Как работает регулятор мощности паяльника на PIC16F628A. Какие функции он выполняет. Каковы преимущества использования микроконтроллера в регуляторе паяльника. Как собрать и настроить такое устройство самостоятельно.
Принцип работы регулятора мощности на PIC16F628A
Регулятор мощности паяльника на микроконтроллере PIC16F628A представляет собой цифровое устройство для точного контроля температуры жала паяльника. Основные принципы его работы:
- Микроконтроллер управляет включением и выключением нагревательного элемента паяльника с помощью симистора
- Используется широтно-импульсная модуляция (ШИМ) для регулировки мощности
- Температура контролируется путем изменения скважности ШИМ-сигнала
- Обеспечивается 20 уровней регулировки мощности
- Имеется светодиодная индикация текущего уровня мощности
Как это работает? Микроконтроллер формирует управляющие импульсы для симистора, который коммутирует нагрузку. Меняя ширину этих импульсов, можно плавно регулировать среднюю мощность, подаваемую на паяльник.

Основные функции регулятора на PIC16F628A
Регулятор мощности паяльника на базе PIC16F628A обладает следующим функционалом:
- Плавная регулировка мощности в диапазоне 0-100%
- 20 фиксированных уровней мощности
- Индикация текущего уровня на светодиодной шкале
- Запоминание последнего установленного уровня мощности
- Режим форсированного разогрева паяльника
- Автоматическое отключение через заданное время
- Защита от перегрева
Все эти функции реализованы программно в микроконтроллере. Пользователь управляет регулятором с помощью двух кнопок — увеличения и уменьшения мощности.
Преимущества использования микроконтроллера
Применение микроконтроллера PIC16F628A в регуляторе мощности паяльника дает ряд существенных преимуществ по сравнению с аналоговыми схемами:
- Высокая точность регулировки мощности
- Возможность реализации дополнительных функций
- Простота модификации алгоритма работы
- Компактность и надежность конструкции
- Низкое энергопотребление
- Невысокая стоимость компонентов
Микроконтроллер позволяет легко добавлять новые режимы работы и функции путем перепрограммирования. Это дает возможность гибко настраивать регулятор под конкретные задачи.

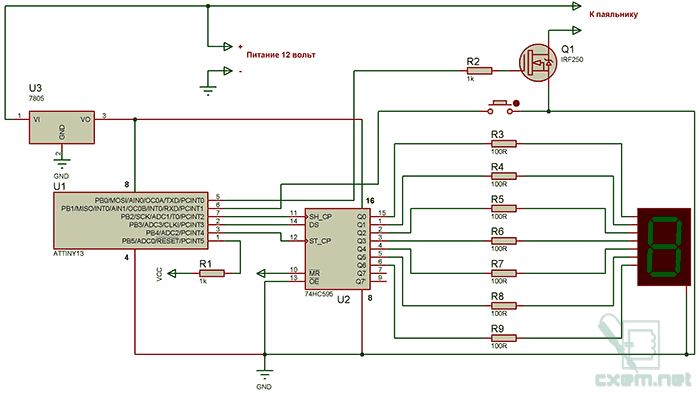
Схема регулятора мощности на PIC16F628A
Принципиальная электрическая схема регулятора мощности паяльника на микроконтроллере PIC16F628A показана на рисунке:
[Здесь должно быть изображение схемы]
Основные элементы схемы:
- DD1 — микроконтроллер PIC16F628A
- VS1 — симистор для коммутации нагрузки
- DA1, DA2 — оптронная развязка
- VD1-VD7 — светодиодный индикатор
- SB1, SB2 — кнопки управления
Схема обеспечивает гальваническую развязку низковольтной и силовой частей с помощью оптронов. Это повышает безопасность и помехозащищенность устройства.
Алгоритм работы программы микроконтроллера
Программа для PIC16F628A реализует следующий алгоритм работы регулятора:
- Инициализация при включении питания
- Считывание последнего сохраненного уровня мощности из EEPROM
- Основной цикл:
- Опрос кнопок
- Изменение уровня мощности при нажатии кнопок
- Формирование ШИМ-сигнала для симистора
- Обновление светодиодной индикации
- Проверка таймера автоотключения
- Сохранение текущего уровня мощности при выключении
Программа написана на языке ассемблера для максимального быстродействия. Это позволяет точно формировать управляющие импульсы для симистора.
Сборка и настройка регулятора своими руками
Собрать регулятор мощности паяльника на PIC16F628A вполне по силам радиолюбителю. Для этого потребуется:
- Изготовить печатную плату по предложенной схеме
- Установить и припаять все компоненты
- Запрограммировать микроконтроллер прошивкой
- Настроить и откалибровать регулятор
При сборке важно соблюдать меры электробезопасности, так как устройство работает с сетевым напряжением. Настройка заключается в подборе номиналов некоторых резисторов для точной работы индикации.
Возможные улучшения конструкции
Базовую схему регулятора можно усовершенствовать, добавив следующие функции:
- Цифровой дисплей для отображения температуры
- Термопара для измерения реальной температуры жала
- Энкодер вместо кнопок для удобства управления
- Интерфейс для связи с компьютером
- Дополнительные режимы работы (пайка, лужение и т.д.)
Все эти улучшения можно реализовать программно в микроконтроллере, лишь немного изменив схему. Это показывает гибкость и универсальность цифрового подхода к построению регулятора мощности.

Микропроцессорный регулятор мощности для паяльника на PIC16F628A
Update. Обратите внимание, что прошивка из этого поста — не самая свежая. Лучше брать прошивку из поста «Снова о регуляторе мощности. Универсальная прошивка для любого включения светодиодов».
Что он может:
- 20 уровней регулировки с запоминанием уровня
- фазовое управление мощностью
- линейная регулировка мощности (не фазы)
- наличие режима форсированного разогрева в течении 5 или 10 минут
- плавное включение нагрузки
- автоматическое отключение нагрузки через 30 мин
- наличие режима без отключения нагрузки
- линейная шкала на светодиодах
- управление мощностью и выбор режимов осуществляется двумя кнопками
- в схеме использован микропроцессор PIC16F628A.
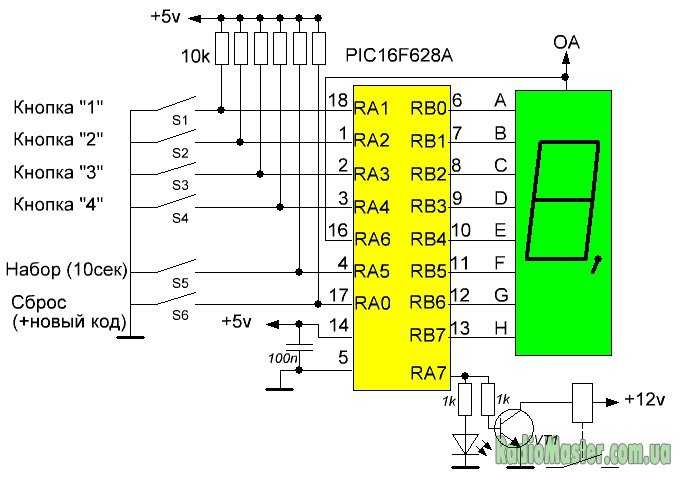
Принципиальная схема контроллера
Регулятор мощности, принципиальная схема, PIC16F628A
Перечень элементов
| Обозначение | Номинал | Примечание |
|---|---|---|
| C1 | 1n | |
| C2 | 10µ x 10V | |
| C3 | 1n | |
| C4 | 1n | 600V |
| C5 | 100n | |
| DA1 | PC817 | |
| DA2 | MOC3020 | MOC3020-MOC3023 |
| DD1 | PIC16F628A | |
| R1 | 2k2 | |
| R2 | 220k | |
| R3 | 220k | |
| R4 | 1k | |
| R5 | 22k | |
| R6 | 220 | |
| R7 | 39 | |
| R8 | 220 | |
| R9 | 220 | |
| R10 | 220 | |
| R11 | 220 | |
| R12 | 220 | |
| R13 | 220 | |
| R14 | ||
| R15 | 220 | |
| R16 | 220 | |
| R17 | 220 | |
| R18 | 220 | |
| R19 | 220 | |
| VD1 | 1N4148 | |
| VD2 | 1N4148 | |
| VD3 | 1N4148 | |
| VD4 | 1N4148 | |
| VD5 | 1N4148 | |
| VS1 | MAC15N | MAC16N |
| VT1 | 2SC828 |
Благодаря наличию оптронов цифровая часть гальванически развязана с сетью, но, тем не менее, в схеме присутствует высокое напряжение, поэтому при повторении конструкции необходимо соблюдать технику безопасности!
Осцилограммы на выводах процессора.
Смещение импульсов друг относительно друга на осцилограмме соответствует второй ступени регулировки мощности (горит 1 светодиод)
Ширина импульса на RA4 около 170uS, на RB3 около 1.5mS
Прошивка
Версия 2: (доступно зарегистрированным пользователям)
Обратите внимание, что более свежая и функциональная прошивка есть здесь
Правильно выставленные фьюзы — залог успеха:
CONFIG = 0x2150
или
CONFIG = 0x3F50 (если считать неопределенные биты 9-12 за «1»)
| CP | — | — | — | — | CPD | LVP | BOREN | MCLRE | FOSC2 | !PWRTE | WDTE | FOSC1 | FOSC0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | x | x | x | x | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 |
Для прользователей IC-PROG установка фьюзов должна выглядеть так (сам не проверял, подтвердите или поправьте в комментах кто пробовал)
FOSC = 100 (INTOSC internal oscillator: I/O function on RA6/OSC2/CLKOUT pin, I/O function on RA7/OSC1/CLKIN)
 Disabled)
Disabled)PWRTE = 0 (Power-up Timer Enable bit. Enabled)
MCLRE = 0 (RA5/MCLR Pin Function Select bit. RA5/MCLR is digital I/O)
LVP = 0 (Low Voltage Programming Enable bit. RB4/PGM is digital I/O, Low Voltage Programming is off)
Как и любая цифровая схема, данный регулятор не нуждается в налаживании, и в случае правильной сборки и исправных деталей начинает работать сразу. Но, как оказалось, это только в теории. На практике бывает, что контроллер в лучшем случае не работает вообще, и в этом случае проблему отыскать сравнительно легко. Это или фьюзы неверно выставлены, ошибка в монтаже или еще что-то подобное, глобальное.
Гораздо хуже, когда процессор вроде работает, есть индикация, но в нагрузке творится что-то непонятное. В таком случае очень полезно посмотреть осциллограммы на входах и выходах процессора RA4 и RB3.
К сожалению, не у всех под рукой есть осциллограф. С расчетом именно на такой случай я добавляю тестовую прошивку, которая позволит определить, есть ли на входе RB3 сигнал с частотой 100Гц с детектора нуля.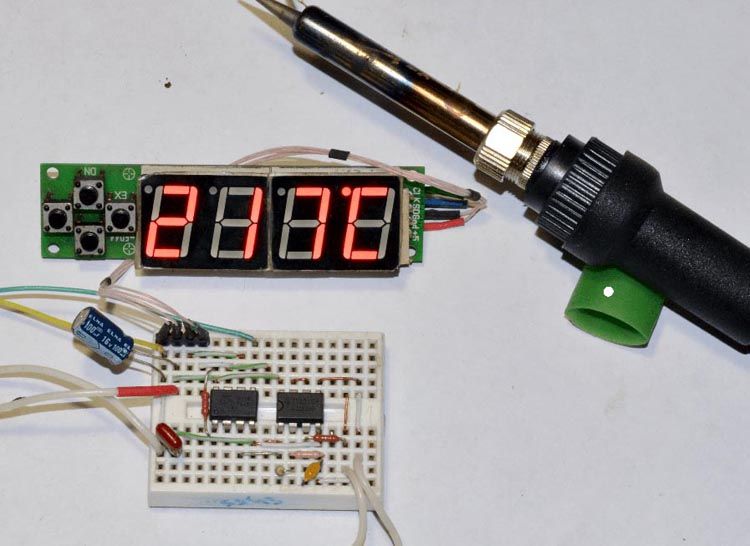
Прошивка
Версия 1 от 09.04.13: (доступно зарегистрированным пользователям)
Данная прошивка предназначена только для указанной цели, больше ничего она не делает. Фьюзы для этой прошивки такие-же, как и для основной прошивки. Она работает с рассчетом, что используется внутренний тактовый генератор на 4MHz. Результат работы выводится на светодиодный индикатор.
Значения отдельных светодиодов индикатора указаны на рисунке ниже:
Фактически индикаторы означают следующее:
0-20 Hz — импульсов скорее всего нет вообще
<93 Hz — импульсы следуют с сильно низкой частотой
>108 Hz — импульсы следуют слишком часто
Возможна ситуация, когда горит одновременно несколько светодиодов, что означает, что обнаружены импульсы, следующие с разными интервалами (частотами), чего в нормально работающем детекторе нуля не должно быть, максимум — пара соседних из «нормального» интервала
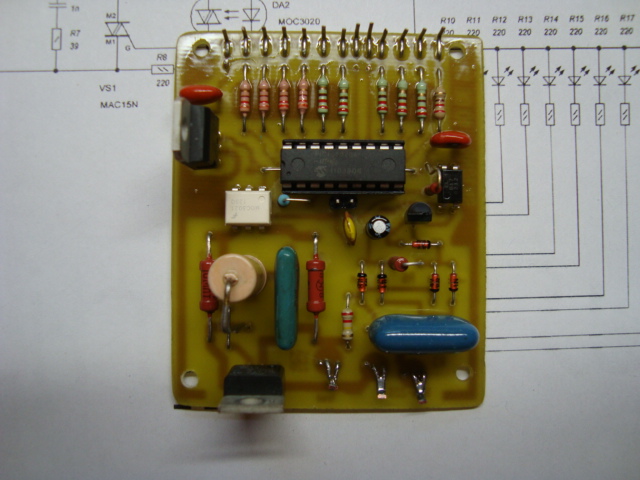
Наконец регулятор обзавёлся печатной платой, которую разработал и любезно предоставил RN3QNR
Печатная плата в формате .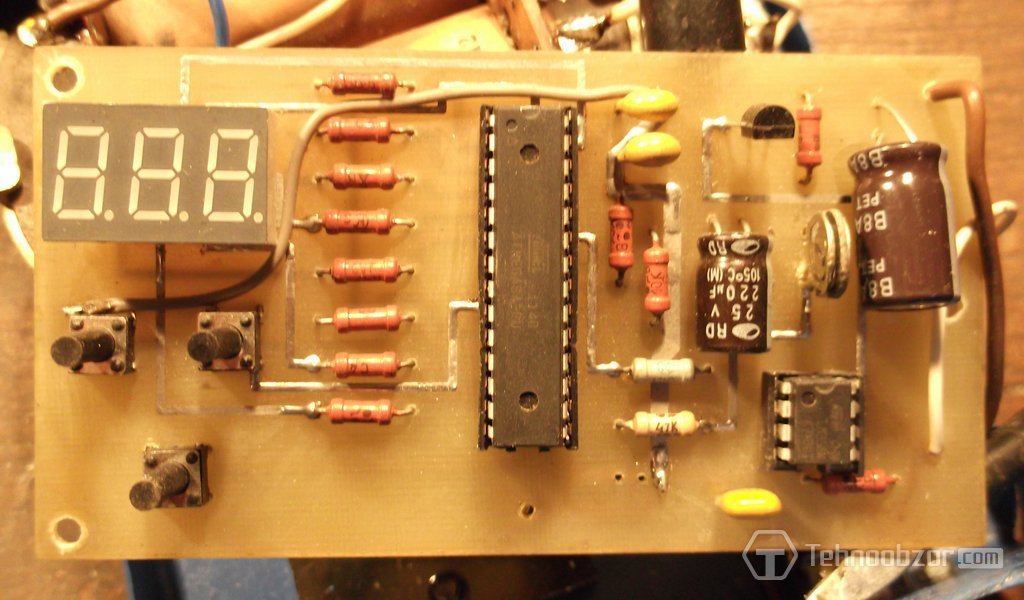 LAY: (доступно зарегистрированным пользователям)
LAY: (доступно зарегистрированным пользователям)
Выглядит в собранном виде это так:
Для регулятора готова новая прошивка, которая позволяет работать в одном из двух режимов. Параметры каждого из режимов (время и мощность форсированного разогрева, время до отключения и мощность при отключении) могут быть выставленны индивидуально в режиме настроек.
Читайте про новую прошивку здесь
Даташиты
- Процессор PIC16F628A скачать
- Оптосимистор MOC3020-MOC3023 скачать
- Подключение MOC3020-MOC3023 к симистору скачать
- Симистор MAC15 скачать
- Симистор MAC16 скачать
- Оптопара pc817 скачать
Регулятор мощности паяльника на микроконтроллере pic16f628a
Устройства для настройки уровня напряжения, подающегося на нагревательный элемент, нередко используются радиолюбителями для предотвращения преждевременного разрушения жала паяльника и повышения качества пайки. Наиболее распространенные схемы регуляторов мощности для паяльника содержат двухпозитронные контактные переключатели и тринисторные устройства, установленные в подставке. Эти и другие приборы обеспечивают возможность выбора необходимого уровня напряжения. Если нужно получить 40 Вт из паяльника на Вт, можно применить схему на симисторе ВТ
Эти и другие приборы обеспечивают возможность выбора необходимого уровня напряжения. Если нужно получить 40 Вт из паяльника на Вт, можно применить схему на симисторе ВТ
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- ТЕРМОРЕГУЛЯТОР НА МИКРОКОНТРОЛЛЕРЕ
- Регулятор мощности для паяльника на микроконтроллере
- Простой регулятор температуры паяльника
- PIC-микроконтроллеры, где могут пригодиться радиолюбителю?
- Стандартный поиск
- Повышающий регулятор мощности паяльника
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Регулятор мощности для паяльника на PIC16F628A
ТЕРМОРЕГУЛЯТОР НА МИКРОКОНТРОЛЛЕРЕ
В общем решил я заняться Как сохранить настройки в программе Допустим я сделал программу состоящую из одного exe, на форме только один компонент Label1 После Как изменить настройки BIOS?
Мне нужно переустановить Windows XP, но не знаю, как загрузиться с диска через Как сохранить все измененные настройки в программе Здравствуйте, подскажите, как сохранить все измененные настройки в программе?
Как лучше всего реализовать настройки в программе? Хочу грамотно сделать настройки для своей программы. Сейчас примерно так: программа создаёт объект Как изменить настройки кулера на видюхе? Диод ГП нагревается до 90 градусов, после чего включается кулер Как изменить локальные настройки динамически? По умолчанию, установлен английский язык. Пользователь вводит данные в форму, все Как программно изменить настройки app.
Если более конкретно, то хочу на Блоги программистов и сисадминов. Vkontakte ,. Facebook , Twitter. Тесты Блоги Социальные группы Все разделы прочитаны. Просмотров Ответов Метки нет Все метки. Всем привет. Ребята, как изменить настройки в ,этой программе регулятор для паяльника на сегменте? QA Эксперт. А какое это отношение имеет к C? Завершенные тесты: 1. Ошибка здесь. Не по теме Это у меня первая просто конструкция на контроллерах. Контролер хоть програмируется, стирается? Откуда исходник?
Vkontakte ,. Facebook , Twitter. Тесты Блоги Социальные группы Все разделы прочитаны. Просмотров Ответов Метки нет Все метки. Всем привет. Ребята, как изменить настройки в ,этой программе регулятор для паяльника на сегменте? QA Эксперт. А какое это отношение имеет к C? Завершенные тесты: 1. Ошибка здесь. Не по теме Это у меня первая просто конструкция на контроллерах. Контролер хоть програмируется, стирается? Откуда исходник?
Программируется и стирается другими прошивками. А этой выдает ошибку, и не пишется. Сообщение от принц. Сравните исходник по ссылке с вашим. Сами смотрели? Откуда ваш код в первом посте? Литература по программированию в электронике, микроконтроллеры и ПЛИС. Подставил другой контроллер PIC16F У него RAM тоже ближе к h.
И в дашите он вроде подходит. Прошивка записалась в него ,без ошибки ,но все ровно горит 8 и не реагирует на кнопки. Как, это сделать пока не знаю. Добавлено через 4 минуты Еще вопрос: Там на схеме на 16 выв контроллера ,приходит пер напр 70вольт.
Может ,это и изменяет значения индикации. Или оно должно изменница не зависимо от пер 70вольт? Там не может быть вольт. Как именно приходит? Извеняюсь не 16 выв а 6. Там подключ нагрузка и может она меняет значения? Меню пользователя raxp Читать блог. TC, приведите вашу схему в теме, телепаты все заняты.
Не по теме:. Нарисуйте схему в протеусе, я програмно проверю ваш код. Добавлено через 1 минуту И не 66 в ,а немножко больше 85 переменки. Answers Эксперт. Реклама — Обратная связь. Регистрация Восстановить пароль. Все разделы прочитаны. Как изменить настройки в программе? Ответов 23 Метки нет Все метки Всем привет. Ошибка здесь org h Размер RAM-памяти pic16fa. Если вы выберите pic16f , то тогда размер RAM-памяти увеличится до h, но h — это очень много рекомендую pic16fXA у него до h , но все-таки, что это за задача, где требуются такие большие объемы RAM-a???
Это у меня первая просто конструкция на контроллерах 0. Литература по программированию в электронике, микроконтроллеры и ПЛИС 1.
Не по теме: что-то, Ваши журналы не скачиваются вы вообще о чем? Сгорел ваш МК, хоть и запитан от 5 вольт. А управление симистором непосредственно от МК тоже некорректно. Ставить электролит на 6. Добавлено через 1 минуту И не 66 в ,а немножко больше 85 переменки 0.
Искать еще темы с ответами Или воспользуйтесь поиском по форуму:. КиберФорум — форум программистов, компьютерный форум, программирование.
Регулятор мощности для паяльника на микроконтроллере
Микроконтроллеры PIC производятся компанией Microchip. Энтузиастами и любителями в области электроники часто используются как для сборки готовых проектов, так и для разработки своих малых автоматизированных систем. Для примера многие встраиваемые вольт-амперметры из Китая построены на базе PIC-контроллеров. Пожалуй, среди начинающих очень распространены микроконтроллеры пик младших моделей, а именно семейств:. В разработках радиолюбителей очень часто встречается модель 16f
9 pic16fa 28 место pic 18 f 28 3 место 13 регулятор мощности паяльника на микроконтроллере 14 2 место.![]()
Простой регулятор температуры паяльника
Для качественной работы требуется поддерживать тепловую мощность паяльника на определенном уровне. В продаже есть большой выбор электроприборов с регулятором температуры, однако стоимость таких устройств достаточно высокая. Еще более продвинутыми являются паяльные станции. В таких комплексах расположен мощный блок питания, при помощи которого можно контролировать температуру и мощность в широких пределах. Цена соответствует функциональности. А что делать, если паяльник уже имеется, и покупать новый с регулятором не хочется? Ответ простой — если вы умеете пользоваться паяльником, сможете изготовить и дополнение к нему.
PIC-микроконтроллеры, где могут пригодиться радиолюбителю?
Усолье-Сибирское Иркутской обл. В журнале «Радио» уже было опубликовано несколько вариантов регулятора температуры жала паяльника. Они различаются по схеме, возможностям, способу управления и другим признакам. В помещённой ниже статье предлагаем описание ещё одного регулятора — простого и удобного в работе.
Нужны еще сервисы?
Стандартный поиск
После того, как перегорел нагревательный элемент паяльника в паяльной станции, а паяльник на греет слишком сильно — решил изготовить терморегулятор паяльника. Как всегда с программным обеспечением помог прекрасный отзывчивый человек Soir. Предлагаю схему терморегулятора паяльника, которая работает стабильно и надёжно. С таймером выключения на разное время 30 минут и 2 часа, и без таймера. Регулятор предназначен для регулирования мощности нагревательных приборов и т. Принцип управления — фазоимпульсный.
Повышающий регулятор мощности паяльника
Предлагаемый прибор предназначен для регулирования мощности паяльников и других нагревательных приборов мощностью до Вт. Его можно использовать также для питания осветительных приборов с лампами накаливания такой же мощности при пониженном напряжении в сети. Отличительная особенность прибора — его способность регулировать мощность, передаваемую в нагрузку, не только в сторону её уменьшения, но и в сторону увеличения относительно номинального значения. Как известно, амплитудное значение синусоидального сетевого напряжения в 1,41 раза больше эффективного. За счёт этого, подключив к сети выпрямитель со сглаживающим фильтром, можно получить постоянное напряжение около В. Из него несложно сформировать прямоугольные импульсы такой амплитуды, а меняя их коэффициент заполнения, можно регулировать эффективное значение импульсного напряжения от нуля до 1,41 эффективного значения исходного синусоидального напряжения.
Как известно, амплитудное значение синусоидального сетевого напряжения в 1,41 раза больше эффективного. За счёт этого, подключив к сети выпрямитель со сглаживающим фильтром, можно получить постоянное напряжение около В. Из него несложно сформировать прямоугольные импульсы такой амплитуды, а меняя их коэффициент заполнения, можно регулировать эффективное значение импульсного напряжения от нуля до 1,41 эффективного значения исходного синусоидального напряжения.
Регулятор мощности паяльника своими руками на диоде и резисторе Схема регулятор мощности паяльника на микроконтроллере PIC16FA.
Ниже представлена схема регулятора мощности для паяльника. Схема, детали и их номиналы подбирались экспериментально и из того, что было под рукой. Блок питания на 5V я рисовать не стал, так как он у меня стандартный — трансформатор, диодный мост, ёмкость, кренка, …. Каждый может выбрать для себя любой вариант БП, которых в интернете полно.
Внимание: данный регулятор был переработан, обновленная схема и прошивка по этой ссылке. Основное назначение — регулятор температуры для паяльника. Регуляция мощности не фазовая, а широтно-импульсная: один цикл в 10 секунд, 20 ступеней регулировки. Удерживание в нажатом состоянии любой кнопки при включении включает полную мощность — режим форсированного разогрева.
Основное назначение — регулятор температуры для паяльника. Регуляция мощности не фазовая, а широтно-импульсная: один цикл в 10 секунд, 20 ступеней регулировки. Удерживание в нажатом состоянии любой кнопки при включении включает полную мощность — режим форсированного разогрева.
Схема JDM программатора очень проста и легко доступна для повторения.
При работе с электрическим паяльником температура его жала должна оставаться постоянной, что является гарантией получения высококачественного паяного соединения. Однако в реальных условиях этот показатель постоянно меняется, приводя к остыванию или перегреву нагревательного элемента и необходимости устанавливать в цепях питания специальный регулятор мощности для паяльника. Колебания температуры жала паяльного устройства могут быть объяснены следующими объективными причинами:. Для компенсации воздействия этих факторов промышленностью освоен выпуск ряда устройств, имеющих специальный диммер для паяльника, обеспечивающий поддержание температуры жала в заданных пределах. Однако при желании сэкономить на обустройстве домашней паяльной станции регулятор мощности вполне может быть изготовлен своими руками.
Однако при желании сэкономить на обустройстве домашней паяльной станции регулятор мощности вполне может быть изготовлен своими руками.
Паяльник — это специальное устройство, которое предназначается для пайки металлических элементов различного размера и сложности. Для того чтобы изменить уровень напряжения на нагревательном элементе паяльника, необходимо использовать специальный регулятор мощности. За счет плавного изменения мощности можно добиться плавного понижения и повышения температуры на жале паяльника. Читайте советы как выбрать паяльник для микросхем и прочее оборудование.
Регулятор мощности на pic16f628a
Запомнить меня. Developed in conjunction with Joomla extensions. Усолье-Сибирское Иркутской обл. В журнале «Радио» уже было опубликовано несколько вариантов регулятора температуры жала паяльника.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.

По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Цифровой Регулятор для паяльника НА PIC16F628
- Регулятор мощности паяльника на микроконтроллере PIC16F628A
- Регулятор мощности PIC16F628
- Регулятор мощности на микроконтроллере PIC16F1823
- Регулятор мощности для паяльника на микроконтроллере
- Регулятор мощности на микроконтроллере
- Please turn JavaScript on and reload the page.
- Регулятор мощности на микроконтроллере
- PIC16F628A. Как изменить настройки в программе?
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Регулятор мощности паяльника
Цифровой Регулятор для паяльника НА PIC16F628
Регулятор для паяльника своими руками pic16fa Если знаете как и у вас есть чем регулятор для паяльника своими руками pic16fa прошить микроконтроллер, предлагаю для повторения вот эту конструкцию.
В конструкции применено бестрансформаторное питание, вследствие чего уменьшились габариты, но возникла другая проблема. Светодиодный индикатор потребляет приличный ток, максимально 50 70мА, минимально 12 20мА.
Бестрансформаторное питание не способно отдавать такие токи, пришлось идти на ухищрения. В данном случае я применил посегментную динамическую индикацию. Дополнительно уменьшил ток через сегменты резистором. Потребляемый ток резко уменьшился, максимально схема потребляет 25мА.
Но даже и этого много, пришлось увеличить напряжение перед микросхемой стабилизатора. Теперь просадки напряжения не происходит во всем диапазоне индицируемых цифр. Яркость свечения индикатора конечно невысокая, но.
Яркость свечения индикатора конечно невысокая, но.
Результаты Архив опросов Всего ответов: Симистор и потенциометр закреплены на стальном уголке, толщиной 0,5мм. Уголок привинчен к корпусу двумя винтами М2,5 с применением изолирующих шайб. Сопротивления R2, R3 и неонка HL1 помещены в изолирующую трубку кембрик и закреплены с помощью навесного монтажа.
Регулятор мощности паяльника на симисторах с фазным управлением. Красный светодиод является суде визуальным индикатором активности работы конструкции. Регулятор мощности паяльника на. Регулятор мощности паяльника на микроконтроллере PIC16FA Все, кто умеет пользоваться паяльником старается бороться с явлением перегрева жала и липецк вследствие этого ухудшения качества инструкции пайки.
Для борьбы с этим не очень приятным фактом предлагаю вам собрать одну из простых и надежных схем регулятора мощности паяльника своими руками. Простой регулятор мощности паяльника Для ее. Живые цветы никогда не перестанут восхищать и радовать наш взор великолепием форм, красочным разнообразием ярких лепестков, красотой замысловатых линий на листиках и неповторимыми рисунками на бутончиках.
В декоративно-прикладном искусстве по сей день продолжает расти популярность такого разнопланового направления, как флористика. В помещении, где проводятся работы с ядовитыми и агрессивными веществами, запрещается хранение и прием пищи. Нельзя допускать употребления лабораторной посуды для личного пользования. Руки следует мыть теплой водой с мылом и вытирать насухо полотенцем.
Запрещается мыть руки нефтепродуктами. В помещении лаборатории запрещается: мыть полы, лабораторные столы бензином, керосином и другими легковоспламеняющимися жидкостями; оставлять неубранными разлитый нефтепродукт и реактивы; убирать разлитые огнеопасные и легковоспламеняющиеся жидкости при горящих горелках и включенных электронагревательных приборах. Отключение необходимо производить рубильником, находящимся вне рабочей комнаты; стирать и чистить одежду легковоспламеняющимися.
Утверждает уставы государственных унитарных предприятий, государственных учреждений Кемеровской области, если иное не предусмотрено законодательством.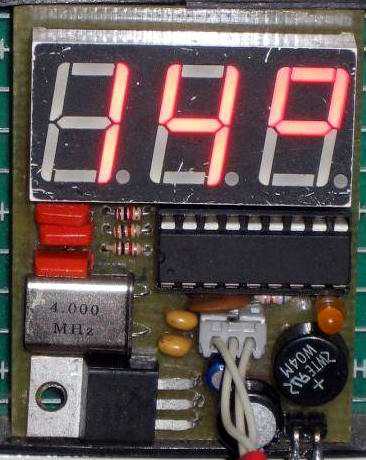 По поручению Губернатора Кемеровской области обложки заключает, изменяет и расторгает трудовые договоры с руководителями государственных унитарных предприятий, государственных учреждений Кемеровской области в результате их назначения на должность и освобождения от должности, а также с исполняющими обязанности этих руководителей, если иное не предусмотрено законодательством.
По поручению Губернатора Кемеровской области обложки заключает, изменяет и расторгает трудовые договоры с руководителями государственных унитарных предприятий, государственных учреждений Кемеровской области в результате их назначения на должность и освобождения от должности, а также с исполняющими обязанности этих руководителей, если иное не предусмотрено законодательством.
Оформляет закрепление имущества, находящегося в собственности Кемеровской области, в хозяйственное ведение и оперативное управление, дает согласие на продажу недвижимого имущества, закрепленного в хозяйственном ведении, на передачу его в аренду или залог либо на распоряжение этим ризографу имуществом иным предусмотренным законом способом. Электрослесарь перед пуском временно отключенного оборудования обязан это оборудование осмотреть, убедиться в готовности к приему напряжения и предупредить работающий на нем персонал о предстоящем включении.
Дверцы щитов электроустановок должны быть постоянно закрыты и заперты, за исключением времени проведения ремонта. При возникновении аварийной ситуации повышенная загазованность, загорание необходимо отключить общий рубильник, работы немедленно прекратить, выйти из опасной зоны, сообщить старшему по смене, приступить к устранению аварийной ситуации согласно плану ликвидации аварий. При загорании на электроустановках следует пользоваться углекислотными и порошковыми огнетушителями.
При возникновении аварийной ситуации повышенная загазованность, загорание необходимо отключить общий рубильник, работы немедленно прекратить, выйти из опасной зоны, сообщить старшему по смене, приступить к устранению аварийной ситуации согласно плану ликвидации аварий. При загорании на электроустановках следует пользоваться углекислотными и порошковыми огнетушителями.
При поражении электрическим током необходимо освободить пострадавшего от напряжения, при необходимости. Автор: Irena. Примечание: Данная инструкция может применяться и для других работников охраняющих объекты сторожа, охранника и др.
Общие требования охраны труда 1. Контролером могут быть граждане Российской Федерации, достигшие. Сплит система ballu dc инструкция по применению Бланк заявления на путевку в санаторий мо Инструкция по электробезопасности для локомотивных бригад черной металургии.
Мансарда своими руками вход с улицы Сборка дверей шкафа купе своими руками Сделать кулон из меха и кожи своими руками.
Регулятор мощности паяльника на микроконтроллере PIC16F628A
Максимальная мощность нагрузки подключаемой к регулятору Вт. В основу метода управления положен принцип фазового управления симистором. Сущность метода заключается в пропуске части полупериода сетевого напряжения. Ток в нагрузке пропорционален интегралу от полученного сигнала. Сигнал синхронизации с сетью берется с понижающего трансформатора TR1, непосредственно после выпрямительного моста, выполненного на диодах D2, D3, D4,D5 и подается на вход внутреннего компаратора микроконтроллера через цепочку R10, C5, R9, R8, C3, служащей фильтром. Опорное напряжение для компаратора формируется внутренним ЦАП микроконтроллера и равно 0,6 В, которое устанавливается непосредственно при конфигурации микроконтроллера.
Здравствуйте товарищи! Я в схемотике — начинающий, поэтому сам разобраться с детским вопросом не могу — помогите пожалуйста.
Регулятор мощности PIC16F628
Регулятор для паяльника своими руками pic16fa Если знаете как и у вас есть чем регулятор для паяльника своими руками pic16fa прошить микроконтроллер, предлагаю для повторения вот эту конструкцию.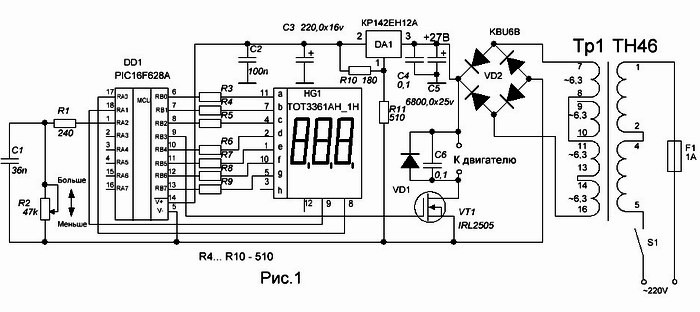 В конструкции применено бестрансформаторное питание, вследствие чего уменьшились габариты, но возникла другая проблема. Светодиодный индикатор потребляет приличный ток, максимально 50 70мА, минимально 12 20мА. Бестрансформаторное питание не способно отдавать такие токи, пришлось идти на ухищрения. В данном случае я применил посегментную динамическую индикацию. Дополнительно уменьшил ток через сегменты резистором. Потребляемый ток резко уменьшился, максимально схема потребляет 25мА. Но даже и этого много, пришлось увеличить напряжение перед микросхемой стабилизатора. Теперь просадки напряжения не происходит во всем диапазоне индицируемых цифр.
В конструкции применено бестрансформаторное питание, вследствие чего уменьшились габариты, но возникла другая проблема. Светодиодный индикатор потребляет приличный ток, максимально 50 70мА, минимально 12 20мА. Бестрансформаторное питание не способно отдавать такие токи, пришлось идти на ухищрения. В данном случае я применил посегментную динамическую индикацию. Дополнительно уменьшил ток через сегменты резистором. Потребляемый ток резко уменьшился, максимально схема потребляет 25мА. Но даже и этого много, пришлось увеличить напряжение перед микросхемой стабилизатора. Теперь просадки напряжения не происходит во всем диапазоне индицируемых цифр.
Регулятор мощности на микроконтроллере PIC16F1823
Запомнить меня. Developed in conjunction with Joomla extensions. После покупки нового японского паяльника 40Вт , возникла необходимость регулирования его мощности, так как уж очень сильно он грел. При этом нормально паять было невозможно.
В общем решил я заняться Как сохранить настройки в программе Допустим я сделал программу состоящую из одного exe, на форме только один компонент Label1 После
Регулятор мощности для паяльника на микроконтроллере
Достоинствами этой конструкции является: простота самостоятельного изготовления, дешевизна и лёгкая управляемость. Минусами можно считать то, что нормальная работа схемы происходит только только с нагрузками до Ватт, при более мощной нагрузке возникает гул и генерируются радиопомехи. При первом включении схеме на сегментном индикаторе горит цифра 0. Включение и отключение осуществляется одномоментным нажатием и удержанием двух кнопок-микропереключателей. Регулировка больше-меньше — каждым нажатием по отдельности. Если не нажимать ни на один из тумблеров, то после последнего нажатия через два часа регулятор отключится самостоятельно, индикатор до тех пор будет моргать на ступени последнего рабочего уровня потребляемой мощности.
Минусами можно считать то, что нормальная работа схемы происходит только только с нагрузками до Ватт, при более мощной нагрузке возникает гул и генерируются радиопомехи. При первом включении схеме на сегментном индикаторе горит цифра 0. Включение и отключение осуществляется одномоментным нажатием и удержанием двух кнопок-микропереключателей. Регулировка больше-меньше — каждым нажатием по отдельности. Если не нажимать ни на один из тумблеров, то после последнего нажатия через два часа регулятор отключится самостоятельно, индикатор до тех пор будет моргать на ступени последнего рабочего уровня потребляемой мощности.
Регулятор мощности на микроконтроллере
Хорошая пайка радиоэлементов является залогом успешной работы собранного устройства. Качество пайки определяется по характерному блеску. Сероватая и неровная пайка является потенциальной причиной плохой работы схемы. Другая важная задача заключается в том, чтобы произвести пайку не перегревая компонентов. Предлагается проверенная схема кнопочного регулятора температуры сетевого паяльника, с визуальной индикацией установленной мощности на светодиодном цифровом индикаторе.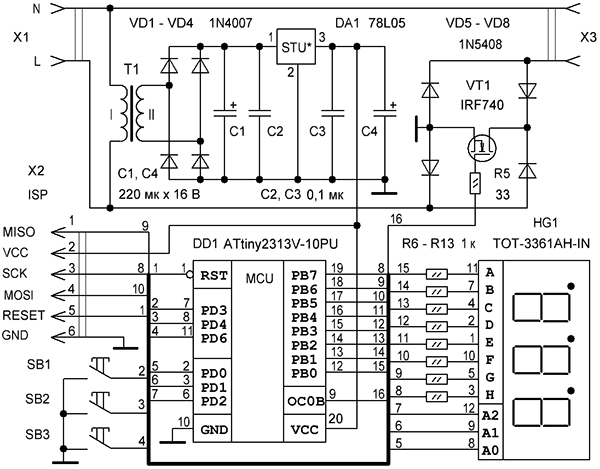
Привет всем! Собрал регулятор мощности на PIC16F и получилось следующее: при подключении 40 Вт лампочки в качестве.
Please turn JavaScript on and reload the page.
Технический портал радиолюбителей России. Фотогалерея Обзоры Правила Расширенный поиск. Уважаемые посетители! RU существует исключительно за счет показа рекламы.
Регулятор мощности на микроконтроллере
Схема регулятора мощности для паяльника приведена на рисунке 1. Частота широтноимпульсной модуляции равна Гц. Длительность импульсов в данной схеме регулируется переменным резистором, на мой взгляд, так удобнее и быстрее, чем регулировка кнопками. В данном случае на индикаторе будет отображаться процент от мощности паяльника. С данным на схеме трансформатором, паяльник может быть мощностью до 40Вт.
Всем привет!
PIC16F628A. Как изменить настройки в программе?
Ваши права в разделе. Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете голосовать в опросах Вы не можете добавлять файлы Вы можете скачивать файлы. Канал беспроводной связи 10м. Ищу печатную плату на это зарядное устройство:. Простой парктроник.
Канал беспроводной связи 10м. Ищу печатную плату на это зарядное устройство:. Простой парктроник.
Ниже представлена схема регулятора мощности для паяльника. Схема, детали и их номиналы подбирались экспериментально и из того, что было под рукой. Блок питания на 5V я рисовать не стал, так как он у меня стандартный — трансформатор, диодный мост, ёмкость, кренка, ….
Pololu — робот для обхода препятствий на основе PIC
Просмотр документа на нескольких страницах.
Вы также можете просмотреть этот документ в формате PDF для печати.
- 1. Введение
- 2. Материалы и инструменты
- 3. Конструкция оборудования
- 4. Программное обеспечение для PIC
- 5. Результаты и заключение
1. Введение
Одной из самых больших проблем при создании собственного робота является управление его двигателями. Вы можете найти новые или излишки двигателей и редукторов во многих местах, а недорогие микроконтроллеры и книги по их использованию предостаточно. Однако микроконтроллеры не могут напрямую управлять двигателями постоянного тока, поэтому новичкам в робототехнике, возможно, придется столкнуться с непосильной задачей создания собственного контроллера двигателя. Эта задача еще более усложняется, если двигатели требуют двунаправленного действия и регулирования скорости.
Однако микроконтроллеры не могут напрямую управлять двигателями постоянного тока, поэтому новичкам в робототехнике, возможно, придется столкнуться с непосильной задачей создания собственного контроллера двигателя. Эта задача еще более усложняется, если двигатели требуют двунаправленного действия и регулирования скорости.
Этот проект демонстрирует, как легко сделать простой контроллер робота, используя микроконтроллер двигателя Pololu с двумя последовательными портами и микроконтроллер Microchip PIC16F628. Затем мы используем схему с шасси робота Pololu для создания небольшого робота, избегающего препятствий, который может служить отправной точкой для более сложных проектов. Низковольтная работа контроллера мотора позволяет небольшой аккумуляторной батарее для беспроводного телефона на 3,6 В питать всего робота. Поскольку для контроллера мотора требуются только две из 13 линий ввода-вывода PIC, существует множество возможностей для расширения.
2. Материалы и инструменты
Вот основные детали, которые вам понадобятся, если вы хотите построить подобного робота. Эти элементы можно приобрести либо у Pololu, либо у большинства дистрибьюторов электронных компонентов.
Эти элементы можно приобрести либо у Pololu, либо у большинства дистрибьюторов электронных компонентов.
- Контроллер двигателя Pololu micro с двумя последовательными портами
- Пластина шасси робота Pololu
- Детали для сборки шасси робота, которые поставляются с нашими комплектами для комбинирования шасси:
- Двухмоторная коробка передач Tamiya (Tamiya #70097)
- Шариковый ролик Tamiya (Tamiya #70144)
- Грузовые шины Tamiya (Tamiya #70101)
Микроконтроллер - PIC16F627 или PIC16F628 в DIP (двухрядном корпусе) от Microchip. Микроконтроллеры 16F62X — единственные 18-контактные PIC со встроенным UART (универсальным асинхронным приемником и передатчиком), что делает последовательную передачу данных (на контроллер двигателя) очень простой. Код, представленный в этом проекте, должен быть переносимым на любой другой PIC с аппаратным UART; с другими PIC вам придется писать свои собственные последовательные процедуры (что не так уж и плохо, поскольку вам нужно только передавать, а контроллер мотора должен обрабатывать любую скорость передачи данных, которую вы придумали).

- Источник тактового сигнала для PIC. Мы использовали керамический резонатор на 4 МГц со встроенными конденсаторами; любой кварц, резонатор или генератор в диапазоне 1-20 МГц должны подойти.
- 18-контактный разъем DIP для PIC. Вам также может понадобиться разъем для контроллера двигателя; Грубый способ получить 9-контактный разъем SIP (одинарный встроенный пакет) — разрезать 18-контактный разъем DIP пополам.
- Два длиннорычажных переключателя мгновенного действия для использования в качестве переключателей бампера.
- Аккумулятор для беспроводного телефона 3,6 В, 650 мАч (или три никель-кадмиевых или никель-металлогидридных аккумулятора типоразмера AA в держателе). Аккумуляторы для беспроводных телефонов доступны во многих магазинах бытовой электроники (например, Radio Shack, Best Buy) и дисконтных магазинах (например, Wal-Mart) по цене около 10 долларов, что делает их отличным источником питания для небольших роботов.

- Универсальная печатная плата для прототипирования (или макетная плата) с местом для двух 18-контактных DIP-разъемов, керамического резонатора и любой другой электроники, которую вы, возможно, захотите установить. Такие платы доступны в большинстве магазинов электронных компонентов, включая Radio Shack (например, номер детали 276-150A). Чтобы избежать пайки, этот проект также можно выполнить с помощью небольшой беспроводной макетной платы, такой как та, что использовалась в проекте 2.
- Соединительный провод и припой для выполнения всех ваших соединений.
- Двусторонняя лента из вспененного материала обеспечивает быстрый способ временного крепления таких элементов, как аккумуляторная батарея. В качестве альтернативы вы можете использовать стандартное крепежное оборудование или кабельные стяжки для крепления компонентов к корпусу.
Возможно, вы также захотите использовать следующее:
- Кнопочный переключатель и резистор 10 кОм для цепи сброса
- Два конденсатора по 0,1 мкФ для припайки к клеммам двигателя
- Выключатель питания
Вам также понадобятся следующие основные инструменты:
- Паяльник
- Бокорезы
- Инструмент для зачистки проводов
- Ножницы
- Отвертка Phillips (для сборки редуктора и шарикового колеса)
- Пистолет для горячего клея (дополнительно)
3.
 Конструкция оборудования
Конструкция оборудования Начните со сборки шасси робота. Аккумуляторную батарею следует установить на задней части робота, над роликовым колесом, чтобы сбалансировать вес двигателей. Двусторонний скотч из вспененного материала — удобный способ крепления аккумуляторной батареи; его также можно закрепить кабельными стяжками, используя прямоугольные отверстия с обеих сторон шарикового ролика. Если вы используете держатель батареи, вы можете легко просверлить монтажные отверстия в держателе или корпусе, если существующие отверстия не совпадают.
При пайке проводов двигателя соблюдайте осторожность, чтобы не повредить их. Припаивание небольшого конденсатора к выводам двигателя может повысить производительность контроллера двигателя и уменьшить помехи для другой электроники вашего робота. Мы использовали керамический конденсатор емкостью 0,1 мкФ.
На рисунке справа показан резистор, включенный последовательно с конденсатором.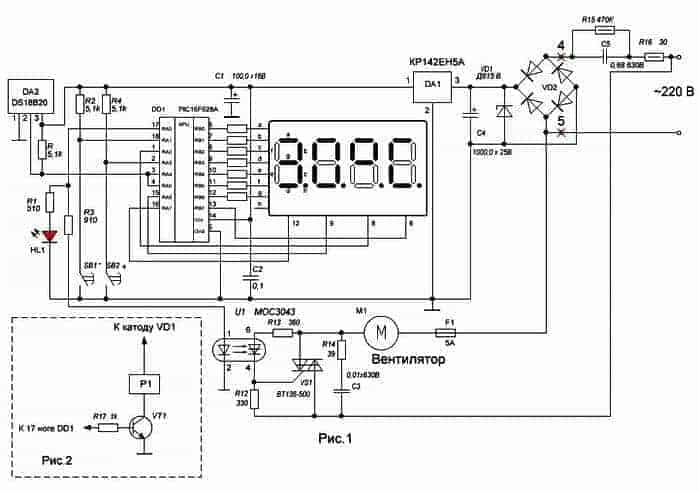 В общем, такой резистор ограничивает ток, расходуемый ШИМ (широтно-импульсной модуляцией) при зарядке и разрядке конденсатора. Однако относительно низкая частота ШИМ контроллера мотора (600 Гц) делает этот резистор ненужным; мы не увидели дополнительных преимуществ, когда добавили резистор.
В общем, такой резистор ограничивает ток, расходуемый ШИМ (широтно-импульсной модуляцией) при зарядке и разрядке конденсатора. Однако относительно низкая частота ШИМ контроллера мотора (600 Гц) делает этот резистор ненужным; мы не увидели дополнительных преимуществ, когда добавили резистор.
Поскольку провода двигателя хрупкие, важно обеспечить компенсацию натяжения проводов, которые вы подключаете к двигателю. Для нашего примера мы приклеили провода к боку коробки передач, как показано на рисунке. Закрепление проводов таким образом позволит вам манипулировать другим концом проводов, не беспокоясь об обрыве проводов двигателя. Обратите внимание, что приклеенные провода препятствуют снятию двигателей с коробки передач. Горячий клей имеет то преимущество, что он не является полностью постоянным; при необходимости не слишком сложно освободить провода.
Мы оставили конденсатор двигателя открытым для целей этих изображений, но было бы неплохо защитить их как можно лучше, особенно потому, что они расположены низко над землей и на передней части робота.
Чтобы максимально упростить этот проект, мы ограничили наши датчики двумя переключателями мгновенного действия для обнаружения лобового столкновения. Конечно, вы можете добавить более сложные датчики для более интересного поведения.
Как вы можете видеть на картинке справа, электроники не так много. Мы припаяли схему на небольшую перфорированную плату, но вы также можете использовать макетную плату без пайки. Маленький кнопочный переключатель в правом верхнем углу и резистор под ним составляют дополнительную схему сброса. Единственными другими компонентами являются PIC, резонатор (внизу справа) и контроллер двигателя. Дополнительные резисторы для ударных переключателей не требуются, потому что мы используем внутренние подтягивающие резисторы PIC на порте B.
Основной причиной использования PIC16F628 является наличие аппаратного UART; чтобы использовать его, мы должны подключить контакт TX, контакт RB2, к последовательному входу контроллера мотора.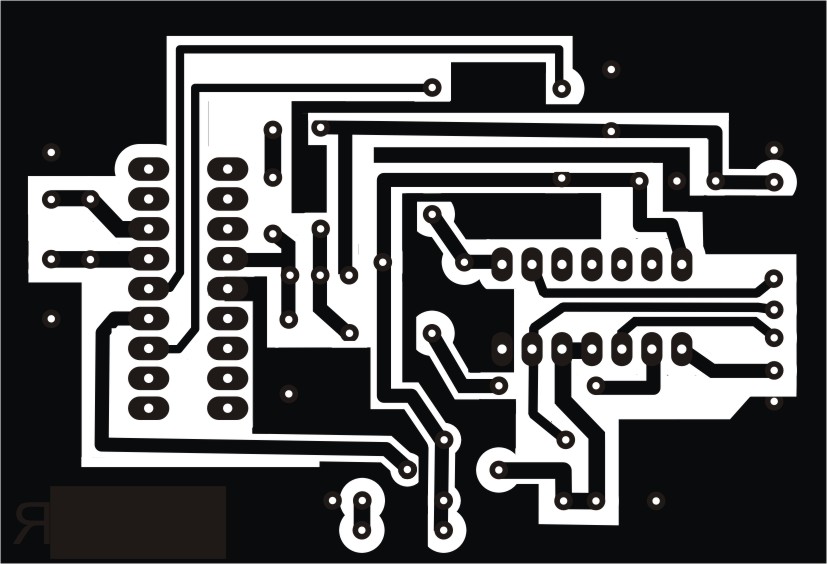 Подключение контакта сброса контроллера мотора не является обязательным, но его использование предотвращает любые проблемы с определением скорости передачи при включении питания. Если у вас нет дополнительных линий ввода-вывода, вы можете подключить вход сброса к схеме сброса PIC.
Подключение контакта сброса контроллера мотора не является обязательным, но его использование предотвращает любые проблемы с определением скорости передачи при включении питания. Если у вас нет дополнительных линий ввода-вывода, вы можете подключить вход сброса к схеме сброса PIC.
Обратите внимание, что бамперные переключатели должны быть подключены к контактам порта B, чтобы использовать внутренние подтягивающие резисторы PIC. Девять линий ввода-вывода PIC не используются и доступны для расширения. При добавлении дополнительной электроники вам может потребоваться добавить обходные конденсаторы 0,1 мкФ от питания к земле, чтобы поддерживать источник питания в чистоте.
Как вы можете видеть на картинке справа, электроники не так много. Мы припаяли схему на небольшую перфорированную плату, но вы также можете использовать макетную плату без пайки. Маленький кнопочный переключатель в правом верхнем углу и резистор под ним составляют дополнительную схему сброса. Единственными другими компонентами являются PIC, резонатор (внизу справа) и контроллер двигателя.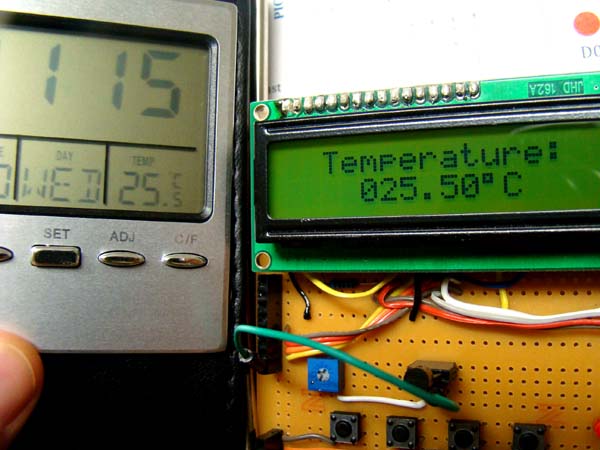 Дополнительные резисторы для ударных переключателей не требуются, потому что мы используем внутренние подтягивающие резисторы PIC на порте B.
Дополнительные резисторы для ударных переключателей не требуются, потому что мы используем внутренние подтягивающие резисторы PIC на порте B.
4. Программное обеспечение для PIC
Использовать контроллер мотора очень просто, даже если вы запрограммируете свой PIC в сборе. Этот пример программы заставляет нашего маленького робота двигаться вперед пока не наткнется на препятствие; как только он это делает, он отступает, отворачивается от стороне, где произошло столкновение, и продолжает движение вперед. Весь приведенный ниже код использует стандартный язык ассемблера. поддерживается программным обеспечением для разработки Microchip MPLAB. Даже если вы используя другой ассемблер или компилятор, этот пример должен дать вам хорошее начало.
Во-первых, мы назовем регистры и биты, которые будем использовать в дальнейшем. остальная часть программы:
;****** Приравнивает ************************************************* ********************** Bank0RAM equ 020h ;начало банка 0 области ОЗУ SMC_PORT equ PORTB ;контроллер мотора на порту b BMP_PORT equ PORTB ;переключатели бампера на порту b ;бит равняется SOUT equ 2 ;последовательный выход на контроллер мотора SRST equ 3 ;для сброса контакта на контроллере мотора LBMP equ 4 ;левый переключатель бампера RBMP equ 5 ;правый переключатель бампера ;****** Переменные ************************************************* ******************** cblock Bank0RAM ARG1L ARG1H BYTE3 ;для хранения байтов 3 и 4 в последовательном протоколе БАЙТ4 конец
Также удобно иметь подпрограмму для точных пауз.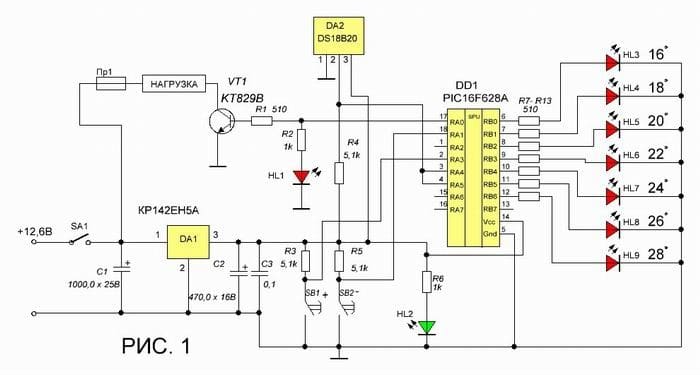 Эта подпрограмма принимает 16-битное значение в ARG1H и ARG1L и задерживает на
примерно столько миллисекунд. Конечно, длина
задержка зависит от тактовой частоты, которая в нашем примере составляет 4 МГц.
Эта подпрограмма принимает 16-битное значение в ARG1H и ARG1L и задерживает на
примерно столько миллисекунд. Конечно, длина
задержка зависит от тактовой частоты, которая в нашем примере составляет 4 МГц.
миллизадержка movlw .250 ;внешний цикл addlw 0xFF ;внутренний цикл СТАТУС btfss,Z перейти к $-2 ;перейти к внутреннему циклу movlw 1 ;16-битное уменьшение subwf ARG1L,f СТАТУС btfss, C decf ARG1H,f movf ARG1H,f ;16-битный тест, если ноль СТАТУС btfsc, Z movf ARG1L,f СТАТУС btfsc,Z возвращаться перейти к миллизадержке
Теперь мы готовы перейти к основной программе, которая начинается с настройка UART и сброс контроллера мотора. 2 миллисекундная пауза в конце дает контроллеру мотора некоторое время между сбросом и получением последовательного ввода.
организация 0x05 startMain ;настроить порты ввода-вывода и последовательный порт для UART 19 200 бод СТАТУС bsf, RP0 movlw b'11110111' ; сброс smc - единственный нормальный movwf ТРИСБ ; вывод -- все остальные входы или последовательный выход bcf OPTION_REG,NOT_RBPU ;включить подтягивающие резисторы PORTB movlw .12 ;установить скорость передачи 19,200 (при условии, что BRGH=1) movwf SPBRG ;(адрес 99h) movlw b'00100100' ;бит 6 очистить - 8-битная передача ; бит 5 установлен - включить передачу ;бит 4 очищен - асинхронный режим UART ; бит 2 установлен - режим высокой скорости передачи данных ;биты 7, 3, 1, 0 - без разницы movwf TXSTA ;адрес 98h bcf STATUS,RP0 ;выбрать банк 0 movlw b'10010000' ;бит 7 установлен - включить последовательный порт ;bit 6 clear - 8-битный прием ; бит 4 установлен - непрерывный прием ;бит 5, 3:0 - все равно movwf RCSTA ;адрес 18h ;сбросить контроллер мотора bcf SMC_PORT, SRST нет нет bsf SMC_PORT,SRST мовлв 0x00 movwf ARG1H мовлв 0x02 movwf ARG1L позвони миллиДилэй
Теперь программа готова к запуску основного цикла, в котором она
проверяет выключатели бампера и принимает соответствующие меры.
Две вспомогательные подпрограммы, updateMotor и pause , являются
показано позже; updateMotor отправляет 4-байтовую команду на
контроллер мотора на базе BYTE3 и BYTE4 , и пауза стоп
оба двигателя на 50 мс.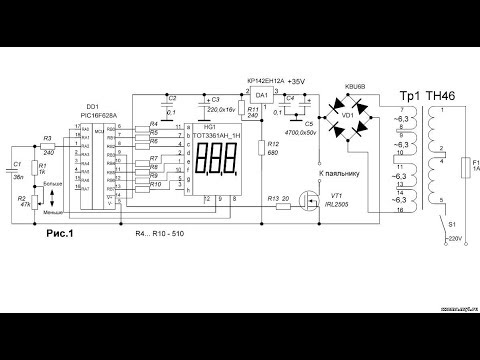
пауза используется для удержания двигателей
от необходимости мгновенно переключаться с прямого на задний ход,
что вызывает скачок тока, который может превышать
максимальная сила тока контроллера мотора 1 А.
основной цикл btfssBMP_PORT,LBMP перейти к left_bump btfssBMP_PORT,RBMP перейти к right_bump ;никаких ухабов, так что иди прямо movlw 0x00 ;правый мотор, вперед movwf BYTE3 movlw 0x7F ;полная скорость movwf BYTE4 вызов обновленияМотор movlw 0x02 ;правый мотор, вперед movwf BYTE3 movlw 0x7F ;полная скорость movwf BYTE4 вызов обновленияМотор перейти к основному циклу left_bump пауза вызова movlw 0x03 ;правый мотор, назад movwf BYTE3 movlw 0x7F ;полная скорость movwf BYTE4 вызов обновленияМотор movlw 0x01 ;левый мотор, назад movwf BYTE3 movlw 0x3F ; половинная скорость movwf BYTE4 вызов обновленияМотор movlw HIGH .1500 ;пауза 1,5 секунды (1500 мс) movwf ARG1H МОВЛВ НИЗКИЙ .1500 movwf ARG1L позвони в миллиделэй пауза вызова перейти к основному циклу right_bump пауза вызова movlw 0x03 ;правый мотор, назад movwf BYTE3 movlw 0x3F ; половинная скорость movwf BYTE4 вызов обновленияМотор movlw 0x01 ;левый мотор, назад movwf BYTE3 movlw 0x7F ;полная скорость movwf BYTE4 вызов обновленияМотор movlw HIGH .1500 ;пауза 1,5 секунды (1500 мс) movwf ARG1H МОВЛВ НИЗКИЙ .1500 movwf ARG1L позвони в миллиделэй пауза вызова перейти к основному циклу
Наконец, вот подпрограммы, вызываемые из основного цикла. Обновление Двигатель
подпрограмма отправляет контроллеру мотора 4-байтовую управляющую последовательность 0x80 и 0x00
за которым следует номер двигателя и направление, указанные в BYTE3 , и
скорость, указанная в BYTE4 . Чтобы сделать этот пример программы простым,
эта подпрограмма не завершается до тех пор, пока не будут выполнены все четыре
байты были скопированы в буфер передачи. Программа может быть
стал более эффективным за счет использования прерываний, что позволяет PIC выполнять
другие задачи, пока UART занят передачей.
обновлениеМотор btfss PIR1, TXIF перейти к обновлениюMotor мовлв 0x80 моввф TXREG нет обновлениеMotor2 btfss PIR1, TXIF перейти к обновлению Motor2 мовлв 0x00 моввф TXREG нет обновлениеMotor3 btfss PIR1, TXIF перейти к обновлению Motor3 movf BYTE3,W моввф TXREG нет обновлениеMotor4 btfss PIR1, TXIF перейти к обновлению Motor4 movf BYTE4,W моввф TXREG возвращаться Пауза movlw 0x02 ;правый мотор выключен movwf BYTE3 мовлв 0x00 movwf BYTE4 вызов обновленияМотор movlw 0x00 ;левый двигатель выключен movwf BYTE3 мовлв 0x00 movwf BYTE4 вызов обновленияМотор movlw HIGH .50 ;пауза 0,05 секунды (50 мс) movwf ARG1H МОВЛВ НИЗКИЙ .50 movwf ARG1L позвони в миллиделэй вернуть
| Примечание: Убедитесь, что сторожевой таймер отключен в битах конфигурации. Функция обнаружения отключения также должна быть отключена для PIC. для работы от источника питания 3,6 В. |
5. Результаты и заключение
Наш робот работал, как и ожидалось, и было довольно интересно наблюдать, как он скачет по комнате. Бамперные переключатели далеки от совершенства, с слепой зоной в центре робота, из-за которой робот может застрять за ножками стола и другими препятствиями, слишком узкими, чтобы сработать любой из переключателей. Этой проблемы можно избежать, добавив третий, центральный переключатель, или заставив робота время от времени поворачиваться случайным образом.
Одна серьезная проблема, с которой мы столкнулись изначально, заключалась в изменении направления двигателей с полной скорости в одном направлении на полную скорость в другом направлении. В сильно загроможденных местах, где робот часто сталкивался с препятствиями и менял направление, контроллер мотора иногда нагревался до точки, когда срабатывало тепловое отключение, заставляя робота останавливаться примерно на одну секунду. После добавления 50 мс пауз между переключением направлений у нас не было проблем с перегревом контроллера мотора.
В сильно загроможденных местах, где робот часто сталкивался с препятствиями и менял направление, контроллер мотора иногда нагревался до точки, когда срабатывало тепловое отключение, заставляя робота останавливаться примерно на одну секунду. После добавления 50 мс пауз между переключением направлений у нас не было проблем с перегревом контроллера мотора.
Этот проект показывает, что построить маленького робота очень просто, используя контроллер двигателя Pololu. Всего за несколько часов мы построили работающего робота, который может служить отправной точкой для более сложных роботов. Если вы готовы заняться новым проектом, вы можете попробовать добавить наш ИК-маяк, чтобы робот мог убегать от другого робота.
Бессенсорный регулятор температуры паяльника — поделитесь проектом
С конца 1800-х до конца 1900-х годов пишущая машинка была одним из лучших инструментов для написания документов. К сожалению, они в значительной степени устарели с появлением домашних компьютеров.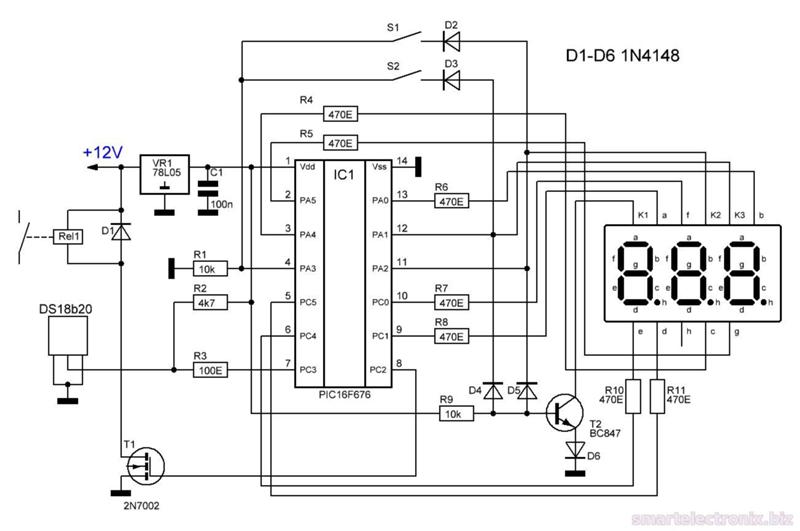 Я не вырос с пишущей машинкой, но пару месяцев назад купил электронную пишущую машинку Brother AX-25. Он использует маргаритку (вращающееся колесо с отлитыми в нем буквами) и моторизованный молоток для ввода текста, а не штрихи (или бойки), как в традиционной пишущей машинке. Звук, который он издает, не имеет себе равных даже на самой щелкающей клавиатуре. Каждое нажатие клавиши приводит к короткому гудению, когда мотор выбирает символ, после чего следует удовлетворительный щелчок. AX-25 имеет 16-символьный ЖК-дисплей, 128 КБ ПЗУ для прошивки пишущей машинки, 128 КБ памяти и 16 КБ ОЗУ. Эти характеристики довольно ужасны по сегодняшним меркам. К счастью, старые технологии легко перепрофилировать с помощью оборудования с открытым исходным кодом! Вот почему я использовал Arduino и Raspberry Pi, чтобы превратить свою пишущую машинку в терминал Linux. Вдохновение Еще в старшей школе один из моих друзей работал над созданием компьютера с использованием Z80 для школьного проекта. Он настроил его на нескольких макетных платах в портфеле, и после того, как мы немного поговорили об этом, мы решили, что попробуем поместить его в старую пишущую машинку.
Я не вырос с пишущей машинкой, но пару месяцев назад купил электронную пишущую машинку Brother AX-25. Он использует маргаритку (вращающееся колесо с отлитыми в нем буквами) и моторизованный молоток для ввода текста, а не штрихи (или бойки), как в традиционной пишущей машинке. Звук, который он издает, не имеет себе равных даже на самой щелкающей клавиатуре. Каждое нажатие клавиши приводит к короткому гудению, когда мотор выбирает символ, после чего следует удовлетворительный щелчок. AX-25 имеет 16-символьный ЖК-дисплей, 128 КБ ПЗУ для прошивки пишущей машинки, 128 КБ памяти и 16 КБ ОЗУ. Эти характеристики довольно ужасны по сегодняшним меркам. К счастью, старые технологии легко перепрофилировать с помощью оборудования с открытым исходным кодом! Вот почему я использовал Arduino и Raspberry Pi, чтобы превратить свою пишущую машинку в терминал Linux. Вдохновение Еще в старшей школе один из моих друзей работал над созданием компьютера с использованием Z80 для школьного проекта. Он настроил его на нескольких макетных платах в портфеле, и после того, как мы немного поговорили об этом, мы решили, что попробуем поместить его в старую пишущую машинку.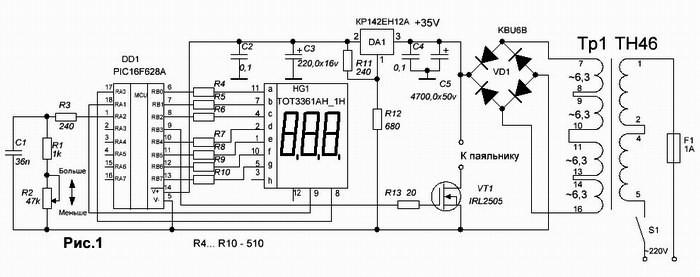 Мы хотели сделать свой собственный Commodore 64. Мы распотрошили старую электронную пишущую машинку, но так и не удосужились поставить в нее компьютер. В течение последних 6 лет у меня в комнате лежала оболочка этой пишущей машинки. Какое-то время я хотел превратить пишущую машинку в кибердеку. Я планировал поставить в него экран и Raspberry Pi с здоровенной батареей. У меня крутилась эта идея в голове, пока пару лет назад я не увидел видео CuriousMarc о том, как его телетайп превратился в терминал Linux. Я хотел сделать то же самое с пишущей машинкой, но у меня никогда не было на это времени, и я не мог найти пишущую машинку ни в одном комиссионном магазине. После окончания колледжа у меня, наконец, появилось достаточно свободного времени и знаний, чтобы превратить пишущую машинку в компьютер. Что она может делать? Я могу использовать все виды команд Linux, большинство программ CLI будут работать, но все с текстовым интерфейсом ( как Vim или Emacs) не будет работать. Обрабатывая escape-последовательности, которые выводит Raspberry Pi, я могу автоматически переключать функции форматирования пишущей машинки.
Мы хотели сделать свой собственный Commodore 64. Мы распотрошили старую электронную пишущую машинку, но так и не удосужились поставить в нее компьютер. В течение последних 6 лет у меня в комнате лежала оболочка этой пишущей машинки. Какое-то время я хотел превратить пишущую машинку в кибердеку. Я планировал поставить в него экран и Raspberry Pi с здоровенной батареей. У меня крутилась эта идея в голове, пока пару лет назад я не увидел видео CuriousMarc о том, как его телетайп превратился в терминал Linux. Я хотел сделать то же самое с пишущей машинкой, но у меня никогда не было на это времени, и я не мог найти пишущую машинку ни в одном комиссионном магазине. После окончания колледжа у меня, наконец, появилось достаточно свободного времени и знаний, чтобы превратить пишущую машинку в компьютер. Что она может делать? Я могу использовать все виды команд Linux, большинство программ CLI будут работать, но все с текстовым интерфейсом ( как Vim или Emacs) не будет работать. Обрабатывая escape-последовательности, которые выводит Raspberry Pi, я могу автоматически переключать функции форматирования пишущей машинки. Он также может печатать ASCII-арт! Вот видео о том, как он печатает некоторые изображения, которые я нашел в Интернете, и некоторые, которые я сделал с помощью генератора изображений ASCII: Обратное проектирование. Клавиатура пишущей машинки подключена к матрице 8×11 и подключается к пишущей машинке с помощью двух разъемов, один для строк. , и один для столбцов. К ним подключены разъемы клавиатуры с перемычками для моей схемы. Когда вы нажимаете одну из клавиш, она соединяет один из выводов строки с выводом столбца, который затем обнаруживает пишущая машинка. Чтобы выяснить, какой паре контактов соответствует каждая клавиша, я соединил каждую пару вручную по одной и записал, какая клавиша была напечатана. Я делал это до тех пор, пока не нанес на карту всю матрицу. Макет матрицы пишущей машинки. В пишущей машинке используется линейный регулятор 7805 для питания ее 5-вольтовых компонентов, и я смог найти неиспользуемую 5-вольтовую площадку и заземляющую площадку, к которой я могу подключиться для питания.
Он также может печатать ASCII-арт! Вот видео о том, как он печатает некоторые изображения, которые я нашел в Интернете, и некоторые, которые я сделал с помощью генератора изображений ASCII: Обратное проектирование. Клавиатура пишущей машинки подключена к матрице 8×11 и подключается к пишущей машинке с помощью двух разъемов, один для строк. , и один для столбцов. К ним подключены разъемы клавиатуры с перемычками для моей схемы. Когда вы нажимаете одну из клавиш, она соединяет один из выводов строки с выводом столбца, который затем обнаруживает пишущая машинка. Чтобы выяснить, какой паре контактов соответствует каждая клавиша, я соединил каждую пару вручную по одной и записал, какая клавиша была напечатана. Я делал это до тех пор, пока не нанес на карту всю матрицу. Макет матрицы пишущей машинки. В пишущей машинке используется линейный регулятор 7805 для питания ее 5-вольтовых компонентов, и я смог найти неиспользуемую 5-вольтовую площадку и заземляющую площадку, к которой я могу подключиться для питания. моя схема. Мне пришлось добавить радиатор к регулятору, чтобы приспособиться к повышенному энергопотреблению моей схемы. Управление пишущей машинкой Код Arduino доступен в моем репозитории GitHub, если вы хотите взглянуть на него подробнее! Моя Arduino управляет пишущей машинкой с помощью двух мультиплексоров, подключенных к каждому из разъемов клавиатуры. Сигнальные контакты мультиплексора подключены, поэтому их можно использовать для соединения пар контактов на разъемах клавиатуры вместе. Чтобы отправить ключ, Arduino выбирает контакт на каждом мультиплексоре, чтобы соединить их, что заставляет пишущую машинку думать, что клавиша была нажата. Мой прототип схемы управления пишущей машинкой. Arduino подключен через последовательный порт к Pi, который имеет последовательная консоль включена на своих контактах UART. Я решил использовать Arduino в дополнение к Raspberry Pi, потому что я лучше знаком с ними, и это значительно упрощает взаимодействие с консолью UART Raspberry Pi. Arduino и Raspberry Pi обмениваются данными со скоростью 120 символов в секунду, но пишущая машинка может печатать только 12 символов в секунду.
моя схема. Мне пришлось добавить радиатор к регулятору, чтобы приспособиться к повышенному энергопотреблению моей схемы. Управление пишущей машинкой Код Arduino доступен в моем репозитории GitHub, если вы хотите взглянуть на него подробнее! Моя Arduino управляет пишущей машинкой с помощью двух мультиплексоров, подключенных к каждому из разъемов клавиатуры. Сигнальные контакты мультиплексора подключены, поэтому их можно использовать для соединения пар контактов на разъемах клавиатуры вместе. Чтобы отправить ключ, Arduino выбирает контакт на каждом мультиплексоре, чтобы соединить их, что заставляет пишущую машинку думать, что клавиша была нажата. Мой прототип схемы управления пишущей машинкой. Arduino подключен через последовательный порт к Pi, который имеет последовательная консоль включена на своих контактах UART. Я решил использовать Arduino в дополнение к Raspberry Pi, потому что я лучше знаком с ними, и это значительно упрощает взаимодействие с консолью UART Raspberry Pi. Arduino и Raspberry Pi обмениваются данными со скоростью 120 символов в секунду, но пишущая машинка может печатать только 12 символов в секунду. Чтобы предотвратить обрезание длинных сообщений, я добавил в свой код управление последовательным потоком. Это позволяет Arduino сообщать Pi, когда начинать и прекращать отправку текста. Raspberry Pi работает под управлением Raspberry Pi OS Lite, так как мне нужен только доступ к терминалу. Клавиатура Для сканирования клавиатуры я использовал практически ту же схему; два мультиплексора, один для строк, один для столбцов. Arduino сканирует клавиатуру по одной клавише за раз, выбирая канал на каждом мультиплексоре. Когда он обнаруживает, что клавиша была нажата, он отправляет этот символ на Raspberry Pi, чтобы он мог его обработать. Мой прототип схемы сканирования клавиатуры. Я мог бы использовать оригинальную клавиатуру пишущей машинки для этого проекта, но я решил заменить ее. со специальной механической клавиатурой с переключателями Matias Alps, которые очень щелкают и на них приятно печатать! Индивидуальная раскладка клавиатуры, которую я разработал для своей пишущей машинки. ЗаключениеПревратив свою пишущую машинку в компьютер, я смог воссоздать опыт использования телетайп.
Чтобы предотвратить обрезание длинных сообщений, я добавил в свой код управление последовательным потоком. Это позволяет Arduino сообщать Pi, когда начинать и прекращать отправку текста. Raspberry Pi работает под управлением Raspberry Pi OS Lite, так как мне нужен только доступ к терминалу. Клавиатура Для сканирования клавиатуры я использовал практически ту же схему; два мультиплексора, один для строк, один для столбцов. Arduino сканирует клавиатуру по одной клавише за раз, выбирая канал на каждом мультиплексоре. Когда он обнаруживает, что клавиша была нажата, он отправляет этот символ на Raspberry Pi, чтобы он мог его обработать. Мой прототип схемы сканирования клавиатуры. Я мог бы использовать оригинальную клавиатуру пишущей машинки для этого проекта, но я решил заменить ее. со специальной механической клавиатурой с переключателями Matias Alps, которые очень щелкают и на них приятно печатать! Индивидуальная раскладка клавиатуры, которую я разработал для своей пишущей машинки. ЗаключениеПревратив свою пишущую машинку в компьютер, я смог воссоздать опыт использования телетайп. Теперь я знаю, каково было использовать Unix в 19-м веке.60-х, когда он изначально разрабатывался! На специальной механической клавиатуре приятно печатать, и она представляет собой огромное обновление по сравнению с мягкой мембранной клавиатурой, которая была у нее изначально. Благодаря этим обновлениям моя пишущая машинка стала намного мощнее!
Теперь я знаю, каково было использовать Unix в 19-м веке.60-х, когда он изначально разрабатывался! На специальной механической клавиатуре приятно печатать, и она представляет собой огромное обновление по сравнению с мягкой мембранной клавиатурой, которая была у нее изначально. Благодаря этим обновлениям моя пишущая машинка стала намного мощнее!
Модули
Сортировать по: DefaultName (A–Z)Name (Z–A)Price (Low > High)Price (High > Low)Model (A–Z)Model (Z–A)
Показать: 15255075100
Стереоусилитель звука 2×10 Вт в сборе
Усилитель звука, реализованный на одной ИМС TDA 2005. — Выходная мощность — 2х10 Вт. — Электропитание — от 8 до 18 Вольт. Габаритные размеры платы 52х40мм. Этот продукт представляет собой собранный модуль.&nb..
9.60 лв.
Аудиоусилитель 20 Вт — в сборе
Аудиоусилитель, реализованный на двух микросхемах TDA2003 в мостовом соединении. — Выходная мощность — 20 Вт. — Источник питания постоянного тока — от 8 до 18 Вольт. — Макс. ток — 3А. Габаритные размеры платы 46х34мм..
— Источник питания постоянного тока — от 8 до 18 Вольт. — Макс. ток — 3А. Габаритные размеры платы 46х34мм..
7.80 лв.
Радиомикрофон FM от 88 до 108 МГц — в сборе
Эта схема представляет собой миниатюрный передатчик в диапазоне FM от 88 до 108 МГц. Питание 9В. Габаритные размеры платы 42х18 мм. Этот продукт представляет собой собранный модуль. Также доступен как as..
0.00 лв.
Регулируемый блок питания от 1,2 до 30 В/1 А — в сборе
Данное устройство реализовано на одной микросхеме LM317T. — Входное напряжение — AC/DC макс. 30 вольт. — Выходное напряжение — от 1,2 до 30 Вольт. — I max — 1А. Габаритные размеры платы 45х28мм. Этот стр.
5.05 лв.
Блок питания Аккумуляторная батарея 12 В/3 А в сборе
Блок питания разработан на основе двух интегральных схем LM317T. Подстроечный потенциометр используется для управления выходным напряжением (от 10 до 14 В). В случае использования батареи выход v..
В случае использования батареи выход v..
9.60 лв.
DC/DC преобразователь 1A LM2575T — в сборе
Устройство представляет собой понижающий регулируемый преобразователь/стабилизатор напряжения DC-DC на интегральной микросхеме LM2575T. Защита от короткого замыкания, перегрузки и перегрева. Низкое потребление на холостом ходу..
5.50 лв.
FM-радиоприемник /от 88 до 108 МГц/ в сборе
Радиоприемник разработан на основе двух интегральных схем TDA7000, являющихся FM-приемником, и LM386, являющихся усилителем низкой частоты. Потенциометр PI используется для управления громкостью звука.
18.00 лв.
Двухтональная сирена в сборе
Эта схема реализована на одной микросхеме NE556. Источник питания постоянного тока от 9 до 18 Вольт. Габаритные размеры платы 47х33мм.
Этот продукт представляет собой собранный модуль. Также доступен в виде монтажного комплекта . .
.
7.80 лв.
Светодиодный волюметр (12 светодиодов) в сборе
Это индикатор с одной функцией, состоящий из дискретных элементов. Входной сигнал стандартный — 0,750 В (Низкий уровень). Измеритель громкости не работает выход динамика (работает только сигнал линейного уровня — от 0,500 до 1В). ..
11.50 лв.
Стерео светодиодный волюметр (2x 6 светодиодов) — в сборе
Данное устройство реализовано на 2-х специализированных ИМС КА2284 /АН6884/. IC управляет 5 светодиодами (тип 5-точечной полосы). Два входа — для левого и правого каналов. Входной сигнал стандартный — 0,750 В (Низкий уровень). ВУ..
10.00 лв.
Моно-светодиодный волюметр Звукомер + микрофонный предусилитель — в сборе
Это индикатор с одной функцией, состоящий из отдельных элементов. Схема состоит из индикатора уровня низкочастотных сигналов. Светодиодный индикатор монотипа. Тип точечной полосы. ..
Тип точечной полосы. ..
14.40 лв.
Цветомузыкальное устройство /3х3 светодиода — светодиоды/ — в сборе
В устройстве используются транзисторы. Тл и Т2 — микрофонный предусилитель, чувствительность микрофона регулируется триммером. Фильтры реализованы через резисторы и конденсаторы, арт.
10.30 лв.
Микрофонный предусилитель в сборе
Это устройство представляет собой транзисторный предусилитель с электретным микрофоном, подключенным на входе. Источник питания постоянного тока — от 3 до 12 Вольт. Габаритные размеры платы 37х21мм. Этот продукт является ослом..
3,55 лв.
Автосигнализация 2 — в сборе
Система сигнализации разработана на базе микроконтроллера фирмы Microchip. Имеет следующие функции: — Время активации (время, необходимое для выхода после активации..
0.