Как работает регулятор оборотов для коллекторного двигателя постоянного тока. Какие элементы входят в схему регулятора. Как собрать и настроить регулятор оборотов своими руками. Какие преимущества дает использование регулятора оборотов.
Принцип работы регулятора оборотов коллекторного двигателя
Регулятор оборотов для коллекторного двигателя постоянного тока позволяет плавно изменять скорость вращения вала двигателя. Принцип его работы основан на изменении напряжения, подаваемого на обмотки двигателя.
Основные компоненты типичного регулятора оборотов:
- Силовой ключ (транзистор или симистор)
- Схема управления ключом (ШИМ-контроллер)
- Цепь обратной связи по току двигателя
- Регулировочный потенциометр
Схема управления формирует ШИМ-сигнал, который управляет открытием и закрытием силового ключа. Изменяя скважность ШИМ-сигнала с помощью потенциометра, можно регулировать среднее напряжение на двигателе и, соответственно, его обороты.
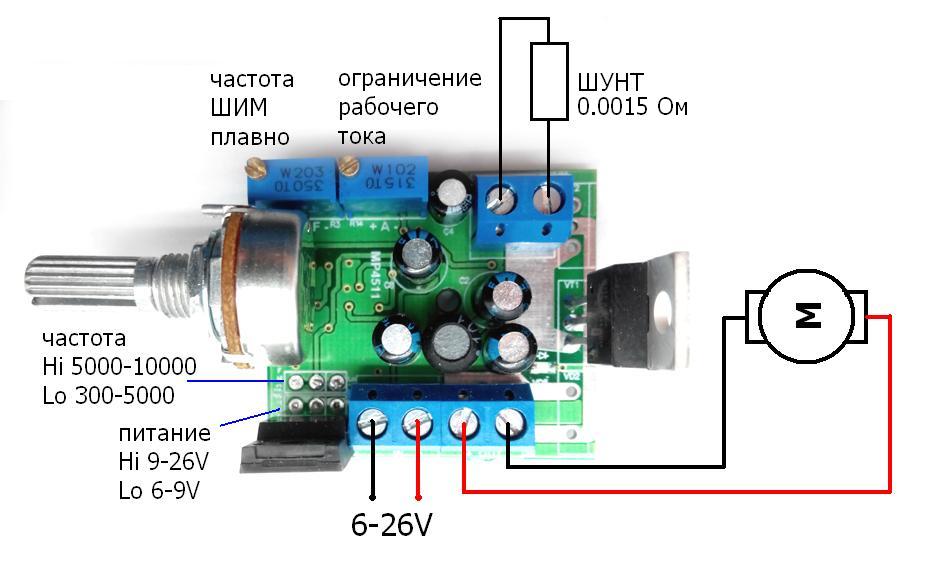
Схема регулятора оборотов на микросхеме MC34063
Рассмотрим схему простого регулятора оборотов на базе импульсного стабилизатора MC34063:
«` «`Ключевые элементы схемы:
- MC34063 — импульсный стабилизатор с встроенным силовым ключом
- Шунт для измерения тока двигателя
- Операционный усилитель для усиления сигнала с шунта
- Потенциометр 10 кОм для регулировки оборотов
Как собрать регулятор оборотов своими руками
Чтобы собрать простой регулятор оборотов коллекторного двигателя, потребуются следующие компоненты:
- Микросхема MC34063
- Потенциометр 10 кОм
- Резисторы, конденсаторы согласно схеме
- Печатная плата
- Радиатор для MC34063
Порядок сборки:
- Изготовьте печатную плату по схеме
- Припаяйте компоненты, начиная с самых низких
- Установите MC34063 на радиатор
- Подключите потенциометр
- Проверьте монтаж и отсутствие замыканий
Настройка и использование регулятора оборотов

- Подключите регулятор к источнику питания и двигателю
- Установите потенциометр в среднее положение
- Измерьте напряжение на двигателе
- Подстройте резистор обратной связи для получения нужного диапазона регулировки
- Проверьте работу во всем диапазоне оборотов
При использовании плавно вращайте ручку потенциометра для изменения оборотов двигателя. Не допускайте длительной работы на максимальных оборотах.
Преимущества использования регулятора оборотов
Применение регулятора оборотов для коллекторного двигателя дает следующие преимущества:
- Плавное изменение скорости вращения
- Снижение пусковых токов двигателя
- Увеличение срока службы двигателя и редуктора
- Снижение шума при работе на пониженных оборотах
- Экономия электроэнергии
Регулятор позволяет подобрать оптимальные обороты для разных режимов работы, что повышает удобство использования электроинструментов и бытовой техники с коллекторными двигателями.
Области применения регуляторов оборотов
Регуляторы оборотов коллекторных двигателей постоянного тока широко используются в различных сферах:
- Электроинструменты (дрели, шуруповерты, лобзики)
- Бытовая техника (миксеры, блендеры, пылесосы)
- Автомобильные электродвигатели (вентиляторы, стеклоочистители)
- Модели и игрушки на радиоуправлении
- Промышленные приводы и автоматика
Везде, где требуется плавное и точное управление скоростью вращения коллекторного двигателя, находят применение регуляторы оборотов.
Типы регуляторов оборотов
Существует несколько основных типов регуляторов оборотов коллекторных двигателей:
- Резисторные — простейшие регуляторы на переменном резисторе
- Тиристорные — на основе симисторов или тиристоров
- Транзисторные — с ШИМ-управлением на полевых или биполярных транзисторах
- На специализированных микросхемах — компактные и функциональные
Выбор типа регулятора зависит от мощности двигателя, требуемого диапазона регулировки, условий эксплуатации и других факторов.
Возможные неисправности регуляторов оборотов
При эксплуатации регуляторов оборотов могут возникать следующие проблемы:
- Отсутствие регулировки оборотов
- Нестабильная работа на малых оборотах
- Перегрев силовых элементов
- Выход из строя при перегрузках
- Помехи в работе других электронных устройств
Большинство неисправностей связано с выходом из строя силовых элементов или нарушением настройки. При возникновении проблем необходимо проверить все компоненты схемы и провести повторную настройку регулятора.
Страница не найдена | Каталог самоделок
Обсуждения
Содержание1 Распиновка гарнитуры Apple EarPods2 Распиновка гарнитуры Canyon CNE-CEPM013 Распиновка гарнитуры Beats4 Распиновка гарнитуры
High-Tech
Содержание1 Понадобится некоторое программное обеспечение:2 Этап 2: приспособления необходимые для постройки основания3 Этап 3:
Электрика для начинающих
Начинающим радиолюбителям наверняка интересен вопрос изоляции транзистора (одного или группы) на радиаторе./F036M_(6-90V-15A)-05.JPG) Если рассматривать
Если рассматривать
Поделки для авто
Существует очень простой способ защиты автомобильного АКБ от переполюсовки. Если аккумулятор неправильно подключить к
Обсуждения
Помогите мне пожалуйста советом как собрать аккумулятор из 18650. буду брать б/у из батарей
Arduino
Содержание1 Принцип работы охранного устройства на Arduino./F036M_(6-90V-15A)-02.JPG) 2 Используемые компоненты.3 Сборка и программирование.4 Примечание. В
2 Используемые компоненты.3 Сборка и программирование.4 Примечание. В
Двунаправленный регулятор скорости двигателя постоянного тока. Схема и описание
Изменение скорости двигателя постоянного тока является фундаментальной задачей во многих устройствах, в которых используются двигатели.
В статье представлен несложный, а главное — «не микроконтроллерный» двунаправленный регулятор скорости вращения двигателя постоянного тока с использованием метода ШИМ.
В этом устройстве для установки скорости двигателя используется потенциометр. В крайних положениях двигатель работает на максимальной скорости в заданном направлении. Двигатель останавливается и тормозит, когда потенциометр находится в среднем положении.
Изменение направления вращения выполняется автоматически в зависимости от положения потенциометра. В крайних положениях сигнал ШИМ имеет 100% заполнение, что обеспечивает минимальные потери при максимальной скорости. «Нулевое» положение имеет мертвую зону, что способствует стабильной остановке двигателя./F108M_(10-90V-60A)-03.JPG)
На контроллер можно подавать напряжение в диапазоне 8 … 30 В постоянного тока, что обеспечивает совместимость с типичными двигателями постоянного тока. Максимальная допустимая нагрузка по току составляет 2 А.
Принципиальная схема регулятора скорости вращения двигателя показана на рисунке ниже.
Регулятор состоит из четырех функциональных блоков:
- ШИМ генератор (0 … 100%), управляемый напряжением — интегральная схема LTC6992-1 (DD1).
- Блок обработки управляющего сигнала на микросхеме LM324 (DA1).
- Детектор направления и логическое управление приводом двигателя на микросхеме 74HC00 (DD2).
- Драйвер двигателя с защитой — интегральная микросхема DRV8871 (DD3).
Устройство питается от стабилизатора LM317 (DA2). Схема драйвера двигателя собрана на специализированной интегральной схеме DRV8871 (DD3). Блок-схема данной микросхемы показана на следующем рисунке.
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров./F036M_(6-90V-15A)-04.JPG) ..
..
Микросхема DRV8871 содержит все компоненты, необходимые для реализации управления щеточным электродвигателем постоянного тока:
- два MOSFET полумоста с низким сопротивлением Rdson и систему измерения тока двигателя, для которой не требуются внешние компоненты
- защитную логику
- зарядовый насос для управления силовыми транзисторами,
- встроенную систему защиты от перегрузки
- тепловую защиту
- логику управления входом
Встроенный датчик тока двигателя не требует внешнего измерительного резистора, но по-прежнему можно изменить максимальный ток обмотки путем подключения соответствующего резистора к выводу Ilim, в соответствии с формулой:
Ilim = 64 / R8
В прототипе ток был установлен на уровне 2 А, что соответствует сопротивлению R8 около 33 кОм. Минимальное значение резистора составляет 15 кОм. Резистор следует подобрать в зависимости от используемого двигателя.
Направление вращения двигателя регулируется с использованием входов IN1 / IN2. Логические схемы, построенные с использованием микросхемы DD2 (74HC00), меняют способ управления на стандарт PWM/DIR. Двухцветный светодиод LED1 указывает на направление вращения и индикацию заполнения ШИМ.
Компаратор на операционном усилителе DA1.1 сравнивает напряжение с ползунка потенциометра ШИМ с опорным напряжением REF = 2,5 В, генерируя внутренний сигнал DIR, определяющий направление вращения двигателя.
Опорное напряжение является производным от напряжения питания 5 В (стабилизированный DA2) через резистивный делитель R23 / R24 и буферизуется через DA1.2.
Когда заполнение сигнала ШИМ равно 0%, двигатель останавливается, т. е. замыкается встроенными ключами к массе. Сигнал ШИМ генерируется микросхемой LTC6992-1 (DD1), блок-схема которой показана на следующем рисунке.
Данная микросхема содержит все блоки, необходимые для реализации генератора ШИМ с фиксированной частотой и регулируемым рабочим циклом. Опорная частота встроенного генератора устанавливается резистором, подключенным к входу SET (R1). Дополнительное деление частоты устанавливает делитель, подключенный к выводу DIV (R2 / R3).
Изменение напряжения на клемме MOD в диапазоне 0 … 1 В изменяет рабочий цикл в пределах 0 … 100%. В прототипе частота генератора была установлена на уровне около 128 кГц, а степень деления на уровне 256, что дает тактовую частоту 500 Гц.
Управляющий сигнал генератора ШИМ вырабатывается с помощью двух дифференциальных усилителей DA1.3 / DA1.4, которые отвечают за преобразование напряжения 0 … 5 В от ползунка потенциометра ШИМ в управляющее напряжение MOD U1 в диапазоне 0 … 1 В.
Усилитель DA1.3 работает для напряжения ползунка потенциометра в диапазоне 2,5…5 В, масштабируя до диапазона 0 … 1,7 В, а DA1.4 соответственно — 0…2,5 В масштабируя до 1,7 … 0 В.
Диоды VD2 и VD3 складывают напряжение усилителей DA1.3 / DA1.4 и вводят вместе с резисторами R15, R20 небольшую мертвую зону в среднем положении потенциометра. Диоды VD4 и VD5 защищают вход MOD DD1 от превышения допустимого диапазона напряжения. Кривые напряжения в системе управления показаны на рисунке ниже.
Напряжение питания 5 В подается стабилизатором DA2 типа LM317 в своем типовом применении. Питание на регулятор подается через разъем PWR напряжением 8 … 30 В с мощностью, соответствующей используемому двигателю. Двигатель подключен к разъему DCM.
В зависимости от требуемой точности регулировки вместо обычного 9-миллиметрового потенциометра (ШИМ) можно припаять SIP-разъем и использовать внешний многооборотный потенциометр с сопротивлением 1 кОм.
Микросхему DD3 необходимо снабдить небольшим радиатором для корпуса SO8 для облегчения рассеивания тепла. Модуль, собранный из исправных компонентов, не требует наладки, но стоит проверить управляющие напряжения CTRL, DIR, PWM в зависимости от положения потенциометра.
ZK-MG, ШИМ регулятор оборотов двигателя постоянного тока в корпусе
Описание ZK-MG, ШИМ регулятор оборотов двигателя постоянного тока в корпусе
ШИМ контроллер двигателя ZK-MG в корпусе. Регулирует скорость мотора, индицирует на цифровой дисплей мощность в процентах, отличается возможность програмнно изменять частоту работы ШИМ.
1. Основные характеристики продукта:
1,1 оснащен контактами старт-стоп, и может быть подключен к внешним переключателем управления, чтобы удовлетворить различные требования к контролю вращения.
1,2 функция мягкого пуска двигателя. При запуске двигателя ток медленно увеличивается, и нет тока удара, который может эффективно защитить двигатель и продлить срок его службы
1,3 Рабочий цикл, верхний и нижний предел рабочего цикла и рабочая частота могут быть установлены для облегчения работы клиентов и использования их двигателей в соответствии с их рабочими характеристиками.
1,3 ручка цифрового кодировщика регулирует скорость двигателя, которая является более точной и последовательной, чем обычный потенциометр.
1,4 со стандартным корпусом 5135, удобным для установки клиентом.
2. Технические параметры: Модель: ZK-MG
2,1 Рабочее напряжение: 5 в пост. Тока ~ 30 В, защита от обратного подключения
2,2 Номинальный ток: при 30в= 5A максимальный ток 15A при 5 в.
2,3 Максимальная мощность: 150 Вт
2,2 Рабочая частота: 1 кГц ~ 99 кГц регулируемая, 1 кГц шаг, частота по умолчанию 20 кГц, точность около 1%
2,3 Рабочий цикл: 0-100%, 1% шаг
2,4 размер изделия: 79 мм * 43 мм * 26 мм
2,5 Вес изделия: 41 г
2,6 упаковка: картонная упаковка
3. Инструкции по эксплуатации:
3,2 управление цифровой ручкой кодировщика
В интерфейсе по умолчанию: (рабочий цикл отображается по умолчанию)
Короткое нажатие-переключатель запуска и остановки двигателя
Длительное нажатие-для входа в интерфейс настройки
Вращение против часовой стрелки-коэффициент нагрузки уменьшается
Вращение по часовой стрелке-увеличенный рабочий цикл
Под настройкой экрана:
Короткое нажатие-Выберите параметры настройки и переключитесь между нижним пределом рабочего цикла, верхним пределом рабочего цикла и рабочей частотой. Форма отображения нижнего предела рабочего цикла-«L» + две цифры, форма отображения верхнего предела рабочего цикла-«H» + две цифры или «100», И форма отображения рабочей частоты-«F» + две цифры.
Длительное нажатие-выход из интерфейса настройки
Вращение против часовой стрелки-соответствующие настройки уменьшены
Вращение по часовой стрелке-параметры настройки увеличиваются соответственно
3,3 задний стоп-порт
Клавиша переключения или уровень 3,3 В могут быть внешне подключены. Переключайте состояние запуска/остановки двигателя при закрытии ключа или снижении уровня 3,3 В.
Комплект поставки: контроллер двигателя постоянного тока
ШИМ регулятор оборотов двигателя 12-40В, 10А
ШИМ регулятор оборотов коллекторного двигателя постоянного тока DC 12-40В 10А 13КГц.
ШИМ-контроллер мощности имеет самое широкую область применения. Это регулятор хода двигателей, диммер для светодиодов и светодиодных лент.
Регулятор скорости двигателя постоянного тока 10A предназначен для регулирования мощности низковольтных (+12…40 В) нагрузок постоянного тока (электродвигатели, лампы накаливания и т.п.). Благодаря использованию в схеме управления метода ШИМ (широтно-импульсная модуляция), подключенные к устройству электродвигатели могут устойчиво работать даже на малых оборотах. Усиленный радиатор охлаждения и распределенная нагрузка на транзисторы гарантируют его надежную работу в изделиях с непрерывным управлением. К ним относятся регуляторы скорости вращения двигателя постоянного тока, регуляторы освещения с лампой накаливания, а также в других схемах управления током.
На плате регулятора есть предохранитель, рассчитанный до 10А силы тока, используется для предотвращения подачи на плату аварийного тока больше 10А. Управление скоростью двигателя осуществляется с помощью регулировочного резистора на 10 кОм с ручкой.
- Используется для точной регулировки скорости.
- Высокая эффективность, высокий крутящий момент, низкий нагрев.
- С защитой от обратной полярности, с высокой защитой по току.
- Предназначен для управления нагрузкой до 10А.
- Диапазон управления скоростью двигателя от 10 до 100%.
- На плате установлен электролитический конденсатор 1000 мкФ 50 В.
- Управление производится с помощью мощного полевого транзистора IRF3205.
Характеристики
Напряжение питания: 12 – 40 В постоянного тока
Номинальный ток: 8 А
Максимальный ток: 10 А
ШИМ рабочий цикл: 10% – 100%
Частота ШИМ: 13 кГц
Размеры: 60 х 55 х 28 мм
Регулирует мощность: 12В*8А = 96Вт, 24В*8А = 192Вт, 40В*8А = 320Вт
Схема подключения:
На плате регулятора имеется 4 винтовых клеммы для подключения двигателя и питания. На задней стороне платы есть обозначения клемм.
Клеммы Power + и Power- подключаем к источнику питания соответственно + и — (например, к аккумулятору)
Клеммы Motor+ и Motor- подключаем к электродвигателю постоянного тока в соответствующей полярности (при смене полярности, двигатель будет вращаться в другую сторону).
коллекторный и асинхронный двигатели и варианты регулировки
Практически во всех бытовых приборах и электроинструментах используется коллекторныйдвигатель. В более новых моделях болгарок, шуруповертов, ручных фрезеров, пылесосов, миксеров и других присутствует регулировка оборотов двигателя, но в более поздних моделях такой функции нет. Такими инструментами и бытовыми приборами не всегда удобно работать, и поэтому существуют регуляторы оборотов с поддержанием мощности.
Виды двигателей и принцип работы
Двигатели делятся на три типа: коллекторный, асинхронный и бесколлекторный. В большинстве электроинструментов стоит первый тип. Этот электродвигатель имеет довольно компактный размер. Его мощность значительно выше, чем у асинхронного, а цена довольно низкая. Что касается асинхронных, то этот тип в основном используется в металлообрабатывающей отрасли, а также широкое распространение они получили в угледобывающих шахтах. Довольно редко их можно встретить в быту.
Бесколлекторный электродвигатель используется там, где нужны большие обороты, точное позиционирование и малые размеры. Например, в различной медицинской технике, авиамоделировании. Принцип работы довольно прост. Если рамку прямоугольной формы, которая имеет ось вращения, поместить между плюсами постоянного магнита, то она начнет вращаться. Направление зависит от направления тока в рамке. В составе этого типа присутствуют якорь и статор. Якорь вращается, а статор стоит неподвижно. Как правило, на якоре стоит не одна рамка, а 4,5 или более.
Асинхронный двигатель работает по другому принципу. Благодаря эффекту переменного магнитного поля в статорных катушках он приводится во вращение. Если углубиться в курс физики, то можно вспомнить, что вокруг проводника, через который проходит ток, создается своеобразное магнитное поле, заставляющее вращаться ротор.
Принцип работы бесколлекторного типа основан на включении обмоток так, чтобы магнитные поля статора и ротора были ортогональны друг другу, а вращающий момент регулируется специальным драйвером.
На рисунке отчетливо видно, что для перемещения ротора нужно выполнить необходимую коммутацию, но и регулировать обороты не представляется возможным. Тем не менее бесколлекторный двигатель может очень быстро набирать обороты.
Устройство коллекторного двигателя
Коллекторный электродвигатель состоит из статора и ротора. Ротором называется часть, которая
вращается, а статор является неподвижным. Еще одной составляющей электродвигателя являются графитовые щетки, по которым ток течет к якорю. В зависимости от комплектации могут присутствовать датчики Холла, которые дают возможность плавного запуска и регулировки оборотов. Чем выше подаваемое напряжение, тем выше обороты. Этот тип может работать как от переменного, так и от постоянного тока.
По классификации коллекторные двигатели можно разделить на те, что работают от переменного и от постоянного тока. Их также можно разделить по типу возбуждения обмотки: двигатели с параллельным, последовательным и смешанным (параллельно-последовательным) возбуждением.
Типы регулировки
Существует довольно много вариантов регулировки оборотов. Вот основные из них:
- Блок питания с регулировкой выходного напряжения.
- Заводские устройства регулировки, которые идут изначально с электромотором.
- Регуляторы на кнопочном управлении и стандартные регуляторы, которые просто ограничивают напряжение.
Эти типы регулировки плохи тем, что с уменьшением или увеличением напряжения падает и мощность. В некоторых электроинструментах это допустимо, но, как показывает практика, в большинстве случаев это является неприемлемым из-за сильного падения мощности и, соответственно, КПД.
Наиболее приемлемым вариантом будет регулятор на основе симистора или тиристора. Мало того что такой регулятор не уменьшает мощность при уменьшении напряжения, он еще и позволяет осуществлять более плавный пуск и регулировку оборотов. К тому же такую схему можно сделать своими руками. Ниже изображен регулятор оборотов с поддержанием мощности. Схема собрана на базе симистора BTA 41 800 В.
Все номиналы электроэлементов обозначены на схеме. Это схема после сборки, работает довольно стабильно и обеспечивает плавную регулировку коллекторного двигателя. При уменьшении выходного напряжения мощность не уменьшается, что является весомым плюсом.
При желании можно собрать регулятор оборотов коллекторного двигателя 220 В своими руками. Эта схема собрана на базе симистора ВТА26−600, который предварительно необходимо установить на радиатор, так как при нагрузке этот элемент довольно сильно греется.
К готовой схеме возможно подключить электромотор, мощность которого не превышает 4 кВт.
Схема выглядит следующим образом.
Она успешно справится с регулировкой таких электроинструментов, как дрель, болгарка, циркулярка, лобзик. При желании можно использовать схему в качестве регулятора мощности ТЭН-ов, обогревателей и в качестве диммера. К минусам можно отнести невозможность регулировки мощности приборов, которые питаются от постоянного тока.
Регуляторы мощности постоянного тока
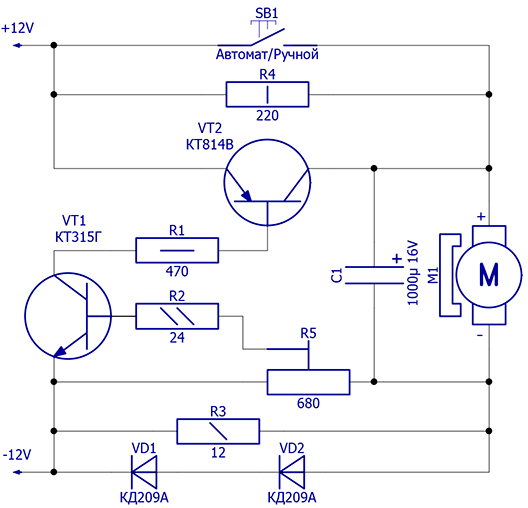
Иногда возникает потребность в регулировке оборотов коллекторного двигателя постоянного тока.
Если потребитель не имеет большой мощности, то возможно последовательно подсоединить переменный резистор, но тогда КПД такого регулятора резко упадет. Существуют схемы, при помощи которых возможно довольно плавно регулировать обороты, не уменьшая КПД. Такой регулятор подойдет для изменения яркости различных ламп, напряжения питания, не превышающего 12 В. Эта схема также выполняет роль стабилизатора частоты вращения, при изменении механической нагрузки на вал обороты остаются неизменными.
Эта схема регулятора оборотов двигателя постоянного тока 12 В вполне подойдет для регулировки и стабилизации оборотов двигателей с током, не превышающим 5 А. В эту схему входит драйвер на биполярных транзисторах и таймер 7555, что обеспечивает стабильную работу и плавную скорость регулировки. Цена на детали довольно низкая, а это является несомненным плюсом. Можно также собрать регулятор оборотов электродвигателя 12 В своими руками.
Асинхронный двигатель и регулятор оборотов
Как правило, этот тип применяется на различных производствах, начиная от шахт и заканчивая металлообрабатывающими отраслями. Например, в угольных шахтах для плавного пуска конвейерных лент используется пускатель АПМ, в который встроено устройство на тиристорах, позволяющее плавно запустить конвейер. Асинхронный однофазный двигатель применяется также в автомобилях, вентиляторах печек, двигателях, которые приводят в движение дворники, бытовых вентиляторах, питающихся от напряжения 220 В. В машине двигатели работают от постоянного напряжения 12 вольт, но плавный запуск в них не предусмотрен.
Для регулировки оборотов асинхронного двигателя применяются так называемые частотные преобразователи. Эти преобразователи позволяют кардинально менять форму и частоту сигнала. Как правило, такие преобразователи собраны на базе мощных полупроводниковых транзисторов и импульсных модуляторов, а всеми элементами управляет ШИМ-контроллер.
Следует помнить: чем плавней разгон двигателя, тем меньше он испытывает перегрузок. Это касается редукторов, конвейеров, мощных насосов, лифтов. Вот одна схема регулятора оборотов асинхронного двигателя 220 В.
С помощью этой схемы можно регулировать обороты двигателей, мощность которых не превышает 1 тыс. Вт. При сборке этой схемы есть нюансы, которые необходимо учесть:
- Тип соединения «треугольник».
- Необходим драйвер трехфазного моста IR2133.
- Микроконтроллер AT90SPWM3B.
- Для прошивки микроконтроллера необходим программатор.
- Мощные транзисторы IRG4BC30W или их аналоги.
- ЖК-дисплей в качестве индикатора.
- Импульсный блок питания, который можно купить или собрать собственноручно.
Из-за значительного нагрева диодный мост и силовые транзисторы необходимо установить на радиатор. Если предполагается подключение двигателя мощностью до 400 Вт, то термодатчик ставить необязательно, а для управления можно использовать опторазвязку.
Чтобы увеличить срок службы различных видов двигателей, рекомендуется пользоваться регуляторами оборотов, решающими большое количество проблем.
Нужна схему регулятора оборотов — Электроника
…а чем «диммер обыкновенный» отличается от «стабилизатора напряжения обыкновенного» для питания двигателя постоянного тока ? :unknw:
Конечно, в зависимости от типа мотора, возможно дополнительное гудение при работе от диммера, ну дык дроссель в помощь, если гудение напрягает. Зато на сколько проще и дешевле :good:
Много подстроек, судя по всему схема содрана с какого-то промышленного тиристорного привода конца 70 годов прошлого века. А сейчас 21 Век шагает. 🙂
…и что с того ? ..просто — раз, легко повторить — два, универсально — три ..хошь тахо задействуй, нет тахо — стабилизируй по напруге на якоре …ну на крайняк по току — стабилизацией оборотов не назовёшь, но лучше чем просто стабилизированное напряжение питания.
Хорошую схему не нужно настраивать. «правильно собранная схема начинает работать сразу».
И гдеж такие схемы бывают??? :crazy:
Даже промышленные привода в большинстве своём универсальные и требуют кучу настроек как железных так и программных. Ну конечно, встречаються к примеру умные частотники, которые после нажатия кнопочки автоматически обсасывают и подстраиваются под подключенный мотор, и то, как повезёт.
В предложенной мной схеме, автор довольно подробно описывет алгоритм настройки, что уже «пол дела» так сказать. Да и народ там обсуждает схему очь подробно, что тоже является большим плюсом при повторении схемы.
Мне лично она понравилась своей простотой и обезательно повторю(немного конечно кое что модернизирую), потому как поискав\почитав ничё болемене приличного больше не нашёл. Ну есть допустим вариант если прилепить енкодер к мотору и купить какой китайский привод или уж целиком тогда — мотор с приводом 🙂 Аль может есть что придложить приличного ??? ..только вариант:
Изготовить. В сети полно схем самодельных сварочников. Тот же порядок мощности. Слегка пересчитать.
..эт вы для себя оставьте 😆 ..кстать, я конечно не спец по сварочникам, но там вродь как ток в основном стабилизируют ? ..тот же диммер, только со стабилизацией тока ?
Изменено пользователем JurkinРегулятор оборотов минидрели / Хабр
Сверление печатных плат — настоящая головная боль для электронщика, но наше новое устройство поможет ее немного смягчить. Это простое и компактное дополнение к минидрели позволит продлить жизнь двигателю и сверлам. Схема, плата, инструкции по настройке, видео — все в статье!
Для чего нужен регулятор оборотов
Обычно минидрели строятся на базе обычных двигателей постоянного тока. А обороты таких двигателей зависят от нагрузки и приложенного напряжения. В результате на холостых оборотах двигатель раскручивается очень сильно, а в моменты сверления обороты двигателя плавают в большом диапазоне.
Если снижать напряжение на двигателе, когда не нем нет нагрузки, можно добиться увеличения ресурса как свёрл, так и самих двигателей. Кроме того, даже точность сверления повышается. Самый простой способ добиться этого — измерение тока, потребляемого двигателем.
В интернете много схем подобных регуляторов, но большинство из них используют линейные регуляторы напряжения. Они массивные и требуют охлаждения. В соавторстве с TinyElectronicFriends нам захотелось сделать компактную плату на базе импульсного стабилизатора, чтобы она могла быть просто «надета» на двигатель.
Схема
ШИМ-регулятор со встроенным ключом MC34063 регулирует напряжение на двигателе. Напряжение на шунте R7,R9,R11 усиливается операционным усилителем и через компаратор подается на вход обратной связи ШИМ-контроллера.
Если ток меньше определенного значения, то на двигатель подается напряжение, зависящее от настройки сопротивления RV1. То есть на холостых оборотах на двигатель будет подаваться только часть мощности, а подстроечный резистор RV1 позволит отрегулировать обороты при этом.
Если сигнал на выходе ОУ превысит напряжение на компараторе, то на двигатель будет подано полное напряжение питания. То есть при сверлении двигатель будет включаться на максимальную мощность. Порог включения задается резистором RV2.
Для питания ОУ используется линейный стабилизатор.
Все компоненты схемы будут рассеивать очень мало тепла и можно собрать ее полностью на SMD-компонентах. Работать она может при большом диапазоне питающих напряжений (в зависимости от сопротивления R6), не требует контроллеров и датчиков оборотов.
Печатная плата
Вся схема умещается на двухсторонней печатной плате диаметром 30мм. На ней всего несколько штук переходных отверстий и ее легко можно изготовить «в домашних условиях». Ниже в статье будут файлы для скачивания файла печатной платы для SprintLaout.
Перечень компонентов
Вот полный список всего, что потребуется для сборки:
- Печатная плата (ссылка на файлы для изготовления в конце статьи)
- U1 — MC34063AD, импульсный стабилизатор, SOIC-8
- U2 — LM358, операционный усилитель, SOIC-8
- U3 — L78L09, стабилизатор, SOT-89
- D1,D3 — SS14, диод Шоттки, SMA — 2шт
- D2 — LL4148, диод выпрямительный, MiniMELF
- C1 — конденсатор, 10мкФ, 50В, 1210
- C2 — конденсатор, 3.3нФ, 1206
- C3,C4 — конденсатор, 4.7мкФ, 1206 — 2шт
- C5 — конденсатор, 22мкФ, 1206
- R1-R3,R7,R9,R11 — резистор 1 Ом, 1206 — 6шт
- R4,R10 — резистор 22кОм, 1206 — 2шт
- R5 — резистор 1кОм, 1206
- R6 — резистор 10-27кОм, 1206. Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОм
- R8 — резистор 390 Ом, 1206
- RV1,RV2 — резистор подстрочный, 15кОм, типа 3224W-1-153 — 2шт
- XS1 — клемма, 2 конт, шаг 3,81мм
Также мы сделали на 3D-принтере кольцо-ограничитель, для удобной установки на двигатель. Ссылка для скачивания STL-файла для скачивания в конце статьи.
Сборка и настройка
Собирается все достаточно просто. Контактные площадки нарисованы под ручную пайку.
Стоит начинать сборку самой платы с установки всех компонентов на стороне платы без подстроечных резисторов, а затем на обратной стороне. Клемму проще устанавливать в последнюю очередь. Номинал R6 подбирается в соответствии с номинальным напряжением вашего двигателя. В этом устройстве важно контролировать положение ключа на микросхемах и полярность диодов. Все остальные компоненты не полярные.
Между платой и двигателем над установить проставку, чтобы плата не касалась двигателя. Сама плата надевается прямо на ламели двигателя. Несколько раз проверьте полярность подключения двигателя, чтобы он крутился в правую сторону, а затем припаяйте контакты.
Контакты для подачи напряжения, на вход платы подписаны «GND» и «+36V». Минус источника входного напряжения подключается к контакту «GND», а плюс к «+36V». Напряжение источника питания должно совпадать с номинальным напряжением двигателя.
Настройка регулятора очень проста:
- Установить резистором RV2 порог срабатывания регулятора на максимум
- Установить резистором RV1 оптимальные обороты двигателя в режиме холостого хода
- Установить резистором RV2 такой порог срабатывания, чтобы при появлении малейшей нагрузки, увеличивалось напряжение на двигателе
Видео
Эффект от использования сложно оценить по видео, но мы теперь всегда сверлим только с регулятором! Требуется лишь немного привыкнуть и следить чтобы сверла были хорошо заточены. И, конечно, его можно в любой момент просто включить на максимум на всегда.
Ссылки
Ссылки для скачивания всех необходимых файлов вы можете найти на
основной странице проекта.
Спасибо за проявленный интерес!
Матовые контроллеры двигателей постоянного тока — RobotShop
Адаптер у меня на выходе 24В и 1А. Он подойдет к гнезду для монтажа на панель, которое я планирую использовать. Идеально! Это должно сработать. Хорошо, мне действительно не нужен этот контроллер для использования этого двигателя? Нет, у мотора уже есть собственный контроллер. Я знаю, что вы ранее предлагали двигатель без …
Подробнее (9 ответов)
Привет @ steve12 и добро пожаловать в сообщество RobotShop. Может быть, вам подойдет этот вариант: https: // www.robotshop.com/en/42d-brushless-dc-planetary-gear-motor-24v-570rpm.html robotshop.com https://www.robotshop.com/en/42d-brushless-dc-planetary-gear-motor- 24v-570rpm.html Бесщеточный планетарный редуктор постоянного тока 42D …
Подробнее (2 ответа)
Привет, я ищу бесщеточный двигатель (BLDC), который может работать при 200 об / мин, 24 В (было бы лучше, но я могу работать с другим напряжением), управляемый с помощью ШИМ с крутящим моментом 1,5 кг- см и номинальный крутящий момент 0,5 кг-см.Вы знаете, где я могу его найти, или можете предложить мне мотор. Этот очень закрытый …
Подробнее (2 ответа)
Привет, @Neurokid, и добро пожаловать в сообщество RobotShop! Поскольку шаговые двигатели движутся дискретными шагами, они могут показаться «рывками» на низких скоростях. Однако одним из способов уменьшения рывков является установка микрошага на меньшие доли шага (с использованием драйвера микрошага).Я говорю об этом …
Подробнее (7 ответов)
https://www.robotshop.com/eu/en/cytron-single-10-45v-40a-brasted-dc-motor-controller.html robotshop.com https://www.robotshop.com/eu/ ru / cytron-single-10-45v-40a-brasted-dc-motor-controller.html Cytron Single 10-45V, 40A Brushed DC Motor Controller Двунаправленное управление для одиночного щеточного контроллера постоянного тока …
Подробнее (2 ответа)
Привет всем, я ищу щеточный контроллер двигателя постоянного тока, который может обрабатывать аналоговый входной сигнал +/- 10 В для управления скоростью.Maxon производит контроллер, но его нет в наличии как минимум 12 недель. Кто-нибудь знает альтернативу? Требуется очень низкий ток, 2А будет достаточно. Спасибо!
Подробнее (2 ответа)
Контроллеры электродвигателей постоянного тока, потенциометр электродвигателя, контроллер постоянного тока 12 В
Несмотря на то, что электродвигатели являются одной из самых старых конструкций электродвигателей, электродвигатели постоянного тока по-прежнему актуальны и регулярно используются в современной промышленности. Их управляемость является залогом их долговечности — даже самая простая машина может преобразовать постоянный ток в механическое вращение.
Продолжение производства двигателей постоянного тока привело к производству контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию, но обеспечивают отличную производительность. Если вы ищете программируемый контроллер двигателя для вашего приложения или проекта, вы найдете то, что вам нужно, здесь, в Allied Electronics.
Прочтите, чтобы узнать больше о контроллерах двигателей постоянного тока и их использовании.
Что такое контроллеры двигателей постоянного тока?
Контроллеры двигателей постоянного тока — это устройства, которые могут управлять положением, скоростью или крутящим моментом двигателя постоянного тока.Существует ряд контроллеров, от щеточных и бесщеточных до универсальных, каждый из которых позволяет оператору настраивать желаемое поведение двигателя с помощью своих механизмов.
Кривая крутящего момента двигателя постоянного тока обратно линейна, что означает, что их крутящий момент пропорционально уменьшается с увеличением числа оборотов двигателя. Это упрощает управление ими с помощью программируемого контроллера мотора, так как снижение их скорости увеличивает их крутящий момент, и наоборот.
Для чего используются контроллеры двигателей постоянного тока?
Благодаря функциональности контроллеров двигателей постоянного тока они идеально подходят для ряда приложений.Их часто можно увидеть в солнечных панелях или батареях благодаря их превосходной способности запускать высокий крутящий момент и управлять высокоинерционными нагрузками, их скорость намного легче контролировать по сравнению с двигателями переменного тока.
Если вы хотите изменить направление своего приложения или проекта, вам подойдут двигатели постоянного тока и программируемые контроллеры двигателей. В отличие от двигателей переменного тока, вы можете быстро и легко запускать и останавливать двигатели постоянного тока.
Почему следует выбирать Allied Electronics для контроллеров двигателей постоянного тока?
Allied Electronics предлагает широкий выбор контроллеров двигателей постоянного тока, благодаря чему вы можете сузить область поиска до нужного вам типа.Функция поиска позволяет выполнять фильтрацию по таким характеристикам, как фаза, стиль монтажа, номинальный ток и номинальное напряжение, поэтому вы можете легко использовать это, чтобы найти точное соответствие для работы, над которой вы работаете.
Мы являемся ведущим авторизованным дистрибьютором контроллеров двигателей постоянного тока 12 В и других программируемых контроллеров двигателей в Северной Америке. У нас есть товары ведущих производителей, включая Siemens, Arcus Technology, Carlo Gavazzi и Adafruit Industries. Выбирая Allied Electronics, вы инвестируете в надежный и долговечный продукт.
Если у вас возникнут какие-либо вопросы, наша команда всегда готова помочь, так почему бы не связаться с вами, и мы сможем помочь вам в выборе продуктов. Вы также можете найти совет в нашем центре содержания для экспертов.
Произошла ошибка
Повторите попытку позже или попробуйте нашу домашнюю страницу еще раз.
Bitte versuchen Sie es später oder schauen Sie ob die Homepage funktioniert.
Ошибка: E1020
Австралия Электронная почта
Максон Мотор Австралия Пти Лтд
Unit 1, 12-14 Beaumont Road
Гора Куринг-Гай Новый Южный Уэльс 2080
Австралия
Benelux Электронная почта
maxon motor benelux B.V.
Йосинк Колквег 38
7545 PR Enschede
Нидерланды
Китай Электронная почта
Максон Мотор (Сучжоу) Ко., Лтд
江兴东 路 1128 号 1 号楼 5
215200 江苏
中
Германия Электронная почта
максон мотор gmbh
Truderinger Str. 210
81825 München
Deutschland
Индия Электронная почта
maxon precision motor India Pvt.ООО
Niran Arcade, № 563/564
Новая дорога БЕЛ,
RMV 2-я ступень
Бангалор — 560 094
Индия
Италия Электронная почта
maxon motor italia S.r.l.
Società Unipersonale
Via Sirtori 35,
20017 Rho MI
Италия
Япония Электронная почта
マ ク ソ ン ジ ャ パ ン 株式会社
東京 都 新宿 区 新宿 5-1-15
〒 160-0022
日本
Корея Электронная почта
㈜ 맥슨 모터 코리아
서울시
반포 대로 14 길 27, 한국 137-876
Португалия Электронная почта
maxon motor ibérica s.а
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Швейцария Электронная почта
максон мотор аг
Брюнигштрассе 220
Постфах 263
6072 Sachseln
Schweiz
Испания Электронная почта
maxon motor ibérica s.a. Испания (Барселона)
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Тайвань Электронная почта
maxon motor Тайвань
8F.-8 №16, переулок 609 сек. 5
П. 5, Chongxin Rd.
Sanchong Dist.
Нью-Тайбэй 241
臺灣
Великобритания, Ирландия Электронная почта
максон мотор великобритания, ооо
Maxon House, Hogwood Lane
Finchampstead
Беркшир, RG40 4QW
Соединенное Королевство
США (Восточное побережье) Электронная почта
Прецизионные двигатели maxon, вкл.
125 Девер Драйв
Тонтон, Массачусетс 02780
США
США (Западное побережье) Электронная почта
Прецизионные двигатели maxon, вкл.
1065 East Hillsdale Blvd,
Люкс 210
Фостер-Сити, CA 94404
США
Франция Электронная почта
максон Франция
201 — 715 rue du Chat Botté
ZAC des Malettes
01700 Beynost
Франция
Контроль скорости D.С. Моторс
Соотношение, приведенное ниже, дает скорость двигателя постоянного тока
Приведенное выше уравнение показывает, что скорость зависит от напряжения питания V, сопротивления цепи якоря R a и потока поля Ф, создаваемого током возбуждения. На практике изменение этих трех факторов используется для регулирования скорости. Таким образом, существует три основных метода регулирования скорости двигателей постоянного тока.
- Изменение сопротивления в цепи якоря: этот метод называется регулированием сопротивления якоря или регулированием реостата.
- Изменение потока поля Ф
Этот метод называется контролем потока поля. - Изменение приложенного напряжения.
Этот метод также называется контролем напряжения якоря.
1. Контроль сопротивления якоря (контроль реостата):
Рисунок: (a) Регулировка скорости постоянного тока. Подмешивающий двигатель путем контроля сопротивления якоря.
(b) Регулировка скорости двигателя серии DC посредством контроля сопротивления якоря.
В этом методе в цепь якоря вставлен переменный резистор R e .На рисунке (а) выше показан процесс подключения параллельного двигателя. В этом случае поле напрямую подключается к источнику питания, и поэтому на магнитный поток Ф не влияет изменение R и .
На рисунке (b) показан способ подключения внешнего сопротивления R и в цепи якоря двигателя постоянного тока. В этом случае на ток и, следовательно, на магнитный поток влияет изменение сопротивления цепи якоря.
Падение напряжения в R e снижает напряжение, приложенное к якорю, и, следовательно, скорость уменьшается.
Этот метод имеет следующие недостатки:
- Во внешнем сопротивлении R e тратится большое количество энергии.
- Управление ограничено, чтобы дать скорость ниже нормальной, и увеличение скорости не может быть получено этим методом.
- Для данного значения R e снижение скорости не является постоянным, а зависит от нагрузки двигателя.
Этот метод используется только для небольших двигателей.
2. Изменение потока поля Ф (Управление потоком поля):
Так как ток возбуждения создает магнитный поток, и если мы контролируем ток возбуждения, то можно управлять скоростью.В шунтирующем двигателе скорость можно регулировать, подключив переменный резистор R c последовательно с шунтирующей обмоткой возбуждения. На схеме ниже резистор R c называется шунтирующим регулятором поля .
Рисунок: (a) Регулировка скорости параллельного двигателя постоянного тока путем изменения магнитного потока.
(b) Переключатель, подключенный параллельно к серии электродвигателя постоянного тока.
дает ток возбуждения шунта
Любым из методов можно изменить ток возбуждения серийного двигателя:
- Переменное сопротивление R d подключено параллельно с последовательной обмоткой возбуждения.Параллельно подключенный резистор называется дивертором . Часть основного тока отводится через R d .
- Второй метод использует элемент управления полем с касанием.
Здесь ампер-витки изменяются путем изменения числа витков возбуждения. Такое расположение используется в электрической тяге.
Рисунок: Последовательное поле с резьбой на двигателе постоянного тока
Преимущества полевого управления следующие:
- Это простой и удобный способ.
- Потери мощности в шунтирующем поле мала, потому что ток шунтирующего поля I sh очень мал.
3. Контроль напряжения якоря:
Мы можем контролировать скорость двигателей постоянного тока, изменяя напряжение, подаваемое на якорь. Система управления скоростью Ward-Leonard работает на этом принципе управления напряжением якоря. В этой системе M — это главный двигатель постоянного тока, скорость которого необходимо регулировать, а G — это генератор постоянного тока с отдельным возбуждением. Генератор G приводится в действие трехфазным приводным двигателем, который может быть асинхронным или асинхронным.Комбинация приводного двигателя переменного тока и генератора постоянного тока называется комплектом двигатель-генератор (M-G).
Рисунок: Привод Уорда-Леонарда
Преимущества приводов Ward-Leonard:
- Этот привод имеет плавное регулирование скорости двигателей постоянного тока в широком диапазоне в обоих направлениях.
- Обладает собственной способностью к рекуперативному торможению.
- При использовании перевозбужденного синхронного двигателя в качестве привода для генератора постоянного тока компенсируются запаздывающие реактивные вольт-амперы установки.Таким образом улучшается общий коэффициент мощности установки.
Недостатки классической системы Уорда-Леонарда:
- Его первоначальная стоимость высока из-за использования двух дополнительных машин (набор M-G) того же номинала, что и основной двигатель постоянного тока.
- Имеет большие размеры и вес.
- Требуется большая площадь пола и дорогостоящий фундамент.
- Требуется очень частое техническое обслуживание.
- Потери больше из-за меньшего КПД.
- Его привод производит больше шума.
Pololu — Матовые контроллеры двигателей постоянного тока
В таблице ниже показаны основные характеристики и технические характеристики наших контроллеров двигателей. Вы можете выбрать семейство продуктов из таблицы или прокрутить вниз для получения дополнительной информации.
1 Контроллеры двигателей TReX имеют два двунаправленных канала и один вспомогательный однонаправленный канал.
2 Конкретные диапазоны напряжения и тока см. На страницах отдельных продуктов.
3 Просмотрите страницы отдельных продуктов, чтобы узнать, какие именно контроллеры имеют корпуса.
Сравнить все товары в этой категории
Подкатегории
Простые контроллеры двигателей (SMC) Pololu упрощают базовое управление щеточными двигателями постоянного тока. Наши самые универсальные и настраиваемые контроллеры двигателей, охватывающие широкий диапазон уровней мощности и предлагающие четыре режима интерфейса: USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC).
Контроллеры электродвигателей Jrk — это контроллеры электродвигателей постоянного тока с широкими возможностями настройки, которые можно использовать для управления скоростью без обратной связи или для управления скоростью или положением с обратной связью. Они поддерживают различные режимы интерфейса, включая USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC).
Контроллеры двигателей RoboClaw от Basicmicro (ранее Ion Motion Control) могут управлять одним или двумя щеточными двигателями постоянного тока с использованием последовательного USB, последовательного TTL, RC или аналогового входа.Интегрированные двойные квадратурные декодеры упрощают создание системы управления скоростью с обратной связью, или аналоговая обратная связь может использоваться для управления положением.
Мощные контроллеры двигателей MCP от Basicmicro (ранее Ion Motion Control) могут управлять парой щеточных двигателей постоянного тока с помощью последовательного порта USB, последовательного порта TTL, последовательного порта RS-232, шины CAN, RC или аналоговых входов. Они включают в себя интегрированные двойные квадратурные декодеры и расширенные функции, включая поддержку внутренних сценариев и настраиваемый пользователем ввод / вывод.
Эти контроллеры двигателей позволяют регулировать скорость и направление двух щеточных двигателей постоянного тока с помощью простого последовательного интерфейса, что упрощает добавление двигателей в ваш микроконтроллерный или компьютерный проект.
TReX сочетает в себе RC, аналоговые и последовательные входы для создания мощного решения для управления двигателем. TReX будет работать прямо из коробки в качестве электронного регулятора скорости (ESC), но его способность плавно переключаться между RC / аналоговым и последовательным управлением делает его способным на гораздо большее!
|
|
Управление скоростью двигателя — 4QD
4QD — Управление электродвигателем
Помогаем механикам наладить работу электричества
Мы производим контроллеры скорости двигателя постоянного тока для электродвигателей, которые являются прочными, надежными и простыми в использовании
У нас есть ассортимент контроллеров скорости двигателей постоянного тока и аксессуаров для электродвигателей с батарейным питанием, которые разработаны и изготовлены в Великобритании.
Наша страсть — заставить работать персонал — как промышленные машины, так и любители. Нам нравится помогать механикам наладить работу электрики, и мы можем предоставить решения по управлению скоростью электродвигателя практически для всего, с батареей и электродвигателем постоянного тока, чтобы увидеть, что мы сделали, взгляните здесь или просто просмотрите сайт , все изображения на этом сайте используют наших контроллеров.
- Наша линейка контроллеров двигателей охватывает диапазон от 30 до 360 ампер, от 12 до 84 вольт и может использоваться в широком спектре приложений, в которых используются электродвигатели с постоянными магнитами.
- Наши новые Pro-160 и Pro-360 — единственные контроллеры на рынке с дистанционно устанавливаемым дисплеем, показывающим напряжение, ток и температуру.
- Все наши продукты легко подключаются и регулируются.
- Наши контроллеры надежны, многие по-прежнему остаются сильными после 25 с лишним лет.
- Отправим в любую страну.
- У нас есть ряд дополнительных радиаторов. Если вам нужен мощный ШИМ-контроллер с водяным охлаждением, наши контроллеры являются одними из лучших на рынке.
- У нас есть обширная база знаний с большим количеством технической поддержки, руководств, электрических схем и справочной информации по широкому кругу вопросов управления двигателями, например что такое ШИМ? и как осуществляется переключение H-моста? Если вы предпочитаете видео, то у нас есть выбор по установке, устранению неполадок и общим интересам.
- Мы любим разговаривать с клиентами об их приложениях и хотели бы услышать от вас, есть ли у вас особый проект или идеи для новых продуктов.
- Поможем с проектированием ткацких станков.
- Мы можем разработать продукты и программное обеспечение для управления на заказ.
- Мы полностью контролируем производство и не полагаемся на протяженные линии поставок.
Для просмотра схемы базовой установки щелкните здесь.
