Как работает регулятор оборотов коллекторного двигателя. Какие бывают схемы регуляторов. Для каких целей применяются регуляторы оборотов. Как выбрать или сделать регулятор своими руками.
Принцип работы регулятора оборотов коллекторного двигателя
Регулятор оборотов коллекторного двигателя позволяет плавно изменять скорость вращения вала электромотора. Основной принцип работы регулятора заключается в изменении напряжения, подаваемого на обмотки двигателя.
Существует несколько способов регулирования оборотов коллекторного двигателя:
- Изменение напряжения питания
- Широтно-импульсная модуляция (ШИМ)
- Фазовое регулирование для двигателей переменного тока
Наиболее распространенным методом является широтно-импульсная модуляция. При этом способе на двигатель подаются короткие импульсы напряжения с разной длительностью. Чем длиннее импульс, тем выше обороты двигателя.
Основные схемы регуляторов оборотов
Для коллекторных двигателей применяются следующие схемы регуляторов оборотов:

- На основе симистора или тиристора
- Транзисторные ШИМ-регуляторы
- На специализированных микросхемах
- С обратной связью по скорости
Простейшая схема на симисторе позволяет плавно регулировать обороты, но не обеспечивает их стабилизацию при изменении нагрузки. Более сложные схемы с обратной связью поддерживают заданную скорость вращения независимо от нагрузки на валу двигателя.
Применение регуляторов оборотов коллекторных двигателей
Регуляторы оборотов коллекторных двигателей широко применяются в различных сферах:
- Электроинструмент (дрели, шлифмашинки, лобзики)
- Бытовая техника (пылесосы, миксеры, блендеры)
- Вентиляционное оборудование
- Насосы и компрессоры
- Станки и промышленное оборудование
Использование регулятора позволяет подобрать оптимальную скорость работы оборудования и экономить электроэнергию при работе на пониженных оборотах.
Как выбрать регулятор оборотов
При выборе регулятора оборотов коллекторного двигателя необходимо учитывать следующие параметры:
- Мощность двигателя
- Напряжение питания
- Необходимый диапазон регулирования
- Требуется ли стабилизация оборотов
- Условия эксплуатации (температура, влажность)
Для бытовой техники и электроинструмента подойдут простые симисторные регуляторы. В промышленном оборудовании чаще используются микропроцессорные устройства с обратной связью.
Изготовление регулятора своими руками
Простейший регулятор оборотов коллекторного двигателя можно изготовить самостоятельно. Для этого потребуются следующие компоненты:
- Симистор или мощный транзистор
- Потенциометр
- Конденсаторы и резисторы
- Диодный мост (для работы от переменного тока)
Схему регулятора можно собрать на макетной плате или изготовить печатную плату. При работе с сетевым напряжением необходимо соблюдать правила электробезопасности.
Преимущества использования регуляторов оборотов
Применение регуляторов оборотов для коллекторных двигателей дает следующие преимущества:
- Плавное изменение скорости вращения
- Снижение пусковых токов и нагрузок на механизмы
- Экономия электроэнергии при работе на пониженных оборотах
- Увеличение срока службы двигателя и механизмов
- Расширение функциональности оборудования
Благодаря этим преимуществам регуляторы оборотов широко применяются как в бытовой технике, так и в промышленном оборудовании.
Особенности регулирования оборотов коллекторных двигателей постоянного тока
Коллекторные двигатели постоянного тока имеют ряд особенностей при регулировании оборотов:
- Скорость вращения пропорциональна напряжению питания
- Момент на валу пропорционален току якоря
- Возможно регулирование в широком диапазоне (до 1:100)
- Высокий КПД при работе на пониженных оборотах
Для двигателей постоянного тока применяются ШИМ-регуляторы на транзисторах или специализированных микросхемах. Такие схемы позволяют плавно изменять обороты и поддерживать их при изменении нагрузки.
Регулирование оборотов коллекторных двигателей переменного тока
Коллекторные двигатели переменного тока (универсальные) также допускают регулирование скорости вращения. Для этого применяются следующие методы:
- Фазовое регулирование с помощью симисторов или тиристоров
- Выпрямление напряжения и ШИМ-регулирование
- Частотное регулирование
Наиболее простым и распространенным является фазовое регулирование с помощью симисторов. Такие схемы широко применяются в бытовой технике и электроинструменте.
Схема регулятора оборотов коллекторного двигателя 220В
Схема регулятора оборотов коллекторного двигателя 220в бывает двух типов стандартная и модифицированная. Все зависит непосредственно от регулятора, который вы используете.
Зачем они нужны
Множество бытовых приборов и электроинструментов не обходятся без коллекторного электродвигателя. Такая популярность подобного электродвигателя обусловлена универсальностью.
Для коллекторного электродвигателя может использование питание от тока постоянного или переменного напряжения. Дополнительным преимуществом является эффективный пусковой момент. При этом работа от постоянного или переменного тока электродвигателя сопровождается высокой частотой оборотом, что подходит далеко не всем пользователям. Чтобы обеспечить более плавный пуск и иметь возможность настраивать частоту вращения, используется регулятор оборотов. Простой регулятор вполне можно изготовить своими руками.
Но прежде чем будет обсуждаться схема, сначала нужно разобраться в коллекторных двигателях.
Коллекторные электродвигатели
Конструкция любого коллекторного двигателя включает несколько основных элементов:
- Коллектор,
- Щетки,
- Ротор,
- Статор.
Работа стандартного коллекторного электродвигателя основана на следующих принципах.
- Осуществляется подача тока от источника напряжения 220в. Именно 220 Вольт является стандартным напряжением бытовой сети. Для большинства приборов с электромоторами более 220 Вольт не требуется. Причем подача тока идет на ротор и статор, которые соединяются один с другим.
- В результате подачи тока от источника 220в образуется поле магнитное.
- Под воздействием магнитного напряжения начинается вращение ротора.
- Щетки осуществляют передачу напряжения непосредственно на ротор устройства. Причем щетки обычно изготавливают на основе графита.
- Когда направление тока в роторе или статоре меняется, вал вращается в обратную сторону.
Кроме стандартных коллекторных электродвигателей, существуют другие агрегаты:
- Электромотор последовательного возбуждения. Их устойчивость к перегрузкам более внушительная. Часто встречаются в бытовых электроприборах,
- Устройства параллельного возбуждения. У них сопротивление не отличается большими показателями, количество витков существенно больше, чем у аналогов,
- Однофазный электромотор. Его очень легко изготовить своими руками, мощность на приличном уровне, а вот коэффициент полезного действия оставляет желать лучшего.
Регуляторы оборотов
Теперь возвращаемся к теме регулятора оборотов. Все доступные сегодня схемы можно разделить на две большие категории:
- Стандартная схема регулятора оборотов,
- Модифицированные устройства контроля оборотов.
Разберемся в особенностях схем подробнее.
Стандартные схемы
Стандартная схема регулятора коллекторного электромотора имеет несколько особенностей:
- Изготовить динистор не составит труда.
 Это важное преимущество устройства,
Это важное преимущество устройства, - Регулятор отличается высокой степенью надежности, что положительно сказывается в течение его периода эксплуатации,
- Позволяет комфортно для пользователя менять обороты двигателя,
- Большинство моделей основаны на тиристорном регуляторе.
Если вас интересует принцип работы, то такая схема выглядит довольно просто.
- Заряд тока от источника 220 Вольт идет к конденсатору.
- Далее идет напряжение пробоя динистора через переменный резистор.
- После этого происходит непосредственно сам пробой.
- Симистор открывается. Этот элемент несет ответственность за нагрузку.
- Чем выше окажется напряжение, чем чаще будет происходить открытие симистора.
- За счет подобного принципа работы происходит регулировка оборотов электродвигателя.
- Наибольшая доля подобных схем регулировки электродвигателя приходится на импортные бытовые пылесосы.
- Но при использовании стандартной схемы регулятора оборотов важно понимать, что он обратной связью не обладает. И если с нагрузкой произойдут изменения, обороты электродвигателя придется настраивать.
Модифицированная схема
Прогресс не стоит на месте. Несмотря на удовлетворительные характеристики стандартной схемы регулятора оборотов двигателя, усовершенствования никому еще не навредили.
Наиболее часто применяемыми схемами являются две:
- Реостатная. Из названия становится очевидно, что здесь основой выступает реостатная схема. Такие регуляторы высокоэффективные при смене количества оборотов электродвигателя. Высокие показатели эффективности объясняются использованием силовых транзисторов, отбирающих часть напряжения. Так меньшее количество тока из источника 220 Вольт поступает на двигатель, ему не приходится работать с большой нагрузкой. При этом схема имеет определенный недостаток большое количество выделяемого тепла. Чтобы регулятор работал длительное время, для электроинструмента потребуется активное постоянное охлаждение,
- Интегральная.
 Для работы интегрального устройства регулирования используется интегральный таймер, который отвечает за нагрузку на электродвигатель. Здесь могут быть задействованы всевозможные транзисторы. Это обусловлено наличием микросхемы в конструкции с большими параметрами выходного тока. При нагрузке менее 0,1 Ампер, все напряжение идет непосредственно на микросхему, обходя транзисторы. Чтобы регулятор работал эффективно, на затворе требуется наличие напряжения в 12 Вольт. Из этого вытекает, что электрическая цепь и напряжение питания обязаны отвечать данному диапазону.
Для работы интегрального устройства регулирования используется интегральный таймер, который отвечает за нагрузку на электродвигатель. Здесь могут быть задействованы всевозможные транзисторы. Это обусловлено наличием микросхемы в конструкции с большими параметрами выходного тока. При нагрузке менее 0,1 Ампер, все напряжение идет непосредственно на микросхему, обходя транзисторы. Чтобы регулятор работал эффективно, на затворе требуется наличие напряжения в 12 Вольт. Из этого вытекает, что электрическая цепь и напряжение питания обязаны отвечать данному диапазону.
Простой самодельный регулятор
Если вы не хотите покупать готовый регулятор оборотов для двигателя, его вполне можно попробовать изготовить своими руками для контроля мощности устройства.
Это дополнительные навыки для вас и определенная экономия средств для кошелька.
Для изготовления регулятора вам потребуется:
- Набор проводков,
- Паяльник,
- Схема,
- Конденсаторы,
- Резисторы,
- Тиристор.
Монтажная схема будет выглядеть следующим образом.
Согласно представленной схеме, регулятор мощности и оборотов будет контролировать 1 полупериод. Расшифровывается она следующим образом.
- Питание от стандартной сети 220в поступает на конденсатор. 220 Вольт стандартный показатель бытовых розеток.
- Конденсатор, получив заряд, вступает в работу.
- Нагрузка переходит к нижнему кабелю и резисторам.
- Положительный контакт конденсатора соединяется с электродом тиристора.
- Идет один достаточный заряд напряжения.
- Второй полупроводник при этом открывается.
- Тиристор через себя пропускает полученную от конденсатора нагрузку.
- Происходит разряжение конденсатора, и полупериод вновь повторяется.
При большой мощности электродвигателя, питающегося от постоянного или переменного тока, регулятор дает возможность применять агрегат более экономично.
Самодельные регуляторы оборотов имеют полное право на свое существование. Но когда речь заходит о необходимости использовать регулятор электродвигателя для более серьезного оборудования, рекомендуется купить готовое устройство. Пусть оно обойдется дороже, но вы будете уверены в работоспособности и надежности агрегата.
Но когда речь заходит о необходимости использовать регулятор электродвигателя для более серьезного оборудования, рекомендуется купить готовое устройство. Пусть оно обойдется дороже, но вы будете уверены в работоспособности и надежности агрегата.
Как уменьшить, увеличить обороты электродвигателя 220 и 12В?
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор – регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
Способы изменения вращения зависят от модели электрической машины. Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно.
Простейший вариант
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания.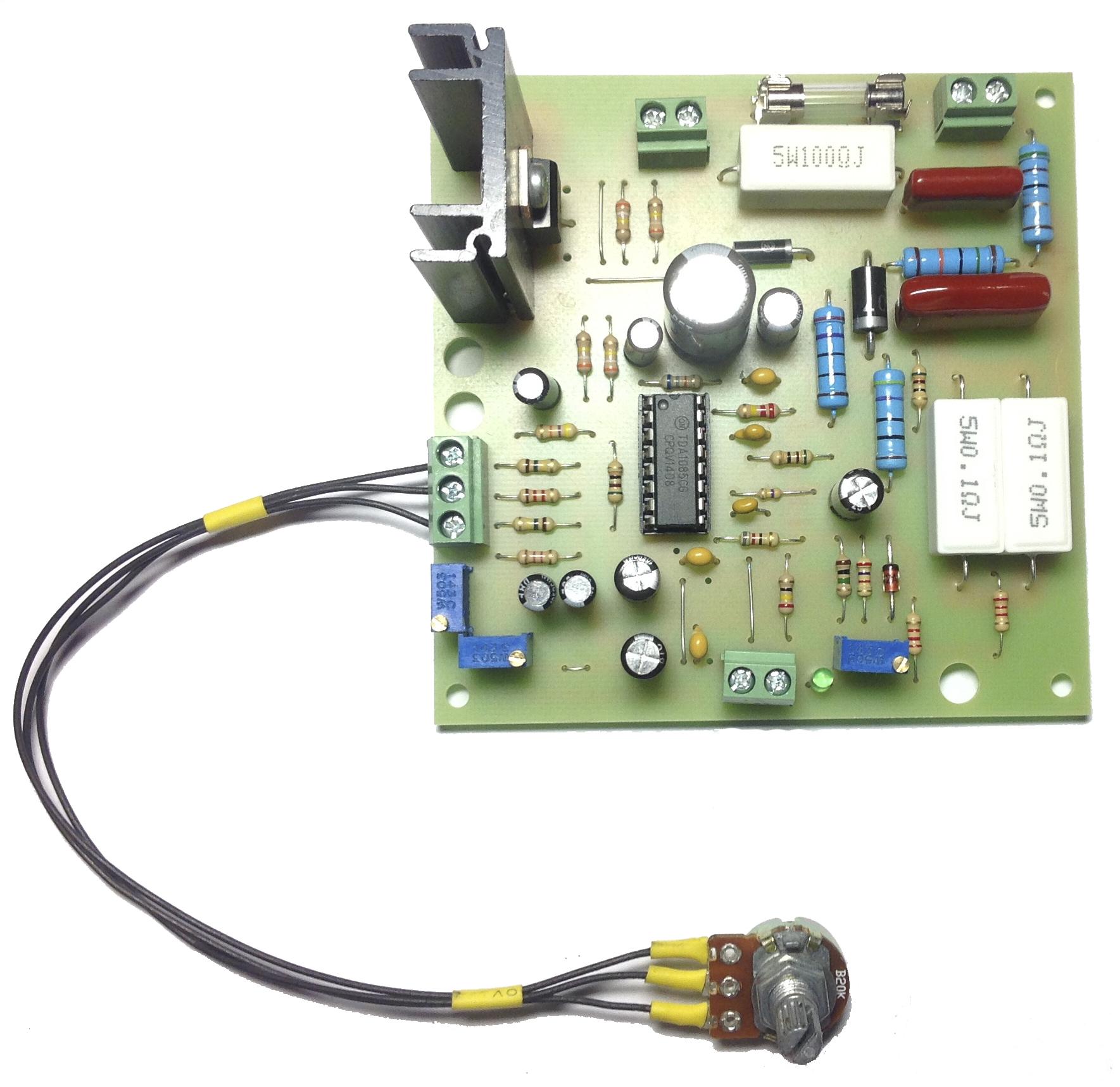 Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность – введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов. Это происходит ввиду насыщения обмотки.
Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
Лучше всего, когда работа при таком включении буде периодической.
В цепи якоря
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убрать крутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
Как результат – можно убрать крутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
Есть еще один вариант, только это уже не для 12, а для 24в питания.
Двигатель постоянного тока, питание – переменное, так как стоит диодный мост. При желании можно мост выбросить и запитывать постоянкой от своего блока питания.
От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения.
Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
Двухфазный двигатель
Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Есть две возможности контролирования числа оборотов:
- Менять амплитуду напряжения питания (Uy),
- Фазное – меняем емкость конденсатора.
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате.
 А лучше превышать для безопасной работы системы.
А лучше превышать для безопасной работы системы. - Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключах
Тиристорные регуляторы мощности являются одними из самых распространенных, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
Схема стабилизатора постоянного тока
Зарядное устройство 24 вольт на тиристоре
Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналов
Сигналы, поступающие на вход системы, образуют обратную связь.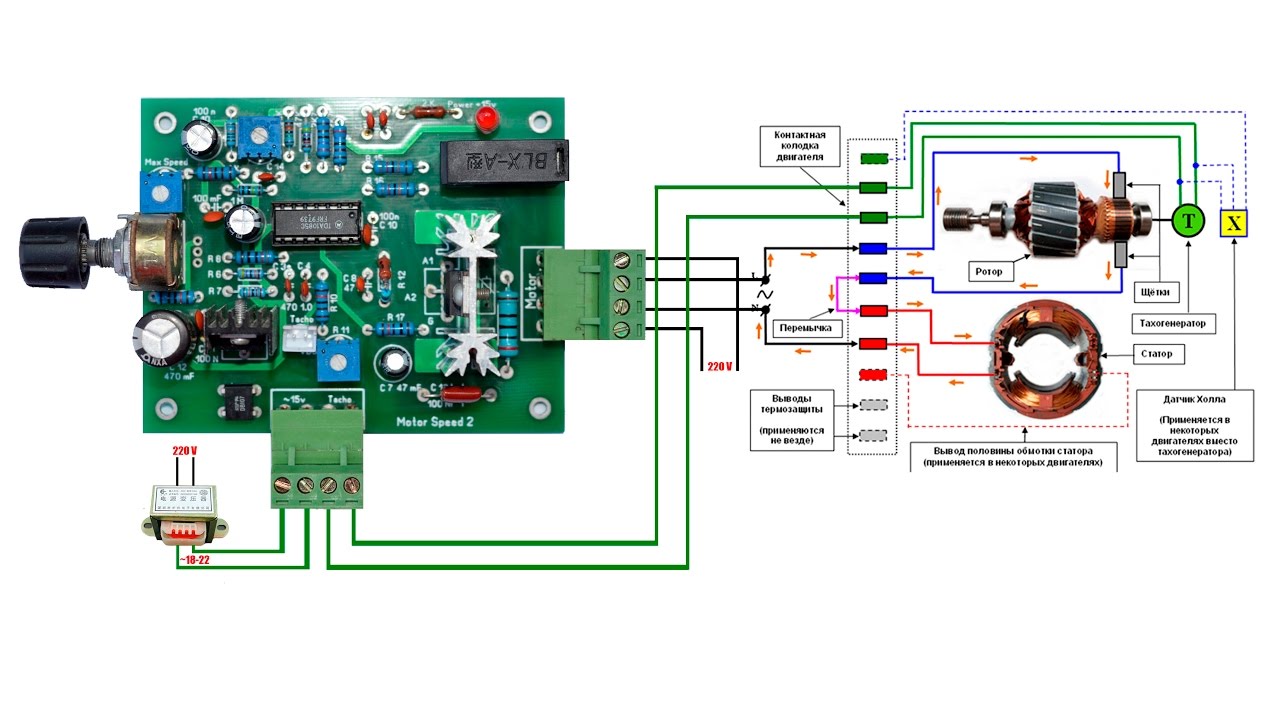 Подробнее рассмотрим с помощью микросхемы.
Подробнее рассмотрим с помощью микросхемы.
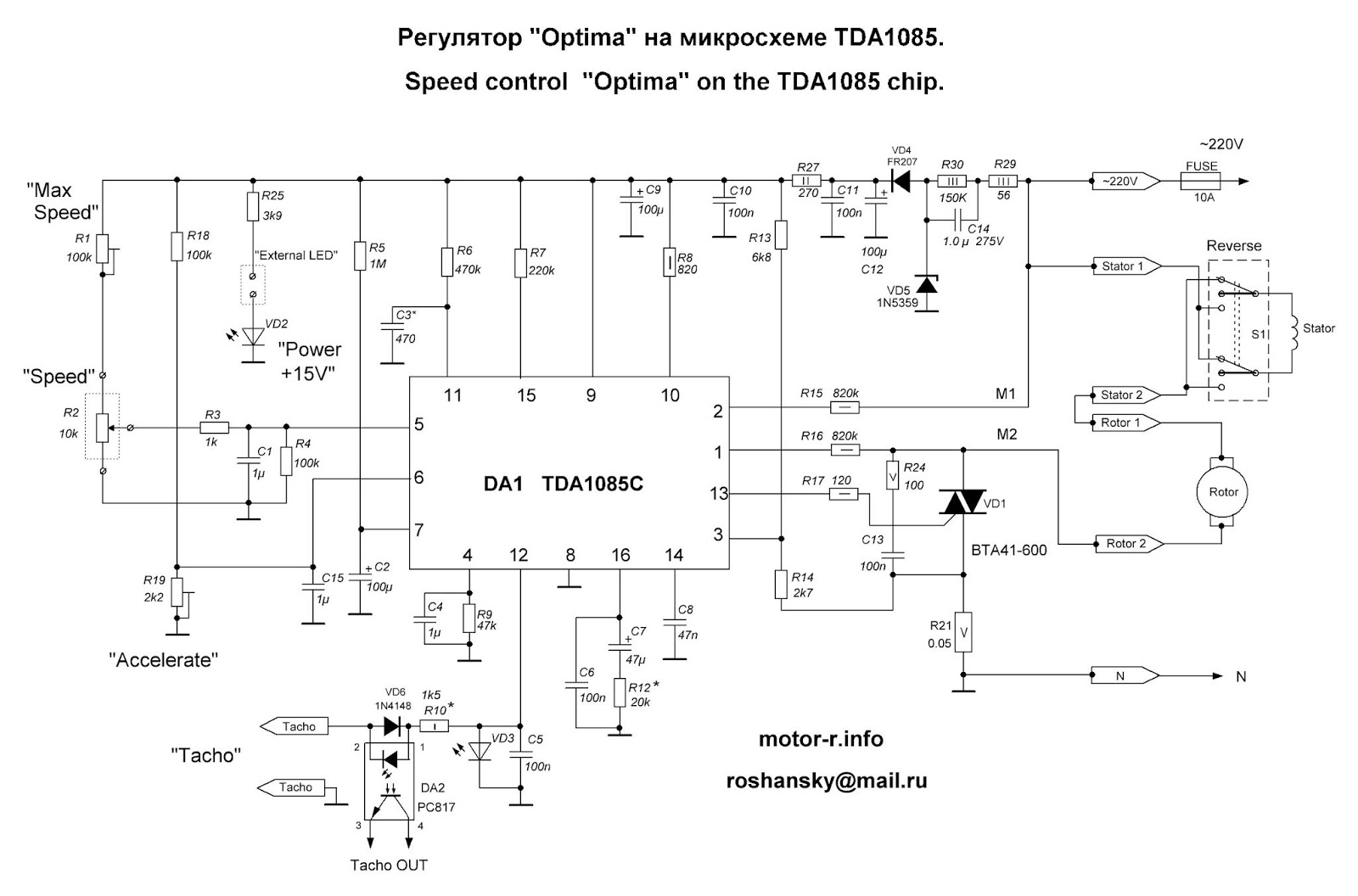
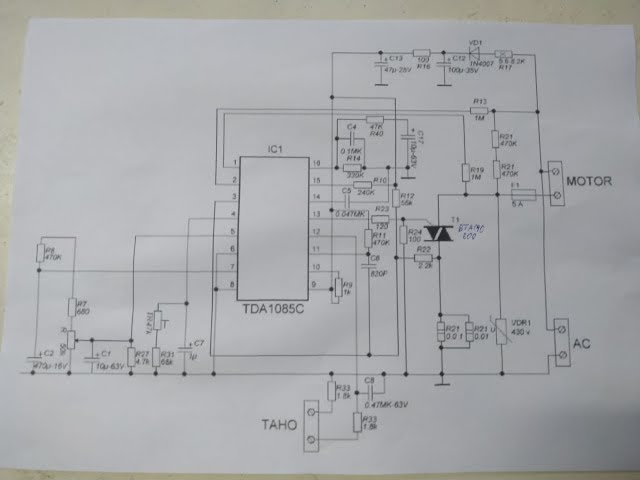
Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Измерения
Понятно, что число оборотов нужно как-то определять. Для этого используют тахометры. Они показывают число вращения на данный момент. Обычным мультиметром просто так измерить скорость не получится, разве что на автомобиле.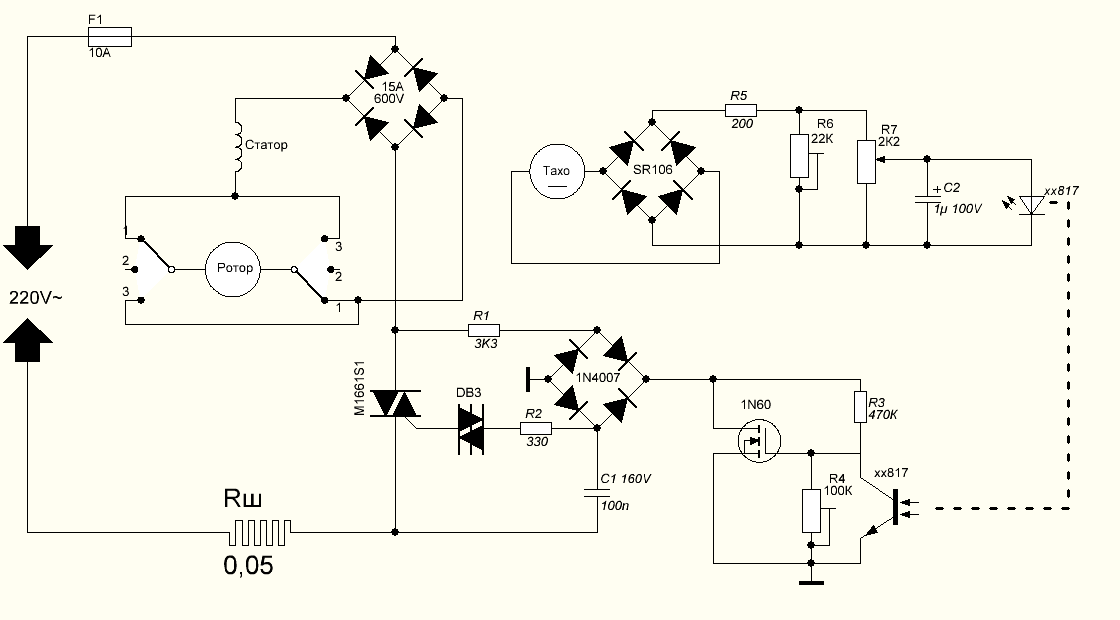
Как видно, на электрических машинах можно менять различные параметры, подстраивая их под нужды производства и домашнего хозяйства.
Регулятор вращения электродвигателя 220 вольт с обратной связью
Наконец, начали «доходить» руки до самодельного точильного станка. В наличии был универсальный коллекторный электродвигатель УВ 051-Ц. Скорость его 7000 об/мин, что в двое больше, чем нужно для электроточила. Вдобавок, хотелось иметь регулировку оборотов (желательно с обратной связью). Пришлось собирать схему, которая отвечала всем запросам.
Итак, как я пришел к тому, что скорость нужно снизить вдвое. На точильных камнях, обычно, есть надпись на какой максимальной скорости они могут работать. Чаще всего – это 25-30 м/с. Чтобы рассчитать необходимое количество оборотов электродвигателя для точильного станка – есть формула. Количество оборотов = (допустимые обороты на камне / диаметр точильного круга (в метрах) *3,14 )*60 секунд. Итого, максимальное количество оборотов электродвигателя для камня, который я приобрел = (25/0.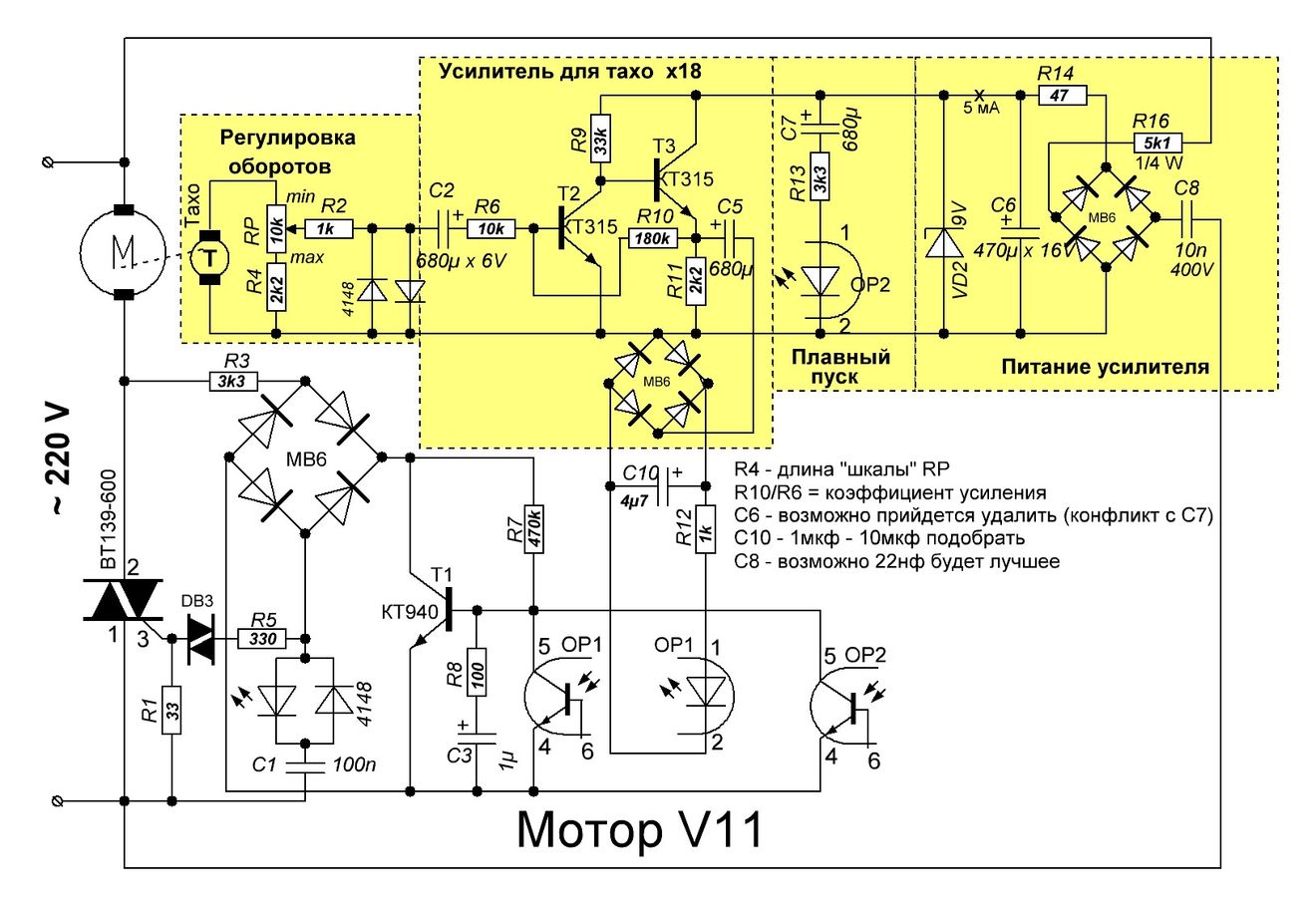 15+3.14)*60, что приблизительно равно 3185 об/мин. Вывод: скорость 7000 об/мин электродвигателя УВ 051-Ц нужно снизить вдвое.
15+3.14)*60, что приблизительно равно 3185 об/мин. Вывод: скорость 7000 об/мин электродвигателя УВ 051-Ц нужно снизить вдвое.
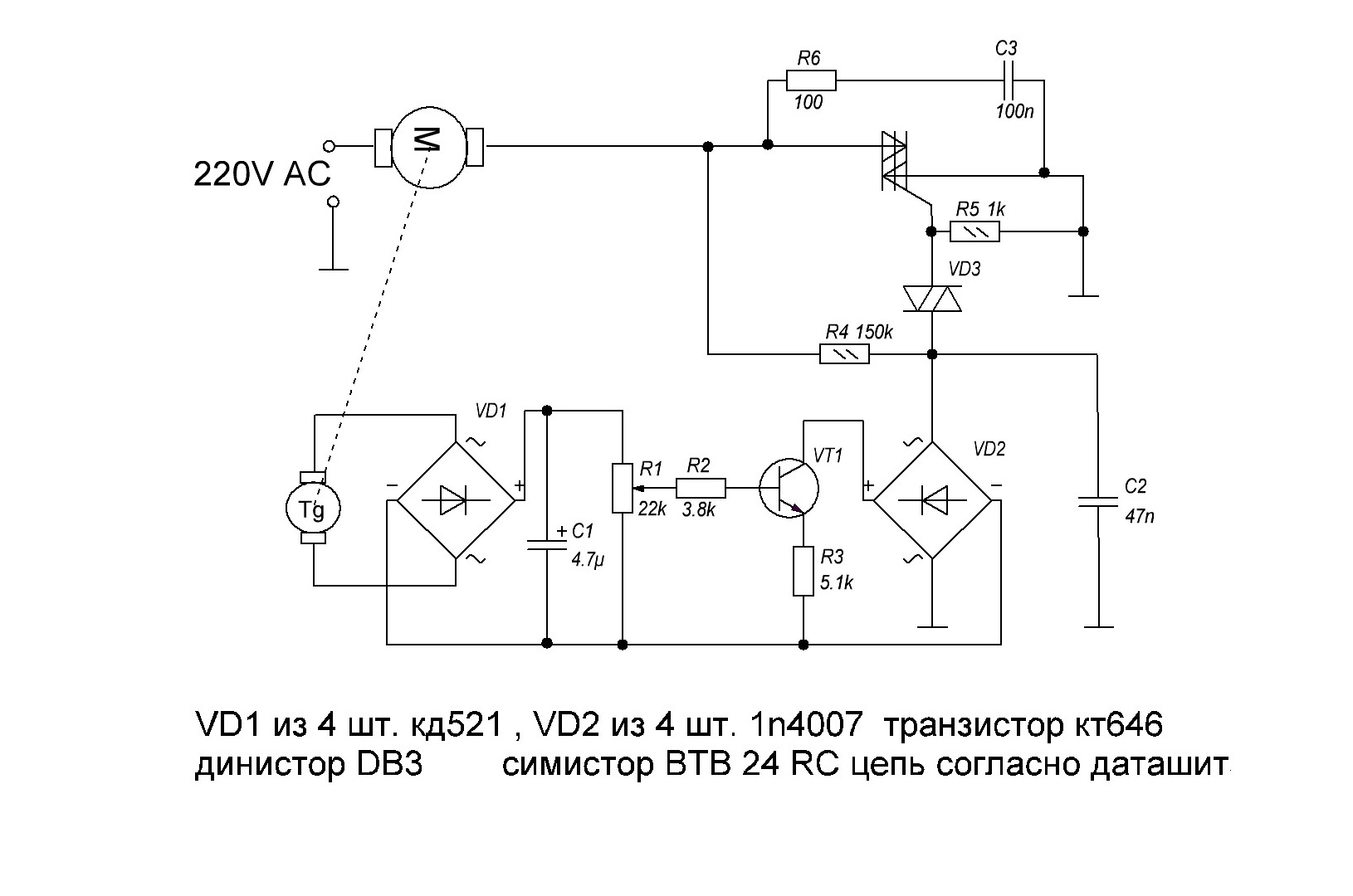
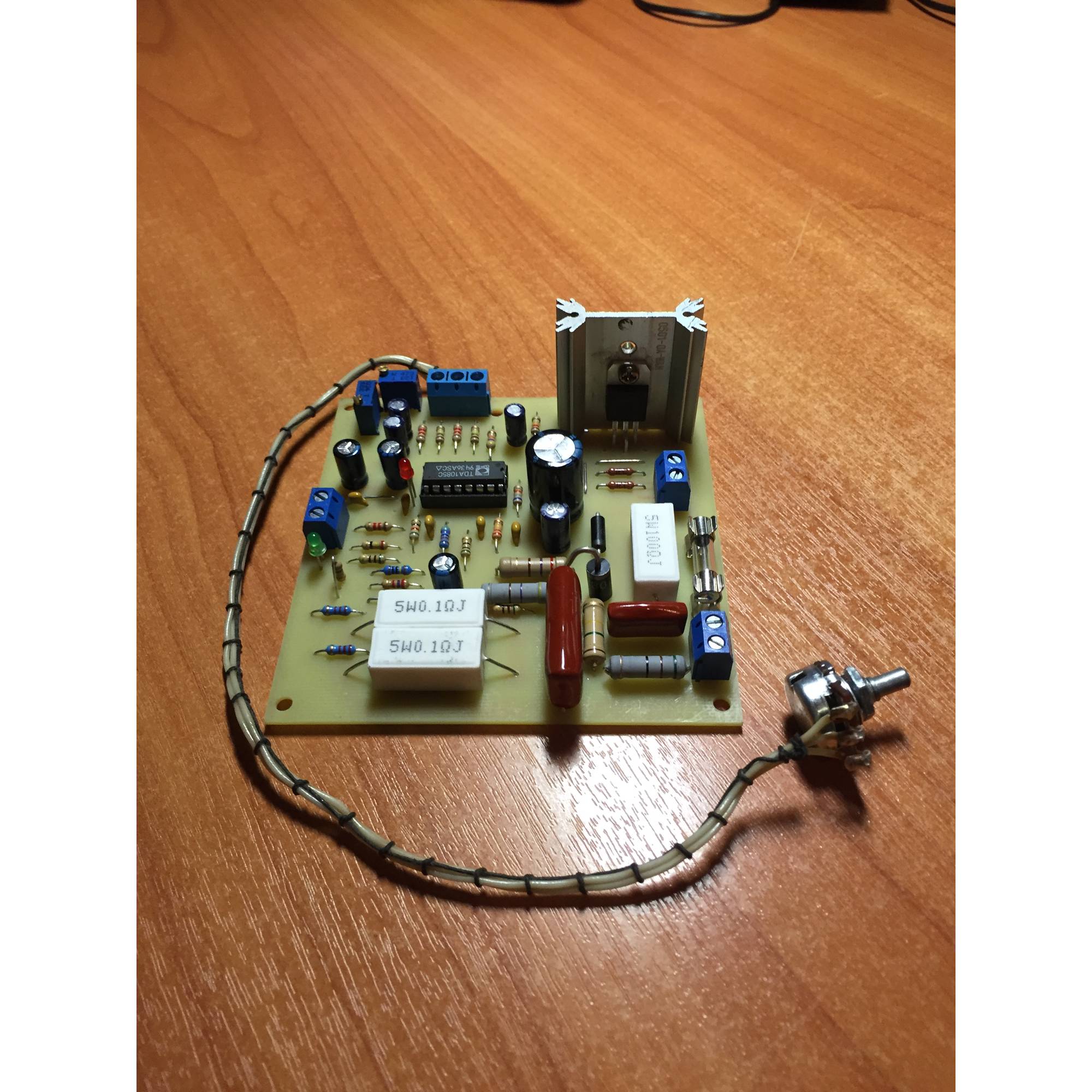
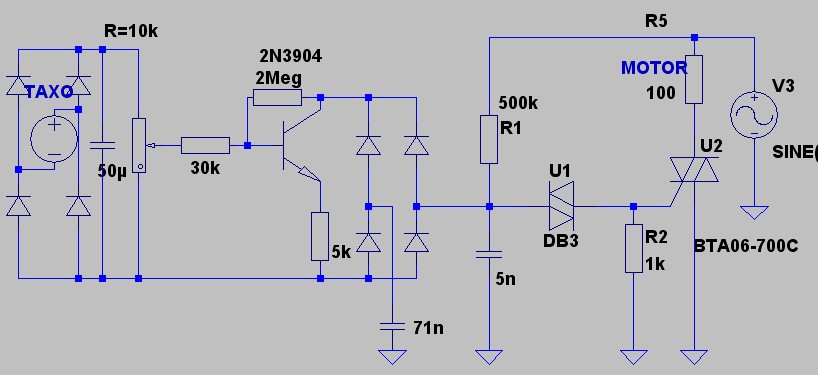
В результате поисков, наткнулся на простую схему регулятора оборотов коллекторного электродвигателя 220 вольт с обратной связью. Информации по ней было не много, т.к., возможно, мало кто ее собирал, сомневаясь в ее работоспособности, видя насколько она примитивна. Я же ее собрал на кусочке монтажной платы, произвел отладку, убедился в работоспособности.
Теперь пересказ принципа действия схемы регулятора оборотов коллекторного электродвигателя с обратной связью. R1+R2+C1 – формирует опорное напряжение, задающее скорость вращения двигателя. В момент приложения нагрузки, скорость вращения падает, снижается крутящий момент. Возникающая в двигателе и приложенная между управляющим контактом и катодом тиристора противо-ЭДС уменьшается. Пропорционально уменьшению противо-ЭДС увеличивается напряжение на управляющем контакте тиристора. Такое увеличение напряжение заставляет тиристор срабатывать при меньшем фазовом угле, и в следствии, подавать на двигатель больший ток.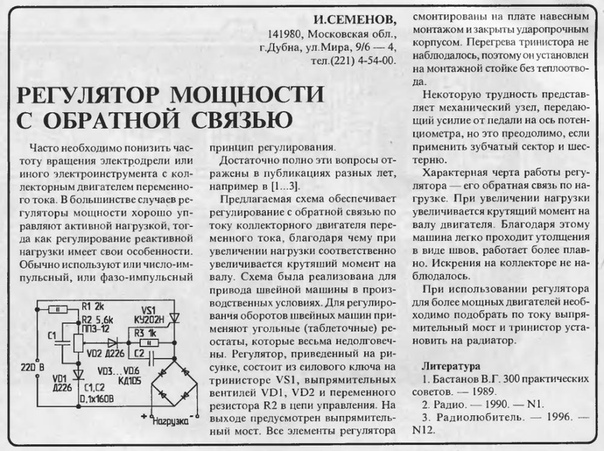
Тиристор нужно подбирать в зависимости от мощности электродвигателя. Мне хватило MCR100-8, в оригинальной схеме – КУ202Н. Под тиристор подбирается сопротивление резистора R3. Если тиристор КУ202Н – R3 можно не ставить. Диоды можно заменить на любые с аналогичными параметрами Д226, 1N4007 и т.д. С1 может быть в пределах 0,1-2uF, им устраняются рывки двигателя на малых оборотах. Конденсаторы с рабочим напряжением 250 вольт.
Регулятор оборотов электродвигателя 220в без потери
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ.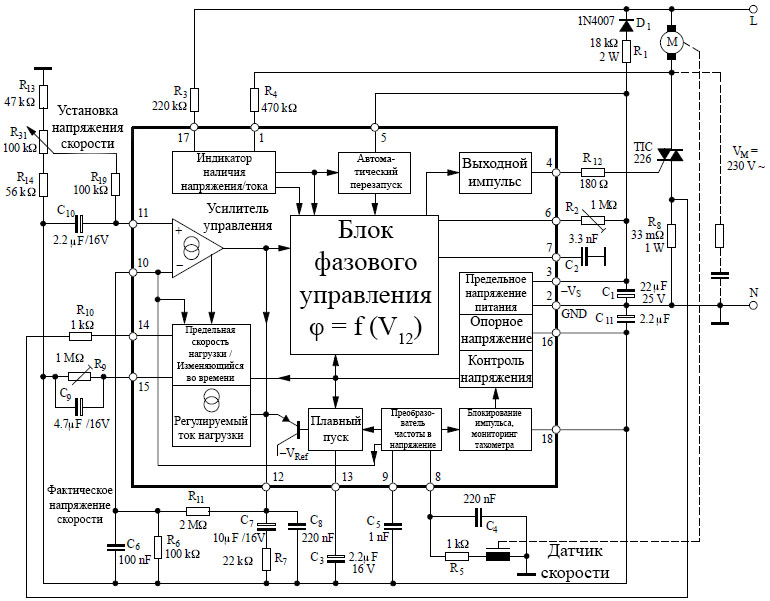 ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото — мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото — регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств.
 В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%. - Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото — шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото — схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления.
 Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными; - Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).

Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото — схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото — схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток..JPG.7cbfb0466d442a368ac4258bdbe51da3.JPG)
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого.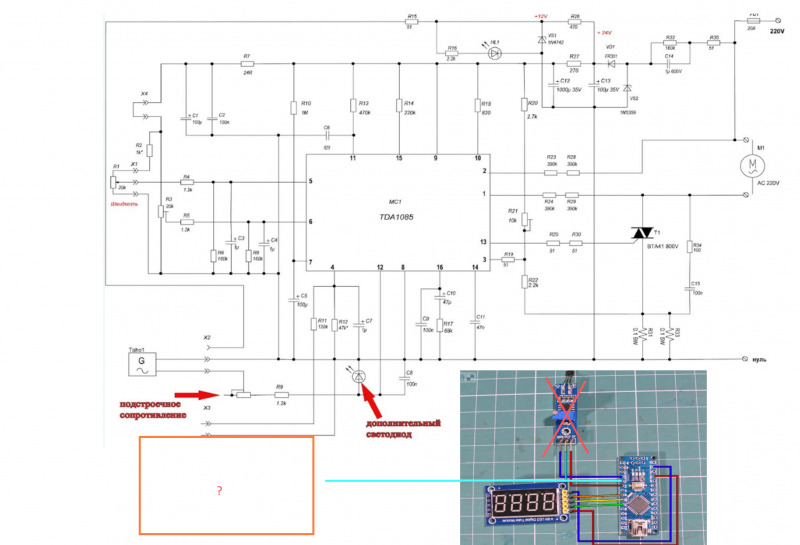 Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Каждый из нас дома имеет какой-то электроприбор, который работает в доме не один год. Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Виды двигателей
Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм. Мотор может быть:
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках.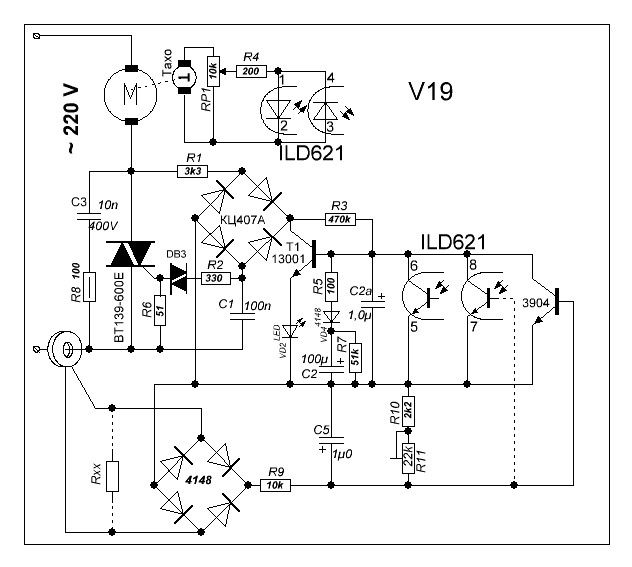 В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
Регулятор оборотов мощности
Принципы работы
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Вращение вала
Двигатели делят на:
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
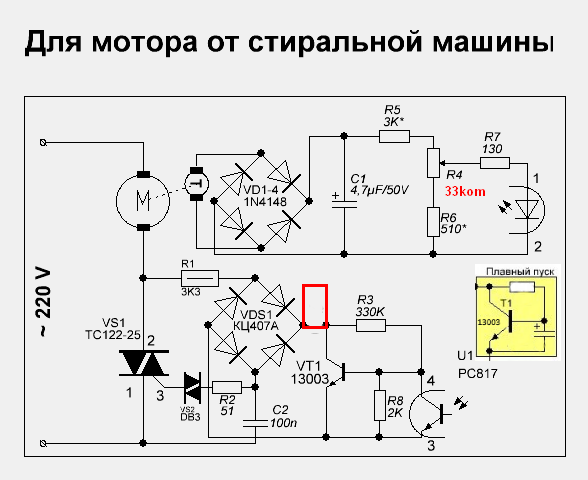
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор. В основном регулировка двигателя начинается от 1000 оборотов.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм. Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.
«>
Atmel U211B — контроллер оборотов двигателя от стиралки для домашнего станка » Журнал практической электроники Датагор (Datagor Practical Electronics Magazine)
Моя новая датагорская статья посвящена теме о превращении электродвигателя от стиральной машины в электропривод с поддержанием частоты оборотов и набором защит для небольшого токарного станочка.
Хитрый и полезный чип Atmel U211B нам в помощь. У кого имеется старый движок без дела — смело к паяльнику. Далее описана практическая реализация контроллера для его запуска и регулировки оборотов.
Содержание / Contents
Всё началось с удачного приобретения: маленького токарного станочка. Точный, не раздолбанный грубым обращением, но вот с приводной частью была беда. Предыдущий владелец использовал, по всей видимости, обычный асинхронный двигатель, а обороты регулировал перекидыванием ремня с одной пары шкивов на другую. Это лучше, чем ничего, но всё-таки далеко не самый правильный подход.Нам хотелось иметь возможность регулировать обороты в широких пределах, что позволяет обрабатывать заготовки разных диаметров с одинаковой лёгкостью.
В современных стиральных машинах применяются двигатели, которые отлично подходят для решения этой задачи. Существует много моделей, но все их объединяют некоторые конструктивные особенности: они щеточные, с последовательным возбуждением и имеют датчик оборотов! А ещё шкив под поликлиновый ремень. Такие разные и такие одинаковые…
Такие разные и такие одинаковые…Мне попался такой, итальянский, 350-14000 оборотов:
ВНИМАНИЕ! Нельзя включать двигатели с последовательным возбуждением без нагрузки и без регулятора оборотов. У них теоретически нет такого понятия, как обороты холостого хода. Двигатель может раскручиваться до чудовищных оборотов, т. е. уходить вразнос.
Если хотите проверить работоспособность двигателя, можно ткнуть на секунду. Надолго оставлять нельзя!
Внутри он выглядит примерно так:
Это просто маленький генератор переменки. Задача состоит в том, чтобы подсчитать количество импульсов, если по каким-то причинам они следуют слишком медленно, контроллер «поддает газу» пока обороты не придут в норму.
Благодаря обратной связи можно крутить двигатель даже очень медленно, не теряя в крутящем моменте.
Не забывайте, чтобы дать значительную нагрузку двигателю, нужно использовать дополнительный вентилятор охлаждения, т.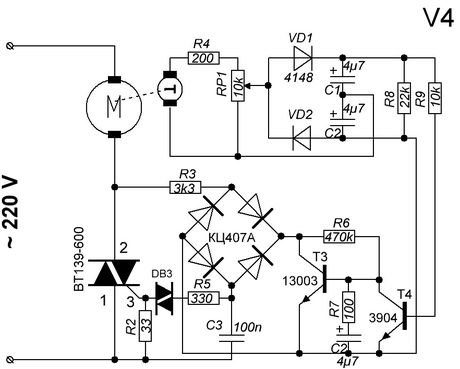 к. производительности родной крыльчатки на низких оборотах не хватает.
к. производительности родной крыльчатки на низких оборотах не хватает.
Останки неудачного макета:
Микросхема U211B от Atmel обещала точно такой же функционал, но схема немного проще, плата немного проще, настройка существенно проще.
Смотрите сами:
Существуют версии схемы на U211B для работы с оптическими датчиками и датчиками Холла. Примеры различных применений можно найти в документации на микросхему (см. архивы к статье). Тех, кто хочет глубже разобраться в теме, ещё раз отсылаю к даташиту. Честно говоря, нельзя наверняка сказать, что эта схема идеально подойдет вашему двигателю.
Дело в том, что двигатели всё-таки, при всей своей похожести, разные и чтобы всё работало правильно, нужно внимательно вчитаться в даташит и высчитать каждый номинал. Каюсь, я не стал этого делать. Уже надоела вся эта возня с TDA1085, хотелось просто включить и услышать наконец работу мотора! Я внес изменения только в той части, которая отвечает за вход с датчика и подобрал R3, R16, R17 и С11. Прокатило, как ни странно.
Резистор R4 (0,47 Ома 2 Вт) играет роль токового шунта, по нему защита определяет перегрузку. Он выбирается в зависимости от мощности двигателя по формуле из даташита. У меня резистор набран из двух 5-ваттных «белых кирпичей» по 0,22 Ома последовательно. Уж что было под рукой в момент сборки.
Подстроечник R8 задаёт чувствительность защиты. Мне пришлось его открутить почти до конца вправо, похоже номинал R4 всё-таки великоват. На среднем положении R8 двигатель вообще не стартовал.
Подбором R16, R17 устанавливаются минимальные и максимальные обороты.
Подстроечник R10 задаёт минимальное напряжение на двигателе. Если вы даже закоротите R16 и переменником R15 выставите обороты в ноль, мотор будет продолжать крутиться от этого напряжения, но без стабилизации оборотов.
Если вы даже закоротите R16 и переменником R15 выставите обороты в ноль, мотор будет продолжать крутиться от этого напряжения, но без стабилизации оборотов.
Если вал двигателя остановить, контроллер это поймет и попытается его перезапустить импульсами полной мощности. Сначала короткими, потом более длинными.
С11 — задающий элемент преобразователя частоты в напряжение. В зависимости от того, сколько импульсов на 1 оборот дает датчик, он может отличаться в очень широких пределах. В нашем случае 22 нФ работает нормально.
С этими номиналами всё крутится отлично, двигатель испытан в реальной работе.
На видео есть попытка дать нагрузку на вал рукой. Не повторяйте такого хулиганства, не нарушайте ТБ!
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.

▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
▼ Файловый сервис недоступен. Зарегистрируйтесь или авторизуйтесь на сайте.
Спасибо за внимание!
Контроллеры скорости двигателя — Принцип работы (PMDC BLDC и AC, управление крутящим моментом и скоростью)
Для справки (в основном моей) мой пост о том, как работают контроллеры двигателей PMDC, находится здесь: Как работает контроллер (PMDC) (чтобы вы могли видеть).
Я пытаюсь понять, как на самом деле работают контроллеры, помимо простой аналогии с широтно-импульсной модуляцией, потому что я знаю, что это намного сложнее. Кроме того, мне становится ясно, что не только разные типы двигателей имеют разные характеристики кривых мощности, но вы не можете выделить в этом части контроллера.То есть, да, конструкции двигателей имеют разные основные черты, но контроллеры, которые ими управляют, тоже есть — в основном из-за того, что контроллер может (и должен делать), чтобы заставить двигатель вращаться.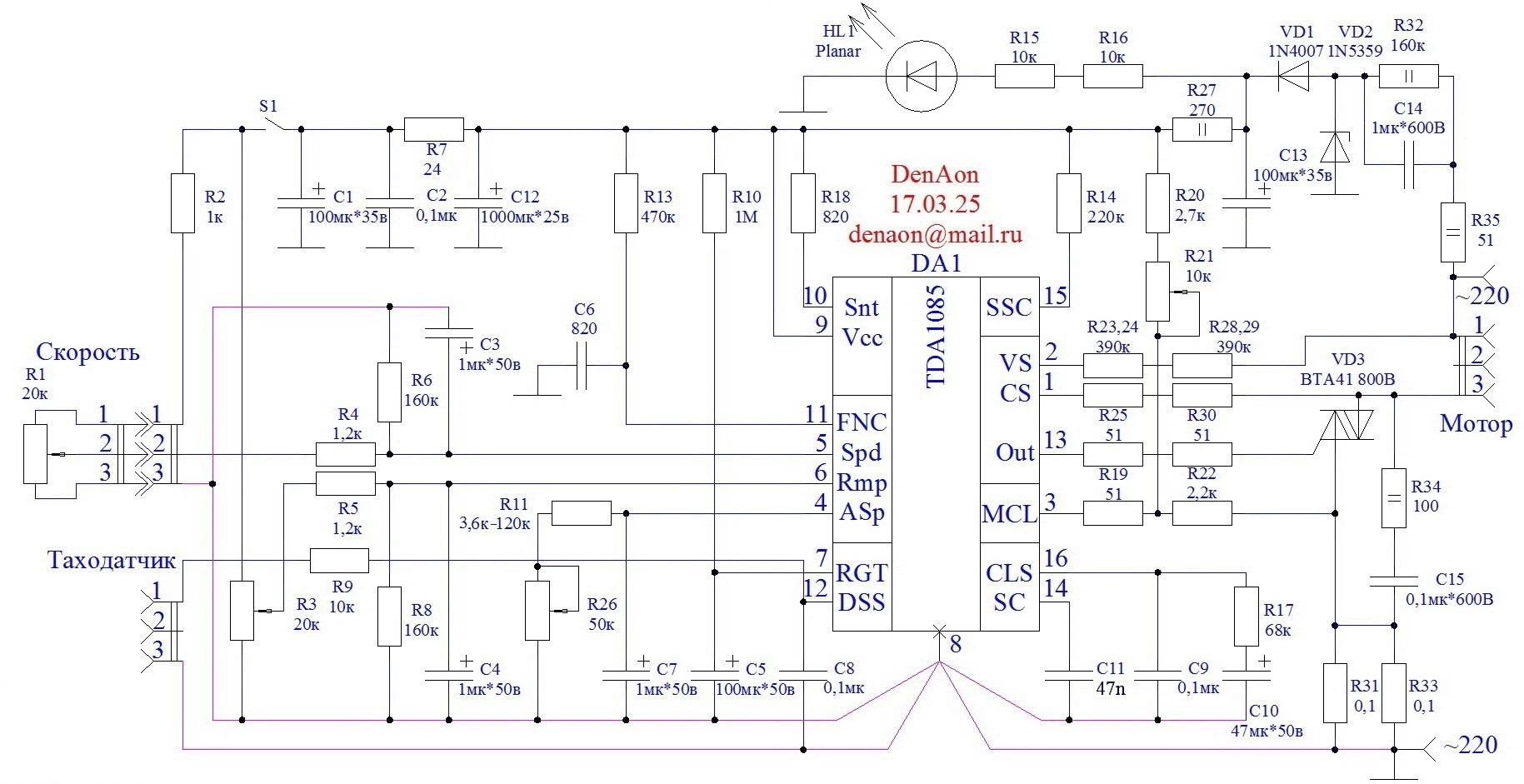 Ясно как грязь?
Ясно как грязь?
Как насчет аналогии с бензиновыми двигателями? Небольшой блочный 4-цилиндровый двигатель с турбонаддувом и впрыском топлива выдает мощность иначе, чем большой блок V8 с 4-цилиндровым двигателем, но на самом деле в конечном итоге может обеспечить такое же количество мощности. Я могу намного больше контролировать на маленьком 4-цилиндровом двигателе из-за турбонаддува и EFI, верно? На V8 я могу просто залить им больше бензина на 4 ствола.Примерно так — бесщеточный двигатель переменного тока имеет гораздо больше возможностей, чем обычный контроллер. Как обычно, аналогия, вероятно, вызывает больше вопросов, чем дает ответов. Ну что ж. Я старался.
Есть некоторые фундаментальные различия между тем, как контроллер мотора работает для щеточного мотора PMDC и бесщеточного мотора. Любой контроллер двигателя должен работать с каким-то устройством, которое знает, где находится двигатель (во время его вращения) и знает, когда подавать ток. В двигателе PMDC для этого используются щетки и коммутатор — физическое прикосновение к контакту, который размыкается и «заставляет» включать ток. В бесщеточном двигателе этого нет, и вместо этого используются датчики для определения положения. Я попытаюсь понять это, не вдаваясь в подробности о различных типах бесщеточных двигателей, а пока просто расскажу о бесщеточных двигателях постоянного тока.
В бесщеточном двигателе этого нет, и вместо этого используются датчики для определения положения. Я попытаюсь понять это, не вдаваясь в подробности о различных типах бесщеточных двигателей, а пока просто расскажу о бесщеточных двигателях постоянного тока.
Итак, я пошел искать информацию о контроллерах и нашел ее на сайте DigiKey: Использование управления замкнутым контуром в системах BLDC. Вся эта страница довольно устрашающая, но дала некоторые действительно простые объяснения, которые заставили меня осмыслить.Также немного о различиях между щеточными и бесщеточными двигателями. Здесь:
Преимущества двигателей BLDC перед щеточными двигателями постоянного тока:
- Высокая эффективность
- Более надежный и отсутствие дуги при коммутации — отсутствие щеток для обслуживания
- Более высокая скорость и соотношение мощности и габаритов
- В статоре выделяется тепло — легко снимается
- Меньшая инерция — без коммутатора
- Более высокая скорость разгона
Двигатели BLDC более эффективны, чем щеточные двигатели постоянного тока.
При той же входной мощности двигатель BLDC преобразует больше электроэнергии в механическую мощность, чем щеточный двигатель, из-за отсутствия трения из-за щеток. В щеточной конструкции двигателя щетки используются для изменения полюсов электромагнита, чтобы двигатель продолжал вращаться. Из-за отсутствия щеток нет ничего, что могло бы механически обработать изменение полярности. В результате требуется электронный контроллер для непрерывного переключения фазы обмотки, которая будет поддерживать вращение двигателя.Для этого на обмотки статора подается питание в определенной последовательности, как показано на Рисунке 1. Двигатели BLDC имеют три фазы. Для движения двигателя в каждом цикле коммутации приводятся в действие две фазы. Одна фаза получает высокий уровень (VMotor), а другая — низкий уровень (GND). Оставшаяся фаза остается плавающей. На каждом этапе коммутации двигатель поворачивается на 60 градусов. По завершении всех циклов двигатель повернется на полные 360 градусов.

Рисунок 1: Выход датчика BLDC в зависимости отвремя коммутации.
Для реализации этой последовательности важно знать положение ротора. Это делается с помощью датчиков, таких как датчики на эффекте Холла (сенсорное управление), или путем измерения обратной ЭДС (бессенсорное управление). Датчики на эффекте Холла встроены в статор. Когда магнитные полюса ротора проходят рядом с датчиками Холла, они подают высокий или низкий сигнал, указывая на то, что северный или южный полюса проходят поблизости. Положение ротора определяется точной комбинацией сигналов трех датчиков Холла.
Sensored BLDC представлен в этом примечании к применению. Три датчика положения обеспечивают текущее положение ротора. Датчики положения переключаются на 180 электрических градусов электрического вращения. Временная диаграмма выходного сигнала датчика и требуемого напряжения привода двигателя показана на рисунке 1. Дополнительное использование широтно-импульсной модуляции (ШИМ) обеспечивает управление скоростью или крутящим моментом, как показано на фазах A, B и C на рисунке 1.
цикл модулированного выходного управляющего сигнала (PWM) изменяется для изменения скорости и крутящего момента двигателя.
Я выделил два интересных момента. Во-первых, с трехфазным двигателем вы включаете две фазы и позволяете третьей плавать. Во-вторых, вы можете контролировать скорость и крутящий момент. Помните, что вольт = скорость, ток = крутящий момент, поэтому я переведу это как: мы можем контролировать как напряжение, так и ток импульсов. Хорошо, я чувствую, что мы к чему-то приближаемся.
И, наконец, я добрался до главного: основы управления двигателем: режимы работы привода через Carotron — компанию, занимающуюся контроллерами двигателей.
Вот синопсис:
1.) Приводы постоянного тока — Контроль крутящего момента:
Для управления крутящим моментом двигателей постоянного тока привод постоянного тока регулирует ток якоря.
Напряжение якоря не регулируется, что позволяет двигателю работать с любой скоростью, необходимой для достижения заданного уровня тока / момента.

2.) Приводы переменного тока — Контроль крутящего момента:
Привод переменного тока использует комплексную обработку напряжения, тока, частоты и положения двигателя, чтобы обеспечить возможность регулирования крутящего момента.Работа в режиме МОМЕНТ обычно требует обратной связи от энкодера. Даже оценка способности инверторного привода регулировать крутящий момент не является простой задачей. Не думайте, что инвертор и двигатель, работающие в режиме «крутящего момента», будут создавать линейный и пропорциональный выходной крутящий момент относительно задания. Полное управление крутящим моментом может зависеть от использования внешней схемы задания крутящего момента или управления, которое обладает гибкостью и возможностью регулировки для компенсации любых недостатков привода / двигателя.
3.) Приводы постоянного тока — Контроль скорости (скорости):
Для регулирования скорости двигателя постоянного тока привод обычно регулирует напряжение якоря.
Насколько хорошо это работает, зависит от того, какой сигнал обратной связи используется для представления скорости двигателя.
Общие варианты выбора для некоторых приводов постоянного тока следующие:
- AFB — Обратная связь якоря
- TFB — обратная связь тахометра
- EFB — обратная связь энкодера
(не забудьте посмотреть ссылку на источник, чтобы узнать больше по этому поводу.)
4.) Приводы переменного тока — Контроль скорости (скорости):
Преобразователи частотыAC Inverter могут иметь несколько выбираемых методов управления. Вот несколько примеров:
- Управление V / F (V / F, напряжение / частота — также называется управлением вольт на герц)
- Управление V / F с PG или обратной связью тахометра
- Вектор разомкнутого цикла
- Замкнутый контур или вектор потока
В / Ф, напряжение / частота, Метод управления — также называемый управлением вольт на герц, является наиболее распространенным методом управления инвертором.
Не требуя устройства обратной связи, он подходит для применения в двигателях общего назначения и с несколькими двигателями.
Управление напряжением / частотой с PG обратной связью обеспечивает лучшее регулирование скорости по сравнению с системой с обратной связью.
Вектор разомкнутого контура , иногда называемый бессенсорным вектором, использует более сложный алгоритм управления для обеспечения точного управления скоростью, быстрого отклика и более высокого крутящего момента на низкой скорости.
Вектор потока или вектор с обратной связью требует обратной связи от энкодера и обеспечивает точное управление скоростью и полным номинальным крутящим моментом в широком диапазоне скоростей — иногда даже при нулевых оборотах в минуту.
Инверторыи их двигатели также могут работать в профиле «Постоянная мощность в лошадиных силах», когда скорость двигателя может быть увеличена за пределы номинальной скорости с понижением номинальной мощности крутящего момента.
Хорошо, я чувствую, что это начало. Следующим шагом квеста будет изучение типичных двигателей и контроллеров, которые вы можете получить, и определение их типов и, следовательно, того, что вы можете с ними делать. Оставайтесь в курсе.
Нравится:
Нравится Загрузка…
Связанные
Модель контроллера скорости агрегата для векторного управления Электроприводы переменного тока
Модель регулятора скорости агрегата для векторного управления Электроприводы переменного тока
Библиотека
Simscape / Электрооборудование / Специализированные энергетические системы / Электроприводы / Основной привод Блоки
Описание
Блок регулятора скорости (AC) представляет собой
Модель регулятора скорости PI для машин переменного тока, используемых в векторном управлении
диски.Он имеет два рабочих экземпляра: первый с обоими крутящими моментами.
и выходы задания магнитного потока, а второй — выход задания крутящего момента
только. Модели первого и второго экземпляров показаны в
цифры.
Параметры
Вкладка контроллера
- Тип контроллера
-
Укажите тип используемого контроллера:
- Тип регулирования
-
Укажите тип используемого регулирования:
- Sample time (s)
-
Временной шаг, используемый для моделирования, в секундах.Значение по умолчанию —
2 e-6. - Изменение задания скорости (об / мин / с) [Замедление, Ускорение]
-
Максимальная скорость изменения задания скорости в об / мин / с, чтобы токи машины оставались в пределах номинальных значений. Этот параметр требуется и активируется только в том случае, если параметр Тип регулирования установлен на
Регулировка скорости. По умолчанию
значение —
По умолчанию
значение — [-1800,1800]. - Пропорциональное усиление
-
Пропорциональное усиление ПИ-регулятора.Этот параметр обязателен и доступно только в том случае, если параметр Тип регламента установлен на
Регулировка скорости. По умолчанию значение5. - Интегральное усиление
-
Интегральное усиление ПИ-регулятора. Этот параметр обязателен и доступно только в том случае, если параметр Тип регламента установлен на
Регулировка скорости. По умолчанию значение10. - Частота среза фильтра нижних частот (Гц)
-
Частота среза фильтра первого порядка измерения скорости, дюйм герц.Этот параметр является обязательным и доступен, только если Регламент Параметр типа установлен на
Регулировка скорости. Значение по умолчанию —100.
- Насыщение выходного крутящего момента (Н-м) [Отрицательное, Положительный]
-
Минимальное (отрицательное) и максимальное (положительное) задание крутящего момента пределы вывода в ньютон-метрах. Значение по умолчанию —
[-17,8,17,8]. - Время выборки (с)
-
Время выборки регулятора скорости в секундах.Выборка время должно быть кратным временному шагу моделирования. Значение по умолчанию это
100e-6.
Вкладка машины
- Номинальная частота (Гц)
-
Номинальная частота машины в герцах. Этот параметр требуется и доступно только в том случае, если Тип регулятора скорости параметр установлен на
С выходом задания магнитного потока. В значение по умолчанию —60. - Пары полюсов
-
Количество пар полюсов.Этот параметр обязателен и доступен только если параметр Тип контроллера скорости установить на
С выходом задания магнитного потока. В значение по умолчанию —2. - Номинальный поток (Вт)
-
Номинальный поток для станка в Вебере. Этот параметр требуется и доступно, только если параметр Регулятор скорости типа установлен на
С выходом задания магнитного потока. В значение по умолчанию —0,3.
Входы и выходы
-
N -
Скорость машины в об / мин.
-
N * -
Заданная скорость машины в об / мин. Когда Постановление параметр типа установлен на
Регулировка крутящего момента, этот ввод относится к заданному крутящему моменту машины. -
MagC -
Двоичный сигнал, указывающий, достаточно ли намагничен станок быть запущенным (1) или нет (0). Этот сигнал обычно выдается другой контроллер, который может устанавливать намагничивание уровень машины, например, полевой контроллер.
Этот вход доступен, только если контроллер скорости параметр типа устанавливается на
с заданием магнитного потока выход. -
Крутящий момент * -
Контрольный крутящий момент в ньютон-метрах.
-
Ctrl -
Шина, содержащая следующие измерения:
-
Задание крутящего момента— в ньютон-метрах. -
Эталон флюса (Wb)— Это сигнал доступен только когда параметр Регулятор скорости типа установлен наС выходом задания магнитного потока. -
Ошибка— Когда действуют правила параметр типа установлен наРегулировка скорости, этот сигнал ошибки скорости (разность между опорным и фактическая скорость). В противном случае — ноль. -
Ссылка— Задание скорости, в об / мин. Когда тип регулирования параметр установлен наРегулировка крутящего момента, это измерение относится к эталонному крутящему моменту в ньютон-метрах.
-
-
Флюс * -
Эталон флюса, Вебер.Этот вывод доступен только когда установлен параметр Тип контроллера скорости до
С выходом задания магнитного потока.
Примеры
Блок регулятора скорости (AC) используется в AC3, AC4, AC5, AC6, и блоки AC7 из библиотеки Electric Drives.
Ссылки
[1] Bose, B. K. Modern Power Electronics and AC Drives , NJ: Prentice-Hall, 2002.
Представлен в R2015b
Подключение регуляторов скорости и двигателей — документация коптера
В этой статье объясняется, как подключить ESC, двигатели и пропеллеры к автопилоту.Pixhawk используется в качестве примера, но другие автопилоты подключаются аналогичным образом.
Подключите провода питания (+), массы (-) и сигнала (ов) для каждого ESC к основные выходные контакты автопилота по номеру двигателя. Найдите свой тип рамы ниже, чтобы определить назначенный порядок двигателей.
Выходы Pixhawk (пронумерованы). Первые 4 контакта имеют цветовую маркировку для подключения Quadframe
.Проверка направления вращения двигателя
Если вы закончили Радио и калибровки ESC, вы можете проверить, что ваш двигатели вращаются в направлении коррекции:
-
Убедитесь, что на вашем коптере нет пропеллеров!
-
Включите передатчик и убедитесь, что переключатель режима полета установлен в положение Стабилизируйте.
-
Подключить аккумулятор.
-
Направить коптер, удерживая дроссельную заслонку и руль вправо на пять секунд.
-
Если не удается поставить дроссельную заслонку вправо и вниз, а также двигатели не вращаются, вероятно, не удалось выполнить предпусковую безопасность Проверьте.
- Ошибка проверки безопасности Pre-Arm также отображается красным сигналом постановки на охрану. свет дважды мигает, а затем повторяется.
- Если предварительная проверка не удалась, перейдите на страницу предварительной проверки безопасности и устраните проблему или отключите проверьте перед продолжением.
-
Когда вы можете поставить на охрану успешно, примените небольшое количество газа и наблюдать и отмечать направление вращения каждого двигателя. Они должны соответствовать направления, показанные на изображениях выше для выбранного кадра.
-
Если двигатель вращается в неправильном направлении, поверните его назад.
Подсказка
- Направление мотора меняется на противоположное, просто поменяв местами два из
-
три ESC к проводам питания двигателя.
Проверка нумерации двигателей с помощью теста Mission Planner Motor
Альтернативный способ проверить, подключены ли двигатели правильно использовать тест «Двигатели» в Первоначальном планировщике миссий. Настройки.
Планировщик миссии: Моторный тест
При подключении к автомобилю через MAVLink вы можете нажать на зеленый кнопки, показанные выше, и соответствующий двигатель должен вращаться в течение пяти секунд. Буквы соответствуют номерам двигателей, как показано в примере. ниже.
- Сначала снимите реквизит!
- Если двигатели не вращаются, увеличьте «Throttle%» до 10% и повторите попытку. Если что не работает, попробуйте 15%
Первым вращается мотор, расположенный прямо перед случай конфигурации +, или первый мотор справа от прямой вперед в случае конфигурации X.Затем моторный тест продолжится. по часовой стрелке.
В случае X8 сначала вращает верхний правый передний мотор, а затем нижний передний правый и продолжайте по тому же шаблону.
OctoV сначала вращает передний правый двигатель, а затем снова продолжает движение. по часовой стрелке до левого переднего мотора.
Использование платы распределения питания
Есть два способа подключения выходов двигателя. Либо подключите электронные регуляторы скорости (ESC) непосредственно к автопилоту ИЛИ использовать плату распределения питания (PDB).
При использовании PDB подключите питание (+), землю (-) и сигнал (ы) провода для каждого ESC к PDB в соответствии с номером двигателя. Найдите свою раму введите ниже, чтобы определить назначенный порядок двигателей. Затем подключите сигнальные провода от PDB к основным выводам выходного сигнала на автопилот (убедитесь, что номера двигателей соответствуют номера основных выходных контактов на контроллере). Если вы используете мощность модуля, необязательно подключать провода питания и заземления от PDB к плате автопилота.Если вы хотите использовать эти кабели в дополнение к силовому модулю или вместо него или как обычные точки для слаботочных сервоприводов подключите заземляющий (-) провод к основному вывод заземления (-) и провод питания (+) к выводу (+) основного выхода.
Оптоизолированные регуляторы скорости KDE (и другие)
Серии KDEXF-UAS и KDEF-UASHV оптоизолированы и не обеспечивают Выходная мощность BEC для периферийного оборудования. Им требуется + 5В для питания оптоизолятор, а Pixhawk может питаться от сервопривода рельс, он не подает + 5В на рельс сервопривода.ESC должны быть питание от BEC или перемычкой от неиспользуемого разъема на плате. Настоятельно рекомендуется использовать BEC для питания шины. чем джемпер.
ESC KDE имеют фиксированные диапазоны ШИМ, поэтому вы должны вручную настроить выход диапазон каждого сигнала ШИМ, так что RCx_MIN равен 1100, а RCx_MAX равен 1900us используя страницу расширенных параметров или полную настройку параметров в планировщик.
Pixhawk ESC issues
Сообщается, что некоторые ESC не работают с Pixhawk.
Pixhawk должен работать с каждым ESC, который работает с обычным RC приемник (потому что он отправляет тот же тип сигнала), но есть одно известное исключение, EMAX ESC.
В большинстве случаев проблемы возникают из-за неправильного подключения. Всегда подключайте сигнал и землю. Проверьте свой тип ESC, чтобы решить, как подключить линию + 5 В. Для Pixhawk вы должны подключить как сигнал, так и сигнальную землю, чтобы ESC работал.
Дополнительную информацию смотрите в этом видео.
Двунаправленный регулятор скорости двигателя постоянного тока
Корзина пуста
Посмотреть корзину Проверять, выписываться- Заказы
- Список сравнения
- Список желаний
Отслеживать мои заказы
Отслеживайте мой заказ (а)
Войти ЗарегистрироватьсяЭл. адрес
Пароль Забыли пароль? Зарегистрируйте новую учетную запись Проверка антиботавойти в систему
Запомни меня
(02) 9687-9187- Дом
- Информация поддержки
- Свяжитесь с нами
- О нас
- Каталог
- F.A.Q
- Клиентские проекты
- видео на YouTube
- Подробнее
