозов. | 2 | 42 | 2011 |
| Модернизированный бортовой компьютер. | А. Алехин. | 12 | 46 | 2005 |
| Модернизированный бортовой компьютер. | А. Алехин. | 1 | 47 | 2006 |
| Модернизированный бортовой компьютер. | А. Алехин. | 2 | 31 | 2006 |
| Мощный гаражный источник. | К. Мороз. | 9 | 39 | 2011 |
| Независимое питание автомобильных часов. | Э. Щенов. | 7 | 47 | 2011 |
| Освещение салона сверхъяркими светодиодами. | В. Горбатых. | 10 | 43 | 2009 |
| Основы вентиляции корпусов радиоаппаратуры и ПК. | 11 | 38 | 2008 | |
| Охранный сигнализатор с использованием канала GSM. | С. Полозов. | 3 | 40 | 2010 |
| Переносный охранный сигнализатор. | А. Струков. | 3 | 41 | 2008 |
| Прибор для контроля уровня воды (За рубежом) | — | 7 | 58 | 1972 |
| Прибор для прослушивания шумов механизмов автомобиля. | В. Нефедов. | 7 | 43 | 2010 |
| Прибор контроля давления. | А. Кожевников. | 4 | 42 | 2011 |
| Пробник автомобилиста. | С. Горенко. | 8 | 48 | 2006 |
| Пробник регулятора холостого хода. | А. Ольшанский. | 3 | 40 | 2011 |
Простой маршрутный компьютер. |
В. Киба. | 11 | 41 | 2009 |
| Противоугонное устройство. | В. Степанов. | 7 | 39 | 2008 |
| Пусковое устройство. | В. Жданов. | 9 | 47 | 2006 |
| Пускозарядное устройство с синхронным выпрямителем. | В. Калашник, В. Черников. | 1 | 39 | 2010 |
| Регулируемый стабилизатор зарядного тока. | В. Климов. | 2 | 38 | 2008 |
| Регулятор угла ОЗ на PIC16F84. | А. Долганов. | 3 | 43 | 2006 |
| Реле указателя поворотов для мотоцикла | Шуклин В. | 8 | 29 | 1972 |
| Речевой информатор на базе телефонного автоответчика. | В. Богушевич. | 1 | 35 | 2007 |
| Сигнализатор «Не закрыта дверь». | Е. Флейшер. | 4 | 40 | 2008 |
| Сигнализатор превышения заданной скорости. | В. Суров. | 6 | 47 | 2011 |
| Сигнализатор прибытия автомобиля. | В. Нефедов. | 5 | 39 | 2009 |
| Сигнализатор прогрева двигателя — эконометр топлива. | В. Суров. | 6 | 42 | 2010 |
| Стеклоочиститель-автомат (За рубежом) | — | 11 | 60 | 1970 |
| Стенд для измерения пропускной способности жиклеров карбюраторов. | Н. Осипов. | 5 | 42 | 2010 |
| Стетоскоп для двигателей (За рубежом) | — | 5 | 62 | 1970 |
| Сторож—сигнализатор «Не закрыта дверь». | С. Шишкин. | 12 | 39 | 2011 |
| Стробоскоп-тахометр с фонарем на светодиодах. | А. Кадетов. | 8 | 47 | 2006 |
Таймер обогревателя зеркал заднего вида. |
В. Суров. | 2 | 46 | 2011 |
| Тахоиндикатор. | Д. Григорьев. | 6 | 39 | 2008 |
| Тахометр для FORD SIERRA. | В. Демиденко. | 3 | 52 | 2007 |
| Тахометр для автомашины (За рубежом) | — | 9 | 59 | 1972 |
| Транзисторное зажигание в автомобиле (За рубежом) | — | 8 | 59 | 1972 |
| Узел пусковой задержки искрообразования. | Ф. Касаткин. | 4 | 53 | 2007 |
| Универсальный автомат-прогреватель двигателя автомобиля. | В. Суров. | 10 | 49 | 2007 |
| Управление электрозамками дверей автомобиля. | С. Байков. | 10 | 41 | 2009 |
| Усовершенствование реле указателей поворота | Юнацкий А. | 2 | 31 | 1973 |
| Устройство для зарядки автомобильных аккумуляторных батарей. | А. Дымов. | 8 | 42 | 2010 |
| Устройство управления прогреванием двигателя. | А. Натненков. | 7 | 38 | 2007 |
| Что показывает амперметр? | А. Лавренов. | 12 | 45 | 2005 |
| Чтобы водитель не спал за рулем (За рубежом) | — | 11 | 60 | 1971 |
| ШИ регулятор мощности электродвигателей. | Н. Токмаков. | 3 | 39 | 2008 |
| Электроника в автомобиле (По материалам зарубежной печати) | Синельников А. | 6 | 57 | 1970 |
| Электронные реле указателя поворотов для мотоцикла с генератором переменного тока | Якушев В. | 6 | 23 | 1973 |
| Электронные реле указателя поворотов звуковой индикатор на двух транзисторах | Папков А. |
6 | 24 | 1973 |
| Электронные реле указателя поворотов звуковой индикатор на одном транзисторе | Соляник Б. | 6 | 24 | 1973 |
| Электронные реле указателя поворотов на одном полевом транзисторе | Ерофеев М. | 6 | 22 | 1973 |
| Электронные реле указателя поворотов с частично разгруженными контактами | Урюков В. | 6 | 22 | 1973 |
| Электронные реле указателя поворотов универсальное бесконтактное | Иноземцев В., Пантелеев А. | 6 | 23 | 1973 |
| Электронный блок зажигания для автомобилей и мотоциклов | Доильницын И., Орлов П. | 3 | 24 | 1973 |
| Электронный помощник «молодого» водителя (За рубежом) | — | 11 | 60 | 1973 |
| Электронный сторож | Махов В. | 7 | 46 | 1972 |
PIC16F676 Распиновка, контакты GPIO, программирование, техническое описание, приложения
PIC16F676 — это малогабаритный микроконтроллер pic , который является одним из лучших вариантов для встраиваемых приложений. Для большинства промышленных и бытовых приборов требуется небольшое количество контактов и небольшой объем памяти, который может быть выполнен с помощью PIC16F676. Он надежен для студенческих проектов благодаря своей высокой производительности, которая улучшается благодаря технологии на основе флэш-памяти. PIC16F676 может быть меньше по размеру, но он имеет внутренний 10-битный аналого-цифровой преобразователь в 14-выводном корпусе.Микроконтроллер PIC также поставляется в нескольких корпусах, каждый из которых состоит из 14 контактов. Внутренняя флэш-память микроконтроллера составляет 2 КБ, что отлично подходит для небольших проектов и особенно для разработки небольших программ.
Схема расположения выводов PIC16F676
Распиновка приведена здесь. Этот микроконтроллер имеет два порта GPIO, PORTA и PORTC. Оба эти контакта GPIO имеют несколько функций. Мы подробно рассмотрим каждый вывод GPIO позже в этом разделе.
PIC16F676 Конфигурация контактов GPIO
Здесь перечислены функции и подробная информация обо всех выводах GPIO.
Штыри POWER
PIC16F676 имеет только два входа питания . Один используется для подачи питания, а второй используется для создания общего заземления.
- V DD — штифт1
- V SS — штифт 14
CRYSTAL / ЧАСЫ
Для использования внешних часов или генератора с PIC16F676 есть два контакта: один для входа, а второй — для выхода.
- OSC1 / CLKIN — контакт 2
- OSC2 — контакт 3
КОНТАКТЫ ЦИФРОВОГО ВЫХОДА
В этой PIC есть два порта ввода-вывода общего назначения A и C, которые действуют как выходные. Оба порта выдают выходной сигнал в виде TTL. Выход на этих выводах не будет больше V DD. Эти простые цифровые выходы могут использоваться только через программу, но нам нужно будет указать порт для доступа к контакту этого порта. Цифровые выходные контакты в PIC16F676:
- RA0 — GPIO3
- RA1 — GPIO12
- RA2 — GPIO11
- RA4 — GPIO3
- RA5 — GPIO2
- RC0 — GPIO10
- RC1 — GPIO9
- RC2 — GPIO8
- RC3 — GPIO7
- RC4 — GPIO6
- RC5 — GPIO5
ВХОДНЫЕ КОНТАКТЫ GPIO
В PIC16F676 каждый вывод обоих портов A и C может использоваться как входные выводы.Эти контакты основаны на TTL и требуют программирования. Эти контакты имеют программируемые входные подтягивающие резисторы. Напряжение на этих выводах не должно быть больше, чем V DD . Все входные контакты:
Напряжение на этих выводах не должно быть больше, чем V DD . Все входные контакты:
- RA0 — GPIO3
- RA1 — GPIO12
- RA2 — GPIO11
- RA4 — GPIO3
- RA5 — GPIO2
- RC0 — GPIO10
- RC1 — GPIO9
- RC2 — GPIO8
- RC3 — GPIO7
- RC4 — GPIO6
- RC5 — GPIO5
ПЕРЕКЛЮЧАТЕЛЬ ПИН
Контакты прерывания работают как входные контакты, их основная цель — привлечь внимание контроллера, игнорируя все другие функции.В программе должно быть описано, что контроллер должен делать в случае прерывания. В PIC16F676 только один вывод прерывания подключен к программному счетчику и требует активации схемного триггера (ST).
ШТИФТЫ КОМПАРАТОРА
PIC16F676 также имеет компаратор , используемый для сравнения аналоговых входов. Единственный компаратор использует три контакта, два для входа и один для выхода. Оба входа TTL и ST могут использоваться на этих контактах, но выход всегда будет зависеть от входа.Контакты компаратора в PIC16F676:
- COUT — GPIO11 (выход)
- CIN — GPIO12 (вход 1)
- CIN — GPIO13 (вход 2)
ШТИФТЫ ТАЙМЕРА
В PIC16F676 есть , два внутренних таймера , и один из таймеров имеет вентиль таймера, который в основном используется для управления состоянием питания таймера 1. Контакты таймера PIC16F676:
- T0CKI — GPIO11
- T1CKI –GPIO2
- T1G ’- GPIO3
ШТИФТЫ ПОСЛЕДОВАТЕЛЬНОГО ИНТЕРФЕЙСА
В этом микроконтроллере также есть вывод последовательной связи, но последовательная связь этих выводов будет синхронной и в основном будет использоваться для программирования.Будут использоваться три контакта: один для передачи данных, второй для тактового импульса и третий для напряжения. Пины:
- ICSPCLK — GPIO12
- ICSPDAT — GPIO13
- В PP — GPIO4
КОНТАКТЫ АНАЛОГОВОГО ВХОДА
PIC 16F676 позволяет внутренним каналам АЦП преобразовывать аналоговый сигнал в цифровой.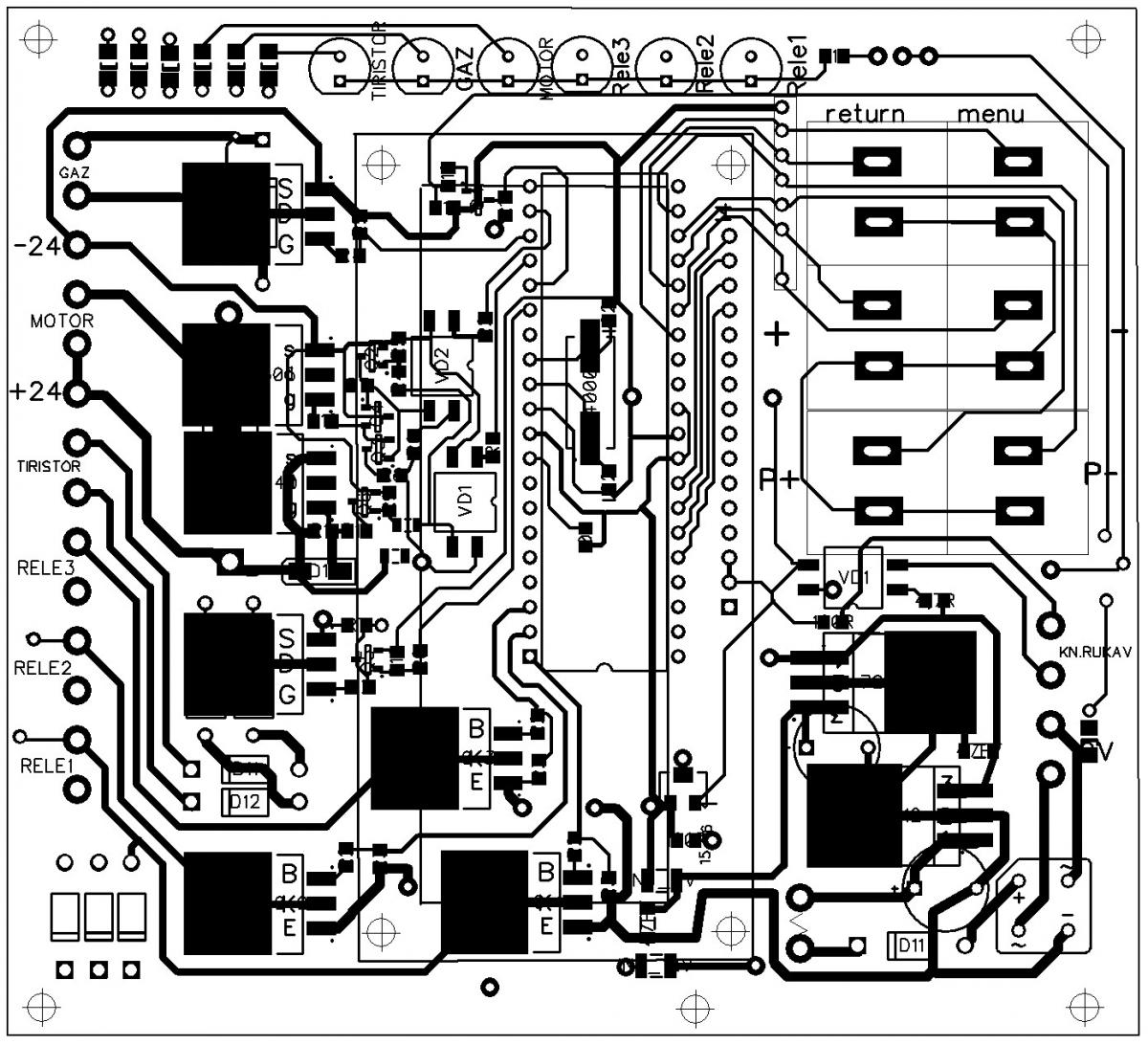 Для преобразования аналогового сигнала в PIC16F676 всего 8 каналов, которые можно использовать для преобразования в цифровые значения, 10-битный регистр используется для хранения преобразованного значения.Опорного напряжения вывод используется, чтобы выбрать максимальное напряжение между V DD и V исх. Вот все аналоговые и контрольные выводы:
Для преобразования аналогового сигнала в PIC16F676 всего 8 каналов, которые можно использовать для преобразования в цифровые значения, 10-битный регистр используется для хранения преобразованного значения.Опорного напряжения вывод используется, чтобы выбрать максимальное напряжение между V DD и V исх. Вот все аналоговые и контрольные выводы:
- AN0 — GPIO13
- AN1 — GPIO12
- AN2 — GPIO11
- AN3 — GPIO3
- AN4 — GPIO10
- AN5 — GPIO9
- AN6 — GPIO8
- AN7 — GPIO7
- В исх. — GPIO12
ПИН СБРОСА
PIC имеет только один внешний вывод сброса, которым можно управлять цифровым способом или с помощью внешней кнопки.Вывод сброса является активным выводом низкого уровня и работает по базовой логике ST.
Если вы хотите начать с программирования микроконтроллеров pic на языке c или ассемблере, вы можете проверить это полное руководство:
СТРОИТЕЛЬНАЯ СХЕМА PIC16F676
Внутренняя блок-схема PIC16F676 показана ниже
ХАРАКТЕРИСТИКИ
Эти функции перечислены в соответствии с таблицей .
- Он дает 12 контактов ввода / вывода GPIO в одном небольшом корпусе, который можно использовать для прямого управления светодиодами или другими низковольтными устройствами.
- PIC 16F676 имеет внутренние часы , которые можно использовать при инициализации через программу.
- Автоматический переход в спящий режим позволяет PIC экономить больше энергии.
- Как только код будет запрограммирован внутри, он будет защищен от кражи.
- PIC имеет 8 аналоговых каналов цифрового преобразователя , которые могут хранить 8-битные данные.
- Имеет два внутренних таймера (Timer0 и Timer1). Входом таймера 1 можно управлять с внешнего контакта.

- PIC16F676 имеет контакты для последовательного программирования, которые можно использовать для программирования через два контакта.
- IT имеет аналоговый компаратор, который можно использовать несколько двух входов, и к их выходу можно получить доступ извне.
PIC16F676
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ- Он имеет ток в режиме ожидания 1 нА при 2 В и рабочий ток 100 мкА при 2 В, но рабочее напряжение зависит от генератора.
- Внутренний генератор PIC составляет 4 МГц.
- Диапазон рабочего напряжения PIC16F676 — 2.От 0 до 5,5 В.
- PIC16F676 имеет флэш-память на 1024 слова, 64 байта SRAM и 128 байтов EEPROM.
- Имеется 8 аналого-цифровых каналов, но все они используют один 10-битный регистр для хранения преобразованных данных.
- PIC имеет диапазон рабочих температур от -40 до 125 градусов и диапазон температур хранения от -65 до 150 градусов.
- Максимальная частота процессора микроконтроллера составляет 1 МГц.
- Максимальное напряжение на всех выводах не должно быть больше, чем на выводе питания, а ток не должен превышать 250 мА.
ПАМЯТЬ ПРОГРАММЫ И СТЕК
PIC16F676 ПРИЛОЖЕНИЯ
- Используется в основном в приложениях для начинающих, таких как студенческие проекты, программы развития и т. Д.
- Небольшие проекты, такие как дисплей с прокруткой, счетчики или небольшой ЖК-дисплей, также используют PIC16F676.
- Те устройства, которые требуют аналого-цифрового преобразования по времени или другим событиям, используют PIC16F676 из-за 8 входных каналов.
Альтернативные варианты микроконтроллеров pic: PIC16F877A, PIC16F84A, PIC18F46K22
PIC16F676 Программирование периферийных устройств
Как упоминалось ранее, как и другие микроконтроллеры pic, он предлагает встроенный АЦП, таймеры и функции последовательного программирования. Мы объясняем регистры этих периферийных устройств в этом разделе.
Мы объясняем регистры этих периферийных устройств в этом разделе.
ТАЙМЕРНЫЙ РЕГИСТР
PIC16F676 имеет два регистра внутренних таймеров , значениями которых можно управлять или проверять в соответствии с требованиями. В этом контроллере timer0 является 8-битным и имеет другой регистр по сравнению с timer1:
time1 — это 16-битный таймер , обладающий различными функциями, а также управляющий вывод, известный как вентиль:
АНАЛОГ НА ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ
При аналого-цифровом преобразовании данные и преобразование контролируются тремя регистрами.
- ANCON0 — Регистр аналого-цифрового преобразования
- ANCON1 — Регистр аналого-цифрового преобразования 1
- ANSEL — Регистр выбора аналогового сигнала
Эти три регистра будут преобразовывать аналоговые данные в цифровые с разным статусом.
ACON0 будет использоваться для выбора данных, канала и ссылки аналогового регистра.
ANCON1 будет использоваться для выбора бита тактовой частоты преобразования из аналогового в цифровой.Третий бит — это бит выбора, который используется, потому что аналоговые выводы — это не только аналоговые выводы, они также могут использоваться для других функций. Этот регистр поможет контроллеру использовать эти контакты в качестве аналоговых или цифровых контактов.
PIC16F676 ИНСТРУКЦИИ НАБОР АРХИТЕКТУРА
В PIC16F676 используется 14-битный набор команд. Набор команд делится на три части.
Байт-ориентированная операция
В байтовой ориентации 14-битный набор команд разделен на три части.
- OPCODE — 7 бит
- Назначение — 1 бит
- Файловый регистр — 6 бит
Бит-ориентированная операция
В Bit-Oriented набор команд также будет разделен на три части, но в нем будет разное количество бит для разных операций:
-
- OPCODE — 7 бит
- Назначение — 2 бита
- Файловый регистр — 4 бита
Буквальные и управляющие операции
В режиме Literal и Control данные будут разделены на две части.
-
- Для вызова и перехода к инструкциям
- OPCODE — 8 бит
- Литерал — 6 бит
- Для вызова и перехода к инструкциям
- Прочие инструкции
- OPCODE — 11 бит
- Литерал — 3 бита
Есть некоторое представление для назначения, литерала и бит файла. Вот таблица для каждого доступного значения:
Существует также некоторое представление для OPCODE:
PIC может быть легко запрограммирован на , используя данную инструкцию и многое другое из таблицы .Эта версия ПОС также может быть запрограммирована разными способами. PIC16F676 надежен только тогда, когда он должен выполнять некоторые функции управления. Он не сможет выполнять интеллектуальные операции из-за своей ограниченной конструкции, но это лучший вариант для использования в качестве микроконтроллера.
Загрузить техническое описание PIC16F676
Введение в PIC16F676 — Инженерные проекты
Привет, друзья! Надеюсь у тебя все хорошо. Сегодня я подробно расскажу о Introduction to PIC16F676. Это 8-битный микроконтроллер CMOS PIC, основанный на Flash и разработанный Microchip.Он поставляется с 14-контактным интерфейсом с высокопроизводительным процессором RISC, что делает его идеальным выбором для большинства электронных приложений, которые широко связаны со встроенными системами или промышленной автоматизацией. Этот крошечный чип включает в себя все необходимое для разработки индивидуальных студенческих проектов. Объем памяти и количество контактов немного меньше по сравнению с другими контроллерами в сообществе PIC, однако технология на основе флэш-памяти делает это устройство совместимым с внешними устройствами. В этом посте мы обсудим все, что связано с PIC16F676, его распиновка и описание, основные функции, блок-схема, расположение памяти и приложения.Давайте погрузимся в суть дела и исследуем все, что вам нужно знать.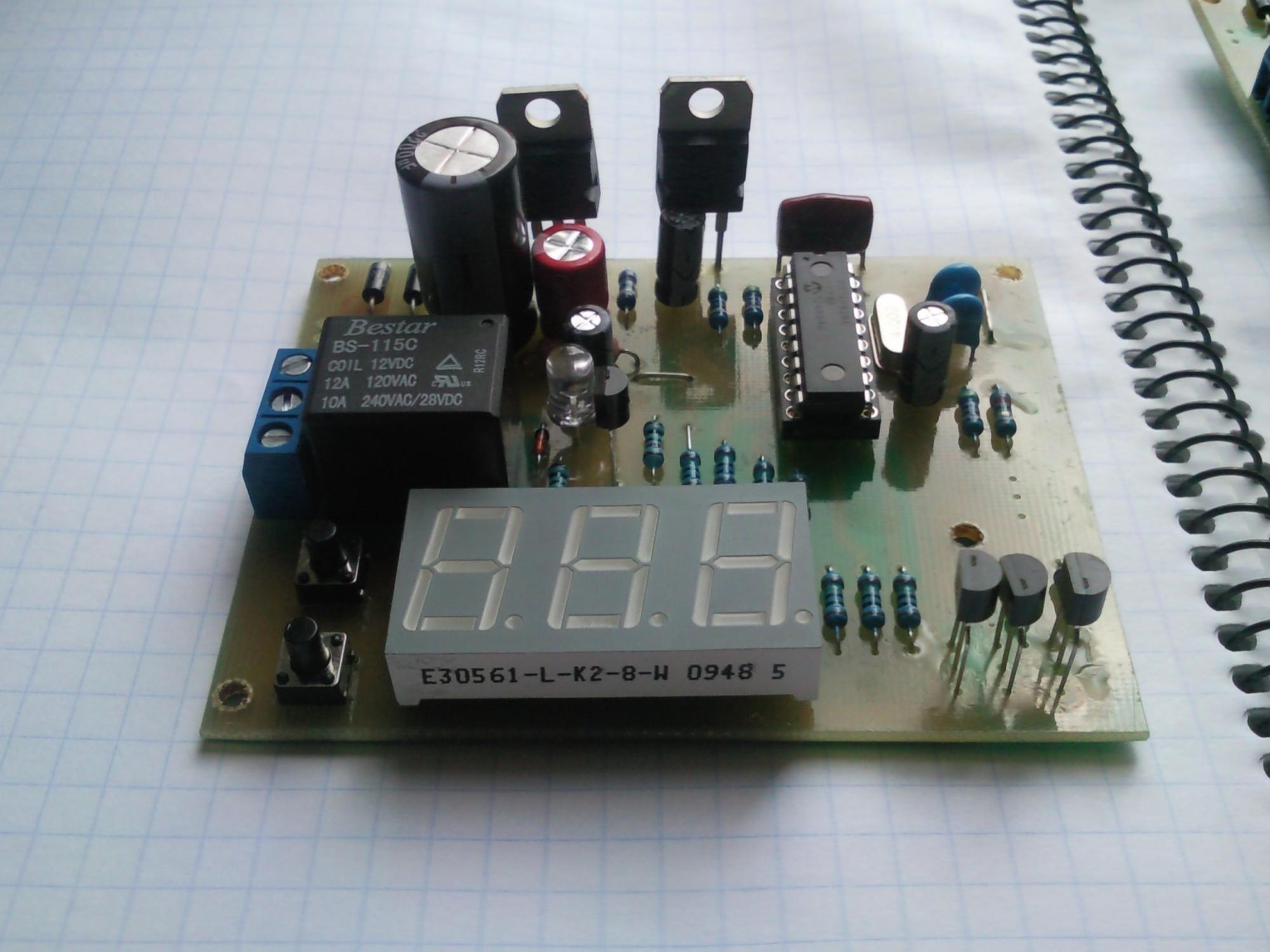
Введение в PIC16F676
- PIC16F676 — это 8-разрядный микроконтроллер PIC с 14-контактной схемой расположения. Он основан на флэш-памяти, где высокопроизводительный процессор увеличивает скорость обработки.
- Поставляется в трех пакетах: PDIP, SOIC и TSSOP. Все три версии доступны в 14-контактной конфигурации.
- PIC16F676 содержит программную память с объемом памяти около 1,7 КБ, а объем памяти RAM и EEPROM составляет 64 и 128 байтов соответственно.
- В устройство добавлен 10-разрядный модуль АЦП с 8 аналоговыми каналами. Этот модуль играет жизненно важную роль для взаимодействия с датчиками и преобразования аналоговых значений в цифровые.
- Сброс при включении питания, Компаратор, внутрисхемное последовательное программирование и общий сброс сброса — это некоторые другие функции, встроенные в устройство, которые помогают ему опережать другие встроенные микросхемы и устраняют необходимость покупки внешних компонентов для выполнения различных операций.
1. Распиновка и описание PIC16F676
У вас есть краткий обзор этого контроллера. В этом разделе мы рассмотрим распиновку и описание каждого контакта. Давайте начнем. РаспиновкаНа следующем рисунке показана распиновка PIC16F676.
Описание выводов
Описание выводов поможет вам понять основную функцию, связанную с каждым выводом. В следующей таблице показано полное описание каждого вывода.| Контакт # | Имя контакта | Описание контакта | |||
|---|---|---|---|---|---|
| 13 | RA0AN0CIN + ICSPDAT | Цифровой вход / выход Пин Аналоговый канал 0-аналоговый канал ввода-вывода 0-Компаратор ВходFRC | I / O PinAnalog канал 1Comparator InputVoltage ReferenceProgrammin Часы|||
| 11 | RA2AN2COUTT0CKIINT | Digital I / O PinAnalog Channel 2Comparator OutputClock Вход для Timer0Interrupt | |||
| 4 | RA3MCLRVPP Input | Digital I / O PinMaster Clear ResetProgramming Напряжение | |||
| 3 | RA4T1GAN3OSC2CLKOUT | Цифровой таймер ввода / вывода PinGate 1 Аналоговый канал 3 Выход кристаллического осциллятора.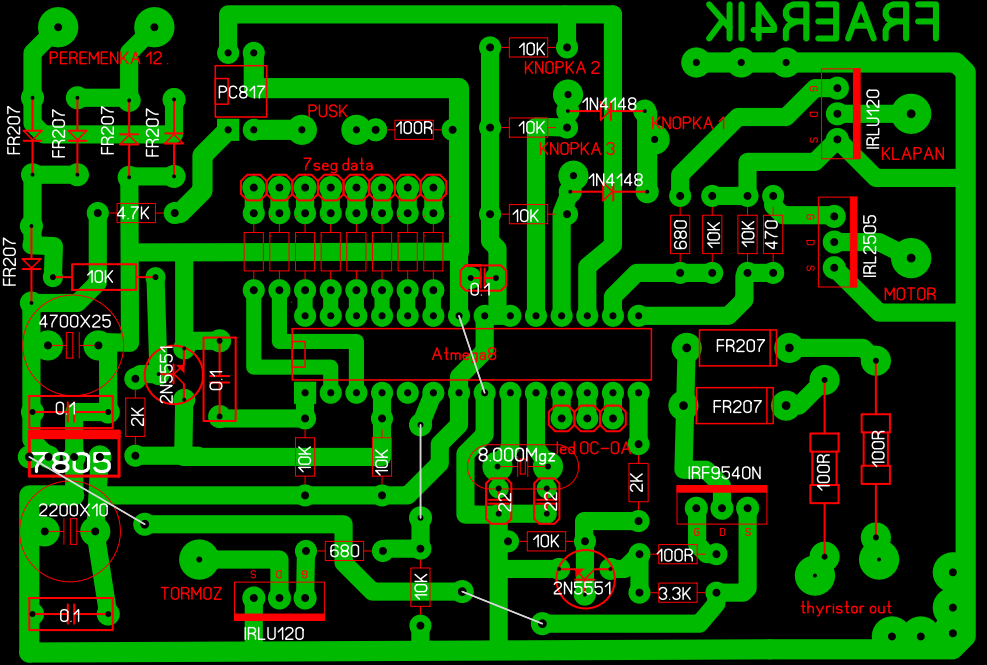 В режиме RC этот вывод имеет частоту 1/4 от OSC1 В режиме RC этот вывод имеет частоту 1/4 от OSC1 | |||
| 2 | RA5T1CKIOSC1CLKIN | Цифровой I / O Таймер синхронизации 1 Вход кристаллического осциллятора Вход внешнего тактового сигнала | |||
| 10 | Вход аналогового сигнала RC0AN 4|||||
| 9 | RC1AN5 | Цифровой вход / выход, аналоговый канал 5 | |||
| 8 | RC2AN6 | Цифровой вход / выход, аналоговый канал 6 | |||
| 7 | Канал 7|||||
| 6 | RC4 | Вывод цифрового ввода / вывода | |||
| 5 | RC5 | Вывод цифрового ввода / вывода | |||
| 14 | VSS | Вывод заземления | VDD | Вывод напряжения питания |
2.PIC16F676 Характеристики
Вы до сих пор владеете распиновкой и описанием каждого пина. В этом разделе мы выделяем и обсуждаем особенности этого контроллера, которые делают его уникальным среди аналогов. На следующем рисунке показан полный набор функций PIC16F676.| Характеристики PIC16F676 | |||
|---|---|---|---|
| Количество контактов | 14 | ||
| CPU | 8-битный PIC | ||
| Рабочее напряжение | от 2 до 5.5 В | ||
| Программная память | 1,7 Кбайт | ||
| Тип программной памяти | Флэш-память | ||
| ОЗУ | 64 байта | ||
| EEPROM | 1284 байта | ADC | 10-Bit8|
| Порты ввода / вывода (2) Контакты ввода / вывода | A, C12 | ||
| Режим энергосбережения | Да | ||
| Внешний осциллятор | |||
| Таймер (2) | 16-битный таймер (1) 8-битный таймер (1) | ||
| Производитель | Microchip | ||
| Компараторы | 1 | ||
| Индивидуальное программирование Слабое подтягивание 2 | |||
| Сохранение данных EEPROM | 40 лет | ||
| Сторожевой таймер | Да | ||
| Сброс при включении питания | Да es | ||
| Master Clear Reset | Да | ||
| Внутрисхемное последовательное программирование | Да | ||
| Минимальная рабочая температура | -40 C | ||
| Максимальная рабочая температура | Максимальная рабочая температура |
Эти функции помогут вам выбрать желаемый контроллер и помогут вам принять окончательное решение на основе требований вашего проекта. 3. Функции PIC16F676С этим модулем PIC связан ряд функций. Ниже приведены основные функции PIC16F676.Общий сброс сброса (MCLR)MCLR — это внешний сброс для микросхемы, который выполняется путем удержания этого вывода в НИЗКОМ состоянии. Этот вывод не зависит от внутренних сбросов, которые также содержат фильтр шума для обнаружения и удаления небольших импульсов на пути. ТаймерPIC16F676 поставляется с двумя таймерами, один из которых — 8-битный, а другой — 16-битный.Их можно использовать как таймер, так и счетчик. Оба таймера имеют возможность выбора часов. Режим таймера используется для создания задержки в любой функции, в то время как счетчик используется для подсчета количества внутренних элементов любой функции.Внутрисхемное последовательное программированиеIn- Последовательное программирование схемы (ICSP), также называемое внутрисхемным программированием (ISP), добавлено в устройство, которое помогает в программировании устройства после установки в определенном проекте.Сторожевой таймерСторожевой таймер — очень полезная функция, которая сбрасывает контроллер, если запущенная программа застревает в бесконечном цикле или программное обеспечение показывает недопустимый статус. Очень сложно перезагрузить всю систему в случае сбоя, эти таймеры сэкономите кучу времени и верните систему в исходное положение без вмешательства человека.4. Компилятор PIC
5. Схема расположения памяти PIC16F676Память этого контроллера в основном делится на два типа, которые называются Организация памяти программ (ROM) Организация памяти данных (RAM) Программная память хранит программу постоянно и также известна как ROM или энергонезависимая память. Он поставляется с 13-битным программным счетчиком, который может адресовать 8k x 14 памяти программ.Первое пространство памяти размером 1k x 14 (0000h — 03FFh) может быть физически реализовано. Адрес, хранящийся в векторе сброса, загружается контроллером и остается на уровне 000h, в то время как вектор прерывания остается на уровне 0004h. В оперативной памяти, также известной как данные или энергозависимая память, программа временно хранится и зависит от источника питания. Он удаляет сохраненную программу при отключении питания. Память данных в основном разделена на два банка, которые дополнительно содержат два типа регистров, называемых регистров специального назначения регистров общего назначения Первые 32 ячейки каждого банка зарезервированы для регистров специальных функций, которые в основном используются для обработки и управления периферийным устройством. функций и классифицируются как «Ядро и периферия». В то время как регистры общего назначения остаются на 20h-5Fh, отображаются в обоих банках и реализуются как статическая RAM. Регистр СОСТОЯНИЯ. Этот регистр в основном используется для переключения между банками и содержит
 Это GPR, а регистр STATUS относится к категории SFR. TRISA. Этот регистр настраивает ПОРТА как вход или выход. Значение 0 указывает, что это вход, а значение 0 показывает выход. TRISC. Этот регистр похож на TRISA и настраивает контакты как вход или выход для PORTC. Это GPR, а регистр STATUS относится к категории SFR. TRISA. Этот регистр настраивает ПОРТА как вход или выход. Значение 0 указывает, что это вход, а значение 0 показывает выход. TRISC. Этот регистр похож на TRISA и настраивает контакты как вход или выход для PORTC. 6. Блок-схема PIC16F676Блок-схема очень полезна для раскрытия основных функций, связанных с каждым компонентом контроллера, и того, как эти функции связаны друг с другом. На следующем рисунке показана блок-схема PIC16F676.
7. PIC16F676 Проекты и приложенияМикроконтроллеры PIC широко используются во многих электронных системах для автоматизации вождения. Ниже приведены основные приложения этой версии контроллера.
8.Зачем использовать микроконтроллеры PIC
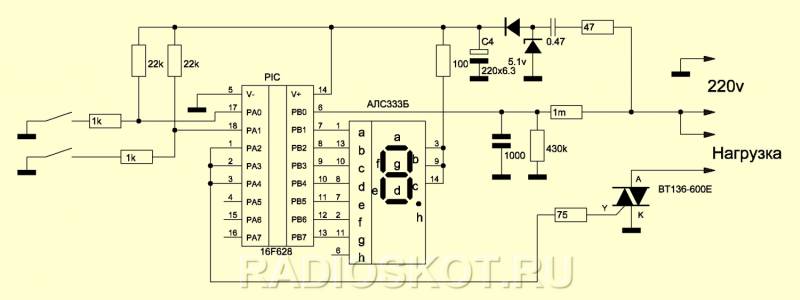 Держите нас в курсе ваших ценных отзывов и предложений, которые помогут нам предоставлять вам качественный контент в соответствии с вашими потребностями и требованиями. Спасибо, что прочитали статью. Регулятор скорости вращения вентилятора Держите нас в курсе ваших ценных отзывов и предложений, которые помогут нам предоставлять вам качественный контент в соответствии с вашими потребностями и требованиями. Спасибо, что прочитали статью. Регулятор скорости вращения вентилятора с использованием PIC16F73Падение напряжения в сети приводит к очень медленной работе вентиляторов, из-за чего вы потеете жарким летом, особенно если у вас нет кондиционера.Напряжение также может упасть из-за того, что переменный ток потребляет большой ток, что приводит к замедлению вентилятора. Так называемые регуляторы вентилятора, установленные на распределительном щите для регулирования скорости, просто уменьшают скорость вентилятора, а не увеличивают ее. Раньше регуляторы имели резисторы, которые подключались последовательно с вентилятором для снижения напряжения и, следовательно, скорости. Они имели вращающийся переключатель с шагами 1–5 для установки скорости ниже нормальной и были установлены на панели управления вместе с переключателем вентилятора, выключателем света и другими розетками. В настоящее время в регуляторах используется симистор, чтобы разрезать форму волны переменного тока и тем самым обеспечить эффективное падение напряжения и, следовательно, скорости. Эти регуляторы имеют небольшие размеры и могут компактно устанавливаться вместе с переключателями. В настоящее время нет регулятора вентилятора, который мог бы увеличить скорость вращения вентилятора сверх максимальной, когда это необходимо. Чтобы увеличить скорость вращения вентилятора, вы можете увеличить напряжение, но это невозможно. Подключение автотрансформатора с повышающим напряжением несколько увеличивает скорость, но это не стоит усилий. Обычно вентиляторы работают с максимальной скоростью около 300 об / мин, но при низком напряжении скорость падает более чем на 35 процентов. Двигатели потолочных вентиляторов имеют около 18 и более полюсов. Полная или синхронная скорость двигателя вентилятора определяется по формуле: 120 ф / с , где «f» — частота сети, а «p» — количество полюсов. Таким образом, максимальная скорость вентилятора может быть увеличена только путем увеличения частоты переменного тока, подаваемого на вентилятор.Увеличение этой частоты до 60 Гц или даже 65 Гц заставит вентилятор работать намного быстрее и будет производить хороший выброс воздуха. Если на вентилятор со скоростью 330 об / мин подается только 70% сетевого напряжения из-за падения напряжения, крутящий момент двигателя уменьшается до половины от значения крутящего момента при полном напряжении. Крутящий момент, необходимый для вращения лопастей вентилятора, пропорционален квадрату скорости. Таким образом, скорость падает до 70 процентов, когда крутящий момент падает до половины своего полного значения. Но если вы увеличиваете частоту до 60 Гц с тем же пониженным напряжением, скорость увеличивается на 20 процентов из-за увеличения частоты с 50 до 60 Гц, что приводит к падению скорости только на 10 процентов от номинальных 330 об / мин.Если увеличить частоту до 65 процентов, вентилятор будет работать еще быстрее. Повышение частоты не сильно влияет на двигатель вентилятора. Фактически, при увеличении частоты плотность магнитного потока в железе двигателя уменьшается, и это хорошо для эффективной работы двигателя вентилятора. Потери магнитной мощности не сильно увеличиваются. Таким образом, необходим способ получения мощности для вентилятора от сетевого напряжения с переменной частотой. Эта мощность должна производиться как можно более компактным, экономичным и простым способом. Доступны силовые модули для изменения скорости асинхронных двигателей. В них используются биполярные транзисторы с изолированным затвором, и они довольно дороги. Электропитание с регулируемой частотой на основе ШИМ Лучшим методом генерации переменной частоты в диапазоне от 45 до 65 Гц является широтно-импульсная модуляция (ШИМ). Ширина импульса изменяется согласно синусоиде, показанной на рис. Последовательность импульсов должна генерироваться микроконтроллером.В этом проекте импульсы (PWM1 и PWM2) попеременно появляются на двух контактах микроконтроллера PIC (см. Рис. 5). Время импульсов будет постоянным для данной частоты. Время последовательности импульсов определяет частоту. Когда через индуктивную обмотку вентилятора проходят импульсы тока, ток в среднем принимает форму синусоиды. Разрывы импульсов фильтруются индуктивностью вентилятора. Для генерации синусоидальной волны требуются две такие последовательности импульсов: одна для положительной полуволны, а другая — для отрицательной полуволны. Например, для генерации сигнала 60 Гц длительность каждого полупериода составляет 8 мс. За это время вы должны произвести последовательность импульсов. Если вы используете 16 импульсов для одного полупериода (на самом деле, мы используем гораздо больше), время для каждого импульса составляет 0,5 мс. За это время рабочий цикл или ширина импульса будет изменяться от 0,1 мс до 0,45 мс в соответствии с формой синусоидальной волны. Такая форма сигнала показана на рис. 2. На нем показана форма выходного сигнала на выводе ШИМ микроконтроллера PIC16F73 для генерации одного полупериода синусоидального сигнала с частотой около 60 Гц.Импульсы настолько близки, что их ширину невозможно увидеть по отдельности. Пик синусоидальной волны ярче, поскольку ширина больше в середине. Рис. 2: Форма выходного сигнала на выводе ШИМ от встроенного контроллера DSP для генерации одного полупериода синусоидального сигнала с частотой около 60 Гц. Импульсы настолько близки, что их ширину невозможно увидеть по отдельности. Пик синусоидальной волны ярче, поскольку ширина больше в середине. Отфильтрованный выходной ток будет иметь синусоидальную форму для каждого полупериода.Если вы измените время каждого импульса на 0,625 мс, те же 16 импульсов будут занимать время 10 мс на полупериод, генерируя синусоидальный сигнал 50 Гц. Всего 16 импульсов дадут достаточно хорошую форму волны. Чтобы изменить период синусоидального сигнала, используйте справочную таблицу синусоид, которая показывает 16 точек за полупериод. Значения: Sin (n × π) / 16 Для n = от 1 до 16. Масштабирование выполняется путем умножения этих значений на 128. Это записи справочной таблицы. Если взять табличное значение и вывести его как ширину на выводе PWM, то 16 таких точек займут всего несколько миллисекунд.Чтобы изменить частоту, каждое из значений таблицы выводится как ширина импульса более одного раза. Количество повторений каждого значения таблицы определяет период. Для изменения периода используется потенциометр для подачи переменного напряжения на аналого-цифровой преобразователь микроконтроллера. Преобразованное значение находится в диапазоне от 1 до 255. Оно делится на 16, чтобы получить значения от 1 до 16. Вычитание этих значений из числа 25 дает от 24 до 9 для диапазона потенциометра. Каждая точка таблицы повторяется 24 раза для самой низкой скорости. Для максимальной скорости каждая точка таблицы повторяется только девять раз. Девять раз по 16 очков дают один полупериод. Итак, если вы возьмете самую быструю скорость, равную 66 Гц, это будет период 15/2 мс для одного полупериода. Таким образом, время выбора каждого табличного значения и вывода его на вывод ШИМ в качестве широтно-модулированного импульса становится 7,5 / (9 × 16) мс или примерно 52 микросекунды. Прерывание от таймера 2 микроконтроллера PIC16F73 инициализируется на срабатывание каждые 52 микросекунды. 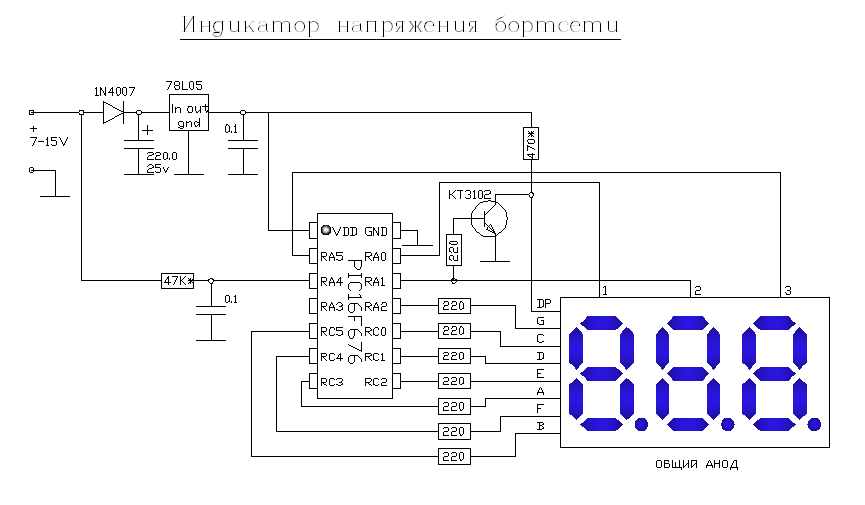 Второй сигнал ШИМ заполнит остальные полупериоды аналогично. Второй сигнал ШИМ заполнит остальные полупериоды аналогично. Программа написана на языке Ассемблер, а шестнадцатеричный файл создается с использованием интегрированной среды разработки MPLAB (IDE) или Oshon PIC simulator IDE. Байт конфигурации составляет 52H для кристалла 20 МГц, используемого в схеме PIC.Программа загружается в чип с помощью программатора PICKIT2. Программист PICKIT2 может импортировать файл как шестнадцатеричный файл и ввести байт конфигурации, щелкнув параметр «Конфигурация». Рис. 3 (b): та же форма сигнала после увеличения частоты до 65 Гц. Вышеупомянутые волны взяты на два вывода ШИМ. Волна в положениях отрицательного полупериода соответствует другому выходному выводу ШИМН-мостовая схемаПрежде чем вы определитесь со встроенным контроллером DSP, а также с тем, как он подключен и запрограммирован для генерации таких сигналов, давайте посмотрим, как импульсы синусоидального тока посылаются на двигатель и его обмотки.Обмотка должна принимать импульсы тока как для положительного, так и для отрицательного полупериода. Но мы генерируем только два набора импульсов, и они должны поступать в обмотку двигателя в прямом и обратном направлениях во время положительного и отрицательного полупериодов соответственно. Другими словами, вы должны изменить направление тока для отрицательной полупериодной последовательности импульсов. Для этого обмотки двигателя подключены в виде H-образного моста (как показано на рис. 4) к источнику постоянного тока с переключателями для направления импульсов.На рис. 4 напряжение сети (от 170 В до 240 В) выпрямляется двумя диодами и преобразуется в положительное и отрицательное напряжение постоянного тока относительно нейтральной линии источника переменного тока. Схема представляет собой только однополупериодный выпрямитель. Во время положительных полупериодов диод D1 проводит и заряжает C1. Во время отрицательных полупериодов диод D2 проводит к зарядному конденсатору C2. Оба конденсатора представляют собой электролитические конденсаторы большой емкости, каждый из которых должен быть не менее 470 мкФ, 400 В, чтобы избежать значительных пульсаций на шинах постоянного тока. Таким образом, у вас есть две шины постоянного тока, одна для положительного, а другая для отрицательного напряжения. Когда питание от сети (скажем, 200 В) выпрямляется диодом, пиковое напряжение конденсатора составляет 200x√2 = 282 В. Итак, C1 и C2 — это высоковольтные (400 В) электролитические конденсаторы. Все компьютерные платы SMPS неизменно используют их. Используемая здесь конфигурация H-моста фактически является полумостом. Как и мост Уитстона, у него четыре руки. Два плеча на левой стороне имеют конденсаторы C1 и C2, центральный переход удален.Правая сторона состоит из двух переключателей (S1 и S2) один под другим, подключенных между положительной и отрицательной шинами постоянного тока. Между двумя переключателями есть точка соединения. Нагрузка, в нашем случае вентилятор, должна быть подключена между двумя переходами. Переключатели S1 и S2 на рис. 4 на самом деле являются транзисторами (биполярными, MOSFET или IGBT). Вы можете выбрать подходящие транзисторы в соответствии с требуемым номиналом и по самой низкой цене. Одновременно включен только один из переключателей.Скажем, форма сигнала последовательности импульсов, показанная на рис. 1, используется для включения переключателя S1. Ток будет течь от положительной стороны к переключателю, а затем через нагрузку вентилятора к точке соединения C1 и C2. Ток через нагрузку идет справа налево. Этот ток составляет положительный полупериод. Когда переключатель S2 включен с использованием второго набора импульсной последовательности, ток будет течь слева направо от нагрузки. Этот ток составляет отрицательный полупериод. Таким образом, переменный ток с частотой, генерируемой волнами ШИМ, будет подаваться на вентилятор. Когда вы применяете 60 Гц, скорость двигателя увеличивается. Используя микроконтроллер, вы можете изменять частоту от 40 до 70 Гц. Не рекомендуется увеличивать частоту двигателя вентилятора выше этого значения. Генерация синусоидального напряжения переменного тока с переменной частотойСинусоидальный сигнал переменной частоты генерируется для положительного и отрицательного полупериодов путем попеременного включения переключателей S1 и S2.S1 включается и выключается в соответствии с импульсами от PWM1, ширина которых изменяется, как показано на рис. 1, в соответствии с формой синусоидальной волны. Это время полупериода, которое составляет 20 мс для тока 50 Гц, 16 мс для тока 60 Гц и так далее. Затем следующий полупериод получается путем передачи тока с помощью переключателя S2 в обратном направлении через катушку двигателя. Переключатель S2 также многократно замыкается и размыкается в соответствии с импульсами, поступающими с вывода PWM2. Теперь основная задача — выбрать транзисторы для S1 и S2.Если используются IGBT или MOSFET, включить S1 непросто. Итак, здесь выбрана версия с биполярным транзистором. Вы можете предпочтительно использовать биполярный транзистор Дарлингтона с номинальным напряжением 350 В или более. Транзистор MJE5742 — хороший выбор с номинальным напряжением 400 В, коэффициентом усиления 100 и максимальным номинальным током 8 А. Но это дорого. Так что нужно идти на компромисс. Для включения транзисторов импульсами ШИМ необходимо применение оптоизоляторов. Оптоизоляторы имеют светодиод и фототранзистор в одном корпусе, обычно это 6-контактный DIP.Когда импульсы тока подаются на светодиод в оптоизоляторе через резистор, включается фототранзистор внутри. Этот транзистор подключен через коллектор к базе переключающего транзистора. Таким образом, каждый импульс включает переключатель на время, равное ширине импульса, и пропускает ток через катушку двигателя, подключенную между двумя точками соединения — переключателями и конденсаторами, как показано на рис. 4. Выбор оптоизолятора важен по двум причинам. Во-первых, он должен иметь такое сопротивление фототранзистора, чтобы через базу переключающего транзистора протекал соответствующий ток. Такие оптоизоляторы с номиналом 300 В доступны для значения VCE фототранзистора. К ним относятся h21D1, SDD400H, SFH618A-5 и HCPL2503 от нескольких производителей. Также можно использовать оптоизолятор с симисторным приводом MOC3020. Цепь регулятора скорости вентилятораПосле того, как мы увидели, как переключатели включаются импульсами PWM1 и PWM2, чтобы генерировать синусоидальный ток переменной частоты в катушке, блок-схема, показанная на рис.5 можно легко выполнить. Использование ИК-пульта дистанционного управления необязательно. Рис. 5: Блок-схема регулятора скорости вращения вентилятораПолная принципиальная схема без ИК-пульта дистанционного управления показана на рис. 6. Он имеет микросхему PIC16F73, запрограммированную кодом, написанным на языке Ассемблер. Импульсы ШИМ, поступающие с его контактов 12 и 13, должны быть проверены осциллографом. Для просмотра синусоидальной волны можно использовать фильтр R-C, как показано на рис. 2. Изменяя потенциометр VR1, вы можете изменять частоту синусоидальной волны. Инжир.6: Принципиальная схема регулятора скорости вращения вентилятора На оптоизоляторы h21D1 подаютсяимпульсов ШИМ. Для потолочных и настольных вентиляторов, если используется оптоизолятор h21D1, переключающие транзисторы могут быть MJE13005 или 3039. Верхняя часть схемы регулятора скорости вращения вентилятора (показанная на рис. 6) безопасна, так как работает только от низкого напряжения. Но после подачи питания на мост опасно прикасаться к любой части цепи. Включите схему, используя VR1 с ручкой. На рис. 6 в нижней части схемы показано подключение к сети 230 В переменного тока.Для нагрузки вентилятора используются диоды 1N4007, так как они имеют высокую индуктивность. Схема очень проста в подключении. Вы даже можете собрать его на макетной плате, так как транзисторы 3-контактные типа TO220. Используйте подходящие радиаторы для транзисторов T1 и T2. После подключения цепи включите питание от сети переменного тока. Рекомендуется сначала использовать регулируемый автотрансформатор и медленно изменять напряжение от 140 В. В противном случае предохранитель может перегореть при запуске из-за неисправности проводки. Подключите вентилятор к цепи через подходящий разъем.Для потолочного вентилятора, уже установленного в вашей комнате, соединения вентилятора должны быть изолированы и подключены к цепи через длинный двойной гибкий провод для тестирования. Вентилятор должен работать со скоростью, контролируемой VR1. Скорость вентилятора увеличивается на восемь ступеней с помощью регулировки VR1. VR1 следует сначала установить на максимальное значение, чтобы снизить скорость при запуске. Затем его можно опустить вниз, чтобы увеличить скорость вентилятора. Невозможно наблюдать форму выходного напряжения на осциллографе, так как точка заземления осциллографа не должна получать горячее напряжение.Для осциллографа необходимо использовать изолирующий трансформатор, чтобы вы не касались входного контакта осциллографа. В противном случае можно подключить небольшой трансформатор (первичная обмотка 230 В и вторичная обмотка 9 В) вместо вентилятора или параллельно с ним, а вторичное напряжение (9 В) будет измеряться для формы волны и частоты. Этот метод был использован автором для создания положительных и отрицательных шин постоянного тока, и он показал хорошую форму синусоидальной волны с некоторой плавающей пульсацией 50 Гц, поскольку питание от сети не является двухполупериодным выпрямителем, а используемые конденсаторы также являются электролитическими только на 470 мкФ.Это никак не влияет на рабочую скорость вентилятора. Строительство и испытания Компоновка печатной платы регулятора скорости вращения вентилятора показана на рис. 7, а расположение его компонентов — на рис. 8. После сборки схемы поместите ее в подходящую коробку.  7: Внешний вид печатной платы регулятора скорости вращения вентилятора Рис. 8: Компоновка компонентов для печатной платы 7: Внешний вид печатной платы регулятора скорости вращения вентилятора Рис. 8: Компоновка компонентов для печатной платы Загрузите компоновку печатной платы и компонентов в формате PDF:щелкните здесьСкачатьисходный код1.После проверки правильности подключения цепи подключите батарею 9 В и включите цепь с помощью VR1. LED1 на плате должен светиться. 2. Проверьте контакты 12 и 13 микросхемы PIC16F73 на наличие импульсного выхода. Для этого используйте логический пробник или CRO, если таковой имеется. Ширина импульса зависит от VR1. Вы можете заметить небольшое напряжение 0,2 В или около того на контакте 1 каждого чипа h21D1 по сравнению с минусом источника питания 9 В. Это означает, что переменная синусоида ШИМ правильно генерируется микросхемой. 3. Теперь подключите вентилятор к разъему CON2. Убедитесь, что вы включили встроенный переключатель вентилятора. 4. Подключите сетевое питание 230 В к разъему CON1. Рекомендуется использовать регулируемый автотрансформатор и сначала подать напряжение 140 В, чтобы увидеть, как работает вентилятор. При изменении VR1 по часовой стрелке скорость вентилятора увеличивается пошагово. Вентилятор можно выключить, вернув VR1 назад и выключив его встроенный выключатель.
5. Если вентилятор не работает, перегорает предохранитель или нагреваются резисторы на 10 Ом.В этом случае проверьте транзисторы с помощью мультиметра на предмет короткого замыкания эмиттер-коллектор с обеих сторон. Микроконтроллер PIC саморегулирует свой источник питания с помощью ШИМ Разработка потребительских товаров часто может включать проектирование небольших недорогих портативных схем с батарейным питанием со встроенным контроллером. Представленная здесь идея использует аналого-цифровой преобразователь (АЦП) и аппаратное обеспечение с широтно-импульсной модуляцией (ШИМ) в процессоре PIC16C72 для реализации эффективного и недорогого регулирующего источника питания (см. Рисунок).Во-первых, обычная 9-вольтовая батарея понижается (с помощью R2) до регулируемого значения от 4,6 В до 7,0 В. Источник питания предназначен для подачи менее 10 мА с минимальной пульсацией, но может выдавать до 40 мА, если пульсации могут быть больше. терпимо. Пульсации также можно уменьшить, увеличив номиналы индуктивности и конденсатора, если позволяет размер, и изменив программное управление с обратной связью. Хотя показанная топология источника питания не имеет функциональных возможностей, она является отправной точкой для проектирования любого количества автономных систем с батарейным питанием, которым требуется встроенный процессор.В этом примере накладные расходы программного обеспечения для управления источником питания составляют всего около 10%. За счет использования компонентов для поверхностного монтажа и добавления других схем с низким энергопотреблением (таких как ЖК-дисплеи, операционные усилители CMOS и датчики) эта схема представляет собой хорошую отправную точку для реальных приложений. Схема работает следующим образом. Когда переключатель включения / выключения S1 включен, PIC первоначально получает питание через D2 с достаточной мощностью (регулируемой R1 и стабилитроном D1 5,1 В), так что PIC может выйти из состояния сброса и начать регулирование как ступенчатое. вниз контроллер.Как только PIC выходит из состояния сброса, он начинает управлять понижающим регулятором LC с помощью сигнала с частотой 50 кГц с широтно-импульсной модуляцией через двойные (n-канальный и p-канальный) полевые транзисторы, содержащиеся в IRF7105 (Q1). Если к этой системе добавляется какая-либо дополнительная схема, следует позаботиться о том, чтобы она не перегружала цепь слишком сильно во время начального этапа включения питания. Как только понижающее напряжение превышает напряжение, поступающее через D2, тогда R1, D1 и D3 просто действуют как опорные напряжения для PIC ADC.Схема, как показано на рисунке, потребляет приблизительно 4 мА от батареи с регулируемым напряжением, установленным на 5 В. ШИМ-управление в этом примере полностью выполняется во время процедуры обработки аналого-цифрового прерывания. Master Clear Pin Внешний сбросMCLR: — Вывод Master Clear — это дополнительный внешний сброс, который активируется при понижении уровня на выводе. Вывод MCLR можно настроить как стандартный вывод цифрового входа или включить как внешний вывод сброса. Это контролируется настройкой конфигурации. Вывод MCLR, когда он включен, будет удерживать устройство в режиме сброса до тех пор, пока на выводе будет установлен низкий уровень. Во время нормальной работы его необходимо подтянуть к высокому уровню обычно через резистор к Vdd. Небольшой конденсатор можно подключить от вывода MCLR к земле, чтобы дольше удерживать устройство в режиме сброса при понижении уровня короткого сигнала. Можно также добавить нормально разомкнутый переключатель мгновенного действия от MCLR к земле, чтобы обеспечить ручной способ сброса устройства. Работа MCLRКогда происходит внешний сброс MCLR, счетчик программ будет сброшен до вершины выполнения программы или ячейки памяти 0x00, которая является началом всей памяти программ.Сброс MCLR не приведет к повторной инициализации всех внутренних функций, таких как сброс при включении питания (POR) или сброс после отключения питания (BOR). Это можно рассматривать как аппаратное средство для активации программного сброса. Вывод MCLR может быть включен или отключен настройкой бита в регистре конфигурации. MCLR необходимо подтянуть до напряжения Vdd, чтобы устройство не удерживалось в режиме сброса. Если выбрана внутренняя опция, то вывод MCLR станет назначенным цифровым входным выводом. В этом режиме устройство не может быть сброшено внешним сигналом, но это позволяет упростить конструкцию. Контакт можно оставить отключенным, потому что MCLR внутренне подтянут к Vdd. Если выбрана внешняя опция, то вывод MCLR имеет полный контроль над сбросом устройства. Этот внутренний или внешний параметр выбирается путем сброса бита MCLRE (внутренний) или установки бита MCLRE (внешний).На рисунке ниже показан регистр конфигурации, содержащий бит MCLRE.
MCLR также используется совместно с выводом программирования Vpp. Таким образом, любая схема, подключенная к MCLR, должна соответствовать требованиям подключения программатора / отладчика Microsoft Word — Co-Ordinate-Load-Control-and-Load-Shedding-Balance-by-using-Microcontroller> Microsoft Word — Co-Ordinate-Load-Control-and-Load-shedding-Balance-by- using-MicrocontrollerМеждународный журнал научных и инженерных исследований Том 3, выпуск 4, апрель-2012 1 ISSN 2229-5518 Координированное управление нагрузкой и балансировка нагрузки с помощью микроконтроллера Md.Рашидул Ислам, доктор Масуд Кайсар Хан, Абу Исхак, штат Мэриленд, Форгад Аннотация — Энергия является основной необходимостью для экономического развития страны. Производство энергии обходится дороже, что для нас невозможно, поэтому мы должны распределять энергию в соответствии с максимальным правом пользователя. Сейчас ежедневное снижение нагрузки — это обычное модное слово в нашей стране, по этой причине промышленность не продолжает производство, цель нашего исследования — продолжить поток энергии в отрасли и снизить нагрузку на пользователя в качестве условия баланса.Следовательно, система управления сбросом нагрузки, которая раньше выполнялась вручную, в настоящее время управляется компьютерной системой, разработанной в некоторой степени для того, чтобы направить общество к более удобной жизни. Ключевые слова: сброс нагрузки, микроконтроллер, трансформатор тока. —————————— ——————————— Для разработки метода автоматического отключения нагрузки мы использовали различное оборудование, такое как микроконтроллер, источник питания 1. Доктор медицины Рашидул Ислам (бакалавр EEE) в настоящее время преподает в Международном исламском университете Читтагонга ( ). Электронная почта: [email protected] 2. Масуд Кайсар Хан в настоящее время изучает EEE в Интернационале трансформатор, светодиоды, фиктивная нагрузка, переключатель и т. Д. Когда нагрузка в системе увеличивается, регуляторы агрегата определяют изменение скорости и увеличивают мощность, потребляемую генератором. Дополнительная нагрузка будет обрабатываться за счет неиспользованной мощности всех генераторов, работающих в системе (вращение в обратном направлении) [1]. Если все генераторы работают на максимальной мощности (вращение в обратном направлении равно 0), необходимо отключить часть нагрузки. , равной или большей, чем перегрузка, намеренно и быстро.Поскольку частота является надежным индикатором ситуации перегрузки, можно использовать частотно-чувствительные реле для автоматического отключения части нагрузки. Эта схема называется схемой сброса нагрузки или экономии нагрузки и предназначена для защиты системы от сбоев частоты. Реле пониженной частоты обычно устанавливаются на распределительных подстанциях, где отдельные нагрузки могут быть отключены, что позволит сбалансировать нагрузку и генерацию.Первая линия этих реле настроена чуть ниже нормального рабочего диапазона частот (59,4-59,7 Гц). [5-6] Когда частота падает ниже этого уровня, эти реле снижают значительный процент нагрузок системы. Если частота стабилизируется (или увеличится), это Исламский университет Читтагонга. E-mail: masud08eee@gmail.
3. Abu Ishaque Md.Forhad в настоящее время изучает EEE в ‘Internathitotpn: // www.ijser.org Исламский университет Читтагонга. E-mail: [email protected] Международный журнал научных и инженерных исследований Том 3, выпуск 4, апрель 2012 г. 2 ISSN 2229-5518 означает, что падение нагрузки было достаточным, но если частота продолжает падать ( с более медленной скоростью), пока он не достигнет второй линии реле, второй блок нагрузки сбрасывается.Это будет продолжаться до тех пор, пока не будет снята перегрузка или пока не сработают все реле частоты. 4. ИС МИКРОКОНТРОЛЛЕРА PIC16F676 — 8-БИТНЫЙ M С 2 КБАЙТНОЙ ВСПЫШКОЙ ПРОГРАММА
ПАМЯТЬ: Фотография: Рисунок 01: Фотография PIC16F676 3.1 Расположение выводов: AY 62
3.2 Характеристики: Высокопроизводительный RISC-процессор 3,3-контактный описание: IJSER © 2012 http://www.ijser.org Международный журнал научных и инженерных исследований Том 3, выпуск 4, апрель 2012 г. ISSN 2229-5518 Рисунок 03: Стандартная конфигурация LM7805 . 5 КООРДИНАТНОЕ УПРАВЛЕНИЕ ТОКОМ5.1 Блок-схема для координированного управления током: Регуляторы напряжения — это компоненты, которые поддерживают постоянное выходное напряжение. Электронные компоненты часто рассчитаны только на низкое максимальное напряжение и могут быть серьезно повреждены скачком напряжения. Точно так же низкое напряжение может не обеспечить достаточную мощность для компонента. Регуляторы напряжения часто отвечают за поддержание напряжения в пределах диапазона, который может безопасно принять электронный компонент. Базовый стабилизатор напряжения LM7805 имеет три ножки, преобразует переменное входное напряжение и выдает постоянное регулируемое выходное напряжение. Наиболее распространенные номера деталей начинаются с номеров
78 или 79 и заканчиваются двумя цифрами, обозначающими выходное напряжение. Число 78 представляет собой положительное напряжение, а 79 — отрицательное. Стабилизаторы напряжения серии 78ХХ предназначены для положительного входа. Система контроля перегрузки и балансировки нагрузки — новая технология в Бангладеш.Сегодня ничто не требует ручного использования. Автоматическая система более надежна и безопасна для жизни. Здесь есть главная генерирующая станция, одна промышленная и две бытовые установки. Промышленность всегда снабжается электроэнергией, потому что в производственном подразделении должно использоваться бесперебойное электроснабжение. Максимальная выработка мощности нашей электростанции составляет IJSER © 2012 http://www. International Journal of Scientific & Engineering Research Volume 3, Issue 4, April-2012 4 ISSN 2229- 5518 5.2 Принципиальная схема для управления координированным током: 5.3 Источник питания: Переменный ток от вторичной обмотки трансформатора выпрямляется мостовым выпрямителем D1 — D4, который также может быть блочным выпрямителем, таким как WO4, или даже четырьмя отдельными диодами, такими как как типы 1Н4004.(См. Более поздние характеристики выпрямителя). [3] IJSER © 2012 http://www.ijser.org International Journal of Scientific & Engineering Research Том 3, Выпуск 4, апрель 2012 г. ISSN 2229-5518 абсолютный минимум, и если вы предполагается, что все время потребляет максимальный ток, затем перейдите к более высокому номиналу ВА. Здесь мы разработали интеллектуальную систему управления нагрузкой, которая является более рентабельной системой управления. Также легко обнаружить неисправность с помощью микроконтроллера. С помощью этой техники можно установить время затенения балансировки нагрузки для прав пользователя. Этот метод может быть более полезным для сохранения промышленных мощностей для эффективного производства. Также возможно отключение перегрузки для безопасности линии электропередачи. Энергетическая инфраструктура Бангладеш довольно мала, недостаточна и плохо управляется.Потребление энергии на душу населения в Бангладеш — одно из самых низких (136 кВтч) в мире. По оценкам, на некоммерческие источники энергии, такие как древесина, отходы животноводства и растительные остатки, приходится более половины энергопотребления страны. Бангладеш имеет небольшие запасы нефти и угля, но очень большие ресурсы природного газа. Коммерческое потребление энергии — это в основном природный газ (около 66%), за которым следуют нефть, гидроэнергетика и уголь. Бангладеш — развивающаяся страна.Электричество является основным источником энергии для большинства видов экономической деятельности страны. Установленная электрическая мощность Бангладеш в 2009 году составляла 4,7 ГВт; только три четверти из них считаются «доступными». Только 40% населения имеют доступ к электроэнергии с доступностью 136 кВтч на душу населения в год. Мы стараемся развивать нашу страну изо дня в день. Но у нас нет современных технологий для применения нашей ЛЭП. Большинство устройств мы покупаем из другой страны. это очень рентабельно для нашей страны. В этой статье была подтверждена важность своевременного применения действия по сбросу нагрузки. Если пространственное действие не выполняется вовремя, необходимо выполнить более болезненное действие по сбросу нагрузки 9 ССЫЛКИ:[1] К. Конкордия, Л. Х. Финк и Герог Пулликкас, «Снятие нагрузки в изолированной системе», IEEE Trans. Power Syst., Т. 10, pp. 1467-1472, Aug. 1999. [2] Д. Гилфойл, Э. Коннолли, «Распределенные системы SCADA для управления распределением электроэнергии», Power Technology Int., pp. 169-172, 1998. [3] C.Bouchoucha, N.mansouri, M.Annabi. Адаптация производства к потреблению электроэнергии и проектирование наладки в сетевых системах. GEI2002, март 2002 г. [4] О. Мойя, «Отключение нагрузки с компьютерным управлением в энергосистеме», «Исследование электроэнергетических систем», стр. 165-171, апрель 1996 г. [5] Отключение нагрузки — руководство по применению, Джон Берди , General Electric Company Electric Utility Engineering Operation, Скенектади, Н.Y. [6] Пванг и Р. Биллинтон, Оптимальный метод сброса нагрузки для снижения общей стоимости прерывания работы потребителя в системе распределения, IEE Proc.-Gener. Трансм. Дистриб., Т. 147, No. I, январь 2000 г. IJSER © 2012 http://www.ijser.org pic16f676mcubasedproject: October 2014
Это ИК-пульт дистанционного управления, который можно использовать для управления другими устройствами или цепями до 10 устройств. Выход (реле) работает как переключаемый выход, поэтому, когда завершится декодирование правой ИК-команды, выход включится, и если та же ИК-команда будет отправлена снова, выход выключится.. подробнее о Наши Характеристики продукта и преимущества: , перечисленные ниже для вашего вида — Ссылка . Индикация включения Все цифровые кнопки включения / выключения для ручного управления Каждая световая точка может выдерживать нагрузку 300 Вт с использованием встроенного реле. Встроенный ВКЛ и ВЫКЛ. Встроенная память для света / вентиляторов в Предыдущее состояние после возобновления подачи питания Полнофункциональный пульт дистанционного управления Удаленное рабочее расстояние до 20-25 футов Уменьшите счет за электричество, выключив свет и вентилятор сразу с пультом дистанционного управления, когда не требуется
Он также поддерживает инвертор. Удаленное управление предохраняет нас от риска поражение электрическим током и короткое замыкание. Изменения в существующую проводку не требуются при установке нашего агрегата. Простая установка. Основные преимущества a Пульт дистанционного управления Система по сравнению с механическое переключение Системы : — Система сохраняет ненужное Электромонтаж и выключатели 2х ходовой переключения. Искробезопасность и бесконтактность Коммутация увеличивает срок службы переключателей. Предотвращает детей от риска поражение электрическим током и короткое замыкание. Это благо для физически инвалидов. Может быть установлен во всех больницах комнат для постельных принадлежностей пациентов. Все спальные комнаты для пожилых людей и человек в возрасте Эта система дистанционного управления может использовать в любом: Дом, офис, рестораны, магазины, больницы и Конференция или семинар залы и т. Д … Очень полезно для: — Все дома, особенно у кровати номеров и залов, Дети, у которых нет коммутатора доступен, Аудитории и конференции залов, Прикованный к постели терпение и возраст человек, инвалиды, Больницы и клиники. Звездные отели, магазины,
Рестораны и т. Д. Технические характеристики: — Рабочее напряжение 180-280 В переменного тока Частота 50 Гц Нагрузочная способность каждого переключателя — 300 Вт Инфракрасный пульт дистанционного управления Пульт дистанционного управления Рабочий диапазон 20-25 футов Используйте одну батарею «CR 2032» для пульта ДУ Итого «Пульт ДУ »Система »состоит из следующих частей: · 8-модульный переключатель Доска — в ремонте в предоставленном месте для распределительного щита. · Пульт ДУ — Ручной блок для включение / выключение · Необходимый набор из стяжка. Добавляет больше комфорта в вашу спальню и позволяет спокойно спать по команде кнопка Это работают как Искробезопасное и бесконтактное переключение увеличивает срок службы переключателя Инновационная система дистанционного управления для вашего существующий распределительный щит Подробные сведения см. В руководстве по эксплуатации описание Тип продукта: Пульт дистанционного управления с функцией включения / выключения Дистанционное рабочее напряжение: 3 В постоянного тока (батарейки размера Botton) Этот уникальный пульт дистанционного управления также помогает в управлении УР электротовары Служит благом для пожилых людей, а также инвалидов Простота установки Защищает детей от риска поражения электрическим током
и короткое замыкание. | |

 Скорость бега намного меньше этого значения.
Скорость бега намного меньше этого значения. 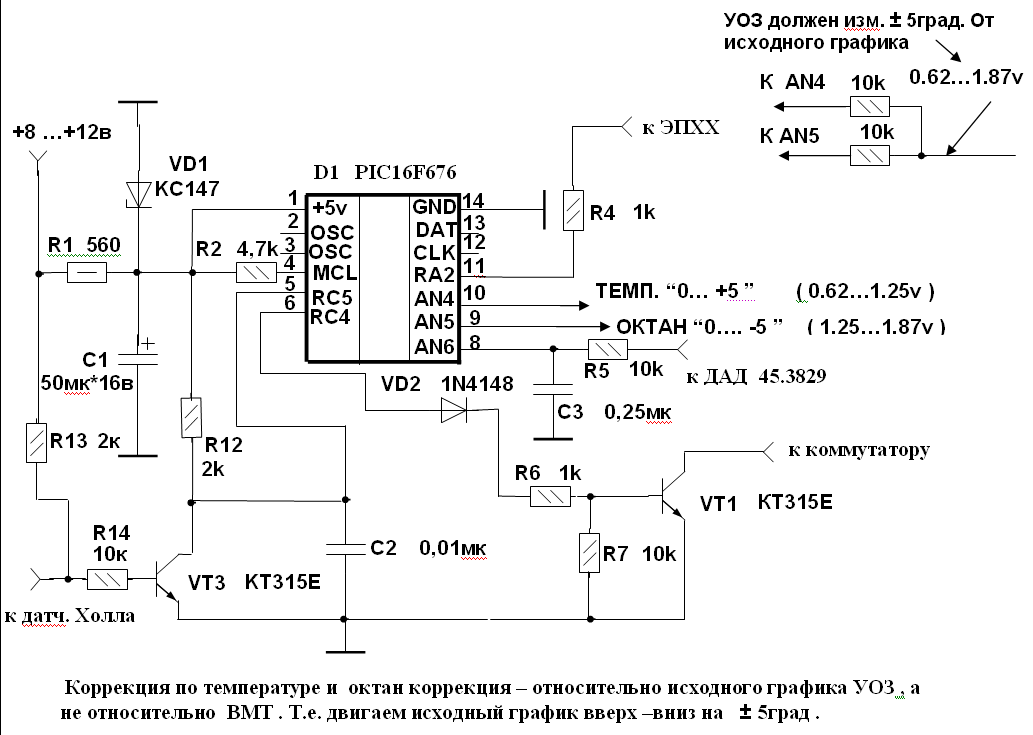 1.
1. 


 Во-вторых, его номинальное напряжение в закрытом состоянии должно составлять 300 В.
Во-вторых, его номинальное напряжение в закрытом состоянии должно составлять 300 В. 
 Благодаря наличию недорогих 8-битных процессоров, обладающих множеством функций, эту задачу можно решить, позволив процессору делать как можно больше. Одна из функций, с которой процессор может справиться с минимумом внешних компонентов и небольшими затратами на программное обеспечение, — это регулирование собственного источника питания.
Благодаря наличию недорогих 8-битных процессоров, обладающих множеством функций, эту задачу можно решить, позволив процессору делать как можно больше. Одна из функций, с которой процессор может справиться с минимумом внешних компонентов и небольшими затратами на программное обеспечение, — это регулирование собственного источника питания. 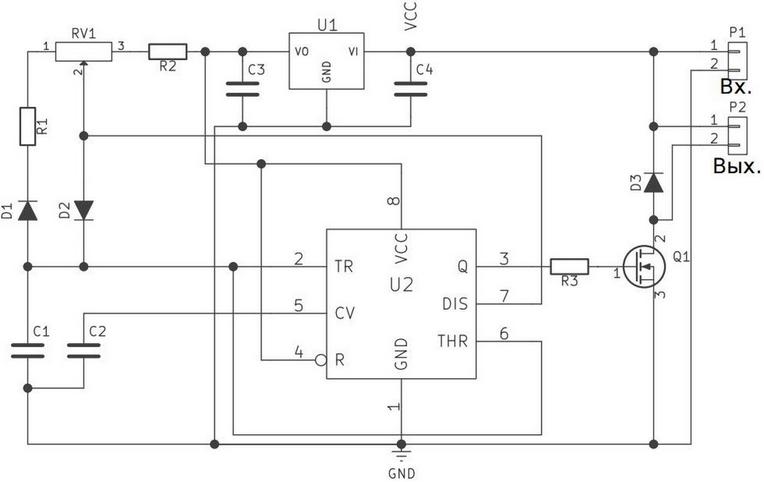
 Это может быть сделано внутри с помощью схемы, включенной внутри устройства, или снаружи с помощью схемы, подключенной к устройству.
Это может быть сделано внутри с помощью схемы, включенной внутри устройства, или снаружи с помощью схемы, подключенной к устройству. В этой статье основное внимание уделяется разработке процедуры на основе микроконтроллера для управления системой сброса нагрузки, при которой ручная работа будет сведена к минимуму путем выбора пользователем фидера, подстанции и продолжительности времени отключения, а также простоты обнаружения неисправности с помощью микроконтроллера. производство, отключение перегрузки для безопасности линии электропередачи.
В этой статье основное внимание уделяется разработке процедуры на основе микроконтроллера для управления системой сброса нагрузки, при которой ручная работа будет сведена к минимуму путем выбора пользователем фидера, подстанции и продолжительности времени отключения, а также простоты обнаружения неисправности с помощью микроконтроллера. производство, отключение перегрузки для безопасности линии электропередачи.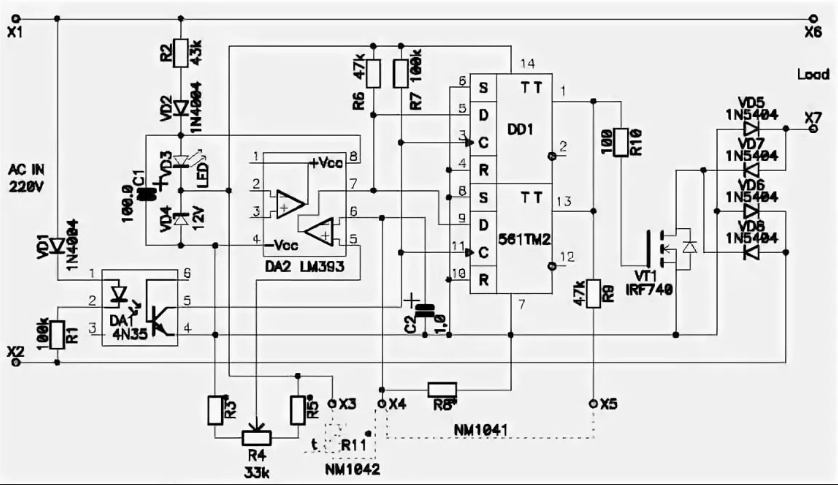 Используемая здесь технология представляет собой встроенную технологию, которая является будущим современной современной электроники.
Используемая здесь технология представляет собой встроенную технологию, которая является будущим современной современной электроники. 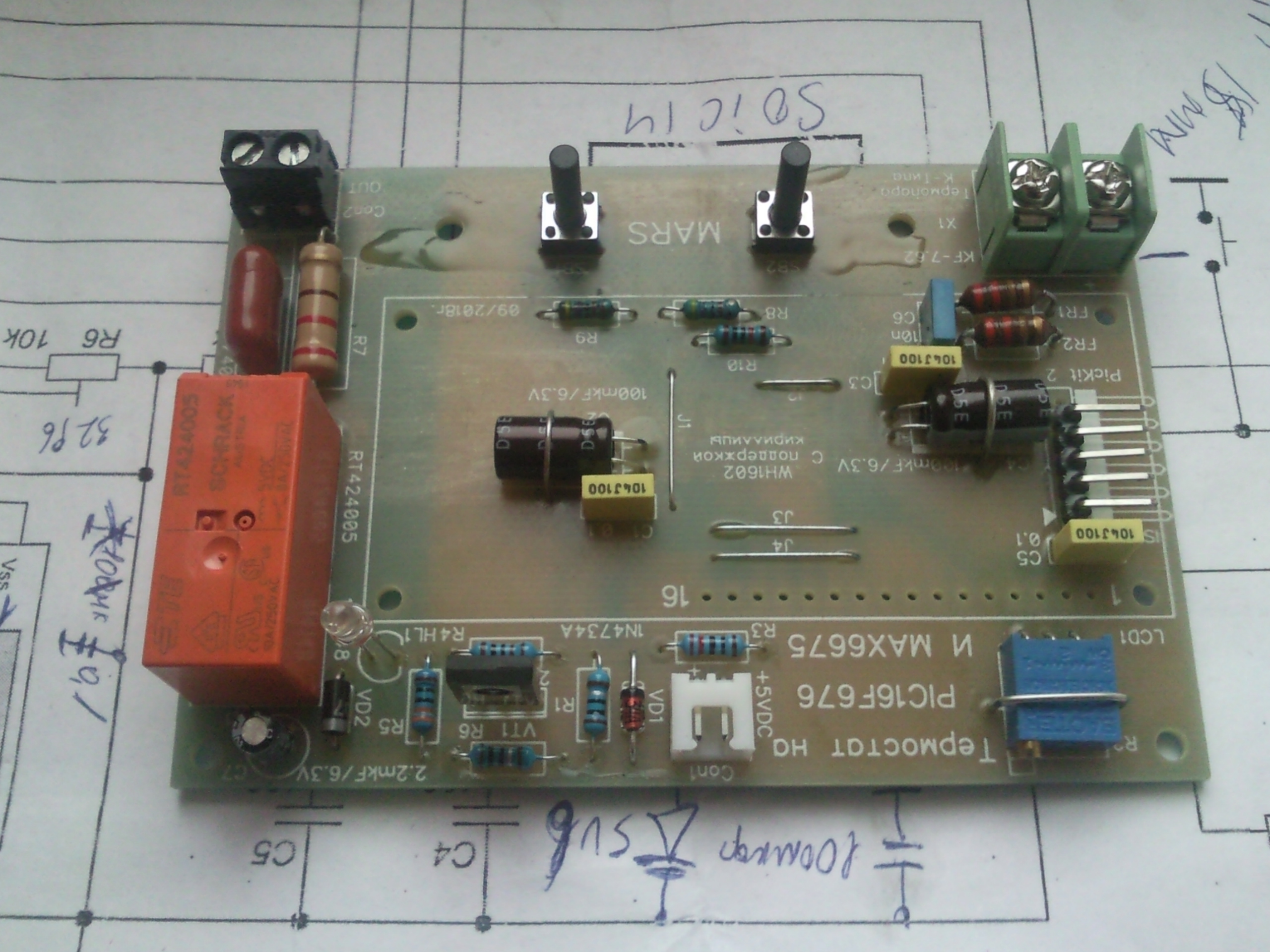 com IJSER © 2012
com IJSER © 2012  3
3  ijser.org
ijser.org  Напряжение вторичной обмотки трансформатора, заявленное, скажем, 20 ВА, будет намного больше, если вторичная обмотка будет слегка нагружена.
Напряжение вторичной обмотки трансформатора, заявленное, скажем, 20 ВА, будет намного больше, если вторичная обмотка будет слегка нагружена.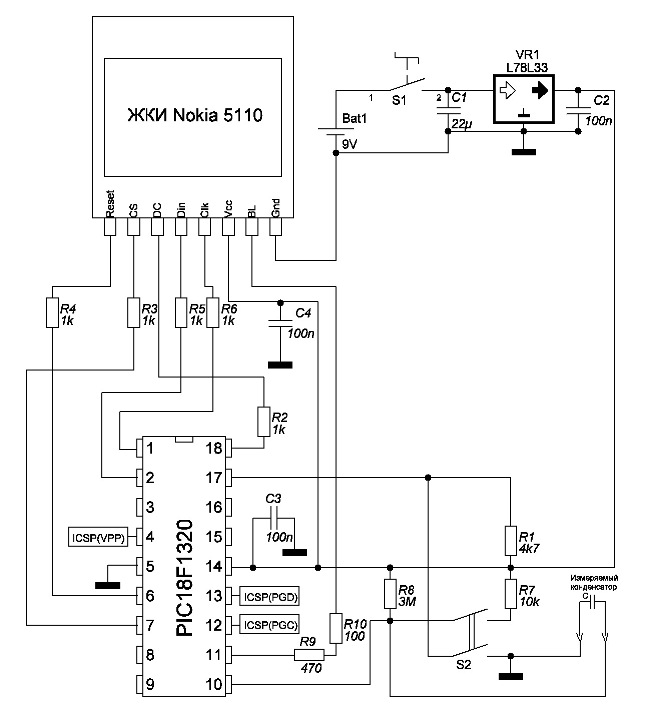 5
5 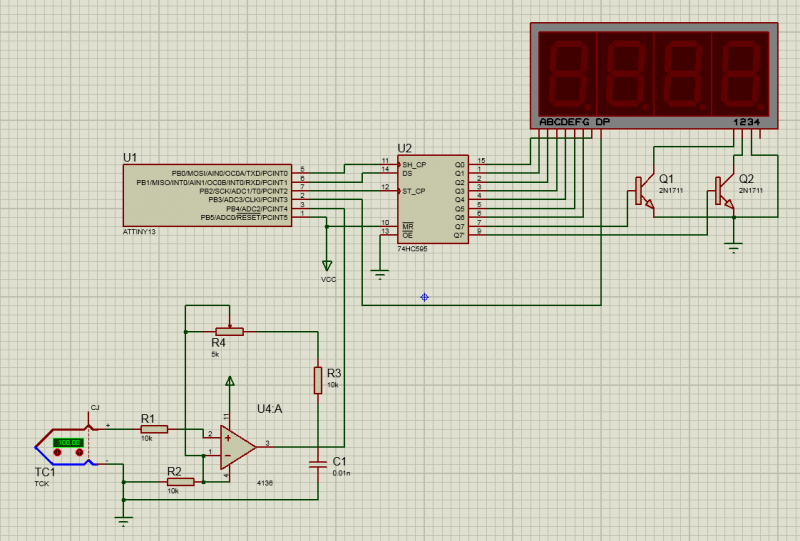 Поэтому мы пытаемся разработать устройство, которое обезопасит нашу линию электропередачи и предоставит пользователю максимальное право на использование энергии, контролируя затенение нагрузки, когда наше производство снижается из-за использования нагрузки.
Поэтому мы пытаемся разработать устройство, которое обезопасит нашу линию электропередачи и предоставит пользователю максимальное право на использование энергии, контролируя затенение нагрузки, когда наше производство снижается из-за использования нагрузки. 



